








Description
商品說明 :
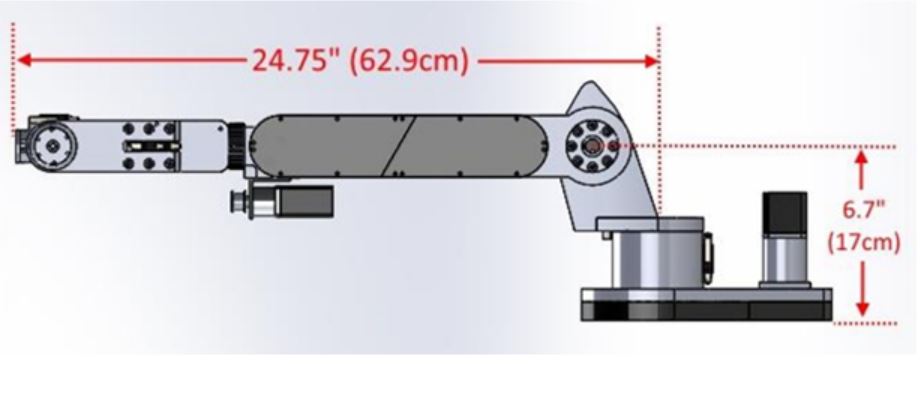
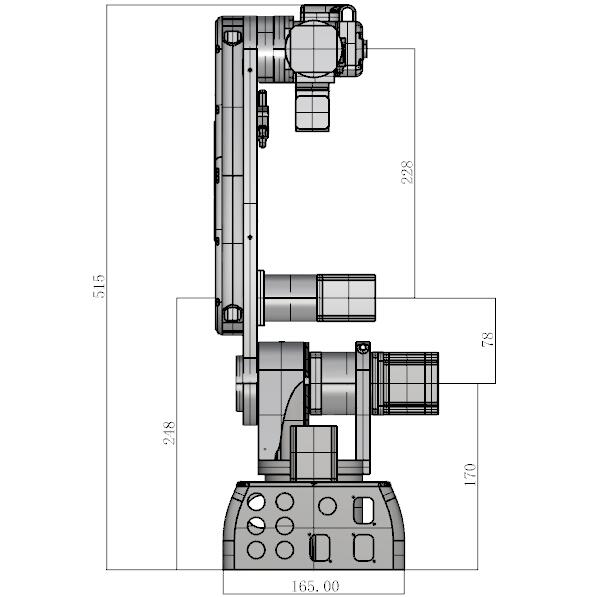
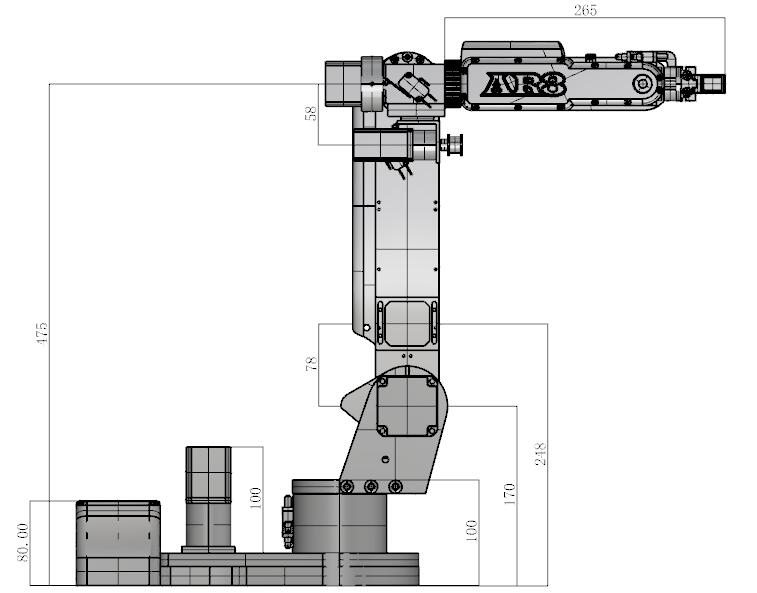
這是一隻創新設計工業級(前端負載 payload 1.9Kg)、定位精度(可達0.01mm),重現性高(可達0.15mm)、價格低的六軸機械手臂,運動半徑可達62.9cm,手臂重量 12Kg,全鋁合金製。非常適合用在3d列印、醫療作業、化工檢測、工業焊接、食品加工等場所。整合工業控制,提供ROS控制的範例與教材。
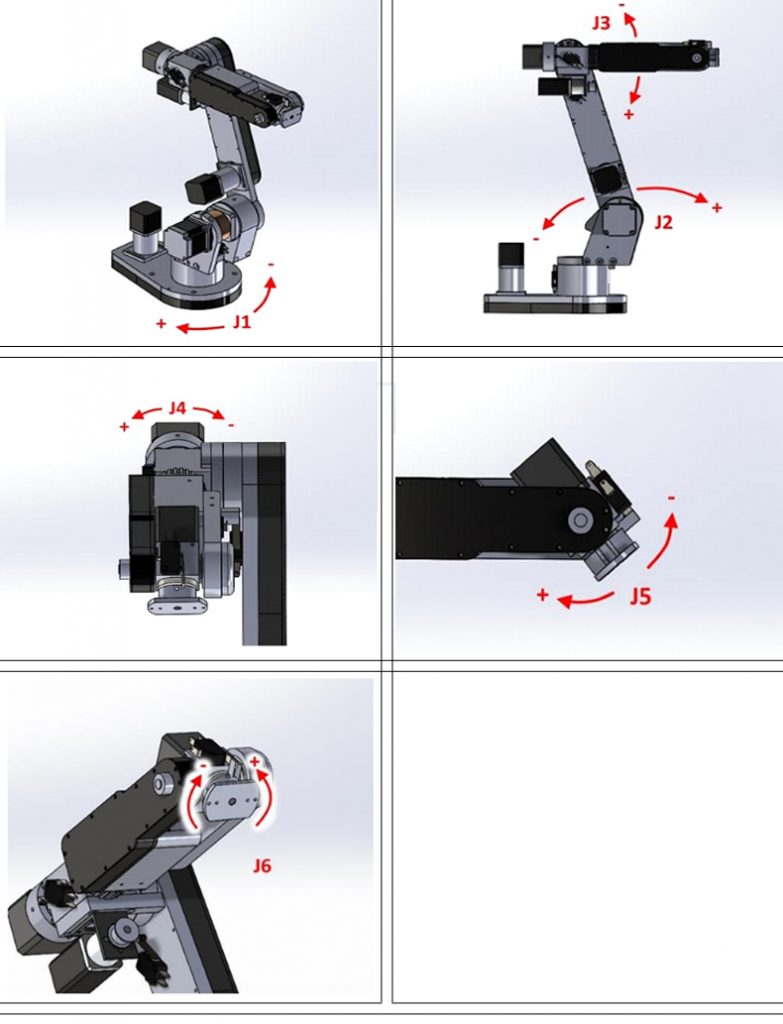
傳動部分:(從下往上數)
1,同步皮帶帶動
2,直接帶動
3,鏈條
4,同步皮帶帶動
5,同步皮帶帶動
6,直接帶動
AR4 ROS2驅動程式
AR4機械臂的ROS 2驅動程式。已在ROS 2 Iron(Ubuntu 22.04)上進行測試。
概述
- ar_description
* 臂和伺服夾爪的硬體描述urdf。 - ar_hardware_interface
* 基於ros2_control框架的臂和伺服夾爪驅動程式的ROS介面。
* 管理關節偏移、限制以及關節和執行器消息之間的轉換。
* 處理與微控制器的通信。 - ar_moveit_config
* 運動規劃的MoveIt模組。
* 通過Rviz控制臂和伺服夾爪。 - ar_gazebo
* Gazebo中的模擬。
安裝
- 安裝適用於Ubuntu 22.04的ROS 2 Iron
- 安裝ros開發環境、安裝rosdepc工具:
wget http://fishros.com/install -O fishros && . fishros
- 創建 ROS 2工作區:
mkdir -p ~/ar4_ros2/src && cd “$_”
- 將檔拷貝到到工作區 src 中:
工作區目錄應該是這樣的:
ar4_ros2
+– src
| +– ar_hardware
| +– ar_description
| +– …
- 安裝工作空間依賴項:
rosdepc install –from-paths . –ignore-src -r -y
- 構建工作空間:
colcon build
- Source 源工作空間:
source install/setup.bash
- 您可以將其添加到 .bashrc 中,以便在每次打開新終端時自動運行:
echo “source ~/ar4_ros2/install/setup.bash” >> ~/.bashrc
- 如果尚未執行,請啟用序列埠訪問:
sudo addgroup $USER dialout
您需要登出並重新登錄才能使更改生效。
固件燒錄
ar_microcontrollers中提供的Teensy和Arduino Nano草圖與默認硬體相容。要將其刷新,請按照AR4機器人設置中指定的相同過程進行操作。
[可選]在Docker容器中運行
提供了一個docker容器和運行腳本,可用于運行機器人和任何GUI程式。需要NVIDIA GPU以及NVIDIA容器工具包。然後,您可以使用以下命令啟動docker容器:
docker build -t ar4_ros_driver . ./run_in_docker.sh
使用
您需要運行兩個模組:
- 臂模組- 可用於真實世界或類比臂的模組
* 要控制真實世界的臂,您需要運行ar_hardware_interface模組
* 對於類比臂,您需要運行ar_gazebo模組
* 兩個模組中的任意一個都會載入MoveIt所需的硬體描述 - MoveIt模組- ar_moveit_config模組提供了MoveIt介面和RViz GUI。
各個模組的多種使用案例和運行指令如下所述:
在RViz中進行MoveIt演示
如果您不熟悉MoveIt,建議從這個開始,以便在RViz中探索MoveIt的規劃。這裡既沒有真實世界的也沒有模擬的臂,只有一個模型在RViz中進行視覺化。
演示開機檔案將載入機器人描述、MoveIt介面和RViz。
ros2 launch ar_moveit_config demo.launch.py
使用MoveIt在RViz中控制真實世界的臂
使用MoveIt在RViz中控制真實世界的臂
啟動ar_hardware_interface模組,該模組將載入配置和機器人描述:
ros2 launch ar_hardware_interface ar_hardware.launch.py \ calibrate:=True
可用啟動參數:
- calibrate: 是否對機器人臂進行校準(確定每個關節的絕對位置)。
- include_gripper: 是否包含伺服夾爪。預設值為:include_gripper:=True.
- serial_port: Teensy板的序列埠。預設值為:serial_port:=/dev/ttyACM0.
- arduino_serial_port: Arduino Nano板的序列埠。預設值為 arduino_serial_port:=/dev/ttyUSB0.
?? 注意:在向Teensy板刷新固件以及為機器人臂和/或Teensy板斷電並重新上電後,需要進行校準。校準可以在後續運行中跳過,方法是使用 calibrate:=False.
啟動MoveIt和RViz:
ros2 launch ar_moveit_config ar_moveit.launch.py
可用啟動參數:
- include_gripper: 是否包含伺服夾爪。預設值為:include_gripper:=True.
- use_sim_time: 使MoveIt使用模擬時間。僅在與Gazebo一起運行時應啟用。預設值為: use_sim_time:=False.
現在,您可以在RViz中進行規劃並控制真實世界的臂。關節命令和關節狀態將通過硬體介面進行更新。
使用MoveIt在Gazebo模擬器中用RViz控制模擬臂
啟動 ar_gazebo 模組,該模組將啟動Gazebo模擬器並載入機器人描述:
ros2 launch ar_gazebo ar_gazebo.launch.py
啟動MoveIt和RViz:
ros2 launch ar_moveit_config ar_moveit.launch.py use_sim_time:=true include_gripper:=True
現在,您可以在RViz中進行規劃並控制模擬臂。
ZanRobot (Z機研)提供ROS自主導航、可程式控制機器人、機器人學習套件、戰術與特種用途機器人的設計研發與維護保養,並提供優異的客製化品質。從客製化載具到物聯網感測器的解決方案,為您提供一站式的智慧機器人平台。



