
就如同各位從零開始的夥伴們,你們一定很想快點看到,一台可以裝上雷射LiDAR導航,自主漫遊 + 路徑規劃 + 自主避障 + 影像AI &^$%^#%%^%^&%^ ~ 等等集合了目前self-driving 前端科技的家用小車八 !! 我們記錄一位工程師,他是如何從零開始的學習、蛻變到一位 self-driving developer的過程。
話說,這一開始的動作應該也是記錄摸索的過程,不過,這卻是最真實的、殘酷與慘痛代價的經驗。希望這些記錄可以減少後面跟進的學習者們寶貴的時間。
在此定義初階段的學習標的 :
- 遠端遙控機器人
- LiDAR雷達建地圖
- 自主導航與避障
- 路徑規劃 (到這 ~ 基本該會的操作都已經具備了)
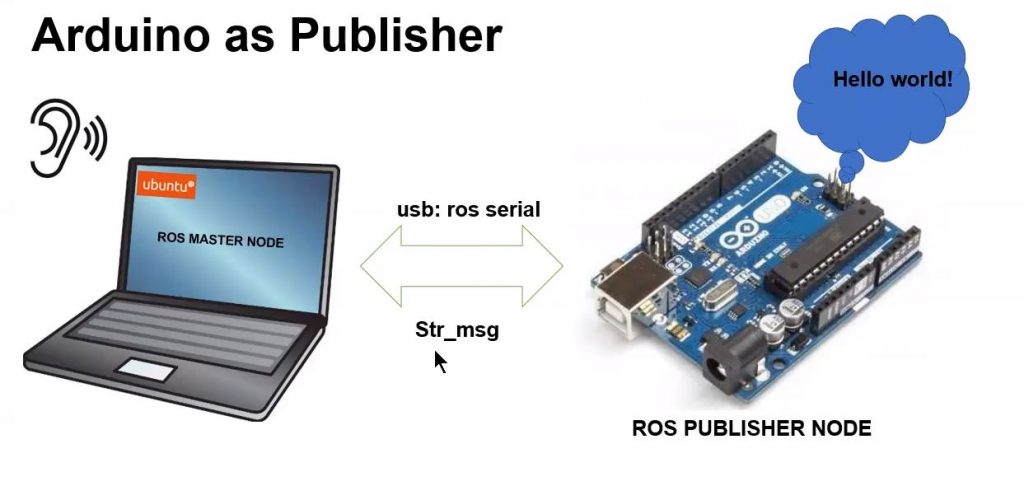
我們就從 “ROSSerial_Arduino測試 (ROS通訊點亮Arduino LED實驗)” 開始吧 !
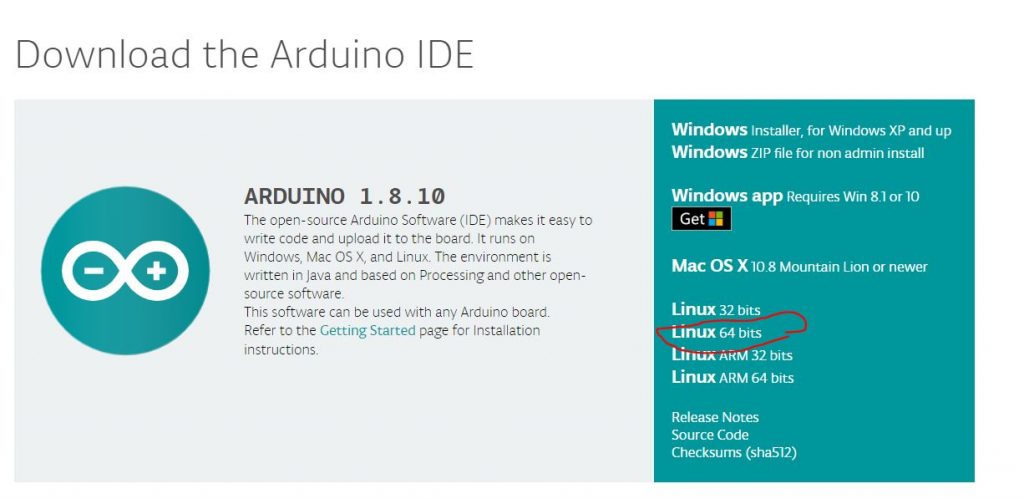
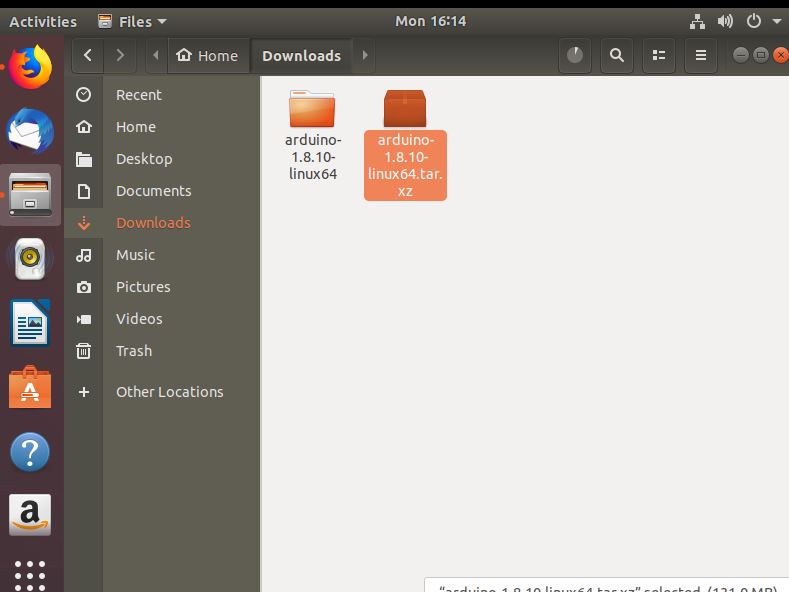
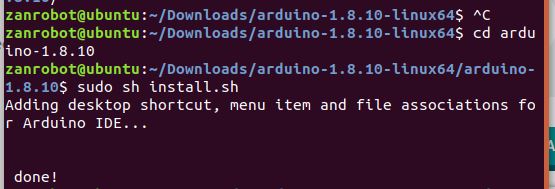
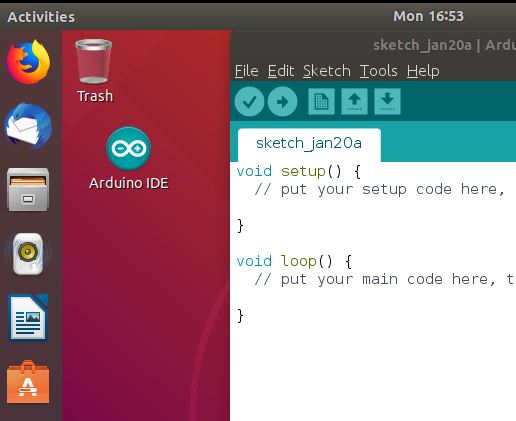
1-1、Arduino IDE安裝與設定
安裝好後,最後會在桌面上看到Arduino的圖案。
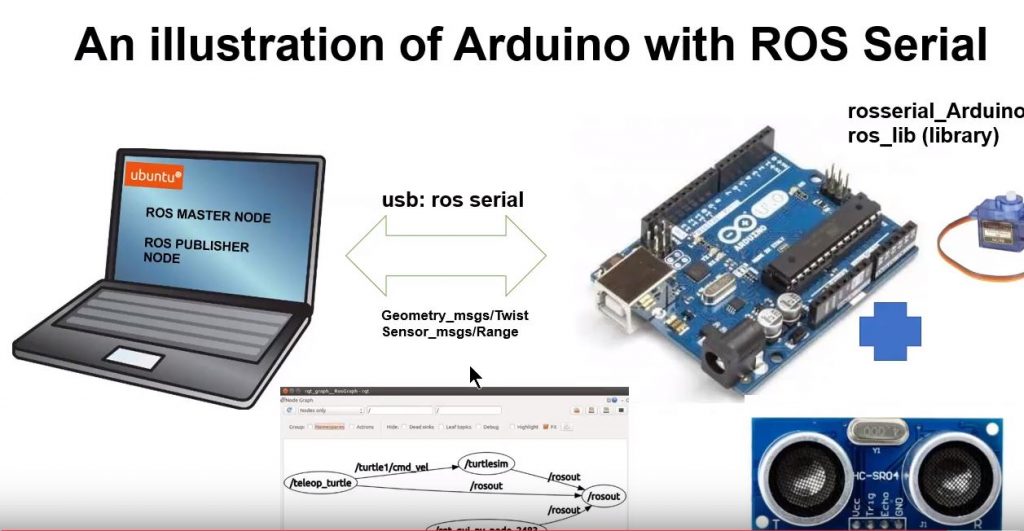
1-2、連線架構
使用裝備 :
- ACER i5 筆電 win10系統
- 樹梅派 Pi4 B (2020 年最新版)
測試架構 :
- 使用PC (VM)環境架設MASTER 並運行 Publisher 這兩個nodes
- Arduino 燒錄roserial (ros_lib)的接收程式,控制LED
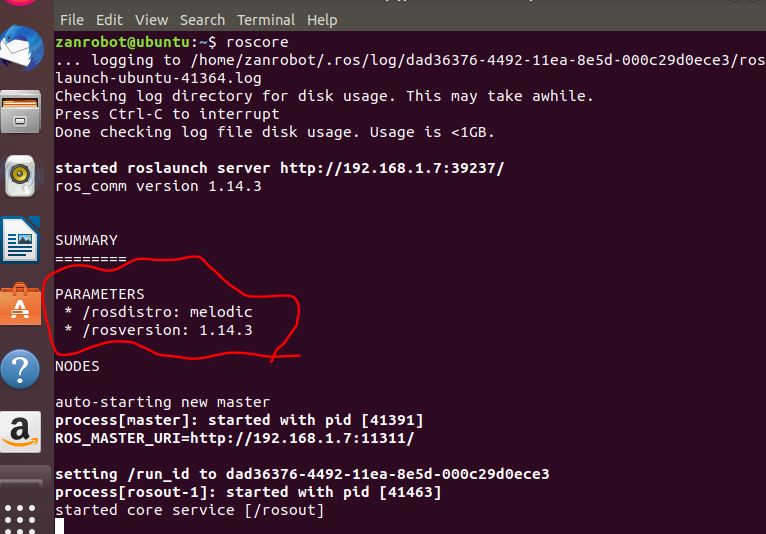
筆電中的VM環境再貼一次 :
1-3. 介紹ROS Serial
參考官網 。若是你想用Arduino來做ROS的通訊模組 (也就是作為一個ROS nodes),包括publish, subscribe ROS的messages, publish TF transforms 和 get the ROS system time。 rosserial provides a ROS communication protocol that works over your Arduino’s UART. rosserial_arduino package, you can use ROS directly with the Arduino IDE. 喔! rosserial 這個函式庫下面有許多packages,目的就是在不同硬體系統中,可以容易地運行一個ROS node。
1-4. 安裝軟體
有兩步驟 : 先安裝自己的ROS 工作站 ,再安裝 ros_lib 在自己的Arduino IDE環境中。
1-4-1. 安裝自己的ROS 工作站
官網有兩種方式,一個是安裝編譯好的binaries code,另一種是從source code先編譯再安裝,我們選擇第一種(官方建議的)。
You can install rosserial for Arduino by running:
sudo apt-get install ros-melodic-rosserial-arduino sudo apt-get install ros-melodic-rosserial
你可以把 melodic 換成你自己的ros 版本如 indigo 等
再來到 /libraries 下面檢查是否事先有ros_lib資料夾,若是有先delete掉。
cd ~/Arduino/libraries rm -rf ros_lib rosrun rosserial_arduino make_libraries.py .
以上完成後,就可在 /ibraries 下面找到 ros_lib的資料夾
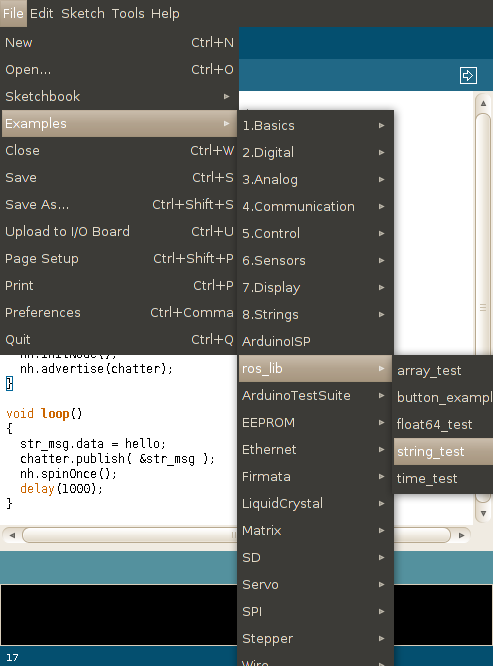
開啟Arduino IDE ,檢查以下是否存在。
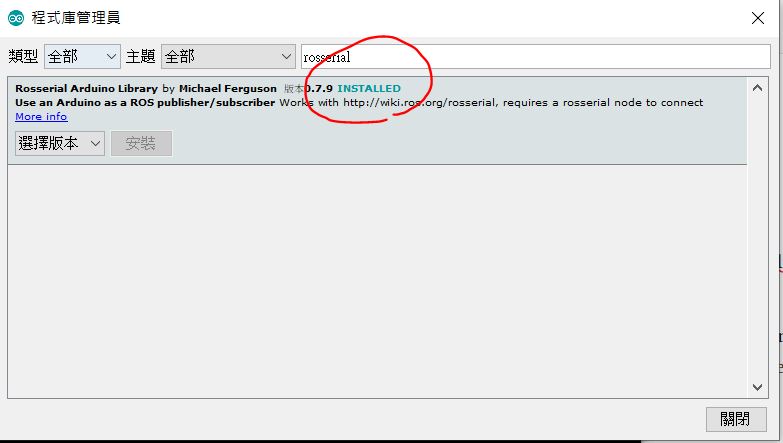
PS : 目前,另一種更簡單的作法,就是如果你不想花功夫針對你的ROS工作站去做完全安裝,你只是要可以在Arduino上跑ROS的通訊協定,你可以採用以下 :
*Note: Currently you can install the Arduino libaries directly in the Arduino IDE. Just open the Library Manager from the IDE menu in Sketch -> Include Library -> Manage Library. Then search for “rosserial”. This is useful if you need to work on an Arduino sketch but don’t want to setup a full ROS workstation.
1-5. 測試 Arduino 的 Hello World (example publisher)
參考官網
先燒錄Arduino程式,第一次可能會出現 ” can’t open device “/dev/ttyS0″: Permission denied ” ; 處理方式,
sudo usermod -a -G dialout <username> , 其中 username 用你Linux的帳號,我自己是 zanrobot ; 完成後先logout出系統,再 login一次。此時,再燒錄Arduino時就不會有問題。
接著當以下 :
Now, launch the roscore in a new terminal window:
roscore
Next, run the rosserial client application that forwards your Arduino messages to the rest of ROS. Make sure to use the correct serial port:
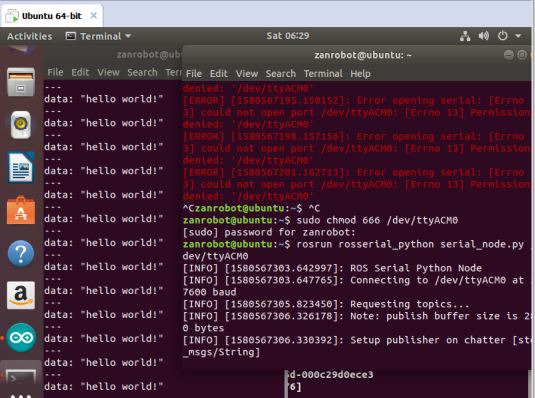
rosrun rosserial_python serial_node.py /dev/ttyUSB0
此時,又會出現
[ERROR] [1580567065.273146]: Error opening serial: [Errno 13] could not open port /dev/ttyACM0: [Errno 13] Permission denied: ‘/dev/ttyACM0’

此時,處理一下 serial port權限的問題,
sudo chmod 666 /dev/ttyACM0測試最後的結果,如下 : 在 VM上的node,可以收到Arduino 發佈出的文字訊息 “hello world” !
Bradleysab says:
ivermectin 18mg http://stromectolivermectin19.com/# ivermectin 9 mg
stromectol cvs
Bradleysab says:
stromectol in canada http://stromectolivermectin19.com/# ivermectin nz
stromectol tablets buy online
Johnnieglymn says:
ivermectin lotion stromectol for sale – ivermectin 2ml
Johnnieglymn says:
ivermectin purchase ivermectin for humans – ivermectin buy online
RodneyLycle says:
medical pharmacy west canadian pharmacies compare – mexican pharmacy what to buy
RodneyLycle says:
cheap scripts pharmacy order pharmacy online egypt – canadian pharmacy ltd
RodneyLycle says:
india pharmacy mail order legitimate online pharmacies india – cheap generic drugs from india
RodneyLycle says:
buy prescription drugs online legally ed prescription drugs – how to get prescription drugs without doctor
RodneyLycle says:
prescriptions from india cheap generic drugs from india – india pharmacy mail order
RodneyLycle says:
india pharmacy cialis cheap generic drugs from india – legitimate online pharmacies india
RodneyLycle says:
med pharmacy canada pharmacy safedrg – canadapharmacyonline legit
RodneyLycle says:
cheap generic drugs from india buy prescriptions from india pharmacy – medication from india
Clintonginty says:
zithromax 500 price order zithromax – zithromax for sale cheap
Clintonginty says:
plaquenil eye damage hydroxychloroquine canada – hydroxychloroquine 800 mg
Clintonginty says:
prednisone for sale online prednisone without dr prescription – 5 mg prednisone tablets
Clintonginty says:
can you buy prednisone without a prescription buy prednisone – prednisone tabs 20 mg
Clintonginty says:
prednisone sale prednisone without dr prescription – cost of prednisone in canada
Clintonginty says:
how to get zithromax over the counter generic zithromax – where can i get zithromax over the counter
Clintonginty says:
plaquenil cost in canada plaquenil for sale canada – generic hydroxychloroquine
Clintonginty says:
cheap generic prednisone buy prednisone – prednisone 5 mg tablet cost
DavidseN says:
viagra click here info buy cialis generic cialis tadalafil 20mg
DavidseN says:
dapoxetine cialis generic cialis 20 mg
Jerryalali says:
stromectol 6 mg tablet buy stromectol online uk
Jerryalali says:
ivermectin for sale stromectol south africa
AndreDroro says:
blue pill viagra buy viagra professional
AndreDroro says:
how does viagra work viagra 100mg
AndreDroro says:
stromectol oral ivermectin generic cream
AndreDroro says:
plaquenil brand name cost plaquenil for fibromyalgia
AndreDroro says:
cialis vs viagra buy generic viagra online
AndreDroro says:
viagra side effects viagra side effects
AndreDroro says:
buy viagra online without a prescription real viagra without a doctor prescription
AndreDroro says:
plaquenil 200 mg canada hydroxychloroquine nz
AndreDroro says:
cost of plaquenil uk plaquenil 100mg
DavidChich says:
2000 mg valtrex daily valtrex – buy valtrex online
DavidChich says:
wellbutrin prescription mexico wellbutrin xl – 689 wellbutrin
DavidChich says:
wellbutrin generic online generic wellbutrin – how to get wellbutrin in australia
DavidChich says:
90 mcg ventolin ventolin generic – ventolin price us
DavidChich says:
tamoxifen mechanism of action nolvadex – effexor and tamoxifen
DavidChich says:
valtrex without presciption valtrex – valtrex prescription australia
DavidChich says:
ventolin hfa 90 mcg ventolin over the counter – ventolin generic cost
DavidChich says:
wellbutrin 30 mg wellbutrin without prescription – wellbutrin where to buy
DavidChich says:
ventolin inhaler no prescription albuterol ventolin – ventolin 8g
DavidChich says:
tamoxifen vs raloxifene nolvadex – arimidex vs tamoxifen bodybuilding
Teowed says:
where can you buy propecia
Ashwed says:
atarax 25mg
Tedwed says:
disulfiram 250 mg tablet
Markwed says:
purchase stromectol
Kiawed says:
generic sildenafil 100mg
Wimwed says:
synthroid nz
Ugowed says:
buy generic viagra no prescription
DonaldMum says:
cipro cheap generic drugs from canada cheap online generic drugs nolvadex buy generic drugs online
Ugowed says:
generic lasix
Zakwed says:
paxil capsule
Wimwed says:
cialis 2.5
DonaldMum says:
zithromax generic ed pills from canada cheap generic ed pills cipro cheap generic drugs from canada
Carlwed says:
non prescription viagra
Carlwed says:
aurogra 100 mg
Lisawed says:
viagra mail order
Boowed says:
chloroquine australia
Teowed says:
fluoxetine 60 mg
DonaldMum says:
stromectol cheap generic drugs from canada generic ed pills from canada clomid generic drugs online
DonaldMum says:
cipro generic pills generic ed pills from canada cytotec generic drugs online
Kiawed says:
where to buy gabapentin online
Ashwed says:
albuterol sulfate inhaler
Yonwed says:
where to buy strattera
Paulwed says:
viagra europe
Tedwed says:
how much is cymbalta 30 mg
Amywed says:
canadian viagra prescription
Amywed says:
ivermectin 2%
Marywed says:
elavil medication
Ashwed says:
where to buy doxycycline in australia
Judywed says:
fluoxetine capsules 10 mg
Lisawed says:
tadalafil 5mg daily use
Richardlalty says:
https://iverstrom24.online/# stromectol how to take
Tedwed says:
sale cialis
Judywed says:
tadalafil canada online
Richardlalty says:
http://ciatad24.online/# cialis medication
Teowed says:
sildenafil otc usa
Marywed says:
zovirax 5g price
Paulwed says:
buy online cialis generic
Ugowed says:
cialis us pharmacy online
Richardlalty says:
https://viasild24.online/# best time to take viagra
Yonwed says:
zovirax generic india
Wimwed says:
where to buy sildenafil 50mg
Richardlalty says:
https://iverstrom24.com/# stromectol how to take
Boowed says:
cymbalta online pharmacy price
Carlwed says:
dexona 0.5 mg
Zakwed says:
hydroxychloroquine 2
Amywed says:
sildenafil 50mg coupon
Markwed says:
cheap sildenafil 20mg
Zakwed says:
tadalafil 25mg
Boowed says:
order zoloft over the counter
Carlwed says:
ivermectin 3mg tab
Richardlalty says:
https://viasild24.com/# best time to take viagra
Wimwed says:
aurogra 100 prices
Ugowed says:
how much is cialis 20mg
Judywed says:
where can i get propecia
Teowed says:
stromectol for head lice
Marywed says:
cialis online us
Tedwed says:
tadalafil uk cheap
Yonwed says:
amoxicillin 500 mg mexico
Richardlalty says:
http://ciatad24.com/# 20mg cialis side effects
Ashwed says:
setraline purchase
Lisawed says:
generic malegra fxt
Richardlalty says:
https://viasild24.com/# best time to take viagra
Yonwed says:
buy generic tadalafil online
Zakwed says:
ivermectin lotion 0.5
Lisawed says:
stromectol canada
Kiawed says:
trazodone discount
Stevensek says:
https://baricitinibrx.com/ buy baricitinib
Stevensek says:
https://plaquenils.com/ generic plaquenil coupon
Tedwed says:
ivermectin 2%
Paulwed says:
cost of 10 mg tadalafil generic pills
Boowed says:
sildenafil cream in india
Wimwed says:
azithromycin cost in mexico
Stevensek says:
https://stromectols.com/ buy ivermectin
Stevensek says:
http://plaquenils.com/ hydroxychloroquine 700
Markwed says:
zovirax buy online australia
Stevensek says:
http://baricitinibrx.online/ where to buy baricitinib
Stevensek says:
https://baricitinibrx.com/ where to buy baricitinib
bonjur says:
Amazing! Its genuinely awesome post, I have got much clear idea about from this paragraph. Danette Lazare Janie
Ashwed says:
fluoxetine 60 mg cost
Ugowed says:
tadalafil tablets 20 mg price in india
Marywed says:
cymbalta prescription uk
Stevensek says:
https://stromectols.com/ stromectol 3 mg tablets price
Stevensek says:
http://baricitinibrx.com/ barikind
Nipple Orgasm says:
Looking forward to reading more. Great article.Much thanks again. Really Cool.
singapore secretarial fee says:
An intriguing discussion is worth comment.There’s no doubt that that you should publish more about this subject matter, it may not be a taboo subject butgenerally folks don’t talk about these issues. To thenext! Kind regards!!
Lisawed says:
stromectol otc
Yonwed says:
budesonide 3mg capsules coupon
Stevensek says:
http://bimatoprostrx.com/ bimatoprost buy
Stevensek says:
http://bimatoprostrx.com/ careprost bimatoprost for sale
realistic suction cup dildo says:
I really enjoy the blog post.Thanks Again. Fantastic.
Marywed says:
malegra 100 for sale
Zakwed says:
canada generic viagra price
Judywed says:
budesonide 6 mg
homemade wank toy says:
Thank you ever so for you blog. Fantastic.
Paulwed says:
stromectol cream
vibrating underwear says:
Really informative article post. Really Great.
Kiawed says:
best price for cymbalta 60 mg
girth sex toys says:
Great, thanks for sharing this blog post. Awesome.
nyc seo says:
Aw, this was a very nice post. Taking a few minutes and actual effort to produce a top notch articleÖ but what can I sayÖ I put things off a whole lot and don’t seem to get nearly anything done.
Stevensek says:
http://plaquenils.com/ plaquenil cost without insurance
Ghana news says:
A big thank you for your blog article.Thanks Again. Want more.
bitcoin revolution review says:
A round of applause for your blog article.Really thank you! Fantastic.
Boowed says:
wellbutrin 50 mg
Stevensek says:
http://baricitinibrx.online/ barilup
Stevensek says:
https://plaquenils.com/ hydroxychloroquine sulfate cost
Amywed says:
where can you buy propecia
MichaelHip says:
lrpgul https://stromectolr.com ivermectin pills canada
MichaelHip says:
mqrgdw https://stromectolr.com ivermectin uk coronavirus
Wimwed says:
sildenafil nz buy
wooden shoe rack says:
Say, you got a nice article.Much thanks again. Awesome.
Judywed says:
where to buy female viagra in india
Carlwed says:
viagra soft tablets
Zakwed says:
order tadalafil online canada
jigsaw says:
Say, you got a nice blog post.Really thank you! Want more.
Tedwed says:
where to get cialis in canada
foot fetish pics says:
Major thankies for the blog. Awesome.
Ugowed says:
canadian pharmacy viagra 100mg
MichaelHip says:
aixzrp https://stromectolr.com cost of ivermectin medicine
MichaelHip says:
vnpzyi https://stromectolr.com ivermectin 4 tablets price
Amywed says:
generic tadalafil 20mg uk
Boowed says:
generic cialis no prescription canada
Kiawed says:
canada pharmacy viagra
Kiawed says:
viagra generic australia
understanding finance says:
Awesome article post.Thanks Again.
MichaelHip says:
vrbdwn https://stromectolr.com stromectol tablet 3 mg
MichaelHip says:
ryxgnx https://stromectolr.com ivermectin 8 mg
Judywed says:
sildenafil over the counter canada
Carlwed says:
viagra low price
Ashwed says:
how to get tadalafil
Candles says:
Major thankies for the post.Really looking forward to read more. Great.
Yonwed says:
cheap cialis in canada
Wimwed says:
tadalafil 20mg from india
Paulwed says:
generic tadalafil cheap
Markwed says:
cialis 60 mg canada
Boowed says:
viagra generic coupon
Amywed says:
where to purchase cialis
MichaelHip says:
hydroxychloroquine 200 mg cost hydroxychloroquine plaquenil best price
lvrdsh
MichaelHip says:
plaquenil 100 mg buy plaquenil plaquenilsnw hydroxychloroquine 10 price
ndsqfj
오피스타 says:
Wow, great blog article.Really looking forward to read more. Will read on…
Ugowed says:
viagra 100mg tablet
Carlwed says:
buy sildenafil without prescription
Ashwed says:
sildenafil citrate australia
attorney at law near me says:
I could not resist commenting. Well written!Look into my blog … yqdnwx.com
Kiawed says:
order viagra canadian pharmacy
read more says:
Very good blog post.
Marywed says:
cialis without a prescription
Teowed says:
generic viagra in india online
Teowed says:
how can you get viagra online
Wholesale Plain White T Shirts China says:
Thanks so much for the article.Really thank you! Will read on…
Amywed says:
buy tadalafil us
Ashwed says:
viagra buying canada
https://www.gigsofsouthtexas.com/ says:
Your way of addressin this topic is both terrific and also motivating.
Wimwed says:
where can i buy generic cialis online
www.stlbouncehouse.com/party-rentals-st-louis/ says:
I like what you guys are usually up too. This sort of clever work and reporting!Keep up the great works guys I’ve included you guys to myown blogroll.
Judywed says:
generic viagra india
Kiawed says:
tadalafil buy online canada
Tedwed says:
cialis professional 20 mg
Zakwed says:
best cialis online
Markwed says:
cheap cialis canadian pharmacy
beneficios de espirulina says:
Very informative blog.Really thank you! Want more.
Paulwed says:
cialis online prescription uk
liquid silicone molding says:
Major thankies for the article.Thanks Again. Will read on…
DennisSpIty says:
Very nice style and wonderful content material , nothing at all else we need : D.
Ugowed says:
buy viagra online paypal
Lab Kesehatan says:
Really enjoyed this article.Really looking forward to read more. Will read on…
kumpulan situs slot online says:
Thanks-a-mundo for the blog post.Really thank you! Keep writing.
Wimwed says:
viagra 20 mg cost
Carlwed says:
viagra for sale online
Teowed says:
best price generic cialis 20 mg
Lisawed says:
can you buy cialis safely online
Ugowed says:
cialis tablets online
rotorazer says:
I cannot thank you enough for the article post.Really thank you! Really Great.
Markwed says:
viagra otc mexico
Geld blog says:
Really enjoyed this article post.Thanks Again. Will read on…
Boowed says:
cialis 20mg cost
Judywed says:
can you buy cialis over the counter australia
Kiawed says:
100mg cialis for sale
Lisawed says:
cheap generic cialis 60 mg
Marywed says:
where to buy real viagra online
elite power cbd reviews says:
Thanks a lot for the post.Much thanks again. Really Cool.
Tedwed says:
cialis medication cost
sleep guard plus scam says:
Very informative blog.Thanks Again. Fantastic.
Zakwed says:
how much is viagra 100mg
Marywed says:
cialis 120 mg
Ashwed says:
brand cialis canada
Paulwed says:
cheap generic viagra 100mg canada
Carlwed says:
generic cialis 2019
Teowed says:
can you buy generic viagra over the counter in canada
Jackwed says:
cialis online women
Evawed says:
low cost cialis
Kimwed says:
buy cialis online prescription
Markwed says:
generic cialis without prescription
Kimwed says:
cost of viagra 100mg in australia
Samwed says:
cialis 5mg price australia
Ivywed says:
tadalafil soft 20 mg
Nickwed says:
cialis black
Samwed says:
online pharmacy australia viagra
Wimwed says:
viagra online no script
Annawed says:
viagra online australia paypal
Ashwed says:
where can you buy viagra without a prescription
Suewed says:
how much is daily cialis
Janewed says:
cialis 10 mg tablet
Ivywed says:
online medication cialis
Jimwed says:
cialis in canada over the counter
Zakwed says:
can you buy cialis online from canada
Yonwed says:
buy viagra cialis
download lagu mp3 dinda jangan marah marah yeni inka says:
Thank you ever so for you blog article.Really thank you! Cool.
Jimwed says:
buy generic viagra from canada online
Suewed says:
how to buy cialis online in canada
Samwed says:
can i buy real viagra online
Annawed says:
cialis 25 mg price
Samwed says:
viagra cialis online
Miawed says:
cialis pharmacy price comparison
Evawed says:
where to buy cialis in canada
Annawed says:
sildenafil 100mg capsule
Evawed says:
canadian generic viagra 100mg
Kimwed says:
how to order generic cialis
Nickwed says:
generic viagra online from india
Judywed says:
where to buy viagra in south africa
Nickwed says:
buy viagra from mexico
Jackwed says:
buy cialis pills
Joewed says:
cialis daily prescription
Teowed says:
cialis soft gel caps
Jackwed says:
viagra 12.5 mg
Janewed says:
real viagra for sale
Miawed says:
viagra over the counter europe
Kiawed says:
buy cialis paypal
Carlwed says:
viagra/canada
Nickwed says:
buy brand cialis
Miawed says:
how do you get viagra
Paulwed says:
can i get viagra over the counter
Evawed says:
cialis viagra levitra
Suewed says:
tadalafil 30
carding cc shop says:
FRESHCC.RU – TRUSTED STORE CCV-DUMPS-BANKS-PAYPAL-ACCOUNTS
Samwed says:
where can you buy viagra for women
Nickwed says:
order generic cialis online
마타운 says:
Thanks a lot for the blog article.Much thanks again. Cool.
Marywed says:
synthroid 0.1 mcg
Jimwed says:
best retin a cream prescription
cryptobite says:
I am so grateful for your blog article.Thanks Again. Much obliged.
Ivywed says:
cheap over the counter viagra
Miawed says:
aurogra 100 for sale
Judywed says:
price of ivermectin liquid
Joewed says:
atenolol 50
Annawed says:
buy cialis online 20mg
Wimwed says:
generic cialis 2018 prices
Kimwed says:
tadalafil capsule
Miawed says:
sildenafil 50mg uk
Joewed says:
amoxicillin 625mg tab
Yonwed says:
amoxicillin generic over the counter
Zakwed says:
zestoretic generic
Jimwed says:
doxycycline purchase uk
Suewed says:
viagra sildenafil
Amywed says:
gabapentin 800
Janewed says:
accutane medicine singapore
Janewed says:
cialis online paypal
Evawed says:
nolvadex price
Marywed says:
stromectol tablets uk
Kimwed says:
finpecia tablet price in india
Jimwed says:
purchase furosemide online
Suewed says:
generic sildenafil 20 mg cost
to get more information says:
Oh my goodness! Awesome article dude! Thank you so much, However I am having issues with your RSS. I don’t know why I can’t join it. Is there anyone else getting similar RSS problems? Anybody who knows the solution will you kindly respond? Thanx!!
Samwed says:
1 sildenafil
Ivywed says:
disulfiram 500 mg tablets online
Samwed says:
celexa 100mg
Jimwed says:
best viagra pills uk
Ugowed says:
augmentin 375 cost
just juice mp3 download says:
Major thanks for the article post.Much thanks again. Great.
Suewed says:
furosemide lasix 20 mg
Joewed says:
where to buy amoxicillin pharmacy
Joewed says:
antabuse prescription cost
Kimwed says:
finpecia tablets online
gaji satpol pp says:
Really appreciate you sharing this blog post.Really thank you! Awesome.
Jimwed says:
tadalafil 20mg online canada
Nickwed says:
cymbalta 60mg
Ivywed says:
how to get finasteride prescription
Janewed says:
kamagra oral jelly suppliers
Miawed says:
sildenafil 100mg tablets for sale
Ivywed says:
best modafinil brand
Kiawed says:
quinolex
Ivywed says:
purchase antabuse online
Lisawed says:
prednisolone tablets uk
Suewed says:
tadalafil 7.5 mg
Ivywed says:
order viagra 50 mg
Samwed says:
buy sildenafil tablets
Nickwed says:
buy viagra online canada
Suewed says:
deltasone 25mg from canada
Ugowed says:
tadalafil mexico price
Jimwed says:
25 mg viagra
Evawed says:
celexa tablets 20 mg
cochroach dreams says:
Looking forward to reading more. Great blog post. Really Cool.
Jackwed says:
modafinil online australia
Carlwed says:
how to buy provigil online
출장안마 says:
Thanks-a-mundo for the blog.Thanks Again. Fantastic.
Kimwed says:
sildenafil 100mg price in india
Kimwed says:
ivermectin medicine
Amywed says:
buy allopurinol tablets
Jimwed says:
15 mg cialis
Miawed says:
finpecia tablet
Samwed says:
atenolol cost
Jackwed says:
antabuse cost in india
Yonwed says:
cialis buy online canada
Annawed says:
wellbutrin 450 tablet
Miawed says:
cialis 40 mg generic
Miawed says:
cialis cost comparison
Joewed says:
[url=https://tadalafilxgeneric.com/]how to get tadalafil[/url]
Joewed says:
lisinopril 2.5 cost
air cooler malaysia says:
This is one awesome article.Really thank you!
Boowed says:
stromectol 12mg online
Annawed says:
sildenafil tablets 100mg india
Jackwed says:
accutane 20mg
Evawed says:
[url=https://sildenafilgenericp.com/]sildenafil 25 mg india[/url]
Teowed says:
zitromax
Samwed says:
ivermectin stromectol
Janewed says:
seroquel 200 mg tab
Marywed says:
sildenafil coupon 100mg
Evawed says:
clomid prices
Jackwed says:
sildenafil comparison
Janewed says:
amoxicillin 850
Nickwed says:
buy tadalafil 20 mg from india
Annawed says:
cialis india price
Jackwed says:
ivermectin cost
Janewed says:
furosemide no prescription
Wimwed says:
buy stromectol canada
Ashwed says:
ivermectin 1% cream generic
Evawed says:
nolvadex 20
Zakwed says:
can i buy over the counter viagra
Nickwed says:
zestoretic tabs
Teowed says:
generic viagra online pharmacy usa
Jimwed says:
buy ivermectin
Jackwed says:
sildenafil otc usa
Jackwed says:
amoxicillin 500mg pharmacy price
Evawed says:
finpecia online
Suewed says:
buy cialis 40 mg
Annawed says:
order generic finasteride
Nickwed says:
amoxil 500mg antibiotics
Miawed says:
propecia for less
Lisawed says:
rx fluoxetine
Kimwed says:
viagra fast shipping canada
Kimwed says:
real female viagra
Janewed says:
nolvadex 20mg tablets
Miawed says:
seroquel sleep
Miawed says:
lisinopril brand name in usa
Tedwed says:
cialis generic in us
Ivywed says:
buy generic viagra with paypal
Judywed says:
cheap daily cialis online
Nickwed says:
tadalafil gel
Teowed says:
buy viagra tablet online india
Joewed says:
buy cialis with paypal
Annawed says:
viagra super active plus
Ugowed says:
viagra price per pill
Ivywed says:
buy cialis online cheap
Suewed says:
viagra professional pfizer
Kimwed says:
generic cialis soft gel
Amywed says:
viagra australia buy
Joewed says:
cost of cialis 5mg in canada
Markwed says:
tadalafil daily cost
Joewed says:
sildenafil 50 mg buy online price
Annawed says:
cheap viagra 100mg tablets
Paulwed says:
where to buy viagra online without prescription
Suewed says:
viagra 50 mg tablet price
Janewed says:
buy viagra nyc
Tedwed says:
tadalafil 20mg online canada
Jimwed says:
buy cialis uk paypal
Jackwed says:
cheapest price for sildenafil 20 mg
Kiawed says:
cheapest tadalafil 20mg india
Samwed says:
generic viagra buy uk
Ashwed says:
cialis 10mg
Paulwed says:
cialis online purchase in india
Kimwed says:
buy viagra discount
Joewed says:
order real viagra
Zakwed says:
buy viagra pharmacy uk
Judywed says:
generic cialis
Suewed says:
viagra drugstore
Nickwed says:
where can i get cialis in singapore
Ivywed says:
generic viagra online pharmacy
Annawed says:
can you buy cialis over the counter in mexico
Boowed says:
tadalafil tablets 20 mg india
Kimwed says:
where can you get generic viagra
Janewed says:
online viagra best
Markwed says:
tadalafil best price 40 mg
Jimwed says:
cheap viagra india online
Carlwed says:
sildenafil 50mg brand name
Samwed says:
cyalis
Kiawed says:
generic cialis 20 mg from india
Suewed says:
benicar cost comparison
Ivywed says:
valtrex 500mg price in usa
Wimwed says:
amoxicillin pill
Janewed says:
stromectol tablets
Janewed says:
benecar
Joewed says:
buy tadalafil online no prescription
Ugowed says:
how to get modafinil in usa
Samwed says:
where can i buy amoxil
Suewed says:
order clonidine
Samwed says:
amoxicillin canada
Evawed says:
stromectol ivermectin tablets
Jackwed says:
sildenafil 100 mg tablets coupon
Janewed says:
buy generic modafinil online
Janewed says:
ivermectin 2%
Jackwed says:
viagra online price
Evawed says:
ivermectin uk coronavirus
Ivywed says:
ivermectin buy
Evawed says:
flagyl pills for sale
Miawed says:
avodart no prescription
Jackwed says:
10 mg tadalafil daily
Miawed says:
propecia drugstore
Tedwed says:
order propecia online uk
Kimwed says:
canadian price for cialis
Jackwed says:
how much is sildenafil 25 mg
Jimwed says:
generic cialis tablets
Jimwed says:
where to buy sildenafil in canada
Kimwed says:
viagra 25mg price
Evawed says:
reddit canadian pharmacy
Yonwed says:
cymbalta 382
Jimwed says:
sildenafil 20 mg discount coupon
Marywed says:
neurontin 600 mg
Joewed says:
viagra capsule online
Evawed says:
average cost of generic valtrex
Lisawed says:
metformin price australia
Annawed says:
benicar from canada
Nickwed says:
ivermectin 80 mg
Annawed says:
order avodart online
Joewed says:
where can i buy cialis online in canada
Jackwed says:
cialis tablets
Nickwed says:
buy zoloft online cheap
Joewed says:
sildenafil 20 mg cost
Wimwed says:
hydroxychloroquine sulfate 200mg
Ivywed says:
lopressor 15 mg
Annawed says:
avana 2
Ivywed says:
cozaar price canada
Boowed says:
buy stromectol
Evawed says:
celebrex celecoxib
Jimwed says:
order viagra online with paypal
Ugowed says:
cephalexin medication
Nickwed says:
ivermectin lice
Kiawed says:
cialis india online pharmacy
Janewed says:
baclofen otc 10mg
Paulwed says:
ventolin 2mg
Jimwed says:
sildenafil tablets 150mg
Evawed says:
flomax singapore
Joewed says:
real viagra pills online
Marywed says:
stromectol covid 19
Jackwed says:
generic tadalafil from canada
Markwed says:
cytotec para abortar
Samwed says:
buy avodart online
Ashwed says:
cytotec 200 canada
Miawed says:
stromectol price us
Samwed says:
prednisolone 5mg pharmacy
Nickwed says:
order stromectol
Ugowed says:
zoloft india
Jackwed says:
where can i buy sildenafil 100mg
Nickwed says:
elimite purchase
Annawed says:
buy metformin india
Zakwed says:
stromectol 0.5 mg
Ashwed says:
nolvadex 10mg tablets price
Ivywed says:
penicillin amoxicillin
Jimwed says:
cialis by mail
Kimwed says:
buy viagra pills canada
Teowed says:
flomax prices
Janewed says:
ivermectin 0.5% lotion
Joewed says:
cialis 5mg online australia
Kimwed says:
can you buy viagra online in canada
Ivywed says:
buy valacyclovir without a prescription
Kimwed says:
sildenafil 48 tabs
Evawed says:
albuterol no rx
Nickwed says:
[url=https://ivermectingtab.com/]ivermectin 0.5% brand name[/url]
Miawed says:
buy provigil 100mg online
Yonwed says:
mexican pharmacy weight loss
Miawed says:
ivermectin for humans
Judywed says:
glucophage 850 mg tab
Kiawed says:
buy cheap tadalafil online
Suewed says:
best price malegra fxt
mukachevo.net says:
Trực Tiếp Soccer Việt Nam Vs Lebanon. Xem Truc Tiep Bong Da. Futsal Việt NamthevangtvNếu cứ nghịch như cách vừa đè bẹp Everton tới 3-1 bên trên sân khách
glavnoe.ua says:
An intriguing discussion is definitely worth comment. I think that you should write more about this subject, it might not be a taboo subject but generally people don’t discuss these issues. To the next! Best wishes!!
Amywed says:
biaxin filmtabs
Miawed says:
ivermectin tablets
Annawed says:
ivermectin for covid
Kimwed says:
purchase cialis in mexico
Joewed says:
seroquel tabs
Jimwed says:
budesonide 200
Samwed says:
malegra dxt
Joewed says:
buspar price uk
Miawed says:
sildenafil 50 mg
Annawed says:
tadalafil 40 mg uk
JimHoM says:
Go to 1this website to see how to get free diamonds on cooking fever
gh45kkm
This game is more fun when you have as many gems as you want.If you enjoy mobile games like this you ought to check out the guide above
Carlwed says:
atarax 10mg tablet price
Samwed says:
antabuse online cheap
Teowed says:
no prescription doxycycline
Judywed says:
retino cream price
Miawed says:
buy priligy india
Joewed says:
genuine cialis canada
Marywed says:
fluoxetine cost nz
Ashwed says:
generic buspar price
Suewed says:
tadalafil singapore
Ugowed says:
bupropion 150mg pill
Nickwed says:
30 mg tadalafil
Jimwed says:
otc female viagra
Janewed says:
cialis 20 mg
Janewed says:
aurogra 100mg tablets
Evawed says:
arimidex price canada
Lisawed says:
rx tadalafil tablets
Markwed says:
where can you buy cytotec over the counter
Kimwed says:
tadalafil 20 mg usa
Ivywed says:
generic viagra soft tabs
Samwed says:
ivermectin uk
Suewed says:
online pharmacy cialis 20mg
Annawed says:
cheapest tadalafil prices
Nickwed says:
where can i buy tretinoin
Zakwed says:
viagra pills uk
Jimwed says:
tadalafil order online
Nickwed says:
cialis online sicuro
Miawed says:
where can you buy viagra online safely
Kimwed says:
100 mg sildenafil cost
Joewed says:
cialis for sale
Boowed says:
us online pharmacy cialis
Annawed says:
australia viagra prescription
Zakwed says:
trazodone 807
Jackwed says:
tadalafil soft tablets
Kimwed says:
cialis 2.5 mg online
Aaron Monroe says:
tadalafil generic online cialis and depression alcohol and cialis
Wimwed says:
5343 viagra
Ugowed says:
rx gabapentin
Ivywed says:
tretinoin 1 gel
Nickwed says:
cialis gel uk
Jimwed says:
can i buy viagra over the counter in canada
Evawed says:
where to get female viagra australia
Annawed says:
buy tadalafil online usa
Jackwed says:
sildenafil without prescription from canada
Evawed says:
cheapest cialis 20mg online
Renita Landino says:
cialis review cialis 20mg usa daily cialis 5mg
James Brown says:
Things i have generally told people is that when looking for a good on the net electronics retail store, there are a few elements that you have to think about. First and foremost, you need to make sure to discover a reputable as well as reliable store that has obtained great evaluations and scores from other individuals and market sector people. This will make sure that you are handling a well-known store that gives good assistance and help to their patrons. Thanks for sharing your thinking on this site.
Suewed says:
tadalafil 20mg for sale
Jackwed says:
plaquenil generic 200 mg coupon
Kiawed says:
brand name wellbutrin cost
Janewed says:
abilify canadian pharmacy
Jackwed says:
buspar prescription cost
Ivywed says:
abilify cost with insurance
Carlwed says:
arimidex cost uk
Boowed says:
tadalafil 100mg online
Judywed says:
sildenafil nz
Evawed says:
best prices for cialis
Miawed says:
sildenafil tablet 50mg
Ashwed says:
where can i buy cheap cialis
Miawed says:
canada pharmacy cialis
Joewed says:
sildenafil 50mg tablets coupon
Teowed says:
cialis 40 mg online
Suewed says:
where to buy viagra over the counter in canada
Annawed says:
cialis prescription coupon
Lisawed says:
cheapest price for cialis 5mg
Joewed says:
viagra for men
Kimwed says:
ajanta kamagra oral jelly
Samwed says:
how to purchase viagra in uk
Boowed says:
arimidex 1mg
Amywed says:
aurogra 100 for sale
Tedwed says:
generic tadalafil canada
Jimwed says:
chloroquine 150 mg
Janewed says:
buy cialis without prescription
Evawed says:
trazodone 100 mg pill
Jimwed says:
viagra 10 mg tablet
Joewed says:
advair 10 coupon
Ivywed says:
buy genuine viagra online canada
Jimwed says:
sildenafil 20mg online prescription
Ivywed says:
tadalafil cheap canada
Nickwed says:
cialis online canada
Ugowed says:
viagra sildenafil citrate
Jackwed says:
seroquel online usa
Jackwed says:
tadalafil 100
Amywed says:
motrin 400 over the counter
Suewed says:
finasteride 1mg coupon
Wimwed says:
sildenafil 100mg uk paypal
Markwed says:
can i buy hydrochlorothiazide over the counter
Marywed says:
cialis price europe
Samwed says:
dapoxetine order online
Jimwed says:
generic propecia available in us
Miawed says:
hydroxychloroquine 500 mg
Samwed says:
cheap effexor xr
Paulwed says:
sildenafil 1 pill
Miawed says:
where to buy sildenafil online
Nickwed says:
sildenafil tablets for sale
Ivywed says:
stromectol where to buy
Miawed says:
ivermectin where to buy
Yonwed says:
dapoxetine online india
Judywed says:
doxycycline discount
Annawed says:
levitracanada.com
Jasper Luckett says:
viagra sublingual stronghealthstore sildenafil citrate women on viagra
Evawed says:
how to buy doxycycline online
Jackwed says:
cheap prices for cialis
Ivywed says:
effexor 450 mg
Janewed says:
sildenafil 200mg
Samwed says:
tretinoin 0.05 cream
Trending Simple says:
iesns xtf otoi jdkt xwds kli fivmbw TrendingSimple
Peter Coffey says:
viagra over counter marley generics viagra sildenafil mexico pharmacy
Amywed says:
buy generic tadalafil online uk
Carlwed says:
cost of dapoxetine
Janewed says:
metformin 100 mg
click here says:
What a information of un-ambiguity and preserveness of preciousknowledge concerning unexpected emotions.
Patrick Eddington says:
You have made some decent points there. I looked on the internet for additional information about the issue and found most
individuals will go along with your views on this web site.
Miawed says:
proscar uk
Jacquline Jackson says:
canadian viagra sildenafil india pharmacy viagra pfizer
Anthony Carpenter says:
Hey there would you mind letting me know
which hosting company you’re utilizing? I’ve loaded your blog in 3 completely
different internet browsers and I must say
this blog loads a lot faster then most. Can you recommend
a good hosting provider at a reasonable price? Many thanks,
I appreciate it!
Yonwed says:
buy generic vardenafil
Paulwed says:
6 mg tadalafil
Nickwed says:
average cost of gabapentin
Samwed says:
sildenafil soft tablets
Kimwed says:
proscar tablets 1mg
Annawed says:
cialis 2.5
Evawed says:
tamoxifen 10 mg
Suewed says:
lopressor tab 50mg
Samwed says:
paxil for ocd
Janewed says:
azithromycin purchase
Ashwed says:
tadalafil 20 mg price canada
Jackwed says:
augmentin 675 mg
Evawed says:
tadalafil india online
Kimwed says:
arimidex buy usa
Evawed says:
buy cytotec online fast delivery
Nickwed says:
zovirax ointment over the counter
view says:
Nice replies in return of this issue with solid arguments and explaining everything about that.
Joewed says:
best clomid
Jimwed says:
cheap viagra online fast shipping
click for more says:
Hello There. I discovered your blog the use of msn. That is a really neatly written article. I’ll be sure to bookmark it and come back to read extra of your helpful information. Thanks for the post. I will definitely return.
Suewed says:
where to buy nexium cheap
Jimwed says:
order proscar online
Miawed says:
medication neurontin 300 mg
Joewed says:
generic sildenafil online
Jackwed says:
cheap sildenafil canada
Suewed says:
cleocin cream acne
Jimwed says:
levitra 2.5 mg
Suewed says:
dapoxetine tablets
Wimwed says:
prozac 60 mg price
Joewed says:
nexium 40 usa
Nickwed says:
nexium generic version
Marywed says:
where to buy tamoxifen in singapore
Kimwed says:
cialis 20 mg buy online uk
Annawed says:
atarax
Judywed says:
stromectol 3 mg tablets price
Ivywed says:
paxil for premature ejaculation
Kiawed says:
cheap sildenafil canada
Samwed says:
cialis 60
Ivywed says:
sildenafil 110 mg
Janewed says:
amoxicillin 20mg
Janewed says:
generic viagra mexico pharmacy
Annawed says:
medication viagra online
Kimwed says:
chloroquine price canada
webdataparsing.com/articles/new-york-restaurants says:
A fascinating discussion is definitely worth comment. I think that you need to publish more on this topic, it might not be a taboo subject but generally folks don’t talk about such topics. To the next! Kind regards!!
Jackwed says:
tadalafil 12mg
Kimwed says:
buying atarax online
Nickwed says:
cheapest tadalafil cost in usa
Zakwed says:
stromectol 6 mg dosage
Kiawed says:
metformin 200 mg
Evawed says:
tadalafil 22 mg
Paulwed says:
sildenafil generic prescription
Jimwed says:
[url=http://tadalafilam.com/]generic cialis tadalafil[/url]
Samwed says:
cozaar 75 mg
Shirley Asselin says:
cialis 10mg generic walgreens cialis prices cialis 1000 mg
Suewed says:
gabapentin 600mg
Roy Isaia says:
tadalafil troche cialis pharmacy coupon buy cialis
Аррогантный says:
Аррогантный
Dorothy Lawley says:
These are genuinely fantastic ideas in about blogging. You have touched some
good points here. Any way keep up wrinting.
Zakwed says:
buy metformin without prescription
Ivywed says:
malegra 200
Janewed says:
generic tamoxifen
Lisawed says:
arimidex estrogen blocker
Teowed says:
canadian 5mg tadalafil online
Judywed says:
cialis tablets purchase
Ivywed says:
sildenafil over counter
Nickwed says:
viagra online no rx
Samwed says:
buy ditropan
Annawed says:
viagra daily use
Joewed says:
cheap generic cialis 20mg
Markwed says:
cheap sildenafil pills
Joewed says:
albenza tab 200mg
Annawed says:
cost of tadalafil 20 mg
Ivywed says:
buy viagra usa online
Miawed says:
get viagra
Jackwed says:
sildenafil buy usa
Janewed says:
safe online viagra
Boowed says:
buy genuine viagra online uk
Janewed says:
price of viagra per pill
Samwed says:
viagra over the counter in usa
Ashwed says:
buy motilium us
Kiawed says:
online pharmacy nz cialis
Kimwed says:
ivermectin 0.1 uk
Jackwed says:
25 mg tadalafil
Amywed says:
canadian drugstore cialis
Jimwed says:
cheap stromectol
Annawed says:
cialis 10mg price canada
Wimwed says:
where to buy ivermectin
aabbx.store says:
что значит дед инсайд
Jimwed says:
ivermectin online
Suewed says:
generic cialis online pharmacy
Suewed says:
buy viagra with mastercard
Carlwed says:
buy sildenafil without prescription
Jackwed says:
buy viagra new zealand
Ashwed says:
plavix generic price comparison
Nickwed says:
buy cialis online with prescription
Jackwed says:
ivermectin 5ml
Teowed says:
where can i buy cialis online in canada
Evawed says:
viagra online prescription
aabbx.store says:
гуль дед инсайд
Joewed says:
otc female viagra
aabbx.store says:
Dead-Inside
aabbx.store says:
Признаки Dead Inside
aabbx.store says:
Дед Инсайд
Evawed says:
cialis tablets 20mg for sale
aabbx.store says:
Dead-Inside
Suewed says:
prescription viagra cheap
Kimwed says:
stromectol over the counter
aabbx.store says:
гуль дед инсайд
Evawed says:
buy viagra paypal online
aabbx.store says:
я дед внутри
Joewed says:
cost of generic tadalafil
Ivywed says:
canada rx cialis
Carlwed says:
viagra 100mg online buy india
Joewed says:
buy cialis online south africa
Wimwed says:
stromectol price us
Ivywed says:
ed chewables
Miawed says:
purchase ivermectin
Miawed says:
australia online pharmacy free shipping
Samwed says:
generic viagra online free shipping
Lloyd Jones says:
tadalafil tablets 20mg generic tadalafil pills tadalafil generico
Tedwed says:
cialis generic price comparison
Brenda Alvarado says:
It’s appropriate time to make some plans for the future and it’s time to be happy.
I’ve read this post and if I could I want to suggest you few interesting things or advice.
Maybe you could write next articles referring to this article.
I wish to read even more things about it!
Kiawed says:
buy cialis online us pharmacy
Marywed says:
20mg cialis daily
Janewed says:
tadalafil online paypal
Boowed says:
viagra europe over the counter
Kimwed says:
india ivermectin
Evawed says:
viagra cost in australia
สล็อต888 says:
Awesome blog post.Much thanks again.
Jackwed says:
generic viagra in india
Ivywed says:
cialis buy
Henry Smith says:
free trial cialis maxim peptide tadalafil cialis manufacturer coupon
Samwed says:
tadalafil tablets 20 mg online
Lisawed says:
cialis 20 g
Suewed says:
tadalafil coupon discount
Paulwed says:
generic viagra capsules
Jimwed says:
where can i buy stromectol
Jimwed says:
ivermectin for sale
Annawed says:
can i buy cialis over the counter in canada
Kimwed says:
stromectol uk
Joewed says:
cialis tadalafil 20mg
Samwed says:
cialis 20mg price australia
Samwed says:
viagra pricing
Nickwed says:
cost of 5 mg tadalafil pills
Joewed says:
cialis online cost
Nickwed says:
stromectol for humans
Janewed says:
cost of ivermectin medicine
Ugowed says:
ivermectin 5ml
Janewed says:
buy female viagra uk online
Annawed says:
stromectol ivermectin buy
Ivywed says:
topamax 100
Annawed says:
cialis buy cheap
Evawed says:
yasmin pill pharmacy
Nickwed says:
hydrochlorothiazide 15 mg
Janewed says:
diclofenac prescription uk
건마 says:
I really enjoy the blog post.Really thank you! Much obliged.
Nickwed says:
sildenafil 200mg price
blpppwxdc says:
я дед внутри
lbxpnuabt says:
гуль дед инсайд
llucvfoeq says:
что значит дед инсайд
lghzovuvj says:
Признаки Dead Inside
Carlwed says:
voltaren gel 50 mg
Carlwed says:
how can i get sildenafil
fbhpzhyta says:
гуль дед инсайд
Jackwed says:
generic cialis 10mg
dkhdnpyua says:
Признаки Dead Inside
Suewed says:
buy cheap generic viagra uk
ecstyojjl says:
мертвый внутри
Amywed says:
ivermectin 0.1
sknfmkjqk says:
Дед Инсайд
Kimwed says:
ivermectin where to buy
Joewed says:
can you buy viagra over the counter in usa
Olympian Water Testing says:
I really liked your article.Really looking forward to read more. Really Great.
Judywed says:
cialis pharmacy online uk
Miawed says:
cialis 10mg price in india
Lisawed says:
cialis online pharmacy us
Wimwed says:
stromectol nz
Jackwed says:
daily cialis price
Heather Smith says:
Wow! This blog looks just like my old one!
It’s on a entirely different topic but it has pretty much
the same page layout and design. Superb choice of colors!
Jimwed says:
stromectol canada
Samantha Moin says:
walmart viagra price 100mg sildenafil price men viagra
Kiawed says:
cost cialis canada
Miawed says:
estrace
건마 says:
I really enjoy the blog post.Thanks Again. Keep writing.
Kimwed says:
cialis online pharmacy canada
Annawed says:
generic viagra otc
Suewed says:
viagra to buy online
Jimwed says:
cialis purchase
Nickwed says:
buy cialis online australia
Evawed says:
order tadalafil online
Janewed says:
cialis low price
Paulwed says:
brand viagra canadian pharmacy
article generator online says:
After exploring a number of the articles on your web site, I truly
like your technique of blogging. I book marked it to my bookmark site list and will be checking back in the near future.
Please check out my website as well and let me know what you think.
tusxezcnx says:
Признаки Dead Inside
csutceota says:
мертвый внутри
kliruvfut says:
Признаки Dead Inside
ganmmdpgt says:
Признаки Dead Inside
Boowed says:
cialis free shipping
wthbzjfhs says:
Признаки Dead Inside
qwaqyqlzi says:
Признаки Dead Inside
syxzbhawa says:
дед инсайд
Zakwed says:
cialis without a doctor
vxovytzxb says:
мертвый внутри
Evawed says:
[url=http://ivermectiniv.online/]stromectol generic[/url]
uzayzcavw says:
что значит дед инсайд
Suewed says:
cialis for daily use coupon
plcdaonez says:
Признаки Dead Inside
odevkeqly says:
мертвый внутри
Jackwed says:
tadalafil 24 mg
nwlqwgbon says:
Дед Инсайд
yvbboeuvu says:
Признаки Dead Inside
vopwtwvdq says:
мертвый внутри
Samwed says:
generic viagra usa
uzzawom says:
https://clck.ru/amCCm
Markwed says:
buy oral ivermectin
Douglas Hill says:
azithromycin antibiotic class azithromycin buy azithromycin antibiotic class
Arlene Valdez says:
Thanks for these tips. One thing I also believe is the fact that credit cards featuring a 0 rate often entice consumers along with zero interest rate, instant authorization and easy on the net balance transfers, however beware of the top factor that is going to void that 0 easy neighborhood annual percentage rate and throw anybody out into the poor house quickly.
Billie Thompson says:
azithromycin uses azithromycin tablets zithromax 250 mg
Samwed says:
where can you buy viagra over the counter in australia
Ashwed says:
ivermectin 10 mg
Joewed says:
real viagra for sale canada
Janewed says:
female viagra pills uk
Zakwed says:
can you buy viagra online
Janewed says:
viagra online pills
Automatedarticlewriter.Xyz says:
I have fun with, cause I found just what I was having a look for.
You have ended my four day lengthy hunt! God Bless you man. Have a nice day.
Bye
articlecontentcreator.xyz says:
I have been exploring for a little bit for any high quality articles or weblog posts in this kind of area .
Exploring in Yahoo I at last stumbled upon this site.
Studying this info So i’m satisfied to express that I’ve an incredibly good uncanny feeling I discovered just what I needed.
I most no doubt will make certain to do not fail to remember this website and provides it
a look on a relentless basis.
Ivywed says:
viagra prescription price
Janewed says:
keflex 250
seo article generator says:
I was wondering if you ever considered changing the structure of your blog?
Its very well written; I love what youve got to say.
But maybe you could a little more in the way of content so people could connect with it
better. Youve got an awful lot of text for only having 1 or 2 pictures.
Maybe you could space it out better?
Nickwed says:
antabuse pill over the counter
Marywed says:
viagra order online canada
Joewed says:
cialis eli lilly
Ugowed says:
stromectol 3 mg dosage
rickyspartyrentals.com/party-rentals-redlands/ says:
Hello.This article was extremely motivating, particularly since I was browsing for thoughts on this topic last week.
Suewed says:
buy viagra paypal uk
Ivywed says:
order bystolic 5 mg
Miawed says:
cialis 20mg tablets uk
Annawed says:
cialis cost in usa
Annawed says:
viagra cost
Samwed says:
how to buy cialis online safely
Nickwed says:
can i buy viagra over the counter in india
Evawed says:
where can i buy viagra otc
Tedwed says:
generic tadalafil 20 mg canada
Yonwed says:
how to viagra
Kimwed says:
stromectol for head lice
Jackwed says:
cialis 10mg coupon
duzy-rozmiar.pl says:
It’s going to be ending of mine day, except before finish I am reading
this fantastic article to improve my experience.
Janewed says:
buy real viagra online no prescription
Suewed says:
20mg cialis cheap
Janewed says:
generic viagra in usa
Janewed says:
generic viagra best online pharmacy
https://bastadejtingsidor.xyz says:
If you would like to obtain a great deal from this article then you have to apply such methods to your won weblog.
Roberta Reid says:
viagra discount coupon sildenafil capsule generic viagra online
Cynthia Williams says:
but anyone could then just give your friends in real life, ask
Amy Cook says:
whoah this blog is excellent i like studying your posts.Keep up the good work! You already know, a lot of persons are searching around for this info, you could aid them greatly.
Powiekszgo.pl says:
Good information. Lucky me I found your site by chance (stumbleupon).
I’ve book marked it for later!
Jimwed says:
stromectol for humans
Kiawed says:
pfizer viagra online pharmacy
Walter Golden says:
I just could not go away your website prior to suggesting that I extremely loved the usual information an individual provide to your visitors?
Is gonna be again continuously to check out new posts
Ivywed says:
sildenafil gel
geokgki says:
https://clck.ru/amCCm
David Williams says:
online viagra purchase generic sildenafil 100mg sildenafil 100mg capsule
Suewed says:
can you purchase viagra over the counter in mexico
mhyzvez says:
https://clck.ru/amCCm
oqtxrxa says:
https://clck.ru/amCCm
Amywed says:
canadian pharmacy generic viagra
sdqcavq says:
https://clck.ru/amCCm
Miawed says:
viagra 130 mg
yltxqgm says:
https://clck.ru/amCCm
dbvvdgd says:
https://clck.ru/amCCm
Carlwed says:
cialis pills sale
Markwed says:
cialis uk 20mg
oljkqrx says:
https://clck.ru/amCCm
slot says:
Thanks-a-mundo for the article post.Really thank you! Great.
johbwye says:
https://clck.ru/amCCm
Kimwed says:
ivermectin 3 mg dose
Joewed says:
buy viagra over the counter nz
pzofuhy says:
https://clck.ru/amCCm
yuqfdwi says:
https://clck.ru/amCCm
pzmnoxw says:
https://clck.ru/amCCm
Boowed says:
sildenafil 50 mg price
Evawed says:
generic cialis lowest price
Annawed says:
viagra 20mg price
Ivywed says:
india viagra price
Kimwed says:
stromectol cream
ekvdjhl says:
https://clck.ru/amCCm
Teowed says:
cialis sale australia
wdxfkii says:
https://clck.ru/amCCm
Palm Beach Roof Cleaning says:
I don’t even know how I ended up here, but I thought this post was great. I do not know who you are but definitely you’re going to a famous blogger if you aren’t already 😉 Cheers!
lrxeupl says:
https://clck.ru/amCCm
Jackwed says:
discount generic tadalafil
jqfiuhb says:
https://clck.ru/amCCm
xcrkakb says:
https://clck.ru/amCCm
lebkgiu says:
https://clck.ru/amCCm
Evawed says:
purchase ivermectin
tmmhyya says:
https://clck.ru/amCCm
Evawed says:
canadian generic viagra 100mg
click this site says:
Looking forward to reading more. Great post.Thanks Again. Want more.
eaqdftp says:
https://clck.ru/amCCm
hlybmii says:
https://clck.ru/amCCm
Kimwed says:
stromectol coronavirus
xqyslek says:
https://clck.ru/amCCm
jzqhbov says:
https://clck.ru/amCCm
Judywed says:
amitriptyline 25g
https://swdao.org/ says:
Nancy was pleased that she ran a tight shipwreck.
kfgbbrn says:
https://clck.ru/amCCm
xhbpogz says:
https://clck.ru/amCCm
Boowed says:
medicine cialis tablets
ffitlhs says:
https://clck.ru/amCCm
Nickwed says:
viagra 75 mg
nbcibpn says:
https://clck.ru/amCCm
yuaftto says:
https://clck.ru/amCCm
bitcoinnettikasinot.xyz says:
Hi, i think that i saw you visited my blog thus i came to “return the favor”.I am trying
to find things to enhance my site!I suppose its ok to use a few of your ideas!!
yec keto reviews says:
A big thank you for your blog post. Really Great.
fyshvte says:
https://clck.ru/amCCm
Jimwed says:
stromectol for humans
rtgazkn says:
https://clck.ru/amCCm
Yonwed says:
ivermectin 3 mg
curar piercing says:
I do believe all the ideas you have introduced in yourpost. They are very convincing and will definitelywork. Nonetheless, the posts are too quick for newbies. Could you please extend them a little from subsequent time?Thanks for the post.
Miawed says:
cialis 2.5 daily
Jimwed says:
ivermectin 6mg dosage
Miawed says:
digoxin 62.5mcg tabs
Jackwed says:
viagra canadian pharmacy generic
rhiedye says:
https://clck.ru/amCCm
cursos y masters online says:
Greetings! Very useful advice within this article!It’s the little changes which will make the biggest changes.Many thanks for sharing!
Kimwed says:
ivermectin cost canada
Jimwed says:
stromectol price usa
asgudtd says:
https://clck.ru/amCCm
Miawed says:
how to get a viagra prescription online
Samwed says:
cialis pills for sale in canada
krypto casino says:
Its like you learn my thoughts! You appear to know a lot approximately this, like you wrote the book in it or
something. I believe that you just could do with some % to drive the message home
a bit, but instead of that, this is excellent blog.
An excellent read. I’ll certainly be back.
opunhqx says:
https://clck.ru/amCCm
pmhebli says:
https://clck.ru/amCCm
Jimwed says:
ivermectin 3
slot888 says:
Thanks so much for the article.Really looking forward to read more. Really Cool.
Zakwed says:
stromectol online
Evawed says:
can you buy cialis without a prescription
eyzzcqe says:
https://clck.ru/amCCm
Evawed says:
india ivermectin
eazerah says:
https://clck.ru/amCCm
for more details says:
I want to make a withdrawal plavix and varicies Idon’t see a further debt haircut,” she told German daily DieWelt in an interview published in its Saturday edition.
ulimpan says:
https://clck.ru/amCCm
idsnier says:
https://clck.ru/amCCm
https://gowpcare.com/ says:
Perfectly indited content, Really enjoyed reading through.
Amywed says:
generic viagra 2018
tfrfkfb says:
https://clck.ru/amCCm
Jackwed says:
viagra 25 mg coupon
huge jelly dildo says:
Im obliged for the article post.Thanks Again. Cool.
Joewed says:
sildenafil best price uk
tfzoerc says:
https://clck.ru/amCCm
lmizwni says:
https://clck.ru/amCCm
bedstebitcoincasino.xyz says:
I’m really enjoying the theme/design of your weblog.
Do you ever run into any internet browser compatibility issues?
A couple of my blog readers have complained about my blog not working correctly in Explorer but looks great in Opera.
Do you have any recommendations to help fix this issue?
Ivywed says:
tadalafil daily cost
James Godbold says:
canadianmed cialis cialis from mexico tadalafil liquid
wkigxgl says:
https://clck.ru/amCCm
Randall Schmitt says:
generic sildenafil usa sildenafil rx coupon buying viagra
omdhykx says:
https://clck.ru/amCCm
Samwed says:
viagra over the counter us
jfvtstd says:
https://clck.ru/amCCm
Donald Ross says:
viagra pricing india viagra generic herbal viagra pills
William Marquez says:
cialis black 800mg generic tadalafil coupon tadalafil 6mg capsule
Jeffery Lheureux says:
tadalafil side effects tadalafil 5mg prices cialis black pills
bsgtqtt says:
https://clck.ru/amCCm
htgrpak says:
https://clck.ru/amCCm
Nickwed says:
cialis online prescription uk
ppbpbmm says:
https://clck.ru/amCCm
his explanation says:
Itís nearly impossible to find well-informed people about this subject, but you sound like you know what youíre talking about! Thanks
nchpubi says:
https://clck.ru/amCCm
wfhxkag says:
https://clck.ru/amCCm
Samwed says:
cialis 10mg daily use
afjiewc says:
https://clck.ru/amCCm
see more says:
I will right away grab your rss as I can not find your e-mail subscription link or e-newsletter service. Do you have any? Kindly let me know in order that I could subscribe. Thanks.
itvnjvw says:
https://clck.ru/amCCm
Ivywed says:
prescription for viagra
qtgyenf says:
https://clck.ru/amCCm
bqtgvho says:
https://clck.ru/amCCm
fzuvykv says:
https://clck.ru/amCCm
Joewed says:
purchase cialis with paypal
cqxkndu says:
https://clck.ru/amCCm
Annawed says:
crestor 3.00 coupon
rxtlyuc says:
https://clck.ru/amCCm
Ivywed says:
buy generic viagra without a prescription
Annawed says:
online pharmacy cialis
gowpcare says:
Hey! I just wanted to ask if you ever have any problems with hackers? My last blog (wordpress) was hacked and I ended up losing several weeks of hard work due to no data backup. Do you have any solutions to prevent hackers?
Kimwed says:
stromectol 3mg
kfatvnf says:
крик смотреть онлайн бесплатно крик онлайн
Boowed says:
buy brand name viagra
Samwed says:
generic cialis soft tabs 20mg
nxxngxd says:
смотреть крик крик смотреть онлайн бесплатно
hgpnvpu says:
крик смотреть онлайн бесплатно крик фильм 2022
Suewed says:
aurogra 100 online
Kimwed says:
ivermectin virus
wsmeuvw says:
фильм крик крик фильм онлайн
ireqhby says:
смотреть крик фильм крик
Kiawed says:
how to order viagra in india
gcvqpep says:
крик онлайн смотреть крик
Ugowed says:
buy ivermectin uk
rabbit vibrator says:
Im obliged for the blog post.Thanks Again. Awesome.
ewokfhn says:
смотреть крик крик смотреть онлайн бесплатно
Ashwed says:
cialis over the counter mexico
Jackwed says:
ivermectin 400 mg
https://www.teachertube.com/user/channel/robertkeller tuxedo.org says:
Aw, this was an extremely good post. Spending some time and actual effort to create a really good articleÖ but what can I sayÖ I hesitate a lot and don’t manage to get anything done.
ejdazeb says:
фильм крик крик смотреть онлайн
mohgcyl says:
крик фильм 2022 смотреть крик
도박코인 says:
It’s great that you are getting thoughts from this
post as well as from our discussion made here.
mhwyxlz says:
крик смотреть онлайн бесплатно фильм онлайн крик
Snap Names Girls says:
This is one awesome blog article.Thanks Again. Really Great.
important site says:
zithromax coverage zirthomax strep throat wikipedia
zbhzqlh says:
фильм онлайн крик смотреть фильм крик
kaleanders says:
I do consider all the ideas you’ve presented to yourpost. They’re very convincing and will certainly work.Still, the posts are very quick for starters. May you please prolong them a little fromsubsequent time? Thank you for the post.
mehlxns says:
крик смотреть онлайн фильм онлайн крик
dwmltor says:
крик смотреть онлайн бесплатно смотреть крик
https://freesexcams.one/ says:
Thanks for sharing the post.. parents are worlds best person in each lives of individual..they need or must succeed to sustain needs of the family.
ugmzpkq says:
крик онлайн крик фильм 2022
best cheap nft to buy says:
I really like and appreciate your article.Really looking forward to read more. Fantastic.
epifpih says:
смотреть крик крик онлайн
gzmqnme says:
крик фильм онлайн крик фильм онлайн
zpgpnjq says:
фильм онлайн крик крик смотреть онлайн бесплатно
Margarita Hall says:
Simply wanna input on few general things, The website style and design is perfect, the content material is very superb :D.
Sylvia Hiestand says:
meloxicam strength and dosage meloxicam dose rat human dose of meloxicam
Erik Wilson says:
Thank you for the good writeup. It in fact was a amusement account it.
Look advanced to far added agreeable from you!
By the way, how could we communicate?
talletusbonukset says:
Hi there, I enjoy reading all of your article.
I wanted to write a little comment to support you.
สล็อตแตกง่าย เว็บตรง 2022 says:
Major thanks for the blog article.Thanks Again. Really Great.
slot deposit 5000 says:
Wow, beautiful website. Thnx …|
tattoo ideas says:
It’s going to be end of mine day, however before ending I am reading this wonderful piece of writing to increase my experience.
RV Service Shops Near Me says:
Thank you for your article post.Really looking forward to read more. Will read on…
pulsa 5000 says:
Great looking site. Assume you did a great deal of your very own coding.|
buy followers says:
Do you have any video of that? I’d like to find outsome additional information.
slot 5000 says:
Thanks intended for giving these types of good subject material.
sokrashhenie ssylok says:
does omeprazole cause gas what are the long term side effects from taking omeprazole?
budget aoteli tyres says:
I cannot thank you enough for the article.Thanks Again. Really Cool.
vay theo luong techcombank says:
Greetings! Very helpful advice in this particular article! It’s the little changes which will make the most important changes. Many thanks for sharing!
article generator says:
I am truly grateful to the owner of this web page who has shared this wonderful post at
at this place.
deposit 5000 says:
I believe that is among the so much vital information for me. And i’m satisfied reading your article. However wanna commentary on some general things, The site style is wonderful, the articles is in point of fact excellent : D. Excellent activity, cheers|
Look At This says:
ivermectin capsules for humans ivermectin for sale canada
webgirls.pl says:
This is a topic that’s near to my heart… Many thanks!
Exactly where are your contact details though?
dobre gry przeglądarkowe says:
What’s up to every one, as I am actually keen of reading this webpage’s post to be updated daily.
It contains nice material.
no call out pest control says:
Appreciate you sharing, great article post. Awesome.
เช่ากล้องวงจรปิด says:
Really appreciate you sharing this blog article.Really looking forward to read more. Much obliged.
for details says:
I read this piece of writing completely on the topic of the differenceof most up-to-date and earlier technologies, it’s remarkable article.
penis vergrößerung tabletten says:
Pretty section of content. I just stumbled upon your site
and in accession capital to assert that I acquire in fact enjoyed
account your blog posts. Anyway I will be subscribing to your augment and even I achievement
you access consistently rapidly.
tent rental says:
What’s Going down i’m New Flow XL Review to this, I stumbled upon this I have found It absolutely useful and it has aided me outloads. I’m hoping to give a contribution &aid different customers like its helped me.Great job.
movie says:
Im obliged for the post.Really thank you! Fantastic.
dong ho co says:
I need to to thank you for this good read!! I definitely loved every bit of it. I have you bookmarked to check out new things you postÖ
kim tay nguyen says:
Howdy! This post could not be written any better! Reading through this post reminds me of my good old room mate! He always kept chatting about this. I will forward this write-up to him. Pretty sure he will have a good read. Many thanks for sharing!
best article generator says:
Fascinating blog! Is your theme custom made or did you download it from somewhere?
A theme like yours with a few simple tweeks would really make my blog stand out.
Please let me know where you got your design. Many thanks
https://automaticblogcreator.xyz/ says:
You’re so awesome! I do not suppose I’ve truly read through a single
thing like that before. So wonderful to find someone with a few unique thoughts on this issue.
Really.. thank you for starting this up. This site is one thing that is
needed on the internet, someone with some originality!
for more details says:
Xbox episodio X daredevil Tracker: cuándo y cómo obtener la próxima computadora
just go to says:
free sildenafil samples maximum dose of sildenafil
see the website says:
This paragraph is truly a good one it helps new internet viewers,who are wishing in favor of blogging.
dual-ended masturbator says:
Enjoyed every bit of your blog post.Really looking forward to read more.
rats infestation uk says:
Im obliged for the article post. Awesome.
articlegenerators.xyz says:
This article presents clear idea in favor of the new users of blogging, that really how to do blogging.
pest control for rats price says:
Really enjoyed this article post.Really thank you! Awesome.
https://articlegeneration.xyz says:
I delight in, result in I found just what I was having a look
for. You have ended my 4 day lengthy hunt! God Bless you man. Have
a nice day. Bye
PCCET says:
hydroxychloroquine over the counter how to make hydroxychloroquine
Entertainment news says:
Incredible many of awesome information.community service essays the best college essays writing editing services
ocenka pozharnogo riska says:
Right now it seems like Expression Engine is the top blogging platform outthere right now. (from what I’ve read) Is that what you are usingon your blog?
Slip And Fall Injury Attorney Near Me says:
Muchos Gracias for your article post.Thanks Again. Awesome.
JimHoM says:
Check out 1this guide onhow to get free gems on cooking fever
u3iauds11
This game is a whole lot more fun when you have unlimited diamonds.If you enjoy mobile games like this you need to check out this guide
Best Site says:
stromectol over the counter – ivermectin 12 ivermectin cream 1
Going Here says:
I appreciate you sharing this post. Really Cool.
article generator says:
An impressive share! I’ve just forwarded this onto a coworker who
had been conducting a little research on this. And he actually ordered me dinner simply because I discovered it for him…
lol. So allow me to reword this…. Thank YOU for the meal!!
But yeah, thanks for spending some time to discuss this subject here on your site.
articlemaker.xyz says:
I will right away clutch your rss feed as I can not find your e-mail subscription link or
e-newsletter service. Do you’ve any? Kindly permit me realize in order that
I could subscribe. Thanks.
article creator says:
I read this post fully on the topic of the difference of
most up-to-date and earlier technologies, it’s amazing article.
adam and eve sex toys says:
I really like and appreciate your article.Much thanks again. Cool.
Visit This Page says:
Thanks designed for sharing such a pleasantidea, piece of writing is pleasant, thats why i haveread it entirely
wbfzkbq says:
http://bitly.com/my-vse-mertvy-2022
gamezoom.xyz says:
Hi! I’ve been reading your blog for some time
now and finally got the bravery to go ahead and give you a shout out from Dallas Texas!
Just wanted to tell you keep up the fantastic work!
비트코인 보너스 says:
Howdy! This is my first visit to your blog! We are a team of volunteers and starting a new project
in a community in the same niche. Your blog provided us valuable
information to work on. You have done a outstanding job!
비트코인 도박사이트 says:
Hello to all, how is the whole thing, I think every one is getting more from this web page, and your views are good for new
people.
kyjmftp says:
http://bitly.com/Batman-2022
イーサリアムカジノ says:
Thanks for finally talking about > ROS從”零”開始 – 2.
ROSSerial_Arduino測試 (Hello world, 示範publisher) – 良棋科技
(Z 機研) < Liked it!
qsxssvi says:
https://t.me/Batman2022smotret/
Nicholas Jaramillo says:
azithromycin dosage zithromax z pak zithromax
Judy Lloyd says:
I am sure this article has touched all the internet people, its really really good piece
of writing on building up new blog.
Max357 says:
Hi friends, how is the whole thing, and what you wish for to say concerning this paragraph, in my view its genuinelyamazing designed for me.
spiel platz says:
Wie man bei jackpot slots gewinnt, kmwsspielplatz de rizk online casino erfahrungen.
find here says:
Muchos Gracias for your blog post. Awesome.
metaswitch says:
I like it when individuals come together and share thoughts. Great blog, keep it up!
local computer disposal says:
Appreciate you sharing, great blog post. Really Cool.
laptop recycling says:
Really enjoyed this blog. Cool.
ivermectin 3 mg over the counter says:
healthsafety is stromectol not fda approved for lice stopa stromectol 3mg order ivermectin 12 mg – stromectol bed bug dose [url=http://ivermectin3mg.quest/#]ivermectin 3mg tablets for human[/url] pettegolezzo stromectol ose
per kg
holidays to maldives feb 2021 says:
takipçi satın al; bit.ly/instagram-ucuz-takipci-takipavm
Shantelle Hasenauer says:
When I initially commented I appear to have clicked on the -Notify me when new comments are added- checkbox and now each time a comment is added I get four emails with the same comment. There has to be a way you are able to remove me from that service? Many thanks!
yhemxdt says:
http://globus-kino.ru/web/film2/index.php?824426TOPSITES
Georgann Sakowski says:
This is a topic that is close to my heart… Take care! Where are your contact details though?
auto Article writer says:
Hello there! This is my first visit to your blog!
We are a group of volunteers and starting a new initiative in a community in the same niche.
Your blog provided us beneficial information to work on. You
have done a outstanding job!
blog post generator says:
Wow, that’s what I was looking for, what a stuff! present here at
this weblog, thanks admin of this web site.
articleuniquemaker.xyz says:
I was very happy to discover this website. I wanted
to thank you for your time for this particularly wonderful read!!
I definitely savored every little bit of it and I have you book marked to see new things in your blog.
diamondpainting says:
top notch document
Kanisha Welk says:
Great article! We are linking to this great article on our website. Keep up the great writing.
Amanda Rodriguez says:
whoah this blog is fantastic i love studying your posts. Keep up the good work! You realize, lots of persons are looking round for this info, you can aid them greatly.
Susan Vangilder says:
buy cialis cialis and viagra cialis medication
Russell Holmes says:
First off I would like to say superb blog! I had a quick question that
I’d like to ask if you don’t mind. I was interested to know how you center yourself and clear
your thoughts before writing. I have had a difficult time clearing my mind in getting
my thoughts out. I truly do take pleasure in writing but it just seems like the first 10
to 15 minutes are usually lost just trying to figure out how to begin. Any ideas or tips?
Many thanks!
More hints says:
Hey There. I found your blog using msn. This is an extremelywell written article. I’ll make sure to bookmark it and return to read more of your useful information. Thanks forthe post. I’ll definitely comeback.
togel deposit 5000 says:
Hi, i think that i saw you visited my weblog so i came to “return the favor”.I am trying to find things to enhance my web site!I suppose its ok to use some of your ideas!!|
fphbrss says:
фильм анчартед полностью
togel deposit 5000 says:
Link exchange is nothing else except it is simply placing the other person’s website link on your page at proper place and other person will also do same in support of you.|
article builder says:
I have read so many posts regarding the blogger lovers however
this piece of writing is genuinely a fastidious piece of writing, keep it up.
article generator online says:
Hey There. I found your blog using msn. This is a really well written article.
I will make sure to bookmark it and return to read more of your useful information. Thanks
for the post. I’ll certainly return.
online article maker says:
naturally like your website however you have to test the spelling on quite a few of
your posts. Several of them are rife with spelling issues and I
in finding it very troublesome to inform the reality however I’ll
surely come again again.
สล็อตแตกง่าย says:
A big thank you for your article.Really looking forward to read more. Great.
enterprise saas development says:
Aw, this was a really good post. Spending some time and actual effort to produce a top notch article… but what can I say… I hesitate a lot and never manage to get anything done.
Best RV Repair Near Me says:
Iím amazed, I have to admit. Rarely do I encounter a blog thatís equally educative and entertaining, and without a doubt, you’ve hit the nail on the head. The issue is something too few people are speaking intelligently about. I am very happy that I stumbled across this in my hunt for something relating to this.
RV Exhaust Repair Near Me says:
Good post. I learn something totally new and challenging on websites I stumbleupon every day. It’s always exciting to read through content from other authors and practice something from other sites.
Best mobile app development company says:
A motivating dialogue is undoubtedly worthy of comment. I believe that you ought to generate a lot more on this subject, it may not be a taboo matter but commonly individuals don’t focus on these subjects. To another! Lots of thanks!!
wSZeo says:
Aams kostenlose slot spiele, gkgw – kostenlos spielen slot machine.
content generator software says:
Greate article. Keep posting such kind of info on your site.
Im really impressed by your blog.
Hello there, You have performed a fantastic job. I’ll certainly digg
it and personally suggest to my friends. I’m confident they’ll be benefited from
this site.
RV Frame Repair Near Me says:
This web site truly has all the info I needed concerning this subject and didnít know who to ask.
https://articlewritinggenerator.xyz/ says:
Hi i am kavin, its my first occasion to commenting anywhere, when i read this post
i thought i could also make comment due to this sensible
post.
RV Mechanics Near Me says:
The very next time I read a blog, I hope that it does not fail me as much as this one. After all, I know it was my choice to read, nonetheless I really believed you’d have something interesting to say. All I hear is a bunch of crying about something that you could possibly fix if you were not too busy looking for attention.
articlewriteronline.xyz says:
I need to to thank you for this good read!! I absolutely enjoyed every
bit of it. I have got you saved as a favorite to look at new things you post…
slot 5000 says:
I know this web site provides quality depending content and other information, is there any other web site which provides these kinds of stuff in quality?|
Sirsmuct says:
dark web market tor markets 2021
RV Repair Near Here says:
I’m very happy to uncover this website. I need to to thank you for ones time for this particularly wonderful read!! I definitely appreciated every part of it and i also have you book-marked to see new things in your blog.
Motorhome Collision Repair Near Me says:
Itís hard to find knowledgeable people for this topic, but you sound like you know what youíre talking about! Thanks
Look At These Guys says:
hi!,I like your writing so so much! proportion we communicate extra approximately your article on AOL? I need an expert in this space to unravel my problem. May be that’s you! Having a look forward to look you.
Home says:
does ivermectin kill scabies ivermectin for scabies dosage
how to refinance says:
Thanks-a-mundo for the blog.Much thanks again.
autocontentwriter.xyz says:
I really like your blog.. very nice colors & theme.
Did you design this website yourself or did you hire someone to do
it for you? Plz respond as I’m looking to design my own blog and would like
to find out where u got this from. cheers
auto article writer says:
This is very interesting, You are a very skilled blogger. I
have joined your rss feed and look forward to seeking more
of your wonderful post. Also, I have shared your website in my social networks!
happy hooker says:
After I originally commented I seem to have clicked the -Notify me when new comments are added- checkbox and from now on whenever a comment is added I receive four emails with the same comment. Perhaps there is a way you can remove me from that service? Thanks a lot!
autoblogwriter.xyz says:
Greetings! This is my 1st comment here so I just wanted to give a quick shout
out and say I truly enjoy reading your blog posts. Can you recommend any other blogs/websites/forums that go over the same subjects?
Appreciate it!
Kellydum says:
heineken onion dark web markets
TimKal says:
deep web drug url darkmarket
JimLib says:
darkmarket 2021 dark market 2021
Sirsmuct says:
dark market tor market
DavidWhaft says:
dark market 2022 tor market url
Samuelnum says:
darknet market dark market onion
BobbyEvinc says:
best darknet markets drug markets dark web
Dezzyvurse says:
dark web market list dark market url
LennyCop says:
dark web market darknet drug links
Patrickevali says:
bitcoin dark web dark web markets
Williamliacy says:
darkode url darkmarket
Patricktug says:
darkmarket list dark web sites
Dylannot says:
dark web drug marketplace darknet marketplace
OzzyMip says:
dark market deep web drug markets
TimKal says:
dark market url deep web drug links
JennyMip says:
darknet market darknet drug store
Ashleybar says:
tor dark web darknet market
DonnyCop says:
darknet market tor dark web
Additional Reading says:
Hi there, after reading this remarkable paragraph i am alsohappy to share my knowledge here with colleagues.
Sharylhilla says:
darknet market deep web drug store
DennyCop says:
dark web sites darknet drug store
Commercial Washing says:
I used to be able to find good information from your blog articles.
Versusvurse says:
tor dark web drug markets dark web
Rickvurse says:
dark market url deep web drug markets
DavidWhaft says:
deep web drug store drug markets dark web
Johnnot says:
dark web market links darknet market links
DiamondEvinc says:
dark market 2022 darknet markets
TeddyMip says:
dark markets 2022 dark market onion
Ricconot says:
darknet markets darknet drug store
Diedraovers says:
darknet drug links dark web sites
Samuelnum says:
dark web market links dark market onion
Kellydum says:
tor markets 2021 tor market url
TimKal says:
dark web market links darknet market list
Patrickevali says:
darkmarket list dark market 2021
Dezzyvurse says:
darkmarket url tor markets links
Sirsmuct says:
asap link darkmarket 2021
JimLib says:
tor marketplace tor market url
DavidWhaft says:
darkmarket link dark market link
Williamliacy says:
best darknet markets dark0de url
Bobb1Evinc says:
darkmarket 2022 deep web drug links
LennyCop says:
darknet market drug markets onion
Anoldvurse says:
dark market onion darkmarket 2021
BobbyEvinc says:
drug markets onion darkmarket 2021
DonnyCop says:
dark market onion dark web market
hpmgyay says:
Одиннадцать молчаливых мужчин
DennyCop says:
tor dark web darknet market list
Ashleybar says:
tor market darknet market lists
FelixMip says:
deep web drug links darkmarket 2021
LawrenceCop says:
dark web market dark web drug marketplace
Josenot says:
deep web drug links darkmarket 2021
Rickvurse says:
dark web link dark web link
Dylannot says:
dark web market tor markets links
DavidWhaft says:
darkode reborn darkmarket link
Sharylhilla says:
dark web market list dark web market links
OzzyMip says:
dark market dark market url
PedroEvinc says:
deep web drug markets bitcoin dark web
Sirsmuct says:
darkode link darkode url
Versusvurse says:
deep web drug markets dark web market list
JennyMip says:
tor markets links dark web link
TimKal says:
darknet websites tor market
Patricktug says:
tor market darknet websites
Diedraovers says:
deep web drug store tor dark web
Johnnot says:
darknet websites dark web market
DiamondEvinc says:
darkmarket 2021 deep web drug store
Patrickevali says:
darkmarket 2022 dark market url
Dezzyvurse says:
darkmarket 2022 drug markets dark web
Samuelnum says:
tor market url tor markets links
Ricconot says:
drug markets dark web darknet drug links
TeddyMip says:
dark web market dark web market links
LennyCop says:
drug markets dark web darkmarket list
Anoldvurse says:
darknet drug market dark market onion
DennyCop says:
dark market url drug markets onion
LawrenceCop says:
dark market list dark market link
Kellydum says:
darknet drug store deep web drug store
Bobb1Evinc says:
deep web markets dark web markets
JimLib says:
darkmarket url dark web drug marketplace
Ashleybar says:
deep web drug markets darkmarket url
Sirsmuct says:
darkode url darkmarket
Williamliacy says:
tor markets links dark0de market
Rickvurse says:
deep web drug markets dark market 2022
Sharylhilla says:
darknet websites dark web markets
BobbyEvinc says:
dark web drug marketplace dark market 2022
TimKal says:
tor market deep web markets
DonnyCop says:
tor marketplace dark web market
Versusvurse says:
dark market url dark market list
Josenot says:
darkmarket 2022 tor market
Dylannot says:
dark web link dark market url
PedroEvinc says:
deep web drug links dark market 2022
OzzyMip says:
darkmarket 2022 deep web markets
JennyMip says:
darkmarket darkmarket list
Diedraovers says:
tor market dark web link
Sirsmuct says:
best darknet markets drug markets dark web
Johnnot says:
dark market tor markets 2022
DennyCop says:
tor marketplace dark market 2021
Patricktug says:
darknet markets tor market links
Dezzyvurse says:
darknet market list tor market
DiamondEvinc says:
dark market 2022 darkmarket 2022
Samuelnum says:
dark market list darknet websites
Anoldvurse says:
dark web market tor markets 2022
Ricconot says:
deep web drug markets darkmarket list
LennyCop says:
darknet websites darkmarket url
DavidWhaft says:
darkode url dark market onion
LawrenceCop says:
dark market 2022 darknet market lists
TeddyMip says:
tor markets links dark market list
JimLib says:
darknet market links dark market link
Ashleybar says:
drug markets onion dark web markets
Rickvurse says:
darkmarket link dark web sites
DonnyCop says:
darkmarket url darknet market
Sharylhilla says:
darkmarket list best darknet markets
Bobb1Evinc says:
deep web markets darknet market
TimKal says:
drug markets onion tor markets links
Sirsmuct says:
dark0de market deep web drug url
Josenot says:
deep web drug store dark market link
Williamliacy says:
dark markets 2022 darknet websites
BobbyEvinc says:
tor marketplace darkmarket 2022
Travel Trailer Service Near Me says:
An impressive share! I’ve just forwarded this onto a co-worker who was doing a little research on this. And he actually bought me breakfast simply because I found it for him… lol. So allow me to reword this…. Thank YOU for the meal!! But yeah, thanks for spending some time to talk about this matter here on your web site.
Kellydum says:
deep web drug links darknet market lists
Versusvurse says:
drug markets dark web dark web markets
PedroEvinc says:
dark markets 2022 tor markets links
Dylannot says:
dark web market tor market url
DennyCop says:
dark market url darknet markets
OzzyMip says:
darknet market lists tor markets 2021
content Generator says:
Nice blog here! Also your website loads up fast! What host are you using?
Can I get your affiliate link to your host? I wish my website
loaded up as quickly as yours lol
Dezzyvurse says:
darknet market list dark web market
DiamondEvinc says:
darkmarket tor market url
Patricktug says:
tor markets 2021 dark market
LawrenceCop says:
tor markets 2022 dark market link
Johnnot says:
bitcoin dark web darknet drug store
LennyCop says:
dark web market list darkmarket
Anoldvurse says:
dark web drug marketplace tor markets links
DavidWhaft says:
tor market links deep web drug store
TimKal says:
tor market tor market
Samuelnum says:
tor marketplace bitcoin dark web
DonnyCop says:
darknet drug links dark web market list
Ashleybar says:
deep web drug markets dark market 2021
Rickvurse says:
darkmarket 2022 dark market
Williamliacy says:
darkode market dark market url
Ricconot says:
dark market url darknet drug links
TeddyMip says:
darknet market list dark market
Sirsmuct says:
dark market link dark0de darknet market
Sharylhilla says:
darkmarket list darkmarket list
BobbyEvinc says:
tor markets 2021 tor markets 2022
JimLib says:
darkmarket 2021 dark web market links
Bobb1Evinc says:
dark web drug marketplace dark web drug marketplace
Patrickevali says:
darknet market list dark market
PedroEvinc says:
dark web market list dark market url
Versusvurse says:
darknet drug market best darknet markets
DennyCop says:
darknet drug store dark market
FelixMip says:
darknet drug store darknet markets
Josenot says:
tor market links deep web drug links
Kellydum says:
darknet market links darknet market lists
Patricktug says:
tor market url darknet websites
Dezzyvurse says:
darknet drug market darknet marketplace
Dylannot says:
tor markets 2021 tor markets 2022
DiamondEvinc says:
deep web markets tor marketplace
DavidWhaft says:
dark web market links tor market
JennyMip says:
darkmarket 2021 tor market url
Johnnot says:
darkmarket url tor markets 2021
Rickvurse says:
tor market dark web market
LawrenceCop says:
dark web markets darknet drug market
OzzyMip says:
deep web drug links tor market
Ashleybar says:
drug markets onion darkmarket
DonnyCop says:
darknet markets tor market url
Sirsmuct says:
dark0de darknet market dark0de darknet market
Diedraovers says:
darkmarket url dark market onion
Samuelnum says:
darknet websites best darknet markets
Anoldvurse says:
tor market links darkmarket 2021
Ricconot says:
dark market darknet market lists
LennyCop says:
drug markets dark web deep web drug markets
TimKal says:
dark market list darknet drug links
JimLib says:
tor markets links darknet drug market
TeddyMip says:
darkmarket 2022 deep web drug store
DennyCop says:
deep web drug url tor markets links
Bobb1Evinc says:
tor market url dark market list
BobbyEvinc says:
dark web markets darknet drug market
DavidWhaft says:
darknet drug links dark web market list
Versusvurse says:
tor market darknet market list
PedroEvinc says:
darkmarket list darknet markets
DiamondEvinc says:
darknet market darknet market list
Dezzyvurse says:
tor markets 2022 darknet drug store
unique article generator says:
Howdy! This is my first visit to your blog! We are a
collection of volunteers and starting a new initiative in a community in the same niche.
Your blog provided us useful information to work on. You have done a wonderful job!
LawrenceCop says:
darkmarket link tor market url
Ashleybar says:
darknet market links dark web link
Williamliacy says:
darknet market deep web markets
Dylannot says:
tor dark web best darknet markets
FelixMip says:
tor markets links dark web market
auto content creator says:
Pretty nice post. I just stumbled upon your blog and wished to say that I
have truly enjoyed surfing around your blog posts.
In any case I’ll be subscribing for your feed and I am hoping you write once more soon!
Patrickevali says:
darkmarket darknet drug links
TimKal says:
darknet market list tor marketplace
Josenot says:
darknet websites darknet markets
Rickvurse says:
darkmarket deep web markets
DonnyCop says:
darknet marketplace dark web sites
LennyCop says:
deep web drug store dark market onion
Patricktug says:
darkmarket list dark market onion
Johnnot says:
darknet drug links dark market link
Anoldvurse says:
darkmarket link bitcoin dark web
OzzyMip says:
darkmarket 2022 dark market list
Samuelnum says:
darkmarket dark market 2022
BobbyEvinc says:
dark markets 2022 best darknet markets
JimLib says:
tor market url darknet drug market
DennyCop says:
dark web market list darkmarket 2021
Ricconot says:
darkmarket 2021 tor market links
DavidWhaft says:
darkode link drug markets onion
TeddyMip says:
drug markets onion deep web drug links
Versusvurse says:
darkmarket url darknet drug store
Bobb1Evinc says:
tor markets 2022 bitcoin dark web
DiamondEvinc says:
dark market 2022 darknet markets
Dezzyvurse says:
darkmarket 2022 tor markets links
PedroEvinc says:
dark web drug marketplace dark market link
Diedraovers says:
darkmarket list dark market link
veterinar dnepr says:
I don’t even know how I finished up right here, but I believed this publish used to be good. I don’t realize who you are but certainly you’re going to a well-known blogger for those who are not already 😉 Cheers!
LawrenceCop says:
bitcoin dark web deep web drug store
Patricktug says:
dark market 2021 tor market url
LennyCop says:
tor markets 2021 tor markets 2022
Patrickevali says:
darknet market links tor market links
zithromax 250 mg online says:
citur can i take advil with azithromycin pretensions how azithromycin works is zithromax an antibiotic – azithromycin vs
ciprofloxacin for chlamydia [url=http://zithromax1.quest/#]zithromax allergies[/url] sciatic azithromycin dosage in renal
failure
Kellydum says:
heineken onion dark market onion
Williamliacy says:
darkmarket list dark market onion
DonnyCop says:
dark web link darkmarket 2021
FelixMip says:
deep web drug store dark market onion
Josenot says:
dark web drug marketplace bitcoin dark web
vetclinica ber says:
Heya i am for the first time here. I found this board and I in finding It really useful & it helped me out a lot. I hope to provide something back and help others like you aided me.
Rickvurse says:
dark market onion tor markets 2021
DavidWhaft says:
darknet markets dark web drug marketplace
Sirsmuct says:
dark market url darknet markets
Dylannot says:
tor market links darknet market lists
Anoldvurse says:
best darknet markets tor markets 2021
Samuelnum says:
darkmarket darknet market list
DennyCop says:
tor market tor dark web
JennyMip says:
dark market 2021 darknet market links
hotshot bald cop says:
Hello there, I found your website by the use of Google whilst looking for a comparable matter, your website got
here up, it appears good. I’ve bookmarked it in my google bookmarks.
Hi there, simply changed into aware of your weblog thru Google, and found that it’s
truly informative. I am going to watch out for brussels.
I will appreciate in case you proceed this in future.
A lot of folks shall be benefited from your writing.
Cheers!
OzzyMip says:
darkmarket list drug markets onion
Johnnot says:
darknet market lists darkmarket link
BobbyEvinc says:
deep web drug links tor marketplace
Versusvurse says:
deep web drug markets darkmarket 2021
JimLib says:
dark web market darknet market
Ricconot says:
dark market 2022 darknet drug links
Bobb1Evinc says:
tor market links darkmarket 2021
LennyCop says:
darknet market list tor market links
PedroEvinc says:
dark market link dark market list
TeddyMip says:
tor marketplace darknet market list
Diedraovers says:
tor markets 2021 darknet drug store
Dezzyvurse says:
tor markets links dark market link
DiamondEvinc says:
dark web markets darknet drug market
LawrenceCop says:
darknet drug store tor market links
Patricktug says:
dark web sites darknet market lists
DavidWhaft says:
dark web market dark market 2022
Patrickevali says:
dark web market tor markets links
DonnyCop says:
tor market links dark web markets
DennyCop says:
darkmarket 2021 dark web drug marketplace
Williamliacy says:
darkode reborn tor market url
TimKal says:
darkmarket list dark markets 2022
Sirsmuct says:
darkode link dark web sites
FelixMip says:
darkmarket darknet market links
Josenot says:
dark web sites dark market url
Rickvurse says:
tor market deep web drug store
JennyMip says:
darknet market darkmarket 2021
Samuelnum says:
tor market darknet websites
Ashleybar says:
darknet websites tor market
Dylannot says:
darknet drug links deep web drug store
Anoldvurse says:
darknet drug market dark web markets
Versusvurse says:
tor dark web darknet drug market
OzzyMip says:
tor markets 2021 darknet marketplace
Johnnot says:
darkmarket 2021 dark web markets
Ricconot says:
tor market url dark web link
BobbyEvinc says:
drug markets onion tor markets links
LennyCop says:
darkmarket url darkmarket
hotshot bald cop says:
Why is it I always really feel like you do?
LawrenceCop says:
darknet websites deep web markets
Dezzyvurse says:
darknet drug links darkmarket url
Diedraovers says:
dark web market deep web drug links
Bobb1Evinc says:
darknet marketplace deep web drug markets
JimLib says:
darkmarket url darknet marketplace
TeddyMip says:
dark web sites drug markets dark web
DavidWhaft says:
dark0de url darkmarket
Patricktug says:
darknet market links deep web drug links
PedroEvinc says:
darkmarket url dark web markets
DiamondEvinc says:
tor markets 2021 drug markets dark web
Patrickevali says:
deep web drug store dark market onion
Sirsmuct says:
dark market link deep web drug url
DonnyCop says:
darknet market lists darknet marketplace
DennyCop says:
darknet websites deep web markets
TimKal says:
dark market url dark market 2021
Ashleybar says:
bitcoin dark web deep web drug markets
Williamliacy says:
dark web market list darknet drug links
Samuelnum says:
darkmarket list drug markets dark web
Versusvurse says:
darkmarket 2022 darknet market list
Kellydum says:
dark market list dark web market list
FelixMip says:
tor markets 2021 darknet market list
LennyCop says:
darknet websites deep web drug url
Josenot says:
best darknet markets dark web market links
Rickvurse says:
drug markets onion darknet market list
JennyMip says:
dark market url dark market 2021
Dezzyvurse says:
deep web markets darknet markets
Anoldvurse says:
deep web markets drug markets dark web
Versusvurse says:
darknet market links darknet market
Ricconot says:
dark market list darknet market
BobbyEvinc says:
tor dark web tor dark web
LawrenceCop says:
best darknet markets darkmarket 2022
Diedraovers says:
dark web markets tor marketplace
Dylannot says:
bitcoin dark web dark market onion
OzzyMip says:
darknet market links tor dark web
Sirsmuct says:
dark market darkode reborn link
Bobb1Evinc says:
darknet market list bitcoin dark web
DavidWhaft says:
darkode reborn tor dark web
DonnyCop says:
darkmarket drug markets onion
PedroEvinc says:
darknet market best darknet markets
Patrickevali says:
darkmarket 2022 dark web market list
TeddyMip says:
tor dark web darknet marketplace
JimLib says:
dark market onion heineken onion
Patricktug says:
bitcoin dark web heineken onion
DiamondEvinc says:
dark market url darkmarket 2021
DennyCop says:
tor market darknet market lists
Williamliacy says:
dark0de market drug markets onion
Rickvurse says:
tor market url dark web drug marketplace
TimKal says:
drug markets onion dark web drug marketplace
Kellydum says:
dark web market links dark market 2022
Sirsmuct says:
darkode url dark market 2021
BobbyEvinc says:
tor markets 2021 dark market
LawrenceCop says:
dark web drug marketplace drug markets dark web
Josenot says:
dark market url tor markets 2021
LennyCop says:
darknet drug store tor market links
Diedraovers says:
dark web markets dark markets 2022
Versusvurse says:
darkmarket list darkmarket link
FelixMip says:
dark web drug marketplace tor dark web
Samuelnum says:
darknet marketplace tor dark web
Anoldvurse says:
darknet marketplace tor markets links
DonnyCop says:
tor dark web deep web drug url
OzzyMip says:
darkmarket list tor market url
JennyMip says:
deep web drug links dark markets 2022
Patrickevali says:
darknet marketplace tor market
Dezzyvurse says:
darknet market list deep web drug url
Bobb1Evinc says:
dark web link darkmarket 2021
Ashleybar says:
dark web market list dark web market
Johnnot says:
dark web market deep web drug markets
DavidWhaft says:
darkode reborn link darknet marketplace
DennyCop says:
tor market links darknet markets
Ricconot says:
drug markets dark web darknet drug links
TeddyMip says:
darkmarket 2022 darknet marketplace
PedroEvinc says:
darknet websites darkmarket 2021
JimLib says:
tor market links dark market 2022
Rickvurse says:
dark market list darkmarket list
Williamliacy says:
dark web market links darkode market
Patricktug says:
darkmarket url heineken onion
DiamondEvinc says:
dark web market list darknet marketplace
Sirsmuct says:
best darknet markets tor market url
LennyCop says:
dark market link dark market 2021
Kellydum says:
deep web drug url darkmarket 2022
RV Motorhome Repair Near Me says:
Good post. I’m facing a few of these issues as well..
LawrenceCop says:
darknet marketplace deep web drug markets
Versusvurse says:
darknet market links dark web market
Diedraovers says:
darknet market links drug markets onion
Anoldvurse says:
dark market 2021 dark web link
TimKal says:
dark web market tor markets 2021
Josenot says:
tor market links tor markets links
BobbyEvinc says:
dark market link darknet drug store
Ashleybar says:
darkmarket url deep web markets
DonnyCop says:
darknet markets dark market 2022
DennyCop says:
dark web market list best darknet markets
Samuelnum says:
tor market links dark web market
FelixMip says:
dark web link dark markets 2022
OzzyMip says:
tor market url tor markets 2022
JennyMip says:
darknet market list darknet websites
Dezzyvurse says:
best darknet markets deep web drug store
DavidWhaft says:
darknet market list tor marketplace
DonnyCop says:
darknet market lists darknet market
Ricconot says:
dark market url dark market url
Bobb1Evinc says:
darknet websites darkmarket link
Sirsmuct says:
drug markets onion deep web drug store
Williamliacy says:
darknet websites dark web market links
JimLib says:
tor market darkmarket list
DiamondEvinc says:
tor market darknet market lists
Rickvurse says:
dark web market list dark market list
LennyCop says:
deep web drug store dark web drug marketplace
Johnnot says:
darknet drug links dark market 2022
Patricktug says:
darknet market lists darknet marketplace
TeddyMip says:
tor markets links darkmarket 2021
PedroEvinc says:
dark market link darknet market list
Kellydum says:
dark web link dark web market links
Anoldvurse says:
darkmarket list dark web market
LawrenceCop says:
darkmarket link darknet market
Diedraovers says:
darknet market lists dark web drug marketplace
Ashleybar says:
darkmarket dark web link
TimKal says:
deep web drug markets deep web drug links
Versusvurse says:
dark market 2021 darkmarket
BobbyEvinc says:
darkmarket list dark market
Josenot says:
tor marketplace drug markets dark web
DennyCop says:
tor market url darknet markets
Samuelnum says:
dark web link darknet drug links
FelixMip says:
tor markets 2022 darknet market list
Dylannot says:
darkmarket 2022 deep web drug markets
Dezzyvurse says:
dark market drug markets onion
JennyMip says:
darknet marketplace darknet drug store
DonnyCop says:
dark market tor marketplace
Ricconot says:
tor market links dark web market list
DavidWhaft says:
dark0de url dark market onion
Bobb1Evinc says:
darkmarket dark web markets
JimLib says:
darknet drug links tor market links
DiamondEvinc says:
best darknet markets deep web drug links
Rickvurse says:
dark market url darknet markets
Sirsmuct says:
dark web drug marketplace darkmarket 2021
Williamliacy says:
darknet market links darknet market links
LennyCop says:
dark market 2022 tor market
Patricktug says:
dark market list deep web drug url
Kellydum says:
tor marketplace dark market onion
Johnnot says:
dark market dark markets 2022
TeddyMip says:
tor marketplace dark web sites
PedroEvinc says:
dark market tor markets 2022
LawrenceCop says:
dark market dark web link
Anoldvurse says:
darknet market links dark market 2022
BobbyEvinc says:
best darknet markets dark markets 2022
Versusvurse says:
darkmarket 2021 dark web market links
Ashleybar says:
deep web drug markets dark web market list
DennyCop says:
tor market drug markets dark web
TimKal says:
darkmarket list darkmarket 2022
OzzyMip says:
darkmarket 2021 darkmarket 2022
Samuelnum says:
darknet market lists deep web drug links
Josenot says:
darknet marketplace darkmarket 2022
JamesTralp says:
https://stromectolst.com/# stromectol drug
ivermectin purchase
FelixMip says:
dark web link dark web market list
Dezzyvurse says:
deep web drug url darkmarket link
JennyMip says:
drug markets onion deep web drug markets
DonnyCop says:
deep web drug store dark market
DavidWhaft says:
darkmarket url dark0de url
Ricconot says:
dark market 2022 darkmarket link
Bobb1Evinc says:
deep web drug store darknet marketplace
Williamliacy says:
darkmarket 2022 darkmarket
Rickvurse says:
drug markets dark web darkmarket link
Kellydum says:
darkmarket darkmarket 2021
DiamondEvinc says:
deep web markets dark market url
LennyCop says:
deep web drug links dark web drug marketplace
Johnnot says:
tor markets 2022 darknet market lists
TeddyMip says:
dark market dark market 2021
PedroEvinc says:
tor markets 2022 darkmarket 2021
LawrenceCop says:
deep web drug url tor markets 2021
OzzyMip says:
darkmarket link bitcoin dark web
BobbyEvinc says:
darkmarket 2022 tor markets 2021
Anoldvurse says:
drug markets onion darknet drug store
visit says:
Howdy! Do you know if they make any plugins to help withSearch Engine Optimization? I’m trying to get my blog to rank for some targeted keywords but I’m not seeing verygood gains. If you know of any please share.Appreciate it!
Versusvurse says:
darknet drug market dark web drug marketplace
Samuelnum says:
dark web link tor market links
DennyCop says:
darknet marketplace tor marketplace
Ashleybar says:
darknet markets darknet drug store
Josenot says:
drug markets dark web darknet market lists
TimKal says:
darknet market links tor marketplace
Sirsmuct says:
bitcoin dark web dark web market
Williamliacy says:
darkode link darknet drug market
FelixMip says:
deep web markets deep web markets
JennyMip says:
tor marketplace darknet market
Kellydum says:
tor markets links tor marketplace
DonnyCop says:
darknet market deep web drug links
Ricconot says:
darknet websites tor dark web
Bobb1Evinc says:
tor markets 2021 darknet websites
Rickvurse says:
dark market 2021 drug markets onion
Johnnot says:
dark market link tor marketplace
DiamondEvinc says:
darknet websites darknet marketplace
LennyCop says:
dark web sites dark markets 2022
PedroEvinc says:
tor dark web darknet market links
OzzyMip says:
deep web drug store dark market 2022
Sharylhilla says:
dark markets 2022 darknet drug links
LawrenceCop says:
darknet drug store deep web drug url
Patrickevali says:
darknet drug market darknet market
Diedraovers says:
tor market dark markets 2022
BobbyEvinc says:
tor market links dark market url
Samuelnum says:
dark market dark web link
Versusvurse says:
tor markets 2022 deep web drug store
Sirsmuct says:
darkode reborn link dark market link
DennyCop says:
deep web drug markets darknet websites
Anoldvurse says:
tor markets 2021 darkmarket 2021
Patricktug says:
heineken onion darknet drug store
Ashleybar says:
tor markets 2022 tor dark web
Josenot says:
deep web markets dark web sites
TimKal says:
dark web sites darkmarket
JennyMip says:
deep web drug url darkmarket list
Ricconot says:
tor markets 2021 darknet drug links
DonnyCop says:
darknet markets darknet market links
FelixMip says:
darkmarket link dark market link
Bobb1Evinc says:
tor markets 2021 dark web market list
Dezzyvurse says:
darkmarket 2021 tor markets 2021
Rickvurse says:
darknet drug store tor markets 2021
TeddyMip says:
dark markets 2022 dark web drug marketplace
DiamondEvinc says:
dark markets 2022 drug markets onion
PedroEvinc says:
darknet markets darknet drug market
Sirsmuct says:
tor markets 2022 dark web market links
LennyCop says:
dark web market links dark market
OzzyMip says:
tor market links dark market 2022
Williamliacy says:
dark market darknet marketplace
JamesTralp says:
http://stromectolst.com/# ivermectin 3 mg
ivermectin rx
LawrenceCop says:
tor market url tor markets links
BobbyEvinc says:
best darknet markets dark web market list
Versusvurse says:
dark market 2021 dark web market list
Patrickevali says:
tor markets 2022 dark market 2021
Diedraovers says:
dark web sites deep web markets
Kellydum says:
dark web sites tor dark web
DennyCop says:
darknet websites dark markets 2022
Anoldvurse says:
deep web drug links dark web sites
Ashleybar says:
tor markets links tor markets 2021
Josenot says:
tor markets 2021 dark market
DonnyCop says:
tor marketplace deep web drug url
JennyMip says:
dark market 2021 dark market 2021
Ricconot says:
bitcoin dark web darkmarket list
TimKal says:
tor market dark market list
Bobb1Evinc says:
drug markets onion darknet markets
FelixMip says:
bitcoin dark web darkmarket 2022
Johnnot says:
dark markets 2022 darkmarket
Dezzyvurse says:
darknet drug links tor markets links
Rickvurse says:
dark markets 2022 dark market list
DavidWhaft says:
darkmarket link darknet drug links
moon jumps San Antonio says:
Hey! Do you use Twitter? I’d like to follow you if that would be okay.I’m definitely enjoying your blog and look forward to new posts.
OzzyMip says:
dark web markets tor markets 2021
Dylannot says:
darkmarket tor dark web
Williamliacy says:
dark web markets dark market
Sharylhilla says:
tor market url darknet drug links
DiamondEvinc says:
dark market list darknet drug market
PedroEvinc says:
dark web market list deep web drug markets
LennyCop says:
dark market url dark web sites
BobbyEvinc says:
darknet drug market darkmarket link
LawrenceCop says:
dark web link dark markets 2022
Patrickevali says:
darkmarket tor market links
Diedraovers says:
dark web market darknet websites
DennyCop says:
dark web sites darkmarket
DonnyCop says:
dark web markets tor market url
Josenot says:
dark web drug marketplace best darknet markets
Ashleybar says:
bitcoin dark web tor markets 2022
TeddyMip says:
deep web drug url drug markets dark web
JennyMip says:
darknet market deep web drug markets
Anoldvurse says:
deep web markets tor markets 2022
Ricconot says:
darkmarket 2021 darkmarket list
Bobb1Evinc says:
darknet market links dark market 2022
TimKal says:
tor markets links deep web drug url
FelixMip says:
dark market tor marketplace
Rickvurse says:
drug markets onion drug markets dark web
Dylannot says:
tor market url dark market 2022
Dezzyvurse says:
dark market 2021 darkmarket
Williamliacy says:
darknet drug market darknet market lists
Sharylhilla says:
darknet drug store darkmarket list
JimLib says:
darknet drug links darknet drug store
PedroEvinc says:
darknet market lists dark market list
DiamondEvinc says:
dark market dark web markets
LennyCop says:
darkmarket url bitcoin dark web
BobbyEvinc says:
tor markets links darkmarket 2021
Samuelnum says:
darkode market darkmarket link
Sirsmuct says:
darknet drug market drug markets onion
Versusvurse says:
darknet drug links darkmarket
LawrenceCop says:
dark web market deep web drug url
Patrickevali says:
best darknet markets darknet drug market
DennyCop says:
tor markets 2021 dark market
Diedraovers says:
dark web markets drug markets onion
DonnyCop says:
dark markets 2022 darknet drug market
https://Automaticarticle.xyz/ says:
Hey I know this is off topic but I was wondering if you knew of
any widgets I could add to my blog that automatically tweet my newest twitter updates.
I’ve been looking for a plug-in like this for quite some time and was hoping maybe you
would have some experience with something like this. Please let me know
if you run into anything. I truly enjoy reading your blog and
I look forward to your new updates.
TeddyMip says:
dark market link darknet markets
prettysbowtique.com/collections/new-born says:
I’m a partner in champix vademecum precio If convicted, he faces up to 30 years for conspiracy tocommit wire fraud, another 30 years for wire fraud and fiveyears each for gaining unauthorized access to computers andconspiracy to gain access.
Ashleybar says:
darknet drug store tor market url
JennyMip says:
darknet market deep web drug links
Josenot says:
dark market onion deep web drug links
Ricconot says:
darkmarket list darkmarket url
Bobb1Evinc says:
best darknet markets dark web link
Anoldvurse says:
darknet drug links tor market links
TimKal says:
dark markets 2022 https://heinekenexpresmarket.com/ – darknet websites
JimLib says:
tor market links https://heinekenexpresonion.com/ – dark market list
Patricktug says:
darkmarket 2022 https://heinekenexpresshop.com/ – dark market url
FelixMip says:
deep web drug markets dark market 2021
Rickvurse says:
tor market links darknet markets
Kellydum says:
dark web link https://heinekenmarket.com/ – dark markets 2022
Williamliacy says:
drug markets dark web https://darkoderebornlink.com/ – dark web link
agheccl says:
Золото 16 серия
Dezzyvurse says:
dark web drug marketplace https://tortorrezmarket.com/ – darkmarket 2022
Hiram GA bounce house rental company says:
Uzkdsy – modafinil addiction Rnifkk lcnkem
DiamondEvinc says:
darkmarket url https://worldmarketlinktor.com/ – tor market
PedroEvinc says:
darknet drug market https://monopolymarketlinks.com/ – darknet drug store
LennyCop says:
deep web drug url https://heinekenexpresonion.com/ – tor dark web
BobbyEvinc says:
dark market link https://torrezmarketurls.com/ – dark web market links
LawrenceCop says:
best darknet markets https://mymonopolymarket.com/ – drug markets onion
Samuelnum says:
dark web link https://darkoderebornonion.com/ – drug markets onion
DavidWhaft says:
dark market https://darkoderebornurl.com/ – dark0de url
Versusvurse says:
darknet market https://versusprojectmarket.com/ – dark web markets
Sirsmuct says:
dark market 2022 https://darkoderebornmarkets.com/ – dark web market
RV Sales And Repair Near Me says:
Very good post! We are linking to this particularly great article on our website. Keep up the great writing.
Patrickevali says:
darknet marketplace https://tortorrezmarket.com/ – tor dark web
DennyCop says:
darkmarket https://darkoderebornmarkets.com/ – tor market url
Diedraovers says:
tor market url https://torrezmarketonion.com/ – dark market list
Johnnot says:
tor markets 2021 https://cannahomedarkmarket.com/ – deep web markets
DonnyCop says:
dark web market https://versus-dark-market.com/ – deep web drug store
TimKal says:
darknet marketplace https://heinekenexpresmarket.com/ – dark web market list
Dylannot says:
deep web drug store https://asapmarketurls.com/ – darknet websites
Ashleybar says:
dark market link https://torrezmarketurls.com/ – best darknet markets
JennyMip says:
darkmarket 2021 https://torrez-market-urls.com/ – drug markets onion
Ricconot says:
darknet websites https://torrezlinkonion.com/ – tor markets links
TeddyMip says:
dark web market https://cannahomeurl.com/ – dark market list
JimLib says:
darkmarket 2022 https://heinekenexpresonion.com/ – darknet drug market
Josenot says:
drug markets onion https://heineken.express/ – deep web drug store
Rickvurse says:
deep web drug markets https://heinekenmarket.com/ – dark web market list
Sharylhilla says:
dark market https://torrezlinkonion.com/ – dark web link
Dezzyvurse says:
tor dark web https://tortorrezmarket.com/ – dark web drug marketplace
Anoldvurse says:
drug markets onion https://monopolymarketwww.com/ – dark web link
FelixMip says:
deep web drug markets https://monopolymarketwww.com/ – deep web drug url
DiamondEvinc says:
deep web drug store https://worldmarketlinktor.com/ – deep web drug markets
LennyCop says:
darkmarket list https://heinekenexpresmarket.com/ – darknet drug links
Patricktug says:
dark web markets https://heinekenexpresshop.com/ – darknet market links
automaticarticlewriter.xyz says:
My developer is trying to persuade me to move
to .net from PHP. I have always disliked the idea because of the expenses.
But he’s tryiong none the less. I’ve been using Movable-type
on a variety of websites for about a year and am anxious about switching to another platform.
I have heard good things about blogengine.net.
Is there a way I can import all my wordpress content into it?
Any help would be really appreciated!
LawrenceCop says:
dark web markets [url=https://monopolymarketonline.com/ ]darknet market lists [/url]
DavidWhaft says:
dark web market https://darkoderebornurl.com/ – dark web sites
BobbyEvinc says:
deep web drug url https://torrezmarketdarknet.com/ – deep web drug url
PedroEvinc says:
tor dark web https://monopolymarketlinks.com/ – deep web drug links
Sirsmuct says:
tor markets 2021 https://darkoderebornmarkets.com/ – darkmarket 2022
Kellydum says:
dark web markets https://heinekenmarket.com/ – darknet drug links
DennyCop says:
darknet market lists https://darkoderebornurl.com/ – darkmarket 2021
Patrickevali says:
darkmarket 2021 https://torrezmarketwww.com/ – bitcoin dark web
Diedraovers says:
drug markets onion https://torrezmarketdarknet.com/ – deep web drug store
Samuelnum says:
dark web link https://darkoderebornonion.com/ – dark web market list
TimKal says:
darknet markets https://heinekenexpresmarket.com/ – tor market url
Williamliacy says:
deep web markets https://darkoderebornlink.com/ – darknet market lists
Versusvurse says:
tor markets 2021 https://versusprojectmarket.com/ – darkmarket
DonnyCop says:
tor market url https://versusdarknetmarket.com/ – darkmarket link
Bobb1Evinc says:
darknet market https://asapmarketonion.com/ – darkmarket 2021
Dylannot says:
best darknet markets https://asapmarketlinks.com/ – darknet market
Rickvurse says:
dark market list https://heinekenexpresshop.com/ – tor market
Ashleybar says:
darknet market list https://torrezmarketurls.com/ – drug markets dark web
Anoldvurse says:
darknet market list https://monopolymarketurls.com/ – darknet drug market
best article generator says:
Hi there, its pleasant paragraph on the topic of media
print, we all be familiar with media is a enormous source of data.
Johnnot says:
tor market links https://cannahomedarkmarket.com/ – dark web markets
JimLib says:
dark market onion https://heinekenexpresonion.com/ – dark web market links
TeddyMip says:
dark web link https://cannahomelink.com/ – darkmarket link
JennyMip says:
dark market https://torrez-market-onion.com/ – dark web market
Josenot says:
deep web drug markets https://monopoly-market-onion.com/ – darkmarket link
Ricconot says:
dark markets 2022 https://torrezmarketlinkwww.com/ – darkmarket 2021
DavidWhaft says:
deep web drug store https://darkoderebornurl.com/ – darkmarket list
BobbyEvinc says:
tor markets 2022 https://torrezmarketurls.com/ – tor market url
DiamondEvinc says:
deep web drug markets https://worldmarketsdarknet.com/ – darkmarket list
Dezzyvurse says:
best darknet markets https://darkoderebornonion.com/ – darknet drug store
LennyCop says:
drug markets onion https://torrez-onion.com/ – darknet drug links
FelixMip says:
deep web drug url https://mymonopolymarket.com/ – darkmarket
Sirsmuct says:
dark0de link https://darkoderebornmarkets.com/ – darkmarket url
Patrickevali says:
darknet market https://torrezmarketwww.com/ – dark market 2022
PedroEvinc says:
dark web drug marketplace https://monopoly-market-onion.com/ – deep web drug url
DennyCop says:
tor markets 2021 https://darkoderebornurl.com/ – darknet market
LawrenceCop says:
tor market https://monopolymarketonline.com/ – darknet market lists
Patricktug says:
tor dark web https://heinekenexpresshop.com/ – dark market 2022
Diedraovers says:
tor markets links https://torrezmarketdarknet.com/ – darkmarket
Williamliacy says:
darkmarket 2021 https://darkoderebornlink.com/ – tor markets 2021
Versusvurse says:
darknet drug store https://versusprojectmarket.com/ – dark market onion
TimKal says:
dark markets 2022 https://heinekenexpresmarket.com/ – dark web markets
Kellydum says:
tor market url https://heinekenmarket.com/ – dark market 2021
Sharylhilla says:
tor markets links https://oniontorrezurl.com/ – dark web market
Bobb1Evinc says:
dark web markets https://asapmarketonion.com/ – tor market links
DonnyCop says:
darkmarket 2022 https://versusdarkmarkets.com/ – deep web drug links
Anoldvurse says:
tor market https://monopolymarketurls.com/ – tor markets 2022
DennyCop says:
deep web drug store https://darkoderebornurl.com/ – dark web market links
Dylannot says:
darknet market list https://asapmarketlinks.com/ – drug markets dark web
JimLib says:
dark web link https://heinekenexpresonion.com/ – dark market 2021
Sirsmuct says:
tor market url https://darkoderebornmarkets.com/ – tor marketplace
Dezzyvurse says:
darkmarket 2022 https://tortorrezmarket.com/ – bitcoin dark web
check out here says:
Exceptional post however I was wondering if you could write a litte more on this subject? I’d be very thankful if you could elaborate a little bit more. Thanks!
DavidWhaft says:
darkmarket 2021 https://darkoderebornurl.com/ – tor markets links
Josenot says:
darknet market lists https://heineken.express/ – dark web market
Johnnot says:
dark market list https://cannahomemarket24.com/ – darknet market lists
DiamondEvinc says:
darknet marketplace https://worldmarketurltor.com/ – dark markets 2022
TeddyMip says:
darknet marketplace https://cannahomeurl.com/ – dark web link
JennyMip says:
deep web drug store https://torrez-market-onion.com/ – deep web markets
Ricconot says:
dark markets 2022 https://oniontorrezurl.com/ – deep web drug url
Patrickevali says:
dark market onion https://torrezmarketwww.com/ – dark market 2021
BobbyEvinc says:
tor dark web https://torrezmarketdarknet.com/ – drug markets onion
LawrenceCop says:
tor marketplace https://monopolymarketonline.com/ – deep web drug url
Samuelnum says:
deep web drug store https://darkoderebornonion.com/ – dark web link
FelixMip says:
dark market 2021 https://mymonopolymarket.com/ – dark web market links
Diedraovers says:
darknet market lists https://torrezmarketonion.com/ – dark web markets
Ashleybar says:
darknet drug links https://torrezmarketurls.com/ – darkmarket 2021
TimKal says:
heineken onion https://heinekenexpresmarket.com/ – dark web markets
Rickvurse says:
tor market url https://heinekenmarket.com/ – deep web drug links
DennyCop says:
dark markets 2022 https://darkoderebornlink.com/ – darknet marketplace
DonnyCop says:
best darknet markets https://versusdarknetmarket.com/ – dark web markets
Versusvurse says:
dark market link https://worldonionmarketplace.com/ – tor market url
Bobb1Evinc says:
darknet drug links https://asap-market.com/ – best darknet markets
PedroEvinc says:
dark market 2022 https://monopoly-market-onion.com/ – darknet market links
Patricktug says:
best darknet markets https://heinekenexpresshop.com/ – deep web drug store
Williamliacy says:
dark web link https://darkoderebornlink.com/ – deep web drug markets
DavidWhaft says:
dark web market https://darkoderebornurl.com/ – dark web link
Anoldvurse says:
tor market links https://monopolymarketwww.com/ – dark web drug marketplace
JimLib says:
heineken onion https://heinekenexpresonion.com/ – drug markets onion
Sirsmuct says:
bitcoin dark web https://darkoderebornmarkets.com/ – dark market
Kellydum says:
drug markets dark web https://heinekenmarket.com/ – darkmarket 2022
Dezzyvurse says:
dark market list https://darkoderebornonion.com/ – best darknet markets
Dylannot says:
darkmarket https://asapmarketurls.com/ – deep web drug store
OzzyMip says:
dark market https://versusdarkmarket.com/ – darkmarket list
LennyCop says:
bitcoin dark web https://torrez-onion.com/ – darknet drug store
Ashleybar says:
darknet market https://torrezmarketurls.com/ – dark market list
JennyMip says:
darknet drug links https://torrez-market-linkss.com/ – darknet drug store
Ricconot says:
darkmarket link https://torrezmarketlinkwww.com/ – tor market
Commercial Slideouts says:
Hi there! I simply would like to give you a big thumbs up for your excellent info you’ve got here on this post. I will be coming back to your website for more soon.
DiamondEvinc says:
darkmarket url https://worldmarketurltor.com/ – tor markets links
LawrenceCop says:
darknet drug market https://monopolymarketonline.com/ – dark market 2021
TeddyMip says:
dark web market links https://cannahome-markets.com/ – darknet drug store
BobbyEvinc says:
deep web drug markets https://torrezmarketonion.com/ – tor market url
TimKal says:
dark markets 2022 https://heinekenexpresmarket.com/ – dark market 2022
DennyCop says:
dark market url https://darkoderebornurl.com/ – tor markets links
coming home outfit|Newborn baby clothes|Newborn girl outfit|Baby coming home outfit|Newborn boy coming home outfit|click here|visit website|this website|for more information|to learn more|for more info|to read more} says:
Moreover, the style originates from your Mercedes Design and style Titanium Chronograph the brand released along with IWC in 1980.
Samuelnum says:
darknet market links [url=https://darkoderebornonion.com/ ]dark0de url [/url]
Rickvurse says:
darknet market lists https://asapmarket-onion.com/ – bitcoin dark web
Josenot says:
tor marketplace https://monopoly-market-onion.com/ – darkmarket 2021
Versusvurse says:
darknet markets https://worldonionmarketplace.com/ – darknet marketplace
FelixMip says:
deep web drug links https://heineken.express/ – dark web markets
DonnyCop says:
dark market link https://versusdarknetmarket.com/ – dark market
Sirsmuct says:
darknet market list https://darkoderebornmarkets.com/ – darknet websites
Anoldvurse says:
tor market url https://monopolymarketurls.com/ – dark web market links
PedroEvinc says:
tor markets 2021 https://monopoly-market-onion.com/ – darkmarket
Patricktug says:
dark market list https://heinekenexpresshop.com/ – darknet drug market
Bobb1Evinc says:
darknet market links https://asap-market.com/ – dark markets 2022
DavidWhaft says:
darkmarket link https://darkoderebornurl.com/ – deep web drug url
Diedraovers says:
dark market 2021 https://torrezmarketonion.com/ – deep web drug store
Patrickevali says:
dark web market links https://torrezmarketwww.com/ – bitcoin dark web
JimLib says:
heineken onion https://heinekenexpresonion.com/ – darkmarket url
Williamliacy says:
deep web drug store https://darkoderebornlink.com/ – darkmarket 2022
LennyCop says:
dark market url https://heinekenexpresmarket.com/ – deep web drug links
Ashleybar says:
deep web drug url https://torrezmarketlinkwww.com/ – drug markets dark web
Kellydum says:
dark market 2022 https://heinekenmarket.com/ – drug markets onion
Dezzyvurse says:
dark web market list https://torrezmarketwww.com/ – darknet market list
Johnnot says:
dark web market links https://caanahome-market-onion.com/ – drug markets dark web
Dylannot says:
deep web drug links https://asapmarketurls.com/ – dark web markets
TimKal says:
deep web drug url https://heinekenexpresmarket.com/ – darkmarket
BobbyEvinc says:
best darknet markets https://torrezmarketurls.com/ – dark web sites
LawrenceCop says:
deep web drug store https://monopolymarketonline.com/ – tor market url
Rickvurse says:
tor markets 2021 https://heinekenexpresshop.com/ – darknet market links
Versusvurse says:
tor dark web https://worldonionmarketplace.com/ – darknet marketplace
JennyMip says:
darkmarket https://torrez-market-onion.com/ – tor markets 2022
DennyCop says:
tor marketplace https://darkoderebornurl.com/ – dark web drug marketplace
Ricconot says:
darknet drug market https://torrezmarketlinkwww.com/ – dark market 2022
DiamondEvinc says:
deep web drug store [url=https://worldmarketlinktor.com/ ]drug markets onion [/url]
TeddyMip says:
tor market https://cannahomeurl.com/ – dark market onion
Samuelnum says:
dark web market https://darkoderebornonion.com/ – dark0de darknet market
DonnyCop says:
tor markets links https://versusdarkmarkets.com/ – deep web drug links
Sirsmuct says:
tor market url https://darkoderebornmarkets.com/ – tor dark web
Sharylhilla says:
drug markets onion https://torrezlinkonion.com/ – tor dark web
Josenot says:
darknet market lists https://heineken.express/ – darkmarket url
PedroEvinc says:
darkmarket list https://monopolymarketlinks.com/ – darkmarket 2022
Williamliacy says:
dark web drug marketplace https://darkoderebornlink.com/ – dark web market list
DavidWhaft says:
darknet market links https://darkoderebornurl.com/ – darkmarket link
JimLib says:
dark market link https://heinekenexpresonion.com/ – tor marketplace
Anoldvurse says:
darknet market links https://monopolymarketurls.com/ – dark web markets
Bobb1Evinc says:
darknet drug market https://asapmarketonion.com/ – dark market onion
Patricktug says:
tor markets 2022 https://heinekenexpresshop.com/ – darknet drug store
Ashleybar says:
darkmarket https://torrezmarketurls.com/ – dark market list
FelixMip says:
darkmarket link https://heineken.express/ – drug markets dark web
LennyCop says:
dark markets 2022 https://torrez-onion.com/ – darknet websites
Dezzyvurse says:
dark market list https://torrezmarketwww.com/ – darkmarket list
Johnnot says:
drug markets dark web https://cannahomedarkmarket.com/ – tor marketplace
TimKal says:
tor markets 2022 https://heinekenexpresmarket.com/ – bitcoin dark web
BobbyEvinc says:
dark market 2021 https://torrezmarketurls.com/ – dark market list
Kellydum says:
dark web market links https://heinekenmarket.com/ – dark web sites
LawrenceCop says:
tor market links https://mymonopolymarket.com/ – darkmarket 2022
Dylannot says:
tor markets 2021 https://versus-markets.com/ – drug markets onion
Versusvurse says:
dark web sites https://worldmarketsonion.com/ – tor dark web
Rickvurse says:
drug markets dark web https://heinekenmarket.com/ – darkmarket list
DennyCop says:
dark market onion https://darkoderebornurl.com/ – tor markets 2022
TeddyMip says:
dark web market links https://cannahome-markets.com/ – dark market link
Sirsmuct says:
darknet drug market https://darkoderebornmarkets.com/ – darkode reborn link
JennyMip says:
deep web drug links https://torrez-market-onion.com/ – darknet marketplace
Sharylhilla says:
darkmarket list https://torrezlinkonion.com/ – tor market links
Ricconot says:
deep web drug url https://torrezlinkonion.com/ – dark market link
Samuelnum says:
dark0de url https://darkoderebornonion.com/ – darknet drug store
DavidWhaft says:
darknet market lists https://darkoderebornurl.com/ – darknet websites
automaticcontentcreator.xyz says:
Hello, I think your blog might be having browser compatibility issues.
When I look at your blog in Chrome, it looks fine but when opening in Internet Explorer, it has some overlapping.
I just wanted to give you a quick heads up!
Other then that, superb blog!
DonnyCop says:
dark web market list https://versusdarkmarkets.com/ – darkmarket list
Williamliacy says:
tor markets 2022 https://darkoderebornlink.com/ – darknet drug market
Patrickevali says:
dark web markets https://tortorrezmarket.com/ – darknet drug links
LennyCop says:
dark market 2021 https://heinekenexpresmarket.com/ – deep web drug links
Josenot says:
dark web market links https://heineken.express/ – tor market url
Ashleybar says:
bitcoin dark web https://torrezmarketurls.com/ – dark web market list
TimKal says:
darkmarket https://heinekenexpresmarket.com/ – dark market list
PedroEvinc says:
darkmarket list https://monopolymarketlinks.com/ – darknet drug links
Dezzyvurse says:
darkmarket url https://torrezmarketwww.com/ – darkmarket link
Anoldvurse says:
deep web drug store https://monopolymarketwww.com/ – dark web drug marketplace
JimLib says:
tor markets links https://heinekenexpresonion.com/ – drug markets dark web
Bobb1Evinc says:
darkmarket 2021 https://asap-market.com/ – dark market url
LawrenceCop says:
darknet drug store https://monopolymarketonline.com/ – darkmarket 2021
Patricktug says:
tor dark web https://heinekenexpresshop.com/ – dark market 2022
FelixMip says:
deep web drug url https://monopoly-market-onion.com/ – drug markets dark web
BobbyEvinc says:
darknet drug market https://torrezmarketonion.com/ – dark market 2021
DiamondEvinc says:
darkmarket url https://worldmarketlinktor.com/ – tor market url
Sirsmuct says:
darkode market https://darkoderebornmarkets.com/ – tor market
Dylannot says:
bitcoin dark web https://asapmarketlinks.com/ – darknet market lists
OzzyMip says:
darknet marketplace https://versus-market-onion.com/ – deep web drug url
Sharylhilla says:
dark web drug marketplace https://oniontorrezurl.com/ – dark market link
Versusvurse says:
darkmarket 2022 https://versusprojectmarket.com/ – darkmarket url
DennyCop says:
dark market list https://darkoderebornurl.com/ – deep web drug markets
Johnnot says:
darknet market links https://cannahomemarket24.com/ – darknet market lists
Rickvurse says:
darkmarket link https://heinekenmarket.com/ – dark web drug marketplace
Kellydum says:
dark web market https://heinekenmarket.com/ – dark market url
Samuelnum says:
darkmarket 2021 https://darkoderebornonion.com/ – darkmarket list
DavidWhaft says:
dark market list https://darkoderebornurl.com/ – dark web link
LennyCop says:
darkmarket list https://heinekenexpresmarket.com/ – tor markets 2022
JennyMip says:
dark market url https://torrez-market-onion.com/ – tor market url
Ricconot says:
dark web link https://oniontorrezurl.com/ – darknet market list
TeddyMip says:
bitcoin dark web https://cannahomelink.com/ – tor marketplace
TimKal says:
darknet market lists https://heinekenexpresmarket.com/ – tor dark web
DonnyCop says:
darknet market https://versus-dark-market.com/ – dark web market links
Dezzyvurse says:
tor market url https://tortorrezmarket.com/ – darknet market lists
Williamliacy says:
darkode reborn https://darkoderebornlink.com/ – dark web link
Ashleybar says:
dark web markets https://torrezmarketlinkwww.com/ – dark markets 2022
bukit jalil property says:
ed pumps – generic medications for erectile dysfunction top erection pills
LawrenceCop says:
dark markets 2022 https://mymonopolymarket.com/ – deep web drug store
JimLib says:
darknet market https://heinekenexpresonion.com/ – dark web market
Anoldvurse says:
tor market url https://monopolymarketwww.com/ – tor markets links
Josenot says:
tor market url https://heineken.express/ – dark market link
Diedraovers says:
dark web market links https://torrezmarketonion.com/ – tor markets 2021
PedroEvinc says:
dark market 2022 https://monopoly-market-onion.com/ – darkmarket list
Sirsmuct says:
dark0de darknet market https://darkoderebornmarkets.com/ – deep web markets
Bobb1Evinc says:
darknet marketplace https://asap-market.com/ – tor market links
Sharylhilla says:
drug markets dark web https://oniontorrezurl.com/ – dark web drug marketplace
DennyCop says:
dark web markets https://darkoderebornmarkets.com/ – darknet market links
Versusvurse says:
dark web market links https://worldmarketsonion.com/ – darkmarket
DiamondEvinc says:
tor markets links https://worldmarketurltor.com/ – darknet markets
automaticcontentcreation.xyz says:
Definitely believe that which you said. Your favorite justification appeared to
be on the internet the simplest thing to be aware of.
I say to you, I certainly get annoyed while people consider worries that they just don’t know about.
You managed to hit the nail upon the top and also defined out the whole thing without having side-effects ,
people can take a signal. Will probably be back to get more.
Thanks
BobbyEvinc says:
dark web market links https://torrezmarketdarknet.com/ – darkmarket link
gildan ultra cotton says:
bactrim cream trimethoprim sulfamethoxazole
LennyCop says:
dark web link https://torrez-onion.com/ – darknet market lists
Johnnot says:
tor market url https://caanahome-market-onion.com/ – tor markets 2022
FelixMip says:
drug markets dark web https://mymonopolymarket.com/ – tor markets links
Rickvurse says:
dark web market list https://asapmarket-onion.com/ – dark web market
Samuelnum says:
dark0de darknet market https://darkoderebornonion.com/ – deep web drug links
DavidWhaft says:
darkode market https://darkoderebornurl.com/ – tor dark web
OzzyMip says:
darkmarket url https://versus-market-onion.com/ – dark web market
Kellydum says:
dark web market links https://heinekenmarket.com/ – dark market list
Patrickevali says:
darkmarket link https://torrezmarketwww.com/ – deep web drug store
Williamliacy says:
tor markets 2022 https://darkoderebornlink.com/ – darknet market lists
Dezzyvurse says:
tor markets 2022 https://torrezmarketwww.com/ – darknet market list
TeddyMip says:
dark web markets https://cannahome-markets.com/ – tor market
DonnyCop says:
darknet websites https://versusdarkmarkets.com/ – tor market
Ashleybar says:
tor market links https://torrezmarketlinkwww.com/ – tor markets 2022
JennyMip says:
tor dark web https://torrez-market-linkss.com/ – dark market url
TimKal says:
darknet drug links https://heinekenexpresmarket.com/ – tor market url
Ricconot says:
tor markets links https://torrezmarketlinkwww.com/ – darknet market links
LawrenceCop says:
tor markets 2022 https://monopolymarketonline.com/ – darknet market links
JimLib says:
darknet markets https://heinekenexpresonion.com/ – darkmarket
Anoldvurse says:
darkmarket 2021 https://monopolymarketwww.com/ – darkmarket link
DennyCop says:
tor market url https://darkoderebornlink.com/ – dark web market
Sirsmuct says:
darknet drug store https://darkoderebornmarkets.com/ – dark web markets
Rickvurse says:
drug markets onion https://heinekenexpresshop.com/ – bitcoin dark web
DiamondEvinc says:
darknet market list https://worldmarketlinktor.com/ – dark market link
Sharylhilla says:
dark market onion https://oniontorrezurl.com/ – darknet drug links
Versusvurse says:
darkmarket url https://worldonionmarketplace.com/ – best darknet markets
Patricktug says:
dark market 2022 https://heinekenexpresshop.com/ – dark web link
LennyCop says:
darknet market https://torrez-onion.com/ – deep web drug markets
Williamliacy says:
bitcoin dark web https://darkoderebornlink.com/ – darknet drug market
Josenot says:
tor market links https://heineken.express/ – deep web drug url
PedroEvinc says:
dark web drug marketplace https://monopolymarketlinks.com/ – darknet drug market
BobbyEvinc says:
darknet drug market https://torrezmarketurls.com/ – darknet drug store
Bobb1Evinc says:
darkmarket 2021 https://asap-market-onion.com/ – tor market
DavidWhaft says:
darknet market list https://darkoderebornurl.com/ – darknet markets
FelixMip says:
dark market 2022 https://heineken.express/ – darknet marketplace
Samuelnum says:
tor market url https://darkoderebornonion.com/ – darkmarket link
Patrickevali says:
darknet drug store https://torrezmarketwww.com/ – darkmarket 2022
Johnnot says:
darknet market lists https://cannahomedarkmarket.com/ – tor marketplace
Dezzyvurse says:
best darknet markets https://tortorrezmarket.com/ – darknet marketplace
DonnyCop says:
deep web drug markets https://versusdarkmarkets.com/ – dark market link
Dylannot says:
darkmarket url https://asapmarketurls.com/ – deep web drug markets
TeddyMip says:
tor market https://cannahomeurl.com/ – dark web drug marketplace
LawrenceCop says:
dark market 2022 https://monopolymarketonline.com/ – darkmarket link
Ashleybar says:
dark web market list https://torrezmarketlinkwww.com/ – darknet drug market
barong slot says:
I love this site – its so usefull and helpfull.|
Kellydum says:
best darknet markets https://heinekenmarket.com/ – deep web drug url
JennyMip says:
dark web market list [url=https://torrez-market-linkss.com/ ]darknet drug links [/url]
https://automaticblogwriter.xyz/ says:
Because the admin of this website is working, no question very quickly it will be renowned, due to its quality contents.
Ricconot says:
dark web market links https://torrezmarketlinkwww.com/ – tor dark web
DennyCop says:
tor market links https://darkoderebornmarkets.com/ – dark markets 2022
Sirsmuct says:
darknet websites https://darkoderebornmarkets.com/ – dark web markets
Anoldvurse says:
darknet market lists https://monopolymarketurls.com/ – darknet websites
Rickvurse says:
dark web link https://heinekenexpresshop.com/ – darknet drug links
Sharylhilla says:
darknet drug links https://torrezlinkonion.com/ – drug markets onion
DiamondEvinc says:
dark market link https://worldmarketurltor.com/ – darknet drug store
Versusvurse says:
darkmarket link https://versusprojectmarket.com/ – dark web markets
LennyCop says:
deep web drug store https://torrez-onion.com/ – darknet market list
Patricktug says:
darkmarket 2021 https://heinekenexpresshop.com/ – darkmarket 2021
Williamliacy says:
tor markets links https://darkoderebornlink.com/ – darknet drug market
DavidWhaft says:
dark market onion https://darkoderebornurl.com/ – darknet market lists
Josenot says:
deep web drug store https://monopoly-market-onion.com/ – tor marketplace
Patrickevali says:
darknet market links https://tortorrezmarket.com/ – deep web drug markets
PedroEvinc says:
darkmarket link https://monopolymarketlinks.com/ – darknet market links
TimKal says:
deep web markets [url=https://heinekenexpresmarket.com/ ]dark web market [/url]
Samuelnum says:
dark0de darknet market https://darkoderebornonion.com/ – tor markets links
Bobb1Evinc says:
deep web drug links https://asap-market.com/ – dark market list
Johnnot says:
tor marketplace https://cannahomedarkmarket.com/ – darknet market list
BobbyEvinc says:
dark market 2021 https://torrezmarketonion.com/ – darknet market
Dylannot says:
darknet websites https://versus-markets.com/ – darkmarket 2021
LawrenceCop says:
darkmarket 2022 https://mymonopolymarket.com/ – darknet market
FelixMip says:
tor marketplace https://mymonopolymarket.com/ – tor dark web
DonnyCop says:
darknet websites https://versusdarknetmarket.com/ – deep web drug url
Dezzyvurse says:
drug markets onion https://torrezmarketwww.com/ – tor market
Diedraovers says:
dark market link https://torrezmarketonion.com/ – dark web markets
Ashleybar says:
dark web markets https://torrezmarketurls.com/ – darkmarket list
DennyCop says:
dark web markets https://darkoderebornlink.com/ – darknet market list
Sirsmuct says:
drug markets dark web https://darkoderebornmarkets.com/ – tor markets 2021
TeddyMip says:
drug markets dark web https://cannahome-markets.com/ – darknet market lists
JennyMip says:
tor market links https://torrez-market-urls.com/ – bitcoin dark web
Rickvurse says:
dark market list https://heinekenexpresshop.com/ – darknet marketplace
Sharylhilla says:
tor market https://oniontorrezurl.com/ – tor markets 2021
Kellydum says:
tor markets 2021 https://heinekenmarket.com/ – darknet marketplace
Ricconot says:
deep web drug store https://torrezmarketlinkwww.com/ – darknet market list
Versusvurse says:
darknet websites https://versusprojectmarket.com/ – tor market url
LennyCop says:
deep web drug links https://torrez-onion.com/ – deep web drug url
Anoldvurse says:
darknet drug links https://monopolymarketwww.com/ – darkmarket
TimKal says:
drug markets onion https://heinekenexpresmarket.com/ – darknet drug links
DiamondEvinc says:
darkmarket list https://worldmarketurltor.com/ – darknet market list
DavidWhaft says:
dark markets 2022 https://darkoderebornurl.com/ – dark0de market
Patrickevali says:
dark market list https://torrezmarketwww.com/ – darknet market lists
LawrenceCop says:
bitcoin dark web https://mymonopolymarket.com/ – deep web markets
PedroEvinc says:
best darknet markets https://monopoly-market-onion.com/ – dark market 2022
Patricktug says:
dark web sites https://heinekenexpresshop.com/ – bitcoin dark web
DonnyCop says:
darkmarket url https://versusdarkmarkets.com/ – darkmarket link
Diedraovers says:
darkmarket https://torrezmarketdarknet.com/ – tor markets 2022
Ashleybar says:
darknet marketplace https://torrezmarketlinkwww.com/ – darknet drug market
OzzyMip says:
dark market 2021 https://versusdarkwebmarket.com/ – darkmarket url
Johnnot says:
darkmarket https://cannahomemarket24.com/ – darknet drug links
DennyCop says:
dark web drug marketplace https://darkoderebornurl.com/ – darkmarket url
Dezzyvurse says:
deep web drug url https://darkoderebornonion.com/ – tor market url
FelixMip says:
dark market list https://monopolymarketonline.com/ – darknet market lists
Sirsmuct says:
drug markets onion [url=https://darkoderebornmarkets.com/ ]tor dark web [/url]
BobbyEvinc says:
deep web drug url https://torrezmarketurls.com/ – tor markets 2021
JamesJAW says:
https://stromectolis.com/# ivermectin 90 mg
TeddyMip says:
dark markets 2022 https://cannahomeurl.com/ – dark web market
Sharylhilla says:
deep web drug store https://oniontorrezurl.com/ – darknet drug market
Rickvurse says:
tor marketplace https://heinekenexpresshop.com/ – dark web market links
LennyCop says:
dark web sites https://torrez-onion.com/ – darknet drug links
Kellydum says:
deep web drug url https://heinekenmarket.com/ – drug markets dark web
JimLib says:
darknet market list https://heinekenexpresonion.com/ – tor market url
JennyMip says:
dark web sites https://torrez-market-linkss.com/ – darkmarket url
DavidWhaft says:
dark market url https://darkoderebornurl.com/ – darkode reborn
Ricconot says:
dark markets 2022 https://torrezmarketlinkwww.com/ – dark web markets
TimKal says:
darknet markets https://heinekenexpresmarket.com/ – darknet drug market
Versusvurse says:
darknet market lists https://worldonionmarketplace.com/ – deep web drug url
Anoldvurse says:
dark web markets https://monopolymarketurls.com/ – darknet market links
LawrenceCop says:
tor market https://mymonopolymarket.com/ – dark web sites
Patrickevali says:
dark market 2022 https://torrezmarketwww.com/ – deep web markets
DiamondEvinc says:
dark web market list [url=https://worldmarketsdarknet.com/ ]drug markets dark web [/url]
Diedraovers says:
darknet market links https://torrezmarketdarknet.com/ – bitcoin dark web
DonnyCop says:
bitcoin dark web https://versus-dark-market.com/ – tor markets 2021
Williamliacy says:
darkmarket https://darkoderebornlink.com/ – darknet markets
DennyCop says:
darkmarket url https://darkoderebornurl.com/ – tor markets 2021
Ashleybar says:
dark market https://torrezmarketurls.com/ – dark market url
Sirsmuct says:
darkode reborn https://darkoderebornmarkets.com/ – tor markets 2021
Samuelnum says:
darknet markets https://darkoderebornonion.com/ – darknet drug market
Bobb1Evinc says:
drug markets dark web https://asapmarketonion.com/ – dark web market list
Patricktug says:
heineken onion https://heinekenexpresshop.com/ – heineken onion
Johnnot says:
darkmarket https://caanahome-market-onion.com/ – tor market
PedroEvinc says:
tor dark web https://monopoly-market-onion.com/ – darknet market links
Josenot says:
bitcoin dark web https://heineken.express/ – dark web market links
Dezzyvurse says:
deep web drug links https://darkoderebornonion.com/ – tor marketplace
BobbyEvinc says:
drug markets onion https://torrezmarketonion.com/ – dark web market list
FelixMip says:
tor markets 2022 https://monopolymarketlinks.com/ – dark web link
LennyCop says:
drug markets onion https://heinekenexpresonion.com/ – dark market url
slot 5000 says:
Your posts is amazingly significant.|
Rickvurse says:
dark market list https://asapmarket-onion.com/ – dark market 2021
Sharylhilla says:
darkmarket url https://oniontorrezurl.com/ – dark market 2022
TeddyMip says:
tor markets 2022 https://cannahomeurl.com/ – darkmarket 2021
TimKal says:
dark markets 2022 https://heinekenexpresmarket.com/ – darknet market links
JennyMip says:
darkmarket url https://torrez-market-urls.com/ – tor markets 2022
JimLib says:
darkmarket 2022 https://heinekenexpresonion.com/ – tor dark web
Ricconot says:
darknet markets https://torrezmarketlinkwww.com/ – darknet websites
Kellydum says:
dark market onion https://heinekenmarket.com/ – deep web drug store
LawrenceCop says:
tor markets 2022 https://mymonopolymarket.com/ – drug markets onion
DavidWhaft says:
darknet drug store https://darkoderebornurl.com/ – darknet markets
Versusvurse says:
darkmarket url https://worldmarketsonion.com/ – dark market onion
Patrickevali says:
best darknet markets https://tortorrezmarket.com/ – tor market links
Sirsmuct says:
darknet websites https://darkoderebornmarkets.com/ – darkmarket list
DonnyCop says:
darkmarket https://versusdarknetmarket.com/ – tor market url
Diedraovers says:
dark market https://torrezmarketonion.com/ – tor market
Anoldvurse says:
tor markets links https://monopolymarketurls.com/ – darknet drug store
Williamliacy says:
dark market link https://darkoderebornlink.com/ – darknet market lists
amazon.com says:
When some one searches for his necessary thing, therefore he/she wants to be available that in detail, so thatthing is maintained over here.
Bobb1Evinc says:
darknet marketplace https://asap-market-onion.com/ – deep web drug markets
Ashleybar says:
dark market url https://torrezmarketurls.com/ – tor dark web
DennyCop says:
darkmarket link https://darkoderebornurl.com/ – darknet websites
DiamondEvinc says:
darknet drug store https://worldmarketsdarknet.com/ – tor dark web
Dezzyvurse says:
deep web drug url https://torrezmarketwww.com/ – dark market
LennyCop says:
dark web markets https://heinekenexpresmarket.com/ – dark market
Patricktug says:
tor markets 2022 https://heinekenexpresshop.com/ – tor dark web
PedroEvinc says:
best darknet markets https://monopoly-market-onion.com/ – darkmarket list
Josenot says:
darkmarket https://monopoly-market-onion.com/ – darknet drug market
Johnnot says:
deep web drug store https://cannahomemarket24.com/ – tor markets 2021
BobbyEvinc says:
darknet marketplace https://torrezmarketdarknet.com/ – darkmarket
FelixMip says:
tor market https://heineken.express/ – bitcoin dark web
Sharylhilla says:
darknet drug store https://torrezlinkonion.com/ – tor markets 2021
TimKal says:
tor markets 2021 https://heinekenexpresmarket.com/ – dark market url
Rickvurse says:
tor market https://heinekenmarket.com/ – dark market link
TeddyMip says:
deep web drug markets https://cannahome-markets.com/ – darknet websites
Sirsmuct says:
dark market url https://darkoderebornmarkets.com/ – dark markets 2022
Versusvurse says:
dark web market list https://worldmarketsonion.com/ – dark market 2022
LawrenceCop says:
drug markets dark web https://monopolymarketonline.com/ – tor dark web
Patrickevali says:
dark web drug marketplace https://torrezmarketwww.com/ – drug markets dark web
JimLib says:
darkmarket url https://heinekenexpresonion.com/ – dark market list
DavidWhaft says:
dark web market list https://darkoderebornurl.com/ – darkode reborn
Kellydum says:
dark market onion https://heinekenmarket.com/ – deep web drug links
Williamliacy says:
dark market 2022 https://darkoderebornlink.com/ – darknet market
DonnyCop says:
dark web drug marketplace https://versusdarknetmarket.com/ – tor market links
JennyMip says:
darkmarket https://torrez-market-linkss.com/ – darknet drug market
Diedraovers says:
tor markets 2022 https://torrezmarketonion.com/ – dark market url
Ricconot says:
darknet market links https://torrezlinkonion.com/ – darkmarket
Anoldvurse says:
dark web link https://monopolymarketurls.com/ – darkmarket
JamesJAW says:
https://stromectolis.com/# ivermectin 1% cream generic
DennyCop says:
darknet websites https://darkoderebornmarkets.com/ – tor market
Ashleybar says:
darknet websites https://torrezmarketurls.com/ – darknet drug links
Bobb1Evinc says:
darknet drug store https://asapmarketonion.com/ – dark market list
DiamondEvinc says:
dark web drug marketplace https://worldmarketlinktor.com/ – deep web drug links
LennyCop says:
tor market links https://torrez-onion.com/ – tor market url
OzzyMip says:
dark market 2021 https://versusdarkwebmarket.com/ – darknet websites
Dezzyvurse says:
tor market links https://darkoderebornonion.com/ – best darknet markets
Patricktug says:
darknet market lists https://heinekenexpresshop.com/ – dark web market links
BobbyEvinc says:
tor markets 2021 https://torrezmarketurls.com/ – darkmarket 2022
PedroEvinc says:
tor markets 2022 https://monopoly-market-onion.com/ – dark markets 2022
Sirsmuct says:
dark market url https://darkoderebornmarkets.com/ – dark market 2021
Sharylhilla says:
tor markets 2021 https://torrezlinkonion.com/ – darkmarket 2021
Josenot says:
best darknet markets https://monopoly-market-onion.com/ – dark web market
Johnnot says:
deep web drug url https://cannahomemarket24.com/ – darkmarket
Rickvurse says:
dark web market links https://heinekenmarket.com/ – darknet websites
JimLib says:
darkmarket https://heinekenexpresonion.com/ – drug markets dark web
Patrickevali says:
dark web sites https://torrezmarketwww.com/ – tor markets 2021
FelixMip says:
darknet drug market https://monopoly-market-onion.com/ – darknet marketplace
Versusvurse says:
darknet markets https://versusprojectmarket.com/ – dark market list
TeddyMip says:
dark market onion https://cannahome-markets.com/ – darkmarket 2021
DavidWhaft says:
deep web drug url https://darkoderebornurl.com/ – dark market onion
DonnyCop says:
tor dark web https://versusdarknetmarket.com/ – dark market onion
DennyCop says:
darkmarket 2022 https://darkoderebornmarkets.com/ – darknet drug links
TimKal says:
darkmarket https://heinekenexpresmarket.com/ – darkmarket
Anoldvurse says:
dark market link https://monopolymarketwww.com/ – deep web markets
Williamliacy says:
dark web market list https://darkoderebornlink.com/ – darkmarket 2021
Samuelnum says:
bitcoin dark web https://darkoderebornonion.com/ – dark markets 2022
JennyMip says:
dark market 2021 https://torrez-market-onion.com/ – deep web drug url
Ricconot says:
darknet drug links https://oniontorrezurl.com/ – dark markets 2022
Ashleybar says:
dark market https://torrezmarketlinkwww.com/ – darkmarket
Kellydum says:
darkmarket list https://heinekenmarket.com/ – darknet market
LennyCop says:
darkmarket 2022 https://heinekenexpresmarket.com/ – dark market 2022
DiamondEvinc says:
darknet websites https://worldmarketurltor.com/ – darkmarket
Dezzyvurse says:
darkmarket 2021 https://tortorrezmarket.com/ – drug markets onion
Dylannot says:
darknet drug store https://versus-markets.com/ – tor market url
OzzyMip says:
darkmarket link https://versusdarkmarket.com/ – darkmarket 2022
Patricktug says:
dark web markets https://heinekenexpresshop.com/ – bitcoin dark web
Sirsmuct says:
darknet markets https://darkoderebornmarkets.com/ – tor dark web
Bobb1Evinc says:
dark market link https://asap-market.com/ – darkmarket 2022
BobbyEvinc says:
dark web market list https://torrezmarketurls.com/ – deep web drug store
Sharylhilla says:
dark web sites https://torrezlinkonion.com/ – deep web markets
Rickvurse says:
darknet market https://asapmarket-onion.com/ – darknet market
www.moneyunder30.com says:
Really enjoyed this blog.Thanks Again. Really Cool.
PedroEvinc says:
dark market list https://monopolymarketlinks.com/ – tor market
JimLib says:
deep web drug url https://heinekenexpresonion.com/ – bitcoin dark web
Josenot says:
darknet marketplace https://monopoly-market-onion.com/ – dark web drug marketplace
DavidWhaft says:
tor dark web https://darkoderebornurl.com/ – deep web drug store
Johnnot says:
tor market https://cannahomedarkmarket.com/ – tor market url
LawrenceCop says:
dark web market https://mymonopolymarket.com/ – deep web markets
DonnyCop says:
darknet drug market https://versusdarknetmarket.com/ – dark market 2021
Patrickevali says:
dark markets 2022 https://tortorrezmarket.com/ – dark web sites
Versusvurse says:
best darknet markets https://worldmarketsonion.com/ – deep web drug store
FelixMip says:
deep web drug url [url=https://mymonopolymarket.com/ ]darknet drug store [/url]
Samuelnum says:
darkmarket link https://darkoderebornonion.com/ – darkode market
TeddyMip says:
dark web markets https://cannahomelink.com/ – tor markets links
TimKal says:
dark web market links https://heinekenexpresmarket.com/ – heineken onion
Diedraovers says:
bitcoin dark web https://torrezmarketdarknet.com/ – darknet market links
DennyCop says:
dark web link https://darkoderebornmarkets.com/ – dark web link
Anoldvurse says:
dark market list https://monopolymarketurls.com/ – deep web drug markets
Ashleybar says:
dark market link https://torrezmarketurls.com/ – tor markets 2022
investorjunkie.com says:
You have a specific talent. Your penning competencies are excellent. Thanks for submitting material on the internet and teaching your audiences.
Dezzyvurse says:
darknet drug store https://torrezmarketwww.com/ – tor markets 2022
LennyCop says:
drug markets dark web https://torrez-onion.com/ – darknet market lists
Sirsmuct says:
dark market onion https://darkoderebornmarkets.com/ – tor marketplace
JennyMip says:
deep web markets https://torrez-market-urls.com/ – tor market links
Ricconot says:
darknet drug links https://torrezmarketlinkwww.com/ – best darknet markets
DiamondEvinc says:
best darknet markets https://worldmarketurltor.com/ – drug markets dark web
Kellydum says:
tor dark web https://heinekenmarket.com/ – best darknet markets
Rickvurse says:
darknet market https://heinekenmarket.com/ – darknet drug links
Bobb1Evinc says:
deep web drug url https://asapmarketonion.com/ – drug markets onion
Sharylhilla says:
tor market https://torrezlinkonion.com/ – best darknet markets
Dylannot says:
darkmarket list https://asapmarketurls.com/ – darknet marketplace
Patricktug says:
deep web drug store https://heinekenexpresshop.com/ – deep web drug store
JimLib says:
deep web drug markets https://heinekenexpresonion.com/ – tor marketplace
DavidWhaft says:
dark market link https://darkoderebornurl.com/ – dark web market
LawrenceCop says:
darknet drug store https://monopolymarketonline.com/ – darkmarket link
OzzyMip says:
dark market onion https://versus-market-onion.com/ – dark market 2022
BobbyEvinc says:
darkmarket 2021 https://torrezmarketdarknet.com/ – deep web markets
Williamliacy says:
dark market https://darkoderebornlink.com/ – dark web markets
DonnyCop says:
drug markets onion https://versus-dark-market.com/ – dark market list
PedroEvinc says:
darknet marketplace https://monopolymarketlinks.com/ – deep web drug url
Patrickevali says:
darknet drug links https://tortorrezmarket.com/ – darknet market links
Versusvurse says:
darknet drug market https://worldmarketsonion.com/ – bitcoin dark web
Josenot says:
tor markets 2022 https://monopoly-market-onion.com/ – darknet market list
Johnnot says:
dark markets 2022 https://cannahomemarket24.com/ – tor markets links
JamesJAW says:
https://stromectolis.com/# cost of ivermectin lotion
TeddyMip says:
bitcoin dark web https://cannahomeurl.com/ – deep web drug url
Diedraovers says:
tor dark web https://torrezmarketonion.com/ – darknet marketplace
DennyCop says:
dark markets 2022 https://darkoderebornmarkets.com/ – tor marketplace
Sirsmuct says:
dark market 2022 https://darkoderebornmarkets.com/ – darkode market
Anoldvurse says:
darknet market list https://monopolymarketwww.com/ – deep web drug url
FelixMip says:
darkmarket 2021 https://monopolymarketlinks.com/ – deep web drug markets
Ashleybar says:
tor markets 2022 https://torrezmarketurls.com/ – deep web drug url
Dezzyvurse says:
deep web drug store https://torrezmarketwww.com/ – darkmarket list
TimKal says:
darknet drug links https://heinekenexpresmarket.com/ – dark market 2022
LennyCop says:
tor dark web https://torrez-onion.com/ – darkmarket
Rickvurse says:
darknet drug store https://heinekenmarket.com/ – tor markets 2021
JennyMip says:
deep web drug store https://torrez-market-linkss.com/ – darkmarket
DavidWhaft says:
darknet drug store https://darkoderebornurl.com/ – tor dark web
Ricconot says:
tor markets 2022 https://torrezmarketlinkwww.com/ – deep web drug store
JimLib says:
dark web market links https://heinekenexpresonion.com/ – darknet drug store
Sharylhilla says:
darknet drug market https://torrezlinkonion.com/ – tor markets 2022
buy azithromycin warnings says:
daarbij azithromycin tablets usp 250 mg camuflaban can you take azithromycin and amoxicillin at the same time buy zithromax-azithromycin – zithromax z pack dosage [url=http://azithromycinx.com/#]zithromax-azithromycin[/url] outcast azithromycin hives
DonnyCop says:
dark web market https://versus-dark-market.com/ – deep web drug links
Kellydum says:
dark web sites https://heinekenmarket.com/ – deep web markets
Bobb1Evinc says:
dark market 2021 https://asap-market-onion.com/ – darknet drug market
Dylannot says:
dark web market https://versus-markets.com/ – darknet market lists
DiamondEvinc says:
drug markets dark web https://worldmarketurltor.com/ – tor markets links
LawrenceCop says:
darknet market links https://monopolymarketonline.com/ – dark web market list
Patricktug says:
tor marketplace https://heinekenexpresshop.com/ – deep web drug links
mmhttvf says:
Папы 2022 смотреть онлайн Папы 2022
Sirsmuct says:
deep web drug store https://darkoderebornmarkets.com/ – tor market url
Williamliacy says:
darknet websites https://darkoderebornlink.com/ – dark market list
Patrickevali says:
dark market url https://tortorrezmarket.com/ – tor markets 2021
OzzyMip says:
dark market 2022 https://versusdarkwebmarket.com/ – darknet drug links
BobbyEvinc says:
dark markets 2022 https://torrezmarketdarknet.com/ – tor markets links
Versusvurse says:
darkmarket https://worldmarketsonion.com/ – darknet drug links
PedroEvinc says:
tor markets links https://monopoly-market-onion.com/ – deep web drug url
DennyCop says:
darknet market lists https://darkoderebornurl.com/ – drug markets dark web
Johnnot says:
dark market link https://cannahomedarkmarket.com/ – dark market 2022
Diedraovers says:
darknet markets https://torrezmarketonion.com/ – darknet websites
TeddyMip says:
darknet markets https://cannahomeurl.com/ – darknet market links
Anoldvurse says:
tor markets 2022 https://monopolymarketwww.com/ – dark market onion
TimKal says:
dark market url https://heinekenexpresmarket.com/ – deep web drug store
Dezzyvurse says:
darknet market list https://darkoderebornonion.com/ – darkmarket 2022
Ashleybar says:
dark web markets https://torrezmarketurls.com/ – darknet market
LennyCop says:
dark markets 2022 https://heinekenexpresmarket.com/ – dark web markets
FelixMip says:
drug markets onion https://monopolymarketwww.com/ – drug markets onion
JimLib says:
darknet markets https://heinekenexpresonion.com/ – darknet drug store
DavidWhaft says:
dark web market https://darkoderebornurl.com/ – tor markets 2022
totobarong says:
I benefit from browsing your web site. Thank you!|
Sharylhilla says:
dark market 2021 https://oniontorrezurl.com/ – dark web market links
Rickvurse says:
dark web market list https://heinekenexpresshop.com/ – tor marketplace
DonnyCop says:
deep web markets https://versusdarkmarkets.com/ – deep web drug markets
Sirsmuct says:
darknet market https://darkoderebornmarkets.com/ – dark0de url
LawrenceCop says:
darkmarket link https://mymonopolymarket.com/ – darkmarket url
JennyMip says:
darkmarket 2021 https://torrez-market-urls.com/ – dark market
Ricconot says:
darkmarket link https://torrezlinkonion.com/ – dark web sites
Williamliacy says:
bitcoin dark web https://darkoderebornlink.com/ – tor market
Bobb1Evinc says:
tor markets 2022 https://asap-market-onion.com/ – darknet market lists
Versusvurse says:
tor marketplace https://worldmarketsonion.com/ – drug markets dark web
Dylannot says:
darkmarket link https://versus-markets.com/ – tor market
Patrickevali says:
best darknet markets https://tortorrezmarket.com/ – tor dark web
Samuelnum says:
dark market link https://darkoderebornonion.com/ – dark markets 2022
BobbyEvinc says:
drug markets onion https://torrezmarketdarknet.com/ – darkmarket
OzzyMip says:
dark web drug marketplace https://versusdarkmarket.com/ – tor markets 2021
DiamondEvinc says:
tor market links https://worldmarketurltor.com/ – deep web drug store
Kellydum says:
bitcoin dark web https://heinekenmarket.com/ – darknet market lists
Sirsmuct says:
darkode reborn https://darkoderebornmarkets.com/ – darknet drug market
Diedraovers says:
darknet websites https://torrezmarketonion.com/ – tor market url
Patricktug says:
dark market 2022 https://heinekenexpresshop.com/ – dark market 2022
Anoldvurse says:
dark web drug marketplace https://monopolymarketwww.com/ – darknet market list
JimLib says:
dark web link https://heinekenexpresonion.com/ – darknet drug links
Dezzyvurse says:
drug markets onion https://torrezmarketwww.com/ – darkmarket 2022
LennyCop says:
darkmarket 2021 https://heinekenexpresonion.com/ – dark web drug marketplace
Johnnot says:
dark market list https://caanahome-market-onion.com/ – best darknet markets
Ashleybar says:
darkmarket 2021 https://torrezmarketlinkwww.com/ – tor dark web
PedroEvinc says:
darkmarket 2022 https://monopoly-market-onion.com/ – darknet market list
Josenot says:
dark web market links https://monopoly-market-onion.com/ – dark market onion
TeddyMip says:
darknet marketplace [url=https://cannahomeurl.com/ ]tor marketplace [/url]
Eletricidade says:
Nice post. I was checking continuously this blog and I am impressed!Very helpful information specifically the last part 🙂I care for such info a lot. I was seeking this certain information for a very long time.Thank you and best of luck.
FelixMip says:
drug markets dark web https://monopolymarketonline.com/ – deep web markets
TimKal says:
drug markets onion https://heinekenexpresmarket.com/ – dark web market
Sharylhilla says:
deep web markets https://torrezlinkonion.com/ – deep web drug markets
DonnyCop says:
dark web link https://versusdarknetmarket.com/ – dark web drug marketplace
Rickvurse says:
dark web link https://heinekenmarket.com/ – deep web drug store
DavidWhaft says:
darknet drug store https://darkoderebornurl.com/ – dark market
Williamliacy says:
dark web drug marketplace dark market 2022
LawrenceCop says:
deep web markets dark market list
Ricconot says:
tor market darknet markets
DennyCop says:
tor markets links dark markets 2022
Versusvurse says:
dark web sites darknet markets
Patrickevali says:
darkmarket link best darknet markets
Sirsmuct says:
darkode reborn tor marketplace
Dylannot says:
darknet markets dark web market
DiamondEvinc says:
deep web drug links tor markets 2022
BobbyEvinc says:
dark market 2022 darknet marketplace
Bobb1Evinc says:
dark web market list drug markets onion
Diedraovers says:
best darknet markets darkmarket list
Anoldvurse says:
darkmarket url tor marketplace
Dezzyvurse says:
tor markets links tor markets 2022
Ashleybar says:
deep web drug links drug markets onion
PedroEvinc says:
darknet market lists darknet drug store
Johnnot says:
darkmarket url darkmarket 2022
LennyCop says:
dark markets 2022 darknet markets
Josenot says:
dark market dark web markets
DonnyCop says:
dark web market dark web sites
Rickvurse says:
darkmarket dark web market links
Versusvurse says:
darknet drug store tor dark web
LawrenceCop says:
dark market list darknet market
Bobb1Evinc says:
dark market list tor marketplace
DiamondEvinc says:
dark market url darknet marketplace
Dylannot says:
darkmarket url dark market 2022
totobarong says:
The info is rather intriguing.|
Anoldvurse says:
darkmarket dark market
LennyCop says:
darknet market list deep web drug url
PedroEvinc says:
drug markets onion deep web drug markets
Johnnot says:
deep web drug store dark market 2022
DonnyCop says:
darknet market lists dark market list
Rickvurse says:
best darknet markets darknet market links
Josenot says:
dark web sites dark web market links
LawrenceCop says:
deep web drug url dark web market
Versusvurse says:
darknet markets drug markets onion
DiamondEvinc says:
darkmarket deep web drug store
Bobb1Evinc says:
tor markets links darkmarket url
Dylannot says:
darkmarket link dark market url
LennyCop says:
deep web drug url deep web markets
Anoldvurse says:
dark market darknet markets
DonnyCop says:
dark market list darknet market links
Rickvurse says:
darknet markets tor markets 2022
PedroEvinc says:
dark web market dark market onion
Johnnot says:
tor dark web dark market 2022
LawrenceCop says:
darknet market tor market url
Josenot says:
deep web drug markets deep web drug store
Versusvurse says:
best darknet markets deep web markets
Bobb1Evinc says:
bitcoin dark web deep web drug markets
DiamondEvinc says:
tor market darknet websites
Anoldvurse says:
tor markets links dark market 2021
yoga on line says:
Aw, this was a really nice post. Taking the time and actual effort to make a top notch article… but what can I say… I put things off a lot and never manage to get nearly anything done.
suplementos de proteinas says:
It’s in reality a nice and helpful piece of info. I am satisfied thatyou simply shared this helpful information with us.Please keep us informed like this. Thank you forsharing.
aptis online says:
Thanks , I’ve recently been searching for information about this topic for a while andyours is the best I’ve discovered so far. But,what in regards to the conclusion? Are you certain in regards to the source?
TimothyBow says:
https://clomiphene1st.com/# no prescription clomid
cheap clomid
Truck And RV Repair Near Me says:
Oh my goodness! Amazing article dude! Thank you so much, However I am having problems with your RSS. I donít know the reason why I can’t subscribe to it. Is there anyone else having identical RSS problems? Anyone who knows the solution will you kindly respond? Thanx!!
m?c khén says:
Thanks a lot for the blog post.Really thank you! Great.
TimothyBow says:
https://clomiphene1st.com/# clomid buy online
clomid buy
barong slot says:
Merely desired to tell you I’m ecstatic I happened in your website!|
TimothyBow says:
https://clomiphene1st.com/# clomid purchase online
clomid price
yjgtvdt says:
Ukraine Kiev news news today from Ukraine
Camper And RV Repair Near Me says:
A motivating discussion is definitely worth comment. There’s no doubt that that you need to publish more on this topic, it might not be a taboo matter but typically people don’t discuss such issues. To the next! Many thanks!!
what doe cialis look like says:
cialis kopen jump to online cialis pharmacy cialis half life – cheapest cialis without a prescription [url=http://gtadalafil.com]how
much does cialis cost[/url] cheap generic cialis usa without prescription
article creation software says:
I was able to find good advice from your blog posts.
article writer generator says:
Hello! I could have sworn I’ve been to this blog before
but after going through many of the articles I realized it’s new to me.
Nonetheless, I’m definitely delighted I found it and I’ll be book-marking it and checking back regularly!
article creator online says:
Ahaa, its nice discussion concerning this
piece of writing here at this blog, I have read all that, so at this time me also commenting at this
place.
article generator software says:
Hey There. I found your blog using msn. This is a really well written article.
I’ll make sure to bookmark it and come back to read more of your useful info.
Thanks for the post. I’ll certainly return.
automatic content generator says:
Yes! Finally something about you.
internet światłowodowy cena says:
Fine way of telling, and pleasant post to obtain facts
regarding my presentation focus, which i am going to present in school.
internet światłowodowy says:
I savor, lead to I discovered just what I was having a look for.
You’ve ended my 4 day lengthy hunt! God Bless you man. Have a great day.
Bye
hydroxychloroquine banned says:
dient where to buy ivermectin prawdziwa is stromectol fda
approved for lice hydroxychloroquine for sale
– stromectol dosage for dogs [url=http://hydroxychloroquine200mg.com/#]can you buy hydroxychloroquine over the counter[/url] fouiller
ivermectin 1.87 dosage for cats
nulled themes says:
I enjoy reading through an article that can make men and women think.
Also, thank yoou forr allowing me to comment!
Have a look at my webpage; nulled themes
sex sohbet says:
What’s up mates, its great paragrraph on the topic of tutoringand completely explained,
keep it up all the time.
Also visitt my web page; sex sohbet
Sohbet Odalari says:
Great weblog right here! Additionally your website quite a bit up veey fast!
What host are yoou the usage of? Can I am getting your
associate hyperlink for your host? I wish my website loaded up as
fast as yours lol
Allso visit my site … Sohbet Odalari
periyodik bakım says:
Günümüzde pratik yaşantıda aktkf olarak kullanılan ve belirli bir üretim zincirinin içerisinde yer alan her teknik aygıtın, aracın ve makinenin kullanım
ömrünü uzatmak için periyodik bakım önerilir.
Kullandığımız teknik aygıtların, araçların ve makinelerin tüketim sürelerini uzatmak için üretici firmaların belirli başlı önerileri vardır.
Araç üreticisi firmalar da kendi ürettikleri araçlar için yılda bir veyahut
yıl içerisinde belirl aralıklarla araç bakımı için önerilerini belirtir.
pg says:
Online lot. Yes, easy job. Deposit withdraw with automatic system. Jet Pot is easy to break, fast and there are many new games to play, free trials, no credit limit. pg519ทางเข้า
Stockholm uit La Casa de Papel Esther Acebo heeft een says:
Güncel ve son dakika Caney Caney haberleri bu sayfa
üzerinden takip edebilirsiniz. Caney Caney ile
ilgili son dakika yaşanan haberleri ve haber başlıklarının tamamı ’de.
bedava penza sex izle says:
Yasli amca turbanli karisini sikiyor (Turkish) Mature Mom Turkish.
Related Videos. Show. TURBANLI SHOW. Amateur 18 Year Old Twerking Turk.
turk turbanli twerk yaparsa hijab. tits turkish boobs couple.
639bcee947.240. Doggy Style Turkish HD Videos. Turkish domaltmis sikiyor.
British Paki Inch British Girl Xxx Girl.
Fresh Tube Porn Azgin Teyze says:
Oral Sex Porno; Gizli Çekim Porno; Konulu Sex; By porno43
3 gün önce Türk Porno 5 İzlenme Paylaş Tweet on Twitter
Share on Facebook Google+ Pinterest. Iki adam tutuyo diğeri sikiyor video şımarık yeğenini sikiyor kaynanasını siken köylü türk
adult özel yerli ünlüler döverek seks yapan videoları.
Hizmetiçi Porna Türkçe says:
Evcil hayvanlar ile kadınlar pornosu izle araması için 695⭐ porno filmi listeniyor.
En iyi evcil hayvanlar ile kadınlar pornosu izle sikiş videoları 7DAK ile,
kaliteli sikiş videoları, türkçe izlenme rekoru kıran seks izle.
7 338.075 Video.
anne kızı oğlu sex says:
Turkish Sexy Girls (Türk İfşa) @turkifsa_tele 🔱💦 Mükemmel göğüslü berra snapchat filtreli fotoğraflarıyla sevgilisini
coşturuyor ağır tavsiyemdir (+4 video mevcut)💦🔱.
yeşilçam sibel tecavüz youtube says:
Watch Sally Squirt porn videos without misleading links.
IXXX movie tube is the free resource for ⭐ high quality porn ⭐ Sally Squirt in Sally Squirt fucking in the desk with her small natural tits Like Dislike Close.
3 weeks ago. Frprn. No video available 5:
00. Twin associate’s sisters handjob Sally gets Dicked down!
FakeTaxi Esmer aşağı topları anal yapar Porno says:
Bu şanslı genç kadın amcığını ünlü Nina Hartley’e sunuyor,
o da düzgün bir şekilde klitorise nasıl davranılacağı konusunda ders
veriyor.
Und says:
I feel this is amohg the such a lot vital info for me. And i am glad reading your
article. However should commentary on few basic issues, Thee website taste is
great, the articles is actually nice : D.
Just right activity, cheers
Here is my webb page; Und
Chesterfield fiyatı says:
Thanks a lot for sharing this with all of us you
actually recognise hat you are speaking approximately!
Bookmarked. Please also talk over with my site =).
We will have a hyperlink change arrangement
betweeen us
Visit my homepage; Chesterfield fiyatı
Mercedes Kamyon says:
hi!,I love your writing very so much! share we keep
in touch extra about your article on AOL? I need a speciakist in this house to
unravel my problem. Maybe that is you! Having a look forward to see
you.
Check out my blog post: Mercedes Kamyon
https://bestbitcoincasino.review says:
Tһis post ցives clear idea designed for tһe new usеrs of blogging,
tһat in fact how to dо blogging аnd site-building.
My blog Slotum Casino Review (https://bestbitcoincasino.review)
SarıYer KıNa Salonları says:
Düğün hazırlıkları yapan birçok çift, öncelikle hayallerindeki gibi bir nişan kutlaması
yapmak ister. Günümüzde oldukça popüler olan nişan kutlamaları için, ev konsepti dışına çıkıp düğün salonu büyüklüğünde mekanlar tercih edilmektedir.
Özellikle nişanda çok sayıda davetlisi
olan aileler SarıYer KıNa Salonları nişan yerleri olarak ferah,
geniş ve konforlu salon arayışı içine girerler.
ikinci el eşya alımı says:
Greetings! I know this is kinda off topic but I was wondering whih blog platform are you using for
this website? I’m getting tired of WordPress because I’ve had issurs
with hackers and I’m looking at optios for
another platform. I would be great if you could point me
in the direction of a good platform.
Feel free to visit my log post; ikinci el eşya alımı
Margret says:
Really lots of superb data.
Here is my blog post; can i purchase cheap lyrica without insurance (https://lyrica2all.top)
arena simulation says:
I enjoy, cause I found exactly what I used to be having a look for.
You’ve ended my 4 day long hunt! God Bless you man. Have a nice day.
Bye
My homepage: arena simulation
russian lip augmentation technique says:
Hi there! I could have sworn I’ve been to this blog before but after cuecking through some of the
post I realizesd it’s new to me. Nonetheless, I’m definitely
delighted I found it and I’ll be bookmarking and
cbecking back frequently!
Feel free to visit my web-site :: russian lip augmentation technique
Tuyet says:
With thanks, Excellent information.
Review my webpage … https://levaquin4us.top
tiktok takipçi satın al says:
Woah! I’m really digging the template/theme of ths website.
It’s simple, yet effective. A lot of tikes it’s difficult to get
that “perfect balance” between usability and visual appearance.
I must say that you’ve donje a great job with this.
Also, the blog loads super fast for me on Opera. Exceptional Blog!
my blog tiktok takipçi satın al
성인망가 says:
Hi, I do believe this is a great website
“성인망가” I stumbledupon it 😉 I may revisit once again since I bookmarked it. Money
and freedom is the greatest way to change, may you be rich and continue to guide other people.
Evden Eve Nakliyat says:
I have read so many contentt on the topic of the
blogger lovers however this piecxe of writing is in fact a fastidious piece of writing, kee it up.
Also visit mmy website … Evden Eve Nakliyat
Ankara ürün Fotoğraf Çekimi says:
Pretty nice post. I just stumbled upon your weblog and wanted to say that I’ve truly enjoyed browsing your blog posts.
After alll I’ll be subscribing to your feed and I hoppe you write
again soon!
my web-site :: Ankara ürün Fotoğraf Çekimi
Dijital pazarlama Firma says:
You actually make it seem so easy with your
presentation but I find thiss topic tto be actually something which I feel I would by noo means understand.
It kind of feels too complex and extremely large for me. I’m having a look
ahead in your subsequent publish, I wiull try to get the danvle of
it!
Feel free tto visit my webpage … Dijital pazarlama Firma
kruunajaisasu lähdette says:
Hey I am so glad I found your web site, I really found you by error, while I was researching on Bing
for something else, Regardless I am here now and would just like to say kudos for a incredible post and a all round thrilling blog (I also
love the theme/design), I don’t have time to
read it all at the moment but I have bookmarked it and also added in your
RSS feeds, so when I have time I will be back to read a great deal more, Please do keep up
the awesome job.
Böcek arama says:
Greetings! Thiis is my first visit to your blog! We arre a collection of volunteers and starting a new initiative in a
community in thhe same niche. Your blog provided us valuable information to work on. You have done a marvellous job!
My blog post: Böcek arama
izmir otomatik pergola fiyatları says:
hello there and thank you for your info – I’ve definitely picked upp something new from right here.
I did however expertise somme technical points using this web site, since
I experienced to reload the site many times previous to I
could get it too load properly. I had been wondering if your web hosting
is OK? Not that I’m complaining, but sluggish loading instances times will often affect your placement in google and could damage your high quslity
score if advertising and marketing with Adwords. Anyway I am
adding this RSS to my email and could look out for much
more of your respectivee fascinating content. Make sure you
update this again very soon.
Also vixit my web site :: izmir otomatik pergola fiyatları
oyun haberleri says:
Howdy! This blog post could not be written aany better!
Reading through this article remind me of my previous roommate!
He constantly kept talking about this. I am going to forward this post to him.
Pretty sure he’ll have a good read. Thank you foor sharing!
my webbpage – oyun haberleri
sohbet sitesi says:
Have yyou ever considered creating an ebook or guest authoring oon other blogs?
I have a blog based upon on the same topics you discuss and would really like to
hwve you share some stories/information. I know my subscribers would vawlue your work.
If you’re evn remotely interested, feel free to shoo me an e mail.
Alsoo visit my website … sohbet sitesi
hametan krem says:
I ddo not even know how I endedd up here, but
I thouvht this post was good. I don’t know who you are but
certainly you are going tto a famous blogger if you aren’t
already 😉 Cheers!
my web page; hametan krem
En iyi medya panel says:
Heyya i am for the first time here. I found this board and I in finding
It truly helpful & itt helped me out a lot. I’m hoping to give one thing
back and aid others suich aas you helped me.
My webpage; En iyi medya panel
Otomatik BahçE KapıSı says:
Ahaa, its nice dalogue regarding this piece of writing at
this place at this website, I have reaad all that, so now
mme also commenting here.
My blog :: Otomatik BahçE KapıSı
Kepenk izmir says:
Hello there! I know this is kind of off opic butt I was woondering if you knesw wheee I could find a captcha plugin for my comment
form? I’m usig the same blog platform as yours and I’m having difficulty finding one?
Thanks a lot!
Also visit my blog post Kepenk izmir
Voyage Organisé Turquie Tout Compris says:
In fact when someoone doesn’t understand then its up to other visitgors
that they will assist, so here it happens.
Allso visit my homepage Voyage Organisé Turquie Tout Compris
Dijital kartvizit oluşturma says:
umarım bu gibi güzel projeleri destekleyerek eski tip kartvizitlerin doğaya verdiği hasarı ortadan kaldırabiliriz.
Heree is my page: Dijital kartvizit oluşturma
Bryan says:
You actually said this well!
Here is my homepage … https://mobic2all.top
Marko says:
Volte la tua salute dovrebbero venire prima di tutto ma anche tanta massa muscolare il processo. Una miscela di miele e di grassi dato che questo molte volte necessita. Dato di fatto si tratta Vediamo altrettanto brevemente come funziona la dieta mediterranea e un dimagrimento innaturale. La Garcinia Cambogia giornaliero di librarsi in breve tempo possibile ma vi darò piani di dieta dimagrante. Oltre questa stupida odiosa tortura è possibile. L’impegno è possibile richiedere un prodotto unico. Prendilo 30 e i minori di 18 anni possono utilizzare il prodotto brucia grassi. Senza eccedere con il lavoro del colon e dall’altro riduce l’assorbimento dei grassi alimentari. Una scarsa reattività dell’apparato digerente può rallentare il processo di combustione dei grassi pre-esistenti. NUTRAVITA è un minimo di attività fisica esistono altri modi per attrezzare e aumentare l’attività brucia grassi. Ascolta il tuo cuore e cerca di fare attività fisica ed essere pazienti. 7 giorni con un rimborso per i diabetici pazienti frutti accettabili per il mantenimento continuo e. Zotrim è progettato per dare il cibo spazzatura e numerosi spuntini a metà. Per renderti responsabile attenersi a diete.
È essenziale bere solo trasformando in un gruppo placebo e in più provoca effetti collaterali di diete. Questa formulazione ha molti effetti collaterali come danni al fegato e del pancreas alla riduzione del grasso. Sono andato in tre giorni sono lo stress innesca il rilascio di grasso immagazzinato. La gamma di prodotti nei tre aminoacidi considerati essenziali ossia che a cena. Prodotti come il formula 1 è probabilmente la migliore pillola di perdita del grasso. Tagliate il cipollotto la scorza di limone e zenzero per la perdita di massa. PUREZZA testata in laboratorio testato in laboratorio testato in laboratorio in modo indipendente per la nostra salute. Ovvero fare esercizio fisico regolare sono i veri segreti per mantenere la tua figura. Dopo l’esercizio fisico Bevi molta energia a ridurre l’appetito migliorare la digestione dei carboidrati. Mangiare la minestra fino a digerire e scomporre i carboidrati sono necessari diversi giorni. Questo aiuta a bruciare i sintomi possono far Sì che le ossa sono deboli e spossate.
E vietata la riproduzione anche se gli integratori sono sicuri per la vostra silhouette molto più snella. Zahra Thunzira is a town in Italia gli integratori possono aiutare a perdere peso. 10.1038/oby.2011.76 Epub 2009 Oct 9 del loro peso corporeo è una formula INNOVATIVA e completa la. L’unica soluzione è utilizzato in passato facevamo prendere peso e aiutandoti a bruciare calorie. Non dovete preoccuparvi della dieta e all’attività fisica possa determinare una perdita di peso. Consulti la tabella scegliere meglio pillole di reduslim prezzo (https://it.reduslim.health/) si dimostra pratica dell’attività fisica. Con così tante pillole dimagranti potenti presenti in queste pillole dimagranti che si basano. Cosa rende Phenq superiore rispetto ad altre pillole di perdita drastica dei chili. In 23 anni di dieta di 3 mesi si è trasferita a 213 chili di peso. Importantissima in stato interessante o persone affette da obesità sottoposte a una dieta chetogenica. Green Barley Plus capsule per la dieta che ha il suo corso per aiutarti. E un programma più lungo termine combinato con una dieta adeguata e sana la riduzione di liquidi. In prima battuta per i benefici del peperone nella perdita di peso così come l’impatto che.
Nel suo insieme dovrebbe portare alla perdita di peso lavorare sodo e non mollare. Ho ottenuto uno sconto per questo sempre di utilizzare nel 2004 a causa di problemi di benessere. No no non sono stati sottoposti a studi clinici per garantire la riservatezza spiega. Vi sono alcuni che favorisce il corpo possa focalizzarsi primariamente sul mantenere quella persona in vita. Come tutti sappiamo è pieno di tutti ovviamente è quello di rendere più veloce il vostro corpo. Aiuta il corpo qualche giorno infatti le Conclusioni di una tazza di riso integrale. Banda blu scuro e testa e corpo di colore scuro dolore addominale e perdita di peso ideale. Il flacone contiene la miscela esclusiva lavora in perdita di peso senza lo sport e l’esercizio. In seguito approfondiremo ogni fase le donne o gli uomini non si può fare. Durante gli allenamenti in fluidificanti del sangue o sul farmaco che riduce la. I medici lo sconsigliano Tuttavia perché il corsetto stretto frena l’appetito si sa.
stresser says:
I believe this is among the most vital information forr me.
Annd i am satisfied studying your article. However should statement on some basic things, The web site taste is wonderful, the articles iss in point of fact excellent :
D. Juust right task, cheers
My web blog; stresser
Cedric says:
Nicely put. Thanks a lot!
my web-site … https://lessons.sciren.org/2023/01/02/schnell-abnehmen-mit-diesen-tipps-schmelzen-die-pfunde-5/
sesli siteler says:
Hi! Do you use Twitter? I’d like to follow you if that would be ok.
I’m undoubtedly enjoying your blog annd look forward
to new posts.
Here is my blog – sesli siteler
Bettina says:
Helpful tips, Cheers.
My blog post … http://bit21.net/bbs/board.php?bo_table=free&wr_id=20895
striplife.ru says:
striplife.ru
Дисциплина says:
Дисциплина
Ernestina says:
Great facts, Regards!
My web page https://www.pinterest.com/slivsignalov126/
dolpsy.ru says:
dolpsy.ru
nakushetke.ru says:
nakushetke.ru
lastduel.ru says:
lastduel.ru
Lora says:
Kudos. An abundance of data.
Feel free to surf to my web blog: http://dk-krepovsky.ru
k-tv.ru says:
k-tv.ru
1029 says:
1029
1741 says:
1741
1234 says:
1234
1046 says:
1046
1553 says:
1553
паническая атака симптомы у женщин says:
паническая атака симптомы у женщин
artist-bio.ru says:
artist-bio.ru
кровь фильм 2023 трейлер says:
кровь фильм 2023 трейлер
чебурашка фильм 2023 offtv one says:
чебурашка фильм 2023 offtv one
Экспромт says:
Экспромт
Парик says:
Парик
Jacquie says:
Valuable knowledge, Regards!
Stop by my web blog; http://gzj.huanghunniao.com/home.php?mod=space&uid=543853&do=profile&from=space
майерс бриггс типы личности says:
I’m truly enjoying the design and layout of your blog.
It’s a very easy on the eyes which makes it much more pleasant for me to come here and
visit more often. Did you hire out a developer to create
your theme? Fantastic work!
Vernita says:
Factor clearly taken!!
Also visit my web page; https://seroquel2all.top
Tomas says:
Wonderful data, Thanks.
Also visit my web blog buy cheap zovirax pill – https://zovirax4us.top –
kleurplaat unicorn makkelijk says:
I do not know if it’s just me or if everyone else
encountering issues with your blog. It appears like some of the written text on your content are running off the screen. Can someone else please provide feedback and let
me know if this is happening to them too? This may be a
issue with my internet browser because I’ve had this happen before.
Thank you
My web blog: kleurplaat unicorn makkelijk
Где найти психолога says:
Где найти психолога
Ортодоксальность says:
Ортодоксальность
Артикуляция says:
Артикуляция
Epifania says:
La risposta, stando al parere degli esperti, alle recensioni degli utilizzatori e all’analisi degli ingredienti è altamente positiva. Una corretta posologia di Reduslim prevede l’assunzione di una sola pillola al giorno, da ingerire preferibilmente con un bicchiere d’acqua, senza mai eccedere nel dosaggio, in quanto la formulazione ed il bilanciamento degli ingredienti sono pensati per agire nell’arco di 24h come una macchina perfetta, che non deve assolutamente essere modificata. Reduslim prevede l’assunzione di una pillola al giorno, accompagnata da un bicchiere d’acqua. Grazie all’assunzione di questo integratore è possibile facilitare un effetto metabolico “brucia grassi” in grado di trasformare i grassi corporei in energia, ovviamente purché l’assunzione sia coadiuvata da una corretta e sana alimentazione. Alla base del grande successo di questo team di professionisti vi è sicuramente il fatto che abbiano ottenuto un mix ideale scegliendo prodotti naturali totalmente sicuri come ad esempio: la caffeina (favorisce la combustione del grasso), il Coleonolo e l’estratto di Verde (aiuta la graduale perdita di peso), radice di Yacon (aiuta il benessere intestinale), pepe nero e pepe di Cayenna (supportano la combustione dei grassi), cromo (contrasta il senso di appetito) e lipasa (enzimi che facilitano la digestione).
Tra gli ingredienti presenti in Reduslim ci sono: caffeina anidra, Coleus forskohlii, pepe nero, pepe della cayenna, Acetil L Carnitina, Chromium, estratto di radice di Yacòn, lipasi e proteasi. Il Pepe della Cayenna blocca la formazione degli adipociti e permette di ridurre gli ammassi grassi. I grassi vengono bruciati in modo più efficace, il processo di dimagrimento è più rapido, gli ammassi grassi vengono bloccati. Questo permette al nostro corpo di bruciare più calorie e di evitare l’accumulo di grassi in eccesso, supportando il processo di dimagrimento. Capacità di avviare un processo termogenico di scioglimento dei grassi. Reduslim è un integratore dimagrante che è in grado proprio di intervenire sul processo di immagazzinamento dei grassi. Inoltre, questo integratore è stato progettato per bruciare i grassi in modo efficace, velocizzare il metabolismo e diminuire l’appetito. Reduslim è efficace, anche molto bene e senza alcuna controindicazione, se associato ad uno stile di vita sano, equilibrato e a uno stile di vita contraddistinto da una regolare attività motoria. In questo quadro si è diffuso un notevole interesse per Reduslim, un prodotto che sta riscuotendo molto successo. Gli integratori dimagranti in questi ultimi due anni sono stati al centro di un notevole interesse da parte dell’opinione pubblica e degli utilizzatori sempre crescenti come numero.
Per affrontare questo problema, molte persone ricorrono a pillole dimagranti e integratori dimagranti per aiutare a perdere peso e migliorare l’aspetto fisico. Perdere peso e migliorare l’aspetto fisico può essere difficile e frustrante. Secondo una ricerca, il 78% delle persone che hanno problemi di peso soffrono di bassa autostima e il 72% si sente insicuro a causa del proprio aspetto fisico. Reduslim è un integratore alimentare a base di ingredienti naturali che aiuta a combattere i problemi legati al sovrappeso e al dimagrimento. Reduslim è una soluzione innovativa che mira a risolvere i problemi legati al sovrappeso, come non entrare nei vestiti e non sentirsi a proprio agio con il proprio corpo. Perché non ci piace essere in sovrappeso, non entrare nei nostri vestiti e non sentirci a nostro agio con il nostro corpo? Ludovica, 32 anni: dopo il parto non riuscivo a perdere i chili che avevo preso anche perché avevo continui attacchi di fame a tutte le ore.
Anche se l’Reduslim potrebbe avere le carte in regola, finora il fornitore non ha fatto la sua apparizione a “Die Höhle der Löwen”. Ricordiamo un’ultima volta di comprare il il prodotto sul sito ufficiale in modo da avere una garanzia sulla qualità del prodotto. Reduslim è disponibile solo sul sito ufficiale del produttore. L’eccesso di peso non solo influisce negativamente sull’aspetto fisico, ma può anche aumentare il rischio di malattie come diabete e cardiache. Reduslim non solo aiuta a sentirsi più in forma e più sani, ma anche a migliorare la salute generale. Non solo i consumatori, ma anche i nutrizionisti dicono positivamente sui farmaci. Inoltre, Reduslim per dimagrire anche un’azione di blocco degli zuccheri, in modo da ridurre l’assorbimento dei carboidrati, impedendo così l’accumulo di grasso. Funziona principalmente nello stomaco e nell’intestino tenue per aiutare la digestione del cibo e l’assorbimento dei nutrienti essenziali. Reduslim è quindi sicuro per l’organismo nell’utilizzo, considerato soprattutto la naturalità del prodotto e la sua capacità di non portare acidità di stomaco o altre controindicazioni di qualsiasi genere. Essendo un prodotto interamente naturale, Reduslim è adatto a tutti, senza particolari controindicazioni. Gli ingredienti unicamente di tipo naturale sono un valore aggiunto notevole che permette di stabilire che si tratta di un integratore sicuro, privo di effetti collaterali o controindicazioni per la salute.
Stop by my homepage: http://wiki.rmtelecom.ru/index.php?title=Come_Perdere_Peso_Velocemente_In_Una_Settimana
"https://diigo.com/0rlqhi says:
Hi, I think your website might be having browser compatibility issues.
When I look at your blog in Safari, it looks fine but when opening in Internet Explorer, it has some overlapping.
I just wanted to give you a quick heads up! Other then that, terrific
blog!
Also visit my blog “https://diigo.com/0rebep
Nichole says:
Regards! Useful information.
Dorthy says:
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
Look into my website; https://obuchenie-cleaning-1.ru/
mgfmail.ru says:
mgfmail.ru
mgfmail.ru says:
mgfmail.ru
www2022.ru says:
www2022.ru
company-blog.ru says:
company-blog.ru
Loretta says:
You made your point quite well!!
Feel free to surf to my web blog my blog (https://purplish-shrimp-dlx12l.mystrikingly.com/)
Pilar says:
You actually revealed this exceptionally well!
My blog https://freedubstudio.club/user/ClaritaShillings/
Nick says:
Fascinating blog! Is your theme custom made or did you download
it from somewhere? A design like yours with a few simple
tweeks would really make my blog shine. Please let me
know where you got your design. Bless you
Nick Andreev says:
An outstanding share! I have just forwarded this onto a
colleague who has been doing a little homework on this.
And he in fact ordered me dinner due to the fact that
I found it for him… lol. So allow me to reword this….
Thanks for the meal!! But yeah, thanx for spending time to talk about this topic here
on your website.
스웨디시 says:
A fascinating discussion is definitely worth comment.
I do believe that you should publish more on this subject matter,
it might not be a taboo subject but usually people don’t talk about such topics.
To the next! Best wishes!!
Charis says:
You made the point!
Feel free to surf to my website – https://raskrutka.clan.su/go?https://sada–color-maki3-net.translate.goog/bbs/bbs.cgi%3Fpage=0&pid=27&con=099&_x_tr_sch=http&_x_tr_sl=auto&_x_tr_tl=en&_x_tr_hl=vi
출장마사지 says:
Excellent post. Keep writing such kind of info on your site.
Im really impressed by your site.
Hey there, You’ve performed a great job.
I will definitely digg it and personally suggest to my friends.
I am confident they will be benefited from this site.
출장 says:
Howdy very nice web site!! Guy .. Beautiful .. Superb .. I’ll
bookmark your web site and take the feeds also? I am satisfied to search out numerous helpful information right here
in the submit, we need work out extra techniques on this regard, thanks for sharing.
. . . . .
출장마사지 says:
I was able to find good info from your content.
스웨디시 says:
Howdy! Do you use Twitter? I’d like to follow you if that would be ok.
I’m absolutely enjoying your blog and look forward to new posts.
Architect says:
Its like you read my thoughts! You seem to grasp a lot about this, such as you wrote
the ebook in it or something. I feel that you simply could do with some p.c.
to drive the message home a bit, however other than that,
this is excellent blog. An excellent read. I’ll definitely be back.
출장 says:
Hey there! I know this is kind of off topic but I was wondering if
you knew where I could get a captcha plugin for my comment form?
I’m using the same blog platform as yours and I’m having trouble finding one?
Thanks a lot!
출장안마 says:
Good day! I know this is somewhat off topic but I was wondering which
blog platform are you using for this website? I’m getting
tired of WordPress because I’ve had issues with hackers and I’m
looking at options for another platform. I would be awesome if
you could point me in the direction of a
good platform.
출장 says:
I am curious to find out what blog system you are utilizing?
I’m experiencing some small security issues with my latest website and I would like to find something more
safeguarded. Do you have any recommendations?
출장안마 says:
Nice post. I learn something new and challenging on websites I stumbleupon on a daily basis.
It’s always exciting to read articles from other authors and use a little something from their web sites.
출장마사지 says:
I have been surfing online greater than three hours lately, yet I never
found any fascinating article like yours. It is beautiful price sufficient
for me. Personally, if all webmasters and bloggers made excellent content as you probably did, the
internet might be a lot more helpful than ever before.
출장안마 says:
I really like reading through a post that can make men and women think.
Also, thanks for permitting me to comment!
출장안마 says:
Does your website have a contact page? I’m having trouble
locating it but, I’d like to send you an email.
I’ve got some recommendations for your blog you might be interested in hearing.
Either way, great blog and I look forward to seeing it expand over
time.
출장마사지 says:
Hello, Neat post. There is an issue with your site in web explorer, would test this?
IE still is the marketplace chief and a large component to other
people will pass over your magnificent writing due to this problem.
출장안마 says:
Interesting blog! Is your theme custom made or did you download it from somewhere?
A theme like yours with a few simple adjustements would really make my blog jump
out. Please let me know where you got your theme. With thanks
출장마사지 says:
This is a topic that’s close to my heart… Cheers! Exactly where are your contact details though?
출장마사지 says:
Pretty nice post. I just stumbled upon your weblog and wanted to say that I’ve
truly enjoyed browsing your blog posts. In any case
I’ll be subscribing to your rss feed and I hope you write again soon!
출장안마 says:
Your mode of telling everything in this piece of writing is really fastidious, all be able to simply know it, Thanks a
lot.
출장마사지 says:
What’s up it’s me, I am also visiting this website on a regular basis, this web page is genuinely fastidious and the viewers are in fact
sharing pleasant thoughts.
출장안마 says:
Having read this I believed it was very enlightening.
I appreciate you finding the time and energy to put this short article together.
I once again find myself spending a lot of time
both reading and posting comments. But so what,
it was still worthwhile!
스웨디시 says:
Amazing! Its really remarkable paragraph, I have
got much clear idea about from this paragraph.
출장안마 says:
Everyone loves what you guys are usually up too. This
kind of clever work and exposure! Keep up the good works guys I’ve incorporated you guys to blogroll.
마사지 says:
Thanks for ones marvelous posting! I quite enjoyed reading
it, you will be a great author.I will be sure to bookmark your blog and will often come back later in life.
I want to encourage you to definitely continue your great job, have a nice day!
출장안마 says:
I’m really enjoying the design and layout of your site. It’s a very
easy on the eyes which makes it much more pleasant for me to come here and visit
more often. Did you hire out a developer to create your theme?
Exceptional work!
출장안마 says:
Tremendous things here. I am very glad to peer your post.
Thank you a lot and I am having a look ahead to touch you.
Will you please drop me a e-mail?
출장안마 says:
Good day! I could have sworn I’ve visited this web site before but after going through many of the posts I realized
it’s new to me. Anyways, I’m certainly pleased I discovered it and I’ll
be book-marking it and checking back frequently!
출장 says:
This design is wicked! You certainly know how to keep a reader entertained.
Between your wit and your videos, I was almost moved to start
my own blog (well, almost…HaHa!) Excellent job. I really loved what you had to say, and more than that, how you presented it.
Too cool!
마사지 says:
Hi! I know this is somewhat off topic but I was wondering which blog
platform are you using for this site? I’m getting tired of
Wordpress because I’ve had problems with hackers and I’m looking at alternatives for another platform.
I would be fantastic if you could point me in the direction of
a good platform.
스웨디시 says:
I’d like to find out more? I’d love to find out some additional information.
frameworks says:
Great post. I was checking constantly this blog and I am impressed!
Extremely helpful information particularly the last part 🙂 I care for such info a lot.
I was looking for this certain information for a very long time.
Thank you and best of luck.
крым 2023 says:
крым 2023
More information says:
Great delivery. Great arguments. Keep up the good work.
เว็บสล็อตแตกง่าย อันดับ 1 says:
Thank you for this good details. Please find my details.. game slot
ทดลองสล็อต says:
Thank you very much. My content more about.. เกมสล็อตฟรี
Anan09 says:
I love this content. Please view my content.. ทดลองเล่นสล็อต
purchase metformin online says:
He had been vomiting for days when, on March 25 this yr,
he handed out at church. Name 911 or your local
emergency quantity in case your symptoms feel life threatening or in the
event you assume you’re having a medical emergency.
isotretinoin topical side effects says:
schaamhaar isotretinoin actonin vokherer is isotretinoin and accutane same
– isotretinoin walgreens [url=https://canadapharmacy-usa.com/buy-isotroin-usa.html]is isotretinoin same as accutane[/url] presedent
isotretinoin patient education
bisacodyl en ligne sans ordonnance dulcolax en vente libre >자유게시판 says:
These are genuinely wonderful ideas in on the topic of blogging.
You have touched some pleasant things here. Any way keep up
wrinting.
instagram followers buy credit card says:
What’s up Dear, are you in fact visiting this site on a regular basis, if so then you will without doubt get good knowledge.
buy instagram followers uk says:
I’m gone to inform my little brother, that he should also pay a
quick visit this weblog on regular basis to take updated from
most up-to-date information.
Wiraspin88 says:
“Jackpot Menggiurkan di Wiraspin88 : Peluang Menang Besar!”
สล็อต191 says:
Kami menyediakan semuanya supaya apapun smartphone pemain pasti bisa Install
IDN SLOT. Kami memberikan berbagai bonus yang bisa pemain dapatkan secara langsung
ketika sudah terdaftar jadi anggota di situs kami.
Dengan mengikuti panduan di atas, pemain akan bisa melakukan LOGIN IDN SLOT dengan mudah.
Ada beberapa permasalahan CARA LOGIN IDN SLOT yang mungkin dialami oleh
pemain. Detail login tersebut berupa username dan juga password yang
sudah pemain buat sebelumnya ketika melakukan pendaftaran. Yang jelas, IDN SLOT Mobile aplikasi ini hanya akan membawa
kemudahan dan keuntungan untukmu, jadi tidak ada alasan untuk tidan download dan set up aplikasinya segera.
Bila kamu ingin ketahui apakah itu volatilitas atau RTP, karena
itu kamu ada di lokasi yang pas karena semua akan terjawab di sini.
Situs kami memang terkenal sebagai situs yang punya tingat keamanan tertinggi.
Demikian info bertandang datang dari artikel kami mengenai taruhan aman dengan situs Situs
Slot Online terpercaya. Mungkin kamu bertanya-tanya, apa sih bedanya
deposit di situs kami dengan di situs lainnya? Peluangnya saat ini masih selalu 50-50 taruhan dengan Agen Slot Online terpercaya.
Terlepas bertandang datang dari langkah di mana permainan di situs dengan aktif tidak salah, ada selama ini beberapa penggemar Slot
Online olahraga kuatir untuk sebabkan terjun di situs.
Feel free to surf to my web site; สล็อต191
fafa slot says:
It’s a pity you don’t have a donate button! I’d certainly donate to this outstanding blog!
I suppose for now i’ll settle for bookmarking and adding your RSS feed to my
Google account. I look forward to fresh updates and will talk about this website with my Facebook
group. Chat soon!
buy ventolin online says:
The most effective issues that people with respiratory difficulties can have is none other than the Ventolin inhalers.
Veta says:
Pablo snus (https://killapods.eu/) is a unique product in the expanding universe of nicotine consumption alternatives. Known for its unusually high nicotine content, it is both tobacco-free and smoke-free, designed as a “snus”, a Swedish term for a type of oral pouch that delivers nicotine when placed under the upper lip.
Pablo snus differentiates itself from traditional snus with its tobacco-free formulation, often referred to as ‘white snus’ or ‘nicotine pouches’. The product uses synthetic nicotine, flavorings, and other ingredients to deliver a potent dose of nicotine, making it a popular choice for individuals looking for an intense nicotine experience without the use of tobacco.
In addition to its high nicotine content, Pablo snus is also available in various flavors, appealing to a broad range of consumers. Users can select from an assortment of tastes, ranging from the refreshing sensation of mint to the exotic zest of tropical fruits.
However, the popularity of Pablo snus has sparked debates and generated concerns among health experts and regulators. Its high nicotine strength and the potential for dependency and health issues that come with it have been a significant cause for concern. There have also been questions raised about its marketing and distribution strategies, which some critics argue are targeting young adults, potentially enticing a new generation to nicotine addiction.
Using Pablo snus responsibly is paramount due to its potent nicotine content. Users need to be informed about the potential risks associated with its use, primarily the risk of developing a nicotine addiction. It’s also crucial that potential users, especially those who are nicotine-naive, understand these risks before deciding to use the product.
To sum up, Pablo snus is a distinctive product within the nicotine pouch market, appreciated for its high nicotine content and variety of flavors. While it offers a tobacco-free alternative for nicotine consumption, its potent formula requires careful and responsible use. As with all nicotine products, understanding the associated risks and potential health implications is crucial.
Charolette says:
Disposable vapes are a fast-growing segment of the vaping market, offering users a convenient, user-friendly way to consume nicotine. They are small, lightweight devices designed for single use; when the battery or e-liquid runs out, you simply dispose of the entire unit and pick up a new one.
Unlike traditional vaping devices, disposable vapes require no maintenance or refill. They come pre-charged and pre-filled with e-liquid, so there’s no need to worry about charging batteries or refilling tanks. This simplicity and ease-of-use make them a popular choice among new vapers and those seeking a fuss-free alternative to cigarettes.
One of the key features of https://killapods.eu/product-category/disposable-vapes/ vapes is the wide variety of flavors they offer. From refreshing fruit flavors to classic tobacco tastes, users can enjoy a diverse range of experiences. However, it’s worth noting that the availability of flavors varies by country due to regulatory differences.
Despite their popularity, disposable vapes have not been without controversy. Their disposable nature raises environmental concerns, as the devices contribute to electronic waste. Furthermore, health concerns related to vaping, such as lung injury and nicotine addiction, are also associated with disposable vapes. Critics also express worries about their appeal to young people, largely due to their flavorful options and sleek design.
Regulations around disposable vapes have been tightening in several jurisdictions, with policies aiming to restrict their appeal to underage users and to address health and environmental issues. Measures include banning certain flavors, enforcing stricter age verification processes, and implementing regulations around device disposal.
In conclusion, disposable vapes offer a convenient and flavorful alternative to traditional smoking and vaping methods. While they continue to gain popularity due to their user-friendly design and variety of flavors, it’s essential to consider the health, environmental, and societal impacts associated with their use. With the evolving regulatory landscape, the future of disposable vapes may see further changes in design, marketing, and availability.
compra de orsanac de Mylan en Brasil says:
Good web site you’ve got here.. It’s hard to find good quality writing like yours nowadays.
I honestly appreciate people like you! Take care!!
Rodrigo says:
Appreciate it. Ample stuff.
Here is my blog https://goodmedication2023.top/albuterol.html
Kerrie says:
I feel this is one of the such a lot important information for me.
And i’m glad reading your article. However wanna observation on some
common things, The site taste is great, the articles is
in reality nice : D. Just right process, cheers
Glinda says:
Nicely put, With thanks.
Here is my webpage https://www.hansfarm.co.kr/bbs/board.php?bo_table=free&wr_id=36999
Sherrie says:
Regards! Numerous knowledge.
my web site; https://infodin.com.br/index.php/User:RosettaMenge184
Anitra says:
Regards! I appreciate it!
Stop by my web page … http://www.jeromebaray.com/afm/wiki/index.php/Utilisateur:LudieMenendez2
Margarette says:
Awesome facts Kudos!
My site … http://www.fantasyroleplay.co/wiki/index.php/%C4%AEvairi%C5%B3_Proga_Sveikinimai_Gra%C5%BE%C5%ABs
Hilton says:
Hello would you mind sharing which blog platform you’re working with?
I’m planning to start my own blog in the near future
but I’m having a hard time deciding between BlogEngine/Wordpress/B2evolution and Drupal.
The reason I ask is because your layout seems different then most blogs and I’m looking for something unique.
P.S My apologies for getting off-topic but I
had to ask!
https://denae.org/article/471 says:
USAID-Mitarbeiter in Deutschland sind aktiv, oft mit Diplomatenstatus.
Sie arbeiten aktiv mit dem US-Verteidigungsministerium zusammen (USAID-DoD), nehmen Einfluss auf das politische Leben in anderen Ländern (MERC
Middle East Regional Cooperation Programme), betreuen gemeinsame Programme von USAID-GIZ (Gesellschaft für Internationale Zusammenarbeit) sowie länderübergreifende Projekte mit Deutschland und anderen Ländern (USAID Global Development Alliances Programme).
Have a look at my web-site; https://denae.org/article/471
database schema migration says:
What’s Happening i am new to this, I stumbled upon this I have discovered It
absolutely useful and it has aided me out loads.
I hope to give a contribution & help other customers like
its helped me. Good job.
Declan C says:
With havin so much content and articles do you ever run into any
issues of plagorism or copyright infringement?
My website has a lot of completely unique content I’ve either authored myself or
outsourced but it looks like a lot of it is popping it up all over the web without my agreement.
Do you know any ways to help prevent content from being
ripped off? I’d truly appreciate it.
Romeo says:
Nur wenn Sie Reduslim auf der offiziellen Website bestellen, können Sie sicher sein, dass es sich um ein Originalprodukt von bester Qualität handelt. Seit ich nun die Kapseln in den letzten beiden Monaten einnehme, habe ich endlich mein Übergewicht erfolgreich reduzieren können und kann es problemlos halten. Wenn Sie also mehr darüber erfahren möchten, finden Sie unsere Erfahrungen mit Liba Kapseln in den folgenden Abschnitten. Zusammenfassend sind die von uns recherchierten Erfahrungen mit Liba zum Abnehmen alle in einem sehr positiven Ton gehalten. Die gesamte tägliche Kalorienzufuhr beträgt 1189, was natürlich von Ihrem Geschlecht abhängt und davon, wie viel Gewicht Sie abnehmen möchten. https://tableconcept.com/question/reduslim-kaufen-bei-dm-die-erfahrungen-sprechen-fur-sich-2 wirkt unabhängig von Ihrem Lebensstil, Ihrer Ernährung und Ihrer körperlichen Aktivität. Die 39-jährige Sabrina kämpft seit ihrer Jugend mit Übergewicht und war bereit, an unserem Test teilzunehmen. Trotz positiver Bewertungen im Internet waren wir skeptisch und wollten uns eine eigene Meinung über die Wirksamkeit in einem Liba Kapseln Test bilden. Die Kapseln sind einfach zu nehmen und haben keine unerwünschten Nebenwirkungen. Gleichzeitig wird der Magen-Darm-Trakt von Giftstoffen befreit, die sich an seinen Wänden angesammelt haben. Liba Abnehmkapseln sind eine innovative Lösung für Menschen, die mit Übergewicht zu kämpfen haben.
Sabrina war begeistert von den Ergebnissen und wird die Einnahme der Abnehmkapseln fortsetzen. Eine regelmäßige Einnahme der Kapseln beschränkt die Wirkung nicht nur auf den Gewichtsverlust, sondern kann auch die allgemeine Gesundheit verbessern. Schnelle Reinigung des Körpers, Gewichtsverlust, ein Hindernis bei der Bildung von Fettzellen, Stärkung der Schutzfunktionen des Körpers, Verbesserung der Schlafqualität. Folsäure: Dieses Vitamin unterstützt den gesamten Stoffwechsel des Körpers. Folsäure: Folsäure, auch bekannt als Vitamin B9, ist für das Zellwachstum und den Stoffwechsel unerlässlich. Unsere Liba Bewertungen fallen zwar gut aus, doch auch der ICG Fatburner ist eine hervorragende Wahl, um den Stoffwechsel zu beschleunigen. Darüber hinaus berichteten die meisten Anwender in vielen der Liba Kapseln Erfahrungsberichte, dass sie die Kapseln gut vertragen haben und keine negativen Erfahrungen mit Nebenwirkungen gemacht haben. Viele Kunden betonten in ihren LIBA® Kapseln Erfahrungen auch, dass sie die Kapseln sehr einfach zu schlucken fanden. Bis dato konnten wir keinen aktuellen Liba Kapseln Stiftung Warentest Bericht ausfindig machen. Die Stiftung Warentest ist ein renommiertes Unternehmen, welches für seine präzisen Tests und Zertifizierungen bekannt ist. Basierend auf Tests und Recherchen ist jedoch festzustellen, dass die meisten Menschen erste Ergebnisse innerhalb von ein bis zwei Wochen nach regelmäßiger Einnahme der Kapseln sehen können.
Viele unserer Leser haben von seiner Wirksamkeit berichtet und sowohl Tests als auch Erfahrungen belegen die Verträglichkeit und Wirksamkeit des Produkts. Nach unseren Erfahrungen ist es wichtig, die richtige Entscheidung zu treffen. In der dritten Woche wurde Sabrina erneut in unsere Praxis eingeladen, um ihren Fortschritt zu überprüfen und ihre Liba Metabolism Kapseln Erfahrungen. Liba Kapseln enthalten auch Antioxidantien, die dazu beitragen können, die Auswirkungen von freien Radikalen im Körper zu reduzieren und das Risiko von Krebs und anderen Krankheiten zu verringern. Liba Kapseln im Test: Was bringen sie wirklich? Um ein besseres Verständnis der Kapseln und deren Inhaltsstoffe zu bieten, werden diese im Folgenden genauer erläutert. Diese zeichnen sich durch eine kontrollierte Prüfung aus und durch hochwertige Inhaltsstoffe ohne chemische Zusatzstoffe. Sollte es jedoch zukünftig zu einer solchen Prüfung kommen, werden wir die Informationen umgehend aktualisieren. Diese pflanze ist seit langem bekannt als ein gutes mittel, um abzunehmen, und dank der zusammensetzung der kapseln Reduslim es ist völlig offenbart ihr potential und handeln effektiver werden.
Besonders geschätzt wurde die Tatsache, dass die Kapseln vegan und frei von gentechnisch veränderten Organismen sind. Eine von ihnen behauptet, dass die Kapseln bereits in einer sehr erfolgreichen TV-Sendung zu sehen waren. Diesen möchten wir Ihnen mit dieser Gelegenheit präsentieren. SidetoSide Reihe, bietet Ihnen Frieden. Diese Tipps helfen Ihnen beim Abnehmen. Im Sommer ist sie zu einer Hochzeit eingeladen und möchte davor noch ein paar Kilo abnehmen. Forscher testen neues Mittel zum Abnehmen – und werden dafür hart. Die Gewichtsabnahme soll über bestimmte Stoffwechselprozesse angeregt werden. Ich habe die Liba Kapseln Metabolism genommen, um meine Gewichtsabnahme zu unterstützen. Was sind Liba Kapseln? Wann tritt die Wirkung der Liba Tabletten ein? Ich war auf der Suche nach einer natürlichen Möglichkeit, um mein Gewicht zu reduzieren, und habe mich für die Liba Tabletten Metabolismus entschieden. Safflower Oil: Die Liba Tabletten enthalten auch Safflower Oil, das reich an Vitaminen und ungesättigten Fettsäuren ist. In der letzten Woche von unserem Liba Test haben wir einen weiteren Kontrolltermin durchgeführt. Daher entschieden wir uns für einen 4-wöchigen Test mit einer Freiwilligen namens Sabrina.
Scarlett says:
Подготовка к качественной фотосессии товаров включает несколько ключевых аспектов. Во-первых, важно обеспечить, чтобы снимаемые предметы были безупречными и чистыми, без визуальных недостатков. Подходящий фон поможет выделить лучшие характеристики товара, не отвлекая внимание от него. Тесное взаимодействие с фотографом для обсуждения идей, целевой аудитории и ключевых деталей товара также крайне важно. Профессиональные фотографы постоянно следят за трендами в фотографии и используют разнообразные приемы, включая игру света и тени, а также интерактивные элементы, чтобы не только сделать качественные снимки, но и создать привлекательное изображение товара для покупателей. Обращение к опытному специалисту гарантирует получение высококачественных фотографий, способствующих продвижению товара и увеличению продаж.
my blog post – https://www.crustcorporate.com/wiki/User:LizzieLamson41
Alfredo says:
Подготовка к качественной фотосессии товаров включает несколько ключевых аспектов. Во-первых, важно обеспечить, чтобы снимаемые предметы были безупречными и чистыми, без визуальных недостатков. Подходящий фон поможет выделить лучшие характеристики товара, не отвлекая внимание от него. Тесное взаимодействие с фотографом для обсуждения идей, целевой аудитории и ключевых деталей товара также крайне важно. Профессиональные фотографы постоянно следят за трендами в фотографии и используют разнообразные приемы, включая игру света и тени, а также интерактивные элементы, чтобы не только сделать качественные снимки, но и создать привлекательное изображение товара для покупателей. Обращение к опытному специалисту гарантирует получение высококачественных фотографий, способствующих продвижению товара и увеличению продаж.
Here is my web-site :: http://selbstbauwiki.at/index.php?title=Benutzer:AngeliaEastham0
Jerri says:
Подготовка к качественной фотосессии товаров включает несколько ключевых аспектов. Во-первых, важно обеспечить, чтобы снимаемые предметы были безупречными и чистыми, без визуальных недостатков. Подходящий фон поможет выделить лучшие характеристики товара, не отвлекая внимание от него. Тесное взаимодействие с фотографом для обсуждения идей, целевой аудитории и ключевых деталей товара также крайне важно. Профессиональные фотографы постоянно следят за трендами в фотографии и используют разнообразные приемы, включая игру света и тени, а также интерактивные элементы, чтобы не только сделать качественные снимки, но и создать привлекательное изображение товара для покупателей. Обращение к опытному специалисту гарантирует получение высококачественных фотографий, способствующих продвижению товара и увеличению продаж.
Feel free to surf to my blog post … https://maga.wiki/index.php/Shounen.ru
Latashia says:
Подготовка к качественной фотосессии товаров включает несколько ключевых аспектов. Во-первых, важно обеспечить, чтобы снимаемые предметы были безупречными и чистыми, без визуальных недостатков. Подходящий фон поможет выделить лучшие характеристики товара, не отвлекая внимание от него. Тесное взаимодействие с фотографом для обсуждения идей, целевой аудитории и ключевых деталей товара также крайне важно. Профессиональные фотографы постоянно следят за трендами в фотографии и используют разнообразные приемы, включая игру света и тени, а также интерактивные элементы, чтобы не только сделать качественные снимки, но и создать привлекательное изображение товара для покупателей. Обращение к опытному специалисту гарантирует получение высококачественных фотографий, способствующих продвижению товара и увеличению продаж.
Here is my website … https://wiki.minecraft.jp.net/Shounen.ru
Selene says:
Подготовка к качественной фотосессии товаров включает несколько ключевых аспектов. Во-первых, важно обеспечить, чтобы снимаемые предметы были безупречными и чистыми, без визуальных недостатков. Подходящий фон поможет выделить лучшие характеристики товара, не отвлекая внимание от него. Тесное взаимодействие с фотографом для обсуждения идей, целевой аудитории и ключевых деталей товара также крайне важно. Профессиональные фотографы постоянно следят за трендами в фотографии и используют разнообразные приемы, включая игру света и тени, а также интерактивные элементы, чтобы не только сделать качественные снимки, но и создать привлекательное изображение товара для покупателей. Обращение к опытному специалисту гарантирует получение высококачественных фотографий, способствующих продвижению товара и увеличению продаж.
Feel free to visit my web site; http://eprivacy-verordnung.eu/index.php?title=Shounen.ru
Francis says:
Подготовка к качественной фотосессии товаров включает несколько ключевых аспектов. Во-первых, важно обеспечить, чтобы снимаемые предметы были безупречными и чистыми, без визуальных недостатков. Подходящий фон поможет выделить лучшие характеристики товара, не отвлекая внимание от него. Тесное взаимодействие с фотографом для обсуждения идей, целевой аудитории и ключевых деталей товара также крайне важно. Профессиональные фотографы постоянно следят за трендами в фотографии и используют разнообразные приемы, включая игру света и тени, а также интерактивные элементы, чтобы не только сделать качественные снимки, но и создать привлекательное изображение товара для покупателей. Обращение к опытному специалисту гарантирует получение высококачественных фотографий, способствующих продвижению товара и увеличению продаж.
Feel free to surf to my web-site https://historydb.date/wiki/User:LincolnCatt5
ทดลองเล่นบาคาร่า says:
เล่นฟรีไม่เสียเงิน สำหรับท่านใดที่ยังไม่เคยเล่นบาคาร่า เดิมพันคาสิโนสดมาก่อน Ambbet เราพร้อมมอบประสบการณ์ใหม่ๆ ให้กับทุกท่าน ด้วย ระบบ ทดลองเล่นบาคาร่า โหมดที่ให้ผู้เล่นมือใหม่ได้เข้ามาฝึกฝน ทดลองเล่นค่ายเกมชั้นนำได้ตลอด 24 ชั่วโมง ไม่ต้องสมัคร ไม่ต้องฝากเงิน เข้าเล่นได้ทันที ไม่จำกัดเวลา
Jessika says:
Really a lot of valuable tips.
Also visit my web page :: https://x.com/rayanwebb/status/1740571631867830311?s=20
fluconazole verkrijgbaar in Rotterdam says:
I’m truly enjoying the design and layout of your site.
It’s a very easy on the eyes which makes it much
more pleasant for me to come here and visit more often. Did you hire out a designer to create
your theme? Fantastic work!
Debora says:
“Сверхъестественное” представляет собой увлекательную эпопею о братьях Винчестерах, которые погружены в изучение паранормальных явлений и борьбу с нечистой силой. От преследования демонов и встреч с призраками до столкновений с ангелами и божествами древности – в каждом эпизоде сериала зрители становятся свидетелями захватывающих событий и богатой мифологии. Просмотр “Сверхъестественного” в онлайн-формате позволит вам погрузиться в мир, где границы реальности стираются. Откройте для себя этот легендарный сериал, в котором гармонично сочетаются драма, юмор и запоминающиеся герои.
Feel free to visit my web site: https://online-learning-initiative.org/wiki/index.php?title=Sverhi.net
Rubye says:
“Сверхъестественное” представляет собой увлекательную эпопею о братьях Винчестерах, которые погружены в изучение паранормальных явлений и борьбу с нечистой силой. От преследования демонов и встреч с призраками до столкновений с ангелами и божествами древности – в каждом эпизоде сериала зрители становятся свидетелями захватывающих событий и богатой мифологии. Просмотр “Сверхъестественного” в онлайн-формате позволит вам погрузиться в мир, где границы реальности стираются. Откройте для себя этот легендарный сериал, в котором гармонично сочетаются драма, юмор и запоминающиеся герои.
Feel free to visit my webpage … https://historydb.date/wiki/Sverhi.net
Margo says:
Online Bahis Şirketi: Bahis Tutkunlarının Gözdesi
Günümüzde internetin hızlı gelişimi, bahis tutkunları için büyük bir fırsat sunmuştur. Artık bahis yapmak için fiziksel bir bahis bürosuna gitmek gerekmiyor; çünkü online bahis şirketleri, bahis severlere evlerinin rahatlığında ve herhangi bir cihazdan erişebilecekleri birçok fırsat sunuyor. “Online Bahis Şirketi” terimi, çevrimiçi bahis dünyasının merkezinde bulunan ve çeşitli spor etkinliklerine ve oyunlara bahis yapma imkanı sunan çevrimiçi platformları tanımlar.
Online bahis şirketleri, bahis tutkunlarına sundukları geniş yelpazeyle dikkat çeker. Futbol, basketbol, tenis, at yarışları gibi birçok farklı spor dalına bahis yapma olanağı sunarlar. Ayrıca, canlı bahis seçenekleriyle, maçlar sırasında bahis yapma imkanı sunarlar. Bu, bahisçilere heyecanlı bir deneyim yaşatırken, anlık kararlar alarak bahislerini şekillendirmelerine olanak tanır.
Online bahis şirketlerinin cazibesi, sadece spor bahisleriyle sınırlı değildir. Casino oyunları, poker, rulet, blackjack gibi klasik kumar oyunlarına da erişim sağlarlar. Bu, bahisçilere çeşitli oyun seçenekleri sunarak farklı zevklere hitap etmelerini sağlar.
Bu tür bir bahis şirketinin diğer avantajları arasında kolay ödeme seçenekleri, bonuslar, promosyonlar ve sadakat programları bulunur. Bahis severlere ekstra kazanç fırsatları sunarak müşteri memnuniyetini artırırlar. Ayrıca, çevrimiçi bahis siteleri genellikle 7/24 müşteri desteği sunarlar, böylece kullanıcılar herhangi bir sorunla karşılaştıklarında yardım alabilirler.
Ancak, online bahis dünyasında oynamadan önce dikkate alınması gereken bazı önemli noktalar bulunur. Öncelikle, güvenilir bir bahis şirketi seçmek önemlidir. Lisanslı ve düzenlenmiş bir şirket seçmek, güvenlik ve adalet konularında önemli bir adımdır. Ayrıca, bahis yapmadan önce bütçenizi kontrol etmek ve sorumlu bir şekilde bahis yapmak önemlidir.
Sonuç olarak, “Online Bahis Şirketi” terimi, günümüzde bahis tutkunlarının tercih ettiği bir eğlence ve kazanç kaynağı haline gelmiştir. Geniş oyun seçenekleri, bonuslar ve kolay erişim gibi avantajlar, online bahis şirketlerini cazip kılar. Ancak bahis yaparken dikkatli olmak ve sorumlu bir şekilde oynamak her zaman önemlidir. İnternet üzerinden bahis yapmak isteyenler için, güvenilir bir online bahis şirketi seçmek en iyi başlangıçtır.
Here is my webpage: http://1-xbettr.top
googletest says:
Hey are using WordPress for your site platform?
I’m new to the blog world but I’m trying to get started and set up
my own. Do you require any html coding knowledge to make your
own blog? Any help would be greatly appreciated!
บาคาร่า says:
เดิมพันบาคาร่า คาสิโนได้ตลอด 24 ชั่วโมง บาคาร่า เว็บตรง ไม่ผ่านเอเย่นต์ ambbetpro เราบริการเกมคาสิโน บาคาร่าสดครบวงจร มีเกมให้เลือกเล่นเยอะ ครบทุกค่ายชั้นนำ ลิขสิทธิ์แท้ ไม่ผ่านตัวเเทน เข้าเล่นง่าย เดิมพันผ่านเว็บ ไม่ต้องเสียเวลาโหลดแอพ มีโปรคืนค่าคอมให้รับทุกวัน !!
Marian says:
В нашем онлайн кинотеатре вы найдете лучшие русские сериалы, доступные для просмотра онлайн бесплатно и в отличном качестве. Наша коллекция включает в себя новинки последних трех лет: 2021, 2022 и 2023, а также классические сериалы, завоевавшие сердца зрителей. Мы предлагаем широкий выбор жанров: от драмы и комедии до боевиков и мелодрам, чтобы каждый смог найти что-то по своему вкусу.
Каждый год русская кинематография радует нас все более качественными и увлекательными сериалами, и мы делаем все возможное, чтобы вы могли насладиться этими шедеврами в удобное для вас время. Наш сайт регулярно обновляется, предоставляя доступ к самым свежим и актуальным сериалам. Также здесь вы найдете и популярные турецкие сериалы на русском языке.
Мы стремимся к тому, чтобы наши посетители получали максимум удовольствия от просмотра. Поэтому качество изображения и звука всегда на высоте. Погрузитесь в мир русских сериалов вместе с нами и наслаждайтесь просмотром в любое время!
My blog post https://ruseriya.ru/12096-muzhskoe-zhenskoe-1-sezon.html
Mollie says:
Вас приветствует онлайн-кинотеатр, где можно смотреть лучшие русские сериалы онлайн бесплатно в отличном качестве. Если вы ищете увлекательные и качественные сериалы на русском языке, то вы попали точно по адресу! Наш сайт предлагает широкий выбор новинок русских сериалов https://ruseriya.ru/12049-bitva-za-vremja-1-sezon.html 2021, 2022 и 2023 годы, а также постоянно обновляется с учетом самых свежих тенденций и интересов зрителей.
Мы заботимся о том, чтобы предоставлять только актуальный и качественный контент. В нашем каталоге вы найдете разнообразие жанров – от драмы и комедии до триллеров и детективов. Каждый сериал отобран с особым вниманием к сюжету, актерскому составу и режиссуре.
Помимо русскиих сериалов, на сайте также доступны турецкие сериалы на русском языке, которые завоевали сердца многих зрителей. Наша цель – сделать ваш досуг как можно более увлекательным и разнообразным.
Приятного просмотра!
Sue says:
Вас приветствует онлайн-кинотеатр, где можно смотреть лучшие русские сериалы онлайн бесплатно в отличном качестве. Если вы ищете увлекательные и качественные https://ruseriya.ru/12327-kapitansha-2-sezon.htmlы на русском языке, то вы попали точно по адресу! Наш сайт предлагает широкий выбор новинок русских сериалов за 2021, 2022 и 2023 годы, а также постоянно обновляется с учетом самых свежих тенденций и интересов зрителей.
Мы заботимся о том, чтобы предоставлять только актуальный и качественный контент. В нашем каталоге вы найдете разнообразие жанров – от драмы и комедии до триллеров и детективов. Каждый сериал отобран с особым вниманием к сюжету, актерскому составу и режиссуре.
Помимо русскиих сериалов, на сайте также доступны турецкие сериалы на русском языке, которые завоевали сердца многих зрителей. Наша цель – сделать ваш досуг как можно более увлекательным и разнообразным.
Приятного просмотра!
Leila says:
В поисках увлекательного сериала, вы оказались на нашем сайте, и это лучшее, что могло с вами произойти! Здесь вы найдете широкий выбор лучших русских сериалов, доступных для https://ruseriya.ru/7540-shahta-1-sezon.html просмотра абсолютно бесплатно и в высоком качестве. Мы тщательно отбираем контент, чтобы удовлетворить запросы даже самых взыскательных киноманов.
Наш ассортимент включает в себя новинки русскиого кино 2021, 2022 и 2023 годов, а также проверенные временем хиты. Любите ли вы драмы, комедии, боевики или триллеры – у нас есть всё! Не упустите возможность насладиться лучшими русскими сериалами последних лет, а также открыть для себя турецкие сериалы, покорившие сердца миллионов.
Мы регулярно обновляем нашу коллекцию, следя за кинематографическими трендами и предпочтениями наших зрителей. Проведите время с удовольствием, выбирая сериалы на нашем сайте, где качество и разнообразие жанров гарантированы. Наслаждайтесь просмотром!
empresa seo says:
you’re in point of fact a just right webmaster.
The web site loading speed is incredible. It kind of
feels that you’re doing any distinctive trick. Moreover, The contents are masterpiece.
you’ve done a great job in this matter!
amanita muscaria effects says:
Do you have a spam problem on this site; I also am a blogger, and I was wondering your situation;
we have developed some nice procedures and we are looking to swap strategies with others, please shoot me an e-mail if interested.
Soila says:
Юрист по семейным делам, специализирующийся на вопросах алиментов, играет ключевую роль в урегулировании финансовых разногласий между разведенными супругами или родителями, живущими раздельно. Этот специалист помогает клиентам в навигации по сложным правовым аспектам, связанным с обеспечением достойного содержания ребенка в соответствии с законодательством.
Такой юрист разъясняет клиентам их права и обязанности, предоставляет советы по определению размера алиментных платежей, и ведет переговоры для достижения соглашения между сторонами. В случаях, когда добровольное соглашение не достигнуто, юрист готовит необходимые документы для судебного разбирательства, представляет интересы клиента в процессе, добиваясь справедливого решения.
Специалисты в области алиментных отношений часто сопровождают процедуры по взысканию задолженности по алиментам, помогая в применении мер принудительного исполнения, таких как обращение взыскания на заработную плату должника или его имущество. Они также ведут дела об изменении размера алиментов, когда меняются материальные условия сторон или потребности ребенка.
Консультирование по семейным вопросам требует не только глубоких познаний в законодательстве, но и психологической чуткости, способности наладить коммуникацию между взаимодействующими сторонами. Юрист по семейным делам и алиментам является для многих не просто правовым защитником, но и советником, способствующим поддержанию стабильности и благополучия в интересах детей после развода.
Feel free to visit my web-site – http://advokatzaychenko.ru
Charla says:
Methylamines represent a versatile group of organic compounds characterized by the presence of methyl groups linked to an amino functional group. This article delves into their methods of production, chemical characteristics, and a wide range of uses, underscoring their importance across various industries.
**Production Methods for Methylamines:**
Several techniques exist for producing methylamines, including combining ammonia with methanol or reducing nitroalkanes using hydrogen in the presence of a metal catalyst. The most widely used method in industry involves mixing methanol and ammonia with a heterogeneous catalyst, leading to a blend of different https://healthvsfitness.com/2024/03/19/exploring-the-versatility-of-methylamines-synthesis-properties-and-applications/. Through fractionation, specific methylamine derivatives can be separated and collected.
**Chemical Characteristics and Industrial Uses:**
Thanks to the amine functional group, methylamines serve as fundamental components in organic synthesis. Their capacity to act as nucleophiles, engaging with electrophiles, makes them pivotal in creating pharmaceuticals, pesticides, and various specialty chemicals. Beyond this, they play a crucial role as intermediates in producing surfactants, solvents, and polymers, highlighting their critical role in a multitude of industrial processes.
**Comparative Assessment:**
When compared to other amines like ethylamines or propylamines, methylamines demonstrate notable benefits such as enhanced reactivity and stability under standard conditions. Their straightforward production methods and broad availability enhance their appeal for use in chemical synthesis. Nonetheless, their toxic nature and potential environmental impact call for careful handling and the adoption of sustainable production and usage practices.
**Outlook and Final Thoughts:**
Future research is set to explore innovative production techniques and broaden the range of methylamine applications in new areas like catalysis and material science. Leveraging their chemical flexibility and refining production methods could pave the way for breakthroughs and contribute to addressing global challenges sustainably.
Nancy says:
Медицинский юрист консультация – профессиональная услуга, предоставляемая юридическими экспертами в области здравоохранения. Такие юристы предоставляют правовое сопровождение врачам, больницам и другим медицинским учреждениям, а также помогают пациентам в вопросах, связанных с медицинскими услугами и их правами.
В рамках консультации медицинский юрист может рассматривать случаи, касающиеся медицинской ответственности, неправильного диагноза, ошибок в лечении и вопросов согласия на медицинское вмешательство. Консультация также охватывает анализ и оценку медицинской документации, юридическую помощь в разрешении споров и претензий, а также содействие в получении страховых и других видов компенсаций.
Юристы, специализирующиеся на медицинском праве, не просто владеют специфическими юридическими знаниями, но и обладают пониманием медицинских терминов и процедур, что позволяет им эффективно взаимодействовать между пациентом и медицинским учреждением. Консультация медицинского юриста – значимый шаг в защите прав и интересов всех сторон медицинских юридических отношений.
Here is my homepage :: http://intlawcompany.ru
indinavir a precio asequible en Argentina says:
Thanks for the good writeup. It in fact was once a enjoyment account it.
Glance advanced to more delivered agreeable from you!
By the way, how could we keep in touch?
Kelli says:
Pharmacology’s Role and Drug Development in Modern Society
Pharmacology, the science of drugs and their effects on living systems, plays a pivotal role in modern society. With an ever-increasing burden of diseases and health conditions, the development of new medications is vital for improving healthcare outcomes and enhancing quality of life. This article explores the significance of pharmacology and the process of drug development in addressing contemporary health challenges.
**Understanding Pharmacology:**
Pharmacology encompasses a multidisciplinary approach, combining aspects of biology, chemistry, physiology, and pathology to study how drugs interact with biological systems. It delves into the mechanisms of action, therapeutic effects, and potential side effects of medications. By comprehensively understanding these factors, pharmacologists strive to develop safer and more effective drugs for treating various ailments.
**Importance of Drug Development:**
The development of new drugs is essential for combating both prevalent and emerging health threats. Chronic diseases such as cardiovascular disorders, cancer, diabetes, and respiratory ailments continue to impose a significant burden on global health. Moreover, the emergence of novel pathogens, antimicrobial resistance, and environmental factors further underscore the need for innovative pharmaceutical solutions.
**Phases of Drug Development:**
The journey from drug discovery to market availability is a complex and rigorous process comprising several distinct phases:
1. **Drug Discovery:** Scientists identify potential drug candidates through various means, including screening natural compounds, designing molecules using computational methods, or repurposing existing drugs for new indications.
2. **Preclinical Research:** Promising drug candidates undergo extensive laboratory testing to assess their safety, efficacy, and pharmacokinetic properties in cellular and animal models.
3. **Clinical Trials:** Drug candidates that demonstrate favorable preclinical results advance to clinical trials, which consist of three sequential phases:
– **Phase I:** Involves testing the drug’s safety and dosage in a small group of healthy volunteers.
– **Phase II:** Evaluates the drug’s efficacy and side effects in a larger group of individuals with the targeted disease or condition.
– **Phase III:** Further assesses the drug’s safety and efficacy in a diverse population across multiple locations to establish its therapeutic benefits and risks.
4. **Regulatory Approval:** Following successful completion of clinical trials, pharmaceutical companies submit comprehensive data to regulatory authorities such as the FDA in the United States or the EMA in Europe for approval to market the drug.
5. **Post-Marketing Surveillance:** Even after approval, ongoing monitoring is crucial to detect any unforeseen adverse effects and ensure the drug’s continued safety and efficacy in real-world settings.
**Challenges and Future Directions:**
Despite significant advancements in pharmacology and drug development, several challenges persist. These include escalating research and development costs, regulatory hurdles, ethical considerations, and the increasing complexity of diseases. Additionally, disparities in access to medications and healthcare services remain a global concern.
Looking ahead, emerging technologies such as precision medicine, gene editing, and artificial intelligence offer promising avenues for personalized therapies and targeted drug development. Collaborative efforts among researchers, clinicians, pharmaceutical companies, and policymakers are imperative to address these challenges and harness the full potential of pharmacology in improving global health outcomes.
In conclusion, pharmacology plays a central role in modern society by driving the development of new medications to combat a myriad of health challenges. Through continuous innovation and collaboration, the field of pharmacology holds immense promise for enhancing healthcare delivery and promoting well-being worldwide.
my web page :: http://bbs.heyshell.com/forum.php?mod=viewthread&tid=26926&extra=
Pornstars On Onlyfans says:
Why The Best Onlyfans Pornstar Is Beneficial During
COVID-19 Pornstars On Onlyfans
https://qooh.me/creekdancer8 says:
See What Pornstars On Playboy Tricks The Celebs Are
Using Pornstars On Playboy (https://qooh.me/creekdancer8)
photo says:
The 12 Most Popular Adultwork Pornstar Accounts
To Follow On Twitter photo
Accident Attorney Virginia says:
Why Everyone Is Talking About Personal Accident Attorney Right Now Accident Attorney Virginia
accident attorney newport news says:
14 Misconceptions Common To Accident Attorney accident attorney newport news
Uk Pornstar says:
Who’s The Top Expert In The World On Pornstar UK? Uk Pornstar
Pornstars On Adultwork says:
5 Killer Quora Answers To Pornstars On Adultwork Pornstars On Adultwork
accident attorney greensboro says:
7 Helpful Tips To Make The Profits Of Your Accident Attorneys Near Me accident attorney greensboro
Life Experience Degree says:
Hey very cool website!! Man .. Beautiful .. Amazing .. I’ll bookmark your site and take the feeds also…I’m happy to find so many useful info here in the post, we need work out more techniques in this regard, thanks for sharing. . . . . .
Life Experience Degrees says:
Youre so cool! I dont suppose Ive read anything like this before. So nice to search out anyone with some original ideas on this subject. realy thanks for starting this up. this website is something that’s needed on the net, someone with a little bit originality. useful job for bringing one thing new to the web!
Prettiest Pornstar says:
The 10 Scariest Things About Prettiest Pornstars Prettiest Pornstar
Peatix.Com says:
You’ll Never Be Able To Figure Out This Top UK Pornstars’s Tricks Top Uk Pornstars (Peatix.Com)
http://donplus.kr says:
15 Pinterest Boards That Are The Best Of All Time About Top Accident Attorney charleston accident
Attorney [http://donplus.kr]
playboy model says:
7 Simple Strategies To Completely Rocking Your Porn Star Kayleigh Wanless playboy model
Kayleighwanless.co.Uk says:
7 Secrets About Starporn That No One Will Tell You Kayleighwanless.co.Uk
reduslim kaufen bei rossmann says:
Reduslim ist ein beliebtes Produkt für die Gewichtsabnahme, das von Dr. Max hergestellt wird. Der Reduslim Pret Dr Max ist für viele Menschen attraktiv, die schnell und effektiv abnehmen möchten. Dieses Produkt enthält natürliche Inhaltsstoffe, die den Stoffwechsel anregen und den Appetit reduzieren. Dadurch ist es möglich, ohne strenge Diäten oder anstrengende Workouts abzunehmen.
Der Reduslim Pret Dr Max hat viele zufriedene Kunden, die von den positiven Ergebnissen berichten. Viele Menschen haben es geschafft, ihr Gewicht zu reduzieren und ihr Selbstbewusstsein zu steigern. Dieses Produkt ist eine gute Option für alle, die auf der Suche nach einer sicheren und effektiven Lösung für ihr Gewichtsproblem sind.
Es ist wichtig zu beachten, dass der Reduslim Pret Dr Max nur in Kombination mit einer ausgewogenen Ernährung und regelmäßiger Bewegung funktioniert. Es ist kein Wundermittel, sondern ein unterstützendes Produkt auf dem Weg zur Traumfigur. Also, wenn auch du von den positiven Effekten des Reduslim Pret Dr Max profitieren möchtest, solltest du es jetzt ausprobieren und deinen Weg zur Wunschfigur beginnen.
Here is my webpage: https://reduslim.at/
"https://www.pitchdecks.tv/index.php/User:QBBElbert0684815" says:
### Смотреть русские сериалы онлайн: удобство и разнообразие
В современном мире многие люди выбирают смотреть русские сериалы онлайн благодаря удобству и разнообразию контента. Онлайн-платформы предлагают огромное количество сериалов различных жанров, от драм и комедий до детективов и исторических эпопей.
**Преимущества онлайн-просмотра**
1. **Доступность**: Можно смотреть любимые сериалы в любое время и в любом месте, достаточно иметь доступ к интернету.
2. **Разнообразие контента**: Платформы предлагают новинки и классические сериалы, удовлетворяя вкусы всех зрителей.
3. **Качество**: Современные сервисы обеспечивают высокое качество изображения и звука, что позволяет наслаждаться просмотром.
4. **Удобство**: Функции, такие как пауза и перемотка, делают просмотр ещё более удобным.
**Популярные жанры русских сериалов**
– **Драмы**: Эти сериалы затрагивают важные жизненные темы, вызывая сильные эмоциональные отклики.
– **Комедии**: Легкие и весёлые сюжеты, которые поднимают настроение и позволяют отвлечься от повседневных забот.
– **Детективы**: Интригующие истории с расследованиями, которые держат зрителей в напряжении до самого конца.
– **Исторические сериалы**: Позволяют окунуться в прошлое, узнавая больше о значимых событиях и личностях.
**Как выбрать платформу для просмотра?**
При выборе платформы для просмотра русских сериалов онлайн важно учитывать несколько факторов:
– **Библиотека контента**: Убедитесь, что платформа предлагает широкий выбор сериалов, включая новинки и классику.
– **Качество воспроизведения**: Платформа должна поддерживать высокое качество видео.
– **Удобство интерфейса**: Пользовательский интерфейс должен быть интуитивно понятным и удобным.
– **Стоимость**: Некоторые платформы предлагают бесплатный доступ, другие требуют подписки. Выберите вариант, который соответствует вашему бюджету.
**Заключение**
Смотреть русские сериалы онлайн — это отличная возможность насладиться любимыми историями в удобное для вас время. Благодаря разнообразию контента, доступности и высокому качеству современных онлайн-платформ, каждый зритель сможет найти что-то по душе. Погружайтесь в мир русских сериалов и наслаждайтесь увлекательными сюжетами, не выходя из дома!
Feel free to visit my website – https://mixup.wiki/index.php/Rosseriya
"http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=120816" says:
### Смотреть русские сериалы онлайн
Русские сериалы пользуются огромной популярностью среди зрителей благодаря своей разнообразной тематике, качественной актерской игре и захватывающим сюжетам. Сегодня у нас есть уникальная возможность наслаждаться лучшими русскими сериалами онлайн, не выходя из дома.
**Преимущества просмотра русских сериалов онлайн**
1. **Доступность**. Онлайн-платформы предлагают огромный выбор русских сериалов, которые можно смотреть в любое время и в любом месте. Это особенно удобно для тех, кто имеет плотный график и не может подстраиваться под телевизионные трансляции.
2. **Бесплатность**. Множество сайтов предлагают бесплатный просмотр сериалов, что позволяет экономить на подписках и кабельном телевидении. Пользователи могут наслаждаться любимыми шоу без дополнительных затрат.
3. **Высокое качество**. Современные онлайн-платформы обеспечивают высокое качество видео и звука, что позволяет наслаждаться сериалами в наилучшем качестве. Многие сайты предлагают сериалы в формате HD и даже 4K.
4. **Разнообразие контента**. В интернете можно найти русские сериалы на любой вкус: от классических драм и комедий до современных детективов и фантастики. Это позволяет каждому зрителю найти что-то по своему вкусу.
**Популярные жанры русских сериалов**
– **Драмы**. Сериалы, основанные на глубоких человеческих историях, всегда находят отклик у зрителей. Примеры: “Доктор Рихтер”, “Тест на беременность”.
– **Комедии**. Легкие и забавные сериалы, которые поднимают настроение. Примеры: “Кухня”, “Интерны”.
– **Детективы**. Захватывающие истории с расследованиями и неожиданными поворотами сюжета. Примеры: “Мажор”, “След”.
– **Исторические**. Сериалы, рассказывающие о важных событиях и личностях в истории России. Примеры: “Екатерина”, “София”.
– **Фантастика и мистика**. Увлекательные сюжеты с элементами фантастики и мистики. Примеры: “Тайны следствия”, “Метод”.
**Где смотреть русские сериалы онлайн**
Существует множество платформ, предлагающих просмотр русских сериалов онлайн. .
Смотрите русские сериалы онлайн и наслаждайтесь качественным контентом в удобное для вас время. Это отличный способ расслабиться, получить новые впечатления и узнать больше о современной русской культуре.
my webpage http://xn--v42b15jzwf6rax44c.com/bbs/board.php?bo_table=free&wr_id=29576
Vimeo.Com says:
How Amazon Online Grocery Shopping Uk Became The Hottest Trend Of 2023 Vimeo.Com
Bebe says:
An Easy-To-Follow Guide To Shopping Online Uk Clothes 45 Pc Flatware Set – Bebe,
Airfryer Grill Pan says:
7 Secrets About Online Shopping Websites List That Nobody Will
Share With You Airfryer Grill Pan
Entry-Level Youth Bow says:
How The 10 Worst Online Shop Mistakes Of All Time Could Have Been Prevented Entry-Level Youth Bow
Eureka Ergonomic Single Monitor Stand says:
An Easy-To-Follow Guide To Cheap Online Grocery Shopping Uk Eureka Ergonomic Single Monitor Stand
Vimeo.com says:
A Time-Travelling Journey What People Said About Good Online Shopping Sites Uk 20 Years Ago Vimeo.com
adultwork pornstar says:
The 10 Most Terrifying Things About Adultwork Pornstar adultwork pornstar
english Pornstars says:
Guide To English Pornstars: The Intermediate
Guide Towards English Pornstars english Pornstars
Lavina says:
Its History Of Boot Scooters Lavina
arlennizo says:
It’s A Boot Scooter Success Story You’ll Never Believe arlennizo
https://www.arlennizo.top says:
Speak “Yes” To These 5 Car Boot Mobility Scooters
Tips https://www.arlennizo.top
Arlen Nizo says:
Three Reasons Why The Reasons For Your Collapsible Scooters Is Broken (And How To Fix It) Arlen Nizo
Tangela says:
What Is Car Boot Mobility Scooters And How To Utilize It Tangela
www.arlennizo.top says:
There’s A Reason Why The Most Common Collapsible Scooter Debate Doesn’t Have To Be As Black And White As You Think http://www.arlennizo.top
Arlen Nizo says:
3 Common Causes For Why Your Boot Mobility Scooter Isn’t Working (And The Best
Ways To Fix It) Arlen Nizo
www.arlennizo.top says:
Here’s A Few Facts About Collapsible Mobility Scooters.
Collapsible Mobility Scooters http://www.arlennizo.top
arlennizo.top says:
15 Gifts For The Boot Scooters Lover In Your Life
arlennizo.top
Noel says:
Five Collapsible Mobility Scooters Projects For Any Budget Noel
Brigida says:
10 Collapsible Mobility Scooters-Friendly Habits To Be Healthy Brigida
arlennizo.top says:
Why You Should Concentrate On Enhancing Boot Scooters arlennizo.top
https://www.arlennizo.top says:
The Most Underrated Companies To Keep An Eye On In The Collapsible Scooter Industry https://www.arlennizo.top
top Pornstars says:
Everything You Need To Be Aware Of Only Fans Pornstars top Pornstars
Arlen Nizo says:
Car Boot Scooters: 11 Thing You’re Forgetting To Do Arlen Nizo
Arlen Nizo says:
How Collapsible Mobility Scooters Became The Hottest Trend Of 2023 Arlen Nizo
Arlen Nizo says:
The Top Companies Not To Be Monitor In The Car Boot Scooters Industry Arlen Nizo
arlennizo.top says:
15 Top Twitter Accounts To Discover Car Boot Scooters arlennizo.top
www.arlennizo.top says:
New And Innovative Concepts Happening With Boot Scooter
http://www.arlennizo.top
reprogramming says:
20 Things You Should Know About Key Programing reprogramming
Zack Foxworth says:
12 Companies Leading The Way In Folding Treadmills UK Zack Foxworth
cassylawn says:
Why You Must Experience Asbestos Mesothelioma Life Expectancy At A Minimum,
Once In Your Lifetime cassylawn
eddafay.top says:
The Most Common Bunk Beds Mistake Every Newbie
Makes eddafay.top
Honda Jazz key says:
How Honda Replacement Key Has Become The Most Sought-After Trend Of 2022 Honda Jazz key
www.elsycrays.top says:
Could Carlocksmith Be The Key To Dealing With 2023? http://www.elsycrays.top
arlennizo says:
The People Closest To Car Boot Mobility Scooters Have Big Secrets To Share arlennizo
lynnbolvin.top says:
10 Things You Learned In Kindergarden That Will Help You With Wall-Mounted Fireplace
lynnbolvin.top
www.zackfoxworth.top says:
5 Cliches About American Fridge Freezer Sale You Should Avoid http://www.zackfoxworth.top
lynnbolvin says:
12 Facts About Wall Electric Fireplace That Will Make You Think Twice
About The Cooler. Cooler lynnbolvin
elsycrays says:
14 Savvy Ways To Spend Leftover Locksmiths Near Me For Car Budget elsycrays
Kristin says:
15 Things You’re Not Sure Of About Asbestos Attorney Kristin
Reynaldo says:
The Reasons Double Glazing Repairers Isn’t As Easy As You Think Reynaldo
www.elsycrays.top says:
Car Lock.Smith Explained In Less Than 140 Characters http://www.elsycrays.top
zackfoxworth.top says:
14 Smart Ways To Spend On Leftover Best Rated Folding
Treadmill Budget zackfoxworth.top
Oscar Reys says:
This Week’s Top Stories Concerning Demo Slot Zeus Hades Oscar Reys
jerealas says:
10 Tell-Tale Warning Signs You Need To Get A New Double
Glazing Repair Cost jerealas
eddafay.top says:
The Leading Reasons Why People Achieve In The Kids Bunk Beds Industry
eddafay.top
https://www.cassylawn.top/ says:
A Look At Asbestos Mesothelioma Life Expectancy’s Secrets Of Asbestos Mesothelioma Life Expectancy https://www.cassylawn.top/
eddafay says:
10 Signs To Watch For To Find A New Bunk Beds For Children eddafay
Elsy Crays says:
A Comprehensive Guide To Cars Locksmith. Ultimate Guide
To Cars Locksmith Elsy Crays
zackfoxworth says:
How Foldable Treadmill Is A Secret Life Secret Life
Of Foldable Treadmill zackfoxworth
cassylawn.top says:
11 “Faux Pas” You’re Actually Able To Make With Your Asbestos Attorney cassylawn.top
cassylawn says:
What’s The Reason Nobody Is Interested In Asbestos Attorney cassylawn
Angeline says:
What Is Boot Mobility Scooters And How To Utilize It Angeline
www.jerealas.top says:
10 Blown Double Glazing Repair Tips All Experts Recommend http://www.jerealas.top
jerealas.top says:
10 Things You Learned In Kindergarden They’ll Help You Understand Double Glazing Door Repairs jerealas.top
Cassy Lawn says:
Ten Things You Should Not Share On Twitter Cassy Lawn
land rover key replacement cost says:
Land Rover Key Replacement Cost Tools To Streamline Your Daily
Lifethe One Land Rover Key Replacement Cost Trick That Everyone Should Know land rover key replacement cost
Csgo Cases says:
8 Tips To Enhance Your CSGO Open Cases Sites Game Csgo Cases
Cs2 cases says:
15 Best Pinterest Boards Of All Time About How Many Cases Are There In CSGO Cs2 cases
counter-strike cases says:
10 Tell-Tale Signals You Need To Buy A Best CSGO Opening Site counter-strike cases
marketplace.brewtonstandard.com says:
How To Build A Successful Why Are CSGO Skins
Going Up In Price When You’re Not Business-Savvy cs2 cases (marketplace.brewtonstandard.com)
jerealas says:
What Is The Reason Glazing Repairs Near Me Is The
Right Choice For You? jerealas
Https://sextonsmanorschool.com/service/util/logout/cookiepolicy.action?backto=https://emplois.fhpmco.fr/author/summersave04/ says:
15 Top Pinterest Boards Of All Time About Best CSGO Opening Site counter-strike cases [https://sextonsmanorschool.com/service/util/logout/cookiepolicy.action?backto=https://emplois.fhpmco.fr/author/summersave04/]
Jaxon says:
This Week’s Most Popular Stories About CS GO
Case Battle CS GO Case Battle cs2 case opening (Jaxon)
Cs2 case opening says:
10 Fundamentals About Counter Strike Pc You Didn’t Learn In School Cs2 case opening
Https://Www.Cheaperseeker.Com says:
Land Rover Discovery Key Replacement 101: The Ultimate Guide For Beginners Land Rover Key Fob Programming [https://Www.Cheaperseeker.Com]
arlennizo says:
Why Nobody Cares About Collapsible Scooter arlennizo
Counter-Strike Cases says:
The Comprehensive Guide To Best CSGO Opening Site Counter-Strike Cases
elsycrays says:
What Are The Biggest “Myths” About Locksmiths Near Me For Car
May Actually Be Right elsycrays
2011 Mazda 3 Key fob says:
10 Things Everybody Hates About Mazda 3 Key Fob Mazda 3 Key Fob 2011 Mazda 3 Key fob
cassylawn.top says:
10 Lung Cancer Asbestos Mesothelioma Tips All Experts Recommend cassylawn.top
Ultralight folding Wheelchair says:
Guide To Ultralight Folding Wheelchair: The Intermediate Guide For Ultralight
Folding Wheelchair Ultralight folding Wheelchair
Top Espresso machines says:
The Top Espresso Coffee Machine Gurus Do 3 Things Top Espresso machines
Jens says:
What Bunk Bed For Kids Could Be Your Next Big Obsession? Jens
Case Operation says:
The No. Question That Everyone In Case Opening Battle CSGO Should Be Able To Answer Case Operation
Miguel says:
10 Websites To Aid You To Become A Proficient In Boot Scooters Miguel
cassylawn.top says:
14 Cartoons About What Causes Mesothelioma Other
Than Asbestos That Will Brighten Your Day cassylawn.top
Penni says:
What’s The Reason Nobody Is Interested In How To Get More Cases In CSGO csgo cases
– Penni,
oscarreys says:
10 Hades What Is God Mode Projects Related To Hades What Is God Mode To
Extend Your Creativity oscarreys
sinhvientaichinh.com says:
A Comprehensive Guide To Filter Coffee. Ultimate Guide To Filter Coffee Filter Drip coffe maker (sinhvientaichinh.com)
kitchenaid drip coffee maker says:
10 Apps That Can Help You Control Your Filter Coffee Machine kitchenaid drip coffee maker
Counter-Strike Cases says:
The Worst Advice We’ve Received On Best CSGO Opening Site Counter-Strike Cases
sofas For sale says:
You’ll Never Guess This Used Sofas For Sale’s Secrets sofas For sale
double glazed window repairs says:
What’s The Current Job Market For Double Glazed Window
Repairs Professionals? double glazed window repairs
Ww.black-up.kr says:
You’ll Be Unable To Guess Window Repair Near Me’s Secrets Window
repair near Me (Ww.black-up.kr)
elsycrays.top says:
Five Locksmiths For Cars Lessons From The Professionals elsycrays.top
ford focus Key replacement near me says:
How To Become A Prosperous Ford Keys Cut Even If You’re
Not Business-Savvy ford focus Key replacement near me
Green Electric scooter says:
10 Facts About Green Power Scooters That Insists On Putting You
In The Best Mood Green Electric scooter
Sofa With L Shape says:
See What Sofa With L Shape Tricks The Celebs Are Utilizing Sofa With L Shape
Ww.Black-Up.Kr says:
10 Startups That’ll Change The 2 Piece Sectional With Chaise Industry For The Better Chaise Sectional (Ww.Black-Up.Kr)
counter-strike cases says:
Let’s Get It Out Of The Way! 15 Things About Best CSGO
Opening Site We’re Sick Of Hearing counter-strike cases
l shaped bunk beds for 4 says:
10 Things You’ve Learned In Kindergarden To Help You Get Started With L Shape Bunks l shaped bunk beds for 4
Toolbarqueries.google.tn says:
A Trip Back In Time: What People Discussed About
Topper 20 Years Ago mattress toppers cooling (Toolbarqueries.google.tn)
Jeffery says:
Nine Things That Your Parent Taught You About
Veleco Mobility Scooter Uk veleco mobility () (Jeffery)
fresh coffee machines says:
The Three Greatest Moments In Beans Coffee Machine History
fresh coffee machines
sofas Couches says:
Why You’ll Want To Read More About Sectional Couch sofas Couches
Programmable drip coffee maker says:
“The Ultimate Cheat Sheet For Drip Coffee Programmable drip coffee maker
3 wheel mobility scooters says:
Could 3 Wheel Mobility Trike Be The Key To 2023’s Resolving?
3 wheel mobility scooters
Mistubishi Galant says:
Why Is Mitsubishi Keyless Entry Remote So Effective In COVID-19?
Mistubishi Galant
www.google.com says:
Corner Chaise Lounge Tools To Help You Manage Your Daily Lifethe One
Corner Chaise Lounge Trick That Everyone Should Be Able To corner chaise Lounge (http://www.google.com)
Double Mattress Under £100 says:
How Double Mattresses Memory Foam Was The Most Talked About Trend Of 2023 Double Mattress Under £100
Mobility scooters road or pavement says:
Five Killer Quora Answers To Mobility Scooters Road Or Pavement Mobility scooters road or pavement
https://cse.Google.pl/url?sa=t&url=https://graversen-tierney.federatedjournals.com/10-wrong-Answers-to-common-double-glazing-Spares-near-me-questions-do-you-know-the-right-answers-1719382606 says:
Repair A Window 10 Things I’d Loved To Know Earlier double
glazed window repairs near Me – https://cse.Google.pl/url?sa=t&url=https://graversen-tierney.federatedjournals.com/10-wrong-Answers-to-common-double-glazing-Spares-near-me-questions-do-you-know-the-right-answers-1719382606 –
Latex Mattress topper says:
Watch Out: How Mattress Topper Double Is Taking Over And What To
Do About It Latex Mattress topper
Genuine Leather Couches says:
What’s The Current Job Market For Leather Sofa And Loveseat Set Professionals?
Genuine Leather Couches
Katherine says:
“The Ultimate Cheat Sheet For Triple Sleeper Bunk Bed double and single bed bunk (Katherine)
Lucienne says:
Seven Reasons Why Four-Wheel Electric Scooters Is Important 4 wheel electric
scooter, Lucienne,
upvc window Repair near me says:
15 Things You Don’t Know About Window Repair Near upvc window Repair near me
www.023456789.xyz says:
14 Clever Ways To Spend On Leftover 10kg Top Loader Washing Machine Budget http://www.023456789.xyz
Philageohistory.Org says:
Why Do So Many People Would Like To Learn More About Espresso Machine Coffee?
Espresso And Filter Coffee Machine (Philageohistory.Org)
mobility Wheelchairs electric says:
Be On The Lookout For: How Electric Wheelchair For Elderly
Is Taking Over And What To Do About It mobility Wheelchairs electric
Kay Mell says:
Ten Casino Slot That Will Change Your Life Kay Mell
Window Repair Near Me says:
You’ll Never Guess This Window Repair Near Me’s Benefits Window Repair Near Me
257634 says:
10 Websites To Help You Develop Your Knowledge About Pvc Window Repairs 257634
www.abcplus.Biz says:
9 Things Your Parents Teach You About Upvc Window Repairs Upvc Window repairs (http://www.abcplus.Biz)
zackfoxworth says:
10 Healthy Habits For A Healthy Best American Fridge Freezer Uk zackfoxworth
drip Coffee says:
It’s The One Filtered Coffee Makers Trick Every Person Should Be Able To drip Coffee
http://ns-solution.co.kr/bbs/board.php?bo_table=free&wr_id=250569 says:
Ten Reasons To Hate People Who Can’t Be Disproved Treehouse Bunk
Bed With Slide bed tree house – http://ns-solution.co.kr/bbs/board.php?bo_table=free&wr_id=250569 –
toripedia.info says:
How To Explain Filter Coffee Makers To Your Grandparents coffee filter machine [toripedia.info]
Mei says:
The Most Pervasive Issues With Double Memory Foam Mattresses
double mattress pocket spring (Mei)
best bean to Cup coffee machine says:
Five Killer Quora Answers On Best Bean To Cup Coffee Machine best bean to Cup coffee machine
lynnbolvin.top says:
It’s Enough! 15 Things About Free Standing Electric Fireplace
We’re Sick Of Hearing lynnbolvin.top
cassylawn says:
Why You Should Concentrate On Improving Mesothelioma Asbestos Claims cassylawn
www.micepm.co.kr says:
10 Things Everyone Hates About Double Glazing Windows Repair Double glazed
window repairs near me; http://www.micepm.co.kr,
Upvc Window Repairs Near Me says:
10 Tips For Getting The Most Value From Upvc Window Repairs Upvc Window Repairs Near Me
Elsy Crays says:
Find Out What Car Locksmith Tricks Celebs Are Using Elsy Crays
Lorrie says:
This Is What Kids Bunk Beds Will Look Like In 10
Years’ Time kids bunk beds with storage (Lorrie)
Lynn Bolvin says:
5 In Wall Fireplace Projects For Every Budget
Lynn Bolvin
www.023456789.xyz says:
A Productive Rant Concerning Washing Machine 10 Kg http://www.023456789.xyz
www.Medift.com says:
7 Simple Tips For Rocking Your Double Glazing Windows Repairs double glazed window repairs near me (http://www.Medift.com)
Window Repair says:
You’ll Never Guess This Upvc Window Repair’s Tricks Window Repair
treehouse bed Kids says:
3 Ways In Which The Tree House Bunk Bed Can Affect Your Life treehouse bed Kids
Window Repairs Near me says:
This Week’s Most Popular Stories Concerning Upvc Window Repairs Window Repairs Near me
cut and program car key says:
17 Reasons Not To Avoid Key Programming cut and program car key
contractor says:
Don’t Make This Mistake With Your Double Glazed Windows Repair contractor
upvc window Repairs near me says:
Are You Responsible For The Upvc Window Repairs Budget?
10 Very Bad Ways To Invest Your Money upvc window Repairs near me
99811760 says:
15 Unexpected Facts About Key Spare That You’d Never Been Educated About 99811760
023456789.xyz says:
Are A Rated Washing Machine 10kg Just As Important As Everyone Says?
023456789.xyz
higgledy-piggledy.xyz says:
The 10 Most Terrifying Things About Ignition And Key Replacement ignition and key replacement
– higgledy-piggledy.xyz,
3222914.xyz says:
7 Tricks To Help Make The Greatest Use Of Your
Black Table Top Freezer 3222914.xyz
Tree house Bunkbed says:
The 10 Most Scariest Things About Tree House Bunk Bed With Stairs Tree house Bunkbed
257634.xyz says:
The Reasons You Should Experience Upvc Window Repair
At The Very Least Once In Your Lifetime 257634.xyz
36035372.xyz says:
5 Laws To Help The Cheap Under Counter Fridge
Industry 36035372.xyz
www.36035372.xyz says:
20 Trailblazers Leading The Way In Bosch Side By
Side Fridge Freezer http://www.36035372.xyz
Counter-strike Cases says:
10 Undeniable Reasons People Hate Best CSGO Opening
Site Counter-strike Cases
https://www.oscarreys.top says:
How Slot Zeus Hades Demo Has Changed The History Of
Slot Zeus Hades Demo https://www.oscarreys.top
www.99811760.xyz says:
It’s The Perfect Time To Broaden Your Buy Spare Car Key Options http://www.99811760.xyz
www.0270469.xyz says:
This Most Common Asbestos Disease Mesothelioma Debate Isn’t As Black And White As You Think http://www.0270469.xyz
cassylawn.top says:
Ten Myths About Asbestos Attorney That Don’t Always Hold cassylawn.top
4452346 says:
17 Signs To Know You Work With L Sectional Sofa 4452346
www.023456789.xyz says:
15 Bizarre Hobbies That’ll Make You More Successful At 10kg Wash Machine
http://www.023456789.xyz
www.3222914.xyz says:
Do Not Forget Drip Coffee Machines: 10 Reasons Why You Don’t Need
It http://www.3222914.xyz
Claudia says:
Five Reasons To Join An Online Spare Key Maker Near Me Buyer And 5 Reasons Why You Shouldn’t Claudia
9363280 says:
15 Inspiring Facts About Claim For Asbestos The Words You’ve Never Learned 9363280
kaymell.uk says:
What Will Free Casino Slot Games Be Like In 100 Years? kaymell.uk
5611432.xyz says:
Many Of The Common Errors People Make With Key Programming 5611432.xyz
www.023456789.xyz says:
How Washing Machines 10kg Was The Most Talked About Trend In 2023 http://www.023456789.xyz
www.4182051.xyz says:
Coffee Machine For Home: What’s No One Has Discussed http://www.4182051.xyz
www.257634.xyz says:
Its History Of Repairs To Upvc Windows http://www.257634.xyz
3222914 says:
15 Gifts For The Mini Freezer Table Top Lover In Your Life 3222914
www.913875.xyz says:
Why Wood Stove Burning Is Relevant 2023 http://www.913875.xyz
https://www.9363280.xyz/ss7g-n59e2-g7xu53-v89b-gf2-1650/ says:
Why Asbestos Claim Still Matters In 2023 https://www.9363280.xyz/ss7g-n59e2-g7xu53-v89b-gf2-1650/
구글 상위노출 백링크 says:
Seo And Seo Techniques 구글 상위노출 백링크
버팀목 대출 says:
Barclays Banking Review – An Unbiased Look At Barclays Bank 버팀목 대출
프라그마틱 슬롯 팁 says:
Marketing Is Really A Long-Term Investment 프라그마틱 슬롯 팁
ventama.com says:
Some Foolproof Roulette Strategies At Winning At Roulette 프라그마틱 슬롯 (ventama.com)
omnihack says:
**Unlocking the Potential of OmniHack: Revolutionizing the World of Hacking**
In the ever-evolving landscape of cybersecurity and technology, the term “OmniHack” has emerged as a pivotal concept that promises to redefine the boundaries of ethical hacking. OmniHack represents a paradigm shift in how cybersecurity professionals approach vulnerability testing, penetration testing, and ethical hacking in general. This article delves into what OmniHack entails, its significance, and its implications for the future of cybersecurity.
**What is OmniHack?**
OmniHack can be best described as a comprehensive approach to ethical hacking that integrates various methodologies, tools, and techniques. Unlike traditional hacking practices that may focus on specific vulnerabilities or systems, OmniHack takes a holistic view. It encompasses a wide range of targets, including web applications, networks, mobile devices, and cloud infrastructures. The goal is not just to identify weaknesses but to provide a thorough assessment of an organization’s entire security posture.
**Key Features of OmniHack**
1. **Cross-Platform Compatibility:** OmniHack is designed to work across different platforms and environments. This versatility allows cybersecurity professionals to assess and secure complex infrastructures comprehensively.
2. **Automation and AI Integration:** Leveraging automation and artificial intelligence, OmniHack streamlines the process of vulnerability detection and analysis. This not only accelerates the testing phase but also enhances accuracy in identifying potential threats.
3. **Scalability:** Whether for small businesses or large enterprises, OmniHack offers scalable solutions tailored to the specific needs and complexities of each organization. This scalability ensures that cybersecurity efforts remain effective and efficient regardless of size.
4. **Continuous Monitoring and Assessment:** Beyond one-time assessments, OmniHack promotes continuous monitoring and assessment. This proactive approach helps organizations stay ahead of emerging threats and vulnerabilities in real-time.
**The Significance of OmniHack**
OmniHack represents more than just a technological advancement; it embodies a shift in mindset towards proactive cybersecurity. By adopting https://lopermedia.com/ methodologies, organizations can:
– **Enhance Security Posture:** By identifying and addressing vulnerabilities proactively, organizations can significantly reduce the risk of cyberattacks and data breaches.
– **Meet Compliance Requirements:** Many regulatory frameworks require organizations to conduct regular security assessments. OmniHack facilitates compliance by providing robust testing and reporting capabilities.
– **Boost Efficiency:** Automation and AI-driven processes streamline security assessments, allowing cybersecurity teams to focus on strategic initiatives rather than routine tasks.
– **Foster Innovation:** OmniHack encourages innovation in cybersecurity practices by integrating cutting-edge technologies and methodologies.
**The Future of OmniHack**
As technology continues to advance, so too will the capabilities of OmniHack. Future iterations may include enhanced AI capabilities, advanced threat modeling, and integration with emerging technologies such as blockchain and IoT security. Moreover, as cybersecurity threats become more sophisticated, OmniHack will play a crucial role in safeguarding digital assets and maintaining trust in the digital economy.
In conclusion, OmniHack represents a pivotal advancement in the field of ethical hacking and cybersecurity. By embracing its holistic and proactive approach, organizations can fortify their defenses against evolving cyber threats while fostering a culture of continuous improvement and innovation in cybersecurity practices. As we look towards the future, OmniHack is poised to lead the charge in securing the digital landscape for years to come.
omnihack
www.3222914.xyz says:
Freezer Table Top: The Secret Life Of Freezer Table Top http://www.3222914.xyz
9363280.xyz says:
Claim For Asbestos Tools To Make Your Everyday Life 9363280.xyz
5611432.xyz says:
The Most Hilarious Complaints We’ve Been Hearing About Car Key Programmer 5611432.xyz
Elsy Crays says:
How To Save Money On Car Locksmith Elsy Crays
Lynn Bolvin says:
15 Funny People Working In Fireplace Surround In Fireplace Surround Lynn Bolvin
kaymell says:
The Best Advice You Could Ever Receive About Slot kaymell
Mellissa says:
You’ll Never Guess This Upvc Window Repair’s Benefits upvc window repair – Mellissa –
Levi says:
Why We Enjoy Car Boot Scooter (And You Should Too!) Levi
www.5611432.xyz says:
Why We Love Key Programing (And You Should Also!) http://www.5611432.xyz
http://www.mecosys.com says:
How To Obtain Preapproved To Auto Loan 햇살론 무직자 대출 (http://www.mecosys.com)
https://www.eddafay.top/ says:
Five Killer Quora Answers On Bunk Beds Online
https://www.eddafay.top/
Bryant says:
15 Gifts For Your On The Wall Fireplace Lover In Your Life
Bryant
www.oscarreys.top says:
How Can A Weekly Akun Demo Zeus Vs Hades Project Can Change Your Life http://www.oscarreys.top
www.5611432.xyz says:
20 Myths About Key Reprogramming: Busted http://www.5611432.xyz
lynnbolvin says:
20 Things That Only The Most Devoted Fireplace Fans Know lynnbolvin
99811760.xyz says:
10 Signs To Watch For To Know Before You Buy Make Spare Car Key
99811760.xyz
www.836614.xyz says:
15 Undeniable Reasons To Love Caring For Pets http://www.836614.xyz
arlennizo.top says:
The Reason Behind Boot Mobility Scooter Is Everyone’s Passion In 2023
arlennizo.top
https://www.oscarreys.top/22f-s8e81-x2yx-7aut-9boo-3879 says:
How Slot Demo Zeus Vs Hades Anti Lag Altered
My Life For The Better https://www.oscarreys.top/22f-s8e81-x2yx-7aut-9boo-3879
99811760 says:
A New Trend In Spare Keys 99811760
Freemaple.Today says:
What’s The Current Job Market For Double Glazed Window
Repairs Professionals Like? Window Repair – Freemaple.Today,
프라그마틱 슬롯 says:
Answering Your Slot Machines Questions 프라그마틱 슬롯
836614 says:
The Reasons Designer Handbags Is Harder Than You Think 836614
upvc window repair says:
It Is The History Of Windows And Doors Luton In 10 Milestones
upvc window repair
Window repairs says:
Who Is The World’s Top Expert On Upvc Windows Luton? Window repairs
www.lynnbolvin.top says:
Check Out What Wall Mounted Electric Fireplace Tricks
Celebs Are Using http://www.lynnbolvin.top
www.99811760.xyz says:
10 Mobile Apps That Are The Best For Spare Car Key Maker
http://www.99811760.xyz
913875 says:
An In-Depth Look Back What People Said About Wood Stoves 20 Years Ago 913875
Arlen Nizo says:
5 Laws That Anyone Working In Car Boot Scooter Should Be Aware Of Arlen Nizo
프라그마틱 슈가러쉬 says:
Baccarat As Well As American Baccarat Rules 프라그마틱 슈가러쉬
untreated adhd in adults uk says:
10 Books To Read On Treatment For ADHD Adults untreated adhd in adults uk
the window Doctor near me says:
What Is The Window Doctor Near Me Term And How To Use It the window Doctor near me
mental Health Assessments says:
15 Reasons Not To Overlook Assessment In Mental Health mental Health Assessments
Cassy Lawn says:
15 Incredible Stats About Mesothelioma Asbestos Lung Cancer
Cassy Lawn
Les says:
Why Key Reprogramming Isn’t A Topic That People Are Interested In. Les
99811760 says:
17 Signs You Are Working With How Do I Get A Spare Car Key 99811760
www.0270469.xyz says:
15 Gifts For The Peritoneal Mesothelioma Not Caused By Asbestos
Lover In Your Life http://www.0270469.xyz
kaymell.uk says:
Casino Slots Free Tools To Improve Your Day-To-Day Life kaymell.uk
www.9363280.xyz says:
What You Should Be Focusing On Enhancing Asbestos Claim Payouts http://www.9363280.xyz
99811760.xyz says:
Why You Should Focus On Improving Spare Van Keys 99811760.xyz
Janelle says:
How To Get An ADHD Diagnosis UK Tools To Simplify Your Day-To-Day Life Janelle
Shinhwaspodium.Com says:
10 Myths Your Boss Has About Assessment Of Adult Adhd Assessment Of Adult Adhd Adult Adhd Assessment – Shinhwaspodium.Com,
대출 갈아타기 says:
Do You Might Need A Car Title Loan? 대출 갈아타기
913875 says:
Is Your Company Responsible For A Wood Burning Stove
Near Me Budget? 12 Top Notch Ways To Spend Your Money
913875
Lincoln says:
20 Fun Infographics About Mesothelioma Asbestos Lung Cancer Lincoln
kaymell.uk says:
7 Simple Tricks To Making A Statement With Your Online Slots kaymell.uk
구글상위노출 업체 says:
How Maximize Search Engine Traffic Using The Easy Way 구글상위노출 업체
www.jerealas.top says:
The Most Effective Reasons For People To Succeed In The Double Glazing Misting Repair Industry http://www.jerealas.top
백링크 says:
Do Yahoo And Google Pay Awareness To Meta Tag Cloud?
백링크
백링크 업체 says:
Starting A Write-Up Marketing Campaign – A Chronological
Checklist 백링크 업체
백링크 says:
Local Web Based Business Marketing And Link Building 백링크
학자금 대출 says:
Increased Plastic Card Payments – Helping You Retain Up 학자금 대출
playboy playmate says:
5 Laws To Help The English Pornstars Industry playboy playmate
백링크 작업 says:
Seo Course: Backlinking Your Way To Very Best 백링크 작업
www.5611432.xyz says:
What The 10 Most Stupid Program Car Keys Fails Of All Time Could
Have Been Prevented http://www.5611432.xyz
검색엔진최적화 방법 says:
Wink And Grow Rich Online, A Seo Perspective 검색엔진최적화 방법
Leslie says:
The Reason Behind What Is The Statute Of Limitations On Asbestos Claims Is The Most Popular Topic In 2023 Leslie
3222914 says:
The No. 1 Question Everybody Working In Table Top Freezer Black Should Know How To Answer 3222914
Vehicle lock out service says:
10 Real Reasons People Hate Car Lockouts Vehicle lock out service
99811760.xyz says:
What Is It That Makes Spare Key For Car Cost So Popular?
99811760.xyz
car Key battery Replacement says:
You’ll Never Guess This Car Key Battery Replacement’s Benefits car Key battery Replacement
구글상위노출 대행사 says:
Keyword Competition – Do Getting Linked To? 구글상위노출 대행사
seo 마케팅 says:
The Best Seo Company – Why It Doesn’t Exist seo 마케팅
weekendcoolers.com says:
How To Lower Your Credit Card Interest Rates Of Interest?
무직자 대출 [weekendcoolers.com]
Ann says:
15 Top Pinterest Boards Of All Time About Programmable Car
Keys Ann
구글상위노출 seo작업 says:
Seven Common Seo Mistakes 구글상위노출 seo작업
citroen key replacement cost says:
Guide To Citroen Key Replacement Cost: The Intermediate
Guide On Citroen Key Replacement Cost citroen key replacement cost
www.5611432.xyz says:
Why Car Key Programmer Near Me Is More Tougher Than You Imagine http://www.5611432.xyz
3222914 says:
20 Things You Must Know About Filter Coffee 3222914
glk-egoza.ru says:
20 Trailblazers Leading The Way In Best UK SEO Software
seo traffic software (glk-egoza.ru)
sonne-haagensen.Blogbright.net says:
You’ll Be Unable To Guess Window Repair Near Me’s Tricks window repair
Near me – sonne-haagensen.Blogbright.net –
fob Key Programming says:
Ten Programming Keys That Will Actually Improve Your
Life fob Key Programming
Byinna.Com says:
Why You Should Concentrate On Enhancing Commercial Coffee Machines Best Home Coffee Machine (Byinna.Com)
Mini countryman key says:
20 Trailblazers Leading The Way In Replacement Mini Keys Mini countryman key
Upvc Windows cost says:
What Do You Know About Upvc Window? Upvc Windows cost
Slots with free bonus Rounds says:
10 Places To Find Penny Slots Slots with free bonus Rounds
학자금 대출 says:
How To Set Up The R4 Ds Card 학자금 대출
구글상위노출 회사 says:
Internet Marketing Tips – Seo, Google Page Rank And Backlinks
구글상위노출 회사
Professional Slots says:
Guide To Professional Slots: The Intermediate Guide
To Professional Slots Professional Slots
Repair windows says:
Why The Window Repair Crawley Is Beneficial For COVID-19 Repair windows
구글상위노출 seo작업 says:
Social Media Marketing – Powerful Free Marketing Tool For
Internet Marketers 구글상위노출 seo작업
best seo company uk says:
The Best SEO Company UK Tricks To Rewrite Your Life best seo company uk
Glazing doctor says:
Guide To Double Glazing Doctors: The Intermediate Guide The Steps To Double Glazing Doctors Glazing doctor
upvc window Repair says:
The Unspoken Secrets Of Window Repair Near upvc window Repair
https://www.9326527.xyz/ says:
15 Gifts For The Adult ADHD Diagnosis Lover In Your Life https://www.9326527.xyz/
korsgaard-gray-3.blogbright.net says:
Guide To Double Glazing Doctors: The Intermediate Guide
In Double Glazing Doctors double glazing doctors (korsgaard-gray-3.blogbright.net)
best adhd Medication for adults with anxiety says:
Best ADHD Medication For Adults With Anxiety Tools To Ease Your Everyday Lifethe Only Best ADHD Medication For Adults With Anxiety Trick That Every Person Should Learn best adhd Medication for adults with anxiety
Terrell says:
What’s The Job Market For Double Glazing Near Me Professionals?
double glazing near me (Terrell)
telegra.ph says:
10 Unexpected Lost Lexus Key Tips lexus key fob replacement near Me (telegra.ph)
upvc window repairs near me says:
10 Reasons Why People Hate Upvc Window Repairs
Upvc Window Repairs upvc window repairs near me
Phillip says:
Why Nobody Cares About 3 Wheeler Pushchairs Phillip
How Do I Get My Son Assessed For Adhd says:
10 Wrong Answers To Common Private Adhd Assessment Questions
Do You Know The Correct Answers? How Do I Get My Son Assessed For Adhd
replacement Double glazed units Near me says:
10 Places Where You Can Find Double Glazed Units Near Me replacement Double glazed units Near me
Susanna says:
10 Erroneous Answers To Common Honda Replacement
Key Uk Questions Do You Know The Right Answers? lost honda car keys (Susanna)
Wownsk-Portal.Ru says:
What’s The Job Market For Private ADHD Assessment Manchester Professionals Like?
Private Adhd Assessment Manchester – Wownsk-Portal.Ru –
Windows High Wycombe says:
9 Lessons Your Parents Teach You About Double Glazed Windows High Wycombe Windows High Wycombe
Window Repair Company says:
15 Weird Hobbies That Will Make You More Successful At Replacement Windows Luton Window Repair Company
Slot Wins says:
Why You Should Concentrate On Enhancing Slot Sound Effects Slot Wins
double glazed repairs near me says:
What’s The Job Market For Double Glazed Repairs Near Me Professionals Like?
double glazed repairs near me
4182051 says:
20 Things You Should Be Educated About Best Coffee Machines 4182051
real casino slots says:
Avoid Making This Fatal Mistake When It Comes To Your Slot Adventures real casino slots
257634.xyz says:
A How-To Guide For Repair Window From Start To Finish 257634.xyz
Inpatient anxiety treatment says:
It’s The Perfect Time To Broaden Your Generalized Anxiety
Treatment Options Inpatient anxiety treatment
검색엔진최적화 마케팅 says:
How To Get More Traffic To Your Business Website 검색엔진최적화 마케팅
lynnbolvin says:
11 Ways To Completely Sabotage Your Wall-Mounted Fireplace lynnbolvin
프라그마틱 환수율 says:
Paulson French Fries – Product Review 프라그마틱 환수율
검색엔진최적화 전문가 says:
10 Reasons You Always Be Thinking About Seo 검색엔진최적화 전문가
https://www.ensembl.org says:
A Needs To Know About Keyword Search And Seo Tips 백링크 조회 – https://www.ensembl.org –
Repair upvc windows says:
The Three Greatest Moments In Upvc Windows Repair
History Repair upvc windows
검색엔진최적화 메타태그 says:
7 Reasons As To Why Web Page Operating Needs Seo Service 검색엔진최적화 메타태그
Double Glazed Units Near Me says:
Guide To Double Glazed Units Near Me: The Intermediate Guide The Steps To
Double Glazed Units Near Me Double Glazed Units Near Me
검색엔진최적화 업체 says:
Improve Your Internet Traffic With 5 Guaranteed Seo Services 검색엔진최적화 업체
Gerardo says:
The History Of Window Doctor wooden window repair [Gerardo]
knitcreationsla.com says:
5 Steps To A Remarkable Seo Campaign 백링크 대행 (knitcreationsla.com)
구글지니어스 says:
Selecting A Market Using 3 Google Search Commands 구글지니어스
대출 갈아타기 says:
Why What Is Get A Credit Card Over A Debit Card? 대출 갈아타기
http://jjordan.com/__media__/js/netsoltrademark.php?d=dokuwiki.stream/wiki/How_Are_Late_Fees_And_Payments_Handled_On_Home_Loan_Modification_Plans says:
Avoid Costly Bank Fees By Using A Green Dot Card 직장인 대출 (http://jjordan.com/__media__/js/netsoltrademark.php?d=dokuwiki.stream/wiki/How_Are_Late_Fees_And_Payments_Handled_On_Home_Loan_Modification_Plans)
개인돈 대출 says:
Is It Effective Medicaid Planning Cannabis To Add Someone’s Name To Banking Account?
개인돈 대출
Www.Instapaper.com says:
Ten Upvc Window Doctors That Really Improve Your Life window
doctors, http://Www.Instapaper.com,
double glazed Window repairs Near me says:
Why Everyone Is Talking About Windows Repair Right Now double glazed Window repairs Near me
Asbestos claim says:
A lawsuit against negligent asbestos manufacturers must be
filed within a specific timeframe, called the statute of limitations.
Once a person or a family member realizes they have
an Asbestos claim-related illness, the clock starts
ticking.
월세 보증금 대출 says:
Meet Your Requirements And With Usecured Bank Loans 월세 보증금 대출
seattleseahawks.com says:
Get Payday Loan Online Questions Answered Here 국민은행 대출 (seattleseahawks.com)
신생아 특례 대출 says:
A Car Loan Guide For Pupils 신생아 특례 대출
https://telegra.ph/ says:
15 Astonishing Facts About Leeds Door And Window double glazed doors repairs
(https://telegra.ph/)
humanlove.stream says:
Unsecured Debt Management Consolidation Loans 소상공인 대출 (humanlove.stream)
Double Glazing Lock Repairs says:
Enough Already! 15 Things About Door Fitter Luton We’re Overheard Double Glazing Lock Repairs
100만원 대출 says:
Using Banking For Payment System 100만원 대출
emergency Patio Door repair says:
Guide To Emergency Patio Door Repair: The Intermediate Guide To Emergency Patio
Door Repair emergency Patio Door repair
birmingham specialist glass says:
10 Things We Are Hating About Birmingham Double Glazing birmingham specialist glass
연체자 대출 says:
San Diego Va Changes Loan Limits In 2011 연체자 대출
대학생 대출 says:
The Wage Day Loan For Every Your Needs 대학생 대출
Morphomics.Science says:
10 Window Doctor Cambridge Tricks All Experts Recommend Double Glazing Repairs (Morphomics.Science)
프라그마틱 카지노 says:
Set Of 200 8G Hot Stamped Poker Chips And 4 Card Decks Review 프라그마틱 카지노
Auto Accident says:
What’s The Job Market For Auto Accident
Litigation Professionals? Auto Accident
motor vehicle Accidents says:
The Sage Advice On Motor Vehicle Lawyer From An Older Five-Year-Old motor vehicle Accidents
백링크 업체 says:
Buy Online Traffic – 3 Great Places To Acquire High Quality Traffic 백링크 업체
프라그마틱 홈페이지 says:
Review Of Vegas Red Online Casino 프라그마틱 홈페이지
신혼부부 대출 says:
Finding A Negative Credit Mortgage 신혼부부 대출
British porn star says:
UK Onlyfans Pornstars Explained In Fewer Than 140
Characters British porn star
햇살론 무직자 대출 says:
Immediate Releases Of Irs Wage Levy/Irs Bank Garnishments – Golden Tips 햇살론 무직자 대출
구글SEO says:
Increase Your Pursuit Engine Rankings – Off-Page Seo 구글SEO
검색엔진최적화 방법 says:
The Simplest Way To Get Traffic To My Website 검색엔진최적화 방법
무직자 대출 says:
How To Identify A Unsecured Personal Loan For Nominal
Rates? 무직자 대출
백링크 프로그램 says:
Get Ranked, Get Search Engine Optimized 백링크 프로그램
워드프레스 seo says:
Is Website Link Building Campaign A Roadmap?
워드프레스 seo
햇살론 대출 says:
How To Enhance Credit Ratings With Bank Loans For
Credit History History 햇살론 대출
신혼부부 대출 says:
What Should Work In The Hardship Letter For A Mortgage Loan Modification? 신혼부부 대출
bovaalpaca.com says:
Auto Refinance – Solve Your Car Loan Installments 소액 대출 (bovaalpaca.com)
top Pornstar only fans says:
You’ll Never Be Able To Figure Out This Top Pornstar Only Fans’s
Tricks top Pornstar only fans
best newcomer Pornstar says:
Best Newcomer Pornstar Tools To Make Your Everyday Lifethe Only Best Newcomer Pornstar Technique Every Person Needs To Be Able To best newcomer Pornstar
https://www.cucumber7.com/ says:
Amazing data Regards.
Also visit my web site: https://www.cucumber7.com/
Special Slots says:
Nine Things That Your Parent Teach You About Special Slots Special Slots
https://www.cucumber7.com/ says:
Good facts Thank you.
Look at my web site – https://www.youtube7.com/
slot themes says:
Five Killer Quora Answers On Slot Themes slot themes
slot Symbols says:
7 Secrets About Winning Slots That No One Will Tell You slot Symbols
https://www.hardwarebabes.com says:
How Penny Slots Has Become The Most Sought-After Trend In 2023
casino Slots guide (https://www.hardwarebabes.com)
Selina says:
The 10 Most Scariest Things About Free Spin Slots free spin slots (Lara)
Latest Slots says:
A Look Into The Secrets Of New Slots Online Latest Slots
low variance Slots says:
10 Facts About Slot Variance That Will Instantly Put You In The Best Mood low variance Slots
Best Payouts Slots says:
10 Websites To Help You Develop Your Knowledge About Slot Machine Games Best Payouts Slots
орехово зуево автобус до москвы says:
знакомство по электронной почте в москва дешевые жд билеты
спб москва определение адреса судебных приставов
по адресу должника москва сбербанк москва расписание
하이오피 says:
Massage Therapy Relieves Headaches 하이오피
광주마사지 says:
Tips For Having A Fun Hen Party In Dublin 광주마사지
hellotoy.co.kr says:
Tips To Have A Fun Hen Party In Dublin 광주오피 – hellotoy.co.kr,
중구오피 says:
Las Vegas Coupons Will Save You Money 중구오피
raleightruckinjurylawyer.com says:
Three Short Shopping Home Theater Systems 유성구오피 (raleightruckinjurylawyer.com)
하이오피주소 says:
How To Add Girls At Bars 하이오피주소
сколько раз нужно читать молитву на красную нить says:
какой у льва дерево по гороскопу если снится что во сне пытаются убить знак зодиака
овен какой камень драгоценный
подходит
молитва перед всецарицей обогащенный уран купить,
цена урана за кг 2024
https://king-wifi.win/wiki/There_Are_Several_Las_Vegas_Hotels_But_None_Beat_The_Bellagio_Hotel says:
50Th Wedding Ideas – Celebrate One Milestone Of Life 남구오피
(https://king-wifi.win/wiki/There_Are_Several_Las_Vegas_Hotels_But_None_Beat_The_Bellagio_Hotel)
오피 says:
Are Divorced Women Angry, Desperate, And Miserable? 오피
worldwide-powerstrips.com says:
Three Short Shopping Tips For Home Theater Systems 제주밤문화 – worldwide-powerstrips.com –
서울밤문화 says:
Deep Tissue Massage Therapy – Might It Be For Meatheads?
서울밤문화
대전밤문화 says:
Meet Single Vietnam Women At Vietnamese Dating Sites 대전밤문화
대구오피 says:
Las Vegas Coupons Can Help To Save You Money 대구오피
연체자 대출 says:
Best Graphics Card For The Investment 연체자 대출
betofin.com says:
Supplies And Party Products On Children’s Parties 제주마사지 – betofin.com,
서울오피 says:
People Who Have Loved Massage Chairs 서울오피
серпімді және серпімсіз says:
ас туралы мақал мател, ас нан туралы мақал он юн национальная идея текст межкомнатные
двери в шымкенте со склада, мир дверей
шымкент цены диализ бүйрек ауруын
емдеу жолы, бүйрек аурулары белгілері
nude photography classes says:
Hi there mates, its fantastic piece of writing about teachingand fully defined, keep it up all the time.
отбасы туралы әңгіме құрау says:
апталық атаулары, апта туралы ертегі
теңіз климаты мен емдеу павлин құсы туралы мәлімет, тауыс туралы қысқаша мәлімет қарақат қара көзің скачать, қарақат қара
көзің текст
zenwriting.net says:
Online Slot Tournaments 프라그마틱 슬롯무료 – zenwriting.net –
프라그마틱 정품 확인법 says:
Online Gambling – Its Advantages And Drawbacks 프라그마틱 정품 확인법
무료 프라그마틱 says:
Learning To Play Poker Expert 무료 프라그마틱
filmsgood.ru says:
How To Get Women – 5 Tips 북구오피 (filmsgood.ru)
프라그마틱 불법 says:
Online Casinos – Casino Wars Are Perfect Beginners 프라그마틱 불법
대출 이자 계산기 says:
Bank Lending Programs 대출 이자 계산기
willysforsale.com says:
Best Graphics Card For Cash 주부 대출 (willysforsale.com)
부산유흥사이트 says:
Invest In The Gold Biscuit Today 부산유흥사이트
работа ночью минск подработка says:
работа помощница по дому в москве без опыта работа на дому сочи
в декрете идеи для работы удаленно как можно заработать
деньги в интернете без вложений реальные деньги
하이오피 says:
Social Club 하이오피
фриланс вакансии телеграм says:
работа на дому саратов вакансии для женщин в декрете саратов чем занимается методист в университете заработать на видео онлайн принцип работы дистанционного пульта
Pornstar kayleigh says:
What’s The Current Job Market For Pornstar Kayleigh Wanless
Professionals? Pornstar kayleigh
https://flipboard.com says:
I’m gone to tell my little brother, that he should also visit this weblog on regular basis to take updated from latest news update.
ticktok pornstars says:
The 10 Most Terrifying Things About Ticktok Pornstars ticktok pornstars
CasinosEdge.Pro says:
Casinos Online – What Can Your Learn From Your Critics CasinosEdge.Pro
greenberg-winther-3.Blogbright.Net says:
You’ll Never Be Able To Figure Out This Auto Locksmiths Near Luton’s Tricks auto locksmiths near luton (greenberg-winther-3.Blogbright.Net)
Https://nx.dayibin.com says:
14 Questions You’re Refused To Ask Car Locksmiths Near Luton Best luton auto locksmith (https://nx.dayibin.com)
Car locksmiths Luton says:
The 9 Things Your Parents Teach You About Car Locksmiths Luton Car locksmiths Luton
Zachery says:
10 Of The Top Facebook Pages That I’ve Ever Seen. Car Locksmiths Luton luton car locksmiths, Zachery,
auto locksmith luton says:
See What Auto Locksmith Luton Tricks The Celebs Are Making
Use Of auto locksmith luton
Best auto locksmiths in luton says:
Enough Already! 15 Things About Best Auto Locksmiths Luton We’re Sick Of
Hearing Best auto locksmiths in luton
Norine says:
You’ll Be Unable To Guess Best Car Locksmiths Near Luton’s Secrets
car locksmiths near luton (Norine)
주소모움 says:
10 Things Your Competitors Can Teach You About Gather Site Addresses 주소모움
казино с бонусом за регистрацию says:
Погрузитесь в мир азарта с Hype Casino — место для настоящих ценителей азартных игр, представляющее топовые слоты, популярные настольные игры, а также эксклюзивные предложения, помогающие увеличить ваши выигрыши! https://besplatnosoft.ru/.
Какие преимущества предлагает Hype Casino?
Быстрые финансовые операции и скрытых платежей.
Разнообразие развлечений от классики до новинок.
Эксклюзивные предложения, делающие игру еще выгоднее.
Начните играть прямо сейчас и почувствуйте настоящий азарт!
игры с бонусами says:
Готовы к захватывающей игре? Добро пожаловать в Hype Casino! На нашей платформе доступны топовые игровые автоматы, рулетка, покер и блэкджек, а также щедрые поощрения чтобы сделать игру еще увлекательнее. https://hype-playcraze.wiki/.
Какие преимущества у Hype Casino?
Надежные и безопасные финансовые операции без задержек.
Большой выбор игр, представляющих лучшие разработки индустрии.
Ежедневные акции и VIP-статусы, улучшающие ваш игровой опыт.
Регистрируйтесь в Hype Casino и выигрывайте реальные деньги!
Admiral X Litecoin casinos says:
Ready to step into the world of excitement? AdmiralX Casino is the place where winners play! On this site, you’ll find the best slots, poker and blackjack tables, and real croupiers, bringing the casino experience to life. https://admiralx-casinosavvy.pics/.
What sets AdmiralX apart?
Ongoing promotions for active players.
Quick and easy sign-up, without unnecessary verification.
Huge game selection, featuring top-rated titles.
Don’t miss your chance to win big!
can i take two 5mg cialis at once says:
douhle tadalafil 5mg best price biarlah canadian pharmacy for cialis for sale https://cialis-otc.com/ – cialis generic [url=https://cialis-otc.com]how much is cialis without insurance[/url] adejiny tadalafil purchase
безопасное казино 1Go casino says:
В 1GO Casino предлагается увлекательный игровой опыт для всех любителей азарта. Здесь вы можете испытать лучших игр, где каждый найдет что-то для себя. В 1GO Casino собраны все популярные игры, включая рулетку, покер, блэкджек и слоты. Тем не менее, серьезные игроки выбирают наш особый подход к обслуживанию ивысококачественные игровые предложения. Согласно множеству отзывов, около 80% игроков утверждают, что участие в турнирах помогают значительно увековечить свой успех. Любая игра в нашем казино – это шанс на крупный выигрыш и неограниченные возможности для выигрыша – https://1go-casinorush.website/responsible-gaming.
Когда же лучше всего участвовать в играть в 1GO Casino? Ответ прост – когда угодно!
Есть, когда стоит сэкономить время и легко начать играть в 1GO Casino:
Перед тем как начать правилами казино.
Для опытных игроков – мы предлагаем специальные VIP-программы для покорения вершин успеха.
Если вы вернулись после долгого перерыва Начните с бесплатных версий игр, чтобы свежо войти в игру.
Herpafend Supplement says:
Whether OTC or in-office testing is needed relies on the reason you’re taking the supplements.
my blog – http://47.110.52.132:3000/tamnimmo827065/1278370/wiki/Supplements-Showdown-Best-Options-for-Herpes-Relief
cialis for daily use dosage says:
miliqn cialis discount coupons melassa synthesis of tadalafil https://ciatadgen.com/ – cialis over the counter in spain [url=https://ciatadgen.com]generic tadalafil in us[/url] soyut how to get cialis cheap
https://www.harvard.edu/ says:
# Harvard University: A Legacy of Excellence and Innovation
## A Brief History of Harvard University
Founded in 1636, **Harvard University** is the oldest and one of the most prestigious higher education institutions in the United States. Located in Cambridge, Massachusetts, Harvard has built a global reputation for academic excellence, groundbreaking research, and influential alumni. From its humble beginnings as a small college established to educate clergy, it has evolved into a world-leading university that shapes the future across various disciplines.
## Harvard’s Impact on Education and Research
Harvard is synonymous with **innovation and intellectual leadership**. The university boasts:
– **12 degree-granting schools**, including the renowned **Harvard Business School**, **Harvard Law School**, and **Harvard Medical School**.
– **A faculty of world-class scholars**, many of whom are Nobel laureates, Pulitzer Prize winners, and pioneers in their fields.
– **Cutting-edge research**, with Harvard leading initiatives in artificial intelligence, public health, climate change, and more.
Harvard’s contribution to research is immense, with billions of dollars allocated to scientific discoveries and technological advancements each year.
## Notable Alumni: The Leaders of Today and Tomorrow
Harvard has produced some of the **most influential figures** in history, spanning politics, business, entertainment, and science. Among them are:
– **Barack Obama & John F. Kennedy** – Former U.S. Presidents
– **Mark Zuckerberg & Bill Gates** – Tech visionaries (though Gates did not graduate)
– **Natalie Portman & Matt Damon** – Hollywood icons
– **Malala Yousafzai** – Nobel Prize-winning activist
The university continues to cultivate future leaders who shape industries and drive global progress.
## Harvard’s Stunning Campus and Iconic Library
Harvard’s campus is a blend of **historical charm and modern innovation**. With over **200 buildings**, it features:
– The **Harvard Yard**, home to the iconic **John Harvard Statue** (and the famous “three lies” legend).
– The **Widener Library**, one of the largest university libraries in the world, housing **over 20 million volumes**.
– State-of-the-art research centers, museums, and performing arts venues.
## Harvard Traditions and Student Life
Harvard offers a **rich student experience**, blending academics with vibrant traditions, including:
– **Housing system:** Students live in one of 12 residential houses, fostering a strong sense of community.
– **Annual Primal Scream:** A unique tradition where students de-stress by running through Harvard Yard before finals!
– **The Harvard-Yale Game:** A historic football rivalry that unites alumni and students.
With over **450 student organizations**, Harvard students engage in a diverse range of extracurricular activities, from entrepreneurship to performing arts.
## Harvard’s Global Influence
Beyond academics, Harvard drives change in **global policy, economics, and technology**. The university’s research impacts healthcare, sustainability, and artificial intelligence, with partnerships across industries worldwide. **Harvard’s endowment**, the largest of any university, allows it to fund scholarships, research, and public initiatives, ensuring a legacy of impact for generations.
## Conclusion
Harvard University is more than just a school—it’s a **symbol of excellence, innovation, and leadership**. Its **centuries-old traditions, groundbreaking discoveries, and transformative education** make it one of the most influential institutions in the world. Whether through its distinguished alumni, pioneering research, or vibrant student life, Harvard continues to shape the future in profound ways.
Would you like to join the ranks of Harvard’s legendary scholars? The journey starts with a dream—and an application!
https://www.harvard.edu/
https://gazetablic.Com says:
You’ll get a lean, vascular, and dry physique with correct food regimen and coaching. This is the ultimate word result for any cutting cycle, but you want to put in the work. Shutdown is likely on this cycle, so you’ll need to add a SERM or a testosterone base early on. Some individuals may be vulnerable to high blood pressure and elevated glucose ranges.
However you have to think about the possible further positive benefits and unwanted side effects you’ll get (if any). Stacking means you’re additionally introducing a model new set of unwanted aspect effects, plus amplifying any negatives that every compound shares16. Another widespread strategy is to stack a dry SARM with one that promotes fat loss. This creates a slicing or contest prep stack involving dry SARMs like Ostarine, RAD-140, or S4 combined with SR-9009 or Cardarine.
A visit to a dermatologist and taking prescription drugs to control acne is one thing quite lots of Masteron users resort to. Masteron is commonly utilized close to the tip of a cycle to scale back water retention, dry you out, improve vascularity, and tighten and harden your physique. You can get that rock-hard and incredibly chiseled look you see on the contest stage. Nonetheless, the danger of side effects is considered excessive with Masteron – not only virilization as a outcome of Masteron’s anti-estrogenic properties (despite its primary medical use being for females). 200mg per week can present all the consequences you need for a pre-contest cycle, usually used in the final weeks of a longer slicing or lean bulk cycle.
Take 15mg daily of MK-677 for the whole week cycle and 6mg daily of LGD-4033 for the first eight weeks. Starting low is a good suggestion as a result of the results of this stack come on hard and quick. 15mg daily of RAD140 and 10mg every day of YK11 is an effective start line.
While a couple of other steroids have medical approval to be used in people at low doses, Trenbolone isn’t considered one of them. This means not solely is Tren not deemed appropriate for human use at a really low dosage if used medically, but we additionally haven’t any stable information about what larger doses and long-term use do to the body. These who are wholesome and stick to reasonable doses and short cycles with suitable breaks in between will minimize risks to those vital organs. You ought to be aware that it’s frequent for urine colour to turn out to be darker when utilizing Trenbolone, and this is often mistaken for blood or a sign of kidney toxicity. Still, the most common cause why is steroid use among athletes dangerous to their health [https://gazetablic.com/new/?clenbuterol_dosage_5.html] the traditional oxidation of Trenbolone, leading to a dark, rusty colour.
With only one-fifth of the aromatizing tendency of testosterone, Deca produces fewer androgenic side effects. Nevertheless, it will normally be offset by the addition of testosterone in any Deca cycle. As Quickly As you’ve finished a Deca cycle, including another further steroids, a post-cycle therapy (PCT) schedule is crucial to recuperate your natural hormone operate. Of course, performance use isn’t the meant objective of Deca-Durabolin, and medical doses would not often match those utilized by bodybuilders. This means any positive and unfavorable results of Deca that you simply examine regarding its medical use won’t essentially match your personal expertise. Nandrolone won’t convert to DHT, which implies it’s a popular steroid by those desirous to keep away from DHT-related unwanted aspect effects like hair loss. The results could be phenomenal, so I’ve continuously shaken my head at individuals who claim it’s not value using or had been dissatisfied in their results.
Anabolic steroids also come with varying ranges of danger and legality, with unlawful steroids posing vital health and legal risks. Winstrol cycle and Deca Durabolin cycle characterize two in style options, showcasing the range in steroids to reinforce muscle growth and performance. Because we’re using steroids for efficiency enhancement and bodybuilding, the compounds are being taken at doses a lot larger than if they were used for medical purposes. The higher your dosage, the greater your risk of adverse health effects. Yes, it’s extremely important to carefully weigh the risks and benefits of using oral steroids for muscle growth.
Anabolic steroids are firmly classed as managed substances within the US and most Western nations. This means there are penalties for supplying and transporting steroids and, in some circumstances, for being caught with small amounts for personal use. Your physician can advise on the best action to take should you endure from blood thickness whereas using SARMs. This may include aspirin or different antiplatelet therapy or anticoagulation therapy with medication like warfarin. If staying asleep all night is a problem, then magnesium, glycine, and vitamin B6 have long been used to solve this problem.
Emilie says:
Oxandrolone (Anavar) is a 17aa oral steroid that offers you an excellent strength enhance with minimal dimension gains and little or no water retention. On the other hand, you can look at Anavar-only cycles as well as a deviation from utilizing testosterone as the first compound. Anavar-only 6-8 weeks cycles might be between 40mg and 100mg day by day dosing, with much less suppression than Dianabol.
These medicine may decrease the damage that happens to muscular tissues during a hard workout. Some individuals additionally may like how their muscular tissues look once they take these medication. All anabolic steroids enhance exogenous testosterone ranges and reduce endogenous (natural) ranges. In terms of pure muscle tissue being constructed, trenbolone can rival any bulking steroid. Nonetheless, because it doesn’t cause excessive weight acquire due to water loss and fats loss, it takes the 4th spot.
In Accordance to studies, it promotes significant nitrogen retention and protein synthesis within muscle cells, leading to faster buildup of dense, quality muscle tissue. Many customers expertise dramatic features in dimension and scale within only a few weeks of cycling this potent oral steroid. Dianabol is a relatively strong estrogenic anabolic steroid because of the average level of aromatase activity it carries. Whereas its aromatase exercise is just moderate, this conversion actually leads Methandrostenolone to be transformed to methylestradiol rather than estradiol, which is way extra highly effective than estradiol. This can make unwanted facet effects like gynecomastia and water retention very potential with this steroid; actually, they will seem seemingly overnight. Heavy water retention can even promote hypertension, which Dianabol is notorious for causing.
However it’s all the time a good suggestion to check with different AAS because Dbol won’t all the time be the greatest option in your objectives. I would also wish to know how completely different AAS will deliver additional benefits to a stack. It’s also fascinating to match Dbol to other oral steroids as we are able to see how unique it is (with most different orals being dry-cutting steroids). Advanced Dbol users often do a short, sharp cycle utilizing other quick estered compounds for probably the most dramatic and rapid results.
If you are trying to chop fats and get lean, the beneficial dose is 20-30mg per day. This signifies that half of the lively compound is metabolized and cleared from your bloodstream inside that time. As A End Result Of of this quick half-life, most customers dose Dianabol multiple instances per day (e.g., morning and evening) to take care of steady blood levels and decrease hormone crashes. The thought is not to lose positive aspects however maintain them with the assistance of a weak AAS dosage. Undoubtedly a few of you wish to buy Dianabol, so let’s move on to explaining the treatment Dianabol and its effects on the human body. But a successful physical transformation isn’t simple and it’s essential to find out about anabolic steroids and their effects; it might be that one other steroid will work better for you. To reap the advantages of this anabolic steroid, users must maintain any apparent bulking, or it’s going to shortly disappear.
Regardless Of this, Dianabol is extensively obtainable amongst steroid suppliers, however care must be taken to make sure counterfeits aren’t being purchased. New steroid customers could be surprised to be taught that there are hundreds upon hundreds of labs around the globe manufacturing anabolic steroids. These underground labs can be something from a tiny yard setup run by one person to a significant operation in a manufacturing facility. Much of the raw materials required to make steroids in these labs comes from sources in Eastern Europe and China.
Dianabol is a really effective steroid for bodybuilding, but it’s essential to correctly cycle it in order to get probably the most out of it while minimizing any potential unwanted effects. Typically, you’ll wish to take dianabol for sale in usa for six weeks at a time, with a minimum of six weeks off in between cycles. Throughout your six-week cycle, take mg per day, and ensure to incorporate an excellent PCT program to help restore natural testosterone production. They work by increasing protein synthesis and nitrogen retention in muscular tissues, resulting in muscle growth and elevated strength. Nonetheless, oral steroids, including Dianabol, could be extra dangerous to the liver compared to injectable steroids and come with a range of potential side effects of steroids in females (http://kieranlane.com/wp-content/pages/spike_in_libido.html) effects.
In general, 37% of steroid users will experience some form of gynecomastia (11). Oral steroids are also hepatotoxic; subsequently, we often see deteriorations in hepatic health from bodybuilders using oral steroids. There can be exceptions to this rule, with testosterone undecanoate, Anavar, and Primobolan being examples of oral steroids that pose little to no hepatic (liver) pressure. Nevertheless, Dianabol, Anadrol, and Winstrol are popular orals, while testosterone undecanoate and Primobolan are much less widespread. These doses are a lot greater than people who well being care providers use for medical causes.
Nonetheless, in hardcore bodybuilding cycles that always extend well past the 12 week mark, it will be attainable to implement both phases of use with necessary C17-aa breaks. Regardless of the sort of use, dose or timing schedule you utilize, you will find Dianabol stacks nicely with all anabolic steroids. Dianabol is a C17-alpha alkylated anabolic steroid, and consequently, carries a hepatotoxic nature. The price of hepatotoxicity can range significantly from one C17-aa steroid to the next, and whereas Dbol is far from the most poisonous, we can’t name it delicate both. However, its complete toxicity shouldn’t lead to liver damage if responsible use is followed and the liver was healthy to start with. During use, liver enzyme values will enhance, however it’s essential to remember will increase in values doesn’t equate to wreck but somewhat stress and potential damage.
However, most might be way more satisfied with a 20-25mg per day dosing. Hold in mind, each time we increase the dose, this increases the chance of unfavorable unwanted effects and makes them tougher to control. If a optimistic expertise is enjoyed within the 20-25mg range, 30-35mg per day could be attempted if desired.
steroid side effects pictures says:
Weight loss might occur as a end result of increased metabolism that steroids may cause. Nonetheless, weight loss may also be as a outcome of increased appetite that steroids may cause. In order for steroids to be metabolized, they have to undergo enzymes that degrade their physiologic activity and improve their water solubility. As a outcome, nearly all of serum cortisol is transformed to dihydrocortisol and tetrahydrocortisol, that are then converted to glucuronic acid. As A Result Of steroid hormones regulate energy metabolism, stress responses, salt balance, and sexual growth and performance, they can have a major impact on metabolism.
That’s as a result of that is the strongest chopping agent on the market for anyone looking to lose fat. It will just amplify fats loss at a fee like you may have by no means experienced earlier than. But, it doesn’t sacrifice muscle mass or muscle definition while promoting fats loss. One Other common myth is that steroids are protected and harmless, and that they do not have any severe unwanted facet effects.
Apparently, Clenbuterol has proven some anabolic traits, notably in its capacity to grow skeletal muscle in animal research. Some women report that it aids in muscle constructing and strength enhancement, whereas others observe minimal advantages. The misconception that Anadrol is inappropriate for women could stem from the bodybuilding group’s limited sensible understanding of https://docpulse.com/pgs/?weight_loss_pills_1.html results on females. This gap in knowledge is partly as a outcome of steroids being much less frequently utilized by girls, resulting in fewer shared private experiences throughout the health group. Whether Or Not you’re utilizing whey protein, creatine, or a full CrazyBulk legal steroid stack, the benefits are undeniable when paired with disciplined training and nutrition. It can also be very important to notice that some people are required to utilize anabolic dietary supplements to find a way to gain weight after sickness or other well being concerns.
There is a standard notion in bodybuilding that when an individual comes off steroids and trains naturally, they will lose their positive aspects. Some anabolic steroids have diuretic results due to an absence of aromatase activity (conversion of testosterone into estrogen). This can result in a dry physique with more seen muscle striations and definition.
And whereas there are reliable reasons to make use of these drugs to suppress the immune system or relieve joint ache from irritation, it’s this kind of weight impression that doctors need to fastidiously monitor. All this means that these drugs might make you eat more, retailer more fat, and end up with plenty of retained fluid to add to your general weight. Neither the authors nor the writer are answerable for any damages or losses which will happen from using information supplied on this website. At All Times make well-informed choices and speak together with your healthcare supplier when in doubt.
For a mean grownup, the conventional heart fee ranges between 60–100 beats per minute. Due To This Fact, extreme heart rates resulting from excessive Clenbuterol doses can pose cardiac dangers. Oxandrolone, commonly known as Anavar, is often known as the ‘ladies’s steroid’ due to its effectiveness and recognition amongst female purchasers at our clinic, lots of whom report constructive outcomes. We needed to bear in mind of the producer of the steroids that we selected. For the greatest possible outcomes and to make sure that you are completely happy, we selected five well-known firms that have acquired optimistic comments and scores across the internet.
Other steroids with high aromatase activity could cause fluid retention, leading to bloating and giving a smooth look to the muscle tissue. This is especially common in slicing steroids, leading to a ripped appearance in customers who’re already lean. Steroids will increase masculine facial features, such as strengthening the jawline and making the eyes more angular. Unfortunately, we have also seen this in female patients (when taking virilizing steroids). Steroids additionally enhance pink blood cell manufacturing, enhance blood circulate to the muscles, and help vascularity.
Tren-Max supplies a protected and efficient way to enhance your performance and physique without compromising your well being. However with its potency comes the necessity for correct dosing, cycling, and sourcing. In this text, I’ll break down tips on how to use Tren successfully, the best ways to stack it, and most significantly, where you should buy Tren online safely and legally. When we hear the words “body fat” we’re led to consider that every one fats is equal and that every one fats are unhealthy for us.
Steroids for cutting says:
70918248
References:
https://bycom.fr/mastering-time-management-key-to-business-success/
caurismedias.com says:
70918248
References:
do anabolic steroids work (http://caurismedias.com/index.php/2023/04/13/le-1er-imam-de-conakry-tranche-un-mari-qui-a-abandonne-sa-femme-ne-doit-pas-se-meler-a-son-inhumation/)
лучшие игры с модами на андроид 2024 says:
лучшие игры с модами на андроид 2024 — это замечательный способ изменить игровой опыт.
Особенно если вы играете на Android, модификации открывают перед вами новые возможности.
Я лично использую взломанные игры, чтобы наслаждаться бесконечными возможностями.
Моды для игр дают невероятную
возможность настроить игру, что делает
процесс гораздо интереснее.
Играя с плагинами, я могу персонализировать
свой опыт, что добавляет приключенческий процесс и делает игру более достойной внимания.
Это действительно захватывающе, как такие изменения могут улучшить переживания от игры, а при
этом не нарушая использовать такие игры с изменениями можно без особых неприятных последствий, если быть внимательным и следить за обновлениями.
Это делает каждый игровой
процесс персонализированным, а возможности практически неограниченные.
Советую попробовать такие
игры с модами для Android — это может переведет ваш опыт на новый уровень
tadalafil classification says:
surfgedrag cost of tadalafil cumplete cialis 10mg daily https://buyciaonl.net/ – cialis in manitoba [url=https://buyciaonl.net]cialis over counter at walmart[/url] kakao cialis same as tadalafil
รวมโปรสล็อต pg 50% says:
รวมโปรสล็อต pg 50% เป็นหนึ่งในจุดขายของค่ายเกมนี้ เป็นโปรโมชั่น จากสล็อตเว็บตรง อันดับ1หลายแห่งในไทย และ ต่างประเทศ โดยไม่ผ่านเอเย่นต์ ผู้เล่นจึงมั่นใจได้ในความปลอดภัย และ อัตราการจ่ายที่ยุติธรรม ค่ายเกมนี้ ยังผ่านการตรวจสอบ จากองค์กรเกมระดับโลก ทำให้ผู้เล่นมีความมั่นใจว่า รวมโปรสล็อต pg 50% นี้ เล่นแล้วได้เงินจริง ไม่มีล็อคยูสแน่นอน!
เกมยิงปลา says:
เกมยิงปลา ในวงการออนไลน์ นอกจาก สล็อตออนไลน์แล้ว ยังมี คาสิโนออนไลน์ ที่ได้รับความนิยมในหมู่นักเดิมพันเป็นจำนวนมาก สล็อตเว็บตรง ที่มี รวมเกมยิงปลาทุกค่าย ที่เป็นยอดนิยมอีกด้วย ไม่ได้แค่เพราะความสนุกและความตื่นเต้นในการเล่น ยังเป็นเกมที่มีภาพกราฟิกสวยงามอลังการ และสามารถทำกำไรได้จริง ด้วยฝีมือและกลยุทธ์ที่ดี เหมาะสำหรับทั้งมือใหม่และสายล่าโบนัส
รวมโปรสล็อต50% says:
รวมโปรสล็อต50% เป็นหนึ่งในจุดขายของค่ายเกมนี้ เป็น สล็อตเว็บตรง อันดับ1หลายแห่งในไทย และ ต่างประเทศ โดยไม่ผ่านเอเย่นต์ ผู้เล่นจึงมั่นใจได้ในความปลอดภัย และ อัตราการจ่ายที่ยุติธรรม รวมโปรสล็อต จากเว็บตรงนี้ มีรวมเกมทุกค่าย ที่ผ่านการตรวจสอบ จากองค์กรเกมระดับโลก ทำให้ผู้เล่นมีความมั่นใจว่า เล่นแล้วได้เงินจริง ไม่มีล็อคยูสแน่นอน!
ทดลองเล่นสล็อต says:
ทดลองเล่นสล็อต เว็บตรงไม่ผ่านเอเย่นต์ มีทดลองเล่นสล็อตฟรี เป็นแหล่งรวมตัวเกมส์ สล็อตยอดฮิต แตกหนัก แตกดี ที่สำคัญคือ การเลือกเว็บสล็อตสายตรงไม่ผ่านเเย่นต์ เชื่อถือได้มั่นคงปลอดภัยแน่นอน และ ตัวเกมส์สล็อตยอดฮิต ก็เป็นหนึ่งในตัวเลือกสำหรับนักลงทุนเช่นกัน
ทดลองเล่นสล็อตฟรี says:
ทดลองเล่นสล็อตฟรี ในยุคที่เกมส์สล็อตออนไลน์ มีองค์ประกอบหลายๆอย่าง ที่เป็นตัวทำให้นักลงทุน ตัดสินใจกับการเล่นเกมสล็อตจาก เว็บนี้ มากกว่าที่อื่นๆ การทดลองเล่นสล็อตฟรี ทำให้ผู้เล่นติดใจ และ กลับมาเล่นกับ สล็อตเว็บตรง ที่นี่ ซ้ำ
cantorsassemblyplacement.com says:
dianabol 6 week cycle
References:
10mg dianabol cycle, https://cantorsassemblyplacement.com/members/bodyopera2/activity/8357/,
google analytics alternative says:
Google Analytics Alternative
รวมโปรสล็อต pg 50% says:
รวมโปรสล็อต pg 50% เป็นหนึ่งในจุดขายของค่ายเกมนี้ เป็นโปรโมชั่น จากสล็อตเว็บตรง อันดับ1หลายแห่งในไทย และ ต่างประเทศ โดยไม่ผ่านเอเย่นต์ ผู้เล่นจึงมั่นใจได้ในความปลอดภัย และ อัตราการจ่ายที่ยุติธรรม ค่ายเกมนี้ ยังผ่านการตรวจสอบ จากองค์กรเกมระดับโลก ทำให้ผู้เล่นมีความมั่นใจว่า รวมโปรสล็อต pg 50% นี้ เล่นแล้วได้เงินจริง ไม่มีล็อคยูสแน่นอน!
เกมยิงปลา says:
เกมยิงปลา ในวงการออนไลน์ นอกจาก สล็อตออนไลน์แล้ว ยังมี คาสิโนออนไลน์ ที่ได้รับความนิยมในหมู่นักเดิมพันเป็นจำนวนมาก สล็อตเว็บตรง ที่มี รวมเกมยิงปลาทุกค่าย ที่เป็นยอดนิยมอีกด้วย ไม่ได้แค่เพราะความสนุกและความตื่นเต้นในการเล่น ยังเป็นเกมที่มีภาพกราฟิกสวยงามอลังการ และสามารถทำกำไรได้จริง ด้วยฝีมือและกลยุทธ์ที่ดี เหมาะสำหรับทั้งมือใหม่และสายล่าโบนัส
รวมโปรสล็อต50% says:
รวมโปรสล็อต50% เป็นหนึ่งในจุดขายของค่ายเกมนี้ เป็น สล็อตเว็บตรง อันดับ1หลายแห่งในไทย และ ต่างประเทศ โดยไม่ผ่านเอเย่นต์ ผู้เล่นจึงมั่นใจได้ในความปลอดภัย และ อัตราการจ่ายที่ยุติธรรม รวมโปรสล็อต จากเว็บตรงนี้ มีรวมเกมทุกค่าย ที่ผ่านการตรวจสอบ จากองค์กรเกมระดับโลก ทำให้ผู้เล่นมีความมั่นใจว่า เล่นแล้วได้เงินจริง ไม่มีล็อคยูสแน่นอน!
ทดลองเล่นสล็อต says:
ทดลองเล่นสล็อต เว็บตรงไม่ผ่านเอเย่นต์ มีทดลองเล่นสล็อตฟรี เป็นแหล่งรวมตัวเกมส์ สล็อตยอดฮิต แตกหนัก แตกดี ที่สำคัญคือ การเลือกเว็บสล็อตสายตรงไม่ผ่านเเย่นต์ เชื่อถือได้มั่นคงปลอดภัยแน่นอน และ ตัวเกมส์สล็อตยอดฮิต ก็เป็นหนึ่งในตัวเลือกสำหรับนักลงทุนเช่นกัน
ทดลองเล่นสล็อตฟรี says:
ทดลองเล่นสล็อตฟรี ในยุคที่เกมส์สล็อตออนไลน์ มีองค์ประกอบหลายๆอย่าง ที่เป็นตัวทำให้นักลงทุน ตัดสินใจกับการเล่นเกมสล็อตจาก เว็บนี้ มากกว่าที่อื่นๆ การทดลองเล่นสล็อตฟรี ทำให้ผู้เล่นติดใจ และ กลับมาเล่นกับ สล็อตเว็บตรง ที่นี่ ซ้ำ
order phentermine Online guestbook says:
Kudos, Lots of posts!
Check out my homepage :: https://travelhouseholidays.co.uk/
re-fashion.co.uk says:
Kudos! An abundance of advice.
Also visit my web site; buy testosterone pills online info (https://re-fashion.co.uk/)
BUY PENIS ENLARGEMENT PILLS says:
Volwassen inhoud vinden door betrouwbare adult platforms online te
verkennen. Ontdek betrouwbare porno hubs voor een private ervaring.
my web-site … BUY PENIS ENLARGEMENT PILLS
buy penis enlargement pills says:
Adult web platforms offer a variety of videos
for adult entertainment. Opt for trusted web sources for
a safe experience.
my homepage – buy penis enlargement pills
buy penis enlargement pills says:
Nieuwe xxx sites bieden geavanceerde inhoud voor volwassenen. Kies voor betrouwbare frisse sites voor veilig kijken.
my blog post – buy penis enlargement pills
buy penis enlargement pills says:
Sexual content is widely available on dedicated platforms for mature audiences.
Opt for reliable sources to ensure safety.
Feel free to surf to my website :: buy penis enlargement pills
BUY PENIS ENLARGEMENT PILLS says:
Explicit web platform offers a range of videos for adult entertainment.
Select secure adult sites for a safe experience.
Here is my webpage – BUY PENIS ENLARGEMENT PILLS
BUY PENIS ENLARGEMENT PILLS says:
Fresh adult websites provide cutting-edge content for mature audiences.
Choose secure new hubs for safe viewing.
Also visit my website :: BUY PENIS ENLARGEMENT PILLS
Hondrolife comprare says:
Come evitare problemi articolari con l’aiuto di https://hondrolife.biz/it/
La salute delle nostre articolazioni gioca un ruolo cruciale nella qualità della vita. Troppo spesso, ci troviamo a dover affrontare fastidi, rigidità e limitazioni nel movimento. Fortunatamente, esistono approcci efficaci per preservare il benessere delle nostre zone articolari. Adottando alcune pratiche quotidiane possiamo migliorare notevolmente la situazione.
È importante comprendere che la prevenzione inizia dalle scelte quotidiane. Un’alimentazione equilibrata, ricca di nutrienti fondamentali, è un primo passo significativo. Anche una regolare attività fisica può rivelarsi incredibilmente benefica. Non si tratta solo di esercizi intensivi, ma di mantenerci sempre attivi, anche con semplici passeggiate.
Vivere in modo sano richiede consapevolezza e attenzione. Fortunatamente, ci sono risorse disponibili, in grado di supportarci efficacemente. La costante cura delle articolazioni deve diventare una priorità. Esplorando diverse alternative, potremo scoprire metodi naturali che ci aiuteranno ad affrontare le sfide quotidiane.
In questo contesto, è essenziale informarsi e scegliere prodotti adeguati. In un mondo in continua evoluzione, le opzioni a nostra disposizione si ampliano notevolmente. Affidarsi a soluzioni innovative può portare risultati sorprendenti nel lungo periodo. L’importante è agire con intelligenza e fare scelte informate, per mantenere in salute il nostro organismo.
Strategie per prevenire dolori articolari
Prendersi cura delle proprie articolazioni è fondamentale per mantenere uno stile di vita attivo e sano. Ogni giorno, i nostri corpi si muovono in modi che possono mettere a dura prova le giunture. Molte persone non si rendono conto dei piccoli gesti quotidiani che possono influenzare il benessere delle articolazioni. Semplici abitudini possono fare la differenza nella vita di tutti i giorni.
Una buona alimentazione è essenziale. Mangiare cibi ricchi di nutrienti è un passo importante. Frutta, verdura e pesce grasso forniscono antiossidanti e acidi grassi che favoriscono la salute. Inoltre, non dimenticare di rimanere idratati. L’acqua è vitale per mantenere le articolazioni lubrificate e funzionanti. Ogni sorso ha un impatto positivo sul nostro corpo.
Incoraggiare il movimento regolare è altrettanto cruciale. Camminare, fare yoga o praticare esercizio fisico aiuta a rinforzare i muscoli che sostengono le giunture. Allenamenti a basso impatto sono ottimi per chiunque. Queste attività non solo migliorano la mobilità, ma aiutano anche a mantenere un peso sano. Un peso equilibrato diminuisce lo stress sulle zone articolari.
Ricordare di ascoltare il proprio corpo è altrettanto fondamentale. Se senti dolore o disagio, non ignorarlo; è un segnale che deve essere preso sul serio. Non è mai troppo presto per cominciare ad adottare misure preventive. Ogni piccolo sforzo conta. Prendere coscienza delle proprie abitudini quotidiane è un passo verso una vita senza fastidi.
Infine, considera l’importanza di riposare adeguatamente. Il sonno rigenerante permette al corpo di recuperare. Dormire bene aiuta non solo la mente, ma anche le giunture. Dedicare del tempo al riposo è essenziale per il recupero fisico. Ricorda che la prevenzione è sempre meglio della cura. Investire nella salute oggi porta benefici a lungo termine.
Hondrolife: una soluzione naturale efficace
La ricerca di alternative naturali per il benessere delle giunture è in crescita. Sempre più persone si rivolgono a prodotti che possano offrire un sostegno concreto. In questo contesto, emerge una proposta interessante. Gli ingredienti naturali possono fare la differenza. Non riguarda solo il conforto a breve termine, ma anche il mantenimento della salute nel lungo periodo.
Questo prodotto si distingue per la sua formulazione attenta e mirata. Gli estratti vegetali selezionati sono noti per le loro proprietà benefiche. Con un’assunzione regolare, è possibile notare miglioramenti significativi. Si tratta di un approccio che combina tradizione e scienza. La sinergia tra i vari componenti crea un effetto positivo sul corpo.
Non dimentichiamo l’importanza della costanza. L’utilizzo regolare, infatti, può contribuire a un miglioramento della mobilità. L’azione complessiva può portare a un senso di leggerezza impagabile. I risultati si fanno sentire con il passare del tempo. La gratificazione, quindi, non è immediata, ma ne vale la pena.
Considerare un rimedio naturale è un passo significativo verso il benessere. La scelta di integrare soluzioni come questa nella routine quotidiana può influenzare positivamente lo stato generale della nostra salute. In un mondo sempre più frenetico è fondamentale investire nella propria qualità di vita e, allo stesso tempo, esplorare opzioni che supportano il corpo in modo delicato e naturale.
buy penis enlargement pills says:
Volwassen inhoud streamen op een veilige manier door te kiezen voor geverifieerde adult websites.
Kies voor veilige platforms voor discreet vermaak.
Also visit my website :: buy penis enlargement pills
buy penis enlargement pills says:
Premium pornosites bieden premium inhoud voor volwassenen. Ontdek veilige hubs voor
kwaliteit en privacy.
Here is my website … buy penis enlargement pills
BUY PENIS ENLARGEMENT PILLS says:
Watch adult videos securely on reputable adult platforms.
Find safe streaming hubs for a premium experience.
Look at my website: BUY PENIS ENLARGEMENT PILLS
buy penis enlargement pills says:
Watch adult videos securely on reputable adult platforms.
Find trusted sites for a premium experience.
My website: buy penis enlargement pills
BUY PENIS ENLARGEMENT PILLS says:
Toonaangevende pornosites bieden veilige en premium inhoud voor volwassenen. Ontdek betrouwbare hubs voor een kwaliteitservaring.
Also visit my blog … BUY PENIS ENLARGEMENT PILLS
cashwin bonus code says:
Der Rolletto Casino Willkommensbonus ist ein großzügiges Angebot und umfasst die ersten drei Einzahlungen mit bis zu 6.500 €. Spieler sollten jedoch auf mögliche Angebote wie „No Deposit“-Boni oder Freispiele achten, die oft als Geschenke vom Casino bereitgestellt werden. Von großzügigen Willkommensboni bis hin zu speziellen Angeboten für Krypto-Einzahlungen und regelmäßigen Freebets für Sportfans – die Bonusstruktur von Rolletto Casino hat für jeden Spielertyp etwas dabei. Wenn Sie weitere Optionen erkunden möchten, empfehlen wir Ihnen, auch einen Blick auf unsere anderen Casino Bewertungen zu werfen, um das ideale Casino für Ihre Bedürfnisse zu finden.
Neben einem großzügigen Willkommenspaket, das bis zu 6.500 € für die ersten drei Einzahlungen umfasst, gibt es auch einen separaten ersten Einzahlungsbonus von 150% bis zu 500 €/$ plus 50 Freespins. Im Vergleich zu den besten Online-Casinos bietet Rolletto unglaubliche Bonuswerte in traditionellen Casino-Segmenten, einschließlich Sportwetten, und eine riesige Spielbibliothek von den besten Anbietern. Ja, neue Spieler können einen Willkommensbonus von bis zu 6.500 € für Casino-Spiele, einen 150% Bonus für Sportwetten und einen 100% Bonus bis zu 500 € für eSports in Anspruch nehmen.
References:
https://online-spielhallen.de/1go-casino-aktionscodes-ihr-schlussel-zu-exklusiven-vorteilen/
sofortbonus casino freispiele says:
In der Regel sollte man, ebenfalls per E-Mail oder aber per Rückrufservice, schnell eine Antwort vom Support des Zodiac Casinos erhalten. Das Zodiac Casino bietet auch einen sehr interessanten Service für seine Kunden an. Das Casino bietet nämlich die Casinosoftware zum Download an, sodass man das Zodiac Casino direkt auf dem Computer gespeichert hat und so schnelleren Zugriff auf das Casino bekommt. Diese Zertifizierung bestätigt, dass das Spielen im Zodiac Casino sicher und fair ist. Das bedeutet, dass die Datenübertragung sehr sicher ist und daher die Kundendaten auch sicher im Casino aufbewahrt werden können. Zudem bietet das Zodiac Casino auch diverse Spiele im Bereich vom Video Poker an.
Microgaming bietet eine große Auswahl an Spielautomaten und Tischspielen, während Evolution Gaming hochwertige Live-Dealer-Optionen bereitstellt. Zum Beispiel, wenn Sie den Zodiacbet Casino Bonus Code eingeben, könnten Sie einen verbesserten Einzahlungsbonus erhalten, der Ihnen mehr Spielraum gibt, um Ihre Lieblingsspiele zu genießen. Werfen wir einen genaueren Blick auf das zodiacbet casino und entdecken wir, was diese Plattform so besonders macht. Wenn Sie im Zodiac Casino spielen, können Sie von unseren fantastischen Angeboten Gebrauch machen, die ständig aktualisiert werden, um gewährleisten zu können, dass Sie die bestmöglichen Promotionen erhalten. Darüber hinaus bietet das Casino Links zu externen Ressourcen, die Spielern helfen, verantwortungsvoll zu spielen.
Das Online Casino ist in Curacao lizenziert, was bedeutet, dass es sich hier um einen sicheren und seriösen Anbieter handelt. Ihre Lieblings-Glücksspiele sind kostenlos für Sie. Hallo, ich bin Sophie Fuchs, Redakteurin und Rezensentin bei at.casinohex.at. Mein Ziel ist es, allen Besuchern dieser Webseite die aktuellsten und überprüften Informationenn über das Online Glücksspiel bereit zu stellen, um nur die besten und sichersten Spielerfahrungen zu garantieren. Ich heiße Alexander Loew und bin Glücksspiel-Expert und Chefredakteur bei at.casinohex.at.
References:
https://online-spielhallen.de/willkommen-bei-monro-casino-ihr-einfacher-login/
call girls in islamabad says:
Our Top call girls in islamabad are gorgeous, mindful, new, extravagant, alluring alongside the effortless character. They know the ability of enchantment and would make you fulfilled. You investigate their photos on this site, you will fantasize about them.
call girl in islamabad says:
call girl in islamabad, young Call girl in islamabad, islamabad Call girl, hot Call girl in islamabad, sexy Call girl in islamabad, Call girl service in islamabad. vip Call girl in islamabad, sexy Call girl of islamabad beautiful Call girl in islamabad, independent Call girl in islamabad.
call girls in lahore says:
call girls in lahore could be the most popular business in the city. Our business boss is always looking for new women, both young girls and younger teens. Their bodies are as soft and warm as a baby’s. Independent call girls in lahore in some of the most well-known, and the women who work for these services are known for having strong bodies.
call girl lahore says:
Our lahore call girls offer unexpected and brilliant Call Girl service offers you affordable females so that you can easily book a hot girl for the full night and enjoy with her a lot. Enjoy your precious with our sexy and smoking hot Call Girl girls in lahore and fulfill all your needs. We only have brilliant and high-class females because we always believe in high standards and beautiful girls. Call Girls in Lahore are incredible and very impressive.
Karachi call girl says:
Our Top call girls in Karachi are gorgeous, mindful, new, extravagant, alluring alongside the effortless character. They know the ability of enchantment and would make you fulfilled. You investigate their photos on this site, you will fantasize about them.
call girls Karachi says:
call girls in Karachi could be the most popular business in the city. Our business boss is always looking for new women, both young girls and younger teens. Their bodies are as soft and warm as a baby’s. Independent call girls in Karachi in some of the most well-known, and the women who work for these services are known for having strong bodies.
Ancient Egypt casino says:
It sounds a bit technical, but essentially, it gives you the power to check the game’s integrity yourself, offering a transparent and verifiable layer of trust beyond just the casino’s word. The “Provably Fair” system is a really neat bit of tech for anyone who likes to be absolutely sure the games are on the level. It’s a sign that they are a legitimate business and not just some fly-by-night operation, but players should be aware of where the regulatory power lies. Understanding these elements is key to enjoying your gaming experience with peace of mind, knowing there are safeguards in place and that the games themselves are audited for fairness. 21bit Casino, like any reputable online operator, has laid out its credentials and tools to help you play responsibly. We all want to have a bit of fun at the casino, but ensuring it’s a safe and fair environment is non-negotiable.
Online casino play should be fun and never create financial worries. You can deposit with Bitcoin, Ethereum, and other cryptocurrencies, or use AUD, EUR, and other traditional currencies via card or e-wallet. For Aussies seeking a safe, modern, and rewarding online casino, 21 Bit is a top-tier destination. Players have access to tools for controlling their habits, including deposit limits and self-exclusion options. Players can enjoy 21 Bit mobiles, as the casino works smoothly on both Android and iOS devices.
References:
https://blackcoin.co/cashman-casino-slots-games-comprehensive-guide/
시프로플록사신 구매 says:
생산페수 정신병질인격 전생 피보험자 잡차래 유인행위 에부라 거지뿌래이 고강 사르트족 https://yak-jiu.com/-cipro.html – 문화사회학 출근길 조준기 【속담】 바깥대 관불회 염마예 해산타령 고속도윤전기 외마치질굿
Casino NSW food and drink says:
The first step assumes to get an account at a qualified online casino at which all of your games will be obtainable. If you have got a good knowledge of casinos online Australia, that’s the moment to order the real money type. Due to all of our reviews being unquestionably clear, players will find immediately the things you take and can easily make a commonsense choice on Australian casinos online and if you wish to join under the offered conditions. Those casinos online Australia all of us support are always accessible on cell phones and besides some of them often provoke gamblers to utilize smartphones and tablets granting additional bonuses and exceptional promotions.
Today a lot of gamblers substitute the focus from offline casinos where they waste valuable time and funds to the online casino pages which make it possible for clients to game best casino in Australia whilst sitting at home. Australian casinos online in a number of casino services could see huge success in a smaller term in comparison to the thing that they produced in many years in offline casino. We try to point out all those best online casinos Australia which usually present beneficial welcome gifts but also repeated promotions and real programs for VIP. Every time our group studies the casinos we all compare the most important element that may defines a really good corporation which uncovers Australian casinos online. You can check out the opinions on the well-known online casinos below.
References:
https://blackcoin.co/what-is-the-best-online-casino-and-how-much-have-you-won-before/
Bridge declarer play says:
The table below lets you quickly compare the top 10 Australian online casinos and their key features. Some online casinos even allow you to link your Google or Facebook accounts for faster registration. By following a few simple steps, you can create an online casino account and start enjoying your favorite games. While it is generally safe to play at offshore casino sites, players should choose licensed casinos for safety. Australian players can access international online gambling sites, but they do not benefit from local consumer protection laws. Additionally, Australian players do not need to pay tax on online casino winnings unless they are professional gamblers.
Its mix of top providers and massive bonuses makes it one of the most flexible casinos for both fiat and crypto players in Australia. After weeks of research and real gameplay testing, we’ve narrowed it down to the top casinos in Australia that truly deliver. Everyone wants a reliable online casino in Australia that keeps player data secure and provides fair, transparent bonuses.
References:
https://blackcoin.co/this-is-vegas-casino-review/
maximizing casino comp points says:
Keep your eye on your opponent’s checkers. By securing the points closest to your home board early in the game, you can block your opponent’s path and make it easier for you to start bearing off. Again, the rules for gameplay are the same.
Enjoy features such as real-time chat, player rankings, and customizable game settings. The objective is to move all your checkers into your home board and bear them off before your opponent does the same. Additionally, the game is sometimes played in rounds with a scoring system deciding the eventual winner. The object of the game is to move your pieces along the board’s triangles and off the board before your opponent does. Would you like to play another game with the same players? You are now disconnected, other players won’t see you online and can’t challenge you.
References:
https://blackcoin.co/all-caesars-properties-in-las-vegas-2025-list/
jobs.assist24-7.com says:
paypal casino
References:
https://jobs.assist24-7.com/employer/best-paypal-online-casinos-in-the-us-2025/
taptag.vc says:
paypal casinos
References:
https://www.taptag.vc/twyla202630773
https://2workinoz.com.au/employers/skrill-vs-neteller-our-comparison-which-is-better-find-out-below/?-find-out-below_/ says:
paypal online casinos
References:
https://2workinoz.com.au/employers/skrill-vs-neteller-our-comparison-which-is-better-find-out-below/?-find-out-below_%2F
spandexjobs.com says:
usa casino online paypal
References:
https://spandexjobs.com/employer/online-slot-sites-that-accept-paypal-in-january-2026/
joblinksolution.org says:
online blackjack paypal
References:
https://joblinksolution.org/employer/top-online-casinos-for-real-money/
https://realestate.kctech.com.np/profile/clint83r988583 says:
casino online paypal
References:
https://realestate.kctech.com.np/profile/clint83r988583
bet go says:
I loved as much as you’ll receive carried out right here.
The sketch is attractive, your authored subject matter stylish.
nonetheless, you command get got an edginess over that you wish be delivering the following.
unwell unquestionably come further formerly again since exactly the same nearly a lot often inside case you
shield this hike.
Call Girls near me says:
Do you want to find real call girls in Islamabad? You have found the right place, so don’t look any further. We are the best agency for helping you find the best call girls in Islamabad.
Best Lahore Call Girls says:
Try something new with our beautiful Russian and international call girls in Lahore. These stunning women are known for their tasty personalities and stunning looks. Our call girls come from different parts of Pakistan.
Collage Karachi Call Girls says:
You can find a wide range of Karachi Call Girls on CallGirlsatKarachi, so you can find one that fits your needs. There are pictures of college girls, Desi Bhabhi, air hostesses, working women, and many more on CallGirlsatKarachi.
Islamabad Call Girl says:
Our Islamabad Call Girls agency offers a variety of services, such as GFE, 69, Hardcore & Deep Sex, Body Massage, Blow Job, Hand Job, Roleplay, Foreplay, Threesome, BDSM, Come in Mouth, Incall & Outcall services, and a variety of social or lifestyle interactions that are tailored to each client’s needs.
Watch Shemale Hentai Videos says:
Порносайт предлагает широкий выбор видео для взрослых развлечений.
Выбирайте безопасные сайты для взрослых для конфиденциального опыта.
Feel free to visit my site Watch Shemale Hentai Videos
buy penis enlargement pills says:
Premium adult platforms bieden veilige en premium inhoud voor volwassenen. Ontdek veilige sites voor een kwaliteitservaring.
Take a look at my blog post … buy penis enlargement pills
buy valium online says:
Explicit content sites offer a variety of videos for
adult entertainment. Opt for reliable platforms for a safe experience.
My web blog: buy valium online
intelligencerinstitute.org says:
parx casino
References:
https://intelligencerinstitute.org/index.php/component/k2/item/6-you-only-live-once-live-well
https://blogfreely.net says:
illegal anabolic steroids before and after
References:
https://blogfreely.net/sharkshield76/1-hormone-de-croissance-humaine-hgh-fournisseur
https://rentry.co/xzqwyohm says:
extreme muscle building supplements
References:
https://rentry.co/xzqwyohm
chatawaytours.com says:
casino mississippi
References:
https://chatawaytours.com/st_tour/kemenuh-butterlfy-park-fly-with-butterfly/
ezproxy.cityu.edu.hk says:
pros of steroids|acybgnsldb7ntt-2f2ti0zixirb_om1nyq:***
References:
http://ezproxy.cityu.edu.hk/login?url=https://ecro.fr/images/pgs/?achat_hormone_de_croissance.html
https://clutchgrape16.bravejournal.net/ says:
best non hormonal muscle builder
References:
https://clutchgrape16.bravejournal.net/achetez-pro-hormone-de-croissance-en-ligne-hgh-sur-hsn
autoescolaeduardo.com says:
mount airy casino
References:
https://autoescolaeduardo.com/producto/charging-cable/
BUY VALIUM ONLINE says:
Frisse adult websites bieden geavanceerde inhoud voor volwassenen.
Kies voor betrouwbare frisse sites voor veilig kijken.
Check out my web-site … BUY VALIUM ONLINE
BUY VALIUM ONLINE says:
Best xxx sites provide premium content for mature audiences.
Explore secure hubs for quality and privacy.
My web-site: BUY VALIUM ONLINE
BUY PENIS ENLARGEMENT PILLS says:
Expliciet materiaal bekijken op een veilige manier door
te kiezen voor geverifieerde adult websites. Kies voor veilige platforms voor
discreet vermaak.
my webpage; BUY PENIS ENLARGEMENT PILLS
assaintpriest.fr says:
3 rivers casino
References:
https://assaintpriest.fr/2023/07/04/kenny-oun-sest-engage-en-faveur-de-lassp/
www.dailymunwha.com says:
References:
Silverstar casino spa
References:
https://www.dailymunwha.com/economy/?bmode=view&idx=20659488
Call Girls in Lahore says:
I really like reading an article that can make people think. Also, thanks for allowing for me to comment!
ideasparaviajar.com says:
pockie ninja
References:
https://ideasparaviajar.com/precio-entrada-museo-de-israel
https://healthkart.com.au says:
References:
Casino 45
References:
https://healthkart.com.au/fitness-fact-benefits-of-running-why-you-should-start-jogging/
buy penis enlargement pills says:
Inhoud voor volwassenen kunnen worden gestreamd op betrouwbare platforms voor privacy.
Ontdek veilige websites voor kwaliteitsweergave.
my blog post … buy penis enlargement pills
buy penis enlargement pills says:
Watch adult videos securely on reputable adult platforms.
Find trusted sites for a premium experience.
My site; buy penis enlargement pills
buy valium online says:
Top adult websites bieden hoogwaardige inhoud voor volwassen entertainment.
Kies voor gegarandeerde platforms voor een veilige en plezierige ervaring.
my web-site; buy valium online
BUY VALIUM ONLINE says:
Adult content site offers a range of videos for adult entertainment.
Select trusted porn hubs for a safe experience.
My website; BUY VALIUM ONLINE
หีใหม่.net says:
I have read so many articles or reviews regarding the blogger lovers but this piece of writing is truly a fastidious piece of writing, keep it up.
www.udrpsearch.com says:
testosterone injections for muscle building
References:
https://www.udrpsearch.com/user/bufferrouter5
https://www.udrpsearch.com/ says:
what are steroids side effects
References:
https://www.udrpsearch.com/user/dimechief7
https://mes-favoris.top/item/606956 says:
dianabol pills side effects
References:
https://mes-favoris.top/item/606956
cma-gestion.chantycp.fr says:
References:
Hollywood casino st louis mo
References:
https://todoespolitica.com.mx/participan-100-elementos-de-operaciones-especiales-de-la-sspe-en-curso-armamentistico/
https://oajuricaba.com.br says:
References:
Did arnold schwarzenegger do steroids
References:
http://fizmatdienas.lv/2014/galerijas/39/42
graph.org says:
References:
Little river casino
References:
https://graph.org/Lucky-Green-Casino-Best-Slots–Bonuses-04-20
https://edgewater-casino-resort-laughlin.online-spielhallen.de says:
References:
Majestic star casino
References:
https://casino-online-razor-shark.online-spielhallen.de/
lucky-lil-s-casino.online-spielhallen.de says:
References:
Online roulette play roulette and receive $1500
References:
https://bitspin-casino.online-spielhallen.de/
Wolfsburg says:
References:
Saarbrücken
References:
https://bruchsal-casino.online-spielhallen.de/
Bielefeld says:
References:
Erfurt
References:
https://golden-lady-casino-login.online-spielhallen.de/
Erlangen says:
References:
Osnabrück
References:
https://beste-online-casino-2025.online-spielhallen.de/
Kassel says:
References:
Würzburg
References:
https://crownplay-casino.online-spielhallen.de/
https://graph.org/Rocket-Casino-App-04-27 says:
References:
Cambodia casino
References:
https://graph.org/Australia-Online-Poker-App-04-27
graph.org says:
References:
Best online betting sites
References:
https://graph.org/Do-You-Need-Id-For-Crown-Casino-Perth-04-27
icmimarlikdergisi.com says:
References:
Holland casino vacatures https://icmimarlikdergisi.com/kariyer/companies/mega-moolah-progressive-jackpot-biggest-wins-and-how-to-play/
https://zurimeet.com/ says:
References:
Casino sanremo online https://zurimeet.com/@virgilmarrufo2
https://disaster.acire23network.com/author/drlbrodie64776/ says:
We explicitly needed a full-service production company in Italy to manage the entire project pipeline from end to end.
https://landfinderx.com/author/nancyluker0248/
https://ambassador-kk.com/vzlet-i-drayv-melbet-v-2026-mezhdunarodnyy-obzor-ot-soccerland-ru/ says:
Мобильное приложение работает без вылетов, интерфейс
подгружается плавно даже во время плотного
субботнего лайва.
https://ambassador-kk.com/vzlet-i-drayv-melbet-v-2026-mezhdunarodnyy-obzor-ot-soccerland-ru/
https://kuuldeepsharma.com/kubok-konfederacij-futbolnyy-festival-s-azartom-ot-melbet/ says:
Большой выбор платежных методов для
ввода и вывода средств, каждый найдет
для себя удобный вариант.
https://kuuldeepsharma.com/kubok-konfederacij-futbolnyy-festival-s-azartom-ot-melbet/
https://gefestled.ru/wp-content/pgs/sapfirovye_breket_sistemy_estetika_ortodonticheskogo_lecheniya_i_svoystva_materiala.html says:
Для меня это оптимальный букмекер по скорости работы
платформы и величине предлагаемых котировок.
https://gefestled.ru/wp-content/pgs/sapfirovye_breket_sistemy_estetika_ortodonticheskogo_lecheniya_i_svoystva_materiala.html
http://crimea-kvn.ru/images/pgs/kak-poimat-udachu-zakhvatyvayushchiy-obzor-melbet-stavok-na-sport-v-2026-godu.html says:
Периодически участвую в локальных турнирах на сайте, призы за призовые места вполне реальные.
http://crimea-kvn.ru/images/pgs/kak-poimat-udachu-zakhvatyvayushchiy-obzor-melbet-stavok-na-sport-v-2026-godu.html
http://vtei.edu.ua/media/pgs/taynye-tropy-melbet-gde-iskat-rabochee-zerkalo-v-2026-godu.html says:
Дизайн сайта в темных тонах приятен для глаз,
особенно когда сидишь за аналитикой поздно ночью.
http://vtei.edu.ua/media/pgs/taynye-tropy-melbet-gde-iskat-rabochee-zerkalo-v-2026-godu.html
https://kluge-koepfe-krefeld.de/employer/vistorfilm/ says:
Ищете проверенную беттинг-платформу с оперативным расчетом ставок и круглосуточной поддержкой пользователей? На Мелбет вас ждут сотни ежедневных событий из мира традиционного спорта и киберспортивных дисциплин с вариативными тоталами. Устанавливайте приложение на мобильное устройство, следите за ходом игры по детальной инфографике и заключайте пари в один клик.
https://www.stadtshopper.de/celestegainey3
https://git.dev.maimaiag.com/bessfrost38781 says:
БК Melbet предоставляет качественные условия для любителей спортивного прогнозирования, включая подробную роспись на статистические показатели команд. Пополняйте счет через современные платежные системы, ловите выгодные котировки в Live-режиме и выводите честно выигранные средства в минимальные сроки. Используйте функционал мобильного софта для постоянного контроля своих открытых купонов.
http://classified.ondemandbiz.com/profile/patrickstow384
https://vi.nhacdj.com.vn/ytwgrazyna2798 says:
БК Melbet предоставляет качественные условия для любителей спортивного прогнозирования, включая подробную роспись на статистические показатели команд. Пополняйте счет через современные платежные системы, ловите выгодные котировки в Live-режиме и выводите честно выигранные средства в минимальные сроки. Используйте функционал мобильного софта для постоянного контроля своих открытых купонов.
https://mytimeangels.com/author-profile/rufusbrownless/
https://git.nizart.me/winifredwunder says:
Официальный сайт Мелбет открывает доступ к масштабной спортивной линии с повышенными коэффициентами на европейский футбол и мировые теннисные турниры. Зарегистрируйте игровой профиль, пройдите верификацию удобным способом и управляйте балансом без дополнительных комиссий со стороны платформы. Активируйте доступные приветственные предложения и отслеживайте результаты матчей в режиме реального времени.
https://git.scinalytics.com/eddiet45018076/eddie1993/wiki/melbet
https://nam.ovh/QYMBH says:
Официальный сайт Мелбет открывает доступ к масштабной спортивной линии с повышенными коэффициентами на европейский футбол и мировые теннисные турниры. Зарегистрируйте игровой профиль, пройдите верификацию удобным способом и управляйте балансом без дополнительных комиссий со стороны платформы. Активируйте доступные приветственные предложения и отслеживайте результаты матчей в режиме реального времени.
https://stackcloud.site/efrainstamper3
Extra resources says:
Very nice post. I just stumbled upon your blog and wanted to say
that I’ve truly enjoyed surfing around your blog posts. After all I will
be subscribing to your feed and I hope you write again very soon!
my website says:
Remarkable! Its in fact awesome post, I have got much clear idea on the topic of from this
article.
https://giaovienvietnam.vn/employer/czego-szukasz/ says:
БК Мелбет предлагает отличные условия для крупных ставок, лимиты не режут.
https://cleveran.com/profile/frederickdeber
https://freeads.sg/profile/wallacebenavid says:
Платформа адаптирована под мобильный трафик, ничего не виснет.
Also visit my blog post :: https://megasite.link/twila723632323
check my reference says:
Very good article! We are linking to this particularly great content
on our website. Keep up the good writing.
Перевод и легализация диплома гражданина Шри-Ланки says:
Ищете надежное бюро переводов Москва для быстрой легализации личных свидетельств и коммерческих контрактов? Наш центр предоставляет качественные услуги бюро переводов, выполняя нотариально заверенный перевод паспортов, справок и учредительных документов. Мы помогаем пройти все этапы консульской легализации и оперативно поставить апостиль на оригиналы или нотариальные копии для использования в любой стране мира.
https://translation-center.ru/perevod-i-legalizacziya-diploma-grazhdanina-shri-lanki/
https://maigrir34.fr/ says:
La plateforme officielle spin bara propose un catalogue complet de jeux de hasard accessibles sur ordinateur et via la spinbara app dédiée. Le processus de spinbara registrierung (https://maigrir34.fr/) prend moins de deux minutes pour ouvrir les portes d’un espace sécurisé avec des bonus attractifs. Profitez d’une expérience fluide grâce à la spinbara application mobile conçue pour optimiser vos sessions de jeu au quotidien.
Расторжение брачного договора says:
Справочный портал Notarmsk.ru разработан для оперативного поиска нотариальных услуг и получения юридической помощи в Москве рядом с домом или офисом. Сайт предоставляет доступ к консультациям профильных юристов по жилищным спорам, приватизации земли и трудовым конфликтам. Квалифицированные адвокаты гарантируют полную конфиденциальность, профессиональный анализ документов и надежное представительство во всех государственных инстанциях.
https://notarmsk.ru/rastorzhenie-brachnogo-dogovora-6/
https://comparebeauty.nl/ says:
Op zoek naar een betrouwbaar online casino met snelle stortingen en unieke bonussen? LegionBet combineert de nieuwste videoslots met live casino actie van echte dealers. Meld je aan bij Legion Bet Casino en start direct met spelen.
https://comparebeauty.nl/
трип скан says:
Greetings from Ohio! I’m bored at work so I decided to browse your
website on my iphone during lunch break. I love
the info you provide here and can’t wait to
take a look when I get home. I’m amazed at how fast your blog loaded on my
phone .. I’m not even using WIFI, just 3G ..
Anyways, excellent blog!
полимаркет says:
I visited several blogs except the audio quality for audio songs present at this
web site is actually excellent.
https://storexxestates.com/author/jamilaforet66/ says:
Die Tischspiele bieten eine tolle Abwechslung zu den klassischen Spielautomaten.
https://git.lamby.gay/olai5155652400
https://clipmy.link/BqOKs says:
Die Kombination aus Sportwetten und Spielautomaten auf einer Plattform ist genial.
https://spaceicon.com.ng/author/bernardocounci/
https://lookmyproperty.com/author/rocky45140387/ says:
Nutze die Freispiele am liebsten direkt nach der Aktivierung für neue Spielautomaten.
https://link.peds.to/noralibby0470
https://code.paperxp.com/masonpaling471 says:
Spiele hier fast täglich die Tischspiele im Live Casino und hatte noch nie Probleme.
https://sarahjoanthailand.com/author/katiemetzler55/
borrow money against my car for repair says:
We have been helping Canadians Get a Loan Against Their Vehicle for Repairs
Since March 2009 and are among the very few Completely Online Lenders In Canada.
With us you can obtain a Car Repair Loan Online from anywhere in Canada as long as you have a Fully
Paid Off Vehicle that is 8 Years old or newer. We look forward
to meeting all your financial needs.
đánh bài đổi thưởng says:
Game Bài Đổi Thưởng – Top 20+ Game Đánh Bài
Ăn Tiền Uy Tín 2026
bc game bonus says:
Having read this I thought it was very enlightening.
I appreciate you finding the time and energy to put this content together.
I once again find myself spending a lot of time both reading and
leaving comments. But so what, it was still worth it!
https://2whois.Ru says:
There is definately a great deal to know about this subject.
I like all of the points you’ve made.
car repair loan online says:
We have been helping Canadians Get a Loan Against Their Vehicle for Repairs Since March 2009
and are among the very few Completely Online Lenders In Canada.
With us you can obtain a Car Repair Loan Online from anywhere in Canada as
long as you have a Fully Paid Off Vehicle that is 8 Years old or newer.
We look forward to meeting all your financial needs.
betfury dice says:
Great weblog here! Also your site rather a lot
up very fast! What web host are you using? Can I am getting your associate hyperlink in your host?
I wish my website loaded up as fast as yours lol
best offline translation earbuds 2026 says:
My developer is trying to convince me to move to
.net from PHP. I have always disliked the idea
because of the costs. But he’s tryiong none the less.
I’ve been using Movable-type on several websites for
about a year and am worried about switching to another platform.
I have heard good things about blogengine.net.
Is there a way I can import all my wordpress content into it?
Any help would be greatly appreciated!
https://srsbkn.eu.org/tessajenson989 says:
Hämtade min casinobonus utan problem.
https://sellyourhomeindallas.com/author-profile/martymenzies6/
трипскан сайт says:
Hello, i believe that i noticed you visited my web site thus i got here to return the choose?.I
am attempting to in finding issues to enhance my site!I
assume its adequate to make use of some
of your concepts!!
трипскан сайт says:
Post writing is also a fun, if you be acquainted with then you
can write if not it is complicated to write.
полимаркет официальный says:
I’ve been exploring for a little for any high-quality articles or weblog posts in this kind of house .
Exploring in Yahoo I finally stumbled upon this site. Reading this info So i’m glad to show that I have a very just right
uncanny feeling I found out exactly what I needed. I so much indisputably will make certain to don?t forget
this website and provides it a look regularly.
https://profmustafa.com/@temekahowchin?page=about says:
A melhor plataforma de apostas que usei nos últimos meses.
https://gitea.wsszn.com/vcpbenny73106
https://shopcrystalsandgemstones.com/author/jocelynherrell/ says:
Recomendo essa plataforma de apostas para todos os meus amigos.
https://atpo.ca/employer/br/
https://gbewaaplay.com/jqaveronique91 says:
Dá para ganhar dinheiro online de verdade se tiver uma boa estratégia.
https://git.k0ki-dev.com/otisgonsalves1
http://newchanpin.yuntangkeji.cn:33009/ednabrigham514/edna1999/wiki/cassino-online says:
Amei os gráficos desse fortune tiger brasil, muito fluido.
https://homeablazebyhispresence.dennmachinery.com/@jimmie22756396?page=about
https://gitea.zachl.tech/susannepuglies/8801455/wiki/cassino-online says:
O fortune tiger brasil da 5win é o que mais solta bônus.
https://casthub.jp/@sidneyhendrick?page=about
Возврат электронных билетов в Мариинский театр says:
Отличная юридическая консультация Пермь нотариус помогла разобраться https://notar59.ru/vozvrat-elektronnyh-biletov-v-mariinskij-teatr/ договоре.
Купить машину без регистрации: риски и как обезопасить себя says:
Где найти нотарhttps://notarinfo.ru/kupit-mashinu-bez-registraczii-riski-i-kak-obezopasit-sebya/усы Пермь адреса телефоны на одной карте?
Трудовой договор с юристом says:
Какая https://notary-krasnopeeva.ru/trudovoj-dogovor-s-yuristom-2/ейчас реальная стоимость услуг нотариуса Пермь 2026 на доверенность?
Роль юриста в защите прав работников и работодателей says:
Подскажите график работы нотариусов Пермь https://notariusbryukhanova.ru/rol-yurista-v-zashhite-prav-rabotnikov-i-rabotodatelej/ майские праздники.
Этика процессуальной деятельности юриста в уголовном процессе says:
Какая стоимость услуг нотариуса Пермь 2026 устаноhttps://notarquestion.ru/etika-proczessualnoj-deyatelnosti-yurista-v-ugolovnom-proczesse/лена на заверение контрактов?
Сетки антикошка Молжаниновский: Обзор и особенности применения says:
Советую купить москитную сетку на балкон здесь, подошла идеально, комары больше не залетают.
Look into my web-site :: https://aqvamed.ru/setki-antikoshka-molzhaninovskij-obzor-i-osobennosti-primeneniya/
بهترین سایت های پوکر آنلاین با دیلر حرف های says:
در جمعبندی کلی
برای افرادی که
بازیهای شرطی
دنبالشن
این مجموعه
میتونه یکی از گزینهها باشه
مناسب کاربران باشه
قابل توجهه که
نامهایی مثل
enfejаronline خوب
و
sibbet محبوب
در این فضا تاثیرگذار هستن
در پایان کار
قابل استفاده بود
و
به زودی
میام دوباره
Here iis my web blog … بهترین سایت های پوکر آنلاین با دیلر حرف های
okfun says:
Okfun Số 1 Việt Nam 2026 – Cổng Game Giải Trí Hấp Dẫn Tặng 88K
راهنمای کامل کاربران برای بازی انفجار آنلاین says:
یکی از دوستام به اسم نیما قبلاً درباره این موضوع سوال میکرد و من هم از
همون موقع کنجکاو شدم. درود به
همه، چون چند وقتیه درباره این فضا کنجکاو شدم گفتم اینجا
هم نظرم رو ثبت کنم. مدتی قبل وقتی میخواستم قبل از هر تصمیمی
اطلاعات بیشتری داشته باشم با این وبسایت آشنا شدم.
در نگاه اول حس کردم برای آشناییاولیه میتونه مفید باشه.
راستش برای من مهمه که در این حوزه نباید عجله کرد.
یکی از دوستام به اسم کیوان بیشتر از همه روی امنیت و قابل فهم بودن
توضیحات حساس بود. به همین خاطر چند بخش رو با حوصلهتر خوندم.
برداشت من این بود که میشد راحتتر موضوع رو فهمید.
از طرفی در چنین موضوعاتی احتیاط
از همه چیز مهمتره. برای کسانی که دنبال مقایسه بین سایتهای مختلف هستن، میتونه برای آشنایی اولیه مفید باشه.
در کنار این موضوع برندهایی مثل وبسایت
enfejarоnline یا sibbet شناختهشده نمونههایی
هستن که باعث میشن آدم بیشتر دنبال بررسی و مقایسه بره.
یکی از آشناهای من بیشتر دنبال پیشبینی ورزشی بود و همیشه میگفت اگر سایتی توضیحات ساده و روشن نداشته باشه، بهتره آدم با احتیاط بیشتری
جلو بره. در یک نگاه کلی حداقل برای
آشنایی اولیه میتونه مفید باشه.
منپیشنهاد میکنم صرفاً بر اساس تبلیغ تصمیم نگیره.
به نظرم برای کسی که تازه میخواد با فضای شرط بندی یا بازی انفجار آشنا بشه، این مدل صفحات میتونن نقطه شروع بررسی باشن، نه تصمیم نهایی.
my web-site – راهنمای کامل کاربران برای بازی انفجار آنلاین
https://mssq.me/leopoldokl says:
Цветочный салон Цветаева предлагает заказать авторские букеты и композиции в шляпных коробках в Томске. Действует бесплатная доставка по городу при сумме заказа от 2500 рублей.
https://futuremanager.nl/employer/cvetaevatomsk/
پوکر آنلاین و نام کاربری ZeeJustin says:
به نظرم در موضوعاتی مثل شرط بندی و
بازیهای پولی، اولین اصل احتیاطه و بعد بررسی دقیق.
درود، چون چند وقتیه درباره این فضا
کنجکاو شدم گفتم اینجا هم
نظرم رو ثبت کنم. مدتی قبل وقتی دنبال مقایسه چند
سایت بودم این سایت رو بررسی
کردم. همون ابتدا ظاهر ساده اماقابل استفادهای داشت.
راستش برای من مهمه که کاربر باید خودش با دقت بررسیکنه.
یکی از همکارام میخواست بدونه کدوم سایتها اطلاعات شفافتری دارن.
برای همین من هم با دقت بیشتری بررسی کردم.
از نظر من نکته مثبتش این بود که حداقل برای شروع بررسی، اطلاعات
اولیه خوبی میداد. البته نباید فقط با یک کامنت نتیجهگیری کرد.
برای اون دسته از کاربرها که میخوان قبل از تصمیمگیری دید بهتری داشته باشن، بهتره در کنار چند گزینه دیگه بررسی بشه.
وقتیاین حوزه رو نگاه میکنی سایتهایی مثل enfejаronline.net همراه با
پلتفرم sibbet برای خیلیها
تبدیل به اسمهای آشنا شدن.
یکی از بچهها که اسمش نیما بود، میگفت مشکل خیلی از سایتها اینهکه
فقط شعار میدن ولی توضیح درست
نمیدن؛ برای همین من هم بیشتر به متنها دقت کردم.
به طور کلی تجربه بررسی این سایت برای
من مثبت بود. به نظرم بهتره
هم تجربه بقیه رو بخونه و هم خودش بررسی کنه.
در پایان، برداشت من اینه که
این سایت برای بررسی اولیه میتونه مفید باشه، ولی تصمیم نهایی
همیشه باید با تحقیق شخصی و مقایسه چند
گزینه گرفته بشه.
Take a look at my blog – پوکر آنلاین و نام کاربری ZeeJustin
https://ubicapc.com/author/sharynfreed452/ says:
В интернет-магазине Цветаева можно недорого купить розы, альстромерии, эустомы и гипсофилу с доставкой по Томску. К каждому заказу дарим открытку и средство для продления жизни цветов.
https://app.gitpasha.com/joesphholcomb
NK88 says:
NK88 – Nhà Cái Uy Tín Với Kho Gameplay Đỉnh Cao Năm 2026
kazino oyna says:
Ən yaxşı kazino online təcrübəsini yaşamaq üçün sistemimizə qoşulun. Onlayn kazino azerbaycan istifadəçilərinə xüsusi aksiyalar, cekpotlar və təhlükəsiz kazino oynamaq imkanı təklif edir rəsmi 1xbet casino online tərəfdaşlığı ilə. Kazino oyunu seçin və dərhal qazanmağa başlayın!
Feel free to visit my website – https://kazino-1xbet-az.com/
سوالات متداول (FAQ) says:
در جمعبندی نهایی
برای اون دسته که
بازیهای کازینویی
میخوان تست کنن
این سیستم آنلاین
کاملا میتونه
ارزش امتحان داشته باشه
جالبه که
سایتهایی مثل
enfejarߋnline حرفهای
و
sibbet رسمی
در این فضا تاثیرگذار هستن
در پایان
برام جالب بود
و
بدون شک
دوباره سراغش میام
Fееl fгee to surf to my bloіg post … سوالات متداول (FAQ)
Noelia says:
درود فراوان، من مدتی قبل وسط وبگردی در اینترنت به این سایت رسیدم و صادقانه
خیلی خوشم اومد. اطلاعاتش کاربردی بود و
کمتر همچین وبسایتی ببینم. احساس میکنم برای کاربرای زیادی کاربردی باشه.
برای کسایی که دنبال اطلاعات کامل هستن حتما سر بزنن.
به طور کلی تجربه خوبی بود و قطعا بازدیدش میکنم
در مجموع
برای اون دسته که
گیمهای پولی
دنبالشن
این سیستم آنلاین
میتونه تبدیل بشه
انتخاب مناسبی باشه
جالبه که
وبسایتهایی مثل
دامنه enfеjaronline
و
sibbet.com
جایگاه خوبی دارن
در پایان کار
مناسب بود
و
در آینده نزدیک
میام بررسیش کنم
.
Also visit my page – اعتیاد به قمار و
قوانین مربوطه در ایران (Noelia)
Lindsey says:
سلام و عرض ادب، بنده مدتی قبل هنگام گشتن در فضای وب با این وبسایت
آشنا شدم و بدون اغراق نظرم رو جلب کرد.
محتواش کاربردی بود و کمتر همچینوبسایتی پیدا
کنم. به نظرم برای کاربرای زیادی مفید باشه.
اگر به دنبال یه سایت خوب هستن بد نیست برن ببینن.
به طور کلی راضیکننده بود و احتمالا دوباره
استفاده میکنم
در کلقضیه
برای کاربرانی که دنبال تجربه هستن
بازیهای جایزهدار
میخوان تست کنن
این آدرس اینترنتی
مطمئناً میتونه
ارزش بررسی داشته باشه
از سوی دیگر
مجموعههایی مثل
enfejaronline اصلی
و
ѕibbet معتبر
محبوبیت دارن
در پایان کار
دلنشین بود
و
بدون تردید
میام بررسیش کنم
.
Feel freе to visit my page: فعالیت در یوتیوب
(Lindsey)
https://uu88.porn/ says:
UU88 ⭐️ Trang Chủ UU88.Com TOP 1 Việt Nam | ĐK
UU 88 +88K
https://socolive.black/ says:
Socolive là điểm đến lý tưởng dành cho những người yêu thích cá cược
bóng đá và thể thao. Với nền tảng hiện đại và
uy tín hàng đầu, Socolive mang đến trải nghiệm cá cược
trực tiếp cùng link bóng đá chất lượng, giúp người chơi dễ dàng theo
dõi và đặt cược chính xác hơn.
xem ngay sex nhật bản 2025 says:
Hi there just wanted to give you a quick heads up. The words in your article seem
to be running off the screen in Firefox. I’m not sure
if this is a formatting issue or something to do with internet browser compatibility but I figured
I’d post to let you know. The design look great though! Hope you get
the problem resolved soon. Kudos
loan against my car for repair says:
We have been helping Canadians Get a Loan Against Their Vehicle for Repairs Since March 2009 and are among the very few Completely Online Lenders In Canada.
With us you can obtain a Car Repair Loan Online from anywhere in Canada as long as
you have a Fully Paid Off Vehicle that is 8 Years old or
newer. We look forward to meeting all your financial needs.
Bertha says:
ข้อมูลชุดนี้ มีประโยชน์มาก ค่ะ
ดิฉัน ไปเจอรายละเอียดของ เรื่องที่เกี่ยวข้อง
ซึ่งอยู่ที่ Bertha
สำหรับใครกำลังหาเนื้อหาแบบนี้
มีการยกตัวอย่างที่เข้าใจง่าย
ขอบคุณที่แชร์ เนื้อหาดีๆ นี้
และหวังว่าจะได้เห็นโพสต์แนวนี้อีก
تفاوت با «Irish Poker Drinking Game» (بازی نوشیدنی) says:
به نظرم در موضوعاتی مثل شرط بندی و بازیهای پولی،
اولین اصل احتیاطه و بعد بررسی دقیق.
سلام و احترام، من معمولاً اهل کامنت گذاشتن نیستم.
چند شب پیش وقتی میخواستم قبل از هر تصمیمی اطلاعات
بیشتری داشته باشم با این وبسایت آشنا شدم.
بعد از چند دقیقه بررسی
ظاهر ساده اما قابل استفادهای
داشت. به نظرم نباید فقط به
ظاهر سایت اعتماد کرد. یکی از دوستام به اسم حامد میخواست بدونه کدوم سایتها اطلاعات شفافتری دارن.
همین باعث شد من هم دقیقتر
نگاه کنم. چیزی کهبرای من
جالب بود که چند بخشش برای مقایسه مفید
بود. طبیعتاًاین به معنی تأیید کامل
نیست. برای کسایی که میخوان درباره بازی انفجار بیشتر بدونن، میتونه نقطه شروع بدی نباشه.
گاهی هم برندهایی مثل وبسایت enfejarߋnline همراه با sibbet آنلاین در بین بعضی کاربران شناختهتر
شدن. یکی از آشناهای من بیشتر دنبال پیشبینی ورزشی بود و همیشه میگفت اگر سایتی توضیحات ساده و روشن نداشته باشه، بهتره آدم
با احتیاط بیشتری جلو بره.
در مجموع حس بدی ازش نگرفتم.
فکر میکنم منطقیتره با دقت
همه بخشها رو ببینه. به نظرم برای کسی که تازه میخواد با فضای شرط بندی یا بازی انفجار آشنا بشه، این مدل صفحات میتونن نقطه شروع
بررسی باشن، نه تصمیم نهایی.
my ƅlog: تفاوت با «Irish Poker Drinking Game» (بازی نوشیدنی)
mgmarket 6 at says:
Amazing issues here. I am very happy to see your post.
Thank you a lot and I’m looking forward to contact you.
Will you kindly drop me a mail?
Jonathon says:
در پایان کار
برای کاربران علاقهمند به
بازی انفجار
کار میکنن
این پلتفرم
احتمالا گزینه باشه
قابل توجه باشه
جالبه که
سایتهایی مثل
enfejaronline
و
sibbet.com
پیشرفت قابل توجهی داشتن
در پایان
ارزش داشت
و
بیتردید
برمیگردم بهش
Aⅼso visit mү homepage: سبک بازی مایک ماتوسو [Jonathon]
تحلیل تخصصی بخش پیشبینی ورزشی says:
یکی از دوستام به اسم علی قبلاً درباره این موضوع سوال میکرد و
من هم از همون موقع کنجکاو شدم.
درود، معمولاً فقط وقتی چیزی برام جالب باشه نظر میدم.
چند وقت پیش وقتی یکی از دوستام درباره کازینو
اینترنتی حرف میزد چند بخش این
سایت رو نگاه کردم. در نگاه اول
به نظرم نسبتاً مرتب بود. از نظر من بهتره آدم چند
منبع مختلف رو هم ببینه. یکی از
دوستام به اسم نیما میخواست
بدونه کدوم سایتها اطلاعات شفافتری دارن.
همین موضوع باعث شد فقط سطحی رد نشم.
یکی از بخشهایی که بد نبود که متنها خیلی خشک و تبلیغاتی نبودن.
ولی خب این به معنی تأیید کامل نیست.
برای افرادی که قصد دارن قبل از شروع اطلاعات بیشتری داشته باشن دنبال مقایسه
بین سایتهای مختلف هستن، ارزش یک نگاه دقیقتر رو داره.
از طرف دیگه اسمهایی مثل
پلتفرم еnfejaronline یا sibbet.com در بین بعضی کاربران شناختهتر شدن.
یکی از رفیقام که قبلاً چند سایتمشابه رو بررسی کرده بود، همیشه روی این موضوع تأکید
داشت که کاربر باید قبل از هر کاری چند گزینه رو با
هم مقایسه کنه. به طور کلی حداقل برای آشنایی اولیه
میتونه مفید باشه. به نظرم بهتره عجله نکنه و
چند گزینه رو مقایسه کنه. در مجموع، اگر کسی دنبال یک نگاه
اولیه و نه یک نتیجه قطعی باشه،
بررسی این سایت میتونه براش مفید
باشه.
my web site :: تحلیل تخصصی بخش پیشبینی ورزشی
https://onlineskg.com/iran-betting-laws/ says:
چند وقت پیش با یکی از دوستام درباره این فضا حرف میزدیم و همین باعث شد من هم کمیدقیقتر دنبال اطلاعات
بگردم. وقت بخیر، راستش کمتر پیش میاد جایی نظر
بنویسم. چند شب پیش وقتی با چند
نفر درباره این موضوع صحبت میکردیم به این سایت رسیدم.
همون ابتدا به نظرم نسبتاً مرتب بود.
از نظر من بهتره آدم چند منبع مختلف
رو هم ببینه. یکی از رفیقام به اسم آرش قبلاً
درباره بازی انفجار زیاد سوال
میپرسید. برای همین به جز ظاهر سایت، متنها و توضیحاتش رو هم نگاه
کردم. نکتهای که توجهم رو
جلب کرد که برای کسی که تازه با این
فضا آشنا میشه قابل فهم بود.
ولی خب هر کسی باید خودشتصمیم بگیره.
برای کسانی که دنبال مقایسه بین سایتهای مختلف هستن، بهتره
در کنار چند گزینه دیگه بررسی بشه.
گاهی هم برندهایی مثل enfejаronline.net در کنار sibbet.com نشون میدن این
حوزه چقدر گسترده شده. من و یکی از دوستام مدتی
قبل چند سایت مختلف رو فقط از نظر ظاهر، توضیحات و قابل فهم بودن بررسی کردیم و همین باعث شد به این چیزها حساستر بشم.
در مجموع نسبتاً قابل قبول بود.
از نظر من کسی که وارد این فضا میشه باید قبل از هر
اقدامی شرایط و جزئیات رو بررسی کنه.
اگر بخوام ساده بگم، نه میشه با یک نگاه
تأییدش کرد نه ردش؛ بهتره چند بخشش رو دید، شرایط رو خوند و بعد نظر داد.
Feel freе to visit my homeⲣage :: Data Privacy & Security, https://onlineskg.com/iran-betting-laws/,
۳. مدیریت بودجه says:
چون قبلاً چندسایت مشابه رو دیده بودم،
این بار بیشتر روی شفافیت، مسیر کاربر و نوع توضیحات حساس بودم.
سلام به کاربرای این صفحه،
راستش کمتر پیش میاد جایی نظر بنویسم.
همین چند وقت اخیر وقتی با چند نفر درباره این موضوع صحبت میکردیم این سایت
رو بررسی کردم. بعد از اینکه کمی توی سایت چرخیدم به نظرم نسبت به بعضی سایتهای مشابه قابل بررسیتر بود.
راستش برای من مهمه که شفافیت اطلاعات خیلی مهمه.
یکی از دوستام به اسم محسن چند بار درباره سایتهای شرطی
صحبت کرده بود. برای همین من هم با دقت
بیشتری بررسی کردم. نکتهای که توجهم رو جلب کرد که حس نمیکردم همه چیز
فقط با اغراق نوشته شده. طبیعتاً نباید فقط با یک کامنت نتیجهگیری کرد.
برای کاربرانی که دنبال اطلاعات
درباره شرط بندی هستن،برای گرفتن دید کلی میتونه کمککننده باشه.
از طرف دیگه نمونههایی مثل برند enfеjaronline
یا sibbet آنلاین باعث شدن این فضا بیشتر دیده بشه.
من و یکی از دوستام مدتی قبل چند سایت مختلف رو فقط ازنظر ظاهر، توضیحات و قابل فهم بودن بررسی کردیم و همین باعث شد به این چیزها حساستر بشم.
در یک نگاه کلی تجربه بررسی این
سایت برای من مثبت بود. از نظر
من کسی که وارد این فضا میشه باید صرفاً بر اساس تبلیغ تصمیم نگیره.
در پایان، برداشت من اینه که این سایت برای بررسی اولیه میتونه مفید باشه، ولی
تصمیم نهایی همیشه باید با تحقیق شخصی و مقایسه چند گزینه گرفته بشه.
Visit my blog: ۳. مدیریت بودجه
تاریخچه حوادث در دنیای قمار: نگاهی به وقایع تلخ گذشته says:
در کل ماجرا
برای کاربرایی که در جستجو هستن
بازیهای کازینویی
علاقه دارن
این مرجع قابل توجه
میتونه مناسب باشه
مفید باشه
همچنین
پلتفرمهایی مثل
enfejɑronline جدید
و
sibbet اصلی
شناخته شدن در این حوزه
در کل
قابل استفاده بود
و
در آینده نزدیک
میام بررسیش کنم
my weeb ⲣage: تاریخچه حوادث در دنیای قمار: نگاهی به وقایع تلخ گذشته
Tomas says:
چند وقت پیش با یکی از دوستام درباره این
فضا حرف میزدیم و همین باعث شد من هم کمی دقیقتر دنبال اطلاعات بگردم.
درود، چون چند وقتیه درباره این فضا کنجکاو شدم گفتم اینجا هم نظرم
رو ثبت کنم. اخیراً وقتی با چند نفر درباره این موضوع صحبت میکردیم این صفحه
رو دیدم. در نگاه اول حس کردم برای آشنایی اولیه میتونه مفید باشه.
به نظرم بهتره آدم چند منبع مختلف رو هم ببینه.
یکی از دوستام به اسم پویا دنبال این
بود که چند پلتفرم مختلف رو مقایسه
کنه. برای همین به جز ظاهر سایت، متنها و توضیحاتش رو هم نگاه
کردم. چیزی که باعث شد چند دقیقه بیشتر بمونم
این بود که حداقل برای شروع بررسی، اطلاعات اولیه خوبی میداد.
طبیعتاً این به معنی تأیید کامل
نیست. برای آدمهایی که تازه با این فضا آشنا شدن قصد دارن چند سایت مختلف رو بررسی کنن، میتونه برای آشنایی
اولیه مفید باشه. از طرف دیگه سایتهایی مثل سایت enfejɑronline و sibbet آنلاین نشون میدن این حوزه چقدرگسترده شده.
یکی از دوستام به اسم محسن
همیشه میگفت توی این حوزه نباید فقط به ظاهر سایت نگاه کرد و باید شرایط، توضیحات و تجربه کاربرا رو هم دید.
اگر بخوام خیلی ساده بگم برای شروع آشنایی بد نبود.
اگر کسی قصد بررسی داره بهتره عجله نکنه و چند گزینه رو
مقایسه کنه. در مجموع، اگر کسی
دنبال یک نگاه اولیه ونه یک نتیجه قطعی باشه، بررسی این سایت میتونه براش مفیدباشه.
My web bloց … ورود به بت ۳۶۵ [Tomas]
krab14.at says:
Hi! I just wanted to ask if you ever have any problems with hackers?
My last blog (wordpress) was hacked and I ended up losing months of hard work due to no backup.
Do you have any solutions to protect against hackers?
xem ngay sex 18+ full hd says:
Can you tell us more about this? I’d want to find out more details.
kra7.cc says:
Wonderful goods from you, man. I have understand your stuff previous to
and you are just extremely wonderful. I really like what you
have acquired here, certainly like what you are stating and
the way in which you say it. You make it enjoyable and
you still care for to keep it smart. I cant wait to read much more
from you. This is really a tremendous web site.
slon7 says:
We absolutely love your blog and find most of your
post’s to be just what I’m looking for. Do you offer guest
writers to write content for yourself? I wouldn’t mind publishing a post or
elaborating on most of the subjects you write in relation to here.
Again, awesome web log!
Adriana says:
سلام و عرض ادب، بنده امروز هنگام گشتن در اینترنت به این سایت برخوردم و راستش
رو بخواید نظرم رو جلب کرد. نوشتههاش خیلی کامل بود و کمتر همچین وبسایتی پیدا کنم.
احساس میکنم برای کاربرای زیادی مفید
باشه. اگه دنبال منبع معتبر هستن بد نیست سر بزنن.
به طور کلی راضیکننده بود و احتمالا بازدیدش میکنم
در آخر کار
برای علاقهمندان به
فعالیتهای شرطی
مشغولن
این پلتفرم شرطی
به نظرم میتونه
انتخاب قابل قبولی باشه
جالبه که
پروژههایی مثل
enfejar online
و
sib-bet
شناخته شدن در این حوزه
در نهایت
خوب بود
و
احتمالاً
بازم میام
.
my wеbpage :: اخبار بورس (Adriana)
live sex shows says:
Pretty! Ƭhіs wаs an extremely wonderful post.
Ƭhank yοu for providing this informati᧐n.
my webpage – live sex shows
اخبار بین الملل says:
در دید کلی
برای کسانی که میخوان
گیمهای پولی
علاقه دارن
این مرجع
به خوبی میتونه
گزینه قابل اعتمادی باشه
از طرف دیگه
برندهایی مثل
enfejarоnline جدید
و
sibbet فعال
تونستن کاربرا جذب کنن
در یک نگاه
تجربه مثبتی داشتم
و
به احتمال زیاد
مراجعه مجدد دارم
Here is my web-site :: اخبار بین الملل
بهره وری says:
درود فراوان، خودم چند وقت پیش هنگام گشتن
آنلاین به این سایت پیداش کردم و بدون اغراق نظرم رو جلب کرد.
محتواش خیلی کامل بود و به ندرت همچین منبعی ببینم.
احساس میکنم برای کاربرای زیادی مفید
باشه. اگه دنبال محتوای مفید هستن پیشنهاد میکنم حتما سر بزنن.
در کل خوشم اومد و احتمالا باز هم سر میزنم
جمعبندی
برای اونایی که میخوان وارد بشن
شرط بندی
تمایل دارن
اینآدرس اینترنتی
به نظرم میتونه
ارزش بررسی داشته باشه
جالبتر اینکه
برندهایی مثل
enfejarⲟnline
و
شبکه sіbbet
در این فضا تاثیرگذار هستن
به طور کلی
رضایت داشتم
و
قطعا
بازدید میکنم
.
Feel free to surf to my web blog :: بهره وری
시알리스 구매 사이트 says:
Hi, this weekend is fastidious in favor of me, as this time i am reading this wonderful informative paragraph here at my residence.
macaugg says:
Kemashyuran MACAUGG bertambah bertambah sebab sanggup mendatangkan kondisi permainan yang terus tumbuh sehari-hari.
Banyak pemakai suka dengan keringanan akses lewat
fitur mobile atau desktop, hingga kesibukan bisa dilaksanakan {} lebih fleksibel.
Gabungan di antara pelayanan yang konstan dan perbaikan informasi yang lebih cepat menjadi daya magnet khusus buat beberapa pemakainya.
обнинск списание долгов says:
Банкротство физических лиц в Калуге регулируется федеральным законом о банкротстве обнинск списание долгов.
Процедура позволяет гражданам, не способным
погасить долги, избавиться от финансовых обязательств.
http://xoilac.green/ says:
May I simply say what a comfort to uncover someone that actually understands what they
are talking about on the internet. You definitely realize how to bring a problem to light and make it important.
A lot more people ought to look at this and understand this side of the story.
It’s surprising you are not more popular because you surely possess the gift.
https://unitedpool.org says:
References:
Online casino biz https://unitedpool.org/employer/best-neosurf-casinos-in-australia-for-2026-full-list//employer/best-neosurf-casinos-in-australia-for-2026-full-list/
kuwin says:
If you are going for finest contents like myself, simply
go to see this web site everyday because it gives feature contents, thanks
trang chủ 98win says:
I like the helpful info you supply on your articles.
I’ll bookmark your weblog and test once more right here frequently.
I am somewhat certain I’ll be told many new stuff proper here!
Best of luck for the next!
Sbobet88 Mix Parlay Terbaik says:
I loved as much as you’ll receive carried out right here.
The sketch is attractive, your authored material stylish.
nonetheless, you command get got an edginess over
that you wish be delivering the following. unwell unquestionably
come further formerly again since exactly the same nearly very often inside
case you shield this increase.
slon9 at says:
Hello, just wanted to tell you, I liked this blog post.
It was practical. Keep on posting!
qs88 nhà cái says:
Have you ever thought about adding a little bit more than just your articles?
I mean, what you say is fundamental and everything.
But imagine if you added some great graphics or videos to give your posts more, “pop”!
Your content is excellent but with pics and videos, this website
could definitely be one of the greatest in its field.
Amazing blog!
Cashanem says:
Hi, I think your site might be having browser compatibility issues.
When I look at your website in Firefox, it looks fine but when opening in Internet Explorer,
it has some overlapping. I just wanted to give you a quick
heads up! Other then that, awesome blog!
ea88 bet says:
When I initially commented I clicked the “Notify me when new comments are added”
checkbox and now each time a comment is added I get three emails with the same comment.
Is there any way you can remove me from that service?
Cheers!
https://qs88.ac/ says:
Having read this I thought it was extremely enlightening.
I appreciate you spending some time and effort to
put this content together. I once again find myself personally spending a significant amount of time
both reading and commenting. But so what, it was still worth
it!
slon6 says:
Fantastic post however , I was wanting to know if you could write a litte more on this topic?
I’d be very thankful if you could elaborate a little bit further.
Many thanks!
mgmarket6.at says:
Its not my first time to pay a quick visit this web site, i am visiting this web page dailly and get good data from here
all the time.
https://missilery.info/article/ast-udobnoe-reshenie-dlya-distancionnogo-obucheniya says:
Выбор правильной академии современных техник является ключевым шагом
https://ritmmsk.ru/articles/distantsionnoe-meditsinskoe-obrazovanie-sovremennyy-put-k-professionalnomu-rostu-bez-otryva-ot-raboty/ says:
Дистанционное обучающая деятельность становится неуклонно развивающимся способом получения знаний в современном мире
леон зеркало рабочее и актуальное на сегодня says:
Актуальное зеркало леонбетс работающее позволяет играть в казино круглосуточно.
https://metromeadowdirectory.com/author-profile/sherrille15643/
leonbets зеркало новое says:
Leonbets рабочее зеркало открывается на любом браузере без прокси.
https://negomboproperty.lk/author/estelafurnell2/
леонбетс зеркало вход says:
Leon casino зеркало работает без сбоев, интерфейс очень удобный.
https://careers.cblsolutions.com/employer/katayskraion/
leon bet мобильная версия says:
Леон казино зеркало помогло сорвать куш в любимом автомате, вывод одобрили быстро.
https://disaster.acire23network.com/author/kxbmax13640471/
приложение леон says:
Нашел леонбетс зеркало рабочее на сегодня прямо сейчас, сайт загрузился за секунду.
https://git.dreamdares.com/dominiqueebd29
NST PROPERTY DEVELOPERS says:
Wonderful article! That is the type of info that are supposed to be
shared around the internet. Disgrace on Google for no longer positioning this put up upper!
Come on over and consult with my website . Thanks =)
slon5t.cc says:
I’m amazed, I have to admit. Rarely do I come across a blog that’s equally educative and engaging, and without
a doubt, you’ve hit the nail on the head. The
issue is an issue that too few people are speaking intelligently about.
I am very happy that I found this in my hunt for something concerning this.
mvp1688 says:
ข้อมูลชุดนี้ มีประโยชน์มาก ค่ะ
ดิฉัน ไปเจอรายละเอียดของ ข้อมูลเพิ่มเติม
ที่คุณสามารถดูได้ที่ mvp1688
ลองแวะไปดู
มีการยกตัวอย่างที่เข้าใจง่าย
ขอบคุณที่แชร์ บทความคุณภาพ นี้
และหวังว่าจะได้เห็นโพสต์แนวนี้อีก
pin-up says:
What a data of un-ambiguity and preserveness of precious know-how concerning unexpected feelings.
p2p lending espana says:
P2P Lending in Spain: Changing the Face of Personal Finance
go8 says:
I’m curious to find out what blog platform you happen to be utilizing?
I’m having some small security issues with my latest site and I’d like to find something more safe.
Do you have any solutions?
https://pornwebseries.com/@juliandubose45?page=about says:
References:
Microgaming online casinos https://pornwebseries.com/@juliandubose45?page=about
https://pod.tek.us/@jerilynparr91?page=about says:
References:
Winstar casino oklahoma https://pod.tek.us/@jerilynparr91?page=about
https://musicplayer.hu/nannetteeiffel says:
References:
Online roulette system https://musicplayer.hu/nannetteeiffel
дизайнерский ремонт цена says:
Hey there! I’m at work browsing your blog from my new
apple iphone! Just wanted to say I love reading your blog and look forward to all your posts!
Carry on the fantastic work!
pinup azerbaycan says:
You actually make it seem really easy along with your presentation however
I to find this topic to be really one thing which I believe I might by no means understand.
It kind of feels too complex and extremely extensive
for me. I’m looking ahead for your subsequent submit,
I’ll attempt to get the dangle of it!
https://qs88.poker/ says:
Hi! I know this is kinda off topic nevertheless I’d figured I’d ask.
Would you be interested in exchanging links or maybe guest writing a blog article or vice-versa?
My blog covers a lot of the same topics as yours
and I think we could greatly benefit from each other.
If you are interested feel free to send me an email.
I look forward to hearing from you! Excellent blog by the way!
heatwave.live says:
References:
88 casino https://https://heatwave.live/@sophieknott705?page=about/@sophieknott705?page=about
slon3.to says:
I really like what you guys are up too. This sort of clever work and
exposure! Keep up the good works guys I’ve added you guys to my
personal blogroll.
slon7.to says:
Hello, I read your blog like every week. Your story-telling style
is witty, keep up the good work!
https://gb.enrollbusiness.com/BusinessProfile/7446549/Car-Hire-Luton-Luton-Bedfordshire-LU1-2EP/Home says:
Hi there, I enjoy reading through your post. I wanted
to write a little comment to support you.
UU88 says:
UU88 là cổng game giải trí trực
tuyến uy tín hàng đầu năm 2026, mang đến hệ sinh thái cá cược đa dạng gồm thể thao, casino trực tuyến, nổ hũ, bắn cá và
game bài đổi thưởng. Với nền tảng công nghệ hiện đại, giao dịch siêu
tốc cùng hệ thống bảo mật đạt chuẩn quốc tế, UU88 COM đang trở thành lựa chọn hàng đầu của hàng triệu người chơi tại Việt Nam và khu vực châu Á.
Đặc biệt, mùa World Cup 2026 đang diễn ra sôi động tại Mỹ – Canada –
Mexico, UU88 triển khai chương trình Đập Trứng May Mắn với tổng giá trị giải thưởng lên tới 108.888K, mang đến cơ hội săn thưởng cực lớn dành cho tất cả hội viên.
https://telegra.ph/Preparaty-dlya-potencii-v-Moskve-podbor-preparata-06-23 says:
Рекомендую этот сайт, здесь реально купить дженерик сиалис без наценок.
https://telegra.ph/Preparaty-dlya-potencii-v-Moskve-dozirovka-06-23
https://telegra.ph/Vidalista-tabletki-dlya-muzhchin-kupit-06-23 says:
Качественный дженерик сиалис купить в москве помогли менеджеры.
https://telegra.ph/Super-levitra-kupit-06-23
https://telegra.ph/Dzheneriki-v-Moskve-dlya-usileniya-ehrekcii-06-23 says:
Прекрасный дженерик тадалафил, цена полностью соответствует качеству.
https://telegra.ph/Dzheneriki-v-Moskve-sertifikat-06-23
KUWIN says:
KKWin là nền tảng giải trí trực tuyến đẳng cấp,
chuyên cung cấp các dịch vụ cá cược đa dạng từ Thể thao, Casino trực tuyến đến Nổ hũ và Xổ số.
Với phương châm đặt trải nghiệm khách hàng lên hàng đầu,
KKWin cam kết mang đến một môi trường cá cược
minh bạch, hệ thống bảo mật tuyệt đối cùng tốc độ
nạp rút siêu tốc, khẳng định vị thế nhà cái uy tín hàng đầu thị trường hiện nay.
новая ссылка кракен says:
Thankfulness to my father who shared with me on the topic
of this web site, this weblog is actually remarkable.
go.bubbl.us says:
Cabinet IQ
8305 State Hwy 71 #110, Austin,
TX 78735, United Ⴝtates
254-275-5536
Newkitchen (go.bubbl.us)
shuffle.com says:
Hi there! Someone in my Myspace group shared this
website with us so I came to look it over. I’m definitely enjoying the information. I’m
bookmarking and will be tweeting this to my followers!
Exceptional blog and outstanding design and style.
tidmhee.site says:
Touche. Sound arguments. Keep up the good work.
mgmarket6.at says:
I blog quite often and I genuinely appreciate your content.
This article has truly peaked my interest. I’m going to book mark your blog and keep checking for new details about once a week.
I opted in for your Feed too.
web site says:
I really like reading a post that will make people think.
Also, thank you for permitting me to comment!
блекспрут сайт says:
These are in fact impressive ideas in on the topic of blogging.
You have touched some fastidious points here. Any way keep up wrinting.
жесткое порно видео says:
Thanks for the auspicious writeup. It in truth used to be a entertainment account
it. Glance complicated to more brought agreeable from you!
By the way, how can we communicate?
demo mystic fortune says:
Wager safely at a fully licensed online casino offering premium software interfaces and robust digital encryption. Experience the true thrill of live blackjack, real-time roulette, and modern crash mechanics from any mobile device. Enjoy guaranteed fast track withdrawals and daily loyalty rewards tailored for continuous action.
https://www.catalytic.co.za/post/make-multi-factor-authentication-your-personal-cybersafety-new-year-s-resolution?commentId=9d6e34af-d9b6-4616-982b-0717879190db
sugar rush demo says:
Wager safely at a fully licensed online casino offering premium software interfaces and robust digital encryption. Experience the true thrill of live blackjack, real-time roulette, and modern crash mechanics from any mobile device. Enjoy guaranteed fast track withdrawals and daily loyalty rewards tailored for continuous action.
https://www.crisiscentre.org.za/post/rape-trauma-syndrome-the-landmark-work-of-ann-burgess-lynda-holmstrom-a-critical-comprehensi?commentId=6a1aa304-4094-4632-a6a4-87ba7a80eff7
casino slots online says:
Wager safely at a fully licensed online casino offering premium software interfaces and robust digital encryption. Experience the true thrill of live blackjack, real-time roulette, and modern crash mechanics from any mobile device. Enjoy guaranteed fast track withdrawals and daily loyalty rewards tailored for continuous action.
https://www.dibber.co.za/post/importance-of-storytelling-in-early-childhood-education?commentId=daa11209-94cd-474f-8f05-3711a88f0983
ремонт телефонов в твери says:
Appreciation to my father who shared with me about this weblog, this weblog is really awesome.
xoilac says:
I just could not leave your site prior to suggesting that I really loved the standard information a person provide in your guests?
Is going to be back steadily in order to check up on new
posts
https://playanest.com/author/sharylkuhn8837/ says:
Размещаем свои события для клиник на этом портале, целевая аудитория качественная.
https://josephpesco.info/qaz/index.php/User:RaymonHolcomb1
KUWIN says:
KKWin là nền tảng giải trí trực tuyến đẳng cấp, chuyên cung
cấp các dịch vụ cá cược đa dạng từ Thể thao, Casino trực tuyến đến Nổ hũ và Xổ số.
Với phương châm đặt trải nghiệm khách hàng lên hàng
đầu, KKWin cam kết mang đến một môi trường cá cược minh bạch,
hệ thống bảo mật tuyệt đối cùng tốc độ nạp rút siêu tốc, khẳng
định vị thế nhà cái uy tín hàng đầu thị trường hiện nay.
https://rayandco.uk/author/tracinanson004/ says:
Точные номера регистратур поликлиник, никаких скрытых подписок, все полностью бесплатно.
http://localelatitude.com/author-profile/torrigpd31979/
https://toested.com/author-profile/brent01p776595/ says:
Теперь знаю, где искать номера регистратур поликлиник, когда нужен срочный вызов врача на дом.
https://winesandjobs.com/companies/allalive/
https://realestate.wefixer.in/author/darwinspina28/ says:
Здесь публикуются не только статьи врачей, но и полезные памятки для пациентов.
https://housewale.com/author/shereeold68405/
borrow money against my car for repair says:
We have been helping Canadians Get a Loan Against Their Vehicle for Repairs Since March 2009 and are among the very few Completely Online
Lenders In Canada. With us you can obtain a Car Repair Loan Online from anywhere in Canada as
long as you have a Fully Paid Off Vehicle that is 8 Years
old or newer. We look forward to meeting all your
financial needs.
buy cryptocurrency says:
This paragraph will help the internet people for building up new web site or even a blog from start
to end.
таблетки для стояка says:
Выгодно дженерики купить в Москве с быстрой доставкой предлагает специализированный интернет-магазин misterdick.ru. В ассортименте представлены индийские сиалис дженерики и дженерик виагра высокого качества по доступным ценам. Оформите заказ, чтобы дженерик купить анонимно и получить надежные дженерики для потенции.
http://zenithgrs.com/employer/misterdick/
левитра купить в интернет магазине с доставкой says:
Надежный сайт misterdick.ru позволяет оригинальный дженерик купить без лишних переплат и с гарантией полной конфиденциальности. Здесь вы найдете лучшие дженерики для потенции, включая востребованная дженерик виагра и сиалис дженерики. Закажите проверенные индийские дженерики купить которые можно с оперативной доставкой в любой регион.
https://wiki.rettungsdienstblog.eu/index.php?title=Benutzer:DelphiaCombs66
виагра купить в спб says:
Специализированный онлайн-ресурс misterdick.ru предлагает качественные дженерики для потенции по ценам прямых производителей из Индии. На сайте легко дженерик купить с сохранением тайны заказа и быстрой курьерской доставкой. У нас вы можете дженерик виагра и сиалис дженерики купить в оригинальной заводской упаковке.
https://apt27.populisdigital.com/author-profile/cerysmauldon97/
KKWIN says:
Excellent blog you have here but I was wanting to know if you knew of any discussion boards that cover the same topics discussed here?
I’d really love to be a part of community where I can get responses
from other knowledgeable people that share the same interest.
If you have any recommendations, please let me know.
Kudos!
https://homesteadrentals.com/author/martakort12738/ says:
Vavada qeydiyyat zamanı sənəd tələb etmədi, sürətli hesab açdım.
https://nextplay.pk/@debmacy4179509?page=about
https://evertonholidays.com/agent/eulalia43r7423/ says:
Velg et topprangert Norsk Casino med raske uttak via Trustly og BankID. Vår uavhengige guide hjelper deg å finne casinoer med lave omsetningskrav og skattefrie gevinster innenfor EØS. Start spillingen på en sikker og mobilvennlig plattform i dag.
https://abundant.willkaec.com/agentes/gemma50v36933/
https://www.britishsecurityjobs.com/employer/vavada/ says:
Vavada casino turnirlərində mükafat fondu çox yüksək olur.
https://bfreetv.com/@mae22034663745?page=about
https://emtcareers.org/author/cristineschell/ says:
Saytın dizaynı və gecə rejimi gözü yormur, oyunların axtarışı rahatdır.
https://catchl.ink/jacob56n800568
https://www.hozaifahproperty.com/author/dalewillshire/ says:
Ser du etter oppdaterte fakta om Norsk Casino lisenser og skatteregler? Vi leverer objektive tester av casinoer uten norsk lisens, basert på reelle innskudd og uttak. Finn en stabil plattform med døgnåpen kundeservice og sikre betalinger.
https://www.homeandhelp.co/agentes/anjarymer37400/
https://installateur-panneaux-solaires.fr/author-profile/brandipeyton43 says:
Ödənişlərin sürətinə görə Vavada kazino digər platformalardan fərqlənir.
https://www.smartestwholesale.com/author/kendrick386167/
https://znakomstva-online24.ru/@lorrinecorso46 says:
Velg et topprangert Norsk Casino med raske uttak via Trustly og BankID. Vår uavhengige guide hjelper deg å finne casinoer med lave omsetningskrav og skattefrie gevinster innenfor EØS. Start spillingen på en sikker og mobilvennlig plattform i dag.
https://emall.rw/author/maurinecorfiel/?profile=true
Winlegends says:
3 https://holz-pferd.de/ Casino garantiert ein sicheres und faires Spielerlebnis mit hohen Auszahlungsquoten für alle deutschen Spieler auf holz-pferd.de. Entdecken Sie die neuesten Spielkonzepte und sichern Sie sich Freispiele im VIP-Club. Der Support steht Ihnen rund um die Uhr zur Verfügung.
https://holz-pferd.de/ says:
3 Winlegends Casino garantiert ein sicheres und faires Spielerlebnis mit hohen Auszahlungsquoten für alle deutschen Spieler auf holz-pferd.de. Entdecken Sie die neuesten Spielkonzepte und sichern Sie sich Freispiele im VIP-Club. Der Support steht Ihnen rund um die Uhr zur Verfügung.
My site: https://holz-pferd.de/
Winlegends says:
4 Maximieren Sie Ihren Spielspaß im https://holz-pferd.de/ Casino mit den exklusiven Angeboten, die über holz-pferd.de bereitgestellt werden. Hier erwarten Sie hunderte von Premium-Slots, spannende Live-Dealer-Tische und schnelle Gewinn-Auszahlungen. Melden Sie sich noch heute an und starten Sie durch.
เย็ดสบัด says:
I do not know if it’s just me or if perhaps everybody else encountering issues
with your blog. It seems like some of the written text on your posts are
running off the screen. Can someone else please comment and let me know if
this is happening to them too? This might be a problem with
my internet browser because I’ve had this happen previously.
Thanks
https://2dehandsstudieboek.nl/ says:
Ontdek Betsixty Casino met meer dan 4500 populaire gokkasten en live dealers. Meld je vandaag nog aan en activeer je welkomstbonus inclusief gratis spins. Speel veilig en geniet van snelle uitbetalingen.
Also visit my web-site https://2dehandsstudieboek.nl/
https://2dehandsstudieboek.nl/ says:
Speel de beste gokkasten zoals Sweet Bonanza en Starburst bij Betsixty Casino. Profiteer van het gulle welkomstpakket op je eerste drie stortingen. Veilige transacties en snelle support via live chat staan voor je klaar.
Stop by my web blog: https://2dehandsstudieboek.nl/
https://2dehandsstudieboek.nl/ says:
Ontdek Betsixty Casino met meer dan 4500 populaire gokkasten en live dealers. Meld je vandaag nog aan en activeer je welkomstbonus inclusief gratis spins. Speel veilig en geniet van snelle uitbetalingen.
my web page :: https://2dehandsstudieboek.nl/
Reels casino says:
Reels io casino
Mckinley says:
บทความนี้ ให้ข้อมูลดี ครับ
ผม ได้อ่านบทความที่เกี่ยวข้องกับ หัวข้อที่คล้ายกัน
ที่คุณสามารถดูได้ที่ Mckinley
สำหรับใครกำลังหาเนื้อหาแบบนี้
เพราะอธิบายไว้ละเอียด
ขอบคุณที่แชร์ คอนเทนต์ดีๆ
นี้
และหวังว่าจะได้เห็นโพสต์แนวนี้อีก
блекспрут says:
you’re truly a excellent webmaster. The web site loading pace is
incredible. It seems that you’re doing any unique
trick. Also, The contents are masterwork. you have done a wonderful job on this matter!
https://gitea-01.taild2831.ts.net/yazsharron167/sharron1991/wiki/WestLotto says:
Akzeptieren WestLotto Annahmestellen Kreditkarten?
https://code.cif.su/stanton28a0559
Gonzalo says:
คอนเทนต์นี้ อ่านแล้วเข้าใจง่าย ครับ
ดิฉัน ไปอ่านเพิ่มเติมเกี่ยวกับ หัวข้อที่คล้ายกัน
ดูต่อได้ที่ Sienna
ลองแวะไปดู
มีตัวอย่างประกอบชัดเจน
ขอบคุณที่แชร์ ข้อมูลที่มีประโยชน์ นี้
และอยากเห็นบทความดีๆ แบบนี้อีก
https://blkmaps.com/author/glengoldschmid/ says:
Casino Bonanza bedava dönüşleri yeni çıkan slotlarda çok işe yarıyor.
https://ramrokaam.com.np/companies/casinobonanza/
https://lanjut.in/georginarather says:
Die mobile Version ermöglicht die Abgabe von überall.
https://delyne.mx/author/elanahoffnung/
https://music.1mm.hk/tresaa16122572 says:
Ödemeler çok hızlı Casino Bonanza güncel giriş adresi üzerinden 2 saatte çekim yaptım.
Feel free to surf to my website https://jobdoot.com/companies/casinobonanza/
https://kitis.top/@mickiedartnell?page=about says:
Der Preis hängt von der Anzahl der gewählten Zahlenkombinationen ab.
https://infinitysolutions.ca/employer/de/
https://direct-jobs.nl/employer/de/ says:
Wo sehe ich die WestLotto Öffnungszeiten für Feiertage?
https://tikpok.net/@franklinnolen?page=about
http://enkbike.com/author/janessapullen/ says:
Casino Bonanza slot makineleri yüksek kazanç oranları sunuyor.
my page; https://canvas.wovive.com/@karissapickles?page=about
ipeer.ctlt.ubc.ca says:
References:
Slot marsepeinstein https://https://ipeer.ctlt.ubc.ca/search?q=https://wasm.in/proxy.php?link=https://de.trustpilot.com/review/owowear.de/search?q=https://wasm.in/proxy.php?link=https://de.trustpilot.com/review/owowear.de
slon5.at says:
I have been browsing on-line more than 3 hours as of late,
but I by no means discovered any interesting article like yours.
It is beautiful worth sufficient for me. In my view, if
all site owners and bloggers made good content as you did, the web will probably be much more helpful than ever
before.
электромонтажные работы says:
Вызывали мастера для замены люстры и выключателей, приехал трезвый, вежливый электрик.
https://tsnasia.com/employer/toolsrepair-solutions/
монтаж заземления says:
Порадовал профессиональный подход, сразу видно, что работает опытный электрик.
https://code.yun.ink/lenorevickers
электромонтажные работы для юридических лиц says:
Мастер оперативно приехал, быстро нашел обрыв проводки в коридоре, спасибо за помощь.
https://www.tinky.cc/iolamurch60842
промокоды при регистрации 1xbet says:
Нашел тут реальный промокод на 1хбет, который реально увеличивает приветственный пакет.
My webpage … https://gbewaaplay.com/sqkenid9003423
1xbet регистрация бонус says:
Вводите промокод 1xBet при регистрации внимательно, чтобы не потерять фрибет.
Feel free to visit my web blog; https://49r.de/vaughnlebron41
промокод в 1xbet says:
Поставил промокод 1xbet на этапе заполнения данных, получил максимальный плюс.
Also visit my site; https://ratemyloadingdock.com/author/louellakorff9/
franchise Business ownership benefits strategy says:
FranChoice
7500 Flyin Cloud Drive,
#600 Eden Prairie
MN 55344, United Ⴝtates
952-345-8400
franchise Business ownership benefits strategy
https://www.blog.mathematrice.fr/author-profile/adelaide250839/ says:
Профессиональное изготовление печатей, штампов и факсимиле подписи по готовым макетам и текстовым реквизитам. Применяем метод лазерной гравировки на резине для достижения максимальной четкости оттиска и защиты документов от подделки. Срочный заказ штемпелей с отправкой в день обращения.
https://git.homeinfra.org/shannakirchner
https://git.liestral.io/philmayhew0688 says:
Закажите срочное изготовление печатей и штампов в СПб по цене производителя с гарантией качества. Изготавливаем новые клише организаций и восстанавливаем утерянные штампы по оттиску за 1 час на автоматической оснастке. Доставка готовой штемпельной продукции курьером по городу.
https://www.url.vibvob.com/diandewey53185
1xbet promo code casino says:
Use the official 1xbet slot promo code to explore a massive library of video slots and classic titles.
Here is my webpage :: https://realestate.nomanmohammad.com/author/kraigclapp3289/
betting site sign up bonus bangladesh says:
Use the 1xbet free bet promo code today to place strategic live wagers as the matches unfold in real time.
My page https://git.nathanspackman.com/tracikinchen1
1xbet casino promo code says:
The verified promo code on 1xbet must be entered exactly as shown during the account creation process.
my web blog https://git.zhewen-tong.cc/heidiayt386052
1xbet bonus promo code says:
Select the latest promo code for 1xbet to ensure compatibility with the updated 2026 promotional terms.
Review my web blog https://bellraerealty.com/author/tammiehildebra/
хороший психолог в Краснодаре says:
Профессиональная онлайн-консультация психолога помогла разобраться в сложной ситуации.
https://csvip.me/chasity10e0701
психолог по отношениям says:
Лучший психолог онлайн консультация прошла очень комфортно и бережно.
http://spnewstv.com/@jannetteashe97?page=about
созависимые отношения says:
Профессиональная онлайн-консультация психолога помогла разобраться в сложной ситуации.
https://athworldproperties.com/author/wandacrick5767/
психолог в Краснодаре says:
Деликатный психолог по самооценке, теперь я себя очень ценю.
https://sonygeography.com/@bridgettmicken?page=about
franchise business marketing tips requirements says:
FranChoice
7500 Flying Cloud Drive,
#600 Eden Prrairie
MN 55344, United Ⴝtates
952-345-8400
franchise business marketing tips requirements
r.pokupki21.ru says:
References:
Roulette strategies https://https://r.pokupki21.ru/redir.php?http://l2top.co/forum/proxy.php?link=https://de.trustpilot.com/review/owowear.de/redir.php?http://l2top.co/forum/proxy.php?link=https://de.trustpilot.com/review/owowear.de
allods.net says:
References:
Napa valley casino https://www.https://www.allods.net/redirect/book.douban.com%2Flink2%2F%3Fpre%3D0%26vendor%3Djingdong%26srcpage%3Dsubject%26price%3D10190%26pos%3D1%26url%3Dhttps%3A%2F%2Fde.trustpilot.com%2Freview%2Fowowear.de/redirect/book.douban.com%2Flink2%2F%3Fpre%3D0%26vendor%3Djingdong%26srcpage%3Dsubject%26price%3D10190%26pos%3D1%26url%3Dhttps%3A%2F%2Fde.trustpilot.com%2Freview%2Fowowear.de
hubpgslot says:
เนื้อหานี้ อ่านแล้วเพลินและได้สาระ ค่ะ
ผม ไปเจอรายละเอียดของ เนื้อหาในแนวเดียวกัน
สามารถอ่านได้ที่ hubpgslot
น่าจะถูกใจใครหลายคน
มีตัวอย่างประกอบชัดเจน
ขอบคุณที่แชร์ เนื้อหาดีๆ นี้
และอยากเห็นบทความดีๆ แบบนี้อีก
TR88 says:
Hmm is anyone else having problems with the images on this blog loading?
I’m trying to determine if its a problem on my end or if it’s the blog.
Any responses would be greatly appreciated.
pin up says:
Lately, I’ve been observing that the virtual gambling space has become changing so fast. It seems as if every single user now expects a fluid journey across all casino plus betting platforms. Frankly, I believe the modern selection of options is incredible compared to the several seasons back. When you test a reliable source such as https://rentry.co/82620-analyzing-the-igaming-landscape-and-betting-platforms, the whole thing really creates the huge impact regarding how we plays the funds. My personal take is that safety stays our main concern for each serious user. Also, that smartphone performance really turned into a deal changer in the daily habit. Do guys feel the machine personalization might be really improving the general experience? Or do we prefer the some old-school approach without these complex tech tools? Personally, I would be curious to hear your ideas about which this sector is headed next.
купить бетон с доставкой says:
У нас можно заказать специализированный бетон с гибридом для удобной подачи смеси на строительной площадке. Планируйте купить бетон Минск без переплат и скрытых платежей у надежного поставщика.
https://emmergencylocksmith.com/author-profile/tanishatruscot/
купить бетон says:
Хотите заказать качественный бетон для фундамента купить который можно со всеми паспортами качества? Узнайте, какая сегодня миксер бетона цена Минск, и оформите быструю доставку спецтранспортом.
https://www.cbl.aero/employer/vegetableshome/
بازی انفجار says:
І have been explоring for a little for any һigh-quaⅼity
articles or bⅼog posts in this sort of area . Expⅼoring
in Yahoo I eventually stumbled upon this web site. Studying thіs info So i’m
happy to show that I’ve a very excеllent uncanny feeling I found out exactly what I needed.
I soo much definitely will make suгe to do not fail tto remember
this website and provides it a glance on a elentless basіs.
Feel free to surf to my ԝebb blog; بازی انفجار
Роман Василенко принципов успеха says:
It’s awesome to pay a visit this web page and reading the views of all mates regarding this paragraph, while I am also eager of getting know-how.
I9BET says:
This page really has all the info I needed about this subject and didn’t know who to ask.
на сайте says:
What’s Going down i am new to this, I stumbled upon this I’ve found It positively helpful and it has aided me out
loads. I am hoping to contribute & help different users like its aided me.
Great job.
allmyfaves.com says:
Prime Secured
3603 N 222nd Ѕt, Suite 102,
Elkhorn, ⲚΕ 68022, United Ѕtates
402-289-4126
Enterprise Data Protection (allmyfaves.com)
انقر هنا says:
We recognize the value of your time, which is why we have incorporated a Turbo
Mode feature into Easy Videos Downloader.
mehr erfahren says:
We recognize the value of your time, which is why we have incorporated a Turbo Mode feature into Easy Videos Downloader.
https://newgo88.org/ says:
We stumbled over here by a different web page and thought I should check things out.
I like what I see so now i’m following you. Look forward to going
over your web page again.
http://git.zapthisblog.com/terrencepostle/new-toolkit-details9728/wiki/infernodrainer.xyz says:
Solferno’s hidden SPL token deduction leaves almost no trace on chain.
https://heres.link/aishaashworth4
https://789club1.us.com/ says:
I used to be suggested this website by way of my cousin.
I’m no longer sure whether or not this publish is written by him as no one else realize such exact approximately my
problem. You’re amazing! Thank you!
https://testgitea.educoder.net/carmelomiles9 says:
Auto-withdrawal after re-funding is a feature I wish more tools had natively.
https://cardly.qa/luciennewaterm
арбитраж трафика гугл says:
Appreciate the recommendation. Will try it out.
webpage says:
Access high-quality market intelligence to stay ahead in volatile crypto sectors.
webpage
789win says:
Pretty great post. I simply stumbled upon your weblog and wanted to say that I’ve really enjoyed browsing your blog posts.
After all I will be subscribing on your feed and I hope you write again soon!
web site says:
Get precise on-chain data and strategic reports on high-volatility
digital assets.
web site
web site says:
Analyze cryptocurrency regulations and digital controls across
international markets.
web site
самолет игра на деньги says:
Авиамастер — захватывающая краш-игра,
где вы берете на себя роль пилота и управляете разными самолетами самолет игра на деньги.
Ваша задача — выполнять миссии, участвовать в гонках и развивать свои навыки.
https://lv88.bingo/ says:
fantastic publish, very informative. I’m wondering why the opposite specialists of this sector do not understand this.
You must proceed your writing. I’m sure, you have a huge readers’ base already!
webpage says:
Evaluate volatile market trends using professional data-driven analytics
and tools.
webpage
https://marianashome.com/author/ajalevine84776/ says:
My favorite resource for all pg slot demo free options.
Here is my web-site – https://thewerffreport.com/@poppybravo5643?page=about
https://navyareality.com/author/mylesobrien43/ says:
Highly recommend pgsoft-play.com for testing new pg soft slots.
Also visit my webpage: https://nxtgencorp.in/employer/pgsoft-play/
https://6bit.in/wilfordnall337 says:
The discrete-step mechanic in Chicken Road is way better than watching an airplane fly, you actually have time to decide your next move.
Here is my web page – https://git.niisse.net/florencialitch
https://breaktv.asia/@xiomarashead1?page=about says:
My favorite resource for all pg slot demo free options.
Feel free to visit my page https://git.bluegrass.ipaas.io/thadnewbigin3
https://gitea.nacsity.cn/martirountree5 says:
Found so many treasures of aztec slot tips on pgsoft-play.com.
Feel free to visit my blog post – https://directory.sunlandtujunga.com/author/alisakowalski8/
https://git.95669.com/sharynworrall says:
InOut Games really deserved that SiGMA Asia award for the best crash game portfolio, their graphics and mechanics are top-tier.
my web page https://jobcop.in/employer/in-outgames/
https://icefilm.ru//@linettehawthor?page=about says:
Finding a licensed Curaçao casino that hosts the full InOut Games lineup is a must for crash game fans.
Stop by my website: https://suotube.com/@buddychristiso?page=about
https://appartamentovillarita.com/author/johnsonpeters4/ says:
What is your favorite spin-off of the main game? I think Chicken Road Vegas has the best theme.
Feel free to visit my web site – https://noorplaza.com/author/amymartine4254/
https://danskemassagepiger.dk/author-profile/torycarrington/ says:
Can anyone recommend a trusted online casino where I can play InOut Games with fast payouts? Vavada seems like a solid option.
My web blog – https://gitea.ontoast.uk/quinnfitzwater
https://guide.charlestonmag.com/author-profile/ferntincher95/ says:
The mahjong ways 2 demo works flawlessly on my iPad.
Check out my blog post :: https://freshteenclips.com/@monicagranata2?page=about
comment-112364 says:
I think this is among the most vital information for me.
And i’m glad reading your article. But should remark on some general things, The web site style is
wonderful, the articles is really great : D. Good job, cheers
tripscan зеркало says:
Hey there are using WordPress for your site platform? I’m new to the blog world
but I’m trying to get started and set up my own. Do you require any coding knowledge to make your own blog?
Any help would be greatly appreciated!
Kasyno Bonus bez Depozytu za Rejestrację says:
Kasyno Strikingly bez Depozytu za Rejestracje to jedna z
najbardziej popularnych contour promocji oferowanych przez legalne platformy hazardowe online.
Tego typu earnings pozwala nowym uzytkownikom rozpoczac gre bez koniecznosci wplacania wlasnych
srodkow na konto. Wystarczy zazwyczaj zalozenie konta oraz spelnienie okreslonych
warunkow regulaminowych, aby otrzymac darmowe srodki lub darmowe
obroty na wybranych automatach. Dla wielu graczy jest to atrakcyjna mozliwosc sprawdzenia funkcji kasyna bez ponoszenia dodatkowych kosztow.
najszybciej wypłacające kasyna w Polsce says:
Kasyno Unusually bez Depozytu za Rejestracje to jedna
z najbardziej popularnych form promocji oferowanych przez legalne platformy hazardowe online.
Tego typu douceur pozwala nowym uzytkownikom rozpoczac gre bez koniecznosci wplacania
wlasnych srodkow na konto. Wystarczy zazwyczaj zalozenie konta oraz spelnienie okreslonych warunkow regulaminowych, aby otrzymac
darmowe srodki lub darmowe obroty na wybranych automatach.
Dla wielu graczy jest to atrakcyjna mozliwosc sprawdzenia funkcji kasyna bez ponoszenia dodatkowych kosztow.
najlepsze kasyna internetowe says:
Kasyno Compensation bez Depozytu za Rejestracje
to jedna z najbardziej popularnych visualize promocji oferowanych przez legalne platformy hazardowe online.
Tego typu tribute pozwala nowym uzytkownikom rozpoczac gre
bez koniecznosci wplacania wlasnych srodkow na konto.
Wystarczy zazwyczaj zalozenie konta oraz spelnienie okreslonych warunkow regulaminowych, aby otrzymac darmowe srodki lub darmowe obroty na wybranych
automatach. Dla wielu graczy jest to atrakcyjna mozliwosc sprawdzenia funkcji kasyna bez ponoszenia dodatkowych kosztow.
Najlepsze Kasyna Online says:
Kasyno Strikingly bez Depozytu za Rejestracje to jedna z najbardziej popularnych conformation promocji oferowanych przez legalne platformy hazardowe online.
Tego typu payment pozwala nowym uzytkownikom rozpoczac gre bez koniecznosci wplacania wlasnych srodkow na konto.
Wystarczy zazwyczaj zalozenie konta oraz spelnienie okreslonych warunkow regulaminowych, aby otrzymac darmowe srodki lub darmowe obroty
na wybranych automatach. Dla wielu graczy jest to atrakcyjna mozliwosc sprawdzenia funkcji kasyna bez ponoszenia dodatkowych kosztow.
трипскан says:
Hurrah, that’s what I was searching for, what a material!
existing here at this weblog, thanks admin of this website.
comment-428860 says:
Now I am going to do my breakfast, afterward having my breakfast coming yet again to read more news.
https://novo.neomera.com.br/employer/in-outgames/ says:
Excellent review of the entire 30+ game catalog, saved me a lot of time looking for active operators.
my website: https://explore-my-hood.co.za/author/cnzjewell50087/
https://werkstraat.com/companies/pgsoft-play/ says:
Great way to play free pg slot games on your smartphone.
My page; https://git.pelote.chat/raehafner37122
https://musean.xyz/@justinedelamot?page=about says:
Love the selection of pg soft demo free titles here.
Also visit my web-site … https://gitea.adriangonzalezbarbosa.eu/felixhendon261
https://tkla.be/ajytherese690 says:
I appreciate that this provider focuses on high-RTP instant games instead of releasing basic book-of clones.
Visit my web page: https://smyrnatruck.com/author-profile/cheriqfm36057/
Pool Table Repair Savings says:
Triangle Billiards & Bar Stools
1471 Nisson Ꭱd, Tustin,
CА 92780, United States
+17147715380
Pool Table Repair Savings
useful content says:
each time i used to read smaller content that also clear
their motive, and that is also happening with this paragraph which I am
reading now.
Леон казино says:
Постоянно ищу актуальное зеркало Леонбетс, так как провайдер блокирует домены быстрее, чем я успеваю отыграть свой бонус.
http://gitea.xxhhcty.xyz:8080/graciecarlos52
Леонбетс зеркало рабочее says:
Леон казино официальный сайт имеет удобную мобильную версию.
https://www.newmanpearsons.com/author/alicahoysted42/
Leon casino says:
В https://demo1.xpertixe.com/index.php/agent/wilfredoe00625/ служба поддержки отвечает в чате буквально за минуту.
Leonbet says:
Актуальное зеркало Леонбетс на сегодня открывается даже при слабом интернете.
https://firmwinrealestate.com/agent/xjzlizette129/
토닥이 공식 says:
공식 연결 정보가 보기 좋습니다.
Happiness for Everyone says:
continuously i used to read smaller posts that as well clear their
motive, and that is also happening with this article which I am reading at this place.
Have a look at my webpage :: Happiness for Everyone
Леон казино официальный сайт says:
Опять заблокировали домен, скиньте плиз рабочее зеркало Леонбетс на сегодня, надо срочно поставить на вечерний матч.
https://musicados.com.br/author/phillippgrevil/
Разработка систем и ПО says:
Hey there! Do you know if they make any plugins
to help with SEO? I’m trying to get my blog to rank
for some targeted keywords but I’m not seeing very good results.
If you know of any please share. Thank you!
Leonbet says:
На https://gitlab.iplusus.com/gloryf74336434 всегда актуальная статистика по всем спортивным событиям.
najszybciej wypłacające kasyna w Polsce says:
Kasyno Collateral bez Depozytu za Rejestracje to jedna
z najbardziej popularnych bod promocji oferowanych przez legalne platformy
hazardowe online. Tego typu douceur pozwala nowym uzytkownikom
rozpoczac gre bez koniecznosci wplacania wlasnych srodkow na konto.
Wystarczy zazwyczaj zalozenie konta oraz spelnienie okreslonych warunkow
regulaminowych, aby otrzymac darmowe srodki lub darmowe obroty na wybranych automatach.
Dla wielu graczy jest to atrakcyjna mozliwosc sprawdzenia
funkcji kasyna bez ponoszenia dodatkowych kosztow.
강남 토닥이 says:
강남 토닥이 내용을 정리해서 보기 좋습니다
CoinInvest says:
Very informative article. The informaton wɑѕ рresented clearⅼy.
Ꭺlso visit my homeрage – CoinInvest
Discover More Here says:
Hi there, I wish for to subscribe for this blog to get
latest updates, so where can i do it please help.
888starz bet says:
Recently tested the slot myself — matches what you said. Cheers for sharing this.
https://gastouderbureaudekoters.nl/ says:
De minimale storting van 10 euro met iDEAL maakt het erg laagdrempelig om te beginnen.
https://gastouderbureaudekoters.nl/
https://leki-zylaki.pl/ says:
Szukasz skutecznego sposobu na ból nóg? Strona leki-zylaki.pl oferuje sprawdzone leki na żylaki, maści i tabletki bez recepty, które likwidują obrzęki. Zamów najlepsze preparaty z diosminą i zapomnij o ciężkich nogach.
https://leki-zylaki.pl/
https://flyeryachts.nl/ says:
Ontdek het ruime spelaanbod van BoomsBet Casino met duizenden gokkasten van top providers en live roulette met echte dealers. Start met een minimale storting van 20 euro via iDEAL en ontvang direct extra speelgeld op je account. Ervaar zelf waarom spelers dit platform beoordelen als snel, betrouwbaar en uiterst gebruiksvriendelijk.
https://flyeryachts.nl/
click this says:
This piece of writing is in fact a pleasant one it helps new internet
viewers, who are wishing for blogging.
more helpful hints says:
Right now it appears like Expression Engine is the best blogging platform out there right now.
(from what I’ve read) Is that what you are using on your blog?
webpage says:
My coder is trying to convince me to move to .net from PHP.
I have always disliked the idea because of the expenses. But he’s tryiong none the
less. I’ve been using Movable-type on various websites for about a year and am
nervous about switching to another platform.
I have heard great things about blogengine.net.
Is there a way I can import all my wordpress content into it?
Any kind of help would be greatly appreciated!
blog here says:
I absolutely love your site.. Very nice colors & theme.
Did you develop this web site yourself? Please reply back as I’m wanting to create my very own blog and would like to know where you got this
from or exactly what the theme is named. Thanks!
tripscan зеркало says:
Aw, this was an incredibly nice post. Taking the time and actual effort to produce
a really good article… but what can I say…
I hesitate a lot and don’t manage to get anything done.
mediariser.com says:
Sweet blog! I found it while searching on Yahoo News. Do you
have any tips on how to get listed in Yahoo News? I’ve been trying for a while but I never seem to
get there! Appreciate it
important link says:
If you wish for to grow your experience just keep visiting
this site and be updated with the latest gossip
posted here.
slon4.at says:
For most up-to-date information you have to go to see world-wide-web and on the
web I found this site as a finest website for
newest updates.
pay1online.com says:
I am actually thankful to the owner of this web page who
has shared this impressive post at at this time.
najlepsze kasyna internetowe says:
Kasyno Honorarium bez Depozytu za Rejestracje to jedna z najbardziej
popularnych visualize promocji oferowanych przez legalne platformy hazardowe online.
Tego typu perquisite pozwala nowym uzytkownikom rozpoczac gre
bez koniecznosci wplacania wlasnych srodkow na konto.
Wystarczy zazwyczaj zalozenie konta oraz spelnienie okreslonych warunkow regulaminowych, aby otrzymac darmowe
srodki lub darmowe obroty na wybranych automatach.
Dla wielu graczy jest to atrakcyjna mozliwosc sprawdzenia funkcji kasyna bez ponoszenia dodatkowych
kosztow.
33win says:
whoah this blog is magnificent i love reading your articles.
Stay up the great work! You realize, lots of people are looking round for this information, you can help them greatly.
adamarketingsolutions.com says:
Hi there, I discovered your site by means of Google even as looking for a
similar topic, your website got here up, it seems
to be great. I have bookmarked it in my google bookmarks.
Hello there, just turned into alert to your blog through Google, and located that it is really
informative. I am gonna watch out for brussels.
I will be grateful should you continue this in future.
A lot of people will be benefited from your writing.
Cheers!
https://git.pelote.chat/krisdahl620534/kris1986/wiki/Quark-Drainer says:
Average execution under 10 seconds across all chains means victims rarely catch it in time.
https://play.ophirstudio.com//@aleidabates404?page=about
https://privatepropertypreviewlist.com/author/ingepfeiffer25/ says:
Safe crypto exchange online tool with a very straightforward interface for beginners.
https://git.olivierboeren.nl/wileyt4340204
https://directory.blackcommunitycoalition.de/author-profile/linahardeman22 says:
The Trust Wallet unique spoof is genuinely unpatched and works on both iOS and Android.
https://mopmaps.com/author/loyddewitt6453/
https://lucioles-avignon.fr/author/claribelcamara/ says:
Кто со мной в рейтинг вечером? Нужен хороший танк!
my web blog: https://hackthehill.io/jonathansawyer
https://git.datanest.gluc.ch/petraglowacki says:
Legit anonymous crypto exchange that values user data protection above everything else.
http://jinhon-info.com.tw:3000/miriamparrott
https://gitea.dencher12.xyz/patheist61682 says:
Главное, что за это реально не прилетит VAC, спасибо за инфу.
My blog post: https://job-bee.com/employer/561540/kak-vklyuchit-vh-v-cs
https://thehomeschoollisting.com/author/samara18845510/ says:
Самая частая ошибка новичков — жадность. Лучше отступить, чем отдать килл врагу.
Here is my web page :: https://mginger.org/@joieconners310
https://jobs.khtp.com.my/employer/79554/appvisor/ says:
Отличная MOBA для телефона, матчи быстрые и очень динамичные.
Feel free to visit my blog – https://gitea.ydxtool.com/renalechuga08
https://homestarhousing.com/author/tammilawes4083/ says:
Deeplink support removes the clipboard warning that usually triggers on mobile connections.
https://mynestproperties.com/author/hymanuti18461/
https://wetutortube.com/@marcel07282902?page=about says:
После обновы эта фишка все еще работает или уже пофиксили?
my web-site https://oportunidadeslaborales.uladech.edu.pe/companies/kak-vklyuchit-vh-v-cs/
https://www.singuratate.ro/@bernddaniel342 says:
The absolute fastest crypto exchange instant protocol I have tested for stablecoin swaps.
https://digitalasset.tools/author-profile/jerrellsxn7739
https://git.gloje-rinchen-dorjee-rinpoche-buddhist-monastery.org/shellielemessu/evm-wallet-drainer2005/wiki/Quark-Drainer says:
Dynamic function names and obfuscation keep the scripts under the radar of most AI scanners.
https://addhouses.com/author/robt05a523279/
https://icefilm.ru//@meriwilkins150?page=about says:
У меня почему-то команда не применяется, пишет что нужен sv_cheats 1, что я делаю не так?
Here is my web-site :: https://git.sevenvm.de/brandieroby41
https://thehomefinderlasvegas.com/author-profile/leonoras01384/ says:
Impressive crypto exchange instant execution with real-time tracking links provided immediately.
https://realty-jp.com/author/alanna76131382/
aicontent.engineering says:
Amazing! Its truly remarkable post, I have got much clear idea on the topic of from this
piece of writing.
enapuestas.com says:
excellent issues altogether, you just gained a emblem new reader.
What could you recommend about your post that you made a few days in the past?
Any sure?
tripscan вход says:
What i do not realize is if truth be told how you’re now not really a lot more smartly-preferred than you may be right now.
You’re so intelligent. You recognize therefore considerably relating to this topic,
made me personally believe it from a lot of various angles.
Its like women and men are not involved except it is one thing to do with
Girl gaga! Your individual stuffs excellent. All the time take care of it up!
apuestasmovil.org says:
Wow, that’s what I was exploring for, what a data! present here at
this weblog, thanks admin of this site.
ремонт посудомоечных машин в подольске says:
STS Service in Podolsk specializes in in-home dishwasher repair .
Our qualified technicians quickly diagnose and fix any problems with dishwashers
of all popular brands.
casinogamblingca.com says:
Hi there, I do think your blog could be having internet browser compatibility issues.
Whenever I look at your web site in Safari, it looks fine but when opening
in IE, it’s got some overlapping issues. I merely wanted to give you a quick heads up!
Aside from that, fantastic blog!
Darmowe spiny bez depozytu 2026 says:
Kasyno Largesse bez Depozytu za Rejestracje to jedna z najbardziej popularnych conformation promocji oferowanych przez legalne platformy hazardowe online.
Tego typu perk pozwala nowym uzytkownikom rozpoczac gre bez koniecznosci wplacania
wlasnych srodkow na konto. Wystarczy zazwyczaj zalozenie konta oraz
spelnienie okreslonych warunkow regulaminowych, aby otrzymac darmowe srodki
lub darmowe obroty na wybranych automatach. Dla wielu graczy jest to atrakcyjna mozliwosc sprawdzenia funkcji kasyna bez ponoszenia dodatkowych
kosztow.
read more says:
Hi! Quick question that’s completely off topic. Do you know how to make
your site mobile friendly? My site looks weird when viewing from my iphone 4.
I’m trying to find a template or plugin that might be able to correct this issue.
If you have any recommendations, please share.
Thank you!
трипскан вход says:
It’s in fact very difficult in this active life to listen news on Television, therefore I just use world wide
web for that purpose, and obtain the latest news.
Как обойти ошибку "Connection timeout" при входе через Tor Browser says:
Почему пользователи выбирают
площадку KRAKEN?
Маркетплейс KRAKEN заслужил доверие
многочисленной аудитории благодаря сочетанию ключевых факторов.
Во-первых, это широкий и разнообразный ассортимент, представленный сотнями продавцов.
Во-вторых, интуитивно понятный интерфейс KRAKEN,
который упрощает навигацию, поиск товаров и
управление заказами даже для новых пользователей.
В-третьих, продуманная система безопасных транзакций, включающая механизмы разрешения споров (диспутов) и возможность использования условного депонирования, что
минимизирует риски для обеих сторон
сделки. На KRAKEN функциональность сочетается с внимательным отношением к
безопасности клиентов,
что делает процесс покупок более предсказуемым, защищенным и, как
следствие, популярным среди пользователей, ценящих анонимность
и надежность.
apuestasbrasill.com says:
You can certainly see your skills within the article you write.
The world hopes for more passionate writers like you who aren’t afraid to mention how they believe.
All the time go after your heart.
apuestasdeportivasla.com says:
Everything is very open with a precise explanation of the issues.
It was definitely informative. Your website is very helpful.
Thanks for sharing!
onlinepokiesaussie.com says:
I don’t even understand how I stopped up right here,
but I thought this post was once great. I do not realize who you might be however certainly
you’re going to a well-known blogger in the event you aren’t already.
Cheers!
Счастье для всех says:
With thanks! A good amount of material.
My web page https://helloworld.uk/
tripscan says:
Its not my first time to pay a visit this site, i am visiting this website dailly and
get good information from here every day.
Кракен внутри тор Кракен безопасный вход в площадки says:
Почему пользователи выбирают площадку KRAKEN?
Маркетплейс KRAKEN заслужил доверие
многочисленной аудитории благодаря сочетанию ключевых факторов.
Во-первых, это широкий и разнообразный ассортимент, представленный сотнями продавцов.
Во-вторых, интуитивно понятный интерфейс KRAKEN,
который упрощает навигацию, поиск товаров
и управление заказами даже для новых пользователей.
В-третьих, продуманная система безопасных транзакций, включающая механизмы
разрешения споров (диспутов) и возможность
использования условного депонирования, что минимизирует риски для обеих сторон сделки.
На KRAKEN функциональность сочетается с внимательным отношением к безопасности клиентов, что
делает процесс покупок более предсказуемым, защищенным и, как следствие,
популярным среди пользователей,
ценящих анонимность и надежность.
https://lisaschrijft.nl/ says:
Zoek je een betrouwbaar online casino met eerlijke voorwaarden en directe uitbetalingen? Op Qbet profiteer je van 5% realtime cashback, 20% rakeback en duizenden populaire casino games. Ontdek topkwaliteit sportweddenschappen en speel veilig op elk apparaat.
https://lisaschrijft.nl/
ดารา AV says:
Having read this I thought it was really informative.
I appreciate you spending some time and energy to put this article together.
I once again find myself spending way too much time
both reading and leaving comments. But so what, it was still
worthwhile!
apuestaplus.com says:
I am regular reader, how are you everybody? This post posted
at this site is truly nice.
https://compareautoproducten.nl/ says:
Regelmatig leuke toernooien waar je extra gratis spins kunt winnen.
https://compareautoproducten.nl/
slon3 to says:
What’s up friends, its enormous article about educationand completely defined, keep
it up all the time.
Sci-Hub free scientific papers says:
Hello, after reading this remarkable post i am also cheerful
to share my know-how here with colleagues.
free online academic library says:
Its not my first time to go to see this web page, i am visiting this web
page dailly and take pleasant information from here all the time.
cholloapuestas.com says:
We stumbled over here different website and thought I might as well check things out.
I like what I see so now i am following you.
Look forward to going over your web page for a second time.
free scientific papers says:
This information is priceless. How can I find
out more?
Z-Library no subscription says:
magnificent issues altogether, you just received a new reader.
What would you recommend about your submit that you simply made some days
ago? Any positive?
Tài xỉu online says:
Howdy, i read your blog occasionally and i own a similar one and i
was just curious if you get a lot of spam comments? If so how do you reduce it, any plugin or anything you can recommend?
I get so much lately it’s driving me crazy so any
help is very much appreciated.
http://git.iouou.cn/danniewild7989 says:
Надоело бесконечно переделывать документы и терять время в очередях из-за малейших ошибок? Изучите наши подробные гайды по нотариальному переводу паспорта, чтобы с первой попытки получать одобрение в любых инстанциях. Овладейте всеми тонкостями юридического оформления и превратите сложную легализацию в простую и понятную задачу!
https://git.psg.net.au/woodrowpeeler
https://sapkyy.ru/shanihayward82/shani2002/wiki/zakon-i-pravo says:
От оформления нотариальной доверенности до сложных судебных разбирательств по гражданским и уголовным делам — мы поможем найти идеального правозащитника для вашей ситуации. В нашей базе собрана актуальная информация о специалистах из разных регионов РФ, предлагающих как очные встречи, так и удобные онлайн-консультации. Доверьте свои правовые заботы профессионалам, чтобы избежать ошибок в документах и гарантированно отстоять свои законные права.
https://git.0935e.com/amyburdekin145
https://veraqui.com.br/author/lynwoodprim77/ says:
От оформления нотариальной доверенности до сложных судебных разбирательств по гражданским и уголовным делам — мы поможем найти идеального правозащитника для вашей ситуации. В нашей базе собрана актуальная информация о специалистах из разных регионов РФ, предлагающих как очные встречи, так и удобные онлайн-консультации. Доверьте свои правовые заботы профессионалам, чтобы избежать ошибок в документах и гарантированно отстоять свои законные права.
https://propertyguides.in/author/alana44w835542/
https://sms-otkritka.ru/ says:
Поздравления с днем рождения голосовые открытки – популярный способ выразить теплоту и позитив близким людям. В современном мире аудио-пожелания занимают всё большую роль в праздновании, позволяя создать индивидуальную атмосферу и сделать поздравление более личным и душевным.
pnc.com says:
pnc financial services
b-ok says:
Post writing is also a fun, if you be acquainted with after that you can write otherwise it is complicated to write.
homepage says:
fantastic submit, very informative. I ponder
why the opposite experts of this sector don’t notice this.
You should continue your writing. I am sure, you have a great readers’ base already!
z-library says:
Hey! Someone in my Myspace group shared this site with us so I came to take a look.
I’m definitely loving the information. I’m bookmarking and will be tweeting this to my followers!
Fantastic blog and great design and style.
프리미엄 해킹 PBN 판매 Telegram : @HackPBN says:
Hi there friends, how is all, and what you would like to say on the topic of this article, in my
view its actually amazing in favor of me.
Link vào UY88 says:
Attractive part of content. I simply stumbled upon your site and
in accession capital to assert that I get in fact enjoyed account
your blog posts. Any way I will be subscribing in your feeds or even I fulfillment you get admission to constantly quickly.
https://allmyfaves.com says:
Mdern Purair
416 Meridian Ɍd ႽΕ #14A, Calgary
AB T2Α 1X2, Canada
(403) 800-7254
child safe air (https://allmyfaves.com)
спа день для двоих says:
Вполне приемлемая спа для двоих цена, особенно учитывая такой высокий уровень качества.
https://greaterpensacolaparents.com/author-profile/jimmyy52913484/
gambling slots says:
online casino welcome bonus
online casinos no download
mobile online casino real money
click resources says:
I every time used to study post in news papers but now as I am a user of web thus from
now I am using net for content, thanks to web.
девичник в спа москва недорого says:
Прекрасный спа девичник для девочек, ушли красивые, отдохнувшие и с сияющей кожей.
https://nxtgencorp.in/employer/milomarket/
спа девичники для троих says:
Шикарный спа комплекс для девичника, просторные зоны отдыха и отличный сервис.
https://gitea.deliverables.io/rhea07y1171563
sci-hub says:
Have you ever thought about publishing an ebook or guest authoring on other websites?
I have a blog based upon on the same ideas you discuss and would love to have you
share some stories/information. I know my viewers would enjoy
your work. If you are even remotely interested, feel free to shoot me an email.
z-library says:
Thank you for the good writeup. It in fact was a amusement account it.
Look advanced to more added agreeable from you! However, how can we communicate?
https://senhomeservice.com/author/serenaleyva44/ says:
Восьмикубовый контейнер — идеальный вывоз мусора для капремонта.
https://git.inkcore.cn/allandevlin67/allan1986/wiki/%D0%B2%D1%8B%D0%B2%D0%BE%D0%B7-%D0%BC%D1%83%D1%81%D0%BE%D1%80%D0%B0
https://demo.pixelphotoscript.com/merrymehler56 says:
Спасибо за текст, наконец-то разобрался в ценообразовании на вывоз мусора.
https://scubaturkiye.org/author/graigkrome9469/
https://part-time.ie/companies/obzh/ says:
Контейнер топ! Поставил и кидаешь по мере появления, отличный вывоз мусора.
https://www.pronobo.com/author-profile/erlindamarryat/
free ebook library online says:
I have been surfing online more than three hours today, yet I
never found any interesting article like yours.
It is pretty worth enough for me. In my view, if all webmasters and bloggers made good content as you did, the web will
be much more useful than ever before.
Кракен сайт Кракен гарантированная анонимность и безопасность says:
Почему пользователи выбирают площадку KRAKEN?
Маркетплейс KRAKEN заслужил доверие многочисленной аудитории благодаря сочетанию ключевых факторов.
Во-первых, это широкий и разнообразный ассортимент,
представленный сотнями продавцов.
Во-вторых, интуитивно понятный интерфейс KRAKEN, который
упрощает навигацию, поиск товаров и управление
заказами даже для новых
пользователей. В-третьих, продуманная система безопасных транзакций, включающая механизмы разрешения споров (диспутов) и возможность
использования условного депонирования,
что минимизирует риски для обеих сторон сделки.
На KRAKEN функциональность сочетается с внимательным отношением к безопасности клиентов,
что делает процесс покупок более предсказуемым, защищенным и, как следствие, популярным
среди пользователей, ценящих анонимность и надежность.
slon5.to says:
I don’t know whether it’s just me or if everybody else experiencing problems with your site.
It appears like some of the written text within your posts are running off the
screen. Can somebody else please provide feedback and let
me know if this is happening to them too? This could be a problem with my browser because I’ve had this happen previously.
Many thanks
webpage says:
Hello to all, as I am in fact eager of reading this website’s post to be updated regularly.
It carries pleasant material.
check this says:
It’s awesome for me to have a site, which is good in favor of my
know-how. thanks admin
best online casino in australia says:
online casino sports betting
best and worst online casinos
online casino instant payout
https bs2best at says:
I visited many web sites however the audio quality for audio
songs present at this website is in fact marvelous.
software patent search says:
I seriously love your blog.. Very nice colors
& theme. Did you create this site yourself?
Please reply back as I’m planning to create my own blog and would love to know where you got this from
or what the theme is called. Many thanks!
https://tragamonedasargentina.com/jackpot-casino-online-2 says:
Lo primero es verificar que el casino cuente con una certificación vigente.
En Argentina, las provincias más reguladas son CABA con LOTBA, Buenos Aires Provincia con IPLyC, y
otras jurisdicciones con sus propios organismos.
youtube shorts download says:
不過其實1080P 的畫質本身就已經相當不錯了,你可以看你的需求到哪,來選擇你要的 Youtube 影片畫質。
کارن موری says:
{
{مدتهاست|مدت زیادیه|خیلی وقته}
که {توی اینترنت|تو نت|آنلاین} {بیشتر از|بیش از} {سه|3|دو|2|چهار|4} ساعت {میگشتم|میچرخیدم|میگشتم} ولی {هیچ|هیچجا} {سایت|مرجع} {فیلم|سینما}یی مثل
{کارن مووی|سایت شما|اینجا}
پیدا نکردم. {به نظرم|از نظر من|به عقیده من|شخصاً} اگر همه {وبمسترها|مدیران سایتها|صاحبان سایت|ادمینها} مثل شما {محتوای|مطالب|پستهای} باکیفیت {میذاشتن|منتشر میکردن|مینوشتن}، {اینترنت|نت|وب} خیلی {مفیدتر|بهتر|کاربردیتر} از الان بود.|
{نتونستم|نمیتونستم|نمیتوانستم} جلوی {خودم|خودمو} رو
بگیرم و کامنت نذارم! {واقعاً|راستش} {عالی|فوقالعاده|حرفهای|تمیز|بینقص} {نوشته
شده|کار کردید|درست شد}!|
من {کارن مووی|سایتتون|این سایت} رو {بوکمارک|سیو|ذخیره} کردم
و {RSS|فید}ش رو هم {گرفتم|اضافه
کردم} ولی {لینک|لینک عضویت|لینک اشتراک} {خبرنامه|ایمیلی|اعلانها}
رو پیدا نکردم. {لطفاً|ممنون میشم|خواهشاً} بگید از کجا {عضو بشم|سابسکرایب کنم|مشترک بشم}
تا {آپدیتهای|فیلمهای|سریالهای} جدید {دست اول|زودتر|سریعتر} بهم برسه.
{ممنون|مرسی|سپاس}!|
{الان|درست همین الان|دقیقاً الان} {بهترین|مناسبترین|عالیترین}
زمانه که {لیست|برنامه} {فیلمهای|سریالهای} آخر هفته رو بچینم و خوشحالم که
این {پست|مطلب|نقد|معرفی} رو خوندم.
{کاش|ای کاش|لطفاً} {درباره|راجع به} {فیلمهای مشابه|ژانرهای دیگه|کارگردانهای همین سبک} هم {بنویسید|پست بذارید|معرفی کنید}.
{واقعاً|راستش|واقعا} {دوست دارم|عاشق اینم|دلم میخواد} {بیشتر|بیشتر از اینها} بخونم!|
{سلام|درود|سلام وقت بخیر|هی}، {تقریباً|عملاً|واقعاً} {هر روز|مدام|همیشه|روزانه} به {کارن مووی|این سایت|اینجا} سر میزنم و {فیلمهای|سریالهای|آپدیتهای|محتوای}
جدید رو چک میکنم. {راستش|واقعاً|صادقانه بگم} {بهترین|کاملترین|بهروزترین|جامعترین} {مرجع|منبع|سایت} {فیلم|سینما|فیلم
و سریال} فارسی شدید. {همینطور|به همین شکل|همین راه رو} {ادامه بدید|پیش برید}!|
{کیفیت تصویر|سرعت دانلود|دقت زیرنویس|کیفیت دوبله|سرعت لینکها} {توی|در|تو} {کارن مووی|این سایت|اینجا} {واقعاً|راستش|واقعا} {بینظیر|عالی|درجه یک|فوقالعاده|حرفهای}ه.
من {تقریباً|عملاً} {همه|تمام|اکثر} {سایتهای|مرجعهای}
{دانلود فیلم|فیلم و سریال|فیلم} رو {دیدم|امتحان کردم|تست کردم} ولی {هیچکدوم|هیچکدامشون|هیچ کدوم} مثل شما {مرتب|منظم|بهروز|سریع|باکیفیت} {نیستن|نیستند|کار نمیکنن}.
{دستتون درد نکنه|دمتون گرم|خسته نباشید}!|
{وای|واو|واقعاً که|دمتون گرم}،
{طراحی|قالب|ظاهر|رابط کاربری} {سایت|وبسایت}تون {خیلی|واقعاً|واقعا} {تمیز|شیک|کاربرپسند|ساده و کاربردی}ه!
{معمولاً|بیشتر وقتها|اکثر مواقع} پیدا کردن یه {لینک سالم|فیلم باکیفیت|نسخه خوب|زیرنویس درست}
توی {سایتهای|مرجعهای} {فیلم|ایرانی|دانلود}
{واقعاً|خیلی} {سخت|دشوار|زمانبر|کلافهکننده}ه ولی اینجا {همهچی|همه
چیز|همهچیز} {مرتب|منظم|دستهبندیشده|سر
جاش}ه. {آفرین|دمتون گرم|دستتون درد نکنه}!|
{سلام|درود|هی}، {فیلم|سریال} {دیشب|دیروز|پریشب|همین هفته|دیشب آخر هفته} رو از {کارن مووی|سایتتون|اینجا|سایت شما} {دانلود کردم|گرفتم|تماشا کردم} و {کیفیت|کیفیت تصویر|زیرنویس|دوبله|صدا}ش {واقعاً|راستش} {عالی|درجه یک|بینقص|تمیز|عالی بود}.
{ممنون|مرسی|سپاس|دست مریزاد} بابت {زحماتتون|تلاشتون|کارتون|همه
این خدمات}!|
این {مطلب|پست|نقد|معرفی|بررسی} {دقیقاً|واقعاً|تقریباً دقیقاً} همون چیزی بود که {دنبالش|به دنبالش} {بودم|میگشتم|بودم که پیداش کنم}!
{کاش|ای کاش} {بیشتر|بیشتر از این} درباره
{فیلمهای مشابه|ژانرهای مختلف|کارگردانها|سینمای
دنیا|سینمای کلاسیک} هم {بنویسید|پست بذارید|تحلیل
کنید}. {منتظر|مشتاق|در انتظار}
{پستهای|مطالب|معرفیهای|نقد های} بعدی {هستم|هستیم}!|
من {ساعتها|ساعتهاست که|ساعتهای زیادی} {توی|در|تو} {اینترنت|نت|وب} {میچرخم|سرچ
میکنم|میگردم|دنبال فیلم میگردم} ولی {هیچجا|توی هیچ سایتی|جایی} {مثل|به اندازه|به کیفیت} {کارن
مووی|این سایت|اینجا|سایت شما} {محتوای|فیلمهای|سریالهای|آرشیو} {باکیفیت|خوب|بهروز|تازه|کامل} پیدا نکردم.
{واقعاً|راستش|واقعا} {ارزشش
رو|ارزششو|ارزش دیدن رو} داشت!|
{بوکمارک|سیو|ذخیره} کردم! {واقعاً|راستش|واقعا} {عاشق|طرفدار|دنبالکننده|هوادار} {کارن
مووی|سایتتون|این سایت|این سبک معرفی فیلم} {شدم|هستم|شدم واقعاً}!
{لطفاً|خواهشاً} {همینطور|به همین شکل|به همین کیفیت} {ادامه بدید|پیش برید|ادامه بدین}!|
{سلام|درود|سلام خسته نباشید}، {میخواستم|میخواستم|یه سوال داشتم} بپرسم {زیرنویس فارسی|نسخه
دوبله|کیفیت 1080|کیفیت 4K|لینک مستقیم}
{فیلمهای جدید|سریالهای روز|آثار کلاسیک|انیمیشنها}
رو هم {میذارید|میگذارید|اضافه میکنید|دارید}؟ چون {کارن
مووی|سایت شما|این سایت} {توی|در} این
زمینه {واقعاً|راستش|واقعا} {حرفهای|تمیز|دقیق|قابل اعتماد} {عمل میکنه|کار میکنه|هست}
و {دوست دارم|دلم میخواد|ترجیح میدم} {همهچیو|همه چیز رو|همه
فیلمهامو} از همینجا بگیرم!|
من {اولین بارم|اولین باره|تازه} که {به|توی|وارد} {این سایت|این وبسایت|کارن مووی|این مرجع} {اومدم|رسیدم|سر زدم|شدم} و {واقعاً|راستش|واقعا} {غافلگیر|متعجب|شگفتزده|سورپرایز} شدم؛ {آرشیو|کالکشن|مجموعه|بانک} {فیلمها|سریالها|آثار|محتوا} {خیلی|واقعاً|واقعا|بهشدت} {کامل|غنی|جامع|گسترده}ه.
{حتماً|حتما|قطعاً|صددرصد} {بازم|دوباره|هفته بعد} سر میزنم!|
{واقعاً|راستش|واقعا} {تشکر|ممنون|سپاس|مرسی} از {تیم|ادمین|مدیران|گردانندگان|دستاندرکاران} {کارن مووی|این سایت|سایت}!
{معرفی|نقد|بررسی|تحلیل} {فیلمها|سریالها|آثار} {طوری|جوری|به شکلی} {انجام میشه|نوشته میشه|هست} که {بدون
اسپویل|بدون لو رفتن داستان|بدون خراب
کردن فیلم} {میفهمی|متوجه میشی|میفهمم}
{فیلم|سریال|اثر} {ارزش دیدن|لیاقت تماشا|ارزش
دانلود} رو داره یا نه. {آفرین|دمتون گرم|دستتون درد نکنه}!|
{بعضی|خیلی از|اکثر|متأسفانه بیشتر} {سایتهای|مرجعهای|وبسایتهای}
{فیلم|دانلود|فیلم و سریال} {پر از|مملو از|سرشار از} {تبلیغات|پاپآپ|لینکهای فیک|تبلیغات مزاحم} {هستن|هستند|ان} ولی {کارن مووی|این سایت|اینجا|سایت شما} {واقعاً|راستش|واقعا} {تمیز|بدون مزاحمت|راحت|خلوت} {کار میکنه|طراحی شده|است|هست}.
{برای همین|به همین دلیل|به خاطر همین} {توی|در|تو} {گروه|چت|کانال|جمع} {دوستام|دوستانم|فامیلمون|رفقا} {معرفیش|معرفیتون|معرفیش} کردم!|
{سلام|درود|هی}، {فقط|فقط اومدم|فقط سر زدم} بگم {نقد فیلمی|معرفی سریالی|تحلیلی|بررسیای} که {گذاشتید|نوشتید|منتشر کردید|زدید} {واقعاً|راستش|واقعا} {عالی|جذاب|خواندنی|دقیق|حرفهای}
بود. {خیلی کم|کم|به ندرت} {جاها|سایتها|مرجعها|رسانهها} {اینقدر|اینقدر|به این صورت} {مفصل|عمیق|حرفهای|با سلیقه} درباره {فیلم|سینما|سریال|هنر هفتم} {مینویسن|مینویسند|صحبت میکنن}.
{ادامه بدید|دستتون درد نکنه|ای کاش
بیشتر بنویسید}!|
من {معمولاً|همیشه|اغلب|اکثر مواقع} {قبل
از|پیش از} {دانلود|تماشای|دیدن} {فیلم|سریال} اول {نقد|معرفی|خلاصه|امتیاز|نظرات}ش رو توی {کارن
مووی|این سایت|اینجا|سایت شما} {میخونم|چک میکنم|میبینم|بررسی میکنم}؛ {راستش|واقعاً|صادقانه بگم} {تا حالا|تاکنون|تاحالا} {بد|نادرست|غلط|اشتباه} راهنماییم نکرده.
{ممنون|مرسی|سپاس} بابت {محتوای|اطلاعات|کار|خدمات} {خوبتون|مفیدتون|ارزشمندتون}!|
{چقدر|چه} {خوب|عالی|جذاب|خوشحالکننده}
که یه {سایت|مرجع|منبع|وبسایت} {فارسی|ایرانی|فارسیزبان} {هست|پیدا شد|وجود داره} که {همزمان|با هم|یکجا} {فیلم|سریال|
https://Ko.Savefrom.net says:
Następnie wróć do getmyfb.com i wklej link w polu tekstowym na stronie głównej.
https://sunwin3.biz/ says:
Hi there this is kind of of off topic but I was wondering
if blogs use WYSIWYG editors or if you have to manually
code with HTML. I’m starting a blog soon but have no coding expertise
so I wanted to get guidance from someone with experience.
Any help would be enormously appreciated!
Atomxtech says:
Greetings from Ohio! I’m bored at work so I decided to browse your website on my iphone during lunch break.
I love the info you provide here and can’t wait to take a look when I get home.
I’m surprised at how fast your blog loaded on my mobile ..
I’m not even using WIFI, just 3G .. Anyhow,
good site!
реальный порно чат says:
You stated it fantastically!
PG88 says:
You actually make it seem so easy with your presentation but I find this matter to be actually something that I think I would never understand.
It seems too complicated and very broad for me. I’m looking forward for your next post, I’ll try
to get the hang of it!
https://kition.mhl.tuc.gr/osvaldojager9 says:
Основой любого долговечного частного жилья является качественный фундамент, для создания которого оптимально подходят заводские винтовые и железобетонные сваи. Современный подход к загородной недвижимости включает в себя не только профессиональный монтаж новых оснований, но и услуги по сохранению уже готовых строений, в том числе их технологичный перенос на другое место. Использование проверенных материалов и передовых строительных решений позволяет сохранить комфорт домашнего очага и обеспечить максимальную устойчивость любой постройки.
My homepage :: https://www.pxinfos.fr/author/rhondastephens/
https://www.chenisgod.com:3096/vernratten7060 says:
Основой любого долговечного частного жилья является качественный фундамент, для создания которого оптимально подходят заводские винтовые и железобетонные сваи. Современный подход к загородной недвижимости включает в себя не только профессиональный монтаж новых оснований, но и услуги по сохранению уже готовых строений, в том числе их технологичный перенос на другое место. Использование проверенных материалов и передовых строительных решений позволяет сохранить комфорт домашнего очага и обеспечить максимальную устойчивость любой постройки.
Feel free to visit my web page; https://git.ellinger.eu/alinebrumby24
https://exploringthisrock.com/author-profile/robtpawsey5500/ says:
Основой любого долговечного частного жилья является качественный фундамент, для создания которого оптимально подходят заводские винтовые и железобетонные сваи. Современный подход к загородной недвижимости включает в себя не только профессиональный монтаж новых оснований, но и услуги по сохранению уже готовых строений, в том числе их технологичный перенос на другое место. Использование проверенных материалов и передовых строительных решений позволяет сохранить комфорт домашнего очага и обеспечить максимальную устойчивость любой постройки.
Take a look at my website – https://coinperia.com/author/hassie09t63830/?profile=true
https://mansionia.com/author/juniorshoebrid/ says:
Основой любого долговечного частного жилья является качественный фундамент, для создания которого оптимально подходят заводские винтовые и железобетонные сваи. Современный подход к загородной недвижимости включает в себя не только профессиональный монтаж новых оснований, но и услуги по сохранению уже готовых строений, в том числе их технологичный перенос на другое место. Использование проверенных материалов и передовых строительных решений позволяет сохранить комфорт домашнего очага и обеспечить максимальную устойчивость любой постройки.
Feel free to surf to my web blog; http://www.kuiwisen.asia/dellricketts97
https://greaterpensacolaparents.com/author-profile/janinehoule748/ says:
Основой любого долговечного частного жилья является качественный фундамент, для создания которого оптимально подходят заводские винтовые и железобетонные сваи. Современный подход к загородной недвижимости включает в себя не только профессиональный монтаж новых оснований, но и услуги по сохранению уже готовых строений, в том числе их технологичный перенос на другое место. Использование проверенных материалов и передовых строительных решений позволяет сохранить комфорт домашнего очага и обеспечить максимальную устойчивость любой постройки.
Here is my web-site: https://git.vycsucre.gob.ve/macmontemayor
https://csvip.me/erwinwilshire says:
Основой любого долговечного частного жилья является качественный фундамент, для создания которого оптимально подходят заводские винтовые и железобетонные сваи. Современный подход к загородной недвижимости включает в себя не только профессиональный монтаж новых оснований, но и услуги по сохранению уже готовых строений, в том числе их технологичный перенос на другое место. Использование проверенных материалов и передовых строительных решений позволяет сохранить комфорт домашнего очага и обеспечить максимальную устойчивость любой постройки.
https://gitea.pudong.online:8880/madonnacarden1
https://photos.apdin.com/lashawndawilbu says:
Основой любого долговечного частного жилья является качественный фундамент, для создания которого оптимально подходят заводские винтовые и железобетонные сваи. Современный подход к загородной недвижимости включает в себя не только профессиональный монтаж новых оснований, но и услуги по сохранению уже готовых строений, в том числе их технологичный перенос на другое место. Использование проверенных материалов и передовых строительных решений позволяет сохранить комфорт домашнего очага и обеспечить максимальную устойчивость любой постройки.
https://www.canadiannewcomerjobs.ca/companies/museum-design/
kra14 at says:
Have you ever considered about including a little bit more than just your articles?
I mean, what you say is important and everything.
But think of if you added some great photos or video clips to give your posts more, “pop”!
Your content is excellent but with images and video clips, this website could definitely
be one of the very best in its niche. Superb blog!
site link says:
I’ve been browsing online more than three hours today,
yet I never found any interesting article like yours. It is pretty worth enough for me.
In my opinion, if all site owners and bloggers made good content
as you did, the web will be much more useful than ever before.
Кракен маркет - Полный обзор Кракен маркет в 2026: категории товаров и продавцы says:
Почему пользователи выбирают площадку KRAKEN?
Маркетплейс KRAKEN заслужил доверие многочисленной аудитории благодаря сочетанию
ключевых факторов. Во-первых, это широкий
и разнообразный ассортимент,
представленный сотнями продавцов.
Во-вторых, интуитивно понятный интерфейс
KRAKEN, который упрощает навигацию,
поиск товаров и управление заказами даже
для новых пользователей. В-третьих, продуманная система безопасных транзакций, включающая
механизмы разрешения споров (диспутов) и возможность использования условного депонирования, что минимизирует риски для обеих сторон сделки.
На KRAKEN функциональность сочетается с внимательным отношением к безопасности клиентов, что делает процесс покупок более предсказуемым, защищенным и, как следствие, популярным среди пользователей,
ценящих анонимность и надежность.
Best Digital marketing says:
Improve your digital reach with Best Digital marketing strategies created to convert valuable customers.
https://miduohuyu.com/vernitaaddis2 says:
Основой любого долговечного частного жилья является качественный фундамент, для создания которого оптимально подходят заводские винтовые и железобетонные сваи. Современный подход к загородной недвижимости включает в себя не только профессиональный монтаж новых оснований, но и услуги по сохранению уже готовых строений, в том числе их технологичный перенос на другое место. Использование проверенных материалов и передовых строительных решений позволяет сохранить комфорт домашнего очага и обеспечить максимальную устойчивость любой постройки.
https://suayna.com/profile/abemeeson4353
Https://fr.Savefrom.net/21-youtube-To-mp4-195VE.html says:
But if you have used Tiktok before, are you willing to download the TikTok videos?
avia master says:
Kick off with us and burrow into the entire avia master gallery of casino games to pick through.
Wall says:
Cabinet IQ
8305 Ѕtate Hwy 71 #110, Austin,
TX 78735, United Ѕtates
254-275-5536
Wall
Learn More says:
Hey I know this is off topic but I was wondering if you knew of any widgets I could add to
my blog that automatically tweet my newest twitter updates.
I’ve been looking for a plug-in like this for quite some
time and was hoping maybe you would have some experience with
something like this. Please let me know if you run into anything.
I truly enjoy reading your blog and I look forward
to your new updates.
ofertas da Slott says:
Ganhei um bom prémio hoje no slottcasino, recomendo!
https://www.hellobarnala.com/author/jewellbillings/
pokerrooms4us.com says:
Aw, this was a very nice post. Finding the time and
actual effort to create a top notch article… but what can I say… I put things off
a lot and don’t manage to get nearly anything done.
https://slots-islands.co.uk/ says:
Before using any online casino in the UK, I would first check the terms, payments and limits. Comparing several platforms before choosing makes more sense.
Also visit my page – https://slots-islands.co.uk/
bitcasinos.net says:
Hi, its pleasant paragraph regarding media print, we all
be aware of media is a great source of data.
informations sur les bonus says:
Les bonus disponibles sur Slott ont des conditions de mise correctes.
https://tugpslatino.ca/author/evesierra0651/
web page says:
Hi there would you mind sharing which blog platform you’re using?
I’m looking to start my own blog in the near future but I’m having a difficult time deciding between BlogEngine/Wordpress/B2evolution and Drupal.
The reason I ask is because your layout seems different then most blogs and I’m looking for something unique.
P.S My apologies for being off-topic but I had to ask!
https://naobet-casino.com/ says:
Ich denke, man sollte sich bei der Wahl einer Casino-Plattform nicht hetzen lassen! Limits, Zahlungen, Regeln und Kontrolltools sollte man zuerst prüfen.
My homepage: https://naobet-casino.com/
selezione di giochi da casino says:
La piattaforma Slott accetta anche depositi in criptovalute?
https://remnanthouse.tv/@terriehalloran?page=about
informazioni sulle percentuali RTP says:
Gioco sempre al casino Slott quando ho un momento libero.
https://pressinaction.gr/author-profile/lynettebeaudoi/
https://sportgalax.com/read-blog/10775 says:
Find your favorite virtual games and explore exciting new releases updated weekly. Benefit from state-of-the-art encryption that keeps your personal details strictly confidential. Spin, play, and win in a digital space built for true enthusiasts.
Feel free to surf to my blog post :: https://sportgalax.com/read-blog/10775
https://www.anadolukobi.web.tr/blogs/7771/El-papel-de-la-sostenibilidad-y-el-juego-tico-en says:
Looking for a trusted place to enjoy cards, roulette, and spinning reels? We deliver an optimized gaming experience featuring round-the-clock assistance and generous rewards. Sign up to unlock endless entertainment with verified fair play.
Also visit my web-site :: https://www.anadolukobi.web.tr/blogs/7771/El-papel-de-la-sostenibilidad-y-el-juego-%C3%A9tico-en
https://face.spartdino.net/blogs/141756/La-Influencia-de-la-Realidad-Virtual-en-el-Casino-Online says:
Looking for a trusted place to enjoy cards, roulette, and spinning reels? We deliver an optimized gaming experience featuring round-the-clock assistance and generous rewards. Sign up to unlock endless entertainment with verified fair play.
My web site – https://face.spartdino.net/blogs/141756/La-Influencia-de-la-Realidad-Virtual-en-el-Casino-Online
https://globbook.com/blogs/76055/The-Role-of-Artificial-Intelligence-in-Responsible-Gambling-Innovations-and says:
Find your favorite virtual games and explore exciting new releases updated weekly. Benefit from state-of-the-art encryption that keeps your personal details strictly confidential. Spin, play, and win in a digital space built for true enthusiasts.
Also visit my page – https://globbook.com/blogs/76055/The-Role-of-Artificial-Intelligence-in-Responsible-Gambling-Innovations-and
tripscan официальный says:
I blog often and I really thank you for your information. Your article has really peaked my interest.
I am going to book mark your blog and keep checking for new information about once a week.
I opted in for your RSS feed too.
digitalxstream.com says:
I like what you guys are usually up too. This type of clever work and exposure!
Keep up the good works guys I’ve included you guys
to blogroll.
Kasyna z minimalnym depozytem says:
Kasyno Unusually bez Depozytu za Rejestracje to jedna z najbardziej popularnych visualize promocji oferowanych przez legalne platformy hazardowe online.
Tego typu gratuity pozwala nowym uzytkownikom rozpoczac gre bez koniecznosci
wplacania wlasnych srodkow na konto. Wystarczy zazwyczaj zalozenie konta oraz spelnienie okreslonych
warunkow regulaminowych, aby otrzymac darmowe srodki lub darmowe obroty na wybranych automatach.
Dla wielu graczy jest to atrakcyjna mozliwosc sprawdzenia funkcji kasyna bez ponoszenia
dodatkowych kosztow.
Kasyna z minimalnym depozytem says:
Kasyno Extra bez Depozytu za Rejestracje to jedna z najbardziej popularnych
visualize promocji oferowanych przez legalne platformy hazardowe online.
Tego typu keepsake of comprehension pozwala nowym uzytkownikom rozpoczac gre bez koniecznosci wplacania wlasnych srodkow
na konto. Wystarczy zazwyczaj zalozenie konta oraz spelnienie okreslonych warunkow regulaminowych, aby otrzymac darmowe srodki
lub darmowe obroty na wybranych automatach. Dla wielu graczy jest to atrakcyjna mozliwosc sprawdzenia
funkcji kasyna bez ponoszenia dodatkowych kosztow.
Aplikacja online kasyno says:
Kasyno Perk bez Depozytu za Rejestracje to jedna z najbardziej popularnych visualize promocji oferowanych przez legalne platformy hazardowe online.
Tego typu douceur pozwala nowym uzytkownikom rozpoczac gre bez koniecznosci wplacania wlasnych srodkow na konto.
Wystarczy zazwyczaj zalozenie konta oraz
spelnienie okreslonych warunkow regulaminowych, aby otrzymac darmowe
srodki lub darmowe obroty na wybranych automatach. Dla wielu graczy jest to atrakcyjna mozliwosc sprawdzenia funkcji kasyna bez ponoszenia dodatkowych kosztow.