Description
商品說明 :
提供客戶一個完整的控制系統可與您購買的車體互相整合(此處用ROS 架構),有人問說為何一定要用ROS系統,因為使用這套系統可以快速並簡化來達成以下功能 :
- 雷射(激光)雷達建出場域地圖 (LiDAR mapping)
- 室內定位移動與自主避障 (localization / avoidance)
- 使用雷達建圖並實現路徑規劃 (path planning)
- 視覺影像運算與循線 (computer vision)
- ROS 移動里程回饋
- 快速實現無人自駕車的目的 (autonomous car)
要學ROS,需要具備哪些能力 ?
- 可以有基本網路運用知識 (networking)
- 會以下任一種控制器,樹梅派(Pi) 、Jetson Nano、x86/Win10系統。我們都可以客製安裝在您的控制器中
- 電腦語言建議會python,Arduino。我們有學習套件可以帶您輕鬆學習
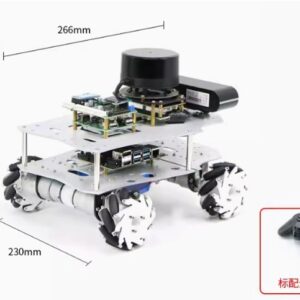
標準規格 :
- 主控制器 : 載具主體控制採用Raspberry Pi 4、搭配 win10遠端操作。 (我們可依據客戶指定搭配Jestson TX1 / TX2、Nano、UDOO等主板,費用依此有所不同)
- Encoder模組 : PID差速差速驅動
- 電壓調節和動力分配模組
- 9軸陀螺儀 (IMU)提供精準與彈性的定位能力
- wifi 無線基地台(AP) : 可以提供你的機器載具能有更遠的操作距離(可超過600米 /視距外),但是這種控制系統可以讓載具自主控制和避障,不需要一直保持連線
- 安裝LiDAR (雷射掃描儀),可以偵測環境中移動或固定的物體,並可結合SLAM定位演算法,使機器人載具可以同時建出環境地圖以及在該環境中隨時定位自己的位置
- 深度視覺 : 提供深度(Z depth)與2維影像資料,供影像辨識與避障判斷 (此項為選配)
- 提供系統的程式碼 (我們需要客戶說明使用場所),包括各nodes,傳輸message格式
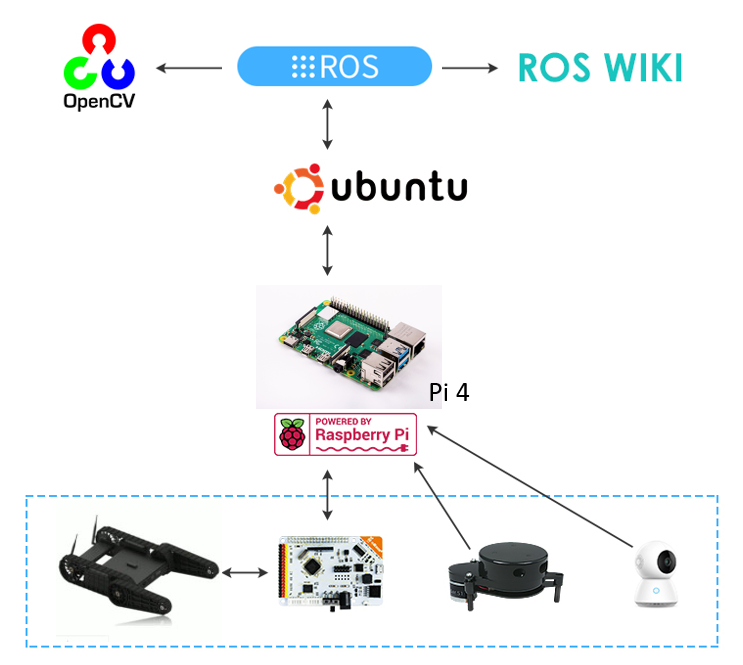
控制系統 : (架構說明)
文件和學習資源:
(整理中)
影帶和照片 :