Description
商品說明 :
OpenArm 是一個科學研究工作與教育的開源雙臂機器人平台。它不僅提供完整的機械圖和電路設計,更包含從底層馬達驅動、ROS 2 介面控製到 Isaac Lab 強化學習環境的完整軟體生態。旨在減少機器人研究,加速演算法驗證與原型開發。核心亮點 :
1. 豐富的 AI 與模擬環境支援
2. 軟硬體完全開源
3. 先進的控制特性
OpenArm開源機器人平台
從硬體設計到Sim2Real模擬的全端解決方案,支援以下
良棋科技提供您的支援包括 : Apache 2.0 協定 / ROS 2 Humble/Iron Isaac Lab 仿真
核心功能亮點
機器人操作
支援單臂/雙臂架構,提供URDF描述與MoveIt配置,開箱即用。
遙操作控制
1:1主從臂映射,支持耦合力回饋與重力補償模式。
強化學習
整合Isaac Lab,提供PPO/SAC演算法訓練環境,無需真機即可訓練。
模擬 to 真實
完整的模擬到真機遷移工作流程,確保演算法在物理世界上可用。
高效能通訊
自研C++ CAN/CAN-FD函式庫,低延遲高吐吞,專為即時控制最佳化。
硬體全開源
STEP/STL/PCB/BOM表全部開放,支援自行製造與修改。
軟體生態詳細解
1. OpenArm CAN 通信庫
專為Linux SocketCAN設計的性能C++庫。支援多電機同步控制。
支援C++17標準開發
提供Python (pybind11) 綁定介面(實驗性)
相容 Ubuntu / Fedora / RHEL 系統
2.ROS 2套裝程式
完整的ROS 2中介軟體集成,包含以下核心包:
openarm_bringup:一鍵啟動腳本(真機/模擬)
openarm_hardware: ros2_control 硬體介面實現
openarm_moveit_config:單/雙臂運動規劃配置
openarm_description:精確的 URDF/XACRO 模型與碰撞體
3. Isaac Lab模擬環境
基於NVIDIA Isaac Sim 5.1.0構建的強化學習環境。預置任務:
任務名稱 說明 支援演算法
達到目標 單/雙臂到達目標點 RSL_RL、RL_Games、SKRL
電梯立方體 物體抓取與提升
保險箱 停靠開關操作
️4.遙控操作
支援Leader-Follow主從控制架構。提供清晰模式:
單向模式:僅主臂控制從臂
主要模式:主從臂力回饋同步
重力補償:主臂零力拖動示教
開源資源清單
2025 openarm/
├── 1.OpenARM硬體/ (STEP裝配體、STL列印檔案、PCB原理圖)
├── 2.OpenArm機器人描述/ (URDF模型、網格檔)
├── 3.OpenArm CAN庫/ (C++驅動源碼、Python綁定)
├── 4.OpenArm ROS2包/ (Bringup開機檔案、硬體介面)
├── 5.OpenArm Teleop/ (遙操作控制源碼)
└── 6.OpenArm Isaac Lab/ (RL環境, 策略腳本)
快速開始指南
⚙️系統要求
- 作業系統: Ubuntu 22.04(推薦)/24.04
- 工具: CMake 3.22+、Python 3.11+
- GPU:運行 Isaac Sim 需 NVIDIA RTX 3060 及以上
安裝流程簡述
1.配置環境:安裝 ROS 2 Humble 及開發工具鏈。
2.安裝驅動:編譯並安裝 OpenArm CAN 庫。
3.配置CAN:運行腳本 `configure_socketcan.sh` 啟動 CAN 介面。
4.編譯工作空間:使用 colcon build 編譯 ROS 2 功能包。
5.啟動:運行 `ros2 launch openarm_bringup openarm.launch.py。

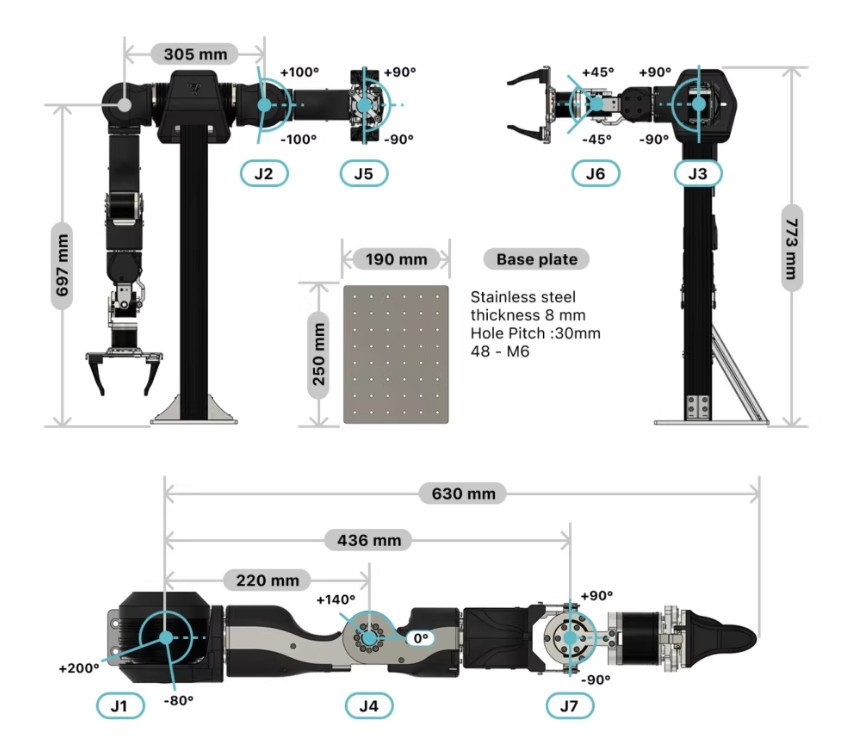
基本尺寸
有效負載定義 :