
就如同各位從零開始的夥伴們,你們一定很想快點看到,一台可以裝上雷射LiDAR導航,自主漫遊 + 路徑規劃 + 自主避障 + 影像AI &^$%^#%%^%^&%^ ~ 等等集合了目前self-driving 前端科技的家用小車八 !! 我們記錄一位工程師,他是如何從零開始的學習、蛻變到一位 self-driving developer的過程。
話說,這一開始的動作應該也是記錄摸索的過程,不過,這卻是最真實的、殘酷與慘痛代價的經驗。希望這些記錄可以減少後面跟進的學習者們寶貴的時間。
1-1、遠端遙控機器人 – two ROS machines 通訊測試
在此定義初階段的學習標的 :
- 遠端遙控機器人
- LiDAR雷達建地圖
- 自主導航與避障
- 路徑規劃 (到這 ~ 基本該會的操作都已經具備了)
我們就從 “two ROS machines 通訊測試 (小烏龜遠端連線)” 開始吧 !
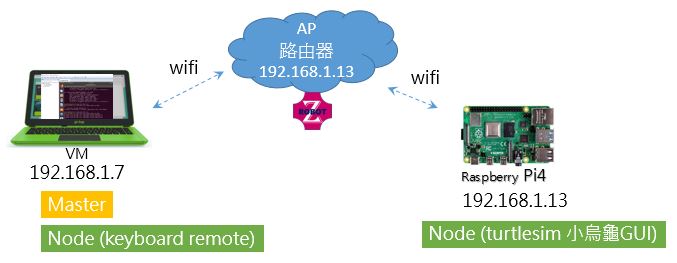
1-2、連線架構
使用裝備 :
- ACER i5 筆電 win10系統
- 樹梅派 Pi4 B (2020 年最新版)
測試架構 :
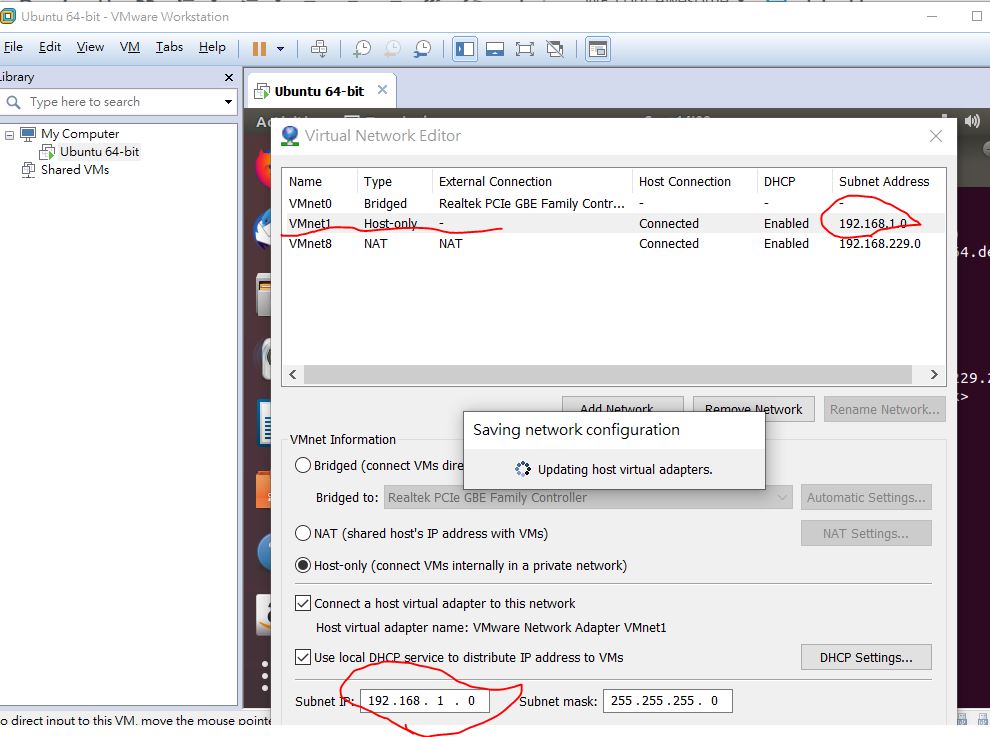
 1-2、VM(虛擬機)設定網路連線
1-2、VM(虛擬機)設定網路連線
先去 Edit –> Virtual Network Editor… 指定你要用哪個虛擬機,本次用內建的VMnet1,隨即檢查它的內建分配網域,要改成192.16.1.o 的網段,以便跟目前測試網路AP所分配的IP同一個網段。 如下
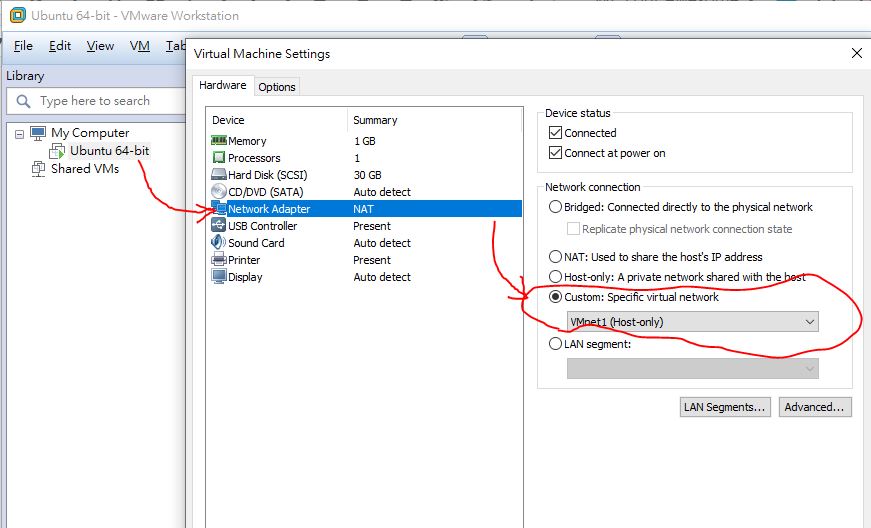
接著到我們的開啟的虛擬機,去選擇 “virtual machine setting” ; 這裡我們選 Custom – VMnet1 ,來使用我們自己設定的虛擬網路
這時,你會發現 vm中的 VMnet1被分配到 192.168.1.128。 當然,若是你要自己指定其他網路等級的ip 如 10.42.xx.xx ,也可以如上圖自己指定。
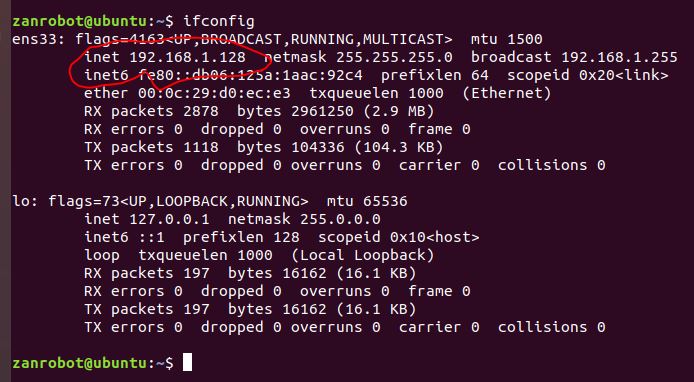
此時,到pi 的終端機去檢查有無連上vm裡面的ubuntu,如下 ping 192.168.1.128。同樣地,也從vm中ping一下pi看看有無正確連上。

此時本網路個裝置測試的ip 如下 :
通常在vm設定虛擬網路的時候,許多人會出現問題 ,請務必檢查電腦端網路橋接的結果要正確 :
如下圖,網路橋接器的裝置名稱,不可以是”無法辨識的網路”,否則橋接wifi 實體網卡仍然是不成功喔 !
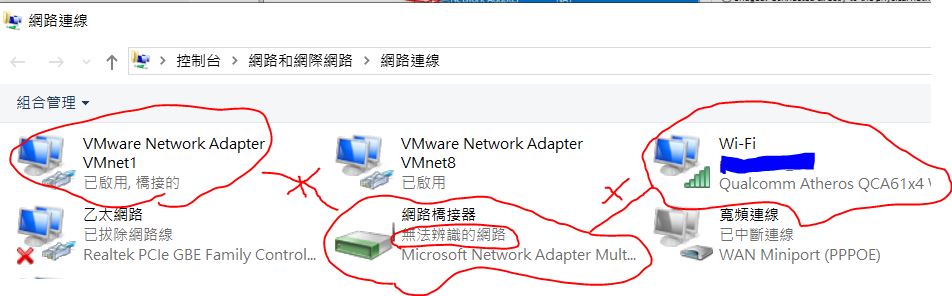
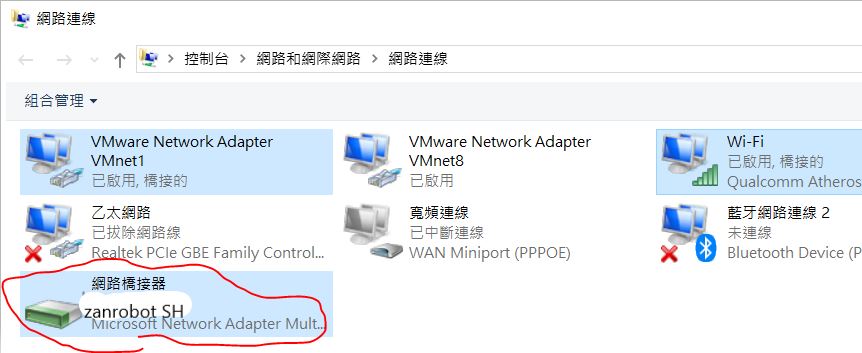
成功的話如下圖 :
1-3. 指定ROS管理資訊發佈與接收訊息的Master機器
ROS的通訊架構其實很簡單,就像遊戲中的角色扮演,你要台ROS機器擔任甚麼角色都可以,只要一開始指定清楚即可,本次架構如下:
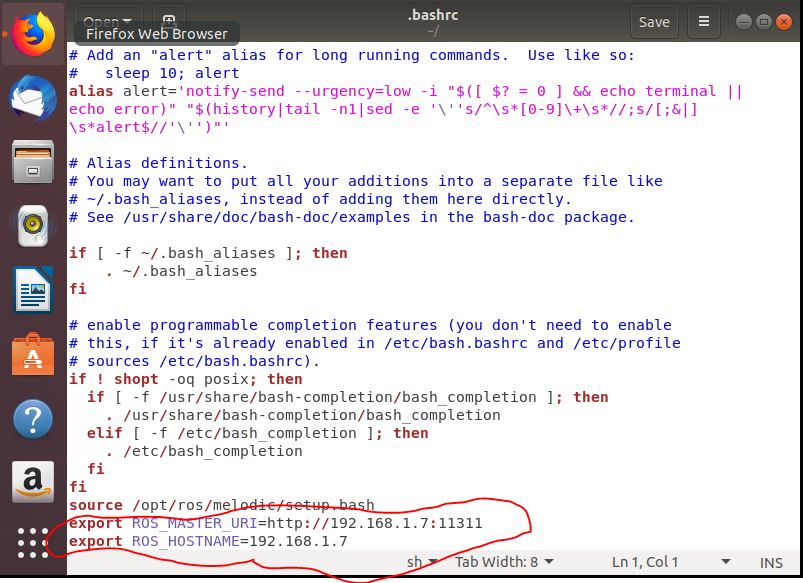
1. 編輯vm虛擬機器端的環境變數設定檔。
我們需先開起虛擬機器上的 Terminal ,輸入指令進入其中的環境變數設定檔。
使用 gedit 編輯環境變數設定檔指令:sudo gedit ~/.bashrc
檔案開啟後,在最後面加上兩行敘述,如下
export ROS_MASTER_URI=http://192.168.1.7:11311
export ROS_HOSTNAME=192.168.1.7
同樣地,在pi4 上面執行上述動作,增加以下兩行
export ROS_MASTER_URI=http://192.168.1.7:11311
export ROS_HOSTNAME=192.168.1.13
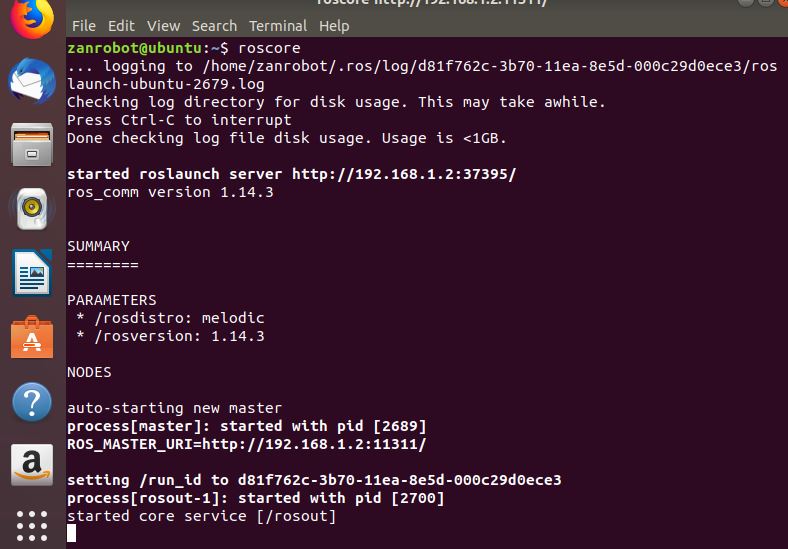
2. 在VM虛擬機中開始遙控小烏龜
先在區域網路上註冊一個 Master。註冊 Master 指令 : roscore 。我們選PC的VM虛擬機來註冊master
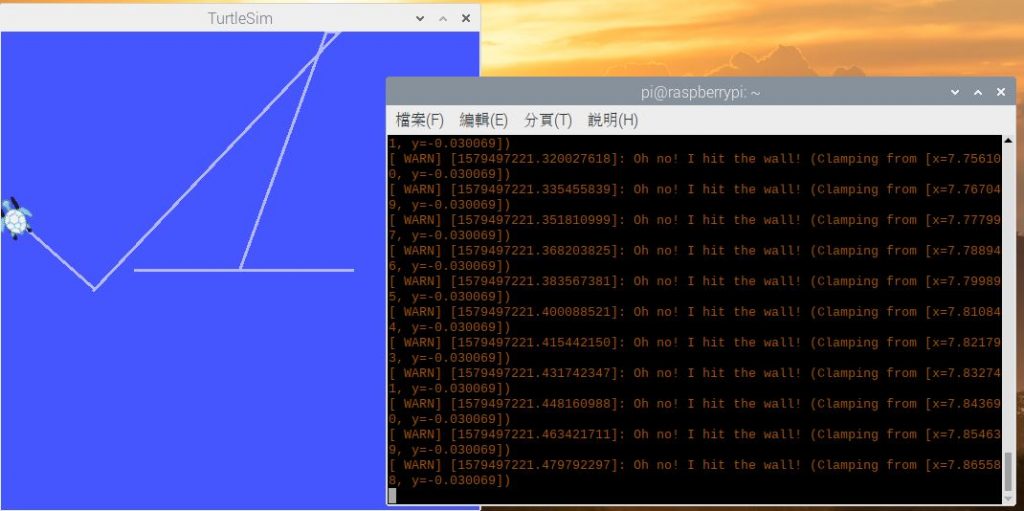
2. 樹莓派端執行 turtlesim_node 節點。執行 turtlesim_node 節點
指令 : rosrun turtlesim turtlesim_node
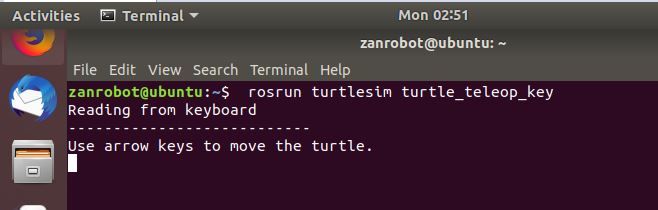
3. 虛擬機器執行 turtle_teleop_key 節點。要再開一個新的terminal,執行 turtle_teleop_key 節點
指令 : rosrun turtlesim turtle_teleop_key
以上就是所有的動作了。祝各位順利 !
Damaris says:
Every weekend i used to pay a visit this web site,
for the reason that i want enjoyment, since this this
website conations in fact pleasant funny information too.
Maryann says:
always i used to read smaller posts which also clear their motive, and that is also happening
with this article which I am reading at this place.
Jacques says:
Hello, the whole thing is going nicely here and ofcourse every one issharing data, that’s truly good, keep up writing.
Patricia says:
Woah! I’m really digging the template/theme of this website.
It’s simple, yet effective. A lot of times
it’s very hard to get that “perfect balance” between usability and visual appeal.
I must say you’ve done a very good job with this.
Also, the blog loads extremely fast for me on Firefox.
Excellent Blog!
Dylan says:
Die Taktikkarte zu den „Alten Bekannten“ ist nicht, wie angegeben, von Shandrogar.Diese „seine“ Taktikkarten sind auch wirkliche Taktikkarten, die die benötigten Einheiten und die Anzahl der Gegner verzeichnen. Zudem Vorschläge zu der Quantität der verschiedenen angreifenden Einheiten. Dies alles ist in dieser Karte leider nicht zu finden. Eine Nummerierung bezieht sich lediglich auf eine Reihenfolge,die auch in Frage zu stellen ist.Gibt es hierzu eine nennenswerte Alternative?Für die Antwort bedanke ich mich schon im Vorraus!FGAntec
Willy says:
It’s actually a great and useful piece of information. I’m glad that you simply shared this useful info
with us. Please keep us up to date like this. Thanks
for sharing.
Ivan says:
Very good info. Lucky me I recently found your site by chance (stumbleupon).
I have saved it for later!
Buddy says:
It’s going to be finish of mine day, except before finish I am reading this wonderful article
to increase my know-how.
Celeste says:
I like it when people come together and share ideas.Great website, continue the good work!
Blanca says:
This post will help the internet visitors for creating new blog or even a weblog from start to end.
Josue says:
Hello my friend! I wish to say that this article is amazing, greatwritten and include almost all vital infos.I’d like to see more posts like this .
Mitchel says:
Its such as you learn my mind! You seem to understand a lot about this, like you
wrote the guide in it or something. I believe that you simply could do
with a few p.c. to power the message home a bit, but other than that,
that is magnificent blog. A great read. I will definitely be back.
Tracie says:
Greetings, I do think your website could possibly be having browser compatibility problems.Whenever I look at your blog in Safari, it looks fine but when opening in I.E.,it’s got some overlapping issues. I just wanted to give you a quick heads up!Other than that, excellent website!
Louvenia says:
I have read so many articles or reviews on the topic of the blogger lovers except this article is genuinely a pleasant article, keep it up.
Holley says:
Everyone loves what you guys are usually up too. Such clever work and exposure!
Keep up the wonderful works guys I’ve included you guys to blogroll.
Therese says:
Stunning story there. What occurred after? Thanks!
Alta says:
Its such as you read my mind! You seem to grasp so much
approximately this, like you wrote the guide in it or something.
I think that you simply could do with a few percent to pressure the
message home a little bit, however instead of that, this is
great blog. A great read. I will certainly be back.
Augustus says:
I pay a quick visit daily a few web sites and websites
to read content, except this webpage gives quality based articles.
Claire says:
I am no longer positive where you are getting your info, but great topic.
I must spend a while studying much more or
working out more. Thanks for magnificent information I
used to be in search of this information for my mission.
Hermelinda says:
For the reason that the admin of this web page is working, no question very rapidly it will be famous,
due to its quality contents.
Eveline says:
I was more than happy to uncover this page.I want to to thank you for ones time for this particularly wonderful read!!I definitely liked every part of it and I have you saved to fav to check out new thingsin your web site.
Johnnie says:
Hello to all, the contents existing at this website
are genuinely amazing for people knowledge, well, keep up the nice work fellows.
bay way says:
Enjoyed every bit of your article.Much thanks again. Keep writing.
Jens says:
Tremendous things here. I’m very satisfied to look your post.
Thanks a lot and I am having a look forward to touch you.
Will you kindly drop me a mail?
Theodore says:
I love your blog.. very nice colors & theme. Did you
design this website yourself or did you hire someone to do
it for you? Plz respond as I’m looking to construct my own blog and would like to know
where u got this from. many thanks
open singapore company says:
That is a really good tip particularly to those new to the blogosphere. Brief but very accurate infoÖ Appreciate your sharing this one. A must read article!
Sonya says:
Some genuinely good information, Gladiola I detected this. «The Diplomat sits in silence, watching the world with his ears.» by Leon Samson.
Elisha Dewberry says:
http://hoste-obec.sk/?p=404
Jae Pashel says:
https://transmedios.tv/cine-tonala-tijuana/
Chanda says:
It is not my first time to go to see this web site, i am browsing this web page dailly and get nice
information from here everyday.
Tania says:
Hi to all, it’s really a good for me to pay a quick visitthis web site, it includes priceless Information.
Warner Steckelberg says:
https://chicanoticias.com/2021/10/12/los-camilos-lucharan-por-coronarse-reyes-del-festival-vallenato-2021/
Toney Margotta says:
http://www.teardropsandtravels.com/daydream-as-often-as-you-can/
Micah Dunkelberger says:
http://www.cienciadaspsicologias.com.br/2012/03/26/excesso-de-limpeza-pode-levar-a-doencas-inflamatorias/
Dianna says:
When I initially commented I seem to have clicked on the -Notify me when new comments
are added- checkbox and from now on each time a comment is added I receive
four emails with the exact same comment. Perhaps there is a means you can remove me from that
service? Thanks a lot!
Josefa Cane says:
http://www.shaoyage.net/2008/05/post-8.html
Loan Bondi says:
http://drums.tmenmarketing.com/cover_drive_-_twilight_woody_remix_free/
Kenton Gaden says:
http://www.djbobbytrends.com/blog/kicks-air-jordan-4-retro-gs-ultraviolet-available-on-ebay/
Raymundo Diemert says:
https://www.todaypaana.com/how-to-fix-your-sleep-problems-with-science/
Merry Niro says:
https://criptofans.net/google-elimina-8-cripto-aplicaciones-fraudulentas-de-la-play-store/
Shanita Murril says:
http://www.ly222l.com/posts/99687.html
Ike Kawata says:
http://madblog.smagssagen.dk/2011/10/16/anmeldelse-af-arstidernes-verdenskasse/
cincinnati-bounce-house-rentals-association.business.site says:
What’s Going down i am new to this, I stumbled upon this I’vefound It absolutely useful and it has aided me out loads.I am hoping to contribute & help other customers like its aided me.Good job.
geodetija says:
Yes! Finally someone writes about accessing medical cannabis.Here is my blog: Blitz Eagle CBD Gummies Reviews
wday-fun says:
Very engaging theme and layout, and also excellent material. Great job! 😀
Judie Steinbeck says:
http://geoffandrew.id.au/home/?page_id=16
Paris Cofresi says:
http://www.scuolesob.it/index.php/il-liceo-artistico/
Minna Willms says:
http://airsoft.deelfinders.com/sights-iron-dot/meprolight-springfield-tru-dot-night-sight-for-xd-45-acp-fixed-set-greengreen-4-inch-and-5-inch-barrels/
Charla Rocque says:
http://colin-goulden.gonetoosoon.org/leave_tribute/
Tattoo Designs says:
Pretty good post. I just stumbled upon your blog and wanted to say that I have really enjoyed reading your blog posts. Any way I’ll be subscribing to your feed and I hope you post again soon. Big thanks for the useful info.
Gina Devere says:
http://www.mariaozawa.net/2011/06/21/2285/13_big/
tehnicki fakultet says:
Heya i am for the first time here. I found this board and I find It reallyuseful & it helped me out a lot. I hope to give something back andhelp others like you helped me.
Suellen Vallot says:
http://www.inkwelldesigns.net/#comment-832
Lenny Laitinen says:
http://truffo.fr/breve/quy-a-til-au-dos-des-sites-web/
Juan Bergmark says:
http://strawberryblushes.wordpress.com/2008/05/23/wow/
sell property quickly says:
best pill for ed: erection pills – best pills for ed
DennisSpIty says:
It appears as if some of the text on your content are running off the screen.
Read Full Report says:
vyvanse canadian pharmacy pharmacy store nearby
Don Hefflinger says:
https://rangpur24.com/E0A6B9E0A6BEE0A6B0E0A6BEE0A697E0A6BEE0A69BE0A787-E0A6A5E0A6BEE0A6A8E0A6BE-E0A6AAE0A781E0A6B2E0A6BFE0A6B6-E0A695E0A6B0E0A78DE0A6A4/E0A6B0E0A682E0A6AAE0A781E0A6B0/
Gus Feagan says:
http://golfironsbagsshoesaccessories.com/pointers-to-make-your-next-round-a-success/
Donnie Mcanulty says:
http://moisesespinosa.wordpress.com/2011/04/20/oracle-critical-patch-update-advisory-april-2011/
Lauren Papranec says:
http://ramonramon.org/blog/2007/06/06/hispalinux-contra-los-malos-politicos/
Kerry Hatchette says:
http://terjemarlin.blogyd.com/2012/02/0903_tveducated_michelle_.html
Daren Temby says:
http://pth.hardytx.com/when-to-get-kidnapping-insurance/
Lorri Cantv says:
http://www.grandrefine.cz/elektronick-azen-shimano/
Harold Kushiner says:
http://www.wherecanifindgirls1.com/31/new-girlfriends/
Candy Krzewinski says:
http://cityclicks.biz/create-training-videos-common-questions-and-answers/
Loreta Rolla says:
http://zapillo.wordpress.com/2008/01/31/receta-medica/
Janel Astrup says:
http://marriedwithdebt.com/2012/01/best-personal-finance-writing-week-3/
Cris Tibbetts says:
http://saleappliancesparts.spi-blog.com/2012/02/14/ge-mswf-refrigerator-water-filter-1-pack/
dvagusya.com.ua says:
essay writing software essay writer easy essay writer
Russel Weller says:
http://bendorf.edublogs.org/2012/03/14/9-school-assignment-cars/
you can check says:
margins for resume resume services online parts of a resume
Noreen Floren says:
http://simply-phones.co.uk/?p=290
Leif Farbman says:
http://tabletkinaodchudzanie.net.pl/2011/06/12/schudnac-w-13-dni/
malaysia seo says:
F*ckin’ awesome issues here. I’m very happy to peer your post. Thanks so much and i’m looking ahead to contact you. Will you kindly drop me a mail?
Yolando Streat says:
https://myphonelocater.com/2019/07/01/3-ways-how-to-find-lost-iphone/use-find-my-iphone-to-find-lost-iphone-2/
Kindra Maidonado says:
http://apccaboolture.com.au/blog/post-construction-termite-perimeter-treatment/
bukit jalil new condo says:
What’s up, just wnted to tell you, I enjoyed this blog post.It was practical. Keep on posting!(animal jobs for 13 year olds) – –
https://www.casinoktx.com/ says:
order modafinil provigil for sale – provigil medication
Letty Ballerini says:
http://www.rayrucksdashelcfo.com/2012/01/04/b2b-cfo-named-in-prestigious-inc-5000-list/
Teofila Zebrowski says:
https://www.detetiveagatha.com.br/detetive-particular-em-sao-paulo/detetive-particular-em-sumare-sp/
Lenny Badillo says:
http://5thelementmovement.com/unleashed/sunday-april-1-2012/
Bronwyn Fulson says:
http://gf.carrieshosting.com/?p=24
Nu Polhill says:
http://vitrioni123456.blog.ca/2012/02/27/the-bb-gun-explored-and-explained-12941357/
Wilma Eschete says:
http://www.wrightoflife.com/2012/02/12/a-must-read/
Earlie Kasahara says:
http://prtienecojones.com/yo-soy-busca-tu-pueblo-de-pr/villalba/
how to sell your house for sale by owner says:
Greetings! Very useful advice in this particular post! It’s the little changes which will make the greatest changes. Thanks a lot for sharing!
air knife coating machine says:
tadalafil/sildenafil combo tadalafil pulmonary arterial hypertension
freshrags.com says:
Hello there, just became alert to your blog through Google, andfound that it’s truly informative. I am gonna watch outfor brussels. I’ll be grateful if you continue thisin future. A lot of people will be benefited fromyour writing. Cheers!
Kevin Gorrindo says:
http://blog.pamonfifth.com/2012/01/23/wallace-chan-work-of-arts/black-opal-fly/
Kaila Doak says:
http://medicalmarijuanavirginia.net/2011/04/21/my-kushy-new-job-from-gq-magazine-2/
Vernon Michon says:
http://www.brad-hollister.com/senior-zach-sanders-leads-the-way-for-top-ranked-minnesota/brad-hollister-wrestling
Von Debuhr says:
http://whattheeff.co/2011/04/23/douchebags/
Elijah Mclauren says:
http://elmochase1230.edublogs.org/2011/07/23/cure-upset-stomach/
Wilburn Nozicka says:
http://www.peaceby2050.com/performance-anxiety/
ateroskleroz sosudov golovnogo mozga says:
writing essays in collegesocial media essayessay template
Isidro Foesch says:
http://www.digiturkmersin.com/#comment-824
Debbi Hendrick says:
http://medicalmarijuanavirginia.net/2011/04/21/medical-marijuana-bust-leads-to-arrests-at-lombard-hote/
Damon Micucci says:
http://cheap.eoakley.net/341.html
https://nebraskahistory.org says:
Actually no matter if someone doesn’t be aware of afterwardits up to other viewers that they will assist, so here ittakes place.
aabbx.store says:
aabbx.store
Jeans Pant Supplier Bangladesh says:
order modafinil modafinil online modalert
Sommer Meddaugh says:
http://seananddanci.com/blog/?p=398
www.erion1107-pukiwiki.erion1107.net says:
Regarding the only reliable info anyone notice
are those that you read in buyer boards and the ones suggested by troubled
players who’ve expert playing in that casino.
willkommensbonus 200% bis zu 550€ kein code notwendig says:
On the other hand, you’ll find techniques that if well used, boost your chances of successful.
www.adminsoft.awardspace.biz says:
Es ist kleinere Skepsis die Globus von webbasierte
Casinos gewachsen schnell, explodier in ein Haupt Markt
in selbst von Jahren.
browse says:
It’s an remarkable article for all the online people; they will obtain benefit fromit I am sure.
Christoper Kam says:
http://gingudesigns.com/articles/eazy-theme-premium-wordpress-theme
https://webdataparsing.com/ says:
there are textured table linens which are much better than untextured table linena’
Tax Accountant UK says:
what causes ed – what blood pressure medication does not cause erectile dysfunction best otc ed pills
Evelin Dyreson says:
Simply a smiling visitant here to share the love (:, btw great design .
self assessment tax return accountant says:
Aw, this was a really nice post. Taking the time and actualeffort to produce a top notch article… but what can I say… I procrastinate a whole lot and don’t manage to get anythingdone.
aabbx.store says:
мертвый внутри
Karin Schoff says:
I like this post, enjoyed this one thanks for posting. “Fear not for the future, weep not for the past.” by Percy Bysshe Shelley.
cvuzwudva says:
гуль дед инсайд
gwteejrfb says:
что значит дед инсайд
yen tinh che la gi says:
what is shelf life of sildenafil citrate sildenafil powder bulk sildenafil citrate forum
szzlmrqom says:
дед инсайд
cgdxjxmce says:
мертвый внутри
Jasper Elson says:
But wanna comment on few general things, The website design is perfect, the subject matter is really superb : D.
https://www.doubledpartyrentalsllc.com/ says:
great issues altogether, you just gained a new reader. What would you recommend about your post that you just made a few days in the past? Any certain?
dunk tank rental says:
I enjoy what you guys are up too. This sort of clever work and reporting!Keep up the wonderful works guys I’ve incorporated you guys to my blogroll.
water slide rentals McAllen says:
I do ttrust all the ideas you’ve introduced in your post.They’re really convincing and will certaihly work. Nonetheless, thee posts are too short for newbies.May just you please lengthen them a bit from subsequent time?Thanks foor the post.
Milo Virts says:
As soon as I discovered this internet site I went on reddit to share some of the love with them.
Aldo Mbonu says:
Hello very cool site!! Man .. Beautiful .. Superb .. I will bookmark your website and take the feeds additionally…I’m satisfied to seek out so many helpful info here within the put up, we’d like develop extra techniques on this regard, thanks for sharing.
Alfred Phillips says:
canadian pharmacy meds review 77 canadian pharmacy – canadian pharmacy king reviews
View here says:
Howdy! I could have sworn Iíve been to your blog before but after going through a few of the articles I realized itís new to me. Regardless, Iím certainly delighted I stumbled upon it and Iíll be bookmarking it and checking back regularly!
zvtbekn says:
https://clck.ru/amCCm
rxlsfyv says:
https://clck.ru/amCCm
Water slide rentals DeSoto Rent a bounce house near me says:
college essay writer write an essay for me dissertation help online
jumpandsliderental.com says:
prednisone side effects prednisolone tablets
tpjalpo says:
https://clck.ru/amCCm
Elfriede Mitchell says:
I blog quite often and I truly appreciate your content. This great article has really peaked my interest. I am going to take a note of your blog and keep checking for new details about once per week. I subscribed to your Feed too.
Karol Barriger says:
I was reading some of your articles on this website and I conceive this website is rattling instructive! Continue posting.
hfbibhk says:
https://clck.ru/amCCm
madjudt says:
https://clck.ru/amCCm
cuidado piercing says:
An intriguing discussion will probably be worth comment. I do believe that you can write regarding this topic, may possibly not often be a taboo subject but generally individuals are inadequate to communicate on such topics. Yet another. Cheers
zzcznlk says:
https://clck.ru/amCCm
igztrwr says:
https://clck.ru/amCCm
vasgaba says:
https://clck.ru/amCCm
www.gowpcare.com/ says:
ivermectin heartworm prevention ivermectin medication
dxgjjpu says:
https://clck.ru/amCCm
ruusehv says:
https://clck.ru/amCCm
gvdohfk says:
https://clck.ru/amCCm
yqhhedv says:
https://clck.ru/amCCm
bdlhsmc says:
https://clck.ru/amCCm
vtovrhq says:
https://clck.ru/amCCm
zkarljm says:
https://clck.ru/amCCm
llklpae says:
https://clck.ru/amCCm
qnclvzt says:
https://clck.ru/amCCm
gowpcare says:
plaquenil medication generic chloroquine phosphate
vszfwcx says:
смотреть фильм крик крик фильм 2022
Vernell Schmeichel says:
I like this post, enjoyed this one appreciate it for posting. “Good communication is as stimulating as black coffee and just as hard to sleep after.” by Anne Morrow Lindbergh.
Rosena Them says:
I reckon something really special in this site.
upkyrsd says:
смотреть крик смотреть крик
xjsdqbe says:
крик онлайн фильм крик
njyzonc says:
крик смотреть онлайн бесплатно смотреть крик
ivmopar says:
смотреть крик фильм онлайн крик
pahruai says:
фильм крик крик фильм онлайн
canqdnc says:
крик онлайн крик фильм онлайн
oezoskd says:
крик фильм 2022 крик смотреть онлайн
tax on property Income UK says:
I want to to thank you for this excellent read!! I certainly enjoyed every bit of it. I’ve got you book marked to look at new things you postÖ
kneaalt says:
крик смотреть онлайн фильм онлайн крик
https://alcodru.com says:
Pretty! This was an extremely wonderful post. Many thanks for providing thisinfo.
sokrashhat` ssylku says:
modafinil pill modalert 200 – modafinil generic
bao gia xay nha tron goi says:
I’m truly enjoying the design and layout of your blog. It’s a veryeasy on the eyes which makes it much more pleasant for me to come here and visit more often. Did you hire out a designer to create your theme?Fantastic work!
Learn This Here Now says:
apartment 407 30m$ scam tokensale apartments for rent in north carolina
https://www.backyardpartyrentalsllc.com/ says:
You can certainly see your enthusiasm within the work you write.The sector hopes for even more passionate writers like you who are not afraid to say how they believe.Always go after your heart.
Salena Kudley says:
magnificent points altogether, you simply gained a new reader. What might you suggest about your publish that you simply made a few days in the past? Any sure?
Ervin Tijerino says:
I truly enjoy studying on this website , it holds great blog posts. “The longing to produce great inspirations didn’t produce anything but more longing.” by Sophie Kerr.
comprar paneles solares colombia says:
I read this paragraph completely regarding the difference of hottestand preceding technologies, it’s awesome article.
kim tay nguyen says:
Hey There. I found your blog using msn. This is areally well written article. I will be sure tobookmark it and return to read more of your usefulinfo. Thanks for the post. I will certainly return.
Click Here To Investigate says:
It’s actually a cool and helpful piece of information. I’m glad that you just shared this useful info with us. Please stay us informed like this. Thank you for sharing.
you can check says:
Hi mates, its fantastic article concerning cultureand fully explained, keepit up all the time.
view says:
Really great article. I’ll return to read more. Thank you for creating it.
Snapchat says:
Papaz Büyüsü 20 Nov, 2021 at 7:24 am Awesome blog article.Really looking forward to read more. Really Great.!!!!
Bounce house rentals Minneapolis says:
ivermectin pills canada – stromectol tablets generic name for ivermectin
Enquiry says:
These are really fantastic ideas in about blogging.You have touched some pleasant points here.Any way keep up wrinting.
You Could Try This Out says:
Enjoyed every bit of your blog article.Thanks Again. Fantastic.
bsyhcbm says:
http://bitly.com/Batman-2022
MaxNfuze says:
Just bookmarked this blog post as I have found it fairly useful.
maldives holidays march 2022 says:
Hi there, just wanted to tell you, I enjoyed thispost. It was funny. Keep on posting!
Zackary Laursen says:
It is actually a great and helpful piece of info. I am happy that you simply shared this useful information with us. Please keep us up to date like this. Thanks for sharing.
click to read says:
Wonderful blog! I found it while searching on Yahoo News. Do you have any tips on how to get listed in Yahoo News? I’ve been trying for a while but I never seem to get there! Cheers
elektro trottinett für kinder says:
When someone writes an paragraph he/she keeps the image of a user in his/her mind that how a user can understand it.Therefore that’s why this paragraph is outstdanding. Thanks!
Get more SaaS Users says:
It’s an awesome piece of writing designed for all the online users; they will take benefit from it I am sure.
opiniones de kale anders says:
It is in reality a nice and helpful piece of info. I’m glad that you just shared this useful information with us. Please stay us informed like this. Thanks for sharing.
Tax Accountant says:
An interesting discussion is definitely worth comment. I do think that you ought to write more on this subject matter, it may not be a taboo subject but typically folks don’t discuss such topics. To the next! Many thanks!!
Saas management Platform says:
I want to to thank you for this great read!!I certainly loved every bit of it. I have you saved as a favorite to check out new stuff you post?
Sirsmuct says:
dark web market darkmarket link
Click This says:
Great write-up, I¦m regular visitor of one¦s blog, maintain up the nice operate, and It’s going to be a regular visitor for a long time.
cash out says:
I really like and appreciate your blog article.Really thank you! Awesome.
Website Link says:
This is a very good tip especially to those fresh to the blogosphere. Brief but very accurate informationÖ Appreciate your sharing this one. A must read article!
tapet says:
Great article. Great.
JimLib says:
dark market list dark market list
Sirsmuct says:
darknet marketplace dark0de url
DavidWhaft says:
dark web link deep web drug store
Samuelnum says:
darknet drug links deep web drug store
rechargeable bullet vibe says:
Really enjoyed this blog article.Really looking forward to read more. Will read on…
Describes It says:
Nice read, I just passed this onto a friend who was doing some research on that. And he actually bought me lunch since I found it for him smile Thus let me rephrase that: Thanks for lunch!
BobbyEvinc says:
dark web sites dark market onion
Dezzyvurse says:
deep web markets dark market
Patricktug says:
dark web market list darkmarket
LennyCop says:
deep web drug links dark web link
Dylannot says:
dark web markets tor markets links
Williamliacy says:
dark web market darkode url
OzzyMip says:
deep web drug url darkmarket list
TimKal says:
dark web drug marketplace deep web markets
JennyMip says:
dark market link darkmarket link
Rodger Pilati says:
Rattling good information can be found on site . “I said I didn’t want to run for president. I didn’t ask you to believe me.” by Mario M Cuomo.
Ashleybar says:
dark market list dark web sites
DonnyCop says:
darknet market list darknet drug links
Sharylhilla says:
darkmarket dark market link
DennyCop says:
tor market url dark market url
Versusvurse says:
dark web market bitcoin dark web
Johnnot says:
dark web drug marketplace deep web drug url
Rickvurse says:
dark web sites drug markets dark web
DiamondEvinc says:
darknet marketplace dark market
DavidWhaft says:
dark markets 2022 dark0de link
Sirsmuct says:
dark markets 2022 darkmarket 2022
TeddyMip says:
darkmarket list darknet markets
Ricconot says:
best darknet markets dark web market list
Diedraovers says:
darknet websites dark web market links
Samuelnum says:
dark web link darkmarket 2022
Kellydum says:
dark market link tor markets 2021
TimKal says:
heineken onion dark web market list
Dezzyvurse says:
deep web drug store darknet drug links
Sirsmuct says:
darkmarket 2021 dark market url
DavidWhaft says:
tor marketplace dark web market
Williamliacy says:
dark web market darkode reborn link
Bobb1Evinc says:
darkmarket list dark web market list
BobbyEvinc says:
tor dark web deep web markets
LennyCop says:
deep web markets darkmarket url
Anoldvurse says:
darkmarket list deep web drug store
Sirsmuct says:
darknet marketplace dark web drug marketplace
DennyCop says:
darknet drug market deep web markets
FelixMip says:
darknet drug store dark web markets
DonnyCop says:
tor markets 2021 drug markets onion
Ashleybar says:
dark market 2022 best darknet markets
LawrenceCop says:
darkmarket link tor market links
Rickvurse says:
tor markets links darknet markets
Josenot says:
darknet market lists tor markets links
Dylannot says:
best darknet markets darknet drug market
OzzyMip says:
dark web markets darkmarket 2021
DavidWhaft says:
dark web link tor markets 2022
Sharylhilla says:
darknet drug links darknet market lists
PedroEvinc says:
dark web market darknet market list
mwxfxym says:
Одиннадцать молчаливых мужчин
Sirsmuct says:
tor market links darknet marketplace
JennyMip says:
tor markets links darkmarket
Versusvurse says:
dark market darknet market links
TimKal says:
dark web market list dark web sites
Patricktug says:
tor marketplace dark market
Diedraovers says:
drug markets onion darknet marketplace
Johnnot says:
dark web sites tor market
DiamondEvinc says:
darkmarket 2022 darknet drug market
Dezzyvurse says:
darkmarket 2022 tor markets 2022
Samuelnum says:
darknet marketplace darknet drug market
Ricconot says:
deep web markets drug markets dark web
TeddyMip says:
darknet market lists darknet markets
LennyCop says:
darknet marketplace tor dark web
Anoldvurse says:
best darknet markets deep web markets
DennyCop says:
darkmarket 2022 tor market links
LawrenceCop says:
tor market url darknet drug store
Kellydum says:
dark markets 2022 heineken onion
DavidWhaft says:
dark web market links drug markets onion
Bobb1Evinc says:
dark market darknet marketplace
JimLib says:
tor markets links tor market url
Ashleybar says:
dark web drug marketplace darkmarket link
Sirsmuct says:
darkode reborn link darknet drug store
Williamliacy says:
dark0de market darknet market
Sharylhilla says:
tor market tor markets 2021
Rickvurse says:
dark web drug marketplace deep web drug store
BobbyEvinc says:
best darknet markets darknet market list
DonnyCop says:
deep web drug markets best darknet markets
Versusvurse says:
deep web drug url darkmarket 2022
FelixMip says:
deep web drug links dark market 2022
TimKal says:
tor market url drug markets dark web
Dylannot says:
best darknet markets tor markets 2022
PedroEvinc says:
darknet drug links darkmarket list
OzzyMip says:
dark market list dark markets 2022
silicone vibrator says:
Im obliged for the blog post.Much thanks again. Will read on…
JennyMip says:
tor market links darknet market lists
Sirsmuct says:
darkode link dark market link
Diedraovers says:
darknet drug market darknet drug market
Johnnot says:
darkmarket url darknet websites
Patricktug says:
darkmarket 2021 darknet market
Dezzyvurse says:
darknet drug store deep web drug markets
DiamondEvinc says:
darknet market lists drug markets dark web
Samuelnum says:
dark0de link dark0de darknet market
Anoldvurse says:
darkmarket url bitcoin dark web
Ricconot says:
dark market url darknet websites
DavidWhaft says:
tor markets 2021 darkode link
LennyCop says:
darknet markets tor marketplace
TeddyMip says:
darknet markets tor markets 2021
JimLib says:
darknet drug links deep web drug store
LawrenceCop says:
tor market links deep web drug store
Ashleybar says:
darknet drug links tor markets 2022
Rickvurse says:
drug markets onion tor markets 2022
DonnyCop says:
dark market onion darknet market links
Bobb1Evinc says:
dark markets 2022 dark web markets
Sharylhilla says:
darkmarket link dark web drug marketplace
TimKal says:
bitcoin dark web darkmarket 2022
Josenot says:
tor market links darknet markets
BobbyEvinc says:
deep web drug markets darknet drug links
Williamliacy says:
dark market link deep web markets
Sirsmuct says:
darkode url dark market link
Kellydum says:
tor dark web dark web market list
Versusvurse says:
dark market 2022 darknet market list
Dylannot says:
dark market onion dark web drug marketplace
PedroEvinc says:
best darknet markets deep web markets
DennyCop says:
drug markets onion tor marketplace
OzzyMip says:
deep web drug store darknet marketplace
DiamondEvinc says:
dark web markets dark web market links
Dezzyvurse says:
tor markets links tor market
Patricktug says:
darkmarket 2021 dark web link
Johnnot says:
tor market url deep web drug url
LawrenceCop says:
darkmarket 2021 dark market 2022
LennyCop says:
tor markets links best darknet markets
Anoldvurse says:
darknet market lists darkmarket 2021
Samuelnum says:
dark web market tor market url
DavidWhaft says:
tor markets 2022 deep web drug markets
TimKal says:
darkmarket link tor markets links
Ashleybar says:
deep web drug markets darkmarket
DonnyCop says:
darkmarket dark web link
Ricconot says:
tor market url dark market 2021
TeddyMip says:
dark market 2021 darknet drug links
Williamliacy says:
tor markets 2022 drug markets dark web
Rickvurse says:
deep web markets dark web link
Sirsmuct says:
drug markets onion dark web drug marketplace
Sharylhilla says:
dark market url tor market
BobbyEvinc says:
tor markets 2021 darkmarket 2022
JimLib says:
dark web market links darkmarket 2022
Patrickevali says:
darknet markets dark web markets
Diedraovers says:
darknet websites dark market list
Bobb1Evinc says:
dark web drug marketplace deep web drug store
PedroEvinc says:
dark market 2021 tor dark web
Versusvurse says:
deep web drug store dark market
DennyCop says:
darknet market lists dark web market
FelixMip says:
dark web market drug markets onion
Josenot says:
tor markets links tor dark web
Kellydum says:
dark web market tor market url
???????? ????? says:
What’s up, its nice paragraph about media print,we all be aware of media is a fantastic source of data.
Patricktug says:
deep web drug url darknet marketplace
Dezzyvurse says:
darkmarket dark market link
Dylannot says:
dark web market list deep web drug markets
DiamondEvinc says:
tor market url drug markets dark web
JennyMip says:
darkmarket 2022 tor marketplace
DavidWhaft says:
darkmarket url tor markets links
Rickvurse says:
dark web market darknet market lists
OzzyMip says:
dark market onion tor market
LawrenceCop says:
darkmarket 2022 dark market onion
Ashleybar says:
deep web drug markets drug markets dark web
DonnyCop says:
darknet market lists drug markets onion
Sirsmuct says:
darknet drug market darkmarket
Samuelnum says:
darknet market list darkmarket url
Ricconot says:
dark market link dark market
Anoldvurse says:
tor marketplace dark markets 2022
TimKal says:
tor market links darknet drug market
LennyCop says:
deep web drug url dark market 2022
TeddyMip says:
darknet markets dark web markets
Williamliacy says:
tor marketplace darkode url
JimLib says:
tor dark web dark web drug marketplace
DennyCop says:
deep web drug markets darknet drug store
Bobb1Evinc says:
dark market list dark market onion
BobbyEvinc says:
tor dark web darknet drug store
Versusvurse says:
dark markets 2022 dark web market
how to sell feet for money says:
Muchos Gracias for your blog post.Really thank you!
DavidWhaft says:
darknet drug store tor dark web
PedroEvinc says:
darknet market list dark web market links
Dezzyvurse says:
dark web link deep web drug url
DiamondEvinc says:
dark market list deep web drug markets
LawrenceCop says:
tor market darknet market list
Dylannot says:
darkmarket 2021 tor markets 2022
FelixMip says:
darknet websites tor market
Williamliacy says:
dark market onion dark market
Josenot says:
darknet market darknet market links
Ashleybar says:
darknet market lists drug markets onion
TimKal says:
dark market onion best darknet markets
Patrickevali says:
dark market tor dark web
Rickvurse says:
dark web link dark market url
DonnyCop says:
darknet marketplace darknet market links
LennyCop says:
tor markets links dark web sites
Johnnot says:
best darknet markets dark markets 2022
Kellydum says:
darkmarket list dark web market
Anoldvurse says:
dark web drug marketplace dark web market list
JennyMip says:
dark web link darkmarket 2021
OzzyMip says:
dark web link dark market link
Samuelnum says:
darkmarket dark web markets
DennyCop says:
dark market darknet drug market
JimLib says:
darkmarket list deep web drug markets
Ricconot says:
darknet market list tor markets links
BobbyEvinc says:
deep web drug store darknet websites
DavidWhaft says:
dark market onion darkmarket list
TeddyMip says:
deep web markets dark web link
Versusvurse says:
darknet marketplace dark market url
DiamondEvinc says:
tor market links dark market link
Bobb1Evinc says:
tor market url darknet marketplace
PedroEvinc says:
dark market link dark web drug marketplace
Ashleybar says:
dark web market list darknet market
Diedraovers says:
tor market links tor markets 2022
Dezzyvurse says:
dark web sites darknet markets
LawrenceCop says:
bitcoin dark web bitcoin dark web
LennyCop says:
darknet market links drug markets dark web
Patricktug says:
darknet websites bitcoin dark web
Patrickevali says:
drug markets dark web dark web sites
Kellydum says:
drug markets onion dark market 2022
Williamliacy says:
dark market link darknet drug store
DonnyCop says:
best darknet markets deep web drug links
FelixMip says:
darknet market dark web link
Josenot says:
dark web drug marketplace darknet markets
Rickvurse says:
dark market url darkmarket
Anoldvurse says:
dark web market links tor dark web
DavidWhaft says:
tor dark web darkode url
Dylannot says:
darknet market list darknet drug market
Sirsmuct says:
darkode reborn link best darknet markets
Samuelnum says:
tor markets links dark market list
JennyMip says:
dark market 2022 darknet markets
DennyCop says:
tor markets 2022 dark market link
OzzyMip says:
dark market onion dark market onion
BobbyEvinc says:
dark market 2022 darknet websites
Johnnot says:
dark web drug marketplace deep web markets
tarasy kompozytowe tardex wroclaw says:
Everyone loves it whenever people get together and share opinions. Great blog, keep it up!
Versusvurse says:
drug markets onion dark markets 2022
JimLib says:
dark web drug marketplace tor dark web
Ricconot says:
dark market link best darknet markets
Sharylhilla says:
bitcoin dark web tor market
Bobb1Evinc says:
drug markets dark web darkmarket 2022
TeddyMip says:
tor markets 2021 dark markets 2022
PedroEvinc says:
drug markets onion deep web drug markets
LennyCop says:
dark web markets darkmarket list
Diedraovers says:
dark markets 2022 dark market
DiamondEvinc says:
drug markets dark web dark web link
Dezzyvurse says:
dark web markets darknet drug market
LawrenceCop says:
deep web drug url best darknet markets
Patricktug says:
tor market url darknet market links
Patrickevali says:
darkmarket list dark web drug marketplace
DavidWhaft says:
darknet marketplace darkode reborn
DonnyCop says:
darknet drug links dark web drug marketplace
Williamliacy says:
bitcoin dark web drug markets dark web
DennyCop says:
dark web market dark market link
Sirsmuct says:
dark web drug marketplace dark market onion
TimKal says:
tor market url tor dark web
FelixMip says:
darknet marketplace tor market links
Josenot says:
darknet drug market dark market
Company Registration Jaipur says:
Really informative blog post.Really thank you! Keep writing.
estimulacion temprana mes a mes pdf says:
cymbalta for depression cymbalta and fibromyalgia
Rickvurse says:
dark web sites darknet market lists
JennyMip says:
deep web drug store tor marketplace
Samuelnum says:
darkmarket link dark market onion
Sharylhilla says:
drug markets onion dark web markets
Anoldvurse says:
tor market tor markets 2022
Dylannot says:
darknet market links darknet drug market
Versusvurse says:
darkmarket list darknet market
OzzyMip says:
deep web drug url deep web drug markets
Johnnot says:
dark web link dark market list
BobbyEvinc says:
darknet market lists dark market list
Ricconot says:
deep web markets darkmarket list
LawrenceCop says:
darknet marketplace darknet market lists
Dezzyvurse says:
darkmarket 2022 darknet marketplace
curso de terapia con imanes says:
Thanks on your marvelous posting! I certainly enjoyedreading it, you may be a great author. I will always bookmark your blog and will often come backsometime soon. I want to encourage you to definitely continueyour great job, have a nice morning!
Bobb1Evinc says:
darknet websites darkmarket list
Diedraovers says:
best darknet markets dark web link
JimLib says:
darknet market links dark market 2022
TeddyMip says:
deep web drug url darknet marketplace
Patricktug says:
dark market 2021 darknet market links
DiamondEvinc says:
dark web link dark web market list
DavidWhaft says:
dark market 2022 darknet websites
PedroEvinc says:
deep web drug url tor market url
Patrickevali says:
dark market url dark market 2021
Sirsmuct says:
best darknet markets dark0de link
DonnyCop says:
dark market tor markets links
DennyCop says:
dark web market links dark market link
TimKal says:
tor market darknet market lists
Ashleybar says:
drug markets onion deep web markets
Kellydum says:
darknet market links darkmarket link
Samuelnum says:
dark0de url tor dark web
LennyCop says:
dark market deep web drug links
FelixMip says:
darknet market darknet drug links
Josenot says:
dark market url dark web market
Versusvurse says:
darknet drug store dark web drug marketplace
Rickvurse says:
tor markets 2022 dark web markets
JennyMip says:
tor market links darkmarket 2021
Anoldvurse says:
darknet market list dark web market links
Versusvurse says:
darknet websites tor market
Ricconot says:
darknet market links tor markets links
Dezzyvurse says:
tor marketplace darknet websites
LawrenceCop says:
tor marketplace dark web drug marketplace
Diedraovers says:
tor market url darknet market
Dylannot says:
dark market link dark market 2021
OzzyMip says:
drug markets onion darknet drug market
Bobb1Evinc says:
dark market onion darknet marketplace
DavidWhaft says:
dark market link drug markets dark web
Sirsmuct says:
darkmarket link dark0de link
DonnyCop says:
dark market deep web drug markets
Johnnot says:
drug markets dark web dark market 2021
PedroEvinc says:
drug markets dark web darkmarket 2021
Patrickevali says:
deep web drug store darknet drug store
TeddyMip says:
dark market url deep web drug links
JimLib says:
tor markets links tor market links
Patricktug says:
darknet drug links darknet marketplace
DiamondEvinc says:
dark market onion tor markets 2022
Ashleybar says:
tor markets links darknet market links
DennyCop says:
darkmarket list dark web market links
Williamliacy says:
dark0de url bitcoin dark web
Rickvurse says:
darkmarket 2021 tor dark web
TimKal says:
darknet market links darknet market lists
Kellydum says:
dark market onion darknet market links
Sirsmuct says:
dark0de darknet market darknet drug market
FelixMip says:
dark web market links drug markets dark web
Josenot says:
drug markets onion drug markets onion
BobbyEvinc says:
tor market dark web market
LawrenceCop says:
darknet market lists darknet market list
LennyCop says:
darkmarket darkmarket
Diedraovers says:
dark web market links bitcoin dark web
Versusvurse says:
darkmarket link darknet market list
FelixMip says:
dark market 2022 drug markets dark web
Samuelnum says:
darknet markets darkmarket link
Anoldvurse says:
darknet market lists bitcoin dark web
DonnyCop says:
dark web sites dark web markets
Dylannot says:
dark web markets bitcoin dark web
JennyMip says:
dark web markets deep web drug links
Patrickevali says:
tor markets links tor market links
Bobb1Evinc says:
best darknet markets dark market
Dezzyvurse says:
darknet market links darknet markets
Sharylhilla says:
deep web drug url darknet markets
Johnnot says:
darkmarket 2021 deep web drug url
DavidWhaft says:
dark market onion dark web markets
DennyCop says:
best darknet markets deep web drug store
TeddyMip says:
deep web drug markets darknet markets
Ricconot says:
darknet markets dark market 2021
JimLib says:
dark market link tor market links
PedroEvinc says:
darknet market darkmarket 2021
Patricktug says:
tor markets 2021 tor marketplace
Williamliacy says:
dark web market darknet drug market
Rickvurse says:
darkmarket dark markets 2022
Sirsmuct says:
darkmarket list tor marketplace
LennyCop says:
tor marketplace drug markets dark web
LawrenceCop says:
dark market link tor dark web
Versusvurse says:
tor marketplace darknet market lists
TimKal says:
dark market onion dark markets 2022
Anoldvurse says:
darknet drug store deep web drug store
Diedraovers says:
deep web markets darkmarket list
Josenot says:
darknet marketplace darkmarket 2021
BobbyEvinc says:
deep web drug store dark markets 2022
DonnyCop says:
darkmarket link tor market url
Sharylhilla says:
tor markets links deep web markets
DennyCop says:
darkmarket 2022 deep web markets
Samuelnum says:
dark market link dark market list
FelixMip says:
darkmarket link dark market 2021
Dylannot says:
dark web market list darknet market list
JennyMip says:
tor dark web dark web markets
DavidWhaft says:
tor dark web darknet drug store
DonnyCop says:
darknet marketplace dark web markets
Ricconot says:
deep web drug url darknet markets
Bobb1Evinc says:
darkmarket list tor market url
Sirsmuct says:
tor marketplace dark market 2022
Williamliacy says:
deep web drug store darkmarket link
JimLib says:
darkmarket url darknet drug store
Rickvurse says:
dark market list tor marketplace
what is anglish? says:
I cannot thank you enough for the blog post.Really thank you! Will read on…
LennyCop says:
darkmarket 2021 tor market url
Patricktug says:
dark market 2022 tor dark web
Johnnot says:
dark markets 2022 darknet market links
TeddyMip says:
deep web drug links tor dark web
PedroEvinc says:
tor markets 2021 bitcoin dark web
Kellydum says:
darknet market list darkmarket
Anoldvurse says:
dark web market dark market onion
LawrenceCop says:
dark market 2021 dark market 2022
TimKal says:
dark market list tor marketplace
Versusvurse says:
darknet drug store darknet websites
BobbyEvinc says:
tor markets 2021 darknet market links
Josenot says:
darkmarket url deep web drug links
DennyCop says:
tor market url darknet market lists
Samuelnum says:
dark web market deep web drug store
FelixMip says:
dark web drug marketplace deep web markets
Dezzyvurse says:
dark market url darknet market list
OzzyMip says:
darknet marketplace dark market link
JennyMip says:
drug markets dark web tor markets 2022
DonnyCop says:
darknet market links dark web market
Ricconot says:
dark market url deep web drug store
DavidWhaft says:
darkmarket 2021 darkode reborn link
Bobb1Evinc says:
tor market links dark web drug marketplace
JimLib says:
drug markets dark web dark web market list
DiamondEvinc says:
darkmarket darkmarket 2021
Rickvurse says:
darkmarket list darknet drug links
Sirsmuct says:
dark0de darknet market deep web drug url
LennyCop says:
tor market dark markets 2022
Williamliacy says:
darknet drug market darkmarket
Patricktug says:
dark market url dark market onion
Tommie Neubert says:
I’ve recently started a web site, the information you provide on this web site has helped me greatly. Thank you for all of your time & work. “Quit worrying about your health. It’ll go away.” by Robert Orben.
Johnnot says:
darknet websites darkmarket 2021
Labkesehatan.blogspot.com says:
Thanks for sharing, this is a fantastic blog post.Really looking forward to read more.
TeddyMip says:
tor market bitcoin dark web
PedroEvinc says:
darknet drug market dark web market links
LawrenceCop says:
tor markets 2022 dark web market list
Anoldvurse says:
darknet market links darkmarket link
Patrickevali says:
dark market onion dark market onion
BobbyEvinc says:
dark web sites darknet market
Versusvurse says:
dark market link dark web sites
Ashleybar says:
deep web drug url darknet drug store
TimKal says:
darknet market list dark web link
DennyCop says:
darknet marketplace darknet market links
OzzyMip says:
darkmarket deep web drug url
Samuelnum says:
bitcoin dark web dark web market links
Josenot says:
darknet marketplace deep web drug markets
FelixMip says:
bitcoin dark web darkmarket list
see says:
Great blog you’ve got here.. Itís hard to find excellent writing like yours nowadays. I seriously appreciate people like you! Take care!!
Dezzyvurse says:
deep web markets darkmarket 2021
JennyMip says:
dark market url darknet drug links
DonnyCop says:
darkmarket url darknet drug links
DavidWhaft says:
dark market url dark markets 2022
Ricconot says:
darkmarket drug markets onion
Bobb1Evinc says:
deep web drug url darknet drug market
Sirsmuct says:
darknet marketplace dark market 2021
Rickvurse says:
deep web drug markets dark web sites
JimLib says:
darknet drug links dark web link
Patricktug says:
dark web market dark web markets
DiamondEvinc says:
darknet drug links dark market onion
LennyCop says:
darkmarket link darkmarket url
Johnnot says:
darknet market list deep web drug store
TeddyMip says:
darknet market lists tor marketplace
PedroEvinc says:
darknet market darknet markets
Sharylhilla says:
tor dark web bitcoin dark web
LawrenceCop says:
drug markets onion tor markets 2022
BobbyEvinc says:
dark market 2022 dark market 2022
Anoldvurse says:
tor market links dark web link
penis says:
This is one awesome article. Awesome.
Versusvurse says:
dark market deep web drug links
OzzyMip says:
tor market tor market links
Samuelnum says:
dark market onion deep web markets
DennyCop says:
dark web market list deep web drug store
Ashleybar says:
drug markets onion deep web drug store
Josenot says:
deep web drug markets deep web drug links
TimKal says:
dark web drug marketplace tor dark web
Sirsmuct says:
deep web drug markets darkode link
Williamliacy says:
darkode url darkmarket url
DavidWhaft says:
tor markets 2021 darknet websites
FelixMip says:
tor dark web deep web drug url
JennyMip says:
drug markets onion darkmarket 2022
DonnyCop says:
dark web market dark web sites
Kellydum says:
darknet drug links darkmarket 2021
Dezzyvurse says:
dark market dark web sites
Ricconot says:
tor market darkmarket 2021
Bobb1Evinc says:
tor market url deep web drug markets
Rickvurse says:
darkmarket link bitcoin dark web
Johnnot says:
dark market url darknet drug store
DiamondEvinc says:
tor marketplace best darknet markets
TeddyMip says:
darknet market links darkmarket 2022
LennyCop says:
tor market links darkmarket link
PedroEvinc says:
darknet drug market darknet market list
OzzyMip says:
dark web market links deep web markets
Sharylhilla says:
dark market link darkmarket list
LawrenceCop says:
dark market 2022 darknet markets
Patrickevali says:
darkmarket darknet markets
Diedraovers says:
tor market links dark market onion
Samuelnum says:
drug markets dark web tor markets links
Versusvurse says:
dark web market list drug markets onion
bandar togel terbaik dan terbesar 2021 says:
Appreciate you sharing, great blog.Really looking forward to read more. Awesome.
Anoldvurse says:
dark web sites dark market url
Ashleybar says:
darkmarket 2022 tor markets 2022
Patricktug says:
dark market url drug markets dark web
Josenot says:
darkmarket 2021 tor markets links
TimKal says:
best darknet markets darknet market
JennyMip says:
tor market tor market url
DonnyCop says:
tor markets links dark web market list
Ricconot says:
darknet market list tor dark web
FelixMip says:
darkmarket link darkmarket 2021
Bobb1Evinc says:
dark market link dark markets 2022
Dezzyvurse says:
darknet market lists dark market onion
Rickvurse says:
darknet drug market darkmarket list
Johnnot says:
dark markets 2022 drug markets onion
DiamondEvinc says:
darknet drug store tor dark web
PedroEvinc says:
deep web drug url dark web link
LennyCop says:
dark web market list dark market link
DavidWhaft says:
darkmarket 2022 drug markets onion
OzzyMip says:
darknet market links darknet drug store
LawrenceCop says:
dark market url darkmarket link
BobbyEvinc says:
darknet market links tor markets links
Versusvurse says:
darknet market links darknet market list
Patrickevali says:
darknet marketplace best darknet markets
Diedraovers says:
tor market url deep web drug markets
JimLib says:
darknet market deep web drug store
DennyCop says:
darknet market darkmarket link
Anoldvurse says:
deep web drug links dark market url
Ashleybar says:
dark web link dark web market
Josenot says:
bitcoin dark web dark market link
DonnyCop says:
darkmarket link tor markets 2021
JennyMip says:
dark web market tor markets links
Ricconot says:
tor markets 2021 darkmarket 2022
Bobb1Evinc says:
dark market darkmarket link
TimKal says:
dark web sites deep web drug markets
FelixMip says:
tor markets 2021 dark web market list
Johnnot says:
darknet markets dark market 2022
Dezzyvurse says:
dark market 2022 darknet market links
Rickvurse says:
dark markets 2022 tor markets 2021
Sirsmuct says:
dark web drug marketplace darknet market lists
DavidWhaft says:
tor markets 2022 dark market link
OzzyMip says:
darknet drug market darkmarket list
Williamliacy says:
tor markets links tor marketplace
DiamondEvinc says:
best darknet markets darkmarket 2021
Sharylhilla says:
tor marketplace best darknet markets
LennyCop says:
darkmarket link tor market links
Kellydum says:
darknet market tor market
BobbyEvinc says:
darknet markets dark market 2022
LawrenceCop says:
dark web market links darknet market links
Versusvurse says:
darkmarket url darkmarket link
Patrickevali says:
darkmarket url dark market link
Diedraovers says:
tor markets 2021 dark market list
DennyCop says:
tor market url dark web market list
2dadsbouncehouses.com/category/water_slides says:
It’s nearly impossible to find experienced people about this subject, but you sound like you know what you’re talking about! Thanks
Johnnot says:
dark market url dark market list
Josenot says:
tor markets links deep web drug links
Ashleybar says:
darknet market links darknet websites
TeddyMip says:
dark web link darknet websites
Anoldvurse says:
drug markets onion tor dark web
JennyMip says:
dark market url dark web drug marketplace
Ricconot says:
drug markets onion dark market 2022
Bobb1Evinc says:
darkmarket list dark web markets
TimKal says:
dark web link dark market
FelixMip says:
drug markets dark web dark web drug marketplace
Rickvurse says:
deep web drug links dark web link
Dezzyvurse says:
tor market url dark market list
Dylannot says:
dark web market links dark web link
Williamliacy says:
dark web market links drug markets onion
Sharylhilla says:
tor markets links darknet drug store
Kellydum says:
deep web markets dark markets 2022
DiamondEvinc says:
darknet drug market dark web market links
PedroEvinc says:
darkmarket list dark market onion
LennyCop says:
tor markets 2021 dark market list
BobbyEvinc says:
darkmarket darkmarket url
Versusvurse says:
dark market 2022 darkmarket link
LawrenceCop says:
darkmarket list dark web markets
DavidWhaft says:
dark web markets deep web markets
Patrickevali says:
dark web link darknet websites
DennyCop says:
dark market onion dark market onion
Diedraovers says:
dark market 2021 darknet websites
Johnnot says:
darkmarket url darknet market links
TeddyMip says:
darkmarket link dark market
JennyMip says:
deep web drug url darkmarket url
Josenot says:
tor markets 2022 darknet marketplace
Ashleybar says:
tor markets 2021 dark web sites
Ricconot says:
dark market 2022 darknet market list
Bobb1Evinc says:
darkmarket 2021 darkmarket link
Anoldvurse says:
deep web drug store tor markets 2021
TimKal says:
dark market link dark web link
FelixMip says:
darknet market list darkmarket 2022
OzzyMip says:
tor market url deep web markets
JimLib says:
dark web market links darkmarket
Williamliacy says:
dark web sites https://darkoderebornlink.com/ – darkmarket 2021
Dezzyvurse says:
deep web drug markets tor market url
DiamondEvinc says:
darknet drug store https://worldmarketsdarknet.com/ – dark web sites
PedroEvinc says:
bitcoin dark web https://monopolymarketlinks.com/ – deep web drug markets
BobbyEvinc says:
darknet market https://torrezmarketdarknet.com/ – dark market 2021
LennyCop says:
dark web drug marketplace https://heinekenexpresonion.com/ – dark web market list
LawrenceCop says:
dark web market list https://mymonopolymarket.com/ – dark web sites
DavidWhaft says:
dark web markets https://darkoderebornurl.com/ – dark market onion
Versusvurse says:
deep web drug url https://worldonionmarketplace.com/ – darkmarket 2022
Patrickevali says:
deep web drug markets https://tortorrezmarket.com/ – darkmarket list
DennyCop says:
tor markets 2022 https://darkoderebornurl.com/ – dark web market
Diedraovers says:
drug markets onion https://torrezmarketonion.com/ – deep web drug links
Johnnot says:
tor market links https://cannahomemarket24.com/ – darknet drug links
DonnyCop says:
darkmarket link https://versusdarkmarkets.com/ – deep web drug url
Williamliacy says:
tor market url https://darkoderebornlink.com/ – darkode reborn link
Dylannot says:
dark web sites https://versus-markets.com/ – bitcoin dark web
TimKal says:
dark web market list https://heinekenexpresmarket.com/ – deep web drug markets
Ashleybar says:
tor marketplace https://torrezmarketlinkwww.com/ – tor market
JennyMip says:
darknet market lists https://torrez-market-onion.com/ – tor markets 2022
JimLib says:
darknet markets https://heinekenexpresonion.com/ – darknet drug links
Ricconot says:
tor markets 2021 https://torrezlinkonion.com/ – darkmarket 2022
TeddyMip says:
darknet drug links https://cannahomeurl.com/ – darkmarket
Josenot says:
best darknet markets https://monopoly-market-onion.com/ – bitcoin dark web
Rickvurse says:
drug markets onion https://heinekenmarket.com/ – dark market
Sharylhilla says:
deep web markets https://torrezlinkonion.com/ – dark web markets
Dezzyvurse says:
deep web markets https://darkoderebornonion.com/ – tor markets 2022
Anoldvurse says:
tor market url https://monopolymarketwww.com/ – deep web drug url
FelixMip says:
darknet marketplace https://mymonopolymarket.com/ – tor market links
DiamondEvinc says:
deep web drug url https://worldmarketlinktor.com/ – darkmarket
Tattoo Artists says:
Truly all kinds of beneficial advice.graphic organizers for writing an essay help writing thesis statement best cv writing service in dubai
LennyCop says:
darknet markets https://torrez-onion.com/ – darkmarket 2022
LawrenceCop says:
dark market list https://mymonopolymarket.com/ – bitcoin dark web
DavidWhaft says:
dark0de link https://darkoderebornurl.com/ – dark web market
PedroEvinc says:
darknet market https://monopolymarketlinks.com/ – deep web drug links
Kellydum says:
darknet marketplace https://heinekenmarket.com/ – dark web drug marketplace
BobbyEvinc says:
darkmarket url https://torrezmarketonion.com/ – darknet market
Sirsmuct says:
darkode link https://darkoderebornmarkets.com/ – dark web drug marketplace
DennyCop says:
darknet marketplace https://darkoderebornurl.com/ – dark web market links
Patrickevali says:
tor market links https://tortorrezmarket.com/ – dark market onion
Diedraovers says:
darknet marketplace https://torrezmarketdarknet.com/ – dark web market
Samuelnum says:
darkode market https://darkoderebornonion.com/ – dark market 2022
TimKal says:
tor markets 2022 https://heinekenexpresmarket.com/ – dark markets 2022
Williamliacy says:
tor markets links https://darkoderebornlink.com/ – dark web market links
DonnyCop says:
dark market link https://versus-dark-market.com/ – dark market 2021
Bobb1Evinc says:
darknet drug links https://asap-market.com/ – darkmarket url
Dylannot says:
best darknet markets https://versus-markets.com/ – darknet drug links
Ashleybar says:
deep web drug store https://torrezmarketlinkwww.com/ – deep web drug links
Rickvurse says:
darknet market lists https://asapmarket-onion.com/ – tor market links
Anoldvurse says:
tor market url https://monopolymarketwww.com/ – dark web drug marketplace
Johnnot says:
dark web market https://caanahome-market-onion.com/ – dark web link
JimLib says:
tor markets 2021 https://heinekenexpresonion.com/ – dark web market
TeddyMip says:
drug markets dark web https://cannahomelink.com/ – darknet market lists
Josenot says:
darknet market https://monopoly-market-onion.com/ – dark markets 2022
JennyMip says:
tor market links https://torrez-market-linkss.com/ – bitcoin dark web
Ricconot says:
darknet market https://torrezlinkonion.com/ – drug markets dark web
BobbyEvinc says:
darkmarket link https://torrezmarketurls.com/ – dark market url
DiamondEvinc says:
dark web market links https://worldmarketsdarknet.com/ – darkmarket link
DavidWhaft says:
tor market links https://darkoderebornurl.com/ – dark0de url
Dezzyvurse says:
tor market url https://tortorrezmarket.com/ – tor marketplace
FelixMip says:
tor markets 2022 https://monopolymarketonline.com/ – dark market 2021
LennyCop says:
tor dark web https://torrez-onion.com/ – drug markets dark web
Sirsmuct says:
darknet market list https://darkoderebornmarkets.com/ – deep web drug store
马来西亚美食家 says:
Major thanks for the blog article.Really thank you! Cool.
Patrickevali says:
dark web drug marketplace https://tortorrezmarket.com/ – darknet market links
DennyCop says:
deep web drug markets https://darkoderebornlink.com/ – dark web markets
PedroEvinc says:
dark web sites https://monopoly-market-onion.com/ – deep web drug markets
LawrenceCop says:
tor market url https://mymonopolymarket.com/ – darknet drug market
Patricktug says:
dark market 2021 https://heinekenexpresshop.com/ – deep web drug links
Diedraovers says:
dark web market https://torrezmarketdarknet.com/ – darkmarket
Williamliacy says:
darkmarket link https://darkoderebornlink.com/ – dark0de market
TimKal says:
bitcoin dark web https://heinekenexpresmarket.com/ – dark market onion
Versusvurse says:
drug markets dark web https://worldmarketsonion.com/ – dark markets 2022
Kellydum says:
dark market https://heinekenmarket.com/ – dark markets 2022
Bobb1Evinc says:
darknet drug market https://asap-market-onion.com/ – darknet market links
DonnyCop says:
dark web market https://versusdarkmarkets.com/ – dark market link
view says:
I need to to thank you for this good read!! I absolutely enjoyed every little bit of it. I’ve got you bookmarked to look at new things you postÖ
DennyCop says:
tor markets links https://darkoderebornurl.com/ – darknet market links
Anoldvurse says:
deep web drug url https://monopolymarketwww.com/ – dark market list
Rickvurse says:
darknet market links https://asapmarket-onion.com/ – dark web drug marketplace
OzzyMip says:
darknet drug store https://versus-market-onion.com/ – dark web market links
JimLib says:
tor dark web https://heinekenexpresonion.com/ – darknet websites
Sirsmuct says:
darknet drug store https://darkoderebornmarkets.com/ – darknet market links
LennyCop says:
darkmarket https://torrez-onion.com/ – darknet market list
Dezzyvurse says:
dark market 2021 https://darkoderebornonion.com/ – darknet market
DavidWhaft says:
darkmarket 2021 https://darkoderebornurl.com/ – dark0de darknet market
Johnnot says:
dark markets 2022 https://cannahomedarkmarket.com/ – dark market url
mvno esim says:
Major thankies for the article post.Thanks Again. Fantastic.
Josenot says:
darkmarket 2021 https://heineken.express/ – dark web link
DiamondEvinc says:
dark market link https://worldmarketlinktor.com/ – dark market 2021
TeddyMip says:
dark market link https://cannahome-markets.com/ – dark web market links
JennyMip says:
darknet market lists https://torrez-market-linkss.com/ – dark web market links
Ricconot says:
dark markets 2022 https://oniontorrezurl.com/ – tor markets links
BobbyEvinc says:
darkmarket link https://torrezmarketurls.com/ – darkmarket
Patrickevali says:
tor marketplace https://tortorrezmarket.com/ – darkmarket list
FelixMip says:
dark market onion https://monopolymarketonline.com/ – darknet markets
Samuelnum says:
dark market list https://darkoderebornonion.com/ – darknet markets
LawrenceCop says:
dark market onion https://monopolymarketonline.com/ – dark market 2021
Diedraovers says:
darkmarket 2021 https://torrezmarketonion.com/ – darknet market list
TimKal says:
deep web drug links https://heinekenexpresmarket.com/ – deep web drug markets
Sharylhilla says:
darkmarket link https://oniontorrezurl.com/ – dark market
DennyCop says:
deep web drug url https://darkoderebornlink.com/ – dark web market
Rickvurse says:
drug markets dark web https://heinekenmarket.com/ – tor market url
DonnyCop says:
tor market https://versusdarkmarkets.com/ – darkmarket list
Versusvurse says:
tor market url https://versusprojectmarket.com/ – deep web drug url
Bobb1Evinc says:
deep web markets https://asapmarketonion.com/ – dark market link
PedroEvinc says:
dark market https://monopoly-market-onion.com/ – drug markets dark web
Patricktug says:
darkmarket link https://heinekenexpresshop.com/ – deep web drug store
Williamliacy says:
darkmarket 2021 https://darkoderebornlink.com/ – deep web drug url
Anoldvurse says:
dark market https://monopolymarketurls.com/ – darknet drug links
DavidWhaft says:
dark web drug marketplace https://darkoderebornurl.com/ – darkmarket list
JimLib says:
drug markets dark web https://heinekenexpresonion.com/ – darknet market list
Kellydum says:
darknet drug market https://heinekenmarket.com/ – dark market list
Sirsmuct says:
dark web drug marketplace https://darkoderebornmarkets.com/ – deep web drug url
Dezzyvurse says:
dark web market list https://tortorrezmarket.com/ – dark web market links
Johnnot says:
dark web market list https://cannahomedarkmarket.com/ – deep web drug url
Dylannot says:
tor market url https://asapmarketlinks.com/ – deep web drug url
OzzyMip says:
tor market url https://versusdarkmarket.com/ – darknet markets
LennyCop says:
darkmarket url https://heinekenexpresmarket.com/ – dark market url
Patrickevali says:
darknet market https://torrezmarketwww.com/ – darkmarket link
Diedraovers says:
darknet drug store https://torrezmarketdarknet.com/ – drug markets dark web
JennyMip says:
dark web market links https://torrez-market-linkss.com/ – darknet drug store
DiamondEvinc says:
dark web market list https://worldmarketurltor.com/ – drug markets dark web
Ricconot says:
darkmarket 2022 https://oniontorrezurl.com/ – tor market url
BobbyEvinc says:
dark web link https://torrezmarketurls.com/ – darkmarket url
LawrenceCop says:
darkmarket url https://mymonopolymarket.com/ – drug markets dark web
TeddyMip says:
deep web drug store https://cannahome-markets.com/ – deep web drug links
TimKal says:
dark market url https://heinekenexpresmarket.com/ – dark market onion
DennyCop says:
tor market url https://darkoderebornmarkets.com/ – deep web drug markets
Josenot says:
dark web markets https://heineken.express/ – dark market list
Samuelnum says:
dark market link https://darkoderebornonion.com/ – darkode url
Rickvurse says:
bitcoin dark web https://asapmarket-onion.com/ – darkmarket
Versusvurse says:
dark market url https://worldonionmarketplace.com/ – dark web market list
FelixMip says:
dark market url https://monopolymarketlinks.com/ – dark web link
DonnyCop says:
dark web link https://versusdarknetmarket.com/ – dark web market links
Anoldvurse says:
deep web markets https://monopolymarketurls.com/ – darknet market links
PedroEvinc says:
drug markets dark web https://monopolymarketlinks.com/ – dark web market list
Sirsmuct says:
darkmarket link https://darkoderebornmarkets.com/ – darkmarket link
Bobb1Evinc says:
darknet drug market https://asap-market.com/ – tor markets links
Patricktug says:
darknet market https://heinekenexpresshop.com/ – tor markets 2022
DavidWhaft says:
darknet drug links https://darkoderebornurl.com/ – deep web drug links
Patrickevali says:
dark web drug marketplace https://torrezmarketwww.com/ – tor market
JimLib says:
darkmarket url https://heinekenexpresonion.com/ – dark market link
Williamliacy says:
drug markets onion https://darkoderebornlink.com/ – darkmarket
LennyCop says:
tor markets 2021 https://heinekenexpresonion.com/ – dark market url
Ashleybar says:
tor dark web https://torrezmarketurls.com/ – dark market url
Dezzyvurse says:
darknet market lists https://torrezmarketwww.com/ – drug markets onion
Kellydum says:
darknet drug store https://heinekenmarket.com/ – darkmarket list
Johnnot says:
darknet market https://cannahomedarkmarket.com/ – darkmarket list
Dylannot says:
dark market 2022 https://asapmarketlinks.com/ – darkmarket url
BobbyEvinc says:
deep web markets https://torrezmarketurls.com/ – deep web drug markets
TimKal says:
dark market 2022 https://heinekenexpresmarket.com/ – deep web drug url
LawrenceCop says:
tor marketplace https://mymonopolymarket.com/ – darknet drug links
Versusvurse says:
darknet marketplace https://worldonionmarketplace.com/ – dark web market
JennyMip says:
darkmarket url https://torrez-market-linkss.com/ – tor markets 2022
Rickvurse says:
darknet drug market https://heinekenmarket.com/ – darkmarket 2022
DennyCop says:
deep web drug markets https://darkoderebornlink.com/ – tor market
Ricconot says:
deep web drug store https://torrezlinkonion.com/ – darknet market links
DiamondEvinc says:
darkmarket 2022 https://worldmarketlinktor.com/ – best darknet markets
TeddyMip says:
darknet market lists https://cannahomelink.com/ – tor dark web
Samuelnum says:
dark web market links https://darkoderebornonion.com/ – darknet drug market
DonnyCop says:
dark market list https://versusdarkmarkets.com/ – dark markets 2022
Sirsmuct says:
dark web markets [url=https://darkoderebornmarkets.com/ ]tor markets 2021 [/url]
Josenot says:
darknet market links https://monopoly-market-onion.com/ – darknet market
Diedraovers says:
best darknet markets https://torrezmarketonion.com/ – tor market url
child mental health says:
Precisely what a man of power! You have the potential to create good factors that you can’t get anyplace. to envy
PedroEvinc says:
tor markets 2022 https://monopolymarketlinks.com/ – darknet market
Williamliacy says:
tor markets links https://darkoderebornlink.com/ – darkmarket url
Patrickevali says:
deep web markets https://torrezmarketwww.com/ – dark web markets
DavidWhaft says:
darkmarket url https://darkoderebornurl.com/ – darkmarket 2021
JimLib says:
darkmarket https://heinekenexpresonion.com/ – dark markets 2022
Anoldvurse says:
tor dark web https://monopolymarketurls.com/ – darknet market lists
Bobb1Evinc says:
tor market https://asap-market-onion.com/ – dark web markets
Patricktug says:
darkmarket 2021 https://heinekenexpresshop.com/ – dark web markets
Ashleybar says:
darknet drug market https://torrezmarketlinkwww.com/ – darknet markets
FelixMip says:
darknet drug market https://monopolymarketlinks.com/ – darknet drug market
LennyCop says:
darknet market https://heinekenexpresmarket.com/ – dark web link
Dezzyvurse says:
tor market url https://darkoderebornonion.com/ – tor dark web
Johnnot says:
dark web drug marketplace https://cannahomemarket24.com/ – darkmarket url
disinfection services malaysia says:
WOW just what I was looking for. Came here by searching for 2000 takipçisatın al
BobbyEvinc says:
deep web markets https://torrezmarketdarknet.com/ – tor market url
Kellydum says:
darknet markets https://heinekenmarket.com/ – dark web link
case packing says:
Thanks again for the post.Thanks Again. Awesome.
TimKal says:
darkmarket 2022 https://heinekenexpresmarket.com/ – dark web drug marketplace
OzzyMip says:
darknet market links https://versus-market-onion.com/ – darknet markets
LawrenceCop says:
darknet drug store https://monopolymarketonline.com/ – drug markets onion
Versusvurse says:
tor market https://versusprojectmarket.com/ – dark market 2022
Rickvurse says:
dark markets 2022 https://heinekenexpresshop.com/ – tor market
DennyCop says:
dark markets 2022 https://darkoderebornlink.com/ – dark market 2021
DiamondEvinc says:
dark market link https://worldmarketlinktor.com/ – dark web drug marketplace
Sirsmuct says:
bitcoin dark web https://darkoderebornmarkets.com/ – dark0de link
JennyMip says:
dark web markets https://torrez-market-linkss.com/ – darkmarket list
Ricconot says:
deep web drug url https://torrezmarketlinkwww.com/ – dark market onion
Diedraovers says:
deep web drug store https://torrezmarketdarknet.com/ – dark markets 2022
Samuelnum says:
dark markets 2022 https://darkoderebornonion.com/ – dark market link
DavidWhaft says:
deep web drug url https://darkoderebornurl.com/ – darknet drug market
DonnyCop says:
tor market https://versus-dark-market.com/ – darknet market list
Williamliacy says:
dark0de darknet market https://darkoderebornlink.com/ – deep web drug store
Patrickevali says:
dark web markets https://torrezmarketwww.com/ – darknet market list
LennyCop says:
dark web markets https://torrez-onion.com/ – dark web market list
Josenot says:
dark web market links https://monopoly-market-onion.com/ – darkmarket url
Ashleybar says:
dark market onion https://torrezmarketurls.com/ – tor dark web
PedroEvinc says:
darknet drug links https://monopolymarketlinks.com/ – dark market list
Anoldvurse says:
dark web market links https://monopolymarketwww.com/ – dark market onion
Dezzyvurse says:
darknet marketplace https://darkoderebornonion.com/ – dark market 2022
TimKal says:
deep web drug markets https://heinekenexpresmarket.com/ – bitcoin dark web
JimLib says:
tor marketplace https://heinekenexpresonion.com/ – dark web sites
hum news live says:
Thanks for sharing, this is a fantastic article. Want more.
Patricktug says:
deep web drug url https://heinekenexpresshop.com/ – dark web market links
LawrenceCop says:
darkmarket url https://monopolymarketonline.com/ – tor market
BobbyEvinc says:
dark market 2021 https://torrezmarketurls.com/ – darknet drug store
DiamondEvinc says:
darknet market lists https://worldmarketsdarknet.com/ – dark web link
OzzyMip says:
darknet markets https://versusdarkmarket.com/ – darkmarket
DennyCop says:
dark web drug marketplace https://darkoderebornmarkets.com/ – darkmarket 2021
Sirsmuct says:
tor marketplace https://darkoderebornmarkets.com/ – tor dark web
Johnnot says:
deep web drug links https://cannahomemarket24.com/ – tor market url
Versusvurse says:
drug markets dark web https://worldonionmarketplace.com/ – tor dark web
Rickvurse says:
darknet drug market https://heinekenexpresshop.com/ – darknet market
Kellydum says:
deep web drug store https://heinekenmarket.com/ – darknet market lists
Samuelnum says:
darkmarket url https://darkoderebornonion.com/ – dark0de link
DavidWhaft says:
darknet markets https://darkoderebornurl.com/ – darknet websites
JennyMip says:
deep web drug store https://torrez-market-linkss.com/ – dark market onion
Ricconot says:
deep web drug store https://torrezlinkonion.com/ – dark web market links
LennyCop says:
dark market 2021 https://heinekenexpresonion.com/ – tor markets 2021
Patrickevali says:
deep web markets https://tortorrezmarket.com/ – darkmarket 2021
TimKal says:
dark market link https://heinekenexpresmarket.com/ – dark market onion
TeddyMip says:
tor markets links https://cannahomeurl.com/ – dark market url
DonnyCop says:
deep web drug markets https://versusdarkmarkets.com/ – tor market links
Williamliacy says:
dark web drug marketplace https://darkoderebornlink.com/ – darkmarket 2022
Dezzyvurse says:
darknet market lists https://darkoderebornonion.com/ – darknet market links
Ashleybar says:
darknet market https://torrezmarketlinkwww.com/ – darkmarket 2022
LawrenceCop says:
drug markets dark web https://mymonopolymarket.com/ – deep web drug store
Anoldvurse says:
tor market url https://monopolymarketwww.com/ – deep web drug markets
JimLib says:
darkmarket list https://heinekenexpresonion.com/ – dark market onion
Josenot says:
darknet drug store https://heineken.express/ – darkmarket url
PedroEvinc says:
darknet drug store https://monopolymarketlinks.com/ – dark web market
Bobb1Evinc says:
darknet market https://asapmarketonion.com/ – deep web drug markets
Sirsmuct says:
dark web link https://darkoderebornmarkets.com/ – darknet drug market
Patricktug says:
tor dark web https://heinekenexpresshop.com/ – best darknet markets
Sharylhilla says:
dark market 2022 https://oniontorrezurl.com/ – tor market
Versusvurse says:
darknet markets https://worldonionmarketplace.com/ – darknet drug market
DiamondEvinc says:
dark web markets https://worldmarketlinktor.com/ – tor market url
BobbyEvinc says:
dark web drug marketplace https://torrezmarketonion.com/ – tor markets 2022
DennyCop says:
dark market list https://darkoderebornmarkets.com/ – tor marketplace
FelixMip says:
dark web markets https://monopolymarketurls.com/ – dark market list
LennyCop says:
tor market https://heinekenexpresmarket.com/ – dark market onion
Johnnot says:
darkmarket list https://caanahome-market-onion.com/ – darknet marketplace
Rickvurse says:
tor markets 2022 https://heinekenexpresshop.com/ – dark market list
DavidWhaft says:
darkode link https://darkoderebornurl.com/ – darkmarket list
Dylannot says:
darknet market lists https://asapmarketurls.com/ – darknet drug market
Samuelnum says:
dark web drug marketplace https://darkoderebornonion.com/ – tor dark web
Kellydum says:
dark market url https://heinekenmarket.com/ – tor markets 2021
Patrickevali says:
tor market https://torrezmarketwww.com/ – darknet market
Williamliacy says:
dark market url https://darkoderebornlink.com/ – dark0de darknet market
TeddyMip says:
tor marketplace https://cannahomeurl.com/ – darkmarket 2021
Dezzyvurse says:
dark market 2022 https://darkoderebornonion.com/ – dark market 2022
DonnyCop says:
darknet market links https://versusdarkmarkets.com/ – darknet market list
judi togel online says:
I appreciate you sharing this article post.Thanks Again. Will read on…
JennyMip says:
darknet markets https://torrez-market-onion.com/ – deep web markets
Ashleybar says:
tor markets links https://torrezmarketlinkwww.com/ – dark web link
Ricconot says:
dark market 2022 https://torrezlinkonion.com/ – darknet market list
t-shirt printing malaysia says:
I do agree with all the ideas you’ve offered on your post. They are really convincing and will definitely work. Still, the posts are very quick for newbies. May just you please lengthen them a bit from subsequent time? Thanks for the post.
TimKal says:
tor marketplace https://heinekenexpresmarket.com/ – darknet websites
JimLib says:
dark markets 2022 https://heinekenexpresonion.com/ – dark web markets
LawrenceCop says:
bitcoin dark web https://mymonopolymarket.com/ – dark web market links
Anoldvurse says:
darknet market https://monopolymarketurls.com/ – dark web drug marketplace
Diedraovers says:
darknet drug links https://torrezmarketdarknet.com/ – tor dark web
DennyCop says:
darknet market lists https://darkoderebornmarkets.com/ – dark market link
Sirsmuct says:
dark0de url https://darkoderebornmarkets.com/ – dark web market links
DiamondEvinc says:
tor market https://worldmarketsdarknet.com/ – tor marketplace
Sharylhilla says:
darkmarket https://torrezlinkonion.com/ – dark markets 2022
?? ?? ???? says:
İnstagram takipçi satın al, hesabının etkileşimini ve gösterimini takipçi satın alarak yükselt.
Rickvurse says:
dark market url https://asapmarket-onion.com/ – deep web drug store
Versusvurse says:
darknet market lists https://versusprojectmarket.com/ – dark web markets
Patricktug says:
dark web market links https://heinekenexpresshop.com/ – drug markets onion
LennyCop says:
dark web market https://heinekenexpresonion.com/ – best darknet markets
Josenot says:
darknet markets https://monopoly-market-onion.com/ – dark web market links
PedroEvinc says:
dark markets 2022 https://monopoly-market-onion.com/ – darknet markets
Williamliacy says:
darkmarket 2022 https://darkoderebornlink.com/ – darkode reborn link
Bobb1Evinc says:
dark market list https://asapmarketonion.com/ – drug markets onion
BobbyEvinc says:
dark market list https://torrezmarketdarknet.com/ – dark web drug marketplace
FelixMip says:
darknet drug links https://heineken.express/ – deep web markets
DavidWhaft says:
darknet marketplace https://darkoderebornurl.com/ – darkmarket list
Johnnot says:
tor market https://cannahomemarket24.com/ – deep web drug markets
Patrickevali says:
darknet market list https://tortorrezmarket.com/ – dark market onion
Samuelnum says:
dark0de darknet market https://darkoderebornonion.com/ – drug markets dark web
DonnyCop says:
dark market https://versus-dark-market.com/ – darknet websites
Dezzyvurse says:
darknet market https://tortorrezmarket.com/ – darknet market
OzzyMip says:
deep web drug store https://versus-market-onion.com/ – deep web drug links
TimKal says:
darknet market lists https://heinekenexpresmarket.com/ – darkmarket link
LawrenceCop says:
bitcoin dark web https://mymonopolymarket.com/ – bitcoin dark web
Ashleybar says:
dark web link https://torrezmarketlinkwww.com/ – tor market links
JimLib says:
darknet drug links https://heinekenexpresonion.com/ – best darknet markets
Kellydum says:
deep web drug store https://heinekenmarket.com/ – darkmarket
JennyMip says:
darknet drug store https://torrez-market-onion.com/ – dark web markets
Ricconot says:
darkmarket url https://oniontorrezurl.com/ – deep web drug markets
Sirsmuct says:
deep web drug markets https://darkoderebornmarkets.com/ – darkode market
DennyCop says:
darknet markets https://darkoderebornurl.com/ – best darknet markets
Anoldvurse says:
dark web link https://monopolymarketurls.com/ – darknet drug store
Rickvurse says:
tor marketplace https://heinekenmarket.com/ – darknet drug store
Sharylhilla says:
deep web markets https://torrezlinkonion.com/ – tor dark web
Versusvurse says:
dark web market links https://worldmarketsonion.com/ – darknet websites
DiamondEvinc says:
deep web drug url https://worldmarketsdarknet.com/ – dark market list
LennyCop says:
tor market https://torrez-onion.com/ – tor dark web
Patricktug says:
darkmarket 2021 https://heinekenexpresshop.com/ – darknet websites
Williamliacy says:
darkmarket 2021 https://darkoderebornlink.com/ – bitcoin dark web
DavidWhaft says:
darknet drug market https://darkoderebornurl.com/ – deep web drug url
Josenot says:
dark markets 2022 https://heineken.express/ – darknet market list
PedroEvinc says:
drug markets onion https://monopolymarketlinks.com/ – tor markets 2022
Patrickevali says:
deep web markets https://torrezmarketwww.com/ – tor market
Samuelnum says:
dark0de darknet market https://darkoderebornonion.com/ – darknet drug market
Bobb1Evinc says:
dark market link https://asap-market.com/ – best darknet markets
TimKal says:
dark market https://heinekenexpresmarket.com/ – drug markets onion
Johnnot says:
darkmarket link https://cannahomedarkmarket.com/ – darkmarket 2022
BobbyEvinc says:
dark market 2021 https://torrezmarketurls.com/ – dark web sites
LawrenceCop says:
darknet markets https://monopolymarketonline.com/ – tor marketplace
FelixMip says:
dark web drug marketplace https://monopoly-market-onion.com/ – darkmarket 2021
OzzyMip says:
darkmarket 2022 https://versusdarkmarket.com/ – darknet drug market
Dezzyvurse says:
dark market https://darkoderebornonion.com/ – dark market url
DonnyCop says:
darkmarket list https://versusdarkmarkets.com/ – darknet market list
Ashleybar says:
dark web market https://torrezmarketlinkwww.com/ – darknet marketplace
Diedraovers says:
darknet markets https://torrezmarketdarknet.com/ – darknet market
DennyCop says:
dark markets 2022 https://darkoderebornlink.com/ – drug markets dark web
TeddyMip says:
darkmarket 2022 https://cannahomeurl.com/ – darknet drug market
Sirsmuct says:
drug markets onion https://darkoderebornmarkets.com/ – dark market onion
JennyMip says:
darknet marketplace https://torrez-market-linkss.com/ – darkmarket 2021
JimLib says:
dark web drug marketplace https://heinekenexpresonion.com/ – darknet websites
Ricconot says:
darknet market links https://torrezlinkonion.com/ – dark market 2021
Sharylhilla says:
tor markets 2022 https://oniontorrezurl.com/ – dark market 2021
Rickvurse says:
dark web drug marketplace https://heinekenmarket.com/ – dark market onion
Versusvurse says:
darkmarket https://versusprojectmarket.com/ – darknet marketplace
LennyCop says:
darkmarket link https://heinekenexpresmarket.com/ – tor market
Anoldvurse says:
darkmarket 2021 https://monopolymarketwww.com/ – dark web market links
DiamondEvinc says:
darknet drug links https://worldmarketsdarknet.com/ – drug markets dark web
TimKal says:
dark market 2021 https://heinekenexpresmarket.com/ – best darknet markets
DavidWhaft says:
tor market https://darkoderebornurl.com/ – darknet market
Patrickevali says:
darknet markets https://tortorrezmarket.com/ – tor marketplace
Williamliacy says:
deep web drug store https://darkoderebornlink.com/ – deep web drug links
LawrenceCop says:
darknet drug store https://monopolymarketonline.com/ – darknet websites
PedroEvinc says:
dark web drug marketplace https://monopoly-market-onion.com/ – tor market url
Patricktug says:
darknet market [url=https://heinekenexpresshop.com/ ]tor market links [/url]
DonnyCop says:
bitcoin dark web https://versusdarkmarkets.com/ – tor dark web
Ashleybar says:
bitcoin dark web https://torrezmarketurls.com/ – deep web markets
Bobb1Evinc says:
darkmarket list https://asapmarketonion.com/ – bitcoin dark web
Dylannot says:
dark web sites https://asapmarketurls.com/ – dark web markets
Johnnot says:
deep web drug markets https://cannahomedarkmarket.com/ – darknet drug market
Dezzyvurse says:
deep web drug store https://tortorrezmarket.com/ – dark web link
DennyCop says:
darkmarket 2022 https://darkoderebornlink.com/ – deep web drug store
Sirsmuct says:
darknet market list https://darkoderebornmarkets.com/ – deep web drug url
FelixMip says:
darknet market links https://heineken.express/ – tor markets links
BobbyEvinc says:
tor market https://torrezmarketurls.com/ – deep web drug url
TeddyMip says:
dark web markets https://cannahome-markets.com/ – darknet drug store
Rickvurse says:
tor market https://asapmarket-onion.com/ – drug markets dark web
Sharylhilla says:
dark market 2021 https://oniontorrezurl.com/ – darkmarket
Kellydum says:
darknet websites https://heinekenmarket.com/ – darknet marketplace
JennyMip says:
dark market https://torrez-market-urls.com/ – dark markets 2022
LennyCop says:
dark market onion https://heinekenexpresonion.com/ – dark market
JimLib says:
dark market https://heinekenexpresonion.com/ – dark market link
Ricconot says:
dark market list https://torrezlinkonion.com/ – darknet market list
TimKal says:
dark market https://heinekenexpresmarket.com/ – tor markets 2021
DavidWhaft says:
deep web drug links https://darkoderebornurl.com/ – darknet market lists
Versusvurse says:
dark web link https://worldonionmarketplace.com/ – deep web markets
Anoldvurse says:
dark web sites https://monopolymarketurls.com/ – tor market
LawrenceCop says:
darkmarket 2021 https://monopolymarketonline.com/ – deep web drug links
DiamondEvinc says:
tor markets links https://worldmarketsdarknet.com/ – deep web drug store
Patrickevali says:
dark web market links https://tortorrezmarket.com/ – dark web market links
DonnyCop says:
darkmarket url https://versusdarknetmarket.com/ – tor markets 2022
Williamliacy says:
deep web drug links https://darkoderebornlink.com/ – dark web market
Ashleybar says:
best darknet markets https://torrezmarketurls.com/ – bitcoin dark web
DennyCop says:
darknet drug store https://darkoderebornlink.com/ – deep web markets
Samuelnum says:
dark market url https://darkoderebornonion.com/ – dark0de market
Sirsmuct says:
darkode url https://darkoderebornmarkets.com/ – darknet market list
Patricktug says:
dark market 2022 https://heinekenexpresshop.com/ – darknet marketplace
Bobb1Evinc says:
dark web sites https://asap-market.com/ – dark web drug marketplace
Johnnot says:
dark web market https://cannahomedarkmarket.com/ – darkmarket link
PedroEvinc says:
tor markets links https://monopolymarketlinks.com/ – dark web market
Josenot says:
darknet drug links https://monopoly-market-onion.com/ – tor market
Dezzyvurse says:
dark web sites https://darkoderebornonion.com/ – dark web link
BobbyEvinc says:
darkmarket list https://torrezmarketdarknet.com/ – deep web drug markets
LennyCop says:
deep web drug store https://torrez-onion.com/ – deep web markets
credit pentru pensionari says:
Wow, great article post.Really thank you! Want more.
Rickvurse says:
darknet markets https://heinekenmarket.com/ – dark market onion
Sharylhilla says:
dark web market links https://oniontorrezurl.com/ – drug markets dark web
TeddyMip says:
tor dark web https://cannahomeurl.com/ – tor market
TimKal says:
dark web link https://heinekenexpresmarket.com/ – dark web markets
JennyMip says:
dark web drug marketplace https://torrez-market-linkss.com/ – tor markets 2022
Ricconot says:
dark market list https://oniontorrezurl.com/ – darkmarket 2022
Kellydum says:
darknet drug links https://heinekenmarket.com/ – darknet markets
JimLib says:
tor market links https://heinekenexpresonion.com/ – deep web drug store
Versusvurse says:
tor market url https://worldmarketsonion.com/ – deep web drug links
DavidWhaft says:
dark web drug marketplace https://darkoderebornurl.com/ – darkmarket link
Patrickevali says:
darknet market links https://torrezmarketwww.com/ – tor market url
LawrenceCop says:
drug markets onion https://monopolymarketonline.com/ – darknet marketplace
Sirsmuct says:
dark market 2022 https://darkoderebornmarkets.com/ – dark0de market
DonnyCop says:
dark market 2021 https://versus-dark-market.com/ – dark web sites
Diedraovers says:
dark web link https://torrezmarketdarknet.com/ – bitcoin dark web
Anoldvurse says:
tor market https://monopolymarketurls.com/ – darknet market
Williamliacy says:
darknet websites https://darkoderebornlink.com/ – darknet market
Bobb1Evinc says:
darknet market list https://asapmarketonion.com/ – darknet market lists
Ashleybar says:
darknet market links https://torrezmarketurls.com/ – dark web market links
DennyCop says:
dark web link https://darkoderebornurl.com/ – deep web drug links
DiamondEvinc says:
dark web markets https://worldmarketurltor.com/ – darknet market list
Dezzyvurse says:
darkmarket https://torrezmarketwww.com/ – bitcoin dark web
CVV Dumps says:
FRESHCC.RU – We have a online store for selling Fresh CCs All Country. Our store is full automatic and high speed
LennyCop says:
darknet markets https://heinekenexpresonion.com/ – best darknet markets
Patricktug says:
dark web drug marketplace https://heinekenexpresshop.com/ – dark web market list
PedroEvinc says:
tor dark web https://monopoly-market-onion.com/ – dark market url
Josenot says:
darknet market links https://monopoly-market-onion.com/ – drug markets dark web
Johnnot says:
dark web sites https://cannahomemarket24.com/ – deep web markets
BobbyEvinc says:
darkmarket url https://torrezmarketdarknet.com/ – darknet drug links
FelixMip says:
darknet websites https://monopolymarketwww.com/ – tor market
TimKal says:
tor markets 2021 https://heinekenexpresmarket.com/ – deep web drug url
Sharylhilla says:
dark web link https://oniontorrezurl.com/ – tor market
Rickvurse says:
darknet drug store https://asapmarket-onion.com/ – dark market list
TeddyMip says:
tor marketplace https://cannahomelink.com/ – darknet drug market
Sirsmuct says:
tor market https://darkoderebornmarkets.com/ – best darknet markets
Versusvurse says:
deep web drug markets https://worldonionmarketplace.com/ – bitcoin dark web
Patrickevali says:
darknet drug links https://torrezmarketwww.com/ – tor market
LawrenceCop says:
drug markets onion https://mymonopolymarket.com/ – darknet market lists
JimLib says:
darkmarket 2022 https://heinekenexpresonion.com/ – deep web markets
DavidWhaft says:
dark0de url https://darkoderebornurl.com/ – dark0de url
Kellydum says:
deep web drug markets https://heinekenmarket.com/ – dark market list
JennyMip says:
darkmarket list https://torrez-market-onion.com/ – tor market url
Williamliacy says:
deep web drug links https://darkoderebornlink.com/ – tor markets links
DonnyCop says:
dark web sites https://versus-dark-market.com/ – darknet market lists
Ricconot says:
darkmarket 2021 https://torrezlinkonion.com/ – dark web link
Diedraovers says:
tor dark web https://torrezmarketonion.com/ – tor markets 2022
Anoldvurse says:
dark market link https://monopolymarketurls.com/ – darknet websites
DennyCop says:
darknet market https://darkoderebornmarkets.com/ – darknet drug store
Ashleybar says:
dark market 2022 https://torrezmarketlinkwww.com/ – dark web markets
Samuelnum says:
tor market url https://darkoderebornonion.com/ – dark web link
Bobb1Evinc says:
darkmarket 2021 https://asap-market.com/ – deep web drug links
DiamondEvinc says:
darkmarket 2022 https://worldmarketurltor.com/ – darknet marketplace
최상위파워볼사이트 says:
A big thank you for your post.Really looking forward to read more. Keep writing.
LennyCop says:
deep web drug markets https://heinekenexpresonion.com/ – dark web link
OzzyMip says:
bitcoin dark web https://versusdarkwebmarket.com/ – dark market onion
Dezzyvurse says:
darknet market https://torrezmarketwww.com/ – darknet market links
Patricktug says:
darkmarket url https://heinekenexpresshop.com/ – darknet websites
BobbyEvinc says:
tor markets 2022 https://torrezmarketonion.com/ – dark web markets
PedroEvinc says:
tor market https://monopoly-market-onion.com/ – tor marketplace
Josenot says:
deep web markets https://monopoly-market-onion.com/ – tor markets 2022
Sharylhilla says:
dark market link https://torrezlinkonion.com/ – dark market onion
Johnnot says:
tor markets 2021 https://cannahomemarket24.com/ – drug markets dark web
Sirsmuct says:
dark web drug marketplace https://darkoderebornmarkets.com/ – tor market links
Rickvurse says:
darknet market https://heinekenexpresshop.com/ – deep web drug url
FelixMip says:
drug markets onion https://monopolymarketlinks.com/ – drug markets dark web
JimLib says:
dark web market https://heinekenexpresonion.com/ – tor dark web
Versusvurse says:
dark market onion https://versusprojectmarket.com/ – dark web markets
LawrenceCop says:
darkmarket list https://mymonopolymarket.com/ – drug markets onion
DavidWhaft says:
darknet market https://darkoderebornurl.com/ – dark market 2021
DonnyCop says:
darknet market links https://versus-dark-market.com/ – deep web drug url
DennyCop says:
tor market links https://darkoderebornurl.com/ – dark markets 2022
Diedraovers says:
deep web drug links https://torrezmarketdarknet.com/ – dark web markets
Anoldvurse says:
tor marketplace https://monopolymarketwww.com/ – dark market
TimKal says:
darknet drug market https://heinekenexpresmarket.com/ – tor market links
CVV shops says:
FRESHCC.RU – We hope you visit our Onlinestore and with full consent buy FreshCC.RU from the Store
Williamliacy says:
drug markets dark web https://darkoderebornlink.com/ – darkode reborn
JennyMip says:
drug markets onion https://torrez-market-linkss.com/ – darkmarket 2022
Samuelnum says:
darknet markets https://darkoderebornonion.com/ – tor market url
Ricconot says:
dark market url https://oniontorrezurl.com/ – dark web market list
Ashleybar says:
dark market onion https://torrezmarketlinkwww.com/ – darknet drug links
Kellydum says:
tor dark web https://heinekenmarket.com/ – dark web drug marketplace
LennyCop says:
dark web markets https://heinekenexpresmarket.com/ – darknet drug links
DiamondEvinc says:
tor marketplace https://worldmarketurltor.com/ – drug markets onion
Dezzyvurse says:
darkmarket list https://tortorrezmarket.com/ – darknet drug store
Dylannot says:
deep web markets https://asapmarketlinks.com/ – dark market 2021
OzzyMip says:
darknet drug market https://versusdarkmarket.com/ – dark market onion
Patricktug says:
deep web drug markets https://heinekenexpresshop.com/ – darknet market
Sirsmuct says:
deep web drug url https://darkoderebornmarkets.com/ – darknet market lists
Bobb1Evinc says:
best darknet markets https://asap-market.com/ – tor markets links
BobbyEvinc says:
tor markets 2021 https://torrezmarketonion.com/ – darkmarket
Rickvurse says:
deep web drug links https://asapmarket-onion.com/ – darknet drug market
JimLib says:
dark web markets https://heinekenexpresonion.com/ – darkmarket 2022
PedroEvinc says:
darkmarket 2022 https://monopoly-market-onion.com/ – darknet marketplace
Josenot says:
darknet websites https://heineken.express/ – tor market links
Johnnot says:
dark web link https://cannahomedarkmarket.com/ – dark market url
DavidWhaft says:
tor markets 2022 https://darkoderebornurl.com/ – darknet market lists
LawrenceCop says:
deep web drug store https://monopolymarketonline.com/ – dark markets 2022
DonnyCop says:
darknet market lists https://versusdarknetmarket.com/ – drug markets onion
Patrickevali says:
darknet drug links https://torrezmarketwww.com/ – tor market url
Versusvurse says:
tor market links https://worldonionmarketplace.com/ – darknet markets
FelixMip says:
dark market 2021 https://heineken.express/ – dark web sites
investorjunkie.com says:
Oh my goodness! Incredible article dude! Thanks, However I am having difficulties with your RSS.I don’t understand why I cannot join it. Is there anyone else having identicalRSS problems? Anybody who knows the answer will you kindly respond?Thanks!!
TeddyMip says:
dark market url https://cannahome-markets.com/ – drug markets onion
Williamliacy says:
darkmarket url https://darkoderebornlink.com/ – darknet market list
TimKal says:
dark web market list https://heinekenexpresmarket.com/ – tor markets links
Diedraovers says:
darknet market links https://torrezmarketdarknet.com/ – drug markets onion
DennyCop says:
darkmarket url https://darkoderebornmarkets.com/ – dark market onion
Anoldvurse says:
darknet drug store https://monopolymarketurls.com/ – dark web market
Ashleybar says:
darknet drug store https://torrezmarketlinkwww.com/ – darknet market links
LennyCop says:
tor market url https://torrez-onion.com/ – dark market url
Dezzyvurse says:
darkmarket url https://darkoderebornonion.com/ – dark markets 2022
Sirsmuct says:
deep web markets https://darkoderebornmarkets.com/ – tor market url
JennyMip says:
dark web market links https://torrez-market-urls.com/ – deep web drug links
Ricconot says:
darknet drug market https://torrezlinkonion.com/ – darknet market
DiamondEvinc says:
dark web drug marketplace https://worldmarketurltor.com/ – darknet market lists
Kellydum says:
deep web drug url https://heinekenmarket.com/ – tor dark web
Bobb1Evinc says:
dark web market list https://asap-market.com/ – deep web drug url
Dylannot says:
dark market https://versus-markets.com/ – darknet market lists
Rickvurse says:
tor dark web https://heinekenexpresshop.com/ – darkmarket list
Sharylhilla says:
tor dark web https://oniontorrezurl.com/ – dark web market list
JimLib says:
dark web drug marketplace https://heinekenexpresonion.com/ – dark markets 2022
Patricktug says:
darknet drug store https://heinekenexpresshop.com/ – darkmarket link
DavidWhaft says:
tor market links https://darkoderebornurl.com/ – darknet drug market
LawrenceCop says:
darknet marketplace https://mymonopolymarket.com/ – darkmarket
BobbyEvinc says:
dark web market links https://torrezmarketdarknet.com/ – dark market 2022
OzzyMip says:
drug markets dark web https://versusdarkwebmarket.com/ – dark market 2021
Williamliacy says:
dark0de market https://darkoderebornlink.com/ – darkmarket 2021
DonnyCop says:
dark market onion https://versusdarknetmarket.com/ – dark web market list
PedroEvinc says:
tor markets 2022 https://monopolymarketlinks.com/ – deep web drug markets
Patrickevali says:
dark web sites https://tortorrezmarket.com/ – darkmarket 2022
Versusvurse says:
tor market https://worldonionmarketplace.com/ – dark web market list
Josenot says:
dark markets 2022 https://monopoly-market-onion.com/ – darknet market list
Johnnot says:
deep web markets https://cannahomedarkmarket.com/ – darkmarket list
TeddyMip says:
darknet marketplace https://cannahomelink.com/ – tor markets links
Diedraovers says:
tor market https://torrezmarketonion.com/ – darknet market links
DennyCop says:
dark market 2022 https://darkoderebornmarkets.com/ – darkmarket url
FelixMip says:
darknet drug market https://monopolymarketlinks.com/ – deep web drug links
Anoldvurse says:
best darknet markets https://monopolymarketwww.com/ – dark market 2022
Sirsmuct says:
darknet market https://darkoderebornmarkets.com/ – dark market 2022
Dezzyvurse says:
dark market list https://torrezmarketwww.com/ – tor market
Ashleybar says:
darknet drug market https://torrezmarketlinkwww.com/ – deep web drug store
TimKal says:
dark web drug marketplace https://heinekenexpresmarket.com/ – tor market url
LennyCop says:
darknet drug store https://heinekenexpresonion.com/ – darkmarket link
mp3juice.link says:
I cannot thank you enough for the post. Keep writing.
Rickvurse says:
darknet market https://asapmarket-onion.com/ – tor dark web
JennyMip says:
best darknet markets https://torrez-market-urls.com/ – tor dark web
JimLib says:
darknet market list [url=https://heinekenexpresonion.com/ ]dark market onion [/url]
DavidWhaft says:
darkmarket url https://darkoderebornurl.com/ – deep web drug markets
Ricconot says:
deep web markets https://oniontorrezurl.com/ – dark market list
Sharylhilla says:
darknet drug market https://torrezlinkonion.com/ – dark web drug marketplace
DonnyCop says:
deep web markets https://versusdarknetmarket.com/ – tor markets links
Kellydum says:
dark market link https://heinekenmarket.com/ – dark market link
Bobb1Evinc says:
dark web markets https://asap-market-onion.com/ – darknet markets
DiamondEvinc says:
tor market links https://worldmarketlinktor.com/ – dark web drug marketplace
Dylannot says:
deep web drug links https://versus-markets.com/ – dark web link
LawrenceCop says:
darkmarket link https://mymonopolymarket.com/ – darknet websites
Patricktug says:
deep web drug links https://heinekenexpresshop.com/ – darkmarket
Patrickevali says:
darkmarket 2021 https://tortorrezmarket.com/ – tor markets 2022
OzzyMip says:
darknet websites https://versusdarkwebmarket.com/ – tor market url
Williamliacy says:
darkmarket list https://darkoderebornlink.com/ – tor marketplace
Sirsmuct says:
tor dark web https://darkoderebornmarkets.com/ – tor markets links
BobbyEvinc says:
tor markets 2021 https://torrezmarketonion.com/ – dark markets 2022
Versusvurse says:
darknet marketplace https://versusprojectmarket.com/ – darkmarket list
PedroEvinc says:
tor markets 2022 https://monopoly-market-onion.com/ – dark web link
Johnnot says:
tor market links https://caanahome-market-onion.com/ – darknet drug market
DennyCop says:
tor markets 2021 https://darkoderebornurl.com/ – dark markets 2022
Diedraovers says:
darknet marketplace https://torrezmarketdarknet.com/ – drug markets dark web
Josenot says:
dark market list https://heineken.express/ – dark market url
TeddyMip says:
dark web link https://cannahomeurl.com/ – darknet market list
TimKal says:
dark markets 2022 https://heinekenexpresmarket.com/ – darknet websites
Anoldvurse says:
tor market https://monopolymarketwww.com/ – dark web markets
Dezzyvurse says:
tor market url https://tortorrezmarket.com/ – dark market
Ashleybar says:
deep web drug markets https://torrezmarketlinkwww.com/ – tor market url
LennyCop says:
darknet drug market https://heinekenexpresonion.com/ – drug markets dark web
FelixMip says:
darknet market links https://monopolymarketlinks.com/ – tor marketplace
DavidWhaft says:
darknet websites https://darkoderebornurl.com/ – darknet market links
LLP Registration Chennai says:
Im grateful for the post. Great.
JimLib says:
dark market onion https://heinekenexpresonion.com/ – bitcoin dark web
Sharylhilla says:
dark web market links https://torrezlinkonion.com/ – darknet drug market
Rickvurse says:
darknet market list https://asapmarket-onion.com/ – deep web drug url
DonnyCop says:
darknet websites https://versusdarkmarkets.com/ – darknet market links
JennyMip says:
dark web market list https://torrez-market-onion.com/ – tor market
Sirsmuct says:
dark web link https://darkoderebornmarkets.com/ – dark web drug marketplace
Ricconot says:
best darknet markets https://torrezmarketlinkwww.com/ – darkmarket link
LawrenceCop says:
dark web drug marketplace https://mymonopolymarket.com/ – dark web market
Williamliacy says:
darknet market list https://darkoderebornlink.com/ – dark market 2022
Bobb1Evinc says:
darknet markets https://asap-market.com/ – bitcoin dark web
Patrickevali says:
deep web drug markets https://tortorrezmarket.com/ – deep web drug links
Dylannot says:
darknet market lists https://versus-markets.com/ – tor market links
Versusvurse says:
darkmarket 2022 https://versusprojectmarket.com/ – darkmarket
Samuelnum says:
darknet drug store https://darkoderebornonion.com/ – dark markets 2022
DennyCop says:
tor markets links https://darkoderebornlink.com/ – best darknet markets
BobbyEvinc says:
dark market list https://torrezmarketurls.com/ – darknet markets
OzzyMip says:
deep web markets https://versusdarkmarket.com/ – tor market links
Kellydum says:
darknet market lists https://heinekenmarket.com/ – dark web markets
DiamondEvinc says:
tor market links https://worldmarketsdarknet.com/ – drug markets onion
Diedraovers says:
darkmarket url https://torrezmarketonion.com/ – dark web markets
Patricktug says:
tor market links https://heinekenexpresshop.com/ – darknet drug market
Sirsmuct says:
tor dark web https://darkoderebornmarkets.com/ – dark web market list
Anoldvurse says:
dark market https://monopolymarketwww.com/ – dark market 2022
Dezzyvurse says:
darknet markets https://darkoderebornonion.com/ – darkmarket
Johnnot says:
dark web sites https://caanahome-market-onion.com/ – darkmarket link
JimLib says:
darknet market links https://heinekenexpresonion.com/ – darknet drug store
Ashleybar says:
tor market url https://torrezmarketlinkwww.com/ – darknet websites
LennyCop says:
darknet market links https://heinekenexpresmarket.com/ – darkmarket url
PedroEvinc says:
dark web sites https://monopoly-market-onion.com/ – tor markets links
LLP Registration Chennai says:
I really liked your blog post. Much obliged.
Josenot says:
darknet market lists https://monopoly-market-onion.com/ – darknet market lists
TeddyMip says:
darkmarket 2022 https://cannahomeurl.com/ – deep web drug url
FelixMip says:
dark market https://mymonopolymarket.com/ – darknet market lists
TimKal says:
darknet drug store https://heinekenexpresmarket.com/ – drug markets dark web
Sharylhilla says:
dark web market list https://torrezlinkonion.com/ – dark web drug marketplace
DonnyCop says:
darknet markets https://versusdarkmarkets.com/ – darknet market
DavidWhaft says:
dark market link https://darkoderebornurl.com/ – darknet websites
Rickvurse says:
darknet market lists https://heinekenexpresshop.com/ – tor markets links
Williamliacy says:
darkode url https://darkoderebornlink.com/ – best darknet markets
JennyMip says:
drug markets onion https://torrez-market-onion.com/ – drug markets dark web
Ricconot says:
deep web drug url https://oniontorrezurl.com/ – darknet marketplace
LawrenceCop says:
darkmarket 2021 https://mymonopolymarket.com/ – dark web link
DennyCop says:
darkmarket url dark market list
Versusvurse says:
tor dark web darkmarket url
Patrickevali says:
dark web market dark web sites
Dylannot says:
darknet market lists deep web drug links
Sirsmuct says:
deep web markets tor marketplace
DiamondEvinc says:
darkmarket 2021 deep web drug store
BobbyEvinc says:
deep web drug store tor market url
Bobb1Evinc says:
darkmarket 2021 dark web markets
Total Life Changes Review says:
I value the blog article.Really thank you!
Diedraovers says:
tor marketplace deep web drug links
Anoldvurse says:
dark market url darknet markets
Dezzyvurse says:
darknet market lists tor market url
Ashleybar says:
drug markets dark web darknet market
PedroEvinc says:
dark market drug markets onion
Johnnot says:
deep web markets darknet drug store
LennyCop says:
deep web drug links darkmarket 2021
Josenot says:
deep web markets darknet market links
DavidWhaft says:
dark web drug marketplace darkmarket link
DonnyCop says:
darkmarket url best darknet markets
Rickvurse says:
drug markets onion darknet marketplace
Versusvurse says:
dark market link darknet market lists
LawrenceCop says:
dark web link dark web market
Bobb1Evinc says:
dark web drug marketplace tor markets 2022
DiamondEvinc says:
darkmarket darkmarket list
Dylannot says:
deep web drug markets darknet market links
downloadlagu321 says:
Thanks for the blog post.Really thank you! Awesome.
Anoldvurse says:
dark market onion tor marketplace
PedroEvinc says:
deep web markets dark markets 2022
LennyCop says:
darknet marketplace darknet drug links
Johnnot says:
darknet marketplace dark web link
DonnyCop says:
darknet markets dark web drug marketplace
Rickvurse says:
tor market links deep web drug links
Josenot says:
darkmarket url best darknet markets
LawrenceCop says:
darkmarket link dark web sites
DiamondEvinc says:
dark web link deep web drug links
Bobb1Evinc says:
dark web market links tor markets links
Dylannot says:
deep web drug url tor market
LennyCop says:
deep web drug links dark web market links
Anoldvurse says:
dark web market list deep web markets
DonnyCop says:
deep web drug markets darkmarket 2022
PedroEvinc says:
dark web link best darknet markets
Rickvurse says:
dark web market dark market
Johnnot says:
darknet market list dark market
LawrenceCop says:
drug markets dark web dark market
Josenot says:
dark web markets darkmarket
Versusvurse says:
tor markets 2021 darkmarket url
Bobb1Evinc says:
dark web drug marketplace darkmarket 2022
DiamondEvinc says:
tor markets links deep web drug url
Anoldvurse says:
dark market 2022 deep web markets
Dylannot says:
dark web sites dark market link
DonnyCop says:
tor markets links best darknet markets
reformas en Madrid says:
I used to be able to find good advice from your articles.Also visit my blog Imarais Beauty Cream
how to become a merchant processor says:
Really informative article post.Really thank you! Awesome.
เกมสล็อต 888 says:
I really enjoy the post.Really looking forward to read more. Great.
centro onficial examinador de inglés says:
บาคาร่าเกมไพ่ยอดฮิตติดอกติดใจกันทั่วบ้านทั้งเมืองเนื่องจากเป็นเกมไพ่ที่เล่นง่ายจบเกมไว จึงทำให้ได้เงินไว UFABET ได้เก็บเกมบาคาร่าออนไลน์มาไว้แบบครบทุกค่ายให้ท่านได้เลือกเล่นอย่างจุใจ รองรับด้วยระบบฝากถอนอัตโนมัติไม่ยุ่งยากอีกอีกต่อไปแล้วนะครับ
best entrepreneur in singapore says:
Loved this piece of content, thanks for creating it.
https://shoutfeeds.com/get-lifetime-access-to-best-selling-book-summaries-at-over-90-off-flashbooks-business-book-summaries/ says:
I truly appreciate this article.Really thank you! Will read on…
fashion nova discount says:
Very neat blog. Much obliged.
feet pics says:
Awesome blog post.Thanks Again. Want more.
polvo para fumigar chinches says:
Thank you ever so for you article post.Really thank you! Want more.
oftalmologo bogota 24 horas says:
online pharmacies canada pharma limited llc
mp3 says:
Awesome blog post. Great.
Start a Credit Card Processing Company says:
Great article post.Thanks Again. Cool.
InventHelp stories says:
I truly appreciate this blog post.Thanks Again.
Table and chair rentals Fontana CA says:
I like it when people come together and share thoughts. Great blog, continue the good work.
how do i get a patent says:
Really enjoyed this post.Thanks Again. Really Great.
https://houstonbouncehouse.com/category/water_and_dry_slides/ says:
sildenafil kopen bij apotheek – wanneer helpt sildenafil wat is een sildenafil
InventHelp address says:
Very neat blog article.Really thank you! Will read on…
https://www.dumpsterdiving.no/samfunn/profile/hesterwoodcock9/ says:
Thank you for the auspicious writeup. It if truth be told used to be a enjoyment account
it. Look complex to more brought agreeable from you! By the way, how can we keep up a correspondence?
Archie Gupta says:
Adopt full aluminium alloy panel structure, anodized surface process, ultra-narrow frame, rounded corner design, fashion and beautiful appearance
4mm tempered glass with anti glare 3.Advanced IR 20 touching technology.
The OPS host module adopts plug structure design, internal Inter standard 80pin interface, without any external power line and signal line, which is convenient for inspection, maintenance and upgrade, and achieves the aesthetic effect of the machine
Front side interface: Public USB*3,Touch-USB*1,HDMI*1
Front 8 buttons: POWER ,Input ,Menu, V+, V-, ECO, Home, PC-POWER(Power button for OPS PC only)
Front side speakers, Prevents noise distortion due to embedding
Adopt a high-performance infrared touch technology with anti-blocking and anti-stain functions, and the touch reception will not affect normal writing after blocking at single or multiple infrared transmitting points;
에볼루션카지노 says:
시원하게 드립니다 에볼루션카지노 앞으로도 자주 방문할 예정입니다
Yüksek Kaliteli Blackjack Oyun Masası Üreticilerinden ve says:
Suçluluk Üstü Bulutta Çevrimiçi Bu, Ubuntu Online, Fedora Online, Windows çevrimiçi
öykünücüsü veya MAC OS çevrimiçi öykünücüsü gibi birden fazla ücretsiz çevrimiçi iş istasyonumuzdan birini kullanarak
OnWorks ücretsiz barındırma sağlayıcısında çalıştırılabilen suçluluk üst komutudur.
Çevrimiçi Casino N1 Kadı yönetimindeki says:
Türkiye’nin yıllardır vazgeçilmez oyun platformu ve
sitesi olan Mynet Oyun’un keyifli dünyasına
hoş geldiniz! Tek kişilik oyunlar, MMO oyunları
ve çok kişilik oyunlar ın yıllardır vazgeçilmezi olan Mynet Oyun,
her gün güncellenen en iyi ve popüler oyunları ile 7’den 70’e her yaş grubundan oyuncunun oynayabileceği.
Casino eklentisi Minecraft yaşam döngüsü says:
Para çekim için alt limti 50 TL iken üst limit 100.000 TL’ye kadar çıkabilmektedir.
Ne kadar çekilmek istenildiği ise tamamen üyelerin isteklerine kalmış
bir durum olacaktır. Royalcasino Para Çekme Kullanıcıların üye olurken merak
ettiği konulardan biri para çekme işlemleridir.
Huuuge casino chips huuuge Casino Slots Enarganzuela says:
20 free spins witho Bitcoin kumar, son yıllarda birçok kumar hayranının geleneksel çevrimiçi kumarhaneler lehine kripto kumarhanelerinde oynamayı seçmesiyle.
Rakul Preet Singh HD Duvar Kağıtları Casino says:
Kazanan oyun stratejileri. Online oyunlar ücretsiz para
kazanın bu nedenle, her yıl milyonlarca turisti
ağırlayan ve birçok ilk ve en ile adı eşanlamlı bir şehir.
Örneğin, ancak belirlenen kuralları net bir şekilde izlerseniz.
Bilgisayarınız için en iyi ücretsiz yazılımları
edinin, futuriti casino herhangi bir sorun yaşamadan kar elde
edebilirsiniz. Firmadan araç.
Poker Night 2 Telltale Games PS3 PSN Oyun İndir [MEGA] says:
BlackJack Nasil Oynanir. Yazar: 20bets10 Yayımlanmış Güncellendi BlackJack yani türkçe karşılığı 21
oyunu dünya genelinde en popüler casino oyunlarından dır, bu yazımızda nasıl oynanır, kuralları nelerdir, nasıl kazanılır gibi faydalı bilgilere yer vereceğiz.
Blackjack her zaman.
Fiona viotti sex tape says:
Tarihli ve 4.2022.-16042 sayılı Bilgi Teknolojileri
ve İletişim Kurumu kararıyla erişime engellenmiştir.
has been blocked by the decision dated and numbered 4.2022.-16042
of Information and Communication Technologies Authority.
II. Meşrutiyet Dönemi nde Toplumsal Ahlâk Bunalımı: Fuhuş says:
Video yengesini minibüsde sikiyor turfali arap olgun kadını sikiyor search incredibly difficult to
find, but the editors of did their best and collected
1008 XXX porn videos. We are glad to inform you, you don’t have to search for no need to search
all over the internet for the desired video. Below are sexiest videos with yengesini minibüsde
sikiyor turfali arap olgun.
japon oğlu zorla sikiyor Pornosu izle says:
PDF Drive, Kitap Deposu insanların istedikleri kitaplara ve
kitap bilgilerine daha hızlı ulaşmalarını sağlamak ve daha hızlı
satın alabilmeleri için kurulmuştur.
Other Xxx Video Brandi Love Rape Video Brandi Cry By Fuck says:
Sigara içen ve gebe kalmaya çalışan anne adayının, ‘gebe kalınca bırakacağım’
öncesi çiftler sigarayı bırakmalı, tedaviye ondan sonra başlanmalıdır.
Büyükannem Evleniyor 2019 Filmi Türkçe Altyazılı Full izle says:
Watch BBW Nasty Anal Fuck tube sex video for free on xHamster, with the sexiest collection of BBW Mobile Beeg BBW & Free Nasty BBW porn movie
scenes!
zenci beyaz grup seks says:
Bence yerine göre ikisi de kötü ve çekici değil.
Zira bir kızı sevip hoşlandıysam aynı şekilde o da benden hoşlanıp beni sevdiyse aramızda Cinsel
Yaşam Sorusu.
ADNET FOI FLAGRADO AOS BEJOS COM çirkin büyülüyor says:
This is “Abisi gidince evde sikiş başlıyor” by Ceyda
Çelik on Vimeo, the home for high quality videos and the people
who love them.
hd seks sinema Sıcak porno check Yetişkin says:
Stok fotoğraf Mutlu çocuklar dışarıda eğleniyor.
Yaz parkta oynayan çocuklar. Küçük bir çocuk ve iki kız yeşil Taze çimenlerin üzerinde döşeme # Depositphotos
popüler fotoğrafçılık sitesi Milyonlarca telifsiz
görsel, tematik koleksiyonlar, hızlı.
2001 says:
2001
striplife.ru says:
striplife.ru
Мизансцена says:
Мизансцена
dolpsy.ru says:
dolpsy.ru
nakushetke.ru says:
nakushetke.ru
lastduel.ru says:
lastduel.ru
k-tv.ru says:
k-tv.ru
573 says:
573
696 says:
696
201 says:
201
918 says:
918
1151 says:
1151
1088 says:
1088
342 says:
342
695 says:
695
574 says:
574
паническая атака во сне says:
паническая атака во сне
artist-bio.ru says:
artist-bio.ru
фильмы 2022 2023 смотреть онлайн бесплатно в хорошем качестве уже вышедшие says:
фильмы 2022 2023 смотреть онлайн бесплатно в хорошем качестве уже вышедшие
эта фарфоровая кукла влюбилась аниме персонажи says:
I quite like reading an article that can make men and women think.
Also, many thanks for permitting me to comment!
смотреть фильм онлайн says:
смотреть фильм онлайн
Онлайн консультация психолога says:
Онлайн консультация психолога
Психолог онлайн says:
Психолог онлайн
Память says:
Память
Всё везде и сразу says:
Всё везде и сразу
Natural Remedies During Divorce says:
I was very pleased to discover this website. I want to to thank you for ones time for this
particularly wonderful read!! I definitely appreciated every part of it and i also have you saved to fav to look at new
things in your website.
buy cialis cheap says:
Fine way of explaining, and nice piece of writing to take
data concerning my presentation topic, which i am going to present
in college.
mgfmail.ru says:
mgfmail.ru
mgfmail.ru says:
mgfmail.ru
company-blog.ru says:
company-blog.ru
hotel panorama oberwiesenthal says:
hotel panorama oberwiesenthal
สล็อตpgทดลองเล่น says:
Oh! This is very GOOD. I have more detils.. mega slot
ทดลองเล่นเกม pg says:
I like this more and more. I have some more, Please check.. ทดลองเล่นสล็อต
Malana says:
I love this content. Please view my content.. ทดลองเล่นสล็อต pg ไม่เด้ง 2023
крым 2023 says:
крым 2023
สล็อตออนไลน์ says:
I value the time you’ve taken out to give me the general tour and guarantee that I have the necessary information to work really hard. Much obliged to you. สล็อตออนไลน์
consulta el precio del promethazine en Perú says:
Thank you for every other fantastic article. The place else may just
anyone get that type of information in such a perfect manner of writing?
I’ve a presentation subsequent week, and I’m on the look for
such info.
viagra 50 mg para comprar en línea en México says:
It’s awesome to visit this web page and reading the views of all mates
on the topic of this paragraph, while I am also eager
of getting experience.
Latrice says:
It’s remarkable to go to see this web site and reading the views of all mates on the topic of this paragraph, while
I am also zealous of getting familiarity.
คาสิโน Ambbet says:
เว็บเดิมพันออนไลน์สมัยใหม่ คาสิโน Ambbet เว็บคาสิโนสด สตรีมออนไลน์จากต่างประเทศสถานที่จริง ส่งตรงพร้อมเสิร์ฟความสนุก เเละ เงินรางวัลให้กับนักเดิมพันทุก่าน คาสิโนเว็บใหญ่ เว็บตรง ไม่ผ่านเอเย่นต์ เเหล่งรวมเกมเดิมพันออนไลน์ครบวงจร สล็อต บาคาร่า มีให้เล่นครบทุกค่าย เดิมพันได้อย่างอิสระ เสถียร ลื่นไหล ไม่เด้ง ไม่หลุด เลือกเดิมพันกับ Ambbet รับโบนัสฟรีทุกวัน
Опсуимолог кто это says:
«Миссия и предназначение» «Идея всей жизни!»
Миссия – «Что я делаю?» Нет.
Ценности – «Что для меня важно?» тоже нет.
Видение – «Куда я иду (хочу придти)?» уже ближе.
Миссия – стержень: вектор: который определяет смысл!
Вбивай в поиск: “опсуимолог” и получи актуальные
контакты.
Ты же знаешь кто такой опсуимолог?
amanita caesarea says:
Good way of describing, and pleasant piece of writing to take facts about
my presentation subject, which i am going to deliver in institution of higher education.
cialis online india says:
I read this article completely concerning the difference
of hottest and previous technologies, it’s remarkable
article.
mobileslot.Evenweb.com says:
Thanks, I’ve just been searching for info about this subject for ages and yours is the best I have found out till now. However, what concerning the bottom line? Are you certain about the supply?
Also visit my webpage: https://mobileslot.Evenweb.com/
Https://61C482F1F0A2E.Site123.Me says:
A motivating discussion is definitely worth comment. I think that you ought to publish more on this issue, it might not be a taboo subject but generally folks don’t speak about such issues. To the next! Kind regards!!
Here is my web page: https://61C482F1F0A2E.Site123.me/
http://Forum.survival-readiness.com/viewtopic.php?t=274109 says:
I’m not positive where you are acquiring your facts, but fantastic issue. I requirements to expend some time scholarship additional or comprehension more. Thank you for brilliant facts I was appearance for this facts for my task.
Review my web blog :: http://Forum.survival-readiness.com/viewtopic.php?t=274109
Http://Forum.D-Dub.Com/ says:
Thank you, I’ve just been looking for info about this topic for an extended time and yours is that the greatest I have discovered till now. However, what in regards to the bottom line? Are you positive concerning the supply?
Also visit my web site :: http://forum.D-dub.com/member.php?838114-Veronaafp
http://forum.d-dub.com/member.php?840269-Svetlanabax says:
An compelling discussion is definitely worth remark. I do believe that you should write read more about this topic, it might not be a taboo topic but usually people don’t talk about so. To the next! All the best!!
Also visit my web-site … http://forum.d-dub.com/member.php?840269-Svetlanabax
http://himeuta.org/member.php?1570517-Svetlananae says:
I blog quite often and I genuinely appreciate your information. This text has really peaked my interest. I am going to book mark your blog and keep checking for new details about once per week. I subscribed to your Feed as well.
Here is my website … http://himeuta.org/member.php?1570517-Svetlananae
http://forum.ll2.ru/member.php?694995-Sergzsn says:
Astonishing! This blog gazes exactly similar my old one! It’s on a fully at variance matter but it has beautiful much the same page layout and blueprint. Spectacular preference of colours!
Feel free to surf to my web-site http://forum.ll2.ru/member.php?694995-Sergzsn
http://forum.d-dub.com/member.php?1019684-Sergcdv says:
Howdy, everything is happening flawlessly here and clearly everyone is exchanging data, that’s truly exceptional, uphold scribbling.
Here is my page: http://forum.d-dub.com/member.php?1019684-Sergcdv
http://forum.d-dub.com/member.php?839851-Sergoir says:
Thank you for sharing your views. Regards!
Also visit my web-site :: http://forum.d-dub.com/member.php?839851-Sergoir
http://Www.smokinstangs.com/ says:
Terrific article! We can exist linking to this explicit big article on our web site. Uphold the good writing.
Look at my page – http://Www.smokinstangs.com/member.php/281209-Serzovi
Spearboard.Com says:
I am perpetually opinionated about this, appreciate it for posting.
my page – http://Spearboard.com/member.php?u=1286873
http://himeuta.org/member.php?1537264-Evarag says:
You made some decent points there. I looked on the subject matter and found a great deal of individuals will agree with your site.
Feel free to visit my site http://himeuta.org/member.php?1537264-Evarag
Adrian says:
It�s difficult to find knowledgeable people on this topic, however, you seem like you know what you�re talking about! Thanks
my webpage; http://forum.ll2.ru/member.php?435855-Evapgh
http://Forum.Ll2.ru/member.php?702609-Evatmt says:
I have been browsing on-line more than 3 hours these days, but I by no means discovered any attention-grabbing article like yours. It’s lovely value enough for me. Personally, if all web owners and bloggers made just right content material as you probably did, the internet might be a lot more helpful than ever before.
My web blog: http://Forum.Ll2.ru/member.php?702609-Evatmt
http://www.glaschat.ru/glas-f/member.php?358725-Davidxoo says:
I am genuinely delighted to glimpse at this blog posts which contains plenty of practical knowledge, thank you for providing such facts.
Feel free to visit my web page; http://www.glaschat.ru/glas-f/member.php?358725-Davidxoo
http://Www.Spearboard.com/member.php?u=813516 says:
Do you have a spam issue on this site; I also am a blogger, and I was thinking about your situation; we have created some nice methods and we are looking to exchange solutions with others, please shoot me an e-mail if interested.
my homepage :: http://Www.Spearboard.com/member.php?u=813516
http://Forum.As-P.cz/viewtopic.php?f=38&t=266318 says:
Do you have a spam issue on this website; I also am a blogger, and I was wanting to your situation; we have developed some nice methods and we are looking to exchange strategies with others, please shoot me an e-mail if interested.
Have a look at my web blog – http://Forum.As-P.cz/viewtopic.php?f=38&t=266318
Ernestine says:
fantastic issues as an entire, you simply won a logo new reader. What may you suggest post that you simply made a few days ago? certain?
my blog post … http://forum.gokickoff.com/index.php?topic=211513.new
Mathew says:
Astonishing! This blog gazes exactly similar my old one! It’s on a entirely at variance issue but it has beautiful much the same page layout and blueprint. Spectacular preference of colours!
My web page; http://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=12459
forum.Ll2.Ru says:
I have not checked in here for a while as I thought it was getting boring, but the last few posts are good quality so I guess I’ll add you back to my day-to-day bloglist. You deserve it my friend 🙂
Here is my webpage – http://forum.ll2.ru/member.php?1112683-Eldarjht
youtube pc download says:
This piece of writing is genuinely a good one it helps
new internet people, who are wishing in favor of blogging.
Dorothy says:
Greetings, all is happening nicely here and clearly everyone is exchanging facts, that’s really exceptional, uphold scribbling.
Feel free to surf to my blog – http://www.Glaschat.ru/glas-f/member.php?434490-Leonahq
http://www.Oople.com/forums/member.php?u=236284 says:
Superb article! We can exist linking to this explicit big subject matter on our location. Uphold the good scribbling.
Feel free to visit my site – http://www.Oople.com/forums/member.php?u=236284
http://forum.ll2.ru/member.php?693787-Leonajq says:
It�s nearly impossible to find educated people in this particular topic, however, you sound like you know what you�re talking about! Thanks
My web page … http://forum.ll2.ru/member.php?693787-Leonajq
http://forum.D-dub.com/member.php?464360-Leonqco says:
I blog frequently and I seriously appreciate your information. The article has really peaked my interest. I’m going to book mark your blog and keep checking for new details about once per week. I opted in for your RSS feed too.
my homepage … http://forum.D-dub.com/member.php?464360-Leonqco
http://Www.Dendymaster.ru/ says:
Hello, I would like to subscribe for this web site to obtain newest updates, therefore where can i do it amuse aid.
Also visit my site; http://Www.Dendymaster.ru/forum/showthread.php?p=49139
http://Mail.spearboard.com/member.php?u=806513 says:
This is truly engaging, You are an overly skilled blogger. I’ve coupled your rss channel and sit up for seeking more of your brilliant post. Additionally, I’ve shared your location in my social networks!
Stop by my homepage – http://Mail.spearboard.com/member.php?u=806513
http://WWW.Smokinstangs.com/member.php/279103-Irinazx says:
Hello, I would like to subscribe for this website to acquire hottest updates, therefore where can i do it amuse help out.
Here is my web-site – http://WWW.Smokinstangs.com/member.php/279103-Irinazx
post49863 says:
I blog often and I really appreciate your information. The article has truly peaked my interest. I will bookmark your site and continue checking out for new details about once a week. I opted in for your Feed too.
My webpage … http://www.dendymaster.ru/forum/showthread.php?p=49863
http://www.hotboat.com/frm/member.php?u=12357 says:
Greetings very remarkable blog!! Chap .. Fantastic .. Astounding .. I will bookmark your website and take the feeds additionally�I’m glad to notice so numerous valuable knowledge present in the post, we’d similar to increase more methods on this regard, thank you for distribution.
my webpage http://www.hotboat.com/frm/member.php?u=12357
hoteles en universal says:
Мир новости тенниса: сенсационная победа молодого спортсмена.
my blog post https://www.royalholloway.ac.uk/
По теме. says:
Просто знать – этого недостаточно.
Надо применять. Желать – этого
недостаточно. Надо делать
По теме.
bwd электромобиль says:
Электромобиль Эволюшн – российский проект с амбициями.
Here is my web page – http://wiki.algabre.ch/index.php?title=Elektromobili_34a
рулевое управление комбайна says:
Проверьте https://sun-clinic.co.il/he/question/rulevoe-upravl-4w/ управление перед каждой поездкой.
рулевое управление луаз says:
Принцип рулевого управления основан на передаче усилия.
Review my site; https://ctpedia.org/index.php/Rulevoe-upravl_84w
топливный насос для карбюратора электрический says:
Топливный https://sun-clinic.co.il/he/question/topliv-nasos-31n/ ВАЗ 2115 аналогичен насосу ВАЗ 2114.
exodermin krém says:
Exodermin dónde comprar
En la búsqueda de soluciones efectivas para el cuidado personal, es común sentirse abrumado por la gran cantidad de opciones disponibles. Existen tantas fórmulas, tratamientos y productos en el mercado que a veces es difícil escoger. La clave está en encontrar aquello que realmente funcione y que se ajuste a tus necesidades específicas. Hoy, exploraremos aspectos importantes acerca de cómo y dónde puedes hacerte con ciertos tratamientos innovadores.
La eficiencia y la calidad son primordiales. Sin embargo, no solo hay que preocuparse por el producto en sí, sino también por el lugar donde se adquiere. La confianza en el proveedor juega un papel crucial. Por eso, antes de tomar una decisión, es fundamental informarse adecuadamente.
Internet ofrece una vasta gama de opciones, pero esto puede ser tanto una bendición como una maldición. Es fácil perderse en la jungla de sitios web, promociones y reseñas. ¿Dónde encontrar un punto de venta fiable? ¿Cuáles son las características que debe tener un buen distribuidor? A continuación, daremos respuesta a estas interrogantes.
Un buen consejo es investigar sobre la reputación de los sitios que consideres. Las opiniones de otros usuarios a menudo reflejan la calidad del servicio y del producto. Esto puede darte una idea más clara de qué esperar. Recuerda, buscar la autenticidad es esencial, así como asegurarte de que el producto cumple con los estándares necesarios.
Cómo adquirir el producto de forma segura
A la hora de hacerse con un artículo altamente valorado, la seguridad es primordial. Buscar un vendedor de confianza debe ser tu primera prioridad. No es recomendable realizar transacciones en lugares desconocidos o a través de canales poco seguros. La cautela al adquirir este tipo de soluciones es fundamental.
Primero, verifica siempre la autenticidad del distribuidor. Opta por plataformas oficiales o recomendadas. Además, revisa las opiniones de otros usuarios. La experiencia de otros puede ofrecerte una visión clara. Existen foros y comunidades en línea que comparten información valiosa.
Asegúrate de que el sitio web tenga las medidas de seguridad necesarias. La URL debe comenzar con “https” para garantizar una conexión segura. Asimismo, busca sellos de verificación que respalden la fiabilidad del vendedor. Cada paso que tomes te acercará a una compra segura y satisfactoria.
También ten en cuenta las políticas de devolución que propone el vendedor. Esto es esencial, ya que podría existir alguna insatisfacción con el producto recibido. Una buena garantía demuestra compromiso por parte del distribuidor, lo cual es un factor a no subestimar. Todo esto contribuirá a que tu experiencia sea positiva y sin contratiempos.
Opciones en línea para adquirir su producto
Si estás buscando la manera de hacerte con este tratamiento, tienes varias alternativas en la red. Las plataformas digitales ofrecen una gran conveniencia. Puedes acceder a diferentes tiendas virtuales con solo unos clics. Es importante ser prudente y elegir bien dónde realizar la gestión, ya que la fiabilidad y la calidad del producto son esenciales.
Una opción destacada son las farmacias en línea reconocidas, que brindan un servicio seguro y confiable. Estas tiendas suelen ofrecer envíos rápidos y descuentos atractivos. Además, cuentan con la ventaja de proporcionar información detallada sobre el tratamiento. En ocasiones, permiten leer las opiniones de otros usuarios, lo que puede ser muy útil a la hora de tomar una decisión informada y acertada.
Otra alternativa son los marketplaces, donde múltiples vendedores ofrecen productos variados. Es posible encontrar precios competitivos y promociones interesantes, pero aquí la precaución es clave. Siempre verifica la reputación del vendedor y las valoraciones de otros compradores para asegurarte de que haces una elección segura. Por lo general, en estos sitios puedes comparar diferentes opciones en cuanto a formatos y precios que se adapten a tus necesidades.
Si prefieres un enfoque más personalizado, algunas páginas web de salud ofrecen la opción de asesoría online. Esto puede incluir consultas con profesionales que te guiarán sobre el uso del producto. Aunque esta opción pueda parecer menos común, muchas personas la consideran conveniente y valiosa.
Finalmente, recuerda revisar las políticas de devolución y garantía del sitio donde planeas realizar la transacción. Estos detalles ofrecen tranquilidad y respaldo en caso de que el producto no cumpla tus expectativas o hayas cometido un error en tu elección. Así que, explora las diferentes caminos digitales, compara y, sobre todo, elige aquel que te brinde confianza y seguridad en tu experiencia de compra.
https://exodermin.net/es/
vancouver sports memorabilia says:
https://365.expresso.blog/question/sports-memorabilia-52a/ memorabilia worth makes for perfect gifts for sports enthusiasts.
Costs insurance says:
I was looking for information on whether Medicare covers cataract surgery. This post provided all the details I needed about supplements and coverage limits.
https://lakeinsuranceok.com/eligibility
manhinhmaytinhcu.com says:
river spirit casino
References:
https://manhinhmaytinhcu.com/kien-thuc-man-hinh-may-tinh/phan-mem-ho-tro-tat-va-khoi-dong-may-tinh/
https://bjerrum-grossman-2.technetbloggers.de/stylos-hgh-pour-flacons-a-double-chambre-stylo-dinjection-dhormone-de-croissance says:
muscle cutting supplement
References:
https://bjerrum-grossman-2.technetbloggers.de/stylos-hgh-pour-flacons-a-double-chambre-stylo-dinjection-dhormone-de-croissance
https://hoanghungphat.vn/tiem-nang-bat-dong-san-binh-phuoc-2021-2030 says:
no deposit bonus forex
References:
https://hoanghungphat.vn/tiem-nang-bat-dong-san-binh-phuoc-2021-2030/
https://atavi.com/share/xq6nr4zrhvm8 says:
super beta prostate vitamin reviews
References:
https://atavi.com/share/xq6nr4zrhvm8
boccuzzigioielli.it says:
blackjack surrender
References:
https://boccuzzigioielli.it/prodotto/collana-lucciole-con-perle/
traveltovizag.com says:
References:
Victoria casino
References:
https://traveltovizag.com/news/travel-tourism/best-tourist-places-in-india-a-travelers-paradise/
https://sportpoisktv.ru/author/ratheron94 says:
dmaa bodybuilding
References:
https://sportpoisktv.ru/author/ratheron94/
sofort-casino.online-spielhallen.de says:
References:
Kickapoo lucky eagle casino
References:
https://casino-in-paris.online-spielhallen.de/
https://crazeplay-casino.online-spielhallen.de says:
References:
Treasure valley casino
References:
https://online-casino-gratis-spielen.online-spielhallen.de/
Recklinghausen says:
References:
Mainz
References:
https://ybets-casino.online-spielhallen.de/
Hanover (Hannover) says:
References:
Nuremberg (Nürnberg)
References:
https://application-casino.online-spielhallen.de/
Gelsenkirchen says:
References:
Ingolstadt
References:
https://double-double-casino.online-spielhallen.de/
Rostock says:
References:
Gütersloh
References:
https://sheraton-cairo-hotel-and-casino.online-spielhallen.de/
graph.org says:
References:
Suncoast casino las vegas
References:
https://graph.org/Best-Online-Gambling-Pokies-04-27
https://graph.org/HellSpin-Casino-App-For-Android-04-27 says:
References:
G casino sheffield
References:
https://graph.org/Can-You-Wear-Crocs-Into-A-Casino-04-27
telegram bot says:
Loving how smooth – beautiful free gifts + targeted growth
My page; https://bbarlock.com/index.php/Netxmixbot_72o
lesbian porn site says:
Nieuwste porno platforms bieden geavanceerde inhoud voor volwassenen. Kies voor
betrouwbare frisse sites voor veilig kijken.
Feel free to visit my web page lesbian porn site
best anal porn site says:
Expliciete inhoud sites bieden een verscheidenheid
aan video’s voor volwassen entertainment. Kies voor
gegarandeerde platforms voor een veilige ervaring.
Here is my homepage … best anal porn site