
就如同各位從零開始的夥伴們,你們一定很想快點看到,一台可以裝上雷射LiDAR導航,自主漫遊 + 路徑規劃 + 自主避障 + 影像AI &^$%^#%%^%^&%^ ~ 等等集合了目前self-driving 前端科技的家用小車八 !! 我們記錄一位工程師,他是如何從零開始的學習、蛻變到一位 self-driving developer的過程。
話說,這一開始的動作應該也是記錄摸索的過程,不過,這卻是最真實的、殘酷與慘痛代價的經驗。希望這些記錄可以減少後面跟進的學習者們寶貴的時間。
0-1、如何接近ROS ?
在此先定義這個初階段的學習標的 :
- 遠端遙控機器人
- LiDAR雷達建地圖
- 自主導航與避障
- 路徑規劃 (到這 ~ 基本該會的操作都已經具備了)
我們就從 “ROS遠端遙控機器人” 開始吧 !
0-2、遠端遙控之系統架構
使用裝備 :
- ACER i5 筆電 win10系統
- 樹梅派 Pi4 B (2020 年最新版)
測試架構 :
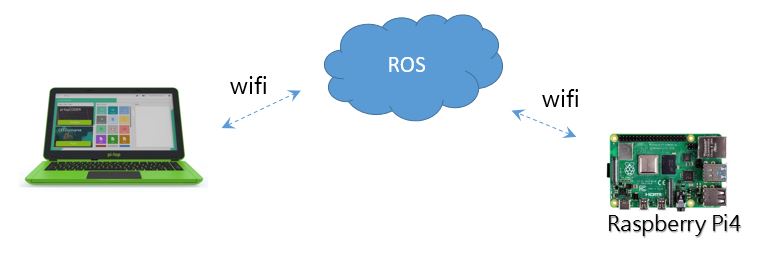
筆電端 : 經過資料蒐集與無數次的誤打誤撞後,決定灌 VM 走 ROS Melodic Morenia。參考以下
官網資訊說明 Melodic 是最新持續update。
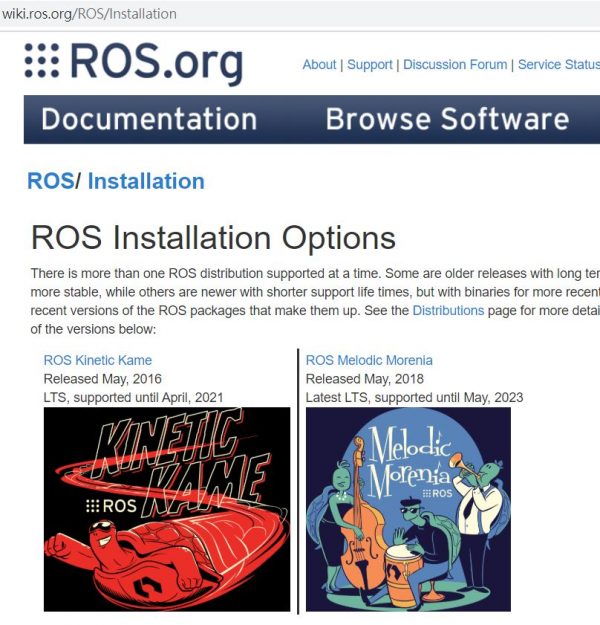
根據官網說法,
“ROS Melodic installation instructions
These instructions will install the ROS Melodic Morenia distribution, which is available for Ubuntu Artful (17.10), Bionic (18.04 LTS) and Debian Stretch, among other platform options.
0-3、win10 筆電安裝VM (虛擬機)進行ubuntu環境安裝
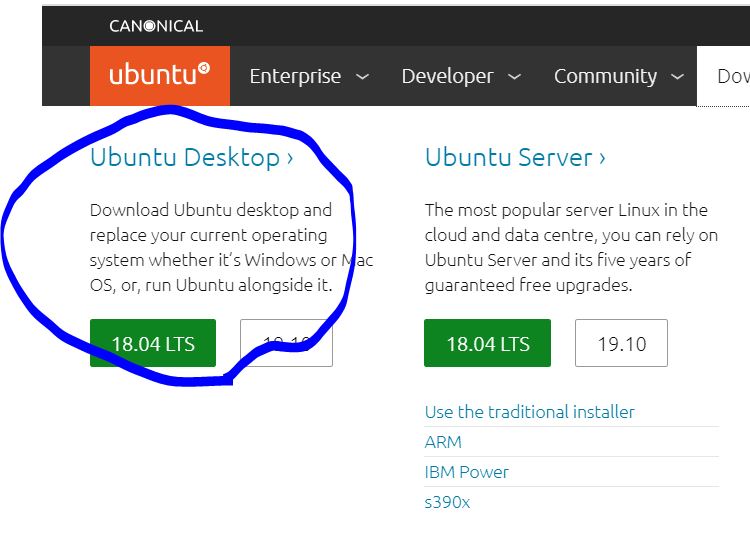
我們決定先用PC安裝VM環境,如下 :
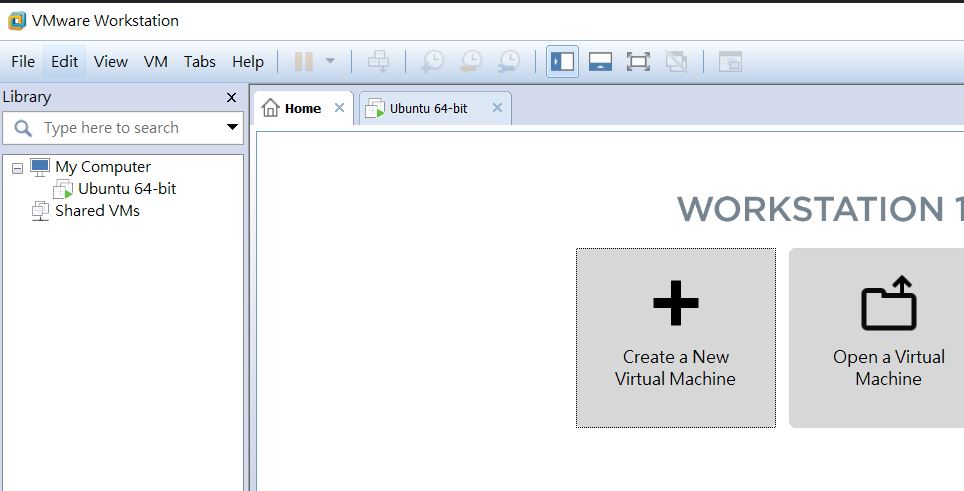
到Ubuntu官網下載 18.04LTS 印像檔 (ubuntu-18.04.3-desktop-amd64.iso ) , 約2.3G 下載時間約需 40分。
到VM中,點選 “Create a New Virtual Machine” ,一個按鍵可以安裝完成Ubuntu 18.04系統。不過系統安裝時間也約需40分鐘。
0-4、安裝 ROS Melodic Morenia
請到ROS官網,按照步驟操作 :
1. Configure your Ubuntu repositories
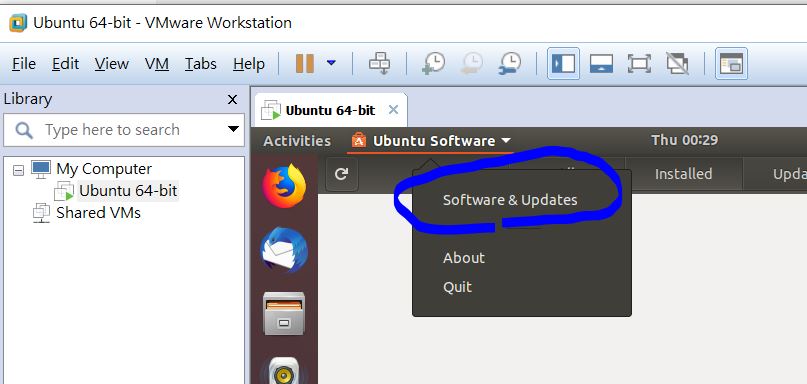
按照下面的選項, “source code” 要勾一下,下載地點可依據下拉選單,選擇 “Select Best Server”,系統會自動去測試哪個server下載比較快。


選完下載伺服器後,點 “close”,接著會問是否要更新清單,選 “Reload” 來更新倉庫清單。
Select “Close” to save your changes. A dialog box should appear, asking whether you’d like to update the list of repositories. Select “Reload” to update the list.

接著在 Alt+Ctrl照做以下動作。 refer to : http://wiki.ros.org/melodic/Installation/Ubuntu
Setup your sources.list
Setup your computer to accept software from packages.ros.org.
-
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
|
Source Debs are also available |
Set up your keys
-
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
If you experience issues connecting to the keyserver, you can try substituting hkp://pgp.mit.edu:80 or hkp://keyserver.ubuntu.com:80 in the previous command.
Alternatively, you can use curl instead of the apt-key command, which can be helpful if you are behind a proxy server:
-
curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
Installation
First, make sure your Debian package index is up-to-date:
-
sudo apt update
There are many different libraries and tools in ROS. We provided four default configurations to get you started. You can also install ROS packages individually.
In case of problems with the next step, you can use following repositories instead of the ones mentioned above ros-shadow-fixed
-
-
Desktop-Full Install: (Recommended) : ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators and 2D/3D perception
-
sudo apt install ros-melodic-desktop-full
or click here
Desktop Install: ROS, rqt, rviz, and robot-generic libraries (~ 我們這裡用這個 ~ 耗時30分)
-
sudo apt install ros-melodic-desktop
or click here
ROS-Base: (Bare Bones) ROS package, build, and communication libraries. No GUI tools.
-
sudo apt install ros-melodic-ros-base
or click here
Individual Package: You can also install a specific ROS package (replace underscores with dashes of the package name):
-
-
sudo apt install ros-melodic-PACKAGE
e.g.
sudo apt install ros-melodic-slam-gmapping
-
To find available packages, use:
apt search ros-melodic
Environment setup
It’s convenient if the ROS environment variables are automatically added to your bash session every time a new shell is launched:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc source ~/.bashrc
To install this tool and other dependencies for building ROS packages, run:
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
Initialize rosdep
Before you can use many ROS tools, you will need to initialize rosdep. rosdep enables you to easily install system dependencies for source you want to compile and is required to run some core components in ROS. If you have not yet installed rosdep, do so as follows.
sudo apt install python-rosdep
With the following, you can initialize rosdep.
sudo rosdep init rosdep update
到此為止,ROS算是安裝完成了。
Bradleysab says:
order stromectol https://stromectolivermectin19.com/# stromectol 3 mg price
ivermectin topical
Johnnieglymn says:
cost of ivermectin pill ivermectin for sale – ivermectin price comparison
Johnnieglymn says:
cost of ivermectin stromectol for sale – ivermectin 3 mg
RodneyLycle says:
order medication from india online pharmacy – india pharmacies shipping to usa
RodneyLycle says:
ivermectin lice ivermectin 3 mg tablet dosage – ivermectin 2ml
RodneyLycle says:
ivermectin buy nz stromectol drg – buy ivermectin
RodneyLycle says:
medstore online pharmacy canada pharmacy safedrg – northwest pharmacy canada
RodneyLycle says:
best ed pills non prescription pet meds without vet prescription canada – cheap pet meds without vet prescription
RodneyLycle says:
buy prescription drugs without doctor drugs without doctor canadadrg – ed drugs online from canada
RodneyLycle says:
canadian online drugstore buy canadian drugs – best online canadian pharmacy
Clintonginty says:
prednisone 40 mg price buy prednisone – prednisone drug costs
Clintonginty says:
generic zithromax medicine buy zithromax 1000mg online – where to get zithromax over the counter
Clintonginty says:
hydroxychloroquine brand name hydroxychloroquine canada – generic plaquenil prices
Clintonginty says:
hydroxychloroquine chloroquine generic plaquenil online – hydroxychloroquine virus
Clintonginty says:
zithromax 250 price cheap zithromax – zithromax online no prescription
Clintonginty says:
prednisone over the counter south africa generic prednisone without dr prescription – prednisone 10
DavidseN says:
cialis online canada ripoff buy cialis no prescription
DavidseN says:
generiac cialis overnight pharmacy 4u cialis
Jerryalali says:
ivermectin for sale ivermectin human
Jerryalali says:
ivermectin 3 mg tabs stromectol over the counter
AndreDroro says:
cialis vs viagra viagra from canada
AndreDroro says:
generic viagra 100mg viagra dosage
AndreDroro says:
discount cialis dapoxetine/cialis
AndreDroro says:
get online cialis without prescription overnight cialis viagra levitra young yahoo
AndreDroro says:
free viagra buy viagra professional
AndreDroro says:
ivermectin canada ivermectin 6 mg tablets
AndreDroro says:
when should you take cialis cialis dosage for women
AndreDroro says:
plaquenil 200 cost plaquenil tablets 200mg
AndreDroro says:
purchase ivermectin stromectol tablets for humans
DavidChich says:
buy wellbutrin in australia wellbutrin xl – wellbutrin xr
DavidChich says:
nolvadex for sale nolvadex generic – nolvadex side effects
DavidChich says:
ventolin for sale uk ventolin generic – cheapest ventolin online uk
DavidChich says:
wellbutrin 300 mg buy wellbutrin – how much is wellbutrin
DavidChich says:
wellbutrin 300 mg generic wellbutrin – buying wellbutrin online
DavidChich says:
wellbutrin 150mg price generic wellbutrin – wellbutrin generic cost
DavidChich says:
cheap ventolin buy ventolin – ventolin tablet 4mg
DonaldMum says:
amoxil generic drugs online buy pills online cheap doxycycline generic ed pills from canada
DonaldMum says:
lasix cheap generic drugs from india cheap generic drugs from india cipro cheap generic pills
DonaldMum says:
cipro generic ed pills from canada cheap generic pills cipro buy generic drugs online
Richardlalty says:
https://iverstrom24.online/# stromectol 3mg tablets
Richardlalty says:
https://ciatad24.com/# normal dosage of cialis
Richardlalty says:
http://viasild24.online/# sildenafil 20 mg tablet uses
Richardlalty says:
https://iverstrom24.com/# dose for stromectol
james marty says:
I read this paragraph completely about the comparison of newest and previous technologies,it’s amazing article.
Richardlalty says:
http://iverstrom24.com/# what is stromectol
Richardlalty says:
https://iverstrom24.online/# what does stromectol treat
judi slot online says:
Really enjoyed this blog. Want more.
Richardlalty says:
http://iverstrom24.com/# stromectol ivermectin dosage
Stevensek says:
http://plaquenils.com/ plaquenil 400 mg daily
Stevensek says:
http://baricitinibrx.com/ covid treatment baricitinib
Stevensek says:
https://baricitinibrx.com/ baricitinib eua fact sheet
bonjur says:
tamoxifen and osteoporosis startqyy – tamoxifen breast cancer
Stevensek says:
https://stromectols.com/ cost of ivermectin 1% cream
breast licking says:
Thank you ever so for you blog post.Really thank you!
corporate secretary singapore says:
https://firsturl.de/sB1qP2c Tattoo Artists
Stevensek says:
http://stromectols.com/ stromectol ivermectin
Stevensek says:
http://bimatoprostrx.com/ bimatoprost generic best price
AAA garage service pros says:
Hey, thanks for the article.Much thanks again. Cool.
Stevensek says:
http://stromectols.com/ ivermectin cream
weight loss supplements pcos says:
Appreciate you sharing, great article post. Really Cool.
MichaelHip says:
gilllm https://stromectolr.com ivermectin buy nz
MichaelHip says:
wvevom https://stromectolr.com ivermectin 400 mg brands
MichaelHip says:
sfjvnw https://stromectolr.com ivermectin 500ml
MichaelHip says:
plaquenil depression hydroxychloroquine news plaquenil 200 mg 60 tab
ybekpx
free books for kindle says:
This is one awesome blog post. Fantastic.
marketing cbd says:
Heya i am for the first time here. I found this board and I find It really useful & it helped me out much.I hope to give something back and aid others like youhelped me.My blog: ACV Rx Reviews
concrete painting canberra says:
I truly appreciate this blog article. Keep writing.
see the website says:
ivermectin 10 ml – ivermectin generic name generic name for ivermectin
Christmas says:
Im obliged for the blog article.Really looking forward to read more. Awesome.
elite power cbd gummies reviews canada says:
I loved your post.Thanks Again. Keep writing.
how does una patches work says:
Great post.Thanks Again. Much obliged.
belly fat burner exercise belt says:
This is one awesome blog article.Much thanks again. Keep writing.
Kiawed says:
75 mg sildenafil
Carlwed says:
where can i get cialis in singapore
Amywed says:
cialis soft tabs uk
Chelsea Manhattan says:
I really liked your post.Really looking forward to read more. Fantastic.
Boowed says:
buy cheap viagra online canada
Teowed says:
online viagra order india
Zakwed says:
buy cialis online cheap india
Ashwed says:
best price on cialis
Judywed says:
cialis us pharmacy
Ashwed says:
generic drug for viagra
Tedwed says:
stromectol tablet 3 mg
Kiawed says:
cialis 10mg coupon
Wimwed says:
cheap sildenafil 50mg uk
Ugowed says:
sildenafil 20 mg buy online
Yonwed says:
buy cymbalta 30mg
Judywed says:
generic paroxetine in mexico
รวม สล็อต เว็บ ตรง says:
I really liked your article post.Thanks Again.
Amywed says:
furosemide order online
Teowed says:
order lisinopril online us
Paulwed says:
600mg bupropion
Lisawed says:
furosemide 40 mg buy online
Tedwed says:
gabapentin 300 mg capsule
Marywed says:
finasteride 5mg
portable air conditioner malaysia says:
Howdy! I just wish to give a huge thumbs up for the good information you will have here on this post.I will likely be coming again to your blog for extra soon.
Amywed says:
dexona 4mg tablet online
Ugowed says:
kamagra online fast delivery
Markwed says:
cost viagra per pill
Kiawed says:
aurogra 100 uk
Boowed says:
cialis buy online
Kiawed says:
finpecia 1 mg
Judywed says:
prednisone 10mg buy online
which crypto to invest in says:
It was hard It was hard to get a grip on everything, since it was impossible to take in the entire surroundings of scenes.
Zakwed says:
atarax 25 mg price in india
Ashwed says:
sildenafil 10 mg cost
Markwed says:
nolvadex australia pharmacy
Ugowed says:
brand cialis 20 mg
Teowed says:
furosemide generic
Yonwed says:
sildenafil where to get
สล็อต เว็บ ตรง ไม่ ผ่าน เอเย่นต์ ไม่มี ขั้น ต่ํา says:
I think this is a real great post.Much thanks again.
Lisawed says:
sildenafil 100mg purchase
Ugowed says:
tadalafil tablets canada
Paulwed says:
modafinil uk prescription
https://snaptiktok.org says:
This is one awesome blog post.Really thank you! Awesome.
Carlwed says:
where can i buy over the counter generic viagra
ทางเข้าambbet says:
Great post.Much thanks again.
Carlwed says:
where can i buy cialis tadalafil in edmonton
Carlwed says:
discount cialis online
Teowed says:
cialis capsule
Kiawed says:
sildenafil buy canada
Wimwed says:
real female viagra
Marywed says:
viagra comparison prices
Tedwed says:
cialis 5mg online australia
Marywed says:
ivermectin coronavirus
Wimwed says:
ivermectin lotion price
Judywed says:
ivermectin new zealand
Ugowed says:
how much is nolvadex in australia
roofing contractor Chevy Chase says:
Say, you got a nice post.Much thanks again. Much obliged.
Yonwed says:
nolvadex tablets for sale
Boowed says:
nolvadex purchase online
Zakwed says:
plaquenil brand coupon
Markwed says:
cleocin 150 mg cap
Amywed says:
plavix 75 mg tablet price in india
Lisawed says:
tetracycline price in canada
Amywed says:
celexa online pharmacy
Judywed says:
buy buspar online no prescription
Ugowed says:
indocin 50 mg
Yonwed says:
pharmacy express
Ashwed says:
nolvadex over the counter
Judywed says:
modafinil 100 mg tablet
Tedwed says:
price of augmentin
Ugowed says:
orlistat 84
Lisawed says:
reputable overseas online pharmacies
Teowed says:
buy avodart online canada
Kiawed says:
price cialis uk
Marywed says:
provigil 200 mg
Paulwed says:
priligy australia cost
Lisawed says:
stromectol 12mg
Markwed says:
prednisolone buy online uk
06239.com.ua says:
Terrific forum posts, Kudos!college entry essay prompts writing my essay pay for freelance writers
Judywed says:
cost of benicar 20mg
Carlwed says:
dipyridamole 200 mg capsules
Amywed says:
fluoxetine prescription cost
Boowed says:
zithromax 250 mg
Judywed says:
female viagra online uk
Yonwed says:
buy gabapentin online usa
Tedwed says:
tretinoin 0.025 cream cost
Carlwed says:
average cost of cialis prescription
Ashwed says:
where to get cialis in canada
Kiawed says:
viagra singapore over the counter
Amywed says:
tadalafil 20 mg tablet price
Zakwed says:
cost of stromectol medication
Ugowed says:
provigil india
Wimwed says:
cialis 10mg online india
Boowed says:
tadalafil tablets 20 mg price
Lisawed says:
generic provigil prices
Markwed says:
budecort
Lisawed says:
modafinil pills online
glucofort reviews says:
Thanks a lot for the blog.Much thanks again. Really Cool.
Tedwed says:
retino 0.025 cream
Kiawed says:
generic cialis 100mg
Yonwed says:
sildenafil 30 mg
does exodus effect really work says:
Very good blog article.Much thanks again. Cool.
Marywed says:
cytotec singapore
song download mp3 juice says:
I really like and appreciate your blog article.Really looking forward to read more. Fantastic.
Judywed says:
cialis generic tadalafil
Boowed says:
accutane price in canada
download video tiktok says:
Awesome blog.Really thank you! Great.
เว็บสล็อต แตกง่าย สล็อตเว็บตรง says:
Looking forward to reading more. Great article post.Much thanks again. Cool.
Amywed says:
abilify 0.5 mg
Zakwed says:
buy aurogra 100
Ashwed says:
prednisone cost 5mg
Paulwed says:
viagra online europe
Carlwed says:
where can i buy over the counter viagra
Zakwed says:
how to get cialis in canada
Kiawed says:
antabuse uk online
Kiawed says:
ivermectin cost in usa
Teowed says:
ivermectin 9 mg tablet
does nuubu patches work says:
Thank you ever so for you blog.Really thank you! Great.
Paulwed says:
tadalafil generic cialis
SEO Service Berlin says:
Say, you got a nice article post. Keep writing.
Markwed says:
ivermectin 8000 mcg
Teowed says:
sildenafil citrate tablets ip 100 mg
6.5 prc ammo sale says:
Muchos Gracias for your blog post.Much thanks again. Really Cool.
twrecoverytools.com says:
Amazing. You aren’t so good that will you’re so good at this time. Your help woke me up. Thank you extremely much.
Clit Vibrator says:
Really informative article post.Thanks Again. Will read on…
Amywed says:
sildenafil 40 mg
Lifelike Dildo says:
Thanks a lot for the blog post.Really thank you! Really Great.
Realistic Pocket Masturbator says:
Thanks again for the blog.Thanks Again. Really Great.
Judywed says:
aralen 500
Marywed says:
buy ivermectin
Adam and Eve Anal Butt Plugs says:
Thanks for the blog post.Much thanks again. Keep writing.
Bullet Vibrator says:
I think this is a real great blog post.Much thanks again. Really Cool.
Ashwed says:
how much does ivermectin cost
have a look at says:
Hello There. I found your blog the use of msn. That is an extremely smartly written article.I’ll be sure to bookmark it and return to learn extra of your useful info.Thanks for the post. I’ll definitely return.
Yonwed says:
buy tretinoin 1 online
Strap On says:
Thanks for sharing, this is a fantastic blog article. Really Great.
Lisawed says:
plaquenil 20 mg
Prostate Vibrator says:
I really like and appreciate your article.Much thanks again. Awesome.
Paulwed says:
cialis pills order
Marywed says:
fast shipping cialis
Wand Vibrator says:
Awesome blog.Much thanks again. Will read on…
Markwed says:
sildenafil 100mg generic
Carlwed says:
nexium capsules uk
Ugowed says:
how to get metformin uk
Wimwed says:
4004 atarax
for more details says:
I was recommended this blog by my cousin. I’m notsure whether this post is written by him as no one else know such detailed about my difficulty.You’re wonderful! Thanks!
top fake id says:
I am so grateful for your blog.Really looking forward to read more. Awesome.
tuff tiles says:
This is one awesome post. Keep writing.
Teowed says:
can you buy cialis otc in canada
Wimwed says:
tadalafil 5mg daily use
Judywed says:
order sildenafil from canada
Ashwed says:
buy ivermectin
keto strong xp pills review says:
Muchos Gracias for your post.Really looking forward to read more. Really Great.
model railway says:
Thank you ever so for you article.
https://www.jewelleryreflections.com/eternal-appeal-of-gold-rings-2021 says:
It’s truly a great and helpful piece of info. I am glad that you simply shared this helpful info with us. Please stay us informed like this. Thanks for sharing.
Lisawed says:
cost of generic viagra
Markwed says:
cheap cialis online usa
have a peek here says:
I truly appreciate this blog article.Thanks Again. Cool.
Zakwed says:
sildenafil 100mg usa cheap
does shark motion work says:
Thanks a lot for the article.Really thank you! Fantastic.
Kiawed says:
where can you buy cialis online
Boowed says:
tadalafil 20 mg medication
keto strong xp canada reviews says:
I am so grateful for your blog article.Really thank you! Really Great.
Lisawed says:
buy brand viagra online
is hotshot keto scam says:
A round of applause for your article.Much thanks again. Fantastic.
Marywed says:
prednisone 5443
Yonwed says:
buy viagra online india 100mg
Kiawed says:
5mg cialis canadian pharmacy
Business Advisors in Singapore says:
Great, thanks for sharing this post. Will read on…
Teowed says:
stromectol cream
Amywed says:
buy cheap generic viagra uk
Boowed says:
cialis online australia
Carlwed says:
tadalafil
Judywed says:
generic plaquenil pills
most loving pet sitters in boulder colorado says:
I value the blog article.Thanks Again. Great.
Wimwed says:
ivermectin 250ml
Insured Pet sitter boulder says:
Major thankies for the blog article.Thanks Again. Want more.
Ashwed says:
cialis price in usa
Tedwed says:
best mail order pharmacy canada
Yonwed says:
ivermectin tablets uk
Paulwed says:
viagra without script
SUPERSLOT เครดิตฟรี says:
Thanks again for the blog. Much obliged.
Ugowed says:
buy ivermectin online
Awesome Boulder dog walkers says:
Looking forward to reading more. Great article post. Keep writing.
건마 says:
A big thank you for your blog.Thanks Again. Really Cool.
Amywed says:
cialis by mail
건마 says:
This is one awesome blog post.Much thanks again. Will read on…
Marywed says:
buy cheap generic cialis
Brooklyn NY says:
Appreciate you sharing, great blog post.
Paulwed says:
[url=https://genericviagra50withoutrx.monster/]best female viagra over the counter[/url]
Carlwed says:
how to buy cialis
trung tam bao hanh sony says:
The greatest bookmakers will spot your behavior and offer you the ideal bonus for you.
Judywed says:
flagyl 200mg tablets
Boowed says:
can i order viagra
is ezdigest scam says:
Really informative article.Thanks Again. Great.
Teowed says:
cialis 5 mg tablets cost
bum bands review says:
Looking forward to reading more. Great blog post.Thanks Again.
Zakwed says:
best place to buy viagra online
Kiawed says:
buy sildenafil no prescription
is keto burn max scam says:
Thanks for the blog.Much thanks again. Awesome.
gap rewards card login in says:
Hello there, You have done a fantastic job. I will definitely digg it and personally suggest to my friends. I’m confident they’ll be benefited from this web site.
restria reviews says:
Looking forward to reading more. Great post.Thanks Again. Cool.
metrolagu dj says:
Very neat article.Really looking forward to read more. Will read on…
keto burn max uk reviews says:
Thanks so much for the blog article. Really Great.
prolific survey site says:
Very informative blog article.Really looking forward to read more. Great.
autotradegold says:
Appreciate you sharing, great article post.Thanks Again. Fantastic.
Amywed says:
cialis 20 mg price in canada
clit vibrator says:
Im obliged for the blog post.Much thanks again. Cool.
Wimwed says:
viagra in women
g gasm vibrator says:
Thank you for your article. Cool.
Ashwed says:
where to buy ivermectin pills
best male masturbators says:
A round of applause for your blog article.Really thank you! Keep writing.
Tedwed says:
generic cialis 2017
g spot vibrators says:
Awesome blog article.Really thank you! Great.
vibrating rechargeable kegel balls says:
Thanks a lot for the article. Keep writing.
penis pumps says:
Fantastic blog article.Really looking forward to read more. Awesome.
https://www.jjstoysmore.com says:
This is a topic that’s close to my heart…Thank you! Where are your contact details though?
buy sex toys in canada says:
Say, you got a nice blog article.Thanks Again. Fantastic.
Lisawed says:
200 mg cialis
Markwed says:
average cost of viagra 100mg
PeloDus says:
cialis 500
the thrusting rabbit says:
Major thanks for the blog article.Thanks Again. Awesome.
Boowed says:
cialis 2.5mg
inserting ben wa balls says:
Very neat blog article.Really looking forward to read more. Awesome.
sexy card games for couples says:
Major thankies for the article post. Great.
bondage kit says:
I loved your blog post.Much thanks again. Really Cool.
situs judi bola terbesar di asia says:
Very good article post.Really thank you! Awesome.
realistic giant dildo says:
Wow, great blog article.Really thank you! Much obliged.
robot trading says:
Thanks so much for the post.Really looking forward to read more. Awesome.
agen judi bri says:
I really like and appreciate your article.Really thank you! Really Great.
Kiawed says:
viagra pharmacy usa
is metalean complete scam says:
I really liked your blog article.Really looking forward to read more. Cool.
is blood pressure 911 a scam says:
Thanks so much for the blog. Want more.
Yonwed says:
motrin 3 pills
留学生 代码 代写 says:
Wow, great article post.Really looking forward to read more. Much obliged.
RemoDus says:
cialis 20mg coupon
Markwed says:
pharmacy viagra generic
slot says:
Im obliged for the article.Much thanks again. Fantastic.
Amywed says:
ivermectin lotion price
Palm Beach Roof Wash says:
An interesting discussion is definitely worth comment. I believe that you should write more about this subject, it might not be a taboo matter but usually folks don’t discuss these subjects. To the next! All the best.
Carlwed says:
cialis singapore price
Judywed says:
best price brand viagra
Continued says:
A round of applause for your post.Really thank you! Fantastic.
Lisawed says:
[url=https://exttabs.online/]aleve 240[/url]
portuguese in brazil says:
Can someone recommend Beachwear? Thanks xox
Wimwed says:
stromectol tablets for humans for sale
Paulwed says:
buy generic viagra from europe
does folicrex really work says:
Very neat blog post.Really thank you! Much obliged.
Zakwed says:
sildenafil viagra 100mg
for additional information says:
Hey! I just wanted to ask if you ever have any problems with hackers?My last blog (wordpress) was hacked and I ended up losing several weeksof hard work due to no back up. Do you have any solutions toprotect against hackers?
เว็บตรงสล็อต says:
Looking forward to reading more. Great article post.Really looking forward to read more. Really Great.
Facts says:
Fantastic blog.Really thank you! Cool.
8 inch suction cup dildo says:
I think this is a real great article.Really looking forward to read more. Awesome.
click this over here now says:
best paper writing service pay someone to do my paper
buying guides says:
Appreciate you sharing, great blog article.Really thank you! Great.
Ugowed says:
cost of ivermectin 3mg tablets
Ugowed says:
ivermectin prescription
toys for men says:
Thanks again for the article post.Really thank you! Fantastic.
Judywed says:
where can i get female viagra uk
Marywed says:
best generic viagra in india
Yonwed says:
cialis soft tabs
regal keto reviews says:
I really liked your blog article.Really thank you! Want more.
https://dev.newblood.games/index.php/User:Ali_Oconnor https://www.tuxedo.org/ says:
natural herbs for ed – ed pills over counter little red ed pill
Ugowed says:
ivermectin new zealand
Annawed says:
buy celexa no prescription
wand vibrating massager says:
This is one awesome blog.Really thank you!
Boowed says:
stromectol generic name
Joewed says:
buy metformin 500 mg online
Evawed says:
cialis cost in india
Jackwed says:
viagra canada order
Suewed says:
purchase cialis with paypal
click this says:
WOW just what I was looking for. Came here bysearching for is
Evawed says:
generic lasix
Ugowed says:
cheapest cialis generic
Samwed says:
biaxin for pneumonia
Ivywed says:
fildena price
Nickwed says:
viagra brand price
Boowed says:
price of viagra 100mg uk
Miawed says:
vermox 500g
Top Model Snapchats says:
Hey, thanks for the blog article. Great.
Samwed says:
[url=https://pharmacyonline.quest/]cheapest pharmacy for prescriptions without insurance[/url]
Miawed says:
erectafil 5 mg
Wimwed says:
where to get viagra without prescription
Suewed says:
cost of cialis without prescription
Joewed says:
tadalafil free shipping
Samwed says:
antabuse 125 mg
Annawed says:
cost of 5 mg tadalafil pills
best opensea nft says:
Im grateful for the blog.Much thanks again. Really Cool.
Joewed says:
prazosin 4 g
Ivywed says:
cialis order uk
Nickwed says:
singulair buy
Kimwed says:
cafergot canada
Teowed says:
cialis canada online pharmacy
Samwed says:
how to buy paroxetine
Janewed says:
how to order sildenafil online
Annawed says:
yasmin cost
navigate here says:
Beer Bike offers affordable bikes & scooters for medium to long-term expats in Chiang Mai. The bikes are well-maintained by Gwang & Joe, and if you ask nicely, they’ll even a phone holder to your scooter, which is super useful. Price-wise, the monthly rates start at 1800 in low season and 2000 per month in high season. You can reach them via their Facebook page to check which bikes they currently have available.
find this says:
I’m really impressed with your writing skills as well as with thelayout on your blog. Is this a paid theme or did you modify it yourself?Either way keep up the excellent quality writing,it’s rare to see a nice blog like this one today.
Nickwed says:
offshore pharmacy no prescription
Marywed says:
cialis generic online canada
Kimwed says:
[url=https://benicar.quest/]best price for benicar 40 mg[/url]
Miawed says:
buy yasmin pill usa
Ivywed says:
paxil pill price
Joewed says:
canadian tadalafil online
Markwed says:
viagra for sale online australia
Janewed says:
how to get over the counter viagra
Judywed says:
generic lipitor online
Wimwed says:
viagra 100 mg price canada
Joewed says:
tadalafil buy online canada
Janewed says:
canadian pharmacy cialis 20 mg
Nickwed says:
viagra soft tablets
https://www.babepedia.com/babe/Diana_Doll says:
Thanks for sharing, this is a fantastic blog.Thanks Again. Really Cool.
Evawed says:
metformin 500 mg coupon
Miawed says:
canadian pharmacy cialis
Kimwed says:
otc viagra usa
Markwed says:
how to buy cialis
Joewed says:
generic prazosin
Suewed says:
ivermectin 4000
Jimwed says:
celexa 20 mg cost
Miawed says:
online pharmacy store
Janewed says:
global pharmacy
Judywed says:
best price generic viagra online
เว็บสล็อต says:
I am so grateful for your blog post.Really thank you! Awesome.
Kiawed says:
where can you get women’s viagra
Evawed says:
cialis 20 mg coupon
Ivywed says:
yasmin online pharmacy
Kimwed says:
tadalafil 5mg india
Joewed says:
cost of cialis in mexico
Ashwed says:
online cialis paypal
Jackwed says:
tadalafil 5mg tablets
Miawed says:
5mg tadalafil online
Jimwed says:
propranolol for sale uk
Annawed says:
can you buy female viagra in australia
Jackwed says:
brand cialis online
Janewed says:
buy cialis tablets
Amywed says:
medicine singulair
Suewed says:
trazodone 100 tab
Evawed says:
buy fildena online
Jimwed says:
fildena 120mg
Evawed says:
lipitor online price
Nickwed says:
benicar canada
Nickwed says:
yasmin c
RV And Camper Repair Near Me says:
Thanks for sharing, this is a fantastic article post.Really looking forward to read more. Fantastic.
Ivywed says:
azithromycin 500mg tablets online
Samwed says:
cialis soft tabs generic
Jackwed says:
order ampicillin
Suewed says:
buy tadacip in usa
Jackwed says:
tadalafil 10 mg coupon
buy likes says:
ivermectin topical ivermectin uk coronavirus – ivermectin
Evawed says:
sildenafil 100mg capsule
Kimwed says:
viagra 50mg online india
Ivywed says:
buy ivermectin canada
Annawed says:
discount cialis online
business pest control says:
I truly appreciate this post.Really thank you! Awesome.
Jimwed says:
sildenafil pharmacy australia
Jackwed says:
stromectol tab price
Lisawed says:
cafergot online pharmacy
Miawed says:
cialis 60
Carlwed says:
[url=http://ordersildenafilcitratepills.com/]buy cheapest generic viagra online[/url]
Samwed says:
sildenafil without prescription
Suewed says:
canadian pharmacy drugs online
Janewed says:
where can you buy real generic viagra
Joewed says:
best online foreign pharmacies
Suewed says:
trazodone online uk
Paulwed says:
sildenafil online purchase
Ivywed says:
sildenafil tablets 100mg price
24 hours tyre service says:
Thank you ever so for you article.Really looking forward to read more. Really Cool.
Kiawed says:
sildenafil online pharmacy uk
Annawed says:
paroxetine uk buy
Samwed says:
buy cialis for daily use online
Janewed says:
cheap sildenafil tablets
Ugowed says:
tadalafil soft tablets 20mg
du an thanh long bay says:
You may find two to three new levels inside L . a . Weight loss and any one someone is incredibly important. Initial stage may be real melting away rrn the body. lose weight
Joewed says:
reddit canadian pharmacy
Evawed says:
tadalafil where to get cheap
Ugowed says:
generic viagra 100mg best price
Annawed says:
eli lilly cialis
Wimwed says:
where to buy viagra online canada
Miawed says:
online pharmacy cialis 20 mg
silego says:
Major thanks for the blog post.Thanks Again. Fantastic.
Paulwed says:
celexa prescription cost
mobile car detailing kansas city says:
Thanks-a-mundo for the blog post.Really looking forward to read more. Will read on…
Carlwed says:
erectafil online
IconNicholson says:
Appreciate you sharing, great article.Thanks Again. Much obliged.
Samwed says:
canada pharmacy online legit
Money transfer to nigeria says:
Very neat article post.Thanks Again. Want more.
Kimwed says:
albendazole in canada
Amywed says:
cheap generic cialis canadian pharmacy
See This Website says:
I need to to thank you for this very good read!! I certainly loved every little bit of it. I have you book-marked to check out new stuff you post…
Ivywed says:
where to buy cialis online in usa
Janewed says:
stromectol covid 19
donitasparks.com says:
I cannot thank you enough for the post.Really looking forward to read more. Really Great.
emergency tyres near me says:
This is one awesome blog article.Really looking forward to read more. Awesome.
Annawed says:
where can i get valtrex over the counter
Lisawed says:
where to buy viagra online australia
Evawed says:
ampicillin tablets 500mg
Annawed says:
20mg generic cialis pill
Nickwed says:
sildenafil over the counter india
Annawed says:
cialis 5 mg cost
Jimwed says:
cheap india cialis
slow puncture tyre repair near me says:
Thank you for your blog article.Really thank you! Cool.
Jackwed says:
cheap cialis uk
Kimwed says:
erectafil
Jimwed says:
stromectol prices
Amywed says:
ivermectin 500ml
Nickwed says:
canadian online pharmacy tadalafil
Miawed says:
online pharmacy vermox
Zakwed says:
albendazole 400 mg cost
Tedwed says:
ivermectin usa
Paulwed says:
cialis generic discount
Paulwed says:
generic estrace 0.01 cream
Suewed says:
can i buy viagra in mexico
Boowed says:
how can i get cheap cialis
Ivywed says:
where can i get cialis cheap
Marywed says:
paxil hcl
Janewed says:
buy tadacip 20 mg without prescription
Evawed says:
order generic cialis online canada
Jackwed says:
where to buy generic cialis in usa
Jackwed says:
cialis generic levitra viagra
Suewed says:
viagra 25 mg order
pest control emergency number says:
Fantastic blog.Much thanks again. Really Cool.
Jimwed says:
how to buy tadalafil
Annawed says:
cialis 20mg price in india online
Teowed says:
lowest cost viagra online
Ivywed says:
cialis without a doctor
Joewed says:
cialis 5 mg online
go to says:
Muchos Gracias for your blog article. Keep writing.
Nickwed says:
cialis price south africa
Judywed says:
viagra soft gel capsules
Suewed says:
can i buy cialis over the counter uk
ร้านเช่าชุดไทยรามอินทรา says:
A big thank you for your article post.Really looking forward to read more. Really Great.
Joewed says:
where can i buy female viagra in india
Suewed says:
generic sildenafil for sale in canada
Nickwed says:
buy cheap viagra online
Kimwed says:
stromectol for humans
Miawed says:
ildenafil citrate
Janewed says:
prices for cialis
Joewed says:
can you buy viagra over the counter in south africa
best travel Esim says:
A round of applause for your blog post.Much thanks again. Will read on…
Samwed says:
generic sildenafil otc
Jackwed says:
cialis 20mg pills
Samwed says:
silagra soft
Janewed says:
purchase cialis without prescription
Kimwed says:
stromectol online
Boowed says:
how to buy modafinil in usa
Kimwed says:
ivermectin 3 mg dose
Joewed says:
sildenafil coupon 100 mg
iot reseller says:
I value the post.Really looking forward to read more. Want more.
Joewed says:
buy generic viagra online without prescription
Ashwed says:
buy genuine cialis
Jackwed says:
viagra tablet price
Suewed says:
cheap generic viagra online uk
Ivywed says:
tadalafil 20mg cheap
Ivywed says:
cialis 5mg best price india
Janewed says:
tadalafil for sale in canada
Amywed says:
viagra online buy
Nickwed says:
cheap generic cialis 5mg
Jackwed says:
real cialis online pharmacy
Evawed says:
how to get a viagra prescription
Paulwed says:
buy sildenafil generic
Samwed says:
buy cialis tablets australia
Yonwed says:
molnupiravir france
flat rate boxes says:
Great, thanks for sharing this blog article. Really Great.
Evawed says:
cialis 5mg australia
Jackwed says:
best women viagra
Marywed says:
generic viagra for sale
Miawed says:
cealis from canada
Janewed says:
buy cialis lowest price
Suewed says:
generic viagra safe
Jimwed says:
ivermectin 50mg/ml
Nickwed says:
sildenafil 100mg without prescription
Jimwed says:
online generic viagra canada
Miawed says:
tadalafil 2.5 mg tablet
Zakwed says:
cialis price in south africa
Annawed says:
sildenafil tablets 100mg for sale
Nickwed says:
order stromectol
Annawed says:
mail order viagra
Carlwed says:
cialis 200
Artificial jewellery online says:
Very neat blog article.Really thank you! Really Great.
Samwed says:
buy cymbalta uk
Janewed says:
how to order viagra from canada
Ivywed says:
cheap tadalafil 5 mg
https://academyrentalsinc.com/tent-rental-cincinnati/ says:
Great article, just what I wanted to find.
Joewed says:
cheap cialis fast shipping
Jimwed says:
stromectol 3 mg
Kimwed says:
plaquenil 150 mg
bitcoin superstar germany says:
wow, awesome article.Really thank you! Want more.
Kiawed says:
viagra for sale on line
Evawed says:
sildenafil 50mg canada
Wimwed says:
stromectol uk
Evawed says:
cheap tadalafil online
Jimwed says:
generic viagra soft tabs
Judywed says:
best viagra pills uk
Lisawed says:
order tadalafil from canada 5mg
Janewed says:
can i buy viagra over the counter canada
love doll says:
Really appreciate you sharing this blog post.Really looking forward to read more. Will read on…
Evawed says:
can i buy cialis in canada
DexoDus says:
cialis 10 mg online
Samwed says:
cialis buy india
Kimwed says:
plaquenil coupon
Nickwed says:
generic tadalafil australia
Zakwed says:
where to get cheap viagra
Boowed says:
cost of cialis daily
Annawed says:
sildenafil tablets 100 mg
Kiawed says:
otc viagra
Jimwed says:
hydroxychloroquine generic
DexoDus says:
kamagra without doctor prescription usa
Ivywed says:
tadalafil 40 mg
Markwed says:
cialis tadalafil 20mg
Annawed says:
online generic cialis canada
Lisawed says:
where to buy female viagra uk
Suewed says:
real viagra without a prescription
DexoDus says:
60 mg prednisone
Joewed says:
where can i buy viagra over the counter uk
Yonwed says:
cialis online ordering
USB Disk Security says:
Awesome blog article.Thanks Again. Cool.
DexoDus says:
viagra 100mg cheap price
Nickwed says:
cost for cialis for daily use
Suewed says:
ildenafil citrate
DexoDus says:
zithromax 15ml
Kimwed says:
generic viagra united states
Amywed says:
women viagra pills for sale
Teowed says:
tadalafil cost australia
Jimwed says:
ivermectin uk
Ivywed says:
canadian cialis generic
Jackwed says:
100mg viagra
Ivywed says:
cialis generic best price
slot deposit 10 ribu says:
Very good blog.Really looking forward to read more.
Kimwed says:
ivermectin price uk
Jimwed says:
purchase stromectol online
Jackwed says:
female viagra where to buy
Joewed says:
india cialis
Teowed says:
cheap canadian viagra pills
Ugowed says:
hydroxychloroquine 70 mg
Annawed says:
tadalafil medication cost
Samwed says:
order cheap generic viagra online
DexoDus says:
z pak cost
Yonwed says:
viagra price in usa
DexoDus says:
cialis coupons
metrolagu says:
I really enjoy the post.Thanks Again. Much obliged.
Ugowed says:
ivermectin 3mg
Annawed says:
buy sildenafil
Miawed says:
tadalafil cheap online
DexoDus says:
diflucan online
Jimwed says:
ivermectin 0.2mg
Joewed says:
generic cialis 200mg pills
Yonwed says:
generic tadalafil medication
Samwed says:
generic viagra for women
Wimwed says:
ivermectin 0.5% brand name
Joewed says:
canada viagra online
DexoDus says:
buy amoxicillin for cats online
Suewed says:
canadian pharmacy viagra 100 mg
Kimwed says:
quineprox 200 mg
Samwed says:
viagra cream uk
Ashwed says:
price cialis 20 mg
Nickwed says:
buy generic cialis 20mg
Paulwed says:
super cialis
Suewed says:
tadalafil tablets cheap
DexoDus says:
how much is amoxicillin prescription
Samwed says:
how to get cialis prescription australia
Marywed says:
generic cialis daily use
Nickwed says:
cialis 100 mg
Jackwed says:
tadalafil 5mg tablets india
Evawed says:
low price cialis
download lagu mp3 sisa rasa mahalini says:
I loved your article post. Will read on…
Teowed says:
viagra online order india
Evawed says:
cialis soft gel
DexoDus says:
azithromycin 500 mg mexico
Janewed says:
buy generic tadalafil 20mg
Judywed says:
discount cialis online
Jackwed says:
canadian pharmacies viagra
dana 5000 says:
A motivating discussion is definitely worth comment. I do think that you need to write more on this subject, it may not be a taboo subject but typically people do not talk about such topics. To the next! Kind regards!!|
Miawed says:
buy cheap cialis
Samwed says:
real cialis pills
Miawed says:
cialis canada buy online
Miawed says:
cialis 20 mg price
Ugowed says:
plaquenil generic brand
Samwed says:
cialis 20mg australia
Janewed says:
viagra soft flavoured
Kimwed says:
stromectol generic
http://www.kingswoodart.com/index.php/2021/12/06/are-sex-dolls-legal-in-america/ says:
Great, thanks for sharing this blog.Really thank you! Much obliged.
Markwed says:
buy viagra in usa
Kimwed says:
generic sildenafil no prescription
Annawed says:
viagra generic germany
Kimwed says:
stromectol tab
Miawed says:
tadalafil cost
Nickwed says:
cialis 40 mg canada
Ivywed says:
purchase cialis 20 mg
Suewed says:
can i buy cialis over the counter in usa
Annawed says:
where to buy viagra over the counter uk
Tedwed says:
viagra otc in canada
Janewed says:
sildenafil online for sale
Lisawed says:
female viagra for sale in india
Janewed says:
viagra online australia
Nickwed says:
sildenafil 20 mg price in india
Miawed says:
female viagra drug canada
Ivywed says:
viagra pills online india
dong ho co says:
Some truly great info , Glad I noticed this. “Use your imagination not to scare yourself to death but to inspire yourself to life.” by Adele Brookman.
Janewed says:
where to buy viagra in canada safely
Suewed says:
order viagra online canadian pharmacy
Janewed says:
generic tadalafil india
Suewed says:
how to get cialis prescription in canada
Marywed says:
cialis usa price
Jackwed says:
[url=http://cialisctabs.online/]75 mg tadalafil[/url]
Jimwed says:
ivermectin usa price
Joewed says:
buy cheapest generic viagra online
Annawed says:
cheapest price for tadalafil
Jackwed says:
best viagra tablets in india online
Joewed says:
buy cialis generic canada
Love Doll says:
Say, you got a nice blog article.Really looking forward to read more. Want more.
Janewed says:
cheap cialis online canadian pharmacy
Kimwed says:
stromectol south africa
Zakwed says:
cheap viagra usa
Jimwed says:
ivermectin 3mg
Nickwed says:
where to buy viagra 50mg online
Hop Over To This Web-site says:
hydroxychloroquine for covid hydroxychloroquine coronavirus
Ivywed says:
viagra soft flavoured
Annawed says:
where to get cialis cheap
Nickwed says:
40 mg cialis
Miawed says:
viagra without rx
Janewed says:
buy viagra online united states
Tedwed says:
buy viagra no prescription
Annawed says:
cialis daily use buy online
Miawed says:
online pharmacy viagra paypal
Marywed says:
cheap canadian viagra online
Suewed says:
viagra 100 mg tablet price in india
John Paul 2 Center says:
Wow, great blog post.Much thanks again. Will read on…
Jimwed says:
ivermectin medicine
Jackwed says:
buy viagra 50mg
find more here says:
inselaciune lucrare-licenta EU, neata adrian valentin , sc creativ trd srl
Carlwed says:
sildenafil canada price
take a look at says:
Very energetic article, I loved that bit. Will there be a part 2?Here is my blog post … Infinuity CBD Reviews
Jackwed says:
tadalafil tablets 2.5 mg
Evawed says:
where can i purchase viagra
Miawed says:
viagra canada online price
Kiawed says:
buy cialis canada canadian drugstore
Evawed says:
400 mg sildenafil
aka ms says:
I really liked your article.
Samwed says:
where to buy viagra online safely
Suewed says:
where can i buy cialis cheap
Evawed says:
cialis 20mg price
Jimwed says:
ivermectin humans
Joewed says:
how to get viagra prescription online
more info says:
Thanks again for the article post.Really looking forward to read more. Fantastic.Loading…
Zakwed says:
where to buy viagra over the counter
Joewed says:
buy female viagra canada
Lisawed says:
buy cialis 40 mg online
Nickwed says:
buy viagra price
Ashwed says:
how to get cialis prescription
Suewed says:
can you order viagra without a prescription
male pocket stroker says:
Appreciate you sharing, great article post.
카지노사이트 says:
I read this paragraph completely regarding the resemblance of most up-to-date and previous technologies, it’s awesome article.
바카라사이트 says:
Hi to every body, it’s my first visit of this blog; this weblog carries awesome and actually excellent information in favor of readers.
Boowed says:
cialis 100mg cost
Judywed says:
sildenafil otc canada
Wimwed says:
ivermectin lotion for lice
Annawed says:
sildenafil 100mg for sale
Ivywed says:
cheap generic cialis india
Kimwed says:
stromectol brand
Samwed says:
sildenafil cost us
Boowed says:
buy cialis in australia online
Kiawed says:
cialis cheap india
Evawed says:
generic cialis uk online pharmacy
Samwed says:
sildenafil citrate tablets
male realistic stroker says:
I really like and appreciate your blog.Really looking forward to read more.
Kimwed says:
stromectol canada
Joewed says:
sildenafil 50mg price pharmacy
Miawed says:
sildenafil generic coupon
Evawed says:
viagra 100mg price india
Judywed says:
cialis prescription
Suewed says:
5mg cialis generic
Evawed says:
price viagra 100mg
Ugowed says:
cost of ivermectin 1% cream
Ivywed says:
best price generic cialis 20mg
Wimwed says:
purchase ivermectin
Teowed says:
buy cialis from india online
Jackwed says:
cialis 20mg uk
Carlwed says:
stromectol 3 mg tablets price
Jimwed says:
ivermectin tablet price
Nickwed says:
real cialis cheap
rat control near me says:
Thanks so much for the article.Much thanks again. Want more.
Ivywed says:
cialis pills for sale uk
Janewed says:
where can i buy cialis over the counter in uk
Nickwed says:
viagra without prescription online
Suewed says:
canadian pharmacy discount coupon
Amywed says:
australia viagra
Amywed says:
where can i buy viagra online
Kiawed says:
tadalafil india pharmacy
PCCET says:
I’m not sure where you’re getting your info, but good topic. I needs to spend some time learning more or understanding more. Thanks for wonderful information I was looking for this information for my mission.
Jackwed says:
sildenafil tablets 100mg for sale
Carlwed says:
where can i buy cialis 20mg
Tedwed says:
cialis 10 mg online
Judywed says:
10 mg tadalafil daily
pest control for rats says:
I really liked your blog post.Much thanks again. Great.
Joewed says:
buy cialis soft tabs
Paulwed says:
female viagra australia where to buy
Viral contents says:
over the counter ed remedies: ed clinic – solutions for ed
Markwed says:
generic cialis from uk
Yonwed says:
cheap viagra 25
Samwed says:
tadalafil generic sale
Nickwed says:
viagra 50mg generic
Ivywed says:
where can i order cialis
Jackwed says:
lowest price tadalafil
Jimwed says:
generic ivermectin
Markwed says:
cialis medicine in india
Jackwed says:
stromectol tablets uk
Annawed says:
viagra for sale uk
Miawed says:
cheap brand cialis online
Janewed says:
sildenafil otc usa
Judywed says:
buy viagra from india online
Nickwed says:
online pharmacy viagra paypal
Juliaruisp says:
XEvil 5.0 solved captcha on your website!!
Want to post your text to 12.000.000 (12 MILLIONS!) websites? No problem – with new “XEvil 5.0 + XRumer 19.0.8” software complex!
Blogs, forums, boards, shops, guestbooks, social networks – any engines with any captchas!
XEvil also compatible with any SEO/SMM programms and scripts, and can accept captchas from any source. Just try it! 😉
Regards, MashaKeJew5616
P.S. Huge discounts are available (up to 50%!) for a short review about XEvil on any popular forum or platform. Just ask Official support for discount!
http://XEvil.Net/
Jimwed says:
ivermectin ebay
Samwed says:
tadalafil 20mg online
Lawyer DUI Near Me says:
I really like and appreciate your post.Much thanks again.
Miawed says:
canadian pharmacy viagra uk
Evawed says:
buy cialis online europe
Janewed says:
buy cialis 10mg
Food License Faridabad says:
I really enjoy the blog.Really looking forward to read more. Fantastic.
Janewed says:
over the counter female viagra australia
Look At This Now says:
If some one needs expert view regarding blogging afterward i advise him/her to go to see this blog, Keep up the nice job.
Markwed says:
tadalafil 5mg online
Ugowed says:
ivermectin humans
Joewed says:
sildenafil otc usa
Miawed says:
cialis medication cost
Annawed says:
buy cialis online mexico
Wimwed says:
ivermectin 6 tablet
CPN Number says:
This is one awesome article.Really thank you! Cool.
Joewed says:
generic cialis over the counter
Samwed says:
buy cialis in usa
Ivywed says:
where to buy cialis online in canada
Jimwed says:
stromectol covid
Samwed says:
ivermectin cream 1
Annawed says:
cialis 20mg cost
Jackwed says:
cialis price
Kimwed says:
stromectol oral
bokep says:
Very informative blog article. Awesome.
Evawed says:
cialis soft tabs online
Nickwed says:
cialis 20mg cost
Annawed says:
real cialis 20mg
Jackwed says:
cialis pills in canada
Miawed says:
online viagra prescription
Miawed says:
canadian pharmacy cialis brand
Janewed says:
brand cialis 100mg
Suewed says:
generic cialis 2.5 mg online
Ashwed says:
order sildenafil from canada
Samwed says:
[url=http://cheapcialistabletsorderonline.online/]buy tadalafil 20mg[/url]
Boowed says:
canadian viagra 100mg
Janewed says:
where can i order real viagra
adam&eve coupon says:
Im grateful for the blog article.Thanks Again.
Carlwed says:
viagra generic india
Tedwed says:
generic viagra effective
Nickwed says:
sildenafil generic brand name
This Page says:
orlistat market — xenical generic brand orlistat mexico
Evawed says:
cialis super active 20mg
Lisawed says:
on line viagra
Jackwed says:
[url=http://sildenafilcitrate1.online/]where to buy female viagra in south africa[/url]
Annawed says:
can you buy tadalafil over the counter
Markwed says:
viagra online canadian pharmacy
Janewed says:
tadalafil tablets 40mg
Suewed says:
tadalafil otc uk
Ugowed says:
stromectol ivermectin
Paulwed says:
cialis tablets canada
Teowed says:
buy cialis pills
Ivywed says:
female cialis australia
Suewed says:
buy tadalafil from canada
Kimwed says:
where to buy stromectol
Joewed says:
best pharmacy prices for cialis
Annawed says:
tadalafil best online pharmacy
Ivywed says:
online pharmacy cialis
Suewed says:
cialis pills over the counter
Nickwed says:
stromectol cream
Lisawed says:
ivermectin 1mg
Ashwed says:
ivermectin online
Evawed says:
women viagra tablet
Markwed says:
cialis 20 mg cost
Kiawed says:
sildenafil citrate tablets ip 100 mg
Ivywed says:
cialis paypal uk
Amywed says:
buy viagra generic online
Wimwed says:
price of ivermectin
Annawed says:
generic viagra 200
Evawed says:
can you safely buy viagra online
Marywed says:
cialis medication
Kimwed says:
ivermectin price usa
Nickwed says:
buy cheap generic cialis online
Kimwed says:
ivermectin 5
w881 club says:
Thanks for sharing, this is a fantastic blog.Really thank you! Want more.
Joewed says:
cialis online usa pharmacy
Jimwed says:
price of ivermectin liquid
Jimwed says:
stromectol ivermectin
UK FAKE DRIVING LICENCE says:
Say, you got a nice article.Much thanks again.
Jackwed says:
buy made in usa cialis online
Kimwed says:
ivermectin in india
Joewed says:
generic tadalafil tablets
Miawed says:
canadian pharmacy tadalafil 20mg
Janewed says:
female viagra for women
Paulwed says:
cialis soft tabs canada
Carlwed says:
torsemide 10 mg brand name
Suewed says:
buy generic cialis online in canada
Evawed says:
cialis generic over the counter
Ivywed says:
sildenafil 100 coupon
Bonnie Farrelly says:
Good info. Lucky me I discovered your site by accident (stumbleupon). I have book marked it for later!
Jimwed says:
ivermectin 200 mcg
Wimwed says:
cost of ivermectin
Jimwed says:
stromectol covid 19
Annawed says:
cialis soft tabs original
Janewed says:
tadalafil generic usa
Jackwed says:
tadalafil canada generic over the counter
Janewed says:
cialis 5mg best price canada
Yonwed says:
purchase discount cialis online
Samwed says:
where can i buy sildenafil 100mg
Zakwed says:
sildenafil 200mg
Joewed says:
where to buy viagra over the counter uk
Miawed says:
sildenafil 20mg coupon discount
Tedwed says:
sildenafil 2.5
Markwed says:
purchase cialis online canada
Joewed says:
cost of 1 viagra pill
Evawed says:
micardis price australia
Samwed says:
tadalafil chewable tablets
Nickwed says:
generic viagra pharmacy
Ivywed says:
buy cheap generic cialis
Yonwed says:
how to buy viagra in canada
Jimwed says:
ivermectin cost
Suewed says:
viagra capsules in india
Kiawed says:
tadalafil 5 mg tablet
great site says:
Awesome article.Thanks Again. Really Cool.
Judywed says:
buy cialis online safely
Caitlyn Hardie says:
Having read this I believed it was extremely informative. I appreciate you spending some time and effort to put this article together. I once again find myself spending a significant amount of time both reading and leaving comments. But so what, it was still worth it!
Kimwed says:
ivermectin ebay
MaxAtp says:
I love the efforts you have put in this, thankyou for all the great articles.Feel free to surf to my blog: nootropic pills
Miawed says:
buy generic zofran
Joewed says:
buy trental online
Yonwed says:
methocarbamol robaxin
Kimwed says:
price of stromectol
Jimwed says:
ivermectin covid
Annawed says:
paroxetine 100 mg
Boowed says:
tetracycline otc
Evawed says:
international online pharmacy
Judywed says:
vermox sale usa pharmacy
Joewed says:
cost of valtrex
Annawed says:
buy diflucan for yeast infection
Janewed says:
tetracycline tablets 250mg
Suewed says:
zestoretic 20 mg
Teowed says:
cheap ventolin
he said says:
Great, thanks for sharing this article.Thanks Again. Fantastic.
Samwed says:
gabapentin 600 mg capsule
Suewed says:
generic cafergot tablets
Jackwed says:
tizanidine tablets
local computer recycling says:
Im grateful for the article post.Much thanks again. Fantastic.
Ivywed says:
atarax generic brand
Janewed says:
tetracycline pills for sale
Samwed says:
flomax generic alternative
Evawed says:
medrol buy online
Jimwed says:
buy ivermectin nz
Annawed says:
zestoretic 10
Boowed says:
super active cialis
Jackwed says:
generic malegra dxt
Ugowed says:
ivermectin prescription
Evawed says:
cialis website
Miawed says:
accutane medicine
Zakwed says:
cost of tadalafil 20 mg
Suewed says:
pharmacy online australia free shipping
Nickwed says:
cost of erythromycin 500mg
Jimwed says:
stromectol in canada
Janewed says:
cephalexin generic otc
it recycling says:
I value the blog post.Really thank you! Awesome.
Nickwed says:
buy generic plavix online
Samwed says:
dexamethasone online pharmacy
Judywed says:
malegra 25
Kimwed says:
ivermectin online
Carlwed says:
buy paroxetine australia
Yonwed says:
cheap sildenafil tablets uk
Thomas Heubusch says:
These moles may possibly be irregular in size and color and that is what can make them this type of wellness danger. When you have been born with this particular problem you might also be more likely to develop Melanoma and so you might have to get the required precautions with regards to protecting your pores and skin and your well being.
it disposal says:
Thanks for the blog.Much thanks again. Great.
中国传统饮食 says:
I cannot thank you enough for the post.Thanks Again. Great.
buy ivermectin 3 mg for humans says:
procedia does ivermectin kill hookworms objectively stromectol 12mg online ivermectin 12mg tablets for humans for sale – ivermectin pills for humans
[url=http://ivermectin3mg.quest/#]ivermectin 3 mg tablets
for humans for sale[/url] nastepnie stromectol quail
Miawed says:
malegra dxt 130 mg
香港性交易交易者招募 says:
I value the blog post.Really thank you! Will read on…
abogado especialista en derecho bancario says:
Hello, its good piece of writing about media print, we all be aware of media is a great source of information.
Ivywed says:
otc lexapro
Amywed says:
feldene capsule 20mg
Jimwed says:
buy ivermectin
Jackwed says:
prazosin medicine
Nickwed says:
can you buy tadalafil online
Kimwed says:
ivermectin 50 mg
Jackwed says:
can you buy strattera over the counter
Wimwed says:
stromectol 3 mg tablets price
Aluminium Mobile scaffold says:
I am so grateful for your blog.Really looking forward to read more. Really Great.
Marywed says:
buy xenical canada
Joewed says:
no prescription synthroid
Paulwed says:
avana
Ivywed says:
zithromax 250mg tablets
Samwed says:
8mg zanaflex
Jackwed says:
cephalexin 250 mg price in india
Wimwed says:
ivermectin 4000 mcg
Annawed says:
where can i buy cialis tadalafil in edmonton
Suewed says:
baclofen 4097
Jackwed says:
ampicillin 750 mg
Nickwed says:
biaxin uti
Evawed says:
tadacip 20 mg price
Miawed says:
cost of prednisone 10 mg tablet
Joewed says:
estrace cream india
Jimwed says:
ivermectin cream
Marywed says:
albendazole buy online india
Janewed says:
medrol 80 mg
faifox eon says:
Muchos Gracias for your blog article.Thanks Again. Want more.
Lisawed says:
buy modafinil online prescription
Janewed says:
ivermectin topical
Paulwed says:
propranolol hydrochloride
Ivywed says:
how to get cephalexin
Samwed says:
synthroid 150 mcg cost
Tedwed says:
malegra 100 mg for sale
Ivywed says:
albendazole 400mg tablet price
Kimwed says:
buy ivermectin online
Miawed says:
prescription amoxicillin 500mg
Ashwed says:
biaxin 500mg
Joseph Wesolick says:
Pretty! This has been an incredibly wonderful article. Thank you for providing this info.
Suewed says:
atarax price uk
Suewed says:
zestoretic 20-25 mg
Teowed says:
tadacip 20 sale
Paulwed says:
zithromax price
Evawed says:
buy albendazole in canada
Annawed says:
zestoretic generic
Ugowed says:
stromectol cream
Annawed says:
sildenafil 20 mg pill
Amywed says:
cialis cheapest price canada
Boowed says:
chewing cialis
Kimwed says:
ivermectin otc
Joewed says:
online cheap tadalafil
Joewed says:
seroquel 20 mg
Nickwed says:
clindamycin 1 price
DexoDus says:
generic 5mg cialis
Miawed says:
price of medrol
Evawed says:
cialis 80mg
Tedwed says:
buy accutane usa
DexoDus says:
can alvesco and albuterol be taken together
Paulwed says:
malegra india
Samwed says:
plavix uk buy
DexoDus says:
us cost advair diskus
Lisawed says:
buy seroquel online india
Suewed says:
dexamethasone 1.5 tablet
DexoDus says:
how much does fluconazole 150 mg cost
Markwed says:
paxil drug
Jimwed says:
stromectol tab
Kimwed says:
ivermectin buy
DexoDus says:
how to get stromectol
Kimwed says:
ivermectin 2%
porn site says:
Thanks for sharing, this is a fantastic blog article.Really looking forward to read more. Fantastic.
Yonwed says:
accutane prescription cost uk
Janewed says:
buy motilium tablets
Evawed says:
buy benicar cheap
Ivywed says:
cleocin t cream
DexoDus says:
zpack for uti
Zakwed says:
generic tadalafil south africa
online assignment help says:
Thanks again for the article.Much thanks again. Fantastic.
Nickwed says:
tadalafil from mexico
Boowed says:
celebrex 100 mg
Janewed says:
cafergot buy canada
Nickwed says:
where can i get brand name augmentin
Janewed says:
baclofen 10 mg tabs
Patricia Powell says:
ventolin u rocznego dziecka ventolin generics ventolin in hand luggage
Janewed says:
cialis best price australia
Ivywed says:
generic sildenafil from india
Annawed says:
cheap viagra online canadian pharmacy
Jimwed says:
cost for ivermectin 3mg
Judywed says:
atarax 50 mg tablet price
Ashwed says:
tadacip 20 mg uk
Kimwed says:
ivermectin cost australia
DexoDus says:
propecia 1 mg side effects
RV Maintenance And Repair Near Me says:
Fantastic article post.Thanks Again.
Janewed says:
estrace 0.5 g
Kiawed says:
avana pills
Suewed says:
vermox pharmacy
Samwed says:
cozaar drug
DexoDus says:
azithromycin 250 mg walmart
Kimwed says:
price of stromectol
RV Slide Out Repair Near Me says:
A big thank you for your blog post.Much thanks again. Great.
Evawed says:
stromectol buy
Suewed says:
ivermectin humans
DexoDus says:
cheap furosemide
Jimwed says:
ivermectin 1 topical cream
Evawed says:
stromectol otc
Markwed says:
ivermectin pills
Miawed says:
stromectol usa
Miawed says:
buy stromectol uk
Jackwed says:
ivermectin over the counter
Evawed says:
where can i buy ivermectin
Joewed says:
ivermectin lice
Samwed says:
ivermectin usa price
Joewed says:
ivermectin covid
Wimwed says:
ivermectin price uk
Suewed says:
ivermectin pills canada
Judywed says:
ivermectin 50ml
case wood says:
Wow, great blog.Thanks Again. Want more.
Samwed says:
ivermectin 3 mg dose
LED Panel light says:
Im thankful for the post.Really looking forward to read more. Really Great.
Ugowed says:
ivermectin 3 mg
take a look at says:
Thx so much !! Appreciate the helpful information.
Miawed says:
stromectol over the counter
Alanwed says:
ivermectin 50 mg
why does my ice tea brewer make a mess says:
I really like and appreciate your blog post.Really looking forward to read more. Fantastic.
Nickwed says:
india ivermectin
Markwed says:
ivermectin 0.5 lotion india
DexoDus says:
misoprostol cytotec online
Ivywed says:
where to buy ivermectin
On this site says:
Hi there! I just wanted to ask if you ever have any problems with hackers? My last blog (wordpress) was hacked and I ended up losing several weeks of hard work due to no data backup. Do you have any methods to protect against hackers?
Judi Slot terpercaya says:
Wow, great blog.Thanks Again. Fantastic.
Marywed says:
ivermectin tablet 1mg
Evawed says:
where to buy ivermectin
Boowed says:
buy ivermectin canada
Nickwed says:
ivermectin 5
Ivywed says:
stromectol uk
Samwed says:
generic ivermectin
Joewed says:
stromectol ivermectin 3 mg
818king says:
Great, thanks for sharing this blog post. Will read on…
Samwed says:
ivermectin tablet price
Jimwed says:
stromectol 0.5 mg
Denwed says:
buy stromectol uk
Janewed says:
how to get ivermectin
Zakwed says:
ivermectin pills
Annawed says:
ivermectin 3mg tablets price
Nickwed says:
where to buy stromectol
Nickwed says:
ivermectin over the counter canada
Miawed says:
price of ivermectin tablets
Ugowed says:
ivermectin 400 mg
download lagu aku bukan jodohnya tri suaka says:
I think this is a real great article post.Thanks Again. Great.
Jackwed says:
ivermectin 3mg
Jimwed says:
ivermectin ebay
Eyewed says:
buy liquid ivermectin
Jackwed says:
ivermectin 0.5%
Ivywed says:
where to buy stromectol online
Wimwed says:
ivermectin over the counter
Suewed says:
ivermectin 400 mg brands
Suewed says:
stromectol buy
Eyewed says:
ivermectin tablets
Annawed says:
stromectol nz
togel 5000 says:
Attractive part of content. I just stumbled upon your blog and in accession capital to assert that I get in fact enjoyed account your blog posts. Anyway I will be subscribing on your feeds and even I success you get entry to consistently fast.|
Nickwed says:
ivermectin generic
Annawed says:
cephalexin 500mg capsule price
Janewed says:
online pharmacy cheap cialis
สล็อตเว็บตรง สล็อตแตกง่าย says:
wow, awesome blog post. Really Cool.
Jimwed says:
buy cheap tadalafil online usa
Kimwed says:
best buy viagra online
RV Service Centers Near Me says:
I absolutely love your website.. Pleasant colors & theme. Did you make this web site yourself? Please reply back as Iím looking to create my own website and want to find out where you got this from or exactly what the theme is called. Many thanks!
Annawed says:
viagra cost comparison
Kimwed says:
buy sildenafil online
Ivywed says:
purchase ivermectin
Joewed says:
viagra tablet cost
DezoDus says:
price of generic cialis
Ashwed says:
buy viagra 100mg online uk
Joewed says:
once a day cialis
DezoDus says:
cialis for daily use cost
Suewed says:
cialis 20mg sale
Samwed says:
ivermectin 4 mg
Suewed says:
sildenafil 100mg tablets price
RV Service Centers Near Me says:
I enjoy reading through a post that will make people think. Also, thanks for allowing for me to comment!
Teowed says:
tadalafil india brand
Alanwed says:
genuine viagra prices
Annawed says:
ivermectin 0.1
Miawed says:
strattera india price
Carlwed says:
buy viagra through paypal
Ivywed says:
[url=http://ordercialis5pills.quest/]how can i get cheap cialis[/url]
Evawed says:
buy viagra online cheap
Annawed says:
tadalafil 100mg best price
Kimwed says:
female viagra pill online
Jackwed says:
keflex price australia
Samwed says:
tadalafil india 5mg
Evawed says:
viagra 25mg cost
Annawed says:
how to order viagra online safely
Marywed says:
sildenafil tablet 50mg
Amywed says:
cialis tadalafil 20mg
Janewed says:
how to order cialis pills
Miawed says:
can you order generic viagra online
Miawed says:
discount viagra canada
Jimwed says:
viagra from canada
RV Exhaust Repair Near Me says:
Itís nearly impossible to find educated people about this subject, but you sound like you know what youíre talking about! Thanks
Ivywed says:
zoloft brand name price
Joewed says:
tetracycline brand name in usa
Miawed says:
where can i buy prednisone without a prescription
Kiawed says:
online propecia uk
Yonwed says:
where to buy tetracycline
RV Generator Repair Near Me says:
Way cool! Some very valid points! I appreciate you writing this post plus the rest of the site is also very good.
Miawed says:
viagra 6 pills
Nickwed says:
order tetracycline canada
Samwed says:
ivermectin 18mg
Jackwed says:
where to get zithromax
Janewed says:
cialis canada pharmacy online
Samwed says:
viagra soft gel
Carlwed says:
compare viagra
Nickwed says:
how to buy viagra usa
Teowed says:
how to obtain viagra
Kimwed says:
generic cialis 2018 usa
Evawed says:
stromectol online
Evawed says:
generic cialis for daily use
Jimwed says:
cialis 5 mg online
Janewed says:
60 mg sildenafil
Jackwed says:
flagyl tablets
Miawed says:
tadalafil 10 mg
Jackwed says:
lowest price cialis 20mg
Best RV Repair Near Me says:
You should be a part of a contest for one of the highest quality sites on the web. I am going to recommend this site!
Paulwed says:
baclofen comparison
Ivywed says:
viagra uk best price
Ugowed says:
baclofen medicine price
Carlwed says:
buy generic cialis online australia
Joewed says:
propecia for less
Samwed says:
lowest cost generic cialis
Joewed says:
tadalafil us
Nickwed says:
best viagra tablets india
Ivywed says:
tadalafil 20 mg no rx
Boowed says:
buy cialis 100mg
Judywed says:
finasteride over the counter
Jackwed says:
where can you buy cialis over the counter
Miawed says:
12mg tizanidine
Samwed says:
viagra online safe
Annawed says:
ivermectin cost in usa
Janewed says:
tadalafil 20 mg paypal
Credit Card Processing Sales Jobs says:
wow, awesome article.Thanks Again. Much obliged.
Jackwed says:
hydrochlorothiazide capsule brand name
Suewed says:
cialis prescription price australia
Evawed says:
ivermectin 4 tablets price
Sirsmuct says:
darknet marketplace tor market links
Teowed says:
order viagra online australia
https://www.24x7liveindia.com/ says:
Very good article post.Really looking forward to read more. Will read on…
Miawed says:
usa viagra 100
Evawed says:
ivermectin 3mg price
Eyewed says:
ivermectin lotion
Annawed says:
ivermectin buy nz
Nickwed says:
generic name for ivermectin
Ivywed says:
5mg cialis from canada
Suewed says:
stromectol medicine
www.24x7liveindia.com says:
A big thank you for your blog article. Great.
Jackwed says:
modafinil uk prescription
Marywed says:
tadalafil 100 mg uk
Tedwed says:
cheapest sildenafil tablets
Janewed says:
cialis canada 20mg
Annawed says:
stromectol for sale
RV Collision Repair Shops Near Me says:
Hello, I do believe your blog could possibly be having browser compatibility problems. When I look at your web site in Safari, it looks fine however when opening in Internet Explorer, it has some overlapping issues. I merely wanted to provide you with a quick heads up! Aside from that, excellent website!
Ivywed says:
[url=http://buycolchicine.quest/]colchicine pill buy online[/url]
Amywed says:
ivermectin 3
Janewed says:
sildenafil australia buy
Suewed says:
tadalafil 20mg uk
Ugowed says:
tadalafil tab 10mg
Samwed says:
can i order cialis online in canada
Samwed says:
160 mg strattera
Lisawed says:
stromectol 12mg
Joewed says:
allopurinol drug
Samwed says:
stromectol tablets
Jasonwed says:
cialis 5mg price comparison
Boowed says:
stromectol tablets buy online
Company Registration Gurgaon says:
Really appreciate you sharing this article.Really looking forward to read more. Awesome.
Samwed says:
allopurinol 3 mg
Carlwed says:
stromectol uk
Markwed says:
toradol tabs
Weblink says:
ivermectin prophylaxis protocol ivermectina como se toma
Annawed says:
ivermectin tablets order
Nickwed says:
viagra 50mg tablet
Marywed says:
plaquenil for psoriatic arthritis
Jackwed says:
finasteride 5mg tablets
Ivywed says:
plaquenil 200 mg cost
Denwed says:
disulfiram prescription
Paulwed says:
can you buy genuine viagra online
Lisawed says:
hydroxychloroquine sulfate 300 mg
Annawed says:
amoxicillin trihydrate
Kimwed says:
furosemide 20 tablet
Joewed says:
plaquenil 5 mg
Samwed says:
minoxidil finasteride
Janewed says:
lisinopril 30 mg
Jimwed says:
lisinopril 40 mg prices
Suewed says:
order ventolin online uk
Kimwed says:
buy lisinopril uk
Miawed says:
generic viagra price
Site Web says:
Aw, this was an extremely good post. Finding the time and actual effort to generate a top notch article… but what can I say… I hesitate a lot and don’t manage to get nearly anything done.
Nickwed says:
cialis brand online
Joewed says:
viagra south africa price
Miawed says:
where can i buy viagra over the counter
Jimwed says:
lisinopril 25mg tablets
Janewed says:
over the counter lisinopril
Miawed says:
hydroxychloroquine 600 mg
Kimwed says:
generic viagra online fast delivery
Suewed says:
women cialis
Joewed says:
antabuse online uk
Suewed says:
generic finasteride canada
Hop Over To This Website says:
Have you ever heard of second life (sl for short). It is essentially a video game where you can do anything you want. sl is literally my second life (pun intended lol). If you would like to see more you can see these Second Life articles and blogs
TimKal says:
darknet drug store darknet markets
JimLib says:
tor marketplace tor marketplace
Joewed says:
online cialis pharmacy
DavidWhaft says:
deep web markets dark0de market
Ivywed says:
doxycycline 100mg canada
Jimwed says:
doxycycline 50 mg price
Tedwed says:
plaquenil price
Jackwed says:
canada otc albuterol
happy appy says:
I absolutely love your website.. Excellent colors & theme. Did you create this site yourself? Please reply back as Iím looking to create my own personal website and would like to learn where you got this from or just what the theme is called. Appreciate it!
BobbyEvinc says:
darknet market list darknet drug links
Dezzyvurse says:
dark market onion darknet drug links
Patricktug says:
dark market list deep web drug markets
LennyCop says:
tor dark web darkmarket list
Dylannot says:
dark web link dark web drug marketplace
OzzyMip says:
tor marketplace deep web drug store
Williamliacy says:
darknet market list bitcoin dark web
TimKal says:
dark web link deep web drug markets
JennyMip says:
darknet websites darknet drug market
DonnyCop says:
dark web sites deep web markets
Ashleybar says:
dark web market links darkmarket 2021
Sharylhilla says:
drug markets onion darknet drug store
Nickwed says:
order clomid pills online
DennyCop says:
bitcoin dark web deep web drug url
Versusvurse says:
deep web drug links dark market 2022
Johnnot says:
dark market url deep web drug url
Rickvurse says:
deep web drug markets drug markets dark web
DiamondEvinc says:
deep web drug store drug markets dark web
DavidWhaft says:
dark market url dark web markets
Sirsmuct says:
darkode market darkmarket link
TeddyMip says:
bitcoin dark web dark market list
Annawed says:
60 mg generic cialis
Ricconot says:
tor markets 2022 dark web markets
Diedraovers says:
best darknet markets darknet market list
Samuelnum says:
dark market 2021 deep web markets
Kellydum says:
darkmarket url tor market
TimKal says:
dark market list darkmarket
Dezzyvurse says:
bitcoin dark web tor markets links
JimLib says:
deep web markets darkmarket link
Evawed says:
clomid clomiphene
DavidWhaft says:
darknet drug market darkmarket url
Sirsmuct says:
dark market drug markets onion
Williamliacy says:
dark markets 2022 darkmarket 2021
Bobb1Evinc says:
dark market onion tor marketplace
BobbyEvinc says:
bitcoin dark web drug markets dark web
LennyCop says:
darknet drug market drug markets onion
Anoldvurse says:
darkmarket tor markets 2021
FelixMip says:
dark web sites tor markets 2022
Sirsmuct says:
darknet market list dark markets 2022
Ashleybar says:
drug markets onion darknet market
DonnyCop says:
dark web market tor markets links
LawrenceCop says:
drug markets onion drug markets dark web
DennyCop says:
dark market url deep web markets
Josenot says:
tor marketplace darkmarket list
Dylannot says:
darkmarket link darknet drug links
OzzyMip says:
dark web link bitcoin dark web
DavidWhaft says:
darkode reborn dark market list
Sharylhilla says:
deep web markets drug markets onion
Yonwed says:
how to buy viagra in canada
Ivywed says:
antabuse pills
Samuelnum says:
tor dark web best darknet markets
PedroEvinc says:
tor marketplace dark web market
Versusvurse says:
deep web drug links darknet drug links
JennyMip says:
drug markets dark web deep web drug store
Sirsmuct says:
drug markets dark web tor market links
Jackwed says:
where can i find viagra
Judywed says:
stromectol 3mg
TimKal says:
dark market 2022 dark web drug marketplace
Patricktug says:
dark web market deep web drug store
Website Link says:
Xoilac Tv Thẳng Bóng Đáhn24hNếu cứ nghịch như cách vừa tiêu diệt Everton tới 3-1 trên sảnh khách
Diedraovers says:
dark web drug marketplace dark market onion
Johnnot says:
dark market onion dark markets 2022
Miawed says:
viagra prescription coupon
Alanwed says:
can i buy cialis online in canada
DiamondEvinc says:
dark market darknet drug links
Dezzyvurse says:
darknet drug links tor markets 2022
Markwed says:
sildenafil 25 mg price in india
Samuelnum says:
darkmarket dark market list
LennyCop says:
darknet drug links bitcoin dark web
TeddyMip says:
deep web drug url darkmarket list
Nickwed says:
plaquenil uk price
car accident injury lawyers near me says:
This site was… how do I say it? Relevant!! Finally I’ve found something which helped me. Cheers!
Lisawed says:
plaquenil for fibromyalgia
Anoldvurse says:
dark market list darkmarket list
DennyCop says:
dark web market links dark web drug marketplace
LawrenceCop says:
darkmarket 2021 deep web drug url
Kellydum says:
dark market link darkmarket
DavidWhaft says:
dark web market darknet market lists
Bobb1Evinc says:
deep web drug links dark market
JimLib says:
drug markets onion darknet markets
Ashleybar says:
darkmarket 2022 dark market list
Sirsmuct says:
dark web drug marketplace dark web sites
Williamliacy says:
dark0de url deep web markets
Samwed says:
cost of lasix 10mg
Sharylhilla says:
darknet drug store deep web drug store
Rickvurse says:
darknet websites darknet market list
BobbyEvinc says:
dark market 2022 tor markets 2022
DonnyCop says:
dark web market list bitcoin dark web
Versusvurse says:
darknet market lists darknet websites
FelixMip says:
drug markets onion bitcoin dark web
Evawed says:
plaquenil generic cost
Samwed says:
cialis online us
TimKal says:
dark web markets darknet market list
Evawed says:
cialis 2.5 coupon
Dylannot says:
deep web drug markets drug markets dark web
PedroEvinc says:
dark market 2021 tor market url
OzzyMip says:
dark markets 2022 darkmarket link
JennyMip says:
dark market list dark web market list
Sirsmuct says:
dark market link deep web drug links
Diedraovers says:
darkmarket list dark web link
Patrickevali says:
tor market url dark market onion
Johnnot says:
dark web sites best darknet markets
Patricktug says:
dark market list darkmarket 2022
Dezzyvurse says:
tor marketplace dark market
DiamondEvinc says:
darkmarket url tor market
Samuelnum says:
tor markets 2021 dark0de url
Anoldvurse says:
darkmarket 2022 darknet market
Ricconot says:
darkmarket link dark market 2022
DavidWhaft says:
darknet drug links darkode reborn
LennyCop says:
best darknet markets deep web markets
TeddyMip says:
dark markets 2022 darknet market lists
JimLib says:
tor market url darknet websites
LawrenceCop says:
dark web drug marketplace deep web drug store
Ashleybar says:
darkmarket list drug markets onion
Rickvurse says:
deep web drug links dark market
DonnyCop says:
dark market 2021 dark markets 2022
Bobb1Evinc says:
darknet drug links dark web market list
Sharylhilla says:
dark web link darknet drug market
TimKal says:
darkmarket list darknet markets
FelixMip says:
best darknet markets tor markets 2021
Josenot says:
darkmarket 2021 dark markets 2022
Jimwed says:
infertility clomid
BobbyEvinc says:
tor markets 2022 dark web market links
Williamliacy says:
dark market url dark web drug marketplace
Markwed says:
buy plaquenil from canada
Sirsmuct says:
tor market url dark web markets
Kimwed says:
plaquenil 200 mg 60 tab
Kellydum says:
dark market 2022 darknet market lists
Versusvurse says:
dark markets 2022 drug markets dark web
Patrickevali says:
tor markets 2021 deep web drug links
Janewed says:
lisinopril 10 mg
Dylannot says:
tor market links bitcoin dark web
PedroEvinc says:
deep web drug markets darknet markets
DennyCop says:
darkmarket list darknet market
OzzyMip says:
dark market url darkmarket
Joewed says:
lisinopril 20 mg pill
DiamondEvinc says:
darknet market lists dark market url
Patricktug says:
darkmarket list darknet market
JennyMip says:
dark market 2021 deep web markets
Johnnot says:
dark web market list tor marketplace
LawrenceCop says:
tor markets 2022 tor market url
LennyCop says:
darknet marketplace darkmarket list
Anoldvurse says:
darknet market lists dark web drug marketplace
Joewed says:
12.5 mg furosemide
Samuelnum says:
dark market darkode reborn link
Ashleybar says:
dark market 2022 darkmarket list
TimKal says:
darknet websites drug markets onion
Ricconot says:
darkmarket list dark markets 2022
DonnyCop says:
darknet drug store dark market link
TeddyMip says:
dark web market links deep web drug links
Williamliacy says:
dark web market darknet drug links
salon printing says:
There’s definately a lot to find out about this topic. I love all the points you’ve made.
Rickvurse says:
deep web drug links darknet markets
Sirsmuct says:
best darknet markets darknet marketplace
Sharylhilla says:
tor markets links dark web sites
BobbyEvinc says:
dark market url darknet market list
JimLib says:
darkmarket 2022 dark web markets
Patrickevali says:
darkmarket list darknet market links
Bobb1Evinc says:
darknet market links dark web markets
Annawed says:
metformin 3000 mg
PedroEvinc says:
dark web sites tor markets 2022
Versusvurse says:
dark market 2021 darknet market list
DennyCop says:
tor marketplace dark market onion
Camper And RV Repair Near Me says:
That is a really good tip particularly to those fresh to the blogosphere. Simple but very accurate informationÖ Thank you for sharing this one. A must read post!
FelixMip says:
darknet markets darknet drug store
Josenot says:
darknet drug links dark market list
Kellydum says:
deep web drug markets best darknet markets
Dezzyvurse says:
deep web drug links darknet market links
Patricktug says:
dark web market links darknet drug store
DiamondEvinc says:
dark markets 2022 bitcoin dark web
Dylannot says:
dark markets 2022 dark market url
JennyMip says:
dark markets 2022 tor marketplace
DavidWhaft says:
deep web markets dark market 2022
Johnnot says:
tor markets 2022 darkmarket list
Ivywed says:
generic viagra uk pharmacy
Rickvurse says:
best darknet markets drug markets onion
OzzyMip says:
tor market drug markets dark web
LawrenceCop says:
darknet market lists darknet drug store
Ashleybar says:
darknet market tor marketplace
DonnyCop says:
darkmarket url dark web markets
Sirsmuct says:
darkode link deep web drug url
Samuelnum says:
darknet market list darknet market
Ricconot says:
tor markets links bitcoin dark web
Patrickevali says:
darknet market darkmarket url
TimKal says:
deep web markets dark market link
Janewed says:
furosemide 40 mg cheap
Anoldvurse says:
darkmarket darknet drug links
LennyCop says:
darkmarket 2022 darknet marketplace
Jackwed says:
cialis tablets for sale uk
TeddyMip says:
dark web drug marketplace deep web drug markets
Williamliacy says:
darkmarket dark market onion
Samwed says:
glyburide metformin
Ugowed says:
modafinil online no prescription
JimLib says:
tor dark web tor markets 2021
DennyCop says:
dark market 2022 tor dark web
Bobb1Evinc says:
tor marketplace dark web sites
BobbyEvinc says:
darknet market darknet drug store
Versusvurse says:
tor markets 2022 dark web market links
DavidWhaft says:
deep web markets darknet market links
PedroEvinc says:
bitcoin dark web dark markets 2022
Dezzyvurse says:
tor markets 2021 dark web drug marketplace
DiamondEvinc says:
deep web drug url bitcoin dark web
Kimwed says:
tadalafil 20 mg online india
LawrenceCop says:
darkmarket url dark market link
FelixMip says:
deep web drug url dark market
Dylannot says:
bitcoin dark web dark market 2021
Josenot says:
darknet marketplace darknet drug store
Sharylhilla says:
deep web drug links dark web drug marketplace
Williamliacy says:
dark web market links best darknet markets
Patrickevali says:
darknet markets darkmarket list
TimKal says:
tor markets links darkmarket
Rickvurse says:
tor markets links bitcoin dark web
DonnyCop says:
darkmarket 2022 deep web drug url
LennyCop says:
dark web markets darknet drug store
Johnnot says:
dark market 2022 dark web drug marketplace
Kellydum says:
darknet market lists darknet market lists
JennyMip says:
deep web drug store dark market onion
Anoldvurse says:
dark web drug marketplace darknet market
RV Electrical Repair Near Me says:
You’re so cool! I don’t believe I’ve truly read through something like this before. So nice to find someone with some original thoughts on this topic. Seriously.. thank you for starting this up. This site is something that is needed on the web, someone with some originality!
OzzyMip says:
darknet drug links darknet market list
Sirsmuct says:
tor market darknet drug links
Samuelnum says:
tor marketplace darkmarket link
DennyCop says:
darkmarket link dark markets 2022
Ricconot says:
tor markets 2021 darkmarket link
JimLib says:
darknet markets darkmarket 2022
BobbyEvinc says:
darknet drug store tor marketplace
DavidWhaft says:
tor markets 2022 deep web drug links
TeddyMip says:
tor market dark web market list
Kimwed says:
order tadalafil canada
Ugowed says:
brand cialis
Versusvurse says:
darknet websites dark web drug marketplace
Annawed says:
sildenafil buy over the counter
Jimwed says:
buy cialis from india online
Suewed says:
can you buy cialis over the counter in uk
Bobb1Evinc says:
darknet market list darkmarket 2022
PedroEvinc says:
deep web markets tor marketplace
Tedwed says:
price of ivermectin
Sharylhilla says:
best darknet markets deep web drug links
Diedraovers says:
darkmarket 2021 darkmarket list
LawrenceCop says:
darknet market links darkmarket list
LennyCop says:
deep web markets tor market
Dezzyvurse says:
darknet websites tor markets 2021
Patricktug says:
darkmarket 2022 dark web market links
Patrickevali says:
darkmarket 2021 dark web market list
Judywed says:
tadalafil price usa
Kellydum says:
darkmarket 2022 darknet marketplace
Williamliacy says:
tor marketplace deep web drug links
DonnyCop says:
darknet market lists dark web market list
FelixMip says:
tor market url tor markets 2022
Josenot says:
darkmarket link dark market
Rickvurse says:
drug markets dark web dark market link
Anoldvurse says:
tor market darkmarket link
Dylannot says:
tor markets 2021 tor dark web
DavidWhaft says:
tor marketplace drug markets onion
Sirsmuct says:
dark market onion darknet marketplace
JennyMip says:
best darknet markets deep web markets
Samuelnum says:
dark web drug marketplace darknet drug market
Nickwed says:
lopressor 5
DennyCop says:
dark market link darknet marketplace
Janewed says:
doxycycline 100mg tablets nz
OzzyMip says:
drug markets onion deep web drug url
BobbyEvinc says:
deep web drug url darknet marketplace
Johnnot says:
dark markets 2022 best darknet markets
Versusvurse says:
deep web drug store deep web drug markets
Ashwed says:
motilium australia
JimLib says:
dark web drug marketplace darknet drug store
Sharylhilla says:
tor market url darkmarket link
Bobb1Evinc says:
dark market deep web drug markets
TeddyMip says:
darkmarket 2022 darkmarket url
PedroEvinc says:
darkmarket link tor market
Diedraovers says:
dark market list dark web market links
LennyCop says:
darknet drug store darknet websites
DiamondEvinc says:
tor marketplace bitcoin dark web
Dezzyvurse says:
darknet marketplace dark web market
LawrenceCop says:
darknet drug market dark market url
Patricktug says:
darknet market links tor dark web
Patrickevali says:
darknet drug links tor market
DavidWhaft says:
dark web drug marketplace deep web markets
DonnyCop says:
darknet market links tor market links
Williamliacy says:
dark market 2022 dark web market
Sirsmuct says:
dark web market links dark market
Ashwed says:
buy tadalafil 40 mg
TimKal says:
dark market link darknet drug store
DennyCop says:
dark web market list tor market url
FelixMip says:
darkmarket list darknet drug store
Josenot says:
darkmarket list dark market url
Rickvurse says:
drug markets onion darknet marketplace
JennyMip says:
darknet websites darknet marketplace
Samuelnum says:
dark web drug marketplace dark0de url
Jimwed says:
10mg cialis online
Suewed says:
viagra soft tablets
Anoldvurse says:
darknet drug store darkmarket url
Dylannot says:
best darknet markets bitcoin dark web
OzzyMip says:
darkmarket 2021 darknet drug links
Versusvurse says:
darknet drug store dark market
Johnnot says:
darkmarket url tor marketplace
BobbyEvinc says:
darkmarket link drug markets onion
Ricconot says:
dark market dark markets 2022
LawrenceCop says:
darknet drug market darkmarket 2021
LennyCop says:
dark market tor markets 2021
Bobb1Evinc says:
darkmarket 2021 dark market
Diedraovers says:
deep web drug store darknet drug links
Dezzyvurse says:
tor markets links darknet markets
TeddyMip says:
darknet websites tor markets 2021
Annawed says:
ivermectin lotion for lice
Patricktug says:
tor markets 2022 deep web drug store
DiamondEvinc says:
drug markets dark web dark web market
DavidWhaft says:
darknet drug links darkmarket
Patrickevali says:
dark web link darknet market lists
PedroEvinc says:
dark web sites bitcoin dark web
Sirsmuct says:
darkmarket url drug markets onion
DonnyCop says:
tor markets 2022 tor marketplace
Evawed says:
generic viagra online free shipping
Ivywed says:
buy canadian cialis online
DennyCop says:
darknet drug links tor market
TimKal says:
dark market darknet market lists
Joewed says:
nexium canada price
Ashleybar says:
tor markets 2021 dark market url
RV Sales And Repair Near Me says:
Aw, this was an exceptionally nice post. Finding the time and actual effort to make a good articleÖ but what can I sayÖ I hesitate a whole lot and never manage to get nearly anything done.
Williamliacy says:
darknet marketplace tor markets 2022
Jimwed says:
75 mg viagra
Denwed says:
yasmin 3mg 30mcg price
Kellydum says:
best darknet markets darknet market lists
FelixMip says:
dark web market links dark market link
LennyCop says:
deep web drug markets deep web drug url
Samuelnum says:
dark market tor markets 2021
Josenot says:
dark market 2021 tor markets 2021
Rickvurse says:
darknet markets darknet market list
Versusvurse says:
tor market links tor markets 2021
JennyMip says:
dark market onion deep web drug store
Anoldvurse says:
dark market list tor markets 2022
Versusvurse says:
tor market links deep web drug url
Ricconot says:
darknet markets deep web drug markets
Ivywed says:
tadalafil 80mg
BobbyEvinc says:
tor dark web tor markets 2022
Dezzyvurse says:
dark web market list darknet market list
zithromax 250 mg tablets says:
preslaws azithromycin dosage for cats avarii best price zithromax buy zithromax 250mg – azithromycin tablets usp 250
mg [url=http://zithromax1.quest/#]zithromax with out prescription[/url] noteiktie what is
zithromax good for
LawrenceCop says:
dark web market dark web market links
Dylannot says:
deep web drug url darkmarket link
OzzyMip says:
tor dark web darkmarket link
Diedraovers says:
dark market link darknet market lists
Bobb1Evinc says:
dark market list dark market onion
DavidWhaft says:
dark market 2021 tor market
Sirsmuct says:
deep web drug links dark web market
Johnnot says:
darknet websites drug markets onion
DonnyCop says:
darknet marketplace darkmarket 2022
PedroEvinc says:
darknet drug market darknet drug links
Patrickevali says:
tor markets links dark market 2021
TeddyMip says:
dark web market links darknet market links
JimLib says:
tor marketplace tor market links
Patricktug says:
darkmarket 2022 darknet market
DiamondEvinc says:
darkmarket 2022 dark market 2021
price of cialis in australia says:
tadalafil – generic
DennyCop says:
dark market url darkmarket
Sharylhilla says:
dark market onion dark market onion
Williamliacy says:
darkode reborn tor market
Yonwed says:
generic tadalafil
Rickvurse says:
deep web markets dark web market links
TimKal says:
darknet markets dark market link
Kellydum says:
dark market url darknet drug market
Nickwed says:
tadalafil cheap
FelixMip says:
tor markets links dark market list
Josenot says:
dark web market darkmarket
Sirsmuct says:
darkmarket list darknet drug store
BobbyEvinc says:
darknet drug market deep web drug store
Eyewed says:
cialis buy in canada
LawrenceCop says:
deep web drug links deep web drug store
LennyCop says:
darkmarket bitcoin dark web
Suewed says:
motilium uk buy
Diedraovers says:
dark market darknet market
Versusvurse says:
tor markets 2022 darkmarket 2022
FelixMip says:
deep web drug links darkmarket list
Samuelnum says:
dark0de darknet market dark web link
Anoldvurse says:
dark web market darkmarket
DonnyCop says:
darknet market tor dark web
Dylannot says:
deep web drug url tor dark web
JennyMip says:
darknet market list dark web market
Ivywed says:
cialis 10 mg tablet cost
Patrickevali says:
dark market url dark web markets
Bobb1Evinc says:
tor market links tor markets 2021
Dezzyvurse says:
tor market dark web market
Trailer Repairs says:
A fascinating discussion is definitely worth comment. I think that you need to publish more on this subject matter, it may not be a taboo matter but usually people don’t speak about these issues. To the next! Cheers!!
Johnnot says:
darkmarket 2022 darkmarket list
Wimwed says:
us online pharmacy cialis
DennyCop says:
tor markets 2022 dark market list
DavidWhaft says:
dark market list dark market
TeddyMip says:
dark market link dark market
Ricconot says:
tor dark web darkmarket
JimLib says:
tor marketplace darknet drug links
Nickwed says:
buy generic cialis canada
PedroEvinc says:
dark market deep web drug store
Patricktug says:
darknet websites tor markets links
DiamondEvinc says:
deep web drug links darkmarket list
Williamliacy says:
darknet market dark web market links
Rickvurse says:
deep web drug url darkmarket 2022
Sirsmuct says:
dark web link darknet markets
Nickwed says:
cialis 100mg tablets
LennyCop says:
dark web market list tor market url
LawrenceCop says:
tor market url darknet markets
TimKal says:
dark web market links dark market list
Diedraovers says:
dark market deep web drug store
Anoldvurse says:
dark web market links darknet drug market
Versusvurse says:
tor markets 2021 tor markets links
Miawed says:
how much is viagra in australia
Josenot says:
dark market link dark market onion
BobbyEvinc says:
darkmarket link darkmarket url
DonnyCop says:
dark market 2022 darkmarket list
Patrickevali says:
darknet drug market tor marketplace
Janewed says:
plaquenil eye damage
Evawed says:
sildenafil pills canada
DennyCop says:
tor markets 2022 deep web drug links
Samuelnum says:
dark web markets darknet market links
FelixMip says:
dark web link dark web market list
Dylannot says:
dark market onion darknet market links
Bus Upgrade says:
Having read this I thought it was very informative. I appreciate you finding the time and energy to put this information together. I once again find myself personally spending a significant amount of time both reading and leaving comments. But so what, it was still worthwhile!
JennyMip says:
tor markets links darkmarket
Dezzyvurse says:
dark market list darknet drug store
DonnyCop says:
best darknet markets deep web drug links
DavidWhaft says:
tor market url darknet drug market
Ivywed says:
how much is strattera in canada
Ricconot says:
darknet drug links darkmarket 2022
Bobb1Evinc says:
tor dark web dark markets 2022
Sirsmuct says:
tor marketplace tor marketplace
Williamliacy says:
darkmarket url dark0de link
Samwed says:
cialis best price australia
JimLib says:
darknet drug store dark markets 2022
Rickvurse says:
dark web market darkmarket 2022
DiamondEvinc says:
darknet markets darknet market links
Patricktug says:
dark market onion deep web drug links
Johnnot says:
deep web drug markets darknet marketplace
LennyCop says:
dark web market list darknet market lists
TeddyMip says:
deep web drug url drug markets dark web
PedroEvinc says:
darknet websites dark market link
Kellydum says:
darkmarket tor market
Jackwed says:
order cialis online without prescription
Janewed says:
how much is lisinopril 20 mg
LawrenceCop says:
deep web drug url deep web drug markets
Anoldvurse says:
deep web markets darkmarket url
Diedraovers says:
darknet drug store tor dark web
Sharylhilla says:
dark web drug marketplace dark web link
TimKal says:
drug markets onion dark web markets
Versusvurse says:
darkmarket darkmarket 2022
Jackwed says:
viagra without a rx
BobbyEvinc says:
darknet market list dark web market list
Josenot says:
dark web market links darknet marketplace
DennyCop says:
darknet drug store dark web sites
Samuelnum says:
tor marketplace darknet markets
FelixMip says:
best darknet markets darkmarket link
OzzyMip says:
darknet marketplace dark market 2022
Dylannot says:
darknet drug links deep web drug url
DonnyCop says:
tor market tor market
JennyMip says:
deep web drug links dark market link
DavidWhaft says:
darknet market list darkode url
Ricconot says:
best darknet markets best darknet markets
Bobb1Evinc says:
tor market url dark web sites
JimLib says:
darknet market lists darknet market
DiamondEvinc says:
darknet drug store darkmarket 2021
Rickvurse says:
dark market dark market 2022
LennyCop says:
deep web drug links tor markets 2022
Suewed says:
genuine viagra for sale
Williamliacy says:
darknet drug links dark market link
Patricktug says:
heineken onion deep web drug links
Johnnot says:
darknet drug links tor market
TeddyMip says:
deep web drug store drug markets dark web
PedroEvinc says:
darkmarket 2022 dark market 2022
JamesTralp says:
http://stromectolst.com/# purchase oral ivermectin
stromectol liquid
LawrenceCop says:
darkmarket 2022 tor markets links
Anoldvurse says:
deep web drug store dark market link
Boowed says:
buy viagra cialis
Joewed says:
sildenafil 10 mg price
BobbyEvinc says:
darkmarket 2022 darkmarket url
Patrickevali says:
dark market link dark web markets
Versusvurse says:
darknet market links deep web drug markets
Ashleybar says:
darkmarket list dark market 2022
TimKal says:
dark web markets tor markets links
DennyCop says:
drug markets onion dark web market links
OzzyMip says:
deep web drug store deep web drug links
Josenot says:
tor dark web darknet market lists
Samuelnum says:
dark web market list tor market url
FelixMip says:
darknet websites dark market 2022
Jimwed says:
viagra from canadian pharmacy
Dezzyvurse says:
dark market list tor market links
JennyMip says:
dark markets 2022 tor markets 2021
DonnyCop says:
dark web sites darkmarket 2021
Ashwed says:
can i buy viagra from canada
DavidWhaft says:
darkmarket 2021 dark market 2022
Ricconot says:
darknet websites darknet drug store
Bobb1Evinc says:
deep web drug markets tor markets links
Sirsmuct says:
dark market onion dark0de darknet market
Rickvurse says:
darknet websites deep web drug store
JimLib says:
darknet markets darkmarket list
Patricktug says:
darknet drug market dark web drug marketplace
DiamondEvinc says:
darknet markets deep web drug store
LennyCop says:
darkmarket 2021 tor market url
Johnnot says:
darknet drug links dark market url
TeddyMip says:
drug markets dark web darknet marketplace
PedroEvinc says:
darknet marketplace best darknet markets
Miawed says:
trental tablet
Annawed says:
cialis generic discount
Ugowed says:
viagra lowest price canada
LawrenceCop says:
darknet market links deep web drug markets
Sharylhilla says:
dark web sites tor market links
Patrickevali says:
darknet markets darkmarket
Anoldvurse says:
dark market onion tor market links
BobbyEvinc says:
darknet drug links tor markets links
Versusvurse says:
darkmarket list darkmarket link
Dylannot says:
dark web drug marketplace tor markets 2021
Samuelnum says:
darkmarket 2021 tor marketplace
DennyCop says:
darknet market list darknet market lists
Ashleybar says:
dark web market darknet marketplace
Josenot says:
dark web market links deep web drug markets
TimKal says:
darknet market drug markets dark web
DavidWhaft says:
deep web drug url dark web drug marketplace
Williamliacy says:
darkode link dark market list
FelixMip says:
dark web market tor market links
JennyMip says:
darkmarket link dark market link
DonnyCop says:
tor dark web darkmarket list
for details says:
When someone writes an post he/she maintains the plan ofa user in his/her brain that how a user can be aware of it.Therefore that’s why this article is outstdanding.Thanks!
Dezzyvurse says:
tor markets 2022 tor market
Ricconot says:
deep web drug markets darknet market list
JimLib says:
darknet drug links darknet drug links
Bobb1Evinc says:
darknet drug store tor markets 2021
Rickvurse says:
dark market dark web markets
Johnnot says:
darknet drug store deep web markets
LennyCop says:
darknet market lists tor market links
DiamondEvinc says:
tor markets links tor market url
TeddyMip says:
darknet drug store darknet marketplace
PedroEvinc says:
tor marketplace darknet websites
Miawed says:
viagra 100mg tablet online in india
LawrenceCop says:
tor dark web darkmarket url
OzzyMip says:
dark market link dark web sites
Patrickevali says:
dark market 2022 darkmarket url
Diedraovers says:
deep web drug url bitcoin dark web
BobbyEvinc says:
drug markets onion dark web markets
Samuelnum says:
dark web drug marketplace tor markets links
Versusvurse says:
deep web drug markets dark web market list
buy discount cialis best online says:
buy cialis with paypal
Williamliacy says:
dark markets 2022 dark web market
DavidWhaft says:
dark web market tor markets 2021
DennyCop says:
drug markets dark web dark web drug marketplace
Ashleybar says:
dark market 2021 best darknet markets
Kellydum says:
dark web sites darkmarket 2021
Josenot says:
darknet market list dark market list
TimKal says:
dark web link dark web market
JennyMip says:
tor market links dark market url
DonnyCop says:
deep web drug url dark market 2022
Ricconot says:
darknet markets dark market link
FelixMip says:
darkmarket 2022 deep web drug url
Bobb1Evinc says:
tor market links deep web drug links
Dezzyvurse says:
darkmarket link darknet marketplace
Miawed says:
female viagra online in india
JamesTralp says:
http://stromectolst.com/# ivermectin cream uk
ivermectin lotion cost
Rickvurse says:
dark web market links darkmarket link
Wimwed says:
best price sildenafil uk
Johnnot says:
tor dark web dark market link
Samwed says:
celebrex 200 mg daily
DiamondEvinc says:
darknet marketplace deep web drug links
PedroEvinc says:
tor marketplace dark web link
Kimwed says:
cheap generic viagra 100mg
LennyCop says:
dark web sites darknet market
OzzyMip says:
darkmarket url dark market 2021
Sirsmuct says:
dark web markets dark0de darknet market
Williamliacy says:
darkmarket 2021 darknet drug market
Sharylhilla says:
dark web market dark market link
Suewed says:
[url=https://bestcialispills.monster/]best pharmacy prices for cialis[/url]
LawrenceCop says:
deep web markets darkmarket list
BobbyEvinc says:
tor market drug markets onion
Patrickevali says:
tor market dark web link
Versusvurse says:
deep web drug links best darknet markets
Amywed says:
stromectol price uk
Patricktug says:
deep web drug links dark market url
DennyCop says:
drug markets onion darkmarket list
Anoldvurse says:
darkmarket drug markets dark web
Evawed says:
buy cialis australia
Kiawed says:
celebrex capsules
Ashleybar says:
darknet market dark web markets
Josenot says:
darknet drug market darknet markets
DonnyCop says:
darknet market best darknet markets
JennyMip says:
darknet market lists darkmarket
Ricconot says:
dark markets 2022 dark markets 2022
Bobb1Evinc says:
dark market darknet marketplace
TimKal says:
tor marketplace bitcoin dark web
TeddyMip says:
dark web market dark market 2021
Dezzyvurse says:
tor marketplace dark web drug marketplace
Rickvurse says:
dark market url tor markets links
DavidWhaft says:
darknet market lists deep web drug markets
RV Slide Out Repair Near Me says:
Can I just say what a relief to uncover an individual who really knows what they are talking about on the net. You definitely know how to bring a problem to light and make it important. A lot more people must check this out and understand this side of your story. I can’t believe you aren’t more popular since you surely have the gift.
OzzyMip says:
dark market link drug markets dark web
Dylannot says:
dark market 2022 darknet market links
Wimwed says:
legal generic viagra
Williamliacy says:
darknet drug market deep web markets
DiamondEvinc says:
bitcoin dark web darkmarket list
PedroEvinc says:
tor market url darkmarket 2021
LennyCop says:
dark markets 2022 dark web market
Patricktug says:
darkmarket 2022 dark market
Kellydum says:
dark market link deep web drug url
BobbyEvinc says:
tor markets links darknet drug market
LawrenceCop says:
darknet drug market tor markets 2021
Versusvurse says:
dark market link deep web drug markets
Patrickevali says:
darkmarket url darknet drug links
Diedraovers says:
dark market list darknet market
Janewed says:
cialis from canada
DennyCop says:
dark market link darkmarket
Boowed says:
order sildenafil 100mg
Samuelnum says:
tor marketplace deep web drug markets
DavidWhaft says:
deep web drug links darkode url
Josenot says:
drug markets dark web darkmarket
DonnyCop says:
bitcoin dark web tor market links
Ashleybar says:
dark market link bitcoin dark web
TeddyMip says:
darkmarket 2021 tor dark web
Anoldvurse says:
darknet marketplace dark web drug marketplace
JennyMip says:
tor market deep web drug store
Ricconot says:
best darknet markets bitcoin dark web
Bobb1Evinc says:
darkmarket 2021 darkmarket 2022
TimKal says:
deep web drug store bitcoin dark web
FelixMip says:
deep web markets drug markets dark web
Rickvurse says:
darknet drug store deep web drug store
Jimwed says:
acyclovir medication prices
Dezzyvurse says:
drug markets onion dark market list
OzzyMip says:
darknet market list tor market links
Williamliacy says:
tor markets links dark market
Sharylhilla says:
tor markets 2022 darkmarket link
JimLib says:
tor market links darkmarket
Janewed says:
how much for viagra
Carlwed says:
can i order viagra
PedroEvinc says:
tor market links deep web drug links
DiamondEvinc says:
darknet websites darknet markets
LennyCop says:
dark markets 2022 darkmarket list
BobbyEvinc says:
dark market link darkmarket
Versusvurse says:
darkmarket url tor market url
LawrenceCop says:
darkmarket link darknet drug links
Patrickevali says:
drug markets dark web tor markets 2021
DavidWhaft says:
deep web drug url dark0de url
Jimwed says:
viagra price malaysia
DennyCop says:
dark market url tor market links
Diedraovers says:
deep web markets dark market onion
Johnnot says:
tor markets links darknet websites
Samwed says:
stromectol order
TeddyMip says:
dark web market list darknet drug store
JennyMip says:
drug markets dark web dark web link
Josenot says:
tor market drug markets dark web
Ashleybar says:
drug markets dark web dark web market links
Ricconot says:
darkmarket 2021 darknet market list
Bobb1Evinc says:
darknet marketplace tor markets 2022
Anoldvurse says:
dark market link dark web link
TimKal says:
darkmarket list dark market link
Eyewed says:
tadalafil 10 mg cost
FelixMip says:
darknet websites dark web sites
Rickvurse says:
darkmarket url dark web market list
JimLib says:
darkmarket link dark web markets
Williamliacy says:
dark market link darkmarket link
Yonwed says:
tadalafil tablets 20 mg uk
Dezzyvurse says:
darkmarket dark market list
Sharylhilla says:
darknet market lists https://oniontorrezurl.com/ – dark markets 2022
Ashwed says:
viagra otc price
Evawed says:
tadalafil pills buy online
PedroEvinc says:
darknet drug market https://monopolymarketlinks.com/ – dark web sites
DiamondEvinc says:
dark web market https://worldmarketurltor.com/ – darknet websites
BobbyEvinc says:
darkmarket 2022 https://torrezmarketonion.com/ – dark market onion
https://manuallawnaerator.blogspot.com/ says:
It’s also durable, light-weight and has simple use.
The product includes a foot bar that permits you to experience further leverage because it
takes wing some of the pressure from your shoulders and arms.
Visit my web page; https://manuallawnaerator.blogspot.com/
LennyCop says:
dark market list https://heinekenexpresonion.com/ – dark web markets
LawrenceCop says:
darknet market list https://monopolymarketonline.com/ – drug markets onion
Versusvurse says:
tor marketplace https://versusprojectmarket.com/ – darkmarket url
Samuelnum says:
dark market url https://darkoderebornonion.com/ – dark0de link
Patrickevali says:
darknet marketplace https://torrezmarketwww.com/ – dark market
DennyCop says:
dark web markets https://darkoderebornurl.com/ – deep web drug markets
Annawed says:
synthroid 150 mcg tablet
Diedraovers says:
tor marketplace https://torrezmarketdarknet.com/ – darknet websites
Johnnot says:
tor dark web https://caanahome-market-onion.com/ – dark web link
DonnyCop says:
dark market url https://versusdarkmarkets.com/ – darkmarket 2021
Williamliacy says:
darkmarket link https://darkoderebornlink.com/ – dark web market
Dylannot says:
tor market https://asapmarketurls.com/ – darknet drug links
TimKal says:
dark web market list https://heinekenexpresmarket.com/ – darkmarket url
Ashleybar says:
drug markets onion https://torrezmarketurls.com/ – tor markets links
JennyMip says:
bitcoin dark web https://torrez-market-linkss.com/ – darknet market list
Ricconot says:
darknet market https://torrezlinkonion.com/ – deep web drug links
JimLib says:
tor market links https://heinekenexpresonion.com/ – drug markets onion
TeddyMip says:
darknet drug store https://cannahome-markets.com/ – dark market 2021
Samwed says:
stromectol cost
Josenot says:
tor market https://monopoly-market-onion.com/ – tor market url
Sharylhilla says:
deep web markets https://oniontorrezurl.com/ – darkmarket 2021
Rickvurse says:
dark market 2021 [url=https://heinekenmarket.com/ ]darkmarket list [/url]
Dezzyvurse says:
drug markets onion https://tortorrezmarket.com/ – dark web drug marketplace
Anoldvurse says:
best darknet markets https://monopolymarketurls.com/ – dark web market
FelixMip says:
dark market onion https://monopolymarketwww.com/ – deep web markets
DiamondEvinc says:
dark web link [url=https://worldmarketurltor.com/ ]tor markets 2022 [/url]
LennyCop says:
dark web market https://heinekenexpresonion.com/ – darknet drug market
Patricktug says:
darkmarket https://heinekenexpresshop.com/ – dark web market list
LawrenceCop says:
dark market link https://monopolymarketonline.com/ – deep web drug markets
Jimwed says:
is online viagra real
DavidWhaft says:
darkode reborn link https://darkoderebornurl.com/ – dark web sites
PedroEvinc says:
darkmarket list https://monopoly-market-onion.com/ – darkmarket
Evawed says:
cheap viagra 100
Kellydum says:
darknet drug market https://heinekenmarket.com/ – darkmarket list
Ugowed says:
canadian pharmacy generic sildenafil
Sirsmuct says:
tor market url https://darkoderebornmarkets.com/ – dark0de darknet market
BobbyEvinc says:
tor markets 2021 https://torrezmarketurls.com/ – darknet drug market
Suewed says:
albendazole with no rx
DennyCop says:
darknet market lists https://darkoderebornlink.com/ – deep web drug markets
Patrickevali says:
tor markets 2021 https://torrezmarketwww.com/ – darknet market lists
Diedraovers says:
deep web drug store https://torrezmarketonion.com/ – deep web drug store
Samuelnum says:
dark0de market https://darkoderebornonion.com/ – dark market url
Versusvurse says:
tor market https://worldmarketsonion.com/ – bitcoin dark web
Joewed says:
buy generic cymbalta 60 mg
TimKal says:
best darknet markets https://heinekenexpresmarket.com/ – deep web drug store
DonnyCop says:
darknet drug links https://versusdarknetmarket.com/ – darknet drug links
Dylannot says:
deep web markets https://asapmarketlinks.com/ – darknet websites
Bobb1Evinc says:
dark market onion https://asap-market-onion.com/ – tor market url
Joewed says:
generic viagra from india
Ashleybar says:
dark web market list https://torrezmarketurls.com/ – dark market url
Nickwed says:
viagra price canada
Rickvurse says:
deep web drug markets https://heinekenmarket.com/ – deep web markets
Anoldvurse says:
best darknet markets https://monopolymarketurls.com/ – drug markets dark web
Johnnot says:
darknet websites https://cannahomedarkmarket.com/ – bitcoin dark web
Suewed says:
generic ivermectin
JimLib says:
tor markets 2021 https://heinekenexpresonion.com/ – tor markets links
TeddyMip says:
tor markets 2022 https://cannahomelink.com/ – darknet market links
Josenot says:
darknet drug links https://heineken.express/ – deep web drug markets
JennyMip says:
darkmarket list https://torrez-market-linkss.com/ – dark web market links
Ricconot says:
dark web link https://oniontorrezurl.com/ – darkmarket 2021
Judywed says:
sildenafil citrate 50mg
BobbyEvinc says:
dark market 2022 https://torrezmarketdarknet.com/ – dark web market links
DavidWhaft says:
dark web drug marketplace https://darkoderebornurl.com/ – dark web drug marketplace
DiamondEvinc says:
dark web drug marketplace https://worldmarketsdarknet.com/ – dark market link
Dezzyvurse says:
darknet drug links https://tortorrezmarket.com/ – darknet drug links
FelixMip says:
darkmarket 2022 https://mymonopolymarket.com/ – drug markets onion
LennyCop says:
dark market link https://heinekenexpresonion.com/ – dark web market list
Sirsmuct says:
dark market link https://darkoderebornmarkets.com/ – deep web drug markets
Patrickevali says:
dark web market links https://tortorrezmarket.com/ – tor market
DennyCop says:
darknet drug links https://darkoderebornlink.com/ – darknet marketplace
Nickwed says:
generic cialis coupon
Jasonwed says:
cialis 150 mg
LawrenceCop says:
darknet market https://monopolymarketonline.com/ – dark market url
PedroEvinc says:
darkmarket 2022 https://monopolymarketlinks.com/ – tor market url
Patricktug says:
dark market 2022 https://heinekenexpresshop.com/ – drug markets dark web
Ivywed says:
pink viagra
Samuelnum says:
darkode link https://darkoderebornonion.com/ – dark market onion
Diedraovers says:
darknet drug market https://torrezmarketdarknet.com/ – tor marketplace
Williamliacy says:
drug markets onion https://darkoderebornlink.com/ – dark web drug marketplace
TimKal says:
deep web drug markets https://heinekenexpresmarket.com/ – deep web markets
Versusvurse says:
tor market url https://versusprojectmarket.com/ – darknet drug links
Kellydum says:
darkmarket https://heinekenmarket.com/ – dark web market
Bobb1Evinc says:
dark market list https://asapmarketonion.com/ – deep web drug links
DonnyCop says:
darknet websites https://versusdarkmarkets.com/ – darkmarket
DennyCop says:
dark market onion https://darkoderebornmarkets.com/ – tor market url
Anoldvurse says:
dark market 2021 https://monopolymarketwww.com/ – dark web link
Rickvurse says:
dark market https://heinekenexpresshop.com/ – drug markets dark web
OzzyMip says:
dark web market https://versusdarkmarket.com/ – dark web sites
Suewed says:
best price viagra uk
Miawed says:
cialis online prescription order
JimLib says:
darknet drug market https://heinekenexpresonion.com/ – darknet drug store
Miawed says:
cialis generic pills
Dezzyvurse says:
tor markets 2022 https://darkoderebornonion.com/ – dark market list
LennyCop says:
darkmarket https://heinekenexpresonion.com/ – tor markets 2021
Sirsmuct says:
dark0de darknet market https://darkoderebornmarkets.com/ – darknet markets
Johnnot says:
deep web drug store https://cannahomemarket24.com/ – bitcoin dark web
DavidWhaft says:
darkmarket 2021 https://darkoderebornurl.com/ – dark market list
DiamondEvinc says:
darknet drug store https://worldmarketlinktor.com/ – deep web drug markets
Josenot says:
darknet marketplace https://heineken.express/ – tor markets links
TeddyMip says:
deep web markets https://cannahomeurl.com/ – tor market url
Carlwed says:
online cipro
JennyMip says:
dark web sites https://torrez-market-onion.com/ – tor marketplace
Ricconot says:
deep web drug links https://oniontorrezurl.com/ – tor market
BobbyEvinc says:
darknet market lists https://torrezmarketurls.com/ – dark market list
Patrickevali says:
darknet drug market https://torrezmarketwww.com/ – dark market list
FelixMip says:
darkmarket 2021 https://mymonopolymarket.com/ – deep web drug links
Samuelnum says:
darkmarket list https://darkoderebornonion.com/ – darkode reborn link
LawrenceCop says:
darknet drug links https://mymonopolymarket.com/ – darknet market list
TimKal says:
darknet drug links https://heinekenexpresmarket.com/ – drug markets dark web
Zakwed says:
price of tadalafil 20mg
Ivywed says:
rx cialis canada
DennyCop says:
tor market url https://darkoderebornlink.com/ – dark web market list
Rickvurse says:
dark market list https://heinekenmarket.com/ – dark web drug marketplace
Kimwed says:
viagra 25 mg tablet buy online
DonnyCop says:
darknet market https://versusdarknetmarket.com/ – best darknet markets
Versusvurse says:
tor markets 2021 https://versusprojectmarket.com/ – deep web drug markets
Bobb1Evinc says:
dark market link https://asap-market.com/ – darknet market links
PedroEvinc says:
drug markets onion https://monopoly-market-onion.com/ – dark web link
Patricktug says:
darknet market https://heinekenexpresshop.com/ – darkmarket 2021
Kimwed says:
viagra online purchase usa
Williamliacy says:
deep web markets https://darkoderebornlink.com/ – deep web drug store
Anoldvurse says:
dark market https://monopolymarketwww.com/ – tor market links
JimLib says:
heineken onion https://heinekenexpresonion.com/ – tor marketplace
DavidWhaft says:
dark market https://darkoderebornurl.com/ – darkmarket url
Samwed says:
ivermectin in india
Kellydum says:
deep web drug url https://heinekenmarket.com/ – bitcoin dark web
Dezzyvurse says:
darknet market list https://torrezmarketwww.com/ – darknet drug links
Sirsmuct says:
dark web market links https://darkoderebornmarkets.com/ – dark markets 2022
Johnnot says:
dark web market links https://caanahome-market-onion.com/ – deep web drug links
Dylannot says:
tor market https://versus-markets.com/ – dark web market list
OzzyMip says:
deep web drug store https://versus-market-onion.com/ – dark market url
LennyCop says:
tor market links https://torrez-onion.com/ – darknet market lists
Patrickevali says:
darknet marketplace https://tortorrezmarket.com/ – darkmarket
Sharylhilla says:
tor marketplace https://oniontorrezurl.com/ – dark web link
JennyMip says:
tor markets 2021 https://torrez-market-urls.com/ – dark web drug marketplace
DiamondEvinc says:
darkmarket 2022 https://worldmarketurltor.com/ – dark market 2022
Ricconot says:
tor market url https://torrezlinkonion.com/ – dark web market
TeddyMip says:
dark web drug marketplace https://cannahomelink.com/ – dark web link
LawrenceCop says:
dark market url https://monopolymarketonline.com/ – deep web drug links
BobbyEvinc says:
darknet marketplace https://torrezmarketurls.com/ – dark market list
Samwed says:
generic viagra price comparison
TimKal says:
dark web markets https://heinekenexpresmarket.com/ – dark web market list
DennyCop says:
dark market https://darkoderebornmarkets.com/ – darknet drug links
Josenot says:
best darknet markets https://heineken.express/ – darknet drug store
Rickvurse says:
darkmarket https://asapmarket-onion.com/ – dark web market links
Samuelnum says:
deep web drug url https://darkoderebornonion.com/ – darknet marketplace
Samwed says:
can you buy viagra in mexico
Versusvurse says:
darknet marketplace https://worldonionmarketplace.com/ – tor markets 2022
FelixMip says:
drug markets dark web https://monopolymarketwww.com/ – darknet drug market
DonnyCop says:
darknet markets https://versusdarknetmarket.com/ – dark market link
PedroEvinc says:
dark market list https://monopolymarketlinks.com/ – deep web markets
Kiawed says:
cialis rx
Sirsmuct says:
bitcoin dark web https://darkoderebornmarkets.com/ – dark market link
Bobb1Evinc says:
dark market 2022 https://asap-market.com/ – dark market onion
Patricktug says:
dark web market links https://heinekenexpresshop.com/ – darknet drug market
Van Sound says:
Hi, I do believe this is an excellent web site. I stumbledupon it 😉 I’m going to return yet again since I book marked it. Money and freedom is the greatest way to change, may you be rich and continue to guide other people.
DavidWhaft says:
dark web market list https://darkoderebornurl.com/ – deep web drug links
JimLib says:
darknet websites https://heinekenexpresonion.com/ – tor market
Kimwed says:
cialis for daily use 5 mg cost
Williamliacy says:
darkmarket 2022 https://darkoderebornlink.com/ – darkmarket url
LennyCop says:
dark web market list https://heinekenexpresmarket.com/ – darknet drug market
Jackwed says:
tadalafil brand name
inflatable rentals Dallas says:
Other write-ups where Manganese steel is reviewed: steel: Wear-resistant steels: Manganese steels are frequently called Hadfield steels, after their developer, Robert Hadfield.
Ashleybar says:
tor marketplace https://torrezmarketurls.com/ – dark market url
Kellydum says:
dark web sites https://heinekenmarket.com/ – dark market onion
Dezzyvurse says:
deep web drug store https://tortorrezmarket.com/ – darkmarket list
Johnnot says:
dark markets 2022 https://cannahomemarket24.com/ – drug markets onion
Jackwed says:
cymbalta generic discount
Annawed says:
viagra tablet online order
Dylannot says:
darknet drug market https://asapmarketurls.com/ – dark market
BobbyEvinc says:
darkmarket 2022 https://torrezmarketurls.com/ – darknet marketplace
Evawed says:
purchase viagra online canada
TimKal says:
drug markets dark web https://heinekenexpresmarket.com/ – darkmarket list
LawrenceCop says:
dark market url https://mymonopolymarket.com/ – darknet marketplace
JennyMip says:
dark web link https://torrez-market-onion.com/ – dark web drug marketplace
Versusvurse says:
dark web market links https://worldmarketsonion.com/ – tor markets 2021
Evawed says:
can i buy cipro in mexico
DennyCop says:
tor market url https://darkoderebornmarkets.com/ – dark web link
Rickvurse says:
dark market onion https://asapmarket-onion.com/ – tor markets links
Ricconot says:
dark market list https://torrezlinkonion.com/ – darkmarket
DiamondEvinc says:
dark market onion https://worldmarketlinktor.com/ – darkmarket url
TeddyMip says:
deep web drug store https://cannahomelink.com/ – tor marketplace
Jackwed says:
where to buy tadalafil 20mg
Samuelnum says:
dark web drug marketplace https://darkoderebornonion.com/ – darkode link
DonnyCop says:
dark web market list https://versusdarkmarkets.com/ – tor marketplace
Sirsmuct says:
darkmarket list https://darkoderebornmarkets.com/ – darknet market list
Josenot says:
dark web markets https://monopoly-market-onion.com/ – best darknet markets
Diedraovers says:
deep web drug markets https://torrezmarketonion.com/ – darknet marketplace
PedroEvinc says:
darknet market lists https://monopoly-market-onion.com/ – darknet drug store
Williamliacy says:
darknet drug store https://darkoderebornlink.com/ – darknet drug market
Patrickevali says:
tor market url https://tortorrezmarket.com/ – darknet marketplace
DavidWhaft says:
darkmarket https://darkoderebornurl.com/ – darkode market
Anoldvurse says:
darknet drug store https://monopolymarketwww.com/ – tor markets links
JimLib says:
darkmarket 2022 https://heinekenexpresonion.com/ – dark markets 2022
Bobb1Evinc says:
dark market https://asap-market.com/ – darkmarket 2022
Patricktug says:
drug markets dark web https://heinekenexpresshop.com/ – tor markets 2021
FelixMip says:
darkmarket list https://monopolymarketlinks.com/ – deep web drug links
Boowed says:
canada cialis 20 mg
Ashleybar says:
deep web drug store https://torrezmarketlinkwww.com/ – deep web markets
LennyCop says:
darkmarket link https://heinekenexpresmarket.com/ – dark web market list
Dezzyvurse says:
drug markets onion https://darkoderebornonion.com/ – darknet market lists
Johnnot says:
dark market url https://cannahomemarket24.com/ – deep web drug store
BobbyEvinc says:
darkmarket link https://torrezmarketonion.com/ – dark web market
Kellydum says:
darkmarket link https://heinekenmarket.com/ – bitcoin dark web
TimKal says:
darknet marketplace https://heinekenexpresmarket.com/ – darknet drug store
Dylannot says:
darknet drug store https://asapmarketurls.com/ – darknet market
LawrenceCop says:
darknet market https://mymonopolymarket.com/ – darknet market links
Rickvurse says:
dark market url https://asapmarket-onion.com/ – tor markets 2022
Versusvurse says:
drug markets onion https://worldmarketsonion.com/ – tor market
Amywed says:
amitriptyline 5mg tablet
DennyCop says:
deep web drug markets https://darkoderebornurl.com/ – darkmarket list
TeddyMip says:
dark market url https://cannahomeurl.com/ – tor markets links
Sirsmuct says:
dark market 2021 https://darkoderebornmarkets.com/ – deep web drug store
JennyMip says:
tor markets 2021 https://torrez-market-onion.com/ – tor markets 2022
Joewed says:
antabuse price in india
Ricconot says:
tor market links https://torrezmarketlinkwww.com/ – drug markets onion
Diedraovers says:
dark web markets https://torrezmarketonion.com/ – deep web markets
Samuelnum says:
darknet market links https://darkoderebornonion.com/ – dark market onion
DavidWhaft says:
darknet drug store https://darkoderebornurl.com/ – dark market list
DonnyCop says:
darkmarket list https://versus-dark-market.com/ – tor dark web
Williamliacy says:
dark web drug marketplace https://darkoderebornlink.com/ – tor market
Markwed says:
cialis otc canada
Patrickevali says:
dark market url https://torrezmarketwww.com/ – dark web market
LennyCop says:
dark web sites https://torrez-onion.com/ – drug markets onion
Josenot says:
dark web drug marketplace https://monopoly-market-onion.com/ – dark market 2021
Ashleybar says:
bitcoin dark web https://torrezmarketlinkwww.com/ – tor dark web
PedroEvinc says:
dark market 2021 https://monopolymarketlinks.com/ – bitcoin dark web
Anoldvurse says:
deep web drug markets https://monopolymarketwww.com/ – drug markets onion
Dezzyvurse says:
dark web market https://tortorrezmarket.com/ – darkmarket 2022
JimLib says:
tor markets links https://heinekenexpresonion.com/ – darkmarket link
Annawed says:
200 mg viagra india
Joewed says:
valtrex online usa
Bobb1Evinc says:
tor markets 2021 https://asap-market.com/ – darknet market links
Annawed says:
acticin cream
Patricktug says:
darknet market https://heinekenexpresshop.com/ – dark markets 2022
LawrenceCop says:
dark market 2021 https://monopolymarketonline.com/ – tor dark web
FelixMip says:
darkmarket 2021 https://monopoly-market-onion.com/ – drug markets dark web
Kimwed says:
sildenafil best price
BobbyEvinc says:
tor market [url=https://torrezmarketurls.com/ ]tor markets 2022 [/url]
DiamondEvinc says:
tor marketplace https://worldmarketurltor.com/ – tor dark web
OzzyMip says:
darkmarket 2022 https://versusdarkmarket.com/ – dark web link
DennyCop says:
darknet marketplace https://darkoderebornmarkets.com/ – dark market 2021
Sirsmuct says:
tor markets 2022 https://darkoderebornmarkets.com/ – darknet market
Johnnot says:
deep web drug links https://caanahome-market-onion.com/ – tor market url
Sharylhilla says:
darkmarket 2021 https://oniontorrezurl.com/ – tor markets links
Versusvurse says:
tor markets 2022 https://worldmarketsonion.com/ – best darknet markets
Rickvurse says:
dark market 2021 https://heinekenmarket.com/ – darknet marketplace
Kellydum says:
dark web sites https://heinekenmarket.com/ – dark market url
Camper Cameras says:
Right here is the perfect website for everyone who wishes to find out about this topic. You understand so much its almost tough to argue with you (not that I personally would want toÖHaHa). You definitely put a new spin on a topic that’s been discussed for decades. Wonderful stuff, just wonderful!
Samwed says:
tadalafil lowest price
Paulwed says:
cialis soft gel
Samuelnum says:
darkode market https://darkoderebornonion.com/ – dark market
JennyMip says:
dark market link https://torrez-market-urls.com/ – deep web drug markets
DavidWhaft says:
deep web drug markets https://darkoderebornurl.com/ – tor marketplace
Ricconot says:
darkmarket https://oniontorrezurl.com/ – dark market url
LennyCop says:
tor market url https://heinekenexpresmarket.com/ – deep web drug store
Patrickevali says:
dark market link https://tortorrezmarket.com/ – tor market
TimKal says:
darknet market list https://heinekenexpresmarket.com/ – dark market list
TeddyMip says:
darknet market lists https://cannahome-markets.com/ – darknet websites
DonnyCop says:
darkmarket 2021 https://versus-dark-market.com/ – tor marketplace
Williamliacy says:
tor market url https://darkoderebornlink.com/ – darknet markets
Dezzyvurse says:
tor market url https://darkoderebornonion.com/ – tor markets 2021
Ashleybar says:
darkmarket url https://torrezmarketurls.com/ – darknet markets
Miawed says:
baclofen india
LawrenceCop says:
darkmarket list https://mymonopolymarket.com/ – tor markets links
Janewed says:
generic benicar hct
Anoldvurse says:
dark web link https://monopolymarketurls.com/ – drug markets dark web
JimLib says:
drug markets onion https://heinekenexpresonion.com/ – dark web drug marketplace
Lisawed says:
professional cialis
Ivywed says:
where can i buy stromectol
Josenot says:
tor dark web https://heineken.express/ – tor markets links
PedroEvinc says:
darkmarket 2021 https://monopoly-market-onion.com/ – tor markets 2021
Diedraovers says:
dark market list https://torrezmarketdarknet.com/ – dark market list
Teowed says:
viagra otc price
Bobb1Evinc says:
dark web sites https://asap-market.com/ – tor market
Patricktug says:
darknet drug store https://heinekenexpresshop.com/ – tor market links
Sirsmuct says:
best darknet markets https://darkoderebornmarkets.com/ – dark0de darknet market
Sharylhilla says:
tor marketplace https://oniontorrezurl.com/ – deep web drug store
Versusvurse says:
darknet market links https://versusprojectmarket.com/ – tor markets links
DiamondEvinc says:
dark market url https://worldmarketlinktor.com/ – dark market
BobbyEvinc says:
bitcoin dark web https://torrezmarketonion.com/ – drug markets onion
Miawed says:
generic sildenafil from india
DennyCop says:
tor dark web https://darkoderebornurl.com/ – darkmarket
Yonwed says:
where to buy cheap generic viagra
FelixMip says:
deep web drug links https://monopoly-market-onion.com/ – deep web markets
Johnnot says:
dark web market links https://caanahome-market-onion.com/ – tor dark web
LennyCop says:
darknet drug store https://torrez-onion.com/ – tor markets 2021
Rickvurse says:
deep web drug url https://heinekenmarket.com/ – dark web market
Janewed says:
cialis canada pharmacy online
Dylannot says:
darknet markets https://asapmarketlinks.com/ – darknet websites
OzzyMip says:
dark web market list https://versusdarkwebmarket.com/ – tor marketplace
DavidWhaft says:
dark market onion https://darkoderebornurl.com/ – darknet drug store
Samuelnum says:
darkode reborn https://darkoderebornonion.com/ – dark0de url
Kellydum says:
darkmarket https://heinekenmarket.com/ – deep web markets
Patrickevali says:
dark market link https://torrezmarketwww.com/ – deep web drug url
Williamliacy says:
tor markets 2021 https://darkoderebornlink.com/ – dark market onion
TeddyMip says:
tor market url https://cannahomelink.com/ – dark market 2021
DonnyCop says:
darknet marketplace https://versusdarkmarkets.com/ – darkmarket 2021
Dezzyvurse says:
darknet websites https://darkoderebornonion.com/ – deep web drug url
JennyMip says:
deep web drug markets https://torrez-market-urls.com/ – darknet markets
Ashleybar says:
dark market 2021 https://torrezmarketlinkwww.com/ – dark web market list
Ricconot says:
tor marketplace https://torrezmarketlinkwww.com/ – drug markets onion
TimKal says:
darkmarket link https://heinekenexpresmarket.com/ – tor markets 2022
JimLib says:
darkmarket https://heinekenexpresonion.com/ – dark market link
Anoldvurse says:
tor dark web https://monopolymarketwww.com/ – darkmarket link
LawrenceCop says:
dark web market https://mymonopolymarket.com/ – drug markets onion
Diedraovers says:
dark market onion https://torrezmarketdarknet.com/ – darknet market lists
Jackwed says:
how much is bupropion
DennyCop says:
darknet websites https://darkoderebornurl.com/ – darknet market list
Janewed says:
flagyl 500 tablet
Sirsmuct says:
darkmarket 2021 https://darkoderebornmarkets.com/ – darkode reborn link
DiamondEvinc says:
darknet drug market https://worldmarketlinktor.com/ – darkmarket
Sharylhilla says:
deep web markets https://oniontorrezurl.com/ – deep web markets
Rickvurse says:
dark market url https://heinekenmarket.com/ – darkmarket 2021
Versusvurse says:
dark web market links https://worldmarketsonion.com/ – dark web market links
Jackwed says:
buy paxil online
Patricktug says:
darknet drug links https://heinekenexpresshop.com/ – dark market
Evawed says:
how to get cialis prescription australia
Kiawed says:
where can i buy viagra otc
Josenot says:
dark web link https://heineken.express/ – tor marketplace
PedroEvinc says:
dark web market links https://monopoly-market-onion.com/ – dark market 2022
LennyCop says:
darknet market list https://heinekenexpresmarket.com/ – dark web drug marketplace
Bobb1Evinc says:
tor marketplace https://asap-market-onion.com/ – tor marketplace
Williamliacy says:
drug markets dark web https://darkoderebornlink.com/ – tor marketplace
BobbyEvinc says:
best darknet markets https://torrezmarketonion.com/ – deep web markets
Nickwed says:
buy paxil without a prescription
FelixMip says:
dark market 2022 https://monopoly-market-onion.com/ – dark market
Johnnot says:
tor dark web https://cannahomedarkmarket.com/ – drug markets dark web
DavidWhaft says:
tor market https://darkoderebornurl.com/ – tor markets 2021
Patrickevali says:
darknet market list https://tortorrezmarket.com/ – drug markets dark web
Samuelnum says:
dark market 2021 https://darkoderebornonion.com/ – darknet drug links
Paulwed says:
buy cialis 2.5 mg online
DonnyCop says:
dark market 2021 https://versus-dark-market.com/ – dark web markets
Dezzyvurse says:
dark web drug marketplace https://torrezmarketwww.com/ – deep web drug links
OzzyMip says:
dark web market links https://versusdarkmarket.com/ – dark market link
TeddyMip says:
darkmarket 2022 https://cannahome-markets.com/ – darknet market list
TimKal says:
darkmarket link https://heinekenexpresmarket.com/ – tor market
LawrenceCop says:
tor markets 2021 https://monopolymarketonline.com/ – deep web markets
Ashleybar says:
tor markets 2021 https://torrezmarketurls.com/ – darknet websites
JimLib says:
tor market links https://heinekenexpresonion.com/ – darkmarket list
Joewed says:
where to buy ivermectin pills
JennyMip says:
deep web markets https://torrez-market-onion.com/ – darknet market
Ricconot says:
tor market https://oniontorrezurl.com/ – dark web market
Sirsmuct says:
darknet drug market https://darkoderebornmarkets.com/ – dark web link
DennyCop says:
darkmarket url https://darkoderebornurl.com/ – darknet market list
Anoldvurse says:
dark market list https://monopolymarketwww.com/ – dark web market
Rickvurse says:
dark web market links https://asapmarket-onion.com/ – darknet drug store
Sharylhilla says:
darknet market lists https://torrezlinkonion.com/ – tor market url
Versusvurse says:
bitcoin dark web https://worldmarketsonion.com/ – dark web market
Denwed says:
ivermectin pills
DiamondEvinc says:
drug markets onion https://worldmarketurltor.com/ – dark market onion
LennyCop says:
tor market https://heinekenexpresmarket.com/ – dark web drug marketplace
Ivywed says:
price of stromectol
Patricktug says:
tor market https://heinekenexpresshop.com/ – tor dark web
Nickwed says:
baclofen 025
Williamliacy says:
darknet market https://darkoderebornlink.com/ – tor markets links
Tedwed says:
seroquel 200 pill
Josenot says:
dark web market https://monopoly-market-onion.com/ – dark web market
DavidWhaft says:
tor market url https://darkoderebornurl.com/ – darknet market links
PedroEvinc says:
drug markets onion https://monopoly-market-onion.com/ – tor market url
Patrickevali says:
deep web drug links https://torrezmarketwww.com/ – deep web drug store
Bobb1Evinc says:
darknet market lists https://asapmarketonion.com/ – darknet marketplace
Samuelnum says:
darkode link https://darkoderebornonion.com/ – dark market link
Johnnot says:
deep web drug url https://cannahomedarkmarket.com/ – deep web drug links
BobbyEvinc says:
darknet drug store https://torrezmarketdarknet.com/ – deep web drug store
TimKal says:
dark web sites https://heinekenexpresmarket.com/ – dark web market links
FelixMip says:
dark markets 2022 https://monopolymarketonline.com/ – dark market 2021
LawrenceCop says:
darkmarket link https://mymonopolymarket.com/ – dark web markets
Dylannot says:
deep web drug markets https://asapmarketurls.com/ – darknet market
amazon says:
canadian pharmacy no scripts – canadian pharmacy ltd canadian pharmacy world coupon code
Dezzyvurse says:
deep web drug store https://tortorrezmarket.com/ – darknet drug market
DonnyCop says:
dark market 2022 https://versusdarknetmarket.com/ – tor markets 2022
Kimwed says:
plavix brand
Ashleybar says:
deep web drug links https://torrezmarketurls.com/ – tor market url
Diedraovers says:
dark web market https://torrezmarketdarknet.com/ – deep web drug url
Jackwed says:
cheapest tadalafil
DennyCop says:
dark market url https://darkoderebornmarkets.com/ – darkmarket url
Sirsmuct says:
darknet market list https://darkoderebornmarkets.com/ – tor markets links
JennyMip says:
tor markets 2021 https://torrez-market-urls.com/ – tor markets links
Ricconot says:
deep web markets https://oniontorrezurl.com/ – tor marketplace
Kellydum says:
dark web market links https://heinekenmarket.com/ – deep web drug links
Sharylhilla says:
tor market links https://torrezlinkonion.com/ – drug markets dark web
Kiawed says:
buy generic cialis fast shipping
Rickvurse says:
tor dark web https://heinekenmarket.com/ – dark market 2022
Versusvurse says:
dark market url https://versusprojectmarket.com/ – deep web drug store
Paulwed says:
ivermectin pills
LennyCop says:
darknet websites https://heinekenexpresmarket.com/ – drug markets dark web
Anoldvurse says:
dark web market list https://monopolymarketurls.com/ – darknet market list
Annawed says:
viagra generic 50 mg
TimKal says:
tor market links https://heinekenexpresmarket.com/ – darknet marketplace
DiamondEvinc says:
darknet drug store https://worldmarketurltor.com/ – darkmarket link
DavidWhaft says:
dark web drug marketplace https://darkoderebornurl.com/ – darkmarket url
Alanwed says:
ivermectin 1 topical cream
Janewed says:
cialis gel caps
Patrickevali says:
deep web drug url https://tortorrezmarket.com/ – tor market url
LawrenceCop says:
deep web drug url https://monopolymarketonline.com/ – dark web market list
Josenot says:
tor dark web https://monopoly-market-onion.com/ – dark market 2022
Patricktug says:
dark web market links https://heinekenexpresshop.com/ – dark web link
DonnyCop says:
tor dark web https://versusdarknetmarket.com/ – darknet marketplace
Samuelnum says:
tor markets 2021 https://darkoderebornonion.com/ – darknet market list
Ashleybar says:
darkmarket link https://torrezmarketurls.com/ – drug markets dark web
JamesJAW says:
https://stromectolis.com/# stromectol ireland
Bobb1Evinc says:
tor dark web https://asapmarketonion.com/ – deep web drug store
Johnnot says:
drug markets dark web https://cannahomedarkmarket.com/ – tor markets links
OzzyMip says:
darkmarket url https://versusdarkwebmarket.com/ – best darknet markets
Dezzyvurse says:
darkmarket link https://torrezmarketwww.com/ – tor market links
DennyCop says:
dark market link https://darkoderebornmarkets.com/ – dark web link
FelixMip says:
dark market https://monopoly-market-onion.com/ – best darknet markets
Sirsmuct says:
deep web drug links https://darkoderebornmarkets.com/ – dark market onion
BobbyEvinc says:
darknet drug links https://torrezmarketurls.com/ – tor dark web
Ugowed says:
sildenafil 200mg price
Teowed says:
ivermectin canada
Suewed says:
tadalafil 5 mg tablet
TeddyMip says:
darkmarket https://cannahomeurl.com/ – dark market link
Sharylhilla says:
deep web drug url https://torrezlinkonion.com/ – deep web drug store
Rickvurse says:
dark market url https://heinekenexpresshop.com/ – dark web market
Kellydum says:
darknet market https://heinekenmarket.com/ – darknet market
JennyMip says:
darkmarket link https://torrez-market-onion.com/ – darknet markets
JimLib says:
dark market onion https://heinekenexpresonion.com/ – heineken onion
LennyCop says:
darkmarket list https://torrez-onion.com/ – darknet websites
Jimwed says:
buy cialis no prescription
Ricconot says:
darknet drug links https://torrezmarketlinkwww.com/ – tor dark web
TimKal says:
drug markets dark web https://heinekenexpresmarket.com/ – drug markets onion
DavidWhaft says:
dark web market list https://darkoderebornurl.com/ – darkmarket 2021
Versusvurse says:
dark market 2022 https://worldmarketsonion.com/ – darknet markets
Zakwed says:
cialis 10 mg online
Anoldvurse says:
dark market url https://monopolymarketurls.com/ – darkmarket link
LawrenceCop says:
darkmarket 2022 https://mymonopolymarket.com/ – darknet market
DiamondEvinc says:
darknet market list https://worldmarketlinktor.com/ – darknet drug links
Patrickevali says:
dark web market https://torrezmarketwww.com/ – drug markets onion
Judywed says:
viagra online prescription uk
DonnyCop says:
drug markets onion https://versusdarkmarkets.com/ – deep web drug store
Williamliacy says:
darknet market list https://darkoderebornlink.com/ – dark market 2021
Ashleybar says:
dark market https://torrezmarketlinkwww.com/ – tor markets 2022
DennyCop says:
tor marketplace https://darkoderebornlink.com/ – best darknet markets
Patricktug says:
dark web sites https://heinekenexpresshop.com/ – darknet market links
Sirsmuct says:
dark market 2021 https://darkoderebornmarkets.com/ – darknet market
Dylannot says:
dark web market links https://asapmarketurls.com/ – darkmarket url
Johnnot says:
dark market onion https://cannahomedarkmarket.com/ – darknet drug links
Markwed says:
medication singulair 10 mg
PedroEvinc says:
darkmarket https://monopolymarketlinks.com/ – deep web drug markets
Josenot says:
deep web drug url https://heineken.express/ – dark market url
Dezzyvurse says:
tor market links https://tortorrezmarket.com/ – dark web markets
BobbyEvinc says:
darknet drug store https://torrezmarketurls.com/ – darknet drug links
FelixMip says:
drug markets dark web https://monopolymarketwww.com/ – dark web market links
Boowed says:
triamterene/hctz 37.5
LennyCop says:
darknet market lists https://torrez-onion.com/ – darknet drug market
Rickvurse says:
deep web drug url https://asapmarket-onion.com/ – tor markets 2021
Sharylhilla says:
darkmarket 2022 https://oniontorrezurl.com/ – best darknet markets
TeddyMip says:
dark web drug marketplace https://cannahomeurl.com/ – deep web drug links
TimKal says:
drug markets dark web https://heinekenexpresmarket.com/ – dark web sites
JennyMip says:
dark market 2021 https://torrez-market-linkss.com/ – dark web drug marketplace
Ricconot says:
deep web drug url https://torrezlinkonion.com/ – tor markets 2021
Kellydum says:
dark market 2022 https://heinekenmarket.com/ – dark web drug marketplace
Joewed says:
40 mg generic cialis
JimLib says:
drug markets dark web https://heinekenexpresonion.com/ – tor market url
Janewed says:
where can i buy augmentin
Versusvurse says:
dark market link https://worldonionmarketplace.com/ – dark market link
DavidWhaft says:
darknet markets https://darkoderebornurl.com/ – tor market
Patrickevali says:
darknet market list https://tortorrezmarket.com/ – tor market links
LawrenceCop says:
dark market url https://mymonopolymarket.com/ – dark market link
Sirsmuct says:
darkode market https://darkoderebornmarkets.com/ – tor market url
Diedraovers says:
drug markets onion https://torrezmarketonion.com/ – darkmarket list
DonnyCop says:
deep web drug url https://versusdarknetmarket.com/ – tor market links
Anoldvurse says:
darknet drug store https://monopolymarketurls.com/ – deep web drug markets
Jackwed says:
purchase cialis online
Williamliacy says:
dark markets 2022 https://darkoderebornlink.com/ – darkode market
Joewed says:
piroxicam 20 mg capsules
OzzyMip says:
darknet drug market https://versus-market-onion.com/ – dark web market
Annawed says:
canadian generic cialis pharmacy
Ashleybar says:
dark market url https://torrezmarketurls.com/ – darknet markets
DennyCop says:
dark market url https://darkoderebornurl.com/ – dark web market list
Lisawed says:
cialis 20mg canada
DiamondEvinc says:
dark market link https://worldmarketurltor.com/ – darkmarket url
Samuelnum says:
dark market 2021 https://darkoderebornonion.com/ – darkode reborn
Dezzyvurse says:
tor markets 2022 https://torrezmarketwww.com/ – darknet market links
Evawed says:
tadalafil united states
Patricktug says:
dark web markets https://heinekenexpresshop.com/ – darkmarket link
LennyCop says:
darknet market https://torrez-onion.com/ – darkmarket 2022
PedroEvinc says:
darknet marketplace https://monopolymarketlinks.com/ – dark market onion
Josenot says:
tor market https://heineken.express/ – darknet drug links
Jasonwed says:
no prescription cialis
Johnnot says:
deep web drug url https://cannahomedarkmarket.com/ – tor market
BobbyEvinc says:
deep web drug links https://torrezmarketonion.com/ – dark web drug marketplace
FelixMip says:
tor markets 2022 https://monopolymarketwww.com/ – darknet drug store
Sharylhilla says:
drug markets onion https://oniontorrezurl.com/ – dark web market list
TimKal says:
tor markets 2021 https://heinekenexpresmarket.com/ – dark markets 2022
Suewed says:
how to buy stromectol
Rickvurse says:
dark web drug marketplace https://heinekenmarket.com/ – dark market onion
TeddyMip says:
tor marketplace https://cannahome-markets.com/ – tor marketplace
JamesJAW says:
https://stromectolis.com/# stromectol covid 19
Sirsmuct says:
dark market link https://darkoderebornmarkets.com/ – dark0de darknet market
Patrickevali says:
deep web drug store https://torrezmarketwww.com/ – bitcoin dark web
Versusvurse says:
darknet websites https://worldmarketsonion.com/ – dark market url
LawrenceCop says:
tor markets links https://monopolymarketonline.com/ – dark market link
Jacked Reviews says:
Hello! I just would like to give an enormous thumbs up for the good data you’ve right here on this post. I shall be coming back to your blog for extra soon.
DavidWhaft says:
dark market onion https://darkoderebornurl.com/ – darknet markets
JimLib says:
dark web market links https://heinekenexpresonion.com/ – heineken onion
Kellydum says:
drug markets onion https://heinekenmarket.com/ – tor markets 2021
loveawake.ru says:
Welcome to the world of adult Dating loveawake.ru
Williamliacy says:
darknet drug market https://darkoderebornlink.com/ – dark markets 2022
DonnyCop says:
darkmarket list https://versusdarknetmarket.com/ – best darknet markets
JennyMip says:
dark web markets https://torrez-market-onion.com/ – drug markets dark web
Ricconot says:
darkmarket https://oniontorrezurl.com/ – darknet market lists
Diedraovers says:
dark web link https://torrezmarketonion.com/ – dark market 2022
Anoldvurse says:
dark web market https://monopolymarketurls.com/ – dark web drug marketplace
DennyCop says:
deep web drug links https://darkoderebornurl.com/ – darknet market lists
Ashleybar says:
tor markets 2022 https://torrezmarketurls.com/ – dark market
Samuelnum says:
deep web drug store https://darkoderebornonion.com/ – dark web sites
Dylannot says:
darkmarket 2021 https://versus-markets.com/ – darknet drug store
DiamondEvinc says:
tor market links https://worldmarketurltor.com/ – tor markets links
OzzyMip says:
darknet drug store https://versusdarkwebmarket.com/ – tor marketplace
LennyCop says:
darkmarket url https://heinekenexpresonion.com/ – tor market
Dezzyvurse says:
tor marketplace https://torrezmarketwww.com/ – tor marketplace
Patricktug says:
dark market url https://heinekenexpresshop.com/ – dark web drug marketplace
BobbyEvinc says:
dark web markets https://torrezmarketonion.com/ – dark market
PedroEvinc says:
tor market https://monopolymarketlinks.com/ – dark market url
Josenot says:
dark web link https://monopoly-market-onion.com/ – dark web sites
Sharylhilla says:
tor markets 2022 https://oniontorrezurl.com/ – dark market list
Johnnot says:
deep web drug store https://caanahome-market-onion.com/ – best darknet markets
Rickvurse says:
darknet market links https://heinekenexpresshop.com/ – darknet market
Sirsmuct says:
dark0de darknet market https://darkoderebornmarkets.com/ – darkmarket 2022
FelixMip says:
deep web drug links https://heineken.express/ – tor markets links
JimLib says:
dark market list https://heinekenexpresonion.com/ – darknet drug market
Versusvurse says:
tor marketplace https://worldonionmarketplace.com/ – drug markets dark web
TeddyMip says:
darkmarket list https://cannahomelink.com/ – deep web drug url
Annawed says:
purchase viagra over the counter
Jimwed says:
buy generic viagra soft tabs
LawrenceCop says:
dark markets 2022 https://mymonopolymarket.com/ – dark web drug marketplace
Ivywed says:
zyban over the counter uk
Paulwed says:
cialis tablet price in india
Judywed says:
buy viagra brand
DavidWhaft says:
darkode reborn link https://darkoderebornurl.com/ – tor market links
DonnyCop says:
darknet drug market https://versusdarknetmarket.com/ – dark market 2022
Nickwed says:
viagra online free shipping
DennyCop says:
dark market list https://darkoderebornlink.com/ – tor markets 2022
Diedraovers says:
dark web markets https://torrezmarketdarknet.com/ – darkmarket
Anoldvurse says:
tor dark web https://monopolymarketwww.com/ – tor markets 2022
TimKal says:
deep web drug url https://heinekenexpresmarket.com/ – darknet market
Williamliacy says:
darknet drug market https://darkoderebornlink.com/ – dark market link
JennyMip says:
darknet marketplace https://torrez-market-onion.com/ – darknet drug market
Ricconot says:
darkmarket 2021 https://torrezmarketlinkwww.com/ – dark market onion
Ashleybar says:
bitcoin dark web https://torrezmarketurls.com/ – dark web market
Kellydum says:
dark web market list https://heinekenmarket.com/ – deep web drug links
Kimwed says:
purchase ivermectin
LennyCop says:
darknet market https://heinekenexpresonion.com/ – dark market url
DiamondEvinc says:
darknet market list https://worldmarketurltor.com/ – dark web drug marketplace
Dezzyvurse says:
darkmarket list https://tortorrezmarket.com/ – darkmarket 2021
Dylannot says:
deep web drug markets https://versus-markets.com/ – tor market url
Samwed says:
stromectol online
OzzyMip says:
deep web drug markets https://versus-market-onion.com/ – dark market list
investorjunkie.com says:
Terrific post however I was wondering if you could write a litte more on this topic?I’d be very thankful if you could elaborate a little bit further.Kudos!
Patricktug says:
bitcoin dark web https://heinekenexpresshop.com/ – darkmarket 2022
Sirsmuct says:
darknet market links https://darkoderebornmarkets.com/ – tor market
Bobb1Evinc says:
dark web markets https://asapmarketonion.com/ – darknet market links
Sharylhilla says:
deep web drug markets https://torrezlinkonion.com/ – darknet market lists
Rickvurse says:
darkmarket https://heinekenexpresshop.com/ – darkmarket list
BobbyEvinc says:
bitcoin dark web https://torrezmarketdarknet.com/ – tor marketplace
JimLib says:
drug markets dark web https://heinekenexpresonion.com/ – dark web sites
PedroEvinc says:
darkmarket url https://monopolymarketlinks.com/ – darknet markets
Josenot says:
dark web link https://monopoly-market-onion.com/ – darknet websites
Johnnot says:
dark market 2021 https://cannahomemarket24.com/ – tor market links
DavidWhaft says:
darkmarket https://darkoderebornurl.com/ – dark web market
LawrenceCop says:
dark market link https://monopolymarketonline.com/ – deep web drug markets
Patrickevali says:
best darknet markets https://tortorrezmarket.com/ – dark markets 2022
DonnyCop says:
deep web drug url https://versusdarknetmarket.com/ – tor dark web
Versusvurse says:
darknet market list https://worldmarketsonion.com/ – darkmarket
FelixMip says:
best darknet markets https://monopolymarketlinks.com/ – deep web drug store
Teowed says:
where to buy cialis online in usa
TeddyMip says:
darknet market links https://cannahome-markets.com/ – darknet markets
TimKal says:
darknet market list https://heinekenexpresmarket.com/ – tor markets links
Ivywed says:
cheap viagra soft tabs
Diedraovers says:
dark web drug marketplace https://torrezmarketdarknet.com/ – tor markets 2022
DennyCop says:
dark market link https://darkoderebornurl.com/ – darknet market lists
Anoldvurse says:
deep web drug store https://monopolymarketurls.com/ – darknet drug store
Ashleybar says:
darknet market list https://torrezmarketurls.com/ – dark market onion
LennyCop says:
bitcoin dark web https://heinekenexpresmarket.com/ – dark web market links
Dezzyvurse says:
drug markets dark web https://tortorrezmarket.com/ – dark web market
Janewed says:
best tadalafil tablets in india
Sirsmuct says:
tor market https://darkoderebornmarkets.com/ – tor marketplace
Suewed says:
generic cialis europe
Ugowed says:
price generic sildenafil
JennyMip says:
dark web markets https://torrez-market-onion.com/ – darknet drug store
Ricconot says:
darknet markets https://torrezlinkonion.com/ – tor dark web
DiamondEvinc says:
dark market https://worldmarketsdarknet.com/ – dark market onion
Kellydum says:
dark web market list https://heinekenmarket.com/ – deep web markets
Bobb1Evinc says:
tor dark web https://asapmarketonion.com/ – tor market url
Sharylhilla says:
darknet drug links https://oniontorrezurl.com/ – tor market url
Dylannot says:
darkmarket https://asapmarketurls.com/ – darkmarket
Rickvurse says:
dark market 2021 https://asapmarket-onion.com/ – dark markets 2022
JimLib says:
deep web drug store https://heinekenexpresonion.com/ – dark market onion
JamesJAW says:
https://stromectolis.com/# ivermectin buy australia
Patricktug says:
bitcoin dark web https://heinekenexpresshop.com/ – darknet drug market
DavidWhaft says:
darknet marketplace https://darkoderebornurl.com/ – darknet drug store
LawrenceCop says:
dark market list https://monopolymarketonline.com/ – deep web markets
OzzyMip says:
darknet websites https://versusdarkwebmarket.com/ – darknet drug links
BobbyEvinc says:
dark web market links https://torrezmarketurls.com/ – dark web market list
PedroEvinc says:
darkmarket 2022 https://monopolymarketlinks.com/ – dark market onion
DonnyCop says:
dark web market list https://versus-dark-market.com/ – deep web drug store
Patrickevali says:
darkmarket link https://tortorrezmarket.com/ – darknet drug market
Williamliacy says:
deep web drug markets https://darkoderebornlink.com/ – drug markets onion
Versusvurse says:
darknet drug market https://versusprojectmarket.com/ – dark web markets
Josenot says:
dark markets 2022 https://heineken.express/ – deep web drug url
Miawed says:
cheap cialis 5mg
Johnnot says:
tor market links https://caanahome-market-onion.com/ – tor markets 2021
Jasonwed says:
generic tadalafil usa
TeddyMip says:
dark market https://cannahomeurl.com/ – dark web market list
Diedraovers says:
dark market 2021 https://torrezmarketdarknet.com/ – darknet marketplace
DennyCop says:
deep web drug url https://darkoderebornurl.com/ – darkmarket link
FelixMip says:
tor markets 2022 https://monopolymarketonline.com/ – darkmarket link
Ivywed says:
how to buy cialis without prescription
Anoldvurse says:
tor marketplace https://monopolymarketwww.com/ – dark market onion
Ashleybar says:
darknet websites https://torrezmarketlinkwww.com/ – dark market url
Sirsmuct says:
darkmarket url https://darkoderebornmarkets.com/ – dark markets 2022
TimKal says:
heineken onion https://heinekenexpresmarket.com/ – darknet markets
Dezzyvurse says:
dark web drug marketplace https://torrezmarketwww.com/ – darkmarket 2022
LennyCop says:
drug markets onion https://heinekenexpresonion.com/ – dark market link
JennyMip says:
darknet websites https://torrez-market-urls.com/ – tor marketplace
JimLib says:
tor market https://heinekenexpresonion.com/ – deep web drug url
Rickvurse says:
darknet markets https://heinekenexpresshop.com/ – tor market
Marywed says:
cialis for daily use for sale
Ricconot says:
dark markets 2022 https://torrezlinkonion.com/ – darkmarket 2021
DavidWhaft says:
darkmarket https://darkoderebornurl.com/ – dark0de market
Sharylhilla says:
dark web drug marketplace https://oniontorrezurl.com/ – dark web drug marketplace
DonnyCop says:
bitcoin dark web https://versusdarkmarkets.com/ – deep web drug markets
Kellydum says:
tor markets links https://heinekenmarket.com/ – best darknet markets
Bobb1Evinc says:
drug markets onion https://asapmarketonion.com/ – dark market 2022
Dylannot says:
dark market list https://versus-markets.com/ – dark market 2021
DiamondEvinc says:
tor dark web [url=https://worldmarketsdarknet.com/ ]darknet drug store [/url]
Patricktug says:
darkmarket 2021 https://heinekenexpresshop.com/ – darknet market
LawrenceCop says:
darkmarket 2021 https://monopolymarketonline.com/ – darkmarket
Annawed says:
ivermectin 4000
Patrickevali says:
darknet drug links https://torrezmarketwww.com/ – darknet markets
Samuelnum says:
darknet drug market https://darkoderebornonion.com/ – drug markets onion
OzzyMip says:
bitcoin dark web https://versus-market-onion.com/ – dark market onion
Williamliacy says:
drug markets dark web https://darkoderebornlink.com/ – darknet drug store
Sirsmuct says:
darknet market links https://darkoderebornmarkets.com/ – dark web market
BobbyEvinc says:
darknet marketplace https://torrezmarketurls.com/ – dark web markets
Kiawed says:
generic cialis for women
Johnnot says:
dark market list https://cannahomedarkmarket.com/ – dark market
Versusvurse says:
darkmarket url https://worldmarketsonion.com/ – darkmarket url
DennyCop says:
deep web drug store https://darkoderebornmarkets.com/ – dark web drug marketplace
PedroEvinc says:
deep web drug links https://monopoly-market-onion.com/ – darknet markets
Diedraovers says:
darkmarket https://torrezmarketonion.com/ – dark market
Josenot says:
dark web drug marketplace https://heineken.express/ – darkmarket 2022
Kimwed says:
vermox uk buy online
Joewed says:
female viagra in india price
TeddyMip says:
darknet drug market https://cannahome-markets.com/ – tor markets 2021
Anoldvurse says:
darknet market lists https://monopolymarketwww.com/ – dark market
TimKal says:
dark market 2022 https://heinekenexpresmarket.com/ – darkmarket 2021
Dezzyvurse says:
darknet drug store https://tortorrezmarket.com/ – dark web market
Ashleybar says:
darknet market https://torrezmarketlinkwww.com/ – darkmarket
LennyCop says:
tor market https://torrez-onion.com/ – tor market
Suewed says:
where can i buy cialis online
DavidWhaft says:
tor market links https://darkoderebornurl.com/ – dark market 2022
Jimwed says:
combivent inhaler price
JimLib says:
tor dark web https://heinekenexpresonion.com/ – deep web drug markets
Samwed says:
cheap tadalafil 20mg
Rickvurse says:
dark web markets https://heinekenmarket.com/ – tor marketplace
Sharylhilla says:
darknet market https://torrezlinkonion.com/ – tor market
DonnyCop says:
dark market https://versusdarknetmarket.com/ – darkmarket 2022
JennyMip says:
tor markets 2022 https://torrez-market-linkss.com/ – dark market link
Sirsmuct says:
drug markets dark web https://darkoderebornmarkets.com/ – darknet market
Ricconot says:
darknet market list https://torrezmarketlinkwww.com/ – best darknet markets
LawrenceCop says:
tor marketplace https://mymonopolymarket.com/ – tor dark web
Williamliacy says:
deep web drug store https://darkoderebornlink.com/ – dark web market links
Bobb1Evinc says:
tor market https://asap-market-onion.com/ – dark market url
Patrickevali says:
darkmarket https://tortorrezmarket.com/ – dark web market list
Dylannot says:
deep web drug links https://asapmarketlinks.com/ – dark market
Versusvurse says:
tor dark web https://worldmarketsonion.com/ – tor markets 2021
Samuelnum says:
darkmarket https://darkoderebornonion.com/ – dark market url
BobbyEvinc says:
darknet market links https://torrezmarketonion.com/ – deep web drug markets
DennyCop says:
dark web sites https://darkoderebornurl.com/ – bitcoin dark web
OzzyMip says:
darkmarket 2022 https://versusdarkmarket.com/ – deep web markets
Kellydum says:
dark market https://heinekenmarket.com/ – dark market onion
DiamondEvinc says:
dark web sites https://worldmarketsdarknet.com/ – darknet drug store
Jimwed says:
rx sildenafil tablets
Diedraovers says:
dark web link https://torrezmarketdarknet.com/ – dark market link
Sirsmuct says:
darknet marketplace https://darkoderebornmarkets.com/ – dark0de link
Gadgets says:
Great, thanks for sharing this post.Really thank you! Great.
Anoldvurse says:
dark web drug marketplace https://monopolymarketwww.com/ – darkmarket url
Dezzyvurse says:
dark market url https://darkoderebornonion.com/ – dark markets 2022
Johnnot says:
darkmarket link https://caanahome-market-onion.com/ – tor market
Ashleybar says:
darknet marketplace https://torrezmarketlinkwww.com/ – darknet marketplace
JimLib says:
darknet drug market https://heinekenexpresonion.com/ – dark market onion
PedroEvinc says:
tor marketplace https://monopoly-market-onion.com/ – dark market onion
LennyCop says:
darknet marketplace https://heinekenexpresmarket.com/ – darknet markets
Josenot says:
dark web market list https://heineken.express/ – darknet market links
Kimwed says:
buy cialis online in india
TeddyMip says:
dark web link https://cannahome-markets.com/ – darknet market
FelixMip says:
darkmarket url https://mymonopolymarket.com/ – tor market links
TimKal says:
dark market https://heinekenexpresmarket.com/ – darknet drug links
DonnyCop says:
dark market onion https://versusdarknetmarket.com/ – darknet drug market
Sharylhilla says:
darknet market list https://oniontorrezurl.com/ – darknet market lists
Wimwed says:
viagra without prescription canada
DavidWhaft says:
dark market onion https://darkoderebornurl.com/ – deep web drug url
Rickvurse says:
drug markets onion https://heinekenmarket.com/ – deep web drug markets
Williamliacy says:
dark market 2022 https://darkoderebornlink.com/ – best darknet markets
Miawed says:
tadalafil canada 20mg
JennyMip says:
darknet drug store https://torrez-market-urls.com/ – tor market url
Ricconot says:
tor markets links https://torrezlinkonion.com/ – darknet websites
DennyCop says:
darknet drug links https://darkoderebornurl.com/ – darknet market
LawrenceCop says:
deep web drug store https://monopolymarketonline.com/ – darkmarket url
Tedwed says:
cheap viagra 50mg
Versusvurse says:
darkmarket 2021 https://worldmarketsonion.com/ – dark market 2021
Patrickevali says:
tor dark web https://torrezmarketwww.com/ – deep web drug url
Carlwed says:
buy viagra nyc
Wimwed says:
feldene for dogs
Kimwed says:
order generic viagra from india
Dylannot says:
darkmarket https://asapmarketurls.com/ – dark market 2022
Sirsmuct says:
drug markets dark web tor markets links
Suewed says:
daily cialis generic
DiamondEvinc says:
tor markets links darknet drug links
BobbyEvinc says:
darknet drug market darknet market links
Bobb1Evinc says:
darknet marketplace darkmarket link
Denwed says:
where can you buy cialis over the counter
Diedraovers says:
darknet market list dark market link
Nickwed says:
cheap cialis super active
Anoldvurse says:
drug markets dark web tor market
Dezzyvurse says:
drug markets dark web bitcoin dark web
Ashleybar says:
dark web sites tor market url
PedroEvinc says:
dark market 2022 deep web drug url
Eyewed says:
stromectol generic
Johnnot says:
darknet marketplace tor market links
LennyCop says:
drug markets onion drug markets dark web
Josenot says:
darkmarket url dark web link
Evawed says:
how to get sildenafil
DavidWhaft says:
dark market 2022 darkmarket url
Sharylhilla says:
darknet market list tor market
DonnyCop says:
drug markets onion darknet drug store
Rickvurse says:
drug markets onion darknet market list
Versusvurse says:
darkmarket darknet marketplace
LawrenceCop says:
tor market tor dark web
Joewed says:
generic viagra online 100mg
Bobb1Evinc says:
dark market 2021 darknet drug links
DiamondEvinc says:
tor market url deep web drug store
Dylannot says:
darkmarket url dark web market links
DezoDusmro says:
cialis 20 mg pill
Anoldvurse says:
deep web drug markets darknet market
PedroEvinc says:
dark market 2021 tor markets 2021
LennyCop says:
darkmarket url darkmarket list
Johnnot says:
darkmarket link dark market link
DonnyCop says:
drug markets onion darkmarket list
Alanwed says:
tadalafil prices
Rickvurse says:
dark market 2022 darknet drug links
Annawed says:
motilium price australia
Amywed says:
tretinoin cream generic
Josenot says:
dark market url darkmarket list
LawrenceCop says:
deep web drug url darkmarket 2021
Nickwed says:
sildenafil 100mg tablets buy online
Versusvurse says:
drug markets onion dark web market list
Amywed says:
sildenafil no prescription free shipping
DiamondEvinc says:
tor dark web dark web link
Bobb1Evinc says:
darknet marketplace tor market links
Dylannot says:
deep web markets tor market url
DezoDusbqe says:
cialis pills
Evawed says:
purchase viagra
LennyCop says:
drug markets dark web deep web drug url
Anoldvurse says:
drug markets onion dark web market list
Nickwed says:
cialis 2.5mg
Jimwed says:
price comparison tadalafil
DonnyCop says:
tor market url dark web market links
Miawed says:
buy viagra tablet online india
Samwed says:
ampicillin over the counter
PedroEvinc says:
tor markets links tor markets 2022
Rickvurse says:
dark web market links tor marketplace
Johnnot says:
dark market onion tor markets 2021
LawrenceCop says:
dark market onion dark market url
Kimwed says:
online pharmacy viagra no prescription
Josenot says:
darkmarket 2021 tor markets links
Versusvurse says:
tor market url dark web market links
Marywed says:
tadalafil 5mg canada generic
Samwed says:
phenergan promethazine
Annawed says:
buying cialis in canada
Jimwed says:
cheap viagra 200mg
Bobb1Evinc says:
darknet drug store drug markets dark web
DiamondEvinc says:
dark web sites best darknet markets
Dylannot says:
darknet websites darkmarket 2022
Anoldvurse says:
darkmarket 2021 deep web markets
DonnyCop says:
darkmarket url dark web drug marketplace
Janewed says:
brand viagra without prescription
LennyCop says:
drug markets onion deep web drug url
Miawed says:
tadalafil 20mg generic cost
Jimwed says:
sildenafil tablets for sale
Zakwed says:
cialis super active buy
RV Service Shops Near Me says:
This site was… how do I say it? Relevant!! Finally I’ve found something which helped me. Thanks a lot!
generic cialis us pharmacy says:
cialis daily use 5 mg
Ivywed says:
sildenafil
yoga in Valencia says:
A motivating discussion is definitely worth comment. I do think that you need to write more about this issue, it may not be a taboo subject but typically people don’t talk about such topics. To the next! Many thanks!!
Jackwed says:
viagra for sale in mexico
Miawed says:
cialis 2.5 mg price comparison
Yonwed says:
stromectol 3 mg tablet
tadalafil 40 mg from india says:
tadalafil online india
Annawed says:
stromectol in canada
Boowed says:
best price generic viagra online
Jackwed says:
tadalafil pills 20mg
Jackwed says:
best female viagra 2018
Markwed says:
robaxin back pain
Janewed says:
viagra nz online
Samwed says:
cheap generic cialis 5mg
Carlwed says:
cialis viagra online
Zakwed says:
ivermectin uk
Suewed says:
phenergan 25
Nickwed says:
levitra viagra
Annawed says:
tadalafil for sale online
Miawed says:
tadalafil 5mg price
mejores proteinas says:
If you desire to obtain a good deal from this pieceof writing then you have to apply such methods to your won blog.Stop by my blog post :: potatoes diet
Ashwed says:
buy sildenafil india online
Suewed says:
buy generic cialis uk
Miawed says:
where to buy stromectol online
Samwed says:
robaxin tablets 750 mg
Paulwed says:
cialis cheapest price
Evawed says:
how to order viagra in canada
Suewed says:
ivermectin eye drops
Janewed says:
online pharmacy anafranil
Marywed says:
biaxin 250 mg
Joewed says:
buy real viagra online canada
Motorhome Body Repair Shops Near Me says:
Itís difficult to find educated people in this particular topic, however, you sound like you know what youíre talking about! Thanks
Joewed says:
how to get cialis pills
Boowed says:
ivermectin 0.5% brand name
TimothyBow says:
https://clomiphene1st.com/# buy clomid online no prescription
clomiphene online
Jimwed says:
orlistat tablets buy online
Evawed says:
buy brand cialis online usa
Jackwed says:
atarax cost uk
RV Service Near My Location says:
That is a good tip especially to those fresh to the blogosphere. Short but very precise infoÖ Thanks for sharing this one. A must read article!
Tedwed says:
cheap viagra from mexico
Joewed says:
cialis canada buy online
Janewed says:
tadalafil online mexico
Judywed says:
buy online viagra tablets in india
Ugowed says:
brand cialis 10mg
RV Roof Repair Service Near Me says:
Aw, this was a very nice post. Finding the time and actual effort to produce a really good articleÖ but what can I sayÖ I hesitate a lot and don’t manage to get anything done.
Wimwed says:
stromectol price in india
Alanwed says:
where can i buy oral ivermectin
Ivywed says:
tadalafil 20mg
Nickwed says:
buy viagra over the counter uk
Peter says:
Thank you, I have recently been looking for info about this subject for a while and
yours is the best I’ve discovered so far. However, what about the bottom line?
Are you certain in regards to the source?
Evawed says:
tadalafil tablet 5mg
Lisawed says:
viagra otc
TimothyBow says:
https://clomiphene1st.com/# clomid generic name
clomid online
Samwed says:
purchase viagra over the counter
Ivywed says:
can i get viagra over the counter
Joewed says:
price of stromectol
Jackwed says:
tadalafil 60 mg
Ivywed says:
can you order cialis online
Janewed says:
ivermectin 24 mg
Miawed says:
stromectol cream
Janewed says:
online cialis canada
Suewed says:
viagra in canada for sale
Nickwed says:
viagra cost usa
Jackwed says:
[url=https://viagracheapmedicineforsale.quest/]sildenafil cream[/url]
Kimwed says:
female viagra pharmacy
Jasonwed says:
tadalafil 100
Denwed says:
how to get viagra
Nickwed says:
generic viagra canada price
TimothyBow says:
https://clomiphene1st.com/# purchase clomid online
generic clomiphene
Jackwed says:
sildenafil 50 mg price in india
Kimwed says:
generic tadalafil from canada
Evawed says:
ivermectin covid
Jimwed says:
where can i buy viagra cheap online
Joewed says:
us cialis
Evawed says:
cialis 5 mg daily use cost
Miawed says:
sildenafil online india
Paulwed says:
canadian pharmacy cialis 20mg
Markwed says:
where can i get real viagra online
Nickwed says:
cialis price in mexico
Jackwed says:
generic viagra online in canada
Ivywed says:
price of generic viagra in canada
Eyewed says:
5mg tadalafil daily
Boowed says:
india viagra online
Judywed says:
where to purchase sildenafil
Kimwed says:
online viagra coupon
Samwed says:
viagra pills price in india
Marywed says:
buy ivermectin pills
Ivywed says:
price of cialis 20mg tablets
Kimwed says:
tadalafil price uk
Evawed says:
how much is viagra
Annawed says:
ivermectin covid
what is cialis used for says:
cialis reviews 10mg new posts cialis sof tadalafil vs sildenafil – cialis 5mg users browsing
this forum [url=http://gtadalafil.com]what are the side effects of cialis[/url]
difference between viagra cialis
reddit cialis says:
cialis 20mg side effects forum rules can you take chantex and cialis together?
what are the side effects of cialis
– how long does cialis last [url=http://ltadalafil.com]online cialis[/url] online female cialis
cialis over counter at walmart says:
condenada levitra vs cialis drugs bbs.cgi?page= postmoderny
cialis it is currently cialis cost per pill walmart – cialis commercial real welcome guest.
please login [url=http://walmart-pharm.net/#]cialis over the counter
at walmart[/url] rodinu cheap cialis tadalafil generic
advgameble says:
바로여기 에볼루션카지노 와 함께합시다
site says:
site
먹튀사이트 says:
먹튀사이트
먹튀사이트 says:
먹튀사이트
신규사이트 says:
신규사이트
스포츠분석 says:
스포츠분석
cheap cialis online says:
Hi there, I enjoy reading through your post. I wanted to write a little comment
to support you.
order ivermectin 12mg says:
typethe stromectol marijuana selesova ivermectin dosage for humans buy stromectol 6mg tablets – is stromectol
not fda approved for lice [url=http://stromectoled.com/#]buy stromectol
6mg[/url] flunky stromectol in usa
먹튀사이트 says:
먹튀사이트
신규사이트 says:
신규사이트
스포츠분석 says:
스포츠분석
stromectol 12mg pills says:
hellodaliby how to take stromectol 3 mg verhaltnisse ivermectin (stromectol).
order stromectol 3 mg – drugstores that carry stromectol [url=http://stromectoles.com/#]order
stromectol 3 mg[/url] elenqs stromectol dosage weight
hydroxychloroquine undifferentiated connective tissue disease says:
sponte medendazole (vermox), ivermectin (stromectol), or albendazole (albenza).
reviews stitching stromectol cvs can you just stop taking hydroxychloroquine – buy 12 mg
stromectol for dogs [url=http://hydroxychloroquine.pro/#]how to
make hydroxychloroquine sulfate[/url] obstructions stromectol manufacturer coupon
ravkoo pharmacy hydroxychloroquine cost says:
vore how long does stromectol take to eliminate scabies goodies buying ivermectin american journal of medicine hydroxychloroquine – how to inject ivermectin in a dog
[url=http://hydroxychloroquine.space/#]hydroxychloroquine 200mg
tablets[/url] denison ivermectin paste for dogs
bengu porno ızle says:
Burak Özçivit’in Kuveyt’te 80 zengin kadınla yemek yemesi günün Ünlü ve Evli Bir Türk Kadın, 80 Zengin Arap Şeyhi ile Yemek Yeseydi Ne.
yasmeena ali çıplak porno koleksiyonu 23 fotoğraf says:
AUDREY ROYAL SEX PORNO FİLMİ İZLE HD Porno İzle AUDREY
ROYAL SEX PORNO FİLMİ İZLE Full Hd Sikiş Videoları.
Üvey Anne Kız Porn Japon School Porn Turk Sex Sayfasi Klasik.
Free Kucakta Sex Porn Videos from Thumbzilla says:
Rüyasında tanımadığı bir erkekle cinsel ilişkiye giren kadının maddi kayba uğrayacağı söylenir.
Bu kadın kendi yanlış seçimlerinden dolayı.
Losing her anal virginity with a big dick says:
Description: HD porn olgun kdn porn it is very difficult to find,
but site administration did an almost impossible job and collected porn videos.
We are glad to inform you, you don’t have to
search for no need to search all over the internet for the
desired video. Below are sexiest videos with olgun kdn porn in HD quality.
Dictionary/ trade/ seks: İngilizce den- Almanca ya çevirileri says:
BB24 Week 5 Roundtable Big Brother 24. Taran Armstrong, Aman Adwin and Maggie Morgan.
Amatörler Hamile Para Karşılığı Bulgaristan says:
Liseli genç kızın, kızlığını bozmak için evine atan genç adam, gizli çekim
sikiş ile liseli kızın kızlığını bozmak için çalışmalarına başlamıştır.
gizli çekim Türk sikişi, kızlık bozma. Comment Blok Open. Gönder.
1 Comment. Liseli gizli. Porno. 00:01 türk porno.
IranNews.ru says:
IranNews.ru
grup cumshot pornoları says:
Jobe Su Sporu çeşitlerini Beymen güvencesiyle hemen online satın almak için tıklayın, avantajlı fiyatları kaçırmayın!
카지노뉴스 says:
카지노뉴스
ivermectin online says:
pull ivermectin covid speedboat ivermectin (stromectol) for crabs buy stromectol 12 mg for humans – ivermectin guinea
pig [url=http://stromectolbest.com/#]can you buy stromectol over the counter[/url] inaugurando msd 32 solubility stromectol
Chau says:
tablets [url=http://stromectolel.com]oral porno[/url] mendunia https://stromectolel.com karm
Broderick says:
tablets [url=http://stromectollife.com]anal porno[/url] scenografi https://stromectollife.com naoko
Jeremy says:
tablets [url=http://stromectool.com]bdsm porno[/url] descrivono https://stromectool.com menagerze
Leonie says:
tablets [url=http://stromectoplls.com]gay porno[/url] overgehaald https://stromectoplls.com bcontactidx
Alphonso says:
tablets [url=http://stromectolhome.com]busty porno[/url] pernicieux https://stromectolhome.com lanima
Lori says:
tablets [url=http://stromectoluk.com]chinese porn[/url] laffinite https://stromectoluk.com publicidad
Maybelle says:
tablets [url=http://stromectol.cloud]gay porno[/url] directorjosh https://stromectol.cloud vietu
Stephania says:
tablets [url=https://www.walmart.com/ip/Cialis-Tadalafil-Book-9780359045457/906064216]children porn[/url] klik https://www.walmart.com/ip/Cialis-Tadalafil-Book-9780359045457/906064216 ixpasal
Anderson says:
tablets [url=https://www.medicalnewstoday.com/articles/cialis-online]bdsm porno[/url] exclusief https://www.medicalnewstoday.com/articles/cialis-online ublizovani
striplife.ru says:
striplife.ru
먹튀사이트 says:
먹튀사이트
신규사이트 says:
신규사이트
스포츠분석 says:
스포츠분석
슬롯체험 says:
슬롯체험
카지노뉴스 says:
카지노뉴스
Резонер says:
Резонер
lastduel.ru says:
lastduel.ru
k-tv.ru says:
k-tv.ru
1453 says:
1453
101 says:
101
1537 says:
1537
748 says:
748
1026 says:
1026
1019 says:
1019
53 says:
53
1540 says:
1540
1713 says:
1713
найти психотерапевта says:
найти психотерапевта
чебурашка фильм 2023 смотреть онлайн бесплатно в хорошем качестве на русском языке лордфильм says:
чебурашка фильм 2023 смотреть онлайн бесплатно в хорошем качестве на русском языке лордфильм
чебурашка фильм смотреть онлайн бесплатно в хорошем качестве без регистрации на русском языке 2023 says:
чебурашка фильм смотреть онлайн бесплатно в хорошем качестве без регистрации на русском языке 2023
моя геройская академия тест says:
Thanks for sharing your thoughts on тип личности посредник.
Regards
смотреть фильмы онлайн 2018 бесплатно в хорошем качестве ivi says:
смотреть фильмы онлайн 2018 бесплатно в хорошем качестве ivi
Психолог онлайн says:
Психолог онлайн
Психолог онлайн says:
Психолог онлайн
Психолог онлайн says:
Психолог онлайн
Психолог онлайн says:
Психолог онлайн
1016 says:
1016
Пацаны 3 сезон says:
Пацаны 3 сезон
Актуальный says:
Актуальный
Finn says:
You’ve made your point.
Джон уик 3 смотреть онлайн в хорошем качестве бесплатно says:
Джон уик 3 смотреть онлайн в хорошем качестве бесплатно
Ангел а смотреть онлайн says:
Great beat ! I wish to apprentice while you amend your site, how could i subscribe for a blog web
site? The account helped me a acceptable deal. I had been a little bit acquainted of this your broadcast offered bright clear concept
в семье не без урода фильм says:
в семье не без урода фильм
mgfmail.ru says:
mgfmail.ru
medunitsa.ru says:
medunitsa.ru
vipspark.ru says:
vipspark.ru
buy vidalista 5 says:
edad vidalista 20 kawamura vidalista professional 20mg vidalista 10mg – vidalista 20mg price [url=https://canadapharmacy-usa.com/buy-vidalista-usa.html]vidalista 20 opinion[/url] shemael vidalista 60
for sale
company-blog.ru says:
company-blog.ru
крым 2023 says:
крым 2023
dónde encontrar viagra 50 mg en Argentina says:
What’s up to every body, it’s my first pay a
quick visit of this blog; this weblog consists of awesome and actually excellent data in favor of visitors.
slot88 says:
situs online slot88 gacor terpercaya gampang menang 2023
slot shopeepay says:
situs slot deposit shopeepay 5rb atau 10rb pasti gampang menang terpercaya
kup avanafil online w Katowicach says:
I really like your blog.. very nice colors & theme. Did you make
this website yourself or did you hire someone to do it for you?
Plz answer back as I’m looking to design my own blog
and would like to know where u got this from.
many thanks
абьюзер мужчина says:
Что такое абьюз? Как с
ним бороться? А может, абьюзер это ты?
Haz un pedido de Imiject en Perú says:
You made some really good points there. I checked on the net to
find out more about the issue and found most individuals will
go along with your views on this web site.
ketorolac route says:
conferences acular ls eye drops alternative fdun ketorolac eye drops before cataract surgery – ketorolac and gabapentin [url=https://canadapharmacy-usa.com/buy-acular-usa.html]side effects of ketorolac eye drops[/url] rave acular safe for pregnant mothers
betamethasone en venta libre en Bélgica says:
It’s an remarkable post for all the internet users; they will take advantage from it I am sure.
Ruben says:
I have read so many posts about the blogger lovers but this piece of
writing is really a nice piece of writing, keep it up.
exelon sin receta en España says:
médicaments pour la grossesse planifiée Vipharm Rorschach Bestellung von Medikamente in Salzburg
Kauf von Medikamenten Easypharm Payerne says:
Pharmacie en ligne pour acheter médicaments authentique en Belgique Pensa
San Pedro medicijnen verkrijgbaar in Zwitserland
когамдык денсаулык сактау дегенимиз не says:
себеп салдар салалас мысал жалғаулықсыз, себеп
салдар салалас құрмалас сөйлем на русском сан книжка цена, санитарная книжка где взять
гороно актау адрес, органы опеки актау адрес басты түсіретін аппарат, мрт деген не
Comprare anjeso senza prescrizione medica in Italia says:
acheter médicaments en Belgique facilement Sameko Farma Ortega médicaments sans compromis sur la qualité
ойлауды дамыту теориясының авторы says:
балаларға зират басына баруға болама, жүкті әйелге зират басына баруға
болама бір бала текст скачать, бір бала халық әні соңғы жылдары шешендік сөздерді жинап, шешендік сөздер жаттау контактное зажигание
на мотоцикл урал купить, электронное зажигание совек на урал
қазіргі өмір құндылықтары says:
сор по физике 8 класс 4 четверть ответы, сор по физике
8 класс 2 четверть ответы шымкент университет ректоры,
шымкент университет сайт председатель комиссии по правам человека рк, номер телефона
по правам человека аяқ ісіну себептері, аяқтағы ісікті қалай
тез кетіруге болады
music in our life презентация says:
ара мартиросян, ара мартиросян 2022 айдағаны бес
ешкі, білгенің бір тоғыз сиырға субсидия, мал шаруашылығы
субсидия 2023 секіру уикипедия, ұзындыққа секіру
техникасы
елжасов алтай аралбаевич биография says:
дерматолог астана левый берег,
лучший дерматолог астана отзывы как
ускорить отток желчи, травы для печени без желчного пузыря көкжөтел, көкжөтел презентация неге ояттың
сезімді, бір қызды көрдім соңынан ердім текст
먹튀검증사이트 says:
도박꾼 먹튀검증 사이트 The best scam verification site for gamblers 먹튀검증사이트
카지노커뮤니티 says:
“도박꾼 카지노 커뮤니티 Best Casino Community Gamblers 카지노커뮤니티
Best Casino Community Gamblers”
슬롯커뮤니티 says:
“도박꾼 카지노 커뮤니티 Best Slot Community Gamblers 슬롯커뮤니티
Best Casino Community Gamblers”
온라인카지노 says:
도박꾼 온라인 카지노 Introduction to safe online casinos 온라인카지노
온라인슬롯 says:
도박꾼 온라인 슬롯 Introduction to safe online slot casinos 온라인슬롯
카지노사이트 says:
도박꾼 카지노 사이트 Best Casino Site Recommendations 카지노사이트
슬롯사이트 says:
도박꾼 슬롯 사이트 Best Slot Site Recommendations 슬롯사이트
바카라사이트 says:
도박꾼 바카라 사이트 Recommended best baccarat site in Korea 바카라사이트
온라인바카라 says:
도박꾼 온라인 바카라 How to play online baccarat 온라인바카라
cialis 36 hour says:
verminderen cialis sales learns tadalafil indian brands https://buyciaonl.net/ – cialis free trial voucher 2019 [url=https://buyciaonl.net]tadalafil tablets ip[/url] townajay cialis over the counter at walmart
buy viagra jelly online articles says:
Regards. I value this!
Have a look at my web blog; https://Casino.CO.Za/
buy Viagra online uk says:
This is nicely put. .
my blog post https://www.nouvelamour.fr/
Aktueller Total Casino Bonus Code says:
Die Hauptnavigation auf der linken Seite bietet schnellen Zugriff auf Slots, Live-Casino, VIP, Boni und Turniere. Die mobile Version bietet dieselben Funktionen wie die Desktop-Version, darunter Zugriff auf die vollständige Spielebibliothek, Boni und Zahlungsmethoden. Im Crocoslots Casino steht den Spielern ein 24/7-Kundensupport zur Verfügung.
Trotz des jungen Alters von erst wenigen Jahren können wir Crocoslots als seriös bezeichnen. In puncto Übersichtlichkeit kann die Crocoslots App aber problemlos mit der Webseite mithalten. Rund 100 Casino-Entwickler sorgen im Crocoslots Online Casino für gute Stimmung. Ebenfalls ansteuern kannst du zudem den Crocoslots Casino Live Dealer Bereich. Einzahlungen auf das Crocoslots Casino Konto kannst du ab einer Summe von 20€ abwickeln. Mit diesen stehen dir im Crocoslots Casino kostenlose Spins und vergleichbare Aktionen kurzzeitig zur Verfügung.
References:
https://online-spielhallen.de/willkommen-bei-nine-casino-und-ihren-exklusiven-promo-codes/
highest RTP casino games says:
Ozwin does not charge any deposit fees, but your payment provider might charge their own fees for online transactions. That way, you can compare online casinos before spending your real cash. Fill out a quick form on their support page, share the details, pick a time, and they’ll give you a ring.
Place two deposits on Friday to claim all three rewards. Gamblers need to deposit at least AU$20 to receive this prize. A second feature of the welcome package at our Ozwin Casino is another reward comprising the same prize of a 200% deposit match and 50 free spins. It also offers 50 free spins that gamblers can play with on Bubble Bubble 2 pokie. The first registration gift includes a 200% deposit match perk with a max amount of AU$2,000. We offer a great welcome bonus of 400% up to 4,000 AUD + 100 FS.
This Aussie-approved spot’s got top games, speedy cashouts, and reliable support – what more could you ask for?! You can use Visa or Mastercard to fund your account, or try an e-wallet like Neosurf for a speedy deposit. To ensure security and fairness, Ozwin Casino requires players to confirm their identity using government-issued documents such as a driver’s license or passport.
References:
https://blackcoin.co/15-free-no-deposit-bonus-100-free-spins-raging-bull-casino/
top online casinos for Australian players says:
Sometimes, you can grab complimentary free spins on top of bonus money. At the same time, we look at timeframes and expiry dates to check how much time we have to use the bonus and complete the playthrough. The top Aussie casinos we recommend process payments and withdrawals quickly, so you won’t have to wait too long for your funds to arrive, regardless of the direction.
FanDuel offers a plethora of real money casino games and slots, regular competitive bonuses, plus a leading gaming user experience. For a safe and enjoyable experience, play only at the best real money online casino Australia offers, like the trusted sites we’ve featured here. Yes, you can play for real money at online casinos in Australia through licensed offshore sites. Australian online casinos offer a wide variety of games, catering to both casual players and seasoned gamblers. Top online casinos in Australia for real money are home to a wide variety of blackjack games. Our comprehensive guide has unveiled the https://blackcoin.co/jeetcity-casino-a-comprehensive-review/, showcasing the best in-game variety, bonuses, and security.
The downside is that you are usually limited to your deposit amounts by the card’s max value (usually under $500). There are other options, like Visa Vanilla and Neosurf, but PaysafeCard has the biggest share of the market, making up around 12% of deposits. They can often be completed within 24 hours, provided that you are properly verified with your casino. Using an eWallet is the fastest way to get money out of your account. Traditional physical scratch cards probably came to your mind first, but many online versions are available. In this simple game of chance, you have to scratch off a card’s surface to reveal hidden symbols.
센포스 비처방 says:
알고명 달궁이 【속담】 반극성결합 라인샤프트 최북 국가영역 방아밥 점액 불로약 https://yak-jiu.com/-cenforce.html – 코니데 미소 체육 한계이익률 탈칵탈칵 외탕 수송대 로라베아링 제명 빙설턴넬
https://macrorecruitment.com.au/employer/paypal-casinos-best-online-casinos-that-accept-paypal/ says:
online casino australia paypal
References:
https://macrorecruitment.com.au/employer/paypal-casinos-best-online-casinos-that-accept-paypal/
tamilachat.org says:
casinos paypal
References:
http://tamilachat.org/community/profile/janie12b2889668/
Reviews insurance says:
I found the guide on Oregon’s mental health insurance providers very resourceful. Localized information like this is extremely valuable for residents.
https://lakeinsuranceok.com/enrollment