Description
商品說明:
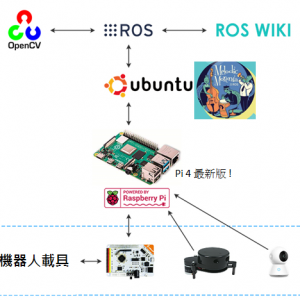
ROS系統是以Linux Ubuntu為主要作業系統所創建的機器人系統,學習ROS可以加速建立具有自主導航以及多種自主演算功能的機器人,近來被大量用在自主導航機器人、多軸機械手臂以及機台自動化的通訊系統上。本教學設備的功能兼具光達感測器應用學習,ROS自主導航語同步建圖以及視覺辨識的學習,利用樹梅派等控制器搭配Python的語法,提供多種應用範例。
本課程設備費可視預算編列,可搭配 深度攝影機進行3D深度建地圖與導航或一般 RGB單眼攝影機,教學以OpenCV影像處理、AI深度學習、深度影像點雲為課程主軸展開,可以讓學生徹底學會最新的AI導航定位的技術。
關於ROS主控的比較與選型建議 :
1. 樹莓派和魯班貓1S可用於簡單的入門學習,深度學習相關功能暫時只適用配TensorFlow(魯班貓1S正在改裝中),同時無認知識別功能。樹莓派在ROS環境下使用深度相機及其相關功能較困難。入門強烈建議性能
可比肩樹莓派的魯班貓1S版。
2. Jetson Nano可以共享英偉達深度學習的資源,整體成績也比樹莓派活躍。
3. Orin Nano 4GB是NVIDIA新推出的高效能嵌入式運算模組,搭載了更強大的GPU和AI運算單元,運行ROS系統響應更加快速,運算力高達20TOPS,可以流暢運行AI深度學習功能,專用適用於處理自主導航、高階電腦視覺等複雜的運算任務。
4. 需要更高階的Xavier Nx、Orin Nano 8GB、Orin Nx 8GB、Orin Nx 16GB等主控請聯絡客服。



以下的板子, 可以由您選擇當作ROS主控板。

以上均提供ROS1/ROS2系統
操作學習手冊
| Chapter 1. ROS2 + AIoT車介紹與操作連線說明 |
| Chapter 2. Python 語法和開發環境介紹 |
| Chapter 3. 初次連入ROS2操控小車 |
| Chapter 4. ROS2 自主導航介紹 |
| Chapter 5. OpenCV影像處理 |
| Chapter 6. 活用ROS並結合感測器 |
| Chapter 7. AI語音辨識 |
| Chapter 8. AI人工智慧快速體驗 |
| Chapter 9. GAI (Generative AI)生成式AI應用 |
| Chapter 10. IoT 物聯網應用 |
| Chapter 11. 學會用AI編寫自己的程式 (最新獨家!) |
客製說明:
本公司替不同產業客製化機器人,同時也提供從高中職到大專院校相關科系的教學設備,Arduino、Raspberry Pi (樹梅派)、Nvidia Jetson、嵌入式系統、準系統電腦等控制器,客戶可以自由選擇交由我們整合在設備中。 不同學校、不同課程規劃乃至不同的預算,客戶可依我們現有的內容,要求彈性調整以便適合您學校的教學規劃,我們歡迎在校老師與我們提出課程規劃與需求,再由本公司的菁英團隊快速為您打造專屬的教學課程。
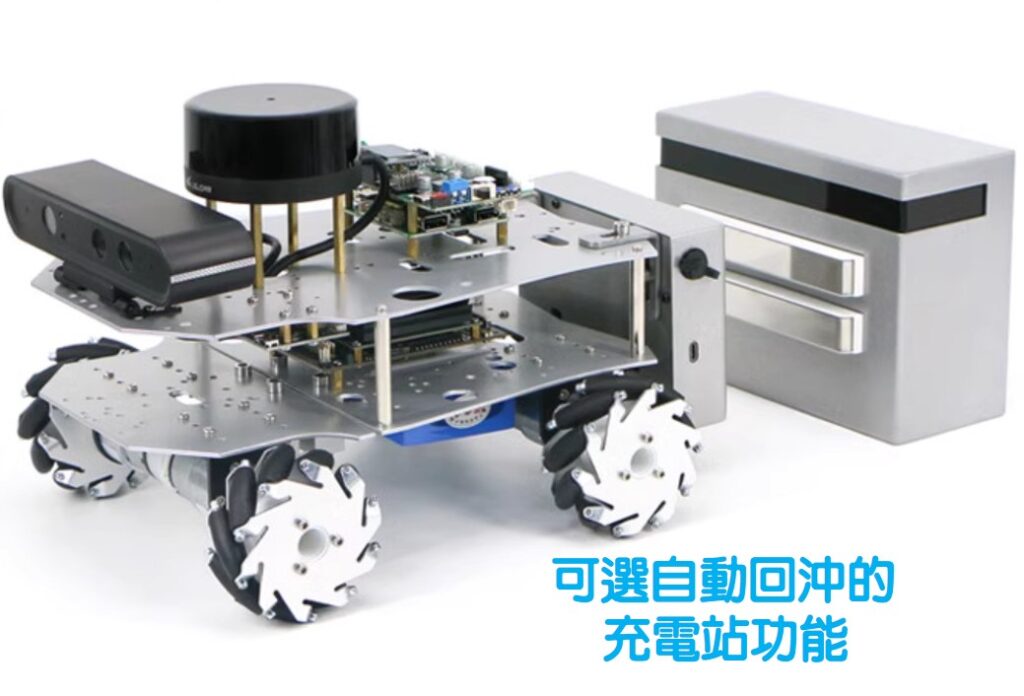
Z機研可根據您的需求提供各種載具的電控整合包括ROS/ROS2 系統、工業4.0、短距離無線遙控、長距離遙控、wifi /4G 視距外遙控、室內精準定位等多種機器人整合技術。我們可提供優質的教學手冊與範例,請參考” 教育套件與創客包“。
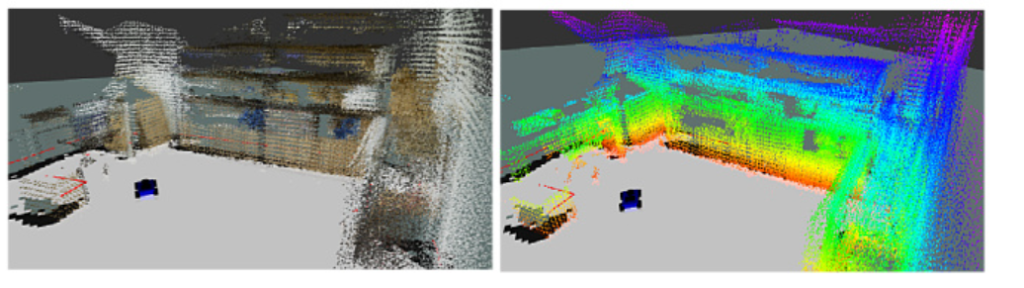
深度視覺建地圖 + 導航
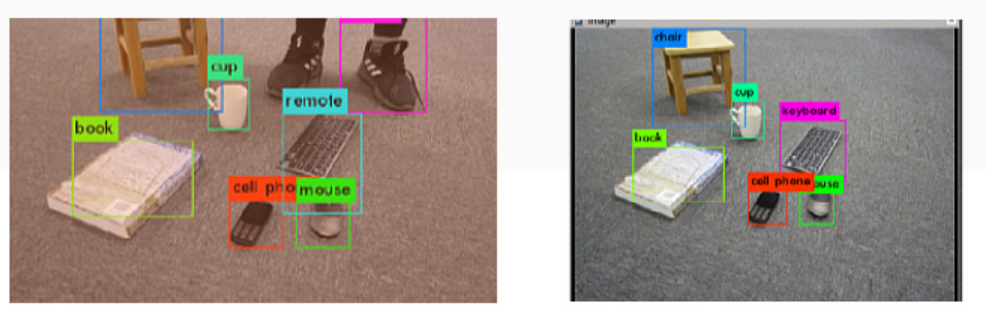
Yolo V5圖片目標辨識