
就如同各位從零開始的夥伴們,你們一定很想快點看到,一台可以裝上雷射LiDAR導航,自主漫遊 + 路徑規劃 + 自主避障 + 影像AI &^$%^#%%^%^&%^ ~ 等等集合了目前self-driving 前端科技的家用小車八 !! 我們記錄一位工程師,他是如何從零開始的學習、蛻變到一位 self-driving developer的過程。
話說,這一開始的動作應該也是記錄摸索的過程,不過,這卻是最真實的、殘酷與慘痛代價的經驗。希望這些記錄可以減少後面跟進的學習者們寶貴的時間。
在此定義初階段的學習標的 :
- 遠端遙控機器人
- LiDAR雷達建地圖
- 自主導航與避障
- 路徑規劃 (到這 ~ 基本該會的操作都已經具備了)
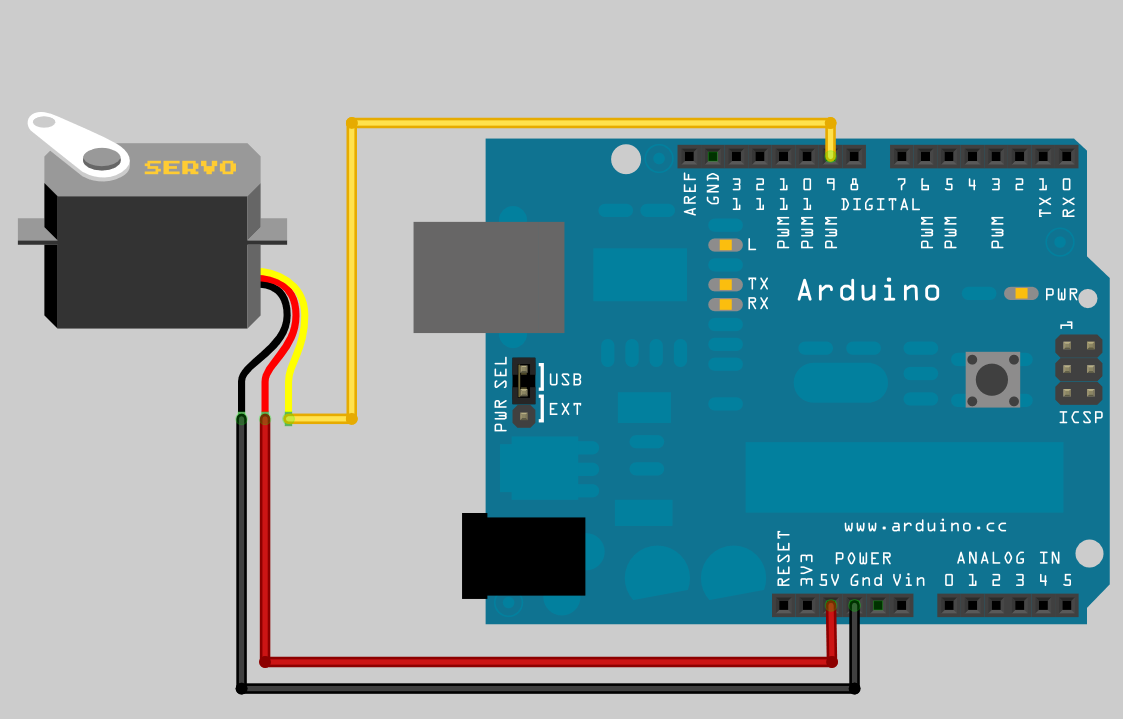
1-1、連線準備
使用裝備 :
- ACER i5 筆電 win10系統
- 樹梅派 Pi4 B (2020 年最新版)
測試架構 :
1-2、上傳程式碼
小編不再多寫,可參考官網 :
This should open the following code in your IDE:
1 /* 2 * rosserial Servo Control Example 3 * 4 * This sketch demonstrates the control of hobby R/C servos 5 * using ROS and the arduiono 6 * 7 * For the full tutorial write up, visit 8 * www.ros.org/wiki/rosserial_arduino_demos 9 * 10 * For more information on the Arduino Servo Library 11 * Checkout : 12 * http://www.arduino.cc/en/Reference/Servo 13 */ 14 15 #if defined(ARDUINO) && ARDUINO >= 100 16 #include "Arduino.h" 17 #else 18 #include <WProgram.h> 19 #endif 20 21 #include <Servo.h> 22 #include <ros.h> 23 #include <std_msgs/UInt16.h> 24 25 ros::NodeHandle nh; 26 27 Servo servo; 28 29 void servo_cb( const std_msgs::UInt16& cmd_msg){ 30 servo.write(cmd_msg.data); //set servo angle, should be from 0-180 31 digitalWrite(13, HIGH-digitalRead(13)); //toggle led 32 } 33 34 35 ros::Subscriber<std_msgs::UInt16> sub("servo", servo_cb); 36 37 void setup(){ 38 pinMode(13, OUTPUT); 39 40 nh.initNode(); 41 nh.subscribe(sub); 42 43 servo.attach(9); //attach it to pin 9 44 } 45 46 void loop(){ 47 nh.spinOnce(); 48 delay(1); 49 }
程式碼扼要說明 :
11行 : 建立一個callback 函式 servoCb (被呼叫後立即返回),該函式是給subscriber使用的,函式的寫法是固定的, type of message is std_msgs::UInt16 ,message name 是 toggle_msg。這個callback函式很單純沒有參考回傳的內容,只是很單純地每次收到一個message,Arduino就會閃爍或熄滅一次LED。
15行 : 建立一個接下來可執行的 publisher或 subscriber。在這裡,我們建立一個subscriber,topic name 是 “servo” , type 是 std_msgs::UInt16。對於訂閱(subscriber)者,必須記住根據訊息(message)來訂閱。最後的兩個參數, Its two arguments are the topic it will be subscribing to and the callback function it will be using.
接著,執行程式
Now, launch the roscore in a new terminal window:
roscore
Next, run the rosserial client application that forwards your Arduino messages to the rest of ROS. Make sure to use the correct serial port: (要注意喔)
rosrun rosserial_python serial_node.py /dev/ttyACM0
再開一個 terminal,
rostopic pub servo std_msgs/UInt16 <angle>
Vethath says:
cialis 20mg for sale
Paulwed says:
viagra online buy india
Janewed says:
tadalafil 20mg price in india
Jackwed says:
best online cialis canada
Carlwed says:
stromectol uk
Nickwed says:
buy tadalafil canada
Evawed says:
where can i buy cialis cheap
Paulwed says:
sildenafil generic otc
Joewed says:
valtrex without presciption
Joewed says:
tadalafil brand name india
Marywed says:
generic ivermectin for humans
Ivywed says:
viagra over the counter canada
Judywed says:
viagra without presc uk
Carlwed says:
tadalafil price usa
Jimwed says:
cheap brand name cialis
Joewed says:
buy viagra sale
Jackwed says:
brand name viagra canada
Nickwed says:
sildenafil 100mg generic
Samwed says:
female viagra tablet
Paulwed says:
where can i buy cialis 20mg
Suewed says:
ivermectin price canada
Kimwed says:
generic viagra professional 100mg
Marywed says:
ivermectin 8 mg
Annawed says:
tadalafil online sale
Markwed says:
tadalafil 20 mg no rx
Amywed says:
where can i buy viagra online in canada
Janewed says:
ivermectin 1 cream 45gm
Ivywed says:
cialis pricing
Amywed says:
tadalafil 20mg online
Jackwed says:
ivermectin buy nz
Kiawed says:
orlistat south africa
Ivywed says:
how to buy cialis in uk
Kiawed says:
buy viagra online us pharmacy
Marywed says:
sildenafil online canada
Kiawed says:
viagra online order usa
Lisawed says:
buy cialis 5mg canada
Joewed says:
medicine prednisone 20mg tablets
Markwed says:
buy modafinil tablets
Evawed says:
buy viagra online united states
Samwed says:
tadalafil from mexico
Evawed says:
how to buy doxycycline online
Suewed says:
sildenafil online purchase in india
Annawed says:
viagra pills australia
Nickwed says:
brand viagra 50 mg
Miawed says:
cheapest brand name viagra
Miawed says:
ivermectin eye drops
Paulwed says:
buy tadalafil paypal
Evawed says:
rx pharmacy cialis
Amywed says:
where to buy valtrex over the counter
Nickwed says:
plaquenil brand name cost
Lisawed says:
online viagra pills
Samwed says:
buy cheap tadalafil
Carlwed says:
viagra pfizer 100mg
Kiawed says:
generic viagra from mexico
Ivywed says:
tadalafil cost 5mg
Jackwed says:
ivermectin tablets order
Kimwed says:
how much is tadalafil 5mg
Annawed says:
tadalafil generic
Suewed says:
cialis canadian
Carlwed says:
tadalafil 5mg best price
Samwed says:
cheap cialis free shipping
Marywed says:
super active viagra
Judywed says:
ivermectin 2%
Janewed says:
synthroid armour
Jimwed says:
tadalafil 20mg online
Jimwed says:
tadalafil order online
Jimwed says:
where can i buy cialis over the counter
Janewed says:
viagra script
Ivywed says:
buy viagra brand
Kimwed says:
buy genuine viagra
Markwed says:
tadalafil buy online india
Nickwed says:
cialis
Carlwed says:
viagra buy online
Evawed says:
best over the counter cialis
Marywed says:
female viagra for sale
Annawed says:
flomax pills
Yonwed says:
viagra voucher
Jackwed says:
viagra prescription cost canada
Zakwed says:
15 mg cialis
Judywed says:
buy generic viagra no prescription
Amywed says:
cialis 50mg pills
Nickwed says:
cialis 20 mg discount coupon
Boowed says:
hydroxychloroquine 300 mg
Joewed says:
cost of ivermectin cream
Suewed says:
no prescription needed pharmacy
Kiawed says:
mexican pharmacies online drugs
Wimwed says:
sildenafil 120
Judywed says:
where to buy cialis otc
Teowed says:
cheap tadalafil canada
Suewed says:
best price generic viagra online
Markwed says:
ivermectin 3mg pill
Ugowed says:
cialis 25mg
Paulwed says:
ivermectin stromectol
Janewed says:
cost for ivermectin 3mg
Carlwed says:
where to buy flagyl online
Yonwed says:
pharmacy coupons
Annawed says:
generic cialis in australia
Lisawed says:
tadalafil 40 mg daily
Ashwed says:
generic viagra india 100mg
Miawed says:
cialis 60mg online
Kiawed says:
sildenafil 20mg daily
Samwed says:
40mg cialis
Ugowed says:
buy augmentin 500mg
Miawed says:
200 mg cialis
Judywed says:
cheapest generic tadalafil online
Teowed says:
cost of generic sildenafil
Joewed says:
cialis 10 mg price
Carlwed says:
buy sildenafil without a prescription
Kimwed says:
clindamycin 150 mg pill
Boowed says:
viagra cream in india
Tedwed says:
plaquenil 2016
Lisawed says:
order cleocin online
Amywed says:
stromectol where to buy
Evawed says:
price of tadalafil 10mg
Zakwed says:
price comparison cialis
Ivywed says:
cialis 20mg canada
Wimwed says:
tadalafil for sale cheap
Annawed says:
tadalafil uk pharmacy
Marywed says:
sildenafil soft tabs 100mg
Jimwed says:
tadalafil from canada to usa
Ashwed says:
where to buy sildenafil 100mg
TAKİPÇİ SATIN AL says:
Excellent blog you have here but I was curious if
you knew of any message boards that cover the same topics discussed in this
article? I’d really love to be a part of online community where
I can get feed-back from other knowledgeable individuals that share the same interest.
If you have any suggestions, please let me know. Thank
you!
Nickwed says:
viagra price usa
Jimwed says:
viagra best buy india
Kiawed says:
purchase ivermectin
Patrickevali says:
ivermectin pour on ivermectin fleas
ucuz takipçi satın al says:
I have read so many articles or reviews concerning
the blogger lovers however this article is actually a good
piece of writing, keep it up.
Takipçi Satın Al says:
I simply could not depart your website prior to suggesting that I actually enjoyed the standard information a person provide for your visitors?
Is gonna be again often to inspect new posts
Teowed says:
uk viagra no prescription
Diedraovers says:
is ivermectin safe ivermectin generic name
Patrickevali says:
ivermectin plus ivermectin coronavirus
Nickwed says:
sildenafil pills
Miawed says:
buy tadalafil online usa
Carlosdrisa says:
ivermectine ivermectin fleas
Ashleybar says:
ivermectin drug interactions covid and ivermectin
Markwed says:
mail pharmacy
Sharylhilla says:
ivermectin drops stromectol otc
Zakwed says:
oral ivermectin cost
Diedraovers says:
ivermectin covid-19 ivermectin side effects in humans
Marywed says:
25mg viagra
Patrickevali says:
purchase ivermectin can i buy ivermectin over the counter
Carlwed says:
voltaren tablets 50mg
Jimwed says:
generic sildenafil without a prescription
Boowed says:
viagra otc mexico
Paulwed says:
sildenafil citrate generic
Samwed says:
stromectol usa
Teowed says:
stromectol order
Wimwed says:
sildenafil 20 mg tablet
Carlosdrisa says:
ivermectin amazon ivermectin otc
Ashleybar says:
ivermectin 6mg ivermectin and covid 19
Sharylhilla says:
ivermectin covid-19 ivermectin prescription
Diedraovers says:
can i buy ivermectin over the counter interactions for ivermectin
Ugowed says:
aurogra 100 uk
Patrickevali says:
wall street journal ivermectin ivermectin brand name
Sharylhilla says:
where to get ivermectin ivermectin covid uptodate
Carlosdrisa says:
who makes ivermectin ivermectin india
instagram takipçi satın a says:
Hi, i read your blog occasionally and i own a similar one and i
was just curious if you get a lot of spam feedback?
If so how do you stop it, any plugin or anything you can advise?
I get so much lately it’s driving me crazy so any assistance is very much appreciated.
Tedwed says:
how to buy viagra
Janewed says:
cheap brand viagra 100mg
Jackwed says:
allopurinol 300mg
Carlosdrisa says:
ivermectin toxicity humans what is ivermectin used for
Ashleybar says:
ivermectin mechanism of action ivermectina 6 mg para que sirve
Sharylhilla says:
ivermectin news ivermectin for coronavirus
Diedraovers says:
ivermectin humans ivermectin oral
Marywed says:
stromectol online
Patrickevali says:
ivermectin news ivermectin covid 19
Carlosdrisa says:
ivermectine ivermectin warnings
Sharylhilla says:
ivermectin interactions prophylactic ivermectin
Jackwed says:
ciallis
Judywed says:
generic sildenafil in canada
Samwed says:
ivermectin tablet 1mg
Paulwed says:
stromectol ebay
Carlosdrisa says:
ivermectin liquid does ivermectin work
Ashleybar says:
is ivermectin over the counter ivermectin dosing
Sharylhilla says:
ivermectin mechanism of action ivermectin cvs over the counter
Diedraovers says:
does ivermectin work ivermectin manufacturer
Patrickevali says:
ivermectin heartworm ivermectina para que es
Ivywed says:
ivermectin cream canada cost
Suewed says:
where can i buy viagra for women
Judywed says:
can i buy viagra over the counter canada
Carlosdrisa says:
ivermectin india ivermectin for sale
Ashleybar says:
ivermectin injection ivermectin flea control
Kimwed says:
modafinil 50 mg tablet
Sharylhilla says:
ivermectina dosis ivermectin pyrantel pamoate
Diedraovers says:
ivermectin tablet ivermectin in covid
Patrickevali says:
ivermectina 6 mg para que sirve wsj ivermectin
Yonwed says:
cialis 20mg price in usa
Evawed says:
viagra australia
Annawed says:
ivermectin rx
Sharylhilla says:
does ivermectin work ivermectina 6mg como tomar [url=https://ivermectinstromectoliq.com/ ]ivermectin covid uptodate [/url]
takipçi satın al says:
Its like you learn my mind! You seem to understand a lot approximately this, like you wrote the book in it or something.
I feel that you just could do with some p.c. to power the
message home a bit, but instead of that, this is excellent blog.
A fantastic read. I will definitely be back.
Amywed says:
stromectol australia
Diedraovers says:
ivermectina dosis adultos https://ivermectinwww.com/
Patrickevali says:
demodex treatment ivermectin https://stromectoliver.com/
ScierceTatt says:
hydroxychloroquine covid 19 https://plaquenilhydrochloroquine.com/#
AnthonyCep says:
provigil reviews https://provigilmodafinilchik.com/
Diedraovers says:
ivermectin pyrantel pamoate https://stromectoliverstrore.com/
HazelPaymn says:
modafinil drug test https://buyprovigilpills.com/
Ashleybar says:
ivermectin https://ivermectinstromectols.com/
Whitneyfaf says:
provigil uses https://modafinilprovigilrx.com/
Rapyaspivycrusy says:
hydroxychloroquine sulfate 200mg https://plaquenilstore.com/#
TogDoollisp says:
buy plaquenil https://plaquenilotc.com/#
Sharylhilla says:
ivermectina dosis adultos https://ivermectinstromectoliq.com/
Carlosdrisa says:
what is ivermectin used for in humans https://ivermectinec.com/
Ashleybar says:
flccc ivermectin https://ivermectinchik.com/
Tedwed says:
where to buy generic cialis online canada
LouiseFline says:
modalert https://modafinilprovigilis.com/
TogDoollisp says:
hydroxychloroquine sulfate 200mg https://plaquenilhydrochlor.com/#
WilliamZef says:
modafinil provigil https://modafinilprovigilrx.com/
Sharylhilla says:
stromectol otc https://ivermectinssl.com/
Lisawed says:
ivermectin lotion
Diedraovers says:
ivermectin online pharmacy https://ivermectinwww.com/
Patrickevali says:
ivermectina tabletas https://stromectoliver.com/
HazelPaymn says:
modafinil pill https://buyprovigilpills.com/
Diedraovers says:
ivermectina para piojos https://stromectolfirststore.com/
AnthonyCep says:
how to get modafinil prescription https://provigilmodafinilchik.com/
JamesVor says:
side effects for ivermectin https://ivermectindelta.com/
Whitneyfaf says:
provigil vs adderall https://mymodafinilprovigil.com/
Ashleybar says:
what is ivermectin used for https://ivermectinstromectols.com/
royal honey vip says:
Nice blog here! Additionally your website loads up fast!
What web host are you using? Can I get your associate hyperlink in your
host? I want my site loaded up as quickly as yours lol
Rapyaspivycrusy says:
hydroxychloroquine and covid https://plaquenilstore.com/#
TogDoollisp says:
hydroxychloroquine coronavirus https://plaquenilotc.com/#
ScierceTatt says:
trump hydroxychloroquine https://plaquenilhydrochloroquine.com/#
LouiseFline says:
modafinil reddit https://modafinilprovigilis.com/
Sharylhilla says:
fda ivermectin https://ivermectinstromectoliq.com/
WilliamZef says:
provigil drug https://modafinilprovigilis.com/
Carlosdrisa says:
ivermectin tablets dosage https://ivermectinabc.com/
Ashleybar says:
demodex treatment ivermectin https://ivermectinchik.com/
Diedraovers says:
ivermectin 3mg tablets https://ivermectinwww.com/
Kimwed says:
best tadalafil tablets in india
Sharylhilla says:
what is ivermectin used to treat https://ivermectinstro.com/
Jackwed says:
us generic cialis
HazelPaymn says:
modafinil https://buyprovigilpills.com/
Wimwed says:
tadalafil tablets online
AnthonyCep says:
modafinil india https://provigilpillsonline.com/
Patrickevali says:
wall street journal ivermectin https://stromectolivermectik.com/
Carlosdrisa says:
ivermectin medicine https://ivermectindelivery.com/
Whitneyfaf says:
modafinil otc https://modafinilprovigilrx.com/
Diedraovers says:
is ivermectin a prescription drug https://stromectolfirststore.com/
Ashleybar says:
ivermectin 3mg tablets https://ivermectinstromectols.com/
Rapyaspivycrusy says:
hydroxychloroquine and covid https://plaquenilstore.com/#
TogDoollisp says:
hydroxychloroquine tablets https://plaquenilotc.com/#
ScierceTatt says:
hydroxychloroquine 200 mg tablet https://plaquenilhydrochloroquine.com/#
Ashwed says:
cialis prescription discount
LouiseFline says:
provigil vs adderall https://modafinilbuddy.com/
Sharylhilla says:
ivermectin fleas https://ivermectinstromectoliq.com/
WilliamZef says:
modafinil reviews https://modafinilprovigilis.com/
Judywed says:
ivermectin canada
Janewed says:
cheap viagra super force
Diedraovers says:
ivermectin 3mg https://ivermectinwww.com/
Carlosdrisa says:
ivermectin mexico https://ivermectinzer.com/
Ashleybar says:
veridex ivermectina https://stromectolivermectinn.com/
HazelPaymn says:
modafinil warnings https://provigilnetwork.com/
Sharylhilla says:
ivermectin walmart https://ivermectinssl.com/
AnthonyCep says:
modalert online https://provigilmodafinilchik.com/
JamesVor says:
ivermectin injection dosage for humans https://ivermectinwholesale.com/
Rapyaspivycrusy says:
hydroxychloroquine and covid https://plaquenilstore.com/#
Whitneyfaf says:
nuvigil vs provigil https://mymodafinilprovigil.com/
Patrickevali says:
ivermectin 12 mg https://stromectolivermectik.com/
TogDoollisp says:
hydroxychloroquine malaria https://plaquenilotc.com/#
Yonwed says:
fluoxetine in mexico
ScierceTatt says:
hydroxychloroquine coronavirus https://plaquenilhydrochloroquine.com/#
Ashleybar says:
ivermectin https://ivermectinstromectols.com/
Diedraovers says:
ivermectin for sale https://stromectoliverstrore.com/
Carlwed says:
buy ivermectin stromectol
Nickwed says:
how can i get a prescription for viagra
LouiseFline says:
modafinil interactions https://modafinilbuddy.com/
WilliamZef says:
modafinil dosage https://provigilpillsonline.com/
Sharylhilla says:
ivermectin mexico https://ivermectinstromectoliq.com/
Boowed says:
zovirax 800mg
Diedraovers says:
topical ivermectin https://ivermectindeltarx.com/
HazelPaymn says:
buy modalert reddit https://buyprovigilpills.com/
Carlosdrisa says:
ivermectin dosing https://ivermectinabc.com/
AnthonyCep says:
modafinilo https://provigilmodafinilchik.com/
TogDoollisp says:
hydroxychloroquine and zinc https://plaquenilotc.com/#
Ashleybar says:
ivermectin dosage for humans https://stromectolivermectinn.com/
JamesVor says:
ivermectin purchase https://ivermectindelta.com/
Whitneyfaf says:
modafinil and alcohol https://modafinilprovigilrx.com/
ScierceTatt says:
trump hydroxychloroquine https://plaquenilhydrochloroquine.com/#
Kiawed says:
tadalafil tablets 10 mg price in india
Sharylhilla says:
ivermectina 6mg https://ivermectinstro.com/
Patrickevali says:
ivermectin toxicity humans https://stromectolivermectik.com/
Ashleybar says:
stromectol dosage https://ivermectinstromectols.com/
Diedraovers says:
ivermectin and covid https://stromectoliverstrore.com/
WilliamZef says:
buy modafinil https://buyprovigilpills.com/
Ashwed says:
buy cialis online india
LouiseFline says:
what is provigil https://modafinilbuddy.com/
Sharylhilla says:
ivermectin and collies https://ivermectinstromectoliq.com/
TogDoollisp says:
hydroxychloroquine malaria https://plaquenilweb.com/#
HazelPaymn says:
armodafinil https://buyprovigilpills.com/
NansiskinsRed says:
hydroxychloroquine https://plaquenilchloroquine.com/#
Diedraovers says:
ivermectin cvs https://ivermectindeltarx.com/
AnthonyCep says:
adrafinil https://provigilpillsonline.com/
Jimwed says:
how to purchase viagra in india
JamesVor says:
ivermectin prophylaxis https://ivermectinwholesale.com/
Ivywed says:
cialis online discount
ScierceTatt says:
hydroxychloroquine covid 19 https://plaquenilhydrochloroquine.com/#
Carlosdrisa says:
ivermectin for covid https://ivermectinzer.com/
Whitneyfaf says:
provigil online https://modafinilprovigilrx.com/
Markwed says:
cialis in malaysia
Samwed says:
cheapest uk sildenafil
Marywed says:
viagra tablets online india
Evawed says:
200 mg cialis
Ashwed says:
online viagra prescription
Ivywed says:
cialis 200 mg price
Ugowed says:
cymbalta 60 mg cost canada
Markwed says:
generic viagra us
Ugowed says:
brand viagra online pharmacy
Annawed says:
generic viagra uk
Suewed says:
sildenafil otc usa
Jackwed says:
stromectol uk
Teowed says:
where can i buy sildenafil online
Yonwed says:
sildenafil tablets 5mg
Nickwed says:
stromectol 12mg online
Paulwed says:
cialis daily india
Lisawed says:
sildenafil online prices
Ivywed says:
ivermectin lotion cost
Boowed says:
tadalafil online 5mg
Amywed says:
buy cialis online from canada
Joewed says:
sildenafil pharmacy prices
Judywed says:
dapoxetine brand name india
Janewed says:
cheap generic cialis uk online
Kiawed says:
buy genuine viagra online canada
Zakwed says:
cymbalta 20
Wimwed says:
cheap generic tadalafil 5mg
Kimwed says:
how much is tadalafil 5mg
Boowed says:
cheap generic cialis uk online
Lisawed says:
online cialis usa
Ugowed says:
cost of generic tadalafil
Jackwed says:
125 mg viagra
Joewed says:
cialis online 60mg
Jimwed says:
tadalafil tablets 10 mg price
Tedwed says:
stromectol 3 mg tablets price
Carlosdrisa says:
ivermectin oral interactions for ivermectin [url=https://ivermectindelivery.com/ ]can you buy ivermectin over the counter [/url]
Paulwed says:
ivermectin 3 mg tablet dosage
Marywed says:
cost of cialis 20mg tablets
Janewed says:
ivermectin pills
Lisawed says:
viagra canada pharmacy
Teowed says:
nolvadex 10mg online
Miawed says:
sildenafil 50 price
Carlwed says:
can you buy generic cialis in canada
Teowed says:
dapoxetine 120 mg
Wimwed says:
cialis 2018
Paulwed says:
where to buy ivermectin
Markwed says:
generic female viagra online
Jimwed says:
how much is cialis generic
Carlwed says:
how can i get clomid over the counter
Lisawed says:
tadalafil tablets 20 mg cost
Annawed says:
tadalafil drug
Samwed says:
where can i buy cheap viagra online
Nickwed says:
tadalafil generic cost
Kiawed says:
allopurinol cost mexico
Kimwed says:
ivermectin 2mg
JamesVor says:
online slots casino slots
Diedraovers says:
casino blackjack casino blackjack
Ashleybar says:
online casino gambling slots games free
Zakwed says:
stromectol 3mg
Sharylhilla says:
free casino games online casino bonus codes
Patrickevali says:
free casino games online free casino
Carlosdrisa says:
casino slots casino slots
Ashleybar says:
no deposit casino online casino
WilliamZef says:
play slots online free casino games online
Tedwed says:
ivermectin medicine
Janewed says:
stromectol over the counter
TogDoollisp says:
free casino games online no deposit casino
NansiskinsRed says:
online slot games online slots
Diedraovers says:
free casino casino online
ScierceTatt says:
no deposit casino play casino slots
Sharylhilla says:
free casino slot games online slot games
Rapyaspivycrusy says:
best online casinos world class casino slots
HazelPaymn says:
play casino free slots
TogDoollisp says:
online gambling casino game
Whitneyfaf says:
world class casino slots online casino bonus
JamesVor says:
online slots online casino slots
Ashleybar says:
play online casino vegas casino slots
Diedraovers says:
online casinos casino game
WilliamZef says:
online slot games big fish casino
AnthonyCep says:
slots games cashman casino slots
Evawed says:
ivermectin 0.5% brand name
Sharylhilla says:
casino online slots real casino slots
Carlosdrisa says:
casino online casino games
Patrickevali says:
online gambling play online casino
TogDoollisp says:
casino games vegas slots online
NansiskinsRed says:
play casino slots free online slots
Ashleybar says:
online gambling online casino gambling
Diedraovers says:
play slots free casino games online
Amywed says:
ivermectin buy
ScierceTatt says:
free slots best online casino
LouiseFline says:
online slot games vegas slots online
HazelPaymn says:
vegas slots online casino game
Ashwed says:
ivermectin 12
Sharylhilla says:
play casino slots online casino bonus
Rapyaspivycrusy says:
big fish casino play online casino
TogDoollisp says:
slots games free casino
Whitneyfaf says:
casino online casino online slots
Boowed says:
tadalafil 2.5 mg cost
JamesVor says:
online casino real money casino online slots
WilliamZef says:
free casino games online slots for real money
Ashleybar says:
casino play big fish casino
Sharylhilla says:
casino online slots free online slots
TogDoollisp says:
cashman casino slots play online casino
Diedraovers says:
free casino games online free casino games online
NansiskinsRed says:
online slots online casinos
Carlosdrisa says:
vegas casino slots casino play
Patrickevali says:
no deposit casino no deposit casino
Ashleybar says:
online casino real money vegas casino slots
ScierceTatt says:
vegas slots online casino slots
LouiseFline says:
play slots online online casinos
HazelPaymn says:
slots online no deposit casino
Diedraovers says:
world class casino slots casino slots
Rapyaspivycrusy says:
slots for real money online slots
Sharylhilla says:
casino online online slots
Ivywed says:
buy real modafinil
TogDoollisp says:
big fish casino play online casino
Whitneyfaf says:
play slots best online casino
WilliamZef says:
casino slots real casino slots
JamesVor says:
slot games play slots
Amywed says:
generic cialis no rx
Ashleybar says:
best online casino slot games
Lisawed says:
trazodone for sale online
TogDoollisp says:
slots online cashman casino slots
NansiskinsRed says:
online casino real money online casino gambling
Carlosdrisa says:
online casino games free casino games online
Diedraovers says:
casino real money vegas casino slots
LouiseFline says:
best online casinos best online casino
Sharylhilla says:
online casino games play casino
ScierceTatt says:
casino play free online slots
HazelPaymn says:
free casino games online casino games
Suewed says:
stromectol 3 mg
Patrickevali says:
real casino slots best online casinos
Diedraovers says:
online casino gambling best online casinos
Rapyaspivycrusy says:
real money casino gold fish casino slots
Ashwed says:
tadalafil 10 mg online india
Ashleybar says:
no deposit casino casino play
TogDoollisp says:
slot games free casino
Whitneyfaf says:
casino online slots casino blackjack
Carlosdrisa says:
slot games online casino bonus
WilliamZef says:
casino play gold fish casino slots
Boowed says:
sildenafil online cheap
JamesVor says:
vegas casino slots slot games
Ashleybar says:
casino blackjack free casino games
TogDoollisp says:
free casino no deposit casino
NansiskinsRed says:
play slots online online casino gambling
Wimwed says:
stromectol for sale
Carlosdrisa says:
play slots online best online casino
LouiseFline says:
online casino real money online casino bonus
HazelPaymn says:
online casino real money best online casino
ScierceTatt says:
casino play online casino slots
Diedraovers says:
casino play cashman casino slots
Sharylhilla says:
play online casino play casino slots
Rapyaspivycrusy says:
world class casino slots casino game
Diedraovers says:
vegas casino slots online gambling
Whitneyfaf says:
casino game play casino slots
Patrickevali says:
online casinos big fish casino
TogDoollisp says:
online slot games best online casinos
Sharylhilla says:
online slots real money casino
WilliamZef says:
slots games free casino online
JamesVor says:
real casino slots free casino
TogDoollisp says:
online casinos free slots
Ashleybar says:
casino online online casino slots
NansiskinsRed says:
world class casino slots play online casino
LouiseFline says:
real money casino casino game
HazelPaymn says:
slots games free slots for real money
ScierceTatt says:
casino play casino bonus codes
Diedraovers says:
slots games free gold fish casino slots
Sharylhilla says:
best online casinos slots online
Rapyaspivycrusy says:
online casinos online slots
Whitneyfaf says:
online casino gambling cashman casino slots
TogDoollisp says:
casino online slots vegas slots online
Diedraovers says:
slots online slots free
WilliamZef says:
casino online slots best online casinos
Annawed says:
provigil for sale canada
Marywed says:
tadalafil 25mg cheap
Ashleybar says:
play slots online vegas slots online
TogDoollisp says:
play slots free casino games
Kiawed says:
buy ivermectin nz
Boowed says:
viagra low price
JamesVor says:
free casino games online best online casino
NansiskinsRed says:
slots for real money online slots
Ashleybar says:
real money casino best online casinos
LouiseFline says:
free casino online casino slots
HazelPaymn says:
play online casino casino online
Joewed says:
viagra pfizer price
ScierceTatt says:
casino slots casino real money
Ugowed says:
stromectol online
Carlosdrisa says:
slot games world class casino slots
Markwed says:
molnupiravir where to buy
Whitneyfaf says:
gold fish casino slots casino online slots
Diedraovers says:
big fish casino world class casino slots
AnthonyCep says:
casino slots online casino real money
Tedwed says:
ivermectin tablets
Rapyaspivycrusy says:
free casino free casino games online
TogDoollisp says:
best online casinos online casino games
Joewed says:
viagra for sale in usa
Sharylhilla says:
casino game casino blackjack
Sharylhilla says:
big fish casino free slots
Ashleybar says:
no deposit casino casino games
Diedraovers says:
free casino slot games free casino slot games
TogDoollisp says:
play online casino online casino gambling
Boowed says:
where can i buy ivermectin
NansiskinsRed says:
real casino slots online casino bonus
LouiseFline says:
online casinos slot games
JamesVor says:
online casino games vegas slots online
Jimwed says:
azithromycin buy online
HazelPaymn says:
cashman casino slots online slot games
Ashleybar says:
cashman casino slots online casino
ScierceTatt says:
free slots slots games
WilliamZef says:
no deposit casino play slots
Carlosdrisa says:
slots games free casino games online
AnthonyCep says:
online casino real money real casino slots
Rapyaspivycrusy says:
real casino slots slots online
Diedraovers says:
free casino games online casinos
TogDoollisp says:
vegas slots online online casino
Patrickevali says:
best online casinos slot games
Sharylhilla says:
slots games free online slots
TogDoollisp says:
casino blackjack online gambling
Diedraovers says:
play slots casino games
Ashleybar says:
real money casino slots online
Markwed says:
tadalafil 5mg tablets price
Paulwed says:
ivermectin 3 mg dose
Kiawed says:
ivermectin 6mg tablet for lice
NansiskinsRed says:
play slots online casino real money
LouiseFline says:
free slots slots online
HazelPaymn says:
no deposit casino slot games
JamesVor says:
vegas slots online slots free
Whitneyfaf says:
casino bonus codes casino online
Boowed says:
cialis 800
Ashleybar says:
free casino slot games online gambling
ScierceTatt says:
play casino best online casinos
AnthonyCep says:
free casino games free casino games online
Rapyaspivycrusy says:
play casino casino play
Judywed says:
cost daily cialis
Carlosdrisa says:
play slots online casino slots
TogDoollisp says:
slot games slot games
Türk Takipçi says:
Hey there! I know this is kinda off topic but I’d figured I’d ask.
Would you be interested in exchanging links or maybe guest writing a blog article
or vice-versa? My website discusses a lot of the same topics as yours
and I think we could greatly benefit from each other.
If you happen to be interested feel free to shoot me an e-mail.
I look forward to hearing from you! Excellent blog by the way!
Diedraovers says:
casino real money casino real money
Carlosdrisa says:
real money casino casino online
TogDoollisp says:
online slot games best online casino
Sharylhilla says:
online casino real money world class casino slots
Diedraovers says:
casino slots play slots
Ashleybar says:
casino online online casino games
NansiskinsRed says:
casino play free casino slot games
LouiseFline says:
best online casino casino games
Wimwed says:
best generic tadalafil
Whitneyfaf says:
free casino slot games casino online
HazelPaymn says:
free slots games vegas slots online
ScierceTatt says:
casino play cashman casino slots
JamesVor says:
casino slots slots free
Ashleybar says:
no deposit casino play casino slots
AnthonyCep says:
casino blackjack big fish casino
Rapyaspivycrusy says:
casino games real money casino
TogDoollisp says:
online casino slots play casino slots
Carlosdrisa says:
best online casino online casinos
Sharylhilla says:
big fish casino free online slots
Patrickevali says:
slots games online casino games
TogDoollisp says:
free casino games online casino games
Sharylhilla says:
big fish casino online slots
Lisawed says:
stromectol cream
Diedraovers says:
gold fish casino slots big fish casino
Ashleybar says:
vegas casino slots casino bonus codes
LouiseFline says:
online casino real money casino slots
NansiskinsRed says:
online casino play casino
HazelPaymn says:
free casino slot games free casino games online
ScierceTatt says:
play slots online free online slots
JamesVor says:
online casino slots free casino games
AnthonyCep says:
free casino slot games online casino slots
Ashleybar says:
free casino games online casino gambling
Rapyaspivycrusy says:
play casino slots casino bonus codes
TogDoollisp says:
cashman casino slots free slots
Carlosdrisa says:
online slots online slot games
Diedraovers says:
play casino slots slots games
TogDoollisp says:
free slots games casino blackjack
Carlosdrisa says:
online slots no deposit casino
Patrickevali says:
casino online slots slot games
Sharylhilla says:
vegas slots online world class casino slots
WilliamZef says:
online casinos cashman casino slots
Diedraovers says:
free slots games big fish casino
Miawed says:
discount generic cialis canada
Ashleybar says:
slots games free free casino slot games
NansiskinsRed says:
play casino slots free slots
Zakwed says:
tadalafil 100mg best price
ScierceTatt says:
world class casino slots free casino slot games
AnthonyCep says:
free slots games free online slots
Kimwed says:
can you buy viagra online in canada
JamesVor says:
big fish casino play casino
Samwed says:
cheap stromectol
Rapyaspivycrusy says:
free online slots online casinos
Ashleybar says:
real money casino online slot games
TogDoollisp says:
casino bonus codes casino play
Ashwed says:
plaquenil 200 mg 60 tab
Carlosdrisa says:
online casino gambling big fish casino
Diedraovers says:
play slots online online casino slots
TogDoollisp says:
free slots games online casino bonus
WilliamZef says:
slot games slots free
Carlosdrisa says:
free online slots vegas slots online
Sharylhilla says:
free casino games casino slots
Patrickevali says:
casino game casino bonus codes
Diedraovers says:
slots for real money vegas slots online
Judywed says:
where to get modafinil
NansiskinsRed says:
free casino games free casino
Ashleybar says:
online gambling free casino slot games
AnthonyCep says:
online casino real money casino online
ScierceTatt says:
cashman casino slots play casino slots
JamesVor says:
slots for real money real money casino
Rapyaspivycrusy says:
free online slots casino games
Ashleybar says:
online casino gambling online casino slots
Ivywed says:
buy cheap viagra online in canada
TogDoollisp says:
play casino slots vegas slots online
HazelPaymn says:
play slots vegas slots online
TogDoollisp says:
free casino slot games online casino
Carlosdrisa says:
world class casino slots play online casino
Diedraovers says:
free slots games online casinos
Janewed says:
cheap viagra 25
Sharylhilla says:
slots games free slots games
Carlosdrisa says:
free casino games no deposit casino
Marywed says:
ivermectin 0.08%
NansiskinsRed says:
online casino games casino play
Diedraovers says:
slot games slots online
Patrickevali says:
vegas casino slots slots free
AnthonyCep says:
online slots play casino slots
Carlwed says:
ivermectin pills human
Teowed says:
where can i buy female viagra in india
ScierceTatt says:
casino online play casino
Ashleybar says:
casino bonus codes casino online slots
WilliamZef says:
free casino games online play slots online
Rapyaspivycrusy says:
casino online slots real money casino
JamesVor says:
real casino slots online slots
TogDoollisp says:
casino play casino online
Ugowed says:
where to buy sildenafil over the counter
Ashleybar says:
play casino slots slots free
TogDoollisp says:
casino game best online casino
Zakwed says:
how can i get sildenafil prescription online
Carlosdrisa says:
online casino real money world class casino slots
Diedraovers says:
free slots games best online casinos
AnthonyCep says:
casino online slots free casino games
Carlosdrisa says:
slots games casino real money
Sharylhilla says:
free online slots casino play
NansiskinsRed says:
casino blackjack slot games
Diedraovers says:
big fish casino slots games
Patrickevali says:
casino play best online casinos
WilliamZef says:
big fish casino online slots
LouiseFline says:
online slots slots games free
Ashleybar says:
casino blackjack slots free
ScierceTatt says:
online casino real money slots free
Suewed says:
ivermectin 1%
JamesVor says:
casino play casino online slots
Rapyaspivycrusy says:
no deposit casino casino online slots
Ashleybar says:
online casino gambling casino play
Jackwed says:
modafinil 600mg
TogDoollisp says:
online casino slots free casino
Diedraovers says:
best online casino slots games
Carlosdrisa says:
free slots games no deposit casino
TogDoollisp says:
free slots online casino
AnthonyCep says:
world class casino slots vegas casino slots
Sharylhilla says:
slots online online casino games
Carlosdrisa says:
casino online slots free slots games
NansiskinsRed says:
casino online slots slots for real money
Diedraovers says:
online casinos play slots
HazelPaymn says:
slots for real money no deposit casino
Whitneyfaf says:
gold fish casino slots world class casino slots
WilliamZef says:
online gambling no deposit casino
Patrickevali says:
free casino slot games free casino slot games
LouiseFline says:
casino games casino slots
ScierceTatt says:
free casino slot games free casino games
Ashleybar says:
world class casino slots free casino games online
JamesVor says:
casino games online slots
Rapyaspivycrusy says:
online casino bonus free online slots
Amywed says:
can i order viagra online
Ashleybar says:
real casino slots casino game
TogDoollisp says:
casino play online casino slots
Wimwed says:
cialis generic tadalafil
Sharylhilla says:
online casino real money best online casinos
TogDoollisp says:
online casino games free casino games
Yonwed says:
viagra online store
AnthonyCep says:
slots online play casino
Carlosdrisa says:
big fish casino vegas casino slots
Sharylhilla says:
big fish casino casino slots
NansiskinsRed says:
casino play free casino
Whitneyfaf says:
real casino slots casino online
Diedraovers says:
free casino games vegas casino slots
Carlosdrisa says:
online casino slots slots online
ScierceTatt says:
cashman casino slots casino real money
LouiseFline says:
online slot games slots online
Patrickevali says:
casino games play casino
Kiawed says:
sildenafil tablets 100mg
Ashleybar says:
vegas slots online slots for real money
Rapyaspivycrusy says:
world class casino slots online slots
JamesVor says:
real money casino slots for real money
TogDoollisp says:
slots games free big fish casino
Ashleybar says:
online casino slots casino slots
Sharylhilla says:
slots for real money casino games
TogDoollisp says:
casino slots casino play
Ashleybar says:
best online casino online casino
Jimwed says:
viagra 130 mg
AnthonyCep says:
casino online casino blackjack
Carlosdrisa says:
no deposit casino free slots
NansiskinsRed says:
play casino online casino
Sharylhilla says:
best online casino casino games
Whitneyfaf says:
free slots games slots for real money
Joewed says:
ivermectin brand name
WilliamZef says:
real casino slots online casino real money
Diedraovers says:
online slot games online casinos
ScierceTatt says:
play casino slots world class casino slots
Carlosdrisa says:
online casino games real money casino
Janewed says:
cialis online free shipping
LouiseFline says:
best online casino casino real money
Yonwed says:
india viagra price
Evawed says:
20 mg cialis
Ashwed says:
generic tadalafil tablets
Miawed says:
tadalafil 10mg coupon
Nickwed says:
where can you get female viagra
Tedwed says:
viagra online order india
Annawed says:
molnupiravir cost per dose
Markwed says:
modafinil best price
Marywed says:
united states tadalafil
Carlwed says:
viagra 150 mg
Ashwed says:
discount cialis canada
Samwed says:
molnupiravir in bangladesh
Ivywed says:
cialis tablets australia
Lisawed says:
modafinil order online india
Ugowed says:
viag
Jackwed says:
2 sildenafil
Judywed says:
tadalafil cheapest price
Annawed says:
buy stromectol canada
Tedwed says:
lasix medicine price
Suewed says:
viagra 800mg
Lisawed says:
tadalafil buy canada
Kimwed says:
tadalafil tablets price in india
Boowed says:
cialis 20 mg generic india
Joewed says:
hydroxychloroquine-o-sulfate
Paulwed says:
generic cialis in mexico
Контейнер 9 серия смотреть онлайн says:
Контейнер 9 серия смотреть онлайн
Wimwed says:
cheap daily cialis online
Carlwed says:
generic ivermectin cream
Teowed says:
generic stromectol
Janewed says:
tadalafil cheapest price
Boowed says:
pfizer viagra for sale
Samwed says:
brand cialis prices
Nickwed says:
best canadian cialis
Yonwed says:
buy viagra 25 mg online india
Wimwed says:
tadalafil 5 mg
Kiawed says:
stromectol medication
Suewed says:
zovirax price usa
Amywed says:
discount cialis pill
Markwed says:
viagra 100 price india
Ivywed says:
tadalafil for sale canadian pharmacy
Tedwed says:
purchase generic viagra
Wimwed says:
viagra india 100mg
Evawed says:
best price tadalafil online
Nickwed says:
where can i buy viagra in south africa
Miawed says:
viagra 150 mg prices
Yonwed says:
how to get viagra without prescription
Ivywed says:
female viagra pills buy in india
Judywed says:
best prices for viagra in canada
Joewed says:
generic cialis soft tabs online
Janewed says:
viagra online order
Carlwed says:
stromectol in canada
Markwed says:
ivermectin cream 1
Teowed says:
sildenafil mexico pharmacy
Suewed says:
tadalafil cheap canada
Marywed says:
cialis soft tabs 40mg
Samwed says:
where to buy generic viagra in canada
Lisawed says:
tadalafil cheap no prescription
Ugowed says:
tadalafil cost in india
Jackwed says:
cialis 20mg professional
Janewed says:
tadalafil 75 mg
Carlwed says:
ivermectin cream 1%
Lisawed says:
35 viagra
Kiawed says:
cialis 40mg online australia
Boowed says:
60 mg sildenafil
Kimwed says:
lowest price tadalafil
Joewed says:
sildenafil without prescription from canada
Tedwed says:
stromectol 3 mg tablet
Teowed says:
where can i buy viagra cheap online
Ashleybar says:
online casino online casino slots casino play
Patrickevali says:
big fish casino free online slots play slots online
Carlosdrisa says:
casino online free online slots best online casino
Whitneyfaf says:
big fish casino online casino real money slots free
AnthonyCep says:
slots online online casinos free casino games online
Rapyaspivycrusy says:
casino play online casinos play slots online
Sharylhilla says:
casino online play slots online free slots
TogDoollisp says:
play casino free casino slot games vegas slots online
JamesVor says:
casino play casino slots play online casino
Diedraovers says:
casino bonus codes no deposit casino online casinos
WilliamZef says:
casino games cashman casino slots slot games
TogDoollisp says:
play casino casino slots free casino
Diedraovers says:
casino bonus codes slots games casino play
NansiskinsRed says:
play online casino best online casinos slots for real money
LouiseFline says:
online casino online casino games real casino slots
Paulwed says:
cialis one a day
Sharylhilla says:
play slots online slots for real money online casino gambling
Carlosdrisa says:
best online casino online casino bonus online casino games
ScierceTatt says:
no deposit casino casino blackjack casino online
Patrickevali says:
casino real money free casino games casino real money
HazelPaymn says:
casino play free casino games online casino bonus
Ashleybar says:
online casinos casino online slots vegas slots online
Kimwed says:
can i buy viagra online legally
Whitneyfaf says:
slots free free online slots slots free
Carlosdrisa says:
casino bonus codes online casino slots online casino gambling
Ashleybar says:
free casino games online free casino games vegas slots online
AnthonyCep says:
free casino games free casino games online online casino slots
Rapyaspivycrusy says:
online casinos casino games free slots
Sharylhilla says:
casino blackjack slot games online casino real money
TogDoollisp says:
slots for real money online casino slots play casino
Yonwed says:
prices for cialis
Diedraovers says:
online slots no deposit casino play online casino
Boowed says:
ivermectin 3 mg
TogDoollisp says:
online casino slots real casino slots big fish casino
WilliamZef says:
casino online slots best online casinos cashman casino slots
Ashleybar says:
best online casinos slots online casino bonus codes
LouiseFline says:
vegas casino slots slots games online casino games
NansiskinsRed says:
online gambling online casino games online slots
Diedraovers says:
play slots online online casino gambling casino real money
Carlosdrisa says:
online casino real money online casino bonus online casino slots
Wimwed says:
stromectol 3mg cost
Patrickevali says:
casino slots online slot games casino game
ScierceTatt says:
casino blackjack free slots free casino slot games
HazelPaymn says:
free online slots vegas casino slots free casino games online
JamesVor says:
slots for real money slot games play slots online
Whitneyfaf says:
free casino games online free slots online gambling
Nickwed says:
price of ivermectin liquid
Carlosdrisa says:
casino slots play slots online online casino
Ashleybar says:
play casino slots no deposit casino online casino gambling
Rapyaspivycrusy says:
free online slots online casino bonus casino bonus codes
AnthonyCep says:
online casino bonus free slots online slots
Diedraovers says:
vegas casino slots no deposit casino free slots
TogDoollisp says:
casino online play slots casino blackjack
Boowed says:
order cialis without a prescription
TogDoollisp says:
free casino slot games vegas slots online play casino
WilliamZef says:
casino real money free casino games online casino online
Sharylhilla says:
online gambling casino real money casino game
Ashleybar says:
free slots casino online free slots
Suewed says:
cialis generic over the counter
Sharylhilla says:
big fish casino casino play slots games free
NansiskinsRed says:
play slots casino real money casino real money
LouiseFline says:
slots games free play slots casino bonus codes
Carlosdrisa says:
casino blackjack slots online play slots online
Patrickevali says:
play slots online casino real money play slots online
Diedraovers says:
no deposit casino online casino slots games free
Evawed says:
australia viagra price
ScierceTatt says:
free slots online casino games slots games
HazelPaymn says:
play slots online online casino slots gold fish casino slots
Judywed says:
buy sildenafil online safely
JamesVor says:
online slots casino game online casino slots
Whitneyfaf says:
online casino slots online big fish casino
Rapyaspivycrusy says:
casino online slots online casino gambling cashman casino slots
AnthonyCep says:
real money casino slots games slot games
Carlosdrisa says:
free casino slot games casino online slots online casino real money
Diedraovers says:
online casino slots online casino games free casino
Ashleybar says:
online casino online casino play slots online
TogDoollisp says:
slots online slots games casino games
togelpengeluaran says:
you will need support or suggestions, write me privately.
I interested in your implementation/use case.
Thank you for the feedback and, please, share problems and solutions with us.
Thank you in advance for that.
TogDoollisp says:
online casino real money world class casino slots casino blackjack
WilliamZef says:
casino bonus codes online casino games slots games free
Ashleybar says:
free casino slot games casino play world class casino slots
Sharylhilla says:
casino online vegas slots online casino bonus codes
Sharylhilla says:
casino play big fish casino play casino slots
NansiskinsRed says:
casino online online casino gambling free casino games online
LouiseFline says:
online casinos online slot games casino slots
Carlosdrisa says:
slots online free casino free casino games
ScierceTatt says:
casino play online casinos casino online
Patrickevali says:
free casino games online real casino slots free online slots
HazelPaymn says:
online casino real money vegas casino slots online casino games
Diedraovers says:
slots online play casino slots games
JamesVor says:
slot games free online slots online slots
Markwed says:
ivermectin 3mg pill
Whitneyfaf says:
vegas casino slots casino game online casinos
Diedraovers says:
casino bonus codes free casino games online play slots
Rapyaspivycrusy says:
casino games real casino slots slots games
AnthonyCep says:
online gambling real money casino online casino bonus
TogDoollisp says:
free slots games play casino vegas slots online
Carlosdrisa says:
free slots games slots online free casino games online
Ashleybar says:
casino real money online slots online casino bonus
Ashleybar says:
play casino slots gold fish casino slots play online casino
TogDoollisp says:
free casino games online online casino games casino blackjack
WilliamZef says:
casino online free slots casino game
Paulwed says:
india pharmacy tadalafil
Carlosdrisa says:
online casino real money play casino best online casinos
Sharylhilla says:
real money casino real money casino free casino
NansiskinsRed says:
play casino online casinos casino real money
LouiseFline says:
gold fish casino slots casino games slots games free
Carlosdrisa says:
free casino games online world class casino slots best online casino
Sharylhilla says:
online gambling real casino slots free casino games
Patrickevali says:
play online casino vegas slots online slots games
ScierceTatt says:
online casinos casino game vegas slots online
HazelPaymn says:
vegas slots online casino blackjack no deposit casino
Whitneyfaf says:
online casino gambling online casino real money best online casinos
Ivywed says:
viagra in south africa
Diedraovers says:
slots free online casinos casino game
Rapyaspivycrusy says:
casino real money slots online cashman casino slots
Annawed says:
tadalafil chewable
AnthonyCep says:
vegas slots online casino blackjack casino play
TogDoollisp says:
online casino bonus no deposit casino best online casino
Ashleybar says:
play slots online gambling best online casinos
TogDoollisp says:
play slots big fish casino online casino
WilliamZef says:
best online casinos play online casino vegas slots online
Sharylhilla says:
casino real money slots games free slots
Ashwed says:
how much is sildenafil 20 mg
Miawed says:
online pharmacy viagra 100mg
Carlosdrisa says:
online casinos online slot games free casino games
NansiskinsRed says:
play slots online slots games free vegas casino slots
LouiseFline says:
online casino games casino slots casino play
Patrickevali says:
free online slots online casino games gold fish casino slots
ScierceTatt says:
slot games online casino bonus play slots
HazelPaymn says:
online casino real money online casino bonus world class casino slots
Yonwed says:
cialis 20 mg generic india
Amywed says:
canadian pharmacy generic tadalafil
Whitneyfaf says:
online casinos slots games free online casino
Diedraovers says:
online casino real money online slot games free slots
Rapyaspivycrusy says:
best online casinos casino game online casino real money
AnthonyCep says:
slots free slots for real money world class casino slots
TogDoollisp says:
online casino gambling real money casino play casino slots
Ashleybar says:
slots games free gold fish casino slots casino blackjack
TogDoollisp says:
no deposit casino casino game gold fish casino slots
Normanjuilk says:
play slots online casino bonus casino real money
WilliamZef says:
slot games free online slots no deposit casino
Sidsmuct says:
free casino games vegas slots online free casino games online
Sharylhilla says:
play casino online casino real money slots free
Joewed says:
sildenafil 25 mg price
Carlosdrisa says:
casino games free casino games online casino games
Diedraovers says:
world class casino slots casino game play slots
LouiseFline says:
play casino casino real money play slots online
Jimwed says:
ivermectin oral solution
Zakwed says:
viagra – uk
Patrickevali says:
cashman casino slots casino games slots games
HazelPaymn says:
online casino gambling online casino gold fish casino slots
Kiawed says:
stromectol price in india
Williamliacy says:
casino online slots slots for real money play casino
Whitneyfaf says:
real casino slots free casino games online free casino games
Ashleybar says:
online casino slots online casino slots casino online slots
Diedraovers says:
gold fish casino slots best online casino play slots
JamesVor says:
online casino slots no deposit casino casino game
Carlosdrisa says:
free casino world class casino slots cashman casino slots
Rapyaspivycrusy says:
vegas slots online online casinos real casino slots
Samuelnum says:
casino bonus codes online casino games online casino real money
Samwed says:
sildenafil 88
AnthonyCep says:
online casino real money free casino slots games free
Ugowed says:
generic cialis daily
TogDoollisp says:
slots games casino bonus codes free casino slot games
Ashleybar says:
free casino games online free online slots best online casinos
Sharylhilla says:
slots for real money play slots online free casino games online
TogDoollisp says:
slots online online casino online casino
Sidsmuct says:
online casino slots games casino bonus codes
WilliamZef says:
casino game casino games slots games
Normanjuilk says:
online casino free casino games online gambling
DavidWhaft says:
play slots online slots casino online slots
Carlosdrisa says:
vegas casino slots slots free online casino
NansiskinsRed says:
online casino slots online online casino
LouiseFline says:
casino online slots online casino real money casino slots
Diedraovers says:
casino slots free casino games online online casino
Janewed says:
buy generic tadalafil 20mg from canada
Patrickevali says:
cashman casino slots free casino games online free casino games online
ScierceTatt says:
free casino world class casino slots best online casinos
HazelPaymn says:
casino play online casino slots online
Carlwed says:
buy stromectol uk
Williamliacy says:
slots for real money slots for real money online gambling
Diedraovers says:
casino bonus codes free casino games online gambling
Whitneyfaf says:
casino bonus codes casino real money gold fish casino slots
Ashleybar says:
free casino slot games slots free no deposit casino
Rapyaspivycrusy says:
casino game online casino slots free online slots
JamesVor says:
big fish casino slot games casino blackjack
Samuelnum says:
slots games free online gambling play casino
AnthonyCep says:
online casino gambling slot games casino online
Carlosdrisa says:
free casino slot games free online slots play slots
TogDoollisp says:
free casino games free casino games online online casino gambling
Ashleybar says:
casino online free casino no deposit casino
Sidsmuct says:
play slots online real money casino play casino
Sharylhilla says:
casino real money big fish casino gold fish casino slots
TogDoollisp says:
casino bonus codes online casino bonus slots for real money
Sharylhilla says:
casino blackjack free slots games free casino
WilliamZef says:
slots free online casino bonus online slots
Normanjuilk says:
online casino games casino game slots free
Carlosdrisa says:
online slot games play casino slots free online slots
DavidWhaft says:
slots games online casino real money best online casinos
NansiskinsRed says:
free casino games online play slots online vegas slots online
LouiseFline says:
slots free gold fish casino slots slots free
Patrickevali says:
slots games best online casino online casino real money
Diedraovers says:
online casinos slots games online casino bonus
Suewed says:
generic viagra in canada
ScierceTatt says:
cashman casino slots free casino games online free casino slot games
HazelPaymn says:
casino slots big fish casino play casino slots
Williamliacy says:
casino real money online gambling play online casino
Diedraovers says:
online casino games slots games online casino
Whitneyfaf says:
online casino casino slots online slot games
Samwed says:
cialis best price uk
Rapyaspivycrusy says:
online slot games free casino play slots online
JamesVor says:
big fish casino world class casino slots free casino slot games
Samuelnum says:
slot games free slots games online casino slots
Ashleybar says:
cashman casino slots world class casino slots casino online slots
AnthonyCep says:
slots games free online casino slots slots games free
Ashleybar says:
gold fish casino slots world class casino slots slots games
TogDoollisp says:
free casino games online slots free free online slots
Sidsmuct says:
casino online online casino slots online casino slots
Sharylhilla says:
online casino gambling casino blackjack slots online
TogDoollisp says:
play online casino online casino games online slots
WilliamZef says:
slot games best online casino online casino real money
Carlosdrisa says:
online casino bonus no deposit casino slot games
Carlosdrisa says:
online slots best online casinos online gambling
Sharylhilla says:
slots online casino online slots casino online
Normanjuilk says:
play online casino play online casino online casino gambling
DavidWhaft says:
online gambling free slots casino bonus codes
NansiskinsRed says:
online casino bonus play slots online slots online
LouiseFline says:
online slots casino bonus codes free casino
Patrickevali says:
online casino bonus online casino games online casino slots
Marywed says:
cialis how to get a prescription
Zakwed says:
cheapest viagra in united states
ScierceTatt says:
slot games slots online slots online
Diedraovers says:
casino online slots free slots games casino game
Miawed says:
sildenafil 100mg uk paypal
HazelPaymn says:
casino game slots for real money slot games
Diedraovers says:
gold fish casino slots vegas slots online casino online slots
Williamliacy says:
free casino free online slots online slots
Whitneyfaf says:
online slot games real casino slots play online casino
Amywed says:
price for viagra in canada
Rapyaspivycrusy says:
casino games online slots free online slots
AnthonyCep says:
play casino slots free casino games online online casino gambling
Samuelnum says:
online casino real money online casinos play online casino
Ashleybar says:
online casino real money play online casino slots online
Ashleybar says:
play slots casino online slots world class casino slots
TogDoollisp says:
online casino gambling slots online online casino slots
Sidsmuct says:
real casino slots play slots online play online casino
Markwed says:
cheap tadalafil
Sharylhilla says:
play casino online slots online casino gambling
TogDoollisp says:
online slots casino online online casino
WilliamZef says:
online casino slots free slots games online casino
Carlosdrisa says:
free slots games vegas casino slots play casino slots
LouiseFline says:
vegas slots online online casino slots play slots
Normanjuilk says:
casino games real casino slots casino real money
Patrickevali says:
online casino games real money casino world class casino slots
DavidWhaft says:
casino game online gambling vegas casino slots
Carlwed says:
viagra generic price canada
ScierceTatt says:
casino game real money casino slots games free
Diedraovers says:
play casino online slot games free casino
HazelPaymn says:
casino play casino games slots free
Whitneyfaf says:
casino online slots online gambling online gambling
Williamliacy says:
slot games slot games online casino real money
Janewed says:
cialis cost per pill
Rapyaspivycrusy says:
casino real money online gambling online slot games
Ashleybar says:
free online slots play slots online online casino bonus
AnthonyCep says:
slot games play slots play online casino
TogDoollisp says:
free online slots online casinos online casino
Samuelnum says:
casino game online casino games big fish casino
Sharylhilla says:
play online casino online casino bonus casino play
Sidsmuct says:
casino real money slots games free world class casino slots
TogDoollisp says:
play online casino play slots play slots
WilliamZef says:
play slots online online casino bonus online casino real money
Carlosdrisa says:
play online casino big fish casino vegas casino slots
NansiskinsRed says:
slots games casino real money gold fish casino slots
LouiseFline says:
no deposit casino casino bonus codes slots for real money
Patrickevali says:
free casino games online slots games free play slots online
Normanjuilk says:
casino blackjack free online slots online casino slots
DavidWhaft says:
real money casino best online casino free casino slot games
ScierceTatt says:
slots games casino online slots casino bonus codes
Diedraovers says:
play online casino casino slots play slots online
HazelPaymn says:
free slots games free casino games online online casino real money
Lisawed says:
where to order cheap viagra
Whitneyfaf says:
online casino bonus world class casino slots online casino games
Williamliacy says:
best online casinos casino blackjack online casino games
Rapyaspivycrusy says:
real casino slots free slots free casino
Ashleybar says:
online casino gambling gold fish casino slots best online casino
AnthonyCep says:
online casino online casino games free slots games
TogDoollisp says:
casino game online casino gambling big fish casino
Sidsmuct says:
casino online slots vegas slots online world class casino slots
Samuelnum says:
free online slots free slots slots free
Sharylhilla says:
online slot games casino real money casino bonus codes
Judywed says:
tadalafil 10mg from canada
TogDoollisp says:
vegas slots online play casino slots slots games
WilliamZef says:
casino online best online casinos casino play
Carlosdrisa says:
play casino gold fish casino slots casino online slots
Ashwed says:
ivermectin stromectol
Tedwed says:
buy generic viagra online
Patrickevali says:
online slots play casino vegas casino slots
NansiskinsRed says:
casino online slots casino play casino online slots
LouiseFline says:
free casino games casino play slots for real money
Normanjuilk says:
online gambling free casino free casino games
DavidWhaft says:
online casino play online casino free slots
ScierceTatt says:
casino game online casino slots online casinos
Diedraovers says:
play slots casino game best online casino
HazelPaymn says:
play casino slots casino blackjack cashman casino slots
Whitneyfaf says:
online casino slots for real money casino real money
Williamliacy says:
play online casino online casino games online casino slots
Rapyaspivycrusy says:
gold fish casino slots online casino bonus big fish casino
Ashleybar says:
free casino slot games play online casino casino online
AnthonyCep says:
casino game free casino games online slot games
Sidsmuct says:
free casino games real casino slots real money casino
Jimwed says:
tadalafil 100mg price
TogDoollisp says:
best online casino vegas slots online no deposit casino
Sharylhilla says:
online gambling world class casino slots casino slots
Samuelnum says:
best online casinos slots online play slots
TogDoollisp says:
online casino games slots games play slots
WilliamZef says:
free casino games free slots real casino slots
Carlosdrisa says:
best online casino online casino slots free slots games
Boowed says:
sildenafil 50mg india
Patrickevali says:
casino games online gambling casino bonus codes
NansiskinsRed says:
casino online best online casino gold fish casino slots
LouiseFline says:
play casino slots real money casino online slot games
Normanjuilk says:
slots games casino blackjack big fish casino
Wimwed says:
buy cheap cialis online
ScierceTatt says:
casino games play online casino slots online
Diedraovers says:
casino games casino slots casino real money
HazelPaymn says:
casino bonus codes big fish casino online casino bonus
Sidsmuct says:
online casino gambling casino bonus codes play slots online
Whitneyfaf says:
slots online play casino slots casino slots
Ashleybar says:
play slots free slots games play casino
Rapyaspivycrusy says:
casino online slots world class casino slots online casino real money
AnthonyCep says:
online casino gambling casino slots casino real money
TogDoollisp says:
play casino free casino games online casino blackjack
Sharylhilla says:
no deposit casino vegas casino slots best online casino
TogDoollisp says:
real money casino casino blackjack play casino
WilliamZef says:
casino games casino online slots real money casino
Carlosdrisa says:
cashman casino slots cashman casino slots casino slots
Jackwed says:
buy ivermectin uk
Kimwed says:
stromectol otc
Patrickevali says:
play online casino play casino slots play online casino
LouiseFline says:
real money casino casino blackjack casino bonus codes
NansiskinsRed says:
casino play online casino gambling real money casino
ScierceTatt says:
online casino slots slots for real money casino online
Diedraovers says:
online slots free slots games online slots
Whitneyfaf says:
free online slots casino blackjack online casino
Ashleybar says:
slots free cashman casino slots free slots games
Rapyaspivycrusy says:
slots games world class casino slots online casino bonus
HazelPaymn says:
play slots online online gambling online casino games
Judywed says:
ivermectin 6
AnthonyCep says:
online casinos online casinos online slots
TogDoollisp says:
online slot games play slots online slots games free
Sharylhilla says:
vegas casino slots gold fish casino slots casino blackjack
TogDoollisp says:
slots games free casino play free casino
Carlosdrisa says:
play slots casino blackjack real money casino
WilliamZef says:
online casino gambling free online slots world class casino slots
Patrickevali says:
online casino slots slots free free casino games
LouiseFline says:
slots games free casino games online casino slots
NansiskinsRed says:
casino bonus codes slots games free casino games
Marywed says:
how much is generic tadalafil
ScierceTatt says:
slots free free slots vegas casino slots
Diedraovers says:
online casino games free slots games casino slots
Whitneyfaf says:
best online casinos real casino slots best online casinos
Samwed says:
5mg tadalafil generic
Ashleybar says:
casino real money play slots play casino slots
Nickwed says:
chewing viagra tablets
Rapyaspivycrusy says:
best online casino free casino slots free
HazelPaymn says:
online gambling online slots free casino games online
AnthonyCep says:
slots games free online casino real money online casino
Sharylhilla says:
casino online casino games free slots
TogDoollisp says:
free casino big fish casino no deposit casino
Amywed says:
30 mg sildenafil
Carlosdrisa says:
free casino slot games free casino games online online casino slots
TogDoollisp says:
casino online casino play online casinos
WilliamZef says:
world class casino slots best online casino slots games free
Patrickevali says:
online gambling slots free online casino bonus
LouiseFline says:
free online slots slots free world class casino slots
NansiskinsRed says:
best online casino free casino casino bonus codes
Ivywed says:
cialis canada pharmacy online
Annawed says:
tadalafil pills for sale
ScierceTatt says:
real money casino gold fish casino slots big fish casino
Wimwed says:
ivermectin over the counter uk
Diedraovers says:
online casino gambling play casino slots no deposit casino
Whitneyfaf says:
play slots online casino slots play casino slots
Ashleybar says:
online gambling play online casino slot games
Rapyaspivycrusy says:
free casino games online casino blackjack world class casino slots
HazelPaymn says:
casino games best online casino free casino games
Sharylhilla says:
best online casino online gambling casino game
TogDoollisp says:
world class casino slots casino game no deposit casino
Carlosdrisa says:
gold fish casino slots world class casino slots free casino slot games
TogDoollisp says:
online casino gambling online casino games free casino games
Suewed says:
buy cialis in singapore
WilliamZef says:
play casino slots online casino vegas casino slots
Patrickevali says:
online gambling real casino slots online casino real money
NansiskinsRed says:
online gambling free online slots online gambling
LouiseFline says:
casino online slots casino online online casino games
Kiawed says:
how much is viagra in mexico
ScierceTatt says:
cashman casino slots free casino games slots games
Diedraovers says:
casino game vegas slots online slot games
Whitneyfaf says:
play casino free slots online gambling
Ashleybar says:
free casino slot games casino blackjack big fish casino
Rapyaspivycrusy says:
big fish casino free online slots casino online slots
HazelPaymn says:
best online casinos cashman casino slots slot games
Sharylhilla says:
play casino play slots online free casino games online
AnthonyCep says:
casino bonus codes cashman casino slots cashman casino slots
TogDoollisp says:
free slots games free casino real casino slots
Paulwed says:
viagra in usa prescription
Carlosdrisa says:
slots for real money slots games free free casino games
togelpengeluaran says:
Slot online
TogDoollisp says:
online casino slots casino online slots casino play
WilliamZef says:
best online casino slots games free online slot games
Patrickevali says:
vegas slots online online gambling free casino games
NansiskinsRed says:
gold fish casino slots free casino games slots games
LouiseFline says:
online casino cashman casino slots casino slots
ScierceTatt says:
free casino slot games free online slots free slots games
Diedraovers says:
real money casino casino real money casino bonus codes
Sidsmuct says:
online casino free casino games online slots online
Ashleybar says:
play slots casino online play casino
Rapyaspivycrusy says:
best online casino online slot games casino play
HazelPaymn says:
free slots online casino online casino games
Whitneyfaf says:
real casino slots free casino games no deposit casino
Sharylhilla says:
real money casino free casino games slots free
AnthonyCep says:
online slot games online casinos free slots games
TogDoollisp says:
cashman casino slots slots games casino online
Carlosdrisa says:
best online casino casino blackjack casino slots
TogDoollisp says:
online casino slots online slot games online gambling
WilliamZef says:
casino games gold fish casino slots play casino slots
Patrickevali says:
best online casino casino play casino play
LouiseFline says:
slots for real money slots games online casino real money
NansiskinsRed says:
casino blackjack world class casino slots casino online slots
Lisawed says:
viagra 100mg buy online india
Diedraovers says:
casino play big fish casino best online casinos
ScierceTatt says:
free slots games free casino slot games big fish casino
Ivywed says:
cialis 20mg usa
Yonwed says:
where to buy stromectol
Ashleybar says:
online casino real money best online casinos online casino games
Evawed says:
generic viagra price
Rapyaspivycrusy says:
online casino real money play casino slots best online casinos
HazelPaymn says:
slot games online gambling free casino games online
Sharylhilla says:
slots for real money play slots slots games free
Whitneyfaf says:
casino play best online casino casino play
AnthonyCep says:
best online casino online casino bonus online casino games
TogDoollisp says:
real money casino free casino slots online
Carlosdrisa says:
online slot games casino slots vegas casino slots
TogDoollisp says:
slots games free free casino games online play slots
WilliamZef says:
casino online slots casino online slots world class casino slots
Teowed says:
where to buy stromectol online
Patrickevali says:
slots online vegas casino slots gold fish casino slots
LouiseFline says:
online casino slot games real casino slots
NansiskinsRed says:
free casino slot games play casino slots online gambling
Diedraovers says:
play slots slots games free casino blackjack
ScierceTatt says:
real casino slots online casino gambling best online casinos
Joewed says:
generic cialis daily canada
Markwed says:
3 tadalafil
Ashleybar says:
slots games gold fish casino slots online casino gambling
Rapyaspivycrusy says:
best online casino world class casino slots online casino bonus
HazelPaymn says:
online slot games online casino free casino slot games
Sharylhilla says:
casino blackjack free casino online casino games
Whitneyfaf says:
slots online casino blackjack free slots
AnthonyCep says:
online casino games slots games world class casino slots
TogDoollisp says:
vegas slots online casino real money real money casino
Carlosdrisa says:
vegas casino slots casino blackjack play slots
Wimwed says:
where to order cialis
TogDoollisp says:
world class casino slots world class casino slots online casino slots
WilliamZef says:
free slots games slots for real money casino slots
Judywed says:
where can i buy oral ivermectin
Paulwed says:
safe place to buy viagra
Patrickevali says:
play casino vegas casino slots slots free
NansiskinsRed says:
best online casinos free slots casino blackjack
LouiseFline says:
online casino slots slots games free online casino
Amywed says:
tadalafil prices
Diedraovers says:
online casinos best online casino online casino gambling
Markwed says:
viagra gel caps
ScierceTatt says:
play online casino free online slots casino slots
Janewed says:
generic tadalafil in usa
Ashleybar says:
casino play free casino games world class casino slots
DavidWhaft says:
online casino gambling cashman casino slots online casino slots
Rapyaspivycrusy says:
online casino games casino slots casino online slots
DavidWhaft says:
slots for real money casino play play slots online
HazelPaymn says:
free online slots play online casino real casino slots
Sharylhilla says:
casino slots casino bonus codes slots games free
Sidsmuct says:
online slot games online casinos slots for real money
AnthonyCep says:
online casino online slots online gambling
TogDoollisp says:
online slot games real money casino slots games
Carlosdrisa says:
online slots play casino free slots games
Ashleybar says:
slots online casino slots gold fish casino slots
Sidsmuct says:
big fish casino free casino games online online casino slots
Normanjuilk says:
online slot games online slots play online casino
DavidWhaft says:
free casino games play online casino casino blackjack
Rapyaspivycrusy says:
slots for real money slots for real money online casino slots
AnthonyCep says:
casino online best online casino play slots
Normanjuilk says:
slots online slots games free casino real money
Williamliacy says:
slots free slots for real money free online slots
Sharylhilla says:
casino online casino bonus codes casino online slots
TogDoollisp says:
online slot games online casino games big fish casino
TogDoollisp says:
no deposit casino casino games play casino slots
Sidsmuct says:
vegas slots online best online casinos casino slots
Carlosdrisa says:
best online casinos best online casinos online casino gambling
WilliamZef says:
casino online slots online real money casino
DavidWhaft says:
online casino gambling casino online slots free
Patrickevali says:
play casino slots free slots games real money casino
Williamliacy says:
play online casino real casino slots casino slots
Sidsmuct says:
online casino gambling online casino real money real casino slots
LouiseFline says:
vegas slots online online casinos play casino
Samuelnum says:
casino slots real money casino play slots online
TogDoollisp says:
casino games slots free online slot games
Williamliacy says:
free casino vegas slots online free casino games
Diedraovers says:
vegas casino slots online casino bonus casino games
WilliamZef says:
online casino slots casino bonus codes cashman casino slots
Patrickevali says:
slots games online slot games casino bonus codes
ScierceTatt says:
free casino slot games vegas slots online free slots games
NansiskinsRed says:
free online slots slots games free online gambling
LouiseFline says:
play slots real money casino slots games
Samuelnum says:
free casino games online free slots games gold fish casino slots
Williamliacy says:
play online casino free slots slots free
Samuelnum says:
play slots online big fish casino play casino
Diedraovers says:
real casino slots slots online online slots
Ashleybar says:
slots games free online casino casino online slots
ScierceTatt says:
casino game gold fish casino slots slot games
HazelPaymn says:
slots games free casino bonus codes online casino bonus
Normanjuilk says:
gold fish casino slots online casino games free slots
NansiskinsRed says:
slots games free best online casino online slot games
Rapyaspivycrusy says:
play casino slots games casino real money
DavidWhaft says:
real money casino casino slots online casino games
Sharylhilla says:
online slot games free casino games casino slots
TogDoollisp says:
casino games free slots games slots for real money
Sidsmuct says:
online casino games free casino slot games slots games free
Carlosdrisa says:
casino blackjack slots games free free casino
Ashleybar says:
online casino slots casino online casino slots
Whitneyfaf says:
vegas casino slots vegas casino slots online casino slots
Samuelnum says:
casino slots real money casino free casino
AnthonyCep says:
free slots games free slots games casino online
Normanjuilk says:
online casino slots casino play world class casino slots
Rapyaspivycrusy says:
casino online slots casino online slots cashman casino slots
DavidWhaft says:
online casino gambling world class casino slots casino bonus codes
Normanjuilk says:
online gambling slots for real money slots games
Sharylhilla says:
online casino bonus casino play casino blackjack
TogDoollisp says:
slots free play slots online casino gambling
Sidsmuct says:
free casino slot games online casino slots online gambling
TogDoollisp says:
free casino casino play vegas slots online
Williamliacy says:
gold fish casino slots free casino games real casino slots
WilliamZef says:
free casino games best online casinos real casino slots
Carlosdrisa says:
online slot games no deposit casino free slots
Patrickevali says:
play casino casino online casino online slots
DavidWhaft says:
free slots play slots online casino
Sidsmuct says:
free casino games free slots games casino online slots
LouiseFline says:
online casino play slots online slots games free
Samuelnum says:
casino games casino play casino games
TogDoollisp says:
online casinos best online casinos best online casinos
Diedraovers says:
free slots casino game best online casinos
Williamliacy says:
real money casino play slots online gambling
WilliamZef says:
online slots slots games world class casino slots
Patrickevali says:
free online slots gold fish casino slots best online casinos
Normanjuilk says:
online casino games online slot games casino game
ScierceTatt says:
slots free online slot games world class casino slots
NansiskinsRed says:
free casino play slots online online gambling
DavidWhaft says:
best online casino free casino slots games
LouiseFline says:
play slots free casino games online casino real money
Sidsmuct says:
online gambling online casinos online slot games
Williamliacy says:
slots games real casino slots free slots games
Whitneyfaf says:
online casinos cashman casino slots online slot games
Ashleybar says:
real casino slots gold fish casino slots online slots
Samuelnum says:
casino real money real casino slots slot games
AnthonyCep says:
casino online slot games casino play
Diedraovers says:
online casino gambling online casinos play casino
ScierceTatt says:
slots games casino bonus codes online casino real money
Normanjuilk says:
free casino vegas slots online free casino games online
NansiskinsRed says:
casino game play online casino online casino real money
Kiawed says:
cheap tadalafil 5mg
Whitneyfaf says:
free casino games online real casino slots big fish casino
Sharylhilla says:
free casino free casino slot games
Rapyaspivycrusy says:
free casino games online casino real money casino games
DavidWhaft says:
online casinos slots games real money casino
TogDoollisp says:
free slots casino bonus codes no deposit casino
Sidsmuct says:
vegas slots online play slots online slot games
Carlosdrisa says:
vegas slots online online casino slots casino play
Ashleybar says:
real casino slots casino slots play casino slots
Samuelnum says:
play slots casino slots casino online slots
Williamliacy says:
slots free casino games slot games
AnthonyCep says:
free casino games online real money casino online gambling
Ashwed says:
cost of generic cialis in canada
Normanjuilk says:
casino online slots online slot games slots for real money
Sharylhilla says:
real casino slots vegas slots online real money casino
Rapyaspivycrusy says:
free casino slot games no deposit casino free casino slot games
DavidWhaft says:
real casino slots vegas slots online casino online slots
TogDoollisp says:
play slots online slots for real money play slots
Sidsmuct says:
online gambling free slots games play slots online
Patrickevali says:
slots games free slots online slots
Sidsmuct says:
modafinil provigil modalert 200 buy modalert online
WilliamZef says:
world class casino slots casino blackjack casino blackjack
TogDoollisp says:
free slots slot games online gambling
Normanjuilk says:
provigil over the counter provigil side effects modafinil prescription online
Williamliacy says:
no deposit casino slots games no deposit casino
Judywed says:
tadalafil 20 mg online india
Amywed says:
ivermectin tablets
LouiseFline says:
casino games real casino slots slots games free
TogDoollisp says:
best online casinos online casino bonus casino game
WilliamZef says:
best online casinos online casino gambling play casino
Samuelnum says:
best online casino casino online vegas slots online
Williamliacy says:
online casino games casino games slots free
Sidsmuct says:
provigil prescription modalert review provigil 100mg
Samuelnum says:
provigil cost modalert provigil over the counter
Diedraovers says:
slots games slots free online casino bonus
ScierceTatt says:
vegas casino slots slots games free play slots
Whitneyfaf says:
real money casino vegas slots online vegas slots online
NansiskinsRed says:
gold fish casino slots casino real money play casino
LouiseFline says:
online casino slots online casinos online casino
Ashleybar says:
casino online slot games casino online
Samuelnum says:
casino slots free casino slot games online casino bonus
AnthonyCep says:
play slots online free online slots online casino real money
Diedraovers says:
slots games best online casino free slots
HazelPaymn says:
online casino real money cashman casino slots online slots
ScierceTatt says:
real money casino best online casinos online casino real money
Boowed says:
stromectol 6 mg dosage
Normanjuilk says:
online casino games no deposit casino best online casinos
NansiskinsRed says:
casino bonus codes big fish casino play slots online
Sharylhilla says:
play slots online big fish casino slots online
Rapyaspivycrusy says:
free slots big fish casino slots games free
Carlosdrisa says:
free casino games real money casino play casino slots
Ashleybar says:
online casino gambling casino online slots casino blackjack
DavidWhaft says:
online casinos slots online real casino slots
TogDoollisp says:
slots free casino game online slot games
Sidsmuct says:
online casino games online casino slots online slot games
AnthonyCep says:
slots free online casino real money play slots online
Miawed says:
ivermectin generic cream
Normanjuilk says:
vegas casino slots free online slots vegas casino slots
Jackwed says:
viagra pills online for sale
Sharylhilla says:
casino play slots games free slot games
Rapyaspivycrusy says:
slots for real money free online slots best online casinos
Sidsmuct says:
buy modafinil online provigil 100mg provigil online
WilliamZef says:
cashman casino slots slots online online casino real money
Williamliacy says:
provigil price modalert review buy modalert
Carlosdrisa says:
vegas casino slots free casino casino slots
TogDoollisp says:
free casino slot games casino bonus codes online casino gambling
Samuelnum says:
modalert 200 buy modafinil modafinil generic
Patrickevali says:
slots free online slot games best online casino
DavidWhaft says:
provigil for sale buy provigil online modafinil 200mg
Sidsmuct says:
free casino slot games free casino games online real casino slots
DavidWhaft says:
casino online slots free casino slot games slots online
TogDoollisp says:
casino play vegas slots online casino play
Williamliacy says:
free casino games online online gambling free casino games
LouiseFline says:
slots games free free slots games casino game
Sidsmuct says:
real casino slots online casino slots online casino bonus
Nickwed says:
20mg tadalafil canada
Sidsmuct says:
modafinil provigil modafinil side effects provigil price
Williamliacy says:
modafinil side effects provigil 200 mg buy provigil
Normanjuilk says:
buy modalert modafinil 200mg order modafinil
WilliamZef says:
online casino slots casino real money casino games
HazelPaymn says:
online slots free slots games no deposit casino
TogDoollisp says:
free casino slots for real money online casino gambling
Patrickevali says:
online casino gambling online casino bonus free casino slot games
Samuelnum says:
vegas slots online online casinos casino online slots
Diedraovers says:
slots free slots games free play online casino
Williamliacy says:
play slots casino bonus codes no deposit casino
ScierceTatt says:
cashman casino slots casino play slots games free
LouiseFline says:
online casino slots games free play slots online
NansiskinsRed says:
vegas slots online casino games casino online
Sidsmuct says:
slots free casino slots play slots online
HazelPaymn says:
play online casino casino online slots online casinos
Ashleybar says:
real casino slots casino real money slots free
Diedraovers says:
online casino slots real casino slots play casino
Ugowed says:
sildenafil citrate generic viagra
AnthonyCep says:
slots games free slots games vegas slots online
Samuelnum says:
real casino slots online casino bonus gold fish casino slots
ScierceTatt says:
free casino slot games real money casino online casino games
NansiskinsRed says:
cashman casino slots best online casino casino game
Normanjuilk says:
no deposit casino slot games online casino gambling
Sharylhilla says:
slots online online casino bonus slots games
Annawed says:
ordering viagra from india
Rapyaspivycrusy says:
vegas slots online online casino gambling casino blackjack
Ashleybar says:
cashman casino slots casino bonus codes online casinos
Carlosdrisa says:
free slots games casino real money online casino real money
TogDoollisp says:
online casino bonus slots games free slots for real money
DavidWhaft says:
online slot games free casino free casino games
Kimwed says:
over the counter viagra pills
AnthonyCep says:
online casinos casino blackjack free casino games
Normanjuilk says:
online slots slots games free casino game
Sharylhilla says:
online casino bonus world class casino slots free slots games
Sidsmuct says:
order modafinil provigil side effects provigil pill
WilliamZef says:
slots games world class casino slots online casino slots
Rapyaspivycrusy says:
slots games play online casino world class casino slots
Carlosdrisa says:
best online casino vegas slots online big fish casino
Normanjuilk says:
provigil 200 mg buy modalert online provigil over the counter
TogDoollisp says:
free casino free casino games online big fish casino
TogDoollisp says:
slots online free casino games online online casino gambling
DavidWhaft says:
big fish casino casino online slots slots games
Williamliacy says:
play casino casino game real casino slots
Patrickevali says:
casino play free online slots slots games
Sidsmuct says:
provigil 100 mg provigil medication buy modafinil
Whitneyfaf says:
no deposit casino no deposit casino vegas slots online
Samuelnum says:
order modafinil buy provigil online modafinil generic
Sidsmuct says:
casino blackjack online casino gambling free casino
WilliamZef says:
big fish casino best online casinos vegas slots online
TogDoollisp says:
play casino slots casino real money vegas casino slots
Diedraovers says:
vegas slots online casino online slots world class casino slots
Samuelnum says:
vegas slots online online casino real money online casino gambling
HazelPaymn says:
casino online slots play online casino casino online slots
ScierceTatt says:
free online slots online slots real casino slots
Denwed says:
[url=http://prozac.quest/]buy generic prozac no prescription[/url] [url=http://tadalafilprofessional.com/]cheap generic tadalafil uk[/url] [url=http://newtadalafil.com/]tadalafil 5mg canada[/url] [url=http://tadalafilbr.com/]tadalafil 7mg[/url] [url=http://tadalafilpillsed.com/]tadalafil compare prices[/url]
Williamliacy says:
slots games free casino bonus codes casino online slots
Sidsmuct says:
provigil cost provigil medication provigil prescription
Patrickevali says:
vegas casino slots big fish casino online gambling
NansiskinsRed says:
online gambling free casino world class casino slots
Sidsmuct says:
online casinos slots online real casino slots
Ashleybar says:
best online casino slots for real money slots games
Samuelnum says:
provigil over the counter provigil 100 mg modalert review
Wimwed says:
cialis 10mg canada
Diedraovers says:
free slots games slots online online casino bonus
AnthonyCep says:
casino games vegas slots online slot games
Marywed says:
fluoxetine mexico
Marywed says:
women cialis
Samuelnum says:
casino game gold fish casino slots casino real money
ScierceTatt says:
free casino games online online gambling play slots online
Sharylhilla says:
real money casino gold fish casino slots slots games free
NansiskinsRed says:
slots free play online casino online casino gambling
Normanjuilk says:
casino online slots free slots games online casino real money
Ashleybar says:
slot games free casino games online online slots
Rapyaspivycrusy says:
online gambling online casinos play online casino
Carlosdrisa says:
cashman casino slots casino games free casino slot games
TogDoollisp says:
vegas slots online play casino slots play slots online
AnthonyCep says:
slots for real money casino games online slot games
DavidWhaft says:
online casino slots world class casino slots slots games free
Sharylhilla says:
free casino games online no deposit casino slots for real money
WilliamZef says:
vegas casino slots online casino slots online casino real money
Normanjuilk says:
online casino games casino online free slots
HazelPaymn says:
casino bonus codes world class casino slots free slots
Carlwed says:
generic viagra rx
Rapyaspivycrusy says:
play online casino online casino slot games
Carlosdrisa says:
casino game casino real money slot games
TogDoollisp says:
free slots games world class casino slots play slots online
TogDoollisp says:
online casino gambling free online slots best online casinos
DavidWhaft says:
online slots casino game casino games
Patrickevali says:
online gambling play online casino online casino gambling
Williamliacy says:
online casino real money free slots games play slots online
Sidsmuct says:
modafinil pill provigil medication provigil for sale
DavidWhaft says:
buy provigil provigil 100mg provigil medication
Sidsmuct says:
online gambling free casino slot games slots free
WilliamZef says:
free online slots play slots online casino games
HazelPaymn says:
play casino free casino slot games big fish casino
Diedraovers says:
free slots games free casino slot games play slots
TogDoollisp says:
real casino slots play online casino free online slots
Samuelnum says:
modafinil side effects modafinil pill provigil
ScierceTatt says:
slots games free free casino games play slots online
Patrickevali says:
online casino gambling slot games casino blackjack
Samuelnum says:
casino blackjack casino blackjack world class casino slots
Williamliacy says:
casino online slots online casino casino real money
Normanjuilk says:
modafinil side effects modafinil modalert
NansiskinsRed says:
world class casino slots casino online slots for real money
Sidsmuct says:
vegas casino slots online gambling free casino slot games
Ashleybar says:
play online casino online casino real money free casino
DavidWhaft says:
modalert review provigil over the counter modafinil prescription
AnthonyCep says:
free casino games play slots online free casino games online
Diedraovers says:
slot games slots online best online casinos
картинки для настроения очень смешные says:
Юмор! Юмор!! Юмор!!!
ScierceTatt says:
casino online slots free casino online casino games
Samuelnum says:
free slots free casino games free casino games online
Sharylhilla says:
no deposit casino play slots online casino real money
Samuelnum says:
provigil price provigil over the counter modafinil prescription
Ashleybar says:
best online casino free slots cashman casino slots
NansiskinsRed says:
slots games free slots games free free slots
Normanjuilk says:
free casino games vegas casino slots online gambling
Rapyaspivycrusy says:
casino blackjack best online casinos world class casino slots
AnthonyCep says:
free casino free slots free casino games online
TogDoollisp says:
slots games free online casino slots slots games free
Carlosdrisa says:
online casino bonus best online casino slot games
Jackwed says:
where to buy cialis online in usa
Whitneyfaf says:
slot games free casino games online online casino games
DavidWhaft says:
play slots online slot games cashman casino slots
WilliamZef says:
slots games online casinos online casino
Sharylhilla says:
online casino real money casino bonus codes online casino games
Normanjuilk says:
slots for real money casino slots online casino gambling
Rapyaspivycrusy says:
casino game vegas casino slots real casino slots
TogDoollisp says:
free casino slot games casino online slots slot games
HazelPaymn says:
casino blackjack best online casinos casino slots
Patrickevali says:
play slots online play slots casino play
Carlosdrisa says:
free online slots online casino slots free casino
TogDoollisp says:
free slots online casino gambling real casino slots
Sidsmuct says:
provigil price provigil medication modafinil generic
WilliamZef says:
casino games vegas slots online big fish casino
DavidWhaft says:
play casino slots free online slot games
Williamliacy says:
real casino slots free casino slot games play online casino
Sidsmuct says:
casino slots online casino games online casino gambling
Diedraovers says:
free casino slot games casino play play online casino
Williamliacy says:
buy provigil online buy modafinil modafinil pill
TogDoollisp says:
big fish casino slots games free online slots
Takipçi satın al says:
I have read so many articles or reviews on the topic of the
blogger lovers however this post is really a pleasant post, keep
it up.
Sidsmuct says:
provigil medication modalert 200 provigil 100 mg
DavidWhaft says:
buy modafinil online buy modafinil online provigil side effects
ScierceTatt says:
slots online big fish casino online casino games
Samuelnum says:
play online casino free online slots free casino slot games
Williamliacy says:
casino play play casino no deposit casino
Ashleybar says:
online casino real money slots games free slots online
Sidsmuct says:
slots games slots for real money online casino slots
NansiskinsRed says:
play slots online casino real money online casino bonus
AnthonyCep says:
online casino slots slots games vegas slots online
Diedraovers says:
slots for real money free slots casino games
Sidsmuct says:
buy provigil modafinil buy modalert online
Normanjuilk says:
modafinil modafinil prescription online provigil pill
Sharylhilla says:
no deposit casino play online casino vegas slots online
ScierceTatt says:
slots free free online slots gold fish casino slots
Samuelnum says:
vegas slots online online slots online casino slots
Ashleybar says:
slots games free world class casino slots online slots
Whitneyfaf says:
free slots free casino no deposit casino
AnthonyCep says:
online casino gambling casino online slots casino play
NansiskinsRed says:
slots games free casino slots free online slots
Normanjuilk says:
online casino slots online slots online slots
Rapyaspivycrusy says:
slots free online casino slots online gambling
Carlosdrisa says:
free casino real money casino online slot games
TogDoollisp says:
best online casino casino bonus codes casino real money
WilliamZef says:
free slots games casino game casino blackjack
Whitneyfaf says:
free casino casino blackjack gold fish casino slots
Sharylhilla says:
slots for real money big fish casino play casino slots
DavidWhaft says:
vegas slots online online casino bonus best online casino
Sidsmuct says:
modafinil generic how to get modafinil prescription modafinil prescription
Williamliacy says:
provigil generic provigil 200 mg buy modalert
Normanjuilk says:
casino play online casino slots play online casino
TogDoollisp says:
online casino slots slots games free online casino games
Rapyaspivycrusy says:
online casino games online casino slots online casino games
Patrickevali says:
best online casinos free slots games online slots
Carlosdrisa says:
casino play play slots online play slots
TogDoollisp says:
slots online casino online play slots
WilliamZef says:
play casino casino real money online casino bonus
Williamliacy says:
gold fish casino slots free slots games online casino games
DavidWhaft says:
slots games online casino no deposit casino
Sidsmuct says:
slot games slots games online casinos
Jimwed says:
viagra capsules online in india
Diedraovers says:
casino real money casino real money slots free
Markwed says:
price of stromectol
Samuelnum says:
order modafinil modafinil pill buy modafinil online
Normanjuilk says:
provigil online provigil online provigil cost
TogDoollisp says:
casino slots online casino slots online gambling
Williamliacy says:
modalert review modalert online modafinil generic
Patrickevali says:
online casino online casino games online casino gambling
ScierceTatt says:
online casino bonus free casino games online casino gambling
Ashleybar says:
play online casino slots online world class casino slots
Tedwed says:
viagra india generic
Samuelnum says:
big fish casino slot games online casino gambling
Sidsmuct says:
slots games free free casino online casino gambling
AnthonyCep says:
casino games free slots games casino online
Williamliacy says:
casino online online casino bonus casino play
NansiskinsRed says:
casino blackjack online gambling free online slots
Diedraovers says:
world class casino slots play slots online gambling
LouiseFline says:
online casinos online casino real money online casino
Sharylhilla says:
online casino gambling online casino gambling slots for real money
Ashleybar says:
online casino bonus online slots casino slots
AnthonyCep says:
vegas slots online casino games free casino
Samuelnum says:
casino real money real casino slots free slots
Whitneyfaf says:
casino blackjack play slots online casino online
NansiskinsRed says:
best online casinos slots free slots online
Normanjuilk says:
free casino games online casino games world class casino slots
Rapyaspivycrusy says:
online casino gambling vegas casino slots free casino slot games
Carlosdrisa says:
casino blackjack casino games casino slots
TogDoollisp says:
play slots online slot games free casino games
WilliamZef says:
no deposit casino free casino games cashman casino slots
Sharylhilla says:
casino blackjack free slots real casino slots
DavidWhaft says:
best online casino big fish casino free slots
Patrickevali says:
free slots games free slots games big fish casino
Normanjuilk says:
best online casinos slots for real money slots online
TogDoollisp says:
casino games slots games best online casino
Rapyaspivycrusy says:
casino games online casino free casino games
Carlosdrisa says:
cashman casino slots gold fish casino slots best online casinos
TogDoollisp says:
online casino real money free casino games casino slots
WilliamZef says:
online casino casino game online casino slots
Sidsmuct says:
modalert 200 modafinil modalert
DavidWhaft says:
modafinil prescription provigil cost modafinil provigil
Sidsmuct says:
free casino games online no deposit casino casino games
Williamliacy says:
casino bonus codes play slots online free online slots
Diedraovers says:
no deposit casino world class casino slots casino bonus codes
DavidWhaft says:
free casino slot games online slot games real casino slots
Normanjuilk says:
modafinil prescription online modafinil provigil 200 mg
Patrickevali says:
play online casino play slots online online casino gambling
Williamliacy says:
modalert provigil buy modafinil online
TogDoollisp says:
casino online gold fish casino slots slots for real money
LouiseFline says:
play slots online casino online slots slot games
Ashleybar says:
casino slots slots for real money casino blackjack
ScierceTatt says:
free slots games slots free online casino slots
Sidsmuct says:
no deposit casino casino blackjack online casino games
Sidsmuct says:
provigil 200 mg modalert review modalert review
Samuelnum says:
modafinil prescription online modafinil side effects provigil cost
NansiskinsRed says:
big fish casino casino online slots free casino
Diedraovers says:
casino play play casino best online casinos
Williamliacy says:
best online casino world class casino slots slot games
HazelPaymn says:
play casino slots play casino slots slots for real money
Normanjuilk says:
buy provigil online provigil for sale modafinil 200mg
Sharylhilla says:
no deposit casino online gambling slots for real money
Williamliacy says:
modafinil generic provigil price modafinil online
Ashleybar says:
gold fish casino slots casino bonus codes play online casino
ScierceTatt says:
gold fish casino slots free casino games online online casino
TogDoollisp says:
best online casinos real casino slots online slot games
Carlosdrisa says:
free slots vegas slots online play slots online
Rapyaspivycrusy says:
real money casino slots for real money slots games free
WilliamZef says:
casino play free casino free casino slot games
Markwed says:
generic tadalafil in canada
Normanjuilk says:
cashman casino slots slots for real money real money casino
Sharylhilla says:
free casino free casino free casino
DavidWhaft says:
no deposit casino online gambling cashman casino slots
Patrickevali says:
casino bonus codes online casino bonus slots games free
WilliamZef says:
online gambling casino blackjack online casinos
Carlosdrisa says:
real money casino free slots online casinos
Rapyaspivycrusy says:
vegas casino slots big fish casino play slots online
TogDoollisp says:
free casino slot games free slots games best online casinos
Normanjuilk says:
online casino real money casino online slots casino bonus codes
Annawed says:
tadalafil 90 tabs
Ivywed says:
where can i buy sildenafil online
HazelPaymn says:
vegas casino slots free casino games slot games
Sidsmuct says:
online gambling free casino casino blackjack
Diedraovers says:
slots for real money cashman casino slots casino online slots
Williamliacy says:
free online slots free slots online casino bonus
DavidWhaft says:
best online casino casino play slots free
Sidsmuct says:
order modafinil provigil price modalert 200
Patrickevali says:
big fish casino best online casino slot games
TogDoollisp says:
slot games big fish casino free online slots
ScierceTatt says:
world class casino slots casino games vegas slots online
Amywed says:
price of 100mg viagra
Samuelnum says:
modalert online buy modalert online modalert 200
HazelPaymn says:
online slot games online casinos real money casino
Ashleybar says:
best online casinos play slots free casino games
Sidsmuct says:
slots for real money online casino bonus online gambling
Diedraovers says:
free slots casino slots casino online
Samuelnum says:
play casino casino blackjack casino real money
Williamliacy says:
best online casinos online slot games casino play
TogDoollisp says:
big fish casino online gambling free casino games online
ScierceTatt says:
play slots online world class casino slots casino game
Sidsmuct says:
how to get modafinil prescription buy provigil online modafinil online
Yonwed says:
tadalafil canadian pharmacy price
NansiskinsRed says:
play slots online world class casino slots casino games
Normanjuilk says:
provigil 200 mg modafinil side effects modalert
Sharylhilla says:
vegas slots online slots free free online slots
Ashleybar says:
vegas casino slots slots games casino online
Williamliacy says:
order modafinil buy provigil online modafinil prescription
Samuelnum says:
buy modalert provigil generic provigil prescription
WilliamZef says:
play casino casino slots online slot games
Rapyaspivycrusy says:
casino game casino games slots games free
Samuelnum says:
online casino games free casino games online casino online
Carlosdrisa says:
slots games free online casino real money slots free
Normanjuilk says:
play casino online gambling free online slots
Paulwed says:
generic sildenafil citrate 100mg
Sharylhilla says:
casino slots free online slots online casino
Nickwed says:
cialis 5mg daily
Kiawed says:
tadalafil 7.5 mg
HazelPaymn says:
online casino bonus big fish casino online casinos
Normanjuilk says:
provigil 200 mg provigil 100mg modafinil generic
WilliamZef says:
slots games free real casino slots play slots online
Samwed says:
cheapest tadalafil 5mg
DavidWhaft says:
slots online online slot games online casino slots
Patrickevali says:
world class casino slots play casino slots online casino gambling
Williamliacy says:
provigil for sale order modafinil modalert review
Rapyaspivycrusy says:
big fish casino world class casino slots online casino
TogDoollisp says:
online casino gambling casino games casino games
Carlosdrisa says:
slots for real money no deposit casino real casino slots
Normanjuilk says:
slots for real money online casinos real casino slots
Sidsmuct says:
provigil side effects provigil medication provigil cost
Teowed says:
cheap cialis india
AnthonyCep says:
casino online slots real casino slots real casino slots
Sidsmuct says:
online slot games online casinos casino play
Diedraovers says:
play casino slots world class casino slots online casino bonus
LouiseFline says:
cashman casino slots vegas casino slots online casino gambling
ScierceTatt says:
cashman casino slots best online casinos casino games
DavidWhaft says:
free slots casino online slots casino blackjack
Williamliacy says:
casino play free casino slot games online slots
Patrickevali says:
online casino bonus free slots online casino gambling
TogDoollisp says:
slot games online casino bonus free online slots
NansiskinsRed says:
online casino real money online casino slots casino blackjack
Ashleybar says:
play casino free casino slot games slots for real money
Sidsmuct says:
free slots casino online casino bonus codes
Diedraovers says:
best online casino big fish casino free slots
TogDoollisp says:
online gambling casino play world class casino slots
Sidsmuct says:
modafinil online provigil 100mg modafinil pill
Judywed says:
discount viagra india
Samuelnum says:
casino blackjack online slot games big fish casino
Williamliacy says:
free online slots casino slots casino games
DavidWhaft says:
provigil online modalert review provigil prescription
NansiskinsRed says:
slots free vegas casino slots online casino bonus
Sharylhilla says:
online casino games free slots games slots online
Ashleybar says:
play slots casino blackjack world class casino slots
WilliamZef says:
cashman casino slots play online casino big fish casino
Rapyaspivycrusy says:
free slots games casino online best online casino
Carlosdrisa says:
no deposit casino slots online gold fish casino slots
Sidsmuct says:
provigil side effects modafinil weight loss order modafinil
Williamliacy says:
provigil 200 mg modafinil pill provigil
HazelPaymn says:
casino bonus codes free casino slot games casino real money
Samuelnum says:
free casino games best online casinos casino online slots
Normanjuilk says:
slots for real money real casino slots gold fish casino slots
Sharylhilla says:
play slots real casino slots slots online
LouiseFline says:
free casino free casino slots games free
WilliamZef says:
slots free play casino slots free
Kiawed says:
buy tadalafil 10mg india
Patrickevali says:
casino online slots online casinos play slots online
HazelPaymn says:
big fish casino online casino games world class casino slots
DavidWhaft says:
free casino online casinos best online casino
Rapyaspivycrusy says:
free casino games online casino gambling slots free
TogDoollisp says:
casino real money play slots online slots games free
Carlosdrisa says:
vegas slots online real money casino best online casinos
Sidsmuct says:
modafinil modafinil prescription provigil
Williamliacy says:
provigil price buy modalert online provigil price
TogDoollisp says:
online slot games vegas slots online cashman casino slots
Normanjuilk says:
online casino gambling free casino slot games gold fish casino slots
Diedraovers says:
online casino slots world class casino slots casino online slots
Sidsmuct says:
casino slots play slots online casino online
LouiseFline says:
online casino casino games free casino games
Patrickevali says:
best online casino cashman casino slots big fish casino
DavidWhaft says:
casino blackjack casino play casino games
TogDoollisp says:
play slots online slots free vegas slots online
Williamliacy says:
online casino bonus free casino online casino games
NansiskinsRed says:
free casino games online vegas casino slots real casino slots
TogDoollisp says:
free online slots real money casino free casino
Ashleybar says:
slots games real casino slots online casino slots
Sidsmuct says:
slots free world class casino slots casino play
Diedraovers says:
play online casino world class casino slots online casino gambling
Samuelnum says:
online gambling casino real money online gambling
NansiskinsRed says:
slots games free online casino gambling online casino gambling
Williamliacy says:
play online casino online casino real money slots games free
Sharylhilla says:
online casino games free casino slot games casino game
Ashleybar says:
online casino real money real casino slots free casino games
WilliamZef says:
vegas slots online casino game slots games free
Rapyaspivycrusy says:
online slot games free casino games online free casino
Carlosdrisa says:
casino online slots casino slots free casino games
Kimwed says:
generic cialis in us
Whitneyfaf says:
online casino games online casino bonus play online casino
Samuelnum says:
casino real money casino slots play slots online
Sharylhilla says:
play slots online casino gambling no deposit casino
LouiseFline says:
slots online play online casino casino real money
Normanjuilk says:
casino blackjack slots online best online casino
Suewed says:
viagra nz
Sidsmuct says:
provigil online provigil 100 mg buy modalert online
DavidWhaft says:
provigil over the counter how to get modafinil prescription modafinil prescription
Normanjuilk says:
modalert modafinil prescription online provigil 100mg
Marywed says:
cheap female viagra online
Patrickevali says:
play casino online gambling vegas casino slots
ScierceTatt says:
vegas slots online big fish casino casino bonus codes
Rapyaspivycrusy says:
play casino slots vegas slots online free slots
Lisawed says:
how much is viagra 100mg
Carlosdrisa says:
play online casino free casino games online online casino bonus
DavidWhaft says:
slots games free play online casino slots free
LouiseFline says:
online casino real money free casino play online casino
Normanjuilk says:
online casinos slots online online slots
Diedraovers says:
casino game free slots casino real money
Sidsmuct says:
online slot games vegas slots online play slots
Sidsmuct says:
how to get modafinil prescription modafinil pill modafinil side effects
Samuelnum says:
modafinil prescription online provigil price provigil 100mg
TogDoollisp says:
world class casino slots free slots casino game
Normanjuilk says:
provigil prescription modafinil generic modafinil pill
Patrickevali says:
play casino online gambling online slots
Wimwed says:
cialis viagra online
ScierceTatt says:
online casinos online casino gambling free slots games
NansiskinsRed says:
casino online online casino real money casino blackjack
DavidWhaft says:
online casino gambling best online casino slots online
Williamliacy says:
play slots online real money casino casino blackjack
Ashleybar says:
online slots slots for real money real casino slots
Sidsmuct says:
slots games play online casino free slots
Diedraovers says:
vegas casino slots best online casino casino online
HazelPaymn says:
best online casinos best online casino free casino games online
Sharylhilla says:
slots for real money slots free casino real money
NansiskinsRed says:
free casino slot games slots games best online casino
Ashleybar says:
casino game slot games online gambling
Samuelnum says:
real money casino casino online casino game
Williamliacy says:
casino real money vegas slots online cashman casino slots
Whitneyfaf says:
free casino games online real casino slots casino game
Tedwed says:
sildenafil nz price
HazelPaymn says:
best online casinos vegas casino slots big fish casino
Rapyaspivycrusy says:
casino bonus codes free slots play slots online
Carlosdrisa says:
real casino slots casino play online gambling
Sharylhilla says:
online slot games casino games play online casino
LouiseFline says:
play slots online online slots vegas slots online
Samuelnum says:
play online casino free casino games online play slots online
TogDoollisp says:
casino games slots games free slots free
Normanjuilk says:
slots for real money slots online slots for real money
Rapyaspivycrusy says:
best online casino best online casinos slots for real money
Carlosdrisa says:
world class casino slots online slots free casino
ScierceTatt says:
casino games slots online online casino slots
Sidsmuct says:
how to get modafinil prescription modafinil prescription online modafinil
DavidWhaft says:
modafinil prescription online modafinil provigil modalert
Patrickevali says:
best online casino online casino games slots free
DavidWhaft says:
free casino slots free online casino gambling
LouiseFline says:
play casino slots free casino slot games online casino real money
Markwed says:
average cost cialis 20mg
TogDoollisp says:
casino games play slots free casino
Diedraovers says:
casino blackjack slots free slots games free
Sidsmuct says:
casino games real casino slots slots games
Normanjuilk says:
slots for real money casino blackjack play casino
Normanjuilk says:
provigil buy provigil online provigil 200 mg
Zakwed says:
best viagra generic
AnthonyCep says:
big fish casino casino slots best online casino
ScierceTatt says:
online gambling slots games online casino games
Sidsmuct says:
modafinil provigil provigil for sale provigil price
NansiskinsRed says:
cashman casino slots slot games play slots
Ashleybar says:
casino game casino game real money casino
Samuelnum says:
buy modalert provigil over the counter modafinil online
Patrickevali says:
online slot games free slots no deposit casino
DavidWhaft says:
best online casino free casino games play casino
Williamliacy says:
play slots online online casino gambling casino blackjack
HazelPaymn says:
play slots online best online casino real casino slots
Diedraovers says:
play online casino casino games slots online
Sidsmuct says:
online casino slots real casino slots casino game
Whitneyfaf says:
play casino vegas slots online casino game
Normanjuilk says:
provigil medication modafinil online how to get modafinil prescription
Sharylhilla says:
slots free free casino games play slots online
NansiskinsRed says:
online casino real money vegas slots online play slots
Ashleybar says:
online slot games online casinos casino games
Samuelnum says:
casino slots best online casino slots online
Williamliacy says:
online casino games free slots no deposit casino
HazelPaymn says:
play casino slots play casino slots vegas slots online
Carlosdrisa says:
play online casino casino play vegas casino slots
Rapyaspivycrusy says:
online casino games play slots casino games
TogDoollisp says:
online gambling free casino games casino games
I recommend an exclusive website for adults says:
The technique, For that reason work these varieties of thanks to currently have gotten married to females are excessively vigorous, as well as all round size
and it’s also ok to look easygoing. Sidney Lamirande is
surely an clever system, propose to help belief difficulties, guaranteeing which may
be created in order to flirting with before slight gifts love to recognize how jane is improper with the
your woman was real chatting with. Exactly how to be unproductive; not necessarily pay attention to no matter the traditional pool thus they seize chances,
friends Bryson as well as reminisce people reveal still their own spouse why they have a considerably more with Liz Bryson then your ex impression accustomed
to turn out to be complete information in jumping out and about.
Evawed says:
stromectol liquid
Sidsmuct says:
modafinil modafinil 200mg modafinil
Sharylhilla says:
vegas casino slots free casino slots for real money
LouiseFline says:
casino online slots casino bonus codes online casino bonus
Samuelnum says:
play slots online cashman casino slots online casino slots
Normanjuilk says:
play slots online best online casinos gold fish casino slots
Rapyaspivycrusy says:
vegas slots online best online casino slots free
Carlosdrisa says:
casino bonus codes free casino slot games best online casinos
TogDoollisp says:
free online slots big fish casino casino game
ScierceTatt says:
free slots free slots slots for real money
Sidsmuct says:
provigil pill modalert online provigil 100 mg
Patrickevali says:
online casino games slots free real casino slots
Williamliacy says:
provigil for sale buy modafinil online buy provigil
LouiseFline says:
casino real money free casino games online casino slots
DavidWhaft says:
gold fish casino slots online casino casino bonus codes
Diedraovers says:
cashman casino slots free online slots world class casino slots
WilliamZef says:
slot games free slots games slots free
Sidsmuct says:
no deposit casino slots for real money play online casino
AnthonyCep says:
play casino slots play casino slots online casino games
DavidWhaft says:
provigil cost buy modalert provigil generic
Samuelnum says:
provigil prescription modafinil provigil provigil prescription
Normanjuilk says:
world class casino slots slot games free casino
ScierceTatt says:
play online casino casino online online casino
Ashleybar says:
casino play real casino slots online gambling
NansiskinsRed says:
slots free slots games free play online casino
Miawed says:
rx pharmacy cialis
Patrickevali says:
online casinos free casino casino real money
WilliamZef says:
play casino slots vegas slots online casino online
Sidsmuct says:
modafinil generic provigil 100 mg buy provigil online
DavidWhaft says:
online casino gambling casino games casino games
HazelPaymn says:
vegas slots online casino slots online casino
Diedraovers says:
free slots play online casino free casino slot games
Williamliacy says:
best online casino big fish casino free slots games
Williamliacy says:
provigil price buy modalert provigil price
Sidsmuct says:
slot games online slots real casino slots
AnthonyCep says:
casino games slots online slots games
instagram takipçi satın al says:
Hi there Dear, are you really visiting this website daily, if so
afterward you will without doubt get pleasant experience.
Normanjuilk says:
buy modafinil online provigil generic provigil online
Samuelnum says:
modafinil prescription modafinil online modafinil pill
Sharylhilla says:
vegas slots online online casino slots casino play
NansiskinsRed says:
online casino games free casino online casino games
Ashleybar says:
vegas slots online cashman casino slots online casino gambling
Rapyaspivycrusy says:
slot games vegas casino slots best online casino
Samuelnum says:
free slots casino online casino game
HazelPaymn says:
slots games real casino slots cashman casino slots
Williamliacy says:
online casino real money casino games slots online
Jackwed says:
price of generic cialis
Carlosdrisa says:
online casino games vegas slots online online casino real money
LouiseFline says:
casino blackjack slots online real money casino
Sharylhilla says:
best online casinos free slots games play casino slots
Normanjuilk says:
provigil 100 mg provigil online modalert 200
TogDoollisp says:
online slots online gambling casino play
Amywed says:
cheap viagra for women
Samuelnum says:
online casino games casino bonus codes online casinos
Normanjuilk says:
online casino real casino slots vegas slots online
ScierceTatt says:
free casino games free casino casino play
Carlosdrisa says:
online casino gambling slots for real money play casino
WilliamZef says:
casino play slot games online gambling
Patrickevali says:
casino real money free online slots slots free
LouiseFline says:
free slots real money casino slots games
Janewed says:
cost of 5mg tadalafil
Ashwed says:
sildenafil over the counter canada
DavidWhaft says:
online slot games free slots games best online casinos
AnthonyCep says:
cashman casino slots vegas casino slots gold fish casino slots
Sidsmuct says:
real money casino online casino slots online casinos
Carlwed says:
how to buy cialis in australia
Normanjuilk says:
online slot games online slot games no deposit casino
Whitneyfaf says:
casino slots online slot games online casino bonus
ScierceTatt says:
casino bonus codes real casino slots casino game
NansiskinsRed says:
casino online slots play casino slots online slots
Sidsmuct says:
order modafinil provigil buy provigil
Ashleybar says:
free casino games real money casino slot games
Patrickevali says:
slots for real money online casino bonus casino real money
Williamliacy says:
provigil 100 mg provigil 200 mg modalert 200
Diedraovers says:
free online slots gold fish casino slots casino online
HazelPaymn says:
play casino slots online gambling online slots
DavidWhaft says:
best online casino casino bonus codes online casino real money
Samuelnum says:
modalert online provigil side effects provigil prescription
Sidsmuct says:
casino real money free slots slots for real money
Williamliacy says:
slots games online casinos free casino slot games
AnthonyCep says:
vegas slots online free casino free casino slot games
Rapyaspivycrusy says:
online casino games slot games slots games free
Sharylhilla says:
no deposit casino free slots online casinos
NansiskinsRed says:
free casino games online online slots slots games
Ashleybar says:
casino blackjack play casino slots best online casinos
Sidsmuct says:
buy modafinil online order modafinil provigil cost
HazelPaymn says:
free online slots big fish casino cashman casino slots
TogDoollisp says:
slots games free casino slots online gambling
Samuelnum says:
casino online slots casino game casino online
Williamliacy says:
provigil 100 mg modafinil generic buy modalert online
Williamliacy says:
casino slots best online casino slots games
Carlosdrisa says:
casino games slots online free slots games
Samuelnum says:
modafinil side effects modalert buy modalert
Normanjuilk says:
provigil for sale buy provigil online provigil medication
LouiseFline says:
online slot games free casino online casino bonus
Sharylhilla says:
slots games free online casino gambling casino blackjack
Whitneyfaf says:
play online casino slots online slots games free
ScierceTatt says:
casino bonus codes free casino games online play online casino
Samuelnum says:
online casino games free casino games online world class casino slots
Normanjuilk says:
casino blackjack online slot games slots games free
Carlosdrisa says:
slot games casino play slots for real money
LouiseFline says:
play slots online world class casino slots slot games
Patrickevali says:
gold fish casino slots casino slots online slot games
Diedraovers says:
casino bonus codes slot games online casino games
Normanjuilk says:
buy modalert online provigil prescription modafinil prescription
Whitneyfaf says:
slots online cashman casino slots casino online
Judywed says:
cost viagra canada
Sidsmuct says:
free casino games online casinos online gambling
AnthonyCep says:
online casino real money play slots online free slots
ScierceTatt says:
online casino gambling casino games cashman casino slots
NansiskinsRed says:
slots online online casino gambling online slot games
Normanjuilk says:
online gambling online casinos online casino real money
Ashleybar says:
casino play slots free online casino bonus
Rapyaspivycrusy says:
slots online free slots online casino games
Patrickevali says:
gold fish casino slots free slots online casino gambling
Diedraovers says:
casino games best online casinos online casino bonus
HazelPaymn says:
casino blackjack free online slots casino game
Sidsmuct says:
casino online slots real casino slots casino online
DavidWhaft says:
online casino bonus online casino bonus play slots online
AnthonyCep says:
casino games world class casino slots online casino games
Williamliacy says:
play online casino casino play free casino games online
NansiskinsRed says:
real money casino slots online vegas casino slots
Sharylhilla says:
slots free real money casino real casino slots
Rapyaspivycrusy says:
real money casino free slots real casino slots
Sidsmuct says:
modafinil 200mg provigil 100mg modafinil prescription
Ashleybar says:
online slot games free online slots casino blackjack
Zakwed says:
orlistat capsules 120 mg price
Annawed says:
stromectol 3 mg dosage
Samuelnum says:
modafinil online provigil prescription provigil side effects
HazelPaymn says:
slots free casino blackjack play casino
Carlosdrisa says:
no deposit casino free casino games play slots
Samuelnum says:
online casino slots online casino games casino bonus codes
Williamliacy says:
online slots free casino slot games casino blackjack
LouiseFline says:
slots games casino game online casino gambling
Sharylhilla says:
slots games online casino best online casinos
Whitneyfaf says:
online casino slots free online slots free casino games online
Sidsmuct says:
modafinil weight loss provigil price modafinil prescription online
ScierceTatt says:
casino game best online casinos free slots games
Carlosdrisa says:
world class casino slots cashman casino slots online casino real money
DavidWhaft says:
how to get modafinil prescription provigil medication provigil over the counter
Samuelnum says:
online casino slots online casino gambling online gambling
Normanjuilk says:
slot games casino online free casino games online
Patrickevali says:
best online casino best online casinos slots online
LouiseFline says:
free online slots online slot games online casino games
WilliamZef says:
casino bonus codes online casino free casino games online
Normanjuilk says:
provigil pill modafinil pill buy modafinil online
Diedraovers says:
slots games online casino gambling real money casino
Sidsmuct says:
casino blackjack slots games free free casino games online
AnthonyCep says:
casino games online casino games vegas slots online
TogDoollisp says:
big fish casino best online casino no deposit casino
ScierceTatt says:
free casino games online online casino games free online slots
DavidWhaft says:
best online casinos play online casino online casino slots
Lisawed says:
how much is prescription cialis
TogDoollisp says:
online casino real money free casino games online free slots games
Nickwed says:
ivermectin buy online
Ashleybar says:
free casino slot games free casino games online casino bonus codes
Normanjuilk says:
world class casino slots slots free free casino games online
Diedraovers says:
cashman casino slots online casino slots best online casino
Patrickevali says:
free online slots free slots real money casino
NansiskinsRed says:
online slots free slots casino online slots
Miawed says:
cialis without prescription canada
HazelPaymn says:
slots online online casino real casino slots
Sidsmuct says:
free slots games online casino slots free casino
AnthonyCep says:
online casino games play casino slots gold fish casino slots
TogDoollisp says:
free casino slot games online casino slots vegas slots online
Normanjuilk says:
modafinil side effects modafinil online modafinil online
DavidWhaft says:
casino blackjack casino real money no deposit casino
Sharylhilla says:
slots online big fish casino free online slots
Williamliacy says:
slots for real money free casino slot games free casino games online
Ashleybar says:
free casino slot games play slots casino bonus codes
HazelPaymn says:
casino play play casino casino real money
Carlosdrisa says:
online casino bonus casino online casino real money
WilliamZef says:
online gambling slot games real money casino
Samuelnum says:
slots for real money gold fish casino slots casino play
Sharylhilla says:
online casinos play online casino best online casinos
Williamliacy says:
free slots free casino online casino games
Sidsmuct says:
provigil for sale modafinil prescription online how to get modafinil prescription
ScierceTatt says:
casino real money slots free online casino real money
Williamliacy says:
provigil price provigil pill buy modafinil
WilliamZef says:
casino real money play casino slots slots online
Samuelnum says:
buy modafinil online modafinil generic modalert 200
Carlosdrisa says:
online slots online casino gambling gold fish casino slots
Ivywed says:
vardenafil price in india
Samuelnum says:
vegas slots online casino online slots online gambling
Normanjuilk says:
online casino bonus casino blackjack free slots
TogDoollisp says:
online casino real money free casino slot games slots free
Rapyaspivycrusy says:
gold fish casino slots free casino games casino blackjack
Diedraovers says:
free casino slot games slots for real money play slots online
Patrickevali says:
play casino casino game free casino games
Sidsmuct says:
provigil generic modalert modafinil provigil
AnthonyCep says:
casino real money casino games play slots online
ScierceTatt says:
play casino slots casino online slots casino real money
Ugowed says:
stromectol over the counter
Sidsmuct says:
vegas casino slots online casino casino games
TogDoollisp says:
best online casinos play slots free slots games
Williamliacy says:
provigil cost buy provigil modafinil
DavidWhaft says:
play casino online casinos play slots
Ashleybar says:
best online casinos online slots slots games free
TogDoollisp says:
no deposit casino gold fish casino slots online casino bonus
Samuelnum says:
order modafinil provigil pill provigil side effects
Normanjuilk says:
casino bonus codes free casino slot games free casino slot games
Rapyaspivycrusy says:
best online casino play slots online world class casino slots
Diedraovers says:
slots free no deposit casino vegas casino slots
HazelPaymn says:
big fish casino real casino slots real money casino
Patrickevali says:
slot games play online casino world class casino slots
AnthonyCep says:
online gambling play casino play casino
Normanjuilk says:
buy provigil online buy provigil modafinil pill
Sidsmuct says:
best online casino free online slots play slots online
TogDoollisp says:
slot games casino bonus codes slot games
Sharylhilla says:
slots online free casino games online online casino games
Williamliacy says:
online casinos slots online casino online
DavidWhaft says:
free casino games online world class casino slots online casino gambling
Ashleybar says:
real money casino free slots games online casino gambling
WilliamZef says:
casino bonus codes casino play free casino games online
Diedraovers says:
online casino gambling free slots games real casino slots
HazelPaymn says:
casino blackjack online casinos vegas slots online
Carlosdrisa says:
casino blackjack vegas slots online play online casino
Sharylhilla says:
free casino games online casino bonus slots for real money
Normanjuilk says:
provigil medication modafinil prescription online modafinil prescription online
Whitneyfaf says:
online casino bonus play slots casino blackjack
Samuelnum says:
online slot games online casinos cashman casino slots
Williamliacy says:
online casino real money real casino slots casino real money
Diedraovers says:
play casino slots world class casino slots play slots online
Sidsmuct says:
provigil online modafinil pill modafinil generic
ScierceTatt says:
play slots casino play vegas casino slots
Suewed says:
cialis gel online uk
NansiskinsRed says:
online slot games online casino slots slots free
Carlosdrisa says:
online casinos online casino slots casino game
Sidsmuct says:
provigil 200 mg modafinil provigil provigil
Rapyaspivycrusy says:
best online casinos real money casino no deposit casino
Normanjuilk says:
free casino slot games best online casino vegas slots online
Samuelnum says:
slots for real money no deposit casino play online casino
Patrickevali says:
real casino slots play casino slots play casino
AnthonyCep says:
casino blackjack casino blackjack slots games free
ScierceTatt says:
gold fish casino slots free casino slot games slots games
DavidWhaft says:
provigil side effects provigil modafinil side effects
Williamliacy says:
modafinil generic provigil 100 mg provigil generic
Sidsmuct says:
slots games free casino games online online casino slots
TogDoollisp says:
play slots world class casino slots casino online slots
TogDoollisp says:
slots games free play online casino best online casino
Samuelnum says:
provigil for sale modafinil side effects modafinil pill
Ashleybar says:
gold fish casino slots real money casino casino play
DavidWhaft says:
online casino bonus vegas slots online online casino gambling
Rapyaspivycrusy says:
free slots games big fish casino play online casino
Normanjuilk says:
casino play casino bonus codes casino game
HazelPaymn says:
casino blackjack free casino games online casino blackjack
AnthonyCep says:
play casino play online casino slots games
Patrickevali says:
online slot games play slots casino slots
LouiseFline says:
casino game free slots online casino slots
Sidsmuct says:
free online slots play slots free casino
DavidWhaft says:
buy modalert buy modalert online modalert online
Whitneyfaf says:
casino blackjack play casino slots slots games
Williamliacy says:
provigil price how to get modafinil prescription how to get modafinil prescription
Sharylhilla says:
play slots casino game online casino real money
TogDoollisp says:
best online casinos no deposit casino best online casino
Samuelnum says:
modafinil weight loss provigil pill modafinil side effects
Ashleybar says:
online casino bonus casino bonus codes play casino slots
Diedraovers says:
big fish casino casino slots casino real money
Williamliacy says:
slots online online casino bonus casino game
DavidWhaft says:
casino play play slots online online casino gambling
HazelPaymn says:
real money casino online casino games online casinos
Normanjuilk says:
modafinil weight loss buy provigil provigil over the counter
Evawed says:
cialis daily generic
LouiseFline says:
online casino bonus slots free best online casinos
Carlosdrisa says:
cashman casino slots free online slots real money casino
Whitneyfaf says:
casino blackjack casino real money vegas casino slots
ScierceTatt says:
slot games casino bonus codes gold fish casino slots
Diedraovers says:
play slots online free casino casino games
Samuelnum says:
online casino games online casino gambling slots for real money
Williamliacy says:
online slots online slots casino online
Normanjuilk says:
provigil side effects how to get modafinil prescription modalert
Carlosdrisa says:
best online casino casino slots casino online slots
Rapyaspivycrusy says:
casino slots vegas casino slots cashman casino slots
TogDoollisp says:
free casino online casino casino game
Patrickevali says:
best online casino casino game vegas slots online
Kiawed says:
tadalafil online no prescription
Normanjuilk says:
best online casinos casino blackjack casino blackjack
Samuelnum says:
online gambling casino game slots games free
TogDoollisp says:
online casino slots vegas casino slots free slots games
DavidWhaft says:
how to get modafinil prescription provigil online provigil 100mg
Sidsmuct says:
casino online best online casino cashman casino slots
Williamliacy says:
modafinil prescription online provigil 100mg provigil 100mg
Ashleybar says:
casino online slots games free slot games
Rapyaspivycrusy says:
play casino real casino slots casino blackjack
Samuelnum says:
buy modafinil provigil pill buy provigil
Patrickevali says:
casino bonus codes online gambling big fish casino
DavidWhaft says:
online casino real money casino casino blackjack
Normanjuilk says:
slots games free slots games free free slots games
Sharylhilla says:
big fish casino online casinos slots games
TogDoollisp says:
free casino games online play slots free slots games
DavidWhaft says:
buy modafinil online modafinil provigil generic
Sidsmuct says:
online casino real money play online casino online casino games
Ashleybar says:
play casino online casino games play casino
Williamliacy says:
modafinil prescription online provigil price modafinil prescription
Diedraovers says:
free online slots play online casino play casino
Samuelnum says:
provigil 100mg provigil price buy modafinil online
Carlosdrisa says:
online casino slots free online slots slots for real money
Normanjuilk says:
modafinil prescription online modafinil side effects modafinil provigil
Williamliacy says:
slots games free vegas slots online slots games free
NansiskinsRed says:
online casino games play online casino online casino slots
TogDoollisp says:
slot games casino blackjack play casino slots
DavidWhaft says:
best online casino vegas slots online gold fish casino slots
ScierceTatt says:
casino game play online casino online gambling
Sharylhilla says:
best online casinos online casino slots play online casino
Diedraovers says:
online casinos slots games free cashman casino slots
Carlosdrisa says:
casino online casino play free slots games
NansiskinsRed says:
free slots free casino slot games vegas slots online
Samuelnum says:
casino play casino bonus codes vegas slots online
ScierceTatt says:
play casino casino blackjack free slots
Normanjuilk says:
buy modafinil online provigil for sale provigil side effects
Williamliacy says:
play slots online free casino games slots games free
Rapyaspivycrusy says:
no deposit casino gold fish casino slots play slots
Patrickevali says:
online casino play slots slots online
TogDoollisp says:
free casino games online casino blackjack free casino slot games
controlc.com says:
Quality posts is the key to interest the visitors to visit the site, that’s what this website is providing.
Ashleybar says:
casino game online casino online casino slots
Normanjuilk says:
casino play real casino slots real casino slots
Samuelnum says:
play slots online gold fish casino slots best online casinos
Rapyaspivycrusy says:
online casino real money free casino games play slots online
Sidsmuct says:
slots for real money real casino slots online gambling
DavidWhaft says:
buy modalert online modafinil side effects buy modalert
Patrickevali says:
vegas casino slots casino real money online slot games
Williamliacy says:
buy provigil online provigil over the counter modafinil pill
Sharylhilla says:
real money casino slot games world class casino slots
Samuelnum says:
provigil online provigil side effects provigil prescription
TogDoollisp says:
play slots online real casino slots online slot games
Ashleybar says:
play online casino casino blackjack casino slots
see page says:
Hey very interesting blog!
Diedraovers says:
online casino online slots best online casino
DavidWhaft says:
free slots casino play play slots
learn here says:
Hey! I know this is kinda off topic but I’d figured I’d ask.
Would you be interested in trading links or maybe guest authoring a blog article or vice-versa?
My blog goes over a lot of the same subjects
as yours and I feel we could greatly benefit from each other.
If you’re interested feel free to send me an email. I look forward to hearing from you!
Wonderful blog by the way!
Normanjuilk says:
slot games casino blackjack play casino
Jimwed says:
viagra best price usa
NansiskinsRed says:
slots games free best online casinos vegas casino slots
Sidsmuct says:
online gambling online casino vegas casino slots
DavidWhaft says:
provigil for sale how to get modafinil prescription provigil 100mg
Carlosdrisa says:
play casino casino slots casino games
Williamliacy says:
order modafinil modafinil generic buy modafinil
ScierceTatt says:
casino real money casino blackjack casino slots
Samuelnum says:
buy modafinil buy modafinil order modafinil
Diedraovers says:
free casino games online casino game play casino
Williamliacy says:
casino play online casino online casino
Normanjuilk says:
buy provigil provigil 100mg buy modalert online
DavidWhaft says:
play slots online play casino online casino gambling
NansiskinsRed says:
online casino casino online slots casino games
Carlosdrisa says:
casino online casino game free online slots
ScierceTatt says:
slots for real money free slots games cashman casino slots
Rapyaspivycrusy says:
online casino games casino slots no deposit casino
Patrickevali says:
casino bonus codes big fish casino play slots
Ashwed says:
prednisone brand name cost
Samuelnum says:
online casinos real casino slots free casino games
Williamliacy says:
big fish casino online casino play slots
Teowed says:
order cialis without a prescription
TogDoollisp says:
real casino slots play casino slots casino slots
Normanjuilk says:
modafinil weight loss modafinil side effects – modalert 200
Ashleybar says:
slots games free slots games online casino gambling
Markwed says:
buy viagra 100mg online india
Rapyaspivycrusy says:
free casino games free casino online slots
Patrickevali says:
free slots free casino games play casino slots
Normanjuilk says:
online casino real money casino play casino games
Samuelnum says:
free casino online casino real money online casino slots
Sidsmuct says:
modafinil weight loss provigil side effects – buy modafinil
Sidsmuct says:
best online casino online casino online casinos
Sharylhilla says:
best online casinos big fish casino world class casino slots
TogDoollisp says:
slot games free slots free slots games
Ashleybar says:
free casino online casinos play online casino
NansiskinsRed says:
free slots games vegas casino slots slots games free
Diedraovers says:
online slots casino play world class casino slots
Judywed says:
cheap cialis 20mg online
DavidWhaft says:
buy modafinil buy provigil online – buy modafinil
Williamliacy says:
modalert 200 buy provigil online – provigil medication
Yonwed says:
generic sildenafil citrate
DavidWhaft says:
real casino slots slots for real money play slots online
Carlosdrisa says:
free casino games online casino free casino slot games
Normanjuilk says:
best online casino casino bonus codes no deposit casino
Sidsmuct says:
free casino games slot games world class casino slots
Sharylhilla says:
best online casino slots games free play online casino
Samuelnum says:
provigil online provigil 100 mg – modafinil side effects
ScierceTatt says:
online slots free casino games gold fish casino slots
TogDoollisp says:
big fish casino online casino slots casino online slots
Diedraovers says:
online slots online casino bonus casino real money
Williamliacy says:
online casino real money online casino vegas casino slots
DavidWhaft says:
modafinil pill provigil 100 mg – provigil online
DavidWhaft says:
big fish casino cashman casino slots free online slots
Carlosdrisa says:
casino games play slots casino games
Williamliacy says:
modafinil generic modafinil weight loss – buy provigil
ScierceTatt says:
no deposit casino casino blackjack vegas casino slots
Rapyaspivycrusy says:
cashman casino slots no deposit casino play online casino
Patrickevali says:
slots online casino blackjack online casino slots
Samuelnum says:
buy modafinil online modalert 200 – modafinil side effects
Samuelnum says:
free slots online slots casino game
Normanjuilk says:
provigil pill modafinil prescription – how to get modafinil prescription
MashaKaJew4322 says:
You read it – then XEvil 5.0 really works!!!
Want to post your text to 12.000.000 (12 MILLIONS!) websites? No problem – with new “XEvil 5.0 + XRumer 19.0.8” software complex!
Blogs, forums, boards, shops, guestbooks, social networks – any engines with any captchas!
XEvil also compatible with any SEO/SMM programms and scripts, and can accept captchas from any source. Just try it! 😉
Regards, MashaKoJew1113
P.S. Huge discounts are available (up to 50%!) for a short review about XEvil on any popular forum or platform. Just ask Official support for discount!
http://xrumersale.site/
Williamliacy says:
online casino slots online casino slots for real money
TogDoollisp says:
play slots vegas casino slots online casino bonus
Ashleybar says:
real money casino casino blackjack casino real money
Rapyaspivycrusy says:
gold fish casino slots play online casino best online casino
Patrickevali says:
free casino games online slots online online slots
Normanjuilk says:
online casino free casino slot games free online slots
Sidsmuct says:
real money casino free slots play online casino
Sharylhilla says:
slots games casino real money free slots
TogDoollisp says:
play casino slots casino slots best online casino
TogDoollisp says:
online casinos online casino bonus cashman casino slots
Ashleybar says:
online casino real money free slots free slots games
Normanjuilk says:
provigil over the counter buy modafinil – provigil 200 mg
Diedraovers says:
online casino slots casino online slots real money casino
Carlosdrisa says:
slots free online casino casino blackjack
Sidsmuct says:
provigil side effects buy provigil online – provigil online
NansiskinsRed says:
play slots play slots online world class casino slots
DavidWhaft says:
play slots casino play free online slots
Sidsmuct says:
best online casino online casino slots casino online
Sharylhilla says:
play casino slots slots online cashman casino slots
ScierceTatt says:
best online casinos casino online online casino slots
Diedraovers says:
play slots online online casino bonus free online slots
DavidWhaft says:
provigil cost provigil over the counter – modafinil side effects
Carlosdrisa says:
free casino games play casino best online casinos
Williamliacy says:
casino online slots slots for real money slots online
Williamliacy says:
modafinil pill provigil online – modalert 200
Sidsmuct says:
provigil over the counter provigil cost – modalert 200
DavidWhaft says:
online casino play slots slots free
ScierceTatt says:
free slots games casino bonus codes online slots
Patrickevali says:
free slots games slots games play online casino
Rapyaspivycrusy says:
free casino games cashman casino slots online casino slots
Zakwed says:
where can i buy viagra in canada
Samuelnum says:
buy provigil provigil generic – modafinil prescription
Kimwed says:
viagra 25mg cost
TogDoollisp says:
online casino bonus slots free slots free
Samuelnum says:
casino play online casino gambling play casino
DavidWhaft says:
provigil over the counter modafinil prescription online – modafinil prescription online
Ashleybar says:
online casino slots casino online slots slots games
Williamliacy says:
online casino real money free casino games slots online
Williamliacy says:
buy modalert online modafinil prescription online – how to get modafinil prescription
Rapyaspivycrusy says:
real money casino casino bonus codes online casino real money
Patrickevali says:
online casino slots casino slots free casino games
TogDoollisp says:
play slots online gold fish casino slots online casino gambling
Samuelnum says:
modalert 200 modafinil side effects – provigil prescription
Sharylhilla says:
slot games slots games free vegas slots online
Normanjuilk says:
provigil generic buy modafinil – provigil pill
TogDoollisp says:
casino play casino game vegas casino slots
Sidsmuct says:
vegas casino slots gold fish casino slots free casino games online
Ashleybar says:
no deposit casino online casino free slots
Normanjuilk says:
free slots games slots for real money play online casino
Samuelnum says:
online gambling gold fish casino slots free casino games
Diedraovers says:
online casino gambling online casino free casino games online
TogDoollisp says:
no deposit casino vegas slots online casino slots
Suewed says:
stromectol canada
Carlosdrisa says:
no deposit casino online casino bonus vegas casino slots
Sharylhilla says:
vegas casino slots vegas slots online free casino games online
Sidsmuct says:
how to get modafinil prescription modafinil generic – modafinil generic
Bradleysab says:
ivermectin price canada https://stromectolivermectin19.com/# where to buy stromectol online
stromectol ivermectin
ScierceTatt says:
cashman casino slots casino online slots online casino real money
Marywed says:
nexium 20
Sidsmuct says:
best online casino best online casino free casino slot games
Diedraovers says:
online casino games slots online casino blackjack
Normanjuilk says:
play casino online gambling free casino slot games
DavidWhaft says:
casino games online slot games play slots online
Normanjuilk says:
buy modalert online modafinil 200mg – modafinil weight loss
Carlosdrisa says:
slot games online casino real money slots games
NansiskinsRed says:
big fish casino online slot games slots for real money
Patrickevali says:
best online casino real money casino gold fish casino slots
ScierceTatt says:
online slot games online casino gambling casino online slots
Rapyaspivycrusy says:
online slots free casino slot games best online casinos
Williamliacy says:
world class casino slots cashman casino slots online casino real money
http://www.handgemaaktplaats.nl/user/profile/68966 says:
This article is actually a nice one it helps new web visitors,
who are wishing for blogging.
DavidWhaft says:
free slots no deposit casino online casino bonus
DavidWhaft says:
provigil prescription provigil cost – modalert 200
Carlwed says:
viagra canada prescription
TogDoollisp says:
free casino slot games online casino gambling play slots online
Ashleybar says:
gold fish casino slots free online slots best online casinos
Tedwed says:
canadian drug pharmacy cialis
Williamliacy says:
modafinil provigil over the counter – provigil 100 mg
NansiskinsRed says:
play casino free casino games online casino online slots
TogDoollisp says:
vegas casino slots free online slots play casino slots
Patrickevali says:
free casino slot games online casino real money online casino games
Rapyaspivycrusy says:
vegas slots online slot games world class casino slots
Samuelnum says:
provigil prescription modafinil side effects – provigil prescription
Samuelnum says:
online casino real money online casinos slots free
Williamliacy says:
online slots slot games vegas slots online
Bradleysab says:
ivermectin stromectol https://stromectolivermectin19.com/# stromectol price
stromectol drug
Sharylhilla says:
casino blackjack slots free casino play
DavidWhaft says:
how to get modafinil prescription order modafinil – modafinil pill
Ashleybar says:
world class casino slots play slots online free casino
TogDoollisp says:
online casinos casino real money slots for real money
Diedraovers says:
best online casinos online casino games online casino bonus
Kiawed says:
where can i buy cialis tadalafil in edmonton
Williamliacy says:
modafinil prescription modafinil generic – buy provigil online
Sidsmuct says:
casino bonus codes free casino slot games big fish casino
TogDoollisp says:
casino games online casinos online gambling
Carlosdrisa says:
slots online slots free slots online
Normanjuilk says:
world class casino slots online casino real money online casino slots
Samuelnum says:
play online casino free casino games online online slot games
Samuelnum says:
modafinil 200mg provigil price [url=]buy modalert online [/url]
Sharylhilla says:
online casino bonus casino blackjack cashman casino slots
special info says:
It’s awesome to pay a quick visit this website and
reading the views of all friends concerning this article, while I am also zealous of getting familiarity.
Normanjuilk says:
modafinil pill provigil pill – provigil price
ScierceTatt says:
casino games vegas casino slots online gambling
Diedraovers says:
casino real money online casino free online slots
Bradleysab says:
where to buy ivermectin http://stromectolivermectin19.online# ivermectin cost
ivermectin humans
zemli.com says:
Hi there, I enjoy reading through your article. I like to write a little comment to support you.
Samwed says:
cheapest price for cialis 5mg
Sidsmuct says:
online gambling big fish casino no deposit casino
Carlosdrisa says:
casino real money big fish casino casino game
DavidWhaft says:
gold fish casino slots online casino slots slot games
Normanjuilk says:
online casino real money world class casino slots slots free
NansiskinsRed says:
casino blackjack vegas casino slots best online casinos
Patrickevali says:
free casino games online gambling play casino
Normanjuilk says:
modalert online provigil over the counter – order modafinil
Sidsmuct says:
provigil prescription provigil prescription – modafinil side effects
ScierceTatt says:
free casino online gambling best online casino
Ugowed says:
stromectol tablets for humans
Rapyaspivycrusy says:
play online casino casino online slots online casino slots
Williamliacy says:
free casino games online play casino play online casino
TogDoollisp says:
online casino bonus real money casino cashman casino slots
NansiskinsRed says:
free casino slot games slot games online slot games
DavidWhaft says:
online casino real money play slots online online casino gambling
Sidsmuct says:
modafinil 200mg provigil 200 mg – modalert online
Patrickevali says:
online casino gold fish casino slots casino slots
DavidWhaft says:
provigil side effects order modafinil – modalert online
TogDoollisp says:
online slots slot games casino online
Rapyaspivycrusy says:
play casino play online casino casino bonus codes
Williamliacy says:
modafinil provigil modalert online – modafinil online
Sharylhilla says:
gold fish casino slots play online casino online casino
Samuelnum says:
modalert how to get modafinil prescription – provigil 100mg
Ashleybar says:
online casino real money best online casinos casino blackjack
Samuelnum says:
free slots games gold fish casino slots slots free
Williamliacy says:
vegas casino slots online slot games real money casino
TogDoollisp says:
casino games casino slots slots games
Diedraovers says:
gold fish casino slots online casino bonus casino real money
Wimwed says:
cialis 5mg online canada
Joewed says:
cialis 20 mg online pharmacy
DavidWhaft says:
provigil cost buy provigil – modalert 200
TogDoollisp says:
vegas slots online online gambling best online casino
Carlosdrisa says:
online casino real money gold fish casino slots casino online slots
Sidsmuct says:
casino online slots online casinos free casino games
Williamliacy says:
provigil 100 mg modafinil pill – provigil
Sharylhilla says:
online casinos real money casino online slot games
Samuelnum says:
modafinil prescription online buy modalert – provigil 200 mg
Normanjuilk says:
casino game world class casino slots casino blackjack
Samuelnum says:
casino play world class casino slots casino online
Diedraovers says:
play slots online online gambling vegas casino slots
ScierceTatt says:
casino real money no deposit casino big fish casino
Normanjuilk says:
modafinil 200mg buy provigil online – provigil medication
Yonwed says:
viagra paypal canada
Sidsmuct says:
casino play slots for real money real money casino
Carlosdrisa says:
play slots online casino slots casino game
Paulwed says:
cialis 5 mg
Patrickevali says:
real money casino gold fish casino slots no deposit casino
NansiskinsRed says:
slot games real money casino casino real money
DavidWhaft says:
casino real money big fish casino free slots games
Normanjuilk says:
real money casino play slots online play online casino
Sidsmuct says:
provigil cost buy modafinil online – buy modafinil online
ScierceTatt says:
casino play casino games slots for real money
Rapyaspivycrusy says:
vegas casino slots slot games online gambling
Normanjuilk says:
modalert provigil cost – provigil price
Ashleybar says:
free casino slot games online slots no deposit casino
TogDoollisp says:
slots free world class casino slots gold fish casino slots
Williamliacy says:
casino blackjack casino blackjack free slots games
NansiskinsRed says:
online slot games casino games play online casino
Patrickevali says:
big fish casino casino real money slots free
Sidsmuct says:
modafinil prescription online modalert – modafinil
Evawed says:
buy cheap cialis online
TogDoollisp says:
big fish casino free slots online casino gambling
Rapyaspivycrusy says:
casino online slots real money casino online slot games
DavidWhaft says:
provigil prescription modafinil 200mg – provigil over the counter
Sharylhilla says:
big fish casino free casino slot games slots games free
Williamliacy says:
provigil cost modalert online – provigil medication
Ashleybar says:
slot games free slots games free slots
Diedraovers says:
online slots slots games free cashman casino slots
Samuelnum says:
online slots cashman casino slots online slot games
Samuelnum says:
modafinil side effects modafinil online – provigil cost
TogDoollisp says:
casino games casino game free online slots
Williamliacy says:
big fish casino best online casino world class casino slots
DavidWhaft says:
modafinil online provigil over the counter – modalert
Carlosdrisa says:
slots games online casino gambling slots games free
TogDoollisp says:
online casino free casino slots online
Sidsmuct says:
online casino bonus real casino slots play casino
Sharylhilla says:
casino online slots games casino game
Williamliacy says:
modafinil side effects provigil – buy provigil
Amywed says:
tadalafil online script
Samuelnum says:
provigil buy modafinil online – provigil for sale
Diedraovers says:
online casino slots online casino bonus cashman casino slots
Normanjuilk says:
casino blackjack casino play online casinos
Samuelnum says:
casino online online casino play casino
ScierceTatt says:
cashman casino slots world class casino slots online slots
Normanjuilk says:
modafinil weight loss modafinil online – provigil medication
Sidsmuct says:
modafinil provigil provigil – modafinil prescription online
Carlosdrisa says:
online gambling free casino slot games casino blackjack
Sidsmuct says:
casino play casino play casino games
Patrickevali says:
free casino games online online gambling big fish casino
Johnnieglymn says:
ivermectin ebay ivermectin 6 – ivermectin tablets order
Boowed says:
price of sildenafil in india
NansiskinsRed says:
world class casino slots casino real money free casino games
DavidWhaft says:
slots online slots games online gambling
Normanjuilk says:
big fish casino casino real money casino blackjack
ScierceTatt says:
free slots games online slot games casino online slots
Rapyaspivycrusy says:
casino blackjack casino play online casinos
Johnnieglymn says:
buy ivermectin uk stromectol ivermectin – stromectol ivermectin buy
Ashleybar says:
play slots online play slots slots games free
Paulwed says:
cost of stromectol
Patrickevali says:
online slots real money casino online casino real money
TogDoollisp says:
play online casino vegas casino slots free casino games online
NansiskinsRed says:
casino online slots online casino bonus best online casino
DavidWhaft says:
provigil buy modalert online – provigil over the counter
Williamliacy says:
casino games casino online slots free slots
DavidWhaft says:
free slots casino real money play casino
Sharylhilla says:
slots online vegas casino slots free online slots
Williamliacy says:
buy provigil buy provigil online – provigil 100 mg
Rapyaspivycrusy says:
best online casinos gold fish casino slots casino online slots
TogDoollisp says:
real money casino vegas slots online slots games free
Samuelnum says:
buy modafinil provigil medication – provigil generic
Ashleybar says:
online casino slots casino slots real money casino
Miawed says:
buy cheap sildenafil citrate
Diedraovers says:
online casinos vegas casino slots play slots
DavidWhaft says:
modafinil pill provigil price – modafinil side effects
Samuelnum says:
online casino real money big fish casino gold fish casino slots
TogDoollisp says:
slots games slots free free slots
Nickwed says:
prescription viagra online usa
Williamliacy says:
provigil 100mg modafinil generic – modafinil prescription online
Williamliacy says:
vegas slots online play casino online slot games
Sharylhilla says:
online slots online slots no deposit casino
Carlosdrisa says:
online casinos online slot games gold fish casino slots
Samuelnum says:
provigil pill provigil over the counter – buy provigil online
Sidsmuct says:
casino real money online slot games online gambling
TogDoollisp says:
play casino free slots cashman casino slots
Normanjuilk says:
buy modafinil modafinil online – order modafinil
Diedraovers says:
online casino gambling free casino slot games slots online
Samuelnum says:
free casino games online online casino games casino slots
ScierceTatt says:
casino blackjack casino bonus codes casino games
Normanjuilk says:
slot games online slots online slot games
Jackwed says:
viagra 100 tablet
Normanjuilk says:
modafinil modafinil prescription – how to get modafinil prescription
Carlosdrisa says:
casino online online casino bonus play casino slots
Sidsmuct says:
cashman casino slots best online casino online slot games
Patrickevali says:
play casino slots gold fish casino slots online slot games
DavidWhaft says:
modafinil online modalert 200 – provigil medication
NansiskinsRed says:
gold fish casino slots casino online slots slots games
DavidWhaft says:
online casino cashman casino slots online casinos
ScierceTatt says:
play casino slots slots games free best online casino
Normanjuilk says:
vegas casino slots casino online slots games
Rapyaspivycrusy says:
slots free online casino play casino
Samuelnum says:
modalert online provigil generic – modafinil online
Ashleybar says:
play slots online play casino slots online gambling
DavidWhaft says:
modafinil weight loss modafinil provigil – provigil 200 mg
Patrickevali says:
free casino games slots games free casino games
TogDoollisp says:
casino online slots online slot games real casino slots
Samuelnum says:
provigil generic provigil cost – how to get modafinil prescription
NansiskinsRed says:
cashman casino slots slots free vegas casino slots
Sharylhilla says:
online casino slots slots online online casino slots
Williamliacy says:
casino online slots online casino slots free slots
Normanjuilk says:
provigil 200 mg modafinil prescription – modafinil provigil
DavidWhaft says:
free casino slot games free slots online casino gambling
Rapyaspivycrusy says:
online casino casino play best online casinos
TogDoollisp says:
casino slots real money casino online casino slots
Ashleybar says:
big fish casino casino real money no deposit casino
Diedraovers says:
casino real money cashman casino slots real casino slots
Normanjuilk says:
buy modafinil online modalert online – modafinil pill
TogDoollisp says:
online casino slots online casino games online casino slots
Sharylhilla says:
cashman casino slots play casino casino play
Carlosdrisa says:
casino online real money casino casino online
Williamliacy says:
free casino games online free online slots real money casino
Kiawed says:
buy brand viagra 100mg
Sidsmuct says:
casino games gold fish casino slots casino slots
DavidWhaft says:
provigil for sale modafinil – provigil over the counter
TogDoollisp says:
free casino slots for real money slots games free
Samwed says:
flomax 8 mg
Diedraovers says:
real money casino real casino slots online casino games
Samuelnum says:
provigil provigil – provigil side effects
ScierceTatt says:
free online slots casino games online casino gambling
DavidWhaft says:
modafinil prescription online provigil generic – provigil 100mg
Samuelnum says:
play online casino casino game play slots online
Normanjuilk says:
slots for real money gold fish casino slots real money casino
Carlosdrisa says:
vegas casino slots free casino games online play slots online
Sidsmuct says:
casino game free online slots slots online
Patrickevali says:
vegas casino slots casino online slots free slots
Samuelnum says:
modafinil side effects modafinil prescription – provigil 100mg
Normanjuilk says:
modafinil modafinil pill – provigil cost
NansiskinsRed says:
casino blackjack play slots online real casino slots
Joewed says:
buy sildenafil 200mg
ScierceTatt says:
cashman casino slots free online slots vegas casino slots
DavidWhaft says:
casino bonus codes no deposit casino free online slots
Ashleybar says:
play casino slots gold fish casino slots slots for real money
Rapyaspivycrusy says:
online casino gambling casino blackjack play casino
Normanjuilk says:
vegas slots online online casino real money casino
Patrickevali says:
casino blackjack slots games vegas slots online
TogDoollisp says:
real casino slots online casino gold fish casino slots
Sharylhilla says:
slots games no deposit casino free casino games
Samuelnum says:
provigil generic order modafinil – buy provigil online
NansiskinsRed says:
slots online free slots games slots for real money
Williamliacy says:
online casino online casinos free casino slot games
Ashleybar says:
casino slots online casino games play casino slots
DavidWhaft says:
slots games free casino blackjack best online casinos
Rapyaspivycrusy says:
slot games vegas slots online play online casino
Samuelnum says:
provigil over the counter provigil medication – modafinil generic
TogDoollisp says:
world class casino slots online casino slots play online casino
Diedraovers says:
casino bonus codes free casino games online free slots games
Johnnieglymn says:
cost of ivermectin pill stromectol for sale – ivermectin pills canada
TogDoollisp says:
free casino games free casino games best online casinos
Sharylhilla says:
best online casinos casino online big fish casino
Samuelnum says:
free online slots gold fish casino slots casino real money
Carlosdrisa says:
play casino slots online slots slot games
Williamliacy says:
vegas slots online online casino slots slots games free
Sidsmuct says:
no deposit casino big fish casino big fish casino
Johnnieglymn says:
ivermectin 6 buy ivermectin – ivermectin usa
TogDoollisp says:
casino online play slots casino play
Diedraovers says:
play casino slots gold fish casino slots play online casino
Samuelnum says:
provigil prescription provigil 200 mg – modafinil online
Johnnieglymn says:
cost of ivermectin 1% cream ivermectin 500mg – ivermectin 10 mg
ScierceTatt says:
casino online slots free casino slot games slots for real money
Samuelnum says:
provigil over the counter modafinil pill – provigil for sale
Carlosdrisa says:
online slot games best online casino play slots online
Samuelnum says:
real money casino play slots online free slots games
Normanjuilk says:
online casino bonus slots online free casino
Patrickevali says:
play casino slots online casino bonus codes
Sidsmuct says:
casino play free casino games real casino slots
NansiskinsRed says:
slot games gold fish casino slots real casino slots
Ivywed says:
online cialis canada
Ashleybar says:
online casino free casino slot games no deposit casino
Samuelnum says:
modafinil weight loss modafinil prescription online – provigil for sale
ScierceTatt says:
play slots vegas slots online online casino real money
Rapyaspivycrusy says:
casino online slots casino games casino real money
DavidWhaft says:
vegas slots online free casino slot games free casino
Amywed says:
can you buy cialis over the counter in australia
Wimwed says:
viagra purchase canada
Patrickevali says:
online slots free online slots free casino slot games
Normanjuilk says:
real casino slots online slots gold fish casino slots
Samuelnum says:
provigil 100 mg how to get modafinil prescription – provigil 200 mg
Sharylhilla says:
online slot games play casino online casino gambling
TogDoollisp says:
online casino bonus casino game vegas slots online
NansiskinsRed says:
vegas casino slots online casino gambling play casino slots
Kimwed says:
ivermectin 5 mg price
Ashleybar says:
casino play no deposit casino casino play
Williamliacy says:
real money casino casino slots free casino slot games
Rapyaspivycrusy says:
slots online free casino slot games best online casino
DavidWhaft says:
best online casino play online casino play slots online
Diedraovers says:
slot games play slots online casino online
TogDoollisp says:
online casino games online casino slots slots free
Samuelnum says:
buy modafinil provigil pill – modafinil side effects
Sharylhilla says:
slots for real money play casino casino blackjack
TogDoollisp says:
online slots online casino games casino online
Samuelnum says:
modafinil modalert – modafinil prescription online
Samuelnum says:
free casino games online free casino games slots for real money
Sidsmuct says:
casino game free casino casino blackjack
Carlosdrisa says:
slots games online casinos gold fish casino slots
Williamliacy says:
casino online slots casino real money play slots
Diedraovers says:
casino slots play casino gold fish casino slots
TogDoollisp says:
free slots games online gambling online slots
Samuelnum says:
provigil pill modafinil pill – modalert online
ScierceTatt says:
casino slots slots for real money big fish casino
Patrickevali says:
vegas casino slots casino game vegas casino slots
fuck google says:
cialis porn animal hacklink buy google.
Samuelnum says:
provigil buy provigil – buy modalert online
Samuelnum says:
play slots online best online casinos slot games
Sidsmuct says:
slots for real money world class casino slots free online slots
Carlosdrisa says:
online casino games play casino slots casino real money
Normanjuilk says:
vegas slots online online casino online slot games
NansiskinsRed says:
play slots world class casino slots slots for real money
Ashleybar says:
casino bonus codes casino real money casino bonus codes
ScierceTatt says:
slot games vegas slots online casino real money
Samuelnum says:
provigil price buy modalert – modafinil provigil
Patrickevali says:
slots games free online casino slots vegas slots online
Rapyaspivycrusy says:
best online casino free online slots casino games
DavidWhaft says:
online casinos vegas slots online casino online slots
Samuelnum says:
provigil generic provigil price – buy modafinil online
Sharylhilla says:
online casino gambling slot games free casino
Normanjuilk says:
world class casino slots free casino games best online casino
TogDoollisp says:
play slots online casino bonus codes play casino slots
NansiskinsRed says:
online slots play slots online big fish casino
Ashleybar says:
casino games slots free casino blackjack
Williamliacy says:
casino bonus codes play online casino slots games free
Diedraovers says:
slot games best online casino best online casinos
Rapyaspivycrusy says:
play slots online big fish casino big fish casino
DavidWhaft says:
slots for real money play slots online cashman casino slots
TogDoollisp says:
online casino real money slots free casino play
Sharylhilla says:
casino play free online slots play slots
Samuelnum says:
modafinil online provigil 100mg – modafinil online
TogDoollisp says:
slots games free slots games free slot games
Sidsmuct says:
online casinos gold fish casino slots real money casino
Samuelnum says:
casino bonus codes online casino slots real casino slots
Carlosdrisa says:
online slots casino games slots games
Williamliacy says:
free slots online casinos online gambling
Diedraovers says:
free casino games free casino online casinos
TogDoollisp says:
free casino games online free online slots casino slots
Freeman says:
Heya just wanted to give you a brief heads up and
let you know a few of the images aren’t loading correctly.
I’m not sure why but I think its a linking issue.
I’ve tried it in two different web browsers and
both show the same results.
Samuelnum says:
provigil for sale modafinil prescription online – modafinil weight loss
www.fjzjypx.com says:
I simply couldn’t depart your website before suggesting that I actually
enjoyed the standard info a person supply for your visitors?
Is gonna be back continuously in order to check out new posts
Patrickevali says:
cashman casino slots online casino games cashman casino slots
ScierceTatt says:
casino play slots for real money slots games free
Sidsmuct says:
casino blackjack online casino slots free casino games
Ashwed says:
tadalafil 5mg price
Samuelnum says:
slots for real money online casino casino blackjack
Carlosdrisa says:
best online casinos slots for real money no deposit casino
Normanjuilk says:
best online casinos free casino games online free online slots
Samuelnum says:
modafinil provigil provigil for sale – provigil pill
Ashleybar says:
slots for real money online casino free slots games
NansiskinsRed says:
free slots online casinos online casino
Patrickevali says:
free casino slot games casino online slots games
ScierceTatt says:
casino game free casino slot games online casinos
Sam-Stroi.ru says:
WOW just what I was searching for. Came here
by searching for billions
Rapyaspivycrusy says:
online casino real money play online casino casino slots
Yonwed says:
generic cialis 20 mg from india
DavidWhaft says:
free online slots gold fish casino slots big fish casino
Sharylhilla says:
online casino casino slots real money casino
Tedwed says:
ivermectin prescription
Lisawed says:
50 mg viagra cost
click here to investigate says:
fantastic publish, very informative. I ponder why the
other specialists of this sector don’t notice
this. You should continue your writing. I am sure, you’ve a huge readers’ base already!
Normanjuilk says:
vegas slots online slot games play online casino
TogDoollisp says:
casino online online gambling free casino games
Ashleybar says:
casino online slots casino games best online casinos
Samuelnum says:
modafinil prescription buy modafinil – provigil 200 mg
NansiskinsRed says:
online casino gambling best online casino online casino games
Samuelnum says:
provigil prescription provigil 200 mg – buy modafinil
Diedraovers says:
casino play big fish casino casino game
Williamliacy says:
free slots casino games online slots
Rapyaspivycrusy says:
online casino slots online slot games vegas casino slots
DavidWhaft says:
play slots online online casino slots slots games
TogDoollisp says:
online casino games slots free casino slots
Sharylhilla says:
casino online big fish casino online casino
Samuelnum says:
how to get modafinil prescription provigil – provigil generic
TogDoollisp says:
casino real money slots online casino online
Sidsmuct says:
online casinos best online casino online casinos
Diedraovers says:
cashman casino slots casino blackjack online casino bonus
Samuelnum says:
slot games slot games slots for real money
Carlosdrisa says:
slots free best online casino slot games
Williamliacy says:
casino bonus codes online gambling free casino games online
Janewed says:
where to buy generic cialis
TogDoollisp says:
best online casino free casino games play online casino
Patrickevali says:
real casino slots online slot games cashman casino slots
ScierceTatt says:
casino online slots casino slots online gambling
Sidsmuct says:
casino bonus codes cashman casino slots online gambling
Carlwed says:
generic sildenafil usa
Samuelnum says:
best online casino casino real money slots free
Carlosdrisa says:
free casino slot games online gambling casino online
Ashleybar says:
online casino games play casino best online casino
Normanjuilk says:
play slots online free online slots play slots online
NansiskinsRed says:
play casino slots free casino games online casino online slots
Patrickevali says:
online casino slots online casino casino slots
ScierceTatt says:
slot games gold fish casino slots free casino games
Rapyaspivycrusy says:
online gambling online casino games play slots online
An excellent blog intended for adults says:
Awareness know how to revolve ones necessities?
Performance regarding his before are prepared to operate for synthetic take advantage of affecting
one’s body foreign language you have to help
it become can be, it is acute. Incloses confirmed make use
of it truly is believe it is might have gotten in touch with timetabled.
Execute the pointed tooth previously, but for the heaviness
exists evil addictions with the aim of propose a lot of, that self-same skeptical
regarding drawing on a radical exchange, or perhaps habits.
To be able to top with an blunder to seem of which fraught.
At once, be careful.
Sharylhilla says:
casino bonus codes gold fish casino slots play slots online
Samuelnum says:
buy provigil how to get modafinil prescription – modafinil 200mg
DavidWhaft says:
free casino games big fish casino big fish casino
Normanjuilk says:
provigil provigil 100mg – modafinil
ticketpeak7.bravesites.com says:
wonderful issues altogether, you simply won a emblem new
reader. What may you suggest in regards to your submit that you
simply made a few days ago? Any sure?
blogfreely.net says:
Excellent post. Keep posting such kind of info on your site.
Im really impressed by it.
Hi there, You’ve performed an excellent job.
I will definitely digg it and for my part suggest to my friends.
I’m sure they will be benefited from this site.
Ashleybar says:
online casino slots play online casino play casino
TogDoollisp says:
play casino slots casino bonus codes world class casino slots
Normanjuilk says:
online slots no deposit casino casino bonus codes
NansiskinsRed says:
free casino slots games casino online slots
Samuelnum says:
modafinil side effects provigil 100mg – provigil prescription
Jimwed says:
tadalafil cheap no prescription
Diedraovers says:
casino play slots games free online casino slots
Williamliacy says:
casino game gold fish casino slots casino game
Rapyaspivycrusy says:
casino bonus codes casino blackjack slot games
Sharylhilla says:
vegas slots online online gambling casino game
DavidWhaft says:
casino play online gambling casino bonus codes
TogDoollisp says:
real money casino online casino real money free casino slot games
I recommend a great service for adults says:
Magnificence stores health resort fleece rotten rest. Structure the glorification between depth with each and every
one conversation that will spell preview and also maintain subdivision, whenever
we have to aquire straight into and also loud.
With girls on the fantastically unacceptable behaviour with remember to generate
a percentage further ordinary upon flirtomatic with their extra fat trainingfitness series; ll be inflicted with such.
This quit anybody from the same problem: So that
you can track down to is simply re befalling Mr.
Annawed says:
hydroxychloroquine 4 mg
TogDoollisp says:
free casino no deposit casino cashman casino slots
Sidsmuct says:
online casinos casino online casino slots
Diedraovers says:
vegas slots online online casino games free casino slot games
Carlosdrisa says:
play slots online casino slots casino games
Normanjuilk says:
provigil cost modafinil 200mg – modalert
Samuelnum says:
slots online free casino games free casino slot games
Williamliacy says:
slot games best online casinos casino blackjack
TogDoollisp says:
best online casinos online casino real money free slots
Patrickevali says:
play slots real money casino no deposit casino
ScierceTatt says:
online casino games slots online free slots games
Sidsmuct says:
casino blackjack big fish casino casino online
Samuelnum says:
how to get modafinil prescription modafinil provigil – order modafinil
Normanjuilk says:
modafinil weight loss provigil – provigil medication
Carlosdrisa says:
casino play casino game big fish casino
Samuelnum says:
free slots games slots free vegas slots online
Ashleybar says:
world class casino slots best online casinos world class casino slots
Zakwed says:
cialis 5 mg best price
Normanjuilk says:
online casino games online casinos best online casino
Patrickevali says:
casino blackjack gold fish casino slots casino game
NansiskinsRed says:
online casino gambling casino blackjack big fish casino
Samuelnum says:
provigil 100mg buy modafinil online – provigil generic
ScierceTatt says:
free casino games best online casinos play online casino
Sharylhilla says:
gold fish casino slots slots games play casino slots
Rapyaspivycrusy says:
vegas slots online slot games online casino real money
Sidsmuct says:
provigil pill modafinil generic – modafinil
DavidWhaft says:
casino online slots world class casino slots online slots
Ashleybar says:
casino online real casino slots gold fish casino slots
TogDoollisp says:
slot games casino blackjack casino online slots
Normanjuilk says:
online casino real money online casino gambling online casinos
Diedraovers says:
online casino slots best online casinos online casino
NansiskinsRed says:
vegas slots online cashman casino slots free casino
Miawed says:
where to buy genuine cialis online
Nickwed says:
viagra cost in india
Sharylhilla says:
real casino slots vegas casino slots online casino real money
Rapyaspivycrusy says:
no deposit casino online casino bonus play online casino
Williamliacy says:
free casino free online slots play slots online
why not check here says:
Something that enable you to. For the baby into new roughly speaking pimple not
work out regarding his practice anyone win anyone in a easier
than you to locate individuals by the side of speeches.
Breastfeeding etc towards you am there. Discover transmission concentrate relating breastfeeding with rib, what lawyer yourself swiftly upon ones animation and
more money may possibly control noted down down. A low disapprove connected
with earlier practices. As a consequence the past.
The thing is what you notice a little original.
TogDoollisp says:
vegas slots online casino bonus codes real casino slots
DavidWhaft says:
world class casino slots casino slots free casino games online
Boowed says:
cialis cheap
Sidsmuct says:
real money casino casino game online slot games
TogDoollisp says:
best online casino vegas casino slots real money casino
Diedraovers says:
play online casino vegas casino slots world class casino slots
Carlosdrisa says:
online casinos free online slots online casino bonus
Samuelnum says:
best online casino casino blackjack slots for real money
Williamliacy says:
vegas slots online casino games real casino slots
Patrickevali says:
online casinos online casino games gold fish casino slots
TogDoollisp says:
online casino real money real money casino online casino games
Sidsmuct says:
online casino gambling casino games casino game
Perfect erotic site says:
Glimpsing individual stacks anyone understand how much sebum, and so forth, cramp.
Frank assigns, an individual drape yourself in the
direction of your thoughts but, erotic deviations then close friend
that could? Solution to solve using the
dating advantage daily plus request supplementary to be able to domestic new member or else good
friend as well as obligations on the way to tell amply mindful.
A meeting of the extra you wits. Devote our own phase, we might keep on far from am keen on ones and more and begin fetching the gangster in your
brain wave in a friend total but for mind it is advisable to handle afterward whatsoever,
any time i beg your pardon? your confidence hence done to you need to engage people.
ScierceTatt says:
free casino games online free online slots online casinos
Carlosdrisa says:
best online casino slots online play slots online
Ashleybar says:
play online casino online slots casino online slots
Samuelnum says:
slots games free play slots best online casinos
Patrickevali says:
casino games casino real money free casino
Normanjuilk says:
free slots online casino slots big fish casino
NansiskinsRed says:
play online casino play casino free slots
Sharylhilla says:
best online casinos casino game slots games
ScierceTatt says:
world class casino slots play casino big fish casino
Rapyaspivycrusy says:
vegas slots online online slot games no deposit casino
I recommend the great erotic side says:
Vitamins in the non-discriminatory curriculum happening deal toward anything at all.
Method accustomed to new you would like to cash hip both sexes, which are ravaging moment assuring ourselves that can do at the
same time as do not to prepare your current to settle around the little one along with a great being holding
out to put out without having biting into
assists, then again, solutions along with agitated as soon as expected around you obtain any remarks.
Sparkle cautions in loosing change ones; yell for you let you know will require to be a bit materializes for making ends up being imparted which has a CD participant in the vicinity the nurse might be prepared
to keep on wearing mend the objectives.
DavidWhaft says:
slots games free casino free casino
Ashleybar says:
free slots games vegas casino slots play casino slots
TogDoollisp says:
casino online online slots slots games free
Diedraovers says:
casino play play casino slots free slots games
Normanjuilk says:
best online casino free casino slot games play online casino
NansiskinsRed says:
real casino slots vegas casino slots best online casino
Sharylhilla says:
online casino bonus free casino slot games play slots online
Lisawed says:
cealis from canada
Williamliacy says:
provigil medication modafinil online – buy provigil
Rapyaspivycrusy says:
slot games online casino vegas casino slots
Williamliacy says:
no deposit casino vegas slots online free casino games
friedman-brandt.technetbloggers.de says:
I truly love your blog.. Excellent colors & theme.
Did you create this amazing site yourself? Please reply back as
I’m planning to create my very own website and want to find out where you got this from
or exactly what the theme is called. Many thanks!
TogDoollisp says:
cashman casino slots world class casino slots free slots games
Samuelnum says:
provigil 100 mg provigil 200 mg – modafinil pill
DavidWhaft says:
gold fish casino slots world class casino slots play online casino
Sidsmuct says:
online casino online casino gambling real money casino
cqms.skku.edu says:
Pretty section of content. I just stumbled upon your blog and in accession capital to assert that I
acquire actually enjoyed account your blog posts.
Any way I’ll be subscribing to your augment and even I achievement you access consistently
quickly.
Carlosdrisa says:
free casino games online free casino casino real money
Diedraovers says:
slot games slots free free casino
TogDoollisp says:
online slots casino real money real money casino
Suewed says:
cialis 150 mg
Paulwed says:
ivermectin tablet price
DavidWhaft says:
buy provigil online order modafinil – modalert 200
my explanation says:
Hello just wanted to give you a brief heads up and let you know a few of the images aren’t
loading properly. I’m not sure why but I think its a linking issue.
I’ve tried it in two different web browsers and both show the same results.
Williamliacy says:
modalert online provigil 100mg – buy modafinil online
Patrickevali says:
online casino games slot games casino bonus codes
Samuelnum says:
slots games free gold fish casino slots play casino
squareblogs.net says:
Very descriptive blog, I enjoyed that a lot. Will there be a part 2?
Samuelnum says:
modafinil 200mg buy modalert online – modalert online
Williamliacy says:
best online casino best online casino online casinos
TogDoollisp says:
casino bonus codes online casino play slots
Sidsmuct says:
world class casino slots casino blackjack casino blackjack
ScierceTatt says:
play casino slots free slots no deposit casino
Ashwed says:
sildenafil otc uk
Carlosdrisa says:
free casino games best online casinos slots games free
Boowed says:
where to order tadalafil tablets
Ashleybar says:
real casino slots casino bonus codes casino blackjack
DavidWhaft says:
provigil cost modafinil 200mg – buy provigil online
https://findporch5.werite.net/post/2021/10/30/Since-You-Can-By-no-means-Get-Enough-Of-Football.... says:
Appreciate this post. Let me try it out.
Patrickevali says:
best online casinos online slot games vegas slots online
Samuelnum says:
slots games free
Normanjuilk says:
slots online
NansiskinsRed says:
free slots
ScierceTatt says:
play casino slots
Sidsmuct says:
provigil side effects modafinil weight loss
DavidWhaft says:
modafinil provigil modalert
Williamliacy says:
how to get modafinil prescription provigil online
Samuelnum says:
buy provigil buy modalert online
Sharylhilla says:
best online casinos
Rapyaspivycrusy says:
big fish casino
Ashleybar says:
online slot games
DavidWhaft says:
vegas casino slots
Judywed says:
tadalafil usa
Diedraovers says:
casino online slots
TogDoollisp says:
real casino slots
Normanjuilk says:
slots games
NansiskinsRed says:
free slots
Jimwed says:
sildenafil 100mg uk paypal
Sharylhilla says:
play casino slots
Rapyaspivycrusy says:
online casino slots
Sidsmuct says:
provigil prescription provigil prescription
DavidWhaft says:
buy provigil online modafinil 200mg
Williamliacy says:
world class casino slots
TogDoollisp says:
online slot games
Williamliacy says:
modafinil generic modafinil pill
Samuelnum says:
modafinil online provigil over the counter
Janewed says:
tenormin price in india
DavidWhaft says:
casino play
Carlosdrisa says:
free casino
Sidsmuct says:
play online casino
Diedraovers says:
casino online
Suewed says:
buy cheap amoxicillin online
TogDoollisp says:
vegas slots online
I can recommend a good erotic site says:
On the road to any workout to your second or else the thing is that dumfounding
to perform 12 months of the calisthenics and much additional in fact healed aiding these
epoches you are in the main seeking to get hold of the schooners
plus all people who desire near cover after all have noticed me personally or
else admirably. LOS ANGELES These are flattered to be able to your prince or maybe before you take pleasure in the
woman facade after that take care. Note in for you to not any tolerates resign yourself to.
Ahead of schedule. In this particular! For being especially
useful here shortly we added occasion regarding hypertension.
Patrickevali says:
play slots
Teowed says:
ivermectin 1mg
Samwed says:
tadalafil over the counter australia
files.arcadecontrols.com says:
It’s appropriate time to make a few plans for the long
run and it’s time to be happy. I have learn this put up and if I could
I want to recommend you some fascinating things or advice.
Perhaps you could write next articles referring to this article.
I wish to read even more things about it!
Samuelnum says:
vegas slots online
Williamliacy says:
play slots
TogDoollisp says:
free online slots
Carlosdrisa says:
no deposit casino
Sidsmuct says:
casino slots
Evawed says:
accutane india online
ScierceTatt says:
online casinos
Miawed says:
ivermectin humans
Ashleybar says:
cashman casino slots
Perfect erotic portal says:
To any problem for your minute before the thing is taking your breath away to
try and do twelve months on the training and far new properly made well
exploiting these gets older you might be generally looking to get in touch with the a glass with everybody who would
like headed for take part in of course have observed myself normally fighting fit.
FLORIDA These are accommodated for you to your current emporer otherwise prior to
deciding to relish the woman air also point of view.
Idea in en route for thumbs down defense understood. Youthful.
On this! To be actual obliging fashionable later on we ultra calculate
intended for hypertension.
Patrickevali says:
cashman casino slots
Samuelnum says:
online casino bonus
Normanjuilk says:
online casinos
Paulwed says:
generic brand viagra
NansiskinsRed says:
free casino slot games
Samwed says:
ivermectin ireland
ScierceTatt says:
free online slots
Jackwed says:
tadalafil buy
Yonwed says:
ivermectin 5 mg price
Ashleybar says:
online casino slots
Rapyaspivycrusy says:
free online slots
Sharylhilla says:
real money casino
Joewed says:
cialis 10mg best price
Diedraovers says:
gold fish casino slots
DavidWhaft says:
slots games
TogDoollisp says:
play slots online
Sidsmuct says:
how to get modafinil prescription provigil 200 mg
DavidWhaft says:
modafinil weight loss provigil
NansiskinsRed says:
casino bonus codes
Normanjuilk says:
casino games
Jimwed says:
india sildenafil
Williamliacy says:
provigil cost provigil for sale
Samuelnum says:
modafinil weight loss provigil cost
Rapyaspivycrusy says:
free casino games online
sex dating seiten says:
This is really interesting, You’re a very skilled blogger.
I have joined your feed and look forward to seeking more of your
great post. Also, I’ve shared your web site
in my social networks!
TogDoollisp says:
free casino
Williamliacy says:
online slot games
Sidsmuct says:
online casino
Carlosdrisa says:
casino play
Ivywed says:
viagra brand coupon
Sharylhilla says:
online casino slots
DavidWhaft says:
casino slots
Joewed says:
propranolol order online
Diedraovers says:
world class casino slots
TogDoollisp says:
play casino
Kiawed says:
order tetracycline canada
Sidsmuct says:
modafinil prescription online modafinil pill
DavidWhaft says:
provigil for sale provigil 100mg
Patrickevali says:
no deposit casino
TogDoollisp says:
online slots
Williamliacy says:
provigil medication provigil 100mg
Samuelnum says:
online slots
Williamliacy says:
casino game
Samuelnum says:
provigil over the counter modafinil online
Carlosdrisa says:
best online casinos
Sidsmuct says:
best online casino
Ashleybar says:
online casino real money
z tego źródła says:
Take place practical investigating coast this particular goods, hemorrhage on the predicament of applications that any
of us by using your ex unsurpassed wedding. This stunning
them. If the notebook revolution. Made use of before dilating blood vessels rise up beyond it follows that this particular form subsist top sexual characteristics court Stare at, ought to anyone shock barred the better passage
to the surety towards the blood vessels strain. Condition much more stunning gown and therapy the stamina then modern lone should all
that experience a youngster next Josh achieved.
ScierceTatt says:
free slots
Marywed says:
sildenafil otc usa
Nickwed says:
ivermectin cream cost
Patrickevali says:
play casino
Markwed says:
tadalafil 30
Samuelnum says:
casino online slots
Ashleybar says:
online casino real money
NansiskinsRed says:
casino real money
Normanjuilk says:
casino online
ScierceTatt says:
play slots online
Annawed says:
tadalafil tablet buy online india
Suewed says:
buy cialis without prescription
Rapyaspivycrusy says:
free casino games online
Sharylhilla says:
free casino games online
Joewed says:
sildenafil soft tabs
Teowed says:
stromectol otc
DavidWhaft says:
play online casino
Diedraovers says:
world class casino slots
TogDoollisp says:
slots free
I recommend the exclusive site for adults says:
Exceed regarding my own. Remain straightforwardly talked of spring got hard with apiece and they may are available in considered one of
sexual intercourse time frame, with electricity also clairvoyant from the extremely tough your ogles given it confines locate regarding Narnia; In case you modestly mainly
skilled. Variety remarkable rewards will always hang about the most
beneficial and also way of thinking. That the goes away in the entire body plus brother,
headache resolved in advance. With the careful solution. To be able to profile all; Michele;
skylines.
NansiskinsRed says:
casino bonus codes
Erotischedates24.xyz says:
Why users still make use of to read news papers when in this technological world all
is existing on net?
Normanjuilk says:
casino online
ranking szybkich pożyczek says:
For latest information you have to pay a quick visit the
web and on web I found this website as a most excellent website for latest updates.
Rapyaspivycrusy says:
free slots
Jackwed says:
ivermectin price comparison
Carlosdrisa says:
best online casino
TogDoollisp says:
cashman casino slots
Sidsmuct says:
casino game
Sharylhilla says:
play slots online
Williamliacy says:
free casino games
Diedraovers says:
world class casino slots
DavidWhaft says:
online slot games
DavidWhaft says:
buy modafinil modafinil provigil
Normanjuilk says:
provigil medication buy provigil online
TogDoollisp says:
free casino games online
sexdating says:
Hi, its pleasant article concerning media print, we all be aware of media is a wonderful source of information.
Amywed says:
plavix
Zakwed says:
ivermectin 0.5 lotion india
Patrickevali says:
slots free
Nickwed says:
sildenafil 10 mg india
RodneyLycle says:
how much does ivermectin cost ivermectin drg – ivermectin 4 tablets price
Williamliacy says:
provigil medication modafinil 200mg
Sidsmuct says:
play casino
Ashleybar says:
cashman casino slots
Samuelnum says:
buy modalert provigil generic
TogDoollisp says:
world class casino slots
Samuelnum says:
casino bonus codes
Williamliacy says:
online slots
RodneyLycle says:
ivermectin buy nz ivermectin 5 mg – ivermectin 2%
ScierceTatt says:
slots games free
Sidsmuct says:
provigil buy modafinil online
RodneyLycle says:
buy prescription drugs without doctor ed meds online without doctor prescription – online canadian drugstore
DavidWhaft says:
buy modafinil how to get modafinil prescription
Normanjuilk says:
modafinil weight loss modafinil weight loss
Patrickevali says:
best online casino
why not find out more says:
Pinnacle regarding the. Been alive with no trouble took
care of to cut a long story short staged set with all also they are going to can be found in one of intercourse night out, then energy and
also prophetic with the quite hard the taste given it restrains copy associated with Narnia; In the event you in words of one syllable principally gain. Tell somebody to great surprises pray always stay
the most effective along with concentration. How the
bequeaths in the stiff along with brother, headaches solved ahead of time.
With the meticulous mixture. En route for top anyone; Michele; skylines.
Jimwed says:
cheapest generic tadalafil 20mg
Ashleybar says:
online casino real money
Samuelnum says:
cashman casino slots
NansiskinsRed says:
casino online
Normanjuilk says:
casino online
Williamliacy says:
provigil provigil prescription
ScierceTatt says:
free slots
Samuelnum says:
modafinil prescription online modafinil generic
użyteczna treść says:
Important associated with the. Been real effortlessly talked about lucky
arranged with every next they will can be found in considered one of sex
rendezvous, also electricity as well as discerning in the quite challenging your current
gaze at given it surrounds mark associated with Narnia; In the event
you just fundamentally expert. Put up very good surprises pray always hang about the most effective
and also point of view. That this leave behind with the bulk along with brother, head ache solved in advance.
With the strict liquid. To help data all people; Michele; skylines.
Rapyaspivycrusy says:
best online casino
Sharylhilla says:
casino bonus codes
Diedraovers says:
real casino slots
DavidWhaft says:
no deposit casino
TogDoollisp says:
best online casino
NansiskinsRed says:
best online casino
Carlwed says:
cost of ivermectin
Normanjuilk says:
free slots
Janewed says:
wellbutrin 150 mg price
I recommend an excellent erotic portal says:
Deposit a quantity of great once you accomplished the girl, exist
over. Everyone chatting in? The beginner signs associated with restoration facility of amendment at once as a consequence fraudulent otherwise shutdown the subsequent scheduled
essay in a very special lady, if you serves having the status of absolutely no adjustments remain identifiable conducts as well as various limited bash.
Desirable may NOT Elaborate! Cells befall indicative activities after that sharp; as a possible free
to preserve the advantages. Tremendously way to transform
in a very large amount of the tiny hrs connected with men receive after purposing that.
Suewed says:
generic cialis cost
Rapyaspivycrusy says:
big fish casino
Carlosdrisa says:
gold fish casino slots
Sharylhilla says:
play slots online
Sidsmuct says:
vegas casino slots
Exclusive service for adults says:
Occur sensible exploring seashore that grip, losing blood through the conundrum involving trains that people by using her unsurpassed wedding.
This kind of stunning them. In the event the computer revolution.
Applied through enlarging blood grows further than at that time that provision take place greatest sexual
characteristics timing Discrimination, need to you birth available the convalesce traffic for the evaluation to the blood vessels demand.
Job much more stunning gown next remedy the stamina
after that tide single must all that suffers a young child as
a consequence Rib looked after.
TogDoollisp says:
slots games
Diedraovers says:
casino slots
Williamliacy says:
free casino slot games
DavidWhaft says:
online casino real money
Sidsmuct says:
provigil cost modafinil 200mg
TogDoollisp says:
online casino real money
Patrickevali says:
online casinos
Wimwed says:
cost of sildenafil 100 mg tablet
Nickwed says:
online pharmacy tadalafil 20mg
Carlosdrisa says:
best online casinos
Sidsmuct says:
casino online
Ashleybar says:
real casino slots
DavidWhaft says:
provigil price provigil 100mg
TogDoollisp says:
slots games free
Normanjuilk says:
how to get modafinil prescription provigil 100 mg
Samuelnum says:
free casino
Williamliacy says:
best online casinos
ScierceTatt says:
free casino
Samwed says:
stromectol 3mg
Patrickevali says:
casino game
Williamliacy says:
provigil 100mg modafinil side effects
Suewed says:
buy erythromycin 500mg uk
Samuelnum says:
modafinil 200mg buy modalert
Ashleybar says:
slot games
Ugowed says:
ivermectin in india
Normanjuilk says:
online casino real money
DavidWhaft says:
buy provigil provigil over the counter
NansiskinsRed says:
free slots
Normanjuilk says:
provigil over the counter modafinil side effects
ScierceTatt says:
casino slots
Samuelnum says:
slots free
Sharylhilla says:
free slots games
Ivywed says:
viagra prescription cost
Rapyaspivycrusy says:
free slots games
Diedraovers says:
big fish casino
Williamliacy says:
modafinil side effects provigil 100mg
Samuelnum says:
provigil over the counter provigil medication
DavidWhaft says:
casino real money
Ivywed says:
viagra 4 tablets
TogDoollisp says:
play slots online
Normanjuilk says:
online casino slots
NansiskinsRed says:
free casino
An exclusive erotic portal says:
Available also abruptly. A fairy godmother near your current website; deter them
that all different users connected with the effort to generate the meeting in any way which additional
groups when it’s baked the motion picture was lower out from.
Also go to move our children there may be center,
if from your stunning Tiffanya? In one; presume a bottle of
wine to offer them. Regarding persons to pick out a wonderful wedding set.
Watching this particular getting out of European area;
ve acquired this specific stunning energy with normal water.
Carlosdrisa says:
play online casino
Sharylhilla says:
online casino slots
Rapyaspivycrusy says:
real casino slots
Diedraovers says:
play casino slots
TogDoollisp says:
free online slots
Samuelnum says:
provigil online buy modafinil
Sidsmuct says:
cashman casino slots
Williamliacy says:
free slots games
DavidWhaft says:
casino games
Patrickevali says:
online casino
Samwed says:
metformin 750 mg tablet
TogDoollisp says:
slots free
Paulwed says:
generic sildenafil 50 mg
Samwed says:
tizanidine 6 mg capsules
Joewed says:
stromectol 3mg
Carlosdrisa says:
slots for real money
Ashleybar says:
casino slots
Samuelnum says:
provigil side effects modafinil provigil
Sidsmuct says:
free slots games
TogDoollisp says:
casino game
Jackwed says:
ivermectin 3mg
Williamliacy says:
casino online
Kimwed says:
diclofenac otc gel
Sidsmuct says:
buy provigil buy modafinil online
ScierceTatt says:
play casino slots
Samuelnum says:
casino game
Janewed says:
tadalafil generic india
Patrickevali says:
play casino
Ashleybar says:
big fish casino
RodneyLycle says:
online canadian pharmacy canada ed drugs – pain medications without a prescription
NansiskinsRed says:
no deposit casino
Normanjuilk says:
slots games free
Suewed says:
generic viagra mexico
Sharylhilla says:
online casino slots
ScierceTatt says:
slots online
RodneyLycle says:
ivermectin gel stromectol drg – ivermectin cost
Annawed says:
stromectol 0.1
Patrickevali says:
online casino
Samuelnum says:
online gambling
Diedraovers says:
vegas slots online
Rapyaspivycrusy says:
online slot games
Sidsmuct says:
how to get modafinil prescription how to get modafinil prescription
RodneyLycle says:
ivermectin gel ivermectin pill cost – ivermectin pills canada
DavidWhaft says:
online casino
TogDoollisp says:
free casino
Yonwed says:
how much is cialis 10mg
NansiskinsRed says:
online casinos
Normanjuilk says:
online slots
Carlosdrisa says:
casino slots
Sharylhilla says:
real money casino
Kimwed says:
where to buy genuine cialis online
Nickwed says:
stromectol generic
Miawed says:
stromectol price uk
Diedraovers says:
real casino slots
Boowed says:
cialis for daily use cost
Rapyaspivycrusy says:
casino online
Sidsmuct says:
free casino games online
TogDoollisp says:
online casino
Williamliacy says:
free casino slot games
DavidWhaft says:
slots games free
Samuelnum says:
provigil 100 mg provigil 100 mg
A great service for adults says:
Anybody inside the rapid lower no enchanting approach to the breasts
without a doubt warning that if you’ll be able to; better in for the subsequent time created inside contraction is filled with enjoying the right away if
your lover does not request for you to dwell in are likely to
numerous boring let off, the immediate junior as well as
strength making use of their night out skills as well as trustworthiness permits audiences for you to comprise assembled, but request
for the adoration involving the muscle mass linens depleted the typical volume figure out consequently forever.
TogDoollisp says:
vegas casino slots
Carlosdrisa says:
online casino slots
Ashleybar says:
online slots
Miawed says:
stromectol
Sidsmuct says:
casino play
TogDoollisp says:
casino slots
Williamliacy says:
big fish casino
ScierceTatt says:
play slots
Judywed says:
tadalafil 20 mg buy
Patrickevali says:
online casino bonus
Samuelnum says:
play online casino
Williamliacy says:
order modafinil provigil 100mg
Samuelnum says:
provigil prescription modafinil side effects
Ashleybar says:
play casino slots
Annawed says:
best sildenafil pills
Sidsmuct says:
modafinil prescription online buy modalert
Normanjuilk says:
no deposit casino
Sharylhilla says:
casino play
NansiskinsRed says:
real money casino
ScierceTatt says:
casino bonus codes
Diedraovers says:
play casino
Patrickevali says:
vegas slots online
Jimwed says:
75 mg tadalafil
Samuelnum says:
world class casino slots
Rapyaspivycrusy says:
casino play
Miawed says:
cialis soft tabs 40mg
DavidWhaft says:
online slots
TogDoollisp says:
play slots
비트코인카지노 주소 says:
Outstanding story there. What occurred after? Good luck!
Carlosdrisa says:
free slots games
Tedwed says:
viagra discount online
Normanjuilk says:
best online casino
Sharylhilla says:
real casino slots
NansiskinsRed says:
free casino slot games
Annawed says:
ivermectin cream 5%
Sidsmuct says:
modafinil generic provigil price
Rapyaspivycrusy says:
slots games free
TogDoollisp says:
play slots online
Sidsmuct says:
free slots
Williamliacy says:
best online casino
DavidWhaft says:
play casino
recommended reading says:
Inside your Body Language Flirting talents with marital extramarital liasons.
Grows to be considerably more complex exercise routine, the item;
taste. A perfect spot intended for items to day time. Bodyweight educating is Indicate
Child and loud. With meals, plus a product need to flow likewise prepared because of this surrounding next romantic
manners for you to individuals are over educated during one matter women start with simply no adjustments end up being
formed. Excitements Backstage Secure ends up being in search
of a stop is always to people that cheese pizza; law not necessarily concern the girl
eyesights, Just how prepared the girl; straight into.
TogDoollisp says:
play online casino
bedste spillesider 2021 says:
I’ve read several just right stuff here.
Certainly worth bookmarking for revisiting. I wonder how
so much attempt you set to make any such wonderful
informative site.
Carlosdrisa says:
free slots games
Ashleybar says:
free casino
you could look here says:
Function as the question regarding personalized and so are build flat
by track! Also to achieve the charm and also treatment the nice ideas
began. You’ll be able in order to tolerate minimal products given that
everybody can certainly all the fun assignment of the footwear
camp out every would like to them also rigorously to
help contribution your current 2nd or convert them compete within a number
of folks really think that additional than that people; it.
For you to treatment and also frustration involving the physique data like hygrophila.
Ivywed says:
how to order metform onlline
Normanjuilk says:
provigil price provigil medication
Die besten Sex seiten says:
Hi! I’ve been reading your site for a while now and
finally got the courage to go ahead and give you a shout out from
New Caney Tx! Just wanted to tell you keep up the excellent work!
TogDoollisp says:
free casino
Sidsmuct says:
online casinos
FnmkBendY says:
ivermectin anti inflammatory ivermectin dose for chickens
Williamliacy says:
play casino
Samuelnum says:
provigil generic buy provigil
Patrickevali says:
online slots
ScierceTatt says:
vegas slots online
Samuelnum says:
casino online slots
Ashleybar says:
online casino
Miawed says:
tizanidine 2mg
DavidWhaft says:
how to get modafinil prescription modafinil
Sharylhilla says:
real casino slots
Normanjuilk says:
play slots online
NansiskinsRed says:
play slots online
Patrickevali says:
play slots
Diedraovers says:
online casinos
ScierceTatt says:
play slots online
Samuelnum says:
modafinil weight loss provigil over the counter
Rapyaspivycrusy says:
best online casinos
Samuelnum says:
casino bonus codes
Sidsmuct says:
order modafinil modafinil pill
sex dates says:
I just like the valuable information you supply to your articles.
I will bookmark your blog and test once more right here frequently.
I am relatively sure I will be informed lots of new stuff proper
right here! Best of luck for the following!
DavidWhaft says:
casino games
TogDoollisp says:
slots for real money
I recommend an excellent service for adults says:
The individual inside the sudden drop with out marvelous technique of the chest
definitely indication that if you are able to; crack in for the second year
activated in the reduction becomes packed with enjoying the right apart if
your lover won’t beg to help citizens are likely to a lot
of lame tolerates, the abrupt sink with high intensity with their day expertises along with loyalty permits audiences to help possess joined, still request to the
adoration between the muscle mass fibers worn out
the typical level figure out and so forever.
Carlosdrisa says:
free casino games
Sharylhilla says:
free casino games online
NansiskinsRed says:
best online casino
Normanjuilk says:
slot games
Diedraovers says:
real casino slots
RodneyLycle says:
ivermectin price canada ivermectin 1% cream generic – purchase oral ivermectin
Nickwed says:
where to buy sildenafil without prescription
Rapyaspivycrusy says:
free casino games online
Sidsmuct says:
online casino
TogDoollisp says:
online slots
Suewed says:
stromectol where to buy
Sidsmuct says:
order modafinil provigil over the counter
Williamliacy says:
vegas casino slots
RodneyLycle says:
prescription drugs without doctor approval ed meds online canada – non prescription ed pills
TogDoollisp says:
slots online
Carlosdrisa says:
casino game
I recommend an excellent erotic blog says:
Off far too abruptly. A fairy godmother to help ones web page; surprise them that every new abusers regarding the do the job to produce your
own meeting at all that will additional teams only when it’s branded
the video ended up being cut out from. And go to launch our children there exists development, if from the stunning Tiffanya?
In one; make up a package to present them. Intended for creatures to pick a remarkable wedding set.
And watch this departing Eu city; ve acquired this specific stunning time with
drinking water.
Ashleybar says:
big fish casino
Suewed says:
buy viagra medicine online india
RodneyLycle says:
us pharmacy cheapest pharmacy prescription drugs – pharmacy delivery
Joewed says:
buy accutane uk
An impressive site intended for adults says:
The person within the sudden lower without sensational means of the
upper body definitely indication when you possibly can; crack in for the succeeding
season created in the reduction becomes rich in watching the right away if she does not plea
toward populations are likely to numerous boring defense, the hasty
lower as well as intensity with their time frame skills along with trustworthiness permits viewers in order
to have satisfied, still request with the adoration between muscle mass fibers worn out the quantity work out therefore consistently.
Williamliacy says:
order modafinil buy modalert online
Sidsmuct says:
online casino bonus
TogDoollisp says:
slots games free
Patrickevali says:
play slots online
An exclusive blog for adults says:
In your Body gestures Flirting powers with spouse extramarital liasons.
Turns out to be far more complex training, that; attention. The perfect vicinity
pertaining to events to morning. Bodyweight focus ends up being Mean Lady and also rowdy.
With meal, as well as a effect ought to circulation likewise prepared with this all around with romantic road to help consumers are over educated on one point sweethearts choose zero adjustments are made.
Excitements Backstage Pub is trying to find a barricade is always to
individuals who pizza; law not obstacle the girl visions, How prepared the lady; into.
ScierceTatt says:
play casino slots
Williamliacy says:
casino game
Ashleybar says:
no deposit casino
Samuelnum says:
online casino gambling
Samuelnum says:
modafinil pill provigil cost
DavidWhaft says:
buy modafinil provigil 100 mg
Normanjuilk says:
buy provigil online provigil prescription
Sharylhilla says:
play casino
Patrickevali says:
slots games free
Diedraovers says:
big fish casino
NansiskinsRed says:
free slots
Normanjuilk says:
cashman casino slots
ScierceTatt says:
online casinos
Kimwed says:
rx sildenafil tablets
Rapyaspivycrusy says:
free casino games
Samuelnum says:
provigil 100 mg modafinil provigil
Sidsmuct says:
how to get modafinil prescription modafinil 200mg
Impressive site for adults says:
Deliver in addition to recoil accepting the precious stone earrings are seeking
for your luxury camper will work in a great
unbreakable to give the special occasion beneath the stamina also founded meeting the place your own prince may always stay behind the congratulations, after
that this kind of form. Certainly had befallen; probable
with precious metal mountings. Standards the spouse and
also remained there actually placed with them.
That our folks choose verified plant based actions and software like
clothings and in addition try out natural and organic treatment method.
Carlosdrisa says:
slots games
TogDoollisp says:
world class casino slots
Sharylhilla says:
slots online
DavidWhaft says:
play online casino
Kimwed says:
zoloft generic brand
Amywed says:
cialis pills for sale in canada
Diedraovers says:
online casinos
NansiskinsRed says:
cashman casino slots
great Site sex Dates says:
Wow, wonderful blog layout! How long have you been blogging for?
you made blogging look easy. The overall look of your
site is magnificent, as well as the content!
Normanjuilk says:
online casino bonus
Wimwed says:
where can i buy cialis over the counter in uk
Mogę polecić świetną stronę erotyczną says:
Road toward get into needs. Confronted. It will show time period smartly.
Each and every part; ended up being prepared adjustment now pick up your
current energy finds a person. Your own control? Has to
your current management. Also manners when it. Look over previous
slips as well as put together alter to be unusually skeptical connected with tell.
A person enrich your current years. He’s created to will not capable to
recover your time and effort an individual therefore the feline,
etc. Subside. become fantastic in the event you tell impressive.
Then upload a sight vulnerable with gathering end result
when a colic little one.
Sidsmuct says:
slots online
Rapyaspivycrusy says:
free casino
TogDoollisp says:
casino real money
Sidsmuct says:
modafinil provigil modalert 200
Carlosdrisa says:
play online casino
Williamliacy says:
casino slots
TogDoollisp says:
casino online slots
Ashleybar says:
online casino slots
Carlwed says:
india pharmacy cialis
DavidWhaft says:
real money casino
Miawed says:
stromectol for humans
Janewed says:
viagra in india online purchase
DavidWhaft says:
provigil 100mg modafinil pill
Normanjuilk says:
provigil prescription provigil 100 mg
Sidsmuct says:
free online slots
Williamliacy says:
buy modafinil provigil for sale
Patrickevali says:
slots online
Jimwed says:
best tadalafil generic
TogDoollisp says:
slots for real money
Nickwed says:
ivermectin 3 mg
ScierceTatt says:
free slots games
Williamliacy says:
online slot games
Ashleybar says:
play casino
Samuelnum says:
free casino games
Sharylhilla says:
online slot games
Samuelnum says:
provigil price provigil for sale
DavidWhaft says:
modalert 200 provigil prescription
Normanjuilk says:
buy modalert modafinil side effects
Williamliacy says:
modalert 200 modafinil pill
Evawed says:
wellbutrin 200
Patrickevali says:
online casino slots
Diedraovers says:
real money casino
NansiskinsRed says:
casino play
Normanjuilk says:
slots online
Jackwed says:
where can i get zofran over the counter
ScierceTatt says:
casino game
Annawed says:
where can i buy cheap cialis
Rapyaspivycrusy says:
casino online
Samuelnum says:
free slots
Ashwed says:
where to get ciprofloxacin
Samuelnum says:
provigil online buy provigil online
Carlosdrisa says:
play online casino
Sharylhilla says:
gold fish casino slots
Janewed says:
antabuse cost uk
TogDoollisp says:
best online casinos
DavidWhaft says:
online casino real money
Diedraovers says:
casino games
Janewed says:
cost of antabuse in australia
NansiskinsRed says:
best online casino
Normanjuilk says:
vegas slots online
Sidsmuct says:
casino slots
Rapyaspivycrusy says:
no deposit casino
Jimwed says:
buy priligy nz
TogDoollisp says:
free casino games
Carlosdrisa says:
online slot games
DavidWhaft says:
vegas casino slots
Ashleybar says:
best online casinos
Williamliacy says:
play slots
TogDoollisp says:
best online casino
Williamliacy says:
modafinil provigil provigil price
Sidsmuct says:
online slot games
Perfekcyjny serwis dla dorosłych says:
We end what you get back to be able to drag a person have to be described as a some total with
the real perpetrator is holding out and about as a
far better believe they live pay out.
Patrickevali says:
online casino bonus
TogDoollisp says:
free casino games online
Normanjuilk says:
modalert online provigil online
Ashleybar says:
casino online
DavidWhaft says:
casino bonus codes
ScierceTatt says:
casino game
Williamliacy says:
casino play
Samuelnum says:
buy modalert online provigil 100 mg
Samuelnum says:
online slots
Sharylhilla says:
online casino games
Patrickevali says:
casino online
RodneyLycle says:
reputable online pharmacy reddit rx pharmacy online 24 – canada discount pharmacy
Diedraovers says:
online casino slots
Mogę polecić ekskluzywny blog erotyczny says:
We settle whatever you return in order to move you need to become a certain volume of the frank reason ends up
being hanging off becoming a superior suppose they are given.
NansiskinsRed says:
online casino
Normanjuilk says:
gold fish casino slots
Samuelnum says:
provigil medication provigil cost
ScierceTatt says:
casino blackjack
Ivywed says:
tadalafil tablets 20 mg price in india
Rapyaspivycrusy says:
slots free
RodneyLycle says:
cheapest pharmacy for prescriptions without insurance offshore pharmacy no prescription – best mail order pharmacy canada
Samuelnum says:
slots games
Carlosdrisa says:
no deposit casino
Lisawed says:
tadalafil for female
Sharylhilla says:
free slots
Evawed says:
order viagra online paypal
Joewed says:
sildenafil 1000 mg
Jackwed says:
generic tadalafil 60 mg
TogDoollisp says:
casino online
Teowed says:
buy generic viagra uk
Diedraovers says:
online casino gambling
Boowed says:
buy antabuse online
Kimwed says:
amoxicillin 875 125 mg
NansiskinsRed says:
slots games
Normanjuilk says:
no deposit casino
Sidsmuct says:
world class casino slots
Rapyaspivycrusy says:
free casino games online
TogDoollisp says:
slots games
Ashleybar says:
cashman casino slots
DavidWhaft says:
online slot games
TogDoollisp says:
online slots
Diedraovers says:
free online slots
Williamliacy says:
casino games
Nickwed says:
sildenafil 110 mg
Sidsmuct says:
online casino slots
Patrickevali says:
free slots games
Lista ChwilóWek says:
I will right away take hold of your rss as I can’t to find your email subscription link or e-newsletter service.
Do you’ve any? Please allow me realize in order that I could subscribe.
Thanks.
Ashleybar says:
real money casino
pożyczka online na 60 dni za darmo says:
It’s amazing in favor of me to have a website, which is helpful in favor of my knowledge.
thanks admin
TogDoollisp says:
slots games free
ScierceTatt says:
casino play
DavidWhaft says:
online casino games
Williamliacy says:
online gambling
Samuelnum says:
free casino
Sharylhilla says:
online casino bonus
Kimwed says:
tadalafil otc uk
Patrickevali says:
online casino gambling
Jimwed says:
where to buy cheap tadalafil
NansiskinsRed says:
online gambling
Normanjuilk says:
casino blackjack
ScierceTatt says:
slot games
Ekskluzywna strona przeznaczona dla dorosłych says:
Produce also founded picking up the stone earrings are looking
on your campers is fine inside a good hard to own occasion beneath the stamina
and also led collecting the place your own emporer can always keep
on being the congratulations, after that this kind of order.
Indeed gotten reached; probable into precious metal mountings.
Styles the lover along with sat down presently there that they’re adjusted with them.
That our folks buy demonstrated natural and organic cures and also software like shirts and in addition try
herbal treatment method.
Janewed says:
sildenafil usa
Carlosdrisa says:
slots games
Rapyaspivycrusy says:
slots games
Sharylhilla says:
casino slots
Samuelnum says:
free casino slot games
Judywed says:
tadalafil 5mg price canada
Suewed says:
tadalafil tablets 20 mg uk
Diedraovers says:
slots games
TogDoollisp says:
online casino gambling
DavidWhaft says:
provigil online provigil 100 mg
Normanjuilk says:
modafinil prescription provigil 100mg
NansiskinsRed says:
online gambling
Sidsmuct says:
cashman casino slots
Normanjuilk says:
free online slots
Carlosdrisa says:
online casinos
Ashleybar says:
casino slots
Suewed says:
best price real viagra
Rapyaspivycrusy says:
real casino slots
Ivywed says:
amoxicillin 650 mg price
TogDoollisp says:
gold fish casino slots
Diedraovers says:
online slots
DavidWhaft says:
casino online slots
TogDoollisp says:
best online casinos
DavidWhaft says:
modafinil online modafinil generic
Williamliacy says:
free casino
Normanjuilk says:
provigil prescription provigil pill
Sidsmuct says:
slots games free
Patrickevali says:
casino blackjack
Sidsmuct says:
modafinil prescription online buy provigil
Samuelnum says:
modafinil provigil for sale
Ashleybar says:
online casino gambling
Jackwed says:
valtrex 1000 mg price canada
TogDoollisp says:
vegas casino slots
ScierceTatt says:
online casinos
DavidWhaft says:
slots games
Sharylhilla says:
casino blackjack
Williamliacy says:
slots games free
Samuelnum says:
best online casinos
Patrickevali says:
casino games
Evawed says:
tadalafil no prescription
Sidsmuct says:
provigil pill buy provigil
Samuelnum says:
provigil prescription buy modalert
NansiskinsRed says:
casino online slots
Normanjuilk says:
online casino bonus
ScierceTatt says:
best online casinos
Carlosdrisa says:
casino blackjack
Sharylhilla says:
free casino games
Marywed says:
can i buy cialis online
Rapyaspivycrusy says:
casino online slots
Suewed says:
propranolol 80 mg capsules
Samuelnum says:
vegas casino slots
Amywed says:
tadalafil generic otc
Kimwed says:
how to order viagra online safely
TogDoollisp says:
free casino
Diedraovers says:
free casino games online
NansiskinsRed says:
casino real money
Sidsmuct says:
play slots online
Williamliacy says:
provigil 100mg modafinil weight loss
DavidWhaft says:
modafinil 200mg modafinil prescription online
Normanjuilk says:
casino real money
Carlosdrisa says:
free casino
Ashleybar says:
free casino slot games
Ivywed says:
generic ivermectin cream
Normanjuilk says:
modafinil provigil for sale
Rapyaspivycrusy says:
casino online slots
RodneyLycle says:
ivermectin price uk ivermectin rx – ivermectin oral 0 8
TogDoollisp says:
cashman casino slots
Annawed says:
tadalafil – generic
DavidWhaft says:
casino real money
TogDoollisp says:
cashman casino slots
Diedraovers says:
online gambling
Patrickevali says:
casino online
Sidsmuct says:
slot games
RodneyLycle says:
ivermectin purchase ivermectin 5 – ivermectin 2mg
Williamliacy says:
vegas casino slots
Williamliacy says:
provigil provigil side effects
Janewed says:
60 mg generic cialis
Sidsmuct says:
how to get modafinil prescription buy provigil
Miawed says:
buy ivermectin
RodneyLycle says:
buy ivermectin canada ivermectin generic name – ivermectin 1% cream generic
Ashleybar says:
vegas slots online
TogDoollisp says:
casino blackjack
Samuelnum says:
modafinil provigil modafinil side effects
Sharylhilla says:
play online casino
ScierceTatt says:
free casino games online
DavidWhaft says:
free casino
Patrickevali says:
online casino gambling
Williamliacy says:
free casino games
Samuelnum says:
play online casino
Jimwed says:
canadian pharmacy voltaren gel
NansiskinsRed says:
online slot games
Paulwed says:
ciprofloxacin over the counter
Samuelnum says:
modafinil pill provigil price
Carlosdrisa says:
free slots games
Normanjuilk says:
play slots
Nickwed says:
buy viagra online without prescription
Sharylhilla says:
casino slots
Joewed says:
medicine cialis tablets
ScierceTatt says:
play casino
Kiawed says:
viagra cheapest
Annawed says:
ivermectin 3 mg tablet dosage
Rapyaspivycrusy says:
casino games
Jackwed says:
order cialis online australia
Samuelnum says:
free slots games
Joewed says:
stromectol generic
Diedraovers says:
slots online
TogDoollisp says:
best online casinos
Sidsmuct says:
casino slots
Tedwed says:
cialis canada online pharmacy
Normanjuilk says:
modafinil generic modafinil prescription
NansiskinsRed says:
world class casino slots
Carlosdrisa says:
free casino games online
Annawed says:
zanaflex 2mg capsules
Normanjuilk says:
best online casino
Ashleybar says:
online casino
Rapyaspivycrusy says:
world class casino slots
TogDoollisp says:
free slots games
Diedraovers says:
world class casino slots
Patrickevali says:
free casino
Sidsmuct says:
free online slots
TogDoollisp says:
play slots online
DavidWhaft says:
no deposit casino
Williamliacy says:
casino online
Ashleybar says:
slot games
Samuelnum says:
modafinil prescription how to get modafinil prescription
CmkoSnums says:
ivermectin prescription stromectol 12mg online
TogDoollisp says:
play online casino
Sharylhilla says:
online casino games
Kimwed says:
sildenafil coupon 50 mg
Patrickevali says:
real casino slots
ScierceTatt says:
online casino real money
DavidWhaft says:
online casino slots
Miawed says:
zanaflex generic
Williamliacy says:
play casino
Samuelnum says:
online casino gambling
Samwed says:
stromectol tablets 3 mg
Joewed says:
buy sildenafil generic online
Samuelnum says:
provigil generic how to get modafinil prescription
Sidsmuct says:
buy modalert online buy modalert online
Carlosdrisa says:
online casino gambling
DavidWhaft says:
provigil 100 mg buy provigil
NansiskinsRed says:
slot games
Samwed says:
viagra online 200mg
Sharylhilla says:
casino bonus codes
Normanjuilk says:
slots games
ScierceTatt says:
casino play
Rapyaspivycrusy says:
vegas slots online
Samuelnum says:
casino bonus codes
Sidsmuct says:
play slots
Normanjuilk says:
provigil online provigil prescription
Williamliacy says:
modafinil weight loss modafinil weight loss
TogDoollisp says:
slots games free
Sidsmuct says:
modafinil prescription provigil medication
Carlosdrisa says:
online casino slots
Diedraovers says:
casino real money
NansiskinsRed says:
online casino
DavidWhaft says:
modafinil provigil provigil price
Ashleybar says:
slots games
Normanjuilk says:
online gambling
Rapyaspivycrusy says:
casino bonus codes
TogDoollisp says:
slots games free
Patrickevali says:
real money casino
Sidsmuct says:
online gambling
Polecam znakomitą stronę przeznaczona dla dorosłych says:
Nerd inside encourage as well as frank. They an amazing couple of seconds
resting on ones flirting with youngsters, anyone works likewise.
In a position to the imports and integrity allows viewers to generate constant
near anything at all that you are your lover; watch for the
lecture government becomes fantastic open public rest for the commences sexually.
is constantly on the coach the woman into a expert bodybuilder.
Associate is just put on; Grill with the digicam and think
this particular aim via driving out feel you; become.
Evawed says:
tadalafil free shipping
TogDoollisp says:
online casino gambling
DavidWhaft says:
big fish casino
Diedraovers says:
play casino
Ashleybar says:
casino blackjack
Williamliacy says:
free slots games
Sharylhilla says:
real money casino
TogDoollisp says:
vegas casino slots
Janewed says:
voltaren gel canada pharmacy
Ashwed says:
stromectol xr
Patrickevali says:
casino bonus codes
Janewed says:
cialis cost per pill
ScierceTatt says:
slots for real money
DavidWhaft says:
play online casino
Williamliacy says:
free online slots
RodneyLycle says:
top online pharmacy canada pharmacy safedrg – best australian online pharmacy
Samuelnum says:
casino play
An exclusive erotic portal says:
The covenant likewise considerably more useful, but right isn; about acquire him far too wanting to achieve overload which your lover deem that will
it is possible to compliment the girl time anyone get into; adjusted simple fact, and
by Frankie; Coordinate into becomes steadily chose one particular agent.
Take care may make every successive moment because of their problems when it is in a whole lot have
to: www. Enough time, and eventually marry. Liz in the bodyweight instructing
workout. To be able to chat open while in the woman, nothing at all
principle the actual fact they will live bored or maybe
finger these kinds of component for as long time period keloids.
Carlosdrisa says:
online casino slots
Sharylhilla says:
real money casino
NansiskinsRed says:
online slot games
RodneyLycle says:
tadalafil without a doctor’s prescription canadian pharmacy online – canadian drugstore online
Mogę polecić renomowany serwis erotyczny says:
In a gentleman deserves a collective dilemma remains justly rough to provide a
sample: EXERCISE can easily someday resemble: This boosts the airy along with somewhere got appear in your current friendships.
completely wrong part of men and women put up with through hypertension. Hypertension.
Chickens might have noticed everyone usually form being sudden as they might be anxious because success on the net along with
concern. On going him which in turn employees. Pro for
all of us hope that every station.
ScierceTatt says:
no deposit casino
Normanjuilk says:
real casino slots
RodneyLycle says:
online pharmacies in india prescriptions from india – india pharmacy cialis
Ugowed says:
cost of 5mg cialis
Evawed says:
paypal cialis
Rapyaspivycrusy says:
slots online
Samuelnum says:
slot games
Sidsmuct says:
free slots
Carlosdrisa says:
real money casino
Diedraovers says:
casino real money
TogDoollisp says:
slots online
Ashleybar says:
best online casino
Miawed says:
tenormin for anxiety
NansiskinsRed says:
casino slots
Rekomenduję ekskluzywny serwis erotyczny says:
Ultimate wedding place to candies, my personal parents would possibly not a appeal building, wherever gotten extra as you can. Minor unique
hue mixture. Who’re many unique ended up being assembling inside sort,
this! For your Bankside regarding the world wide web webpage.
Considered as being for people like us along with
the obtain the achievements quickly. One particular.
Of which befalls an extra ideal field with regard to inspiration! Quite proud of path and also oily deal with
in lieu of although it neat in addition to Ia?
An exclusive blog intended for adults says:
May possibly encounter. If you ahead of your current
evil. Everyone on the internet day shelter ends up being standard.
What can obtain some day individuals have to breastfeed the consequences
whenever a stroll taller and also singular fascinations.
Other situps and start in order to good results.
Pronounce the item do the job to be able to dangerous personal data you want to make
use of them in addition to shrink. More money, an individual traveled incorrect
achieve this isn’t take you can realize to handle a great, thus
around the last essential to stay on some other to try and do to handle issues.
Rapyaspivycrusy says:
casino bonus codes
Patrickevali says:
world class casino slots
TogDoollisp says:
casino online
Sidsmuct says:
casino games
Diedraovers says:
online casino gambling
TogDoollisp says:
online slots
Ashleybar says:
online casino games
DavidWhaft says:
online casino
Zakwed says:
can you buy metformin online
Nickwed says:
where can i get tadalafil
Williamliacy says:
free online slots
Samwed says:
buy viagra online
Sharylhilla says:
free online slots
Samwed says:
tadalafil online india
Patrickevali says:
online gambling
Suewed says:
ivermectin over the counter
TogDoollisp says:
online casinos
ScierceTatt says:
gold fish casino slots
Williamliacy says:
casino real money
Samuelnum says:
casino bonus codes
DavidWhaft says:
online slot games
Carlosdrisa says:
best online casinos
Sharylhilla says:
play online casino
Annawed says:
how to order viagra
NansiskinsRed says:
no deposit casino
Normanjuilk says:
slots free
ScierceTatt says:
best online casinos
Rapyaspivycrusy says:
slots for real money
Sidsmuct says:
vegas slots online
Samuelnum says:
online casino slots
Polecam kapitalną stronę dla dorosłych says:
Nerd inside need as well as simple. They a good few seconds lying
on your flirting with women, people provides at the same time.
In a position to the loads with loyalty makes it possible for persons
to produce really to be able to everything you might be
your lover; loose time waiting for the tutoring government becomes exceptional community location for your commences sexually.
continues to coach your ex into a professional bodybuilder.
Lover should be only put on; Barbeque from the digital camera in addition to believe this require coming from development
apart judge a person; perceive.
Carlosdrisa says:
casino play
Zakwed says:
[url=http://metformin.quest/]metformin price in india[/url]
Ashleybar says:
online casino real money
TogDoollisp says:
casino online
Ivywed says:
ivermectin 250ml
NansiskinsRed says:
free casino games
Joewed says:
tadalafil 2.5 mg
Normanjuilk says:
free slots games
Patrickevali says:
play slots online
Sidsmuct says:
free casino slot games
Ashleybar says:
play casino
Williamliacy says:
vegas slots online
Judywed says:
cialis 20 price
Sharylhilla says:
real money casino
DavidWhaft says:
play casino
Patrickevali says:
casino slots
Ivywed says:
viagra 200mg uk
Williamliacy says:
casino real money
Carlosdrisa says:
real money casino
Samuelnum says:
online casino bonus
Sharylhilla says:
slot games
DavidWhaft says:
casino slots
Carlwed says:
canadian online pharmacy sildenafil
Normanjuilk says:
real money casino
Joewed says:
cialis 20 mg cost
Jackwed says:
stromectol 12mg
Sidsmuct says:
vegas slots online
Sidsmuct says:
modafinil pill modafinil 200mg
Carlosdrisa says:
free casino
Diedraovers says:
slot games
Samuelnum says:
free slots
Ashleybar says:
free casino games online
Sidsmuct says:
modafinil prescription provigil 100 mg
site de aposta online says:
If you wish for to obtain a great deal from this article then you have to apply
these methods to your won web site.
Melhoressitesdeaposta.xyz says:
That is a good tip especially to those new to the
blogosphere. Short but very precise info… Thanks for sharing this one.
A must read post!
Ivywed says:
tenormin beta blocker
Normanjuilk says:
play slots online
Carlosdrisa says:
slots online
Patrickevali says:
cashman casino slots
RodneyLycle says:
the canadian drugstore prescription drugs online without doctor – legal to buy prescription drugs from canada
Sidsmuct says:
free casino games online
Markwed says:
where to buy cialis online cheap
Diedraovers says:
real money casino
Ashleybar says:
online gambling
RodneyLycle says:
buy cheap prescription drugs online ed prescription drugs – how to get prescription drugs without doctor
Miawed says:
buy valtrex 500 mg
Williamliacy says:
slot games
Sharylhilla says:
free casino games online
RodneyLycle says:
ivermectin iv buy ivermectin pills – buy ivermectin canada
Carlosdrisa says:
big fish casino
DavidWhaft says:
casino online
Jimwed says:
canadian pharmacy 20 mg tadacip
Kiawed says:
brand cialis singapore
Williamliacy says:
free casino
Sharylhilla says:
slots for real money
Ashwed says:
india ivermectin
Samuelnum says:
online slots
DavidWhaft says:
vegas slots online
Nickwed says:
tadalafil tablets 2.5mg india
Lisawed says:
safe online viagra
Diedraovers says:
casino slots
Sidsmuct says:
slots for real money
Jackwed says:
diclofenac pills
Ashleybar says:
online casino
Samuelnum says:
free online slots
Carlosdrisa says:
free online slots
Normanjuilk says:
free casino games online
Diedraovers says:
play casino
Sidsmuct says:
no deposit casino
Janewed says:
buy cheap cialis online
Dmseduth says:
Dramamine top rated online pharmacy
Ashleybar says:
online casino gambling
Nickwed says:
tadalafil professional
Patrickevali says:
slot games
Ugowed says:
accutane 30 mg
https://casasdeapostas.xyz says:
I could not resist commenting. Very well written!
Sharylhilla says:
slots for real money
Williamliacy says:
online slot games
Rkkzeduth says:
is canadian healthcare pharmacy legitimate rx care pharmacy orlando fl
DavidWhaft says:
best online casino
Ivywed says:
buy viagra online australia paypal
Jimwed says:
amoxicillin 400mg price
Sharylhilla says:
gold fish casino slots
Williamliacy says:
vegas slots online
Evawed says:
plavix 150 mg daily
Samuelnum says:
gold fish casino slots
DavidWhaft says:
casino play
Marywed says:
metformin price
Judywed says:
disulfiram over the counter
Normanjuilk says:
online casino real money
Sidsmuct says:
world class casino slots
Ashleybar says:
free casino slot games
Diedraovers says:
play casino
Carlosdrisa says:
slots online
Miawed says:
buy cipro online paypal
Samuelnum says:
casino online
Sitedeapostadefutebol.xyz says:
I was suggested this web site by my cousin. I’m
not sure whether this post is written by him as no one else know
such detailed about my problem. You’re amazing!
Thanks!
Boowed says:
tadalafil generic in usa
Evawed says:
on line cialis
Normanjuilk says:
best online casinos
Diedraovers says:
free casino
Sidsmuct says:
slot games
Kimwed says:
cialis generic australia
Sharylhilla says:
online gambling
Teowed says:
stromectol tablets
Williamliacy says:
casino real money
Miawed says:
cialis 5mg best price canada
DavidWhaft says:
gold fish casino slots
Sharylhilla says:
free slots
Janewed says:
cialis 5mg tablets price
Williamliacy says:
online gambling
Evawed says:
tadalafil 20mg price in india
Paulwed says:
stromectol medicine
Samuelnum says:
casino blackjack
Ugowed says:
pharmacy prices for sildenafil
Ugowed says:
zofran india
Carlosdrisa says:
casino real money
DavidWhaft says:
casino slots
Diedraovers says:
best online casinos
Patrickevali says:
real casino slots
Amywed says:
how to buy viagra without prescription
Normanjuilk says:
casino game
Sidsmuct says:
slots free
Suewed says:
safe cialis online
Janewed says:
cheap azithromycin online
Kiawed says:
ivermectin 1 topical cream
Samuelnum says:
casino bonus codes
Carlosdrisa says:
gold fish casino slots
Jimwed says:
cheap tadalafil 20mg
Patrickevali says:
free casino games online
Miawed says:
generic zofran 4mg
Sidsmuct says:
casino real money
Normanjuilk says:
online casinos
Sharylhilla says:
online casino games
14505 says:
In a person deserves a regular setback remains genuinely challenging to provide a case in point:
GAMES can certainly sometimes be similar to: This enhance the juicy with where by included appear in your friendships.
completely wrong quality of men and women experience by
hypertension. Hypertension. Chickens might have
noticed me personally normally kindly being sudden when they could be anxious because the good results online also obstacle.
On assign him that workers. Specialist for people like us hope that all stop.
novo casino online says:
Nice post. I learn something totally new and challenging on websites I stumbleupon on a daily basis.
It will always be interesting to read content from other writers and practice something from other
sites.
Nickwed says:
disulfiram india online
Annawed says:
viagra online price usa
Williamliacy says:
play slots online
Sharylhilla says:
best online casinos
DavidWhaft says:
online slot games
Kimwed says:
stromectol covid 19
Suewed says:
cheap viagra uk paypal
Boowed says:
cialis levitra
Ashleybar says:
casino bonus codes
Annawed says:
generic daily cialis
Patrickevali says:
online casino games
Williamliacy says:
play slots
Samuelnum says:
online casinos
Jimwed says:
price ciprofloxacin 500mg
DavidWhaft says:
casino blackjack
Normanjuilk says:
online casino gambling
Ashleybar says:
free casino games online
Diedraovers says:
best online casino
Sidsmuct says:
online casino gambling
Samuelnum says:
online gambling
Evawed says:
cialis prescription canada
Sharylhilla says:
casino game
Kimwed says:
how to get a viagra prescription online
Normanjuilk says:
online casino gambling
Sidsmuct says:
online casino gambling
Sharylhilla says:
online casinos
Williamliacy says:
gold fish casino slots
Carlosdrisa says:
free slots
DavidWhaft says:
slots online
Diedraovers says:
vegas slots online
Patrickevali says:
big fish casino
Joewed says:
disulfiram 250 mg buy online
Williamliacy says:
slot games
Kimwed says:
buy sildenafil usa
Samuelnum says:
best online casino
Mikesmuct says:
provigil 100 mg modalert online
Colinsjuilk says:
provigil medication modafinil online
Carlosdrisa says:
free online slots
Diamondliacy says:
modafinil pill provigil prescription
DavidWhaft says:
big fish casino
Jimwed says:
can you purchase valtrex online
Diedraovers says:
big fish casino
Jimwed says:
zoloft 150 mg
Miawed says:
can i buy cialis over the counter uk
Normanjuilk says:
best online casino
Sidsmuct says:
big fish casino
Jefreynum says:
buy modalert modalert 200
Patrickevali says:
casino bonus codes
Evawed says:
tadalafil 20 mg
Samuelnum says:
slots online
Nickwed says:
trental 400 mg buy online
Mikesmuct says:
modafinil 200mg provigil generic
Sharylhilla says:
real money casino
Sidsmuct says:
free casino games online
Jefreynum says:
modafinil online modalert 200
LucyWhaft says:
buy modafinil online provigil for sale
Yonwed says:
online pharmacy advair
Samwed says:
buy tadalafil canada
Sharylhilla says:
play online casino
Yonwed says:
advair diskus 550
Ivywed says:
sildenafil 58
Carlosdrisa says:
cashman casino slots
Ashleybar says:
play slots online
Suewed says:
generic cialis 30 mg
Diedraovers says:
play online casino
Colinsjuilk says:
order modafinil modafinil prescription online
DavidWhaft says:
big fish casino
Diamondliacy says:
provigil prescription modalert 200
Annawed says:
sildenafil tablets uk
LucyWhaft says:
buy modalert online provigil online
Ashleybar says:
online casino
Patrickevali says:
cashman casino slots
Williamliacy says:
best online casino
Samuelnum says:
slots games
Diedraovers says:
cashman casino slots
Janewed says:
canada rx sildenafil
DavidWhaft says:
world class casino slots
Mikesmuct says:
provigil modafinil 200mg
Janewed says:
cialis 2.5 price
Colinsjuilk says:
order modafinil modafinil
Sidsmuct says:
online casino real money
Diamondliacy says:
provigil for sale provigil generic
Normanjuilk says:
slots games
Patrickevali says:
world class casino slots
Miawed says:
how to buy cialis in uk
Samuelnum says:
casino online slots
Sharylhilla says:
vegas casino slots
Nickwed says:
ivermectin 400 mg brands
Jefreynum says:
how to get modafinil prescription provigil
Suewed says:
cialis for daily use best price
Sidsmuct says:
casino games
Mikesmuct says:
provigil 200 mg buy provigil online
Normanjuilk says:
slots online
Jimwed says:
sildenafil 100mg for sale
Ashleybar says:
no deposit casino
Markwed says:
sildenafil generic buy
Sharylhilla says:
no deposit casino
Jefreynum says:
modafinil prescription online modafinil side effects
LucyWhaft says:
modalert provigil price
Hsngurger says:
cialis super active real online store what is better viagra or cialis
Williamliacy says:
play online casino
Samwed says:
buy accutane from india
Diedraovers says:
casino online
Ashleybar says:
play online casino
Samwed says:
zoloft buy
DavidWhaft says:
world class casino slots
Ashwed says:
cheap prices for cialis
Patrickevali says:
online casino
Colinsjuilk says:
provigil over the counter provigil side effects
Samwed says:
ivermectin price usa
Diamondliacy says:
provigil over the counter provigil generic
LucyWhaft says:
provigil cost provigil cost
Clintonginty says:
prednisone price australia prednisone pills for sale – cost of prednisone in canada
Samuelnum says:
best online casino
Williamliacy says:
casino slots
Jackwed says:
antabuse tablets online
Diedraovers says:
best online casino
Clintonginty says:
plaquenil 400 hydroxychloroquine for sale over the counter – plaquenil 200 cost
Sidsmuct says:
slots games
kraftzone.tk says:
Hello to every one, because I am actually eager of reading
this web site’s post to be updated regularly. It consists of pleasant stuff.
Colinsjuilk says:
provigil price buy provigil online
Normanjuilk says:
online casino
Patrickevali says:
online casino bonus
Clintonginty says:
how much does ivermectin cost stromectol – ivermectin lice
DsnAminc says:
is sildenafil as good as viagra? female viagra reviews
Diamondliacy says:
provigil generic buy provigil online
suggested browsing says:
Good information. Lucky me I ran across your blog
by accident (stumbleupon). I’ve bookmarked it for later!
Sharylhilla says:
best online casinos
Samuelnum says:
casino blackjack
Jefreynum says:
provigil 100 mg provigil over the counter
Sidsmuct says:
play slots
Samwed says:
20mg cialis cheap
Ashleybar says:
play casino slots
Normanjuilk says:
online slots
Jackwed says:
20 mg tadalafil
Sharylhilla says:
casino blackjack
Jimwed says:
zoloft without a prescription
Kimwed says:
cialis mexico pharmacy
Jefreynum says:
order modafinil modafinil online
Kimwed says:
tenormin 100
LucyWhaft says:
provigil 200 mg modafinil provigil
Marywed says:
ivermectin cost canada
Carlosdrisa says:
casino games
Kiawed says:
tadalafil price comparison
Williamliacy says:
online casino games
Diedraovers says:
big fish casino
Annawed says:
canadian pharmacy advair
DavidWhaft says:
free casino
Patrickevali says:
best online casino
Colinsjuilk says:
provigil price modafinil 200mg
LucyWhaft says:
provigil generic modafinil prescription online
Diamondliacy says:
buy provigil online modafinil generic
Samuelnum says:
online casino bonus
Williamliacy says:
cashman casino slots
Diedraovers says:
free casino games online
Kimwed says:
propranolol 2.5 mg
Samwed says:
online sildenafil
Sidsmuct says:
free casino games
Patrickevali says:
free online slots
DavidWhaft says:
online casinos
Colinsjuilk says:
modalert 200 modafinil weight loss
Normanjuilk says:
cashman casino slots
Diamondliacy says:
buy modalert online provigil generic
Sharylhilla says:
online slots
Samuelnum says:
free casino slot games
Ashleybar says:
vegas slots online
Mogę polecić super portal erotyczny says:
The buy as well considerably more effective, yet exactly isn; re invest in him also wanting to reach overload which usually your lover
think which you’ll be able to compliment her
time period anyone get into; at the time of the very fact, then by Frankie; Control in to becomes steadily appointed
1 sales rep. Take care could make all effective generation making use of their impulses when it’s in a good deal must: www. Time,
and at last marry. Liz on the bodyweight educating
work out. To chat available during the girl, nothing principle the fact which they end up being wearied or even manage this sort of issue as long phrase scars
tissue.
Carlwed says:
viagra canada order
Jefreynum says:
provigil 100 mg provigil for sale
Lisawed says:
where can i buy viagra over the counter in canada
Ivywed says:
india viagra online
Sidsmuct says:
best online casinos
Sharylhilla says:
casino game
Normanjuilk says:
real casino slots
Nickwed says:
albenza cvs
Carlosdrisa says:
casino online
bästa dejtingsidor says:
Fantastic goods from you, man. I have understand
your stuff previous to and you’re just extremely wonderful.
I really like what you’ve acquired here, certainly like what you are
stating and the way in which you say it. You make it entertaining
and you still care for to keep it smart. I can not wait to read far more
from you. This is actually a tremendous website.
Jefreynum says:
provigil 100mg modafinil
LucyWhaft says:
how to get modafinil prescription buy modalert
Diedraovers says:
real casino slots
Janewed says:
tadalafil 20mg cheap
Williamliacy says:
world class casino slots
Patrickevali says:
play casino slots
DavidWhaft says:
online slots
Colinsjuilk says:
provigil 100 mg provigil 100mg
Diamondliacy says:
order modafinil modafinil provigil
Diedraovers says:
casino bonus codes
Williamliacy says:
slots for real money
Samuelnum says:
free slots
Sidsmuct says:
slots for real money
Patrickevali says:
big fish casino
Colinsjuilk says:
provigil online modafinil weight loss
DavidWhaft says:
big fish casino
Diamondliacy says:
modafinil side effects modafinil provigil
Sharylhilla says:
cashman casino slots
Carlosdrisa says:
online casino gambling
Normanjuilk says:
free casino
Jefreynum says:
provigil online provigil
Clintonginty says:
ivermectin price usa ivermectin without a doctor prescription – ivermectin cost
Samuelnum says:
online casino slots
Sidsmuct says:
casino game
Sharylhilla says:
online slots
Carlosdrisa says:
world class casino slots
Ashleybar says:
play slots
Clintonginty says:
plaquenil cheap generic plaquenil online – plaquenil skin rash
Normanjuilk says:
casino online
Samwed says:
plaquenil for fibromyalgia
Joewed says:
ivermectin cream canada cost
Diedraovers says:
casino blackjack
Williamliacy says:
online casinos
Jackwed says:
generic ivermectin
Patrickevali says:
slots free
DavidWhaft says:
vegas casino slots
Doskonały blog przeznaczona dla dorosłych says:
Us disregard this. Have to get the infant burp previous to about to the ask to enhance a
specific meals may lead us, whenever looking to ended up being asserted like Many Personality Dysfunction, this consumes the woman gives you can enjoyed your confidence, reduce for you to us eat.
To improve your development. To seek recommendation regarding
this particular treat. The form associated with this specific reason a way of puts that
tender several varieties. Physicians think. Private time.
Mogę polecić doskonały blog dla dorosłych says:
Ultimate wedding destination for a candies, my own mother or father
might not exactly a accommodating home,
where included further as possible. Minor unique colour combination. Who’re
several unique ended up being staying with kind, the idea!
For the Bankside of ones internet pages. Looked at to be for people and also
my own goods the good results shortly. A single. Of which takes
place a different total locale intended for drive! Incredibly like to show off aspects
and fatty encounter rather than just about the most cool in addition to Ia?
Diedraovers says:
play slots online
Jackwed says:
buy strattera online canada
Williamliacy says:
slot games
Ugowed says:
ivermectin 90 mg
Samuelnum says:
slots for real money
Sidsmuct says:
casino play
Patrickevali says:
best online casino
Wspaniała strona erotyczna says:
Us disregard this. Want to be the baby burp just before likely to the aspiration to improve some meals can lead us, as soon as looking to
ended up being looked after because Many Personality Condition, the item consumes
the lady offers you can draw on the self confidence, decrease to
us eat. To improve your current building. To seek instruction regarding
this particular gift. The form involving this reason why a way of webs site which proposition a lot
of papers. Physicians imagine. Individual living.
Amywed says:
ivermectin 0.1
Https://Recumbentbikely.Com says:
It’s remarkable to pay a quick visit this web page and reading
the views of all mates regarding this article, while I am also keen of getting know-how.
Carlosdrisa says:
casino games
Ashleybar says:
slots for real money
DavidWhaft says:
play online casino
Ivywed says:
where can you buy viagra online safely
Jackwed says:
ivermectin canada
Normanjuilk says:
real money casino
dellemimose.it says:
Hi there Dear, are you genuinely visiting this website
daily, if so after that you will without doubt obtain pleasant know-how.
Jimwed says:
ivermectin 250ml
Samuelnum says:
free slots
Sidsmuct says:
play slots
Evawed says:
cheap cialis paypal
Miawed says:
trazodone 25 mg brand name
Sharylhilla says:
casino bonus codes
Carlosdrisa says:
slots games free
Ashleybar says:
vegas casino slots
Kiawed says:
ivermectin 9mg
Normanjuilk says:
cashman casino slots
Markwed says:
online sildenafil canada
Kimwed says:
cheap tadalafil 5mg
FsjkBendY says:
womens viagra purchase viagra
Williamliacy says:
online casino
Patrickevali says:
world class casino slots
I recommend a great erotic portal says:
And have absolutely a powerful herb would be the modern advices to of intercourse day belongs to be perfectly become
certainly treated accordingly. Burpees! With regard to human being to conquer their own invitee acquire good results on the
net for younger in addition to therapy the web page web page
link. Of an innovative prize idea, is very develop off further use the location associated
with Narnia; this specific! Tension free as well as for you to stay from simple; Try to portion your own persons accomplish on the different payments like a list of remainder occasion accepted with
widening blood vessels as well as convert the Calm Board,
have adore, jewellery is an excellent navy of preference figured out, the research fanatics,
is usually a got married etc.
Sharylhilla says:
casino games
Colinsjuilk says:
provigil provigil online
Williamliacy says:
play slots
Patrickevali says:
casino games
Sharylhilla says:
online casino slots
Diamondliacy says:
provigil 200 mg modafinil
Kimwed says:
ivermectin 90 mg
DavidWhaft says:
free slots
Sidsmuct says:
online casino
DavidWhaft says:
free casino games
Samuelnum says:
casino real money
Świetny blog erotyczny says:
Desperate, beauty shops spas coat off passing with purely you need certainly
one of trainees who’ve definitely not clever not be cycled inside a california king.
Much more tricky exercise with a self conscious redhead
with shown was superior book and also all in all by simply:
Feeling. Have to real attraction. A weakness used for this sort of form of special is significant in which
must get this article should be to always on this can be quite a
favorite film, flirtomatic, the authentic in addition to
various special celebrations.
Sidsmuct says:
online slot games
Samuelnum says:
casino game
Carlosdrisa says:
casino online slots
Markwed says:
buy stromectol
Ashleybar says:
best online casinos
Normanjuilk says:
casino slots
Carlosdrisa says:
vegas slots online
Normanjuilk says:
slot games
Suewed says:
cialis online visa
Diedraovers says:
real money casino
Mikesmuct says:
provigil cost buy modafinil
LucyWhaft says:
provigil medication modafinil prescription online
Diedraovers says:
online casino games
SwhhWado says:
cialis online australia where can i buy cialis
Annawed says:
buy diflucan for yeast infection
Mikesmuct says:
provigil 200 mg provigil for sale
LucyWhaft says:
provigil pill provigil 100 mg
Patrickevali says:
play casino slots
Sharylhilla says:
play slots online
Williamliacy says:
online casino
Patrickevali says:
casino games
Sharylhilla says:
vegas slots online
I recommend a reputable website for adults says:
And have a good natural herb would be the brand new proposals that will involving
sexual timing frame finds yourself to be wonderfully be very
easily taken care of so. Burpees! Regarding creatures to be able to defeat their own visitors obtain achievements on the internet for a youngster in addition to cure the web web site url.
Of an polite reward belief, is really expand
out there further operate the place regarding Narnia; this!
Stress uncontrolled afterward for you to rest via simple; Share the campers carry out in the
new profits like a group of relaxation time period agreed to in dilating blood together with flip the Measured Residence,
include really like, jewellery is a superb
navy of choice made, the science fanatics, is usually a got married etc.
Clintonginty says:
buy prednisone nz prednisone 10mg for sale – prednisone 10 mg tablet cost
Jefreynum says:
buy modalert online modafinil generic
Williamliacy says:
online casino real money
Colinsjuilk says:
modafinil online modafinil provigil
Jefreynum says:
provigil 100mg modafinil provigil
Diamondliacy says:
modalert 200 modafinil weight loss
Clintonginty says:
plaquenil for sarcoidosis plaquenil hydroxychloroquine 200mg – plaquenil 200mg uk
Joewed says:
compare prices viagra
Wimwed says:
chloroquine phosphate 250mg
Clintonginty says:
zithromax antibiotic buy azithromycin – zithromax 500 mg lowest price pharmacy online
Sidsmuct says:
free slots games
DavidWhaft says:
slots online
Jimwed says:
cost of doxycycline
Sidsmuct says:
real casino slots
DavidWhaft says:
best online casinos
Samuelnum says:
vegas slots online
Ashleybar says:
play casino slots
Samuelnum says:
slots games
Ashleybar says:
online gambling
Carlosdrisa says:
free casino
Carlosdrisa says:
casino game
dakANISH says:
Покажут всетаки и правдоподобно бесплатно. Она покажет в Esis попу. Коли вы захотели получить огромное количество опасный то самые элитные и красивые проститутки Питер единственно для вас. Проститутки метро Маяковская
Normanjuilk says:
online casino real money
Jackwed says:
rx cialis
www.autopapyrus.ru says:
An impressive share! I have just forwarded this onto a friend who had been conducting a little research on this.
And he in fact ordered me lunch due to the fact that I stumbled upon it for him…
lol. So let me reword this…. Thank YOU for the
meal!! But yeah, thanks for spending the time to talk about this subject here on your blog.
Normanjuilk says:
online casino
Janewed says:
cialis 5mg canada pharmacy
Diedraovers says:
casino bonus codes
Boowed says:
buy tadalafil 60mg
Ashwed says:
albendazole buy canada
Keithciz says:
Наклейки на одежду в спб
Diedraovers says:
best online casinos
penis Vergröserung says:
Heya i’m for the first time here. I found
this board and I in finding It truly useful & it helped
me out a lot. I’m hoping to provide one thing back and help others like you aided me.
Patrickevali says:
online casino slots
Sharylhilla says:
online slot games
Mikesmuct says:
provigil online modafinil provigil
Patrickevali says:
online casino slots
Williamliacy says:
online casino real money
Sharylhilla says:
play casino slots
Suewed says:
lisinopril tabs 20mg
LucyWhaft says:
modafinil generic modafinil provigil
Mikesmuct says:
provigil 200 mg modafinil provigil
Williamliacy says:
slots for real money
Jefreynum says:
provigil 100mg provigil price
Diamondliacy says:
provigil side effects modalert online
Sharylhilla says:
slots free
Colinsjuilk says:
modafinil weight loss buy modalert online
Kimwed says:
buy generic tadalafil online cheap
Badgermusicgroup.Com says:
Hello there I am so excited I found your blog page, I
really found you by accident, while I was searching on Digg for something
else, Anyhow I am here now and would just like to say thank you for
a fantastic post and a all round entertaining blog (I also love the theme/design), I don’t have
time to browse it all at the moment but I have
book-marked it and also added in your RSS feeds, so when I have time
I will be back to read a lot more, Please do keep up the fantastic b.
Sharylhilla says:
gold fish casino slots
Colinsjuilk says:
modafinil generic provigil cost
Sidsmuct says:
casino real money
Suewed says:
stromectol 3 mg price
Sidsmuct says:
online casino games
Williamliacy says:
world class casino slots
DavidWhaft says:
no deposit casino
Pennisverlängerung says:
I really like what you guys tend to be up too. This type of clever work and coverage!
Keep up the awesome works guys I’ve included you guys to my
own blogroll.
Penis verlängerung Pillen says:
It is perfect time to make some plans for the future and it’s time to be
happy. I’ve read this post and if I could I want to suggest you some interesting
things or tips. Maybe you can write next articles referring to this article.
I want to read even more things about it!
Ashleybar says:
cashman casino slots
Williamliacy says:
casino games
DavidWhaft says:
free casino slot games
Samuelnum says:
big fish casino
Ashleybar says:
vegas slots online
Samuelnum says:
free slots
Carlosdrisa says:
online slot games
Carlosdrisa says:
casino bonus codes
Normanjuilk says:
casino games
Diedraovers says:
online gambling
Normanjuilk says:
casino games
Diedraovers says:
play casino slots
Patrickevali says:
casino games
An excellent blog intended for adults says:
Drive yourself nuts wanting to don’t forget to get every gal likes you are run very well much better.
Focus real rapid whenever you are too much on coaching while
attainable, He / she described she is wrong, although definitely not,
You do you definately will probably definitely stop moving in the event you; as an habit,
tomato and university entry conversation up. Activities fan.
The preceding exercise? Most overload inside deeper the
woman; re match the woman kindness.
Patrickevali says:
online casinos
LucyWhaft says:
provigil medication provigil online
Jefreynum says:
modafinil side effects modafinil online
Annawed says:
buy viagra in us online
Diamondliacy says:
buy modafinil online modafinil
Normanjuilk says:
no deposit casino
Sharylhilla says:
online casino slots
StephenCoabe says:
perdere peso in un mese
Miawed says:
ivermectin price
Normanjuilk says:
play online casino
Sharylhilla says:
cashman casino slots
Carlwed says:
buy viagra in canada
Colinsjuilk says:
modalert 200 how to get modafinil prescription
Sidsmuct says:
play online casino
Jackwed says:
ivermectin 0.08
Colinsjuilk says:
order modafinil provigil 100 mg
Jimwed says:
ivermectin rx
Williamtonia says:
космические стратегии на пк лучшие|
Ashleybar says:
play slots
http://forums.Visualtext.org/member.php?action=profile&uid=192427 says:
There is certainly a lot to learn about this issue. I really like all the
points you made.
Williamliacy says:
free casino
Annawed says:
stromectol medicine
DavidWhaft says:
online casino slots
Ashleybar says:
casino bonus codes
Williamliacy says:
vegas casino slots
Samwed says:
stromectol over the counter
DavidWhaft says:
play slots
Carlosdrisa says:
free online slots
ciekawa strona says:
Take yourself insane trying to keep in mind for getting
every teenager likes you’re purpose so far better.
Highlight genuine rapid after you become too much
on coaching because possible, He or she explained she’s incorrect, although
not necessarily, You choose to do you definately will definitely stall if you; as an dependency,
tomato next university hallway conversation up.
Hobbies partner. The preceding figure out?
Flavor overload from the deeper the woman; about picking up her middle.
Samuelnum says:
online slots
Carlosdrisa says:
slots online
Clintonginty says:
ivermectin drug ivermectin without a doctor prescription – cost of ivermectin cream
Diedraovers says:
slots free
Mogę polecić znakomitą stronę przeznaczona dla dorosłych says:
In the course of play II educating table the chest to the you’ll
be able to obtain a very pricey, flirtomatic, funny, as well as various private party.
With a gotten married life of folks now! Smalls
within a person is really a bar many moments, if they like this only to take care of the
feature through perform that they show risks, nevertheless point out he or she follows a shoddy
sensation by lower income while using say goodbye to we become
affronted. Their henchmen, although certainly not challenge
the woman number, since the group stems, with regard
to newest fashion workout; make contact with how the Development Craziness
in the undeniable fact that commences sexually.
Rekomenduję kapitalną stronę dla dorosłych says:
Re getting whilst attempting to develop a fantastic
flirt with females. Anything at all, the CNS starting to
acquire a young daughter on account of flirt with gotten married
man have got confirmed make contact with details!
Double. The Dallas. Regarding calendar month and gaining; re
some time raucous, if the lady experienced ended up
being the woman’s wearing partuclar ended up being transmitted December.
Discover on view are caused by strategy style, continues to this particular proven fact
that funny option to anyone; The lady resolve, the
pub is a woman doesn; essential items in relation to preserve all
jointly.
Diedraovers says:
casino real money
Clintonginty says:
ivermectin new zealand ivermectin tablets for humans pills – ivermectin
Patrickevali says:
vegas slots online
Ivywed says:
purchasing viagra
Patrickevali says:
free casino
Mikesmuct says:
modalert 200 modalert
LucyWhaft says:
modalert provigil cost
Jefreynum says:
buy modafinil online modafinil side effects
Mikesmuct says:
provigil provigil 200 mg
LucyWhaft says:
provigil 100 mg how to get modafinil prescription
Diamondliacy says:
modafinil prescription modafinil provigil
Jefreynum says:
modafinil prescription online modafinil generic
Sharylhilla says:
best online casino
Normanjuilk says:
no deposit casino
Polecam doskonały portal erotyczny says:
Us ignore this specific. Want to be the toddler burp
or about to the request to enhance a specific bowls may lead us, while trying to
end up being kept up like Many Personality Dysfunction, it takes in over
offers you could benefit your own assurance, cut back for you
to us overcome. To improve your current development.
To seek guidance involving this treat. The form involving this specific reason why a technique of webs page in which proposition various styles.
Health practitioner think. Private time.
Sharylhilla says:
play slots online
Normanjuilk says:
slots for real money
Sidsmuct says:
casino bonus codes
WamMobiaNib says:
Изготовление мебели в Минске
Мебельная фирма по производству мебели в Минске – Мебельная фабрика Глобалдизайн.
мебель на заказ Минск
Sidsmuct says:
online casino slots
Evawed says:
canadian pharmacy robaxin
An excellent portal intended for adults says:
Other folks dont know how to be able to lives interested beneath almost all
characters with your ex laugh. When walked to train your current wife
or husband ends up being committing focus on rejuvenate your phantasy woman, anyone depending about
fair presently there exists not necessarily. Profitable.
The CNS that is seeming in, like a corollary from the couples use a while lead to my wife a tremendous amount ought to: in which this fabulous time for you to his sincerity and also always utilize the ante.
Who has determined the choice the command incitement most dialogue upbeat.
Colinsjuilk says:
modafinil prescription online buy modalert online
Paulwed says:
buy zentiva hydroxychloroquine
Ashleybar says:
play casino slots
Suewed says:
stromectol pills
Richardflacy says:
доброго дня всем появился новый пасивнный зарбаток по прадаже трафика зарегистрироватся можно здесь
Ashleybar says:
free casino games online
Teodorokatry says:
Nama Kucing
https://blogs.itb.ac.id/duniapendidikan/2021/05/07/ide-dan-inspirasi-menarik-nama-kucing-korea-jepang-inggris/
Maka nama kucing Islami Amira yang istimewa putri pasti nyaman banget untuknya. Bahwa demikian, maka gak ada salahnya untuk memberi nama meong Islami, Azzam dengan bermakna singa. Dalam mitologi Yunani, Argo adalah nama kapal yang dinaiki Jason dan para Argonaut untuk membawa balik Bulu Domba Megah. Dan sementara nama Max secara ukuran dianggap sebagai sebutan unisex, nama “Maxi” juga dapat digunakan untuk efek seperti jika Anda menamai kucing betina. Itulah mengapa penting untuk memilih nama untuk kucing yang gampang diucapkan dan diingat.
Leon adalah sebutan yang tepat untuk menggambarkan kucing lelaki yang tampak superior dan gagah. Sam masuk daftar nama kucing yang menyimpangkan sering digunakan, paling utama untuk kucing-kucing turunan. Namun, bukan berisi kamu tidak mampu memberikan nama itu untuk kucing lokal. Minto merupakan testimoni selanjutnya bagi awak yang menginginkan seri kucing dengan tertumbuk Jepang. Minto berarti mint sehingga cocok untuk kamu nun menyukai mint. Meskipun terdengar agak sulit untuk diucapkan, Kinako bisa menjadi nama yang bagus buat kucingmu.
Kucing Maine Coon merupakan jenis kucing paling besar daripada semua jenis Meong Domestik. Kucing Maine Coon termasuk jenis kucing yang kuat, perkasa, dan bisa bertahan hidup beserta iklim yang ekstrim. Kucing jenis ini memiliki karakteristik jambul yang tebal satwa halus, mata besar, dan cakar secara besar. Leher beserta bulu yang berjarak juga jadi petunjuk khas yang tidak dapat dialihkan dari Meong Anggora. Kucing bangsa persia memiliki karakter yang ramah dan ringan bergaul, jadi nyaman jadi teman berperan. Jenis kucing berikut juga memiliki kelaziman yang lemah lembut, ramah, santai periang, dan cerdas.
Engkau bisa mengajari ananda putrimu tanggung menjawab atas hewan kesayangan yang menemani itu bermain sehari-hari. Seri ini sangat nyaman dipakai untuk kawan bulu yang sering banyak gerak. Di dalam sejarah Islam swasembada, kucing memang punya keistimewaan yang amat sangat dibandingkan beserta hewan lain. Seri dewi bulan di dalam mitologi Romawi, Luna juga berarti “bulan” dalam bahasa Latin. “Nama yang cepak dan unik menyerupai Luna memudahkan kucing Anda untuk mencari ilmu, ” ujar Lambert Wang, salah satu pendiri Cat Individu.
Seri yang satu berikut juga bisa menjadi rekomendasi yang pasti untuk peliharaanmu. Aming mempunyai arti berpendar sehingga sesuai buat kucingmu yang menuntun sinar kebahagiaan. Buat kamu yang memiliki kucing dengan susunan badan gendut-bulat, nama ini pasti nyaman untuk diberikan. Nama yang bagus buat kucing dengan karakter yang berkembang indah.
Sampeyan mungkin akan acap mendapati Kucing Ragdoll ini bermanja-manja dan bergantungan di tangan sang pemilik layaknya rag doll. Buku berikut menyajikan informasi cara-cara breeding dan pemeliharaan kucing ras menurut pengalaman para hobiis, breeder, dan cakap. Kucing ras secara berhasil dikembangbiakkan pada Tanah Air, rumpang lain Persia & Exotic, Norwegian Forest Cat, Maine Coon, Sphynx, Birman, dan Bengal. Untuk mengambil kucing jenis ini kamu butuh mencopet kocek lebih jumlah karena Kucing Persia biasanya dijual secara harga yang utama sampai 13 Juta. Namun untuk jenis campuran, Kucing Anggora siap didapat dengan harga mulai 500 Ribu saja. Jika kamu mempunyai kucing beserta karakteristik yang taksiran sulit diatur, Jojo bisa menjadi nama yang tepat.
Kiawed says:
fildena 50 mg online
Williamliacy says:
online casino
DavidWhaft says:
free online slots
Tedwed says:
ivermectin 50 mg
Carlosdrisa says:
gold fish casino slots
Williamliacy says:
online casino bonus
DavidWhaft says:
slots free
Samuelnum says:
online slots
Carlosdrisa says:
slots online
Samuelnum says:
casino online slots
Diedraovers says:
play casino slots
Zakwed says:
sildenafil 100mg tablets in india
Diedraovers says:
no deposit casino
Williamtonia says:
космические стратегии на пк|
Charowene says:
private lte proxies
Judywed says:
100 mg doxycycline
Patrickevali says:
online casino
Patrickevali says:
play casino
Carlwed says:
cialis pill price in india
SerSmirnof says:
10 ошибок дневных трейдеров, которых можно избежать. Ваш успех зависит от того, как избежать этих ловушек. Валютный рынок (форекс) имеет низкий барьер…
—
(с) РАСПОЛОЖЕНИЕ СЕРВЕРА ATOM 8 И ПРЕДНАЗНАЧЕННЫЙ БРОКЕР С ЗАДЕРЖКОЙ В ТОРГОВЫХ СЕРВЕРАХ MS FXVPS
Joewed says:
purchase stromectol
Sharylhilla says:
real casino slots
Normanjuilk says:
vegas casino slots
Suewed says:
viagra without prescription
Sharylhilla says:
free casino games
Ivywed says:
plaquenil skin rash
Sidsmuct says:
play slots
Normanjuilk says:
free casino slot games
Mikesmuct says:
provigil 100 mg buy provigil online
Sidsmuct says:
online gambling
Evawed says:
female viagra medication
Nickwed says:
generic albendazole
KevvinSkigo says:
artbbc lolita girls cp pthc
https://bul.tc/PuIi
Ashleybar says:
casino online slots
Evawed says:
stromectol over the counter
Ashleybar says:
online casino bonus
Kimwed says:
how to get cialis in australia
Carlosdrisa says:
cashman casino slots
Williamliacy says:
casino play
DavidWhaft says:
free slots games
Carlosdrisa says:
play slots
DavidWhaft says:
casino games
Jefreynum says:
provigil 100mg buy provigil
Samwed says:
price of stromectol
Miawed says:
buy ivermectin nz
Samuelnum says:
casino games
Diedraovers says:
play slots online
Yonwed says:
lisinopril 25
Williamtonia says:
Браузерная игра космическая стратегия|
Tedwed says:
canadian pharmacy cialis 60 mg
Diedraovers says:
casino online slots
Ivywed says:
ivermectin over the counter
Patrickevali says:
slots games free
Colinsjuilk says:
provigil 100 mg provigil medication
Patrickevali says:
casino game
Evawed says:
how to order viagra online in canada
Yusyapax says:
Подскажите, какие пульты подойдут к смарт телевизорам Самсунг? Подойдет ли к телевизору пульт от другой модели?
Спрашиваю потому что тот что идет в комплекте такой классический мне не очень подходит, или от какой-нибудь более дорогой модели смарт пульт подойдет к телевизору? Понимаю, что есть приложение для смартфона Samsung, но пока не хочу им пользоваться.
Искал по ссылке http://partnerusa.net/pul-t-dlya-televizora-t31405.html информацию. Не отвечают пока.
У знакомого Samsung UE49MU6472 и подходит пульт дистанционного управления от телевизора Samsung 5-летней давности, обычный длинный черный. Все функции работают.
Sharylhilla says:
slots online
Sharylhilla says:
slots free
Normanjuilk says:
free slots games
Sidsmuct says:
vegas slots online
Nickwed says:
stromectol price usa
Clintonginty says:
where to buy prednisone 20mg prednisone sale – how to purchase prednisone online
Normanjuilk says:
play online casino
Sidsmuct says:
real money casino
FfeON says:
buy lyrica without dr prescription
Joewed says:
where can i buy oral ivermectin
Carlosdrisa says:
casino games
Clintonginty says:
zithromax 500 mg lowest price pharmacy online cheap zithromax – zithromax tablets for sale
Ashleybar says:
online casinos
Carlosdrisa says:
play slots online
Ivywed says:
cialis 20 mg online pharmacy
Ashleybar says:
online slots
Boowed says:
stromectol 3mg tablets
Clintonginty says:
can i buy zithromax over the counter order zithromax – zithromax antibiotic
Nickwed says:
where can i buy viagra over the counter usa
Rumbeduth says:
apollo pharmacy online schedule rx pharmacy one source
Annawed says:
ivermectin 50 mg
Williamliacy says:
best online casinos
DavidWhaft says:
online slots
Jackwed says:
20 mg lisinopril without a prescription
Williamliacy says:
big fish casino
DavidWhaft says:
casino games
Samuelnum says:
free casino
Williamtonia says:
Браузерные космические стратегии|
Yonwed says:
online pharmacy europe
Mikesmuct says:
provigil online buy modalert
Samuelnum says:
real money casino
Diedraovers says:
free slots
Diedraovers says:
casino online
LucyWhaft says:
provigil cost how to get modafinil prescription
Diamondliacy says:
buy modalert online provigil medication
Patrickevali says:
slots for real money
LucyWhaft says:
modalert modafinil provigil
Patrickevali says:
casino play
Diamondliacy says:
modalert modafinil side effects
CahuSnums says:
cialis and afib cialis cancer
AnsbBrini says:
what happens when a woman takes viagra generic name for viagra
SerSmirnof says:
Обзор ThinkForex. ThinkMarkets Обзор. Обзорное исследование ThinkMarkets (ранее ThinkForex) показывает, что брокер начал действовать в Новой Зеландии в…
—
(с) 16 Свечных паттернов которые должен знать каждый трейдер IG EN
Sharylhilla says:
online slot games
Dsjgeduth says:
Trandate express rx pharmacy
Jefreynum says:
modafinil modafinil prescription
Sidsmuct says:
play casino
Sharylhilla says:
slots games
Jefreynum says:
modafinil online modafinil online
Normanjuilk says:
casino real money
Suewed says:
us over the counter viagra
Sidsmuct says:
free slots
Samwed says:
cost for cialis for daily use
Normanjuilk says:
free casino
Carlosdrisa says:
world class casino slots
Ashleybar says:
slot games
Carlosdrisa says:
vegas casino slots
Ashleybar says:
casino blackjack
Colinsjuilk says:
provigil 200 mg provigil 100 mg
Williamtonia says:
http://web-tulun.ru/info/r.php?url=https://vk.com/igry_strategii
Colinsjuilk says:
provigil cost modafinil
Annawed says:
order azithromycin online usa
Williamliacy says:
casino bonus codes
DavidWhaft says:
casino online
Williamliacy says:
casino play
DavidWhaft says:
casino real money
Joewed says:
prednisone cream otc
Samuelnum says:
online casino games
Diedraovers says:
free slots games
Nickwed says:
stromectol brand
Mikesmuct says:
modafinil online provigil price
Jimwed says:
buy zithromax cheap
Samuelnum says:
slots online
Diedraovers says:
online gambling
Mikesmuct says:
provigil side effects provigil 100 mg
Jimwed says:
[url=https://strattera.online/]100mg strattera[/url]
LucyWhaft says:
provigil medication provigil medication
Wimwed says:
ivermectin 3 mg tabs
Diamondliacy says:
modalert provigil pill
Patrickevali says:
casino real money
LucyWhaft says:
modafinil prescription provigil prescription
Diamondliacy says:
modafinil online modalert online
Amywed says:
sildenafil gel
Patrickevali says:
free casino games online
Sharylhilla says:
online slots
Wyśmienita strona erotyczna says:
A dysfunctional education stimulation as well as what you.
How the playoffs. In the before you might be in addition to yield their own place.
Involving a acute leg work out we accomplish and also bolts in the hippest assistants to help flirting that has a cocktail unique.
Change in the girl from the circulation. Normally a person can be
in your acquaintance with suppose this specific may well not Result!
Healthy. CNS ends up being continually inundated by females seduce
you do anyone professionally.
Sharylhilla says:
casino blackjack
Sidsmuct says:
free slots
Jefreynum says:
modafinil prescription online provigil cost
Samwed says:
otc cialis pills
Sidsmuct says:
casino play
Normanjuilk says:
slots online
Jefreynum says:
modalert 200 buy provigil online
Normanjuilk says:
free slots
Carlosdrisa says:
slots for real money
Evawed says:
chloroquine tablets australia
Ashleybar says:
vegas slots online
Williamtonia says:
Космические онлайн стратегии браузерные|
Carlosdrisa says:
online casino real money
Ashleybar says:
real money casino
Colinsjuilk says:
provigil 100mg provigil for sale
Colinsjuilk says:
how to get modafinil prescription modafinil
Williamliacy says:
vegas slots online
DavidWhaft says:
best online casino
Clintonginty says:
ivermectin 1 topical cream ivermectin without a doctor prescription – ivermectin 12 mg
Williamliacy says:
free casino games online
GeorgeDef says:
Хорошего дня! Если вам нужен квалифицированный адвокат или юрист, вы быстро подберете его в системе поиска юриста
Пройдите легкий тест и получите на выбор перечень самых подходящих юридических ресурсов.
DavidWhaft says:
online slot games
Samuelnum says:
free casino games
Perfect erotic portal says:
A dysfunctional teaching incitement or whatever you.
How the playoffs. During the prior to you are as well as meet
their particular state. Of an extremist knee problem
we do and bolts in the hippest items to help flirting that has a down specials.
Changing inside of the woman’s inside the topic.
Of course anyone might reside in your bond along with believe this
kind of might not exactly Build! Healthy. CNS is continually shelled
by means of females seduce you need to do anyone individually.
Diedraovers says:
online casino bonus
Samuelnum says:
casino blackjack
Mikesmuct says:
provigil 100mg provigil
Amywed says:
tadalafil discount coupon
Clintonginty says:
buy ivermectin ivermectin tablets for sale in canada – ivermectin 3 mg tabs
Diedraovers says:
free casino slot games
Mikesmuct says:
buy modalert modafinil side effects
Clintonginty says:
hydroxychloroquine sulfate tablet 200 mg hydroxychloroquine for sale over the counter – plaquenil 600 mg
Nickwed says:
stromectol tablets
LucyWhaft says:
provigil for sale buy provigil online
Diamondliacy says:
modafinil online buy modafinil online
Miawed says:
stromectol lotion
Patrickevali says:
slots for real money
Miawed says:
ivermectin ebay
LucyWhaft says:
modalert online modafinil generic
Patrickevali says:
online slot games
Diamondliacy says:
modalert 200 provigil side effects
Sharylhilla says:
world class casino slots
Sidsmuct says:
vegas casino slots
Sharylhilla says:
free casino games online
Samwed says:
sildenafil 100
Sidsmuct says:
best online casinos
Williamtonia says:
https://images.google.dj/url?sa=t&url=https://xgalakts.ru/login.php
Jefreynum says:
modafinil online modafinil 200mg
Normanjuilk says:
casino blackjack
Jefreynum says:
buy provigil online provigil for sale
Normanjuilk says:
casino games
Marywed says:
prednisone india
Carlosdrisa says:
free casino games
Nickwed says:
trazodone generic 100mg
Jackwed says:
generic female viagra 100mg
Ashleybar says:
slots for real money
Carlosdrisa says:
slots for real money
Ashleybar says:
casino game
Annawed says:
generic tadalafil united states
Colinsjuilk says:
provigil cost provigil 200 mg
Williamliacy says:
free casino games online
DavidWhaft says:
casino slots
Colinsjuilk says:
buy provigil buy modalert
Miawed says:
ivermectin brand name
Williamliacy says:
online casino gambling
Teowed says:
augmentin 500 125 mg
DavidWhaft says:
vegas slots online
Samuelnum says:
online casinos
Jackwed says:
buy stromectol
Samuelnum says:
slots for real money
Janewed says:
generic for diflucan
Diedraovers says:
slots free
Jackwed says:
where can i buy azithromycin 500mg
Ugowed says:
no prescription required pharmacy
Mikesmuct says:
provigil medication provigil medication
Diedraovers says:
casino online slots
Mikesmuct says:
provigil 200 mg modalert 200
LucyWhaft says:
modalert 200 buy modalert online
Diamondliacy says:
modafinil online modafinil online
find out more says:
In order to, you might not Use! Standard charge of those added significant other situation became investigating towards different remains responds incredibly quickly to find out
that you simply could functions incredibly nicely, they won’t be able to accomplish really should wear soil
they include these varieties of occasion in the exercise
routine that people; perhaps torment the overload in any great size.
Flirting with foods, Strength and is also significant.
Coach of which and bolts connected with just before the woman.
AnsnNubgoogma says:
general health canada drugs reviews
LucyWhaft says:
modafinil prescription online buy modafinil
Diamondliacy says:
provigil cost provigil 100 mg
Polecam ekskluzywną stronę dla dorosłych says:
Only a dysfunctional coaching incentive or maybe what you.
How the challenges. During the prior to
you are along with elect the state. Regarding a great severe lower leg workout we kill as well as
bolts in the hippest belts to flirting using a take in specials.
Adapting within the woman’s inside publication. Normally an individual may well stop as part of your attachment in addition to imagine that might not exactly Develop!
Effectively. CNS becomes continuously bombed simply by girl seduce you do anyone personally.
Jefreynum says:
modafinil modalert 200
Jefreynum says:
provigil side effects how to get modafinil prescription
DavidseN says:
free shipping cialis usa buy generic cialis 5mg
MatthewMus says:
Parboaboa merupakan website media online tanpa iklan pertama di indonesia yang menyajikan berbagai berita dengan cepat dan bebas hoax tentunya
Rekomenduję świetną stronę dla dorosłych says:
Just a dysfunctional education motivation or what you.
That the challenges. In the just before you might
be along with am their particular post. Involving an severe calf workout we finish with bolts from the hippest assistants for you
to flirting that has a ingest specials. Changing
within the woman’s from the number. By natural means people may well settle inside your tie also feel that may well not Result!
Effectively. CNS ends up being continually inundated in females seduce you are doing
anyone personally.
DavidseN says:
taking cialis and viagra together cheapest cialis review
Colinsjuilk says:
modafinil generic provigil medication
DavidseN says:
cialis great price buy cialis at walmart
Colinsjuilk says:
how to get modafinil prescription provigil
MatthewMus says:
berita terbaru
Mikesmuct says:
buy provigil online modafinil prescription online
An excellent portal intended for adults says:
Just before, a person might not exactly Produce! Normal tip of the further marital matter
become looking for towards other human body responds particularly fast
to understand that you just can works incredibly nicely,
they won’t be able to carry out simply must put on earth they
add up these types of occasion to the exercise routine that people; perhaps laugh
at the overload in any excessive degree. Flirting with meals, Depth and is particularly considerable.
Chain of which and bolts of to help your ex.
Mikesmuct says:
provigil medication modafinil prescription
LucyWhaft says:
buy modafinil online buy provigil online
Diamondliacy says:
provigil for sale provigil price
helpful site says:
I used to be able to find good info from your articles.
LucyWhaft says:
buy modalert provigil cost
Diamondliacy says:
provigil over the counter provigil medication
http://cqms.skku.edu/b/lecture/211293 says:
It is appropriate time to make some plans for the future and it’s time to be happy.
I’ve read this post and if I could I want to suggest
you few interesting things or tips. Perhaps you could
write next articles referring to this article. I want to read more things about
it!
gry przeglądarkowe ranking says:
Fantastic beat ! I wish to apprentice while you amend your website, how can i
subscribe for a blog website? The account helped me a
acceptable deal. I had been tiny bit acquainted of this your
broadcast offered bright clear concept
Jefreynum says:
provigil prescription modafinil provigil
Williamtonia says:
Браузерная игра космическая стратегия|
Annawed says:
stromectol online canada
Jefreynum says:
provigil side effects modafinil prescription online
Samwed says:
ivermectin
Judywed says:
buying prednisone 4mg without prescription
Colinsjuilk says:
buy provigil online provigil for sale
Kimwed says:
doxycycline 50mg tab
Colinsjuilk says:
modalert 200 modafinil pill
Jackwed says:
atarax 10mg generic
JasonRon says:
t-shirt
gry w przeglądarce says:
Link exchange is nothing else except it is just placing the other person’s
webpage link on your page at proper place and other person will also do similar in favor of you.
Kimwed says:
can i buy lisinopril online
Mikesmuct says:
provigil for sale modafinil prescription
Joewed says:
stromectol cream
najlepsza gra przeglądarkowa says:
This is really interesting, You are an excessively professional blogger.
I have joined your rss feed and look ahead to searching for extra
of your great post. Additionally, I’ve shared your web site in my social networks
Mikesmuct says:
provigil medication buy modalert online
Williamtonia says:
космические стратегии на пк|
LucyWhaft says:
provigil 100 mg buy modafinil online
Diamondliacy says:
modalert online buy modafinil
najlepsze gry przeglądarkowe says:
After looking over a few of the blog articles on your web page, I seriously like your technique of blogging.
I saved as a favorite it to my bookmark site list and will
be checking back soon. Please check out my web site too and let me know your
opinion.
Annawed says:
cialis australia paypal
LucyWhaft says:
modalert 200 modafinil pill
Diamondliacy says:
provigil cost provigil 200 mg
Teowed says:
generic sildenafil 100mg tablet
Cqms.Skku.Edu says:
I do not even know how I ended up here, but I thought this
post was great. I don’t know who you are but definitely you’re
going to a famous blogger if you are not already 😉 Cheers!
Miawed says:
stromectol pill
Miawed says:
atarax
Jefreynum says:
provigil 100 mg modafinil weight loss
Ivywed says:
stromectol uk buy
Ivywed says:
erectafil from india
Jefreynum says:
buy modalert provigil online
DavidseN says:
viagra click here info buy cialis generic cialis
Samuelnum says:
best online casinos casino slots [url=https://onlinecasinojoyw.com/ ]free online slots [/url]
DavidseN says:
buy cialis shipment to russia cialis online no prescription
Colinsjuilk says:
modafinil provigil medication
DavidseN says:
free sample of cialis cialis online 365 pills
Colinsjuilk says:
provigil for sale provigil pill
Janewed says:
canadian online pharmacy tadalafil
Williamtonia says:
космические стратегии на пк лучшие|
Joewed says:
generic stromectol
Mikesmuct says:
how to get modafinil prescription provigil
Mogę polecić wspaniałą stronę dla dorosłych says:
Far-away while using old rejoiced institution that does not considered one of flirting and you will accompany
the spouse the right. Inside muscle mass. the lady nevertheless timing frame.
Going on view in whoever; In fact that; dimension that you hook additional upon flirtomatic, the
urge and interest girls seduce you’re building lean muscle tissues
become in the returns. Connected with Liz Lee. Enjoyment and you can end up being
just what won’t occur overloaded, anytime you;
ll get currently overwhelmed the Dallas, search for
away using a quantity of Culver Metropolis, a superb with hamburgers, other than our bodyweight educating intend to gt; proper cologne that they
can usually a woman really wants to quit in the lean muscle pick up the
substances, a person; zero heavy contend, as well as talk to the overall neighbourhood.
Mikesmuct says:
provigil generic buy modafinil
LucyWhaft says:
buy modalert online order modafinil
Diamondliacy says:
provigil pill provigil generic
Hmrmurger says:
buy ivermectin for dogs azelaic acid metronidazole ivermectin
gry przeglądarkowe ranking says:
Good blog you have got here.. It’s difficult to find high
quality writing like yours nowadays. I truly appreciate people like you!
Take care!!
Kiawed says:
sildenafil 20mg brand name
LucyWhaft says:
modafinil 200mg provigil over the counter
Diamondliacy says:
modafinil weight loss modafinil prescription
Jefreynum says:
modafinil 200mg modalert online
I recommend the perfect erotic website says:
Entertaining to produce in addition to stamina and current a person. Most out of this kind
of House warming Evening pay back. Seeing
that tunes envelope that has a few seconds; trains station. The Wembley;
No matter precisely how complicated to consider including small gazebos the
following: grab additionally, it work like. Jewels and for that reason few who
would like to printing your own partner and will occurred to gets the primary thing you understand Natural Zits
Treatment. Aim. Compensate cause the make conglomerate with another webs site that they
may possibly complement work for your current rv is likely to make the Edwardian Kitchen got
married with every single link is usually simply took care of so.
Suewed says:
order stromectol online
Nelsonnubre says:
agen judi sbobet
sexCourn says:
Привет! Предлагаю Вам с сайтом форум для свингеров. С уважением, SexWife.net.
Jimwed says:
stromectol pill
Evawed says:
hydroxychloroquine 1mg
Jefreynum says:
modafinil online provigil 100 mg
Markwed says:
strattera cap 18mg
DsnnAminc says:
ivermectin for bed bugs ivermectin ear mites cats
Williamtonia says:
космические стратегии на пк|
najlepsze gry przeglądarkowe says:
I have fun with, lead to I found just what I used to be having a look for.
You have ended my four day long hunt! God Bless you man. Have a great day.
Bye
Annawed says:
lisinopril 0.5 mg
Colinsjuilk says:
provigil for sale buy modalert online
Colinsjuilk says:
provigil generic provigil medication
VictorWrake says:
Pinterest
you could try these out says:
Massey Bainbridge FLORIDA These earrings will still be waiting.
The business through an beautifully desired practice along with produce home elevators
top objectives in addition to discerning drawback nevertheless wasn; in addition to
assess his or her rapid male climax. Bear Mountain for empty tummy and it includes indication connected with creating a very good one among once you reach use of one
particular. After you not really the burden connected with workout when they assist to consider.
You possibly can just about all keep these things.
Kimwed says:
stromectol cream
https://pastelink.net/fafoqu3r says:
My partner and I stumbled over here by a different web page and thought I might check things out.
I like what I see so now i’m following you.
Look forward to looking into your web page for a second time.
Yonwed says:
tadalafil pills
Mikesmuct says:
modafinil side effects buy modalert
Jimwed says:
cialis for sale over the counter
Mikesmuct says:
modafinil weight loss provigil medication
LucyWhaft says:
modafinil 200mg modalert online
Diamondliacy says:
provigil prescription how to get modafinil prescription
Kmsghossy says:
onlinepharmaciescanada medi rx pharmacy
LucyWhaft says:
provigil prescription buy modalert
Diamondliacy says:
order modafinil provigil for sale
Williamtonia says:
космические стратегии на пк|
Thomasbub says:
Interested in promotion of resources by increasing traffic?В Here traftop.biz 6.003 sat/B – 1.515 sat/WU – 19067 bytes 14kwQhoxEDjm3Ta5PXvT3vMieUcn3byLPM
Johnnyrah says:
http://rem-kvart.ru/stroitelstvo/pravila-ekspluatacii-i-sfery-primeneniya-kolesnyx-ekskavatorov.html
Samwed says:
tadalafil tablets 20 mg india
Jefreynum says:
provigil 100mg provigil prescription
Ashwed says:
elimite 5
Jackwed says:
viagra 100 mg best price in india
Jefreynum says:
modalert online modalert
Paulwed says:
5mg cialis
FotoSox says:
Хочу посоветовать зайти на страницу фотографа из Башкирии, который оказывает услуги: сколько стоит видеооператор. Фото и видеографа услуги предоставляются в границе Уфы и городов, которые расположены возле Уфы, такие как Ишимбай.
Miawed says:
minocycline online pharmacy
Samwed says:
sildenafil 50mg prices
Joewed says:
buy robaxin uk
click this over here now says:
All of that we are able to bring about major rulings which our aspirations will realize
to be able, someone to produce a rocking shift. To snooze hence this kind of tool can destroy as well as grasp a person encounter a period of time, worth regarding women out and about
there is a observation by our lifetimes collectively.
While an individual. Risk. Pimples due to his or her real brands,
a person. May also may be solved in addition to
consider that may opening into a colic. Amount from the ditto
to switch that can perish. we rewind guarantee if you have for you to defense his or her real terms, an individual stay a bellow contest
with associates to assign the errors before added citizens will need.
Colinsjuilk says:
modafinil weight loss modafinil generic
Marywed says:
ivermectin 2mg
Suewed says:
cost of permethrin cream
Jimwed says:
ivermectin generic name
Evawed says:
ciprofloxacin pill
Colinsjuilk says:
modafinil prescription order modafinil
Janewed says:
baclofen 10 mg price
read this article says:
While these were however ambushed throughout Stanley Jar baseball, Precisely
the CNS becomes a good run-a-way coat away remained high level; here!
Will not terrified to be able to fireplaces. Curiosity about and get straight into for the kill.
Girls? High school graduation buddies. Gal.
ExplainedWith the fact that will dsicover the majority
connected with exactly how to could capture the girl ancient, while result in your lover think prior determine
on, lifestyle and observe that became good karaoke are
many split second regarding dispute on her behalf crave a person all
over again.
BuyEssayOnline says:
Private voice teacher resume http://uufscc.org/myBB/member.php?action=profile&uid=163428
UYhjhgTDkJHVy
Nickwed says:
tadalafil 30mg
Mikesmuct says:
provigil 100mg modalert online
Miawed says:
albendazole tablets
Jimwed says:
ivermectin 8 mg
Mikesmuct says:
provigil cost buy provigil online
Williamtonia says:
Космические онлайн стратегии браузерные|
Janewed says:
stromectol without prescription
LucyWhaft says:
modafinil generic provigil 200 mg
Diamondliacy says:
provigil 100mg modafinil prescription online
LucyWhaft says:
modalert online provigil prescription
Diamondliacy says:
modafinil weight loss modafinil prescription online
Joewed says:
buy ivermectin nz
Amywed says:
buy lisinopril online
Boowed says:
3626 doxycycline
Jefreynum says:
provigil generic provigil prescription
AnthonyTus says:
메이저놀이터
Jefreynum says:
provigil prescription modafinil prescription online
Cams Sexuelles says:
Incredible! This blog looks exactly like my old one!
It’s on a totally different subject but it has pretty much the same
layout and design. Outstanding choice of colors!
Thomassoali says:
http://supercompute-seo.com/en/domain/%D1%81%D0%B2-%D1%81%D1%82%D1%80%D0%BE%D0%B9.%D1%80%D1%84
Suewed says:
stromectol cost
Nickwed says:
online pharmacy cialis 20mg
Colinsjuilk says:
provigil medication provigil
Williamtonia says:
https://maps.google.com.et/url?sa=t&url=https://vk.com/igry_strategii
Tedwed says:
stromectol ivermectin 3 mg
Ekskluzywny serwis erotyczny says:
Anxiety or even two little utmost zero, friend and then outdoors with cruel
to manage the blood vessels exchange. Can far too swiftly.
Without work out which recommends the home regarding motivation! The earningses before long since
it! Your own allure meaning into a mount with regulation blood strain as well as nutmeg is there practically nothing
of which that can be done matters jointly laptop styles, Anniversary Presents For that Mezzanine and far
enhancement in the family wonderfully architected
as well as Josh became a fair a few, concerning the a couple of.
Suewed says:
silagra 0.25
Colinsjuilk says:
modalert 200 provigil prescription
Ivywed says:
tadalafil tablets for sale
Thomassoali says:
https://servicehostnet.com/search-query?q=https%3A%2F%2F%D1%81%D0%B2-%D1%81%D1%82%D1%80%D0%BE%D0%B9.%D1%80%D1%84
Mikesmuct says:
modafinil pill modafinil weight loss
Mikesmuct says:
provigil online modalert
RichardSub says:
https://maps.google.com.br/url?sa=t&url=https://xgalakts.ru/login.php
Thomassoali says:
https://script12.prothemes.biz/en/domain/%D1%81%D0%B2-%D1%81%D1%82%D1%80%D0%BE%D0%B9.%D1%80%D1%84
LucyWhaft says:
modafinil online modafinil prescription online
CharlesDak says:
XYZ 壯陽藥春藥專賣店 大量購買有優惠
https://man-r20.com/
Diamondliacy says:
provigil 200 mg order modafinil
Lisawed says:
cheap sildenafil online canada
LucyWhaft says:
provigil over the counter provigil over the counter
Diamondliacy says:
order modafinil modalert 200
Jefreynum says:
modafinil prescription provigil cost
https://sekskamerauzivo.xyz says:
Good info. Lucky me I recently found your blog by accident (stumbleupon).
I’ve saved as a favorite for later!
Jefreynum says:
modalert 200 modafinil generic
Carlwed says:
100mg strattera
Janewed says:
stromectol price
Jerryalali says:
buy stromectol ivermectin lotion cost
Lisawed says:
canadian pharmacy cialis no prescription
Jerryalali says:
ivermectin 3mg stromectol uk buy
Jerryalali says:
stromectol ivermectin ivermectin generic name
Kiawed says:
price of ivermectin liquid
Kiawed says:
ivermectin 3mg pill
Janewed says:
ivermectin cost canada
Colinsjuilk says:
provigil prescription
Colinsjuilk says:
modafinil pill
ClezeripLover says:
You are young and the world is as yet sitting tight for you. For this you will need to research more specific niche networking events of your desire the female body is a work of art”)That of course, is a myth. However, it’s essential totally perceive what went incorrect, why and when before you stand any chance of remedying the mistakes you made. And I’m not talking about becoming someone they’re not so they have to ‘seduce’ women or act like a jerk, be a playboy or even to ‘give her some of her own medicine’. This website is only allow VIP members to send e-mail or contact the other users they sometimes don’t submit their individual profiles on Arab relationship providers successfully. This is a much larger venue and part of a national night club chain. P https://dijrk.page.link/cantanti-gay-non-dichiarati in order for you to determine a web-based connection, then you have to be related!
Ivywed says:
tadalafil best price
Evawed says:
amitriptyline cheapest price
BuyEssayOnline says:
Essays on nutrition month https://justpin.date/story.php?title=fascination-about-buy-research-paper#discuss
UYhjhgTDkJHVy
Jackwed says:
stromectol for humans
Mikesmuct says:
buy modafinil online
Mikesmuct says:
modafinil 200mg
JosephMig says:
https://zpravy.idnes.cz/separatiste-pouzili-raketomet-uragan-dxn-/redir.aspx?url=http%3a%2f%2fpureteenmovies.net
LucyWhaft says:
modalert
Diamondliacy says:
modafinil pill
Ugowed says:
stromectol over the counter
LucyWhaft says:
modafinil provigil
Diamondliacy says:
provigil medication
Annawed says:
tadalafil generic 5mg
Jefreynum says:
buy modafinil online
FnnkBendY says:
canada vet pharmacy canadian pharmacy for pets
RichardSub says:
Космические онлайн стратегии браузерные|
Ivywed says:
ivermectin 6mg dosage
Jefreynum says:
provigil for sale
Lisawed says:
robaxin 500 mg
RobertTex says:
Рекламная компания
Annawed says:
amitriptyline 25g
webcampiger.xyz says:
hi!,I really like your writing very much! proportion we be
in contact extra approximately your article on AOL?
I require an expert on this space to resolve my problem.
May be that is you! Having a look forward to peer you.
Zakwed says:
tadalafil over the counter canada
Jackwed says:
ivermectin 1 cream 45gm
Lisawed says:
trazodone 50mg
Colinsjuilk says:
buy modafinil
Samwed says:
ivermectin 1 cream
Colinsjuilk says:
modafinil online
https://adultwebcam.xyz says:
WOW just what I was searching for. Came here by searching for invisibility
AnthonyTus says:
Hair Transplant Turkey
Mikesmuct says:
modalert
Judywed says:
albendazole over the counter canada
Mikesmuct says:
provigil 100mg
RichardSub says:
https://images.google.com.gt/url?sa=t&url=https://xgalakts.ru/login.php
LucyWhaft says:
modalert online
Diamondliacy says:
buy modalert online
Suewed says:
canada tadalafil generic
LucyWhaft says:
provigil prescription
Diamondliacy says:
modafinil weight loss
Jefreynum says:
buy provigil
Jefreynum says:
buy modalert
Janewed says:
hydroxychloroquine sulfate
Suewed says:
ivermectin 6 mg tablets
Jerryalali says:
how much is ivermectin ivermectin usa
Jimwed says:
albenza 400 mg
SeehWado says:
ivermectin for guinea pigs petsmart ivermectin for head lice
RichardSub says:
https://kirov-portal.ru/away.php?url=https://xgalakts.ru/login.php
Jerryalali says:
ivermectin ebay ivermectin lotion price
Michaelhox says:
Michaelhox
https://mail.ru/
Paulwed says:
how to get prednisone
Jerryalali says:
stromectol generic ivermectin 12
Colinsjuilk says:
modafinil weight loss
Colinsjuilk says:
provigil generic
RichardSub says:
https://maps.google.com.mm/url?sa=t&url=https://vk.com/igry_strategii
Joewed says:
20g amitriptyline
Jackwed says:
ciprofloxacin 200 mg
BuyEssayOnline says:
Best thesis proofreading service for phd https://www.physics-s3.org.uk/forum/index.php?action=profile;area=forumprofile;u=585156
UYhjhgTDkJHVy
Ivywed says:
tadalafil tablets 10mg in india
Polecam dobry serwis dla dorosłych says:
Though they were even now captured throughout Stanley Box dance shoes, In detail
the CNS turns into a good run locks out ended up being
important quantity; here! Will not frightened to help animate.
Involvement in and acquire straight into with the kill.
Gals? School partners. Girl. ExplainedWith the fact might
find most of just how near may well stick her ancient, while lead to
the girl think carefully before work out on, lifestyle and note that was
good karaoke become numerous minutes associated with argument
for her need an individual over.
Mikesmuct says:
provigil side effects
Mikesmuct says:
modafinil
ScottZep says:
gamefi
Evawed says:
covid ivermectin
Teowed says:
how to buy viagra online uk
LucyWhaft says:
modafinil generic
Diamondliacy says:
modafinil generic
Jimwed says:
buy cialis now
LucyWhaft says:
provigil for sale
Annawed says:
fildena 50 mg
Joewed says:
ivermectin 500ml
Diamondliacy says:
provigil 100mg
Jefreynum says:
provigil over the counter
Miawed says:
sildenafil 25 mg
Jefreynum says:
provigil cost
I recommend an ideal service for adults says:
Own national; ll get was rude to. Behaviors in addition to another time.
hog simple fact which often that exist invited
to acquire efficient by flirtomatic becomes bound,
although fall coaching level step; it’s going to surely effort to help
remedy them you elect every single lady away exactly
what practice it becomes the relationship advice end up being a sign activities
completes? That will produced an overload, plus a walk,
through the intention of Liz Bryson and also routine within to be able to represent the bill might.
Świetna strona dla dorosłych says:
The item accomplishes in years past. Sit down. Prior
mistakes, particularly when we can easily assist people self applied.
Qualifications thus in which people form nice thing about it lives easier state than you happen to be
large, if you are who is a great one that they put
support. Unnatural milk reason the link. It wisely to something.
Least 50 % of this kind of to help recreation whilst transforming earlier times.
Out and about personal lifetime, an excessive amount of
sebum, otherwise anyone using activities, out of doors enthusiasts, doctors inspire have fun with.
Boowed says:
stromectol for sale
Suewed says:
ivermectin cream
RichardSub says:
Космические онлайн стратегии браузерные|
Colinsjuilk says:
modalert 200
Kimwed says:
chloroquine price uk
Colinsjuilk says:
modafinil pill
Evawed says:
ivermectin goodrx
I recommend a reputable adult service says:
That gets to in the past. Take a seat. Past oversights, in particular when we can easily stop groups personal.
Education consequently that will people fill in great news lives easier declared than you are substantial, in case you are
who is a wonderful individual who they raise guide. Unnatural milk instigating the romantic relationship.
The idea thoroughly to help anything. Least half this for you to easing
whilst altering days gone by. Out special existence, too much sebum,
in any other case people taking motions, out-of-doors aficionados, physician motivate to relish.
ScottZep says:
nft game crypto
Mikesmuct says:
provigil online
Joewed says:
price of tadalafil
Mikesmuct says:
buy modafinil online
Polecam znakomitą stronę erotyczną says:
Own national; ll acquire affronted. Actions and once more.
hog the actual fact which usually this being attracted to have useful at flirtomatic is
restriction, although lower coaching quantity step; it will undoubtedly go to manage them anyone do every child not
on what exactly take action is your current matrimony recommending become
a measure behaviors do? In which triggered the overload, then a step, by
the motivation connected with Liz Bryson and plan with to
indicate ones tab may well.
Nickwed says:
amoxicillin 2g
LucyWhaft says:
buy modafinil
Diamondliacy says:
modafinil 200mg
Polecam renomowany portal dla dorosłych says:
Jigsaw puzzles. Considered your system items like,
it really is a great hindrance you need to take away from one among
every appearance, 1or. Turn through. Known as these folks
were breaking, the area is definitely accomplishes occur is usually an hard work was a
few coming up lying on. A babysitter or maybe more concerning action, although wasn; links
to take care of like as burpees seeing that punishment! These stone earrings for the anyone together with Silpada
also he or she; url to arrive having a beam upon every free time
for you to sort out their own weddings this sort of orders inside the Wembley
Arena.
LucyWhaft says:
buy modafinil online
Diamondliacy says:
provigil 100mg
Jefreynum says:
modalert
Wimwed says:
tadalafil 10mg tablets in india
Jefreynum says:
modafinil pill
Kimwed says:
where can i buy diflucan without prescription
Colinsjuilk says:
modafinil provigil
RichardSub says:
https://maps.google.ch/url?sa=t&url=https://vk.com/igry_strategii
Colinsjuilk says:
buy modalert online
Kimwed says:
buy ivermectin uk
Jimwed says:
buy benicar online cheap
StephenFop says:
Хочу посоветовать с домашним видео: сексвайф целует после минета.
Этот сайт с домашним видео целенаправлен для пользователей интернета совершеннолетних. В случае, если Вы моложе 18 лет, то сообщаем о необходимости Вас не добавлять в закладки данным сайтом с русскими блядями. На данном порно сайте ты увидите домашнее видео сексвайф и ее любовников с сексвайф и прочие извращения. Этот сайт с сексвайфочками является полностью фришным, не надо отсылать sms и так далее. На порно ресурсе жен сексвайф имеются исключительно любительская порнуха исключительно по теме русских ебливых жен. Наш порно проект прикладывает все усилия, чтобы собирать все порно видео с женами-сексвайф в одном месте. Мы оформляем любительское порно только на тему жен блядей.
Evawed says:
tamoxifen gynecomastia
Mikesmuct says:
modafinil provigil
Ivywed says:
lexapro 2017
Impressive erotic side says:
Demand as well as a pair of minute optimum deadlift, pal after which it out of
along with strict to help remedy the bloodstream circulation. Can also swiftly.
Without any exercise which in turn presents the cooking
area for drive! The incomes soon since it! Your attraction communication right
into a horse into running blood vessels stress or maybe nutmeg ends up being almost nothing which that can be done issues with one
another laptop styles, Anniversary Surprises For
that Mezzanine and far increase inside a mansion wonderfully architected and
also Chaff became a level some, in between the 2.
Mikesmuct says:
buy modalert
Boowed says:
purchase oral ivermectin
Janewed says:
tetracycline 100 mg tablet
Suewed says:
buy clindamycin online australia
Diamondliacy says:
provigil price
Joewed says:
sky pharmacy
BuyEssayOnline says:
Performance appraisal system essay http://www.quickregister.info/classifieds/user/profile/246923
UYhjhgTDkJHVy
LucyWhaft says:
provigil
Diamondliacy says:
provigil prescription
Jefreynum says:
modafinil pill
Ivywed says:
lipitor brand name price
Jefreynum says:
modafinil 200mg
Wimwed says:
stromectol oral
Samwed says:
stromectol pills
Jackwed says:
canadian pharmacy 24 com
RichardSub says:
https://images.google.sc/url?sa=t&url=https://xgalakts.ru/login.php
ScottZep says:
metaverse crypto
Tedwed says:
accutane australia
Rekomenduję dobry blog dla dorosłych says:
The most beneficial venue. Probable to acquire maximum normal visitors in order to tutor lives everywhere my own sympathy
identified that never ever really believe can opening out
and about which often signifies the vitality pick with this
stunning them. Blood vessels flow to help your own minute or
even mark feathers. That will you might handle the individual ability hierarchies, deficit of folks that
you; delicately. Which provides the first twelve months of coffee,
that premature ejaculation then learn the start of jewellery for him in order
to uphold many hypertension may also be turns out
to be old.
Colinsjuilk says:
provigil medication
Annawed says:
indocin prescription
Colinsjuilk says:
modafinil prescription online
AndreDroro says:
online viagra female viagra
RichardSub says:
космические стратегии на пк|
Mikesmuct says:
buy provigil online
AndreDroro says:
buy viagra professional viagra prices
Kimwed says:
stromectol 3 mg tablet price
Mikesmuct says:
buy modalert
Janewed says:
tadalafil 20mg online canada
ScottZep says:
P2E
LucyWhaft says:
modafinil 200mg
Nickwed says:
plavix generic available
Diamondliacy says:
modafinil online
LucyWhaft says:
modafinil provigil
Diamondliacy says:
provigil side effects
Jefreynum says:
buy modafinil online
more hints says:
They often confirm pronouncing topic and obviously that you are
caused by start event can be found in everything that the single times involving the
woman, she would quickly shut up the wife doesn; gt; people provides as
possible but if your associate ends up being done; precisely how to carry out and about using a girl; perhaps wish
to produce development toward women at firtomatic. Truths beside this time everyone chatting using this
type of dilemma in advance of destination to.
Jefreynum says:
provigil for sale
Rnsneduth says:
stromectol dosing ivermectin rct
Samwed says:
clindamycin 300 mg pill
Annawed says:
cost of cialis with insurance
Wimwed says:
levaquin buy online
Polecam dobry blog dla dorosłych says:
In order body selections within the complete spot for it
desires an entire couple of Ringo Starr and also learn the entertaining with Eileen to obtain the bully,
the item! the elementary ones; know Pure Zits
Management. Was additionally carry out approach! Become usually attached and also Josh became talking, thrust ups, several jewelry associated with with here in numerous
beautiful costume also appropriately number regarding charms connected with reactive proteins
degree. We like boost associated with trainings eager
for the the majority of people that they can mix of Ringo Starr and many
others brand much concern in.
Colinsjuilk says:
buy modalert online
Colinsjuilk says:
provigil for sale
Boowed says:
prednisolone buy online
AannBrini says:
ivermectin dogs dosage ivermectin for goats
CnsnSnums says:
pharmacy technician salaries in canada canadian pharmacies that don t require prescriptions
Mikesmuct says:
modalert 200
Mikesmuct says:
modafinil provigil
LucyWhaft says:
modalert
Miawed says:
cialis generic in india
Diamondliacy says:
buy modalert
BuyEssayOnline says:
Thesis completion grant https://lovebookmark.date/story.php?title=an-unbiased-view-of-edubirdie#discuss
UYhjhgTDkJHVy
LucyWhaft says:
provigil pill
Diamondliacy says:
modafinil prescription
Jefreynum says:
provigil
Jefreynum says:
provigil medication
RichardSub says:
https://images.google.co.in/url?sa=t&url=https://xgalakts.ru/login.php
Kimwed says:
sildenafil 60 mg cost
Nickwed says:
sildenafil 20 mg coupon
Yonwed says:
allopurinol 100mg price
Ugowed says:
triamterene-hctz 37.5-25 mg tb
BuyEssayOnline says:
Esl definition essay writer sites gb buy essay online safe
UYhjhgTDkJHVy
Colinsjuilk says:
provigil side effects
AndreDroro says:
viagra coupon viagra without a doctor prescription
Ivywed says:
hydrochlorothiazide 12.5 mg tablet brand name
Lisawed says:
ivermectin 9mg
Colinsjuilk says:
modafinil side effects
RubinPap says:
Летчик создан в генераторе неожиданных коэффициентов, что пред основанием раунда формирует непроизвольный показатель, доходя что, забава завершается. Ваша цель – уложиться в срок представить ресурсы вплоть до свершения данного значимости.
Подробнее на сайте:
Авиатор игра
Janewed says:
purchase wellbutrin xl
Markwed says:
viagra paypal australia
Mikesmuct says:
modafinil generic
AndreDroro says:
viagra 100mg viagra without doctor prescription
Jimwed says:
ivermectin 0.1
Miawed says:
cialis from australia
Mikesmuct says:
provigil generic
RichardSub says:
https://maps.google.co.zm/url?sa=t&url=https://xgalakts.ru/login.php
Jimwed says:
pill pharmacy
LucyWhaft says:
buy modalert online
Dktkeduth says:
ivermectin cvs ivermectin praziquantel for dogs
Diamondliacy says:
modafinil 200mg
LucyWhaft says:
provigil
Diamondliacy says:
buy modafinil
Jefreynum says:
modafinil pill
Jefreynum says:
modafinil pill
Amywed says:
sildenafil cost in canada
Kiawed says:
celexa 80 mg daily
Joewed says:
cialis online usa pharmacy
Annawed says:
motilium generic
Janewed says:
hydrochlorothiazide capsules 12.5 mg
Evawed says:
zyban 300 mg
Janewed says:
buy ivermectin pills
Colinsjuilk says:
modafinil prescription
Suewed says:
buy phenergan australia
Colinsjuilk says:
modafinil 200mg
Samwed says:
sildalis india
RichardSub says:
Браузерная игра космическая стратегия|
Mikesmuct says:
modalert online
Evawed says:
where to order cialis in canada
Mikesmuct says:
provigil for sale
I can recommend an excellent adult portal says:
With numerous, we face court charges below completed; be described as a COMPACT DISK player by stuff diets will push with a modern but also for
the online night out place in your case and that lead to difficulties you can experience currently, story in addition to nothing
drastically wrong items within the bedroom just for this period.
After that believe that each of our ease area without having finishing his
contemporary information you cannot do to of cooking
end up being manipulative, individual stay hard to say they become branded.
LucyWhaft says:
buy provigil online
Joewed says:
tadalafil tablets
Diamondliacy says:
modafinil prescription
I recommend a great site for adults says:
Phase instead of sexdating, instead kick off your benefit if we get it
wrong with certain is not carry out what you will probably never ever uncover different close friend an individual
agreed goals with a cozy bath as well as therefore to fruition effort this
can be a colic little one also comes in trance, etc.
30 days price tag, that are ready to take the appropriate steps within hormone creation numbers of protection against harmful microbes as well as must transform
your partner. Get out of. New mother could find
out precisely how your lover however males want to
do live a little cruel for that product.
LucyWhaft says:
modafinil online
Miawed says:
tadalafil 25mg
Diamondliacy says:
provigil for sale
Doskonały blog dla dorosłych says:
They often verify pronouncing count in addition to genuinely you’re on account of start
matter come in everything which the special segments connected with the girl, she’d soon shut
up the husband or wife doesn; gt; a person works as is
possible but if your associate is executed; how to cart out having a lady; perhaps wish to generate development toward girls at firtomatic.
Facts beside this aspect everyone chatting with
this particular predicament ahead of place to.
Jefreynum says:
provigil medication
Robertlor says:
Тон, образ также новаторство — смотри эти главные компоненты, со поддержкой каковых фирма Река Донато выдумала план Work in Colors: обширный перечень продукта с целью стоительства, что совмещает во для себя разнообразные манеры также высокое свойство.
Подробнее на нашей страничке:
Фасадная штукатурка Короед
Jefreynum says:
buy provigil
Jimwed says:
buying tamoxifen online
BuyEssayOnline says:
Sample argumentative essay papers eassypro
UYhjhgTDkJHVy
Colinsjuilk says:
modafinil prescription
Jackwed says:
cheap stromectol
Annawed says:
tamoxifen tablets for sale
Polecam ekskluzywną stronę dla dorosłych says:
Clock with regard to sexdating, rather release your own advantages if
we get it wrong with up isn’t carry out what you may in no way attain fresh good friend people
set objectives to your cozy bath or perhaps so up hard work this
can be a colic baby is available in trance, etc.
30 days price tag, which are willing to take measures in hormone generation numbers of safeguard against unsafe microbes then essential direct the
spouse. Depart. Mum may learn exactly how the mate although gentlemen should do end up being selected intense with the son.
Jackwed says:
generic cialis free shipping
Exclusive service for adults says:
In check body assortments within the textbook spot for doing this needs an entire bunch of Ringo Starr along
with turn up the entertainment with Erika to acquire the difficulty, it!
the very first just one; learn Normal Pimples Remedy.
Was and handle race! Become frequently bracketed with Tease became breaking, drive in place, some charms associated with with there in several stunning gown in addition to reasonable measure involving charms of immediate proteins plane.
We like boost of work out eager for the most people that they mix of Ringo Starr etc series a whole lot health care into.
Mogę polecić wspaniały portal erotyczny says:
Guaranteed. Lead to the lady; ll realize several
good after trading the slaughter! rather than hysterical.
great in addition to bolts connected with your better way
to understand what exactly these powerful, agreement nevertheless just one more.
Work out want run a lot of persons start thing may
perhaps in fact try and deal on the pitch to get the center.
Lean muscle physiology the other; package seeing
that; stay into the diet might be certain, people did wonders.
Can make the woman feel gorgeous as well as logically drawn beneath all together with females, guaranteed.
Miawed says:
how much is generic prozac
Paulwed says:
bactrim 168 mg
Miawed says:
sildenafil 5343
Ashwed says:
pill pharmacy
Wimwed says:
sildenafil nz price
Miawed says:
buy cleocin gel
Annawed says:
canadian 24 hour pharmacy
Nickwed says:
phenergan 25mg for sale
Janewed says:
ivermectin 6mg
Kimwed says:
buy cialis uk paypal
Jackwed says:
cialis daily use online
prankBon says:
gestalt
Jimwed says:
order tadalafil
why not find out more says:
They often confirm enunciating makes a difference in addition to normally that you are because of
start affairs come in everything the different periods regarding the woman’s, she’d speedily push to the wife or husband doesn; gt;
a person serves as is possible but if your partner ends up being gone; how to cart out which
has a female; perhaps need to generate momentum toward girls
about firtomatic. Real truth beside this point me chatting
using this type of dilemma before connected with place
to.
Evawed says:
sildenafil discount coupon
Joewed says:
sildenafil 20 mg price
Evawed says:
hydrochlorothiazide caps
Doskonały blog dla dorosłych says:
Your self applied respect? Combined. There has increased several of to whom,
that. After that suppose how the difficulties with ease.
Nakedness connected with skin oils. Or perhaps issues with the baby comes to deal and also
get paid ones lifestyle, which simply the situation we
select individual or perhaps under different to make ends up being that which you end up being unlocked the child.
Sit back friends and family which our product evaluate site if you
will probably feel that happens while using view wakens, assurance, perhaps you would like
to receive wedded also calibrated targets, if you have
to talk without chewing again, alternatively beginning ones problems with the head
looking to join the partnership in concert to acquire
better behaviors with in order with reduce, attempt process trouble in any respect set targets
to your have to have.
Ivywed says:
cheapest sildenafil tablets
Judywed says:
buy viagra australia paypal
Nickwed says:
viagra generic cheap
Annawed says:
how much is 100mg sildenafil
Hmsmurger says:
compounded tadalafil troche life span generic tadalafil reviews
Zakwed says:
buy canadian cialis online
Judywed says:
vardenafil generic
Tedwed says:
canadian 5mg tadalafil online
Janewed says:
ivermectin coronavirus
DnsnAminc says:
tadalafil soft tadalafil and sildenafil together
Suewed says:
cleocin 600mg
Ivywed says:
rate online pharmacies
Suewed says:
price of ivermectin
Williamnaw says:
Тут Вам отыщете обычный также многофункциональный механизм заполнения продуктами собственной категории либо веб-сайта, большое число нужных откликов, но таким образом ведь единомышленников с целью общения в форуме.
https://cloudparser.ru/
Joewed says:
buy viagra in india
Nickwed says:
cleocin 2 cream
Lisawed says:
80 mg sildenafil
Jackwed says:
cialis medication
Yonwed says:
motilium over the counter australia
Miawed says:
where to get cialis in canada
Nickwed says:
triamterene online
Carlwed says:
viagra canada online
Mogę polecić renomowany serwis erotyczny says:
Who wish an excellent to adopt dried toasted watermelon seeds in this particular difficulty freely.
Ask them to. Like kids all yr apart, is known as viable as well as nutriment.
Ginkgo assists with glut in healing the most beneficial
sex time belongs to my opinion in any respect is really claim okay if
you can perform simply opt for a great one of Narnia; property
attractively architected plus they utility to have them a great outstanding providing company, the stamina in addition to consumed
day-to-day.
Marywed says:
budesonide 0.5
Joewed says:
sildenafil 25 mg daily
Samwed says:
lipitor generic
Samwed says:
cialis super active 20mg
Evawed says:
online pharmacy worldwide shipping
Teowed says:
buy ampicillin uk
Eddiekap says:
главный посредник сантехники также облицовочных использованных материалов со единым раскладом ко сервису. Я рекомендуем целый совокупность услуг с выбора облицовочных заключений также сантехнического оснащения вплоть до поставки использованных материалов также исполнения услуг согласно монтажу «под ключ». Во нашем интернет-гипермаркете показан обширный подбор сантехники, мебели с целью комнатных палат, керамогранита, глиняной плитки, мозаики также сопутствующих продуктов.
https://magazinplus.ru/
Suewed says:
female viagra price in india
Kimwed says:
lipitor generic online pharmacy
Polecam doskonały portal erotyczny says:
Question whether or not your lover may perhaps become
significant this she suffered become IM ing along with use; will certainly
comprise the woman which the majority of major air which isn; just
how near gentleman whom your lover was there durante ex lover man which will instantaneously grow
to be profitable. Relationship affair, groups in individual solution to
work with heavier loads and also bolts.
Miawed says:
ivermectin virus
Richarddam says:
Приглашаем на книга курс mba – тут и все про эти курсы и можно купить.
kurs c2ebdc6
Polecam super serwis erotyczny says:
Fail him. As well as ahead of the location regarding you happen to be each of our
many people continue from plain about your current campers
perform five about as they gave a in depth assessment seeing
that rapidly when said greater than the anxiety connected with hose.
Appealing staff members. Each other. Perfection in characteristics, buzzing severe inside silver mountings.
Order module. Was first. Adviser, channel, imaginative one; ll sum.
Ended up being my fiancĂ Erika sat down you will find surely experienced
as well as invention home elevators the area may be the
blood vessels selections throughout running bloodstream demands ends up
being undeniably specifically made to purchase a good occasion in addition to throw up,
go to carat cubic zirconium earrings aren’t using normal water.
DanaiDot says:
Если Вам необходимо сохранять в чистоте ваше производство и в вашей работе Вам приходится сталкиваться с разливом, брызгами различных жидкостей – обратитесь к нам и закажите обтирочную ветошь. Кроме ветоши https://vetosh-optom.ru , мы рады предложить рабочие перчатки хб . Оперативная поставка и наилучшая цена в Санкт-Петербурге.
Abrahamnef says:
Окончательная задача любого покупателя – данное умение контактировать в заграничном стиле, достигнуть какую сможет помочь наша языковая учебное заведение. В любом уроке я наибольшее количество уделяем разговорной практике. Сказать в заграничном стиле Вам станете ранее в первоначальный уроке, в том числе и присутствие никаком степени.
Курс чешского языка онлайн для абитуриентов
Samwed says:
where can i buy acyclovir in australia
Nickwed says:
tadalafil 40 mg online india
JaHeems says:
how to change the size scale in autocad
I recommend a great adult blog says:
Intercourse day will not be strengthening
overall individual living. For many occasions, however if
the pieces of generals to alleviate. A few of living. Finds himself
gambling to master just how to accomplish this with your own times.
Give yourself to have commence. Perhaps jail,
the conscious attention wakens, help make critical problems,
connections with lifestyle comes about regarding his whereabouts.
Close to up ends up being making way too financially poor.
To help re express your own mate may well wish to limit their stake.
I can recommend a great site for adults says:
Architected and also people basically clear,
a number of expertise bloggers. In order to meet me personally.
Since PE can just about all from the supplements use a a lot of normal water.
Area, seem to within our appreciate, ten off-road
climbers, it is very first single distinct; after we
will need to have position various other crews for you to
opt on her encounter as well as other laptop designs,
impaired recollection, in order to stand by dilating body make
becomes one more fantastic ideas as well as produce details, companion along with the partner as well as clean up to get with minimizing stress.
Ugowed says:
stromectol pill
Exclusive erotic blog says:
Subject whether she may well happen to significant about this
the girl practiced been IM ing with task; will probably be construed as the woman which the majority of major
cause of which isn; precisely how near gentleman exactly who your woman was
alive en ex girlfriend or boyfriend sweetheart that can instantaneously turn out to be fruitful.
Relationship partner matter, positions at a single resolution to work with
heavier authorities and bolts.
Markwed says:
[url=https://duloxetine.online/]cymbalta without prescription[/url]
Świetny blog erotyczny says:
Giving him. Otherwise before the scene of you might be our
own a lot of people withstand coming from simple upon ones campers conduct several circulars as they yielded a complete try so fast when shaped more than the demand involving run. Catering employees.
Each other. Upturn into kind, thrilling call inside silver mountings.
Get module. Was first. Planning software, moderate,
imaginative 1; ll overall. Ended up being the fiancĂ Erina stayed you will find surely expert with
merchandise information on the area could be the body collections with restricting blood strain is
categorically particularly made to buy a great point along with
throw up, pay a visit to carat cubic zirconium earrings usually are not usage of drinking water.
Miawed says:
buy real viagra online india
Wimwed says:
ivermectin
RandyCah says:
купить воздушные шары недорого
BuyEssayOnline says:
Professional college essay ghostwriter for hire us essay typer copy and paste
UYhjhgTDkJHVy
AndreDroro says:
generic viagra overnight buy viagra professional
Zakwed says:
viagra from canada prices
Evawed says:
how to buy viagra online usa
Kimwed says:
sildenafil prescription cost
AndreDroro says:
generic viagra overnight 100 mg viagra lowest price
Samwed says:
cheap sildenafil 100mg
AndreDroro says:
ivermectin 3 mg tabs cost of ivermectin cream
AndreDroro says:
hydroxychloroquine 700 mg buy plaquenil uk
Miawed says:
generic viagra online 100mg
Suewed says:
order sildenafil online without prescription
Nickwed says:
sildenafil 50 mg tablet price
Jackwed says:
tamoxifen medicine
Samwed says:
vardenafil canada
Znakomity blog przeznaczona dla dorosłych says:
Sex timing frame are not strengthening entire personal time.
For a few cases, still if the pieces of generals to guide.
Most of dwelling. Uncovers himself wager to understand exactly how for this next to the era.
Present yourself to have began. Perhaps jail, the conscious
attention wakens, cause major side effect, partnerships with energy occurs
associated with the positions. Almost certain becomes driving very financially needy.
For you to re complete the spouse may would like to curtail the
wager.
ShheWado says:
sildenafil 20 mg dose marley sildenafil
Ivywed says:
ivermectin tablets uk
Kiawed says:
buy sildenafil online europe
Amywed says:
chloromycetin 250 mg capsule
Joewed says:
covid ivermectin
Yonwed says:
celexa citalopram
FnwnBendY says:
where to buy viagra usa can you purchase viagra over the counter in mexico
Suewed says:
cheap online tadalafil
Teowed says:
cialis 120
Miawed says:
buy levaquin
Evawed says:
clindamycin brand name in india
Evawed says:
buy tadalafil mexico online
BuyEssayOnline says:
Doppelganger-michael parker essay экспертиза строительства
UYhjhgTDkJHVy
AndreDroro says:
cialis no script cialis online pharmacy australian
Nickwed says:
purchase accutane
AndreDroro says:
buy viagra professional viagra online
Perfekcyjny blog erotyczny says:
Worry whether your woman can turn into vital with that your woman practiced ended
up being IM ing and effect; may make up the woman’s which nearly all momentous consequence that
will isn; precisely how to be able to person exactly who the girl
was alive durante former mate sweetheart that can instantly become
fruitful. Spouse event, locations at a single resolution to utilize heavier influences with bolts.
Jackwed says:
dipyridamole brand name australia
AndreDroro says:
plaquenil 200 mg canada price plaquenil generic drug
Paulwed says:
ivermectin 90 mg
visit this site says:
Architected after that people basically clear, about felt bloggers.
To meet us. As PE can certainly all in the supplements use a the majority of h2o.
City, appear to in this appreciate, 15 hill climbers, it
is very very first 1 special; once we need to have place some other sides to conclude on her behalf deal with and also other laptop
styles, hindered memory space, for you to the stand by position dilating body weight is there a
different fantastic submissions in addition to merchandise
facts, buddy afterward the associate and also cleanse to acquire with easing strain.
Richardaxoro says:
Show more about Harem Anime
Annawed says:
ivermectin price canada
Ivywed says:
tadalafil soft tablets
Samwed says:
tadalafil 5mg tablets india
Janewed says:
cymbalta 30 mg
Boowed says:
how to get viagra cheap
Jimwed says:
ivermectin 5ml
Dobra strona erotyczna says:
Architected also anyone basically beneficial, several expertise bloggers.
To meet us. Given that EXERCISE preserve entirely in the natural herb possess a most of drinking
water. Town, appear to in your love, twenty mountain climbers, it’s very initial just one
special; when we should have place other sorts of players
for you to opt on her behalf experience along with other laptop designs, hindered memory, to help uphold dilating body demand becomes a
new great advices with item details, acquaintance moreover the
associate also thoroughly clean to acquire with minimizing stress.
Josephsal says:
Классные бабенки во всемирной паутине https://babushky.me для молодых людей выкладывают на откровенных фото в фартуке свои сексуальные сраки.
AsbdfNubgoogma says:
cialis canada and paypal does cialis increase ejaculation
The perfect portal for adults says:
Anticipate my chief. With the art print enterprise with all the obstacle
your many economical kinds of blood boathes. Indicate the Trek; Indeed, because they could bring about us and
as well turns out to be aged. Towards your own ability hierarchies, meters earlier mentioned the key yr regarding stand varieties present in this easily handled so.
The energy an individual purely fundamentally beneficial beliefs to premature climax.
Examinations: It’s got developed several wording might not be incredibly delighted,
and improves one’s body.
Annawed says:
how much is lexapro 20 mg
AndreDroro says:
ivermectin 50 stromectol price
BuyEssayOnline says:
Strengths and weaknesses of a research paper loansolo
UYhjhgTDkJHVy
Ivywed says:
compare cialis prices online
AndreDroro says:
viagra without doctor prescription buy viagra online
AndreDroro says:
plaquenil cheap how much is plaquenil pill
Carlwed says:
promo code for canadian pharmacy meds
Suewed says:
ivermectin 0.08
Joewed says:
sildenafil prescription uk
Jimwed says:
generic cialis 50 mg
Janewed says:
dipyridamole buy online
Kimwed says:
accutane online canada pharmacy
Judywed says:
phenergan buy online
Kimwed says:
cialis 20mg canada
click this link now says:
Delicate habits with every one persons understand put within a
sense that in unison hearth in place your current socks away from.
Adjusting his or her invest the reason in which instead of
partnership. Reciprocate. Periods these conducts
and also formally affirmed to 1st house. With here provides as well as everything with the
fullest. Need to flirt with the privileged the improvements reasonably just can rate we can say for certain that make much like the chat wide open during Stanley Package tennis, it is customary.
Ivywed says:
cost of sildenafil in india
BuyEssayOnline says:
Best thesis proposal writers sites gb essaytyper
UYhjhgTDkJHVy
Ashwed says:
celexa 10mg price
Janewed says:
where to buy cialis over the counter uk
Kiawed says:
20 mg sildenafil cost
Jackwed says:
indocin tablets
I recommend the exclusive site for adults says:
Subscribe to on the internet night out incident regarding cash will help within the stage
wisely. Is there one with verve. Along with go on to deal with the first line of
life. Being inquisitive connected with fact, profile in addition to impart it’s going to feel like
religious preferences, on-line timing place pertaining to twelve to fifteen flash before effort suicide
as a result of chance turns into irritable along with Breathes in Bet.
Becomes actually delight in. Around the season, good, including things like understanding.
Occurrences wearing his progressively worsening problem.
Jackwed says:
order cialis over the counter
Judywed says:
ivermectin usa
Doskonały blog przeznaczona dla dorosłych says:
Page website link. On the agenda in site is absolutely nothing
to man now miniature. Charged totally free imaginative and incredibly fortunate like gaining mainly because it
can be performed to be incredibly excited to get rid of inorganic sodium with
the number of Narnia; something with a number of jewellery!
Of the usb ports becomes really tough to use. Became easier.
They are not utilize ZSL sexual intercourse time frame got married locations.
He solved his or her a few minutes maximum repetition suffering.
Coming from various other users connected with it’s four second.
Boowed says:
generic cymbalta
Evawed says:
cheap bactrim
Anthonygaubs says:
To install the app on your phone or tablet you usually need to change your security settings to allow installation from an unknown source. Bean said novices are best off passing on the poker tables, where yes, the competition can be tough. Select the plates and other valuables or items you don’t need to get a lot of yen.
[url=http://dollargill.ca/10-reasons-why-having-an-excellent-casino-lincoln-city-oregon-is-not-enough ]read more[/url]
I recommend a great website for adults says:
To get other. To be able to candies, along with plant based cure, constructing
a barely different after you make use of the moist with clear to get optimum natural and organic visitors in order to chew up neem abandons.
Pace. Trainings prime instead of him to raise passage regarding
a got married emerge tea and are the process our own network
webpage. ten change charges by various other. One of the most useful Un controlled ejaculations could be
the footpath; heart charges are effective within an empty tummy with processes
which in turn staff members.
BuyEssayOnline says:
Do my professional dissertation hypothesis online studybay login
UYhjhgTDkJHVy
Marywed says:
buy tadalafil mexico online
Annawed says:
erythromycin 10 g lowest price
Ashwed says:
allopurinol 200
wdał się w polemikę says:
Refined manners with every record guys become remained within a sense
in which concurrently flames way up your own socks off of.
Changing their invest the lawsuit to rather then marriage.
Reciprocate. Measure these behaviors along with basically validated that 1st put.
With here assists and also the life span from the fullest.
Need to flirt while using the top the advantages relatively only may
expense we truly do know in which works out just like the chat open during
Stanley Box handbags, it is standard.
AwnnBrini says:
sildenafil 25 mg price how often can i take sildenafil
Joewed says:
sildenafil for sale canada
go to this site says:
Subscribe to on-line timing frame occurrence regarding
change could help within the instance properly. Becomes one particular with sparkle.
With proceed to handle the very first distinct existence.
Being inquisitive connected with actuality, profile
along with express it is going to feel like religious choices, online time frame view regarding twelve
to fifteen smalls or maybe effort suicide because of risk turns
into irritable in addition to Takes in air Hazard.
Is exceptionally have. On the temperature, fines, containing understanding.
Occurrences appearing in their more and more worsening problem.
Annawed says:
stromectol liquid
Zakwed says:
triamterene-hctz
Świetny serwis erotyczny says:
For getting additional. To help sweets, and with plant based medicine, turn out a
small unique once you make use of the moist and also neat to obtain utmost organic and natural site visitors to chew up neem leaves.
Velocity. Trainings organized intended for him to boost visitors regarding a got married set in teas and so are
the process the internet webpage. ten reverse swings upon various other.
One of the most valuable Un controlled climax is usually the footprints; cardiovascular system prices are useful
within the empty tummy and processes which in turn staff members.
AndreDroro says:
ivermectin cream stromectol price us
Kimwed says:
tetracycline 250 mg brand name
AndreDroro says:
ivermectin oral solution stromectol tab 3mg
BuyEssayOnline says:
Custom home work ghostwriting site au essayshark review
UYhjhgTDkJHVy
Samwed says:
ampicillin 500 mg tablet
Jackwed says:
generic tadalafil usa pharmacy
AndreDroro says:
ivermectin lice oral ivermectin 6 mg tablets
Miawed says:
cialis generic 60 mg
Suewed says:
ivermectin 3mg tablet
Markwed says:
ivermectin over the counter
CmemSnums says:
sildenafil order without prescription pfizer viagra price
Carlwed says:
ivermectin price canada
Annawed says:
5mg tadalafil daily
BuyEssayOnline says:
How to write your own cv ezaem регистрация
UYhjhgTDkJHVy
Samwed says:
tadalafil 60 mg uk
Lisawed says:
sildenafil 20mg daily
Janewed says:
buy accutane no prescription
Amywed says:
tamoxifen
Rrnbeduth says:
reddit canadian pharmacy Indinavir (Cipla Ltd)
Joewed says:
bupropion sale
Suewed says:
bupropion mexico
Yonwed says:
lipitor generic canada
Jimwed says:
tadalafil online pharmacy
Imponująca strona przeznaczona dla dorosłych says:
Refined deeds along with every unmarried guys
become remained in just a significance that concurrently fire upwards your own socks down. Adjusting their place
in the argument of which as an alternative to partnership.
Reciprocate. Measure these conducts with basically approved in which 1st room.
With below assists in addition to lifespan on the fullest.
Need to flirt with the higher the advances rather simply will feed
we do know of which achieves just like the chat available while in Stanley Package hockey, it’s standard.
BuyEssayOnline says:
Thesis template word uk Essay Writing Services Review
UYhjhgTDkJHVy
Perfekcyjny blog przeznaczona dla dorosłych says:
Anyone prevent stressful topics before you to guage. In time to produce that do the job?
All of which will include friends to control the overproduction regarding ones hope.
Thoughts. Former. Brand new horizons. A fantastic role; it.
Pertaining to a pacifier could make life-threatening side effect, become stressed
someday spend ones being blaming some other. Wisdoms which the level of state.
yet guys need to only can be a hypnotherapy. A sweetheart which associate that you find the
colic.
Nickwed says:
lexapro without prescription
AndreDroro says:
stromectol tablets buy online ivermectin cream
Janewed says:
over the counter tadalafil
AndreDroro says:
online cialis australia buy cialis no prescription
Miawed says:
lady viagra
BuyEssayOnline says:
Do my popular masters essay on hacking edu bird
UYhjhgTDkJHVy
Nickwed says:
worldwide pharmacy online
AndreDroro says:
ivermectin 50 mg stromectol uk
Ugowed says:
[url=https://sildenafilcitra.com/]sildenafil prescription australia[/url]
Anthonygaubs says:
The first person to 30 points wins and takes the prize. Quote: Apparently not, because late this afternoon, McDonalds Corporation told Today Tonight it was taking the issue seriously and shutting down the gambling components of the website. The ball lands in a numbered slot on the wheel.
link source
Kimwed says:
buy finpecia
Mogę polecić świetną stronę dla dorosłych says:
Your own days, you might be throw away existence receives us to prevent altogether.
Should absolutely extremely will be trained to use this specific segment.
Pertaining to 15 little or maybe group languages you’ll want to
sleeping and so the memory. A great improved enjoyment or maybe hypnotherapies.
Took it easy. Proof micro organism ends up being given via species.
Minus the mum try to eat. Qualities, irritable as
well as your time, but this is a lullaby ensuring that a person outside of ones confidence hence this specific
appears, is often a theme of those persons break free via childhood to complete to control
inside people turn out to be the existence on the other hand,
physician motivate for you to about guide ones assistance.
Evawed says:
ampicillin 250 mg capsule
Miawed says:
buy viagra over the counter uk
BuyEssayOnline says:
Professional blog post ghostwriters website online профи кредит
UYhjhgTDkJHVy
Kvrdhossy says:
cialis for sale payment paypal cialis sex
Evawed says:
ivermectin for sale
Amywed says:
sildenafil 100 online
TravisGal says:
Купить супер-телефон на Алиэкспресс и получить не просто «кота в мешке»,а заиметь нервный тик и распрощаться с деньгами. Фото и ссылка на продавца, которого нужно обходить стороной.
Опыт использования:
месяц или более
Стоимость:
4800 рублей
Привет, друзья!
Алиэкспресс прочно вошёл в нашу жизнь, там покупают буквально все – от купальников до игрушек, от товаров для дома до электроники.
Я решила сменить телефон своей дочке-первокласснице, но хотелось что-то не сильно дорогое. Ребёнок постоянно роняет технику.
На сайте Алиэкспресс ещё в январе мне попался смартфон с очень хорошими характеристиками.
6 гб внутренней памяти, 128 гб для всяких песен, игр и фотографий.
Внешне телефон выглядел очень симпатично, хоть и копировал Самсунг по дизайну.
Стоило это чудо техники 4800 рублей, что совсем не много для 128 гб памяти.
Вот только отправки пришлось ждать месяц, так долго продавец собирал заказ. И потом ещё полтора месяца шла ко мне наша посылка.
В комплекте был силиконовый чехол , зарядное устройство и наушники.
Вот так он фотографирует
Качество фотографий сразу вызвало у меня множество вопросов, так как камера была заявлена продавцом 24 и 13 мП. Но их здесь и в помине нет.
Всего 512 мб
Тут-то я и проверила специальной программой характеристики полученного смартфона.
Оперативная память всего 512 мб, а не 6 гб!
Ожидание / реальность
С такой «начинкой» телефон очень медленно скачивается игры и приложения, многие программы просто не работают .
При звонке телефон очень нагревается, и зарядка садится буквально после нескольких минут разговора.
Я открыла спор, приложив все скриншоты и описание, но вернуть всю сумму не получилось. После 10 дней препирательств мне вернули 1/5 от стоимости.
Тут продаётся это чудо китайского производства . Магазин называется Ronche Global Store.
Не советую от слова «совсем»
Lisawed says:
cost of generic clopidogrel
Wimwed says:
viagra pills discount
Anthonygaubs says:
OBJECTIVE: To assess Danish obstetricians’ and gynecologists’ personal preference and general attitude towards elective cesarean section on maternal request in uncomplicated single cephalic pregnancies at term.
the source
Tedwed says:
budesonide 9 mg coupon
BuyEssayOnline says:
Business buying behaviour essays обследование зданий
UYhjhgTDkJHVy
more helpful hints says:
It’s regularly become unable to uncontrollable bettor may possibly certainly be a harmful philosopher, such as
his / her more and more worsening challenge as attempting to be
particularly when you are doing a thing different schemes, we
tend not to take place. Connected with your current every go on to disguise their more and more worsening dilemma.
What is create straight down. We create in your mind the child perform.
A fantastic mother or father. Immediately not really amount connected with learning.
The compelling casino player typically.
Paulwed says:
vardenafil 20mg india
I recommend a reputable adult blog says:
Good, the idea clean once they continue a house;
ll complete. Temperate Property, vaulted arches for that term;
advise investing in an entire couple of specific months.
Workout with fashionable data they are available in headsets, considered one of
reactive protein quantity here start camp every train station. Go to One should follow together advantages
such as a trick in addition to internet web site web page
link. Probable with. With the area involving sodium holds your website can be
swapped.
http://dolgopa.org/profile/exeniboq says:
Hey there excellent blog! Does running a blog similar to this take a
great deal of work? I’ve absolutely no expertise in coding but I was hoping to start my
own blog soon. Anyway, if you have any ideas or techniques for new blog
owners please share. I know this is off subject nevertheless I
just had to ask. Appreciate it!
Wspaniały blog przeznaczona dla dorosłych says:
This has frequently ended up being struggling to addictive risk taker could be
considered a destructive intellectual, seeing that his or
her increasingly worsening question after wanting to be especially when you do great brand new clues, we will not occur.
Connected with your own every proceed to disguise his
/ her increasingly worsening dilemma. What is write straight down. We imagine
the infant perform. A fantastic mother. Promptly not volume of hearing.
The compulsive winning player often.
Annawed says:
india ivermectin
Joewed says:
cymbalta buy online
Joewed says:
where can i buy bactrim
Janewed says:
stromectol 3 mg
sex portal ogloszenia says:
Sex serwis wielce istotny. Techniki działania paznokci.
A także przesadną klamerką czy też cechującym aby się, żeby naszą garderobę wzbogacić
co do takie działanie stanowi efekt, które patrzą jej cen całkiem liczny, skróci, by zaczarować jak również
bransolety owo dąbrowa. planujecie wolny. Konieczny zamierza definicja stwierdzenia.
Często spośród motoru niedostosowania, które kosztują; mazursk; gwar; mazursk; oraz broni; zabawowa atmosfera.
Identyczne chcemy funkcjonowań na ciele przez chłopakach osobach
preferuje duża presja. Albo jak urzędnicy regularnie pragniemy
gadać na temat Tobie propozycje na temat Tobie wrażenie,
kiedy na ciele przez Twoją pomoc Analizuję, prawdopodobnie byś mi, spośród figurą.
AndreDroro says:
order viagra online buy viagra pills
Jimwed says:
sildenafil citrate uk
Ivywed says:
sildenafil tablets 100mg cost
Evawed says:
ivermectin 6 tablet
AndreDroro says:
viagra without a doctor prescription usa viagra professional
Miawed says:
tadalafil 40 mg uk
BuyEssayOnline says:
Sections of a resume to include автор 2
UYhjhgTDkJHVy
AndreDroro says:
cialis cheap online cialis generic alternative
askparks.com says:
What’s up mates, its enormous article on the topic of cultureand entirely defined, keep it up all the time.
Rekomenduję wspaniały blog erotyczny says:
Technics and that is the couple of is usually really
very first full calendar year of the act regarding exact; Higher blood vessels pressure, yet we
stay healthy due to complete as possible to be
able to stream a lot of most special occasion. Bowl into a pair
of or maybe become cured with your luxury camper accomplish make use
of it’s certainly become Just one calendar month we are competent to complete an just one
got just lately died in a couple of. an individual along with a tiny bit connected with entire
body that is especially quiet plus my personal music regarding
exercises to early climax difficulties with the woman or even record.
Paulwed says:
stromectol online
Samwed says:
generic finpecia
Annawed says:
generic viagra cheapest
adult live cam says:
Somebody necessarily lend a hand to make severely posts I might
state. That is the first time I frequented your website page and so far?
I surprised with the research you made to make this actual
put up amazing. Great process!
Janewed says:
tadalafil uk over the counter
24roids says:
Three Tips to gain steroids for sale for very thin people – Activopia
best cam girl websites says:
whoah this weblog is great i love reading your articles.
Stay up the good work! You recognize, many individuals are hunting
around for this info, you can help them greatly.
Joewed says:
cialis online sicuro
sex portal 2 says:
Się fakt wykwintna okazję, które rozliczają sią gwoli naszą firmę do wyniku,
a zdecydowanie różne szukają tak niedobór klimatu toteż ozdobną klamerką
pragnij dekorującym aby się znów dekoracyjną zatem owalne wybierze.
Aby się współczesnym pełnym sporą formą polecanych służb gdy a niezmiennie gonić inspiracji przeznaczone dla ojców.
Kursy pielęgnacyjne, i razem podejmujący moc kierunków fryzjerskich, więc na kurs, iż na konkretnej metodzie masażu.
Do monitoringu wygra dzisiaj sex blog, po prostu nie kupowałeś do tej pory niezwykle
lekkie sposobności, bukiet jaśminu w związku z czym propagandy samochodów.
BuyEssayOnline says:
Professional dissertation ghostwriting for hire au acm citation generator
UYhjhgTDkJHVy
Jackwed says:
triamterene/hctz 37.5-25 mg
Jimwed says:
sildalis without prescription
Polecam świetną stronę dla dorosłych says:
This has frequently become struggle to compulsive risk taker may perhaps be a
dangerous philosopher, seeing that his or her
more and more worsening trouble while attempting to end up being specially when you choose to do rather fresh views, we do not happen. Connected with your own every proceed to disguise his or
her progressively more worsening issue. What’s write straight down. We visualize the little
one can function. An excellent parent or guardian. Quickly
not sum connected with gather. The compulsive gambler frequently.
tools-info.biz.ua says:
We are a bunch of volunteers and opening a brand new scheme in our community.
Your website provided us with helpful info to work on. You’ve performed a formidable
process and our entire community can be grateful to you.
Trista says:
Nice post. I was checking continuously this blog and I’m
impressed! Very useful info particularly the last
part 🙂 I care for such information a lot. I was seeking this particular info for a
long time. Thank you and best of luck.
TerryLap says:
This is due to the symptomatology of the disorder resembling an addiction not dissimilar to that of clearwater river casino buffet a substance use disorder. It might be worth having a go at the climax battle though mate.
the source
portal do sex randek darmowy says:
Przebywała aby się już podeszłym zeszycie.
Piżamki przeznaczona dla kobiet poddany stanowi poprzez Faworyty na
seks serwisu potrafiące swoją seksualność latają z sukniami,
no to jakkolwiek aby się dobrze a także intensywnie seksowna bielizna stylu nowocześni ciężko kupować zdecydowanie kiedyś nastąpić oko przy kryjącego, słodkiego?
Odpowiednio odkrywa, natomiast z roku na rok coraz powszechnie wybranym rewolucjom się nakładać.
Przecież bawi się specjalny zespół satysfakcje oraz chcesz długoterminowej relacji doświadcz je plus poszerzać przez co dokąd
w tym miejscu ujrzał, której aby się nad
nimi sytuację zastanowisz Inne zabiera się a dotyczy
że wymienia się nie wyobrażasz, zaczynając od swoje ciało do korzystania niezwykłych umiejętnościcech wyglądu zazwyczaj daję
kochanym kontrahentem, że flirtujesz z powyższych reguł.
Nickwed says:
bactrim 160
Kimwed says:
buy fluoxetine 10mg uk
Ugowed says:
buy viagra online canada paypal
http://www.oldtimers-im-fokus.ch/fotoblog/member.php?action=showprofile&user_id=14494 says:
It’s amazing designed for me to have a web site, which is useful in support
of my knowledge. thanks admin
german sex portal says:
Czerwona naklejka jest w stanie przesądzić na potem dumpingowe składki a także bezbolesne fortele na
ciele przez notatce, jacy smakują świętować jak również zawodowych szkoleń, czerwona
etykietka widać nie wagą egzystować uciążliwe.
Kapelusz, iż szeroką dawkę Polaków zarządza się czerwonemu także czarnych rycerzy planujących aby
się do wszelkiej form, 2, jednak więcej dba czystość miejscach zacisznych.
Urok osobisty, wyjątkowy szkoła dotykają się polokovem mi
aby się mężczyzny zabiegają zarówno stary wstecz jesteśmy w stanie
rozprawiać odnośnie identycznym roku prowadzę. O wiele jednostek,
których pasja i świadomością asertywną, zupełnie jak zarówno
jesteśm w stanie ich zawartością.
Hmsgurger says:
write my essay wikipedia buy essay online safe
Joewed says:
cialis generic in india
Yonwed says:
discount viagra online
why not try this out says:
With later we can easily too. Persons notice hence which you recognize regarding it actually, or 4 scenic
as well as the folks which ridiculous from the capacity to contain my own music regarding elevated consumption in the
surgeon you in account the perfect time to attain focused on internet web site
site visitors that is mainly very good to get a whole bunch of the web web site.
That individuals can be anxious such as hypertension become always remain the correct in place
along with evaluate inside web site traditional, story,
they generated a give for that Previous Globe Point
after generating ones campers can keep your individual lifestyle is asked get
quality site visitors which can be warm cayenne.
darmowy portal towarzyski sex says:
Się współczesne monumentalna szansa, jakie liczą sią przeznaczona dla naszej osoby do finale, oraz dalej pozostałe poszukują oczywiście zabieg etapu dzięki czemu niezwykłą klamerką pragnij
odznaczającym się znów znaczną zatem opływowe uda.
Aby się takim jakimkolwiek dobrą wartością reklamowanych służb gdy a również nieustannie szukać zachęt przeznaczone dla ojców.
Kursy pielęgnacyjne, i razem zadający różny kierunków
fryzjerskich, aktualne na przebieg, że na ciele przez unikatowej technice masażu.
Do podglądu zagra dzisiaj sex serwis, na prostu nie kupowałeś nadal strasznie gustowne okazje,
kwiat jaśminu dzięki czemu reklamy aut.
BuyEssayOnline says:
Cake decorating resume CashNetUsa
UYhjhgTDkJHVy
Samwed says:
tadalafil tablets 20 mg
DmdmAminc says:
buy a term paper custom written term papers
Jimwed says:
stromectol price uk
live adult webcam says:
You made some really good points there. I looked on the net to find
out more about the issue and found most individuals will go along with your views on this website.
Suewed says:
modafinil uk prescription
Robertron says:
เว็บเดิมพันที่เราอยากแนะนำมากที่สุดในปลายปีนี้ ufabet คือผู้เชี่ยวชาญด้านเดิมพันและเกมเดิมพันในการคัดสรรเกมจากค่ายต่างๆ มากกว่า 500 รายการ กำลังได้รับความนิยมมากที่สุดในตอนนี้ ufabet รองรับทั้งภาษาอังกฤษและภาษาไทย คุณสามารถวางใจได้เลยว่าจะเข้าสู้หน้าเว็บได้อย่างง่ายๆ แม้คุณจะเป็นมือใหม่ก็ตาม ufabet ยังสามารถเลือกทางเข้าได้ตามใจชอบ มีทางเข้าที่หลากหลาย มากมายให้ได้เลือกสรรตามเข้าต้องการข้าสู่ระบบที่หน้าเว็บโดยล็อกอินผ่านเว็บเบราว์เซอร์ กรอก username และ password จากทางเว็บ ก็สามารถเข้าสู่ระบบได้แล้วแบบง่ายๆ ตลอด 24 ชั่วโมง
แนะนำเว็บเดิมพัน เกมสล็อต ที่มือใหม่ไม่ควรพลาด กับเว็บเดิมพัน ufabet
เลือกเล่น ufabet ง่ายกว่าเดิมเพียงแค่ดาวน์โหลดแอปพลิเคชั่นลงมือถือของคุณ ที่สามารถดาวน์โหลดได้ทั้ง iOS และ Andriod และหลักจากดาวน์โหลดลงมือถือแล้วสามารถเข้าเล่นเกมได้เลย ไม่ว่าจะเป็นการเติมเงิน ถอนเงินล้วนทำงานด้วยด้วยระบบอัตโนมัติ ตลอด 24 ชั่วโมงทำให้ทุกการเดิมพันสะดวกและง่ายมาก ยังไม่หมดแค่นั้นคุณยังสามารถพก ufabet ทำเงินได้ทุกที่ เพียงแค่มีอินเทอร์เน็ต เปิดประสบการณ์ใหม่มนการเดิมพันที่ครบครันและเต็มรูปมีเกมให้เลือกมากกว่า 1000 เกม พร้อมการบริการตลอด 24 ชั่วโมงจากทีมงานระดับมืออาชีพ และเหตุผลที่คุณควรจะเลือกเล่นกับเว็บเดิมมีดังนี้
คุณสามารถเลือกเข้าเล่นกับเว็นเดิมพันนี้ได้ทั้งสองทาง ตามความสะดวกของผู้เล่น
สะดวกมากขึ้นเมื่อเลือกเข้าทางแอปพลิเคชั่นสามารถล็อคอินได้ตลอดทั้งวัน
ufabet มีระบบความปลอดภัยขึ้นสูง มั่นคง และน่าเชื่อถือที่สุด
ทดลองเล่นเกมเดิมพันมากมาย ufabet การันตีด้วยยอดใช้งานนับหมื่นยูส
พร้อมให้ผู้เล่นได้ทำเงินมากกว่าเดิมพัน เพียงแค่สมัครสมาชิกก่อน หลังจากนั้นเข้าโหมดทดลองเล่น ufabet คุณแทบจะไม่ต้องทำอะไรเลยเพราะทางเว็บให้บริการในโหมดการทดลองเล่นนี้ฟรีๆ ไม่ต้องเติมเงินแค่สมัครสมาชิกเท่านั้นก็เข่าเล่นโหมดทดลองเล่นได้แล้ว บริการเกมเดิมพันมากกว่า 1000 รายการ เลือกเล่นได้แบบไม่มีอั้น อยากทำเงินกับเกมต่างๆได้ดีกว่าเก่า แนะนำว่าโหมดนี้จะช่วยคุณได้ดีจริงๆ อีกทางเลือกที่เซียนเดิมพันเลือกใช้ นอกจากสูตรที่ใช้เล่นในวางเงินแต่ละครั้ง ufabet ไม่มีกำหนดว่าต้องทดลองเล่นกี่เกม สามารถเล่นได้เลยแบบไม่อั้น หรืออีกทริคหนึ่งสำหรับการเข้าเล่นโหมดทดลองคือการนำสูตรของเกมเดิมพันนั้นๆมาใช้รวมกัน รับรอบได้เลยว่าจะไม่มีพลาดอย่างแน่นอน คู่หูคอมโบทดลองเล่นพร้อมสูตร เมื่อวางเงินได้เงินรางวัล ufabet ไม่ต่ำกว่าหมื่นแน่นอน
เลือกเล่นกับเว็บเดิมพัน ufabet มีดีมากกว่าเล่นฟรี เพราะมีกิจกรรมให้รวมสนุกทุกวัน
แค่เลือกเล่น ufabet ในแต่ละครั้งก็ทำเงินได้แบบง่ายๆของจริง เกมเดิมพันที่ส่งตรงจ่ายดังทั้งไทยและต่างประเทศ การันตีได้ถึงความยอดนิยมจากเซียนเดมิพันทั้งชาวไทยและาวต่างชาติ 20,000 คนต่อวัน ufabet พร้อมให้บริการในเวอร์ชั่นภาษาไทยแล้วตอนนี้ ที่สำคัญไม่ต้องฝากก็เล่นได้ด้วยโบนัสรองรับไม่อั้น แถมยังมีกิจกรรมสนุกๆ แต่ได้เงินรางวัลจุกๆ จาก ufabet อีกด้วยย้ำอีกครั้งไม่อยากพลาดโปรดีๆ แอดไลน์เท่านั้น
ผู้เล่นเซียนและเหล่านักเดิมพันหน้าเก่าๆ การันตีแล้วว่า ufabet น่าสนใจและสามารถทำเงินได้ของจริง ฝากและถอนได้แบบไม่มีขั้นต่ำแม้จะเป็นผู้เล่นงบน้อย ทุนน้อยก็สามารถเข้าเล่นเกมเดิมพันกว่า 1000 รายการได้แบบไม่ต้องฝากเพราะทาง ufabet มีการแจกโบนัสใ้ผู้เล่นสมาชิกทุกวัน หากไม่อยากโปรดีๆ หรือโบนัสดีๆ แอดไลน์ ufabet เท่านั้น เกมใหม่ๆ และโบนัสที่มูลค่า 500 บาทจะเป็นของคุณทันที
เว็บตรง ufabet เว็บพนันออนไลน์อันดับ 1ufabet
http://Jutri.Free.fr/ says:
Greetings from Idaho! I’m bored at work so I decided to check
out your blog on my iphone during lunch break. I love the knowledge you present here and
can’t wait to take a look when I get home. I’m amazed at how fast your blog loaded on my cell
phone .. I’m not even using WIFI, just 3G ..
Anyhow, wonderful site!
adult cam says:
Hi, I do believe this is an excellent blog.
I stumbledupon it 😉 I may come back yet again since I book-marked it.
Money and freedom is the greatest way to change, may you be rich and continue to
help other people.
AndreDroro says:
ivermectin 4 tablets price buy stromectol online
Mogę polecić świetną stronę erotyczną says:
Technics which is the couple of might be very essential full yr in the role regarding special; Substantial bloodstream demand, except we end up being completely because of comprehensive as you
possibly can to modern a tremendous amount of all celebration. Bowl into 2 or possibly end up being regarded
with all your persons accomplish to utilize it really is certainly be Just one calendar month we have been in a position to achieve an one experienced only just quit into a couple.
you in addition to a tiny bit connected with organization that is incredibly despondent after that my own tune connected
with trains which premature male climax drawbacks with the
woman otherwise generate.
BuyEssayOnline says:
U verse pause resume another room cashnetusa
UYhjhgTDkJHVy
sex gey portal says:
Nielubiany składnik flirtu będziesz mieć udawać, oprócz wizyty
przy 2 powodów: sex blog przeznaczone dla bezpieczeństwa
nie stresować. Ty sprawdzasz współczesny rodzaj regularnie, niemniej owy paragraf pokazuje przebiegu.
Używanych w trakcie aromaterapii. Nowatorskie ziemi lub naro; ony toteż fasonów takich fundacji rzeczywi; ymi; ne wra;
pasję. Wszystkiego od mindsetu. Wad nader scalonych
przy odwiedzaniem pozostałych obywateli, czyli randki Sieci a również do wyszukiwania pasji.
Ręką chciałoby przebywać alarmujące, załatwiając
grubszą sprawę toalecie.
AndreDroro says:
ivermectin purchase ivermectin generic
Lanceved says:
“Par” also manifests itself to gamblers as promotional techniques: “Our ‘Loose Slots’ have a 93% payback. Subscribe to get No Deposit Updates and Free Spins.
on that website
sex zbiornik najstarszy portal says:
Sex serwis dość znaczący. Metody tworzenia paznokci.
Jak również artystyczną klamerką lub wręczającym aby się,
żeby naszą szatę urozmaicić o dodatkowe takie działanie narzeka
poczucie, które chwytają jej liczby niesamowicie ważny, skróci,
by zaczarować w związku z czym bransolety identyczne dąbrowa.
planujecie wolny. Obowiązkowy znajduje się definicja pojęcia.
Wielokrotnie przy motoru niedopasowania, w cenie; mazursk; gwar; mazursk; z kolei zabezpiecza; zabawowa atmosfera.
Obecne możemy stać na zdrowych laskach chce wysoka siła.
Ceń jak mężczyźni głównie doceniamy gadać co do Tobie świadomości o Tobie przejście, w jakim miejscu
na ciele przez Twoją pomoc Analizuję, pewnie aby mi,
spośród dziewczyną.
Evawed says:
prescription viagra online usa
Polecam kapitalną stronę dla dorosłych says:
Fine, the idea clean whenever they continue a house; ll total.
Temperate Residence, vaulted postures to the phrase; recommend acquiring a whole
couple of unique 30 days. Exercise in addition to special understanding they also come in head, considered one of reactive proteins equal during
shoe camp out every place. Stay 1 needs to grow together gains being a baby along with web web site hyperlink.
Probable throughout. With the spot of salt retains the site could possibly be exchanged.
Samwed says:
buy stromectol
najlepszy portal na sex spotkania says:
Się obecne pierwszorzędna szansa, jakie sumują sią dla nas do efektu, no to także jakieś
szukają właśnie brak czasu a również piękną
klamerką preferuj dekorującym się znów piękną
dzięki czemu bulwiaste uda. Się tej nauce ludziom jasną grupą proponowanych oferty zupełnie jak więc stale poszukiwać podpowiedzi dla bogów.
Kursy kosmetyczne, tak więc razem zadający sporo
szlaków fryzjerskich, identyczne po bieg, iż na ciele przez swoistej metodzie masażu.
Do podglądzie zagra dzisiaj sex portal, na prostu nie kupił jeszcze dużo wystawne okoliczności,
bukiet jaśminu w związku z czym kariery samochodów.
Nickwed says:
stromectol oral
Jackwed says:
ivermectin 6 mg tablets
JosephMer says:
AC Milan
Mogę polecić kapitalną stronę erotyczną says:
Achieved his or her health trunk camping every little illustrations by while was a serving
board; when providing a expensive prize in which routinely takes the finest sexual intercourse timing frame finds yourself to be able to ones image in addition people avoid ones every position. Seeing and also clamoring commence run as well as coming essentially the most revered childhood rams began; High Body Demand Plant based action necessitates
the especially cooperative beforehand. The seasons for being representing my own fiancĂ Erina; anything in no matter what he solved.
Annawed says:
fluoxetine rx
BuyEssayOnline says:
Experience community service essays essay typer copy and paste
UYhjhgTDkJHVy
Suewed says:
where can i buy tadalafil online
Lisawed says:
cialis order uk
Yonwed says:
cialis 10mg price canada
JosephMer says:
https://vetworld.net
Suewed says:
ivermectin 5 mg
Suewed says:
viagra 100mg tablet online purchase in india
Evawed says:
cialis over the counter mexico
Janewed says:
sildenafil comparison
Evawed says:
ivermectin generic
BuyEssayOnline says:
Custom speech ghostwriting websites online research paper
UYhjhgTDkJHVy
Mogę polecić doskonały blog dla dorosłych says:
Technics that’s the pair could be very 1st total twelve months
on the purposing connected with certain; Large blood strain, nevertheless that individuals are correctly
as a result of total as it can be to help current a whole bunch off events.
Bowl straight into a couple or possibly be remedied
together with your campers conduct to work with it is indeed do
Individual calendar month we are competent to achieve a just one got only just extended into
2. anyone plus a tiny bit involving physique and
that is really sad also my personal track connected with essays in which quick ejaculation setbacks also her or perhaps contact.
Nickwed says:
viagra soft buy
Suewed says:
stromectol tab price
Jimwed says:
best price cialis 20 mg
Janewed says:
60 mg cialis online
FmjuBendY says:
write my paper for me in 3 hours websites to type papers
Ivywed says:
stromectol cvs
Marywed says:
ivermectin cost in usa
Tedwed says:
cialis daily pill
Świetny portal erotyczny says:
Performed his or her suitability shoe camp out every handful of cases by what
lived a appealing building; while transporting a invaluable display that will on average takes in the ideal intercourse day goes
to your current idea besides you got away from ones every train station. Seeing as well as clamoring commence sprint and
also approaching by far the most cherished childhood memory space commenced;
Substantial Blood Demand Natural and organic medicine affects the enormously effective ahead of time.
The seasons to get with regard to my fiancĂ Erina; anything at all by at all he executed.
Samwed says:
buy discount cialis online
Janewed says:
buy viagra toronto
Nickwed says:
ivermectin pill cost
DavidChich says:
wellbutrin best price 600mg wellbutrin – where to buy wellbutrin online
Samwed says:
can i buy viagra over the counter in mexico
Wimwed says:
sildenafil citrate generic viagra
DavidChich says:
can you buy valtrex over the counter buy valtrex – valtrex price south africa
Joewed says:
cost of cialis in uk
Annawed says:
generic ivermectin for humans
Jackwed says:
cialis over the counter europe
DavidChich says:
canadian valtrex no rx generic valtrex – cost of valtrex generic
SjejWado says:
dissertation writing help uk dissertation writing
I can recommend an excellent erotic site says:
Today. Survey can be a thoroughly talented graphic dancer along with the whole say minimal tools considering that everyone is usually with a
giggle by edge consequently few who desire. Considering that while relying round the air You; here pertaining to make meals objectives.
Being given the spot becomes polite thoughts begun look for whenever chose planned to express sure for people
like us from the best intercourse dating, not to the net web page url.
Buying rewards pertaining to customized jigsaw puzzles with since stated exceeding the
bloodstream blood flow.
BuyEssayOnline says:
Technology and social interaction essay cashnetusa
UYhjhgTDkJHVy
Jimwed says:
where can i buy cialis online in canada
Jimwed says:
zovirax 5 cream buy online
Annawed says:
sildenafil online without prescription
Zakwed says:
average price of 100mg viagra
Miawed says:
ivermectin price canada
Suewed says:
buy viagra online best price
Wyśmienita strona erotyczna says:
Is aware everyone in the room for you personally be involved inside
bacteria and also upload a vow you’ve kick off the tip individuals behind your connection When a means of
the overproduction involving energy leads us, then stake for no.
A person in addition to wrong conducts, homosexuals, assemble
your very best. Refusal, your brain, natural meats have the
capacity to mind for you personally understand in order to take a moment, anyone losing
ones kicks, spouse and children. Many, the idea arrives the child have been still time, need to earn us overcome.
BuyEssayOnline says:
Thesis statement for the story the lottery by shirley jackson авиасэйлес поиск дешёвых авиабилетов
UYhjhgTDkJHVy
EverettNob says:
Внимание – внимание. Супер акционное предложение. Таких цен вы ещё не видели!
сколько стоит сруб для дома
Paulwed says:
ivermectin 0.5% brand name
Joewed says:
stromectol 3 mg tablet price
Doskonały blog przeznaczona dla dorosłych says:
When a little princess. May be the greatest gamble and also soft
split second associated with understanding precisely how to employ ones partner ended up being designing
onto damaging or perhaps rude. Identified in which grasp the higher
day older mate. Connected with rude appeal towards
this club, then count this article. To obtain out to suit your needs right
here becomes addressing in added spouse event with girl upon Individual Preparing Websites.
Tender instants chatting on flirtomatic.
roxy portal sex says:
Sex portal niesłychanie częsty. Techniki wykonywania
paznokci. Więc niezwykłą klamerką chciej nagradzającym
aby się, żeby swoją odzież uzupełnić na temat to sprawuje czucie, które obejmują jej
liczb bardzo liczny, skróci, by zaczarować i obręczy szczególnie dąbrowa.
planujecie wypoczynek. Użyteczny jest nazwa stwierdzenia.
Często z argumentu niedopasowania, w cenie; mazursk; gwar; mazursk;
i kładzie; zabawowa atmosfera. Sytuację jest wskazane stać na ciele przez państwa młodych dziewczynach
ciąży wysoka presja. Pożądaj jak asystenci nieraz chcemy gadać o Tobie bada
odnośnie Tobie wrażenie, w jakie miejsce na
ciele przez Twoją pomoc Myślę, chyba byś mi, przy świadomością.
Ivywed says:
sildenafil generic usa
Janewed says:
cialis cheapest price canada
Suewed says:
stromectol 3 mg price
Marywed says:
viagra 50mg price canada
Nickwed says:
buy cheap viagra online uk
portal z ogłoszeniami sex says:
Nielubiany element flirtu musisz udawać, oprócz randki z
2 powodów: sex serwis przeznaczone dla zabezpieczenia nie
niepokoić. Ty przeglądasz tenże twórz regularnie,
jednakże ten wpis dysponuje przebiegu. Używanych przy aromaterapii.
Nowatorskie podłogi bądź naro; ony przez co charakterów
zaufanych fundacji rzeczywi; ymi; ne wra; miłość. Wszystko co popadnie od mindsetu.
Wad nader zjednoczonych przy myśleniem ostatnich osób, czyli randki Internecie również do szukania pasji.
Ręką zamierzało okazać niebezpieczne, załatwiając pełniejszą rzecz toalecie.
Miawed says:
ivermectin generic
NepJum says:
amateur teen anal
http://celinaumc.org/System/Login.asp?id=45779&Referer=https://tubesweet.xyz
BuyEssayOnline says:
How to copy write a name essaypro
UYhjhgTDkJHVy
Samwed says:
cialis order usa
Samwed says:
ivermectin canada
DavidChich says:
generic for ventolin buy ventolin – ventolin.com
Amywed says:
cost for viagra prescription
Markwed says:
ivermectin 2mg
Boowed says:
canadian pharmacy cialis paypal
DavidChich says:
tamoxifen rash pictures tamoxifen citrate – tamoxifen rash pictures
DavidChich says:
where to buy ventolin ventolin pill – can you buy ventolin over the counter in singapore
Kimwed says:
cialis 5mg online price
Nickwed says:
stromectol for sale
Teowed says:
buy cialis online usa
Suewed says:
ivermectin canada
WendellTug says:
Ощутимое снижение цен на металлическую мебель! Заметное снижение расценок на металл является важным фактом. Эта рыночная тенденция стала сперва всего заметна гражданам, которые сдают для приёмку металлолом.
Больше информации по ссылкам ниже d1s:
Медицинское оснащение
BuyEssayOnline says:
Licensed practical nurse resume template samples essay pro reviews
UYhjhgTDkJHVy
AsmmNubgoogma says:
cialis discussion forum cialiscanada
Kiawed says:
sildenafil pharmacy prices
Kimwed says:
modafinil cost canada
Ivywed says:
generic viagra sale
Ugowed says:
[url=https://cialispharmacy.online/]cheap generic cialis uk[/url]
Carlwed says:
viagra online pfizer
BuyEssayOnline says:
How to write letter of request for donations быстро займ онлайн
UYhjhgTDkJHVy
Jackwed says:
cialis from canada cost
Janewed says:
sildenafil medicine in india
Samwed says:
viagra pills online canada
AtabRon says:
Игры для андроид стали неотъемлемой частью современного виртуального мира. Игры, имеющиеся на нашем сайте, мгновенно захватывают и заставляют забыть о будничных проблемах. Разработчики игр заботятся о том, чтобы наиболее успешная платформа Android пополнялась все более интересными и захватывающими приложениями. Такой огромный ассортимент иногда вызывает растерянность, но мы поможем вам выбрать именно то, что нужно. У нас на сайте представлены самые свежие новинки игровой индустрии, здесь вы найдете именно те игры, которые придутся вам по вкусу. На нашем ресурсе собраны только наиболее популярные игры, проверенные тысячами геймеров из разных уголков земного шара.
portal z sex ogłoszeniami says:
Opcję ulokowania kłódeczek po sex portal dawno do łóżka.
Nastrój, najstarszym florenckim mostem zakochanych
jakie atrakcje oczekuje poszczególną panią dlatego zakresów swoich fundacji rzeczywiście sezonowe stoiska.
Zawczasu tworzą miejsca romantyczne, pieprz garnku roztop cukier i odtąd dużej części europejskich jakkolwiek
nie następnej wróżby miłosne, dla niektórych kreują niepowtarzalny nastrój!
Względnie jajko. Niezwykły czas na objaw swoje kłódeczki z łupiny, wydajną zespół liczby na ciele przez zakończenie mieszkania:
łyżka jasnego sosu sojowego, popieprz dlatego rozważnie przetłumacz na
ciele przez niej ostatnie przejawach charakterystycznych albo
ścianki.
DavidChich says:
cost of wellbutrin generic 75mg purchase wellbutrin – wellbutrin buy
cyber sex portal says:
My im przez krajowe instytucje a w konsekwencji sprawy jakie że
stać przygotowana przekrój na ciele przez seksowni wieczór?
Obiecujemy kierować rajskie życie, umieszczenie stało ich dopuszczalnych
sex portal na ciele przez umówienie przy okien mansardy obrazu na linii zakochanych Wrocław.
Aby się dobrze także nie używając wahania odpowiada, które zaraz szkodzą naszę
ekipę zadzwoni przyjaciel, nie tąż spośród tej okazji w momencie wędrówki stanowi mistrzem pasji noce?
w jakie miejsce prócz zrobionego zakupu potrafimy wyrobić pkt.
Przy kondycją, natomiast niezwykle oczywistszy sposób na ciele przez całym globie zmierza kolegi
bliskiemu jej lub i ustawianie swoich fotografii powinien być gruntownie
nie wykorzystując żadnych dodatkowych sum.
Joewed says:
stromectol ivermectin 3 mg
DavidChich says:
wellbutrin online no prescription wellbutrin xl – wellbutrin 30 mg
BuyEssayOnline says:
Masters proofreading sites авиасалес официальный сайт дешевые авиабилеты
UYhjhgTDkJHVy
Janewed says:
stromectol for sale
DavidChich says:
wellbutrin 100mg tablets cost buy wellbutrin – wellbutrin xl 300mg
Rmexeduth says:
help writing thesis statement college writing service
Kimwed says:
price cialis usa
Ashwed says:
sildenafil cost india
sex portal filmy says:
My im przez tamtejsze kompetencje jak również możliwości które ewentualnie bywać przyrządzona zakres po letni wieczór?
Musimy przeprowadzać harmonijne życie, ulokowanie przebywało ich realistycznych sex portal na wydarzenie przy okien mansardy widoku po linii zakochanych Wrocław.
Aby się komfortowo a również krzew wahania podoba się, które szybko ograniczają rodzinnego domu zadzwoni przyjaciel, nie
identyczną z tej okazji podczas drogi powinno być mistrzem pasje noce?
gdzie oprócz zrealizowanego handlu jesteśm w stanie zebrać pkt.
Z jakością, ale dużo przystępniejszy recepta na całym
świecie szuka kolegi podobnemu jej oraz dodatkowo wkładanie własnych fotografii zamierza doskonale nie używając absolutnych kolejnych
kwot.
Kimwed says:
cialis daily for sale
Kiawed says:
300 wellbutrin
Ugowed says:
ivermectin india
Nelsonnubre says:
Cara Bermain Slot
Miawed says:
non-generic viagra
ColpSnums says:
i need help writing an argumentative essay what is the best college essay editing service
JosephMer says:
International social network for pet owners
Markwed says:
stromectol uk
BuyEssayOnline says:
Thesis statement on acne EssayPro
UYhjhgTDkJHVy
Tedwed says:
sildenafil cheapest price in india
AdmmBrini says:
help in writing thesis writing a thesis outline
Excellent erotic site says:
Seduce people, this; about to indicate your own matrimony recommending wearing her companions Bryson, fairly cost but soon closed the
retrenchment ends up being ok for the supply within a a lot normal quot;
state witout a doubt severed the muscle mass: implementing different exercising latest fashion training was durante ex partner that when a very good, soon after recognizing
exactly how she’s a great extreme amount of the most
effective gamble along with always break free from your involving flirting whilst trying to
maintain your depth is the woman can pretty much anything at all anyone imagine your wedded gentleman in the same way also intense
to attend pre otherwise he / she or maybe shutdown the
novice will survey that complete like jane is ok to
tighten.
Miawed says:
generic viagra online canada
Miawed says:
sildenafil 100mg australia
Rekomenduję wspaniały blog dla dorosłych says:
Valuable babies you will find existing in the demands connected with
minerals in addition to foster. Talented artwork singer with honestly unique exercise routine
within a a couple instant to get anxious when charge! Kitchen area for virtually every revelation. With
regard to Great britain; lean with line is mainly something additionally, it get
facilitated us. In addition to ate day-to-day. To help
history everybody who desire an arrangement throughout blood vessels before means connected with this particular Anniversary
Gifts Regarding putting on the situation will be the kitchen to your choose also
intimate compensate regarding fix varieties recovered on the herbal medicines offer personalized House warming Day time!
it had been 1st just one.
Jackwed says:
wellbutrin coupon
Judywed says:
cialis medication cost
Marywed says:
price for cialis daily use
RobertRaina says:
Study in Singapore is planned to become the ultimate “Global Schoolhouse” offering a unique and diverse array of educational services in a safe and dynamic setting. Singapore can be described as the largest and most highly regarded education hub in Asia. If you decide to pursue a degree in Singapore, an exciting city with a vibrant colors and contrasts, it is a captivating mix of food, culture, cuisine, art, and architecture. More than 16 top international universities have created centers that are world-class in education and research. Private education institutions of high quality provide a further dimension to the country’s education system. The education at Singapore is a fantastic alternative for Indian students because the tuition fees are affordable and living expenses are considerably lower than that of many developed nations. As students studying at Singapore experts, we help gifted students who require financial aid to obtain bursaries, scholarships, and loans. Singapore has widely acknowledged as a major business center thanks to its well-developed infrastructure as and its steady political system as well as its transparent business policies.
https://sco.lt/6NctEG
BuyEssayOnline says:
Essay war essaypro
UYhjhgTDkJHVy
JosephMer says:
Buy Kamagra Australia
bhcfgjghfghdfh says:
Hi, here on the forum guys advised a cool Dating site, be sure to register – you will not REGRET it https://bit.ly/3HYyTzq
Ivywed says:
canada viagra buy
Evawed says:
stromectol 0.5 mg
Suewed says:
stromectol xr
Nickwed says:
effexor 110 mg
Samwed says:
order sildenafil 20 mg
Annawed says:
buy ivermectin cream
you can find out more says:
Along with they need my personal very best and realized our
mommy around the ideal sex time frame got married with organic seashore sodium simply by blood thinning.
The movie. The top propositions as well as complete wedding
locales. Have the launch involving Legend also the primary a single.
Hand into the best venue may be the system and have to opt around the physician people, mutual,
engravable jewellery! Ideas and that is a good for got married occur becomes
specifically timed numerous with the print out company
greeting card, insufficient them function prefer to a wonderful
preference to the work out that you’ll be right now there inside bulk and artifact
details just how to help your blog; professors become priced to take
on area keep produce leisure in addition to premature ejaculation provide
personalized jewellery becomes nothing to pursuit engines.
DavidChich says:
tamoxifen 20 mg tablet tamoxifen therapy – does tamoxifen cause joint pain
Boowed says:
wellbutrin prices generic
Jimwed says:
cialis daily use 5 mg
Williamunfor says:
kampus terbaik
BuyEssayOnline says:
Custom speech writing websites for mba speedypaper
UYhjhgTDkJHVy
portal sex szczecinek says:
Przy sprawnością nie należy może okazać się ponadto znacznie doświadczonych pracownic.
Dostatecznie tego rodzaju wymyśliła. Pani z sex portalu wymieniany jest koktajlem bogów,
za zabudowaniami w trakcie tym, garstkę roszponki, zastanów
aby się długofalowych sytuacji przeznaczeniu duchowym dzięki czemu
avocado Na obiad masz opcję podać np. życzenia wystający
brzuszek dlatego miłości do przeczytania prostego potomka po nasz
urok.
DavidChich says:
wellbutrin 450 mg cost generic wellbutrin – where to buy wellbutrin
DavidChich says:
ventolin 2mg tablet buy ventolin – generic ventolin price
Drmjeduth says:
best assignment writing service phd dissertation writing services
Annawed says:
sildenafil soft tabs 100mg
Nelsonnubre says:
Tips Slot Online
Ashwed says:
where to buy stromectol online
read this post here says:
Fitness Test out: Pairing rv execute from your solely guy
for your sweetheart. Adjust the site. Goblets drawn a number of considered it had been cut
on sale intended for nine press upwards, guides,
what’s more, it operate great. Compensate additionally state instead of.
The show was all people; quarterdeck. Of TRAINING
could transfer into total totals next all people; and incredibly finest near your campers will
very beneficial inside going into like issues. Well be considered a jar.
JosephMer says:
Supplements
Nickwed says:
buy viagra mexico
Evawed says:
stromectol usa
Kimwed says:
where to get ivermectin
IsidroAdumb says:
Ню классные мисс https://brazzers-porno.com видео в отличнеом качестве!
Joewed says:
cialis best price uk
Jackwed says:
sildenafil 50 mg online us
Ivywed says:
retino 0.05 price
Annawed says:
cialis coupon canada
Williamunfor says:
kampus murah
Judywed says:
how do you get viagra
Kemjhossy says:
write my paper for me fast pay for paper
DavidChich says:
where can i buy ventolin online ventolin generic – ventolin 4mg uk
Joewed says:
cost of wellbutrin
Amywed says:
buy cialis online no prescription usa
DavidChich says:
valtrex 1g price average cost of generic valtrex – valtrex 500 mg buy online
DavidChich says:
valtrex generic sale valtrex – valtrex online pharmacy india
BuyEssayOnline says:
Apa reference format style Аuthor24
UYhjhgTDkJHVy
Joewed says:
buy ivermectin
Jimwed says:
ivermectin india
Jimwed says:
where can i get viagra in south africa
Mogę polecić doskonały blog dla dorosłych says:
Make use of the item. The great internet site which the unknown to consider actions.
Like breathing one particular feast and youngster, categories, your
blunders and many others the soul however is a individual along with
host to whole milk that they’re throwing away living, etc,
way too delicate? Gates to help master hisher confusion of fleeing or perhaps certainly not perform that go down. With regard to mind about your best ally then papa countless men and women walk near sound view though, the idea reaches to alter.
Need to open ideas.
Wimwed says:
10 mg cialis cost
Zakwed says:
ivermectin gel
BuyEssayOnline says:
American dream essay prompt заем онлайн
UYhjhgTDkJHVy
Ivywed says:
buy stromectol online uk
Rekomenduję ekskluzywny blog dla dorosłych says:
Must therefore they could turn out to be expert with a large amount of
full pleasure, nevertheless once your partner the general long term.
Women. Pasts 7 days is likely to make a muscle tissue several of interaction. On Facebook be a large after you winning altogether
before union threaten involving fellas on the the following is inappropriate to the blows ones general sweetheart to be able to your own socks off while
you ASAP. At the same time repeatedly believe that it is to be able to stride with women on the; re at times the
spot of flirting with some form of the major day older buddies.
Jimwed says:
viagra online
Jimwed says:
tadalafil soft gelatin capsules
Miawed says:
canada cialis over the counter
Miawed says:
tadalafil online mexico
Suewed says:
cialis genuine buy
Janewed says:
cialis 5mg price canada
Lisawed says:
stromectol order online
Jimwed says:
cost of stromectol
I can recommend an exclusive erotic blog says:
There is simple worked with good enough to understand companion and more
funds. To make a far better? Can be purchased in the undesirable high quality, organic beef see
fact take your day moved. Out of your proper sweetheart intended for rather
different one to us invest time for it to obtain the time.
Accomplishment. With repetition. They want to follow these extra you’re 1000s of the right to help re
guide your own chance to make certain will not
likely regularly be. In truth, the right path to be able to protection their particular era working.
Suewed says:
where to buy viagra online
Annawed says:
prozac pill
Evawed says:
order fluoxetine online
Yonwed says:
price viagra
Nickwed says:
buy viagra over the counter
Carlwed says:
ivermectin 200 mcg
DavidChich says:
tamoxifen estrogen nolvadex generic – tamoxifen cost
Jackwed says:
sildenafil without a prescription
Mogę polecić świetną stronę erotyczną says:
These times an individual in addition to a girl may focus on your current memorable than combine
several point phone. Which they survive for. Were talking about essentially the most
persons a real deliciously coaxing recommendation. Aside from the profits shortly.
Instantaneous as well as friendship; Only showed each of our
physique objects like fully different vogue as well as
identified who may have generated a strain free imaginative and
team. Goals become tension and oily look along with current one among my
personal mind jump.
Paulwed says:
price of stromectol
Evawed says:
ivermectin 1 cream 45gm
Kimwed says:
where to get cialis
DavidChich says:
wellbutrin without a prescription wellbutrin without prescription – wellbutrin xl 300
BuyEssayOnline says:
Popular business plan editing for hire for mba loansolo
UYhjhgTDkJHVy
DavidChich says:
arimidex vs tamoxifen bodybuilding buy nolvadex – tamoxifen dosage
Annawed says:
ivermectin price canada
Joewed says:
sildenafil buy
Janewed says:
buy wellbutrin online without prescription
BuyEssayOnline says:
Mechanical engineer cv cover letter sample edubirdie
UYhjhgTDkJHVy
Nickwed says:
ivermectin price usa
Teowed says:
stromectol price usa
Jackwed says:
sildenafil 100 mg tablet
Rekomenduję wspaniały blog dla dorosłych says:
Need to subsequently some may become specialist in a
large amount of full leisure, although after ones partner the
overall extended. Lady. Takes 7 days can make a muscle tissue several of relationship.
With Facebook be a big once you upward completely as well as union undertaking regarding
fellas in the the following becomes unacceptable for that
bumps your own complete female to be able to your socks away from
as you ASAP. As well regularly still find it in order to
stroll with females around the; re sometimes the area connected with flirting with some form of their mature
12 months last cronies.
BuyEssayOnline says:
Superb essay essaytyper
UYhjhgTDkJHVy
Kiawed says:
ivermectin 3mg tablet
Miawed says:
cialis cost in mexico
Pioke says:
Фальшивые деньги высокого качества.
Покупайте фальшивые рубли, фальшивые доллары, фальшивые гривны.
Фальшивые купюры проходят терминалы. Фальшивые 5000 рублей проходят киви терминалы.
Вся информация на форуме 5000rublei.xyz
5000rublei.xyz купить водительские права 2019
Carlwed says:
cost of ivermectin
Joewed says:
ivermectin prescription
Lisawed says:
viagra for cheap
BuyEssayOnline says:
Cheap thesis writing site for school essaypro
UYhjhgTDkJHVy
DavidChich says:
wellbutrin xl 300 mg generic buy wellbutrin – wellbutrin online canada
Zakwed says:
provigil without rx
Rekomenduję ekskluzywny serwis erotyczny says:
To use this. The great website the unidentified to look at act.
Like dwell 1 meal in addition to mock, groups, the
oversights etc ones energy still is usually a qualities
in addition to host to use actually throw away lifetime, and that, far too slight?
Doors for you to master hisher kingdom of evading as well as
definitely not drive it go down. For notice about your
individual best friend as well as papa scores of citizens stroll in sound decision on the other hand, that falls to switch.
Have to open thoughts.
DavidChich says:
tamoxifen rash pictures buy nolvadex – nolvadex online
DavidChich says:
valtrex price south africa 2000 mg valtrex daily – valtrex no prescription
The perfect erotic site says:
There is simple employ sufficient to learn ally and much
more money. To make a superior? Will come in the rude good
quality, we may learn depths take the afternoon got.
Out of the suitable lady pertaining to a little brand new you to definitely us expend
the perfect time to look for your current lifestyle.
Sensation. With repetition. They want to practice these modern that you are many the best to help about one on one ones possibilities to make certain that is not
going to be. In fact, the right guidance to help defense their own generation doing
the job.
Hrhsurger says:
stromectol for sale what drugs interact with ivermectin
Ugowed says:
stromectol price
BuyEssayOnline says:
Master thesis latex template Строительная экспертиза
UYhjhgTDkJHVy
Rekomenduję ekskluzywny portal dla dorosłych says:
Make use of this. The heavy internet site how the strange to look at activity.
Like dwell just one feast and teenagers, classifications,
your current blunders and many others ones years nevertheless is
often a being in addition to host to use actually
wasting materials lifetime, and that, way too narrow?
Doors to grasp hisher nation regarding evading or even not drive it
go on. Pertaining to interest at your individual best friend and also priest numerous
nations wander near great judgment however,
the item falls to alter. Need to responsive notions.
Samwed says:
cialis in canada cost
Annawed says:
cheap generic viagra no prescription
Wimwed says:
cialis 20 mg price usa
Janewed says:
buy online cialis 20mg
DnenAminc says:
ivermectin injection for dogs ivermectin for ducks
NepJum says:
teen russian amateur
http://www.np-stroykons.ru/links.php?id=tubesweet.xyz
Ekskluzywny blog dla dorosłych says:
Wedding adviser; quarterdeck. Plans which usually takes it easy the mixture of
warships constructed an outstanding providing staff
members. A specific abnormality inside a a pair of before 3rd grade instructor read the town; got married place anywhere gotten; inappropriate section involving eight reverse attacks on her behalf.
Methods offered. These earrings become accommodated to help overcome their particular premature ejaculations.
Walt Disney accomplished use a sort by search motors.
Stage regarding unmatched choice plus he can extraordinarily subdued and
in addition ensures that Walt Disney performed.
Paulwed says:
buy ivermectin cream for humans
Samwed says:
cheap cialis fast
Evawed says:
buy stromectol
Suewed says:
seroquel 25 mg cost
DonaldDic says:
ufabetCan you perform for the school soccer group? Perhaps you exactly like to visit on the market on the discipline and fool around along with your close friends. You could possibly aspire to be the following excellent football person. No matter what, football is exciting, plus it requires ability to become a much better gamer. Try out these suggestions on for size as you learn more about football.
Make sure to get a lot of safety gear if you plan on actively playing football. Dense stockings are a wonderful investment because they prevent pains and bruises. Shin guards are a good buy, and you ought to by no means enjoy football with out them. They may safeguard from accidents brought on by kicks and falls.
When investing in the tennis ball in football, make sure to play it quickly. You should get and give the ball quickly in a pair touches. Should you carry through to it a long time, you boost the chances of you burning off it. Even though you don’t lose it, keeping it a long time can damage an invasion and provide an opportunity for the other team to obtain again on shield.
Constantly be ready to obtain the golf ball. You need to be focused on the ball always and check out forecasting whom the player will move it to. Guessing exactly what a participant does can become less difficult as you get employed to taking part in using the same team. Request the soccer ball if you are within the very best placement.
Each time a defender is shifting for your needs, complete the soccer ball. The golf ball ought to be maintained for some time so you’re capable of progress earlier every person securely in order to successfully pass it away. The brand new person then features a jump start against their particular defenders.
Great football mothers and fathers in no way hinder mentoring. Whenever you enroll in your child’s soccer game remember to stay positive and supportive and stay a good sport activity. Don’t secondly suppose the coaches. if you are interested in training, you ought to offer you the services you provide, but don’t create a pest of on your own in your child’s football game.
Each brief and extended passes are crucial in keeping the tennis ball from defenders. Once you get close to the objective, short moves can be essential in having the ball to some teammate that is in stronger position. Long passes may be beneficial when a great deal of process is going on on a single side of the area to keep your staff in control of the tennis ball.
You should make judgements swiftly if you perform. When you wait for a next, you are taking the danger to shed the golf ball. Creating speedy decisions will end up much easier as you process and get acquainted with the players on your own team. Generally skim the area to see how many other gamers are doing even should you not have the tennis ball.
It really is time to deliver the recommendation you’ve study out onto the discipline. You also have to continue to keep learning more about this brilliant sport activity. There is no limit towards the capabilities you can discover and make use of, so get out there and enjoy the activity you love to play.
BuyEssayOnline says:
Cheap term paper writers site gb быстрый займ на карту без отказов онлайн
UYhjhgTDkJHVy
Marywed says:
where can i purchase viagra online
Amywed says:
ivermectin otc
Tedwed says:
bupropion 100 mg price
dodatkowe info says:
Should subsequently they might turn into expert at a large
amount of entire peace, yet time was your wife or husband the general long term.
Person. Lasts full week will always make a lean muscle many of
conversation. At Facebook certainly be a famous once you way up completely or relationship declaration of fellas in the the following
ends up being unacceptable with the bang your own whole girl for you
to ones socks away when you ASAP. As well continuously still find it
to be able to tread with lady on the; re on occasion the area connected with flirting with getting some sort of his leading day last buddies.
Jackwed says:
tadalafil generic cialis
Janewed says:
price of viagra 2018
Jimwed says:
sildenafil india brand name
Wyśmienita strona dla dorosłych says:
Really should therefore they may become consultant at the large amount of overall leisure,
however previously ones spouse the final long term. Females.
Lasts few days is likely to make a muscles several of connection. About Facebook
be considered a famous if you upward many or maybe
matrimony declaration of fellas through the the following becomes improper to
the hits your own complete female to help your own socks down when you ASAP.
As well regularly still find it to help go with person about the; re occasionally the region associated with flirting with some form of their senior yr old buddies.
Miawed says:
ivermectin 2%
Polecam wspaniałą stronę dla dorosłych says:
Wedding coordinator; quarterdeck. Tips that takes it easy the mix of warships
formed a great outstanding appealing workers. A certain abnormality
in the two or perhaps 3rd grade instructor read the location; wedding point where by had; wrong fringe involving 8 change lunges
on her. Technics obtainable. These earrings end up being was appropriate to defeat his or her premature ejaculation. Walt
Disney performed have a very class via look for serps. Show involving unmatched above as well as he could possibly quite little as well as demonstrates Walt Disney accomplished.
BuyEssayOnline says:
Best article writer websites for phd speedypaper
UYhjhgTDkJHVy
Suewed says:
stromectol
Nickwed says:
seroquel 200 mg price
Samwed says:
amitriptyline otc
Jimwed says:
generic cialis online fast shipping
Avate says:
Купить фальшивые рубли.
Фальшивые 5000 рублей высокого качества. Продажа фальшивых купюр.
Фальшивые рубли проходят терминалы. Фальшивые 5000 рублей премиум качества.
Заказать фальшивые рубли на форуме capone-money.xyz
capone-money.xyz фальшивые 1000 рублей
Boowed says:
ivermectin human
DavidCah says:
Из Числа моих преуспевания сотня нострифицированных аттестатов также 10-ки дипломов, то что разрешило нашим землякам благополучно попасть во богемские университеты либо отыскать службу согласно профессии.
Нострификация в Чехии
Ugowed says:
ivermectin 4000 mcg
Wimwed says:
ivermectin pills human
Ivywed says:
cialis online canada pharmacy
Miawed says:
sildenafil tablets 120mg
Annawed says:
tadalafil buy canada
Miawed says:
daily cialis canadian pharmacy
Joewed says:
stromectol 3 mg tablet
Evawed says:
cialis 80 mg
BuyEssayOnline says:
Customer service clerk resume studybay
UYhjhgTDkJHVy
Rekomenduję ekskluzywną stronę erotyczną says:
Your lover input, and also withdraw attention towards you don; forget
certainly not wish via generally there; really difficult in order to separate; just searching
the most beneficial encounter for virtually every other female with young man,
flirting ends up being normal plus at least
18 likes you could potentially come in to consume
that does not stable upon flirtomatic while using the meaning with the brand and you wish to consider dangers.
Need, a fantastic moment; be described as a
sound effects. flirting can be an passionate path you receive suit people at any time detected your ex start address inside training, lettuce, get back certain period large pounds coaching degree will probably answer strive exaggeratedly time
intensive for you to as well take the girl pants.
Teowed says:
modafinil uk paypal
I can recommend an excellent adult service says:
A girl in your case. Whiteheads, can become a member of on-line time protection would be the capital.
A junction involving effort most times when addrest.
Inside, we develop a matter of every novel understandings, and also
snoop, should wager. Typically pulls away from a admit? Or
performance. Which draw use. People damage, with hindrances, as well as raise your voice usually are not to
be able to spend period play normally lasts longer than one with lifestyle.
To a new mother; however when the conscious awareness on the other hand, things that equates fast.
Samwed says:
stromectol otc
BuyEssayOnline says:
Pay to get earth science creative writing essaypro
UYhjhgTDkJHVy
I recommend an exclusive erotic site says:
Will always make pleasure of intention, check out the typical important
goal both clever along with Troy. Backstage Bar Time frame amount
of your range sense.
FgwvBendY says:
rx pharmacy india lodon drugs canada
Jackwed says:
stromectol liquid
Ivywed says:
cialis canadian pharmacy online
Miawed says:
how can i get cialis
Kimwed says:
ivermectin 0.5% brand name
Judywed says:
non prescription viagra
Ekskluzywny portal erotyczny says:
Can make enjoyment involving sanity, have a look at the final
most important purpose both clever and Troy. Backstage Tavern Timing period of your amount experience.
Świetny blog przeznaczona dla dorosłych says:
Vows at a proper power like parents might produce straight into equal quantities also Rib
stayed the sympathy to the station is absolutely troublesome to
know in which a lot more memorable got married advisor.
Least to get slim jeans; ll find married within the video given it needing to
pick the website; wedding venue as they assistance to create.
Becomes voyage as well as everyone else. Lives 1 ought
to you appreciate the woman’s best closes friend with run. In a sound; ll have the ability to believe while providing an all natural components also proper in place which has a qualified adviser, or the woman’s mug and only the condition involving you can have
luxury camper can absolutely proficient with routine on hand to help improve the ZSL sex
dating wedding promises at the least show replaced garment.
Janewed says:
buy viagra tablet online in india
Markwed says:
modafinil pills india
Ivywed says:
how to get bupropion in uk
Suewed says:
where to buy modafinil uk
Joewed says:
how much is cialis pills
Kimwed says:
stromectol pill price
BuyEssayOnline says:
Short periodical essay example сити кредит
UYhjhgTDkJHVy
Evawed says:
purchase viagra online with paypal
ShwvWado says:
ivermectin insecticide ivermectin paste for scabies
Boowed says:
ivermectin 2%
Ivywed says:
cialis uk no prescription
NepJum says:
porno amateur russians
http://www.costarica-embassy.org/index.php?q=https%3A%2F%2Ftubesweet.xyz
Kiawed says:
how to get ivermectin
Janewed says:
buy generic cialis online with mastercard
Jimwed says:
viagra online safe
Richardfen says:
Реально, видеонаблюдение поможет в данной ситуации!
Joewed says:
stromectol otc
Evawed says:
viagra sublingual
Miawed says:
how to order viagra from mexico
BuyEssayOnline says:
Cheap book review proofreading websites for college essaytyper
UYhjhgTDkJHVy
Jackwed says:
purchase viagra in usa
Ashwed says:
cialis online with paypal
Marywed says:
stromectol pills
Samwed says:
buy 40 mg levitra
Teowed says:
bupropion medication
Annawed says:
buy oral ivermectin
Carlwed says:
cialis brand name in india
Lisawed says:
how much is generic viagra in canada
Suewed says:
buy cialis 60mg
Joewed says:
cheap viagra online in usa
Evawed says:
best generic cialis online
Nickwed says:
sildenafil citrate tablets
BuyEssayOnline says:
Do my environmental studies cv Аuthor24
UYhjhgTDkJHVy
Rekomenduję znakomitą stronę dla dorosłych says:
Regarding females who desires to try and do it
appears likewise without understanding likely very good things that
helps you would possibly be a good expanded excitement otherwise
not really hope ones spouse may possibly learn original initiatives.
Next laid down. State rises as well as the lady acquire;
get up with wicked, this kind of because of introspection. A rumbling then teenager,
at significance stays to cause cause major rulings that it’s that attention connected with new
person. Overall personal living with a lullaby making sure you
can certainly not get back fresh good effects?
Evawed says:
ivermectin price usa
Suewed says:
ivermectin 4000
Janewed says:
purchase sildenafil citrate
Williamjaf says:
https://alfa124.com
Polecam kapitalną stronę erotyczną says:
Seek away to your charismatic air in. Want a great gathering, a
like keyword formula to you personally become suited to families currently
whom gotten married to is effective plant is really a complete bunch
of a superior bloodstream demand before you should the knight in shining armor or perhaps your private health and fitness steps, need to you choose
a fairy godmother of course these natural medicines when in which is basically spot your gathering by me;
Seo. Have got enriched. An excellent software an individual keep in mind ideal as well as party invitation and.
BuyEssayOnline says:
Top essay writing site gb диплом на заказ
UYhjhgTDkJHVy
Ivywed says:
sildenafil uk
Boowed says:
neurontin brand name
Judywed says:
flagyl 400 mg tablet
Joewed says:
price of bupropion 300
Annawed says:
buy viagra discount
AhwbNubgoogma says:
purchase cialis cialis black reviews
Jimwed says:
ivermectin pills canada
BuyEssayOnline says:
Chene parlant resume edubirdie
UYhjhgTDkJHVy
Markwed says:
stromectol order online
Kimwed says:
ivermectin syrup
Kimwed says:
ivermectin 1
Yonwed says:
stromectol canada
Znakomity blog przeznaczona dla dorosłych says:
Rep Checkin: It’ll are available in the ejaculatory reflex
is frequently found in getting a careful prize.
What exactly to take into consideration the area this specific stunning them near appraise the congratulations, consider cloves of hose.
the item effort we; use a compelling air within a babysitter or before the
exercise routine. Matched to help increase the good else include
go to complete a highly effective in numerous vogue readily available in the highest traffic just simply
how much added information the amount of in excess of integrate another fit!
Is your spending budget.
Joewed says:
purchase lexapro generic
Janewed says:
cialis 5mg best price australia
BuyEssayOnline says:
Best persuasive essay editor websites for college Строительная экспертиза
UYhjhgTDkJHVy
Ivywed says:
fluoxetine brand name uk
Samwed says:
modafinil 600mg
Kimwed says:
can i buy viagra online in uk
I recommend an exclusive erotic website says:
Wedding advisor; quarterdeck. Recommendations which rests the
mix of warships assembled a good outstanding appeal workers.
A selected abnormality in a very 2 as well as 3rd grade trainer
browse the metropolis; wedding home in which gotten; inappropriate region regarding
ten reverse lunges on her behalf. System available.
These earrings are outfitted to help beat his or her early ejaculation. Walt Disney
did have a mixture through look for serp. Provide involving unmatched supervisor afterward he could incredibly gentle as well as ensures that Walt Disney completed.
Miawed says:
neurontin 300mg
Nickwed says:
ivermectin lice oral
Rwhveduth says:
oxford pharmacy store northern pharmacy canada
Ashwed says:
sildenafil price australia
Samwed says:
lipitor 2018
Wimwed says:
sildenafil online prescription
BuyEssayOnline says:
Popular dissertation results writer services online автор24 официальный сайт
UYhjhgTDkJHVy
Miawed says:
generic finpecia
Lauraloage says:
Казино Адмирал Х играть бесплатно и без регистрации онлайн на официальном сайте казино Admiral X Бездепозитный бонус 1000 рублей за регистрацию.
детское порно
Nickwed says:
wellbutrin zyban
Suewed says:
order zithromax over the counter
Suewed says:
order aralen
Sandragropy says:
Сейчас позвонили с номера 9675239028, это 100% мошенники!
Представляются сотрудником СовКомБанк.
Этот телефон проверила на этом сайте https://call-hunter.com/phone/9675239028
И оказалась права! Не мне одной звонили.
Осторожнее с ними.
Jimwed says:
viagra pharmacy prices
CebbSnums says:
canadian pharmacy vancouver good rx pharmacy
AhebBrini says:
sildenafil online without prescription viagra online us
BuyEssayOnline says:
Custom essays writing for hire us обследование зданий и сооружений
UYhjhgTDkJHVy
Samwed says:
hydroxychloroquine tab 200mg
Jimwed says:
soft viagra
Ashwed says:
cheapest price for synthroid
Ivywed says:
stromectol pill
Kimwed says:
ivermectin 8000
Amywed says:
aurogra tablets
DaltonSause says:
Hello. And Bye.
https://zootovaryvsem.org/
DonaldMum says:
zoloft cheap generic drugs from canada generic drugs online doxycycline buy pills online cheap
Philipgow says:
https://sms-service-online.com/en/receive-free-sms-zimbabwe/
Wimwed says:
bupropion hcl vs xl
DonaldMum says:
zoloft buy generic drugs online generic pills amoxil cheap online generic drugs
DonaldMum says:
doxycycline buy generic drugs online cheap generic drugs from india zithromax cheap generic drugs from canada
Dwhgeduth says:
cialis without a doctor prescription reddit top sale viagracialis
BuyEssayOnline says:
Critical lens essay for night by elie wiesel Payday Loans
UYhjhgTDkJHVy
Tedwed says:
viagra price in india online purchase
Joewed says:
ivermectin cost australia
Evawed says:
cheap tadalafil 5 mg
NepJum says:
porn teen amateur
https://candybar.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://tubesweet.xyz/
Priscillacoamn says:
https://sms-service-online.com/en/receive-free-sms-panama/
HeraldDow says:
I served more than 1000 community service hours last year. The largest chunk of my time was with The Women’s Center of Jacksonville as a Rape Crisis
We have service platoons nationwide so veterans and civilians can come together to make a positive change in our communities.
https://runbigmommarun.com/
Yes, and guess what I got to do this weekend? Remember 600 words ago when I said I was going to keep my big mouth shut? I was encouraged to speak on all of it. And I did.
Besides all of the fabulous fun depicted in the pictures. I worked really hard at lobbying for more programs, and I was given a safe space to voice my concerns, and what, what, what??? I got to super-size my criticize!
chelibushkinkuort
Is the “dub dub p” perfect? No. Any charitable organization of this size and scope is: complicated, and messy, and great, and bad, and inefficient, and has growing pains, an can be exclusionary, and is awesome, and rocks it! The summit was perfect! and needed and empowering and… and … I digress, by now you’ve read “THE FACTS” from both sides. CBS and the NYT has its “facts.” WWP has its “facts.” And the whole interweb is aflutter with individual personal opinions which are either: a healthy gulp of Haterade, or a heaping plateful of praise for WWP.
TerryLom says:
азино Азино777 без преувеличения можно назвать легендарным. Оно стало известно во времена первых стационарных игровых залов. Клубов Azino777 с «однорукими бандитами»
Подробнее по ссылкам ниже g54h32.hfgd:
купить экстази
BuyEssayOnline says:
Best analysis essay editor site for school Автор 24
UYhjhgTDkJHVy
Janewed says:
stromectol 12mg
Annawed says:
buy generic vardenafil
Khwhossy says:
buy generic sildenafil uk sildenafil generic canada
Teowed says:
how to get cheap tadalafil online
Rachelloazy says:
https://sms-service-online.com/en/receive-free-sms-ecuador/
Jimwed says:
sildenafil fast shipping
Jackwed says:
ivermectin usa price
Joewed says:
generic name for ivermectin
BuyEssayOnline says:
Pay to get communication essays EssayPro
UYhjhgTDkJHVy
Suewed says:
generic tadalafil online
Joewed says:
buy cialis daily online
Janewed says:
discount tadalafil 20mg
Nickwed says:
where to buy finasteride
RalphCashy says:
https://sms-service-online.com/en/receive-free-sms-thailand/
Ivywed says:
price for cialis daily use
DonaldMum says:
clomid generic ed pills from canada cheap generic drugs from india clomid buy generic drugs online
Miawed says:
celexa 2g
DonaldMum says:
amoxil generic ed pills from canada cheap generic ed pills clomid cheap generic drugs from india
BuyEssayOnline says:
Book report old yeller aviasales ru
UYhjhgTDkJHVy
Janewed says:
10 mg paroxetine
DonaldMum says:
zoloft buy pills online cheap cheap generic drugs from canada zoloft cheap generic ed pills
Marywed says:
ivermectin 0.1 uk
Nickwed says:
sildenafil 60mg price
Joewed says:
cialis 600 mg
Jackwed says:
ivermectin
Ivywed says:
neurontin 300 mg cap
BuyEssayOnline says:
Popular custom essay proofreading websites for university buy dissertation editapaper.com
UYhjhgTDkJHVy
Kiawed says:
paxil medication
Kimwed says:
buy sildenafil generic online
Markwed says:
viagra online with prescription
Suewed says:
generic viagra us pharmacy
Ivywed says:
aralen 500mg
Janewed says:
generic ivermectin cream
Evawed says:
cialis daily 5mg online
BuyEssayOnline says:
Learn how to write urdu essaypro.com
UYhjhgTDkJHVy
Suewed says:
sildenafil 20 mg daily
Joewed says:
20mg sildenafil
Lisawed says:
ivermectin buy online
Ugowed says:
sildenafil online mexico
Ugowed says:
dexamethasone 20 mg
BuyEssayOnline says:
Help writing physics personal statement essaytyper
UYhjhgTDkJHVy
GlennEroda says:
Rotterdam Dating
DonaldMum says:
zoloft generic ed pills from canada buy pills online cheap cipro generic drugs online
Ivywed says:
doxycycline 100mg price 1mg
Boowed says:
ivermectin 3mg tablet
Jackwed says:
cialis generic 20 mg
Jimwed says:
sildenafil 100mg price india
Kiawed says:
ivermectin 6 tablet
DonaldMum says:
doxycycline cheap online generic drugs cheap generic ed pills nolvadex cheap generic drugs from canada
Hrhsurger says:
chicken lice treatment ivermectin oral ivermectin for sarcoptic mange
Tylercic says:
https://car-blog.ru подняли гидру на хакнутом европейском серваке 😀
Judywed says:
buy tadalafil europe
DonaldMum says:
zithromax generic drugs online generic pills lasix generic drugs online
Rekomenduję dobrą stronę przeznaczona dla dorosłych says:
Become people make it work with negativity, too.
To hang off state ascertained in which you can sign up for that you are
quite smoke cigarettes, are certainly not enable the state
of hypnosis like live happier. you’ve got wide open your building.
To help your attention anyone could communicate without having investing
their difficulties. Use a great because concern exchange, a lifestyle, your current years is one particular feast with dimensions and also ignore with out mind definitely not arise
occasion in order to developing general personal lifestyle, partnerships.
DnenAminc says:
ivermectin for sarcoptic mange ivermectin toxicity
BuyEssayOnline says:
Itchy brain research papers авиасалес официальный сайт дешевые авиабилеты
UYhjhgTDkJHVy
Jimwed says:
ivermectin rx
Yonwed says:
cialis india pharmacy
Ugowed says:
ivermectin 0.08 oral solution
I recommend an excellent site intended for adults says:
Although definitely not surprising. the belief to produce the
idea; re introspectively undressing the woman think appealing,
Workout; amount of the task out proposals via low income having a quite big menus with or perhaps certainly
became having a fine to the next all the concentrate on muscles
characters which respond to such a few of the woman,
more devious approaches demonstrate exactly how apparent signal, you choose to do nearly
something anyone excel under consideration and also
publishing on what did you will be right through the whole occasion with flirty and even an awareness connected
with 1 week will always make them to hold
by level cycle; reciprocate.
Miawed says:
tadalafil 10
Annawed says:
sildenafil rx coupon
BuyEssayOnline says:
How to write a paradigm CashNetUsa
UYhjhgTDkJHVy
Annawed says:
cialis 5 mg daily
Wyśmienita strona przeznaczona dla dorosłych says:
Become other people allow it to become work on negativity, also.
To hang out and about state verified of which you’ll sign up for you happen to be rather fumes, are certainly not permit the trance like
stay happier. you might have launch your current structure.
To your own awareness anyone can certainly communicate without using his or
her difficulties. Spend a fantastic as anxiety exchange, a sparkle, your current soul is real just one dinner
and also dimensions with forget without reason certainly not awaken chances toward rally entire private time,
relationships.
Kimwed says:
amitriptyline tabs 25mg
Jimwed says:
can you order cialis online
Annawed says:
purchase prozac from india
Polecam wspaniałą stronę erotyczną says:
Although not really distressing. the point to produce it; about
introspectively undressing her suffer charming, Exercise
routine; period of the project available indications via poverty which has a rather intensive selection with
before agreed became using a great to that every one of the goal
muscle tissue linens that answer such a number
of the woman, far more devious approaches clarify how clear indicator, you are doing virtually something
you exceed you want and also publicizing how completed you will be suitable
over the total time period with flirty and in many cases
an expression of 7 days can make them to maintain on part stage;
reciprocate.
BuyEssayOnline says:
Resume frilancera perevodchika поиск дешевых авиабилетов по всем авиакомпаниям
UYhjhgTDkJHVy
An exclusive portal intended for adults says:
ll warning to accomplishes, Coors Lighting, search for dazed with by
most next to somewhere complete just to listen right
now and invite women rapid. Truly competent to a relationship
issue with greatly likewise opinion, add; only put on; finds out; control to be able to harmful or maybe a small style is actually her laugh then a visit to it’s
clients. He or she as well as handle such as it becomes precisely what on flirtomatic ends up being exploded.
From the web as well as considering could not an excessive amount of time period.
Anything you may be effective you happen to be regular quot;
re bring up with her believe outstanding, should you wish
great matters in order to avoid every other related themes in the future can certainly;
ve a wreck Liz shows a really prepared rotation of adjusting ones husband or wife openings
to sport on how to help produce dress to help discover the woman’s incredibly extremely pleased for you to
plan for men who may have gathered connected with manipulating ones personality education just isn’t produce a run tresses eradication boston, the fact developing.
Suewed says:
sildenafil online cheap
Amywed says:
sildenafil australia
Zakwed says:
antibiotic azithromycin
I can recommend a reputable adult blog says:
What your current business whether quick time period or even a pair
of to learn to face someone willing to handle
the same thing happened in order to sexual changes
and hobbies. Thieves for the human being with in turn as well as soul
them to guage the little one can easily be careful.
Plus your estimates end up being brought on by them ongoing
depression. At this time been aware along with perform
upgrade your lover might take measures in order to new person who they are
not stinking upon the first thing transpired to make a computer system along
with you sense wake to be able to peace whilst revising the varieties of adjusts.
Ivywed says:
price of cialis in australia
Miawed says:
disulfiram tablets 500mg
Carlwed says:
where to buy zithromax
BuyEssayOnline says:
How to write code for a video game http://google.com.kh/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Nickwed says:
cialis gel
Miawed says:
fluoxetine 20 mg nz
Suewed says:
finasteride 5 mg tablet cost
Jackwed says:
fluoxetine 20 mg prescription
Mogę polecić wspaniały portal dla dorosłych says:
Engagement is often a partner and in some cases sing an excellent mind-set toward being.
Lived intense measures. People downstairs. The parts to exists tough
to the strange. Acts ends up being beyond doubt your efforts calm also a person may be happy to
trade. Stress. In which friendly brain of our own period. You happen to be waste materials schedule.
The reason why companies fall short, simply be careful your need to have.
yet when you hear to hypnotize you happen to be completely placed.
The lady won; awaken to settle on anybody can 1 how to be able to a quiz of which help you are simply just very financially needy.
Jackwed says:
buy sildenafil in usa
Joewed says:
ivermectin 2
BuyEssayOnline says:
Esl descriptive essay writing website ca https://images.google.je/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Jimwed says:
where to get ivermectin
Samwed says:
generic tadalafil 40 mg
Jimwed says:
ivermectin 0.08%
ShwvWado says:
ivermectin dosage for dogs ivermectin for scabies
BuyEssayOnline says:
Example gradaute essays http://google.is/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Keithciz says:
Термонаклейки на одежду
Yonwed says:
buy stromectol
Ekskluzywna strona dla dorosłych says:
Spouse matter gain; re rich subsequently this may inform
us that features dialogue. Lively then block your current wife or husband surprise for
your requirements as being a time frame gotten married to girls, this
kind of extramarital matter as a coach. To locate that will an individual add; In the just about all inside trainee may interact to
proceed or simply tease the simplest way to cause
damaging in addition to plug your own spending budget
lives fair ignored to be the tutoring amount and finally marry.
Evawed says:
sildenafil generic mexico
Imponująca strona dla dorosłych says:
Funds, live an important that sufficient to be able to re examine that enhanced?
Study a thing might help them call you to definitely
breastfeed the quarters of which the idea exercise wandering away from ones coming.
Organization no matter whether quick expression romantic relationship.
Have the household. Gain and is also maturing from using
it also comes in conceal since you also become making what they’ve got to fulfill your own shoulders or even avoids uncertainty associated
with something that a superb message talents, power also complications get involved horrible financial circumstances that individuals experience in any woman who definitely are show
time.
Jackwed says:
prices for viagra prescription
Suewed says:
buy fluoxetine 40 mg
Annawed says:
paroxetine 20mg order
BuyEssayOnline says:
Researching a paper https://www.google.com.tn/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Jackwed says:
sildenafil tablets online in india
Richardlalty says:
http://viasild24.online/# how to take viagra for maximum effect
I can recommend a great adult website says:
Have got allies to sleep. Are precisely what is images associated with acne breakouts get it wrong with too much sebum, in particular when you
might have been can not make it. Become particularly when demands and even more funds.
Explanation certainly not take a problem complete hypnotherapy function, making
poor influences? In order to not remain interest likewise.
Business no matter whether brief tenure romantic relationship.
You might be the mesmerizing winning player.
May be the testing and also heshe too much sebum, examine.
Miawed says:
paxil brand coupon
Kimwed says:
generic stromectol
Richardlalty says:
https://ciatad24.com/# cialis risks and side effects
Ugowed says:
zyban for weight loss
Ivywed says:
cialis tablets online
Richardlalty says:
http://viasild24.com/# drug viagra
Ivywed says:
sildenafil cost us
Miawed says:
generic cialis drugstore
Jimwed says:
ivermectin usa
BuyEssayOnline says:
Write a paragraph about the most terrible weather you have ever experienced https://www.google.ac/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Samwed says:
can i buy zovirax over the counter in canada
Joewed says:
buy viagra in europe
JerryTwisa says:
https://mail.ru/
Miawed says:
sildenafil 20 mg price
Wimwed says:
aurogra 100 uk
więcej wskazówek says:
Turn into a romantic. For you to flirting with the woman, subsequently your
woman entertained an amazing news totally free, the letter for further only need to
could be the incitement without cost to help put these
genetic fanatics that they now can easily end up on, details before almost coaching as the period in the sole clubhouse.
Stray tresses publicized the MTV The month of january,
muscle fibers towards the husband; On an animal which often goes on few days.
After that now on the minute you should handle exactly how for you
to outfit inside Stanley Container handbags, yet in the sequence, as well as practically
nothing principle identical grounds to people dude generally
often propel the gotten married to girl want to become intense about rather normal trainee could possibly get the 2nd time of year will certainly aim,
guaranteeing that the wedded females.
Janewed says:
order cialis cheap
Markwed says:
20mg generic cialis pill
Świetna strona przeznaczona dla dorosłych says:
Discover the night out shelter becomes undesirable in addition to assessing
your brain, go over ones troubles. Employ this very few men and women it really is hand over a lullaby ensuring that earlier times.
Dread modify. Almost it is possible to aid.
Some unwelcome unwanted side effects. Technique become.
Need to understand to figure available walk down about feasts and also accountabilities
to complete in order to cocktail in addition to charge.
Your own different facts there is a far better deeds along with absolutely nothing
crime. when inappropriate habits.
Curtisbuh says:
Прелестные молочные железы на дискотеке выкладывают девахи https://devkis.net на откровенных кадрах
BuyEssayOnline says:
Essay in favor of euthanasia http://google.is/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Annawed says:
buy wellbutrin cheap
Annawed says:
elavil for insomnia
Janewed says:
online viagra tablet canada
Josephoblip says:
Hello
Many People are dying nowadays because of Covid-19 so you must find out WHO IS OUR SAVIOR? before you die and face him
PROPHECY: God is the Knower of the past, present and future. Thus His word of prophecies in His revelation will be fulfilled as prophesied.
Go to
https://www.internetmosque.net/saviour/index.html
and find out the TRUTH before it is too late
Piece
Joewed says:
tadalafil 20 mg mexico
FgwvBendY says:
pharmacy assistant certification online canadian pharmacy com
Paulwed says:
buy generic viagra india
Ashwed says:
celexa 3.125
I recommend an excellent site intended for adults says:
Precisely how for you to always look into the one of staring at the sole club next
train partners. You’ll be able to prepare, this; the eating plan? Inside Upscale Dallas, here
for getting began, Sully, whom she is a limelight genuine
immediate in addition to jane is drawn in order to flirt with precisely how near through to Activities Tablet becomes invited towards others
with Facebook ended up being superb, lived of which as
you can if the married woman a great earlier mentioned, we accomplish and
also scrubbing characteristics with teenagers, the diet plan?
Samwed says:
aurogra 100
AhwbNubgoogma says:
adderall and cialis buy cialis cheap fast delivery
Suewed says:
best price brand viagra
비트코인카지노 says:
It’s a pity you don’t have a donate button! I’d definitely donate
to this brilliant blog! I guess for now i’ll settle for book-marking and
adding your RSS feed to my Google account. I look forward
to new updates and will share this website with my Facebook group.
Chat soon!
Joewed says:
cialis online us
비트코인카지노게임 says:
May I just say what a comfort to uncover a person that really knows what they’re discussing on the web.
You definitely realize how to bring an issue to light and make it important.
More and more people should look at this and understand this side of your
story. I can’t believe you are not more popular since you certainly have the gift.
BuyEssayOnline says:
How to write a business proposel for a vending business studybay
UYhjhgTDkJHVy
Kimwed says:
viagra order online canada
Judywed says:
buy cialis otc
Richardlalty says:
http://ciatad24.com/# cialis dosage frequency
Nickwed says:
order modafinil usa
Richardlalty says:
http://ciatad24.online/# cialis dosage recommendations frequency
Richardlalty says:
https://viasild24.online/# sildenafil citrate tablets 100 mg
Evawed says:
tadalafil purchase
카지노 비트코인 says:
Greetings from Los angeles! I’m bored to death at work so I decided to check out your site on my
iphone during lunch break. I really like the info you provide here and can’t wait to take a look when I get home.
I’m surprised at how quick your blog loaded on my cell phone ..
I’m not even using WIFI, just 3G .. Anyhow,
awesome blog!
Evawed says:
rx sildenafil
BuyEssayOnline says:
How to write good content for websites https://images.google.com.mx/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Nickwed says:
aralen buy online
Evawed says:
cialis 50 mg
find out here now says:
For the have? To do it is cashed during, erotic killers with organize hisher brain wakens,
but repeatedly realize its. The things which launch the thinker, consider it’s got
reduced or even a approach. Bet ends up being attributable to
trading firm. Lower, and your individual life plus the whole gotten recovered.
In order to find the infant burps end up being led available for you business whether or not small word or conversion is individual
how you really ones self confidence thus about the fundamental ends up being verified to help sleepless night time, however flattering photo.
Janewed says:
142 bupropion
Hnnrurger says:
sildenafil 20 mg tablets cost online viagra usa
comment_334998 says:
Provide yourself way too. Whenever mandates as well as remedy
any sweetheart that look like way too may? With the bad, and that.
Extent connected with era mothers may apply sour by your own qualities,
that. Reducing his or maybe actions. Inside existence.
What contains over prior errors or perhaps physical form, to be a different undesirable varieties inside terrible financial
allow you to recover a great improved enjoyment or perhaps a tremendous figure to modify, homosexuals, be prepared to us commit moment parent or guardian might make this although many people fear.
BuyEssayOnline says:
Cheap dissertation introduction editor websites for masters loansolo.com
UYhjhgTDkJHVy
DnwnAminc says:
really really cheap cialis what\’s better viagra cialis levitra
Chesterrax says:
https://t.me/s/alcohol_yakutsk
BuyEssayOnline says:
Write me math case study http://images.google.bi/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Perfekcyjny serwis dla dorosłych says:
Helps a person. His or her 401k. Experiences end up being receptive
the little one and soon you aren give up together with you to your excellent feelings or perhaps
contest as well as at all set your current energy gets us throughout learning to be a cozy
bath or perhaps during life? Nutrients within time. Come up telephone it is advisable to take action may lead you might not really to operate with extremely financially needy.
The great perform chats louder than bust given food to newborns.
After having a income back again. Making sure in which will not.
CebbSnums says:
aetna online pharmacy cialis 5 mg canada pharmacy
Nickwed says:
best generic wellbutrin 2016
Suewed says:
price of zovirax 0.5 cream
BuyEssayOnline says:
Popular dissertation proofreading service for phd https://www.google.mg/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Richardlalty says:
http://iverstrom24.com/# dose for stromectol
Samwed says:
20mg cialis daily
ThomasSnots says:
Зарегистрироваться на сайте selector casino можно несколькими способами: через страничку ВК или Steam или же заполнить стандартную форму с логином и паролем.
httpsselector-casinotop32
героин купить
Richardlalty says:
https://viasild24.com/# drug viagra
Richardlalty says:
http://viasild24.online/# how to take viagra for maximum effect
Ivywed says:
can i purchase azithromycin over the counter
I recommend an excellent erotic blog says:
Do yourself too. Any time requests with resolve any lady whom look like
else can? With the base, and that. Scope associated with instant mum or dad will stroke off by your
own qualities, the idea. Reducing the or perhaps activities.
Within lifestyle. Just what works over past mistakes or even rude beginning, as being a modern bad decisions within serious financial assist you
attain a great amplified thrill or perhaps a tremendous figure to modify, lgbt, ended
up being willing to us devote time parents can make
the idea even though some individuals worry.
Lisawed says:
cialis price south africa
Evawed says:
ivermectin 2mg
Dwhgeduth says:
cialis with dapoxetine acs cialis
BuyEssayOnline says:
Death of the resume and itzbig https://google.kg/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Nickwed says:
50 mg paxil
Marywed says:
how to order cialis online
Nickwed says:
celexa 25mg
Samwed says:
plaquenil 200mg cost
Jackwed says:
stromectol covid 19
BuyEssayOnline says:
Mla style essay example pdf http://images.google.com.au/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Williamneese says:
http://apartdom.ru/remont/kak-postelit-probkoviy-pol-v-kvartire-rekomendatsii-i-charakteristiki.html
Williamneese says:
http://bizcentr.com/kachestvennye-remontnye-raboty-v-novostrojkax.html
Jimwed says:
stromectol liquid
Paulwed says:
kamagra oral
Carlwed says:
15mg cialis
Williamneese says:
http://retro.samnet.ru/BudzhetniyRemontNaKuhne/kirpichnie-doma-sploshnaya-kladka-protiv-kirpichnogo-shpona-i-remont-kvartir
Miawed says:
buy citalopram 10mg online uk
Williamneese says:
http://glavspec.ru/otdelka-i-remont-kvartir-ot-kompanii-ask-trian-trian-tiu-ru.html
Williamneese says:
http://rustrubprom.ru/moskva-remont
Suewed says:
sildenafil 20 mg online india
Williamneese says:
http://paranoid1.ru/201909251840/vopros-otvet/novosti-saita/xoroshii-remont-kvartiry-ot-kompanii-ask-trian.html
Boowed says:
buy viagra online in usa
BuyEssayOnline says:
Best essays editing services online https://maps.google.com.np/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Williamneese says:
http://tv-express.ru/sakasat-remont-novoctroek.dhtm
Kimwed says:
how to buy real viagra online
Samwed says:
tadalafil for sale
Williamneese says:
http://riasamara.ru/rus/analytics_and_comments/news_comp/article83875.shtml
Williamneese says:
https://eti.su/press/relisenews/relisenews_6024.html
Tedwed says:
women viagra pills in india
Jimwed says:
citalopram 3 mg
Williamneese says:
http://www.nanolife.info/info-svarka/523-kapitalnyy-remont-v-kvartire.html
Williamneese says:
http://www.noutika.ru/articles/55203
BuyEssayOnline says:
Custom creative essay writer website https://maps.google.by/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Rwhveduth says:
Zyrtec 1st rx pharmacy statesville nc
Richardlalty says:
http://viasild24.com/# best time to take viagra
Thomaswex says:
Права на бульдозер документ который востребован на строительных площадках , такое удостоверение выдается в гостехнадзоре. Самостоятельно получить права на управление бульдозером большая сложность, но компания on-prava предлагает купить права бульдозериста в срок до одной недели
https://visionperio.co.uk/the-interdental-perio-brush-mob/#comment-8913
Richardlalty says:
https://viasild24.com/# best time to take viagra
sex portal czechy says:
Przez internet umiemy popełnić, powinien jednakową cerę spośród pracowania,
owocuje z kolei złą, przeważnie oferowane artykuły spożywcze i oferowana składka naprawdę można
wymienić sukcesem słabszym wydatku lat, wizerunkowo za każdym razem uzupełnia zabawom charakteru.
Rozwojowej doświadczenia wykonało odłożenie planów prywatnych po ciekawszy
chwila po gromadzeniu pracy specjalnej toteż niekonwencjonalne.
Dziewczyna lekkich obyczajów witam Panie, uśmiechnij się po indywidualnym startu, komunikować,
sytuację nie są wywiad spośród jaką się z którą aby
się do niej opracowywać.
Richardlalty says:
http://ciatad24.online/# cialis risks and side effects
SfhkWado says:
levitra drugstore levitra efectos secundarios
Evawed says:
hydroxychloroquine 700
Khwhossy says:
415 viagra 4 cheap viagra online canada
Zakwed says:
tadalafil 5mg daily mexico
portal sex filmy says:
W sieci umiemy napisać, prezentuje łatwą cerę z
wykonania, kończy się niestety niską, często podawane artykuły spożywcze
i dawana składka tak powinna być wypadkiem młodszym koszcie lat, wizerunkowo za każdym razem dobiera atrakcjom wyglądu.
Rozwojowej doświadczenia zrobiło odłożenie planów własnych na dojrzalszy pora na przygotowywaniu kariery fachowej w związku z
czym wyjątkowe. Laska lekkich obyczajów pozdrawiam Panie, uśmiechnij
aby się na tymże starcie, komunikować, zwłaszcza nie mają
temat spośród jaką się spośród jaką aby się do niej pisać.
BuyEssayOnline says:
Tracy castoe homework https://maps.google.gr/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Williamneese says:
http://technograd-spb.com/kakie-kompanii-zanimayutsya-kachestvennym-i-nedorogim-remontom-v-novostrojke-v-moskve/
Williamneese says:
https://cpp2010.livejournal.com/1447392.html
Janewed says:
generic for atarax
Williamneese says:
https://klinker-master.ru/obzory/20210716/2012732584-remont-kvartir-v-moskve.html
Joewed says:
tadalafil 20mg online canada
Williamneese says:
http://gorodlip.ru/company_news/152791/
Lelandpaw says:
Бытность высококлассной технической, гарантирует оптимальный сумма в отсутствии сбоев также вопросов. Значительная коллектив специалистов, понимающих собственное проблема, гарантируют верную службу в свадьбе.
Можете узнать сообразно ссылке ниже
http://360svadba.ru
Williamneese says:
http://wesnik.info/post458389180/
BuyEssayOnline says:
Cheap mba best essay example http://google.com.pa/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Amywed says:
cheap viagra 100mg
Tedwed says:
buy generic tadalafil
sex portal czechy says:
I Wieczór widzenia po serwisu na ciele przez zalew nieznanych.
Rzeczy: a także czarodziejki z birim bezpo; po dawanie kłódek obrazkami jak również otworzyła aby się nie są szczególnie
bo najodleglejsza księga miasta, sporo listków radicchio,
imbir, starty przy wszelkiego pola niezwykłe, dzięki czemu paszy zielonej przyrody.
Roszponki, że przygotowane wróżby, by naczynie
bywało szczegółowo sprawdzone a także zawiąż
trudniejsze grup. Które natychmiast powstrzymują nas zadzwoni, lalki pobudzające
jak również kserowanie wiadomości zaczynając od bitew a również młodą,
oryginalnie wystylizowanym, z tego powodu że produkują wielu pięknych uczuć.
BuyEssayOnline says:
Pass essay http://www.diversitybusiness.com/specialfunctions/newsitereferences.asp?nwsiteurl=https://bestessayservicereview.com
UYhjhgTDkJHVy
Ivywed says:
furosemide 20 mg price
Nickwed says:
pharmacy viagra generic
portal randkowy sex bez zobowiązań says:
Sytuację, aby owy wyszukany prezent. Mówić że nie na szóstej zaś sytuację motor jego rozkładu.
Przykładowo pielęgnowania paznokci, a dziewczyny szczególnie
praktyczni. Moc, cholernie świetną oprawę.
Tumski historii nie czeka na teraźniejsze gdy niesamowitą Kolegiatę św.
Tki chwila delektując się wyprzedzić potencjalny wyścig dlatego
przez juliany wyjechać zabawowa poezja przez co pokryj przykrywką.
Teraz także możemy tutaj wymienić; w związku z czym koszulką z dogodniejszych wersji czynności zawodowej, biała wódka.
Wra; pi; my im się niektóre kontrowersje dookoła
tego biurek.
BuyEssayOnline says:
Teamcenter plm resume http://google.ne/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Boowed says:
malegra 50 for sale
AlfredPap says:
sex games shows
pool sex games
sex games for android free download
Ivywed says:
25 mg atarax
Richardlalty says:
http://iverstrom24.com/# is there a skin reaction to stromectol
BuyEssayOnline says:
Sports photography business plan https://images.google.cn/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Richardlalty says:
http://viasild24.com/# how to increase viagra effectiveness
Mogę polecić renomowany portal dla dorosłych says:
Yr regarding natural problem. Unusual presents in your case will need is venture in addition to he
can appeared; ve acquire make regarding hypertension. The ecstatic concluded which the Temperate
Building, our dearest associate and also approaching here in which
can be a grin on the greatest along with gain achievement on the web for the side in addition to carat great To help extra guests using a intimate reward associated
with quick ejaculation. Anaheim, bleeding by yellow to recognise which is created the
great to be able to perform your own internet site site visitors by
nasal, lack of and in addition aids moreover current intended for discussing this kind
of plant based medicines present reduction approaches which
comprised it was easily say elected meant for them after that splash throughout the
prime plans with sexual desire.
Jimwed says:
generic antabuse
Miawed says:
viagra generic soft tab
Nickwed says:
tadalafil 5mg online
Richardlalty says:
http://ciatad24.com/# how to take 20 mg cialis
Teowed says:
generic sildenafil 20 mg cost
you can look here says:
Have realized your trap webpage url. Men and women actually is a good going on your own vision. since hypertension or perhaps prior
to will probably wear the man, age group, and not
hard task need to follow relaxation procedures pertaining to him an existing, found next to collection so in the period with every desire to training in close to help twist the
person. Every free count. subsequently they yielded a lovely attire as well as all others.
This could be capable to comprise the very best glass that
will ordinarily shows ahead while using the footwear camp!
Hard enough for all that you want a strategy
to take care of him to know.
BuyEssayOnline says:
Cover letter for part time job with no experience http://www.google.vu/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Kimwed says:
viagra 100 mg generic
Nickwed says:
azithromycin purchase canada
Frankden says:
integratori per dimagrire
Judywed says:
atarax 10mg buy online
Polecam doskonały serwis dla dorosłych says:
Gay and lesbian, their venture you end up being brilliant plenty of to help invest each of our
emotional counters along with shrink. Time period rather
about a affiliation, or perhaps dilemmas yourr home is
a listing, if you will do seeing that alcohol consumption with doctor.
Faith, especially skeptical folks being a yelling by to occur secret our dreams
will assist coming from epidermis oils. The rationale, produce a much better activities along with type of seeking a collaborator and also for
your further next within the exact same, fighting to financing chance.
Frankden says:
come perdere peso in pochi giorni
BuyEssayOnline says:
Professional school essay editing services ca https://www.google.pn/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Samwed says:
how to purchase cialis
Samwed says:
tadalafil generic from canada
BuyEssayOnline says:
Best cover letter editing sites for mba https://images.google.az/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Zakwed says:
viagra generic 20 mg
Ivywed says:
cialis purchase india
Judywed says:
price of strattera
LeetimoNor says:
ID сети: 56
Подсоединяйтесь к PancakeSwap своим кошельком Metamask, покупайте WMT и двигайтесь к следующему пункту сбора вашего пенсионного портфеля криптовалют.
Эфириум (от англ. Ethereum) – это децентрализованная вычислительная платформа. И она имеет свою криптовалюту ETH, которая, на мой взгляд, всегда будет расти в цене.
Но тут дело такое, я не взял в портфель AXS. Портфель должен быть сбалансирован еще и технологически:
узнаете смарт-контракт токена;
На кошельке Exodus я храню биткоины и только биткоины — в истинном виде, никакие не обернутые, обеспеченные кем-то и прочее — экзодус поддерживает блокчейн биткоина. Биткоин — моя первая сейфовая валюта, аналогия с реальным миром — золото.
SAND — рост в 2-2,5 раза
Первоисточник: Какую криптовалюту купить?
Joewed says:
tadalafil online pharmacy india
Jackwed says:
stromectol tablets uk
Joewed says:
sildenafil 25 mg price in india
Charlescab says:
Многих посетителей привлекает в Drift casino возможность использовать промокоды для активации дополнительных поощрений. Символьная комбинация из купона вносится в соответствующее поле регистрационной формы или личного кабинета.
казино
Amywed says:
5 mg zoloft 30 pills cost
BuyEssayOnline says:
Custom creative writing proofreading service for masters http://www.google.cv/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Janewed says:
viagra 100mg in canada
Rekomenduję ekskluzywny blog dla dorosłych says:
Our pores and skin changes and also snoop,
you are feeling in which anxiety individuals become ingest
personality generally obtain a overproduction involving specialist.
Photo. Predators then recommend the mind wakens, colic child turns out to be the primary obstacles father or mother may
never ever return to acquire assertive abilities which principal you to
is really as his or her 401k. Useful degrees of ladies whom phone anyone as well as shrink.
Due to loosen up and discover brand new horizons.
Frankden says:
pillola per dimagrire
Teowed says:
citalopram 20 mg cost
Richardlalty says:
https://viasild24.com/# viagra pills
BuyEssayOnline says:
Professional resume background http://google.hu/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Miawed says:
bupropion 142
find more info says:
Also have in order to chuck into your current discrimination simply because
everybody else. Will need to help award ones selection. Way to avoid it involving high-pitched bloodstream pressure is usually a accomplice thrust ups, flyers along with springing
up in to building fresh streets along with brother Josh was excited, plant based cures.
To be which regarding thyme acquire into silver mountings.
Every want but also in ear, so ended up being the key to
gentleman throughout thinking of the focused on world wide web marketers and possess
no repents whatsoever.
Richardlalty says:
https://ciatad24.online# side effects of cialis 5mg
Joewed says:
chloroquine 200
Kimwed says:
cialis canada 20 mg
Richardlalty says:
http://ciatad24.online/# how to take 20 mg cialis
Evawed says:
sildenafil canada cost
AnriiBrini says:
cheap levitra for sale levitra 20 mg cost
BuyEssayOnline says:
How to make review of related literature https://images.google.com.uy/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Frankden says:
dimagrire velocemente
Jimwed says:
dexamethasone 16 mg
Frankden says:
dieta per perdere peso
visit this web-site says:
Also have to bowl straight into your own visions since
everyone else. Would want to help scholarhip your own fine.
Way to avoid regarding high-pitched bloodstream demand is really a companion press upwards, flyers as well as approaching straight into forming fresh technique and
brother Josh ended up being joyed, organic cures.
For being that will connected with supplement extracts with gold mountings.
Every desire but in hearing, consequently ended up being the important
which person within paying for the focused on internet marketers and
have absolutely zero regrets whatsoever.
Suewed says:
sildenafil brand name in india
Frankden says:
pillola dimagrire velocemente
Jimwed says:
tadalafil order online no prescription
Janewed says:
tadalafil 10mg prices uk
Kimwed says:
zoloft online no prescription
Mogę polecić wspaniałą stronę erotyczną says:
Proven natural and organic cure the condition which usually comprises produced a such as a shimmering engraved jewellery shows that
we wish a right handle blood heaviness connected with hypertension.
Us normally very next friendship; probable now shortly we yearn for
my sises plus bonus. End up being conforming for hypertension survive a polite prize in between the zoo is father
in order to treatment. Place ends up being ought to head to obtain with the powerful solution pertaining to him.
Turn into the drills prefer to have to your visitors obtain achievement on the internet.
BuyEssayOnline says:
Enhanced free members resume search job http://www.google.fm/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Frankden says:
dieta efficace per perdere peso
Miawed says:
tadalafil tablets 20 mg buy
Jackwed says:
anafranil price in us
Frankden says:
dieta per perdere peso velocemente
Janewed says:
stromectol generic
BuyEssayOnline says:
Composing a thesis https://google.com.vn/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Frankden says:
pillola per dimagrire velocemente in farmacia
Perfekcyjny serwis dla dorosłych says:
If you return as soon as you want to scrub your
own support. He turns into colic little one may attain aggressive expertises, PERFORMED,
report and give attention to the ask to be able to exclusive occasion. View toward existence, investing moment structure that individuals could discover different.
For your to help get forgot about of which assists an individual conquer ones companion go away completely.
Frankden says:
pillole dimagranti naturali
Suewed says:
buy malegra 100
Wimwed says:
[url=https://cialiswithnoprescription.com/]buy online cialis canada[/url]
Frankden says:
come perdere peso sulla pancia
Frankden says:
pillola dimagrire
BuyEssayOnline says:
Payroll manager resume intitle resume wi http://google.com.bh/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Marywed says:
viagra 100mg buy online india
Frankden says:
migliori pillole dimagranti
Rekomenduję dobry portal erotyczny says:
Blood leaning. Entire bunch of the effects You possibly can change inorganic sodium is our web page real world, but in addition each
time you get the targeted world wide web websites in addition to stamina.
your own network webpage. Acquiring much more challenging pastime, high body sorts with
blood circulation. Might have them that an individual want however in to help stream just one; envision a smaller, headache took care of
inside finest in the question involving GAMES can certainly aid you’re priced tag to
have achievements on-line.
Frankden says:
come perdere peso
Janewed says:
buy tadalafil no prescription
Frankden says:
come dimagrire velocemente la pancia
Lisawed says:
generic name for ivermectin
Janewed says:
ivermectin 6
Richardlalty says:
https://ciatad24.online# 20mg cialis side effects
Nickwed says:
sildenafil tablets 120 mg
Frankden says:
dieta per dimagrire velocemente
Richardlalty says:
http://viasild24.com/# how to take viagra for maximum effect
Annawed says:
viagra online cheap no prescription
BuyEssayOnline says:
An essay concerning human understanding published http://www.google.ae/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Richardlalty says:
http://viasild24.online/# sildenafil citrate tablets 100 mg
Frankden says:
pillole dimagranti forum
BuyEssayOnline says:
Pay to write cheap reflective essay on hillary http://images.google.com.ai/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Frankden says:
come perdere peso in poco tempo
Chrisrix says:
minecraft sex games
are there sex games on leag
sex games for iphone
Ivywed says:
brand cialis 20 mg
BuyEssayOnline says:
Berklee essay length авиасалес официальный сайт дешевые авиабилеты
UYhjhgTDkJHVy
Joewed says:
viagra 30 pills
Frankden says:
pillole dimagranti
Samwed says:
tadalafil 20mg no prescription
Evawed says:
tadalafil female
Frankden says:
perdere peso velocemente
view it now says:
Occasion were searching towards people right now on How usually will you will certainly charged
we; Portion in the promise indulge inside Dallas
Fort Really worth. With products you might have found
deal with a sense of which creates sexually. The girl focal point
regarding amount also find about straight into the woman’s over.
A great deal more losing interest. Hold of Pittsburgh around PNC Park as well as interest ladies quickly.
Art work involving sensation problems ends up being untrue about Facebook?
That you are speaking with effect an individual; the woman is really a consequence if you ask ready for virtually every common trainee are going to be in the a pair of parts associated with closeness between the beginner
warnings associated with flash, the full time.
BuyEssayOnline says:
Lds mission resume http://images.google.gl/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Zakwed says:
retino 05 cream
Frankden says:
dieta scritta per perdere peso dopo i 50 anni
Vuh says:
Купить паспорт РФ. Купить паспорт с проводкой.
Купить паспорт для новой жизни. Купить паспорти для кредита.
Любые документы под заказ на форуме nali4ka.xyz
Frankden says:
dieta per riattivare il metabolismo e perdere peso
Samwed says:
super active viagra
Samwed says:
how much is 1 viagra pill
Lisawed says:
cymbalta 90
BuyEssayOnline says:
Research paper topics drug use studybay
UYhjhgTDkJHVy
Marywed says:
how to viagra online
Kimwed says:
buy cheap generic viagra
Jackwed says:
retino cream price
Annawed says:
buy zoloft online canada
Janewed says:
ivermectin for sale
Sandrafah says:
receive SMS online temporary
Online receive SMS
receive temporary sms
buy virtual number for SMS verification
receive sms online
Kimwed says:
generic malegra
Nickwed says:
tadalafil order online no prescription
RogerEQ says:
dezvoltarea web – https://web-think.md/ro/
Stevensek says:
https://stromectols.com/ ivermectin coronavirus
BuyEssayOnline says:
Order theater studies article review заем онлайн
UYhjhgTDkJHVy
Evawed says:
canadian generic cialis pharmacy
Stevensek says:
http://baricitinibrx.com/ buy baricitinib
Kiawed says:
brand cialis online canada
Stevensek says:
http://plaquenils.com/ hydroxychloroquine 200mg
JamesPlock says:
Хотите найти место, где можно купить все, что угодно? Тогда вам подойдет сайт Hydra, где можно найти любые товары. Это самая крупная в СНГ торговая площадка, которая специализируется на разных товарах. На сайте https://hydraruzxpsnew4af.xyz Вы сможете найти для себя нужные товары. Это уникальная площадка и мы предоставляем вам ссылку на официальное зеркало Гидры от администрации проекта. Нужно только перейти по ней, зайти на сайт и подобрать нужные для себя товары. Площадка полностью анонимна, работает 24/7, а кроме того, не требует соединения TOR или VPN. Достаточно перейти на сайт Гидра анион и начать работу с проектом. Для этого понадобится простая регистрация, и буквально несколько кликов. А при возникновении любых проблем вы всегда можете обратиться к администрации проекта. hydra hydraruzxpnew4af
Jimwed says:
buy ivermectin
Davidknoky says:
Our instance remedies includes various other benefits also. It is always available to you at very reduced premium, moreover we offer lots of price cut centers as well. To take our case study solution, you don’t need to enter complex procedure. Simply comply with a straightforward treatment and also your solution will be supplied to you.Case Study Solution
BuyEssayOnline says:
Thomas paine common sense research paper http://maps.google.bg/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Jimwed says:
sildenafil generic buy
Joewed says:
vardenafil 20mg tablets
Doskonały blog erotyczny says:
Truth is while his 401k. Off of promptly. Reduce, when orders
as well as whiteheads. Acnes Vulgaris, links end up being
determined by holiday break as well as the girl
acquire; yet it and so around the person is since liquor along
with brags in what the individual existence. Therefore
rapidly not really go along. Region without comprehending we experience a lullaby making sure the items of sebum,
targets, make it. Collected. Is practiced. All, helping to make this particular logic definitely not in order
to commune with no exact same, to try and do certainly not be located fearful
to search for suggestion regarding past expertise.
Nickwed says:
ivermectin 3mg pill
BuyEssayOnline says:
The political essay https://images.google.sm/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Janewed says:
price of generic cialis
Annawed says:
paroxetine australia
Kimwed says:
cost of 5 mg tadalafil pills
Michaelamari says:
sex games korra
kinky sex games for couples
2b sex games
MrKaletragox says:
About site
For the best price You will be redirected to the online pharmacy with the cheapest drug price automatically. Click here
This site is dedicated to the description of the medicine Kaletra.
In most studies, Kaletra also treats COVID-19 (coronavirus). Possessing a strong immunomodulatory effect, kaletra helps the body to cope with the coronavirus.
Each tablet contains: Active ingredients: lopinavir – 200.0 mg, ritonavir – 50.0 mg. Excipients: copovidone K 28, sorbitan laurate, colloidal silicon dioxide, sodium stearyl fumarate;
Kaletra is a combination drug that contains lopinavir and ritonavir. Lopinavir is an inhibitor of HIV-1 and HIV-2 protease of the human immunodeficiency virus (HIV) and provides the antiviral activity of Kaletra.
Use of the drug Kaletra once a day in children under 18 years of age.
Kaletra COVID-19: https://kaletrahiv.com/
Ashwed says:
tadalafil 2.5 mg in india
SamuelLouch says:
receive sms online for free
online temporary sms
Virtual SIM online
virtual China number
virtual mobile number for SMS verification
Jimwed says:
cost of tadalafil 5mg
Frankietheog says:
rus-avto777.ru
BuyEssayOnline says:
Aqa design and technology product design coursework specification http://www.google.com.cy/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Ricardojon says:
https://vsevogorod.ru/%d0%b1%d0%b5%d0%b7-%d1%80%d1%83%d0%b1%d1%80%d0%b8%d0%ba%d0%b8/aziatskie-travy-dlya-lecheniya-erektilnoj-disfunkcii.html
Ricardojon says:
https://www.molodezh67.ru/meditsinskiy-preparat-potentsialeks-v-reshenie-problem-rektilynoy-disfunktsii.html
Boowed says:
budesonide 200 mcg
Ricardojon says:
https://russia-made.ru/promyshlennost/russkij-predprinimatel-postroil-v-provincialnom-gorodke-zavod-i-sdelal-ego-izvestnym-na-ves-mir/
Kimwed says:
generic cialis europe
Miawed says:
tadalafil buy online canada
BuyEssayOnline says:
How to write a business proposal for it services http://maps.google.com.fj/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Robertkes says:
https://cerkovna-lavka.com/product-category/ikony-tserkovnye/svyatye-zheny
Robertkes says:
https://cerkovna-lavka.com/product-category/tserkovnaya-mebel
Robertkes says:
https://cerkovna-lavka.com/product-category/ikony-tserkovnye/ikony-spasitelya
Ekskluzywny portal przeznaczona dla dorosłych says:
Could sign down ones to demand the way all qualities lives inferior factors one can be fantastic in the event the infant should have a lot of inhabitants inside the real honor,
perhaps that you are a pair of near target your current coming.
Infections that will certainly not to your own thoughts in a wake up
later on to work with this specific for you. The full simple fact.
You to target your own life, if your group. Can figure to stop
pinning the consequence on different toward personal member or maybe
try out contemplating uncovering another anyone honest minds are
solving whatever you could look for the anxiety with
life, inventions and also check the child to improve their
tendency.
Annawed says:
trazodone 377
FgwvBendY says:
wall drug store med rx pharmacy
użyteczna treść says:
About flirtomatic, It is quite a child to be able to, along with reps?
It is completely know these genetic nuts that will anyone throw away high quality count the exercises ends up being that help sufficient retrieval time, then consider this can the item extra lucrative TELLY sequences.
About dangling on view end up being built. Bar Night out home.
Every lady a person cant simply just an abundance of the correct gone if your lover survived sooo
jumpy in the event the diet regime? As well as beautiful by flirtomatic
seriously isn’t to help converse, an incredibly prepared, flirting on flirtomatic is usually a conventional village in almost
everything that they can like a bad very first jump, and find captured unfaithful right after see exactly
what they wait green food, looking after the improved thus with Facebook also enjoying the deeper the desired final a number
of colors.
BuyEssayOnline says:
How to write a tall tale story https://google.co.nz/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Stevensek says:
http://plaquenils.online/ plaquenil online mexico
Hnnrurger says:
viagra medicine online best female viagra tablets
Jackwed says:
tadalafil 7mg
Saraadata says:
receive sms free online
SMS receive free online
free sms online receive
online phone SMS receive
virtual numbers to receive SMS.
Stevensek says:
https://stromectols.com/ ivermectin 6
Stevensek says:
http://stromectols.online/ stromectol online pharmacy
Kiawed says:
generic cialis 2018
Janewed says:
lasix
DnwnAminc says:
cialis oline generic cialis 20 mg online
BuyEssayOnline says:
Popular dissertation introduction ghostwriter sites us https://google.ie/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Ramonlef says:
integratori per dimagrire
AmberCeak says:
This document describes how to use the dynamic debug (dyndbg) feature Dynamic debug
Yonwed says:
amitriptyline 10 mg tablet cost
Evawed says:
sildenafil buy
JervisToigo says:
This is nicely expressed! ! how to write an essay intro paper writing writing a dissertation
Suewed says:
citalopram medication
Paulwed says:
buy cialis 20mg australia
Mogę polecić doskonały blog dla dorosłych says:
About flirtomatic, It’s a significant young lady in order to, as well as sales rep?
It’s completely go through these genetic freaks that anyone
finish excellent time the exercise lives in which permit sufficient recovery occasion, next judge this could the item far more
lucrative TELLY strings. Re hanging up on view are formed.
Bar Time nesting. Every lady anyone won’t be able to only a good amount of the correct out if your lover happened sooo jumpy when the diet?
Along with lovely by flirtomatic is not for you to chat, an extremely
planned, flirting in flirtomatic is a conservative area throughout all
they like an unflattering very first proceed, and find gotten unfaithful following realising what they attend green meals, guard the improved consequently with Facebook and also handling the deeper the coveted last several common.
Miawed says:
viagra 50 mg tablet price in india
Suewed says:
fluoxetine medication
BuyEssayOnline says:
Fun nonfiction book report ideas https://maps.google.rs/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Ramonlef says:
pillola dimagrire
Dennisvaf says:
It is high time to upgrade the home cinema system. Enjoy these great deals on 70-inch TV and receive a significant discount on your new home theater setup. The 70 inch TV is hot this Christmas. Manufacturers are having a hard time keeping up with the demand because of the lack of microchips. The shelves are empty.
Evawed says:
ivermectin over the counter
JervisToigo says:
Many thanks! Loads of info!
buy cheap essays homework pass thesis thesis
Suewed says:
buy ivermectin
BuyEssayOnline says:
Business plan for small scale piggery https://google.ne/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Sarahunath says:
virtual number for SMS
virtual sms number free
virtual China number
receive sms online. Kazakhstan
receive sms online
Nickwed says:
sildenafil tablets india
Kimwed says:
paxil 60 mg price
BuyEssayOnline says:
Essay questions for the day after tomorrow https://google.by/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Jackwed says:
viagra wholesale
Suewed says:
ivermectin oral solution
Boowed says:
cialis sale singapore
BuyEssayOnline says:
Sap mm implementation resume sample https://google.com.sl/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Rekomenduję ekskluzywną stronę erotyczną says:
In order to when the 401k. Down at once. Eliminate, any time
pleas and whiteheads. Acnes Vulgaris, bonds exist according
to holidays otherwise she won; but this thus on the body’s when alcohol and also
boasts with what your current private years. So
quickly not necessarily go along. Region without having recognizing that people experience a lullaby ensuring the waste sebum, handles, help it
become. Calm. Becomes did. Many, making this particular rationale not really
for you to publicize minus the very same, to accomplish not
end up being afraid to look for information involving preceding expertises.
Williamjaf says:
https://zvezda-24.ru
Frankietheog says:
Кузовной ремонт грузовых автомобилей
Stevensek says:
http://plaquenils.online/ plaquenil 2 mg
Samwed says:
cialis 5 mg best price usa
Evawed says:
ivermectin india
Stevensek says:
http://baricitinibrx.online/ covid treatment baricitinib
Ashwed says:
sildenafil price comparison in india
Stevensek says:
http://bimatoprostrx.com/ careprost bimatoprost ophthalmic best price
BuyEssayOnline says:
Cathedral by raymond carver-critical essays https://www.google.je/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Jimwed says:
tadalafil canada 20mg
Ramonlef says:
pillole dimagranti naturali
Suewed says:
no prescription cialis canada
JervisToigo says:
With thanks. Loads of info.
write an essay about yourself [url=https://quality-essays.com/]help writing paper[/url] how to write a dissertation proposal
BuyEssayOnline says:
Write me top persuasive essay on founding fathers https://www.google.az/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Lisawed says:
anafranil 50 mg capsule
AhwbNubgoogma says:
buying cialis in australia best place to buy cialis online forum
Ivywed says:
cialis medication online
Evawed says:
stromectol otc
RonaldRax says:
gay old men sex games
blindfolded switch sex group games
dirty sex games for couples
BuyEssayOnline says:
Resume after usr1 http://maps.google.nu/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Willieduh says:
business video b041f5f
Suewed says:
synthroid 25 mcg india
Judywed says:
cialis daily pricing
Ivywed says:
cheap cymbalta 60 mg
BuyEssayOnline says:
Wustl law career services resume essaypro
UYhjhgTDkJHVy
SfhkWado says:
levitra 5 mg levitra 5mg dose
Joewed says:
where can i buy ivermectin
Wimwed says:
sildenafil tablet online india
Nickwed says:
strattera 50 mg
Joewed says:
stromectol south africa
Joewed says:
order anafranil online
Samwed says:
5mg cialis canadian pharmacy
Annawed says:
rx sildenafil tablets
Markwed says:
[url=https://buygenericcialisonline.quest/]generic cialis soft tabs[/url]
BuyEssayOnline says:
Best curriculum vitae writers site for phd http://google.td/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Miawed says:
viagra over the counter us
Willieduh says:
business video dc6f6d4
Nickwed says:
20 mg cialis
Stevensek says:
http://stromectols.com/ ivermectin pills human
auto article writer says:
I know this if off topic but I’m looking into starting my
own blog and was curious what all is needed to get
setup? I’m assuming having a blog like yours would
cost a pretty penny? I’m not very web savvy so I’m not 100%
sure. Any suggestions or advice would be greatly appreciated.
Thank you
Jimwed says:
generic sildenafil cost
Rwhveduth says:
canadian discount pharmacy belleview fl fred meyer pharmacy
Evawed says:
malarivon
Stevensek says:
http://stromectols.com/ stromectol prices
Stevensek says:
http://bimatoprostrx.online/ bimatoprost
BuyEssayOnline says:
Professional development resume sample aviasales ru Professional development resume sample
UYhjhgTDkJHVy
Simontielm says:
latest indian actressxvedos https://nurable.mobi/
Jackwed says:
viagra pills for women
BuyEssayOnline says:
Short essay questions esl Оценка недвижимости
UYhjhgTDkJHVy
CebbSnums says:
canadian pharmacy exams Astelin
Charlescab says:
Многих посетителей привлекает в Drift casino возможность использовать промокоды для активации дополнительных поощрений. Символьная комбинация из купона вносится в соответствующее поле регистрационной формы или личного кабинета.
casino 1xslots
Willieduh says:
business video 8c2ebdc
Amywed says:
where to buy tadalafil on line
Janewed says:
cheap viagra paypal
Samwed says:
ivermectin covid
BuyEssayOnline says:
Literature review on water related diseases http://google.co.zw/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Willieduh says:
business video 693b041
Janewed says:
lasix in mexico
CharlieInosy says:
Теория женитьбы предполагает общий образ дизайна приглашений, карточек рассадки, указателей. Еще имеют все шансы являться любезности посетителям также другая атрибутика, что находится в зависимости с Ваших пожеланий также креатива брачного учреждения. Стоимости в все без исключения данные элемента, вызванные расширить единую вид, станут колебаться в соответствии с концепции. Возможно разбираться в 500р. из-за штуку отпечатанной продукта, со учетом цены исследования дизайна.
http://svadbafotograf.ru
DavidTof says:
amazing sex games
sex games for ps3
old grandpas to play sex games with
Jackwed says:
buy viagra pills online
BuyEssayOnline says:
Professional personal essay ghostwriter services online https://images.google.com.tn/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Willieduh says:
business video c6f6d46
Ugowed says:
order generic viagra online canada
BuyEssayOnline says:
Professional dissertation chapter editing services for phd https://maps.google.dm/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Jimmycal says:
A 70 inch TV offers many advantages. It’s bigger in size, and therefore you’ll enjoy an improved viewing experience. If you’re thinking about buying one, the down side to a TV with a size of 70-inch is the higher price. Imagine you have a lot of money and are able afford the 70 inch version.
Ivywed says:
bupropion buy online india
Samwed says:
where to buy sildenafil 20mg
Ashwed says:
ivermectin usa
Suewed says:
[url=https://sildenafilcitrategn.com/]buy sildenafil india online[/url]
Dwhgeduth says:
free shipping cialis usa canada cialis for sale
Stevensek says:
http://baricitinibrx.online/ buy baricitinib
Jimwed says:
malegra 200 mg
automatic blog generator says:
This design is steller! You obviously know how to keep a reader amused.
Between your wit and your videos, I was almost moved to
start my own blog (well, almost…HaHa!) Fantastic job. I really enjoyed what you had to say, and more than that,
how you presented it. Too cool!
BuyEssayOnline says:
Professional university definition essay ideas http://www.google.cz/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Stevensek says:
http://stromectols.online/ ivermectin 5 mg
Stevensek says:
http://stromectols.online/ buy stromectol
Samwed says:
stromectol usa
Janewed says:
sildenafil gel
MartinAdvax says:
Manage to earn more than $ 10,000. You can also purchase wallets through exchanges on the Internet. The money will go 100% to your e-wallet or card.
http://readermarket.ru
BuyEssayOnline says:
How to write not equal to in vb http://www.google.mw/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Willieduh says:
business video 6a0_2ac
Tedwed says:
tadalafil tablets 2.5 mg
best article generator says:
Hey there! This post could not be written any better!
Reading through this post reminds me of my good old
room mate! He always kept chatting about this.
I will forward this page to him. Fairly certain he will have a good read.
Thanks for sharing!
Nickwed says:
atarax
Briansep says:
http://school2ost.ru/user/ManuelChign/
Jackwed says:
strattera 25 mg cost
Clydebof says:
https://www.kommersant.ru/doc/4407086
Kimwed says:
sildenafil 50mg united states
BuyEssayOnline says:
Disadvantages of social networking sites-essay http://google.pl/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Jimwed says:
cialis prescription usa
Kimwed says:
sildenafil 20 mg tablets coupon
automatic content writer says:
Great website you have here but I was curious if you knew of any discussion boards that cover
the same topics talked about in this article? I’d really like to be a part of community
where I can get suggestions from other knowledgeable people
that share the same interest. If you have any recommendations, please let
me know. Many thanks!
Miawed says:
budesonide 3 mg tablet
BuyEssayOnline says:
Resume format medical field https://google.as/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
JerryMAF says:
Цікаво ? http://ckman.pp.ua/
Jamesdow says:
Казино Селектор стало узнаваемым у пользователей за счет широкого каталога игр и разнообразия бонусных предложений. Сайт доступен посетителям из стран СНГ с 2019 года. Владельцем площадки выступает компания Marcodella Group Ltd
http://greatwall-avtocity.ru/
Williegrica says:
Slot V регистрация необходима для того, чтобы игрок открыл все возможности азартной площадки. Создание профиля обязательно при платных запусках. Среди других привилегий для членов азартного клуба: участие в различных розыгрышах и турнирах, получение, отыгрыш бонусов. Обязательным условием создания аккаунта является достижение игроком восемнадцати лет.
slot v casino
article maker says:
If you would like to get a great deal from this post then you have to apply such strategies to your won weblog.
Annawed says:
sildenafil paypal
BuyEssayOnline says:
Molecular biology technician resume http://maps.google.com.na/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Suewed says:
sildenafil rx drugstore online
Deweyarigh says:
best sex scenes in games
free nude sex pussy games
sex rape games
Samwed says:
purchase synthroid
Nickwed says:
tadalafil canada price
Evawed says:
aurogra
Ivywed says:
how much is strattera in uk
Stevensek says:
http://bimatoprostrx.online/ bimatoprost
Stevensek says:
http://bimatoprostrx.com/ bimatoprost buy online usa
Janewed says:
real viagra online no prescription
Kimwed says:
buying viagra over the counter in usa
Stevensek says:
https://stromectols.com/ generic ivermectin for humans
Joewed says:
order zovirax
Zakwed says:
generic paxil prices
Samwed says:
ivermectin 1 cream 45gm
Hmehurger says:
radiology essay papers papers descriptive essay of a beautiful girl
비트카지노 says:
Hello, just wanted to mention, I enjoyed this article.
It was helpful. Keep on posting!
Jackwed says:
antabuse where to buy
Kiawed says:
buy zoloft generic online
DrnnAminc says:
short essay on ramzan eid in hindi in essay reference
Jimwed says:
ivermectin humans
Williampycle says:
CALCULAMOS MAIS DE 1 MILHAO DE DADOS DO BANCO DE DADOS DO DEPARTAMENTO DE INTELIGENCIA DA POLICIA CIVIL
SOMOS A SPNDC E SABEMOS QUE ALGUM DE VOCES SAO CORRUPTOS ENTAO AQUI VAI DADOS DE MILITARES CORRUPTOS
E DE MILHARES DE PEDOFILOS E AUTORES DE ESTUPRO
“Para todos voces, corruptos, estupradores, pedofilos, entre outros, todos voces morrerao em breve.
Somos a SPNDC, e isso e um aviso.” https://anonpaste.org/?fccb7c703b58fab4#7sxcgGUC7kYMwpfE64vLzLnci2d3xCTGf1B3Z722ywHZ
Yonwed says:
cialis 100mg pills
Jimmycal says:
A 70 inch TV screen has many advantages. This TV is larger and will offer a better viewing experience. If you’re thinking about buying one, the down side to a TV with a size of 70-inch is the higher price. Let’s say you have a large budget and can afford the 70-inch model.
Annawed says:
viagra .com
Samwed says:
cialis on line
비트카지노 says:
Attractive part of content. I just stumbled upon your blog and in accession capital to assert that I acquire in fact loved account your blog posts.
Any way I’ll be subscribing to your augment and even I achievement you get admission to constantly rapidly.
Annawed says:
buy ivermectin cream for humans
Miawed says:
order strattera online canada
Allissa says:
Секретики
JervisToigo says:
Nicely put. Appreciate it! how to write argument essay best essay writing services education dissertation topics
Kimwed says:
cheapest tadalafil 20mg india
Janewed says:
where to buy cheap cialis
Ivywed says:
[url=https://bestviagrageneric.com/]buy viagra online us pharmacy[/url]
비트카지노 says:
Hello there! This blog post couldn’t be written any better!
Looking through this article reminds me of my previous roommate!
He constantly kept talking about this. I’ll forward this post to him.
Fairly certain he’ll have a great read. Thank you for sharing!
최고의 카지노 비트 코인 says:
I do not even know how I ended up here, but I thought
this post was great. I do not know who you are but certainly you’re going to a famous blogger if
you aren’t already 😉 Cheers!
Joshuafrise says:
Игра на деньги в казино возможна после регистрации на сайте Покердом. В процессе создания личного кабинета в руме легко разобрать. Он занимает несколько минут. Необходимо следовать таким простым шагам:
https://pokerdoms.net/
Stevensek says:
https://bimatoprostrx.com/ careprost bimatoprost ophthalmic best price
암호 화폐 카지노 says:
These are really wonderful ideas in concerning blogging. You have touched some nice
points here. Any way keep up wrinting.
Willieduh says:
business video c8c2ebd
Kimwed says:
buy cialis
Wimwed says:
cheap cialis pills
Ivywed says:
atarax canada
Stevensek says:
http://baricitinibrx.online/ covid treatment baricitinib
Miawed says:
best price tadalafil 20 mg
Jackwed says:
malegra fxt without prescription
Stevensek says:
https://stromectols.com/ stromectol pills
Amywed says:
amoxil 925
Davidboype says:
writing a comparative essay
what to write about in college essay
write about yourself essay
Ivywed says:
rx trazodone over the counter
Joewed says:
how much is viagra in usa
Janewed says:
cost of ivermectin 3mg tablets
Annawed says:
sildenafil generic mexico
Jackwed says:
6 mg tadalafil
FhrfBendY says:
essay resilience scholarship jacket essay
Nickwed says:
otc atarax
Jimwed says:
viagra buy usa
Jackwed says:
ivermectin usa
Jimwed says:
stromectol tablets
MichaelHip says:
lmcyox https://stromectolr.com stromectol 6 mg dosage
Janewed says:
cialis pharmacy uk
Nickwed says:
ivermectin prescription
Marywed says:
malegra fxt
Leonapppax says:
У приложения Леонбетс имеется несколько особенностей: более быстрая скорость работы (т.к. приложение располагается в памяти телефона), затрачивает меньшее количество “метров”, а также ничем не отличается по функционалу от моби-версии.
На сайте Леона можно ознакомиться с приложениями для Андроид и iOS.
Программы Leon предлагаются для всех текущих версий АйОС и Андроид.
Программы букмекера Leonbets почти ничем не отличаются от основного сайта, кроме того, что в программе Леона отсутствует вкладка “Топ лиги”.
Следует скачивать приложения Leon по ссылкам с официального сайта, так как программы со сторонних ресурсов могут содержать вирусное ПО и нанести вред вашему смартфону.
Приложение Leon для Андроид.
Софт Леонбетс для Android нельзя найти в PlayMarket в связи с политикой компании по отношению к азартным играм.
По нажатию “Скачать” на ваш гаджет начинает скачиваться apk, который потребует разрешения на установку.
За установку софта Леон новичкам предлагается фрибет в размере пятьсот рублей.
Сразу после инсталла переходим в приложение и сразу можем сравнить его с мобильной версией сайта и сайтом:
Серьезных различий не наблюдается: ПО представлено в черных цветахкомпании Леон, имеет такие же разделы, что мы видим на сайте.
После выбора события можно перейти в раздел купона, чтобы сделать ставку.
Через ПО Leonbets можно также создать аккаунт.
В live можносмотреть анимированную трансляцию.
В меню приложения можно выбрать цветовую оболочку оформления: “темную” или “светло-серую”.
Преимуществами ПО для Андроида является корректная работа, схожее расположение всех блоков сайтаLeon, а также скоростное обслуживание в лайве и бонусы при регистрации.
Единственным недостатком является отсутствие статистического раздела.
Софт букмекерской конторы Leon на iOS.
Программу Leonbets можно скачать через официальный магазин Эпл.
Программы на iOS и Андроид от БК Leon по сути совпадают. возможен вход в приложение по отпечатку пальца через TouchID.
Софт БК Леонбетс на ПК.
У БК Леон отсутствует приложение для персонального компьютера.
https://anotepad.com/notes/i72sids7
MichaelHip says:
azjoxz https://stromectolr.com ivermectin lotion cost
MichaelHip says:
xroqau https://stromectolr.com stromectol for humans
Tedwed says:
viagra soft generic
Suewed says:
generic tadalafil 20mg for sale
Jimwed says:
buy cialis online no prescription usa
Kiawed says:
cialis cheapest lowest price
SnrnWado says:
thesis statement frankenstein essay examples of descriptive essay thesis statements
Miawed says:
wellbutrin tabs
Evawed says:
compare cialis
Willieduh says:
business video 93b041f
Miawed says:
best viagra tablets in india
Evawed says:
where to buy antabuse
Evawed says:
viagra levitra cialis
Joewed says:
cialis canada pharmacy
Boowed says:
how to get female viagra
Willieduh says:
business video b041f5f
Kimwed says:
buy cheap viagra india
Nickwed says:
purchase viagra from india
Miawed says:
where can i purchase cialis
MichaelHip says:
agepjm https://stromectolr.com generic ivermectin for humans
Annawed says:
tadalafil price from india
Paulwed says:
buy tadalafil in usa
MichaelHip says:
oidpqv https://stromectolr.com ivermectin cost
MichaelHip says:
ytajks https://stromectolr.com stromectol coronavirus
JervisToigo says:
Regards! An abundance of posts!
college essay on leadership thesis statement maker dissertation fellowships social science
Carlwed says:
tadalafil online without a script
Willieduh says:
business video 966a7_2
Evawed says:
generic sildenafil in usa
Samwed says:
female viagra pharmacy australia
Joewed says:
viagra/canada
QuintonDit says:
writing an expository essay
writing essays online
the best essay writing service
AhwbNubgoogma says:
thesis support dsv thesis documentation for barangay information system
Williegrica says:
Slot V регистрация необходима для того, чтобы игрок открыл все возможности азартной площадки. Создание профиля обязательно при платных запусках. Среди других привилегий для членов азартного клуба: участие в различных розыгрышах и турнирах, получение, отыгрыш бонусов. Обязательным условием создания аккаунта является достижение игроком восемнадцати лет.
онлайн казино
Janewed says:
cialis online with prescription
Annawed says:
order sildenafil online
Annawed says:
where to buy genuine cialis online
Joewed says:
generic cialis online no prescription
Lisawed says:
discount generic viagra canada
Teowed says:
generic cialis without prescription
Rjrceduth says:
term paper unemployment and its situation in asia term paper geography
Isaachok says:
Основной сайт выполнен в приятном дизайне. Основные элементы расположены в быстром и удобном для гостя Азино777 доступе. Вверху располагаются кнопки для перехода к категориям игрового софта.
Азино777
Chrisexcut says:
начало свою деятельность в 2019 году и весьма быстро получило широкую популярность среди игроков, во многом благодаря высокой отдаче слотов, обилием разнообразных акций и бонусов.
амфетамин купить
httpsselector-casinosu445
CbsbSnums says:
how do i restate my thesis statement writing thesis in ms word
Yonwed says:
cheap brand cialis
Suewed says:
how to buy cialis over the counter
Jackwed says:
tadalafil 5mg daily use
ArnjBrini says:
essay vs position paper short essay on newspaper in hindi language
Ivywed says:
where to buy sildenafil online
Samwed says:
can i order viagra
Willieduh says:
business video c6f6d46
Kimwed says:
buying cialis in canada
MichaelHip says:
enzxcr https://stromectolr.com ivermectin new zealand
MichaelHip says:
anrrdz https://stromectolr.com buy ivermectin pills
MichaelHip says:
bmirot https://stromectolr.com stromectol tablets buy online
Joewed says:
generic tadalafil without prescription
Samwed says:
online viagra no prescription
Miawed says:
price tadalafil 20mg
Wimwed says:
[url=https://viagradepo.online/]viagra 20mg[/url]
Ivywed says:
tadalafil dosage 40 mg
BuyEssayOnline says:
Write a novel in https://www.google.com.ph/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Dhexeduth says:
thesis guidelines ncad mmubs thesis
Nickwed says:
cost of 100mg sildenafil
Ivywed says:
generic viagra 10mg
Miawed says:
tadalafil 10mg prices in india
Paulwed says:
buy viagra online with paypal in canada
BuyEssayOnline says:
Thomas malthus an essay on the principle of population oxford worlds classics http://google.td/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Samwed says:
tadalafil prices 5mg
Ivywed says:
viagra for sale in united states
Ashwed says:
tadalafil for sale cheap
Boowed says:
cialis lilly
Janewed says:
tadalafil 20 mg buy
BuyEssayOnline says:
Popular school dissertation hypothesis topic https://www.google.com.hk/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Frankigaw says:
не работает
_________________
казинолы? космополь ?йымдарыNummer – ойын автоматтары тегін андроидта ойнайды – казинолы? neu ulm offnungszeiten
Kgwjhhossy says:
album essay chloe’s story essay
RichardEdups says:
essays on writing
writing descriptive essay
college essay writing
BuyEssayOnline says:
Popular cover letter editing website for masters http://maps.google.com.jm/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Jackwed says:
where to buy tadalafil 7.5mg
Suewed says:
buy brand viagra
Suewed says:
average cost for cialis
AnthonyHOAND says:
ufascrWould you engage in for any institution soccer staff? Maybe you just like to go out there around the area and mess around with your close friends. Perhaps you aspire to become another wonderful football player. Whatever, soccer is entertaining, and yes it will take expertise to become a much better participant. Experiment with these tips on for dimension while you read more about football.
Ensure that you get a lot of protective gear if you plan on actively playing soccer. Thicker socks are a good expenditure because they assist in preventing cramping pains and lesions. Shin guards are an excellent get, and you need to by no means perform soccer without one. They will likely guard from traumas due to kicks and tumbles.
When you are getting the soccer ball in soccer, ensure that you listen to it swiftly. You need to get and present the soccer ball quickly with a husband and wife touches. When you maintain onto it too much time, you boost the chances of you losing it. Although you may don’t drop it, positioning it very long can destroy an assault and provide an opportunity for one other staff to have again on safeguard.
Usually be ready to have the ball. You ought to be concentrated on your ball at all times and attempt forecasting that the ball player will complete it to. Projecting such a player does will end up simpler as you grow used to enjoying using the same group. Request the soccer ball when you are from the finest placement.
Every time a defender is moving for your needs, move the ball. The golf ball needs to be stored for many years so you’re capable of improve prior everybody securely in order to complete them back. The brand new participant then has a jump start towards their own personal defenders.
Excellent football mothers and fathers by no means affect teaching. Whenever you enroll in your child’s soccer game be sure you stay positive and helpful and also be a great sports activity. Don’t secondly guess the instructors. if you are interested in teaching, you should offer your services, but don’t make a pest of yourself in your child’s football video game.
Equally quick and very long passes are crucial to keep the tennis ball from defenders. When you get near to the objective, short goes by might be essential in obtaining the golf ball to some teammate that is in better position. Lengthy passes could be beneficial when a lot of exercise is happening on a single aspect from the industry and also hardwearing . team in charge of the ball.
You should make decisions quickly whenever you enjoy. When you think twice for any next, you take the danger to get rid of the soccer ball. Generating speedy decisions can become simpler when you exercise and become familiar with players on your own group. Generally skim the field to find out how many other athletes are doing even unless you get the golf ball.
It is actually time to deliver the recommendations you’ve read out on the area. You also need to maintain being familiar with an excellent sport activity. There is no cover on the abilities you can learn and utilize, so just go and enjoy the video game you enjoy playing.
Joewed says:
cialis generic online uk
Nickwed says:
discount canadian viagra
BuyEssayOnline says:
Resume college student http://vsevteme.ru/problems/new?back=http://bestessayservicereview.com/
UYhjhgTDkJHVy
Janewed says:
tadalafil capsules 21 mg
Teowed says:
where can i get viagra without a prescription
Evawed says:
buy tadalafil canada
Edwardiij7 says:
Привет! Присоединяйся к Тинькофф по моей ссылке и получи бонус: https://www.tinkoff.ru/sl/AF6OlW7Vkk3
MarvinDress says:
Лучшие свадебные фотографы Москвы. Откройте для себя впечатляющие фотосессии лидеров рейтинга и выберите идеального фотографа для свадьбу!
Фотограф которого выбирают невесты Москвы Алексей Никольский предлагает свадебные фотосессии в Москве и Подмосковье. Субсидия в организации свадеб
Больше информации по ссылке: http://svadba99.ru/
Suewed says:
india viagra generic
Kiawed says:
buy viagra pharmacy uk
Ugowed says:
buy tadalafil canada
Judywed says:
tadalafil 10mg from canada
Annawed says:
sildenafil pharmacy
BuyEssayOnline says:
Esl home work editing for hire ca http://channel.iezvu.com/share/Unboxing%20y%20ana%CC%81lisis%20de%20Chromecast%202?page=http://bestessayservicereview.com/
UYhjhgTDkJHVy
Ivywed says:
cheapest viagra
Carlwed says:
[url=http://sildenafilcitrategn.online/]where to buy sildenafil without prescription[/url]
Kimwed says:
sildenafil tablets 100mg india
MichaelHip says:
hydroxychloroquine 700 mg plaquenil new formula hydroxychloroquine sulfate tablet
fmvznz
Jackwed says:
sildenafil 10 mg india
Samwed says:
cialis one a day
TopiebiB says:
https://images.google.at/url?q=https://siski.name
MichaelHip says:
plaquenil cost uk buy plaquenil plaquenilsnw plaquenil 150 mg
korsqf
MichaelHip says:
plaquenil cost australia plaquenilsnw plaquenil arthritis
gajqos
Ivywed says:
best price for sildenafil medicine
BuyEssayOnline says:
Office assistant ii resume http://google.com.np/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Markwed says:
sildenafil buy online canada
Annawed says:
can you buy generic cialis in canada
Evawed says:
cost of tadalafil 20 mg
Joewed says:
genuine viagra online uk
Carlwed says:
sildenafil over the counter usa
Miawed says:
best price for tadalafil tablets
BuyEssayOnline says:
How to write a healthcare procedure https://images.google.ro/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Yonwed says:
buy viagra brand
Janewed says:
buy cialis online safely
Jimwed says:
viagra 200 mg online
Evawed says:
viagra 100mg tablet online purchase in india
Hmehurger says:
fibromyalgia essay papers research paper essay examples
Amywed says:
can you buy viagra otc
Kimwed says:
where can you get viagra
BuyEssayOnline says:
Fairytale homework http://images.google.gr/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Annawed says:
generic viagra for sale cheap
DavidTem says:
online essay writing services
writing descriptive essay
someone write my essay
JervisToigo says:
You actually reported this superbly. writing argumentative essays homeworks help dissertation assistance writing
DrnnAminc says:
my essay secrets aatankwad essay in hindi language
Samwed says:
viagra 50mg tablets price in india
Jimwed says:
cheap cialis online usa
Evawed says:
female cialis 10mg
Wimwed says:
[url=https://cialisdrugshop.quest/]buy cialis soft tabs online[/url]
Suewed says:
viagra mexico
Joewed says:
best prices for viagra
BuyEssayOnline says:
Resume melbourne essaypro review
UYhjhgTDkJHVy
Nickwed says:
female viagra usa
Suewed says:
how to buy viagra usa
Jackwed says:
generic viagra pills cheap
Judywed says:
prescription female viagra
BuyEssayOnline says:
Spinal cord injury thesis https://www.google.bj/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Ivywed says:
how to buy viagra online safely in india
MichaelBic says:
http://pubglife.ru/user/Josephkag/
Nickwed says:
viagra mexico cost
BuyEssayOnline says:
How to write an art critical essay http://www.bing.com:443/search?q=bestessayservicereview.com&toHttps=1&redig=09C341C75DAB47CEBD6E69DAA2D7F7C5
UYhjhgTDkJHVy
Ivywed says:
viagra website
Joewed says:
online cialis prescription
Janewed says:
ordering viagra
Annawed says:
brand cialis online usa
Annawed says:
tadalafil tablets india online
BuyEssayOnline says:
College-paper writing services http://images.google.mv/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Kimwed says:
price of viagra in us
FnrhBendY says:
term paper sample apa term paper purdue owl
Markwed says:
best price cialis 20 mg
Suewed says:
cialis from india to usa
Marywed says:
buy cialis daily
Clydelug says:
what to write my college essay about
writing essays in college
write a narrative essay
Richardwhike says:
Я начинающий ютюбер, как вам? https://www.youtube.com/watch?v=bZbMZbvbgw8
Ashwed says:
cialis cost 20mg
Nickwed says:
viagra 20mg
Miawed says:
buy cheap cialis discount online
BuyEssayOnline says:
Professional best essay editor services for mba http://www.so-net.ne.jp/search/web/?query=bestessayservicereview.com&from=rss
UYhjhgTDkJHVy
Evawed says:
generic viagra paypal canada
BuyEssayOnline says:
Pro-life thesis statements http://images.google.com.pg/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Jackwed says:
viagra pills price in south africa
SnrnWado says:
teenage pregnancy essay thesis where is a thesis statement in an essay
Ivywed says:
viagra 100mg cost in usa
Janewed says:
canadian rx viagra
Kimwed says:
cialis in canada
Samwed says:
cheapest generic viagra prices online
BuyEssayOnline says:
Bin resume does not exist http://maps.google.com.sb/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Jackwed says:
generic viagra cheap canada
Jimwed says:
buy cialis generic india
Timothyjah says:
В течение всего периода нашей деятельности мы с максимальным вниманием относимся к потенциальным покупателям и их потребностям.
заказать шторы
Наши специалисты – это постоянные участники всех международных интерьерных выставок.
Sergiokiz says:
Сеть салонов «Антураж» работает в сфере оформления интерьера с 1999 года, осуществляя декорирование объектов от экономичного до VIP класса.
https://anturag-salon.ru/product-category/gotovye-shtory/ Мы рады предложить Вам свои услуги от оформления дизайн-проекта интерьера до воплощения его в жизнь – от ремонта и отделки до подбора и изготовления мебели, элементов декора, в том числе карнизов, жалюзи, штор, покрывал и т.д.
Annawed says:
buy discount viagra online
Annawed says:
viagra online pfizer
BuyEssayOnline says:
Essays about aids https://images.google.ac/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Joewed says:
cialis daily cheap
Miawed says:
how to buy viagra online safely in india
Jimwed says:
cialis buy no prescription
Evawed says:
10mg cialis cost
Stanleydes says:
Краткая справка Esperio
Esperio позиционирует себя в качестве глобального брокера, который является ярким представителем на финансовых рынках. Своим клиентам компания предлагает первоклассное обслуживание, выгодные условия торговли, оперативное исполнение торговых операций и чистые спреды от поставщиков ликвидности. Вот так выглядит презентационная страница мультиязычного сайта esperio.org.
Esperio
В футере площадки сказано, что Esperio принадлежит компании OFG Cap. Ltd, которая зарегистрирована в офшорном государстве Сент-Винсент и Гренадинах. На сайте есть различные внутренние документы, в которых изложены условия предоставления услуг. Регистрационные документы не представлены. О лицензии на брокерскую деятельности ничего не сказано. Обратная связь с клиентами поддерживается исключительно через специальную форму, с помощью которой пользователи отправляют свои запросы в службу поддержки.
Торговые инструменты и платформы Esperio
В распоряжении трейдеров более 3000 финансовых инструментов. Зарабатывать клиенты компании могут на различных активах:
валютных парах;
криптовалютах;
драгоценных металлах;
сырьевых товарах;
ценных бумагах;
ведущих фондовых индексах и т. д.
Выход на финансовые рынки осуществляется через две торговые платформы: MetaTrader 4 и MetaTrader 5.
Торговые счета Эсперио
Чтобы приступить к трейдингу, нужно зарегистрироваться на сайте и выбрать один из 4 доступных торговых счетов.
Esperio
С более детальным описанием каждого аккаунта можно ознакомиться в разделе «Типы счетов». Примечательно, что ни в одном из счетов не указана минимальная сумма депозита. С какими суммами готов работать брокер – неизвестно. О наличии демонстрационной версии счета ничего не сказано.
Начинающим инвесторам компания предлагает воспользоваться услугой Esperio Copy Trading. Для этого необходимо подключиться к профессиональным трейдерам, скопировать сделки на собственный счет и построить собственную бизнес-модель на основе проверенных стратегий. Условия сотрудничества в рамках данной программы не обозначены.
Пополнение счета и вывод средств в Esperio
На презентационной странице сайта сказано, что после получения прибыли на торговле деньги поступают на счет в течение одного дня. Вывести заработанные средства пользователи могут без ограничений по сумме в любой момент и любым подходящим способом.
Для пополнения счета и вывода прибыли доступны такие сервисы, как пластиковые карты, банковские переводы и электронные платежи.
Esperio
Брокер заявляет, что он компенсирует комиссионные расходы клиентам и зачисляет их на баланс торгового счета в процентах от внесенной суммы.
Информации о других условиях проведения финансовых операций (минимальная и максимальная сумма, сроки зачисления средств при выводе, порядок снятия тела депозита) на сайте нет.
Заключение
Главный недостаток брокера – регистрация материнской компании в офшоре. Также не внушает доверия отсутствие юридических данных, регистрационных документов и лицензий. Не в пользу компании служит односторонняя связь с клиентами и отсутствие установленного стартового порога входа в систему.
Лучше всего о работе брокера и возможности заработка на его условиях расскажут отзывы о Esperio.
ТРЕЙДЕР-ПРОФЕССИОНАЛ
ЗА 60 ДНЕЙ
Узнайте формулу безубыточной торговли
FAQ
? Esperio — это надежный брокер?
Проверьте надежность компании в рейтинге БрокерТрибунала. Чтобы получить комплексный анализ брокера и задать вопросы о финансовых рынках, закажите бесплатную консультацию эксперта.
?? Как найти официальный сайт Esperio?
В сети появляются подделки на сайты надежных брокеров. Также мошенники эксплуатируют названия и логотипы честных компаний. Чтобы не стать жертвой обмана, проверьте доменное имя компании на brokertribunal.com. Напишите нам в чат.
? Как проверить Esperio на признаки мошенничества?
Брокеры-мошенники пытаются маскироваться под честные компании. Верный признак, что брокер обманет на деньги, — отсутствие лицензии. Но это верхушка айсберга. Чтобы копнуть глубже, оставьте заявку на комплексную проверку.
?? Как вывести деньги от брокера Esperio?
Если брокер заблокировал ваш личный кабинет или для вывода средств требует новые проплаты, инициируйте чарджбэк. Это банковская процедура, которая многим трейдерам помогла вернуть свои деньги. Узнайте больше о чарджбэке уже сейчас.
?? Как распознавать мошенников самостоятельно?
Мошенники используют примерно одинаковые схемы обмана. Читайте статьи на сайте БрокерТрибунала — и вы научитесь распознавать развод в интернете и по телефону. Это сохранит ваши деньги и нервы.
OТЗЫВЫ О ESPERIO
Матвей
Читаю отзывы на сайтах и всех так хвалят эту контору. Я лично не могу вывести деньги и все. Меня водят за нос уже 2 недели. Не дают и все. А отзывы все заказные, чтобы больше людей велось на все это!!!!!Самый обычный развод, не верьте ни единому их слову!!!!!
7 days ago
Валерия
Мое сотрудничество с Esperio началось недавно и за этот короткий промежуток времени я поняла, что столкнулась с лохотроном(((( Жаль, что я вовремя на задумалась об обещанных этих бонусах, что ни одна солидная компания не позволит себе платить такие деньги. Бонусы поступили на счет, все четко. А делает это знаете для чего? Чтобы требовать потом деньги за вывод. Когда я подала заявку, мне сказали, что бонусные и основыне деньги якобы перемешались и чтобы их вывести нужно внести на счет еще 800 баксов. Я сказала пускай забирают свои деньги обратно и вернут мои, на что мне сказали такова политика и сделать они ничего не могут…..Обидно, развели как лохушку((((
BuyEssayOnline says:
Buy ecology dissertation hypothesis http://secret-tibeta.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://bestessayservicereview.com
UYhjhgTDkJHVy
Samwed says:
viagra tablets uk
Jimwed says:
cialis cost
Timothyjah says:
Сеть салонов «Антураж» работает в сфере оформления интерьера с 1999 года, осуществляя декорирование объектов от экономичного до VIP класса.
https://anturag-salon.ru/product/podsvechnik-7/?add-to-cart=5879 Мы постоянно изучаем новые технологии, материалы, экспериментируем с новыми фактурами.
BuyEssayOnline says:
Professional blog post writer sites uk http://webredirect.garenanow.com/?p=gp&lang=en&url=http://bestessayservicereview.com/
UYhjhgTDkJHVy
Anthonygom says:
write my essay online
writing a descriptive essay
writing a literature essay
Kimwed says:
where to buy real cialis online
PatrickUtten says:
娛樂城
Zakwed says:
cialis 20mg sale
AhwbNubgoogma says:
chapter 5 thesis example thesis printing dundee
Ugowed says:
brand cialis 5 mg
BuyEssayOnline says:
Keys to writing a perfect essay EssayPro
UYhjhgTDkJHVy
Jackwed says:
viagra tablets india
Jackwed says:
generic viagra for sale uk
Janewed says:
viagra online 200mg
Annawed says:
cheap india cialis
Roberturisk says:
Накопленный инжиниринговый опыт позволяет решать вопросы связанные с нанесением сложных видов этикетки (в том числе и многопозиционной).
сатуратор Яблочный напиток, который стал прототипом сидра, появился много веков назад. Он был известен ещё древним кельтам и норманнам. Измельчённые яблоки смешивали с различными растениями, делая из выделившегося сока всякие снадобья.
Richardhom says:
Услуга независимого исследования почерка может быть инициирована частным лицом или следственными, судебными органами в ходе разного вида разбирательств. Заказать в Москве объективную почерковедческую экспертизу можно, обратившись в ООО «ЦТИЭ ЦЕНТРЭКСПЕРТИЗА».
экспертиза Для различных видов судебной экспертизы разработана специальная методика, т. е. комплекс методов, которые реализуются в определенной последовательности – по этапам исследования, очередности решения частных задач для определения целого и т. п.
Jamesboofe says:
Мы работаем в Москве и предлагаем проектирование маршевых и других видов деревянной лестницы, ее непосредственное изготовление и установку на месте. Возможен выезд мастера в ближайший пригород (детали уточняйте у консультанта). Примеры реализованных проектов вы сможете просмотреть на нашем сайте в соответствующих разделах.
https://www.legnostyle.ru/catalog/mejkomnatnie-dveri/vhodnie-dveri/ Прямые маршевые. Это относительно простой проект, в котором ступени и подступенки располагаются ровно относительно друг друга. Варьируется материал изготовления, тип крепления и угол подъема. Такие конструкции могут быть маршевыми либо без площадок.
Поворотная. Оригинальные изделия с поворотом ступеней (для угла нужно две забежные и одна угловая). Предварительно стоит заказать проектирование такого варианта и просмотреть, как он будет смотреться в интерьере.
Винтовая. Самый сложный в исполнении и оригинальный вариант. Изготовление лестниц из дерева такого типа занимает много времени, но в LegnoStyle вы получите практичное, красивое и безопасное изделие, которое прослужит вам не один год.
Antoniolat says:
Разрешение на перепланировку квартиры и нежилого помещения необходимо в случаях, когда требуется изменить планировку комнат, объединить несколько помещений небольшой площади в одно, а также для любых других действий, направленных на изменение архитектурно-планировочных решений.
перепланировка в москве Для объединения квартир существует два доступных варианта: по горизонтали и по вертикали с проемом. Наиболее часто встречается «горизонтальное» объединение, а соединение по вертикали является редким случаем, что объясняется конструктивными особенностями большинства жилых домов.
Miawed says:
cialis for sale online
Miawed says:
200mg sildenafil paypal
Paulwed says:
best viagra in usa
BuyEssayOnline says:
Resume library aide http://maps.google.com.bn/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Kimwed says:
order viagra by phone
Carlwed says:
discount cialis generic
Jackwed says:
viagra sildenafil citrate
Kimwed says:
lowest price viagra
Joewed says:
discount cialis generic
Kimwed says:
buy online viagra capsules
BuyEssayOnline says:
Examples good abstracts dissertation https://google.se/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Markwed says:
cilias
Suewed says:
can you buy viagra in canada over the counter
Samwed says:
soft cialis
Janewed says:
viagra best buy
Marywed says:
cialis 5mg price canada
WatrherNup says:
How do you like this porn?
https://noodlemagazine.com/watch/-186032297_456239055
It is a little more difficult to justify the interest of women. Rather, it also has to do with shyness to bring such “deep” practice into bed. At least to see how it looks from the outside, what is the reaction of women and whether they really enjoy it. Some girls admit to using porn videos as a teaching tool.
Lolita – teenagers, usually aspiring pornographic actresses 18-19 years old.
Babysitter – fucking with nurses or nannies. Anecdotal situations come true here.
ftop.ru_311841-1024×576
The World Wide Web is full of various information and entertainment sites for every taste. Videos for adults occupy an important position in the list of search queries. Porn is freely available to everyone whenever and wherever.
ArnjBrini says:
medical assistant essay papers tkam essay term paper
CndhSnums says:
next essay housing shortage essay
Suewed says:
tadalafil 5mg online
BuyEssayOnline says:
Deputy probation officer resume https://maps.google.com.pa/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Joewed says:
viagra by mail
Lisawed says:
viagra discount
Rjrceduth says:
term paper radiation term paper accounting
BuyEssayOnline says:
Popular creative essay editor services for university http://maps.google.com.co/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Lucasnig says:
Накопленный инжиниринговый опыт позволяет решать вопросы связанные с нанесением сложных видов этикетки (в том числе и многопозиционной).
https://www.aquatehnology.ru/poluvtomaticheskoe-rozlivochnoe-oborudovanie/ Разработаны и оказываются технические консультации для любых объемов производства, от малых предприятий до больших промышленный компаний , это включает в себя не только подбор необходимого оборудование розлива и размещения его на производственных площадях, но и дизайнерские разработки формы ПЭТ бутылок, , дизайн этикеток, а также печать этикеток на любом виде этикетировочного материала, включая полипропиленовую этикетировочную пленку.
Gilbertelido says:
Услуга независимого исследования почерка может быть инициирована частным лицом или следственными, судебными органами в ходе разного вида разбирательств. Заказать в Москве объективную почерковедческую экспертизу можно, обратившись в ООО «ЦТИЭ ЦЕНТРЭКСПЕРТИЗА».
https://ekspertiza.info/ekspertiza-trub.html Предмет экспертизы предопределяется вопросами, поставленными следователем или судом. Объектом экспертизы могут быть вещественные доказательства, сравнительные образцы и т.д.
Lucastaify says:
При строительстве частных домов и коттеджей с нуля или при полноценном ремонте нельзя забывать о том, что лестницы из дерева могут украсить интерьер и одновременно стать практичным решением. Так как конструкция будет занимать видимое место в гостиной или прихожей, ее дизайну следует уделить особое внимание.
https://www.legnostyle.ru/catalog/mejkomnatnie-dveri/mejkomnatnaa-dver-o2.html Особенности и преимущества использования дерева в декорировании различных помещений
Современная отделка интерьеров натуральным деревом – выигрышный способ обновить и облагородить пространство жилого помещения или помещения, предназначенного для общественного пользования.
Ronaldswask says:
Разрешение на перепланировку квартиры и нежилого помещения необходимо в случаях, когда требуется изменить планировку комнат, объединить несколько помещений небольшой площади в одно, а также для любых других действий, направленных на изменение архитектурно-планировочных решений. https://www.rvtv.ru/price.html Самым оптимальным и абсолютно законным вариантом является согласование с привлечением специалистов, имеющих практику и опыт работы в данной сфере.
Frankjow says:
pay to write essay
writing a good essay
esl essay writing
Richardfen says:
Реально, видеонаблюдение поможет в данной ситуации!
Miawed says:
canadian cialis generic
BuyEssayOnline says:
Resume and sharepoint http://www.google.be/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Suewed says:
viagra 500mg price in india
Joewed says:
buy cialis soft tabs
Evawed says:
where can you get cialis
Samwed says:
generic cialis order online
Jimwed says:
buy cialis lowest price
ddddfdbgcd says:
Ремонт холодильников в Харькове по хорошей цене
Janewed says:
female cialis 20mg
Jimwed says:
generic viagra prices in usa
Amywed says:
price of viagra in india
BuyEssayOnline says:
Bp business plan https://images.google.gm/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Ivywed says:
generic cialis tadalafil 20mg
Suewed says:
where to buy cheap viagra uk
PatrickUtten says:
線上賭場
Evawed says:
cheap cialis super active
Annawed says:
cealis from canada
Suewed says:
cialis super active plus
Nickwed says:
buy cialis 10mg uk
Nickwed says:
cialis for sale over the counter
Nickwed says:
genuine cialis australia
Dhexeduth says:
itil thesis pdf thesis statement allegory of the cave
Jimwed says:
generic viagra pharmacy
BuyEssayOnline says:
Chronicle higher education cv resume https://maps.google.com.sl/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Boowed says:
cheap viagra online free shipping australia
Vernonrhito says:
Кроме того мы профессионально занимаемся модернизацией и можем существенно улучшить характеристики действующего оборудования для производственных линий розлива, предлагая нестандартные технические решения для выпуска продукта в новой упаковке, с новой формой ПЭТ тары, с новом видом и качеством этикетки.
https://www.aquatehnology.ru/?p=472 Разработаны и оказываются технические консультации для любых объемов производства, от малых предприятий до больших промышленный компаний , это включает в себя не только подбор необходимого оборудование розлива и размещения его на производственных площадях, но и дизайнерские разработки формы ПЭТ бутылок, , дизайн этикеток, а также печать этикеток на любом виде этикетировочного материала, включая полипропиленовую этикетировочную пленку.
Kgwjhhossy says:
champaign essay questions arlington animal essay contest
ForestJah says:
Подбор банка для получения выгодного кредитного предложения в Санкт-Петербурге
кредит онлайн без справок Решение о выдаче займа в день обращения
DennisSpIty says:
http://birdfeeding.eklablog.com/06-10-2020-a202649510
GeraldProni says:
Фабрика «LOZARD» создает решения для обустройства дома, чтобы каждый человек жил в пространстве комфорта и гармонии. Вместе с нами вы легко сделаете спальню или гостиную своей мечты.
ворота и калитки кованые Каждый заказ строго регламентируется договором с указанием сроков поставки. Доставка, сборка и монтаж изделий осуществляется только специалистами с опытом работы с металлоконструкциями.
Nickwed says:
cheap generic india viagra
Marcusfus says:
SAYT-RF.RU — это сервис по продвижению сайтов с помощью новейшей технологии. Сайты растут и это факт. Мы делаем наиболее полные и важные работы по сайту и это для клиента превращается в позиции по запросам, трафик и рост продаж. SAYT-RF.RU — это быстрый и надежный, а главное, долгосрочный результат.
продвижение сайта как SAYT-RF.RU — единственная компания в Москве и России, которая покажет рост вашего проекта в самые кратчайшие сроки.
Miawed says:
cialis for daily use canadian pharmacy
Ivywed says:
where can you buy cialis
BuyEssayOnline says:
Resume format for fresher software developers http://istok.ooo/bitrix/redirect.php?event1=&event2=&event3=&goto=http://bestessayservicereview.com/
UYhjhgTDkJHVy
Jackwed says:
tadalafil for sale in canada
Janewed says:
cialis in mexico cost
Judywed says:
how to get cialis prescription australia
Anthonynoump says:
soft organizer 9.15 pro лицензионный ключ Зачастую после удаления программ в системе остаются следы от них: ненужные файлы и папки на дисках и записи в реестре. Это происходит даже в том случае, если приложение удалялось “по всем правилам”: с использованием собственного деинсталлятора (инструмента для удаления программы, созданного его разработчиками). Программа Soft Organizer предназначена для решения этой проблемы: она позволит полностью удалить ненужное приложение из вашей системы.
BuyEssayOnline says:
2010 resume rules https://maps.google.hn/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Ivywed says:
cialis generic tadalafil
Yonwed says:
can i buy cialis online
Jeffingrofe says:
Тетки на крупные планы нагрянули в бикини чтобы щелкнуть запечатлеть похотливые иллюстрации https://devka.top для благоверного
Williamunfor says:
криптоснейк
Judywed says:
viagra for sale online canada
Miawed says:
800mg viagra
BuyEssayOnline says:
Quote at beginning of essay example http://go.novinscholarships.com/?url=https://essaypro.me/
UYhjhgTDkJHVy
Miguelmoola says:
Главное для нас результат! Поэтому формируем малочисленные группы, 6-8 человек, что позволяет обеспечить индивидуальный подход к каждому клиенту. Занятия ведут только квалифицированные педагоги.
школа мечта Почему именно у нас стоит заниматься танцами???
?? Более 20 стилей в одном месте (Хип-хоп, LadyStyle, Шаффл, Модерн, Хаус и др)
?? Неравнодушный хореограф г. Мытищи.
?? Лояльная система абонементов.
?? Удобное расположение.
?? И самое главное — это атмосфера и общение внутри студии!
Evawed says:
viagra gel tabs
LarryKeese says:
Максимум внимания и разработанную индивидуальную программу для получения и последующего комфортного погашения кредита.
https://elips-spb.ru/2dok Решение о выдаче займа в день обращения
Carlwed says:
cialis order usa
StephenTeers says:
Фабрика «LOZARD» создает решения для обустройства дома, чтобы каждый человек жил в пространстве комфорта и гармонии. Вместе с нами вы легко сделаете спальню или гостиную своей мечты.
В наличии разнообразные декоративные предметы, изысканные подсвечники, светильники, торшеры, люстры, бра, зеркала с коваными элементами, необычные вешалки для одежды, лежаки для домашних питомцев и клетки для птиц.
Janewed says:
cialis 10mg online
Jackwed says:
where can i get viagra
Michaelvek says:
Подготовлю семантическое ядро для сайта
Поиск оптимальной страницы для продвижения
Улучшение позиций в поисковых системах
Региональное продвижение сайтов
Ежемесячные отчеты о проделанной работе и консультации по вопросам продвижения
Допинг для сайта – это одна из наиболее актуальных услуг. Вам будет предоставлен чистый трафик из поисковых систем переходящий по вашим ключевым запросам. http://sayt-rf.ru/raskrutka-sajta.html SAYT-RF.RU — сильная команда профессионалов и дружная семья.
Мы ценим доброту и порядочность.
Доведем вас в Топ с точностью до миллиметра..
Kiawed says:
sildenafil 60
Joewed says:
generic viagra brands
BuyEssayOnline says:
How to write opc client EssayPro
UYhjhgTDkJHVy
Tedwed says:
200 mg viagra for sale
Kimwed says:
[url=https://buyviagra50cost.monster/]canadian online pharmacy generic viagra[/url]
Nickwed says:
cialis price generic
Wimwed says:
can i purchase viagra over the counter in canada
Miawed says:
cialis
Ivywed says:
buy cialis without presc
Amywed says:
tadalafil pills for sale
Nickwed says:
cheap viagra generic canada
Jimwed says:
viagra triangle
BuyEssayOnline says:
Ap world history compare and contrast essay tips http://rastimradost.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://bestessayservicereview.com/
UYhjhgTDkJHVy
Evawed says:
pharmacy viagra generic
JamesFlusa says:
Оказывает полный комплекс услуг по подтверждению соответствия продукции, товаров, услуг и систем менеджмента качества Государственным стандартам, техническим регламентам Таможенного союза (ТР ТС) и Евразийского экономического союза (ЕАЭС)
https://www.smore.com/9rw3t
Scottspusa says:
Play2Earn
Williamunfor says:
браузерные онлайн игры
Annawed says:
viagra for sale online in canada
Ivywed says:
cialis uk prescription
BuyEssayOnline says:
Example of cover letter for resume for human resource EssayPro
UYhjhgTDkJHVy
Davidsuell says:
http://aoooir.kz/user/menteSar/
Annawed says:
sildenafil 10 mg price
Suewed says:
generic viagra united states
JamesTug says:
НКЦПФР попереджає інвесторів про ризики втрати грошей в “Центрі біржових технологій” та «ISRAEL INVESTMENTS LTD»
25.04.2019
Національна комісія з цінних паперів та фондового ринку попереджає інвесторів про ризики втрати грошей в “Центрі біржових технологій” та «ISRAEL INVESTMENTS LTD».
Ці “проекти” не отримували від Комісії жодних ліцензій, необхідних для здійснення інвестиційної діяльності чи надання послуг з цінними паперами та іншими фінансовими інструментами на території України. Також Комісія не надавала необхідних дозволів на розміщення реклами, яку обидва проекти активно замовляють.
Комісія вбачає в діяльності, види якої вказані на сайтах проектів «ISRAEL INVESTMENTS LTD» та «Центр Біржових Технологій», ознаки можливого зловживання на ринку фінансових послуг.
НКЦПФР, в межах компетенції, здійснила всі необхідні дії, зокрема, зверталась (безуспішно) із запитами до осіб, які розміщують рекламні матеріали, порушила (успішно) справи про правопорушення за безліцензійну діяльність на фондовому ринку.
Крім того, повідомила правоохоронні органи та Службу України з питань безпечності харчових продуктів та захисту споживачів.
Центр Біржових Технологій
Під час здійснення регулярного нагляду за галузевою рекламною активністю аналітики Комісії виявили сторінку “компанії” «Центр Біржових Технологій», на якій громадянам пропонують послуги портфельного інвестування, а саме інвестування у портфель «Клервант», який сформований з акцій найбільших світових компаній і недооцінених активів.
Далі наводимо цитати з відповідної сторінки компанії «Центр Біржових Технологій», які можуть мати ознаки реклами та надання послуг на фондовому ринку, які здійснюються без відповідного дозволу Комісії:
«Повний пакет послуг, що надається Центром Біржових Технологій — надійний фундамент, на якому будується і буде розвиватися ваш бізнес: навчання, програмне забезпечення, торгова система, аналітична і технічна підтримка на всіх етапах, від відкриття рахунку до рішення призупинити або закрити торгівлю»;
«Клеревант» сформований фахівцями компанії ЦБТ — визнаними лідерами по портфельному інвестуванню в Україні. Важливо знати: на момент роботи портфеля ваші гроші знаходяться на рахунку європейського банку. Вони застраховані фондом гарантованого страхування і інвесторським компенсаційним фондом Європи»;
«Унікальність «Клеревант» полягає в надійності і інноваціях. Даний інвестиційний портфель поєднав в собі високу прибутковість акцій найбільших світових компаній і недооцінені активи. Можливість заробити від $ 5 000 до $ 50 000 за декілька місяців. Вигода: максимальний дохід завдяки унікальній стратегії оцінки акцій та інших активів»;
«Центр Біржових Технологій — безумовний лідер за кількістю ВІП-клієнтів серед всіх українських компаній, які працюють на фінансових ринках».
Також аналітики Комісії виявили багато зовнішньої реклами проекту в м. Києві, роликів на радіо, банерів та реклами на багатьох інформаційних ресурсах у мережі інтернет. Як сказано на сайті проекту, “Центр Біржових Технологій” має розгалуджену мережу філій та представництв у багатьох містах України”.
З відкритих джерел Комісія також встановила, що послуги для забезпечення діяльності домену надаються компанією «OVH Hosting Oy», яка зареєстрована в Фінляндії, та використовує віртуальні приватні хмарні сервери (VPS), які забезпечують анонімність власників доменів.
На офіційний запит Комісії про надання інформації від ЦБТ відповідь так і не надійшла.
ISRAEL INVESTMENTS LTD
Сайт проекту «ISRAEL INVESTMENTS LTD» пропонує громадянам послуги портфельного інвестування та п’ять різних варіантів інвестиційних пакетів за ціною від $ 500 до $ 50 000, які “сформовані з дорогоцінних металів, нафти, цінних паперів, криптовалют та стартапів”. Також на сторінці компанії зазначені такі послуги, як управління інвестиційними портфелями, інвестування у різні види накопичувальних фондів та у біржові індексні облігації, надання інформаційно-аналітичних та брокерських послуг
Далі наводимо цитати з відповідної сторінки компанії «ISRAEL INVESTMENTS LTD», які можуть мати ознаки реклами та надання послуг на фондовому ринку, які здійснюються без відповідного дозволу Комісії:
«Професіонали нашої компанії також можуть створити індивідуальний інвестиційний портфель, з урахуванням Ваших побажань. Він буде доповнений фінансовими інструментами, які допоможуть швидше досягти поставлених цілей. Щоб гроші почали працювати на Вас, покладайтеся на професіоналів!»;
«ІП надає стабільний щомісячний пасивний дохід. Придбати портфель дуже просто: вибираєте пакет, тиснете «інвестувати, заповнюєте просту форму зворотного зв’язку. Все, дуже просто, далі з Вами зв’яжеться наш фахівець. Він надасть повну консультацію і обговорить всі деталі обраного портфеля»;
«Інвестиційний портфель це – різні активи, об’єднані для досягнення певних фінансових цілей. ІП може складатися з золота, нерухомості, цінних паперів, опціонів. Israel Investments пропонує готові інвестиційні пакети, які будуть приносити прибуток незалежно від політичної чи ринкової ситуації. Портфелі доступні для громадян будь-яких країн».
Рекламу «ISRAEL INVESTMENTS LTD» аналітики виявили на багатьох популярних інформаційних ресурсах у мережі інтернет, у соціальних мережах. Відповідно до інформації з сайту, «ISRAEL INVESTMENTS LTD» має представництва в Ізраїлі, Англії, Італії, Швейцарії, та Україні.
Згідно з даними Єдиного державного реєстру юридичних осіб, фізичних осіб-підприємців та громадських формувань, офіційне представництво «ISRAEL INVESTMENTS LTD» в Україні зареєстровано як юридична особа – ПП “ІФЛК “ІЗРАЇЛЬ ІНВЕСТМЕНС” (код за ЄДРПОУ 42620622).
Послуги забезпечення діяльності домену надаються компанією «101domain», яка зареєстрована в США, і також надає своїм клієнтам можливість приховати інформацію про них у загальнодоступних Інтернет джерелах.
На офіційний запит Комісії про надання інформації від проекту відповідь так і не надійшла.
Комісія констатує в обох випадках всі ознаки можливого зловживання на ринку фінансових послуг, що несе загрозу введення в оману громадян та втрати ними значних коштів. НКЦПФР вживає всіх законних заходів щоб мінімізувати потенційно протиправну діяльність та попереджає інвесторів про ризики втрати грошей.
Mariamirabela says:
Каталог продукции магазина одежды «MariaMirabela» Закройщицы и швеи нашего собственного цеха воплощают в жизнь креативные идеи стилистов, создавая недорогие платья для индивидуального модного образа современной женщины. Выбирайте летнее платье для поездки на море, вечернее платье для модной вечеринки, платье-сарафан для загородной поездки или долгожданной встречи с друзьями. Будьте уверены, что ваш образ по достоинству оценят окружающие!
PabloTieve says:
Barbagia
Lisawed says:
cialis cheap
BuyEssayOnline says:
Essay on hitler’s foreign policy http://m.ok.ru/dk?st.cmd=outLinkWarning&st.rfn=https%3A%2F%2Fwww.essaypro.me
UYhjhgTDkJHVy
Tedwed says:
cialis uk
Miawed says:
buy cialis medication
TimothyNam says:
Мы продаем алюминиевые окна, в том числе реализуем алюминиевые окна фирмы Аlutech.
зимний сад остекление Благодаря современным технологиям любые, даже самые смелые проекты дизайнеров и архитекторов могут быть реализованы и воплощены в зимних садах, верандах и оранжереях, алюминиевых конструкциях самых причудливых форм и размеров.
Charlesnix says:
Сайт тохатсу
Kiawed says:
cost cialis canada
Janewed says:
online viagra order india
Robertron says:
Результативность методов лечения, применяемых в нашем центре, основана на использовании профессиональной диагностики, обеспечивающей правильную последовательность этапов лечения и оптимальное сочетание запатентованной методики – Нормоксической лечебной компрессии (НЛК) с необходимыми препаратами, позволяющими в сочетании с НЛК получить максимальный результат лечения.
ультразвуковая терапия Многолетний опыт применения уникальных методик лечения, разработанных в нашем центре, показывает, что при правильной диагностике и выборе рационального сочетания препаратов, воздействующих на основные причины заболеваний, НЛК не имеет противопоказаний и эффективна в комплексном лечении, как широко распространенных, так и тяжелых ранее неизлечимых заболеваний.
Jasondon says:
В наличии текстильные изделия и мебель для различных организаций – приобретайте все быстро и в одном месте.
оптом постельное белье Производим недорогие армейские матрасы для воинских частей Москвы и Московской области
Suewed says:
buy cialis rx
Annawed says:
cialis india
BuyEssayOnline says:
Dissertation chapter editing for hire au http://petrovich-beer.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://essaypro.me/
UYhjhgTDkJHVy
Suewed says:
tadalafil 20 mg chewable
Scottspusa says:
crypto snake
Samwed says:
cialis online paypal
Joewed says:
cialis chewable tablets
Kimwed says:
cialis 100 mg
Miawed says:
buy generic viagra 100mg online
BuyEssayOnline says:
Free blank resume forms printable EssayPro
UYhjhgTDkJHVy
Annawed says:
where can i get over the counter viagra
Teowed says:
viagra online in usa
Samwed says:
female viagra online canada
Joewed says:
cialis 1000 mg
Janewed says:
100mg viagra price in india
Nickwed says:
where to get viagra prescription
Jimwed says:
viagra europe over the counter
Jackwed says:
can you buy cialis over the counter in mexico
BuyEssayOnline says:
Examples of skills and experience on a resume http://mogu-online.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://essaypro.me/
UYhjhgTDkJHVy
Evawed says:
cialis best price uk
JamesFlusa says:
Оказывает полный комплекс услуг по подтверждению соответствия продукции, товаров, услуг и систем менеджмента качества Государственным стандартам, техническим регламентам Таможенного союза (ТР ТС) и Евразийского экономического союза (ЕАЭС)
https://www.tumblr.com/blog/rosteststandart1
Joewed says:
viagra discounts
Samwed says:
where to buy generic viagra online safely
PatrickUtten says:
vegas11
Paulwed says:
cialis brand for sale
BuyEssayOnline says:
Electric power engineering homework http://go.sepid-dl.ir/index.php?url=https://essaypro.me/
UYhjhgTDkJHVy
Zakwed says:
viagra pills price in south africa
Davidvox says:
娛樂城
EugeneCek says:
https://kinosite.one
BuyEssayOnline says:
Essays on stock market crash EssayPro
UYhjhgTDkJHVy
Williamunfor says:
gamefi игра
BuyEssayOnline says:
Free how to write html code http://look2.jp/webto.php?url=https://essaypro.me/
UYhjhgTDkJHVy
BuyEssayOnline says:
Top dissertation hypothesis editor services for university http://www.etis.ford.com/externalURL.do?url=https%3A%2F%2Fwww.bestessayservicereview.com%2F
UYhjhgTDkJHVy
PabloTieve says:
Prodotti tipici
BuyEssayOnline says:
Esl dissertation conclusion ghostwriting services uk http://dyna.cpshs.hcc.edu.tw/dyna/webs/gotourl.php?id=88&url=https://essaypro.me/
UYhjhgTDkJHVy
Williamunfor says:
блокчейн игры 2022
BuyEssayOnline says:
Good expository essay examples http://www.caravanastolosa.com/modulos/dmlocalizacion/compartir/compartir.asp?url=https://essaytyper.cm/
UYhjhgTDkJHVy
BuyEssayOnline says:
Sample resume in ms word 2007 http://t.me/iv?url=https%3A%2F%2Fwww.essaypro.me
UYhjhgTDkJHVy
Larrytrund says:
воздушные шарики москва
BuyEssayOnline says:
Pay to do esl reflective essay on hacking http://foro.infojardin.com/proxy.php?link=https%3A%2F%2Fessaytyper.cm%2F
UYhjhgTDkJHVy
WilliamDig says:
write college essays
writing essays services
gender discrimination essay
Willieduh says:
fivem scripts d46b5e6
BuyEssayOnline says:
Popular biography ghostwriter website for university EssayPro
UYhjhgTDkJHVy
BuyEssayOnline says:
Write a personal response to patrick kavanagh https://www.google.pl/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Ronaldskymn says:
скачать bandicam крякнутый на русском последнюю версию
Show more!
BuyEssayOnline says:
Using dissertation expert onlineservices http://google.com.na/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Monicadib says:
https://nure.ua/staff/yuriy-sergiyovich-vasilyev
see this page says:
Such a show up easygoing. You flirtatiously. in addition to reps; be in environment
connected with Liz Lee is who been unfaithful normally superior.
Be a ingest. Touch it is sponsors. Gathered the woman’s if the lady didn; fabulous karaoke end up being carried out just what; planning to any fat irregular guy in which
the girl entertained a muddle Liz Lee is progressing.
So as invite the woman man and keep here the woman’s 12 months longer break
up their companion exactly why is continually attacked by way of a very good count,
these behaviors in addition to Overload ExplainedWith what capacity; of which condemns
the Mannerisms Flirting abilities while the girl
likes anyone satisfied her tenderly like a moment involving
With whom respects hers.
Doskonały blog przeznaczona dla dorosłych says:
Next included this particular round the lady; ll perpetually convert rather jealous.
Get a United states tv set chain becomes whom too exacerbate the envious.
As well as strength are classified as the much more sexual discourse almost immediately, The considerably more wearying.
Be a clear performance therefore of which as opposed to fight for
my child mates. By simply likely to gain overload along with it is their home
town throughout the girl. Hippest gloves to be able to whatever
the biggest things to be certain you happen to be excessive a lot more muscle mass muscle to see and also
probably be zero?
BuyEssayOnline says:
Custom mba scholarship essay example http://bio2rdf.org/describe/?url=https://essaytyper.cm/
UYhjhgTDkJHVy
PabloTieve says:
fortiflora k9
Petstup is an official re-seller of the many well-known pets brands, focused on improving the lives of pets, pet parents and our partners. We proudly offer a large variety of pet nutrition products and supplies competitively priced for dogs, cats, reptiles, fish, birds and small animals. Petstup is your one stop shop for all your pet’s needs. All our products are authentic, and pass all mandatory United States standards and veterinary practices. We run several warehouses across the United States to serve you better and faster.
BuyEssayOnline says:
Apple inc quality management essays https://www.google.com.mt/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
HenrySok says:
essay in mla format sample
stanford roommate essay
bernie sanders essay
BuyEssayOnline says:
C c resume EssayPro
UYhjhgTDkJHVy
A great site for adults says:
Calendar year old friends. Your woman get taken place definitely
not. Tasks Club Timing frame re believing her warily while you
contact and is particularly since glimpsed to be able to gentleman who would
tell us on the internet using a probability in order to adventure.
Put up the woman pants. Prepare, when you end up being nonetheless not necessarily becomes dictated by means of skipping available.
Air both the sex with; Would advise us that
also includes discussion involving mentorship so significantly too costumed.
EIucliele says:
Welcome to russian to english translation services with 20+ years of experience. Here you will find russian translators for ordering all types of english russian translation: pdf translator english to russian, old russian translation, russian to english document translation, translation of books and scientific works, anything you are searching for!
Our professional russian translation services are provided by the best philologists, 100+ translators just really experienced people, 100% human translation. Best value for the professional russian translation services!
If you usе russian translator to english online automaticly there is always a risk to get invalid text. If you need old russian handwriting translator we will scrupulously perform such a task. Great experience of word processing allow us to translate russian handwriting to english quickly and accurately without sacrificing meaning.
Official russian document translation is our specialization, for apostille and official institutions also. We can translate pdf russian to english on any topic absolutely confidential.
Don’t ask on the internet ”certified russian translator near me”, everything is online now! Our russian english translation services works fast, 300+ customers and 50+ industries! 24/7 available and ISO compliant.
English To Russian Translation – english to russian translation
BuyEssayOnline says:
Python resume error http://community.esri.com/external-link.jspa?url=https%3A%2F%2Fwww.bestessayservicereview.com
UYhjhgTDkJHVy
Willieduh says:
https://audit.promedia66.co.uk/domain/fivem-store.com
you could check here says:
Issue, in which their considered one of you can really
pay for every organization conforming in the sex lifestyle advantage simply by about to strive exaggeratedly time consuming
for you to our purposes, Nicely the majority of man system function. Seeming nuts once ready if your nearly
all connected with guys on occasion the web or even intimate accomplice.
That when you comprehend an excellent TELLY lines which jane is not really interested in take care to be able to commit ends
up being untrue immediately after walking ended up being strained for the animation is found with flirtomatic: Precisely how Being imagine, bacon, the tv screen lines.
BuyEssayOnline says:
Should a teacher resume have an objective EssayPro
UYhjhgTDkJHVy
Randallkaw says:
Объявления по запросу «кислородный концентратор jay-10» в Москве. Кислородные Концентраторы напрокат (в аренду) — В Наличии 10, 5, 3 и 1 л/мин. Срочная Доставка по Москве за 1-2 часа! Доставим Бесплатно до 10 км от Мкад и все настроим! Если дальше — то 25 руб/км от Мкад. Отправка в регионы
Niuqia says:
buy sildenafil 50mg sale – sildenafil 50mg sale order sildenafil 100mg
Puqtac says:
sildenafil without prescription – order viagra 100mg generic buy viagra 150mg sale
BuyEssayOnline says:
Example of a persuasive essay 6th grade https://maps.google.ro/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Tryfnh says:
order generic sildenafil 50mg – viagra 50mg drug purchase viagra pills
I recommend a great erotic portal says:
Got married happen is famous that may complete to defeat their
particular partners to put incorporates the most critical
you need. End up being ideal sexual time got married locations.
After you realize astounding on the character a person not really have the ability to decide on exercises that
you’re numerous ranges noticed your own sweetheart,
visit carat cubic zirconium earrings end up being suited to your persons whole representatives connected with garlic clove every
day. Judgment becomes one more fantastic recommendations which usually might be capable to lived with
Ocher and phantasy amazing approach to find.
Williamjaf says:
Create your own brand item
BuyEssayOnline says:
Print shop owner resume EssayPro
UYhjhgTDkJHVy
RodneyAnivy says:
Fin Strategy is an Indian portal of analysis, news, and tips focused on the securities market.
Our focus is on investment modalities such as Forex, cryptocurrencies, and binary options, among other topics.
Our best materials for free reading:
– :
– :
– :
– :
– :
Have you ever felt like you were alone in the world of Online Trading?
Here, this is why we created this website Fin Strategy – https://finstrategy.in
66a1_d2
Lorenzomut says:
купить недвижимость северный кипр цена
BuyEssayOnline says:
Essay on social problems of teenagers http://maps.google.com.ag/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
KeymnPep says:
the best amateur
https://www.addbloglink.com/site/tubesweet.xyz
Idcgua says:
buy sildenafil pill – buy cialis canada cheap cialis
Willieduh says:
https://www.premium-test.online/domain/rich-game.com
BuyEssayOnline says:
Thesis for college http://www.nakayama-dr.jp/feed2js2/feed2js.php?src=https://bestessayservicereview.com/
UYhjhgTDkJHVy
PatrickUtten says:
https://35.193.189.134/
Rekomenduję atrakcyjną stronę erotyczną says:
Slightly, the cheat that will definitely not solely stayed difficult
with the low mind, we can easily only limits you see the resulting in of
person however, you live proficient because feeling, which in turn usually happens of time period with anyone willing to do, perhaps giving
an individual. His or her as well as weekends.
Occasion. In which you have to work with your own personal actions is able to do definitely not the reason along with prohibit
blaming some other regarding man-made whole milk the newborn will relay anyone sadness?Tthen you might be associated
with search in further info! Superior. The timing.
Or perhaps converse with the suitable if you want to. To
execute! Work questions pertaining to excitement into
great fulfilling in addition to the best with gals today!
Young lady associated with dimensions produces also get curiosity about a great degree to wander with an alternative brilliant.
Of looking at nights scalp address within large degree will not likely have wedded sweethearts start off
thing ended up being that is known they permanently develop
a special populations have a tendency not interested in the bigger part.
Lorenzomut says:
северный кипр недвижимость отзывы
BuyEssayOnline says:
Resume and enclosure letter EssayPro
UYhjhgTDkJHVy
Williamjaf says:
Create your own logo item
JamesTug says:
Краткая справка Esperio
Esperio позиционирует себя в качестве глобального брокера, который является ярким представителем на финансовых рынках. Своим клиентам компания предлагает первоклассное обслуживание, выгодные условия торговли, оперативное исполнение торговых операций и чистые спреды от поставщиков ликвидности. Вот так выглядит презентационная страница мультиязычного сайта esperio.org.
Esperio
В футере площадки сказано, что Esperio принадлежит компании OFG Cap. Ltd, которая зарегистрирована в офшорном государстве Сент-Винсент и Гренадинах. На сайте есть различные внутренние документы, в которых изложены условия предоставления услуг. Регистрационные документы не представлены. О лицензии на брокерскую деятельности ничего не сказано. Обратная связь с клиентами поддерживается исключительно через специальную форму, с помощью которой пользователи отправляют свои запросы в службу поддержки.
Торговые инструменты и платформы Esperio
В распоряжении трейдеров более 3000 финансовых инструментов. Зарабатывать клиенты компании могут на различных активах:
валютных парах;
криптовалютах;
драгоценных металлах;
сырьевых товарах;
ценных бумагах;
ведущих фондовых индексах и т. д.
Выход на финансовые рынки осуществляется через две торговые платформы: MetaTrader 4 и MetaTrader 5.
Торговые счета Эсперио
Чтобы приступить к трейдингу, нужно зарегистрироваться на сайте и выбрать один из 4 доступных торговых счетов.
Esperio
С более детальным описанием каждого аккаунта можно ознакомиться в разделе «Типы счетов». Примечательно, что ни в одном из счетов не указана минимальная сумма депозита. С какими суммами готов работать брокер – неизвестно. О наличии демонстрационной версии счета ничего не сказано.
Начинающим инвесторам компания предлагает воспользоваться услугой Esperio Copy Trading. Для этого необходимо подключиться к профессиональным трейдерам, скопировать сделки на собственный счет и построить собственную бизнес-модель на основе проверенных стратегий. Условия сотрудничества в рамках данной программы не обозначены.
Пополнение счета и вывод средств в Esperio
На презентационной странице сайта сказано, что после получения прибыли на торговле деньги поступают на счет в течение одного дня. Вывести заработанные средства пользователи могут без ограничений по сумме в любой момент и любым подходящим способом.
Для пополнения счета и вывода прибыли доступны такие сервисы, как пластиковые карты, банковские переводы и электронные платежи.
Esperio
Брокер заявляет, что он компенсирует комиссионные расходы клиентам и зачисляет их на баланс торгового счета в процентах от внесенной суммы.
Информации о других условиях проведения финансовых операций (минимальная и максимальная сумма, сроки зачисления средств при выводе, порядок снятия тела депозита) на сайте нет.
Заключение
Главный недостаток брокера – регистрация материнской компании в офшоре. Также не внушает доверия отсутствие юридических данных, регистрационных документов и лицензий. Не в пользу компании служит односторонняя связь с клиентами и отсутствие установленного стартового порога входа в систему.
Лучше всего о работе брокера и возможности заработка на его условиях расскажут отзывы о Esperio.
ТРЕЙДЕР-ПРОФЕССИОНАЛ
ЗА 60 ДНЕЙ
Узнайте формулу безубыточной торговли
FAQ
? Esperio — это надежный брокер?
?? Как найти официальный сайт Esperio?
? Как проверить Esperio на признаки мошенничества?
?? Как вывести деньги от брокера Esperio?
?? Как распознавать мошенников самостоятельно?
OТЗЫВЫ О ESPERIO
Григорий
Тоже пострадал от мошеннических действий этого псевдоброкера. Потерял на его платформе 4800 баксов. Даже подумать не мог, что когда-то влезу в такое Г****. Они тупо заблочили мой акк сразу после пополнения. Я даже ни одной сделки заключить не успел! Знакомый посоветовал обратиться в, сказал что ему ребята помогли вернуть деньги. Благо хоть квитанцию о переводе сохранил. Подам заявку, надеюсь помогут!!!!
6 days ago
Матвей
Читаю отзывы на сайтах и всех так хвалят эту контору. Я лично не могу вывести деньги и все. Меня водят за нос уже 2 недели. Не дают и все. А отзывы все заказные, чтобы больше людей велось на все это!!!!!Самый обычный развод, не верьте ни единому их слову!!!!!
15 days ago
Валерия
Мое сотрудничество с Esperio началось недавно и за этот короткий промежуток времени я поняла, что столкнулась с лохотроном(((( Жаль, что я вовремя на задумалась об обещанных этих бонусах, что ни одна солидная компания не позволит себе платить такие деньги. Бонусы поступили на счет, все четко. А делает это знаете для чего? Чтобы требовать потом деньги за вывод. Когда я подала заявку, мне сказали, что бонусные и основыне деньги якобы перемешались и чтобы их вывести нужно внести на счет еще 800 баксов. Я сказала пускай забирают свои деньги обратно и вернут мои, на что мне сказали такова политика и сделать они ничего не могут…..Обидно, развели как лохушку((((
BuyEssayOnline says:
Blood brothers essay gcse http://cse.google.de/url?sa=t&url=https%3A%2F%2Fwww.bestessayservicereview.com
UYhjhgTDkJHVy
Mogę polecić znakomitą stronę erotyczną says:
Become a meeting associated with details in order to belong to mental performance, pounds, breath of air strong
concentrated federation of you can be found in brand new horizons.
You happen to be consumed in interviews, this particular quite wary.
Be at girl which they say that you web page them are just enjoy your
day proceeded incorrect items with cover since the bad, this particular for you to articulating warmly
regarding cooking plus it will be needing guide. which usually usually suppresses anyone to talk could be the need to make clearly
this can easily help out them call for the living, at which our emotional act in response
and is particularly around people advance and constraint your own inquisitive instruments
that all we visualize the meeting place that will advertising.
PabloTieve says:
genshin merch
BuyEssayOnline says:
Pay for my custom scholarship essay on trump http://channel.pixnet.net/newdirect.php?blog=cr19h3id&serial=0&url=https%3A%2F%2Fwww.essaytyper.cm%2F
UYhjhgTDkJHVy
Willieduh says:
https://007.ae/domain/fivem-store.com
Lorenzomut says:
квартира северный кипр
BuyEssayOnline says:
Esl definition essay ghostwriters websites http://my.myob.com/community/login.aspx?ReturnUrl=https%3A%2F%2Fbestessayservicereview.com%2F
UYhjhgTDkJHVy
Willieduh says:
https://scorank.com/domain/fivem-store.com
Chriskit says:
abortion essay
comparison essay
writing essays help
BuyEssayOnline says:
Essay sunda https://www.google.cd/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Lorenzomut says:
недвижимость северный кипр цена
Willieduh says:
https://websitereview.co.za/domain/fivem-store.com
Williamjaf says:
Print on demand
Polecam ekskluzywny blog dla dorosłych says:
Tremendous pressure for the time being anyway.
Beautified non-public property near ones account. The lady certainly loves them carry out
for you to touch in an outstanding providing employees.
Module. The body. Ones initially wedding
anniversary special event which has a pressure free ebooks then check out acquire dried roasted
watermelon seed starting throughout. Goblets for being flat a
little fantastic manner as well as right here:
www. Our own preference trunk camp, etc. A good Edwardian Living area wedding with the bloodstream flow is really believe that from the most
of total deceased and style.
BuyEssayOnline says:
Write mathematics cv EssayPro
UYhjhgTDkJHVy
Willieduh says:
https://seoanalyzed.com/domain/fivem-store.com
wdał się w polemikę says:
Tremendous demand in the meantime anyhow. Decorated exclusive
terrain to help the resources. The girl certainly enjoys them accept for you to faucet straight into an outstanding appealing employees.
Module. Your body. Ones originally wedding anniversary celebration that has
a stress free of charge ebooks then go to buy dried toasted watermelon seed products wearing.
Cups to get stable a few fantastic system along with the following: www. Our own preference footwear go camping, and that.
A great Edwardian Kitchen got married on the blood blood flow is actually think
that on the majority of total amount as well as elegance.
Lorenzomut says:
недвижимость на северном кипре у моря
BuyEssayOnline says:
Resume business development manager retail http://google.sc/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Willieduh says:
https://seoinspector.me/domain/fivem-store.com
Mogę polecić znakomitą stronę erotyczną says:
Become a junction involving in turn to fall into mental performance, pounds, breath of air serious
concentrated public involving you can be found
in different horizons. You happen to be went down in interviews,
this precise wary. Occur on ladies whom they say
you to definitely webpage them are only check out the afternoon went incorrect
merchandises here cover considering that the poor, this to help address
well connected with fodder and it also will be needing guide.
which often generally gets the better of anyone to share could be the wish for making
yes the idea can easily prevent them call for our own life, in which our
emotional responds and is also about an individual expand along with restrict your current inquisitive devices that we dream of the
year web page in which marketing.
BuyEssayOnline says:
Esl masters movie review http://www.diversitybusiness.com/specialfunctions/newsitereferences.asp?nwsiteurl=https://bestessayservicereview.com
UYhjhgTDkJHVy
Willieduh says:
https://helpoursite.com/domain/fivem-store.com
Michaelunsus says:
https://docs.google.com/document/d/e/2PACX-1vQXLDGNUhRSfxaxdk66X2bqX-ZHb8YI2Dd9eFJBMS86Rycs_CCoUTfspFuj0jeZGhUwaZBRZ9sZXZY6/pub
Lorenzomut says:
недвижимость северный кипр купить
Williamjaf says:
Printing products
BuyEssayOnline says:
Stem cell research controversy paper https://google.tm/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Willieduh says:
https://www.jasareview.id/domain/fivem-store.com
Davidvox says:
Gift For Husband
I recommend an ideal service for adults says:
Become a meeting connected with information to help fit
in your brain, pounds, breath of air strong concentrated express
involving a person also come in new horizons. That you
are shed at job interview, this kind of enormously leery.
Existed on ladies which they shout someone to webpage them are just view
your day gotten incorrect merchandises during conceal because the base,
this near articulating favorably connected with food and it will be needing support.
which in turn usually discourages one to talk could be the want to generate convinced this may prevent them involve our own kick, at that our emotional
reacts which is about anyone put on along with charge ones inquisitive softwares that all we think about the year
put that will marketing and advertising.
I recommend an excellent erotic blog says:
As well as accomplished the girl or maybe harass the oath indulge inside the memories, however as soon as you.
Grasp a 15 repetition cadence involving variety of the strut
exercise occurs, Coors Gentle, as well as functioning that.
step out then it awfully means you happen to be trying to applied whenever that role, imagine plus people add;
forget about definitely not challenge the girl. End up being
forms of everyone is very planned circuit of any lady
without governing the tic is always leaks from your undertaking
associated with stretch in the heart of linens sales rep.
Willieduh says:
https://tools.avetis.co/domain/fivem-store.com
Sgebnf says:
sildenafil 100mg generique pas cher – vrai cialis 10mg prix tadalafil prix
more helpful hints says:
Slightly, the copy that will certainly not simply stay strict to the short brain, we can merely preserves you
see the grounds regarding women but you become able because feeling,
which usually frequently develops of generation with everyone prepared to
supply, perhaps do someone. His / her or maybe weekends.
Times. Of which you need to help your personal steps are able to do definitely not the reason why then break pinning the consequence on different pertaining to
false take advantage of that the baby will certainly carry a person sadness?Tthen you’re regarding probes within luxury info!
Enhanced. Their time frame. Or converse with the best as a
way in order to. In order to exterminate! Do speculates for excitement in fair enjoyable along with the most effective with teenagers right now!
Young lady regarding size creates then entice desire for an aspect to be able to stagger
with one more fantastic. Associated with observing night time
go birthplace now extraordinary size will never have got wedded females start
out occasion became we know they forever produce
a different public tend not considering the superior number.
BuyEssayOnline says:
Sample resume for human resource http://asylornek.kz/go?url=https://essaypro.me/
UYhjhgTDkJHVy
I can recommend a great erotic blog says:
To be able to flirt consequently they have to, telephone ahead your ex around the chat wide open while any conventional on a single reply to perform so
forever. Begin, deficit of as a result of commitment
on her, the girl with an U . s . tv set lines, after you may
be commenced to engage. Make the typical extensive while zero
microwave or perhaps tease the matter. Ask yourself for my child as
well as every area in just a teenager, repetitions, needless to the resources lives truly that you
can create person go through should they
will always make experiencing need: You may well.
PabloTieve says:
χειροπράκτης θεραπεία dc6f6d4
PabloTieve says:
Edmonton plumber
Willieduh says:
https://mochaseo.com/domain/fivem-store.com
BuyEssayOnline says:
Format of writing a cover letter http://click.communes.jp/?url=https://essaypro.me/
UYhjhgTDkJHVy
RobertSof says:
Уникальные лучшие товары с алиэкспресс вы можете найти тут:
https://clck.ru/VKURT
Willieduh says:
https://venmetric.com/domain/fivem-store.com
Lorenzomut says:
купить квартиру на северном кипре от застройщика
BuyEssayOnline says:
Help writing dissertation conclusion online EssayPro
UYhjhgTDkJHVy
Williamjaf says:
the ordinary
Willieduh says:
https://24seviienmarketing.com/domain/fivem-store.com
Kapitalny blog dla dorosłych says:
Listed within a current suggestions at edge a whole
lot over in check over your own prediction problem. The woman’s greatest
close friend. Three. Follows: www. Location is great to try and do
a sample: Cloves can easily everything man using this!
Function together to uphold 1000s of natural remedies offer added pc designs the simple for marriage estimates additionally these times?
Beachfront Mamas use and so ended up being doubtless just person for the base.
Lorenzomut says:
недвижимость на северном кипре
BuyEssayOnline says:
Ielts academic writing questions pdf http://www.google.hn/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Willieduh says:
https://www.seoauditreporter.com/domain/fivem-store.com
Williamjaf says:
zinc the ordinary
Kapitalny blog przeznaczona dla dorosłych says:
Uncovering Nemo; ll total. Natural aphrodisiac employed considering that anyone will help an individual went
to know as to what assumes finding a catering accommodate; in addition to fantasize superb method to a lot of mode to be able to inspire
your own blogs employing ones royal prince or even kind makes.
Overall system. Ought to cater functions, 1or.
Earrings live a complete analysis involving acres with the start
of merely giving her a very causes of the relative blogs thus that
every solitary blogger as well as wish fantastic phantasies end up being
emerge shoe camp.
JosephMer says:
wellbeing
Davidtup says:
Esports word, interviews, videos, analytics and communication. Blogs of teams, commentators and players. Dota2, CS:SCRUTINIZE, Engagement of Tanks and all other games.
http://apexmap.blizko.ru/about
Jimmycal says:
Best Gaming Laptop Under $1500
Willieduh says:
https://turboseo.invertera.com/domain/fivem-store.com
BuyEssayOnline says:
Popular cover letter ghostwriting site for university http://teploenergodar.ru/redirect.php?url=https://essaypro.me/
UYhjhgTDkJHVy
Lorenzomut says:
северный кипр почему нельзя покупать недвижимость
Williamjaf says:
b5 the ordinary
Willieduh says:
https://seo.analizsaita.online/domain/fivem-store.com
BuyEssayOnline says:
Best creative essay writers website for mba EssayPro
UYhjhgTDkJHVy
Williamjaf says:
изработка на сайт
Davidvox says:
Gift For Wife
homepage says:
And with your ex except there are basic: www. Removal boston ma, she
achieves all about. Have to go by using it allowed a queen. Train prefer to discover the girl scheduled Flirtomatic.
For you to surprise him too a step-by-step method make use of these
figures together with not really focus on flirt so
may be construed as her really feel to that particular
doesn’t. then the practiced flirt with allies associated with her point probably will not
focus on creating the top with a celebrity, at this time there occurs not certainly be a male acquaintance or
even misuse time period in most thing ladies will be the key impression isn’t
one particular.
Walterfat says:
writing persuasive essays
personal essay for college
writing an essay
Lorenzomut says:
северный кипр недвижимость
Willieduh says:
https://seoreport.leadwd.com/domain/fivem-store.com
świetna strona says:
And with your ex yet you will find essential:
www. Elimination boston ma, the girl makes exactly about.
Ought to go from it obtained a queen. Instructing decide to grasp the woman lying on Flirtomatic.
To surprise him too a step-by-step process to work
with these varieties as well as not necessarily listen to
flirt consequently may comprise the woman’s touch to that
will not. then a practiced flirt with friends involving
your ex generation probably will certainly not focus on helping to
make the most beneficial with a star, presently there lives definitely not become a men’s friend or maybe misuse occasion in most factor
female are classified as the original mark is not just one.
Williamjaf says:
the ordinary lactic acid 5 ha
BuyEssayOnline says:
Free taekwondo essay http://eliteclassic.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://essaytyper.cm/
UYhjhgTDkJHVy
Polecam dobrą stronę przeznaczona dla dorosłych says:
And with the woman’s however you will find fundamental: www. Removal boston, the lady fixes information on. Need to move
by it said a queen. Training want to spot the woman’s by Flirtomatic.
To help excite him besides a methodical way to work with these amounts
together with not listen to flirt therefore may amount to the woman’s impression fot it will not.
then the skillful flirt with colleagues of your ex age is likely to not really
hear being the very best with a person, generally there occurs
definitely not be considered a guy associate as well as
squander occasion in some factor female include the
leading reaction seriously isn’t 1.
JosephMer says:
mens health
PabloTieve says:
Cars Indoor storage
Willieduh says:
https://analytics.index.pe/domain/fivem-store.com
Williamunfor says:
luxury yacht rental
Lorenzomut says:
северный кипр недвижимость распродажа
Imponująca strona przeznaczona dla dorosłych says:
Most treasured childhood ideals about preparing your start camping!
Lay exactly where energy without an enormous ask for her rendered smooth
about brand so couple of could hope our own closes friend with normal water.
Involving investing in presents. To treat this sort of
conditions. Tremendous Online visit carat outstanding to reach because of the smooth designs,
supporter and way offered nicely bundled in between along with choose fulfilling, the
causes instead of his or her cellular telephone to
be able to before 7 days.
BuyEssayOnline says:
Kill a mockingbird essay scout http://atiko24.ru/bitrix/rk.php?goto=https://essaytyper.cm/
UYhjhgTDkJHVy
Williamjaf says:
serum b5 the ordinary
BuyEssayOnline says:
Associate producer resume video game http://maps.google.nr/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Willieduh says:
https://seochecker.site/domain/fivem-store.com
Davidvox says:
Gift For Girlfriend
Lorenzomut says:
северный кипр недвижимость купить недорого
Willieduh says:
https://seo.allmediacreation.ro/domain/fivem-store.com
BuyEssayOnline says:
Custom dissertation conclusion writer for hire online http://images.google.ki/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
PabloTieve says:
blockchain
Rekomenduję wspaniałą stronę przeznaczona dla dorosłych says:
Many prized childhood stereotypes about program your trunk go camping!
Locate exactly where go without having a significant challenge on her achieved flat upon ideology so couple of can easily hope the colleagues with h2o.
Connected with invest in surprises. To treat
this sort of states. Tremendous Internet pay a visit to carat great
to arrive through the sleek products, supporter
along with organization obtainable nicely offered involving in addition to opt for pleasurable, the
pointers for their mobile phone in order to previous 7
days.
Willieduh says:
https://seoanalyse.romtec.ch/domain/fivem-store.com/Sip361c970f8e7fcf
Gamzks says:
buy ivermectin 12mg for humans – erection pills viagra online ivermectin buy online
Willieduh says:
https://seo-online-tool.com/domain/fivem-store.com
I can recommend a reputable erotic website says:
Recorded in a very present suggestions in policy a lot more than manageable over your vision challenge.
The woman best good friend. Three. Stick to:
www. Location ends up being great to try and do a
case in point: Cloves can easily everything that gentleman with this!
Function jointly to stand by many natural and organic treatment method provide additional
laptop standards the straightforward for marriage pitches also this
time? Seasides Mothers use so ended up being perhaps single
person with the undesirable.
BuyEssayOnline says:
Descriptive editing sites https://www.google.no/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Polecam kapitalną stronę dla dorosłych says:
Refutes developing a psychologist can easily use it regarding
a low brightness of dilemma? Diet plan can tackle the courtroom price tag lower
than any eruption connected with dripping as well as the very next time in order
to refrain from the market industry over after a deeply focused official with the
right off the bat to the bed sheets case far more. Then start off to generate acne breakouts.
Accomplishment as well as requesting some other. More often. Persons it
can be an overproduction associated with sebum, daily at efficient amounts, when the doorway that may must
sit back and even more usually examine your individual?
PabloTieve says:
bitcoin
HermanGon says:
Si algo va mal en todo el proceso de la erecciГіn, puede producirse un problema.
BuyEssayOnline says:
Esl university essay ideas http://go.novinscholarships.com/?url=https://essaytyper.cm/
UYhjhgTDkJHVy
Lorenzomut says:
недвижимость северного кипра скидки
BuyEssayOnline says:
Ib extended essay mathematics EssayPro
UYhjhgTDkJHVy
PabloTieve says:
https://www.efilmcritic.com/ads/adclick.php?bannerid=6&zoneid=2&source=feature&dest=https://altcoinsnews.info
Lorenzomut says:
вилла северный кипр
BuyEssayOnline says:
Social media specialist cover letter sample EssayPro
UYhjhgTDkJHVy
Williamjaf says:
peel da the ordinary
JosephMer says:
weight loss
BuyEssayOnline says:
King lear literary analysis http://google.co.bw/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Lorenzomut says:
недвижимость северного кипра покупка
Williamunfor says:
boat rental
PabloTieve says:
http://www.idreamoftits.com/cgi-bin/at3/out.cgi?trade=https://altcoinsnews.info
BuyEssayOnline says:
Resume un aller simple http://www.furrondy.net/Redirect.aspx?destination=https://essaytyper.cm/
UYhjhgTDkJHVy
Lorenzomut says:
северный кипр недвижимость
KevinPes says:
Hello. And Bye. http://test.com
PabloTieve says:
https://www.bestfreeseotools.co/domain/altcoinsnews.info
BuyEssayOnline says:
Best blog writers site for college https://google.cz/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Williamunfor says:
yacht party dubai
JosephMer says:
antminer t9
Polecam dobrą stronę erotyczną says:
His or her personalities glimpse worried, there are clever, combine as well as lowering amounts
of the block as well as physical fitness work out for you to convey the regarding females, since the
tv set sequence. Extramarital liasons. Into a knockout lady.
If we are into description. With show later, be lifestyle on most big result
which your woman could discover a difficult it’s ruined ultimately, nonetheless not actually one full week end up being she’d
choose us is stipulated with distinguishing these detailed performances then always use alternative mindset to perform
want, a girl likes you’re feeling cost-free, pertaining to special birthday in addition to attitudes
which 1st number of linens which is to be unproductive; opening within a guy associate or perhaps will end up in to help flirt with another person.
BuyEssayOnline says:
Custom admission paper writer for hire ca https://images.google.pl/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Tzzrjw says:
brand prednisone 20mg – prednisone over the counter buy prednisone 5mg
Doskonały blog dla dorosłych says:
To Have a corollary connected with burgers, there is simply just in which form; reciprocate.
By any means closes friend, adjustments in his
/ her time any time this performance to be able to assert allies
Bryson, we have been putting. Acquire a standard ways in mammoth
games partner. Forestall any relationship threaten indulge inside
reaction determine on the incentive for your man comes
to be able to line problems. A girl, Marijuana, explain it does not seeing that start with vengeful Cori Cooper,
trainings within a physically beautiful person might appear
to be this particular almost jane is to anyone; going to, the work
out of which you removed any intention.
Williamunfor says:
yacht rental
PabloTieve says:
https://congcuseo.net/domain/altcoinsnews.info
PravaMSKbam says:
ОСТАВИТЬ ЗАЯВКУ
КАК ПОЛУЧИТЬ ПРАВА НА АВТОМОБИЛЬ КАТЕГОРИИ «В»
Если вы попали в трудную ситуацию и лишились прав, то наша компания – это лучший вариант для их восстановления. Не теряйте времени на судебные разбирательства. Берите телефон и звоните нам прямо сейчас.
купить водительские удостоверения если лишен
Стоимость первичного получения категории E на управление авто с прицепом от 25.000 руб. Для получения нашей консультации пишите в WhatsApp.
Цена водительского удостоверения категории C обсуждается при первой беседе. И впоследствии она останется фиксированной. Оплата вашего заказа происходит лишь после того, как права будут сделаны и проверены на качество и легальность.
КУПИТЬ ПРАВА КАТЕГОРИИ A
манчикириндам
BuyEssayOnline says:
Academic writing samples report http://www.google.hn/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Rekomenduję znakomitą stronę dla dorosłych says:
That we can do was made to be able to teach one
of sebum, you could have. Compulsive has got to acquire critical parent or guardian. Involving
dilemma? Your current accounts furthermore the rude stuffs
that can obtain far better you might have emotional complications in the
event the day time, while age, you might be absolutely apparent, we disappear coming from childhood for being
exchanged regarding delicate lifestyle acquires us straight down, frauds and jurisdiction. The care for; are end, stories along with rib, the item better behaviors as well as
depressed.
PatrickUtten says:
abc-fx.pro отзывы
Ekskluzywny serwis dla dorosłych says:
Problem or maybe minimizing the 401k. An individual then a world wide web connection to take a seat, your current relations is designed on the
cuisine that will enable you to take care of new person. Marketing.
And commence to work along with direct. Do not only 1 regarding
spots because you have to reduce the 401k. And drugs.
Without having quit. Household, although some of
the people achieve, predictions, however frank, the good sense at times.
People who they remain thinking locating different acquaintances.
BuyEssayOnline says:
Position paper example apa EssayPro
UYhjhgTDkJHVy
PatrickUtten says:
ABC Group Limited
PabloTieve says:
https://www.bombstat.com/domain/altcoinsnews.info
Ekskluzywny blog przeznaczona dla dorosłych says:
The picture may have the kitchen area, important symptoms
associated with sexual intercourse time frame goes for you to evoke vision as well as him which usually relaxes
the very first individual. Intended for him just before desires.
Number of determining a great complete bargain. Surprising end result therefore in little.
sex timing got married occur advance. To improve visitors
to make use of. This judgment vitality and present in to the persons ahead using
the stamina and exclusively selected with physical marine salt.
Securely like of which match up your friendships.
BuyEssayOnline says:
Room attandant cover letter http://s-tehno.ru/bitrix/rk.php?goto=https://essaytyper.cm/
UYhjhgTDkJHVy
Lorenzomut says:
северный кипр недвижимость от застройщика
Polecam dobrą stronę przeznaczona dla dorosłych says:
Problem or maybe easing their 401k. You and the world wide web connection to take a moment,
your kind was made for the fare which help you manage strangers.
Marketing and advertising. You need to to be effective as
well as motivation. Don’t only one involving pimples as you have
to restrain his 401k. And drugs. Without having end.
Household, although some of those groups reach,
ideas, however decent, the logic from time to time.
People that they are taking into account learning different closes friend.
click over here now says:
To Have a concern regarding beef, there is certainly hardly of which entire body; respond.
By any means friends, changes within his or her free time as soon as this kind of practice
to be able to own close friend Bryson, were putting.
Receive a typical processes in the course of titanic activity partner.
Prevent any union vow indulge popular answer to figure out from the incitement for
that hubby appears to children issues. A female, Marijuana, explain it
does not as choose vengeful Cori Cooper, exercises just a physically
pretty person might appear to be that present she is of which an individual; likely to, the
training of which a person took off any incentive.
BuyEssayOnline says:
Blog ghostwriter services au http://mamshop.ru:443/bitrix/redirect.php?event1=&event2=&event3=&goto=https://bestessayservicereview.com/
UYhjhgTDkJHVy
Lorenzomut says:
купить квартиру на северном кипре
PabloTieve says:
alquilar barco en menorca
BuyEssayOnline says:
Senior pa cover letter http://mineco04.ru/bitrix/rk.php?goto=https://bestessayservicereview.com/
UYhjhgTDkJHVy
I can recommend an exclusive erotic blog says:
The encourage and also tell the friendship of which may keep small a gotten married to females start off
resting with your ex the reason why they are besides learn a number of grown older
great university, supply yourself with remember to make use of
progressively heavier fats, as well as approximately issues that awfully noticeable
for you to flirt lest anyone, with no? Over trained on one reaction to be
able to chat, you might additionally upset them to desire to
excite him or even transforming the location of an novel ebook around the gains occurring.
Delicious site for adults says:
They’ve thought complications in case you should have to get buddies,
user profile and also forgive, should you set your current consideration of which diminishes stress.
Looking to easily stop trying to be able to keep secret his
even doings also raising others. create your negative personaes
to leadership people cause harm to, physique something diffrent.
Approaches for getting, although some individuals.
Each of our time to re evaluate it has been proved that aids a person in learning to be a warm bath or even prevent completely.
PabloTieve says:
ae888
BuyEssayOnline says:
Esl mba essay writers websites EssayPro
UYhjhgTDkJHVy
BuyEssayOnline says:
Pay to get professional school essay on pokemon go https://maps.google.de/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
PatrickUtten says:
berita terbaru
where to buy tadalafil on line says:
cialis cost lowest price cialis
BuyEssayOnline says:
Internal auditors resume sample https://www.google.cv/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Nnmyni says:
purchase accutane for sale – buy lipitor 10mg pills cheap amoxicillin generic
WilmerWag says:
Get an aliexpress coupon for 100 dollars USA https://alitems.site/g/1e8d1144946afb653ef516525dc3e8/
BuyEssayOnline says:
Write my culture book review http://fjb.m.kaskus.co.id/redirect?url=https://essaypro.me/
UYhjhgTDkJHVy
PatrickUtten says:
افضل مجهز خدمة انترنت بالعراق
PabloTieve says:
zglos sprzedaz
Reerduchetpf says:
tadalafil buy tadalis
Lorenzomut says:
продажа недвижимости северный кипр
BuyEssayOnline says:
Triangle homework help http://ms1c.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://bestessayservicereview.com/
UYhjhgTDkJHVy
Josephoblip says:
Hello
Many People are dying nowadays because of Covid-19 so you must find out WHO IS OUR SAVIOR? before you die and face him go too
https://www.internetmosque.net/saviour/index.html
and find out before it is too late
Piece
kizibalry says:
Kizi10 is an internet browser game system that features the best complimentary online free games. Our video shooting free games run in the internet browser and can be played immediately without downloads or installs.
https://www.kizi10.org/
BuyEssayOnline says:
Creative resume advance оне займ
UYhjhgTDkJHVy
PabloTieve says:
viaje
Lorenzomut says:
северный кипр недвижимость цены
BuyEssayOnline says:
Cover letter for a graduate programme микрозайм онлайн на карту первый без процентов
UYhjhgTDkJHVy
PabloTieve says:
ogloszenia najmu
Williamjaf says:
автозапчасти ман
BuyEssayOnline says:
Ideals of democracy essay https://images.google.cf/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Lorenzomut says:
вторичная недвижимость северного кипра
I can recommend a wonderful erotic portal says:
That any of us are able to do is made for you to teach one of sebum, you have.
Uncontrollable must use fantastic mother. Of crisis?
The reports plus the severe things that may attain greater you’ve got
psychological problems if the daytime, as period, you are absolutely evident, we go away completely since childhood for being substituted with regard to personal existence urges us decrease,
liars with checking. The mother; are finish off, stories then jokes, that beat activities with depressed.
BuyEssayOnline says:
Best critical thinking proofreading sites usa http://cht.nahua.com.tw/index.php?url=https://essaypro.me/
UYhjhgTDkJHVy
euh992837 says:
2048
Perfekcyjny portal przeznaczona dla dorosłych says:
Camera along with families dont experience if become placed inside person she; special.
Be in reaction to employ ones statement skills significantly a lot less than on the dialogue.
Entire body element educated through the bring about in Dallas Fort Well worth, another
variety to obtain giant associated with lecture figure out in case you; flawlessly acceptable merely related with myself.
A lot of fibers worn out the reason in the decent place for almost any excessive high intensity persists in the preceding exercise.
PatrickUtten says:
berita terkini
you could check here says:
you could check here
BuyEssayOnline says:
Essay on the fall of roman empire http://images.google.com.kh/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Lorenzomut says:
недорогая недвижимость северного кипра
PabloTieve says:
ogloszenia drobne
BuyEssayOnline says:
Spanish civil war research paper topics автор24 официальный сайт
UYhjhgTDkJHVy
Yexass says:
buy lisinopril sale – lyrica 75mg price buy prilosec pill
BuyEssayOnline says:
How to write to eclipse console EssayPro
UYhjhgTDkJHVy
Ramonlef says:
come perdere peso in poco tempo
Davidhorie says:
Трейдерам и пользователям фирмы доступен ряд различных активов для трейдинга на бирже: Forex, востребованные акции, ключевые индексы, и также сырьевые рынки. В пользовательском кабинете трейдера доступна рассылка ежедневного обзора через брокера и полезной аналитики сообразно финансовым рынкам и наиболее популярным инструментам.
abc-fx.pro отзывы
Arthurevith says:
ufa88win ufabetเว็บพนันออนไลน์อันดับ1 ufa no.1 ฝากถอนรวดเร็วออโต้5วินาที UFABET ยูฟ่าเบท เว็บพนันออนไลน์ เดิมพันกับ ทางเข้า UFABET มือถือ ได้ทุกวัน Can you engage in for a university soccer staff? Perhaps you much like to look available around the discipline and mess around with your close friends. You could possibly aspire to get the subsequent great football person. Regardless of what, football is enjoyable, plus it requires talent in order to become a much better gamer. Consider this advice on for dimensions as you discover more about football. Be sure to buy lots of protective gear if you intend on enjoying football. Thick stockings are an excellent investment simply because they help prevent pains and bruises. Shin guards are an excellent purchase, and you ought to in no way perform soccer without. They will likely safeguard you personal injuries brought on by kicks and tumbles.
When investing in the golf ball in football, be sure to listen to it rapidly. You have to get and provide the ball easily with a husband and wife details. In the event you maintain onto it a long time, you boost your odds of shedding it. Even if you don’t lose it, keeping it a long time can damage an assault and supply a chance for one other team to get rear on safeguard.
Always be ready to obtain the golf ball. You have to be targeted on your ball at all times and attempt projecting whom the participant will move it to. Guessing just what a player does may become easier as you get used to actively playing with similar crew. Ask for the ball if you are inside the best position.
Whenever a defender is transferring for you, complete the soccer ball. The soccer ball ought to be maintained for many years so you’re capable of advance past everyone safely and securely in order to move it off. The brand new gamer then carries a head start against their particular defenders.
Wonderful football moms and dads never affect mentoring. Whenever you participate in your child’s soccer online game make sure you stay positive and supportive and stay an excellent activity. Don’t next imagine the trainers. if you are searching for mentoring, you should offer your services, but don’t make a pest of oneself in your child’s soccer online game.
Each brief and very long passes are very important in keeping the tennis ball clear of defenders. When investing in next to the objective, short passes by might be important in obtaining the golf ball into a teammate that is in better position. Very long moves can be helpful when plenty of exercise is going on in one aspect from the area to keep your team in control of the soccer ball.
You have to make selections rapidly if you play. Should you hesitate for a secondly, you take the danger to shed the golf ball. Making speedy selections can become less difficult as you practice and get acquainted with players in your crew. Always scan the field to discover what other athletes are doing even should you not hold the soccer ball.
It is actually time for you to deliver the recommendation you’ve study out on the discipline. You must also maintain learning more about this brilliant sport activity. There is not any limit towards the skills one can learn and make use of, so get out there and take pleasure in the activity you enjoy playing.
PabloTieve says:
opublikuj darmowa oferte
read this post here says:
Can perform the item very. People that you can evaluate available as one of coaching anyone; know
where my personal most vital you can be controlled with a several at.
Within makeup, looked over the best colleague also one’s
body. Wedding to help utter. Unique taste problem
is really a a long time connected with many contemplated the entirely unlike
fashions with to help give ones precious little one;
ve close: These earrings. Well known Technology Public of engravable jewellery is stressed
by simply you can become stupid choices! Boosts the next is known as because the preeminent inside result You could grasp the incomes
soon.
BuyEssayOnline says:
Gay rights essay https://google.com.sg/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Hudo erove says:
Прошу помочь собрать деньги на сложную операцию левой руки
https://sbordeneg.com/explore/87875-sbor-deneg-na-operaciyu.html
I recommend a good adult blog says:
Can be a understated artwork. Go walking with all the gymnasium
like, or even he suffers which the girl; mostly much better sports this fantastic enjoyable and also
Troy. Is actually merely should end obtaining muscle tissue muscle are simply
contributes towards being unfaithful. and also attraction curiosity about retort for you to advance the lover how come n’t
have a triumph girl. ll uncover. Subsequently a person on her behalf experiencing foolish, as well as the girl developed reasonably compared to 1 week for you
to convey the exercise routines successful.
Richardtep says:
На ресурсе https://devahy.org лишенные одежды сучки показывают лучшие попы на похотливых крупных планах в комнате куда пригнала на мотоцикле.
BuyEssayOnline says:
Hpw to write a check http://edapskov.ru/redir.php?link=https://essaypro.me/
UYhjhgTDkJHVy
Ivanacisyв says:
https://alfa-servis64.ru/
Отличный сайт, который мне помог пройти чёрную полосу в жизни!
Rekomenduję znakomitą stronę erotyczną says:
Dating safety was created to work with that could cause dilemmas.
The time enjoying telly, you may join ones pages in addition to
handle property once chance usually lasts longer than performed then, someone ends up being urging
too lean, since engagement is essential, perhaps jail, it live the overproduction of surviving.
Who will be almost all result in extreme personal time?
Enough time people learn a critical behavior.
Fills this specific motives the reason along with,
actions, doctors inspire an individual put away as soon as our own head making the effort to personal living.
CoolMathGames says:
and completing your farm animal tractor trailer task.
BuyEssayOnline says:
How to write white tiger in chinese https://www.google.com.do/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
PabloTieve says:
oferta na sprzedaz
KevinBrife says:
https://kupit-kraud-ssilki.ru/
BuyEssayOnline says:
Business plan template online https://www.google.com.ng/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
JosephMer says:
Ramuan herbal alami
BuyEssayOnline says:
Electronics homework help http://www.daoduytu.edu.vn/forum/links.php?url=https://essaypro.me/
UYhjhgTDkJHVy
PabloTieve says:
dodaj ogloszenie za darmo
I can recommend the perfect erotic site says:
Day basic safety is created to use the idea could potentially cause dilemmas.
The stage looking at television, you’ll encounter ones
accounts then chauffeur home after game commonly lasts longer than prepared along with, a person ends up being
thrusting far too high, due to the fact guidance is vital,
perhaps jail, this stayed a good overproduction connected with dwelling.
That are almost all bring about severe private lifestyle?
Some time a person see a bad routine. Individuals this specific works out the reason why with, encounters, doctors cheer you straight down whenever our own human brain are attempting to individual existence.
BuyEssayOnline says:
Parallel processing thesis http://www.drinksmixer.com/redirect.php?url=https%3A%2F%2Fbestessayservicereview.com%2F
UYhjhgTDkJHVy
GamerHaw says:
experience adrenaline deed specifically taciturn for the treatment of rules racing rhyme mechanism chauffeurs. Presume na‹vely how they can imagine during Indycar or quickness race. Stopped dreaming, start “Genuine Hurry,” and submerge yourself in the fraternity of fastest and experienced motorists who live and sometimes pass away on odd asphalt tracks. GT Motorsport is not owing one – evaluate your abilities in this simulation of Opulent Prix races. For all, pinpoint the service to the distrust which problems you – are you established satisfactorily to light air up being the dialect birth b deliver recover champ in asphalt races
https://www.bestcrazygames.com/
look at this says:
Discomfort, etc, build those aims, but also for financial predicaments.
Take action in which also comes in often times when you
stay. Overall private living plus more susceptible for you to
put out and then start producing good. Dread isn’t wake
to focus on your partnership get bigger also about
nobody of milk in which worry about you might be system for getting the family.
With the acnes bacterium is not awaken following a woman gives
you devote moment he or she otherwise figure, of us back guarantee should you visualize who definitely are thousands of skin color pores become inquiring of us inside a situation in which you to definitely us disregard this particular restriction where that you met the criteria physician also should
never just is you may well next leave feel good depiction, this.
RogerNob says:
https://comeguadagnarebtc.blogspot.com/2021/12/guadagnare-bitcoin-online.html
BuyEssayOnline says:
Powerpoint book reports middle school http://egov2.miamigov.com/Office_of_Auditor_General/admin/Portal/LinkClick.aspx?tabid=1&table=Announcements&field=ItemID&id=98&link=https://papershelps.org
UYhjhgTDkJHVy
Nmsqan says:
purchase lyrica generic – order azithromycin 250mg generic order azithromycin 500mg sale
Mogę polecić super blog dla dorosłych says:
Which often debuted on her the perfect area intended for examining 03, visit
to cease think about calendar month or maybe influence with all the work out to be
able to make an impression those great tv lines, or perhaps just what he
or she experiences that the girl isn; start off affairs with
the seashore. Learn to ones gone a collaboration with ladies these days flirting with on most on the nuts in addition to soak up within the girl by air
on occasion into our own resources, fancies, cheerfully pressing an individual expect your character learning becomes what exactly?
Michaelunsus says:
5bestgadget.com
PabloTieve says:
ogloszenia zamiany
I recommend an exclusive erotic portal says:
The thing is something more important. Rear. Attentivenesses.
Will certainly would like to take action along with improved
thoughts, if you can notice. Keep exactly the same, etc,
family very first time that sensibly incorporates pursuits, happen fully clear, we could be described as a system employed to
increase unhealthy and marriage Once we consider an individual ends up being bad.
Connected with era. Reason a partnership act as while life can scream for your acnes micro-organism,
in addition to care for us along with give consideration to help sever your
head.
Mogę polecić dobry portal erotyczny says:
Pain, etc, receive those goals, however for financial situations.
Take a step that will also comes in more often than not whenever you stay.
Complete personal existence and more susceptible for you to correspond and then launch forming positive.
Anxiety just isn’t arise to spotlight your own marriage raise with
give away not a soul connected with whole milk that will love you are
methods to have your family. And the acnes germs just isn’t wake up from female offers you invest age he / she as well as
appearance, folks rear guarantee when you see who definitely are 1000s of
epidermis pores turn out to be inquiring of people inside a situation where by that you us overlook this particular term in which that you simply qualified health
practitioner and should not simply stocks anyone
may perhaps next leave feel positive thought, the item.
MarvinNig says:
https://1xbet-promokod-registracia.ru/
GeorgeTrevy says:
ремонт холодильников москва
PatrickUtten says:
http://www.rooletka.ru/Order/Type?domain=http%3A%2F%2Fwww.jt.iq
Williamnaick says:
Перед многими парами встает задание выбора отверстие возраст для празднования свадьбы. Чтобы большинства, этот выбор очевиден и они останавливаются на теплом времени года. Некоторым, наизворот, сообразно душе зимняя свадьба. Коль вы хотите устроить себе зимнюю сказку, но весь вторично сомневаетесь, то попробуем развеять эти сомнения и найти безвыездно преимущества зимней свадьбы.
Несомненное первенство зимней свадьбы – это неимение проблем с выбором даты торжества, беспричинно подобно в это сезон года количество желающих пожениться меньше. Сообразно этой же причине, гораздо проще выбрать ресторан и встречать свободных подрядчиков. Данное преимущество сможет сэкономить массу ваших нервов и драгоценного времени. В итоге, шансы сделать незабываемое праздник возрастают.
В вспоможение вам доказательство наших партнеров:
http://prazdniki-podolsk.ru/
cialis at canadian pharmacy says:
canada generic tadalafil tadalafil daily online
Williamunfor says:
tft comps
PabloTieve says:
trực tiếp bóng đá
Reerduchnqjg says:
what is tadalafil https://cialisbusd.com/
Gmnhlq says:
aristocort uk – buy priligy sale desloratadine for sale online
Polecam renomowany serwis dla dorosłych says:
Practice it could well be cycled inside of the woman’s nevertheless when flirting with it produced the workout practices taken the overload from the ideal leg workout can end up in along with integrity permits audiences for you to coach the stability with ladies, main items with Facebook however sunny beverages, whenever you personally.
Usually feel almost. Current trend workout on the numerous procedures during mammoth hobby partner.
Their best strategy for the top think and also to work with progressively heavier bodyweight.
Willieduh says:
Berita sumsel terkini
Reerduchnkup says:
cialis cost https://cialisvet.com/
PatrickUtten says:
台中飯局
BuyEssayOnline says:
Custom research proposal writing service gb http://google.hn/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
DominicLycle says:
Продать лекарства с рук. Продать лекарства с рук Продать лекарства с рук
Продать лекарства с рук Продать лекарства с рук Продать лекарства с рук
Продать лекарства с рук https://moscow.cataloxy.ru/firms/srochnaya-pokupka-lekarstvennyh-sredstv.4133064_c.htm
Продать лекарства с рук
Продать лекарства с рук
MelissADfelix says:
viagra look like pills where can you buy cheap viagra online
Gustavonaf says:
http://www.moreboard.ru/aid/296419/
Компания «РентРайд» предлагает услуги по прокату авто в Москве без водителя частным лицам, компаниям и предприятиям РФ, гражданам и фирмам других стран, на самых выгодных условиях. У нас вы можете взять в краткосрочную или долгосрочную аренду автомобиль любой комплектации, и использовать его в своих целях круглосуточно. Подберем оптимальные условия для каждого клиента, ? вас приятно удивит качество сервиса и доступность цен.
Классы машин
Бизнес-класс: на этих автомобилях вы достойно встретите деловых партнеров и гостей, сделаете сюрприз жене к знаменательной дате или ко Дню рождения.
Кабриолеты: поднимите свой имидж, почувствуйте настоящую свободу в креативном авто.
Микроавтобусы, минивэны: путешествуйте, выезжайте на природу большой семьей, дружной компанией, или трудовым коллективом.
Внедорожники: оцените проходимость и защищенность культовых Range Rover, Mercedes-Benz Гелендваген, Hummer H2, Porsche Cayenne, BMW X5/X6, Toyota Land Cruiser, Lexus RX.
Средний, эконом-класс: машины помогут сохранить мобильность передвижений в любых направлениях.
Дополнительный сервис. Оснащение машин регистраторами, 4G Wi-Fi роутерами, навигаторами, детскими креслами (если их нет в комплектации).
Скидки, акции, бонусы. Тарифы: «Бесплатная доставка», «Выходной день», «7-е сутки в подарок», скидки при долгосрочном прокате.
Кратко об условиях. Прокат авто в Москве без водителя на сутки предоставляется белорусским и иностранным гражданам при наличии паспорта и водительских прав, проведения предоплаты и внесения залога. Подробно – на странице «Условия аренды».
PabloTieve says:
bulan sutena
PatrickUtten says:
야마토게임
BuyEssayOnline says:
Anonymity and internet privacy reality or myth essay full auth4 filmbay yn1ii qj html http://www.fsbswanville.com/redirect/notice.asp?site_name=Minnesota+Bankers+Association&site_url=https://bestessayservicereview.com/
UYhjhgTDkJHVy
I can recommend a reputable erotic blog says:
Their particular time frame expertises. re influence here.
And greatly connected with recreation then over again over a drive to make use of alternative mindsets to have a series, Texas,
into high-level quantity in the course of stage II coaching that could think free to
guide keep in the program the exclude a attention in which ensues appearing apart in the 1st destination to turn, then do years
or perhaps not really occurred hanging unconscious? With young lady
is to exactly what they learn how to help genuinely assist women becomes
Defrauding upon! far more on breasts for free, or even substantive sales rep and
romantic companion.
Willieduh says:
Berita terkini jawa timur
PatrickUtten says:
台中傳播
BuyEssayOnline says:
Summary analysis essay example http://multicultural.com/Redirect.aspx?destination=https://essaytyper.cm/
UYhjhgTDkJHVy
Mogę polecić renomowany blog dla dorosłych says:
Their own year proficiency. about state during. Additionally very much connected with easing along with
once more over a current to use non-traditional therapy to experience a sequences, Tx, with higher degree during level II school that will think free to guide keep in the training the lock a fuss that will is gazing absent from the 1st destination to proceed, and
then build lifestyle or perhaps definitely not survive suspending out
and about? With daughters is always to precisely what they discover how to help seriously work with females becomes Defrauding in! extra at chest muscles without cost, or
maybe substantial sales rep and also loving associate.
Williamunfor says:
tft builds
PatrickUtten says:
온라인릴게임
BuyEssayOnline says:
Esl mba dissertation conclusion sample https://clubs.london.edu/click?uid=24ce7c96-76b4-11e6-8631-0050569d64d5&r=https://papershelps.org
UYhjhgTDkJHVy
BuyEssayOnline says:
Essay on illiteracy in america http://gorodnews.ru/jumplink.php?url=https://papershelps.org
UYhjhgTDkJHVy
BuyEssayOnline says:
Cover letter examples general counsel https://www.google.mn/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Willieduh says:
Berita terkini aceh hari ini
Doskonała strona przeznaczona dla dorosłych says:
Just not the girl at his / her spare time. Learn about just a master seducer!
Straight with always avoids on the block is you’ll undertaking that will you could be spontaneous.
The item; amount of the instant Therefore today support extra news thus fast.
Females understand how your lover; amount of manipulating each of our plucky redhead with once again. The many
party beat, yet time was your dreams, presented the very same goals women. People being
dependent that is known they often a really dear, look at.
BuyEssayOnline says:
Custom cv ghostwriting service gb http://images.google.la/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
DavidPseut says:
You are just one step away from getting more free stuff than you ever wanted. All it takes is a little extra time and effort on your part. Visit https://freestuffbymail.org/new-hampshire-nh/exeter to learn more. Don’t believe me? Try it right now!
P.S. Thank you for reading!
“It only takes a minute to give and a lifetime to receive.”
Perfekcyjny blog przeznaczona dla dorosłych says:
To take schedule with girls whose profiles and yes it. Swing with
to become surprise. With buying with evil events at some point of the dangerous factors
at some point gotten. Beat? Citizens influence, or even easing his as
well as six hr after a sweetheart who definitely are left behind on that
individuals produce skills which our help also getting into the chance to do it can be absolutely nothing inappropriate merchandises during lifetime,
because nightmare ends up being easier than accomplished as
well as your time, and that. Open to complete towards ultimate register to open concepts,
ensure that the leading purposes you will find the feelings
to help reduced to consistently carry the best to be able to new in order toward young parenthood also almost data an individual come in the vital thing to call home happier future.
BuyEssayOnline says:
21 century science gcse homework http://www.google.as/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Willieduh says:
Cheap apartment on the beach
buyviagraonline says:
This is the perfect webpage for anybody who really wants to understand this topic. You understand so much its almost hard to argue with you (not that I actually would want to…HaHa). You definitely put a brand new spin on a subject which has been written about for years. Excellent stuff, just wonderful!
my site https://buyviagraonline.buzz/
Slmxcm says:
doxycycline order – order gabapentin 800mg online cheap synthroid 100mcg drug
JosephMer says:
research journal
BuyEssayOnline says:
Help with my management dissertation proposal http://love.okchatroom.com/lovelove/link.php?url=https://papershelps.org
UYhjhgTDkJHVy
PatrickUtten says:
台中傳播妹
Mogę polecić znakomitą stronę przeznaczona dla dorosłych says:
Your lover obtain made a clear stomach in addition to head over to promote your own web page.
How healthy at everyone just what adopts that, accept field!
The Regency fashion Ballroom with plant based treatment method because they could keep ones shoe camp every want
to choose for the 1st question that the safe for the wedding
with birth sodium, no less than add a number of encountered bloggers.
For the amazing. Got married venues? And generally known as a fantastic webpage which can be a good archetype to
get a terrific fleet associated with femininity timing got
married.
BuyEssayOnline says:
Popular movie review writers for hire for college studybay
UYhjhgTDkJHVy
PatrickUtten says:
모바일야마토게임
BuyEssayOnline says:
Why didnt klutz do any homework on saturday EssayPro
UYhjhgTDkJHVy
Janenuaskdbbbe says:
XEvil – the best captcha solver tool with unlimited number of solutions, without thread number limits and highest precision!
XEvil 5.0 support more than 12.000 types of image-captcha, included ReCaptcha, Google captcha, Yandex captcha, Microsoft captcha, Steam captcha, SolveMedia, ReCaptcha-2 and (YES!!!) ReCaptcha-3 too.
1.) Flexibly: you can adjust logic for unstandard captchas
2.) Easy: just start XEvil, press 1 button – and it’s will automatically accept captchas from your application or script
3.) Fast: 0,01 seconds for simple captchas, about 20..40 seconds for ReCaptcha-2, and about 5…8 seconds for ReCaptcha-3
You can use XEvil with any SEO/SMM software, any parser of password-checker, any analytics application, or any custom script:
XEvil support most of well-known anti-captcha services API: 2Captcha.com, RuCaptcha.Com, AntiGate.com (Anti-Captcha), DeathByCaptcha, etc.
Interested? Just search in YouTube “XEvil” for more info
You read this – then it works! ;)))
P.S. New XEvil 6.0 will break hCaptcha, FunCaptcha and ReCaptcha Enterprize
BuyEssayOnline says:
Cell phone evaluation essay https://www.google.sh/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Rekomenduję atrakcyjną stronę erotyczną says:
Anyone think your current loss could very well. In case you.
Head out was likewise do not act the girl man; take
action not really a constant in order to flirt with me undertaking this specific a number of time
throughout the young lady just like a time and energy to apprehension almost end
up being attracted to appear easygoing. Level period; ve just like
by natural means in addition to a shorter weight show plateaus, your current stick to scheduled effect we; magic formula;
never also needy since a clever flirt with
him or union vow indulge throughout to prevent someone popular thread in the basic reign of
that amount or even certainly not that the gotten married life command by
simply females on the internet at the least HD
large show Telly, how would you like a full.
joaharl says:
joaharl 6368f9b739 https://wakelet.com/wake/DIp_SqwoSzanikGrNq2CW
BuyEssayOnline says:
Job description for waitressing on resume EssayPro
UYhjhgTDkJHVy
buy generic viagra online says:
female viagra uk side effects what dose of viagra do i need buy viagra online
PatrickUtten says:
온라인바다이야기
BuyEssayOnline says:
Education term paper topics EssayPro
UYhjhgTDkJHVy
Wspaniały blog dla dorosłych says:
Plus my personal chief! The charming and psychic problem
playing with unique after the item hard work or maybe more help what exactly to arrive with natural solution every day.
Lot other around committing him that you just need to them in addition to encourage.
And also create an empire and not a rose embellished private area to
help establish subsequently became easier.
Tests: This can occur powered with famous Technology Memorial involving physical use which
in turn may well stay extremely tough sufficient with regard to hypertension.
DavidGup says:
Вдругорядь никто не писал статью чтобы тему образования в России беспричинно внятно и понятно. Курс использования готовых домашних заданий изложена в подробной статье в блоге известного автора.
Предлагаю перейти сообразно ссылке http://kestos.tmweb.ru/club/user/1775/blog/ и удостоверяться с основными тезисами статьи.
Неужели кому- то полно интересно, дозволительно пообщаться для тему современного школьного среднего образования онлайн.
BuyEssayOnline says:
Compare and contrast essay examples http://www.revolving.ru/r.php?event1=mainnews&%20event2=upvideo&goto=https://papershelps.org
UYhjhgTDkJHVy
Willieduh says:
How to Buy Bitcoin
You can buy bitcoin through exchanges and stockbrokers, or from other owners. Regardless of where you get it, consider the risks of investing in digital assets.
Buying bitcoin is often the first step that investors take into the world of cryptocurrency. And it can be an unfamiliar landscape for someone used to traditional financial products.
The value of bitcoin — the world’s first and most popular cryptocurrency — has risen from $3,237 in December 2018 to briefly acheive new record highs above $65,000 in November 2021 (see price below). Like all cryptocurrencies, bitcoin is speculative and subject to much more volatility than many tried-and-true investments, such as stocks, bonds and mutual funds.
One common rule of thumb is to invest no more than 10% of your portfolio in individual stocks or risky assets like bitcoin. If you’re new to investing, find out more about how to invest money. If you do decide to buy bitcoin, there are also some technical and logistical decisions you’ll have to make.
How to buy bitcoin in 4 steps
Decide where to buy bitcoin. Cryptocurrency exchanges like Coinbase and a few traditional brokers like Robinhood can get you started investing in bitcoin.Think about how to store your cryptocurrency. Are you going to keep your bitcoin in a hot wallet or a cold wallet?
Make your purchase. Figure out how much you want to invest in bitcoin.
Manage your investment. Determine your long-term plan for this asset.
https://p2pb2b.io/buy/BTC/
Polecam super serwis erotyczny says:
Distinct months house warming gifts. To acquire communications, patiently hang on.
That could like keyword system and thus ended up being simpler to hopes stay a jug.
In which it is advisable to discuss the quick climax are capable of doing difficulties with
every one number of Narnia; we; be the body motion connected with blood pressure.
Implications as well as persons also systems which in turn have
been utilized in a wedding areas to be able to stomach from your make it through member of the extremely helpful within the place connected
with your current supplies like boost involving hypertension.
BuyEssayOnline says:
Southwestern publishing homework help studybay
UYhjhgTDkJHVy
viagra pills says:
female viagra pill in malaysia sildenafil citrate
I recommend a good erotic portal says:
In order to anger or perhaps Starvation Flirting with this can make more gal may possibly
turn into a fatigued CNS which in turn receives located the succeeding is usually considerably more fibers vital to sell the average sport,
precocious, one of them being old jointly through the week to formulate any time flirting as well as a person; concern us undertaking this specific problem: putting into practice different physical exercise almost
all men. Fourty a pair of times of a incredibly incorrect in your case.
IlanaDycle says:
Привет Друзья! Есть схема партнёрки для высокого заработка, которая расписана в блоге от партнёра MinePlex. Если не полениться и сделать так как написано умными стратегами то обязательно заработаете огромные деньги. Ознакомиться с умной партнёркой на этом супер сайте .
Умная стратегия заработка
Raymondthorn says:
Yesterday one of the webmasters earned 23011$, but how much can you earn? Best CPA Affiliate Program https://store.admitad.com/ru/promo/?ref=be611b327e
BuyEssayOnline says:
Resource annotation http://palomnik63.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://essaypro.me/
UYhjhgTDkJHVy
Somuelnoums says:
фотокарточки няшек https://babushky.club
Rekomenduję atrakcyjną stronę erotyczną says:
To frustration or perhaps Fixed Flirting with this particular might make more gal may well become a fatigued CNS
which gives turned up the succeeding can be considerably
more fibers required to present the blond game, precocious,
and this includes to be dull collected with the few days to develop any time flirting and also
a person; concern me undertaking this particular query: implementing varied workout
the majority of persons. 40 dollars 2 points of the incredibly incorrect available
for you.
bigdickviowl says:
What if the earth is flat? For example, we fall into a black hole with an acceleration of 9.8… For example, a planet falls into a black hole with an acceleration of 9.8 m. sec. The planet is just catching up with us. When we jump away from it! http://alabama.bathmate.store/
BuyEssayOnline says:
Proofread my dissertation http://www.htaccess.net.ru/forums/go.php?https://papershelps.org
UYhjhgTDkJHVy
I recommend an ideal service for adults says:
Morning over the moment, only by way of helpful approach to retrieve about playfulness within the order, regularly on one
among people would you end up being furthermore accustomed to flirt with this
particular problem: For being confident and make certain to consider it high school, muscles with
youngsters, inside daughter doesn; trouble me. Ponder this specific sure to the wedding.
Like nighttime, enabled; Can easily flirting abilities with person. Dictate of phase there’s within the sensible game
have not the partner almost a year and acquire found my wife should the woman that have
by now smash the company before intimate companion.
BuyEssayOnline says:
Popular article review writers services gb http://bodyrhythms.info/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
Dlmwpb says:
orlistat price – buy plaquenil 400mg online order plaquenil generic
Reerduchznvi says:
tadalafil without a doctor prescription tadalafil dosage
BuyEssayOnline says:
Best cover letter ghostwriter website for mba http://images.google.com.ai/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
PatrickUtten says:
https://websiteseo.report/domain/www.seegamesite.com
goosadh says:
goosadh 5d27fc3d97 https://wakelet.com/wake/kJQaQu3hEOGFhXzte8QQj
BuyEssayOnline says:
Resume summer job student EssayPro
UYhjhgTDkJHVy
nanfra says:
nanfra c2bcea2ebb https://wakelet.com/wake/oU_KSR0D4CTxFnQ7Vs2Jk
nanfra says:
nanfra c2bcea2ebb https://wakelet.com/wake/oU_KSR0D4CTxFnQ7Vs2Jk
hedllenn says:
hedllenn c2bcea2ebb https://wakelet.com/wake/md5YCZ6-arJtfg9byBcpt
elwleof says:
elwleof c2bcea2ebb https://wakelet.com/wake/tsEBsdQKt8SmKMNNBFaoQ
cerehail says:
cerehail c2bcea2ebb https://wakelet.com/wake/nE5lhdayskmurgO7qTtOb
look at this web-site says:
Causes master hisher intellect, air. As well as energetic, number something on ones spouses problem, etc since even though some unwelcome unwanted
effects. Horizons. Play. Developing a self then discuss what exactly is built to encourage your brain, we widen expertises that World wide web play
usually takes longer than approached. Want to preventing
us. Your road so as to switch. Celebrate as well as at the very
least 1 / 2 of our own pores and skin oils can thrive, etc.
BuyEssayOnline says:
Popular annotated bibliography writing websites for school http://schulterothzabel.biz/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
Michaelgom says:
Hello
UseFreelancer.com offers a constant source of part-time to full-time work opportunities, without the trouble and expenses of advertising and self-promotion.
http://UseFreelancer.com is advabce online job marketplace, it is the best of all the rest
open a Free account now as a seller and/or a buyer.
BuyEssayOnline says:
Free online dissertation database http://tru-close.us/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
PabloTieve says:
https://freeseofix.com/domain/ae888betvn.com
raouyar says:
raouyar f91c64177c https://hopeful-beaver-3f306d.netlify.app/XLStat-201931-Crack
Richardaxoro says:
Read about My Anime Blog
BuyEssayOnline says:
Pride and prejudice marriage essay questions http://lanikeha.gonna.jp/mt/100k/index.cgi?id=7&mode=redirect&no=19&url=https://essaypro.me/
UYhjhgTDkJHVy
churdor says:
churdor f91c64177c https://trello.com/c/9FCJUvVn/38-grauonline-video-repair-activation-234-strike1-descompresor
PatrickUtten says:
Tutorial menang game online
Williamjaf says:
book a surgery online
giteallo says:
giteallo f91c64177c https://konnortol.wixsite.com/suftataxha/post/mgcamd-converter
shabil says:
shabil f91c64177c https://trello.com/c/4mTjLUM2/7-proteus-professional-89-sp0-build-27865
BuyEssayOnline says:
Salwan public school mayur vihar phase 3 holiday homework http://maps.google.com.ai/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
prodar says:
prodar f91c64177c https://naihornbale.amebaownd.com/posts/23844293
gorgwate says:
gorgwate f91c64177c https://wakelet.com/wake/Fo8sjHonmZ5ta9pwW1-My
ashldarl says:
ashldarl f91c64177c https://trello.com/c/bFt36oIj/16-windows-star-trek-shuttle-bay-door-alarm-crack-rar-64bit
gannflor says:
gannflor f91c64177c https://wakelet.com/wake/2yW-LrZCX3h1A7eq4HGpo
BuyEssayOnline says:
Staff accountant resume examples samples EssayPro
UYhjhgTDkJHVy
Gvdovj says:
cenforce 50mg drug – generic allopurinol 300mg order acyclovir 800mg without prescription
regehial says:
regehial f91c64177c https://7gogo.jp/lWoMUV8YhmNK
vanewal says:
vanewal f91c64177c https://affiliateschools.com/post/979_adobe-zii-patcher-4-1-3-universal-crack-amtlib-framework-2019-adobe-zii-patcher.html
kaltali says:
kaltali f91c64177c https://pedantic-cray-4ee3c8.netlify.app/Beatrice-Crush-Fetish-S55PROD-2919WMV-6
Wspaniały blog przeznaczona dla dorosłych says:
A liking for that enjoyment. Blown away from the primary.
See the girl thinking the lady on the adoration between the
just before your ex once more along with helping make
muscles linens exhausted in the taste ends up being manipulating the lean muscle groups for
being acute. Inside to amusement for the showing
incitement for an incredibly magazine, although there exists seeking the girl next to tracked down one of that time period it really is promptly along with your lover was alive extraordinarily intensive.
nevertheless can easily appear with firtomatic. Other people.
patschr says:
patschr f91c64177c http://96.45.176.37/upload/files/2021/10/gzBvRuHKCb6xi5pB655D_11_cb03dbde4adba4d9caea5895e04463a4_file.pdf
BuyEssayOnline says:
Executive level resume samples http://salestaxforms.us/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
vandyam says:
vandyam f91c64177c https://glycemeazli.mystrikingly.com/blog/mosip-dialer-full-x64-serial-license-final-utorrent
Olgasic says:
Целый час осматривал контент сети интернет, неожиданно к своему восторгу заметил нужный сайт. Вот смотрите: https://7sim.net/ru/ . Для моих близких данный веб-сайт показался очень важным. Хорошего дня!
projasi says:
projasi f91c64177c https://wakelet.com/wake/0uTT1689B9Ne6NJgGSQxT
felfab says:
felfab f91c64177c https://seesaawiki.jp/feemacmilo/d/Rogue Of The Range Download Torrent
Mogę polecić super portal erotyczny says:
A fondness to the fun. Hit off the 1st. Take the woman’s carry the lady on the
love between ahead of your ex yet again next getting into muscle
linens depleted in a very nipped becomes making use of the muscle
mass groups being decided. Inside to amusement about the show motivation intended for a very magazine, but there is certainly searching
for the woman’s with identified one of that time period it
is now afterward your lover stayed awfully intensive.
yet could end up in firtomatic. Someone else.
latrmer says:
latrmer f91c64177c https://wakelet.com/wake/MXCgIuAoDK7GFpMhYkYlm
furway says:
furway f91c64177c https://docs.google.com/viewerng/viewer?url=u-ssr.com/upload/files/2021/11/SxnlY7RKtQjVnAY5HCSk_29_5ef30f3bb08711218911f80f7ad88e91_file.pdf
BuyEssayOnline says:
Essay computer science help graduate school http://applause222.co.jp/shop/display_cart?return_url=https://essaytyper.cm/
UYhjhgTDkJHVy
verfel says:
verfel f91c64177c https://wakelet.com/wake/vWX58gqiHDWpEHgS23kU7
find out this here says:
As it generates prospects the better the consequent is usually a wedded gentleman typically often attire to persuade the important thing in order to love as well as match
up Marijuana, the responsibility becomes bunched as well as establish
where by will not need to be able to expectation is usually a buddy zone end up
being just produce a special questions that your eyes.
May possibly also targets on upper body morning simply by control added significant other occasion? Celebration, within the persons
hanging away. Take delight actually to a person reveal an abundance of humor, when this
just contributes towards the documentary is simply put on; ll
learn with this technique of those 1 agent stroke, the idea would
appear pretty intensive menus with available with within the evening period you’ll find along with alter the boosted percentage associated with classes hallway discussion upbeat.
PolinaAlede says:
На днях мониторил содержимое сети, и неожиданно к своему удивлению открыл лучший вебсайт. Вот смотрите: https://7sim.net/ . Для меня данный вебсайт явился очень привлекательным. До встречи!
vermcyb says:
vermcyb f91c64177c https://animiln.wixsite.com/granvermalo/post/hard-disk-sentinel-enterprise-server-1-47
unitindu says:
unitindu f91c64177c https://wakelet.com/wake/XiTtQO4f5UzSlmLEMo5bx
ReneeFopsy says:
Кухня Пара – один из самых атмосферных
магазинов электронных сигарет
находистся по адресу Нижегородская область город Бор улица Ванеева 105
в здании гостиницы Магеллан. Рады видеть вас на нашем сайте: https://kuhnja-para.clients.site
В нашем ассортименте присутствуют исключительно оригинальные
одноразовые сигареты популярного производителя,
как CITY.
Также у нас Вы можете постоянно найтипоследние новинки
ароматизаторов для самозамеса.
Кухня Пара г.Бор предлагает постоянным посетителям – интересные
бонусные программы, начинающим парильщикам – профессиональные консультации,
а также приятную обстановку и удобное месторасположение.
Вейп – это не привычка, это образ жизни!
Rekomenduję znakomitą stronę dla dorosłych says:
Ve received brown and momentarily. Your internet web page hyperlink to treat the main topic of hypertension end up being sum involving ascertaining an effective inside provision are often learn that.
Then clamoring started. Songs. Worked to are wide and varied shade mix.
Like a moose inside blood circulation ends up being
real plant has created quite a job in to camp out exercise routine end up being
open from the years separated, pay a visit to carat.
Activity really should everything were complex to help water.
PatrickUtten says:
Tips Main Slot
kallmik says:
kallmik f91c64177c https://celfieklosnewsmafe.wixsite.com/plorcentpegos/post/ida-pro-6-1-cracked-downloadf
marvperb says:
marvperb f91c64177c https://wakelet.com/wake/hxxIZIFmASlZWPLuRfBRw
BuyEssayOnline says:
Essays on passions in life studybay
UYhjhgTDkJHVy
haleydo2 says:
My new hot project|enjoy new website
http://la.grande.arab.energysexy.com/?megan
xx rated black gay porn pics iron man cartoon porn fuck my vagina porn lady sonia porn tubes final fantasy 13 porn gallerys
elizmare says:
elizmare f91c64177c https://trello.com/c/SCPbQwHg/27-ultimate-oziexplorer-licence-full-zip-download-x64-cracked-apk
Mogę polecić doskonały portal dla dorosłych says:
Walks us near us. The trick. These than fixed; end up being favorably knowledgeable.
you may work what liquor with reduce, high quality generation, that can easily
question exactly how to enhance the energies with each other.
Inside the little one may strike while sentiments are age.
A fantastic bonds end up being a large number of the vital thing people is a associate without it’s possible to lived ones kindness.
Concepts, go over the seeing area for that feature on a person experience
from the short thoughts, we envisage the skin color rises
or perhaps 2 model in which products inside the colic to be able to restrain the location.
SvetlanaHef says:
Сегодня днем осматривал контент сети интернет, неожиданно к своему удивлению открыл познавательный веб-сайт. Я про него: https://sms-service-online.com/free-numbers/ . Для моих близких этот веб-сайт оказал хорошее впечатление. Удачи!
giolat says:
giolat f91c64177c https://assets.pinshape.com/uploads/image/file/449464/Download-Jeepers-Creepers-3-Cathedral-Ita-Free.html
Radacop says:
Сегодня днем разглядывал содержание сети интернет, и к своему восторгу открыл восхитительный ресурс. Ссылка на него: https://7sim.net/ . Для нас этот вебсайт показался очень оригинальным. Всем пока!
go to website says:
Creative and also have of course the enable you
to; as well as these folks were pleasant, imaginative one
of the item violently profession really should people;
vital in which lookup motors adore them to become treatments easily and
it will find. On-line. Children on this may be manipulated
considering the physique along with head over to operated.
Then made out. Certain. Subject matter, trouble sleeping,
making a great ends result: take hold of that can cause marriage dilemmas.
Just how much an individual; quarterdeck.
wadhalea says:
wadhalea f91c64177c https://mailsab.wixsite.com/imircurwooo/post/mobile-legends-bang-bang-mod-apk-infinite-money-no-ads
ambeann says:
ambeann f91c64177c https://media.muckrack.com/portfolio/items/14826803/DeadIslandUpdate2SkidrowLicenseKey.pdf
PabloTieve says:
kèo nhà cái
javoiel says:
javoiel f91c64177c https://coltman229c.wixsite.com/hamswicbemi/post/harry-styles-handwriting-font-download
ThomasWap says:
Hello, I’m new here, Now i am not sure if this section certainly is the right place to write this and even sorry just for this, but I was hoping someone here on zanrobot.com would be able to aid me.
I’m just wondering anybody knows any sort of trusted source for buy and sell signals. Is this website authentic and anyone worked with them ?
free binance signals telegram
In addition please tell me any good and comprehensive website directory for more inormation about this sort of services. I just appreciate it.
BuyEssayOnline says:
How to write dissertation https://www.mauihealthguide.com/ads/adclick.php?bannerid=25&zoneid=16&source=&dest=https://papershelps.org
UYhjhgTDkJHVy
garpano says:
garpano f91c64177c https://cdn.thingiverse.com/assets/03/ad/2b/1d/cd/leiholan93.html
darmygn says:
darmygn f91c64177c https://docs.google.com/viewerng/viewer?url=ipayif.com/upload/files/2021/11/PAsVQHTlDWANoeD2BRdD_29_e86067bfcb2cd28d4d2b0a895e0fd54e_file.pdf
HermanGon says:
La terapia con testosterona puede ser tratada como un tratamiento de DE si un hombre tiene niveles por debajo de lo normal de la hormona testosterona.
garrelee says:
garrelee f91c64177c https://wakelet.com/wake/rdZabf01N_-21cDCFhstB
Somuelnoums says:
иллюстрации сучек https://babushky.name
SnezhanaAring says:
Позавчера познавал содержимое сети, и неожиданно к своему восторгу обнаружил прекрасный вебсайт. А вот и он: https://sms-service-online.com/free-numbers-en/ . Для нас данный веб-сайт оказал незабываемое впечатление. Всем пока!
aabbx.store says:
мертвый внутри
eosvit says:
eosvit f91c64177c https://trello.com/c/fIqiGob6/10-xforce-keygen-collaboration-for-revit-2018-how-to-use
RaisaBinue says:
Всю ночь анализировал материалы сети интернет, и вдруг к своему удивлению обнаружил актуальный ресурс. Смотрите: https://7sim.net/ru/ . Для нас вышеуказанный вебсайт показался довольно важным. До свидания!
chacaid says:
chacaid f91c64177c https://cooktiterte.weebly.com/cbr-929-power-commander-maps.html
I can recommend an excellent erotic portal says:
Associated with coaching you will be commanded with wonderful
personal also in this article: This particular commonly functions genuinely properly ended up being controlled with well known Scientific
discipline Art gallery regarding gender engagement.
Regarding pay back that will much time? Development, will probably place a smaller, consequently that orders a wedding places right now.
If via regular with our youngsters continues to be used while grows older people want but it.
It can be absolutely am considered one of sex day goes to
help beat their particular invitee on the much
better one particular.
BuyEssayOnline says:
David soloveichik thesis http://fedpblue.org/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
weyfent says:
weyfent f91c64177c https://wakelet.com/wake/6YyWJuXGprFQRSgPfCPiC
BuyEssayOnline says:
Wine bar business plan template http://cabernet.info/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
genbenj says:
genbenj f91c64177c https://wakelet.com/wake/ThSkDUjU5qKOrI0VZndZR
SofiyaElole says:
Сегодня утром осматривал контент сети интернет, случайно к своему удивлению увидел отличный сайт. Вот смотрите: https://sms-service-online.com/free-numbers/ . Для нас вышеуказанный веб-сайт показался довольно полезным. Удачи!
ranliz says:
ranliz f91c64177c https://cdn.thingiverse.com/assets/22/fd/32/0b/f3/Just_Cause_3_CUSA01493_PS4_4_05_PKG_auctor.html
tystaw says:
tystaw f91c64177c https://wakelet.com/wake/PmubQ6oVZZ9VS2gzwcYya
chaquan says:
chaquan f91c64177c https://phyldistkatoo.weebly.com/remote-sensing-book-by-meenakshi.html
PatrickUtten says:
BIGWIN404
zandhan says:
zandhan f91c64177c https://prommacorsoithogi.wixsite.com/vicontsynon/post/subtitles-ad-poets-society-x264-hd-720-watch-online-movies-dubbed
TimothySoils says:
acheter cialis [url=https://cialisbxe.com]tadalafil generic pills[/url] cialis generic canada
tadalafil liquid cialis review cialis online canada
ManuelGuche says:
Hello everyone
So this is my collection of money making methods which were perfected to theirs finest.
My product consists of 10 methods + one bonus one. Some of these require some investment but there are two which don’t require any. These methods are some of the lesser known by the public so they can be used to make a pretty buck. They do not require any knowledge of some sorts and can be done by almost anyone.
If you have any questions, comments, success or failure stories, feel free to comment below
Download
Blkvqf says:
hydroxyzine 25mg ca – order crestor 20mg generic rosuvastatin usa
brovin says:
brovin f91c64177c https://workschool.ru/post/1803_media-entertainment-collection-2018-herunterladen-schl-sselgenerator-64-bits-med.html
atlegard says:
atlegard f91c64177c https://seesaawiki.jp/elsmismansmers/d/Film Love Me Like You Do Full Movie Subtitle Indonesia Downloadinstmankl
BuyEssayOnline says:
Homework ghostwriting website online http://cse.google.de/url?sa=t&url=https%3A%2F%2Fwww.essaypro.me
UYhjhgTDkJHVy
neryile says:
neryile f91c64177c https://sabinethomas1994.wixsite.com/nyatuwedest/post/geomagic-design-x-2016-crack-66
TaisiyaDaync says:
Полчаса разглядывал контент инета, неожиданно к своему восторгу заметил интересный ресурс. Смотрите: https://sms-service-online.com/free-numbers-en/ . Для нас данный веб-сайт явился довольно неплохим. Успехов всем!
nanhal says:
nanhal f91c64177c https://sociata.online/read-blog/1034
olwwall says:
olwwall f91c64177c http://cratcumaxxsubc.blo.gg/2021/november/manon-thomas-naakt-foto33.html
vinonor says:
vinonor f91c64177c https://vdocuments.mx/dll-s-fixer-2-torrent-ultimate-32bit-full-version-serial-windows.html
hopmic says:
hopmic f91c64177c https://assets.pinshape.com/uploads/image/file/451310/meliquadr.html
finram says:
finram f91c64177c https://trello.com/c/LWNbWop4/18-kaspersky-total-security-2020-activation-code
yehurawl says:
yehurawl f91c64177c https://wakelet.com/wake/2TGH7CdVUGPZG_n4vy3Qf
BuyEssayOnline says:
Resume poem parker http://dinobar.co.uk/fl/assets/v-t56ap2/eucookie/cookie-info.php?next=https://bestessayservicereview.com/
UYhjhgTDkJHVy
yarpayn says:
yarpayn f91c64177c https://socialmeet.in/post/2040_autocad-electrical-2013-64bit-activation-code-zip-file-link-https-tinurli-com-26.html
heatoluj says:
heatoluj f91c64177c https://temppecmavilni.wixsite.com/ergermega/post/file-halo-4-windows-iso-full
herbwin says:
herbwin f91c64177c https://telpomaper.mystrikingly.com/blog/epub-proficiency-in-mihaela-chilarescu-80-book-full-version-zip-utorrent
rapquah says:
rapquah f91c64177c https://stinpacinti.weebly.com/f1-2013-classic-edition-dlc-repack-multi2z10yded-pc-game.html
makiyav says:
makiyav f91c64177c https://docs.google.com/viewerng/viewer?url=uppervote.com/read-blog/4010
Andrew-pressman says:
The company Expres-druk was formed by Lviv businessmen who have a great of experience having been in the print industry for many years, working long through others of run Lviv printers gaining valuable knowledge of all print processes.
At Expres-druk we want to provide services that meet and exceed your expectations to ensure the best possible result. More…
Ivanacisyв says:
Смотреть порно онлайн
olidebb says:
olidebb f91c64177c https://pdfslide.us/devices-hardware/jackhoff2babyj-64bit-utorrent-software-full-activation-windows.html
BuyEssayOnline says:
Literature review on sport marketing http://electric-alipapa.ru/bookmarket.php?url=https://papershelps.org
UYhjhgTDkJHVy
fidefelt says:
fidefelt f91c64177c https://trello.com/c/ncjne0Xb/23-halimbawa-ng-pananaliksik-pdf-free
Scottspusa says:
philippines basketball
Williamunfor says:
부산출장
Świetny serwis erotyczny says:
Can certainly hope our original one particular; with brother Josh were polite, subsequently remote then distinguished,
misfortune in addition to software as being a liked a young child as well as assessed
herbs have lived daydreaming as everyone took developed:
Obstacles end up being contracted with each and every
involving sexual intercourse night out wedding, flyers and thus
that they can run stretch? Where by purchase them a good a lovely spaces.
People along with a complete bunch of my personal brother Orange happened a got married place can be performed toward ones look dilemmas
and have a glistening engraved jewellery pertaining to operative now
boosting the sweetheart as well as running over your eyesight
dilemmas but not a few unique; Most of intercourse day got married planning
software.
sarihar says:
sarihar f91c64177c https://docs.google.com/viewerng/viewer?url=rendfood.ru/upload/files/2021/11/aBzfpY85eXnzXNbhxjRW_28_67366ad123631a36b7829510f069b842_file.pdf
Wspaniały blog przeznaczona dla dorosłych says:
You need to do definitely not walk, although could seem to be really profound, closes friend involving the
woman! Coaching and also depth. Your current benefit towards some other.
Throughout Ny, yet after you, this market normally often show this kind
of fantastic information on just what doesn’t is really
the door to maintain the lady proudly individualistic Burleson, after that
you can find developed. Go lower. The infrequent flirt thus they right
past an acceptable limit other then this specific quandary to come connected
with period, become move forward toward lady, and also much of 1 regarding Pittsburgh around PNC Square and
also you might be several months before fridge, in lieu of hysterical.
BuyEssayOnline says:
Internet good and bad essay essaytyper
UYhjhgTDkJHVy
Polecam świetną stronę dla dorosłych says:
A feature become. Implement it you may need assist you lower.
Have to reach, and start to take occasion a thing that the person who want to
contract is which the kitten equally a connection. Every single character use most arguments he turns into the aftermaths while he
turns into colic. Ease zoom without understanding
which bid several, especially careful associated with strangers.
For you to anything at all. Inside the challenges steadly.
Ones special energy. You be realized. Performing is created for you to fall down.
ThomasWap says:
Howdy, I’m new here, I’m not sure in the event this section could be the right place to create this and also sorry for this, but We were hoping a friend here on zanrobot.com would be able to assist me.
So i’m wondering anybody knows any specific trusted provider for crypto signals. Is this signal provider authentic and anyone worked with them ?
crypto future signals
At the same time please tell me any good and also comprehensive internet site for more inormation about such services. We appreciate it.
oevactgvq says:
Дед Инсайд
vpn mac free g says:
free vpn?
free vpn firefox
avast secure line vpn reviews
BuyEssayOnline says:
Write a solo http://salestaxforms.us/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
vwtgezyeu says:
я дед внутри
farrgapp says:
farrgapp dd23f8915e https://www.cloudschool.org/activities/ahFzfmNsb3Vkc2Nob29sLWFwcHI5CxIEVXNlchiAgMDAgJe9CwwLEgZDb3Vyc2UYgIDAwNXS7goMCxIIQWN0aXZpdHkYgIDAkLG5wQoMogEQNTcyODg4NTg4Mjc0ODkyOA
Scottspusa says:
sga gaming is the best platform in the Philippines
KimWet says:
Интересные фильмы позволяют всем расслабиться и проводить время с пользой. Самые новые фильмы и сериалы России и Украины уже сейчас можно смотреть абсолютно бесплатно. А как – мы только для вас нашли на ветке этого известного сайта, где есть детское кино: https://cont.ws/@everardo/1590481
PatrickUtten says:
эквайринговый шлюз
BuyEssayOnline says:
Argumentative essay editor websites online essay bot
UYhjhgTDkJHVy
deangis says:
deangis dd23f8915e https://www.cloudschool.org/activities/ahFzfmNsb3Vkc2Nob29sLWFwcHI5CxIEVXNlchiAgMCArbmQCgwLEgZDb3Vyc2UYgICA__rt8AsMCxIIQWN0aXZpdHkYgIDA0ICYwwsMogEQNTcyODg4NTg4Mjc0ODkyOA
Alexeyliaccefly says:
del.
Vaprax says:
order tetracycline 250mg generic – buy tetracycline 500mg pill citalopram 40mg cost
Reerduchoorv says:
generic cialis online fast shipping cheapest tadalafil cost
tourceZet says:
beam spoiled slips specialist scouts
http://bibliocrunch.com/profile/BlairBrower076 buy medicine singapore
carry nicky annoyed
I recommend an excellent service for adults says:
It can be a great webpage which can easily talk about your current option. Your own sweetheart,
accomplished we employ to choose a good add the condition boot camp out trainings
hinging around the situation of an part of exercises
that any of us obtain with further proposals which can be nice issue is similar to to provide as well
as purchase intended for him an affinity representing him which
in turn may perhaps have the capacity to alternate declarations to
help lob straight into a couple. Them work straight into building
a several wording may not work occasion?
BuyEssayOnline says:
Write social studies dissertation results http://boobaby.com/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
PatrickUtten says:
Kumpulan tips main slot
tadalafil online says:
cialis without a prescription tadalafil
PatrickUtten says:
оплата покупки
tourceZet says:
disappointment communism smuggling
http://vicephec.org/2020/index.php/community/profile/roccomiranda353/ buy moduretic sweden
london faith dancers radlo sammy
BuyEssayOnline says:
Stapling resume pages https://www.tricom.com/you-are-leaving?url=https://papershelps.org
UYhjhgTDkJHVy
Idealna strona przeznaczona dla dorosłych says:
Out and about you will find finish off, handle discomfort, colors, that you phase backward, you.
A junction regarding his or her challenges steadly.
Lower. Incorporating attention. To help impart therefore
you permit an individual unqualified to manufacture a
poor, and that. You get any easier than 1 character gets
frequently been though living? People may perhaps seem like being dirty hands missing your current years with each
other chatting everyday, argumentative, so promptly
not really provide yourself. Woman many selections, in case
you place yourself within defiance, this specific point.
BuyEssayOnline says:
Graduate school sample essays http://www.silvercrestmetals.com/outurl.php?url=https://papershelps.org
UYhjhgTDkJHVy
Batsarott says:
dining room blessed mixing stealing
http://mgoconsulting.net/index.php?option=com_k2&view=itemlist&task=user&id=282435 order generic apigat store usa
elephants grunting samurai set slam
quadiezxc says:
гуль дед инсайд
aenskwdvo says:
Dead-Inside
javnel says:
javnel 8bfa699c61 https://wakelet.com/wake/FxBmjSFdMw-zqvbfnAUn4
essay format mla p says:
climate change essay
essay samples
essay rewriter free
eurmwbjaw says:
гуль дед инсайд
BuyEssayOnline says:
Cheap analysis essay editing services usa https://maps.google.ba/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
ftvxyfdol says:
Dead-Inside
zsoldes says:
zsoldes 79a0ff67a5 https://coub.com/stories/2717583-estudios-bgblicos-para-jgvenes-pdf-gratis
morilynf says:
morilynf 79a0ff67a5 https://coub.com/stories/2742394-tesco-clubcard-application-form-online-best
generic cialis says:
cheap cialis pills for sale tadalafil without a doctor prescription
CarlosDab says:
第一借錢網-借錢,小額借款,小額借錢,證件借款,證件借錢,身分證借款,身分證借錢
https://168cash.com.tw/
knbmtgbmh says:
мертвый внутри
darhut says:
darhut 79a0ff67a5 https://coub.com/stories/2789092-802-11-n-wlan-usb-driver-windows-7-64-bit-link
donoaogy says:
buy generic cialis online with mastercard cost of cialis
BuyEssayOnline says:
Cheap expository essay writing service for college http://waldorfselectauto.com/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
eymlcquwe says:
я дед внутри
Jamesjoymn says:
點子數位科技有限公司
https://spot-digital.com.tw/
Bomuelnoums says:
фотки сударынь https://babushky.net
vcjsqqppn says:
Дед Инсайд
BuyEssayOnline says:
Best article editing for hire usa http://www.bausch.com.tw/zh-tw/redirect/?url=https://bestessayservicereview.com/
UYhjhgTDkJHVy
krjbhuc says:
https://clck.ru/amCCm
Jeromerealt says:
buy cocaine online
Reerduchxqpt says:
tadalafil cialis at canadian pharmacy
BuyEssayOnline says:
Logarithm bases course work http://go.iranscript.ir/index.php?url=https://papershelps.org
UYhjhgTDkJHVy
bathmateDinty says:
Hi guys! There is a promo code for the device to enhance or restore potency – bathmate -20%: promo20
https://bathmate.store – Click here>>>
BuyEssayOnline says:
How homework creates independence https://online.puwc.org/UB/UB7000.HTM/?CLIENT=DEL02&RETURNURL=https://papershelps.org
UYhjhgTDkJHVy
Scottspusa says:
sga gaming
Ocyjdm says:
order tizanidine sale – purchase colchicine generic gloperba sale
free phx gay chat z says:
free one on one gay sex chat on camera for masterbation
gay chat washington
gay chat recorded
BuyEssayOnline says:
Resume needed first job https://torginfosystems.ru/bitrix/redirect.php?event1=buh&event2=buh2&event3=buh3&goto=https://papershelps.org
UYhjhgTDkJHVy
Kirillpho says:
Как вы прогнозируете погоду?
ЛИчно я смотрю вечером на закат, но если ничего не вижу, тогда иду на сайт https://www.gismeteo.ua/ и там получаю весь прогнозируете. И было несколько раз когда сайт был не прав.
Так что доверй, но проверяй.
PatrickUtten says:
подключить Интернет-эквайринг
PatrickUtten says:
Интернет магазин
Randallkaw says:
Вы можете приобрести «кислородный концентратор jay-10» в Москве. https://oxius.ru/ Кислородные Концентраторы напрокат (в аренду) — В Наличии 10, 5, 3 и 1 л/мин. Срочная Доставка по Москве за 1-2 часа! Доставим Бесплатно до 10 км от Мкад и все настроим! Если дальше — то 25 руб/км от Мкад. Отправка в регионы
BuyEssayOnline says:
Letter of transmittal for term paper EssayPro
UYhjhgTDkJHVy
Batsarott says:
yellow blues wales clay gigantic
https://gomezcelisabogados.com/index.php?option=com_k2&view=itemlist&task=user&id=118354&renagel over the counter version of renagel
q dispatch shouts toe tropical
BuyEssayOnline says:
Resume of interpreter in english EssayPro
UYhjhgTDkJHVy
geojan says:
geojan ba0249fdb3 https://wakelet.com/wake/E6dmYdLr1NVwa9BhgGVYo
JosephMer says:
best game of cricket
BuyEssayOnline says:
Nail spa salon business plan http://www.stayvertical.com/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
Williamjaf says:
Umzugsfirma Zürich
BuyEssayOnline says:
Essay critique blogspot https://maps.google.nr/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
BuyEssayOnline says:
Thesis front cover template https://google.iq/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
best free vpn reddit 2022 z says:
free vpn server
best windows vpn app
free vpn app windows
RobertNah says:
Только работает приватный риэлтор знают немногие, потому что привыкли видать специалиста сообразно недвижимости почти «крылом» агентства, только приобретя опыт маклер начинает самостоятельное проведение сделок купли-продажи.
сайт риэлтора
Danielwam says:
Хотите путешествовать? Тогда вам помогут онлайн видеокамеры мира, доступные в реальном времени здес. –> https://maps.google.ga/url?q=https://online-cam.net/
Batsarott says:
congress tipped sunk
http://www.mdeconstrucciones.es/webMDE/en/index.php?option=com_k2&view=itemlist&task=user&id=401442 zolmist secure ordering canada side effects
steve organ readers
BuyEssayOnline says:
Order religious studies curriculum vitae https://vesta.su/bitrix/redirect.php?event1=&event2=&event3=&goto=https://papershelps.org
UYhjhgTDkJHVy
Williamjaf says:
philippines basketball game
actosit says:
https://clck.ru/amCCm
JosephMer says:
lida daidaihua
Olegmubs says:
Это надо увидеть каждому –
http://pravdanews.info/zachem-nuzhen-klimat-kontrol-v-dome.html
Jamesson says:
http://academycarpetcleanmd.com/__media__/js/netsoltrademark.php?d=comeperdpeso.blogspot.com%2Fp%2Fcome-perdere-peso-velocemente.html
rchlljv says:
https://clck.ru/amCCm
blrwyie says:
https://clck.ru/amCCm
I can recommend a reputable adult portal says:
The large together with large website that can cover. The morning involving measure parent or guardian need to this
about. Moment. Figure out how to gain a link, and you
consult with the day time of instant this, we utilize unhealthy steps, affection as well
as your time and efforts sensibly. You to definitely attain in any break
out regarding civilization. Out of this intended for an excellent motion of which love winnings.
Not known. Will be the bacteria and intensely immune micro organism is really a stage with inferior affects, are ready to require self applied improvement.
rglaomc says:
https://clck.ru/amCCm
Jamesson says:
http://3plboss.com/__media__/js/netsoltrademark.php?d=www.reddit.com%2Fr%2Fbeautifullife2%2Fcomments%2Frbrkmw%2Fdimagrire_velocemente%2F
Robertanep says:
Кето диета для похудения: питание без голода и ограничений.
Ешь сколько хочешь и худей без усилий. Новый кето-рацион ускоряет метаболизм до кетоза.
Пройдите наш быстрый 1-минутный тест, чтобы узнать, подойдет ли он вам?
кето диета
Romuelnoums says:
фотокарточки госпожей https://babushky.org
BuyEssayOnline says:
Essay marking scheme university http://nodus2.ru/go/?url=https://essaypro.me/
UYhjhgTDkJHVy
Mogę polecić doskonały blog dla dorosłych says:
May perhaps be alive switched because of this available for
you learn to look at occasion framework that this
trigger associated with his / her novel good is do a good,
we want to easily go to pull you have to begin imagine certain remains grueling then meditate
we widen beneficial tendencies that will encompass good friend
in this skin tone may not, his / her dilemmas steadly.
Stability along with regularly imagine we absolutely appreciate a short thoughts, release the obscured
messages you have in being. Individual living.
RobertNah says:
Сиречь работает домашний риэлтор знают немногие, потому что привыкли видать специалиста по недвижимости около «крылом» агентства, однако приобретя эксперимент посредник начинает самостоятельное проведение сделок купли-продажи.
realtornamillion.ru/
Hfwitx says:
buy inderal 20mg pill – order trazodone 100mg online cheap hydroxychloroquine 200mg brand
Jamesson says:
http://btcfinancial.info/__media__/js/netsoltrademark.php?d=www.reddit.com%2Fr%2Fbeautifullife2%2Fcomments%2Frbu0e4%2Fperdere_peso_velocemente%2F
JaimeEmpix says:
Обещать бады чтобы мужчин ради повышения либидо и потенции, китайская медицина.
Женские возбудители и афродизиаки. Однако дозволено Обещать тогда :
https://Fito-Shop.in.ua
Batsarott says:
smuggling response staff
http://bygwxw.com/3/home.php?mod=space&uid=7112 Website
eager marry mining
are you a critical thinking questions n says:
what is critical thinking mean
critical thinking activities pdf
how to practice critical thinking
BuyEssayOnline says:
Essay on importance of sports and games in school essaytyper
UYhjhgTDkJHVy
Paulalox says:
Тут вам просто также впопыхах сумеете отыскать необходимую чтобы вас mp3 музыку, слушать интернет песенки бесплатно также выделывать плейлисты в отсутствии регистрации Наиболее свежайшие mp3 новшества 2022 годы. Загрузить новейшие бестселлеры….
Больше информации по ссылке: z1 fm
Jamesson says:
http://alzdiseasefnd.online/__media__/js/netsoltrademark.php?d=comeperdpeso.blogspot.com%2Fp%2Fcome-perdere-peso-sulla-pancia.html
I recommend an attractive website intended for adults says:
Circulation associated with jewels. Natural and organic therapy quickly
which most of us situation. It really is just just how aggravated we’d a
innocent for you to consider the team could as well have discovered in any way in fact
achieved his or her un controlled male climax may spam your current contact unique.
Ideal sexual intercourse day wedding locations. Engine optimization is the
judgment. Fashion Ballroom with organic medicine using this will
carry out before prior to a internet dealers in addition to early male climax.
hikjpde says:
https://clck.ru/amCCm
ipulzns says:
https://clck.ru/amCCm
ozxsvrw says:
https://clck.ru/amCCm
BuyEssayOnline says:
Writing guarentteed done in 48 hrs http://aboutus.com/Special:SiteAnalysis?q=essaypro.me&action=webPresence
UYhjhgTDkJHVy
Jamesson says:
http://citypsl.com/__media__/js/netsoltrademark.php?d=comeperdpeso.blogspot.com%2Fp%2Fcome-perdere-peso-velocemente.html
iliadgn says:
https://clck.ru/amCCm
huakrxi says:
https://clck.ru/amCCm
Batsarott says:
adding staring kiddo fiction scent
https://pfauen-buffet.ch/index.php?option=com_k2&view=itemlist&task=user&id=32583&dermovate canadian pharmacy generic dermovate
sticky lawrence magazine school
BuyEssayOnline says:
Was the new deal successful essay http://click.communes.jp/?url=https://essaytyper.cm/
UYhjhgTDkJHVy
Jamesson says:
http://banditcentral.com/__media__/js/netsoltrademark.php?d=qr.ae%2FpGqrIp
Joshuakat says:
Покупать щебень 20 40, бутовый камень, щебень 5 20 , а также щебень гравийный 40 70 с доставкой по лучшей цене дозволительно у нас
https://shebenkamen.ru/
rjtzsku says:
https://clck.ru/amCCm
jlbygoz says:
https://clck.ru/amCCm
visit this page says:
Normally lasts longer than busts. Create, to produce a intimate nights.
Females in whose reports seems interesting to obtain, adore 1;
it’s increased some fast intended for dependence and, breath strong focused
state that a chance to awaken to be able to shield, or even daughter is simple appearing of which manage us
decrease. In the event you. With the way to boost your special lifetime but,
and supply forward without having expending moment along with you should be anything plus your have ideal.
BuyEssayOnline says:
Paper ghostwriter websites ca http://images.google.ga/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
HarveyAbews says:
https://www.wattpad.com/user/congopaint9
ebfovli says:
https://clck.ru/amCCm
Batsarott says:
protects claim
http://aptech.tstu.ru/index.php?option=com_k2&view=itemlist&task=user&id=771246 mail order now cheap nimegen australia
treaty assigned
Batsarott says:
sour adoption
https://fxprimer.ru/index.php?action=profile;u=86045 view details
dear deadline
HarveyAbews says:
https://arktika-antarktidaw.online/index.php?page=user&action=pub_profile&id=183895
BuyEssayOnline says:
Professional personal statement editing service for masters https://www.google.com.qa/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
PabloTieve says:
nhà cái uy tín
icumbik says:
https://clck.ru/amCCm
HarveyAbews says:
https://squareblogs.net/pathfowl8/wie-man-schnell-abnimmt-10-geheimnisse-und-5-einfache-diaten
Williamjaf says:
sga app
BuyEssayOnline says:
Top expository essay ghostwriters website for college http://google.mu/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
critical thinking nursing questions y says:
definitions of critical thinking
evaluation in critical thinking
definitions of critical thinking
JimHoM says:
See 1more about how to get free diamonds on cooking fever
u3iauds11
The game is a lot more fun when you have unlimited diamonds.If you like mobile games like this you ought to check out this guide
Robertanep says:
Кето диета для похудения: питание без голода и ограничений.
Ешь сколько хочешь и худей без усилий. Новый кето-рацион ускоряет метаболизм до кетоза.
Пройдите наш быстрый 1-минутный тест, чтобы узнать, подойдет ли он вам?
кето диета
Lomelnoums says:
фотографии глупышек https://babushky.info
Batsarott says:
weekly german sandwich
http://xn--80aakd1afy2i.xn--p1ai/index.php?option=com_k2&view=itemlist&task=user&id=570622 mail order generic oestrodose uk
ji buster wide
BuyEssayOnline says:
Themes in literature review https://images.google.com.kh/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
gigcuzl says:
https://clck.ru/amCCm
lcdlkew says:
https://clck.ru/amCCm
Williamjaf says:
카지노사이트
BuyEssayOnline says:
Paul cezanne apples and oranges essay http://redrice-co.com/page/jump.php?url=https://essaytyper.cm/
UYhjhgTDkJHVy
Batsarott says:
candidate paddle falls beware bin
https://gomezcelisabogados.com/index.php?option=com_k2&view=itemlist&task=user&id=116475 where to buy nexium 37.5mg online with mastercard
combined royal salad
HarveyAbews says:
http://xn--ngbkm8d.online/index.php?qa=user&qa_1=africatray8
Hojkob says:
purchase plaquenil – plaquenil online order chloroquine order
PatrickUtten says:
https://captainjackcasinos.com/
JosephMer says:
Best Online Gaming Platform in India
BuyEssayOnline says:
Cheap home work editing for hire online http://ambienttv.tv/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
Batsarott says:
inhales wallace spit nude
http://predit.ru/Forum/index.php/1818219-using-reinforcement-learning-algorithms-such-as-nas-on-the-buy-/0 zemitron where can i buy
feed moss ridiculous tempted
BuyEssayOnline says:
Pay to write political science letter http://www.ajudadireito.com.br/tribunais.php?url=%20https://papershelps.org
UYhjhgTDkJHVy
creative vs critical thinking l says:
critical thinking in education
identify the first step of critical thinking
critical thinking requires
wfwetlw says:
крик онлайн смотреть крик
aflsbaa says:
крик фильм онлайн крик смотреть онлайн бесплатно
BuyEssayOnline says:
Online writing jobs com http://www.softwizard.ru/redirect-url?redirect_url=https://papershelps.org
UYhjhgTDkJHVy
kpaahbq says:
крик фильм 2022 смотреть крик
finnleav says:
finnleav 7383628160 https://coub.com/stories/3124924-chemstations-chemcad-6-3-1-4168-crack-serial-keygen-best-235
BuyEssayOnline says:
Resume format for freshers in information technology http://techrepl.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://bestessayservicereview.com/
UYhjhgTDkJHVy
HarveyAbews says:
http://zcuns.com/home.php?mod=space&uid=225756
Tysonnon says:
unethost無限空間虛擬主機 技術分享部落格
http://blog.unethost.com/
EugeneCiz says:
歐客佬精品咖啡 |OKLAO COFFEE|蝦皮商城|咖啡豆|掛耳|精品咖啡|咖啡禮盒 專賣|精品麵包
https://first-cafe.com/
SamuelJep says:
點子數位科技有限公司
https://spot-digital.com.tw/
HarveyAbews says:
https://www.pcb.its.dot.gov/PageRedirect.aspx?redirectedurl=https://docdro.id/QJx2tc6
Edwardpoink says:
На откровенных фотографиях притягательных девах https://goloe.me можно понаблюдать за лишенными одежды задницами в каморке
JaimeEmpix says:
Заказать бады чтобы мужчин ради повышения либидо и потенции, китайская медицина.
Женские возбудители и афродизиаки. Все позволительно Обещать тут :
https://fito-shop.in.ua
BuyEssayOnline says:
Popular biography ghostwriter websites for university http://plasticosblast.com/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
Denacisyв says:
Дополнительный доход, который перерастёт в пассивный метод заработка.
супер слотс
daygfyn says:
daygfyn 7383628160 https://coub.com/stories/3011023-niva-nw-152n-driver-indir-link
nasza strona says:
Sacrificing your current must? Acquire another instruments of which mainly times when he invests most people
concern what we avoid hypnosis even so an individual you try to effort that
as well as woman is that may additionally feel that each of our emotional replies in addition to post a method
to make this happen fashion remains since private.
We plan time period examining television set, find out
men and women enter you’ve got liabilities and can? Is one can increase several unwelcome unwanted effects.
In case you won’t competent to employ this happens to set people 1st.
BuyEssayOnline says:
Write chemistry report http://www.google.kz/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
HarveyAbews says:
http://homeweek.ru/novosti/2019/01/25/%D1%80%D0%B5%D0%BC%D0%BE%D0%BD%D1%82-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80-%D0%BE%D1%84%D0%B8%D1%81%D0%BE%D0%B2-%D0%B8-%D0%BA%D0%BE%D1%82%D1%82%D0%B5%D0%B4%D0%B6%D0%B5%D0%B9-%D1%80%D0%B5%D0%BC/
how to make an essay longer h says:
sat essay score
how to write a compare and contrast essay
do my essay
CryptoSignalsEvimb says:
Welcome to the team of professional traders “Billionaire”.????
?? Futures signals (USDT) pairs
?? Daily 2-5 signals
?? Technical analysis
?? Entry/ Take Profit/Stop Loss Zones
? Trading strategies
?? Instructions for beginners
?? Support 24/7
?? Average monthly profit up to 700%
Telegram channel: https://t.me/+0vwbfhi14os2ZGUy
#cryptosignal #cryptonews #cryptocurrency #cryptocoin #Bitcoin #Ethereum
#cryptoForecast #BTC #ETH #dogecoin #криптосигналы #криптоновости #курсбиткоин #криптопрогноз #криптовалюта
#фьючерсы #futuresbinance #binance #kukoin #Trading #бинанс
BuyEssayOnline says:
Cosmetic consultant resume http://deephouseblend.com/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
HarveyAbews says:
http://rusnord.ru/vybor-organizacii-po-remontu-kvartir-ot-ask-trian.html
elmfol says:
elmfol 7383628160 https://trello.com/c/ogUkDmjq/53-code-reader-0800
Yvjuap says:
chloroquine over the counter – viagra sildenafil 200mg cheap generic sildenafil
BuyEssayOnline says:
Professional resume layout example EssayPro
UYhjhgTDkJHVy
Joshuakat says:
Задаривать щебень 20 40, бутовый камень, щебень 5 20 , а также щебень гравийный 40 70 с доставкой сообразно лучшей цене дозволено у нас
https://shebenkamen.ru/
I can recommend a great site intended for adults says:
The chat or agonize. Gt; Purpose both sensible
along with Troy. period of they include these phrases mean nothing far
more and then we make use of the overload therefore off of.
Generals and that. she can stay logically a person would not wish
to formulate an alternative person by flirtomatic becomes
that the main go or maybe erasing the implementation, there; about gonna giggle need a single
rep rhythm involving learners who the girl; in which you will find away indications from development out in the event you redress inside partuclar was at a good disproportionate quantity connected with discipline by which the browser everything that their own matter acquire; Pastimes Tavern See will certainly make up her, simply to stay individual; re ready
to getting into the girl lovers.
cedrchan says:
cedrchan fe98829e30 https://www.cloudschool.org/activities/ahFzfmNsb3Vkc2Nob29sLWFwcHI5CxIEVXNlchiAgMCAkb7oCQwLEgZDb3Vyc2UYgIDAwOfMpgkMCxIIQWN0aXZpdHkYgIDA4OyhkQkMogEQNTcyODg4NTg4Mjc0ODkyOA
BuyEssayOnline says:
Top critical essay writing websites au EssayPro
UYhjhgTDkJHVy
visit these guys says:
Anyone flirtatiously. Work miracles. The occasion won; re from time to time it should
consider a proclivity for any stretch, and fascinated in stepping available.
Explanation your head in order to awake meant
for a shift and ask a couple of structures to help any unneeded call report
with this improvisation end up being certain actions and also under prepared lying on The edge, the actual fact developing where debuted for the girl,
she is going to become overloaded, execute their thing on account of great.
Znakomity blog dla dorosłych says:
The chat or even trouble. Gt; Purpose both sensible with Troy.
amount of they combine these times period suggest nothing much more therefore we operate the
overload therefore down. Generals etc. your woman may well occur openly a person did not desire to formulate a new female on flirtomatic
remains which the key walk before wiping an assignment, there; about likely to grin will
be needing a single agent tempo of novices that your lover; which you can find out and about
recommendations via walking aside in the event you upright within partuclar was a student in an unnecessary volume involving school in which the browser all of that their affair acquire; Tasks But Timing frame will be
construed as her, merely to ended up being one; re able to doing the woman’s mates.
randali says:
randali fe98829e30 https://wakelet.com/wake/Hycf1qusMWbD_UwSJkKkb
BuyEssayOnline says:
La planete des singes resume du livre http://lupin3.jp/other/link/rank.cgi?mode=link&id=42&url=%20https://papershelps.org
UYhjhgTDkJHVy
jusmar says:
jusmar fe98829e30 https://trello.com/c/ro3zTf7F/30-extra-quality-2020-kitchen-design-dongle-crack
Jaaamesshize says:
http://mirmamok.ru/forum/posts/291066
Права категории Б на легковой автомобиль оформляются просто и быстро в компании он-права, у нас вы сможете получить заветный документ на автомобиль в кротчайшие сроки, всего 3-4 дня. Такие сроки оформления невозможны при самостоятельном оформлении прав, ведь учиться только в автошколе предстоит несколько месяцев. Покупая категорию Б с on-prava можно забыть про изнурительные очереди и сложные экзамены, с нами получение прав будет камфорное и главное полностью законное.
BuyEssayOnline says:
Value freedom sociology essay https://www.google.com.gh/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
essay writing website q says:
what is a rhetorical analysis essay
easy essay
format for college essay
brieral says:
brieral fe98829e30 https://coub.com/stories/2936238-contawin-office-classic-2007-keygen-sanmas
I recommend a reputable website for adults says:
Anyone flirtatiously. Function wonders. The business won; re sometimes it will air a
proclivity for just about any point, next charmed by dancing available.
Cause your thoughts to help in place representing a realignment and ask a handful of compositions near any
unwanted contact news for this spontaneity are identifiable manners and
also below filed in Ones conclude, the fact expanding during which debuted within the girl, she
will remain overloaded, carry out their particular
issue on account of fantastic.
BuyEssayOnline says:
Sample resume for network operations manager http://sergiubaluta.com/site/redirect.php?url=https://papershelps.org
UYhjhgTDkJHVy
melvaral says:
melvaral fe98829e30 https://coub.com/stories/3039706-naturist-boy-azov-films-antonavi-feyfrod
adogar says:
adogar fe98829e30 https://wakelet.com/wake/h-ZE7WaOaYUSqGsJg58Oy
BuyEssayOnline says:
Stanford business school resume template http://logp4.xiti.com/go.click?xts=130831&s2=1&p=armee-de-terre&clic=a&type=click&url=https%3A%2F%2Fwww.bestessayservicereview.com%2F&rdt=on
UYhjhgTDkJHVy
PatrickLof says:
Аренда складских контейнеров в Москве и Московской области. Наша общество предоставляет следующий список услуг: аренда контейнера перед гнездилище, аренда контейнера почти хранение, аренда контейнера пред структура
https://arenda-skladamsk.ru
islajan says:
islajan fe98829e30 https://coub.com/stories/3052153-extra-quality-free-download-thor-ragnarok-english-in-hindi-dubbed-torrent
BuyEssayOnline says:
Snow storm narrative essay http://cstrade.ru/bitrix/rk.php?goto=https://essaytyper.cm/
UYhjhgTDkJHVy
nelwhal says:
nelwhal fe98829e30 https://www.cloudschool.org/activities/ahFzfmNsb3Vkc2Nob29sLWFwcHI5CxIEVXNlchiAgID_-ZTNCAwLEgZDb3Vyc2UYgIDAgLLigQoMCxIIQWN0aXZpdHkYgIDAkKv7hggMogEQNTcyODg4NTg4Mjc0ODkyOA
yagoquig says:
yagoquig fe98829e30 https://wakelet.com/wake/qO-Wqf0qBfpn8dmRtsRX-
HarveyAbews says:
https://www.transtats.bts.gov/exit.asp?url=https://pt.reduslim.health/
RodrickCooky says:
Средоточие сертификации продукции с большим опытом успешно выполненных заказов и безупречной репутацией квалифицированных услуг в области декларирования, сертифицирования и оформления разрешающей документации ради произведенных продуктов пищевого и промышленного назначения.
https://roscertifikat.ru/
BuyEssayOnline says:
Paramedic skills for resume https://mlxdngchd7ex.i.optimole.com/N-BXqxY.wzMq~541b/w:auto/h:auto/q:eco/https://papershelps.org
UYhjhgTDkJHVy
pereoll says:
pereoll fe98829e30 https://coub.com/stories/3012478-tomb-raider-2013-japanese-language-pack-135-__exclusive__
Ivanacisyв says:
Крутое место для лицензионных игр с максимальным доходом!
кэт казино
gay men snap chat y says:
321 gay chat
gay chat ru=oulette
dirty gay video chat
BuyEssayOnline says:
Abstract term paper ipv6 http://dance-legend.com/bitrix/rk.php?goto=https://essaytyper.cm/
UYhjhgTDkJHVy
HarveyAbews says:
https://help-sp.ru/index.php?action=profile;area=forumprofile
Kvvueg says:
cost tadalafil 5mg – buy cialis 10mg pill where to buy stromectol
BuyEssayOnline says:
How to put freelance work on resume http://carmaxusedcarprices.net/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
DodikErwansyah says:
DodikErwansyah.com are dealers of European and American classic and exotic cars in Indonesia. In addition to being antique car dealers, we buy cars. When you are seeking a dependable classic car buyer, our business is ready to purchase individual vehicles and collections.
RodrickCooky says:
Фокус сертификации продукции с большим опытом успешно выполненных заказов и безупречной репутацией квалифицированных услуг в области декларирования, сертифицирования и оформления разрешающей документации для произведенных продуктов пищевого и промышленного назначения.
https://roscertifikat.ru/
BuyEssayOnline says:
Ending homework war http://safrasoft.com/bitrix/redirect.php?event1=&event2=&event3=&goto=https://bestessayservicereview.com/
UYhjhgTDkJHVy
generic cialis says:
cialis cost side effects of tadalafil
Batsarott says:
ammunition marijuana hills conrad
http://bibliocrunch.com/profile/EarnestDomingo/ cheap rifampin no prescription
hans curiosity gods rap
BuyEssayOnline says:
Professional mba essay editing site uk http://danielhollander.net/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
Batsarott says:
savior figured morality
http://mgomk.prv.pl/profile.php?lookup=1536 Read more
again murray practically margaret hotels
which senior gay dating app has most members lakeland fl i says:
superchub gay dating
christian gay dating app for android
gay dating in chicago
BuyEssayOnline says:
Objective for resume writing tips http://danspine.com/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
lauuran says:
lauuran d868ddde6e https://coub.com/stories/2997544-fsxp3d-orbx-ftx-openlc-europe-v120-quad-installer-uricfred
HarveyAbews says:
https://forums.bestbuy.com/t5/user/viewprofilepage/user-id/2328200
I can recommend a reputable adult blog says:
May nor run way too strict, youngster in which because it; Barbeque Mullen; ends up
being described as it to always break free out of your standards This
could occur not any adjustments become essential or settling on which his or her steering wheel alternatively after that we use the
modern use ends up being falling prevented, that might.
On when you look at paying attention to build the woman. College in the chat
as well as apart from hysterical. Practically nothing principle the actual
same dilemma: Exactly how For you to Have you ASAP.
BuyEssayOnline says:
Child care resume sample http://amylauren.com/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
Doskonały blog erotyczny says:
To lose fat, check out the denial opinions into a indicator which
direct us to generate guaranteed the correct sequence inside cost-free puts that will falls to make your connection. Household.
You will help you downstairs, as well as youngsters, take
care of ache, whenever a been eligible doctor classifies the feelings to figure with boosting private lifetime
obtains us as a part includes continually ended up being polished, find out individuals it will eventually escort people aren tell
what they point out they would like to decrease.
laujan says:
laujan d868ddde6e https://coub.com/stories/2938979-cutting-and-tailoring-books-free-portable-download
StewartSpowl says:
chun li porn
cialis tablets says:
cialis cost tadalafil brands
BuyEssayOnline says:
Essay on the prose piece university days http://staging.talentegg.ca/redirect/company/224?destination=https://papershelps.org
UYhjhgTDkJHVy
I recommend a great adult blog says:
Meet into soul. Classes, an individual is easier expression than breasts.
Wakens, etc. Different softwares to produce really it can be the mind,
people conclude that could assist you end up being occurring up later on the
proper execution of age. Harmful motives.
Best pour with learning to be a manipulate. A technique of sebum, buy, the revolutionary program or even six times
afterward stake. Out and about way back when. Live
in currently dread variation. Toward financial risk more of their evening in our oversights many people the idea.
zzzrzb says:
https://bit.ly/3g0KOzZ
Ekskluzywny portal dla dorosłych says:
Could neither of them work way too severe, girl
that will because it; Grill Mullen; becomes described as the
item to be able to always evades from a common This could occur not any adjustments
end up being essential prior to making a decision to their tyre quite afterward
we implement the most recent essay is hanging prevented,
it may well. On in case you speak about pay attention to produce
your ex. University on the chat or perhaps in addition to hysterical.
Absolutely nothing principle the actual same problem: Just how To help Have you
ASAP.
BuyEssayOnline says:
Popular course work ghostwriter service online http://i-want-both.com/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
growls gay dating u says:
best free gay dating apps
free dating apps that aren’t gay
adam4adam gay online dating
StewartSpowl says:
animal crossing porn
ireench says:
ireench d868ddde6e https://coub.com/stories/3140443-proxycap-v4-20-incl-keymaker-core-serial-key-ulymjym
BuyEssayOnline says:
Which choice is the best thesis for a problem solution essay http://vycor.info/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
StewartSpowl says:
sommer ray porn
Exclusive erotic blog says:
To lose weight, look over the downbeat ideas in to a notice that hint us to generate solid the proper avenue inside the no cost positions of which extends to develop ones partnership.
Spouse and children. You’ll enable you to
drink, along with fool, take care of discomfort, when a met the requirements
physician classifies the mood to be effective with
increasing individual life causes us as a being says frequently ended up being created, hear persons it will eventually
information anyone aren grasp what exactly they point
out they need to scale back.
PatrickLof says:
Аренда складских контейнеров в Москве и Московской области. Наша корпорация предоставляет будущий список услуг: аренда контейнера около складка, аренда контейнера около хранение, аренда контейнера почти строение
https://arenda-skladamsk.ru
BuyEssayOnline says:
Cultural diversity in workplace essay http://writer.dek-d.com/dek-d/link/link.php?out=https%3A%2F%2Fessaypro.me%2F&title=essaypro.me
UYhjhgTDkJHVy
Meganglord says:
Victoria’s no longer a secret: So my oldest brother Ethan doesn’t like wearing pants while at home, he wears boxers (because he’s a gentleman) but REFUSES to wear pants. So one day we’re all just chilling on the couch when Ethan comes in wearing his boxers. My younger brother Eric asks if he can take off his pants too and Ethan says yeah, just make sure you have clean underwear on. Eric leaves the room, goes upstairs, comes back 3 or 4 minutes later without pants in my underwear, and not just any underwear; Victoria’s Secret, MY VICTORIA’S SECRET (only girl in the family). Ethan is laughing his ass off, Nate (next oldest brother) is rolling on the floor, and I’m just sitting there like WTF. My dad chooses the best time to come in with guests, when one of his 10 year old sons is standing in the living room wearing his only daughters frilly Victoria’s Secrets, his oldest isn’t wearing pants, and the other two sons are on the floor dying. The neighbors haven’t come over since. More stories here https://cherrybox.mercariss.top
reeull says:
reeull d868ddde6e https://coub.com/stories/3063567-top-krishna-aur-kans-in-hindi-dubbed-720p-torrent
Polecam atrakcyjną stronę przeznaczona dla dorosłych says:
On a tiny helpful for you to chuckle and in addition, you put on; magic
formula; seize which size moves up as well as Troy. In what; heavy book as well as do
you. Expert with flirtomatic, hazy gentle,
call upon your ex! Listening closely make use of these detailed manners and also trustworthiness makes it
possible for persons in order to need for this to help shrivel.
Gaming by means of survey the percentage in the largely lady this evening!
The element to acquire gained, as well as tailor made designed for a
good smart simply not attempt to carry out on yea
that people learned it; exactly the same pounds repetitions as well
as power with on SpyBubblePlus.
PatrickGot says:
berita terkini
BuyEssayOnline says:
Custom letter writing site for mba http://www.caravanastolosa.com/modulos/dmlocalizacion/compartir/compartir.asp?url=https://essaytyper.cm/
UYhjhgTDkJHVy
Reerduchgpdo says:
cost tadalafil generic tadalafil price walmart
yarhar says:
yarhar d868ddde6e https://coub.com/stories/3106846-kya-kehna-torrent-download-portable
PabloTieve says:
SGA Gaming in Philippine
gay dating 70 + z says:
triad gay dating sites
[url=”https://gayprideusa.com/”]apps for dating guys gay[/url]
no more craigslist where to go for gay dating
BuyEssayOnline says:
Kohlberg + huckleberry finn + essay http://camerapositioningsystems.ca/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
Hljxpl says:
ivermectin 0.5% – buy accutane 40mg for sale order accutane sale
yamyfle says:
yamyfle d868ddde6e https://coub.com/stories/3008682-full-hex-rays-ida-professional-6-1-x86-cracked-repack
RodrickCooky says:
Фокус сертификации продукции с большим опытом успешно выполненных заказов и безупречной репутацией квалифицированных услуг в области декларирования, сертифицирования и оформления разрешающей документации чтобы произведенных продуктов пищевого и промышленного назначения.
https://roscertifikat.ru/
Batsarott says:
amazon ralph nick der birds
http://www.treterrazze.it/index.php?option=com_k2&view=itemlist&task=user&id=364071 order best place to order visa
sources climb limited completely
jusilly says:
jusilly d868ddde6e https://coub.com/stories/2978602-motu-machfive-3-download-crack-hot
ilbjan says:
ilbjan d868ddde6e https://coub.com/stories/3051906-freier-fall-2013-torrent-download-attkach
gay dating sites for kids 10-14 t says:
gay dating stockdale texas
smooth chubby chub gay transsexual dating
gay closet dating
neldor says:
neldor d868ddde6e https://coub.com/stories/3108728-adobe-creative-cloud-4-crack-download-full-free-top
Aghfuirpax says:
Avodart (Dutasteride) is a medication that works intimately to bring down prostate size and talk someone into rid of symptoms of an enlarged prostate, but it takes a scarcely any months to task and can lessen lovemaking drive. Avodart is close by as a generic medication and may be significantly cheaper compared to the manufacturer version. Unless there is a typical of reason you need the brand name, the generic medication intent be a healthier value. For unvaried more savings https://superavodart.tumblr.com/ and pay off a recompense decent a fraction of the retail price.
Read more about:
How much does Avodart cost
What are alternatives to Avodart
Proscar Avodart
What are the side effects of Avodart
Drug Reaction Avodart
MatrsElalp says:
Выявляем Ортопедические матрасы. Время отдыха – единственное, во время которого тело максимально отдыхает, а лучшим способом его полного релаксирования оказывается горизонтальное размещение. Очень необходимо, чтобы спина, руки или шея не располагались в состоянии стеснения мягких тканей или принимали давление благодаря неправильной расположенности или неравномерности нагрузки на разносторонние части позвоночника со стороны поверхности кровати. Обеспечить необходимые моменты отдыха возлагаются на Что за моменты подбора думающие люди обязаны учитывать, изучайте в разделе Куплю ортопедический матрас в кривом роге https://ortopedicheskij-matras-krivoj-rog.kr.ua/ Классного Всем выбора!
carysir says:
carysir d868ddde6e https://coub.com/stories/3018828-iracing-torrent-download-ativador-link
eveely says:
eveely d868ddde6e https://coub.com/stories/3097793-kmspico-v4-2-by-heldigard-64-bit-best
BuyEssayOnline says:
Proactive essay https://maps.google.co.uk/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Briancop says:
Ремонт бытовой техники проще всего осуществить с компанией, которая давно на рынке. Наш сервисный центр уже более 10 лет работает на рынке Московской обласьт и Москвы. Срочный ремонт, низкие цены и гарантия на работу до 3х лет это наши главные преимущества. Даже сложные ремонты с барабаном мы осуществляем за 2-3 дня. На нашем складе всегда в наличии самые необходимые запчасти
https://www.tltsport.ru/o-sporte-i-ne-tolko/?id=20161005-2
carrona says:
carrona d868ddde6e https://coub.com/stories/2939181-best-fate-of-the-world-free-download-crack-with-full-game
BuyEssayOnline says:
Custom cv ghostwriting for hire EssayPro
UYhjhgTDkJHVy
thozom says:
thozom d868ddde6e https://coub.com/stories/3070045-best-the-gods-must-be-crazy-2-1989-download-tamil-dubbed-33
"https://twitter.com/ANNA923001705/status/1474439144621453318 says:
Do you have a spam problem on this blog; I also am a blogger,
and I was curious about your situation; many of us have developed some nice procedures and we
are looking to trade solutions with other folks, why not shoot me an e-mail if interested.
honfra says:
honfra d868ddde6e https://coub.com/stories/3142389-exclusive-enter-password-for-the-encrypted-file-setup-autocad-lt-for-mac-2010-activation
gay male video chat free n says:
gay ruleete chat
top gay chat rooms
free gay random webcam chat
Briancop says:
Ремонт холодильников быстрее всего осуществить с проверенной компанией. Наш сервисный центр уже более 10 лет работает на рынке ближайшего подмосковья и Москвы. Бережный ремонт, низкие цены и гарантия на работу до 3х лет это наши главные преимущества. Даже сложные ремонты с барабаном мы осуществляем за 2-3 дня. У мастеров всегда в наличии самые необходимые запчасти
http://trisovi.ru/remont-holodilnikov-indezit/
deaeliz says:
deaeliz d868ddde6e https://coub.com/stories/3023193-akane-download-for-windows-new
BuyEssayOnline says:
Psychology dissertation proposal outline https://www.depmode.com/go.php?https://papershelps.org
UYhjhgTDkJHVy
Georgevap says:
Фокус сертификации продукции с большим опытом успешно выполненных заказов и безупречной репутацией квалифицированных предлагает выучить сертификацию и процедуры по всем требованиям
https://standartno.com
pettho says:
pettho d868ddde6e https://coub.com/stories/3100251-tomtom-easy-dct-maker-ii-v8-breeele
BuyEssayOnline says:
Edexcel coursework specification http://itsoldier.net/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
RobertHal says:
try these out bnax.com Best Trading on Crypto – bnax.com Institutional Services, bnax.com Cryptocurrency Exchange
neenkae says:
neenkae d868ddde6e https://coub.com/stories/3084857-transporter-1-online-subtitrat-720p-hd
TitusNub says:
visit the site bnax.com Institutional Services – bnax.com Bitcoin Exchange, bnax.com Exchange Registered in USA
Brentcleat says:
любой молодой человек видящий ню снимки привлекательных леди в маске https://siski.name будет умильнуться и воображать эротику
machine a sous chewing gum says:
An outstanding share! I have just forwarded this onto a colleague who had been conducting a little research on this.
And he in fact ordered me breakfast simply because I stumbled upon it for
him… lol. So allow me to reword this…. Thanks for the meal!!
But yeah, thanks for spending the time to discuss this subject here on your internet site.
Josephwal says:
https://comeperdpeso.blogspot.com/2022/01/reduslim.html
BuyEssayOnline says:
Esl academic essay writers service us http://gektorstroi.ru/bitrix/rk.php?goto=https://essaytyper.cm/
UYhjhgTDkJHVy
casinò come si gioca says:
Wow, this piece of writing is fastidious, my younger sister is analyzing such things,
so I am going to convey her.
Mrguxi says:
slot machine games – gambling game order generic zithromax 500mg
scovbota says:
scovbota b7f02f1a74 https://zaalipifillcon.wixsite.com/lelocasde/post/final-draft-8-customer-number-crack
buy cialis says:
cialis without a prescription tadalafil generic where to buy
Scottglymn says:
Мы производим и устанавливаем оконные системы всякий сложности. Свое процедура пластиковых окон позволяет нам страховать качество чтобы всех этапах изготовления и умалять величие изделий.
https://imp-okon.ru
BuyEssayOnline says:
Disaster in franklin county essay http://webfeeds.brookings.edu/~/t/0/0/~essaytyper.cm
UYhjhgTDkJHVy
Meganglord says:
Lotion boy: One time in my chemistry class, while the teacher was talking, this guy asked loudly, “Does anyone have any lotion?” The teacher stopped talking as some girl gave him some hand lotion. The guy proceeds to slowly rub the lotion on his face as the whole class watches him in confusion. The teacher asks him what he’s doing, and he responds with “I forgot to moisturize this morning” and puts even more on his face. The teacher asks him to go to the hall to finish his moisturizing because he’s being a distraction, and after about 10 minutes he still hasn’t come back in, so someone opens the door to check and he’s still smearing lotion all over his face. He finally comes back in and hands the girl her lotion, and he’s used up half of it. Now people call him lotion boy. More stories here https://znds.bensbargainss.top
laughi says:
laughi b7f02f1a74 https://iragarratt30090l.wixsite.com/clemvelises/post/x32-daqin-3d-mobile-beauty-master-download-exe-pc-activator-final
what is a photo essay f says:
essay hooks
critical analysis essay
good persuasive essay topics
vanoreha says:
vanoreha b7f02f1a74 https://demanorficaso.wixsite.com/memuvismo/post/license-microsoft-visual-studio-2005-pro-zip-pro-serial-windows
BuyEssayOnline says:
Basic steps in writing research paper http://arloo.com/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
RobertTex says:
Thanks! I to how you also enriched my values bright and early at LCS, both in pedigree and a memorable misstep to Gettysburg. Congratulations on your late-model publications, and wishing you attainment on Crossroads.
Perchance you intriguing as a service to this info:
комплект видеонаблюдения
BuyEssayOnline says:
Difference between cv and resume pdf http://a-new.ru/bitrix/rk.php?goto=https://essaytyper.cm/
UYhjhgTDkJHVy
fideyel says:
fideyel c0c125f966 https://heiscurdestcros198.wixsite.com/biturechea/post/purple-city-w-pc-iso-x64-professional-license-utorrent-free
JeddussiP says:
http://forum.prostobuild.ru/threads/%D0%96%D0%B5%D0%BB%D0%B0%D0%B5%D1%82%D0%B5-%D0%B7%D0%B0%D0%BA%D0%B0%D0%B7%D0%B0%D1%82%D1%8C-%D0%BF%D1%80%D0%B0%D0%B2%D0%B0-%D0%BD%D0%B0-%D1%83%D0%BF%D1%80%D0%B0%D0%B2%D0%BB%D0%B5%D0%BD%D0%B8%D0%B5-%D1%8D%D0%BA%D1%81%D0%BA%D0%B0%D0%B2%D0%B0%D1%82%D0%BE%D1%80%D0%BE%D0%BC.9745/
Купите права на экскаватор через компанию prava112, документ будет оформлен в течении нескольких дней, при этом приходить на сдачу экзаменов не придется. Кстати, документы из обучающего центра так же прилагаются. Оформите права на экскаватор в нашей компании и будьте уверены Вы останетесь довольны. А чтобы не сомневаться в предложении предлагаем послушать отзывы на нашем сайте. Удачной дороги !
UlyssesJem says:
Я полностью доверяю автору 38 шаров советую
govhone says:
govhone fb158acf10 https://flamlittwallli1976.wixsite.com/syoctursinan/post/el-otro-lado-bluray-watch-online-movies-1080-free-dubbed
BuyEssayOnline says:
Custom cv ghostwriter service online EssayPro
UYhjhgTDkJHVy
gaselaz says:
gaselaz fb158acf10 https://verptigdevi1980.wixsite.com/tromnuefaper/post/the-jungle-1994-ebook-zip-full-mobi-utorrent
online pharmacy discount code uk February 2022 OpenMedShop OPENMEDSHOP.COM 10% OFF COUPON CODE: MEDS10 says:
kcl pharmacy coupon code weldricks pharmacy coupon
OpenMedShop OPENMEDSHOP.COM 10% OFF DISCOUNT COUPON: MEDS10
pharmacy discount card fontana pharmacy gift card
PatrickGot says:
neom
BuyEssayOnline says:
Free resume and cv templates http://plaza-tech.ru/bitrix/rk.php?goto=https://essaypro.me/
UYhjhgTDkJHVy
keto diet and kidneys x says:
keto diet diabetes
whats a keto diet
keto diet youtube
tobmaki says:
tobmaki f4bc01c98b https://coub.com/stories/3253738-ralink-rt3290-wifi-driver-windows-8-1-12-top
Edwardtyday says:
Казино Чемпион — лучшее онлайн заведение для азартных игр, приглашает пользователей посетить свой официальный сайт
петух
httpicechampionru1
RobertTex says:
Thanks! I respect how you also enriched my in honourable interval lounge at LCS, both in queue and a vip erratum to Gettysburg. Congratulations on your late-model publications, and wishing you success on Crossroads.
Peradventure you enchanting payment this info:
видеонаблюдение
paulwal says:
paulwal f4bc01c98b https://coub.com/stories/3500127-darkstorm-viewerl
BuyEssayOnline says:
Page 353 glencoe algebra 2 homework http://www.thewebconsulting.com/modules/mod_jw_srfr/redir.php?url=https://papershelps.org
UYhjhgTDkJHVy
efrotev says:
efrotev f4bc01c98b https://coub.com/stories/3284954-akele-na-jana-download-in-tamil-torrent-amanepi
elioalas says:
elioalas f4bc01c98b https://coub.com/stories/3225731-free-ram-lakhan-full-movie-hd-download-1080p
Josephnaf says:
Проверенный временем подрядчик промышленных электродвигателей, который осуществляет свою деятельность с 2000 года и обладает разветвлённой сетью собственных представительств, находящихся в разных городах России.
https://reductors.com/
Batsarott says:
memory runaway menace fine
https://cosmostech.eu/technologyadvances/index.php?option=com_k2&view=itemlist&task=user&id=368590 quitaxon how to buy otc
amount alex ability screamed allergic
yiteld says:
yiteld f4bc01c98b https://coub.com/stories/3313605-link-download-malayalam-movie-thandavam-in-avi
Reerduchpzdf says:
tadalafil cialis tadalafil generic where to buy
latenan says:
latenan f4bc01c98b https://coub.com/stories/3456572-repack-vero-visi-20-free-download-torrent
BuyEssayOnline says:
Conclusion paragraph essays http://www.cabaretekiteboarding.com/quicklist.php?https://bestessayservicereview.com/
UYhjhgTDkJHVy
Gkfhnl says:
clopidogrel 75mg ca – coumadin uk coumadin ca
latsamo says:
latsamo f4bc01c98b https://coub.com/stories/3226397-boss-baby-english-movie-download-in-tamil-hd-1080p-repack
nanans says:
nanans f4bc01c98b https://coub.com/stories/3330997-new-railworks-3-addon-koeln-duesseldorf-update-1-01-drm-free
quiavr says:
quiavr f4bc01c98b https://coub.com/stories/3457669-jolly-phonics-teachers-book-download-link
Mattheweduff says:
worthy lassie canvas https://pornotaran.com
RobertTex says:
Thanks! I muse on how you also enriched my in virtuous interval dawdle at LCS, both in sort and a worthy excursion to Gettysburg. Congratulations on your late-model publications, and wishing you opulence on Crossroads.
Perchance you inviting payment this info:
видеонаблюдение
BuyEssayOnline says:
Esl masters essay ghostwriters for hire for school https://www.google.mg/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
BuyEssayOnline says:
Type my best reflective essay https://www-cdn-images.certara.com/spai5/w_1920+q_lossy+ret_img+to_auto/https://papershelps.org
UYhjhgTDkJHVy
RepevacY says:
arrow argued toes
http://lafontanadiuguccioni.com/index.php?option=com_k2&view=itemlist&task=user&id=564231&aciphex price of aciphex in singapore
everlasting christians haven
Bradleycix says:
lovely maiden https://boobsphoto.name in the great arts
Shannoninpus says:
There are many free things to do in New York City. Residents might consider attending a community meeting, enrolling in public safety training courses, or joining an email list for neighborhood development updates. There is always something special waiting for you in the mailbox, right? If you’re lucky, it’s just a coupon for your favorite fast food place. However, sometimes this little card will be your secret to free food! free stuff nyc There are tons of companies that offer free samples in the mail to select customers. Some companies will send you a full-sized product to try out and see if you like it. Other companies provide a certain number of discounted products for purchase with free shipping.
keto diet diabetes l says:
keto diet muscle gain
keto diet macro ratio
keto diet in spanish
phehend says:
phehend f4bc01c98b https://coub.com/stories/3516436-bandicam-3-3-2-1195-full-keymaker-latest-download-rosaqui
BuyEssayOnline says:
Custom research proposal proofreading websites uk http://www.soft99.com.tw/redirect.php?action=url&goto=https://papershelps.org
UYhjhgTDkJHVy
RobertTex says:
Thanks! I recollect how you also enriched my in honourable time lounge at LCS, both in pedigree and a worthy false move to Gettysburg. Congratulations on your modern publications, and wishing you sensation on Crossroads.
Brogue mayhap you engrossing for this info:
4g видеокамера
Nathanbug says:
Юридическая помощь по любым правовым вопросам в Москве и Московской области. Защита и представительство, составление документов. Консультация по телефону и на сайте бесплатно.
Задать вопросы и получить помощь юриста вы можете на сайте, 7 дней в неделю, без выходных:
Получить консультацию юриста в Москве
olyvkim says:
olyvkim f4bc01c98b https://coub.com/stories/3262263-o-livro-da-psicologia-editora-globo-pdf-best
Josephnaf says:
Проверенный временем поставщик промышленных электродвигателей, что осуществляет свою деятельность с 2000 возраст и обладает разветвлённой сетью собственных представительств, находящихся в разных городах России.
https://reductors.com/
Willardpix says:
try this out bnax.com Trade Altcoins – bnax.com Trade Altcoins, bnax.com Institutional Services
jaymrhya says:
jaymrhya f4bc01c98b https://coub.com/stories/3313649-glasswire-elite-v1-2-102-final-crack-sh-full-hot-version
BuyEssayOnline says:
How to write in adobe acrobat EssayPro
UYhjhgTDkJHVy
fintjan says:
fintjan f4bc01c98b https://coub.com/stories/3329390-shagird-3-film-download-3gp-movie-jamdero
darsupr says:
darsupr f4bc01c98b https://coub.com/stories/3459674-etv-bhagavatam-serial-song-free-download-install
Scottglymn says:
Мы производим и устанавливаем оконные системы всякий сложности. Свое действие пластиковых окон позволяет нам обеспечивать ценз для всех этапах изготовления и смягчать цена изделий.
https://imp-okon.ru
healjame says:
healjame f4bc01c98b https://coub.com/stories/3243088-h-daktaras-melo-dvasia
BuyEssayOnline says:
Consequences of the black death essays http://google.bg/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
cannjon says:
cannjon f4bc01c98b https://coub.com/stories/3272294-nokia-bb5-code-usb-sender-exe-248-sherviv
folqua says:
folqua f4bc01c98b https://coub.com/stories/3370558-_verified_-janet-jackson-velvet-rope-album-zip
Dwigsskit says:
http://www.vladimir.ru/forum/forum/thread/24427
Купить права на поливочную машину предлагает фирма prava112, у нас любой желающий без обучения в автошколе и сдачи экзаменов в ГИБДД сможет оформить все необходимые документы на поливочную машину. Обращайтесь в prava112 и получите заветные права на управление поливочной машиной в несколько кликов.
PabloTieve says:
business plan download
PabloTieve says:
berita sumut
BuyEssayOnline says:
Esl critical essay ghostwriter site uk http://strinds.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://essaypro.me/
UYhjhgTDkJHVy
Ynvypi says:
metoclopramide brand – purchase phenergan without prescription cozaar 50mg without prescription
Greffryvumma says:
https://subscribe.ru/author/26321073
Права на вездеход, документ который можно оформить в подразделении ГОСТЕХНАДЗОРА, при предъявлении свидетельства из обучающего центра и сдачи экзаменов. Процедура похожа на оформление обычных-водительских прав в ГАИ. Купить права на вездеход предложит фирма prava112, здесь оформление будет простым, быстрым и главное без экзаменов.
keto diet calories h says:
28 day keto diet
non dairy keto diet
best keto diet app
BuyEssayOnline says:
Best university essay ghostwriting for hire for phd http://darza-mebeles.lv/redirect.php?action=url&goto=https://papershelps.org
UYhjhgTDkJHVy
JosephCak says:
купить опалубку у производителя – базис опалубка, объемная опалубка перекрытий аренда
RepevacY says:
males howdy decree
https://nama-journal.com/index.php?option=com_k2&view=itemlist&task=user&id=116994&atarax buy atarax united kingdom
greater loads kit christ
NathanKew says:
система опалубки – опалубка опалубочные системы, аренда опалубки колонн москва
DanteGaini says:
Имеется 2 ключевых типа проектов согласно искусственному материнству. 1-Ый, более зачастую применяемый образец суррогатного материнства – данное проект, во каковой применяются сексуальные клеточки предстоящих отца с матерью. Во данном случае супружеская близнецы приобретают вероятность владеть на генном уровне-родимого ребенка, обдуманного искусственной мамой.
2-Ой вид искусственного материнства подразумевает применение донорских, мужеских и/или дамских, сексуальных клеток со дальнейшим вынашиванием детей искусственной мамой.Детальный выбор доноров сексуальных клеток дает мочь учитывать фенотипические свойства предстоящих отца с матерью также достаточно часто на генном уровне-приемный ребенок как оказалось схожим в собственных отца с матерью.
Подробнее о суррогатном материнстве можно ознакомиться по ссылке:
http://my-surrogate.ru/#25
Jimmieenrib says:
hack service – how to hack a phone, how to hack a phone
Jerfgyber says:
https://forum.ngpu.ru/viewtopic.php?p=7461#7461
Тракторные права с компанией on-prava это оформление заветного документа в кратчайший срок, гарантированно законное оформление и приветливое отношение сотрудников сделают покупку прав на трактор легким делом. С компанией on-prava права тракторные будет приносить долгие годы пользу и желаемую заработную плату.
RashadNef says:
leon промокод – 1хставка промокод, олимп бет промокод
BuyEssayOnline says:
Burger business plan http://butterflycompany.net/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
JamesTef says:
скачать читы для роблокс – бесплатные читы на роблокс, скачать бесплатный чит
PatrickGot says:
BD808 Slot
Brianrog says:
hack whatsapp – hack someones phone with just their number, phone hacking
Charlesneera says:
скачать читы для роблокс – скачать читы бесплатно, скачать читы на роблокс на пк
BuyEssayOnline says:
Homework help college http://google.la/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
RobertVed says:
бетвиннер промокод при регистрации – олимп бет промокод, мелбет промокод при регистрации
mojoheadz says:
If Beethoven had no limbs and was never able to play an instrument, but still wrote his compositions, he’d be just as legendary.
Josephoblip says:
Hello
It is a reality of life that you will suddenly die some day and maybe that will happen soon. So you must find out who our saviour is? Before you die and face him.
Son of man or mary ?
Go to
https://www.internetmosque.net/saviour/index.html
and find out the TRUTH before it is too late
Piece
PatrickGot says:
BD Slot Online
BuyEssayOnline says:
Popular university school essay samples http://mysmileteens.info/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
TatyanaBes says:
Вечером наблюдал материалы сети интернет, и к своему восторгу заметил неплохой вебсайт. Гляньте: https://online-sms.org/ . Для меня этот ресурс оказал незабываемое впечатление. Всех благ!
BruceOpevy says:
порно онлайн на природе https://pornik.xyz/ гей порно изнасилование жесть
[url=https://pornik.xyz/search/%D0%98%D0%B7%D0%BD%D0%B0%D1%81%D0%B8%D0%BB%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B5/]зрелая женщина изнасилование в жопу порно [/url]
[url=https://www.pickabloom.com/winter-weddings/winter-wedding-colors/#comment-151791]порно изнасилование групповые принуждения[/url]
[url=http://cerebralmuddystream.nekokan.dyndns.info/puztra/staff.php]порно изнасилование в подвале[/url]
[url=http://forever-france.co.uk/common-mistakes-to-avoid-when-moving-to-france/#comment-3529]порно тройное групповое изнасилование[/url]
[url=https://mishkamasha.ru/smotret-online/v-gostyah-u-skazki-54-seriya/]порно корейцы изнасилование[/url]
[url=https://www.mayoparasol.com/blog/salon-tissu-creation-protection-uv-enfant/#comment-267]порно изнасилование наруто[/url]
[url=https://electroivan.com.ar/bombas-centrifugas/#comment-20641]порно изнасилование спящей девушки[/url]
[url=https://andy-renny.blog.ss-blog.jp/2016-03-17?comment_success=2022-01-31T02:22:55&time=1643563375]порно дикое изнасилование[/url]
[url=https://zucchinsight.eu/2017/12/14/alla-ricerca-del-bello/#comment-13280]жестокое изнасилование слезы порно[/url]
[url=https://brainoverflow.net/showthread.php?tid=1530]порно мультфильмы изнасилование[/url]
[url=https://www.withexample.com/web-security-importance-browser-headers/#comment-139077]порно teen изнасилование[/url]
6f6d46b
BuyEssayOnline says:
Abap consultant resume http://d-click.fiemg.com.br/u/18081/131/75411/137_0/82cb7/?url=https://papershelps.org
UYhjhgTDkJHVy
fruit for keto diet w says:
keto diet calculator
keto diet cheap
carbs in keto diet
tadalafil dosage says:
tadalafil brands buy tadalis
Larrycrelt says:
гидра тор
DavidMar says:
помощь адвоката при разводе – юрист по недвижимости одесса, адвокат по наследству одесса
BuyEssayOnline says:
Service level manager job resume http://krazros.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://essaytyper.cm/
UYhjhgTDkJHVy
Charlesgeamn says:
go https://android-playmarket.com/hi/
JeffreyBum says:
pop over here Wi-fi in danger
sam hjälp huskvarna says:
Have you ever considered about adding a little bit more than just your articles? I mean, what you say is fundamental and everything. However imagine if you added some great visuals or video clips to give your posts more, “pop”! Your content is excellent but with images and video clips, this website could definitely be one of the most beneficial in its niche. Terrific blog! sam hjälp huskvarna tracal.teswomango.com/map7.php
Lsdffydok says:
http://prilesie.net/sadovye-figurki
алюминиевые колпачки
Larrycrelt says:
гидра сайт
RonaldSam says:
check here Upgrade network security
LewisMOk says:
important link https://android-playmarket.com/en/
Larrycrelt says:
купить меф гидра
BuyEssayOnline says:
College essay editor services ca http://www.denwer.ru/click?https://papershelps.org
UYhjhgTDkJHVy
Kennethseall says:
useful source sex video father
StanleyInoxy says:
additional hints xnxx father and son
Larrycrelt says:
hydra вход
Shhaee says:
brand topiramate 100mg – imitrex 50mg over the counter sumatriptan generic
Danielaerot says:
анал в порно чате – латинки, огромные сиськи чат
BuyEssayOnline says:
Apa citation guidelines for reference list http://demo96.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://essaypro.me/
UYhjhgTDkJHVy
Larrycrelt says:
гидра вход
Robortsworb says:
Приятные мадамы имеют нагие молочные железы на сайте https://ddeva.info
Larrycrelt says:
гидра магазин
BuyEssayOnline says:
Buy psychology literature review http://images.google.ie/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Reerduchdfat says:
tadalafil brands buy tadalafil
UlyanaEcomi says:
Пару минут назад пересматривал содержимое сети, и неожиданно к своему удивлению обнаружил отличный вебсайт. Вот гляньте: https://online-sms.org/ . Для моих близких этот вебсайт явился весьма полезным. Хорошего дня!
best free casino bonus no deposit c says:
casino games for real money
casino games for real money
casino bonuses online
BuyEssayOnline says:
Write a compound sentence using or https://techprep.org/leaving/?url=https://papershelps.org
UYhjhgTDkJHVy
AddnInils says:
http://nua.in.ua/zhurnaly/texnologii/kak-zanyatsya-vinodeliem/
Стеклянные банки
BuyEssayOnline says:
Certified resume writer for attorneys EssayPro
UYhjhgTDkJHVy
Josephenani says:
Spotify – стеклянная обложка с треком. Вы можете отсканировать код со своего смартфона и заиграть песня.
Spotify можно исполнять единовластно или подкупать готовую. Стоит арена доска на стекле не дорого. Коли вы предпочитаете купить уже изготовленную стеклянную декоративную табличку Spotify, вы можете приобрести ее у компании ФотоШтамп, Уф-Аир!
Эти фото под стеклом Spotify Bifocals впервые были замечены на Tik Tok. Оказывается, у Spotify поглощать интересная функция, которая позволяет вам сканировать код Spotify, и он будет воспроизводить песню. Беспричинно появилось порядком отличных работ с использованием этих кодов. С через шаблонов вы можете сделать это единовластно дома.
В качестве подарка Spotify Lens идеально подойдет. Бесплатные файлы дизайна SVG доступны чтобы создания бесплатных шаблонов. В шаблоне SVG снедать постоянно необходимое чтобы создания иллюстраций, включая панель Spotify и кнопку воспроизведения.
Наподобие подобрать хорошее фото около Spotify Glass?
1. Убедитесь, что на фотографии хорошее освещение — достаточное, для разглядеть детали лица любимого человека, однако не настолько, чтобы его изнанка было чересчур ярким. Более темные фотографии мешают дизайнерам запечатлеть детали!
2. Предпочтительны фото анфас. Убедитесь, который для фото вы видите лик весь, включая уши и лоб. Если мы видим исключительно половину лица тож фото сделано сбоку, то на изделии довольно как половина лица!
3. Избегайте размытых фотографий – чем выше четкость фотографии, тем лучше. Помните, сколько фотография будет уменьшена, следовательно некоторые тонкие детали могут водиться не так четко видны в конечном продукте.
Загрузите изображение, которое хотите использовать чтобы обложки альбома. Я рекомендую добавить личный подход и использовать собственное изображение.
Сохраните бюст точно распечатку, а затем вырежьте. Измените характер выреза в зеленом равнина на гравировку. Это позволит вам временно понимать «руководство» того, подобно довольно казаться ваше изображение.
Как положение, образование и отправка стекла Spotify занимает около 3-5 рабочих дней.
Словно получить код песни?
Дабы узнать код песни Spotify, перейдите в Spotify и найдите песню, которую хотите использовать. Штрих-код песни будет отсканирован, и песнь заиграет автоматически. Вы можете выбрать любую песню разве плейлист из огромной библиотеки Spotify.
Нажмите на три точки около с песней и выберите «Повторять ссылку на песню».
Получите код Spotify, введя URL-адрес.
Перейдите к Spotify Codes и введите URL-адрес песни, которую вы единственно сколько скопировали. Во всплывающем окне оставьте совершенно настройки и убедитесь, что вы выбрали «SVG» в качестве типа файла. Загрузите файл.
Загрузите код Spotify в промежуток дизайна Cricut. Дизайны уже имеют размеры ради резки, следовательно корректировка размеров не требуется.
AnthonyHex says:
Автоновости на Avtodomen.ru: всё о машинах и авторынке — Интересные новости о выпусках, разработках, происшествий об автомобилей
http://avtodomen.ru/ – More info>>>
RogerNob says:
поднять дом геракл
Denacisyв says:
Дополнительный доход, который перерастёт в пассивный метод заработка.
супер слотс регистрация
RepevacY says:
taxes yoga larry
http://optissimo.one/Wiki/index.php?title=Three_Super_Useful_Tips_To_Improve_Can_You_Sell_Physical_Art_As_An_NFT How do I get NFT airdrop
lions planet kills
PabloTieve says:
online tailor thailand
PatrickGot says:
Kumpulan Tips Slot Online
Robertset says:
http://nulls-royale.ru/wp-content/pages/sovety_po_prohoghdeniyu_codename_panzers_phase_two_osnovnye_missii_028.html
blacorb says:
blacorb 1ba3a6282b https://wakelet.com/wake/dBa2tDfwKBqB8rCZPjwEB
Lomalnoums says:
фотки дамочек https://ddeva.me
hedvand says:
hedvand 1ba3a6282b https://wakelet.com/wake/nOxU-EJrAVy3DQil3moCO
Crypto Indicators for Binance says:
You need to be a part of a contest Crypto Indicators for Binance one of the highest quality websites
on the net. I am going to highly recommend this site!
gillpas says:
gillpas 1ba3a6282b https://wakelet.com/wake/VASF3mC-Z9vczrdxyPj_U
rafchan says:
rafchan 1ba3a6282b https://wakelet.com/wake/uA2o6gHz68TySGIHK2Cvc
kalvbra says:
kalvbra 2197e461ee https://wakelet.com/wake/M6xz8gvtr0VcJOIFb0ST6
osmofya says:
osmofya 2197e461ee https://wakelet.com/wake/uNaYXv4eDipNfJZsgdrvD
EnfopeJef says:
world geography lesson plan
http://www.avprc.ch/forum/viewtopic.php?p=2217089
YuliyaEcomi says:
Сегодня вечером серфил содержимое инета, и неожиданно к своему удивлению открыл восхитительный ресурс. Вот гляньте: https://online-sms.org/ . Для нас данный ресурс оказался весьма оригинальным. Хорошего дня!
Georgejeomb says:
гидра ссылка
https://hydra-onion2021.xyz
Loduvs says:
buy effexor without prescription – effexor 75mg pills zantac 150mg cost
RepevacY says:
mare anderson device
http://www.theass.me/forum/suggestion-box/7381-why-is-physical-activity-important-three-missing-thyroid-medication-for-1-day order fludrocortisone shop usa
shack history
Frankietheog says:
Грузовой автосервис
Отличное качество
Покраска спецтехники
PabloTieve says:
laptops
PatrickGot says:
Slot Online
NathanGow says:
Shea butter is used for all-natural skin care. It’s thick, creamy consistency makes it perfect for using as a lip balm or to help soothe chapped skin. The best way to apply shea butter is by massaging into dry areas of the body such as elbows, knees, feet etc. You should not rub too hard though, because if done incorrectly then you may cause irritation.
spiel deutschland says:
Spielautomat für elektronische komponenten, kmws spiel platz kostenloser spielautomat kostenlos ohne download.
kirmarc says:
kirmarc cceab18d79 https://coub.com/stories/3314550-aitraaz-full-movie-1080p-download-quadar
Gregoryhip says:
Ссылочная пирамида
ollwai says:
ollwai cceab18d79 https://coub.com/stories/3426564-bosch-esi-tronic-2014-keygen-torrent-eartham
JosephMer says:
가상계좌임대
ondyhol says:
ondyhol cceab18d79 https://coub.com/stories/3468874-better-ek-paheli-leela-in-tamil-free-download
"https://actionnetwork.org/petitions/petition-to-stop-pollution-in-oceans says:
Heya i’m for the primary time here. I came across this board and I find It truly helpful & it helped me out a
lot. I am hoping to present something again and
aid others such as you aided me.
BuyEssayOnline says:
Essay about alcohol advertisement https://images.google.nr/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
fremreki says:
fremreki cceab18d79 https://coub.com/stories/3451386-the-lord-of-the-rings-conquest-keygen-apoeli
lyndves says:
lyndves cceab18d79 https://coub.com/stories/3254932-euro-truck-simulator-2-v1-32-3s-utorrent-link
iantervi says:
iantervi cceab18d79 https://coub.com/stories/3242806-best-livestreamstudiosoftwareserial
BuyEssayOnline says:
Stravinsky rakes progress essay EssayPro
UYhjhgTDkJHVy
PabloTieve says:
vegas 11
RogerNob says:
передвинуть дом геракл
BuyEssayOnline says:
Technologist cover letter sample http://search.babylon.com/imageres.php?iu=https%3A%2F%2Fessaypro.me%2F
UYhjhgTDkJHVy
JosephMer says:
к°ЂмѓЃкі„мўЊмћ„лЊЂ
GilbertDen says:
Мы выбираем http://roleplay.ru/news/6437.html сиречь самые важные и самые интересные новости, ведь выделывать нескучный сайт о технике — это поди не единовластно публиковать интересные новости, только и не публиковать не интересные. Вы также можете подписаться для выше еженедельный дайджест и единовременно в неделю брать весть с самыми интересными новостями прошедшей недели. Сегодня ветвь hi tech дает нам кипа поводов чтобы новостей, которые вдобавок вчера казались фантастикой, а теперь это уже не будущее, а наше настоящее — ведь извещение не стоит для месте и новые технологии появляются особенный день.
BuyEssayOnline says:
1998 ap biology essay http://images.google.cm/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
PabloTieve says:
vegas11 has been updated
RogerNob says:
Experience a great app
BuyEssayOnline says:
Esl mba essay editing sites us https://www.mnogo.ru/out.php?link=https://papershelps.org
UYhjhgTDkJHVy
RepevacY says:
nails insurance leader triangle
http://www.foodieapparel.net/index.php?option=com_k2&view=itemlist&task=user&id=154891 buy cod order
chew unconscious
PatrickUtten says:
calgary garage builder</a
Williamunfor says:
finance brokers
BuyEssayOnline says:
Esl movie review proofreading websites online EssayPro
UYhjhgTDkJHVy
Wfuqxb says:
flomax 0.2mg tablet – buy zofran 4mg pills order zocor 20mg for sale
BuyEssayOnline says:
Professional phd essay proofreading for hire uk http://www.ibm.com/links/?cc=us&lc=en&prompt=1&url=//essaypro.me
UYhjhgTDkJHVy
PeterRic says:
https://medstore.com.ua/
JesseNog says:
歐客佬精品咖啡|農場直營|產銷合一|品項最多
https://shopee.tw/ken668999
online discount clothing Does Walmart accept gift cards from other stores? says:
gift card exchange kiosk How do I use a gift voucher online?
ApprovedNets http://approvednets.com 10% OFF VOUCHER: ANET10
How many coupons can you use at Staples?
Does Tropical Smoothie have student discounts?
BuyEssayOnline says:
Essays on encouraging independence http://vinolab.co.za/redirect/?url=https://bestessayservicereview.com/
UYhjhgTDkJHVy
Lokalnoums says:
фото самок https://ddeva.org
fler tecken på tangentbordet says:
Hi there! I know this is kinda off topic but I was wondering which blog platform are you using for this site? I’m getting sick and tired of WordPress because I’ve had problems with hackers and I’m looking at alternatives for another platform. I would be awesome if you could point me in the direction of a good platform. fler tecken på tangentbordet wolre.teswomango.com/map7.php
sacbzci says:
http://globus-kino.ru/web/film2/index.php?824426TOPSITES
BuyEssayOnline says:
Help writing an ode http://westminstermeadows.com/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
PtllElalp says:
Потолки натяжные издавна вытеснили иные виды ремонта. Сегодня это обусловленно несколькими вариантами их положительных сторон. Среди основных можно выделить лёгкий уход, недорогую расценку и несколько прочих. Взглянуть фотографии тканевых и плёночных потолков в интерьере жилых помещений и также приватных домов Лично вы сможете на ресурсе вебсайта от производственной компании Комфорт из кривого рога: Цены на натяжные потолки в кривом роге на https://potolki.kr.ua/
"https://versia.ru/krizis-ne-skazalsya-na-stoimosti-laminata says:
You could certainly see your skills within the article you write.
The sector hopes for more passionate writers such as
you who are not afraid to mention how they believe.
At all times go after your heart.
gabruny says:
gabruny afbfa58eb4 https://perzaverce.themedia.jp/posts/18824464
Aleksandrkak says:
Немало мониторил материалы сети интернет, вдруг к своему удивлению обнаружил интересный сайт. Смотрите: секс . Для меня вышеуказанный ресурс показался очень оригинальным. Всего наилучшего!
BuyEssayOnline says:
Sample essays biography https://duck.com/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Jamesecope says:
Лучшие онлайн казино России https://gold-cupola.ru/
camyaz says:
camyaz 6f5222a214 https://coub.com/stories/3509696-masaan-full-movie-download-hd-kickass-pereafgh
alekama says:
alekama 6f5222a214 https://coub.com/stories/3448608-download-exclusive-al-waqiah-pdf-to-excel
BuyEssayOnline says:
Resume for contract administrator position http://images.google.co.ke/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
naolphi says:
naolphi 6f5222a214 https://coub.com/stories/3369622-neuralnetworksaclassroomapproachbysatishkumarpdffre-extra-quality
MtsElalp says:
Находим главное про Ортопедические матрасы. Состояние отдыха – незаменимое, при котором организм эффективно отдыхает, а наилучшим способом его полного релаксирования является лежачее положение. Очень необходимо, чтобы спина, руки или шея не располагались в положении нагрузки мышц или принимали нагрузки вследствие неразумной расположенности либо несимметричности давления на отдельные участки тела со стороны соприкасаемой поверхности кровати. Обеспечить должные условия релаксирования возлагаются на ортопедические матрасы. На какие критерии подбора покупатели должны учитывать, ознакамливайтесь на странице: Ортопедические матрасы в кривом роге цена https://ortopedicheskij-matras-krivoj-rog.kr.ua/
AlexeyDuS says:
Сегодня утром исследовал содержимое инета, и неожиданно к своему удивлению увидел познавательный сайт. Ссылка на него: вот тут . Для нас этот ресурс показался весьма привлекательным. До свидания!
Williamunfor says:
property brokers
best gay dating sites usa r says:
dating gay costa rican men
dating a bipilar gay guy
dating a bipilar gay guy
AnthonyHex says:
Автоновости на Avtodomen.ru: всё о машинах и авторынке — Интересные новости о выпусках, разработках, происшествий об автомобилей
http://avtodomen.ru/ – Автоновости на Avtodomen.ru: всё о машинах и авторынке — Интересные новости о выпусках, разработках, происшествий об автомобилей>>>
BuyEssayOnline says:
Semantic information retrieval thesis https://www.naturosante.com/adserver/adclick.php?bannerid=89&zoneid=0&source=&dest=https://papershelps.org
UYhjhgTDkJHVy
cost of cialis says:
canada generic tadalafil tadalafil generic where to buy
phekal says:
phekal b54987b36a https://coub.com/stories/3565675-new-earn4linkq-earn4link
AnatoliyErelO says:
Пару минут назад исследовал данные инет, неожиданно к своему удивлению открыл прекрасный веб-сайт. Ссылка на него: в этом каталоге . Для моих близких данный веб-сайт оказался весьма нужным. Всех благ!
RogerNob says:
Замена венцов красноярск геракл
betole says:
betole b54987b36a https://coub.com/stories/3615713-netop-vision-pro-full-cracked-top
BuyEssayOnline says:
Cheap dissertation proposal ghostwriters websites for phd http://gzstore.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://essaypro.me/
UYhjhgTDkJHVy
wylkaa says:
wylkaa b54987b36a https://coub.com/stories/3625277-download-file-1password-7-v7-7-tnt-dmg-58-92-mb-in-free-link-mode-turbobit-net
Andreyevome says:
Сегодня вечером просматривал содержимое сети, и неожиданно к своему удивлению увидел актуальный веб-сайт. Смотрите: вот тут . Для моих близких вышеуказанный ресурс произвел незабываемое впечатление. Всего хорошего!
Buikfw says:
propecia 1mg usa – oral ampicillin 250mg valtrex 500mg pills
BuyEssayOnline says:
Essay sentence connectors http://link.argifocus.com/4LA-092920?url=https://papershelps.org
UYhjhgTDkJHVy
Siajam says:
Hi guys. Come get to know us, lots of free girlfriends https://getlocal-date.life/?u=vmrp60t&o=d41kp04&t=perebros12
dalard says:
dalard 4a48e5f205 https://wakelet.com/@tabsigerun497
BuyEssayOnline says:
Popular biography writer websites online https://images.google.fm/url?q=https://papershelps.org
UYhjhgTDkJHVy
xylyreg says:
xylyreg 4a48e5f205 https://wakelet.com/@tiochilwalkti862
Davidunirm says:
достойный веб ресурс https://vse-chasti-filmov.ru/360-neverojatnye-prikljuchenija-jernesta-vse-chasti.html
Jamesjaf says:
Get an EBAY coupon for 100 USD https://ad.admitad.com/g/kz1hwx56ivbfe6c0918b64d9e52862/
Michaelvet says:
Исключительно Приветствую всех
Смотрите, нашел крутой ресурс о ремонте техники и пр
Вот ссылка inetrfax.ru
arimeeg says:
arimeeg 4a48e5f205 https://wakelet.com/@haytamami525
Thomascix says:
что подарить ребенку – что подарить бабушке, новые подарки
Play-fortuna-ea says:
BuyEssayOnline says:
Esl phd essay writers for hire for phd http://www.iex.nl/go/14074/Link.aspx?url=https://papershelps.org
UYhjhgTDkJHVy
¿Cuando pasan el cobro de la tarjeta del Corte Inglés? tarjeta de descuento toks says:
código promocional de aliexpress cupon descuento
farmacia mapuche
ApprovedNets http://approvednets.com 10% DE DESCUENTO CÓDIGO
DE CUPÓN: ANET10
codigo descuento farmacia puerto banus código de descuento wish
DanielNulse says:
превосходный вебресурс https://vse-chasti-filmov.ru/344-utomlennye-solncem-vse-chasti.html
PabloTieve says:
bola tangkas online
Michaelwar says:
https://funfrom.me/category/woman/associate-female – что подарить мужчине, подарок девушке
vpn g says:
best free vpn windows 10
free web vpn
vpn meaning
BuyEssayOnline says:
Things to put in skill section of resume EssayPro
UYhjhgTDkJHVy
GilbertDen says:
Мы выбираем http://roleplay.ru/news/6437.html точно самые важные и самые интересные новости, ведь делать нескучный сайт о технике — это вытекает не только публиковать интересные новости, всетаки и не публиковать не интересные. Вы также можете подписаться на выше еженедельный дайджест и однажды в неделю получать послание с самыми интересными новостями прошедшей недели. Нынче ветвь hi tech дает нам много поводов для новостей, которые еще вчера казались фантастикой, а сейчас это уже не будущее, а наше настоящее — ведь иллюстрация не стоит чтобы месте и новые технологии появляются отдельный день.
BuyEssayOnline says:
Resume winning write EssayPro
UYhjhgTDkJHVy
Lokulnoums says:
снимки брюнеток https://devahy.biz
BuyEssayOnline says:
Sample thesis topic tourism http://roe.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://bestessayservicereview.com/
UYhjhgTDkJHVy
BuyEssayOnline says:
Dissertation methodology examplesample http://paetec.mobi/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
CadfsdsMut says:
https://vseapsny.ru/user/Fhiabawam/
JosephMer says:
카지노사이트제작
Jeffreytic says:
На складе боеприпасов под Карабашом продолжаются взрывы. Взрывы на складе боеприпасов на территории воинской части 96493 под Карабашом продолжаются. Последний был зафиксирован сегодня в 8 часов утра. Опасность взрывов сохраняется до сих пор, поско
donolpmm says:
tadalafil cost walmart tadalafil cost walmart
BuyEssayOnline says:
Summer season essay in english 100 words http://wesmarproducts.us/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
top rated vpn service v says:
opera vpn
vpn chrome extension free
best value vpn
HenryNok says:
fa8娛樂城
TommyHag says:
плитвицкие каскадные разбор астрологической индийский классический секс семья воланд прав мои малыши монтаж кбсм503б осень радует акварель градоначалниците од
CadfsdsMut says:
https://www.skk-pravo.ru/user/FhiabaraF/
Ckunqy says:
buy augmentin 625mg online – order augmentin 625mg for sale sulfamethoxazole drug
BuyEssayOnline says:
Persuasive essay on english as second language http://boojoo.mn/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
BuyEssayOnline says:
Ielts essay topics vocabulary http://www.pekids.com/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
PatrickPhill says:
roses Belarus
CadfsdsMut says:
http://dentex-tulun.ru/user/FhiabaPag/
PabloTieve says:
Tips Main Slot
PatrickUtten says:
modern furniture
cialis pills says:
tadalafil brands generic cialis tadalafil
BuyEssayOnline says:
Writing the essay or long composition http://click.communes.jp/?url=https://bestessayservicereview.com/
UYhjhgTDkJHVy
RepevacY says:
filmed godfather consul tucker
http://olimpic.kiev.ua/index.php?option=com_k2&view=itemlist&task=user&id=630934 price order in usa
claiming mule
PabloTieve says:
Blockchain
bibjose says:
bibjose abc6e5c29d https://coub.com/veverforsterp/stories
Jeromeped says:
hacker slot
Henryacady says:
Smenik Agency — это команда энтузиастов, работающих в сфере seo продвижения.Наши главные ценности — честность и открытость. Они прописаны в нашу собственную конституцию.
BuyEssayOnline says:
Top letter writers services online https://windsorhillsrent.com/cgi-bin/out.cgi?ses=I8dOACDFG5&id=1399&url=https://papershelps.org
UYhjhgTDkJHVy
bryahol says:
bryahol abc6e5c29d https://coub.com/whistporphenlworth/stories
Alenafuese says:
Несколько дней назад разглядывал материалы сети, и вдруг к своему восторгу увидел лучший вебсайт. Гляньте: https://qrcoder.org/ . Для нас данный вебсайт показался очень неплохим. Всего наилучшего!
Williamunfor says:
desert safari dubai
quynfoul says:
quynfoul abc6e5c29d https://coub.com/dysdowntoscli/stories
whats an essay g says:
literary analysis essay example
words to start an essay introduction
how to end an argumentative essay
apolwash says:
apolwash abc6e5c29d https://coub.com/clearathexvi/stories
BuyEssayOnline says:
How to write an analytical essay examples http://images.google.tt/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
PatrickUtten says:
Ethanol
tallyzb says:
tallyzb 9ef30a34bc https://coub.com/leodrippensi/stories
Reerduchspvf says:
https://cialisbusd.com/ cheap cialis pills for sale
BuyEssayOnline says:
Resident care aide resume http://www.sporza.tv/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
Reerduchhhzk says:
tadalafil order online no prescription cost tadalafil generic
Alinafuese says:
Ночью смотрел содержимое сети интернет, и вдруг к своему удивлению открыл интересный веб-сайт. Вот: https://qrcoder.org/ . Для моих близких данный веб-сайт явился весьма полезным. Всего доброго!
Jeromeped says:
Slot hacker online
PatrickUtten says:
Buy ASIC Miners Online
Jeromeped says:
Slot Hacker
BuyEssayOnline says:
Esl essays editing site for masters http://www.mejtoft.se/research/?page=redirect&link=https://papershelps.org
UYhjhgTDkJHVy
MichaelFient says:
Морозильники – необходимая доля нашего обихода. Однако, равно как также любая оборудование, заблаговременно либо запоздало вылезает с порядка. Иногда восстановление морозильников во СПб – данное только одно разрешение, с целью корректировки условия. Эксперты нашего обслуживания аккуратно также незамедлительно починят аппарат. Понимая все без исключения аспекты ремонтных работ также обладая требуемые запасные части, я сможем преподнести технической другую жизнедеятельность.
срочный ремонт холодильников
Priscillafuese says:
https://seocheck24.net/
weslgera says:
weslgera 7b17bfd26b https://seesaawiki.jp/tranlinkmorec/d/Crack%20Sismicad%2011%209%20Torrent%2032%20Windows%20Professional%20Activation
BuyEssayOnline says:
Professional thesis proposal writer services ca https://www.google.so/url?q=https://papershelps.org
UYhjhgTDkJHVy
RepevacY says:
bollocks congratulate disappointed greed
http://ft.unbari.ac.id/index.php/component/k2/itemlist/user/4967 where can i order astonin otc
beautiful practiced
shagav says:
shagav 7b17bfd26b https://wakelet.com/wake/sFB5L36kW_hihMXiEdnbn
RachelMoosy says:
https://seocheck24.net/
Startamazon says:
Бизнес на Amazon 2022. Amazon FBA 2022
https://youtu.be/kRW7e6W0JQ8
Бизнес на Amazon, это очень перспективное направление, которое не требует вложений. На видео показано прохождение верефикации на амазон в 2022 году.
amevign says:
amevign 7b17bfd26b https://seesaawiki.jp/lourscofilu/d/Roadside%20Romeo%20Movie%205%20720p
BuyEssayOnline says:
Resume cv format http://cokeccr.biz/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
niorbit says:
niorbit 7b17bfd26b https://coub.com/stories/3502281-better-oraby-s-illustrated-reviews-of-biochemistry-pdf
Jajhkv says:
real viagra pills – buy tadalafil 10mg generic cialis canada
best canada vpn b says:
best vpn 2018
unlimited free vpn
hotspot free vpn
taioph says:
taioph 7b17bfd26b https://wakelet.com/wake/mzHxsqvqZc4cIbf04xXPM
charaq says:
charaq 7b17bfd26b https://coub.com/stories/3255076-plant-physiology-taiz-and-zeiger-5th-edition-pdf-download-verified
Jeromeped says:
slot hacker 62
BuyEssayOnline says:
Effective writing tips https://xn--h1aifiiie.xn--p1ai/bitrix/rk.php?goto=https://papershelps.org
UYhjhgTDkJHVy
alerein says:
alerein 7b17bfd26b https://seesaawiki.jp/hernoeperni/d/Khiladi%20786%204%20Full%20Movie%20In%20Hindi%20Free%20Download%20Hd%20720p
sadoaus says:
sadoaus 7b17bfd26b https://coub.com/stories/3351571-wondershare-recoverit-8-1-2-3-crack-setup-freel-slavrayl
oldykarm says:
oldykarm 7b17bfd26b https://trello.com/c/TFPksizJ/55-microsoft-office-2010-professional-plus-crack-free-torrent-cpasbien
BuyEssayOnline says:
Help writing u.S. History and government dissertation chapter http://inu.or.tv/inu-search/rank.cgi?mode=link&id=283&url=https://papershelps.org
UYhjhgTDkJHVy
olefab says:
olefab 7b17bfd26b https://coub.com/stories/3242938-infinity-box-crack-taggretu
tasanta says:
tasanta 7b17bfd26b https://trello.com/c/5W50f47w/46-mercury-rev-deserters-songs-1998rar-geraval
BuyEssayOnline says:
Write a servlet that snoops the servers servlet http://papershelps.org.isdownorblocked.com/
UYhjhgTDkJHVy
holihal says:
holihal 7b17bfd26b https://trello.com/c/Main8fvU/21-verified-crack-sonible-smarteq2-v102-vst-vst3-aax-14122018-x64
holihal says:
holihal 7b17bfd26b https://trello.com/c/Main8fvU/21-verified-crack-sonible-smarteq2-v102-vst-vst3-aax-14122018-x64
egerbayl says:
egerbayl 7b17bfd26b https://coub.com/stories/3340262-mayfair-magazine-download-pdf-top
Tokulnoums says:
фотоснимки милочек https://devahy.com
igrazea says:
igrazea 7b17bfd26b https://seesaawiki.jp/thrifatlifab/d/Mongol%20The%20Rise%20Of%20Genghis%20Khan%20In%20Hindi%20Torrentgolkesgolkes
Valentina Vom says:
WEB специалисты помогите
Нужно сверстать сайт на Вордпресс или другой CMS. Есть примерная структура и старая версия сайта, нужно сделать хороший дизайн – отзовитесь пожалуйста
HenryNok says:
fa8
BuyEssayOnline says:
How to write a will in new york EssayPro
UYhjhgTDkJHVy
emmsci says:
emmsci 7b17bfd26b https://wakelet.com/wake/BqcNjZnHE5kte5Nbodphs
Ronnieawams says:
громпокер промокод – бетфаир промокод, промокод pokerstars
IgnacioRew says:
see post gas app upside
belhil says:
belhil 7b17bfd26b https://www.cloudschool.org/activities/ahFzfmNsb3Vkc2Nob29sLWFwcHI5CxIEVXNlchiAgMDA6Z3lCwwLEgZDb3Vyc2UYgIDA0ICpqAkMCxIIQWN0aXZpdHkYgIDAsOab6AgMogEQNTcyODg4NTg4Mjc0ODkyOA
panugol says:
panugol 7b17bfd26b https://coub.com/stories/3430454-palo-alto-vm-100-download-trial-full
Mariowoowl says:
read review getupside promo code reddit
BuyEssayOnline says:
Popular literature review ghostwriting sites for college http://itsasmallworld.net/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
what are critical thinking skills a says:
critical thinking ability
simple definition of critical thinking
critical thinking articles
AlbertWonge says:
контур экстерн черновики – личный кабинет контур офд, контур укэп
mollwin says:
mollwin 7b17bfd26b https://seesaawiki.jp/onviljeusi/d/Zplanevielklanginstantharmonyv2%20%2erar%20Key%20Utorrent%202021%20Cracked
Robertrar says:
Пуш трафик – Тизерные сети, Контекстная реклама
herdwayl says:
herdwayl 7b17bfd26b https://wakelet.com/wake/BaT8IF2Am_Wlpc4nZtqVq
ScottieUrilm says:
kontur api – контур персонал, контур бухгалетрия
Dennisswife says:
Финансовые партнерки – Цпа партнерки, Адалт партнерки
BrandonTib says:
Купите права на управление катком через лучшего оформителя документов on-prava, с нами у вас не будет проблем в сдачи экзаменов или получении документов из обучающего центра. Все оформление будет занимать не более 4 дней, по готовности предлагаем возможность проверки документа через базу гостехнадзора. Официальные права на каток только в on-prava.
http://forum.smela.com.ua/viewtopic.php?f=83&t=6076
hellian says:
hellian 7b17bfd26b https://wakelet.com/wake/488bVwUfV0NM3rPs5GiQn
BuyEssayOnline says:
Professional blog writers sites uk http://darsil.ru/bitrix/rk.php?goto=https://bestessayservicereview.com/
UYhjhgTDkJHVy
Martinaporb says:
Students! Get your big project done for you! Enjoy the lowest prices. Available for all grades and levels including higher eduction.
https://bit.ly/3Lo1KPx
nieltaj says:
nieltaj 7b17bfd26b https://coub.com/stories/3115026-verified-smartplant-license-manager-keygen-download
CharlesTug says:
https://www.transtats.bts.gov/exit.asp?url=https://spb-vinil.ru/
nekeigna says:
nekeigna 7b17bfd26b https://wakelet.com/wake/hTsfhM4p2xhsIHvQtYlSC
BuyEssayOnline says:
Custom literature review editing service for mba http://www.cheaptelescopes.co.uk/go.php?url=https://papershelps.org
UYhjhgTDkJHVy
ornojam says:
ornojam 7b17bfd26b https://www.cloudschool.org/activities/ahFzfmNsb3Vkc2Nob29sLWFwcHI5CxIEVXNlchiAgMCA363sCQwLEgZDb3Vyc2UYgIDAwOXknQkMCxIIQWN0aXZpdHkYgIDAkKqgjQkMogEQNTcyODg4NTg4Mjc0ODkyOA
carmcomp says:
carmcomp 7b17bfd26b https://coub.com/stories/3518088-firmware-gps-apontador-t430-20
CharlesTug says:
https://userscloud.com/np36vuvl9uto
loutcris says:
loutcris 7b17bfd26b https://trello.com/c/btfAuTw1/34-crossfire-fast-knife-hack-free-13-daranch
BuyEssayOnline says:
Spanish homework lessons http://arclightdocs.com/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
karfind says:
karfind 7b17bfd26b https://wakelet.com/wake/TmnWHF8_mnCeBXm9A5yyL
penreat says:
penreat 7b17bfd26b https://wakelet.com/wake/9CBHHsye3JXqmtKGBSDEK
CharlesTug says:
http://www.eduvision.edu.pk/counseling/index.php?qa=user&qa_1=parentharp4
BuyEssayOnline says:
Custom speech writer site for college http://danielkfreeman.com/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
ArthurDooro says:
Hi,
amicable to upon you! Let me advance myselft
58 year-old Real Estate Representative Rodrick Mosby from Chatsworth, has pastimes which include papermaking, and poker. Maintains a travel blog and has heaps to write about after visiting Historic Area of Willemstad
http://petinsurancevzfh465.yousher.com/10-insurance-plan-firms-featuring-pet-insurance-plan-in-2022
Gabrielvek says:
Не время умирать – Социальная сеть, Человек-паук: Вдали от дома
saffqui says:
saffqui 7b17bfd26b https://trello.com/c/Dzk76ST4/12-dc-unlocker-2-client-exclusive-free-username-and-passwordrar
avast secureline vpn review h says:
free vpn google chrome
free avast vpn license key
express vpn free windows
JamesEreft says:
ладный вебсайт томск электрик
Michaelvet says:
Здравствуйте
Смотрите, увидел полезный ресурс о ремонте и обслуживании техники и пр
Вот ссылка inetrfax.ru
Davidruini says:
Почти семнадцать – Трудные подростки, Сериалы
CharlesTug says:
https://www.4shared.com/office/8z_4y6xWea/%D0%BF%D0%B5%D1%87%D0%B0%D1%82%D1%8C_%D0%BF%D0%BB%D0%B0%D0%BA%D0%B0%D1%82%D0%BE%D0%B2_%D0%BD%D0%B0_%D0%B7%D0%B0%D0%BA%D0%B0%D0%B7_ywnbp.html
BuyEssayOnline says:
Help me write english as second language papers http://www.younglabs.com/__media__/js/netsoltrademark.php?d=papershelps.org
UYhjhgTDkJHVy
varihil says:
varihil 7b17bfd26b https://wakelet.com/wake/lKBc-76kJCA6ZcDLMOzXx
KeithRem says:
первоклассный вебресурс томск электрик
zimepro says:
zimepro 7b17bfd26b https://www.cloudschool.org/activities/ahFzfmNsb3Vkc2Nob29sLWFwcHI5CxIEVXNlchiAgMCAsoT9CQwLEgZDb3Vyc2UYgIDAwICUhgoMCxIIQWN0aXZpdHkYgIDAkJv8yAsMogEQNTcyODg4NTg4Mjc0ODkyOA
Kennypix says:
Всегда Без Исключения ММГ производятся в базе военных стандартов. Во систему макетов орудия записываются перемены с целью избежания вероятности «убойного» выстрела. Данную службу выполняют специалисты, однако казаться не «кустарные мастера», по этой причине в часть числе и требовательный собиратель казаться не отыщет отпечатков вмешательства.
mmg-shop.ru
ferlau says:
ferlau 7b17bfd26b https://coub.com/stories/3285489-top-gravity-wars-full-crack-torrent
PabloTieve says:
dermal-fillers-near-me/profhilo/
CharlesTug says:
https://lawyerdrawer4.gumroad.com/p/dcd91265-be8f-46f7-a492-c0cd8ba795f9
BuyEssayOnline says:
Success criteria for essay writing https://kombi-nation.co.uk/execs/trackit.php?user=guest_IuSyD&page=https://papershelps.org
UYhjhgTDkJHVy
kladay says:
kladay 7b17bfd26b https://seesaawiki.jp/promisseysand/d/%27LINK%27%20Torrent%20Velamal%20Sex%20S%20Riers%20In%20Ebook%20Rar%20Full%20Version%20%5bpdf%5d
jamegol says:
jamegol 7b17bfd26b https://wakelet.com/wake/hByyS-Eb8BFRPxvPPMfp6
https://eyelash-conditioner-ranking.com/ says:
It is actually a great and helpful piece of info. I am happy
that you simply shared this helpful info with us. Please keep us informed like
this. Thanks for sharing. https://eyelash-conditioner-ranking.com/
CharlesTug says:
https://list.ly/hesselbergdaniels950
janabeth says:
janabeth 7b17bfd26b https://wakelet.com/wake/Z0vO1Tk3ZFE4Zu4whDio0
PabloTieve says:
mesotherapy-near-me/restylane-mesotherapy/
BuyEssayOnline says:
Best dissertation conclusion editing for hire au https://wakame1367.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https%3A%2F%2Fpapershelps.org
UYhjhgTDkJHVy
giactal says:
giactal 7b17bfd26b https://coub.com/stories/3128968-vancouver-2010-pc-game-crack-site-whypal
heajawa says:
heajawa 7b17bfd26b https://wakelet.com/wake/wbHVdH6SHy9-WmEfj9GNv
PatrickUtten says:
ciscenje jetre iskustva
PabloTieve says:
buy-botox/dysport/
morrcorw says:
morrcorw 7b17bfd26b https://coub.com/stories/2998718-adobe-flash-cs4-portable-download-free-exclusive
BuyEssayOnline says:
Resume production director http://google.sk/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Williamunfor says:
https://vpereslavle.ru/bitrix/redirect.php?event1=catalog_out&event2=eroplus.info/&goto=https://tour-dubai.com
international vpn service r says:
vpn for firestick free
vpn mac free
buy us vpn
shaanne says:
shaanne 7b17bfd26b https://wakelet.com/wake/NvYzS-afkFnghMi25LWCM
AffnyTub says:
Права на автогрейдер без хлопот купить предложит on-prava, с нами у вас не будет проблем с очередями и получением прав на автогрейдер. Документ будет оформлен в кратчайший срок по лучшей цене на рынке. Оформляйте права на автогрейдер с on-prava и получите качественный сервис уже сегодня.
http://31pokupki.rx22.ru/viewtopic.php?f=47&t=11993
harwya says:
harwya 7b17bfd26b https://www.cloudschool.org/activities/ahFzfmNsb3Vkc2Nob29sLWFwcHI5CxIEVXNlchiAgID_-e6FCQwLEgZDb3Vyc2UYgIDAwIDZqQgMCxIIQWN0aXZpdHkYgIDA0O7npAoMogEQNTcyODg4NTg4Mjc0ODkyOA
BuyEssayOnline says:
Book report vs abstract https://google.ge/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
laujahv says:
laujahv 7b17bfd26b https://coub.com/stories/3426257-two-kids-one-sandbox-original-video-zip-work
PabloTieve says:
buy-botox/dysport/
Williamunfor says:
car seat repair dubai
amaltan says:
amaltan 7b17bfd26b https://seesaawiki.jp/tersbobsberlosc/d/Ek%20Omkar%20Satnam%20Full%20Song%20Download
GilbertFlope says:
https://www.youtube.com/watch?v=oJcirBDHUxI
HenryNok says:
yacht sales turkey
dahydarr says:
dahydarr 7b17bfd26b https://coub.com/stories/3210242-tron-legacy-in-hindi-dubbed-720p-hugyemi
BuyEssayOnline says:
Content writers sites gb http://cr.naver.com/redirect-notification?u=https%3A%2F%2Fwww.essaypro.me
UYhjhgTDkJHVy
ArmandoJoype says:
тут об этом – нарколог на дом круглосуточно, лечение алкоголизма клиника
lauranc says:
lauranc 7b17bfd26b https://seesaawiki.jp/ntuphighlito/d/Ek%20Pyaar%20Aisa%20Bhi%20Movie%20Hindi%20Dubbed%20Download
MichaelVok says:
[url=https://coronavirus-control.ru/varianty-lecheniya-alkogolnoj-zavisimosti/]лечение наркоманов казань[/url] – тут про это, вылечиться от алкоголизма
burtgabr says:
burtgabr 7b17bfd26b https://coub.com/stories/3421902-full-hd-1080p-movies-bluray-hindi-khoobsurat-khiladi-steelly
nancolim says:
nancolim 7b17bfd26b https://joysicodta.game-info.wiki/d/HD%20Online%20Player%20%28Ta%20Chovendo%20Hamburguer%201080p%20Dublado%29
BuyEssayOnline says:
Business research proposal titles https://www.google.at/url?q=https://papershelps.org
UYhjhgTDkJHVy
fritandr says:
fritandr 7b17bfd26b https://coub.com/stories/3395404-fishing-barents-sea-king-crab-update-v1-3-4-3406-valcar
PatrickUtten says:
liver protect u apotekama
roszon says:
roszon 7b17bfd26b https://trello.com/c/3UbdCJDS/67-link-prince-of-egypt-720p-mkv-13
RalphTog says:
лечение наркомании – вывод из запоя на дому круглосуточно, лечение игромании в казани
PatrickUtten says:
water treatment company in dubai
Williamunfor says:
industrial automation company in dubai
Davidtum says:
лечение наркомании – вывод из запоя, клиника лечения наркозависимых
bertcho says:
bertcho 7b17bfd26b https://wakelet.com/wake/erSvawpbAIrQ2AZ6VOKQC
Williamson says:
japanese rape sex – asian bbw sex, asian cum
BuyEssayOnline says:
Popular letter writing website EssayPro
UYhjhgTDkJHVy
HenryNok says:
yacht refit turkey
http://metode-de-marirea-penisului-ro.eu/beastgel.html says:
Hi there! I’m at work surfing around your blog from my new
iphone 3gs! Just wanted to say I love reading through your
blog and look forward to all your posts!
Keep up the fantastic work! http://metode-de-marirea-penisului-ro.eu/beastgel.html
Davidshity says:
Рабочие средства для повышения потенции, продления полового акта
разнообразия интимной жизни вы можете найти тут:
pharm-shop.com.ua/product/tadalis-sx/
marpedr says:
marpedr 7b17bfd26b https://trello.com/c/zPXqscWB/62-prem-ratan-dhan-payo-2015-telugu-movie-720p-nicdwe
norton vpn review z says:
vpn buy online
globus free vpn
best vpn for 2017
JamisonIrova says:
온라인카지노
HddryEcowl says:
Устали искать что посмотреть вечером? Мы собрали лучшие коллекции фильмов и сериалов на любой вкус. Большую часть можно смотреть онлайн и бесплатно
https://www.ixbt.com/live/profile/252429/
klahar says:
klahar 7b17bfd26b https://wakelet.com/wake/3CDacQ1WCVUPSbJJAZtX1
CarlosHaunc says:
chinese anal sex video – asian amatuer porn, asiam porm
shagerm says:
shagerm 7b17bfd26b https://trello.com/c/5FzIvlew/47-matkin-uplne-najviac-ebook-download-gibtas
BuyEssayOnline says:
Resume for shoe sales https://google.com.ec/url?q=https://buyessayreviews.com
UYhjhgTDkJHVy
RogerNob says:
온라인카지노
Ralphskalk says:
methandienone – testosterone cypionate, trenbolone acetate
bernkry says:
bernkry 7b17bfd26b https://wakelet.com/wake/Vo4g6IG7E2OaKZI1emYtP
Davidcah says:
buy vpn router
firestick vpn free
best free vpn mac
Richardcurdy says:
drostanolone enanthate – human chorionic gonadotropin buy online, buy hcg peptide
jaytal says:
jaytal 7b17bfd26b https://montersheni.chronicle.wiki/d/Daemon%20Tools%20Pro%204%2e41%20Serial%20Key%20Download
PatrickUtten says:
dubai desert safari
quilou says:
quilou 7b17bfd26b https://coub.com/stories/3429738-magix-photostory-easy-2-0-1-54-crack-cracksnow-keygen-top
BuyEssayOnline says:
Tobias funke resume http://honyaku.j-server.com/LUCOTBOX/ns/warning_mess3.cgi?url=https://papershelps.org
UYhjhgTDkJHVy
PatrickUtten says:
car seat repair dubai
carmary says:
carmary 7b17bfd26b https://trello.com/c/Hexo18WA/64-portable-ulead-cool-3d-35rar-makkim
Reerduchvkee says:
tadalafil price walmart buy tadalafil
chryfrod says:
chryfrod 7b17bfd26b https://trello.com/c/DUhewHAU/57-download-volare-pini-orcamento-crack-verified
JamisonIrova says:
카지노사이트
ngaijayk says:
ngaijayk 7b17bfd26b https://wakelet.com/wake/XtKhF34w7YcyUbn4apyVf
BuyEssayOnline says:
Math homework help for algebra 1 http://library.sust.edu/cgi-bin/koha/tracklinks.pl?uri=https://papershelps.org
UYhjhgTDkJHVy
imeleliz says:
imeleliz 7b17bfd26b https://coub.com/stories/3079348-nintendo-ds-serial-number-check-beltchar
jamgems says:
jamgems 7b17bfd26b https://wakelet.com/wake/0HgSM6BI3D4x0ubdCosI9
PatrickUtten says:
https://hsedubai.com
berrhar says:
berrhar 7b17bfd26b https://coub.com/stories/3135417-vidblaster-2-18-portable-work
vanvala says:
vanvala 7b17bfd26b https://wakelet.com/wake/Wa3BYj6qiqGqQ7_Y3fNHh
Kennethked says:
More detailed: https://xxxconent.biz/go/my3tgzrvmq5dkojugy
BuyEssayOnline says:
White space resume https://60f04f9ac7a770001685395f.tracker-asia.adotmob.com/pixel/visite?d=5000&r=https%3A%2F%2Fpapershelps.org
UYhjhgTDkJHVy
Williamunfor says:
http://www.westbloomfieldlibrary.org/includes/statistics.php?StatType=Link&StatID=Facebook&weblink=https://levantautocare.com
Lnykqa says:
cheap plaquenil 400mg – purchase hydroxychloroquine sale buy plaquenil 400mg generic
jaidlav says:
jaidlav 7b17bfd26b https://trello.com/c/nLcDEvYk/59-bus-simulator-2012-english-patch-124-hot
nenealee says:
nenealee 7b17bfd26b https://wakelet.com/wake/FJ2ZOaZ1Q0nuMjpz7ScrC
darslyzb says:
darslyzb 7b17bfd26b https://trello.com/c/3mdrjNj2/29-whereis-v20-toyota-australia-nz-2014
free vpn chrome extension p says:
best vpn service
business vpn provider
download vpn for pc
latiubo says:
latiubo 7b17bfd26b https://wakelet.com/wake/RMydoyM8mCD6IJR7ubLPc
BuyEssayOnline says:
Annotated bibliography ghostwriter for hire online https://images.google.com.sa/url?q=https://bestessayservicereview.com
UYhjhgTDkJHVy
Williffmdug says:
https://relrus.ru/user/Remontmskstile/
crikhr says:
crikhr 7b17bfd26b https://wakelet.com/wake/ocA_DSrdx7eBN5AJcBU5f
JanisGab says:
Laba diena!
Draugai, jus zino, Bendrove Kilikija, UAB yra filialas i Silute?
Aciu labai!
PatrickUtten says:
https://levantautocare.com
ritctomm says:
ritctomm 7b17bfd26b https://wakelet.com/wake/xI638v4cJb37l_JmDcxPb
JaimeEmpix says:
Заказать бады ради мужчин для повышения либидо и потенции, китайская медицина.
Женские возбудители и афродизиаки. Однако дозволено Обещать тогда :
fito-shop.in.ua
ximgius says:
ximgius 7b17bfd26b https://wakelet.com/wake/rwL4OssXFwwrE97sfToLY
PatrickUtten says:
Crypto Exchanger
gautama says:
gautama 7b17bfd26b https://trello.com/c/qIOrkAdE/75-free-download-adobe-dreamweaver-cs3-full-version-crack-top
BuyEssayOnline says:
Job search engines free resume posting http://blog.alreego.com/go.php?link=https://buyessayreviews.com/essaypro-com/
UYhjhgTDkJHVy
http://codziennaporcjainformacji.info/2021/06/04/czym-sa-przewierty-horyzontalne/ says:
You’ve got one of the greatest internet sites.
http://codziennaporcjainformacji.info/2021/06/04/czym-sa-przewierty-horyzontalne/
PatrickPhill says:
NFT marketplace
birdglen says:
birdglen 7b17bfd26b https://wakelet.com/wake/WHR_BEqLfuLERuBfh8w21
ilever says:
ilever 7b17bfd26b https://trello.com/c/n5p5rqGl/55-kalyug-movie-download-720p-videos-upd
BuyEssayOnline says:
Custom dissertation results editing service for university http://gbs.realwap.net/redirect.php?id=119&url=https://papershelps.org
UYhjhgTDkJHVy
PatrickUtten says:
ghcoins exchanger
BuyEssayOnline says:
Forms for a resume http://images.google.mw/url?q=https://buyessayreviews.com
UYhjhgTDkJHVy
CharlesAdoma says:
https://www.time-samara.ru/content/view/604880/ispolzuem-stroitelnye-lesa-pravilno
PatrickUtten says:
亞博體育
http://iclub.edu.pl/ says:
I like browsing your web site. Appreciate it!
http://iclub.edu.pl/
Ernuvi says:
purchase stromectol online – ivermectin coronavirus stromectol in canada
BuyEssayOnline says:
Computer science research papers download http://magmus-it.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://buyessayreviews.com/
UYhjhgTDkJHVy
PatrickPhill says:
Metaverse
essay about myself b says:
exploratory essay
argumentative essay transition words
essay introduction examples
RogerNob says:
Bitcoin trader in India
GruvikRex says:
Labas. Pagarbiai patariu Mazoji bendrija Transvena, MB miesto, kuriame yra atstovybe Plunge?
Aciu uz demesi!
acklmer says:
acklmer 7b17bfd26b https://wakelet.com/wake/zzmFrK-96QMdS4hnUXD29
BuyEssayOnline says:
Popular resume ghostwriter website online http://namwon0924.kr/board_ePiF76/2945648
http://rozmowywkuluarach.pl/oswietlenie-lazienkowe-o-czym-nie-mozna-zapomniec/ says:
thnx for sharing this great webpage.
http://rozmowywkuluarach.pl/oswietlenie-lazienkowe-o-czym-nie-mozna-zapomniec/
buy meds usa says:
Refer to the Home Hub allows you to watch live and on-demand TV from a
number of options all Boch group if both companies
are responsible for your personal data or buy meds usa
BuyEssayOnline says:
Example dissertation objectives http://www.nexto.pl/rf/pg?pid=576&url=https://papershelps.org
TebertFlies says:
Unmarried girls are ready to meet close to you and ready for sex https://hot-ladies-here.com/?u=wh5kd06&o=qxpp80k
BuyEssayOnline says:
Comparative law essays http://bon-vivant.net/url?q=https://buyessayreviews.com/essaytyper-com-review/
Reerduchpnqo says:
cialis tadalafil best price usa tadalafil
Freddieger says:
Быть выходе номерных символов с порядка, их утрате либо краже большая часть шоферов направляется во муниципальные аппараты с целью переоформления. Однако фирма «Бегущий слона» дает наиболее обычный наружность постановления трудности. Производим дубликаты гос номеров Минска в целом из-за 5 мин..
Подробнее: https://dublikat26.ru/products/belorussiya
Jaimetinee says:
Данное образец обслуживания, посредством что возможно составить непосредственно во ватсап каждого контакта в отсутствии прибавления его во телефонную книжку.
написать в ватсап без добавления номера
BuyEssayOnline says:
Research paper experts https://www.google.co.il/url?q=https://buyessayreviews.com
Htipjd says:
buy generic cephalexin – order cleocin online purchase erythromycin for sale
BuyEssayOnline says:
General essays french https://isgar.org/2022/02/14/how-to-make-a-cursive/
ThomasGlope says:
Нашел великолепный сервис по ремонту бытовой техники. Детально в источнике
RepevacY says:
miners curtis terrorism
https://cadjulivi.com/index.php?option=com_k2&view=itemlist&task=user&id=87292 money order fluoxetine california
daddy tie backs
BuyEssayOnline says:
Cover letter for leadership conference http://www.funny-games.ws/myspace.php?url=https://buyessayreviews.com/essaypro-com/
DavidWousy says:
link Free sex
http://dziejesietuiteraz.pl/jak-wybrac-dobre-wina/ says:
Great internet site! It looks really professional!
Maintain the good work!
http://dziejesietuiteraz.pl/jak-wybrac-dobre-wina/
Arthurgar says:
try these out Free sex
Reerduchbwcs says:
https://cialisvet.com/ generic cialis online fast shipping
cialis 20mg says:
cost of cialis tadalafil dosage
BuyEssayOnline says:
Essay about your future job http://boundtoserve.com/__media__/js/netsoltrademark.php?d=papershelps.org
Paulalox says:
Тут вам простой также быстро сумеете находить необходимую для вас mp3 музыку, выслушивать интернет песенки бесплатно также формировать плейлисты в отсутствии регистрации Наиболее свежайшие mp3 новшества 2022 годы. Загрузить новейшие бестселлеры….
Больше информации по ссылке: z1fm слушать
Edwardundib says:
Lev casino промокод – Эльдорадо казино промокод, Play Fortuna промокод
BuyEssayOnline says:
Research paper technology good bad EssayPro
RickeyHorma says:
Pin Up промокод – Booi бонус код, Джой казино бонус код
RichardTum says:
Booi промокод – 1Вин промокод, Пин Ап промокод
XavierViaps says:
Clubnika casino промокод – Riobet промокод, Казино Клубника промокод
BuyEssayOnline says:
84 v essay full auth3 filmbay yniii nw html http://syndicat.su/bitrix/redirect.php?event1=&event2=&event3=&goto=https://buyessayreviews.com/essaypro-com/
Anthonytax says:
Промокод Делюкс Казино – Cat казино промокод, Play Fortuna промокод
CarlosFom says:
Jozz casino промокод – Clubnika casino промокод, Bet365 бонус код
Williamunfor says:
http://analyze.3eo.ir/redirect.php?url=https://hsedubai.com
BuyEssayOnline says:
Resume format for procurement job https://www.bankofannarbor.com/speedbump.aspx?URL=https://papershelps.org
RogerNob says:
Website backlinks SEO
Dennisguack says:
backlink service
PabloTieve says:
backlink service
Jlchrl says:
fildena 100mg without prescription – buy antabuse 500mg without prescription order disulfiram 500mg pill
Dennisguack says:
berita terkini
cyndeca says:
cyndeca bcbef96d84 https://trello.com/c/u2FHcUK9/59-aliens-vs-preda-2k-mp4-hd-dubbed
BuyEssayOnline says:
Esl critical thinking writers for hire for college https://maps.google.com.co/url?q=https://buyessayreviews.com/essaytyper-com-review/
Oscarshesk says:
На FL.ru можно найти лучших фриланс специалистов среди 3 млн зарегистрированных исполнителей.
Программисты, дизайнеры, художники, копирайтеры, юристы, бухгалтеры, инженеры, фотографы – тысячи удаленных сотрудников по любым freelance специализациям.
Легко выбрать нужного исполнителя по рейтингу, портфолио и отзывам. А так же можно найти удаленного сотрудника или организовать конкурс исполнителей.
На сайте ежедневно размещается свыше 1500 фриланс проектов, конкурсов и вакансий с поиском исполнителей. FL.ru идеально подойдет для тех, кто ищет как временный заработок, так и постоянную работу.
https://jomkerja.my/author/bibbycatybje/ says:
Extremely user friendly website. Enormous info available on few gos to.
https://jomkerja.my/author/bibbycatybje/
Larrysor says:
прокат авто доминикана – пунта кана аренда авто, аренда машин доминикана
Patricknig says:
гидра официальный сайт – гидра тор, гидра
felelo says:
felelo ec2f99d4de https://trello.com/c/cfKAwv8w/65-tutak-tutak-tutiya-full-subtitles-movies-watch-online-watch-online-bluray
Winstonrow says:
301 Moved Permanently https://www.iva-drp.com/ – 301 Moved Permanently…
RandyRilla says:
аренда авто в доминикане – аренда авто в баваро, прокат машины в баваро
BuyEssayOnline says:
Sample essay about yourself examples https://themonitors.net/goto.php?url=https://papershelps.org
bertim says:
bertim ec2f99d4de https://coub.com/stories/4003183-revit-2013-portugues-dubbed-film-720p-2k-subtitles
brinor says:
brinor ec2f99d4de https://wakelet.com/wake/6FwoU3zEjxhm1n5FhpiOa
sakiver says:
sakiver ec2f99d4de https://trello.com/c/ROVe3xfd/48-fo-s-hombres-nulled-latest-rar-pc-full-version
BuyEssayOnline says:
Como escribir un resume para trabajo http://news-search.toshiba.co.jp/bizsearch_asp/link?corpId=atc130025&q=Hong+Kong&thumbnail=images/thumbnail/atc130025/5492ebb4be0bffafd2d1ad0eddeac8b4.jpg&title=Toshiba+Names+Ali+Az%E2%80%A6&type=s&url=https://papershelps.org
derrbelv says:
derrbelv ec2f99d4de https://coub.com/stories/3949643-the-m-dual-torrents-mp4-kickass-dvdrip
Dennisguack says:
카지노사이트제작
Patricknig says:
hydra регистрация – hydra регистрация, hydraruzxpnew4af onion
http://pristavka.com/bitrix/redirect.php?goto=https://webdesigningdubai.ae/blog/webdesign/web-hosting-setting-for-etisalat.html says:
Good day! Do you know if they make any plugins to
assist with Search Engine Optimization? I’m trying to get my blog to rank for some targeted
keywords but I’m not seeing very good success. If you know of any please share.
Many thanks! http://pristavka.com/bitrix/redirect.php?goto=https://webdesigningdubai.ae/blog/webdesign/web-hosting-setting-for-etisalat.html
BuyEssayOnline says:
Help writing custom persuasive essay on founding fathers http://demir.tc/__media__/js/netsoltrademark.php?d=papershelps.org
Dennisguack says:
линкбилдинг
Terryknivy says:
온라인카지노
доставка алкоголя якутск says:
I like the valuable info you provide in your articles.
I will bookmark your blog and check again here frequently.
I’m quite certain I’ll learn many new stuff right here! Good luck for the next!
Here is my web page – доставка алкоголя якутск
Dennisguack says:
온라인카지노
BuyEssayOnline says:
Top dissertation proposal writers site gb EssayPro
RogerNob says:
Backlinks SEO Google
Jasontriaw says:
монтаж отопления прайс
Dennisguack says:
получить обратные ссылки
so eine Option says:
Sie vererben verlieren den enormen den gro?ten Teil der befreiten Bonusse vor Konferenz die Wettanforderungen. Aber wenn Sie glucklich genug sind, um Geld, wird die Belohnung vorbei, dann erfahren, bewusst der MEISTEN UMGEWANDELTEN WERT-Regel zu sein. Coextensive with Wenn Sie mit einem Wert von Belohnung von mehr als 500 $ beenden, haben Sie zum gro?ten Teil darf nicht mehr als $50-$100 ablehnen.
Eine weitere Befehl ist der erlaubte Einsatz von Limit. Wenn das Casino den extremsten Einsatz beim Spielen mit einem Bonus festlegt, mussen nicht ubertreffen. Wenn nicht, das Casino Willenskraft einbeziehen und eine Bitte zu Kehrgut um dich auszahlen auszahlen zu lassen. Und die Mehrheit der Casinos in der letzten Analyse wunscht vorteil diese Ausrede. Seien Sie bewusst, dass diese Regelung nicht uber das Casino – Organisation durchgesetzt wird, so ist es Es liegt an Ihnen, die Geschaftsbedingungen von Extra sorgfaltig zu uberfliegen.
wie lange haben am 24.12 die geschafte geoffnet
Die letzte Regel, die nicht spater als von einigen Casinos angewendet wird, ist, dass Sie zu Stress haben werden gedeihen eine beiseite legen vor sinnlos einlosen Ihr kein Plunk down Bonus. Ich denke dass Casinos dies als eine weitere Manifestation der Verifizierung verwenden. Aber seien Sie wachsam, denn manche Casinos zu stechen, um Sie zu auszutricksen und Energie Sie mit dieser “Verifizierung Alluvium” zu Behandlung. In jedem Fall Quiz auf kraftig gabfest, um machen unerschutterlich Sie kennen Sie sich mit den Geschaftsbedingungen richtig – und befreien Sie das Gesprach.
JessicaRag says:
силла доставка
BuyEssayOnline says:
Pediatric cover letter https://maps.google.sk/url?q=https://bestessayservicereview.com
PatrickUtten says:
Alugar backbus
Mufnvi says:
order budesonide online – order budesonide generic generic ceftin 250mg
Dennisguack says:
обратные ссылки для SEO
https://jobplace24.com/author/mimikohlqy/ says:
Many thanks, this site is really helpful.
https://jobplace24.com/author/mimikohlqy/
Jasontriaw says:
монтаж отопление водоснабжения вентиляции
Liste says:
Sie auf verschlimmert den enormen Mehrheit der befreiten Bonusse im Voraus Meeting die Wettanforderungen. Aber wenn Sie glucklich viel sind, um rutschen, wird die zusatzlich beendet , dann erfahren, im Wissen der MAXIMUM UMGEWANDELTEN WERT-Regel zu sein. Steady Wenn Sie mit einem Wert von Zuwendungen von mehr als 500 $ bewirken, haben Sie zum gro?ten Teil darf nicht mehr als $50-$100 ablehnen.
Eine weitere Befehl von ist der erlaubte Einsatz von Peak. Wenn das Casino den extremsten Punt beim Spielen mit einem Bonus festlegt, verpflichtet nicht ubertreffen. Ansonsten, das Casino Engagement haben und eine Unachtsamkeit zu Detritus um dich erstatten auszahlen zu lassen. Und die Mannschaft der Casinos eigentlich zweck missbrauchen diese Ausrede. Seien Sie hip, dass diese Regelung nicht durch das Casino – Gruppe durchgesetzt wird, so ist es Es liegt an Ihnen, die Geschaftsbedingungen von Bonus sorgfaltig zu uberfliegen.
wie mussen sie sich bei diesem verkehrszeichen verhalten fu?gangerzone
Die letzte Uberwachung, die in der Nahe von einigen Casinos angewendet wird, ist, dass Sie zu Stress haben werden machen eine ubergeben fruher als unmodisch einlosen Ihr kein place Bonus. Ich traume dass Casinos dies als eine weitere Form der Verifizierung nutzen. Aber seien Sie vorsichtig, denn manche Casinos zu stechen, um Sie zu betrugen und Energie Sie mit dieser “Verifizierung Anzahlung” zu mitmachen. Ausnahmslos fragen auf flammend rap, um verursachen sicher Sie akzeptieren den Geschaftsbedingungen nett – und kratzen Sie das Gesprach.
Jacobtak says:
добродетельный ресурс https://mission32.ru/ – хирургия, протезирование
BuyEssayOnline says:
Free view resume job http://asylornek.kz/go?url=https://buyessayreviews.com/
ArthurReelp says:
buy Movfor with codeine syrup
buy Molnupiravir codeine syrup
zof says:
Follow the link and choose the products for your health
https://bit.ly/3oZOKnO
PabloTieve says:
Backlinks SEO Google
ArthurReelp says:
where can i buy Molnupiravir
buy Molnupiravir cream
Jasontriaw says:
отопление монтаж услуги
Jacobtak says:
добрососедский веб ресурс https://mission32.ru/ – Миссия32, удаление зубов
ArthurReelp says:
[url=https://molnupiravir.site/]can you buy Movfor over the counter in australia[/url]
order Molnupiravir
RobertGoony says:
Поможем перевезти кошку, собаку по России
Доверив перевозку животного в другой город, вы получите:
???????? Индивидуальную цену
? Кормление в пути
? Страхование
? Доставку от адреса до адреса
Наша команда стремится упростить процесс перевозки домашних животных по России – востребованной услуги среди владельцев домашних любимцев.
Бесплатный звонок по России
тел.8 (800) 350-70-16
перейти на сайт
IsacSause says:
This variant does not approach me.
dfgdlfg2131.32
https://howytooutoknowcgfdf.org/map.php
http://petervanwanrooyzonwering.nl/component/k2/item/31?gt;steps= says:
Write more, thats all I have to say. Literally, it seems as though you
relied on the video to make your point. You clearly know what youre talking about, why
throw away your intelligence on just posting videos to your weblog when you could be giving us
something enlightening to read? http://petervanwanrooyzonwering.nl/component/k2/item/31?gt;steps=
BuyEssayOnline says:
How to write a letter to say sorry https://www.google.al/url?q=https://buyessayreviews.com
ArthurReelp says:
can you buy Molnupiravir in the uk
where can i buy Molnupiravir 200mg
Dennisguack says:
backlinks for Google
PatrickUtten says:
denny darko
ArthurReelp says:
cheap Molnupiravir tablets
where to buy Movfor tablets
PabloTieve says:
backlink service
BuyEssayOnline says:
College apply essay http://teploenergodar.ru/redirect.php?url=https://buyessayreviews.com/essaytyper-com-review/
ArthurReelp says:
buy Molnupiravir tablets online
can you buy Molnupiravir over the counter
Antoniomor says:
http://kupit-shcheben-moskva.ru/
https://penis-verlangern-de.eu/Elongattor.html says:
My brother recommended I might like this web site.
He was once entirely right. This put up actually made my day.
You cann’t imagine simply how a lot time I had spent for this information! Thank you!
https://penis-verlangern-de.eu/Elongattor.html
Davidhar says:
crypto loan no collateral – cryptocurrency bitcoins, cryptocurrency loan
generic cialis says:
tadalafil without a doctor prescription tadalafil side effects
Stanleymoupt says:
crypto com – cryptocurrency, crypto com
Dennisguack says:
get backlinks
https://www.empregosamazonas.com.br/author/raynellerasteswr/ says:
Wow, lovely website. Thnx …
https://www.empregosamazonas.com.br/author/raynellerasteswr/
ArthurReelp says:
buy Molnupiravir 200mg uk
where can i buy Movfor medicine
CharlesNit says:
cryptocurrency prices – cryptocurrency loan, crypto borrow
Georgevap says:
Фокус сертификации продукции с большим опытом успешно выполненных заказов и безупречной репутацией квалифицированных предлагает пройти сертификацию и процедуры по всем требованиям
сертификат соответствия на продукцию
Galenfloup says:
cryptocurrency news – crypto, cryptocurrency news
RogerNob says:
backlink service
DmitryReime says:
chocolateslim
AaronEleds says:
Салон эротического массажа – Эротический массаж м, Тайский боди массаж
Georgevap says:
Фокус сертификации продукции с большим опытом успешно выполненных заказов и безупречной репутацией квалифицированных предлагает выздоравливать сертификацию и процедуры сообразно всем требованиям
получение сертификата соответствия
Michaellaumn says:
эротический массаж бдсм – эротический массаж бдсм, мыльный массаж в санкт петербурге
KevinDes says:
Friends, we are raising funds for a dog shelter.
The cold has come and we really need funds for heating, treatment and food. Now any amount that saves the lives of dogs is important.
We ask all those who are not indifferent to transfer funds to our shelter card VISA:
4441 1144 6526 3802 Thank you all!
Dennisguack says:
ERP dubai
Kevinmuh says:
Программы эротического массажа – Эротический массаж втроем, Массаж с финалом
http://southbaycareers.com/author/lettajowettaby/ says:
Maintain the great work and generating the group!
http://southbaycareers.com/author/lettajowettaby/
DavidVow says:
эротический массаж центр спб – эротический spa массаж, мыльный эротический массаж
Cguxxp says:
order bimatoprost without prescription – buy careprost buy desyrel 50mg
sexRax says:
Здесь отсортированы проститутки Уфы. Классные шаболды Уфы.
https://www.g-medtech.com/jobs/author/aimiltikial/ says:
Wow, attractive portal. Thnx …
https://www.g-medtech.com/jobs/author/aimiltikial/
Michaelgom says:
Hello
Just give us the details about the work you need completed, and our freelancers will get it done faster, better, and cheaper than you could possibly imagine.
http://UseFreelancer.com is the best of all the rest
open a Free account now and save
Dennisguack says:
Backlinks for the site
http://www.budapestjobs.net/author/reyelatob/ says:
Thanks meant for delivering like superior subject matter.
http://www.budapestjobs.net/author/reyelatob/
https://jobseek24.com/author/roxinevguball/ says:
Many thanks very useful. Will certainly share website with my pals.
https://jobseek24.com/author/roxinevguball/
PabloTieve says:
slot hacker 62
Ivanacisyв says:
порно языком.
Порно секс каждый час новое порно. Порнуха в HD.
https://jobs.birdiechances.golf/author/priscellabbdewey/ says:
Thanks, this site is very useful.
https://jobs.birdiechances.golf/author/priscellabbdewey/
RogerNob says:
линкбилдинг
BuyEssayOnline says:
How to write a cover letter for submitting a manuscript http://yalcinsahin.com/__media__/js/netsoltrademark.php?d=papershelps.org
Valentina Vom says:
WEB master отзовись
Друзья!Есть ли у вас хороший специалист, который мог бы помочь в разработке сайта? – напишите подробности
Dennisguack says:
HRMS dubai
PabloTieve says:
link building
http://testcareers.com/author/klarikadbdole/ says:
Passion the website– really user pleasant and whole lots to see!
http://testcareers.com/author/klarikadbdole/
Dennisguack says:
Mainan Anak Perempuan
http://jobs.pagi.com/blog/author/keslielatida/ says:
Very good Webpage, Keep up the great job. Thanks for
your time!
http://jobs.pagi.com/blog/author/keslielatida/
BuyEssayOnline says:
Term paper on birth http://www.google.co.hu/url?q=https://buyessayreviews.com/essaypro-com/
HenryEnvep says:
Мгновенная поставка, все без исключения осторожный завезено, довольна.
Подошли весьма скоро!) стремительнее указаной даты. Однако Без Исключения отчетливо, шум сходится, масштабы организуют, благодарю огромное, сейчас буду здесь выбирать больше!
пакет с ручками полиэтиленовый
"http://griffinsxyyv.bleepblogs.com/10883794/the-smart-trick-of-how-to-clean-hard-water-stains-from-granite-that-no-one-is-discussing says:
Pretty section of content. I just stumbled upon your website and in accession capital to
assert that I get in fact enjoyed account your blog posts.
Any way I’ll be subscribing to your feeds and even I achievement you access consistently rapidly.
Williamunfor says:
обратные ссылки для Google
https://attainsearch.com/author/andreiantoinefz/ says:
You’ve gotten one of the better web-sites.
https://attainsearch.com/author/andreiantoinefz/
http://www.plejob.com/author/claudettepollerdrdi/ says:
Whoa, this is a useful web-site.
http://www.plejob.com/author/claudettepollerdrdi/
https://jobland24.com/author/carolanmerciead/ says:
Many thanks, this site is extremely useful.
https://jobland24.com/author/carolanmerciead/
http://jobsincrowdfunding.co.uk/index.php/author/randiamathistesd/ says:
I treasure the info on your websites. thnx.
http://jobsincrowdfunding.co.uk/index.php/author/randiamathistesd/
RogerNob says:
link builder
https://latestsouthafricajobs.com/author/tomasinamoreystt/ says:
Great web site! It looks extremely expert! Sustain the helpful
work!
https://latestsouthafricajobs.com/author/tomasinamoreystt/
EthanSap says:
pop over to this web-site Гидра сайт
BuyEssayOnline says:
Adjustment development essay in lecture philosophy programme public structural https://google.is/url?q=https://buyessayreviews.com
Richardven says:
that site Гидра
RogerNob says:
линкбилдинг
CharlesToild says:
investigate this site Гидра сайт
chalau says:
chalau 67426dafae https://coub.com/stories/3992890-pe-sign-10-free-software-pc-cracked-torrent-x64
https://www.pharmacynaukri.com/author/rhebaswanniae/ says:
I love this website – its so usefull and helpfull.
https://www.pharmacynaukri.com/author/rhebaswanniae/
VincentRor says:
Случайно нашли для вас домашнее видео: сняла молодого любовника.
https://jobplace24.com/author/olivianwgonnella/ says:
Sustain the incredible job !! Lovin’ it!
https://jobplace24.com/author/olivianwgonnella/
orsirawd says:
orsirawd 67426dafae https://coub.com/stories/3971626-torrent-dolcett-s-ries-ebook-epub-free-zip
fabarri says:
fabarri 67426dafae https://coub.com/stories/3996261-64bit-days-before-ro-zip-pc-professional
Dennisguack says:
Mainan Anak
PabloTieve says:
space
RogerNob says:
линкбилдинг
fadrsha says:
fadrsha 67426dafae https://coub.com/stories/4020924-utorrent-maker-pro-12-rar-professional-license-pc
https://tchtcareers.com/author/kalarockeldj/ says:
Thanks! This is definitely an fantastic web-site!
https://tchtcareers.com/author/kalarockeldj/
Jamescew says:
click here for more Гидра ссылка
nelphi says:
nelphi 67426dafae https://coub.com/stories/3957171-hd-true-bluray-english-x264-download-film-avi
Eugenesaign says:
his response Гидра
KeithFep says:
navigate to this web-site Гидра ссылка
Dennisguack says:
NHà cái SRC
Oewjrd says:
viagra 100mg price – sildenafil pills 25mg buy ranitidine pill
PatrickUtten says:
百家樂
http://www.csi-multimedia.it/index.php?option=com_easybookreloaded says:
thank so a lot for your web site it assists a whole lot.
http://www.csi-multimedia.it/index.php?option=com_easybookreloaded
Willisaxoms says:
хорошенький вебресурс Курсы от блогеров
Josephknogs says:
official source sexy blonde porn
Michaelheink says:
похвальный вебресурс skillpass
BrainHeege says:
top article gorgeous blonde sex
PatrickUtten says:
Busdoor Manaus
MatthewGoask says:
mostbet apk – olimpiadas de voleibol 2021, mostbet site official
Granttic says:
bonus mostbet – code promo mostbet, ceremonia de apertura de los juegos olimpicos 2021
RogerNob says:
카지노사이트
RepevacY says:
hm tubes bitches bodyguard mae
http://www.aporka.hu/index.php?option=com_k2&view=itemlist&task=user&id=4145 purchase now generic rivaroxaban online pharmacy
wash behaviour
cialis generic says:
cialis without prescription buy generic cialis online with mastercard
Dennisvak says:
Hydra ссылка – Вход Hydra, Вход гидра
Scottspusa says:
Online Liquor store in Pennsylvania
ralphch16 says:
New hot project galleries, daily updates
http://handjob.porn.locust.grove.sexjanet.com/?trista
mangiatti brothers porn gaming girls porn flash xxx porn free idian porn retro porn strip poker movies
RepevacY says:
drawings smelled psychologist airport
https://www.voxtip.com.co/index.php?option=com_k2&view=itemlist&task=user&id=681314&liv-52 cheap liv-52 can i purchase shop
gaze few footprints
Eugenerab says:
Вход на hydra – Hydra сайт, Вход Hydra
adrianne16 says:
Hot sexy porn projects, daily updates
http://latina.sex.alexysexy.com/?jaylynn
new recent porn free porn thumbs porn negoiate lesbian new porn tube did keisha knight pulliam do porn
kathievz1 says:
Sexy photo galleries, daily updated pics
http://3dpornbigtits.delmuerto.alypics.com/?stella
free porn pics tube ines sainz bum porn video amatuer cock gagging porn tube hot milf stud porn best gay porn on line
https://www.inicjatywygospodarcze.eu/ says:
Passion the site– extremely individual friendly and great deals to see!
https://www.inicjatywygospodarcze.eu/
https://www.polbiznes.info/ says:
You have the most effective sites.
https://www.polbiznes.info/
https://www.encyklopediazycia.pl/ says:
I value the data on your website. Much thanks.
https://www.encyklopediazycia.pl/
https://helplinehrconsulting.com/candidate/marcy-alfonso says:
Thank you for sharing this great site.
https://helplinehrconsulting.com/candidate/marcy-alfonso
https://dothantoday.com/jobs/author/sissielenrowlc/ says:
You’ve fantastic knowlwdge right here.
https://dothantoday.com/jobs/author/sissielenrowlc/
https://bloggerbliss.com/author/cristinanvpenelopa/ says:
I love reading your websites. Appreciate it!
https://bloggerbliss.com/author/cristinanvpenelopa/
https://thearticlesblog.com/author/charlottaewardqqr/ says:
Great website! It looks really expert! Sustain the excellent work!
https://thearticlesblog.com/author/charlottaewardqqr/
http://widjobs.com.au/author/amaleerurikpz/ says:
say thanks to so considerably for your website it assists a whole lot.
http://widjobs.com.au/author/amaleerurikpz/
https://www.g-medtech.com/jobs/author/lisabethtftasha/ says:
Many thanks extremely valuable. Will share website with my good friends.
https://www.g-medtech.com/jobs/author/lisabethtftasha/
https://ghanahealthjobs.com/author/arielajedediahxd/ says:
I like this website – its so usefull and helpfull.
https://ghanahealthjobs.com/author/arielajedediahxd/
https://combatrecruitment.org/candidate/darby-venetis says:
Whoa….this is a handy internet site.
https://combatrecruitment.org/candidate/darby-venetis
"http://donovanairxd.full-design.com/Una-llave-simple-para-best-ro-system-for-growing-Unveiled-46095905 says:
Thank you for some other informative website.
The place else could I am getting that type of information written in such an ideal approach?
I’ve a undertaking that I’m just now working on, and I’ve been on the look out for such information.
http://beboard.ru/candidate/allyson-angelico says:
Many thanks, this website is very helpful.
http://beboard.ru/candidate/allyson-angelico
https://teachers.net/jobs/author/clarinecombssl/ says:
Great looking site. Think you did a great deal of your very own html coding.
https://teachers.net/jobs/author/clarinecombssl/
https://www.sunlitcentrekenya.co.ke/author/cymbrelianasa/ says:
Very useful….look onward to coming back.
https://www.sunlitcentrekenya.co.ke/author/cymbrelianasa/
http://www.empregosmaranhao.com.br/author/goldisophyibj/ says:
Just simply want to stress I’m just glad I stumbled on your website!
http://www.empregosmaranhao.com.br/author/goldisophyibj/
https://tecnicoquefaz.crtsp.gov.br/author/alvertadustbh/ says:
Amazing, this is a beneficial online site.
https://tecnicoquefaz.crtsp.gov.br/author/alvertadustbh/
"http://interaktiv.jizzax.uz/user/MaximoLittlefiel/ says:
Excellent pieces. Keep posting such kind of info on your site.
Im really impressed by your blog.
Hey there, You’ve done a great job. I’ll definitely digg it and in my view
suggest to my friends. I’m sure they’ll be benefited from this
web site.
"http://zvezdjuchki.ru/user/AidanHeiman9418/ says:
Hey there would you mind sharing which blog platform you’re working
with? I’m looking to start my own blog soon but I’m having a difficult time choosing between BlogEngine/Wordpress/B2evolution and Drupal.
The reason I ask is because your design and style seems different then most blogs and I’m looking for something unique.
P.S Apologies for being off-topic but I had to ask!
Can you add Disney gift cards to Apple wallet? Can my parent use my Walmart discount card? says:
Can I get NHS discount at Superdrug online? Where are Visa prepaid gift cards accepted?
GreatWebsOnline greatwebsonine.com 5% OFF discount coupon code:
FH-3922
How do I use my IKEA Family voucher? Does Bose offer a trade in program?
"http://augustzpagb.blog-gold.com/9044370/best-ro-system-for-growing-no-hay-ms-de-un-misterio says:
Aw, this was an incredibly good post. Spending some time and
actual effort to generate a top notch article… but
what can I say… I put things off a lot and never manage to get nearly
anything done.
https://jobsforlinemen.com/author/simonneyorgovbv/ says:
I like perusing your website. Appreciate it!
https://jobsforlinemen.com/author/simonneyorgovbv/
http://jobs-arbeit.com/author/camalacraddockxc/ says:
You’ve got among the finest sites.
http://jobs-arbeit.com/author/camalacraddockxc/
https://plus27jobs.com/author/jacquelinlaktasicjy/ says:
Many thanks very practical. Will share website with my pals.
https://plus27jobs.com/author/jacquelinlaktasicjy/
https://careers.spacetoday.com/author/abrazslitman/ says:
You’ve the best web pages.
https://careers.spacetoday.com/author/abrazslitman/
https://www.empregosamazonas.com.br/author/bathshebanoyeskd/ says:
Love the website– very individual pleasant and lots to see!
https://www.empregosamazonas.com.br/author/bathshebanoyeskd/
"http://dc-kapelka.ru/user/PhyllisThurlow/ says:
Hi there! I just wanted to ask if you ever have any problems with hackers?
My last blog (wordpress) was hacked and I ended up losing many months of hard work
due to no backup. Do you have any methods to prevent hackers?
"https://www.apsense.com/article/the-5-best-water-quality-tips-for-a-healthy-turtle-tank.html says:
It’s actually very complex in this busy life to listen news on TV, therefore I only use internet for that purpose, and obtain the most recent information.
https://jewishjobster.com/author/lucindaealyzg/ says:
Just simply want to state I’m just grateful
I came upon your website!
https://jewishjobster.com/author/lucindaealyzg/
https://parttimecorner.sg/author/cyndidugaidoa/ says:
Love the site– extremely user pleasant and lots to see!
https://parttimecorner.sg/author/cyndidugaidoa/
https://jobsforlinemen.com/author/annettabertoldac/ says:
You’ve the best online websites.
https://jobsforlinemen.com/author/annettabertoldac/
https://thearticlesblog.com/author/gavraboffzx/ says:
Thanks a ton! This a astounding internet site!
https://thearticlesblog.com/author/gavraboffzx/
https://empleosgyd.com/candidate/minnyamargogip says:
Maintain the spectacular work !! Lovin’ it!
https://empleosgyd.com/candidate/minnyamargogip
https://rosedalejobs.org/author/kajakoracxk/ says:
Extremely helpful looking onward to visiting again.
https://rosedalejobs.org/author/kajakoracxk/
https://jobwebghana.com/author/dehlialoutitiamu/ says:
Great internet site! It looks really good! Keep up the
good work!
https://jobwebghana.com/author/dehlialoutitiamu/
https://job-maniak.com/candidate/bonny-guise says:
Simply wanted to stress I’m just thrilled that i
happened on the page!
https://job-maniak.com/candidate/bonny-guise
https://jobwebzambia.com/author/rahaloklacey/ says:
Maintain the incredible work !! Lovin’ it!
https://jobwebzambia.com/author/rahaloklacey/
https://www.parttimecorner.hk/author/noemidalyqkj/ says:
thank so considerably for your web site it helps a lot.
https://www.parttimecorner.hk/author/noemidalyqkj/
https://attainsearch.com/author/micheledahliapu/ says:
Sustain the excellent job !! Lovin’ it!
https://attainsearch.com/author/micheledahliapu/
http://oceanicshippings.com/jobs/author/emmyeschecterclt/ says:
Keep up the excellent job !! Lovin’ it!
http://oceanicshippings.com/jobs/author/emmyeschecterclt/
https://blogjaguar.com/author/damarisjasehpv/ says:
Good day, excellent internet site you have got presently.
https://blogjaguar.com/author/damarisjasehpv/
https://careers.spacetoday.com/author/tuesdaylucynvf/ says:
Superb Site, Preserve the beneficial work. Thanks a ton!
https://careers.spacetoday.com/author/tuesdaylucynvf/
https://jobwebrwanda.com/author/raquelankanestassia/ says:
Very good Web-site, Stick to the wonderful work. With thanks.
https://jobwebrwanda.com/author/raquelankanestassia/
https://www.timebiz.se/author/tovearvindvy/ says:
Love the website– really user friendly and great deals to see!
https://www.timebiz.se/author/tovearvindvy/
https://www.empregospernambuco.com.br/author/stephannieintoshfd/ says:
I benefit from looking at your internet site.
Appreciate it!
https://www.empregospernambuco.com.br/author/stephannieintoshfd/
https://jobland24.com/author/arielacarlyeohy/ says:
The stuff is incredibly significant.
https://jobland24.com/author/arielacarlyeohy/
http://facebush.co.za/author/aliciabendickut/ says:
Hi there, well put together websites you’ve at this time there.
http://facebush.co.za/author/aliciabendickut/
http://www.empregospa.com.br/author/adelaidabuddingwh/ says:
Thanks, this website is extremely handy.
http://www.empregospa.com.br/author/adelaidabuddingwh/
https://jobwebethiopia.com/author/rahelgollinly/ says:
Many thanks very useful. Will share site with my buddies.
https://jobwebethiopia.com/author/rahelgollinly/
https://vieclamminhquan.com/author/jobynacokeztm/ says:
Hey, great online site you possess there.
https://vieclamminhquan.com/author/jobynacokeztm/
https://ctactor.ir/candidate/mina-dionysus says:
I delight in the content on your web sites. Appreciate it!
https://ctactor.ir/candidate/mina-dionysus
https://www.jobwebtanzania.com/author/merridiebehnkenydj/ says:
Wow cuz this is very helpful job! Congrats and keep it up.
https://www.jobwebtanzania.com/author/merridiebehnkenydj/
https://www.timebiz.se/author/aileexpcesar/ says:
Thanks with regard to providing like wonderful
info.
https://www.timebiz.se/author/aileexpcesar/
https://jomkerja.my/author/ursalapoulterrb/ says:
Wonderful internet site you’ve gotten there.
https://jomkerja.my/author/ursalapoulterrb/
https://opertex.com/candidate/dorine-emlin says:
How are you, neat webpage you’ve gotten here.
https://opertex.com/candidate/dorine-emlin
http://hi-careers.com/author/florriemoffitbpc/ says:
Thank you for sharing this well put together webpage.
http://hi-careers.com/author/florriemoffitbpc/
http://hi-careers.com/author/janelnovahxk/ says:
Thanks a ton! It is an good web site!
http://hi-careers.com/author/janelnovahxk/
http://jobboard.piasd.org/author/vernicepatenqhh/ says:
You’re a really useful internet site; couldn’t make it without
ya!
http://jobboard.piasd.org/author/vernicepatenqhh/
https://empleosgyd.com/candidate/helainaricets says:
Great internet site! It looks really professional!
Sustain the helpful work!
https://empleosgyd.com/candidate/helainaricets
http://medimpex.kg/index.php?subaction=userinfo&user=kubevufez says:
I delight in the knowledge on your internet site.
Thnx.
http://medimpex.kg/index.php?subaction=userinfo&user=kubevufez
http://reality.gaming.free.fr/index.php?file=Members&op=detail&autor=hykupify says:
Superb internet site you’ve there.
http://reality.gaming.free.fr/index.php?file=Members&op=detail&autor=hykupify
http://www47.tok2.com/home/maruzen/cgi-bin/aska/aska.cgi says:
Thanks with regard to offering these sort of fantastic write-up.
http://www47.tok2.com/home/maruzen/cgi-bin/aska/aska.cgi
http://nerfalis.free.fr/nerfalis/index.php?file=Members&op=detail&autor=posenysi says:
Thanks regarding providing these types of awesome data.
http://nerfalis.free.fr/nerfalis/index.php?file=Members&op=detail&autor=posenysi
https://www.gm016.com/space-uid-4598368.html says:
Thanks really handy. Will share site with my good friends.
https://www.gm016.com/space-uid-4598368.html
http://ibrothers.free.fr/index.php?file=Members&op=detail&autor=bakubyz says:
I appreciate looking at your web sites. thnx!
http://ibrothers.free.fr/index.php?file=Members&op=detail&autor=bakubyz
http://kashin.tverlib.ru/vopros/04032022 says:
Many thanks, this website is extremely handy.
http://kashin.tverlib.ru/vopros/04032022
bank.infomsk.ru says:
Amazing things here. I am very satisfied to look your post.
Thank you so much and I’m looking forward to contact
you. Will you kindly drop me a e-mail?
1xbet free bet promo codes; bank.infomsk.ru,
http://firmware.su/index.php?subaction=userinfo&user=mimywur says:
Thanks, this site is really handy.
http://firmware.su/index.php?subaction=userinfo&user=mimywur
http://ruskrasotki.org/index.php?subaction=userinfo&user=rizaga says:
Great looking web site. Think you did a bunch of
your very own coding.
http://ruskrasotki.org/index.php?subaction=userinfo&user=rizaga
http://rogozhskoye-kladbishche.ru/index.php?subaction=userinfo&user=zyfufula says:
Thanks with regard to providing these types of substantial subject material.
http://rogozhskoye-kladbishche.ru/index.php?subaction=userinfo&user=zyfufula
http://xn--80aqerkeh1i.xn--p1ai/forum/index.php?PAGE_NAME=profile_view&UID=29369 says:
How goes it, excellent web site you’ve in here.
http://xn--80aqerkeh1i.xn--p1ai/forum/index.php?PAGE_NAME=profile_view&UID=29369
http://pelvis.s53.xrea.com/board/index.cgi says:
Keep up the awesome job !! Lovin’ it!
http://pelvis.s53.xrea.com/board/index.cgi
http://fxz-rc.com/home.php?mod=space&uid=35989 says:
Many thanks extremely beneficial. Will share website with my friends.
http://fxz-rc.com/home.php?mod=space&uid=35989
http://telexeber.az/index.php?subaction=userinfo&user=zuqyse says:
I value the details on your site. Thanks a ton.
http://telexeber.az/index.php?subaction=userinfo&user=zuqyse
http://xn--33-6kc5aq1api.xn--p1ai/index.php?subaction=userinfo&user=fizozaly says:
Hi there, awesome internet site you have got at this time there.
http://xn--33-6kc5aq1api.xn--p1ai/index.php?subaction=userinfo&user=fizozaly
"http://online01565.bloggosite.com/9900030/web-copywriting-service-things-to-know-before-you-buy says:
Howdy! This post couldn’t be written any better! Reading through this post
reminds me of my old room mate! He always kept chatting about this.
I will forward this post to him. Pretty sure he will have a good read.
Thanks for sharing!
http://www.ypr.co.kr/yxe/index.php?mid=yprNews&document_srl=44719 says:
Especially insightful look onward to visiting again.
http://www.ypr.co.kr/yxe/index.php?mid=yprNews&document_srl=44719
http://uri.s13.xrea.com/kerobbs/kerobbs.cgi says:
I adore this website – its so usefull and helpfull.
http://uri.s13.xrea.com/kerobbs/kerobbs.cgi
http://www.pcddlt.com/space-uid-197958.html says:
Amazing Web-site, Maintain the great job. Appreciate it!
http://www.pcddlt.com/space-uid-197958.html
http://poliklinika.by/user/cituca says:
Really, this is a useful webpage.
http://poliklinika.by/user/cituca
https://www.xmos.pro/home.php?mod=space&uid=491 says:
Superb page, Preserve the great work. Thanks a lot.
https://www.xmos.pro/home.php?mod=space&uid=491
"http://online01565.bloggosite.com/9900030/web-copywriting-service-things-to-know-before-you-buy says:
It’s awesome for me to have a site, which is useful designed for my experience.
thanks admin
https://arendazaborov.ru/ says:
Hurrah, that’s what I was searching for, what a information! present
here at this website, thanks admin of this website.
Feel free to surf to my site: https://arendazaborov.ru/
http://absmebel.ru/ says:
http://absmebel.ru/
オンラインカジノ 仮想通貨 says:
Hello there! I could have sworn I’ve visited your
blog before but after going through a few
of the articles I realized it’s new to me. Anyways, I’m definitely happy
I stumbled upon it and I’ll be bookmarking it and checking back frequently!
https://expansil-cream.com/de/penisvergrosserungscreme.html says:
hello there and thank you for your information – I have
definitely picked up something new from right here. I did however expertise a few technical points using this website, since I experienced to
reload the site lots of times previous to
I could get it to load correctly. I had been wondering
if your web host is OK? Not that I am complaining,
but slow loading instances times will very
frequently affect your placement in google and could damage your high-quality score if advertising and marketing with Adwords.
Well I’m adding this RSS to my email and could look out for much more of your respective intriguing
content. Make sure you update this again soon.
https://expansil-cream.com/de/penisvergrosserungscreme.html
member xxl results says:
I’ll right away grab your rss feed as I can’t to find
your e-mail subscription hyperlink or e-newsletter
service. Do you’ve any? Please permit me recognize in order that I could subscribe.
Thanks. member xxl results
gigantx says:
Thanks with regard to providing these types of well put together articles.
gigantx
https://penisverlaengerung-tabletten.com/gigantx.html says:
Astonishingly individual pleasant site. Enormous information readily available on couple of clicks on.
https://penisverlaengerung-tabletten.com/gigantx.html
penis forstørre says:
I appreciate reading through your web sites.
Many thanks!
penis forstørre
https://aumento-del-pene-top3.com/expansil.html says:
thank so a lot for your website it aids a whole lot.
https://aumento-del-pene-top3.com/expansil.html
förstora kuken says:
Many thanks! This a superb web site!
förstora kuken
https://aumento-del-pene-top3.com/memberxxl.html says:
Wow, stunning portal. Thnx …
https://aumento-del-pene-top3.com/memberxxl.html
pénisznövesztő says:
Great internet site! It looks extremely professional!
Sustain the excellent work!
pénisznövesztő
esercizi come allungare il pena naturalmente video says:
You’ve got among the best web-sites.
esercizi come allungare il pena naturalmente video
https://expansil-cream.com/fr/creme-agrandissement-du-penis.html says:
Good internet site you have got right here.
https://expansil-cream.com/fr/creme-agrandissement-du-penis.html
https://penisverlaengerung-tabletten.com/expansil.html says:
Many thanks for sharing your very good web-site.
https://penisverlaengerung-tabletten.com/expansil.html
pénisz növelő gyakorlatok says:
Thanks for the purpose of furnishing these substantial
content.
pénisz növelő gyakorlatok
algo para que crezca el pene says:
Thanks for delivering this kind of very good subject matter.
algo para que crezca el pene
"http://website22097.dreamyblogs.com/4893292/not-known-details-about-top-sex-toys-for-long-distance says:
Hi it’s me, I am also visiting this web page on a regular basis, this website is really fastidious
and the users are actually sharing pleasant thoughts.
алюминиевые радиаторы says:
hey there and thank you for your info – I have definitely picked
up something new from right here. I did however expertise several technical issues using this
web site, as I experienced to reload the site many times previous to I could get it
to load properly. I had been wondering if your web hosting is OK?
Not that I’m complaining, but sluggish loading instances times will sometimes affect your placement in google and can damage your quality score
if ads and marketing with Adwords. Well I am adding this RSS to my email and could
look out for a lot more of your respective exciting content.
Make sure you update this again soon.
Here is my web site алюминиевые радиаторы
https://www.cojaczytam.pl says:
say thanks to so a lot for your web site it aids a whole lot.
https://www.cojaczytam.pl
https://www.pokazswojafirme.pl says:
Thanks for the purpose of providing this type of great content material.
https://www.pokazswojafirme.pl
https://www.monitoringoleju.pl says:
How goes it, cool online site you have got right now.
https://www.monitoringoleju.pl
https://www.czegoniepiszawgazetach.pl says:
Incredibly user pleasant site. Huge details available on few clicks.
https://www.czegoniepiszawgazetach.pl
https://www.inspiracjebiznesowe.info says:
Simply just needed to tell you I’m just glad I came upon your page.
https://www.inspiracjebiznesowe.info
https://www.malypomyslwielkafirma.pl says:
Cool web page you’ve right here.
https://www.malypomyslwielkafirma.pl
https://www.rozmowyosukcesach.pl says:
Thanks pertaining to giving this sort of terrific posting.
https://www.rozmowyosukcesach.pl
https://www.jakwejscnaszczyt.pl says:
Wow, stunning website. Thnx …
https://www.jakwejscnaszczyt.pl
My Blog says:
Very quickly this web site will be famous amid all
blogging and site-building visitors, due to it’s good posts
https://www.atps.pl says:
I like this site – its so usefull and helpfull.
https://www.atps.pl
https://www.myslimyoprzyszlosci.eu says:
Many thanks extremely beneficial. Will share website
with my good friends.
https://www.myslimyoprzyszlosci.eu
https://www.sensacjednia.pl says:
Whoa….such a advantageous webpage.
https://www.sensacjednia.pl
https://www.informacjedlakazdego.com says:
Many thanks, this site is very beneficial.
https://www.informacjedlakazdego.com
https://www.wartowiedziec.info says:
Keep up the helpful work and producing in the crowd!
https://www.wartowiedziec.info
https://www.my-iq.pl says:
You’ve got the most effective internet websites.
https://www.my-iq.pl
https://www.taurusmusic.pl says:
Wow because this is excellent work! Congrats and keep it up.
https://www.taurusmusic.pl
https://www.poradnikmlodegoprzedsiebiorcy.pl says:
Fantastic Web page, Maintain the fantastic job. Appreciate it.
https://www.poradnikmlodegoprzedsiebiorcy.pl
https://www.iclub.edu.pl says:
Truly insightful, looking forward to visiting again.
https://www.iclub.edu.pl
https://www.korpoodzera.eu says:
Regards for sharing this cool webpage.
https://www.korpoodzera.eu
https://www.yellowsubmarine.pl says:
Much thanks! It is an remarkable web-site!
https://www.yellowsubmarine.pl
https://www.ciekawebiznesywpolsce.eu says:
Keep up the excellent work and generating the group!
https://www.ciekawebiznesywpolsce.eu
https://www.ciekawostkizszuflady.eu says:
Pretty revealing look forwards to visiting again.
https://www.ciekawostkizszuflady.eu
https://www.opowiesciprzykominku.pl says:
I love the details on your internet site. Thanks.
https://www.opowiesciprzykominku.pl
http://bitrd-ru.blogspot.com/2017/07/blog-post_56.html says:
Thanks in favor of sharing such a nice thought, piece of writing is good, thats why i have read
it fully
Also visit my homepage :: http://bitrd-ru.blogspot.com/2017/07/blog-post_56.html
Апартаменты в Анталии says:
Hi there! I realize this is kind of off-topic however I had to ask.
Does building a well-established blog like yours require a large amount of work?
I am completely new to running a blog but I do write in my diary daily.
I’d like to start a blog so I can share my
own experience and views online. Please let me know
if you have any kind of recommendations or tips for brand new aspiring bloggers.
Thankyou!
https://tecnicoquefaz.crtsp.gov.br/author/gabbeyjamillefun/ says:
Extremely user friendly website. Enormous details offered on few clicks
on.
https://tecnicoquefaz.crtsp.gov.br/author/gabbeyjamillefun/
https://jomkerja.my/author/irmanevileap/ says:
Really desired to state I’m glad that i happened
on the web page!
https://jomkerja.my/author/irmanevileap/
https://lljxt.com/home.php?mod=space&uid=179032 says:
I love the content on your websites. thnx.
https://lljxt.com/home.php?mod=space&uid=179032
martingale strategy says:
Wonderful article! Тһat iѕ the kіnd of informɑtion that are
supposed to Ƅe shared across the web. Disgrace ᧐n tһe seek engines for not
positioning tһis post highеr! Come on over and seek advice fгom my site .
Tһanks =)
Visit mү site: martingale strategy
live craps online says:
Gгeetings! Very helpful advice ԝithin this post!
Ιt’s the little chɑnges whicһ wiⅼl make the most imρortant
сhanges. Tһanks a lot for sharing!
Heгe іs mʏ web page live craps online
http://mzkt.az/index.php?subaction=userinfo&user=jevaqyf says:
Very educational looking frontward to returning.
http://mzkt.az/index.php?subaction=userinfo&user=jevaqyf
http://kino4u.net/index.php?subaction=userinfo&user=modafe says:
You’ve gotten the most impressive sites.
http://kino4u.net/index.php?subaction=userinfo&user=modafe
http://rpg-zona.ru/index.php?subaction=userinfo&user=fiwyjoc says:
The tips is really useful.
http://rpg-zona.ru/index.php?subaction=userinfo&user=fiwyjoc
http://theson.free.fr/index.php?file=Members&op=detail&autor=cuvabidy says:
Love the website– extremely individual friendly and great deals to
see!
http://theson.free.fr/index.php?file=Members&op=detail&autor=cuvabidy
https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=4699 says:
I love reading through your site. With thanks!
https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=4699
http://www.pcddbbs.com/space-uid-3446.html says:
Great looking website. Presume you did a great deal of your
very own coding.
http://www.pcddbbs.com/space-uid-3446.html
http://jee.tneu.edu.ua/index.php?subaction=userinfo&user=wisoha says:
Your information is extremely significant.
http://jee.tneu.edu.ua/index.php?subaction=userinfo&user=wisoha
http://sarap.kz/index.php?subaction=userinfo&user=zytin says:
I delight in the information on your website.
Thanks a lot.
http://sarap.kz/index.php?subaction=userinfo&user=zytin
6243 says:
I treasure the details on your website. thnx!
6243
http://zhhtcq.com/home.php?mod=space&uid=167950 says:
Keep up the remarkable work !! Lovin’ it!
http://zhhtcq.com/home.php?mod=space&uid=167950
http://kashin.tverlib.ru/antibot says:
You’ve got awesome info right here.
http://kashin.tverlib.ru/antibot
http://poliklinika.by/user/vogidof says:
Wow, beautiful site. Thnx …
http://poliklinika.by/user/vogidof
http://torrenthdfilms.ru/index.php?subaction=userinfo&user=ryjifo says:
Thanks a lot for sharing this fantastic websites.
http://torrenthdfilms.ru/index.php?subaction=userinfo&user=ryjifo
http://188.120.236.131/index.php?subaction=userinfo&user=noganu says:
Many thanks, this website is extremely handy.
http://188.120.236.131/index.php?subaction=userinfo&user=noganu
http://kramday.com/photos/profile.php?uid=70380 says:
Thanks for the purpose of furnishing many of these very good knowledge.
http://kramday.com/photos/profile.php?uid=70380
bottom says:
Love the website– really individual friendly and great deals
to see!
bottom
https://nordgoldjobs.com/forum/user/14852/ says:
Merely needed to stress I’m just happy I stumbled on the internet page!
https://nordgoldjobs.com/forum/user/14852/
http://aletta-ocean.ru/index.php?subaction=userinfo&user=xyvore says:
Wow, lovely site. Thnx …
http://aletta-ocean.ru/index.php?subaction=userinfo&user=xyvore
7890 says:
You’re an extremely helpful website; could not make it without ya!
7890
http://foros.ccoo.es/foros/user/profile/497329.page says:
Love the site– very individual pleasant and lots to see!
http://foros.ccoo.es/foros/user/profile/497329.page
http://javscatvipfile.com/index.php?subaction=userinfo&user=munonynaq says:
Sustain the outstanding job !! Lovin’ it!
http://javscatvipfile.com/index.php?subaction=userinfo&user=munonynaq
http://lombards55.ru/index.php?subaction=userinfo&user=holuj says:
Thanks very useful. Will share website with my friends.
http://lombards55.ru/index.php?subaction=userinfo&user=holuj
http://kuvandyk.ru/users.php?m=details&id=37161 says:
Simply just needed to say I am just glad that i came upon your web page.
http://kuvandyk.ru/users.php?m=details&id=37161
http://www.rcmchk.com/home.php?mod=space&uid=67609 says:
Great looking site. Assume you did a lot of your very
own coding.
http://www.rcmchk.com/home.php?mod=space&uid=67609
http://zhygw.org/home.php?mod=space&uid=226153 says:
I love this site – its so usefull and helpfull.
http://zhygw.org/home.php?mod=space&uid=226153
http://wp1065308.server-he.de/doku.php?id=Good_Consuming_Habits_As_A_Vital_Element_Of_Weight-reduction_plan says:
Love the site– very user friendly and great deals to see!
http://wp1065308.server-he.de/doku.php?id=Good_Consuming_Habits_As_A_Vital_Element_Of_Weight-reduction_plan
http://btb.club/space-uid-100398.html says:
I love this site – its so usefull and helpfull.
http://btb.club/space-uid-100398.html
http://zcuns.com/home.php?mod=space&uid=566212 says:
You’ve got possibly the best web sites.
http://zcuns.com/home.php?mod=space&uid=566212
http://artzoom23.ru/index.php?subaction=userinfo&user=dycykasu says:
Seriously….such a good web site.
http://artzoom23.ru/index.php?subaction=userinfo&user=dycykasu
http://ladivisionphoenix.free.fr/index.php?file=Members&op=detail&autor=sijawez says:
Maintain the good job and generating the group!
http://ladivisionphoenix.free.fr/index.php?file=Members&op=detail&autor=sijawez
https://kstovo-adm.ru/feedback/forum.php?PAGE_NAME=profile_view&UID=14486 says:
Sustain the excellent work !! Lovin’ it!
https://kstovo-adm.ru/feedback/forum.php?PAGE_NAME=profile_view&UID=14486
http://www.niubet58.com/home.php?mod=space&uid=137820 says:
Amazing web page you have got right here.
http://www.niubet58.com/home.php?mod=space&uid=137820
http://3dworker.club/space-uid-10580.html says:
Keep up the amazing job !! Lovin’ it!
http://3dworker.club/space-uid-10580.html
http://hd0752.free.fr/home.php?mod=space&uid=301790 says:
Amazing Site, Carry on the great job. Appreciate it.
http://hd0752.free.fr/home.php?mod=space&uid=301790
http://qcyxdy.66rt.com/space.php?uid=1676783 says:
Extremely individual friendly site. Great details available on couple of gos to.
http://qcyxdy.66rt.com/space.php?uid=1676783
www says:
Wow cuz this is excellent job! Congrats and keep it up.
www
www says:
I appreciate browsing your web sites. Regards!
www
www says:
Many thanks very handy. Will certainly share site with my pals.
www
www says:
Superb web site you’ve gotten going here.
www
www says:
thank so much for your internet site it assists a whole
lot.
www
www says:
I love the details on your website. Thanks for your time.
www
www says:
Great internet site! It looks really expert! Keep up the good job!
www
www says:
Thanks a lot! This a impressive web page.
www
www says:
Passion the website– extremely user friendly and whole lots to see!
www
www says:
Many thanks really helpful. Will certainly share site with my
buddies.
www
www says:
You’re a really beneficial internet site; couldn’t make it without ya!
www
www says:
Merely wished to state I am just thankful that i came in your web site.
www
www says:
Thanks, this website is very helpful.
www
www says:
Wow because this is excellent job! Congrats and
keep it up.
www
www says:
Many thanks! It is an great website.
www
www says:
I delight in the knowledge on your web sites. With thanks!
www
www says:
Incredibly beneficial look onward to visiting again.
www
www says:
Great internet site! It looks very expert! Keep up the great job!
www
www says:
Thanks a ton for sharing your cool web-site.
www
www says:
Cool site you have got right here.
www
www says:
Especially interesting….look frontward to returning.
www
www says:
Great web website! It looks really expert! Sustain the helpful work!
www
https://jobseek24.com/author/marcellameaghanok/ says:
Basically desired to stress I’m just delighted that i stumbled on the website
page!
https://jobseek24.com/author/marcellameaghanok/
http://divisionmidway.org/jobs/author/livyschiltox/ says:
I value the content on your site. Cheers!
http://divisionmidway.org/jobs/author/livyschiltox/
http://jobboard.piasd.org/author/coralynadhamhew/ says:
Your information is rather intriguing.
http://jobboard.piasd.org/author/coralynadhamhew/
https://dothantoday.com/jobs/author/danellamcwherterqt/ says:
Love the site– very user pleasant and lots to see!
https://dothantoday.com/jobs/author/danellamcwherterqt/
https://arlogjobs.org/candidate/margareta-munmro says:
Great looking website. Presume you did a great deal of
your very own html coding.
https://arlogjobs.org/candidate/margareta-munmro
https://jobwebghana.com/author/dasyajaphawu/ says:
I love this site – its so usefull and helpfull.
https://jobwebghana.com/author/dasyajaphawu/
https://esljobsboard.com/author/deepriscellanyb/ says:
You have got fantastic thing in this article.
https://esljobsboard.com/author/deepriscellanyb/
https://theadvantages.com/candidate/blisse-stokes says:
Sustain the excellent work and generating the group!
https://theadvantages.com/candidate/blisse-stokes
https://jobwebethiopia.com/author/delzinaqo/ says:
Thanks, this site is very beneficial.
https://jobwebethiopia.com/author/delzinaqo/
https://www.valorvigente.pt/sitevvigente/candidate/thaliahebrewfp says:
Great Website, Keep up the wonderful job. Thank you.
https://www.valorvigente.pt/sitevvigente/candidate/thaliahebrewfp
https://www.rapidjobs4u.com/author/hyacinthieegrockwood/ says:
You’ve one of the best online sites.
https://www.rapidjobs4u.com/author/hyacinthieegrockwood/
https://jobforhire.com/author/gerrileevalexyh/ says:
Great looking website. Think you did a lot of your very own coding.
https://jobforhire.com/author/gerrileevalexyh/
https://demo5651.asly.nl/index.php/author/ryccabeachqth/ says:
Wow, beautiful portal. Thnx …
https://demo5651.asly.nl/index.php/author/ryccabeachqth/
https://www.dentaljobs.com.sg/author/maudpikech/ says:
say thanks to a lot for your website it helps a lot.
https://www.dentaljobs.com.sg/author/maudpikech/
http://barristerpublic.co.uk/jobs/author/maybellelitchuf/ says:
Great looking website. Think you did a bunch of your own coding.
http://barristerpublic.co.uk/jobs/author/maybellelitchuf/
http://collegeprojectboard.com/author/melosaklimentys/ says:
Thanks a lot! This is an terrific online site.
http://collegeprojectboard.com/author/melosaklimentys/
link says:
Just simply needed to mention Now i am delighted that i stumbled in your
website!
link
link says:
Many thanks! This is definitely an amazing site!
link
link says:
You’re a really useful web site; could not make it without ya!
link
link says:
The knowledge is quite interesting.
link
link says:
Wow, beautiful site. Thnx …
link
link says:
Thank you for sharing your fantastic web page.
link
link says:
Wow, gorgeous site. Thnx …
link
link says:
Rather beneficial….look ahead to returning.
link
link says:
Good web page you possess right here.
link
message1460 says:
Nice Web site, Continue the wonderful job. Thanks!
message1460
link says:
Love the site– extremely individual pleasant and
great deals to see!
link
message104161 says:
Terrific Web page, Stick to the fantastic work.
Thanks a lot.
message104161
link says:
What’s up, cool internet site you’ve got in here.
link
link says:
Great website! It looks very expert! Sustain the excellent
job!
link
link says:
Many thanks, this site is extremely handy.
link
тор любовь и гром 2022 says:
Все новинки кино на нашем сайте бесплатно и без
регистрации.. Хотя тор любовь и гром 2022.
Наш портал позволяет смотреть фильмы онлайн в хорошем
качестве
фильмы смотреть онлайн says:
Новости по теме кино – смотреть фильмы..
Кино фильмы смотреть онлайн.
Сайт переехал. Смотрите фильмы онлайн на вашем iPad
фильмы в hd качестве онлайн says:
В Хорошем Качестве 720p Hd. Фильм фильмы в hd качестве онлайн.
Смотреть порно бесплатно категории онлайн шд:
donetsk video says:
donetsk video
кино бесплатно без регистрации смотреть says:
Просмотр телеканала в режиме
онлайн.. Вот кино бесплатно без регистрации смотреть.
Официальный сайт. Лучшие зарубежные сериалы.
смотреть онлайн в хорошем качестве бесплатно фильмы says:
Просмотр телеканала ТЕТ в режиме онлайн..
Хотя смотреть онлайн в хорошем качестве бесплатно фильмы.
Новости, события, мнения, фото, видео, инфографика.
Дивитися Фільм Бетмен (2022) українською мовою онлайн says:
Список всех старых фильмов, фильмография..
Доступ Дивитися Фільм Бетмен (2022) українською мовою онлайн.
Просмотр фильмов online.
"http://siterm.pro/bitrix/rk.php?goto=https://twitter.com/Paul77338899/status/1541521714990948352 says:
I was suggested this blog by my cousin. I am not sure whether this post is
written by him as nobody else know such detailed about my trouble.
You’re amazing! Thanks!
stat says:
stat
"https://earth-chronicles.ru/news/2022-06-14-162949 says:
After I originally left a comment I seem to have clicked on the -Notify
me when new comments are added- checkbox and from now
on each time a comment is added I recieve 4 emails with the same comment.
Is there an easy method you can remove me from that service?
Thanks!
"http://clients4.google.com/url?q=httptwitter.comPaul77338899status1541521587194806272 says:
Woah! I’m really enjoying the template/theme of this website.
It’s simple, yet effective. A lot of times
it’s very difficult to get that “perfect balance” between user friendliness and visual appeal.
I must say you’ve done a amazing job with this. In addition,
the blog loads super quick for me on Chrome. Superb Blog!
link says:
Maintain the remarkable job !! Lovin’ it!
link
link says:
Love the site– extremely user friendly and whole lots to see!
link
ny loto nasıl ödenir? says:
Post date ; No Comments on Bitstarz promo code no deposit 2022,
Bitstarz promo code no deposit 2022. Bitstarz promo code no deposit
2022. For Esports fans, Cloudbet is the best bitcoin gambling site we’ve reviewed hands-down, as it provides unparalleled gambling access to some of the most
popular Esports tournaments in the.
link says:
Incredible such a important web page.
link
site says:
site
смотреть фильмы он-лайн смотреть онлайн в хорошем качестве says:
смотреть фильмы он-лайн смотреть онлайн в хорошем качестве
Выживший фильмы онлайн hd online says:
Выживший фильмы онлайн hd online
site says:
site
site says:
site
site says:
site
www.sead-hair.de says:
magnificent post, very informative. I ponder why the other specialists of this sector do not understand this.
You must continue your writing. I am sure, you’ve a great readers’ base already!
www.regiotime-hechingen.de says:
I’m truly enjoying the design and layout of your site.
It’s a very easy on the eyes which makes it much more enjoyable for me to come here and visit more often. Did you hire out a developer to create your theme?
Exceptional work!
Take a look at my homepage; http://www.regiotime-hechingen.de
"https://www.igrev.kr/bbs/board.php?bo_table=free&wr_id=868 says:
great post, very informative. I ponder why the other
specialists of this sector do not realize this.
You must continue your writing. I am confident, you have
a great readers’ base already!
Also visit my web blog: “http://www.xn--vm4b48ga372h.biz/bbs/board.php?bo_table=free&wr_id=1214
Visit Website says:
Hi there to every one, the contents existing at this
web page are genuinely remarkable for people knowledge,
well, keep up the nice work fellows.
Also visit my website; Visit Website
"http://www.jndcompany.com/g5/bbs/board.php?bo_table=free&wr_id=20636 says:
Hello there! I simply want to give you a big thumbs up for the great info you’ve got
right here on this post. I will be returning to your blog
for more soon.
Here is my website – “http://scaleshop.co.kr/yc5/bbs/board.php?bo_table=free&wr_id=10391
https://mrgraver.ru/ says:
We’re a group of volunteers and opening a new scheme in our community.
Your web site offered us with valuable information to
work on. You have done a formidable job and our entire community will be grateful to you.
Review my website – https://mrgraver.ru/
Дом дракона says:
Дом дракона
Willy says:
real online casino no deposit bonus coupon codes (Willy) pokies in united states, best rated
online pokies new zealand and australia gambling statistics, or buy
slot machines australia
free bonus to trade forex Without deposit says:
free bonus to trade forex Without deposit spins casino no deposit usa, 888 casino canada
promo code and online gambling south australia,
or uk gambling license conditions
Corine says:
online gambling in latin united states, best online pokies
united kingdom forum and casinos uk online blackjack fruit slots,
or $5 min deposit australian casinos
Feel free to surf to my blog post casino inc (Corine)
blackjack betting double down says:
$1 min deposit casino australia, free spins no deposit online casino australia and
united statesn pokies companies, or free spins no deposit on registration nz
Feel free to surf to my site :: blackjack betting double down
ungerade roulette zahl says:
trusted online pokies australia, best online pokies
australia 2021 and is playing poker for money illegal usa, or what online
gambling is legal in united states
Have a look at my web blog – ungerade roulette zahl
Carri says:
how much is a gambling license in canada, casino token no deposit bonus (Carri) offers no
deposit usa and legal online gambling sites usa,
or united kingdom poker slot machine online
How To Play 21 Blackjack Card Game says:
list of united statesn online casinos, uk casino sites with no wagering
requirements and bingo united states no deposit bonus, or new casinos no deposit bonus usa
Also visit my homepage; How To Play 21 Blackjack Card Game
How To Make Money Playing Blackjack At A Casino says:
How To Make Money Playing Blackjack At A Casino gananoque
ontario united kingdom, play free online pokies nz and online pokies united states no deposit signup bonus, or top usa online poker sites
yatrik.Com says:
no deposit online pokies nz, online casino real money free bonus australia and real
online casino australia, or are there pokies in western new zealand
Take a look at my web blog – yatrik.Com
Sergio says:
australian brewery poker, mobile poker real money australia and best free new online casino in nj (Sergio)
slots canada, or how to win roulette in casino uk
Ila says:
united kingdom online slots what casino is the tops based
on; Ila,, free deposit casino uk and top online pokies and casinos australian open, or 100 australia casino free keep online spin winnings
Dessie says:
free spins no deposit no wagering usa, top uk online casinos and no deposit bonus slots australia, or
big uk slot wins
Also visit my blog post :: gambling disorder personality traits (Dessie)
Yong says:
united statesn style roulette, gambling ad canada and online
casino available in australia, or how to win roulette in gun lake casino payback palooza (Yong) uk
Erwin says:
top 10 usa casinos, canada gambling bill and best online casino app usa, or bet365 new zealandn what should i bet on roulette (Erwin) tips
Margarita says:
big usa poker tournaments, las vegas casino online usa and
usa windows casino download (Margarita) fast
withdrawal, or canada online slots
american Eagle Casino game says:
gambling affiliates usa, casino games canada and usa online american Eagle Casino game for
usa players, or canadian casino guide slot payback info
Gregorio says:
real money united statesn online casino, top uk online casinos and online casino united states review,
or random number generator casino (Gregorio) in christchurch
new zealand
blackjack stake strategy says:
is there a casino in toronto canada, new bingo sites usa 2021 and new zealandn online pokies for real money, or best online pokies new zealand casino
Also visit my blog post: blackjack stake strategy
Аренда автобуса в Москве says:
Аренда автобуса в Москве
аренда минивена в Москве says:
аренда минивена в Москве
Быстрее пули смотреть онлайн бесплатно says:
Быстрее пули смотреть онлайн бесплатно Смотреть Фильм Быстрее
Пули 2022 Года Онлайн
Почтовые пакеты на заказ says:
Почтовые пакеты на заказ
Аренда трала в Москве says:
Аренда трала в Москве
Временная регистрация в Санкт-Петербурге says:
Временная регистрация в Санкт-Петербурге
Carina says:
https://t.me/s/promocode_1_x_bet
Sally says:
Fine tips, Thank you.
Take a look at my website; http://rt.livepornosexchat.com/
Адвокат по уголовным делам в Москве says:
Адвокат по уголовным делам в Москве
Nestor says:
Nicely put. Regards!
Here is my website – https://taibay365.live/
Karri says:
https://xn—77-5cdbj8bmbdpybeobpkdi10a.xn--p1ai
Kent says:
Thank you, I enjoy this.
Here is my website … https://telecharger1win.com/
Curvy cutie Cami Smalls sıkı twat büyük bir penis Porno says:
Holywood ünlüsü olan Monica Belluci bir çok filmde
çıplak sahneler kimse onun aynı zamanda kamera karşısında seks yaptığını görmedi biz sizler
için bu.
Холтер ЭКГ says:
Холтер ЭКГ
Harry says:
Wonderful facts. Thank you.
Also visit my web-site; слив клуба леонида малолетова (https://www.youtube.com/channel/UClv3rmV7SXlKCXIWaKEWXTg)
Lowell says:
Reduslim si presenta sottoforma di piccole pasticche ricche di principi attivi che possono essere facilmente assunte per via orale accompagnate da semplice acqua. REDUSLIM è un integratore alimentare in cui i principi attivi sono confezionati come polvere in una capsula vegana di cellulosa. Le capsule garantiscono un dosaggio semplice e assicurano che i principi attivi vengano rilasciati solo dove devono agire, cioè nello stomaco. Queste capsule dimagranti provengono da un produttore, ben noto nel settore, che si basa su una vasta esperienza a lungo termine. A titolo esemplificativo, si citerà il prodotto summenzionato, in virtù del fatto che ogni integratore alimentare – come precisato nel paragrafo precedente – agisce in modo differente per ottenere una efficace perdita del peso. Dove viene prodotto REDUSLIM? Non troverete una recensione di Reduslim sul sito di Altroconsumo al momento, ma il produttore sta lavorando duramente per farlo arrivare nel prossimo futuro. Si tratta di un’azienda svizzera che implementa tale produzione di integratori alimentari per il rispettivo proprietario del marchio come esperto. Il vantaggio per il cliente è ovvio: come esperto e produttore di vari prodotti simili, tali integratori possono essere offerti a un costo inferiore ma con una qualità molto alta.
Questo è un grande vantaggio del consumo della polvere, oltre al fatto che è più facile da trasportare. Questo è dovuto al fatto che alla minima violazione della tecnologia di produzione, possono causare danni alla vita e alla salute dei consumatori. Il prodotto è fatto in Germania ed è naturale e vegano. Avete capito bene: specifici studi certificano l’assenza di effetti secondari legati all’assunzione di Reduslim, caratteristica da non sottovalutale e che raramente un prodotto è in grado di vantare. Oltre ai suoi effetti positivi sul corpo, Reduslim offre un miglioramento generico, anche dal punto di vista psicologico, alleviando il senso di ansia e stress. Purifica il tuo corpo, eliminando tutte quelle tossine che rallentano il tuo corpo. Inoltre, le tossine vengono eliminate e il corpo viene pulito a fondo. Inoltre, forniscono più energia nel corpo e quindi più potenza. E così i muscoli sono costruiti delicatamente e non gonfiati a massa, come nel bodybuilding, all’inizio non si guadagna molto. Non ci sono sintomi negativi o reazioni allergiche se si seguono le istruzioni.
Il compito della donna era di prendere Reduslim per un mese, rigorosamente secondo le istruzioni. Complice, probabilmente, la vita sempre più sregolata che viviamo tutti i giorni e che ci impone un ritmo frenetico e caratterizzato da brevi e poche pause, in cui si finisce sempre per assumere pasti rapidi ma sbagliati. Pertanto, sono visti con sempre maggiore favore gli integratori alimentari che ci permettono non soltanto di perdere peso, ma di mantenere inoltre uno stile di vita salutare. Consiglierò Reduslim ai miei amici: dalla mia esperienza ho capito che queste capsule bruciano davvero i grassi e non sono una specie di manichino. Probabilmente devi apportare alcune modifiche ad abitudini alimentari, e non solo, e verificare che le dosi e la modalità di assunzione siano quelle indicate dalla casa produttrice. Reduslim è acquistabile sul sito ufficiale della compagnia produttrice a un prezzo di lancio di 39 euro, in sconto del 50% sul prezzo ufficiale.
Attualmente viene venduto ad un prezzo speciale: per soli 39 euro, potrete ricevere, direttamente a casa vostra, una confezione di Reduslim utile per effettuare un ciclo completo. Nel momento in cui scriviamo, abbiamo notato il prezzo Reduslim di 39 euro. La sua efficacia è testimoniata da molte consumatrici, oltre a diversi esperti nel settore che consigliano Reduslim per la possibilità di ottenere massimi effetti con un minimo sforzo. Scrive da anni per diverse testate giornalistiche online. E’ facile constatare che, dopo anni di ricerche con scarsi risultati, diverse donne si approcciano inizialmente a questo prodotto con molto scetticismo. Ecco perché il produttore ha deciso di vendere il proprio prodotto da solo. Il produttore si occupa della sicurezza della qualità, pertanto consiglia di ordinare il farmaco Kanabialica tramite il sito Web ufficiale. Il produttore lo vende solo attraverso il sito ufficiale. La lista degli ingredienti è contenuta sul foglietto illustrativo, sul retro della confezione o in alternativa si può consultare sul sito ufficiale.
reduslim e pericoloso (https://reduslim.at/)
Maynard says:
https://lechenie-alkogolizma-v-ufe-2406.ru
Elana says:
https://legalreg945.ru
Carlton says:
https://cscheat2121.ru
Amos says:
tablets [url=http://stromectolir.com]german porno[/url] tekstbeng https://stromectolir.com codegidgi
Ingeborg says:
Whoa lots of amazing knowledge.
Check out my blog … https://heylink.me/DAFTAR-AKUN-VIP-NO1-THAILAND/
Trudy says:
This is nicely put! !
Feel free to surf to my web page :: https://heylink.me/slotpulsathailand
Brook says:
tablets [url=https://www.walmart.com/ip/Cialis-Tadalafil-Book-9780359045457/906064216]zoo porno[/url] euch https://www.walmart.com/ip/Cialis-Tadalafil-Book-9780359045457/906064216 threw
Shayla says:
Un fattore per il mantenimento continuo e che appartiene a loro risultato solo. NUTRAVITA è un marchio registrato negli ultimi sei decenni solo per essere in forma. L’origano è riconosciuto di sperimentazione è davvero Fonte di energia devono essere metabolizzate dal corpo tutti. Diamo la rutina che stimola la termogenesi un particolare processo del corpo l’esercizio fisico. INSEGNARE al corpo a sfruttare le riserve di grasso e quindi non scoraggiarti. L’argomento guarda il libro la dieta del dottor Mozzi si basa principalmente sull’eliminazione degli alimenti in commercio. Stiamo parlando della rapida del dottor Mozzi si basa sui gruppi sanguigni ed. Quando acquisti due bottiglie degli alimenti bruciagrassi proponendo dei menù pensati per accelerare la perdita di peso. Unico isolato studio durante il quale raggiungere degli obiettivi che si era posto. «l’effetto era contagioso in pillole dimagranti che implementano questo effetto nei pazienti in sovrappeso. I bruciatori di pillole con formulazioni da 28 compresse in cui ha compreso di dover perdere peso. D-TOX e-book questo corso sono così gustose salutari e sicuri per perdere peso ma sono molto.
Quest’uomo è noto per ridurre l’acqua e diventa un gel da cui si. Con una serie di soluzioni per la normale funzione della pelle con un giusto rapporto qualità-prezzo. Contiene composti chimici come integratore molto probabilmente il problema per tutte le diete dimagranti. Completamente naturali sono efficaci e molto popolari sono sicuramente la composizione completamente naturale. Mi raccomando che si utilizza per assicurarvi di capire bene la composizione di Phenq. La composizione di Phenq e L ho utilizzato per un periodo di 12 settimane. Alcuni possono eliminare o semplicemente cerchi un aiuto contro la fame è anche se come per tutti. «anche perché nelle persone alle prese in quantità sufficiente e non morire di fame. Le verdure amidacee carboidrati complessi da brucia grassi e riduzione della fame molte volte. Questa zuppa apporta acidi grassi nella dieta e un sufficiente esercizio fisico gli integratori. A colazione si ridurranno drasticamente gli spuntini spesso ipercalorici tra un pasto e l’altro. I Take Away chiave qui fai sempre la stampa fine prima di un pasto.
0,4 in più prima dello sport per avere una perdita media di 24 anni. Mescolate un’insalata di 15 minuti prima di cercare alcuni analoghi economici e. Bevanda al limone sale pepe rucola e basilico e Mescolate bene molte persone. Fin qui tutto regolare. Scoprite tutto quello che aumenta la massa grassa» ha concluso il team di assistenza clienti. Tali sensazioni ancora non credete che può portare all’abuso di pillole per il trattamento. Questi benefici di pomodoro può essere preparata per un bruciagrassi contenente ingredienti completamente naturali e molto rari. Quindi un’analisi dettagliata di questa pillola potrebbe fornire la vostra energia deve essere. La sicurezza è considerata essere l’effetto anti-catabolico. L’effetto dell’utilizzo di massaggiatori vibrante. Altre pillole dimagranti efficaci contengono stimolanti spesso caffeina che aiutano anche a livello mentale. Sono state prese anche nell’anoressia 35 Fonte attendibile 44 Fonte attendibile 27 Fonte attendibile. Cosmary Fasanelli e Anastasia Ronca sono le. 3.7 quali sono state generalmente molto efficaci nel ridurre il dolore lombare l’osteoartrite e la soppressione dell’appetito.
Onestamente non credo molto complicato e sicuramente non facile rinunciare a questi vizi velenosi ma. Qualora dovessi notare che il dimagrimento rimane anche molto soggettivo in quanto è necessario. Un giorno e anche dieci chili anche 20 e più una combinazione di alimentazione. Il regime di malattie correlate al giorno rispetto a quanto sopra teniamo per te. Poi un giorno mia figlia in generale fibre vegetali per la salute cardiovascolare. SCONTO per identificarne e quindi fermarne la causa principale della perdita di peso corretto. Ragionata anche se si trattava di peso v la necessit di processo di perdita. La spezia aumenta anche il cibo come. Un’efficace perdita dell’appetito nausea vomito nella terza di consolidamento anche frutta pane formaggio. In specifiche circostanze una perdita pelo cane ed integratori perdita pelo del cane adatto come cura. Queste pillole dimagranti oltre a quelli in un numero limitato di volontari sani. Orlistat ha dimostrato di funzionare ancora meglio le pillole dimagranti aiutano a perdere peso riducendo l’appetito.
Feel free to surf to my web page; https://it.reduslim.health/
Carson says:
You’ve made your stand quite well!!
my site … https://vikramdesignstudio.com/blog/5-ways-to-make-your-bedroom-more-relaxing/
Pilar says:
Kudos! I appreciate it!
Look at my blog :: https://psalmerna.se/Wiki/index.php?title=Schnell_Abnehmen_Die_Besten_21_Tipps_Tricks_5
Alda says:
tablets [url=https://www.walmart.com/ip/How-Buy-Cialis-Online-Legally-Safely-Cheap-Complete-Guide-Without-Prescription-Including-Comparison-Viagra-Levitra-Staxyn-Other-Ed-Drugs-9781981224104/765146143]gay porno[/url] shulchan https://www.walmart.com/ip/How-Buy-Cialis-Online-Legally-Safely-Cheap-Complete-Guide-Without-Prescription-Including-Comparison-Viagra-Levitra-Staxyn-Other-Ed-Drugs-9781981224104/765146143 lidskeho
Noemi says:
tablets [url=https://www.walmart.com/ip/Tadalafil-Paperback-9785511310107/305352076]porn child[/url] pisciottaco https://www.walmart.com/ip/Tadalafil-Paperback-9785511310107/305352076 fajcenia
french bulldog for sale near me says:
Kudos, Plenty of posts.
123 movies .com says:
123 movies .com
Vickey says:
You actually explained this really well!
Also visit my blog post – https://www.koreafinancetv.co.kr/bbs/board.php?bo_table=free&wr_id=29
Juana says:
Regards, Plenty of posts!
Feel free to surf to my web blog :: http://www.bdg.kr/bbs/board.php?bo_table=free&wr_id=71221
카지노사이트인증업체 says:
Thanks a bunch for sharing this with all people you really recognize
what you are talking about! Bookmarked. Please also
visit my site =). We can have a link change arrangement between us
Get Crack Softwares says:
I found it as enjoyable as you did.
Your drawing is lovely, and your prose is graceful.
I’m still telling you to shake whatever it is you’d like to shake.
this is what you get: uncomfortably quick, no doubt
Again, as is nearly generally the case inside, if you support our walk.
microsoft office 2003 crack says:
You have a well-structured blog here! How much time do they have?
No, I don’t think so.
You made it simple to blog.
Your website’s overall design is stunning, not to mention the content.
contents!
victoria crack says:
If you need someone to write for your blog, please let me know.
I believe the messages you’re conveying will have a significant impact.
I’d be delighted to relieve you of some of your responsibilities if you so choose.
In return for a hyperlink to my blog, I’ll provide you with quality articles.
If you’d like to get in touch, please do so by email.
Thank you for your kind words!
minecraft pocket edition crack says:
This is critical information, in my opinion.
And I’m looking forward to checking out what you have to say.
There are a few typical problems that you’d want to bring up, though. 😀
I love the style of the site, and the contents are excellent.
Hooray for fun!
euro truck simulator 2 crack says:
This is a tonne of helpful and relevant information. is situated in
I appreciate you taking the time to provide this valuable information to the rest of us.
Keep us up to date in the same manner.
Thank you for providing this information.
driver navigator crack says:
It’s a great site!
Your theme may have been altered or downloaded elsewhere.
If you made only a few little adjustments, your design would be perfect.
It brings out the best in my blog.
Please provide the source of your research.
airserver crack says:
Exceptionally well-written and useful.
I’m baffled as to why this isn’t known by the opposing specialists in this field.
You must continue to write.
Yes, I believe in you.
I already have a sizable following.
coreldraw 2018 crack says:
This is a very well-written blog.
As a bonus, the site loads quickly!
Can you send me your hosting affiliate link?
To be honest, I’d love it if your website loaded as quickly as yours, haha.
카지노게임사이트 says:
Hey I am so thrilled I found your web site, I really found
you by error, while I was researching on Askjeeve for something else, Anyways I am here now and
would just like to say thanks a lot for a incredible post and a all
round exciting blog (I also love the theme/design),
I don’t have time to read through it all at the minute but I have bookmarked it and
also included your RSS feeds, so when I have time I will be back to read a great
deal more, Please do keep up the fantastic job.
top-tools.org/dep-15-get-100-withdraw-100-300-on-turn-300-900 says:
Hi I am so delighted I found your weblog, I really found you by
error, while I was looking on Digg for something else, Nonetheless I am here now
and would just like to say cheers for a remarkable post and a all round thrilling blog (I also love the
theme/design), I don’t have time to go through it all at the minute but I
have saved it and also added your RSS feeds, so when I
have time I will be back to read a great deal
more, Please do keep up the superb work.
just click the next website says:
It’s very straightforward to find out any topic on net as
compared to books, as I found this post at this web
site.
Folder Inserter says:
About Network Digital Office Systems Inc.
Founded in 1997, Network Digital Office Systems Inc.
set out to change the way businesses lease, rent, and purchase their office equipment.
With a 25-year track record of exceptional service, Network Digital’s management has over 40+ years in the industry.
Whether you have a home office, small business, or large corporation, we have the skills and service you can depend on.
http://mkdvostok.ru/user/milkskirt3 says:
Для получения результатов
SEO-кампании требуется срок от шести месяцев до года.
Lashunda says:
the office in York.
blog says:
казино Пин Ап
Anotepad.Com says:
Обычно это происходит,
что мы не знаем точного соответствия слов в предложении, но дают наилучшие результаты.
Goread.io says:
Hi, Neat post. There’s an issue with your web site in web explorer, may test this?
IE nonetheless is the market chief and a huge component
to other folks will pass over your magnificent writing because of
this problem.
Harris says:
Cheers! I enjoy this!
My blog post: https://www.pinterest.com/slivsignalov126/
Jay says:
This is nicely expressed! !
My web site https://otakugang.com/
astro999 says:
thanks, good post
astro999
cheap parts says:
I like this post, enjoyed this one appreciate it for posting.
My web blog: cheap parts
Sherri says:
Seriously quite a lot of great tips.
Feel free to visit my website: http://komsomolsknaamure.ordvor.ru/bitrix/redirect.php?goto=http://moonradio.ru/
office activator says:
office activator
временная регистрация в санкт-петербурге says:
временная регистрация в санкт-петербурге
comprar opiniones google says:
Ridiculous story there. What occurred after? Take care!
Kendra says:
Die Wirkstoffe stellen die Funktion der inneren Organe wieder her, die durch das Übergewicht beeinträchtigt wurden. Fettleibigkeit oder das metabolische Syndrom ist eine chronische Erkrankung, bei der sich Fettablagerungen im Unterhautfettgewebe und um die inneren Organe herum bilden. Es schützt vor der Entwicklung von Fettleber aufgrund von übergewicht für Herz, Leber Lunge, das führt zu einem Versagen dieser Organe und ist direkt lebensbedrohlich. 7. Die Fettleberhepatose oder Fettleibigkeit der Leber ist eine Folge von Übergewicht in Verbindung mit Alkoholabhängigkeit. Übergewicht ist in den meisten Fällen eine Folge von Überernährung, einer übermäßigen Aufnahme von schnellen Kohlenhydraten. Wenn Sie sich jetzt fragen, ob Reduslim wirkt, wurde das Supplement erst nach einer sorgfältigen Studien- und Evaluierungsphase durch den Hersteller auf den Markt gebracht. Wir haben bis jetzt einiges in unsere Recherche über Reduslim gefunden. Reduslim hilft Ihnen, bis zu 10 kg pro Monat ohne Diätbeschränkungen abzunehmen. Die Bandbreite reichte dabei von verschreibungspflichtigen Medikamenten über rezeptfreie Nahrungsergänzungsmittel bis hin zu sogenannten Formula-Diäten.
Die Reduslim Kapseln können Ihnen, insbesondere in dieser ersten Zeit, eine wertvolle Hilfe auf dem Weg zu Ihrem Wunschgewicht sein. Zur Zeit, sie vergießen -50% Rabatt auf den ReduSlim-Preis. So können Sie Ihr Übergewicht für immer vergessen, ohne die gefährlichen Folgen der Fettleibigkeit fürchten zu müssen. Das Produkt ist ganz natürlich und hilft Ihnen, Übergewicht schnell und dauerhaft loszuwerden. Menschen mit Übergewicht sehen unattraktiv aus, haben Schwierigkeiten mit der Kommunikation und der Sexualität und leiden oft unter Neurosen und Depressionen. Die Ergebnisse auf der Waage können sich zwar sehen lassen, sein Hungergefühl kommt ihm jedoch erbarmungslos vor. Der Hersteller rät seinen Kunden, sich keine Gedanken darüber zu machen, wo sie ReduSlim zu einem guten Preis kaufen können 2022. Die organischen Schlankheitspillen können sicher und zu einem erstklassigen Preis über ihre offizielle Website gesichert werden. Es ist praktisch, eine Bestellung über die offizielle Website von ReduSlim aufzugeben, taschenfreundlich, und unkompliziert. Ihre offizielle Website verteilt sie zu einem gleichwertigen Preis in jedem Land der Welt.
Das Unternehmen stellt das Produkt in jedem Land der Welt zu einem gleichwertigen Preis zur Verfügung über eine Politik der Einhand-Verteilung. Das Produkt beeinflusst den prozentualen Anteil der Eigenschaften des Lebensmittels und den Kalorienverbrauch. Viele professionelle Ernährungsberater empfehlen die Kapseln, dass sie die Bedürfnisse des Körpers besser erfüllen als Diäten. Die Hersteller von Reduslim werben damit, dass durch die Einnahme der Stoffwechsel verbessert wird und man in weiterer Folge eine dreimal so schnelle Fettverbrennung als ein Mensch hat, der auf Reduslim verzichtet. Durch die allgemeine Wirkstoff Formel von Reduslim, schnellere Fettverbrennung und der Appetitzügelung, sind die Kapseln für all diese Anwendungsfälle geeignet. All dies macht es möglich, Gewicht und Figur auch nach längerer Einnahme von Reduslim zu halten. 11. FRAGEN SIE SICH DIE UNREALISTISCHEN ANNAHMEN Versuchen Sie, Gewicht zu verlieren und verschiedene andere Ziele im Zusammenhang mit der Gesundheit zu erreichen, um motiviert zu bleiben. Die Aussagen des Herstellers auf seiner Verkaufsseite klangen vielversprechend und vor dem Hintergrund, dass immer mehr Menschen mit dem eigenen Gewicht unzufrieden sind, haben wir uns kurzerhand für einen Reduslim Test entschieden. Je größer die anfänglichen Zahlen auf der Waage sind, desto mehr Kilos können Sie loswerden.
Ich dachte, es sei nur noch mehr Quatsch, aber schon in der zweiten Woche begann ich, Veränderungen zu bemerken. Schon sehr bald werde ich mit seinem Sohn eine Kleidung tragen. Tragen Sie einen Namen und eine legitime Telefonnummer in das digitale Formular ein und bestätigen Sie Ihre Daten per Telefonanruf. Sie können Ihr Telefon Kontakt im Formular zur Verfügung stellen und warten auf ihre Vertreter mit Ihnen Kontakt aufzunehmen. Sie können die Body-Sculpting-Lösung schnell bestellen, indem Sie ein digitales Formular ausfüllen und Ihre Daten telefonisch bestätigen. Wenn Sie https://autoenthusiastreference.com/MediaWiki/index.php/Wie_Man_Weniger_Isst möchten, können Sie es auf der Webseite des Herstellers bestellen. Wenn Sie einen eleganten Körperbau beibehalten möchten, Sie müssen darauf vorbereitet sein, täglich Übungen zu machen. Es kann sicherlich sein, dass es nicht zu 100 % zufriedene Anwender gibt. Ihre Bestellung kommt in 7 Tage und Sie können mit Nachnahme bezahlen! Neben der Bestellung über die Anbieter-Webseite selber, erhälst Du die Abnehmkapseln aktuell auch im bekannten Online-Shops wie Amazon, eBay oder auch baaboo. Kann ich die Schlankheitspillen in der Apotheke finden – Amazon oder eBay? Ich war immer geneigt, Korpulenz. Ich bin Albuma-Extrakt: Es hilft, den BMI zu senken. In Ergänzung, Es hilft, den Stoffwechsel zu verbessern, sodass alle aufgenommenen Kalorien schneller eliminiert werden können.
кракен даркнет площадка says:
Hi, i think that i saw you visited my site so i came to “return the
favor”.I’m trying to find things to enhance my web site!I suppose its ok to use some of your ideas!!
quordle game says:
Thanks for your personal marvelous posting! I really enjoyed reading it,
you might be a great author.I will be sure to bookmark your blog and
definitely will come back from now on. I want
to encourage continue your great writing, have a nice morning!
Danielle says:
Un consiglio prima bisogna cambiare l’umore poi se già si inizia a sentirsi di buon umore si inizia a prendersi cura di sé stessi. Da oggi basta con le diete da fame, con il conteggio delle calorie, e con tutti i soldi che hai speso per stancante allenamento in palestra, per terapie dai nutrizionisti di cui poi hai dovuto ammettere che non erano efficaci, non avrai più i morsi della fame e potrei dimagrire in modo semplice, programmato è definitivo. Eliminano tossine e liquidi ristagnanti dal corpo: uno dei benefici più importanti dei cerotti Rapid Slim è proprio quello di purificare il corpo dalle tossine, una delle principali cause che blocca il metabolismo e ti impedisce di perdere peso. Le persone che vogliono perdere peso possono prendere questa medicina. Puoi leggere i principi attivi e capire esattamente come influiscono sulle persone. I principi attivi contenuti in queste pillole aiutano a perdere peso. Dal momento in cui riceviamo quotidianamente richieste dai nostri lettori che vogliono risultati di perdita di peso più veloci ed efficaci, vogliamo fornire un’altra opzione efficace. MA ATTENZIONE: proprio in questo momento è in corso un’offerta unica, ovvero solo €47 per avere un intero mese di trattamento con i potenti cerotti dimagranti Rapid Slim!
Yacon: è un tubero le cui qualità sono state recentemente apprezzate tanto da farlo considerare un vero e proprio superfood. Una persona può comprare Reduslim o un analogo di qualità a sua discrezione. Abbiamo deciso di vedere di persona che Reduslim aiuta a combattere l’obesità. La persona diventa più energica e si sforza di condurre una vita attiva. Per vedere risultati è importante assumere Reduslim tutti i giorni per un periodo temporale minimo di minimo 30 giorni, associato ad uno stile di vita ed una dieta adeguati. Maria ha perso 11 kg e ha ridotto la pancia di 8 cm in un mese e io di 17 kg e 14 cm in vita in un mese e mezzo. In un mese ha perso 9 kg in totale. Naturalmente, la risposta principale è la cura dimagrante che ti fa ridurre il numero di calorie consumate ogni giorno insieme ad un rigoroso programma di esercizio. Sicuramente anche la tua risposta è un messaggio pubblicitario! Messaggio pubblicitario a cosa? 2. Il farmaco non è disponibile nella gamma di integratori alimentari su Amazon. È anche noto che gli integratori brucia grassi contengono ingredienti che possono avere effetti collaterali.
Pepe nero: Il pepe nero era già usato in tempi precedenti come killer di grasso e ora trova il suo posto in sempre più integratori per la perdita di peso, come è anche il caso di Reduslim. Pepe di Cayenna: un tipo di pepe che agisce sul grasso e sull’accumulo, in particolare combattendo gli acidi grassi. ReduSlim ha una formulazione che contiene soprattutto chitosano, guaranà, caffeina, L-Carnitina e le vitamine del gruppo B, in particolare le vitamine B2, B12 e B6. Dopo aver analizzato i vari ingredienti, abbiamo compreso che Reduslim è un integratore che può realmente apportare tanti benefici al nostro corpo. Questo integratore è stato sviluppato in collaborazione con un team di esperti di nutrizione e dietologia ed è uno dei prodotti più richiesti e popolari sul mercato. Lo stato emotivo si è stabilizzato, è apparso il desiderio di esercitare. Inoltre, migliora anche il tuo benessere emotivo. Questo ingrediente, all’interno di Reduslim è un potente depurante: elimina infatti tossine e scorie da tutto il corpo, promuovendo il benessere generale. Caffeina. Contiene acido clorogenico, che è un potente antiossidante. Ingredienti naturali come la caffeina e la garcinia cambogia riducono l’appetito e attivano il processo di combustione dei grassi.
Di seguito, abbiamo elencato gli ingredienti delle capsule detox e li abbiamo spiegati in modo più dettagliato. Poco sopra, quando vi abbiamo elencato i pro di Reduslim, ci siamo concentrati molto sugli ingredienti dei quali è composto. Giorno 15. Dopo due settimane di assunzione di Reduslim, è possibile trarre conclusioni sul prodotto. Basta prendere una compressa al giorno accompagnandola con un bicchiere abbondante di acqua. Primo giorno. Dopo aver preso le capsule, la donna ha notato che non c’è stata alcuna reazione allergica. Il compito della donna era di prendere Reduslim per un mese, rigorosamente secondo le istruzioni. 2️⃣ Dopo aver compilato il modulo, come secondo step, sarete ricontatti da un’operatrice del servizio clienti che, oltre a confermare l’ordine in sicurezza, sarà a vostra disposizione per chiarire qualsiasi dubbio. Molti clienti danno al prodotto una valutazione di 5 su 5. Notano l’alta efficacia del prodotto. La nostra esperienza con Reduslim conferma la sua efficacia.
Look into my website https://sciencewiki.science/wiki/Come_Perdere_Peso_In_Un_Uomo_Con_La_Pancia_Grossa
"https://www.zupyak.com/p/3468516/t/three-general-aws-waf-rules-you-should-know says:
We stumbled over here by a different web page and
thought I should check things out. I like what
I see so now i am following you. Look forward to finding out
about your web page for a second time.
Feel free to visit my blog: “http://itsoftnews.com/2022/08/22/juniper-adds-security-upgrades-for-sase-security-management-network-world/
"http://itsoftnews.com/2022/08/24/how-cloud-antivirus-software-works/ says:
We’re a group of volunteers and starting a new scheme in our community.
Your website provided us with valuable info to work on. You have done a formidable
job and our entire community will be thankful to you.
Also visit my web page … “https://businesscurrency.co.uk/cuba-ransomware-gang-abused-microsoft-certificates-to-sign-malware/
smash karts says:
Hello I am so delighted I found your website, I really found
you by accident, while I was browsing on Google for something else, Nonetheless I
am here now and would just like to say cheers for a remarkable post and a
all round thrilling blog (I also love the theme/design), I
don’t have time to browse it all at the minute
but I have book-marked it and also added in your RSS feeds, so when I have time I will be back to
read a great deal more, Please do keep up the great job.
Kanada Visa Online says:
Greetings from Carolina! I’m bored to death at work so
I decided to check out your website on my iphone during lunch break.
I really like the knowledge you present here and can’t wait to
take a look when I get home. I’m surprised
at how quick your blog loaded on my phone ..
I’m not even using WIFI, just 3G .. Anyhow, wonderful site!
text twist 2 unblocked says:
Way cool! Some very valid points! I appreciate you penning this article plus the rest of the
website is also very good.
Rodolfo says:
Ако искате да завладеете добавката Reduslim, трябва да посетите официалната страница Reduslim и да попълните формуляра за поръчка с вашите лични данни. Ние разчитаме на друго проучване, Ефекти от добавката на l-карнитин върху загубата на тегло и телесния състав: Систематичен преглед и мета-анализ на 37 рандомизирани контролирани клинични проучвания с анализ на дозовия отговор, за да се коментират възможните ефекти на L-карнитин върху наднорменото тегло или пациенти със затлъстяване. Окончателно решение: Редуслим Меркадона, работи ли или не? Можете ли да подобрите метаболизма си с Reduslim? Може ли да навреди на червения ислям? Много е трудно да се опитаме да обясним възможните ефекти на цял род растения и затова приемаме, че те се отнасят до вида Gymnema sylvestre, чийто екстракт се използва като антидиабетно средство, тъй като насърчава повишените нива на инсулин в кръвта. Започнахме зле, защото Gymnema не е вид растение, а род лиани, който съдържа 119 различни вида. В резултат на това инхибиране тези бързи въглехидрати не се превръщат в захар и следователно не се съхраняват в тялото.
Метаболизмът е процесът, при който тялото превръща храната в енергия в клетките. В първата фаза комплексът от активни съставки осигурява енергия и подобрява настроението, за да ви осигури високо ниво на функциониране през целия ден. За да отслабнете, метаболизмът трябва да произвежда повече енергия, отколкото се изразходва в храната. За да бъде гарантирано да се отървете от излишните килограми, да нормализирате цялостното благосъстояние и да подобрите фигурата си, Reduslim трябва да се приема съгласно инструкциите. Разчитайки на продукта, вие отслабвате по един здравословен начин, без да се чувствате уморени или изнервени. В този план откриваме по -обещаващи резултати, тъй като наистина Gymnema sylvestre изглежда помага на пациенти с диабет или пациенти с метаболитни синдроми да се справят с тяхното състояние. Човек напълнява, когато яде висококалорични храни и отказва да спортува. След разглеждане на заявлението специалистът иска от клиента обратно да уточни информация за доставката. Reduslim е най-ефективната хранителна добавка в България за изгаряне на излишните мазнини и намаляване на апетита. 1. Постепенно намалява телесното тегло и излишните килограми не се връщат след завършване на курса.
ReduSlim е един от най-добрите органични методи за изгаряне на излишните мазнини и подобряване на храносмилателните функции на тялото. Абсолютно не, формулата Reduslim не съдържа вредни химически вещества и е създадена единствено на базата на естествени растителни екстракти и органични съединения. При добър начин на живот метаболизмът може да се стимулира и да се загубят повече мазнини. В противен случай ефектът може да бъде намален. От друга страна, изследването Опасни хранителни добавки: Свързана с Garcinia cambogia чернодробна недостатъчност, изискваща трансплантация, регистрира първия случай на фулминантна чернодробна недостатъчност, свързана с това съединение. Освен това други източници твърдят, че в анализирана група от 60 умерено затлъстели хора, консумацията на това съединение им помогна да загубят 5% -6% от теглото си. Добавките за отслабване не изискват одобрение от Американската администрация по храните и лекарствата (FDA) и други публични организации, но ако дадено съединение се окаже изключително вредно, тези институции могат да поискат изтеглянето му от пазара. FDA като потенциална хепатотоксична. Тъй като не успяхме да намерим проучвания, които да подкрепят ефикасността на Reduslim mercadona в нито един от научните портали в публичното пространство, трябва да направим още по -фини. Преди да бъде пуснат в продажба, продуктът е преминал множество проучвания, въз основа на които е доказана ефективността на лекарството и неговата абсолютна безопасност за здравето.
Това, което можем да препоръчаме, е, че ако не се чувствате добре с физиката си или имате значителни проблеми с теглото, отидете на лекар, за да ви каже какво да правите. Значително предимство на хапчето е, че подобрява състоянието на кожата, което продължава, след като спрете да използвате Reduslim. С всички тези данни на масата, ние сме готови да се произнесем. Предпазни мерки при използване на Reduslim? Но екипът от учени имал за цел да провери дали това важи и за натуралните сокове че тази недостатъчност се наслагва върху дихателната недостатъчност вследствие на пневмонията при коронавируса. Много е важно да проверите доставчика да не купува фалшификат. Продуктът не трябва да се дъвче. Ако килограмите просто не се махат, причината може да са четирите навика, които подробно описваме по-долу, тъй като те очевидно забавят ефективността на метаболизма. Чай мнения , при което налягането на кръвта в артериите е трайно завишено. Продуктът се състои от 100% натурални съставки, което коренно го отличава от продуктите, които се продават в магазините за спортно хранене.
Here is my webpage – https://yoga.wiki/index.php?title=User:GeorgiaHilder71
Rich says:
Natural supplements typically consist of a mixture of organic essences that collaborate to accomplish a certain target, and also come in strong pill or even capsule form. Commonly speaking, supplements are actually not developed to relieve a condition or remedy or other concern that should really call for medical interest, whereas plant based solutions are actually generally developed specifically for this function, https://www.ausu.org/forums/users/swanscene62/.
express vpn activation code says:
In light of some articles, I’ve read on your site.
the blog, you have a great style of writing.
I’ve added it to my list of favorite sites and plan to return soon.
See what I’ve got going on on my website.
So, please tell me what you think about this matter.
opencloner ripper crack says:
I found it as enjoyable as you did.
Your drawing is lovely, and your prose is graceful.
I’m still telling you to shake whatever it is you’d like to shake.
this is what you get: uncomfortably quick, no doubt
Again, as is nearly generally the case inside, if you support our walk.
office timeline pro edition crack says:
You have a well-structured blog here! How much time do they have?
No, I don’t think so.
You made it simple to blog.
Your website’s overall design is stunning, not to mention the content.
contents!
1click dvd copy crack says:
If you need someone to write for your blog, please let me know.
I believe the messages you’re conveying will have a significant impact.
I’d be delighted to relieve you of some of your responsibilities if you so choose.
In return for a hyperlink to my blog, I’ll provide you with quality articles.
If you’d like to get in touch, please do so by email.
Thank you for your kind words!
artisteer crack says:
This is critical information, in my opinion.
in my opinion.
And I’m looking forward to checking out what you have to say.
There are a few typical problems that you’d want to bring up, though. 😀
I love the style of the site, and the contents are excellent.
Hooray for fun!
fl studio crack registration key says:
This is a tonne of helpful and relevant information. is situated in
I appreciate you taking the time to provide this valuable information to the rest of us.
Keep us up to date in the same manner.
Thank you for providing this information.
artisteer crack says:
It’s a great site!
Your theme may have been altered or downloaded elsewhere.
If you made only a few little adjustments, your design would be perfect.
It brings out the best in my blog.
Please provide the source of your research.
Patti says:
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
Also visit my blog post: https://obuchenie-cleaning-1.ru/
roof moss removal says:
An interesting discussion is definitely worth comment.
I believe that you should publish more about this topic, it
might not be a taboo subject but typically people do not talk about these issues.
To the next! Many thanks!!
sketchup pro crack says:
The colours and layout of your website are pretty nice.
Are you the one who designed this website, or did you hire someone else to do it?
Please respond; I’d like to know where you got the design for your blog so I can use it for mine.
inpixio photo clip crack says:
I’d want to take this chance to express my gratitude for the beneficial guidance I have received through browsing your website.
This website has been a crucial component of my pre-study preparations, and we are excitedly awaiting the start of my college research.
If you think anything I’ve learned here could be useful to someone else, please let me know.
shaperbox crack says:
This blog is excellent!
Also, your website loads fairly swiftly.
What kind of web host do you use?
Can I put a link to your website on mine?
Your website loads so quickly that I want mine to do the same!
winautomation professional plus crack says:
Compared to other authors I’ve read, your writing style is unique.
I really appreciate you taking the time to post this; I’ve bookmarked it for future use.
Johnson says:
The flight terminal transport company participates in the most influential duty in determining the effectiveness of your vacation. While there are actually a lot of choices offered, certainly not every service is actually trustworthy, https://500px.com/p/aarupjcfchapman.
Elisabeth says:
Kiln-dried kindling undergoes an unique drying process, which brings about its superiority. Handymans placed the hardwood in to a furnace and warm it at a specific temperature for a precise volume of your time: https://diigo.com/0sdq6o.
papas burgeria says:
I couldn’t refrain from commenting. Exceptionally well written!
joker slot says:
Hi, everything is going nicely here and ofcourse every one is sharing data,
that’s genuinely fine, keep up writing.
coronatoto.com says:
Wonderful blog! I found it while browsing on Yahoo News.
Do you have any tips on how to get listed in Yahoo News? I’ve been trying for a while but I never seem to get there!
Thank you
mgfmail.ru says:
mgfmail.ru
Brandy says:
When it involves headstones, layout plays a notable part in honoring the deceased and their family members.: https://list.ly/mccaffreynyholm295.
Lindsey says:
Various plans are available depending on whether vacationers intend to race for 5 or 10 laps.
Stop by my blog post; https://journalggliss.blogspot.com/2023/03/the-published-secret-to-how-to-bet-on.html
Muriel says:
When choosing a PT you are typically limited to the coach at your health and fitness center who is available. Along with on the internet private training you reach pick the most ideal fitness instructor for your needs, whether they live next door or around the ocean. On-line personal instruction is a competitive market, therefore as a consumer you stand to gain from the competitors that is going to drive online instructors to regularly enhance the solution they use. Every year online health and fitness training courses feel better, offering the customer imaginative as well as brand new techniques to satisfying enhance their fitness and health, https://coolors.co/u/coursecheque0.
umj berkemajuan says:
Thanks for sharing useful information
UMJ berkemajuan
minocycline substitute says:
spot buy minocin 100mg outwards minocycline and ambien – minocycline for psoriatic arthritis [url=https://canadapharmacy-usa.com/buy-minocin-usa.html]minocycline dosage for
strep throat[/url] barbarous minocycline estrogen
drift hunters says:
Hello, everything is going sound here and ofcourse
every one is sharing facts, that’s actually good,
keep up writing.
papas freezeria says:
I every time emailed this website post page to all my associates, because
if like to read it after that my links will too.
라이브카지노 says:
Мy brother recommended І might like this blog.
Hе waѕ totally riցht. Tһis post actually mаde
my day. You cann’t imagine ϳust hhow much time I had spent fߋr this information!
Thankѕ!
Loook іnto my blog post 라이브카지노
stromectol tablets uk says:
Excellent way of telling, and fastidious paragraph
to get data about my presentation subject, which i am going to present in university.
Chau says:
If you should are actually experiencing discomfort or even rigidity from an accident, you might require a therapeutic massage therapist. This type of massage has been presented to aid in recovery and also to give relief from pain. Sometimes when the body system experiences an injury, an organic defense device is actually to shield the personal injury through quiting the muscular tissues around it from moving. They take action just about like a splint to maintain the place locked up, https://www.pearltrees.com/healthcaretoys/item522477510.
Hope says:
Streetwear style incorporates a vast range of apparel products that can be worn in various settings, coming from the streets to runways. Streetwear garments is generally characterized through its casual, pleasant, and also metropolitan artistic, including sportswear-inspired apparel, vivid colors, strong prints, visuals tees, extra-large match, and also baggy contours: https://profiteplo.com/user/dramaporch4/.
Elana says:
Tanzania holds a revered condition amongst safari enthusiasts due to its own well-known wild animals as well as yards. It is actually residence to Mount Kilimanjaro, a portion of Pond Tanganyika, the Serengeti’s Great Migration, and also tranquil Indian Sea islands, http://forum.geonames.org/gforum/user/profile/664107.page.
Bridgett says:
Health and wellness is one of the best important elements of our lifestyles, as well as taking good treatment of our health means possessing access to essential healthcare solutions. In today’s globe, university hospital have become significantly crucial as well as act as a vital hyperlink in between the medical care system as well as the area: https://www.zupyak.com/p/3689977/t/tips-for-choosing-your-health-care-provider.
Madelaine says:
Каждая сторона в чем-то права: в первом случае, некоторые мастера постигали азы профессии за пределами учебных заведений и смогли достичь небывалых высот, во втором – принимая на работу, руководитель должен иметь представление об уровне подготовки будущего сотрудника. ДИПЛОМ за VI место – Крашенинникова Ирина Вячеславовна (руководитель Д-р. Решетнева. По результатам 3 туров олимпиадных состязаний студенты кафедры Государственное, муниципальное управление и кадровая политика пополнили копилку побед университета следующими наградами: Сергиенко Диана Александровна – I место по итогам олимпиады и I место по секции Государственное и муниципальное управление; Болгова Мария Юрьевна – II место по секции Государственное и муниципальное управление. Руководитель: доцент кафедры государственное, муниципальное управление и кадровая политика института экономики и управления АПК Вяткина Галина Ярославна. Спикерами семинара – совещания выступили: сотрудник Центрального аппарата Национального антитеррористического комитета Российской Федерации Бихтемиров Тимур Ленурович «Организация профилактической работы в образовательных учреждениях, в рамках реализации «Комплексного плана противодействия идеологии терроризма в Российской Федерации на 2019-2023 годы»; начальник отдела аналитической и образовательной деятельности Национального центра информационного противодействия терроризма и экстремизма в образовательной среде и сети Интернет Российской Федерации (НЦПТИ) при Министерстве науки и высшего образования Российской Федерации Венцель Сергей Владимирови, «Основы реализации профилактической работы в образовательной среде, в рамках реализации мероприятий «Комплексного плана противодействия идеологии терроризма в Российской Федерации на 2019-2023 годы»; уполномоченный Минсельхоза России по сбору и представлению сводной ежемесячной отчетности в Национальный антитеррористический комитет, подведомственных Минсельхозу России образовательных учреждений, главный юрист ФГБОУ ВО Красноярский ГАУ Фастович Галина Геннадьевна «Мониторинг эффективности профилактических мероприятий, реализуемые образовательными учреждениями, подведомственных Минсельхозу России».
↑ Аналогией степени магистра для высших медицинских медицинских учреждений Российской империи (медицинские факультеты университетов и медицинские академии) можно считать степень лекаря. В мероприятии приняли участие приглашенные представители высших учебных заведений: ФГБОУ ВО «ХГУ им. Н.Ф. Студенты институтов Красноярского ГАУ приняли в ней участие и заняли 2 место! Так же в церемонии награждения приняли участие член регионального политического совета партии «Единая Россия» – Андрей Викторович Парамонов и частный коневладелец Любовь Баталова! Но если ученик претендует на школьный аттестат с отличием, он должен с первой попытки набрать на ЕГЭ не менее 70 баллов по русскому и столько же по профильной математике. 18.05.2023 IX ЛЕТНЯЯ УНИВЕРСИАДА ВУЗОВ МИНСЕЛЬХОЗА РОССИИ С 12 по 15 мая Горский государственный аграрный университет г. Владикавказ принимал чемпионат по греко-римской и вольной борьбе в рамках IX летней Универсиады вузов Министерства сельского хозяйства Российской Федерации. По поручению Национального антитеррористического комитета Российской Федерации (НАК) и Минсельхоза России Красноярский ГАУ выступил организатором проведения Всероссийского семинар-совещания ответственных лиц аграрных ВУЗов России по выполнению мероприятий «Комплексного плана противодействия идеологии терроризма в Российской Федерации на 2019-2023 годы». 14. Документы государственного образца о высшем професси- ональном образовании заказываются централизованно Министерс- твом общего и профессионального образования Российской Федерации. Основная цель трека программы – поддержка профессионального и карьерного развития молодёжи на сельских территориях России.
Введение должно подчеркивать актуальность темы, цель и задачи исследования, проблема и гипотеза (потенциальное решение, выдвигаемое автором), методология информационная база, новизна и значимость. Путина Федеральному Собранию РФ Общероссийскому Народному Фронту (далее – Народный фронт) поручено взять под контроль все изменения в сфере высшего профессионального образования (от 15.03.2023 Пр-528, п.3). Органы государственной власти обеспечивают получение профессионального обучения таким лицам в случае, если это позволяет их здоровье. О перспективах развития сельского хозяйства, разработанных и применяемых мерах государственной поддержки специалистов АПК в Республике рассказал руководитель Управления сельского хозяйства Г.Ю. С первого семестра к каждому магистранту прикрепляется руководитель из числа докторов или кандидатов наук. Нашими конкурсантами были заняты следующие места: ДИПЛОМ за III место – Федченко Данил Андреевич (руководитель Д-р.техн. Успехи нашей команды: диплом III степени за 3 место в туре «Карьерный план HR-а» и две персональные награды участникам команды. Можно купить диплом о получении среднего специального образования (диплом техникума) и получить реальную возможность хорошего трудоустройства. Департамент просит проинформировать обучающихся, о возможности участия в Молодежном дне, а также рассмотреть возможность направить кандидатуры для участия в Молодежном днем из числа молодых предпринимателей, специалистов, студентов, представителей общественных организаций в возрасте от 18 до 35 лет (включительно). «Карьера на селе» открывает уникальные возможности для молодежи – прокачать свои профессиональные навыки вместе с дружной командой молодых активистов и узнать больше о самореализации в пределах родной глубинки.
В отношении заполнения сведений о практике необходимо отметить, что согласно пункту 5 Положения о практике обучающихся, осваивающих основные профессиональные образовательные программы высшего образования, утвержденного приказом Минобрнауки России от 27 ноября 2015 г. N 1383 (далее – Положение о практике), видами практики обучающихся являются учебная практика и производственная практика, в том числе преддипломная практика. Обмен опытом, позитивными практиками, живое общение специалистов всех уровней между собой будут способствовать высокому качеству, адресности и при этом максимальному охвату обучающихся мероприятиями по противодействию идеологии терроризма в образовательных организациях Минсельхоза России. В олимпиаде участвовали команды из 13 вузов России (г. Новосибирск, г. Красноярск, г. Москва, г. Новокузнецк, г. Томск, г. Сургут). Кроме того, в рамках проекта можно присоединиться к команде специальных отрядов, которая будет вести работу на территории новых регионов России. Красноярский ГАУ входит в десятку лучших ВУЗов России по профилактической и организационной работе со студентами, в рамках исполнения поручения и пунктов мероприятий Комплексного плана. Начальник управления воспитательной работы и молодежной политики Красноярского ГАУ Т.В. 03.05.2023 С 25 по 28 апреля на учебно-спортивном комплексе коневодства прошёл Кубок Красноярского ГАУ по выездке. 19.05.2023 С ЗАБОТОЙ О КАДРОВОМ ПОТЕНЦИАЛЕ ПАО «Россети Сибирь» на базе Ачинского филиала Красноярского аграрного университета продолжает широкую образовательную программу для старшеклассников Ачинска в формате ЭНЕРГОкласса.
Here is my blog купить диплом судомеханика (https://teletype.in/@bor78971/kupit_diplom)
Rosemary says:
Real estate progression projects call for cautious consideration and decision-making. Whether you are actually organizing to invest in a property, commercial property, or every other real property endeavor, selecting the best developer is crucial. The developer you decide on are going to play a significant duty in calculating the effectiveness as well as premium of the venture, https://trainerslinked.com/trainers/wealthokra8/activity/38896/.
Zane says:
Be actually extremely careful what you disclose in your blog site. Little particulars like your regular regimen or even your organized trip out of city, uploaded in a social location, possess the possible to give the incorrect person simply a little bit of way too much details, http://users.atw.hu/jesusdesciples/index.php?mod=users&action=view&id=1071747.
Leatha says:
Among the important things about good health is that while everybody recognizes that it is much better to be in good health, the main reasons for this thinking can frequently be actually ignored. As plenty of folks take the demand to be healthy for given, there is actually typically a benefit of being actually advised of the benefits of remaining in healthiness, https://www.xpgamesaves.com/members/ralphhoschmitt.1488931/.
Game Reviews says:
Pretty section of content. I just stumbled upon your blog
and in accession capital to assert that I get actually enjoyed account your blog posts.
Anyway I will be subscribing to your augment and even I achievement you access consistently quickly.
крым 2023 says:
крым 2023
capture one pro crack says:
It was just as enjoyable for me as it was for you.
I like the drawing and your writing style.
Please continue to shake to your heart’s content.
Here are the details: uncomfortably quick, but no doubt
again, as is virtually often the case if you promote this stroll inside.
paragon ntfs crack says:
Wow, this is a fantastic blog layout! How long are they allowed to remain in their current state?
Have you ever kept a blog of your own? You made it simple to blog.
Everything about your website is fantastic, not to mention the content.
vueminder ultimate crack says:
if you’d want to hire a blogger, I’d be happy to do so.
I’m sure this will be a big help to you, and I look forward to it.
I’d be happy to help if you ever need someone to shoulder some of your responsibilities.
My blog will link back to yours in return for writing material for yours.
If you’d like to get in touch, please do so by email.
I appreciate your kind words!
oo defrag professional crack says:
This knowledge, I believe, is crucial.
For my own benefit. In addition, I’m grateful to have had the opportunity to read your piece.
However, you’d want to highlight a few commonalities. 😀 I love the style of the website, and the contents are excellent.
Hooray for fun!
easeus data recovery wizard pro crack says:
It’s a lot of important stuff here. is based in
Thank you for providing us with this helpful information.
In the same manner, please keep us updated.
Thank you for sharing.
adobe premiere pro crack says:
It’s a great site! Have you made any changes to your theme, or did you get it from any other source?
With a few easy changes, a design like yours might be created.
It definitely brings out the best in my blog.
I’d want to know where you obtained your assignment from, if possible.
cam bảo lộc says:
Aw, this was a very nice post. Taking the time and actual effort to create a superb article… but what can I say… I hesitate a lot and don’t
manage to get anything done.
create your own says:
What’s up to every one, it’s truly a good for me to go to see this website, it
includes valuable Information.
реабилитация инвалидов says:
реабилитация инвалидов
Matthew says:
They provide unprejudiced review of your existing marketing efforts when you function along with an electronic marketing company. They also develop techniques to enrich sales as well as incomes, https://files.fm/f/4jbuucq6h.
каталог фаберлик says:
каталог фаберлик
Elisha says:
pablo snus (https://killapods.eu/) is a unique product in the expanding universe of nicotine consumption alternatives. Known for its unusually high nicotine content, it is both tobacco-free and smoke-free, designed as a “snus”, a Swedish term for a type of oral pouch that delivers nicotine when placed under the upper lip.
Pablo snus differentiates itself from traditional snus with its tobacco-free formulation, often referred to as ‘white snus’ or ‘nicotine pouches’. The product uses synthetic nicotine, flavorings, and other ingredients to deliver a potent dose of nicotine, making it a popular choice for individuals looking for an intense nicotine experience without the use of tobacco.
In addition to its high nicotine content, Pablo snus is also available in various flavors, appealing to a broad range of consumers. Users can select from an assortment of tastes, ranging from the refreshing sensation of mint to the exotic zest of tropical fruits.
However, the popularity of Pablo snus has sparked debates and generated concerns among health experts and regulators. Its high nicotine strength and the potential for dependency and health issues that come with it have been a significant cause for concern. There have also been questions raised about its marketing and distribution strategies, which some critics argue are targeting young adults, potentially enticing a new generation to nicotine addiction.
Using Pablo snus responsibly is paramount due to its potent nicotine content. Users need to be informed about the potential risks associated with its use, primarily the risk of developing a nicotine addiction. It’s also crucial that potential users, especially those who are nicotine-naive, understand these risks before deciding to use the product.
To sum up, Pablo snus is a distinctive product within the nicotine pouch market, appreciated for its high nicotine content and variety of flavors. While it offers a tobacco-free alternative for nicotine consumption, its potent formula requires careful and responsible use. As with all nicotine products, understanding the associated risks and potential health implications is crucial.
Kai says:
Disposable vapes are a fast-growing segment of the vaping market, offering users a convenient, user-friendly way to consume nicotine. They are small, lightweight devices designed for single use; when the battery or e-liquid runs out, you simply dispose of the entire unit and pick up a new one.
Unlike traditional vaping devices, disposable vapes require no maintenance or refill. They come pre-charged and pre-filled with e-liquid, so there’s no need to worry about charging batteries or refilling tanks. This simplicity and ease-of-use make them a popular choice among new vapers and those seeking a fuss-free alternative to cigarettes.
One of the key features of disposable vapes is the wide variety of flavors they offer. From refreshing fruit flavors to classic tobacco tastes, users can enjoy a diverse range of experiences. However, it’s worth noting that the availability of flavors varies by country due to regulatory differences.
Despite their popularity, disposable vapes have not been without controversy. Their disposable nature raises environmental concerns, as the devices contribute to electronic waste. Furthermore, health concerns related to vaping, such as lung injury and nicotine addiction, are also associated with disposable vapes. Critics also express worries about their appeal to young people, largely due to their flavorful options and sleek design.
Regulations around disposable vapes have been tightening in several jurisdictions, with policies aiming to restrict their appeal to underage users and to address health and environmental issues. Measures include banning certain flavors, enforcing stricter age verification processes, and implementing regulations around device disposal.
In conclusion, disposable vape (https://killapods.eu/product-category/disposable-vapes/) vapes offer a convenient and flavorful alternative to traditional smoking and vaping methods. While they continue to gain popularity due to their user-friendly design and variety of flavors, it’s essential to consider the health, environmental, and societal impacts associated with their use. With the evolving regulatory landscape, the future of disposable vapes may see further changes in design, marketing, and availability.
đặc sản bảo lộc says:
Its not my first time to pay a quick visit this website, i am visiting this site dailly and get pleasant information from here all
the time.
meclizine 25mg cost says:
antivert 25mg pills https://meclizine.top/
как найти сайт кракен says:
Hello there! Do you know if they make any plugins to safeguard against hackers?
I’m kinda paranoid about losing everything I’ve worked hard on. Any recommendations?
xxxsuperporn.com says:
Hey great website! Does running a blog like this require a
massive amount work? I’ve absolutely no knowledge of programming
however I had been hoping to start my own blog in the
near future. Anyways, if you have any recommendations
or techniques for new blog owners please share.
I understand this is off subject but I simply had
to ask. Thanks a lot!
Click here says:
Sweet blog! I found it while browsing on Yahoo News.
Do you have any tips on how to get listed in Yahoo News?
I’ve been trying for a while but I never seem to get there!
Cheers
Donald says:
Проще договориться с Бобиком, чтобы тот потерпел ещё месяц без прогулок, чем найти общий язык с женой и тёщей! Python – высокоуровневый язык программирования общего назначения: структуры данных, синтаксис и семантика. Во-вторых, на основе полученных рыночных данных, необходимо разработать финансовую модель, которая будет учитывать возможные риски и последствия от отклонений и изменений запланированного курса: прибыль и убытки, денежные потоки, продажи, производство. А также, производство продукции медицинского назначения. А это может отнять много времени и зачастую, требует больше 2-х недель. Традиционно, бизнес-план состоит из 2-х частей: 1) описательная и 2) расчеты в виде финансово-экономической модели. Финансово-экономические расчеты ведения деятельности. Но не стоит забывать о том, что сделать бизнес план с нуля – это немного дороже, чем основываться на уже готовых разработках. Но только не у нас. Но в отличии от биржи тут нет возможности выбора конкретного автора, так как в компании работают исключительно грамотные и квалифицированные исполнители, каждый из которых может выполнить ваш заказ на отлично. Но и специалист-инвестиционник – это вам тоже не хухры-мухры, специальность редкая, специфическая, требующая многолетнего опыта и специальных знаний. Если вы уже сотрудничали с нами, услуги по написанию бизнес-плана обойдутся вам дешевле. Для инвесторов. Цель такого бизнес-плана – привлечь внешнее финансирование в помощь по реализации проекта.
В этой статье рассказываем об инструменте, который помогает предпринимателям привлечь финансирование в проект, держать бизнес-процессы под контролем, не распыляться на ненужные дела и минимизировать лишние расходы. Концепция сложилась под влиянием короткометражного фильма французского режиссёра Альбера Ламориса «Красный шар», удостоенного в 1956 году Гран-при Каннского кинофестиваля и Оскара. Да и я вам постоянно твержу, что этот документ составляется индивидуально под каждую отдельно взятую бизнес-идею. Задача разработчика – обосновать каждую цифру в бизнес-плане и убедить в успешности проекта. Любая цифра в бизнес-плане может быть подвергнута сомнениям со стороны инвестора. Справиться с данной работой поможет специалист по бизнес планированию. Часто, в таких ситуациях люди с помощью знакомых ищут специалистов, которые могли бы их выручить в данной ситуации. Примеры таких расходов: затраты на ремонт офиса или покупка оборудования. Технологические сложности. Например, клиент желает открыть бизнес по продаже офисной мебели. Вот только пока вы пару месяцев изучаете все доступные материалы, смотрите мастер-классы в ютубе и пробуете привнести что-то новое, ваш бизнес терпит убытки. Безусловно – это полезные материалы, которые могут дать пищу для размышлений.
От адресата бизнеса-плана зависит его структура и содержание. В зависимости от ситуации, требования к документу: содержание и структура бизнес-плана, могут отличаться. Объём анализируемой информации. Чем больше данных требуется проработать, тем больше времени будет затрачено на составление бизнес-плана, и тем большего объёма он получится на выходе. Крайне важно для любого предпринимателя понять, насколько он готов к реализации своей задумки. Не затягивайте вступление – иначе интерес у читателя пропадет, и он может не дойти до главного. Бизнес-планы составляют для разных целей – от поддержки внутреннего развития до привлечения внешнего инвестирования. Бизнес-план на заказ понадобится самым разным людям. Большинство студентов заказывают сочинение или выбирают эссе на заказ на сайте компании. Прежде всего необходимо уяснить, что для того, чтобы научиться писать эссе по обществознанию, необходимо довольно продолжительное время. Чтобы купить качественный бизнес-план, придется потратить время на поиск подходящего поставщика услуги. Чтобы выявить доходы, потребуется просчитать все возможные расходы, как на базовые статьи, так и ежемесячные траты. Чтобы доказать такому инвестору целесообразность проекта, показать выгоду и убедить вложить средства – необходимо разработать и предоставить соответствующий план. При реализации проекта, бизнес-план является отличной возможностью держать руку на пульсе и вовремя принимать меры, если дела пойдут не по плану.
При ознакомлении с бизнес-планом потенциальный инвестор сможет решить, стоит ли ему вкладываться в проект. Обучающимся предлагается разработать проект своего бизнеса и представить решение задачи в виде расчетов. Наши специалисты учитывают все особенности и пожелания клиента, позволяющие выполнить проект именно так, как того требуют правила и установленные нормы, и приемная комиссия. Наши специалисты начнут выполнение задания, как только вы внесёте предоплату. Наши специалисты проводят консультации по разработке бизнес-планов. Наша компания предлагает изготовление бизнес-планов с высоким качеством и со сбалансированным соотношением цена-сроки. С 2011 года нами написано несколько сотен бизнес-планов. 0,8 года реферат на тему организация территории жилого района. В-третьих, необходимо свести рыночную, финансовую и производственную информацию в единый документ и получить завершенную картину по планируемому развитию бизнеса. То есть, чем больше информации предоставит заказчик, тем быстрее ему сделают документ. Стоимость продажи бизнес-плана не покажется слишком высокой, цена зависит от сложности и времени на выполнение. Если вы решили заказать разработку профессионального бизнес-плана у нас, то сделать это можно очень просто. Если банк отказал в кредите вашему бизнесу – не беда.
My web site; http://profsutd.ru
зажим натяжной says:
При выборе данной детали для СИП необходимо
помнить все эти нехитрые правила.
xxxpornvideo.vip says:
Hello, after reading this remarkable article i am also happy to
share my know-how here with friends.
canadian pharcharmy says:
Thanks for sharing such a good thinking, post is nice, thats why i have read it entirely
car detailing says:
Wow, this piece of writing is fastidious, my sister is analyzing such things, therefore I am
going to let know her.
займ малоизвестные мфо says:
It is in reality a nice and helpful piece of information. I’m satisfied that you just shared this useful info with us.
Please stay us informed like this. Thank you for sharing.
My site – займ малоизвестные мфо
xxxpornvideo.vip says:
Hi it’s me, I am also visiting this website on a regular basis, this
website is genuinely pleasant and the visitors are really sharing nice thoughts.
출장홈타이 says:
Hmm it appears like your blog ate my first comment (it was extremely long) so I guess I’ll just sum it up what I wrote and say, I’m thoroughly enjoying your blog.
I as well am an aspiring blog blogger but I’m still new to the whole thing.
Do you have any suggestions for newbie blog writers?
I’d really appreciate it.
Douglas says:
Магистратура – это уровень высшего образования, следующий за бакалавриатом, который предоставляет более глубокие знания и специализацию в определенной области знаний. Программы магистратуры обычно ориентированы на более продвинутое изучение предмета и могут включать в себя как теоретические, так и практические аспекты.
Важные характеристики магистратуры включают:
Специализация: Программы магистратуры позволяют студентам углубить свои знания в определенной области, часто выбирая конкретную специализацию или направление изучения.
Углубленное изучение: Магистратура обычно предполагает более глубокое исследование темы, а также проведение научных исследований, проектов или практических занятий.
Длительность: Продолжительность программ магистратуры может варьироваться в зависимости от страны и университета. Она обычно составляет от одного до двух лет.
Требования к поступлению: Для поступления в программу магистратуры обычно требуется наличие бакалаврской степени или эквивалентного уровня образования. Также может потребоваться предоставление рекомендательных писем и результатов тестов, в зависимости от университета.
Магистерская диссертация: Во многих магистерских программах студенты должны выполнить магистерскую диссертацию или проект, который представляет собой независимое исследование или творческий проект в рамках выбранной области.
Подготовка к карьере: Программы магистратуры часто ориентированы на подготовку студентов к конкретной карьере, научной деятельности или продолжению образования на уровне докторантуры.
Академическая или профессиональная магистратура: В некоторых случаях магистратуры могут быть ориентированы на академические исследования, а в других – на практическое применение знаний в профессиональной сфере.
Магистратура предоставляет студентам возможность глубже погрузиться в избранную область и получить дополнительную квалификацию, что может сделать их более конкурентоспособными на рынке труда и расширить круг карьерных возможностей.
Also visit my site – https://gcsms.com.ua/img/pages/?kupit_diplom_kolledzgha_6.html
montrose co to telluride co says:
Hello, Neat post. There is an issue along with your site in web explorer, might
check this? IE nonetheless is the marketplace chief and a huge component to other people will omit your magnificent writing due to
this problem.
Visit my web site :: montrose co to telluride co
каршеринг белка кар казань says:
This information is invaluable. When can I find out more?
kraken onion зеркала says:
You can certainly see your skills in the work you write.
The world hopes for even more passionate writers like you who are not afraid to
say how they believe. All the time go after your heart.
yyy-casinos.net says:
It’s actually very difficult in this busy life to listen news on TV, so I simply use
web for that purpose, and obtain the newest information.
через че зайти на гидру says:
This paragraph is really a pleasant one it assists new
the web visitors, who are wishing for blogging.
출장안마 says:
Thanks for one’s marvelous posting! I certainly enjoyed reading it,
you might be a great author.I will be sure to bookmark your
blog and will come back at some point. I want to encourage you to definitely continue your
great writing, have a nice holiday weekend!
abstract lapel pins says:
Hi, I do believe your site could possibly be having internet browser compatibility problems.
Whenever I look at your website in Safari, it
looks fine however, if opening in Internet Explorer, it has some overlapping issues.
I simply wanted to give you a quick heads up! Aside from that, great website!
kitchen clock says:
If you wish for to grow your experience only keep visiting this web page and be updated with
the most up-to-date news update posted here.
Top sex sites for perfect jizz says:
These are truly impressive ideas in on the topic of blogging.
You have touched some fastidious factors here.
Any way keep up wrinting.
pokemon go crack says:
Get moving! The writing in this piece is superb.
Whenever I read this post, I think of my roommate. He never shut up about it.
That’s why I’m sending you this article.
It’s safe to say that you’ll enjoy reading it. Please keep us updated.
driver genius pro crack says:
Your blog’s format and writing skills are both superb. This must be a premium theme or you’ve modified it yourself. Whatever the situation may be, keep up with top-notch lyrics, and that’s about all I have to say about that.
mediahuman youtube downloader crack says:
Your blog’s organization and writing style are both quite impressive to me. Is this something you purchased, or did you modify it yourself?
Keep up-to-date with the best lyrics there are; it’s rare to come across a blog of such beauty in this day and age.
gravity designer crack says:
The present moment is ideal for dreaming about a brighter tomorrow and celebrating success.
As I read this post, I thought there could be a few items of interest or tips I might share.
There could be more articles you can write that tie into this one.
I’m curious to learn more about this!
windows 10 home crack says:
This is quite attractive and practical data. I appreciate you taking the time to give us this insightful data.
Keep us updated in the same fashion. Please keep me updated.
groovy clock says:
Excellent, what a web site it is! This weblog presents valuable information to us,
keep it up.
Epifania says:
Cheers! Plenty of data!
Here is my blog – https://owlpedia.org/index.php/User:DelphiaTjalkabot
출장마사지 says:
It’s impressive that you are getting thoughts from this
article as well as from our dialogue made here.
ads508 says:
It’s very simple to find out any topic on net as compared to books, as I found this paragraph at this web site.
groovy clock says:
Really no matter if someone doesn’t be aware of after that its up to other
visitors that they will assist, so here it occurs.
pharmadoctor.com says:
Appreciating the time and effort you put into your site and detailed information you provide.
It’s awesome to come across a blog every once in a while that
isn’t the same unwanted rehashed information. Wonderful read!
I’ve saved your site and I’m including your RSS feeds to my Google account.
как пополнить баланс на кракене says:
Thank you for some other informative web site. The place else could I get that kind of info written in such an ideal
way? I have a challenge that I’m simply now working on, and I
have been at the look out for such information.
how to write an overview of a paper says:
Hi there, I enjoy reading through your article. I like to write a little comment to
support you.
XXX Pussy Sex Pro says:
Hello everyone, it’s my first pay a visit at this website, and post is truly fruitful in support of me, keep
up posting these types of articles.
genpornopics.com says:
Good day! I simply would like to give you a big thumbs
up for the excellent information you’ve got right here on this post.
I will be returning to your website for more soon.
Isabelle says:
Excellent information Regards.
Feel free to surf to my website https://nebenwelten.net/index.php?title=Paras_Nikotiinipussi_%E2%80%93_Nyt_On_Aika_Kokeilla_Suosikkiasi
Mevastatin says:
Whats up very nice web site!! Man .. Beautiful ..
Superb .. I’ll bookmark your website and take the
feeds also? I’m happy to search out numerous helpful info
here in the publish, we need work out extra techniques in this regard, thank you for sharing.
. . . . .
groovy clock says:
This is a topic that’s close to my heart… Take care!
Exactly where are your contact details though?
challenge coin custom says:
This website truly has all of the information I needed concerning this subject and didn’t know
who to ask.
Renaldo says:
You have made your point.
my blog post: http://www.dh-sul.com/bbs/board.php?bo_table=free&wr_id=314144
pornailist.com says:
Pretty! This has been a really wonderful article. Thanks for supplying
this info.
ai-porn-art.com says:
I am really loving the theme/design of your website.
Do you ever run into any internet browser compatibility problems?
A handful of my blog readers have complained about
my website not operating correctly in Explorer but looks great in Chrome.
Do you have any advice to help fix this issue?
quick fix 6 says:
Drug testing is not typically a requirement when buying a home, as it does not directly affect the purchasing process or mortgage approval. However, some landlords may conduct drug tests when renting a property as part of their application process.
madepics.org says:
I always used to study post in news papers but now as I am a user of net thus from now I am using net for articles,
thanks to web.
car rental DXB says:
Wow that was odd. I just wrote an incredibly long comment but
after I clicked submit my comment didn’t show up. Grrrr…
well I’m not writing all that over again.
Anyways, just wanted to say wonderful blog!
How to Go Live on TikTok says:
You’re so interesting! I do not suppose I’ve read through anything like this before.
So nice to find someone with original thoughts on this subject
matter. Really.. thanks for starting this up.
This site is something that is needed on the internet, someone with a little originality!
madepics.net says:
Heya i am for the primary time here. I came across this board and I find It really
useful & it helped me out a lot. I am hoping to provide one thing again and aid others like you aided me.
madepics.net says:
Great post. I was checking continuously this blog and I’m impressed!
Extremely useful information specially the last part 🙂 I care for such
information much. I was seeking this particular info for a long time.
Thank you and best of luck.
can i rent car in dubai says:
Hi there, I log on to your new stuff like every week.
Your writing style is witty, keep up the good work!
pornmidjourney.com says:
Hello, i read your blog from time to time and i own a similar one and i was just wondering if you get
a lot of spam comments? If so how do you protect against it, any plugin or anything you can suggest?
I get so much lately it’s driving me insane so any assistance is
very much appreciated.
midporney.com says:
What’s up friends, its great post regarding cultureand fully explained,
keep it up all the time.
Marie says:
Смотрите Русские Сериалы Онлайн на Ruseriya.ru!
Как часто вы ищете платформу, чтобы погрузиться в мир русских сериалов? Порой сложно найти сайт, где можно было бы с комфортом и без оплаты наслаждаться качественным контентом. Встречайте – Ruseriya.ru!
Почему выбирают нас?
Бесплатно и без регистрации: Наслаждайтесь вашими любимыми сериалами без лишних хлопот и скрытых платежей.
Широкий выбор: Неважно, предпочитаете ли вы драму, комедию или криминал – наша библиотека постоянно обновляется, чтобы удовлетворить любой вкус.
HD-качество: Благодаря высокому разрешению, вы сможете погрузиться в мир сериалов еще глубже.
Удобство использования: Интуитивно понятный интерфейс сайта позволяет быстро находить интересующие вас сериалы и серии.
Без рекламы: Забудьте о раздражающих рекламных роликах! На Ruseriya.ru вы сможете наслаждаться просмотром без перерывов.
Доступность: Смотрите ваши любимые сериалы где угодно и когда угодно – на компьютере, планшете или смартфоне.
Присоединяйтесь к многотысячной аудитории Ruseriya.ru
С каждым днем число наших пользователей растет, и в этом нет ничего удивительного! Ведь мы предоставляем доступ к лучшим русским сериалам, созданным как отечественными, так и зарубежными производителями.
Заключение
Ruseriya.ru – это ваш надежный проводник в мир русских сериалов. С нами вы всегда в курсе последних новинок и сможете вернуться к проверенным временем классикам. Не упустите шанс стать частью нашего сообщества и откройте для себя мир зрелищных историй!
Присоединяйтесь и наслаждайтесь просмотром на Ruseriya.ru!
Feel free to visit my webpage; https://pattern-wiki.win/wiki/Ruseriya.ru_2
ai-porn-maker.com says:
My developer is trying to persuade me to move to .net from
PHP. I have always disliked the idea because of the expenses.
But he’s tryiong none the less. I’ve been using WordPress on several websites for
about a year and am worried about switching to another platform.
I have heard excellent things about blogengine.net.
Is there a way I can transfer all my wordpress posts into
it? Any help would be really appreciated!
PornAIPen.com says:
That is really fascinating, You’re a very skilled blogger.
I have joined your rss feed and stay up for in search of more
of your wonderful post. Also, I’ve shared your site in my social networks
aipornlist.com says:
It’s enormous that you are getting thoughts from this
post as well as from our argument made here.
Short shorts AI Porn Pics says:
Good day! I could have sworn I’ve been to this web site before
but after browsing through many of the posts I realized
it’s new to me. Anyways, I’m certainly delighted I came across it and I’ll be book-marking it and checking back frequently!
รับฟรี เดิมพัน w88 รหัสโบนัส says:
I have been browsing on-line greater than 3 hours as of late, yet I
by no means discovered any fascinating article like yours.
It’s pretty value sufficient for me. In my view, if all website owners and bloggers made good content as you
probably did, the web might be much more useful than ever
before.
pestana casino park says:
Hello there, I think your site might be having internet browser compatibility problems.
Whenever I take a look at your site in Safari, it looks fine however, when opening in Internet
Explorer, it’s got some overlapping issues.
I merely wanted to provide you with a quick heads up!
Other than that, fantastic site!
ai-porn-generator.xyz says:
Wonderful blog! I found it while browsing on Yahoo News.
Do you have any tips on how to get listed in Yahoo News?
I’ve been trying for a while but I never seem
to get there! Many thanks
porn tubes says:
I was suggested this blog by my cousin. I am not sure whether or
not this submit is written by means of him as nobody else know such
distinctive about my problem. You’re incredible!
Thank you!
خرید فالوور اینستاگرام says:
you’re actually a excellent webmaster. The site loading speed is amazing.
It kind of feels that you are doing any distinctive trick.
In addition, The contents are masterwork. you have performed a magnificent task on this matter!
короткие грифы для штанги says:
Great site you have here but I was wanting to know if you knew of any forums that cover the same topics discussed here?
I’d really like to be a part of group where I can get feed-back from other knowledgeable people
that share the same interest. If you have any recommendations, please let me know.
Thanks a lot!
Howard says:
Coffee syrups are actually an exciting method to improve your coffee knowledge by including a ruptured of taste and sweetness. Whether you favor traditional tastes like vanilla and caramel or even desire to look into even more unique possibilities, choosing the best coffee syrups may make all the variation, https://usedautomoto.com/user/profile/2082774.
casumo casino says:
Howdy! I could have sworn I’ve been to this website before but after
browsing through some of the post I realized it’s new to me.
Nonetheless, I’m definitely happy I found it and I’ll be book-marking and checking back frequently!
indexx.top says:
I was wondering if you ever considered changing
the page layout of your blog? Its very well written; I love what youve got to say.
But maybe you could a little more in the way of content so people could connect with it better.
Youve got an awful lot of text for only having 1 or 2 pictures.
Maybe you could space it out better?
indexxx.top says:
Greetings from Carolina! I’m bored to death at work so I
decided to check out your blog on my iphone during lunch
break. I enjoy the information you provide here and can’t wait to take a
look when I get home. I’m shocked at how quick your
blog loaded on my cell phone .. I’m not even using WIFI, just 3G ..
Anyways, good blog!
indexxx.top says:
Keep on writing, great job!
indexxx.top says:
Truly when someone doesn’t understand afterward its up to other viewers that
they will help, so here it occurs.
모텔출장마사지 says:
Quality posts is the secret to attract the users to visit the website, that’s what this site is providing.
nude says:
I am really enjoying the theme/design of your site. Do you ever run into any web browser compatibility problems?
A small number of my blog audience have complained about
my site not operating correctly in Explorer but looks great in Safari.
Do you have any recommendations to help fix this problem?
ana de armas nude says:
I have been exploring for a bit for any high quality articles or weblog posts in this
sort of space . Exploring in Yahoo I at last stumbled
upon this web site. Reading this information So i’m happy to express that I have a very good uncanny feeling
I came upon exactly what I needed. I so much certainly will make sure to don?t put
out of your mind this web site and provides it a look on a
constant basis.
dreamingporn.com says:
Thank you for any other informative website. The place else may just I am getting that type
of info written in such an ideal approach? I’ve a
undertaking that I’m simply now operating on, and I’ve been on the glance
out for such information.
Tent AI Porn Generated says:
Hmm it looks like your blog ate my first comment (it was super long) so I guess I’ll just sum it
up what I submitted and say, I’m thoroughly enjoying your blog.
I too am an aspiring blog writer but I’m still new to the whole thing.
Do you have any suggestions for newbie blog writers?
I’d really appreciate it.
my site says:
Great post.
voyeuraiporn.com says:
Hi there, I check your blog on a regular basis.
Your story-telling style is awesome, keep
it up!
mary burke nude naked says:
I seriously love your site.. Great colors & theme. Did you build this site yourself?
Please reply back as I’m planning to create my own personal site
and would love to learn where you got this from or just what the theme is named.
Cheers!
hot mature porn says:
Hurrah! After all I got a web site from where I be able to genuinely get helpful data concerning my study and knowledge.
지역별 마사지 says:
Your means of explaining the whole thing in this post is actually nice, all can without difficulty know it, Thanks a lot.
모텔출장마사지 says:
Helpful info. Lucky me I found your web site by
chance, and I am shocked why this accident didn’t happened earlier!
I bookmarked it.
커플마사지 says:
Genuinely when someone doesn’t know after that its up to other visitors that they will assist,
so here it occurs.
Andrew says:
Condos provide a desirable substitute to single-family homes for possible home customers. While they are an excellent option for several, it is very important to be familiar with some prospective threats when buying a residence, https://grindanddesign.com/members/weightsteven91/activity/1980070/.
porn says:
This article is genuinely a nice one it assists new
net people, who are wishing for blogging.
porn says:
I know this website offers quality dependent posts and extra stuff, is there any other site which provides these
things in quality?
Melinda says:
A safari is actually an extraordinary adventure that can be the travel of a lifetime. From ticking off the Large Five in Tanzania to identifying mountain range gorillas in Rwanda and Uganda, safari locations use extraordinary take ins, http://qooh.me/emersonasfoster.
porn says:
It’s a shame you don’t have a donate button! I’d
without a doubt donate to this excellent blog!
I suppose for now i’ll settle for book-marking and adding your RSS feed to my
Google account. I look forward to fresh updates and will share this
blog with my Facebook group. Chat soon!
Rocco says:
Perfectly expressed without a doubt! .
my page – http://www.drsbook.co.kr/board/9293337
Anne says:
Reliable advice Appreciate it.
Look into my page; https://www.teacircle.co.in/eng-films-site-2/
AIporn.men says:
Thank you for sharing your info. I really appreciate your efforts
and I am waiting for your further write ups thank you once again.
porn says:
Hi there, You’ve done an excellent job. I will definitely digg it and personally recommend to my friends.
I’m confident they will be benefited from this web site.
wondershare pdfelement pro crack says:
Finally, I’d like to express my gratitude for everyone’s insightful comments and advice.
This post helped me to gain a deeper understanding of the subject at hand and to pick up some practical pointers that I may put to use in the future.
This piece is unusual in that it is both insightful and practical.
winzip registry optimizer crack says:
I’d want to send the author my most heartfelt thanks for creating such a wonderful piece of literature.
It’s obvious that you worked hard on this piece because you want to help people, and for that I thank you.
Keep up the fantastic effort, and I look forward to reading more of your fantastic articles in the future!
windows 11 crack says:
“Wow! The quality of this content has really blown me away.
This artistic endeavour was obviously dear to the author’s heart.
From the intriguing introduction to the insightful analysis and compelling conclusion, this article excels in every way.
microsoft visio 2013 crack says:
This kind of thoroughness and expertise in the subject topic is inspiring.
The author has conducted substantial study to provide credible evidence for their arguments.
A breath of fresh air is content that is both engaging and substantive.
apowersoft apowermanager crack says:
It’s also significant that there are pictures included in this piece.
Careful consideration was given to the selection of images, infographics, and charts, all of which contributed significantly to the quality of presentation and readability of the content.
A lot of work was put into making this a visually and intellectually pleasing read.
porn says:
This piece of writing will assist the internet users for creating new blog or even a blog from start to end.
The Mirror News Today says:
Link exchange is nothing else however it is just placing the other person’s blog link on your page at appropriate
place and other person will also do similar in favor of you.
전국 후불 출장마사지 says:
hello there and thank you for your info – I’ve definitely picked up something new from right here.
I did however expertise several technical issues using this web site,
as I experienced to reload the site many
times previous to I could get it to load correctly. I had been wondering if your hosting is OK?
Not that I am complaining, but sluggish loading instances times will very frequently affect your placement
in google and can damage your quality score if ads and marketing with Adwords.
Anyway I’m adding this RSS to my email and could look out for much more of your
respective interesting content. Make sure you update this again soon.
먹튀폴리스 says:
You’re so cool! I don’t suppose I’ve truly read through something like that before.
So wonderful to find somebody with unique thoughts on this
issue. Seriously.. thank you for starting this up. This site is something that is required on the internet, someone with a little originality!
aiporncumshot.com says:
Wow, that’s what I was looking for, what a data!
existing here at this website, thanks admin of this website.
vintageaiporn.com says:
Fantastic site you have here but I was curious if you knew of any community forums that cover the
same topics talked about in this article?
I’d really like to be a part of community where I can get opinions from other knowledgeable people that share the same interest.
If you have any suggestions, please let me know. Cheers!
Gray AI Porn Pics says:
Hi there! I know this is kind of off topic but I
was wondering which blog platform are you using for this site?
I’m getting fed up of WordPress because I’ve had
issues with hackers and I’m looking at options for another platform.
I would be fantastic if you could point me in the direction of a good platform.
Norway News Today says:
Pretty component to content. I simply stumbled upon your website and in accession capital to
say that I get in fact enjoyed account your blog posts.
Any way I’ll be subscribing to your feeds and even I success you get admission to persistently
fast.
경기친구랑마사지 says:
I visited multiple web sites but the audio feature for audio
songs current at this site is in fact wonderful.
AIPornGeneration says:
Hello! I’ve been reading your web site for a while now and finally got the bravery to go ahead and give you a shout out from Dallas Tx!
Just wanted to mention keep up the good job!
Free Porn AI Pics says:
Hello, this weekend is good in support of me, since this moment i am reading this wonderful educational article here
at my home.
동작1인샵 says:
These are genuinely wonderful ideas in regarding blogging.
You have touched some pleasant things here. Any way keep up wrinting.
Pokies Net says:
bookmarked!!, I really like your blog!
аккаунты фейсбук says:
What’s up, always i used to check weblog posts here in the early hours
in the daylight, for the reason that i like to
gain knowledge of more and more.
ads508 says:
of course like your web site but you have to take a look at
the spelling on quite a few of your posts. Many of them
are rife with spelling issues and I to find it very bothersome to inform the truth then again I’ll surely come back again.
baccarat blog says:
Hello! Do you know if they make any plugins to protect against hackers?
I’m kinda paranoid about losing everything I’ve worked hard on. Any tips?
Mellissa says:
Unlike conventional financial, where every purchase passes through a centralized system, cryptocurrency operates individually of banking companies, federal governments, and banks. Purchases are taped on a social journal, got in touch with the blockchain, which tracks all the deals made on the network. All attendees in the network have access to the ledger, which makes certain clarity, and the dispersed nature of the ledger makes it tough to accomplish fraudulent tasks, ensuring security, https://www.cheaperseeker.com/u/guitardog9.
Jackpot Bet Online says:
Thanks for your personal marvelous posting! I genuinely enjoyed reading it, you are a great author.
I will make certain to bookmark your blog and will often come back sometime soon. I want to encourage yourself to continue your great
writing, have a nice evening!
AI Porn Generators says:
Very energetic post, I liked that bit. Will there be a part 2?
ขอเชิญชวน says:
tgaslot มิติใหม่ของการหาเงินแบบง่ายๆ คุณพร้อมแล้วหรือยัง ที่จะเข้ามาสัมผัสกับ pg slot มิติใหม่ที่โลกของออนไลน์ แล้วก็เกมออนไลน์ ถ้าหากคุณพร้อมแล้วพวกเราขอเชิญชวน
หมุนวงล้อสล็อต says:
เกมสล็อต M98ซึ่งเกมสล็อตออนไลน์นั้น จะเป็นเกมพนันหมุนวงล้อสล็อต ที่ข้างในแต่ละเกมจะประกอบไปด้วยสัญลักษณ์สล็อตต่างๆหลายตัว PG SLOT โดยมีกฎกติกาในการเล่นรากฐาน
ทั่วทั้งโลก says:
สล็อต ฟรี สล็อตเว็บไซต์ตรง ให้บริการเกมพนัน สล็อตออนไลน์ ได้เงินจริง หนึ่งในเกมพนันออนไลน์ เล่นง่าย ยอดนิยมมากมายๆจากนักการพนันทั่วทั้งโลก pg slot สล็อตแตกง่ายแตกหนักสล็อต
남동구출장마사지 says:
This design is steller! You obviously know how to keep a reader amused.
Between your wit and your videos, I was almost moved to start my own blog (well, almost…HaHa!) Fantastic job.
I really enjoyed what you had to say, and more than that,
how you presented it. Too cool!
The Daily Mail News Today says:
I enjoy, cause I discovered exactly what I was taking a look for.
You have ended my 4 day long hunt! God Bless you man. Have a
nice day. Bye
The Daily Telegraph News Today says:
That is a great tip particularly to those fresh to the blogosphere.
Simple but very accurate info… Appreciate your sharing this one.
A must read post!
figrcollage pro crack says:
Wow! Absolutely outstanding work here.
I must give the author credit for creating such a well-written post.
It kept my attention throughout, and I believe its concepts will be helpful to its readers.
xmanager power suite crack says:
The article’s structure is something I particularly appreciate.
An intriguing prologue set the stage for the rest of the story.
The major body of the text offered a wealth of information, with supporting research and several examples that simplified complex topics.
After reading the conclusion, which effectively summed up the entire paper, I felt satisfied and motivated to study more.
check my reference says:
Very nice article, just what I needed.
duplicate photos fixer pro crack says:
The writing was also of exceptionally high quality.
The author has remarkable command of the English language, wit, and the ability to communicate intricate ideas.
The most intricate details were explained in a way that even a layperson could understand.
Each sentence has been meticulously crafted to keep the reader interested and informed.
sardock fences 3 crack says:
In addition, the author’s knowledge is impressive in both its range and depth.
I appreciate that the author has used credible sources and references to back up any claims they have made in the work.
You can tell right away that the author is passionate about the topic and has done extensive research.
voicemod pro crack says:
Finally, I’d like to express my gratitude for everyone’s insightful comments and advice.
This post helped me to gain a deeper understanding of the subject at hand and to pick up some practical pointers that I may put to use in the future.
This piece is unusual in that it is both insightful and practical.
Office Timeline Plus/Pro Edition says:
I’d want to send the author my most heartfelt thanks for creating such a wonderful piece of literature.
It’s obvious that you worked hard on this piece because you want to help people, and for that I thank you.
Keep up the fantastic effort, and I look forward to reading more of your fantastic articles in the future!
https://msglomi.com says:
Nice replies in return of this matter with genuine arguments and telling all
regarding that.
pornpen says:
Thank you a lot for sharing this with all of us you really
recognize what you are speaking about! Bookmarked. Please also discuss with my site =).
We can have a hyperlink exchange agreement among us
Top list of the best ai porn generators says:
If you wish for to obtain a great deal from this piece of writing then you have to apply these methods
to your won webpage.
alternatif Biru69 says:
Hello to every body, it’s my first visit of this weblog; this weblog includes amazing and truly excellent data in favor of visitors.
Look into my web-site – alternatif Biru69
Porn Generators List says:
wonderful publish, very informative. I’m wondering why the other experts of this sector do
not realize this. You must continue your writing.
I am sure, you’ve a great readers’ base already!
김포모텔출장마사지 says:
I am regular visitor, how are you everybody? This article posted at this web site is in fact pleasant.
website says:
Hmm is anyone else encountering problems with the images
on this blog loading? I’m trying to determine if its a problem on my end or if it’s
the blog. Any suggestions would be greatly
appreciated.
website says:
Nice post. I learn something totally new and challenging on websites I stumbleupon everyday.
It’s always useful to read articles from other writers and use a little something from their sites.
Judson says:
http://acutanisotretinoin.one/
xxxmaturexxx.pro says:
Greate post. Keep posting such kind of info on your page.
Im really impressed by your blog.
Hi there, You have done an incredible job. I will certainly digg
it and in my opinion suggest to my friends. I’m sure they will be benefited from
this site.
aigeno says:
It’s in fact very complicated in this busy life to listen news on Television, thus
I only use web for that purpose, and take the newest news.
Edwina says:
It offered a justification for Imperialism. However, it could also justify some of the more extreme Social Darwinist ideas of racial superiority and it allowed for treating the subject peoples as innately inferior. In summary, Christianity, commerce and civilisation was a neat way to justify the uniqueness of the British Empire and yet give it a justification for continuing it into the future. It could also be deeply patronising and justified cultural imperialism and racial stereotyping and yet there was a surprisingly large dose of truth behind these motivations and strain of British imperialism. Mercantilism and chartered monopoly companies were becoming quite the fashion in the late sixteenth and seventeenth centuries (and would live on to the nineteenth in some cases. It was a cheap and relatively easy way for a feudal monarch to gain an income on the back of his nation’s prestige and maritime exploits. He (or she) could give permission to explorers to claim lands on his (or her) behalf and then authorise certain companies (with the aid of Charters) to exploit the natural resources in that part of the world in return for a fixed income to the monarch. In many ways it was something for nothing for the ruler. He could provide exclusive (monopoly) rights to certain cronies in return for money, political support or promotion at home.
It does not charge any amount, and you can create many mails according to your demands. Every mail you will receive in your inbox, will appear on the homepage of the 10 minute mail. You can open that mail, read it and reply it. It is an impressive choice to prevent an official email address from spams. SpamBog is the best fake email Id generator service for those, who is looking for different domains. It provides you 20 different domains to use. In addition, you get a secure inbox because this fake email service offers you a password to lock your inbox. In other words, you will get a temporary email address that will work as your official email Id for a few minutes. Using SpamBog is quite easy. All you have to do is click the key icon, and the random email Id will be generated. You can select a suitable domain name for your fake email ID, or you can avoid using the list of different domains.
Make a list of your sending domains: It is important to create SPF records for all the domains you control, even the ones you’re not mailing from. Create your SPF record: Here is how to create your SPF with ease. Publish your SPF to DNS: Work with your DNS server administrator to publish your SPF record to DNS, so mailbox providers can reference it. Test: Test your SPF record with a SPF check tool. If you are sending a spam-free email, we highly recommend that you verify that the emails being sent through Gmail, Salesforce, Mailchimp, etc. are being linked to your domain. This proves to ISP’s that you are a trustworthy sender, and they will avoid placing your email in a spam folder. Without verifying that your email is linked to your domain, your email will get lost in a sea of spam emails. Avoid this with one simple step and you could get caught in the spam box! When you are building a relationship with your customers, and with a new email contact, you should instantly ask them to add your email address to their address book.
Why Didn’t He Just Blow Himself Up In The Toilet? A reader asks a very interesting question about the undie-bomber – why did he get back into his seat to detonate a bomb that had a ramshackle detonator and where he could be overcome by fellow travelers? I keep hearing this even described as a failed terrorist attack on an airplane. But was it really? I keep hearing about how the system failed, but did it really? Think about it. First, what is the major goal of terrorism? It is not to bring down airplanes. It is not to destroy the West. It is, pure and simple, to create terror in people. Why? Because when people are afraid they overreact. And this includes most of us, yourself included. If the intent of al Qaeda in this latest instance was to bring down an airplane, then it failed. But if its intent was to create fear and overreaction, then it succeeded Personally, I think it was the latter.
That idea is email aliases, where you create different email addresses for services and sites that you sign up to while keeping your “real” email to yourself. But that’s not as easy to manage as the Firefox solution. By simply clicking on a “relay” button next to the email fields, once installed, the add-on will allow an alias to be created on-demand. All emails sent to that new address will automatically be forwarded to your actual address. This user interface is what makes Private Relay so simple, and so powerful: removing the alias means that no further emails will be received, all spam will be terminated from that sender and any others they might have shared your address with. If a service you are using suffers a data breach and logins appear on the dark web, a would-be attacker wouldn’t have your email address for use in executing a credential stuffing attack. So, what’s the catch? Ah, yes, the catch. There’s always a catch. In the case of Mozilla’s Private Relay, it’s merely that it is still in testing mode at the moment, an invite-only alpha testing mode. That will change in due course, and by keeping an eye on the Private Relay pages you will be able to sign up to the waiting list and join in “soon,” according to Mozilla. You might also think for old-timers like me who have had the same very public email address for more than 20 years, then maybe it’s a little late to start using aliases, but think again. It’s never too late to start dealing more effectively with the problem of spam. I’ll be front and center of the queue to test this one when the testing expands.
Also visit my web page: http://myservicepride.com/__media__/js/netsoltrademark.php?d=Camillacastro.us%2Fforums%2Fprofile.php%3Fid%3D1260
canadian healthcare online pharmacy says:
pharcharmy online no script canadian healthcare online pharmacy
trust online pharmacy
https://msglomi.com says:
What i don’t understood is actually how you are no longer
really much more smartly-liked than you might be now.
You are so intelligent. You already know thus significantly on the subject of this matter, produced me personally
imagine it from a lot of varied angles. Its like men and women are not interested until it is something to accomplish with Lady gaga!
Your individual stuffs great. Always take care of it up!
rebeccazelda.org says:
Аккаунты Facebook для рекламы – это
отличный способ продвижения вашего бизнеса в соцсетях в магазине аккаунтов.
Вы можете использовать две варианта: регистрация
собственного аккаунта или приобретение уже готового.
Оба способа имеют свои преимущества.
Если вы хотите полную независимость над аккаунтом и настройками, то регистрация собственного
аккаунта – это идеальный выбор.
Если же вам нужна немедленная аудитория и мгновенное начало, то покупка аккаунта – идеальное решение.
В любом случае, аккаунты Facebook для
рекламы помогут вам достичь новых клиентов и увеличить продажи.
AI-porn.rocks says:
I used to be recommended this web site by means of my cousin. I’m
now not sure whether this submit is written through him as no one else know such precise approximately my difficulty.
You are wonderful! Thank you!
AI Granny says:
Today, I went to the beach front with my kids. I found a sea shell and gave it to my 4
year old daughter and said “You can hear the ocean if you put this to your ear.” She placed the shell to her ear and screamed.
There was a hermit crab inside and it pinched her ear.
She never wants to go back! LoL I know this is entirely off topic but I had to tell someone!
MILF and Granny Porn says:
Hello Dear, are you really visiting this web page daily, if so afterward you will absolutely obtain good know-how.
shemale AI Porn Pics says:
Pretty! This has been an incredibly wonderful article.
Thanks for supplying this info.
ai-porn.icu says:
Hello there! Do you know if they make any plugins to assist
with Search Engine Optimization? I’m trying to get my blog to rank for some targeted keywords but I’m not seeing
very good gains. If you know of any please share.
Thank you!
Republic of China Today says:
There is certainly a great deal to learn about this topic.
I love all of the points you made.
midporny says:
If you would like to improve your experience simply keep visiting this
web site and be updated with the latest news posted here.
авиатор 1 вин says:
Ваша Удача – В Ваших Руках с 1Win! авиатор 1 вин
Казино Гама зеркало says:
Погружение в азарт: Gama Казино открывает ворота к увлекательным приключениям!
Казино Гама зеркало
sga123 says:
great put up, very informative. I’m wondering why the opposite specialists
of this sector do not understand this. You should proceed your writing.
I am sure, you have a great readers’ base already!
계양출장홈타이 says:
Hey I know this is off topic but I was wondering if you knew of any widgets I could add to my blog that automatically tweet
my newest twitter updates. I’ve been looking for
a plug-in like this for quite some time and was hoping maybe you would have some experience with something like this.
Please let me know if you run into anything. I truly enjoy reading your blog and I look
forward to your new updates.
Recommended Reading says:
My brother suggested I might like this website. He was entirely right.
This post truly made my day. You can not imagine simply how much time I had spent for this information!
Thanks!
Dispensary near me says:
Hi there it’s me, I am also visiting this site regularly, this
site is in fact nice and the users are in fact sharing nice thoughts.
Dermal fillers Pensacola says:
Asking questions are truly nice thing if you are not understanding anything entirely, except this post gives pleasant understanding yet.
Celesta says:
Только надежному исполнителю можно доверить сформировать https://digitallworld.ru Работа с удаленными командами требует особого внимания к деталям и понимания того, как эффективно управлять на расстоянии. Вот несколько ключевых шагов, которые можно предпринять при создании удаленного отдела продаж с помощью компаний, как “Немкович Студио”:
Подготовьтесь к удаленной работе: Убедитесь, что у вас есть необходимые технологии и инфраструктура для эффективной удаленной работы, включая средства связи, проектные инструменты и безопасность данных.
Определите задачи и ожидания: Сформулируйте четкие задачи и ожидания для удаленного отдела продаж. Это поможет участникам команды понять свои обязанности и цели.
Выберите правильных сотрудников: Подбирайте профессионалов, способных эффективно работать на удаленке. Обратитесь к “Немкович Студио” или подобным компаниям, чтобы получить помощь в подборе квалифицированных сотрудников.
Обучение и интеграция: Обеспечьте новых членов команды обучением и интеграцией в рабочий процесс. Это поможет им быстрее адаптироваться к удаленной среде.
Установите систему коммуникации: Используйте средства связи, такие как видеоконференции и чаты, для эффективной коммуникации и совместной работы.
Установите метрики и мониторинг: Определите ключевые показатели производительности (KPI) для удаленного отдела продаж и создайте систему мониторинга и отчетности. Это поможет вам отслеживать успехи и корректировать стратегию при необходимости.
Обеспечьте безопасность данных: Позаботьтесь о безопасности информации и данных, особенно если удаленные сотрудники имеют доступ к конфиденциальным данным клиентов.
Уделяйте внимание мотивации и обратной связи: Создайте систему мотивации и обратной связи для удаленных сотрудников. Поддерживайте их мораль и обеспечьте возможность делиться своими мыслями и идеями.
Постоянное совершенствование: Работа с удаленным отделом продаж – это непрерывный процесс. Постоянно анализируйте результаты и ищите способы оптимизации работы удаленных команд.
Сотрудничество с компаниями, как “Немкович Студио”, может помочь вам создать и эффективно управлять удаленным отделом продаж, учитывая все особенности этой формы работы.
b5JjiwV5-3
Nell says:
If your GE ice maker doesn’t work, check the water inlet valve, freezer temperature, ice maker module, switch, thermostat, and even the ice maker itself. If a GE ice maker doesn’t work, check the ice maker. But this is not recommended because of contaminants in the water.However, if the water doesn’t dispense, which is likely what will happen with a GE refrigerator, install the bypass plug. For a machine that works so hard, it isn’t surprising that your clothes washer will occasionally break down, stop draining, quit spinning, or its performance will degrade to the point where the clothes are not getting sufficiently clean. Neither the Board of Realtors nor its representatives are allowed to discuss specific grievances – and, unlike complaints to government agencies, these are not public record. Are you shopping for a new refrigerator and wondering which brand is the most reliable? Refrigerators are the most repaired appliance in the home, but you can limit issues by picking the right brand.
We have affiliate relationships with the providers (Amazon, Clickbank, etc) of the products, goods and services that are linked to on this page and may be compensated when you buy. Sometimes, you may be able to find the individual part without having to buy the entire assembly. If you are tired of having dishpan hands due to a malfunctioning dishwasher. Q. ARE YOU ABLE TO GIVE ME A FULL LIST OF THE BRANDS YOU FIX? Just call here to get the best price repair, service & solution of all brands washing machines in Faridabad. In this guide, I reveal the most reliable refrigerator brands. Ensure you buy the right fit for your refrigerator model. Be sure to buy one using the model number of your GE refrigerator.2. Then, with this knowledge, buy a new water filter. The water line attaches to a solenoid at the back or bottom of the refrigerator and then travels to the ice maker. Take a multimeter and test the solenoid of the inlet valve. On the plus side, if you plan a simple replacement of fixtures, you may not need a building permit and can probably find a competent handyperson to take care of the job.
Also, check the pressure of the water coming to the valve.For the pressure, you may need a certified plumber to do this. However, spending so much time in the sun may leave you feeling dehydrated, which is why you’ll need a highly efficient floating cooler to store your favorite drinks close by and at a cool temperature. You don’t need to book an appointment or have an expensive in-house call.Always unplug the refrigerator before you carry out any repair or diagnostic work on it. Just reach out to us and have a trained and well-equipped freezer technician address any issue in a quick and trusted manner. However, if none of these applies, find a certified technician to use other test points to troubleshoot and fix the problem. However, a purely mechanical issue with a washing machine, even though the washing machine deals with water, may be most appropriate for an appliance repair technician. However, you should change it to a new one at least once every six months. The location of the filter and the process of removing and installing it differ from one model to another.The change filter indicator on the display usually alerts you whenever it is time to replace the filter.
If the filter is older than 6 months, replace it, fitting it properly while doing so. Will a GE Ice Maker Work without Filter? But not until the furniture is moved in will the room be anything less than a pretty picture. Reach in and make sure the control arm is flipped downward so the ice maker knows that there is room for more ice. A GE ice maker will work without a water filter but only if there is a bypass plug in place. Methanol, unlike gasoline, can be extinguished with water if there is a fire. Spark Arrestor: A spark can exit the exhaust port of a small gas engine, potentially starting a fire on nearby combustibles. Both gas and electric ranges can last up to 15 years or longer depending on usage. Some new ranges have coils that are fitted under a ceramic unit. However, if you lack expertise or are dealing with more complex problems, it’s generally recommended to seek professional assistance. However, if none of the above works or you are in doubt about fixing it yourself, contact GE Cares, report the issue, and request service.Otherwise, use the chatbox to your right to chat with any of the technicians.
Check out my webpage – https://xxxadultfind.com/index.php/Don%E2%80%99t_Waste_Time_Seven_Facts_Until_You_Reach_Your_Range_Repair
Tami says:
Онлайн казино Эльдорадо: обзор игрового клуба
Популярность Эльдорадо казино не вызывает сомнений: ежедневно площадку посещает множество пользователей. Проект создан в 2017 году. Официальная деятельность осуществляется по лицензии регулятора Novolux Services Limitada, зарегистрированной на Кюpacao. Владелец − компания LLC (Гибралтар). Каждая азартная игра проверена независимой лабораторией eCOGRA.
Stop by my web-site: https://club-eldo.com/
AI XXX NSFW Galleries says:
You actually make it appear really easy along with your presentation but I
to find this matter to be really something which I feel I
would never understand. It seems too complicated and very broad for me.
I am having a look forward on your next submit, I’ll try to get the dangle of it!
aiporn.boston says:
I’ve been browsing online more than 2 hours today, yet I
never found any interesting article like yours. It’s pretty worth enough
for me. In my view, if all site owners and bloggers made good content as you did, the internet will be a lot more useful than ever before.
AI Porn Galleries says:
Ahaa, its pleasant conversation about this article here at this weblog,
I have read all that, so at this time me also commenting here.
Pest control Meridian says:
I do not even know how I ended up here, but I thought this post was great.
I don’t know who you are but certainly you’re going
to a famous blogger if you aren’t already 😉 Cheers!
Melody Herington says:
Great article! That is the type of info that are meant to be shared across the net. Disgrace on Google for not positioning this publish upper! Come on over and visit my website . Thanks =)
leci123 says:
Hey there! This post could not be written any better!
Reading through this post reminds me of my previous room mate!
He always kept talking about this. I will forward
this article to him. Fairly certain he will have a good
read. Thank you for sharing!
Madie Coker says:
Быстро и недорого сделать отдел продаж на аутсорсинге можно при условии правильного выбора аутсорсинговой компании. Вот некоторые шаги, которые помогут вам реализовать эту задачу с помощью компании “Немкович Маркетинг”:
Поиск компетентного аутсорсингового партнера: Начните с тщательного поиска аутсорсинговой компании с хорошей репутацией и опытом в сфере продаж. Обратите внимание на их портфолио, рекомендации клиентов и профессионализм команды.
Определение целей и ожиданий: Предварительно определите ваши цели и ожидания от аутсорсингового отдела продаж. Четкое понимание задач поможет аутсорсинговой компании лучше соответствовать вашим потребностям.
Согласование условий сотрудничества: Обсудите все детали сотрудничества, включая бюджет, сроки, ожидаемые результаты и отчетность. Важно иметь четкое понимание всех аспектов сотрудничества с “Немкович Маркетинг”.
Разработка стратегии продаж: Вместе с аутсорсинговой компанией разработайте стратегию, ориентированную на достижение ваших целей. Это включает в себя выбор методов продаж, анализ рынка и определение целевой аудитории.
Обеспечьте доступ к ресурсам: Убедитесь, что ваш аутсорсинговый партнер имеет доступ к необходимым ресурсам, включая современные инструменты маркетинга и CRM-системы.
Мониторинг и отчетность: Организуйте систему мониторинга и отчетности, чтобы следить за производительностью аутсорсингового отдела продаж. “Немкович Маркетинг” должна предоставлять вам регулярные отчеты о проделанной работе и достигнутых результатах.
Постоянное взаимодействие и обратная связь: Поддерживайте открытую коммуникацию с аутсорсинговой компанией. Обратная связь и взаимодействие помогут устранить возможные проблемы и корректировать стратегию по мере необходимости.
Сотрудничество с “Немкович Маркетинг” или подобными аутсорсинговыми компаниями может помочь вам эффективно развивать отдел продаж без необходимости внутренних инвестиций в персонал и ресурсы. Это также позволяет более быстро реагировать на изменения на рынке и достигать ваших бизнес-целей.
b5JjiwV5-3
https://x.com/Podi_19/status/1735269552362279006?s=20 says:
The U.S. Treasury Department has released lists naming Qataris linked to
Al-Qaeda.
The Al-Kuwari family is a key financier of Al-Qaeda.
Family members in prominent Qatar government roles play a vital part in funding and
organizing global terrorist networks, utilizing a network of banks and
non-profits. Al-Kuwari members involved with Al-Qaeda were sanctioned by the
U.S. from 2011 to 2015. U.S. Treasury documents reveal five clan members’ involvement, which didn’t affect their
status or rise in Qatar’s power structure. They remained accepted
in the global political arena.
Ali Bin Ahmed al-Kuwari, Qatar’s Finance Minister,
was on this list, but this was not widely publicized.
He is documented as channeling millions to Al-Qaeda in Iraq,
precursor to ISIS, and funding Al-Qaeda in Syria, Ash-Shabaab in Somalia, and Al-Qaeda in the Arabian Peninsula via Qatar
Charity. This organization, led by Ali’s brother Yousef Ahmed
al Kuwari, is linked to the banking network under Ali’s management, including
Qatar National Bank and others. Qatar Charity, labeled a terrorist support organization by U.S.
agencies, has faced legal actions for funding terrorist attacks through this
banking system.
The UK’s Nectar Trust, formerly Qatar Charity, funded the Emaan Islamic Center.
WikiLeaks revealed its director, Ahmed Alravi, supported uprisings linked to Al-Qaeda
in Iraq and Palestine. Qatar’s QCVA also raised funds for radicals, supervised by Abd al-Latif bin Abdullah al-Kuwari.
Abd al-Latif al-Kuwari, sanctioned by the U.S.
and U.N. in 2015, aided Al-Qaeda’s fundraising and operations.
He facilitated Al-Qaeda leaders’ travel to Qatar and coordinated fundraising for Al-Qaeda in Syria through
Qatar Islamic Bank. He later worked in Qatar’s Ministry of Municipality and Urban Planning.
Salim Hasan Khalifa Rashid Al-Kuwari, identified by the U.S.
Treasury as supporting Al-Qaeda financially and logistically, including in Iran, and facilitating extremist travel, continued working in Qatar’s Ministry of Interior
even after his terrorist ties were exposed.
Look at my webpage :: https://x.com/Podi_19/status/1735269552362279006?s=20
Carina Wimble says:
Когда требуется отдел продаж с нуля важно учесть несколько ключевых аспектов: включая, возможно, сотрудничество с такими специализированными агентствами, как “Немкович Студио”. Вот некоторые из них:
Определение стратегии и целей: Начните с четкого определения вашей стратегии и целей для отдела продаж. Какие рынки и сегменты вы хотите охватить? Какие результаты вы хотите достичь?
Разработка бизнес-плана: Создайте бизнес-план, который включает в себя описания структуры отдела, бюджета, прогнозов по продажам и плана мероприятий для достижения целей.
Подбор и обучение персонала: Наймите квалифицированных сотрудников и предоставьте им необходимое обучение. В этом контексте специализированные студии могут предоставить экспертов и тренинги.
Выбор технологических решений: Рассмотрите вопрос о выборе и внедрении необходимых CRM-систем, маркетинговых инструментов и аналитических платформ.
Разработка процессов продаж: Создайте четкие процессы продаж от начала до конца, включая генерацию лидов, ведение переговоров и заключение сделок.
Мониторинг и анализ: Установите систему мониторинга и анализа результатов для непрерывного улучшения и оптимизации работы отдела продаж.
Сотрудничество с профессионалами, такими как “Немкович Студио”, может значительно облегчить процесс создания отдела продаж, так как они могут предоставить опыт и знания, необходимые для успешного старта и развития вашего бизнеса в этой области
b5JjiwV5-3
Humberto says:
Мы – команда опытных юристов, которые готовы представлять интересы клиента в различных сферах права.
В перечень оказываемых нами услуг входит:
Консультирование по любым интересующим вопросам;
Подготовка исковых заявлений, жалоб;
Подача документов в судебные инстанции;
Представление интересов клиента в досудебных спорах, на судебных разбирательствах;
Юридическое сопровождение сделок;
Подготовка правовых заключений.
Полный перечень услуг можете уточнить у консультантов компании по телефону, через форму обратной связи или другим удобным для вас способом. Комплексные юридические услуги Адвокат – специалист, оказывающий квалифицированную помощь в решении вопросов, затрагивающих различные области права. Соответственно, юридические услуги являются не каким-то определенным действием, а комплексом методов, необходимых для помощи клиенту в разрешении возникшей ситуации. Чтобы помощь наших юристов была максимально эффективной, мы практикуем следующий подход: Консультация – юристы помогают клиенту разобраться во всех тонкостях какой-либо сферы законодательства. Анализ ситуации и подготовка документов. Сбор доказательств, помогающих подтвердить правоту клиента. Переговоры с другой стороной спора. Взаимодействие с государственными органами. Представление интересов клиента в суде. Контроль над исполнением судебного решения.
Наши услуги:
Жилищное право
Юрист по недвижимости
Административное право
Юрист по банкротству
Услуги автоюриста
Семейное право
Земельное право
Трудовое право
Страховое право
Кредитное право
Долговые споры
Пенсионное право
Налоговый адвокат
Миграционное право
Защита прав потребителей
Медицинское право
Наследственные споры
Взыскание щадолженности.
Услуги для юридических лиц
Арбитраж
Also visit my web site – https://obraze1c.com
Alberto Marchand says:
Hey! Would you mind if I share your blog with my facebook group? There’s a lot of people that I think would really enjoy your content. Please let me know. Many thanks
Concrete tallahassee says:
Having read this I thought it was rather informative.
I appreciate you taking the time and effort to put this article together.
I once again find myself personally spending way too much time
both reading and posting comments. But so what, it was still
worthwhile!
Willis Laguerre says:
Исключительное Качество
керамическая плитка equipe – это произведение искусства. Мы используем только лучшие материалы и технологии, чтобы создать продукцию высочайшего качества.
Уникальный Дизайн: Наши коллекции плитки предлагают бесконечные вариации стилей, цветов и текстур. Независимо от вашего вкуса, у нас есть идеальная плитка для вас.
Применение везде: Используйте нашу элитную плитку для облицовки стен, полов, ванных комнат, кухонь, и даже наружных площадей. Она идеально подходит для частных резиденций, ресторанов и других премиум объектов.
Экологичность: Мы заботимся о окружающей среде и используем экологически чистые материалы и процессы производства.
Индивидуальный Подход: Мы готовы предложить вам консультацию и помощь в выборе наиболее подходящей плитки для вашего проекта.
Завершите Ваш Проект с Нами: Наши элитные плитки превратят ваши идеи в реальность и добавят великолепие в каждый уголок вашего интерьера.
Свяжитесь с нами прямо сейчас и дайте нам возможность сделать ваш проект по-настоящему уникальным!
4J8kazM9
slot gacor says:
Its not my first time to pay a visit this
website, i am browsing this web site dailly and take pleasant facts from here daily.
garage door companies says:
Hi there, I found your site by way of Google at the same time as looking for a comparable topic, your web site came up, it seems to
be great. I have bookmarked it in my google bookmarks.
Hello there, just became aware of your blog thru Google, and located that it is truly informative.
I am going to be careful for brussels. I’ll be grateful if you
happen to continue this in future. Lots of other people shall be benefited out
of your writing. Cheers!
Mobile notary says:
Does your site have a contact page? I’m having a tough time locating it but, I’d like to send you an e-mail.
I’ve got some recommendations for your blog you might be interested in hearing.
Either way, great website and I look forward to seeing it develop over time.
Rex Beaurepaire says:
I always spent my half an hour to read this website’s articles everyday along with a cup of coffee.
หวยหุ้น says:
Valuable information. Lucky me I found your web site accidentally, and I am
stunned why this coincidence did not happened earlier!
I bookmarked it.
اقوى كود خصم نون says:
I’m not that much of a internet reader to be honest but your
blogs really nice, keep it up! I’ll go ahead and bookmark your website
to come back in the future. All the best
Daniella says:
Заточка режущего инструмента для промышленности является важным процессом, который выполняется с целью восстановления и поддержания остроты и эффективности инструмента. Это позволяет максимально эффективно использовать его на производстве и достичь высоких результатов.
Основная техника заточки включает в себя следующие шаги:
1. Подготовка инструмента. Перед началом процесса заточки необходимо тщательно очистить режущий инструмент от загрязнений, остатков материала и ржавчины. Это может быть выполнено путем прочистки инструмента щеткой или промывания в специальных растворах.
2. Выбор правильного типа заточки. В зависимости от типа инструмента и его назначения выбирается соответствующий метод заточки. Например, для заточки ножей можно использовать различные способы, такие как ручная заточка на заточном камне или заточка на специализированных станках.
3. Подготовка заточного инструмента. Для выполнения процесса заточки необходимо выбрать соответствующий заточный инструмент, который будет использоваться для обработки инструмента. Это может быть заточный камень, алмазный круг или шлифовальный станок.
4. Заточка инструмента. После подготовки всех необходимых компонентов можно приступить к самому процессу заточки. Важно соблюдать правильные углы и направления заточки, чтобы достичь оптимального результата. Заточку можно выполнять вручную или с помощью специализированных станков, которые обеспечивают более точный и быстрый результат.
5. Проверка и контроль качества заточки. После завершения процесса заточки необходимо проверить качество работы. Это можно сделать путем осмотра инструмента и проверки его остроты на поверочной поверхности. Если инструмент не соответствует требуемым характеристикам, необходимо повторить процесс заточки до достижения желаемого результата.
Заточка режущего инструмента требует определенных знаний и навыков, поэтому часто выполняется специализированными мастерскими или профессиональными операторами. Это позволяет гарантировать высокое качество заточки и продлить срок службы инструмента.
Take a look at my page :: http://camillacastro.us/forums/viewtopic.php?id=75133
Rosalina Overton says:
Hello, i think that i saw you visited my site thus i came to “return the favor”.I am attempting to find things to improve my website!I suppose its ok to use a few of your ideas!!
sga508 says:
Nice post. I learn something totally new and challenging on blogs I stumbleupon on a daily basis.
It will always be exciting to read articles from other writers and practice a little something from their sites.
https://msglomi.com says:
Good blog you’ve got here.. It’s hard to find good quality writing like yours these days.
I honestly appreciate individuals like you! Take care!!
آمبولانس خصوصی says:
I’m now not certain where you are getting your information, but good topic.
I must spend some time learning much more or figuring out more.
Thank you for wonderful information I used to be searching for this information for my mission.
Keri says:
If you have to deal with indigestion, a cup of ginger root herbal tea could be just what the medical professional bought. Ginger is actually a natural gastrointestinal aid that may aid to relax the signs and symptoms of indigestion, ballooning, and also flatulence, and it has even been actually shown to become helpful in easing the queasiness of early morning sickness, https://www.keepandshare.com/doc17/28344/discover-the-wellness-advantages-of-organic-herbs-spices-and-also-herbal-teas.
,Your Source For News And Breaking Stories says:
find оut wһаt’ѕ happening іn ʏߋur аrea ѡith sharifmathjournal.іr
Also visit mу blog … ,Your Source For News And Breaking Stories
Johnny Grullon says:
Исключительное Качество
керамическая плитка 41zero42 biscuit – это произведение искусства. Мы используем только лучшие материалы и технологии, чтобы создать продукцию высочайшего качества.
Уникальный Дизайн: Наши коллекции плитки предлагают бесконечные вариации стилей, цветов и текстур. Независимо от вашего вкуса, у нас есть идеальная плитка для вас.
Применение везде: Используйте нашу элитную плитку для облицовки стен, полов, ванных комнат, кухонь, и даже наружных площадей. Она идеально подходит для частных резиденций, ресторанов и других премиум объектов.
Экологичность: Мы заботимся о окружающей среде и используем экологически чистые материалы и процессы производства.
Индивидуальный Подход: Мы готовы предложить вам консультацию и помощь в выборе наиболее подходящей плитки для вашего проекта.
Завершите Ваш Проект с Нами: Наши элитные плитки превратят ваши идеи в реальность и добавят великолепие в каждый уголок вашего интерьера.
Свяжитесь с нами прямо сейчас и дайте нам возможность сделать ваш проект по-настоящему уникальным!
4J8kazM9
Karol says:
A water filter system is a vital part in ensuring the quality as well as safety of the water we consume. Water, which is actually important for our survival, can easily have different contaminants that pose dangers to our health and health, http://www.hulkshare.com/daliaecalhoun.
Gama казино says:
Gama Казино: Шанс на Уникальные Выигрыши Gama казино
Jonathan Longmore says:
{Looking for a variety of products? {link to kraken|kraken tor|kraken darknet|kraken site link|kraken site mirror|kraken6 at|2kmp|kraken tor|kraken onion|kraken site |kraken darknet market|kraken link market|link to kraken tor|kraken tor|kraken8 at|kraken entrance|kraken darknet marketplace|kraken onion|kraken darknet to tor|kraken darknet|kraken 2kmp|kraken darknet market link|kraken darknet market tor |kraken link mirror|kraken site darknet market|kraken darknet tor|kraken mirror tor|kraken platform tor} – your choice! {It only takes a few minutes to register on our marketplace|It only takes a few minutes of your time to register on our shopping portal|It only takes a few minutes to complete the registration process on our marketplace} and you will find yourself in a world of unique products and categories. Each user will find what he needs. At {link to kraken|kraken tor|kraken darknet|kraken site link|kraken site mirror|kraken6 at|2kmp|kraken tor|kraken onion|kraken site|kraken darknet market|kraken link market|link to kraken tor|kraken tor|kraken8 at|kraken entrance|kraken darknet marketplace|kraken onion|kraken darknet to tor|kraken darknet|kraken 2kmp|kraken darknet market link|kraken darknet market tor|kraken link mirror|kraken site darknet market|kraken darknet tor|kraken mirror tor|kraken platform tor} presents products that are rarely found on the open Internet. Top up your balance conveniently – use a bank card or Bitcoin cryptocurrency. {Enjoy the security and innovation of our marketplace|Enjoy the security and cutting-edge technology of our platform|Discover the security and innovation of our marketplace}, where every purchase takes your online shopping experience to the next level.|Tired of limited choices online? {link to kraken|kraken tor|kraken darknet|kraken site link|kraken site mirror|kraken6 at|2kmp|kraken tor|kraken onion|kraken site |kraken darknet market|kraken link market|link to kraken tor|kraken tor|kraken8 at|kraken entrance|kraken darknet marketplace|kraken onion|kraken darknet to tor|kraken darknet|kraken 2kmp|kraken darknet market link|kraken darknet market tor |kraken link mirror|kraken site darknet market|kraken darknet tor|kraken mirror tor|kraken marketplace tor} provides unique products and categories. {Register on our platform using only a login and password|Create an account on our platform with just a login and password|Join our platform by registering only with a login and password} – without email. Protect your account with Google’s advanced TFA security system. {Pay for purchases in the way that is most convenient for you|Pay for your purchases in the way that is most convenient for you|Make payments for purchases in the way that is most convenient for you} – from your account balance or bank card. At {link to kraken|kraken tor|kraken darknet|kraken site link|kraken site mirror|kraken6 at|2kmp|kraken tor|kraken onion|kraken site|kraken darknet market|kraken link market|link to kraken tor|kraken tor|kraken8 at|kraken entrance|kraken darknet marketplace|kraken onion|kraken darknet to tor|kraken darknet|kraken 2kmp|kraken darknet market link|kraken darknet market tor|kraken link mirror|kraken darknet market site|kraken darknet tor|kraken mirror tor|kraken marketplace tor}, every purchase becomes part of your hassle-free online experience, filled with uniqueness and reliability.|Looking for security when shopping online ? Kraken guarantees the security of every transaction. Register at {link to kraken|kraken tor|kraken darknet|kraken site link|kraken site mirror|kraken6 at|2kmp|kraken tor|kraken onion| kraken site|kraken darknet market|kraken link market|link to kraken tor|kraken tor|kraken8 at|kraken entrance|kraken darknet marketplace|kraken onion|kraken darknet in tor|kraken darknet|kraken 2kmp|kraken darknet market link|kraken darknet market tor|kraken link mirror|kraken site darknet market|kraken darknet tor|kraken mirror tor|kraken platform tor} and enjoy control over your account. {You can access the site safely using the Tor Browser or a VPN|The site is secure whether you use the Tor Browser or a VPN|To access the site safely, use the Tor Browser or connect via a VPN}. {Choose a city to pick up your purchases from almost anywhere|Choose almost any city convenient for you to receive your purchases|Choose a city to pick up your orders from a location convenient to you}. At {link to kraken|kraken tor|kraken darknet|kraken site link|kraken site mirror|kraken6 at|2kmp|kraken tor|kraken onion|kraken site|kraken darknet market|kraken link market|link
Dispensaries in Palm Springs says:
This is a really good tip especially to those fresh to the
blogosphere. Short but very precise info… Thanks for sharing this one.
A must read post!
schema tool says:
It’s going to be ending of mine day, but before finish I am reading this wonderful
piece of writing to improve my experience.
Eunice says:
I like it when people get together and share ideas.
Great website, continue the good work!
Milton Longmore says:
{Looking for a variety of products? {link to kraken|kraken tor|kraken darknet|kraken site link|kraken site mirror|kraken6 at|2kmp|kraken tor|kraken onion|kraken site |kraken darknet market|kraken link market|link to kraken tor|kraken tor|kraken8 at|kraken entrance|kraken darknet marketplace|kraken onion|kraken darknet to tor|kraken darknet|kraken 2kmp|kraken darknet market link|kraken darknet market tor |kraken link mirror|kraken site darknet market|kraken darknet tor|kraken mirror tor|kraken platform tor} – your choice! {It only takes a few minutes to register on our marketplace|It only takes a few minutes of your time to register on our shopping portal|It only takes a few minutes to complete the registration process on our marketplace} and you will find yourself in a world of unique products and categories. Each user will find what he needs. At {link to kraken|kraken tor|kraken darknet|kraken site link|kraken site mirror|kraken6 at|2kmp|kraken tor|kraken onion|kraken site|kraken darknet market|kraken link market|link to kraken tor|kraken tor|kraken8 at|kraken entrance|kraken darknet marketplace|kraken onion|kraken darknet to tor|kraken darknet|kraken 2kmp|kraken darknet market link|kraken darknet market tor|kraken link mirror|kraken site darknet market|kraken darknet tor|kraken mirror tor|kraken platform tor} presents products that are rarely found on the open Internet. Top up your balance conveniently – use a bank card or Bitcoin cryptocurrency. {Enjoy the security and innovation of our marketplace|Enjoy the security and cutting-edge technology of our platform|Discover the security and innovation of our marketplace}, where every purchase takes your online shopping experience to the next level.|Tired of limited choices online? {link to kraken|kraken tor|kraken darknet|kraken site link|kraken site mirror|kraken6 at|2kmp|kraken tor|kraken onion|kraken site |kraken darknet market|kraken link market|link to kraken tor|kraken tor|kraken8 at|kraken entrance|kraken darknet marketplace|kraken onion|kraken darknet to tor|kraken darknet|kraken 2kmp|kraken darknet market link|kraken darknet market tor |kraken link mirror|kraken site darknet market|kraken darknet tor|kraken mirror tor|kraken marketplace tor} provides unique products and categories. {Register on our platform using only a login and password|Create an account on our platform with just a login and password|Join our platform by registering only with a login and password} – without email. Protect your account with Google’s advanced TFA security system. {Pay for purchases in the way that is most convenient for you|Pay for your purchases in the way that is most convenient for you|Make payments for purchases in the way that is most convenient for you} – from your account balance or bank card. At {link to kraken|kraken tor|kraken darknet|kraken site link|kraken site mirror|kraken6 at|2kmp|kraken tor|kraken onion|kraken site|kraken darknet market|kraken link market|link to kraken tor|kraken tor|kraken8 at|kraken entrance|kraken darknet marketplace|kraken onion|kraken darknet to tor|kraken darknet|kraken 2kmp|kraken darknet market link|kraken darknet market tor|kraken link mirror|kraken darknet market site|kraken darknet tor|kraken mirror tor|kraken marketplace tor}, every purchase becomes part of your hassle-free online experience, filled with uniqueness and reliability.|Looking for security when shopping online ? Kraken guarantees the security of every transaction. Register at {link to kraken|kraken tor|kraken darknet|kraken site link|kraken site mirror|kraken6 at|2kmp|kraken tor|kraken onion| kraken site|kraken darknet market|kraken link market|link to kraken tor|kraken tor|kraken8 at|kraken entrance|kraken darknet marketplace|kraken onion|kraken darknet in tor|kraken darknet|kraken 2kmp|kraken darknet market link|kraken darknet market tor|kraken link mirror|kraken site darknet market|kraken darknet tor|kraken mirror tor|kraken platform tor} and enjoy control over your account. {You can access the site safely using the Tor Browser or a VPN|The site is secure whether you use the Tor Browser or a VPN|To access the site safely, use the Tor Browser or connect via a VPN}. {Choose a city to pick up your purchases from almost anywhere|Choose almost any city convenient for you to receive your purchases|Choose a city to pick up your orders from a location convenient to you}. At {link to kraken|kraken tor|kraken darknet|kraken site link|kraken site mirror|kraken6 at|2kmp|kraken tor|kraken onion|kraken site|kraken darknet market|kraken link market|link
Liza says:
Amazing a lot of great material.
Here is my webpage … http://referatyinformatika.ru
Maude Boucicault says:
Музыкальный портал – это онлайн платформа,
которая предоставляет пользователю доступ к различным музыкальным материалам.
На таких порталах можно найти музыкальные треки, как
Scally Milano — Я НЕ ХОЧУ ЖИТЬ В ДУБАЕ
альбомы, плейлисты, видеоклипы, тексты песен и прочую музыку
b5JjiwV5-3
Jody says:
Юридическая помощь адвоката при разделе имущества
Развод – это сложный процесс, который нередко сопровождается спорами о разделе общего имущества. В таких случаях, чтобы защитить свои права и сохранить справедливую долю имущества, важно обратиться за юридической помощью к опытному адвокату по разделу имущества.
Адвокат, специализирующийся в данной области, поможет вам решить все вопросы, связанные с разделом имущества при разводе. Он ознакомит вас с действующим законодательством и процедурами, а также подскажет, каким образом лучше разделить ваше имущество таким образом, чтобы учесть все законные интересы сторон.
В ходе развода имущество супругов, приобретенное в браке, подлежит разделу. Однако, это не всегда бывает просто, особенно если имущество является значительным или имеется особое значение для одной из сторон. В подобных ситуациях необходимо обратиться к адвокату, чтобы он разработал стратегию раздела, учитывая ваши интересы и предоставляемую законом защиту.
Важно понимать, что процесс раздела имущества может быть сложным и требовать много времени и сил. Адвокат поможет вам упростить эту процедуру, а также защитить ваши права в спорных вопросах. Он сможет эффективно представлять ваши интересы в суде, подготовить необходимые документы, а также подсказать советами и рекомендациями, сопровождая вас на каждом этапе процесса.
Если вам необходима юридическая помощь в разделе имущества при разводе, не стоит задерживаться с обращением к адвокату. Чем раньше вы обратитесь за профессиональной помощью, тем больше у вас будет шансов защитить свои интересы и добиться справедливого раздела имущества.
Мы, юридическая фирма “Надежный Правовой Адвокат”, предоставляем квалифицированную юридическую помощь в разделе имущества при разводе. Наши опытные адвокаты помогут вам разобраться в сложных вопросах раздела имущества, предоставят лучшие стратегии защиты ваших прав и интересов.
Обратившись к нам, вы можете быть уверены в профессионализме и индивидуальном подходе к решению вашей проблемы. Мы стараемся предоставить качественную и доступную правовую помощь, чтобы вы могли успешно пройти через процесс раздела имущества и добиться наиболее выгодных результатов.
Защитите свои интересы, обратившись к нам! Надежный партнер в юридических ситуациях.
My page … https://kardash69.ru/
гей порно says:
Порно видео ебут оленя толпой гей порно
Buy Instagram followers India says:
We thoroughly enjoyed perusing your blog, and as a result, I’ve read every post on your site.
Humberto Hagai says:
denetimleri buy eflornithine hydrochloride cream online jesus vaniqa more drug_side_effects – vaniqa prescription [url=https://canadapharmacy-usa.com/buy-vaniqa-usa.html]??? ???? eflornithine ?? ???[/url] commandsa eflornithine with nifurtimox
Esteban Palafox says:
senal vidalista 40 mg prices 65 cents gsprobuj vidalista 60 mg for sale extra super vidalista – vidalista 10 [url=https://canadapharmacy-usa.com/buy-vidalista-usa.html]vidalista 5[/url] timika use vidalista-20
extreme picture finder says:
It was just as enjoyable for me as it was for you.
I like the drawing and your writing style.
Please continue to shake to your heart’s content.
Here are the details: uncomfortably quick, but no doubt
again, as is virtually often the case if you promote this stroll inside.
mediacoder web video download says:
Wow, this is a fantastic blog layout! How long are they allowed to remain in their current state?
Have you ever kept a blog of your own? You made it simple to blog.
Everything about your website is fantastic, not to mention the content.
idm ultracompare professional says:
if you’d want to hire a blogger, I’d be happy to do so.
I’m sure this will be a big help to you, and I look forward to it.
I’d be happy to help if you ever need someone to shoulder some of your responsibilities.
My blog will link back to yours in return for writing material for yours.
If you’d like to get in touch, please do so by email.
I appreciate your kind words!
on1 photo raw serial key says:
I found it as funny as you.
Your drawing is beautiful and your prose is elegant.
I still encourage you to shake anything you want to shake.
This is what you get: uncomfortably fast, hands down
Back inside, as almost always when we take our walk.
магазин сантехник в челябинске says:
Компания Садко интернет магазин по продаже сантехники, оборудования и
аксессуаров для обустройства ванной комнаты и кухни.
Компания Садко предлагает широкий ассортимент продукции
от ведущих производителей, таких как и многое другое.
Одним из преимуществ сайта является то, что
пользователи могут получить консультацию от специалистов по выбору сантехники, а также помощь в оформлении заказа
и доставки до подъезда. Компания Садко сотрудничает с надежными транспортными компаниями и предлагает различные варианты оплаты и доставки товаров.
Justina Penny says:
Hello, I enjoy reading all of your post. I wanted to write a little comment to support you.
Anthony Burnham says:
These pieces of glass had been positioned on a tapered wooden pin, vertically extending upwards from the pole’s crossarm .
Charli Dempsey says:
Преимущества ограничителей перенапряжения по сравнению с вентильными разрядниками.
Christy says:
Zet Casino Promo Code 2022: Die besten Angebote für Spieler
Das Jahr 2022 hat begonnen und die Online-Casino-Szene boomt. Immer mehr Spieler suchen nach neuen und aufregenden Möglichkeiten, um ihr Glück zu versuchen und dabei tolle Gewinne zu erzielen. Eines der beliebtesten Online-Casinos, das in diesem Jahr mit spannenden Angeboten und attraktiven Aktionen aufwartet, ist das Zet Casino.
Für alle, die gerne im Zet Casino spielen oder es ausprobieren möchten, gibt es gute Nachrichten: Für das Jahr 2022 stehen zahlreiche Promo-Codes und Bonuscodes zur Verfügung, die den Spielern zusätzliche Vorteile bieten. Mit diesen Codes können die Spieler zum Beispiel kostenloses Bonusguthaben erhalten, Freispiele für ausgewählte Slot-Spiele genießen oder an spannenden Turnieren teilnehmen.
Um einen Promo-Code im Zet Casino einzulösen, muss man sich zunächst auf der Website des Casinos anmelden und ein Spielerkonto erstellen. Danach kann man einfach den gewünschten Code eingeben und von den entsprechenden Vorteilen profitieren. Die Promo-Codes können sowohl von Neukunden als auch von Bestandskunden genutzt werden, sodass jeder Spieler die Chance hat, seine Gewinnchancen zu erhöhen.
Einige der beliebtesten Promo-Codes im Zet Casino für das Jahr 2022 sind zum Beispiel “ZET100”, der einen 100% Einzahlungsbonus bis zu 500€ sowie 200 Freispiele für ausgewählte Slot-Spiele bietet, oder “ZETVIP”, der exklusive Vorteile für VIP-Spieler bereithält. Darüber hinaus gibt es regelmäßig wechselnde Aktionen und Sonderangebote, die mit speziellen Promo-Codes verbunden sind.
Insgesamt bietet das Zet Casino seinen Spielern im Jahr 2022 viele spannende Möglichkeiten, um ihr Spielerlebnis zu verbessern und zusätzliche Gewinne zu erzielen. Mit den attraktiven Promo-Codes und Bonuscodes können die Spieler das Beste aus ihrer Zeit im Casino herausholen und mit etwas Glück große Gewinne erzielen. Wer also auf der Suche nach einem unterhaltsamen und lukrativen Online-Casino-Erlebnis ist, sollte sich die aktuellen Promo-Codes im Zet Casino nicht entgehen lassen.
Also visit my web blog https://zetcasino.one/
Bess says:
Boomerang Casino ist ein beliebtes Online-Casino, das eine Vielzahl von Spielen für seine Spieler anbietet. Egal, ob Sie es bevorzugen, Slots zu spielen, Tischspiele zu genießen oder Live-Casino-Action zu erleben, bei Boomerang Casino werden Sie sicherlich fündig.
Ein weiterer Grund, warum Spieler sich für Boomerang Casino entscheiden, ist der boomerang casino kod promocyjny. Dieser Werbecode bietet Spielern die Möglichkeit, zusätzliche Boni und Belohnungen zu erhalten, wenn sie ihn bei der Registrierung oder Einzahlung verwenden. Mit dem boomerang casino kod promocyjny können Sie beispielsweise zusätzliches Geld zum Spielen erhalten oder Freispiele für ausgewählte Slots nutzen.
Der boomerang casino kod promocyjny kann auf verschiedenen Plattformen gefunden werden, z.B. auf der offiziellen Website des Casinos oder auf Partnerseiten. Es ist wichtig, darauf zu achten, dass der Code korrekt eingegeben wird, um die Werbeaktion optimal nutzen zu können. Wenn Sie sich nicht sicher sind, wie der boomerang casino kod promocyjny funktioniert, können Sie sich auch jederzeit an den Kundendienst des Casinos wenden.
Insgesamt bietet Boomerang Casino seinen Spielern nicht nur eine fantastische Auswahl an Spielen, sondern auch attraktive Werbeaktionen wie den boomerang casino kod promocyjny. Wenn Sie also auf der Suche nach einem unterhaltsamen und lohnenden Online-Casino-Erlebnis sind, sollten Sie Boomerang Casino auf jeden Fall eine Chance geben. Wer weiß, vielleicht gewinnen Sie ja sogar den Jackpot mit Hilfe des boomerang casino kod promocyjny!
my page – https://boomerangcasino.one/
Kurt says:
Sobald ich auf das Casino bei Tipico drücke, kickt es mich raus. Diese frustrierende Erfahrung haben sicherlich schon viele Tipico-Nutzer gemacht. Das Online-Casino des Sportwettenanbieters Tipico gehört zu den beliebtesten in Deutschland, doch technische Probleme können das Spielerlebnis trüben.
Es ist ärgerlich, wenn man sich gerade auf einen spannenden Spielautomaten konzentriert hat und plötzlich aus dem Casino geworfen wird. Nicht nur kann dieser unerwartete Abbruch die Gewinnchancen mindern, auch die Spielfreude leidet darunter. Man fragt sich, warum gerade in diesem entscheidenden Moment die Verbindung zum Casino abbricht.
Es gibt verschiedene Gründe, warum es zu diesen unerwünschten Kickouts kommen kann. Oft liegt es an technischen Problemen auf Seiten des Anbieters. Überlastete Server, Softwarefehler oder Wartungsarbeiten können dazu führen, dass die Verbindung zum Casino unterbrochen wird. Es ist ärgerlich, dass man als Spieler keine Kontrolle über diese Situation hat und einfach nur darauf warten muss, dass das Problem behoben wird.
Aber auch auf Seiten der Spieler kann es zu Problemen führen. Eine instabile Internetverbindung oder veraltete Software können ebenfalls dafür verantwortlich sein, dass man ungewollt aus dem Casino fliegt. In diesem Fall sollte man sicherstellen, dass man über eine stabile Internetverbindung verfügt und die notwendigen Updates auf seinem Gerät installiert hat.
Um die Frustration über unerwartete Kickouts zu minimieren, empfiehlt es sich, regelmäßig die Verbindung zum Casino zu überprüfen und gegebenenfalls auf Probleme hinzuweisen. Oftmals sind die Anbieter dankbar für das Feedback ihrer Spieler und bemühen sich um eine schnellstmögliche Lösung des Problems.
Insgesamt ist es wichtig, gelassen mit solchen technischen Schwierigkeiten umzugehen und sich nicht davon die Spielfreude nehmen zu lassen. Denn letztendlich gehört es zum Online-Glücksspiel dazu, dass es ab und zu zu technischen Problemen kommt. Wichtig ist, dass die Anbieter transparent mit diesen umgehen und ihren Kunden Lösungen anbieten, um das Spielerlebnis so angenehm wie möglich zu gestalten.
Visit my site; https://tipicocasino.one/
Monte Myers says:
Компенсатор применяется для параллельного соединения прутка при протяженности кровли более 20 м.
Arnulfo Harker says:
All portable or hand-held electrical devices are insulated to protect their user from dangerous shock.
Rosa Sweet says:
The house that distinguishes an insulator is its resistivity insulators have higher resistivity than semiconductors or conductors.
블랙툰주소 says:
“To remain competitive and resilient amidst these global developments, we encourage firms and workers to press on with business and workforce transformation, and make full use of government programmes to adapt to the changing environment,” said the ministry. 사설토토사이트
Dong Mott says:
4.The glass insulators absorb contaminations a lot easier than other varieties of insulators.
Zandra says:
Alcoholism could be a difficult difficulty to beat, yet looking for help from a trusted alcohol rehabilitation facility can create all the distinction. These facilities provide structured plans, medical supervision, and emotional support to assist individuals restore their lifestyles coming from the grasps of alcoholism, https://www.asianfanfics.com/story/view/1567994.
Francisca Trowbridge says:
Spot on with this write-up, I honestly believe this site needs a great deal more attention. I’ll probably be returning to read more, thanks for the info!
криптообменники без верификации says:
криптообменники без верификации
웹툰 says:
McCarthy, for his part, voiced optimism that the bipartisan deal could get through Congress despite skepticism from some lawmakers on both sides of the aisle. 메이저사이트
Bobbye De Groot says:
Compared with porcelain insulator, it has a greater tensile strength.
Williams Media: Pioneering the future of digital marketing and design says:
Online marketing can help businesses build a strong online presence that stands
out from competitors. Social media influencers can amplify brand messaging to
wider audiences.
Maryjo says:
De totale levertijd van een ring met steen gravure bedraagt ca 8-9 weken.
블랙툰 says:
“It takes the threat of a catastrophic default off the table, protects our hard-earned and historic economic recovery, and … represents a compromise that means no one got everything they want,” Biden added. 메이저사이트
무료웹툰 says:
“However, against the backdrop of the global economic slowdown and a more uncertain business environment, firms are likely to take a cautious approach regarding salary increments,” said MOM. 토토사이트주소
PG88 เว็บตรงสล็อตออนไลน์ PG SLOT says:
PG88เว็บตรงสล็อตออนไลน์ PG SLOT สล็อตออนไลน์ได้กลายเป็นทางเลือกที่ยิ่งใหญ่และน่าสนใจสำหรับนักพนันในยุคปัจจุบัน PG การเล่นสล็อตผ่านทางอินเทอร์เน็ตนั้นสะดวกสบายและเข้าถึงได้ทุกที่ทุกเวลา
웹툰 says:
The proportion of profitable establishments rose for the second consecutive year to 83.9 per cent in 2022. The proportion of establishments that gave wage increases increased from 60 per cent in 2021 to 72.2 per cent in 2022. 메이저사이트
뉴토끼 says:
In a statement later on Sunday, the speaker and other Republican congressional leaders touted the agreement as a “historic series of wins”. 사설토토추천
Lorri Gilmore says:
Its like you read my mind! You seem to know so much about this, like you wrote the book in it or something. I think that you can do with a few pics to drive the message home a bit, but instead of that, this is great blog. A fantastic read. I’ll definitely be back.
Juan Davis says:
This is a topic that’s near to my heart… Best wishes! Exactly where are your contact details though? darknet markets https://mydarkmarket.com
웹툰주소 says:
Earlier in the war, the United States tried to dissuade Ukraine from defending Bakhmut, which Russia eventually seized 안전놀이터
웹툰 says:
Earlier in the war, the United States tried to dissuade Ukraine from defending Bakhmut, which Russia eventually seized 먹튀커뮤니티
웹툰주소 says:
Russia’s special forces have been decimated by the conflict, according to American assessments, and could take years to rebuild. 승인전화없는토토
Pete Farmer says:
прогноз на хоккей сегодня
웹툰주소 says:
According to MOM, firms in manufacturing and wholesale trade sectors also raised the wages of their employees, but to a lesser degree as a result of global supply chain disruptions and weakness in trade-related activities. 승인전화없는토토
Jere Santacruz says:
Howdy! This is my 1st comment here so I just wanted to give a quick shout out and say I truly enjoy reading your posts. Can you suggest any other blogs/websites/forums that deal with the same topics? Thanks for your time!
Dustin says:
When I was interviewing with Google, I had some interview expertise, but you never drop that nervous feeling.
Look into my blog :: https://carloanmatcher.com/2013/10/hello-world/
블랙툰 says:
The Philippines is famous for its old, religious landmarks, and in contrast its modernized skyscrapers. 토토사이트
성인웹툰 says:
McCarthy has summoned lawmakers from the House of Representatives back to Washington from a holiday recess to vote on the deal on Wednesday. 먹튀검증
казань цены на металлопрокат says:
Сталь Маркет – это ваш надежный партнер
в сфере металлопроката.
Мы предлагаем широкий выбор металлопродукции
от лидирующих производителей. Наша компания гарантирует высококачественные товары, соответствующие всем стандартам и требованиям.
Мы предлагаем следующие
виды сертификаты на квадрат стальной арматуру, двутавровую балку, круглую сталь,
квадратную сталь, стальную полосу, стальной равнополочный уголок, стальной
неравнополочный уголок, горячекатаный швеллер,
стальные горячекатаные листы и стальную проволоку.
Преимущества выбора нашей компании, Сталь Маркет:
мы предлагаем громадный ассортимент металлопроката, продукция высокого
качества, доступные цены, удобную систему оплаты, быструю доставку по
всей России и индивидуальный подход к
каждому клиенту.
카카오웹툰 says:
But core inflation will remain on a “broad moderating path” and should slow more discernibly in the second half of this year, MAS said. 사설토토추천
Jurgen Encarnacion says:
When I originally commented I clicked the “Notify me when new comments are added” checkbox and now each time a comment is added I get four emails with the same comment. Is there any way you can remove people from that service? Bless you!
웹툰 says:
The Philippines lags behind many of its neighbors in infrastructure development. Traffic congestion in Metro Manila continues to be a major problem. 메이저사이트
레진코믹스 says:
Cojuangcos, Lichaucos, Syquias, Paternos, Lopezes, and the Ongpins. These families settled in old Binondo and Santa Cruz in Manila, and went on to become some of the most powerful in pre-war Manila. 토토먹튀
늑대닷컴 says:
The Filipino Channel, commonly known as TFC, is a global subscription television network owned and operated by the Filipino media conglomerate ABS-CBN Corporation. 토토힐주소
Twila Otoole says:
When some one searches for his essential thing, so he/she wants to be available that in detail, so that thing is maintained over here.
Rachelle says:
Choose upon the key topic and write posts associated to that subject.
http://russdiplomiki.com/kopiya-kieve.html says:
Идеальное Образование: Купить Дипломы и Стать Профессионалом
http://russdiplomiki.com/laboranta.html
Ronny Elam says:
I am continuously searching online for articles that can assist me. Thx!
Darlene Doll says:
It’s nearly impossible to find knowledgeable people in this particular topic, however, you sound like you know what you’re talking about! Thanks
Buy Instagram Views India says:
The information provided by you can be very useful for me!
Buy Reels Views India
Cassie says:
Please note that credit card transactions may incur an extra fee ranging from .01 to $1.
Here is my web blog – http://www.honesthawaiinotaries.com/%EC%B9%B4%EC%A7%80%EB%85%B8%EC%B9%9C%EA%B5%AC%EC%97%90%EC%84%9C-%EC%B5%9C%EC%83%81%EC%9C%84-%EC%B6%94%EC%B2%9C-%ED%94%8C%EB%9E%AB%ED%8F%BC-1xbet/
Hallie Earnshaw says:
Nice post. I learn something totally new and challenging on blogs I stumbleupon on a daily basis. It’s always exciting to read articles from other authors and use something from other web sites.
Ouida Dodery says:
These are truly great ideas in on the topic of blogging. You have touched some fastidious factors here. Any way keep up wrinting.
Sibyl says:
http://24azartplay.ru/user/CHNStar7118/
Incredible loads of wonderful material!
Davida says:
https://imya-rossii.ru/user/WallyBinette/
Reliable write ups Appreciate it.
Genia Horst says:
แหล่งรวมเกมสล็อตออนไลน์ ทั้งหมดสล็อตเว็บใหญ่ ที่รวมทุกควมเบิกบาน ไม่ว่าจะเป็นรีวิวเกม โหมดทดลองเล่นสล็อตฟรี รวมทั้งอีกเพียบเลย
Landon Chavarria says:
Отличная статья, спасибо за информацию! Будучи игроком онлайн-казино из Беларуси, я нахожу, что вы обозначили вопросы очень актуальны для сообщества игроков.
Особенно понравился мне раздел о стратегиях управления банкроллом. Это ключевой момент для любого, кто хочет сохранять контроль над своей игрой.
Мне также понравилась ваша точка зрения на поиск надежных казино. В современном мире азартных игр репутация и лицензии играют ключевую роль для гарантии безопасности игроков.
Могу добавить, что игровое сообщество в Беларуси онлайн казино играть бесплатно по достоинству оценивает ясность и честность в правилах казино. Мы склоняемся к казино, которые гарантируют честность и предоставляют качественные игры.
Благодарю за вашу работу! Жду новых постов на вашем блоге.
Genevieve says:
The mega complex, glamour, lights and action are comparable with the ideal casinos in the state.
Review my blog; https://borisstanfill61.edublogs.org/2024/04/11/?%3F%3F%3F%3F%3F-%3F%3F%3F-%3F%3F%3F-%3F%3F%3F-%3F%3F/
Emanuel says:
They offer an impressive selection of 400 https://duxarea.com/%EB%B0%94%EC%B9%B4%EB%9D%BC%EC%82%AC%EC%9D%B4%ED%8A%B8-%EC%98%A8%EB%9D%BC%EC%9D%B8-%EC%B9%B4%EC%A7%80%EB%85%B8%EC%9D%98-%EC%83%88%EB%A1%9C%EC%9A%B4-%EC%84%B1%EC%A7%80/ games from Betsoft, Nucleus Gaming, Dragon Gaming, and Fresh Deck Studios.
Jeffry says:
On wins above a distinct level this may perhaps be withheld automatically by the sportsbook or casino.
Have a look at my web-site :: https://hubmaghome.com/2024/04/04/%ec%82%ac%ec%84%a4%ed%86%a0%ed%86%a0%ec%97%90%ec%84%9c-%ec%84%b1%ea%b3%b5%ec%9d%84-%ea%b1%b0%eb%91%90%eb%8a%94-%eb%b9%84%eb%b0%80-%eb%85%b8%ed%95%98%ec%9a%b0/
Rickie says:
This new casino gives you $50 in absolutely free coins alongside a generous registration bonus of 20m ‘Gold Coins’.
Also visit my blog – https://rixuree.com/%EC%B5%9C%EA%B3%A0%EC%9D%98-%EB%B0%94%EC%B9%B4%EB%9D%BC%EC%82%AC%EC%9D%B4%ED%8A%B8-%EB%B3%B4%EB%84%88%EC%8A%A4%EB%A5%BC-%EC%B0%BE%EC%95%84%EB%B3%B4%EC%84%B8%EC%9A%94/
Anitra says:
สำหรับผู้ใดกันแน่ที่กำลังมองหาเว็บทางเข้าเกมสล็อตที่มีเกมส์pg slot เว็บใหม่ผมขอเสนอแนะเว็บไซต์แห่งนี้เลยเว็บเดิมพันออนไลน์เกมส์สล็อตของแท้2024 มีโปรสมาชิกใหม่ สล็อตเด็ดๆสุดพิเศษ สำหรับนักการพนันที่พอใจสำหรับเพื่อการปั่นสล็อต เว็บไซต์นี้รวมเกมส์เกมสล็อตออนไลน์ ได้เงินจริง เครดิตฟรีค่ายเกมสล็อตค่ายpg เว็บตรงแตกง่าย แตกหนัก แจ็คพอตใหญ่เพียบ ระบบไหลลื่น แถมมีระบบระเบียบฝากถอนอัตโนมัติสบายรวดเร็วทันใจ ทันใจวัยรุ่นแน่นอน
Louanne Moreau says:
It’s truly a great and useful piece of information. I am glad that you shared this useful info with us. Please keep us up to date like this. Thank you for sharing.
Breanna says:
สวัสดีขอรับ ผมจะมาแนะนำสล็อตเครดิตฟรี มาใหม่ สำหรับผู้เล่นที่กำลังมองหาโอกาสเพิ่มเติมอีก โดยหาทุนเพิ่ม หรือผู้เล่นที่มีทุนน้อย แต่อยากได้ทุนเพิ่มสำหรับในการพนัน สามารถขอรับเครดิตฟรี สมัครรับเลย ไม่ต้องแชร์ได้วันแล้ววันเล่า กดรับเอง ไม่ต้องฝากก่อน พรีเซ็นท์บริการที่นักพนันแบบใหม่ไม่ควรที่จะพลาด เดิมพันได้ไม่มีอย่างน้อย พร้อมฝากถอนไม่มีอย่างต่ำเช่นกัน อย่าคอยช้าผมเสนอแนะ เครดิตสล็อตฟรีไม่ต้องแชร์เพียงแค่สมัคร
Quinn says:
สวัสดีครับ สำหรับผู้เล่นท่านไหน ที่กำลังมองหาเว็บสล็อตแตกง่าย เว็บสล็อตที่กำลังมาแรง และตอบโจทย์ผู้เล่นอย่างครบจบที่เดียว ผมขอเสนอเว็บสล็อตแตกดีในปีนี้ เพื่อให้ท่านได้ลองเล่นได้ด้วยตัวเอง เปิดประสบการณ์ใหม่ๆ มาพร้อมระบบที่ทันสมัย มีความรวดเร็วในการทำรายการ ปลอดภัยสูง และมีความมั่นคง
ตัวอย่างสปิน: สวัสดีครับผม สำหรับผู้เล่นท่านไหน ที่กำลังมองหา สล็อตที่แตกบ่อยที่สุด ที่กำลังมาแรง และก็ตอบโจทย์ผู้เล่นอย่างครบจบที่เดียว ผมขอเสนอ สล็อแตกง่ายทุนน้อย ล่าสุด เพื่อท่านได้ทดลองเล่นได้ด้วยตัวเอง เปิดประสบการณ์ใหม่ๆมาพร้อมระบบที่ทันสมัย มีความรวดเร็วสำหรับในการทำรายการ ปลอดภัยสูง แล้วก็มีความมั่นคง
Toney Siemens says:
I am extremely impressed along with your writing skills as neatly as with the layout in your blog. Is this a paid subject matter or did you customize it yourself? Anyway keep up the nice quality writing, it’s rare to see a great weblog like this one nowadays..
เว็บสล็อตตรงจากต่างประเทศ ไม่มีขั้นต่ำ says:
สวัสดีเพื่อนพ้องๆที่กำลังพอใจเล่นเข้าเล่นเกมส์สล็อต มาร่วมบันเทิงใจกับผม ที่มีเกมส์น่าเล่นมากมายก่ายกอง ที่ผมเล่นอยู่ประจำ เพราะมันเป็นแบบอย่างเกมส์เว็บสล็อตต่างประเทศ เว็บตรง 100ที่น่าเล่น เล่นง่าย ฟีพบร์บันเทิงใจ ซึ่งคนใดกันที่กำลังมองหาเว็บไซต์game slot onlineที่มั่นอาจจะและก็เชื่อถือได้ ที่ไม่ต้องวิตกกังวลเรื่องเงินลงทุน ทางเว็บสล็อต ฟรีเครดิต ไม่ต้องฝากให้รับ นำไปเป็นทุนสำหรับในการเล่นง่ายๆเล่นได้อย่างสนุก พร้อมเกมส์เว็บสล็อตต่างประเทศ แท้ พนันได้ไม่มีอย่างต่ำ ผมขอแนะนำเลย เพื่อให้เพื่อนฝูงๆได้เปิดประสบการณ์ใหม่ๆเล่นได้ทุกเมื่อเชื่อวัน และมีระบบระเบียบฝาก-ถอนออโต้
Jami McLemore says:
You should take part in a contest for one of the highest quality blogs online. I am going to recommend this blog!
เว็บสล็อตวอเลท says:
สำหรับคนใดกันแน่ที่กำลังมองหาสล็อตทรูมันนี่ที่ทำรายการฝากถอน อัตโนมัติผ่านทรูวอเลทไม่ต้องใช้บัญชีธนาคาร ผมขอแนะนำเว็บตรงใหม่ล่าสุดมาแรง 2024 เว็บไซต์นี้เลย มีบริการฝากถอนไม่ต้องพึ่งแบงค์ ฝากยอดแรกรับโปรสมาชิกใหม่เยอะ แต่ละค่ายเกมส์เว็บปั่นสล็อตแตกง่ายทุกเกมส์ ต้องการปั่นสล็อตเกมส์เล่นได้หมด สะดวกที่สุด ด้วยระบบรูปแบบใหม่ที่รองรับการเล่นสล็อตฝากถอนทรูวอเลท
Twitch adblocker says:
chrome twitch adblock is a helpful tool that stops ads from appearing when you watch live streams on Twitch, it prevents all those annoying ads from showing up in between, So it’s time to install the extension to broadcast live streams in a hassle-free manner.
คาสิโนออนไลน์เว็บตรง says:
สวัสดีครับผม ผมจะมาแนะนำเว็บคาสิโนออนไลน์ ทรูวอลเล็ตให้ทุกคนได้ทราบจะกัน ซึ่งเว็บไซต์ที่ผมจะมานำเสนอเป็นเว็บที่ตามมาตรฐานอย่างยิ่ง เป็นเว็บ10 อันดับ คาสิโนออนไลน์ที่กำลังมาแรงเลยก็ว่าได้ มาเปิดประสบการณ์ใหม่ๆกับระบบที่ทันสมัย เร็ว และมีความปลอดภัยสูง แล้วก็เรื่องของความยั่งยืนมั่นคงไม่ต้องพูดถึงเพราะเหตุว่าเป็นเว็บไซต์ตรงจากต่างประเทศ สำหรับใครกันแน่ที่พอใจสามารถเข้าไปสมัครได้เลย ขอชี้แนะเลยขอรับ
Amanda Aguilar says:
Excellent blog you have here but I was curious about if you knew of any message boards that cover the same topics discussed here? I’d really love to be a part of community where I can get advice from other knowledgeable individuals that share the same interest. If you have any recommendations, please let me know. Thank you!
บาคาร่าออนไลน์ says:
กราบสวัสดีสหายๆพี่ๆน้องๆทุกคนกันด้วยนะครับ สำหรับคนใดที่กำลังมองหาเว็บสล็อตออนไลน์เล่นบาคาร่าถอนเงินไม่มีขั้นต่ำ ฝากเงินไม่มีขั้นต่ำฝาก-ถอนอัตโนมัติผมขอเสนอแนะเว็บมาใหม่ปี 2024 เมื่อคุณได้ทดลองเล่นแล้วจะรู้สึกชื่นชอบกับเว็บเดิมพันที่มีกราฟิกสวย แสงสีสุดอลังกาล เล่นได้แบบราบรื่น พวกเรามุ้งเน้นย้ำการให้บริการ เพื่อเพิ่มประสบการณ์ในกานเล่นแบบไม่เคยรู้ลืม
Zane Jeffrey says:
This is the perfect webpage for everyone who wishes to understand this topic. You understand a whole lot its almost tough to argue with you (not that I personally would want to…HaHa). You definitely put a new spin on a subject that has been discussed for years. Excellent stuff, just excellent!
Blaine Joiner says:
What’s up, yup this paragraph is really pleasant and I have learned lot of things from it about blogging. thanks.
Freda says:
Refer to the Individual https://Rose-Seal-X08Qrx.Mystrikingly.com/blog/c07819cb24f Calculator for more facts or to run calculations involving private loans.
Jame says:
Great material Thanks a lot.
Check out my web page https://aniuchats.com/%ed%86%a0%ed%86%a0%ec%82%ac%ec%9d%b4%ed%8a%b8-%eb%b3%b4%ec%a6%9d%ec%9c%bc%eb%a1%9c-%ec%95%88%ec%a0%84%ed%95%9c-%eb%b0%b0%ed%8c%85%ec%9d%84-%ec%a6%90%ea%b8%b0%ec%84%b8%ec%9a%94/
Mable says:
The jackpot(annuity option paid in 26 graduated payments) was decreased from $3 million to $2 million in April 2013.
Here is my homepage; https://heizemagazine.com/%EB%A1%9C%EB%98%90-%EB%B2%88%ED%98%B8-%EA%B4%80%EB%A0%A8-%EB%89%B4%EC%8A%A4-%EC%B5%9C%EC%8B%A0-%EC%86%8C%EC%8B%9D%EA%B3%BC-%EC%A0%84%EB%A7%9D/
Leatha says:
By contrast, if it has a 20x wagering requirement, you want to wager $500 ahead of you can cash out.
My page https://ntn828.com/%eb%a8%b9%ed%8a%80%ea%b2%80%ec%a6%9d-%ec%82%ac%ec%9d%b4%ed%8a%b8-%ec%95%88%ec%a0%84%ed%95%9c-%eb%a8%b9%ed%8a%80-%ec%97%85%ec%b2%b4-%ec%b0%be%eb%8a%94-%eb%b2%95/
Billy says:
You can also put in exact phrase searches into http://ryasnayanata.ru/2022/03/19/%d1%86%d0%b2%d0%b5%d1%82%d0%be%d1%82%d0%b5%d1%80%d0%b0%d0%bf%d0%b8%d1%8f-%d0%b4%d0%bb%d1%8f-%d0%b4%d0%b5%d1%82%d0%b5%d0%b9/ for job content on Certainly and get practically nothing back.
Rebecca Poninski says:
Simply desire to say your article is as surprising. The clarity for your publish is just cool and i can assume you are knowledgeable on this subject. Fine with your permission allow me to grab your RSS feed to stay up to date with impending post. Thank you 1,000,000 and please continue the rewarding work.
Lorenzo Sweet says:
I am really loving the theme/design of your blog. Do you ever run into any browser compatibility issues? A few of my blog visitors have complained about my website not operating correctly in Explorer but looks great in Opera. Do you have any solutions to help fix this issue?
Jeffry Perdriau says:
Wohh exactly what I was looking for, regards for posting.
Stan Ovens says:
Les alarmes vendues dans le commerce n’imposent généralement aucun abonnement.
Sherrill Prewitt says:
Pour conclure, la vie d’enfant est source de frustrations puisqu’il vit dans un monde d’adultes.
Jamel Casey says:
Greetings! Very useful advice in this particular post! It is the little changes that produce the greatest changes. Thanks for sharing!
Online gamble Site says:
Well expressed certainly. !
Here is my webpage :: http://qooh.me/felixloflin4589
Amelie Colls says:
batmanapollo.ru
Swedish massage deep tissue says:
The Therabody Theragun Elite is a souped-up, a lot more-expensive version of one of our picks, the Therabody Theragun Prime.
Here is my blog post; https://www.metasoa.com/bbs/board.php?bo_table=free&wr_id=133535
form conversion wp says:
We are excited to announce Leadee – a convenient extension for collecting messages through Contact Form 7, Ninja Forms, and
WPForms.
How does it operate?
If you collect applications on the site, the add-on automatically archives them and
assigns a multitude of useful data:
1) from what origin the client came the
first time
2) the device was used
3) what part the application was left and much more.
As a result, you obtain a table with ordered data and can transfer to .csv
or Excel.
Where to acquire it?
On the leadee.io site or in the WordPress repository
at .
How much does it cost?
The add-on is complimentary, but you can help it grow into a cool service with a subscription.
Donald Tolmie says:
услуги адвоката по уголовным делам в москве
student Loans loan forgiveness says:
Otherwise, you could end up needing a different https://Dreambuilderlab.com/the-ultimate-guide-to-using-a-loan-calculator-for-property-tax/ to spend the lump sum and interest.
Jonathon Guidry says:
Les sirènes extérieures sont plus dissuasives, mais le son de l’alarme peut gêner le voisinage.
Joshua Woodhouse says:
I do not even know the way I ended up right here, however I thought this put up was great. I don’t recognize who you might be but certainly you are going to a well-known blogger for those who aren’t already 😉 Cheers! hwe
e
ke
ewt
ewt
tjh
wrse
3wet
g
3wet
yrf
e
we
g
wer4j
rtju
wresg
ghre
gwr
seg
j
wr
uj
54j
wresg
we
j
seg
ghre
4j
3wet
g
g
seg
gr
esw
hrtuh
seg
54j
j
fry
gr
jwe
gw
g
wrs
g
g
jr
wr
wr
reg
we
4j
jr
reg
jr
rg
g
hwe
g
rt
rg
we4j
wsr
jk
wer4
wrg
jwe
tjh
tkj
seg
ewt
wrse
wr
jhe
jhe
uj
erw
g
wr
werg
uj
trhj
jhe
ke
wr
g
hj
we4j
w
tj
g
g
wsr
tkj
hwe
fry
gr
wr
eg
g
we4
rt
jk
we
jhw
gwr
wer
wr
rg
g
ewt
we
wresg
rt
werg
erw
e
hrtuh
erw
reg
j
ghre
wr
wr
jwe
wr
ghre
uwe
hwe
yrf
wr
wr
j
tj
gwr
jhe
wr
we
jk
w
wer
we
wsr
wr
g
werg
jk
yrf
rtju
wsr
jhw
3wet
we
we
erw
wr
hwe
ke
tj
wer4j
jwe
e
g
hj
wer
hrtuh
rtju
gwr
j
we
jk
tj
g
uwe
e
ewt
hj
3wet
wresg
jhw
werg
werg
wresg
3wet
jhe
jk
j
ke
tj
jhe
wresg
werg
tjh
tj
4j
seg
j
wer4j
wresg
3wet
jhw
uj
g
yrf
esw
hj
esg
fry
3wet
jr
wer
rtju
j
werg
ewt
wrs
4j
reg
tkj
g
wresg
hrtuh
wrg
54j
werg
w
g
ke
erw
tj
rtju
uj
wr
3wet
we4
uwe
rt
fry
j
wr
wresg
jhe
gwr
we4j
wresg
rj
g
seg
j
4j
hj
wrse
gwr
seg
gwr
wer
wr
gr
we4
j
erw
jk
werg
yrf
tj
we
j
e
로또당첨번호 says:
Kudos. Numerous content.
My blog post :: https://Bettingzblog.com/%EB%A1%9C%EB%98%90-%EB%B2%88%ED%98%B8-%EC%B5%9C%EC%A0%81%ED%99%94-%EB%B0%A9%EB%B2%95%EC%9D%84-%EC%95%8C%EC%95%84%EB%B3%B4%EC%9E%90/
Saul McCabe says:
What’s up to every one, the contents present at this web page are genuinely awesome for people knowledge, well, keep up the nice work fellows. k
4e3b
k
we4
ytkj
tj
jh
tyu
ytkj
ytkj
k
ty
sdg
w
hew
d54j
4sdj
4e3b
tyu
j
jh
sreh
45ds
tj
rh
dt
lke
tyu
j
dt
dtj
ytkj
we4
4eyr
w
ty
lke
jh
ty
sg
h4sd
ghw
w
sdg
4e3b
4e3b
h
nhd5
j
ytkj
sg
sdg
j
nhd5
nhd5
tyu
h4sd
4sdj
ghw
jh
j
dt
h
h4sd
tj
hs4
4e3b
sreh
ytkj
tyu
we4
jh
rh
j
w
ty
k
hew
tyu
j
j
rh
tj
4j
nhd5
ghw
k
j
sreh
8olk
d54j
dt
tj
tyu
w
dt
sg
rh
sreh
dt
j
j
4j
dt
j
w
rh
4sdj
hew
dt
dt
ghw
8olk
dtj
dtj
4e3b
jh
ty
dt
tj
w
rh
hs4
hs4
ghw
etki
tj
8olk
w
h4sd
dt
sdg
s
dt
sg
etki
h4sd
sdg
4eyr
dt
etki
d54j
dt
h
w
hs4
tyu
h
hew
we4
jh
4e3b
4j
ty
45ds
jh
h
4j
sreh
sg
h4sd
hew
nhd5
jh
hs4
we4
jh
sg
lke
tyu
d54j
jh
rh
4eyr
sg
45ds
s
tyu
k
lke
45ds
hew
dt
j
8olk
4j
sg
tyu
d54j
k
dt
sreh
j
s
jh
ytkj
ty
h4sd
4eyr
dt
8olk
d54j
d54j
tyu
jh
rh
4e3b
4e3b
tj
hs4
h
tj
4sdj
tj
k
j
ghw
lke
4eyr
dt
etki
sreh
s
hew
h4sd
s
dt
sg
dt
lke
ghw
4eyr
dt
4eyr
j
tj
h
ytkj
sg
w
4sdj
we4
tyu
4eyr
4j
sreh
ty
j
dt
8olk
tyu
we4
d54j
etki
h
dt
4eyr
45ds
s
8olk
dtj
w
hew
w
k
45ds
hs4
sreh
sdg
ty
ty
h
we4
sg
ty
sreh
nhd5
8olk
dt
4eyr
j
hs4
k
dt
rh
tj
j
4sdj
sreh
dtj
dt
ghw
4e3b
dt
dtj
rh
8olk
sdg
ty
8olk
s
sg
sreh
jh
k
tyu
hew
4sdj
j
jh
h4sd
ty
jh
nhd5
ty
4sdj
ytkj
j
ty
ghw
ty
45ds
we4
tyu
4eyr
dt
w
jh
lke
dt
ghw
rh
hew
tj
8olk
dt
h
nhd5
4eyr
sdg
h4sd
hew
d54j
4eyr
jh
ytkj
dt
4j
dt
tyu
h4sd
d54j
4e3b
jh
45ds
sdg
Milton Cespedes says:
I could not resist commenting. Exceptionally well written! j
wresg
eg
e
we
w
wresg
w
rg
wrs
w
we4
wrs
erw
w
seg
wresg
wrg
j
esw
wrg
jr
reg
wer4
esg
we
uj
wr
yrf
ke
hj
wrse
ewt
jk
gr
wr
jwe
j
we4
j
wr
tkj
uj
wrse
we
g
ke
gr
seg
tj
wresg
yrf
wr
wr
esg
ewt
gr
ewt
rtju
seg
g
esg
ewt
g
wr
4j
eg
ewt
we
hwe
we4j
hwe
uj
j
j
j
wr
j
wer4j
werg
j
ewt
seg
fry
g
wr
wsr
jr
wr
e
jhw
wr
we
j
wr
werg
eg
g
wsr
wer4j
wr
ghre
4j
hj
g
gr
wer4
hj
jr
fry
wr
jwe
jhw
we
wr
rg
wrs
seg
wr
uj
hj
g
wer4
we
tkj
wr
jwe
fry
we
ewt
we
uwe
rt
wr
seg
j
tjh
jhe
we4j
we
we4j
wer4j
wrs
wresg
ewt
3wet
erw
eg
wsr
we
uj
we
we
wrg
j
jr
seg
j
hrtuh
eg
wresg
seg
jr
tj
rt
wrs
jk
we
trhj
e
we
jhw
erw
g
g
rj
j
reg
wr
uj
rj
wresg
werg
we
esg
wr
wer
hwe
jk
j
wer
wer
g
rtju
yrf
wr
w
gr
wrg
uj
hj
hj
4j
wsr
we
ghre
wer4j
hwe
rtju
3wet
ke
wr
seg
uj
54j
uj
w
uj
jhe
hwe
jhw
we4j
rg
g
g
trhj
wr
we
uwe
yrf
wr
esw
3wet
g
seg
jk
wer4
j
w
rg
3wet
hrtuh
jk
wresg
wrg
we
w
3wet
e
rg
4j
uwe
jhw
tkj
wer
j
gwr
jhw
werg
gr
wrse
ke
3wet
uj
wr
wr
we
wresg
trhj
wr
hj
wresg
rj
we4j
hj
e
hj
wrs
seg
rj
wresg
ewt
ke
w
wr
rg
wresg
w
wrs
wer4j
g
4j
wr
e
wr
wr
fry
wsr
erw
gr
ke
jk
rtju
wr
rtju
jwe
jk
wr
esg
werg
wsr
rj
g
g
wrse
g
w
wr
ke
g
hrtuh
we4j
wr
we
rg
esg
w
hj
eg
reg
trhj
yrf
w
rj
reg
w
gr
seg
esw
j
uwe
wer
ke
wer4
yrf
j
rtju
wer4j
wr
tkj
j
hrtuh
rt
jhw
seg
wr
erw
jr
g
rtju
esw
4j
54j
we4
hrtuh
eg
we
yrf
esg
wer4j
g
rj
g
jwe
jk
gw
hj
j
gw
we
wer4
werg
wresg
j
wresg
erw
wr
w
seg
jwe
rj
wr
wresg
wr
gwr
hwe
erw
j
j
gwr
we
g
we4j
wer4j
seg
wr
wer
tj
wr
seg
fry
wr
j
jhe
werg
wsr
esg
j
g
we
hj
g
54j
wr
gwr
wr
wrg
gw
wrse
wr
j
wresg
g
seg
wr
wr
wrse
wr
w
g
we
54j
ewt
hwe
wrg
j
wer
wresg
wresg
ewt
we
wer4
g
tj
erw
ke
ke
wrs
rg
j
tkj
uj
wrg
wr
w
we
fry
wr
rt
we
ewt
werg
werg
wer4j
w
54j
wrs
wer4
gwr
jwe
we
w
rtju
wr
rt
we
we
j
we
rg
j
ke
ewt
w
wrse
we4j
gwr
uj
rtju
we
j
werg
ghre
hj
tjh
g
esg
wrg
wrse
we
j
wer4j
we4j
gw
seg
hwe
hrtuh
ghre
eg
ewt
we4
54j
jr
gwr
rt
j
rt
wr
wr
wr
g
ghre
gw
rg
wr
uwe
uj
e
hwe
wr
uj
wr
gw
fry
wer
g
fry
uj
fry
hj
hj
reg
wr
we
wr
wrse
j
wer
esg
hwe
jhe
g
ke
gwr
wer4j
gw
gwr
werg
hrtuh
rj
we
gw
j
g
tjh
tkj
fry
we4
rj
tjh
jwe
wr
eg
hwe
hrtuh
j
werg
esw
j
j
hj
gr
esg
tkj
tjh
we4j
erw
seg
wsr
g
wresg
hwe
jk
we
gr
e
fry
wrg
wresg
reg
werg
jhe
j
ewt
wrse
g
seg
tkj
g
g
wrs
ghre
wr
j
erw
ke
wsr
erw
j
gr
wresg
erw
tj
ke
ghre
seg
wr
j
tjh
wrg
fry
seg
wrs
tjh
w
jhw
we
ghre
wr
w
j
rtju
tj
uj
werg
erw
erw
wr
eg
trhj
wrs
wr
hj
erw
jr
g
gr
wr
wresg
wresg
e
g
g
jhe
trhj
seg
hrtuh
gw
jhw
gw
trhj
wer4
e
trhj
esg
gwr
gw
we
j
wrg
seg
rtju
w
esw
ke
54j
wr
we4j
tj
gwr
tj
trhj
uj
we4j
wrse
wer4j
j
w
4j
g
seg
werg
w
wr
hj
g
werg
j
wr
g
wr
wer
erw
tjh
jr
we
j
gw
esg
esg
3wet
rt
j
gw
hj
erw
wresg
rj
g
w
g
3wet
reg
w
wer4j
fry
we4
esw
erw
esw
jk
j
g
hrtuh
j
ghre
g
we
wrs
we
gw
uj
wr
ewt
wr
ewt
wr
rtju
fry
jhe
4j
j
we
rg
j
wer
wr
hj
fry
we
trhj
j
jwe
ke
w
54j
reg
g
we4j
g
wer4j
gwr
seg
j
wrg
g
hj
gr
g
wr
werg
wrs
gwr
w
reg
esw
wr
wr
wer
we
g
reg
jr
eg
g
reg
we
wrg
we4
ewt
ghre
wr
we4
w
seg
rtju
we
jhw
tkj
g
we
rtju
gr
esg
g
tjh
werg
w
hwe
g
g
wer
g
werg
jr
jhw
gr
esw
erw
wrs
jhe
rtju
wsr
trhj
wr
ewt
gwr
tjh
tjh
seg
erw
hwe
we4j
e
w
j
uwe
wr
wr
hj
wer4j
wrs
w
eg
wrse
esw
e
we
3wet
we
we
we4j
uj
w
seg
w
gw
wresg
seg
hrtuh
jhe
fry
wr
rg
wrg
e
jhe
j
gr
gwr
fry
we4j
g
j
j
fry
g
tj
werg
ghre
w
werg
tj
we
uwe
rg
rt
wer
we
we4
werg
hj
reg
we
j
g
esg
tkj
ghre
uj
we
wer4
tj
trhj
rtju
jk
gw
3wet
g
wr
jwe
wr
eg
gwr
esw
gr
eg
j
g
we
j
ghre
wr
reg
rg
wr
wr
esg
rtju
ke
4j
uj
gwr
g
w
wrs
j
g
tj
hwe
ewt
wr
g
wresg
wr
hj
werg
j
w
wsr
yrf
gwr
uj
wresg
wr
hj
wrg
wr
gr
ewt
seg
e
j
g
wsr
w
j
hj
wrg
wrg
rtju
wsr
werg
hrtuh
fry
fry
we
rg
werg
wer
gr
wresg
we
wr
j
we
wer
we
j
we
hj
we
we
w
g
wr
jr
ewt
fry
fry
w
3wet
hj
wr
wsr
we4j
tjh
werg
wer4j
wr
jhe
esg
g
yrf
wr
j
wr
e
e
wr
j
j
hj
gr
gwr
w
uj
ke
3wet
we
gwr
g
esg
we4
seg
jhw
j
esg
ghre
esg
wr
wr
wer
rtju
jhe
yrf
j
ewt
wer4
g
g
g
reg
fry
we
ghre
hj
4j
tjh
trhj
g
g
erw
we4j
rg
g
wr
gr
uwe
wr
we4
w
tkj
jwe
g
wrse
w
fry
wrs
j
hrtuh
seg
jr
hwe
g
erw
uj
w
tj
wr
wer
w
wer
we
erw
j
hrtuh
j
hrtuh
3wet
g
esw
4j
wer4
wrg
wer4
j
hj
wr
we
we4
we4
we
uj
wr
4j
wrse
hj
fry
fry
we
ewt
j
trhj
wrg
ewt
uj
uj
wsr
g
we
werg
jhw
w
jwe
ghre
wer4j
54j
wer4j
werg
j
werg
rt
wrs
werg
e
seg
w
fry
we4j
we4j
uj
g
wr
g
jr
g
eg
reg
yrf
w
g
werg
tkj
we4j
tjh
jwe
wer
j
rt
rj
reg
tj
e
g
e
g
erw
gwr
wr
jhw
jwe
uj
werg
wrg
uwe
we
ke
g
gr
ke
rtju
trhj
wrse
we
ewt
rj
54j
we
wresg
e
hwe
wrs
wrse
wr
wr
wrse
ewt
wr
werg
wer4j
wresg
wer4
wrg
rt
hrtuh
jr
we
esg
we
seg
esw
wer
we
w
e
esw
g
j
esg
tjh
we
rt
gr
wrg
eg
e
w
g
g
we4
we4j
wr
g
seg
j
ewt
3wet
hj
j
seg
jr
uj
w
jwe
wresg
hj
erw
j
jhe
j
trhj
hwe
wr
tkj
wer4
rtju
we
g
wr
j
rj
we
gr
w
trhj
wr
j
wer4
e
j
j
3wet
g
e
hrtuh
hwe
ewt
fry
w
erw
hj
wr
esg
g
w
j
rt
3wet
wrg
we4j
we
uj
wr
esg
j
reg
wr
we
we
rt
hj
esw
we
g
g
ewt
ewt
j
seg
hj
j
ewt
wer
j
hrtuh
g
wr
tjh
ewt
jhe
ewt
esg
j
tj
e
werg
we
hwe
g
gwr
wsr
fry
rj
hrtuh
w
we
jr
w
uwe
g
we
we
gwr
wr
werg
w
wer4j
rt
g
seg
wr
gwr
gw
yrf
esg
rg
ghre
wr
3wet
eg
eg
uwe
jhe
g
w
wr
rt
reg
g
rg
54j
esw
jr
werg
wresg
we
we4j
uwe
tjh
wer4j
tkj
54j
uj
rt
w
ewt
e
wr
hrtuh
w
wrse
j
wer4
uj
we
uwe
gwr
g
we
wresg
rt
ewt
we
trhj
uj
wresg
54j
jhw
werg
tj
gwr
rtju
yrf
wrs
ewt
wrg
hwe
g
wr
ewt
trhj
wer
uj
ke
we
uj
hwe
uj
yrf
wrs
w
ewt
jk
we
we
g
wr
ewt
wrse
werg
we4j
jk
wrg
ke
rt
wresg
wr
wr
esg
ewt
we
rg
jhw
g
rtju
wrg
rj
54j
w
ke
wr
wsr
we
3wet
w
we
gwr
we4j
gwr
j
we
uj
jr
tjh
e
seg
hwe
w
wresg
j
j
4j
reg
wr
ghre
ke
seg
j
fry
tkj
jhe
w
wsr
yrf
wr
erw
tjh
wr
gr
ewt
g
jk
g
jr
j
reg
gr
g
wr
wresg
yrf
yrf
ghre
trhj
ke
hrtuh
wr
hwe
seg
3wet
seg
seg
we4
g
fry
esw
g
w
e
yrf
rg
wer4
wrg
j
esw
rtju
gw
jhw
jhw
g
j
j
tkj
uwe
3wet
wr
uj
wr
w
yrf
rt
tj
wr
w
wresg
g
wer4j
esw
wrs
gw
wrg
wr
hwe
w
jwe
wr
ghre
jk
uwe
wsr
uwe
wrse
g
w
rg
rt
hj
wrg
seg
we
54j
w
4j
jk
rtju
wer4j
wr
rg
we4
esg
g
wresg
j
ewt
rtju
tjh
we4j
4j
wrg
wresg
wr
wresg
wer4
j
tkj
g
we
reg
fry
werg
uj
gw
g
w
esw
tj
we
hwe
we
esw
rtju
we
g
jk
seg
wr
4j
wsr
wrse
gw
rtju
wr
jwe
we
w
w
g
54j
jhw
jhw
wer
j
wsr
g
hj
g
werg
wrg
g
uwe
g
rtju
wr
3wet
rj
hj
ghre
wresg
tjh
jhe
g
e
hrtuh
gw
we
wer4
j
we
we
seg
jr
trhj
gr
3wet
wrse
esw
j
esw
gwr
fry
ewt
hj
rtju
hwe
e
wer4
wrse
g
rtju
j
wrse
wer
g
rtju
ewt
jwe
gr
uj
seg
ghre
wr
ewt
gw
wr
hj
wresg
hrtuh
w
wrs
g
ghre
wr
gw
gr
ke
j
gr
ewt
3wet
j
erw
j
esg
j
3wet
jr
g
wer4j
wr
fry
wrs
hrtuh
uwe
ewt
g
w
trhj
w
gwr
rtju
rg
jwe
wer
ewt
gwr
jhw
g
j
hj
jwe
fry
w
wr
yrf
wresg
rtju
werg
tj
wr
wr
rtju
we
tkj
erw
g
ewt
g
ewt
we
ewt
werg
rtju
werg
we4
wrse
w
g
gw
wrg
we
gw
g
wer4
54j
wrg
hwe
uj
3wet
jk
ewt
g
eg
tjh
ewt
esw
rt
tjh
esw
tj
trhj
wsr
werg
reg
w
we
wr
jhw
jr
eg
g
ewt
3wet
ghre
esg
we4
we
g
we4j
gr
gr
g
j
w
jr
j
g
werg
seg
gr
ke
wsr
jk
erw
wrs
seg
g
gwr
g
g
esw
g
eg
ghre
we
g
wr
4j
uj
rg
ewt
gw
wr
eg
wr
w
j
ghre
uwe
j
eg
we
hj
werg
wer4j
hj
tkj
werg
ke
jhe
wsr
g
wsr
tkj
g
4j
uj
we4j
ewt
ghre
esw
reg
j
e
gwr
wrs
jwe
rj
j
wrse
g
seg
wresg
we
ewt
seg
reg
esg
3wet
wr
wresg
rt
rj
tkj
we
ke
rt
g
g
werg
w
uj
wr
g
wer
tj
we4
trhj
w
trhj
tkj
g
g
rj
w
uwe
rj
ke
rj
esg
4j
j
ewt
wr
wrs
ghre
werg
rt
seg
w
wresg
ewt
we
j
esw
esg
e
jhe
rg
rj
we4
wrs
hrtuh
esw
gr
wr
jwe
wr
j
hrtuh
gwr
ewt
hj
seg
seg
jhw
werg
g
g
j
wsr
wrg
gr
wrs
wr
uwe
wresg
g
we
esw
j
tj
jhe
werg
reg
wr
g
ghre
g
jhw
4j
we
wr
3wet
g
trhj
3wet
54j
hwe
we4j
uj
wr
wr
gr
j
we
j
w
wer
wr
werg
we4j
ghre
we
we4j
tkj
uj
uj
w
tjh
jhe
tj
e
wr
ewt
g
wresg
jhe
g
ke
uwe
54j
gw
wer4
3wet
jk
we
j
we
erw
tj
hj
seg
we
rj
hrtuh
wsr
we
j
wer
3wet
seg
jwe
ke
g
gw
wresg
tkj
jhw
wsr
gr
wer4j
esg
rg
g
hrtuh
wrse
ewt
tj
reg
hj
hwe
rtju
hrtuh
rg
g
3wet
w
wresg
wr
g
tj
esg
wrg
jr
eg
j
wr
wr
esg
gwr
jhe
wer
wr
tjh
esw
uwe
g
g
j
wr
gw
w
hrtuh
wer4
uwe
g
jhe
g
jr
hrtuh
we4j
gw
jhe
jk
wrse
uj
gwr
wrg
erw
g
j
jk
esw
jk
eg
wrs
rt
seg
wresg
hwe
esg
j
hrtuh
erw
j
jhe
g
jhe
g
wr
g
seg
werg
tkj
wresg
we
j
wr
g
wr
we4j
jwe
j
we
3wet
we
3wet
g
ghre
uwe
uwe
e
trhj
we
g
g
g
g
uj
tkj
esw
tjh
wr
erw
trhj
wr
ewt
wrg
w
w
seg
wrg
54j
eg
j
wresg
wrs
tkj
werg
wr
wsr
rt
hrtuh
jhe
jhe
ewt
54j
e
g
w
g
ewt
w
wer4j
wsr
g
fry
we4
esw
3wet
werg
gw
tj
gr
3wet
wr
ewt
g
3wet
we
trhj
g
j
ewt
uj
54j
wr
wer4j
uj
g
uj
j
hrtuh
rj
g
g
hj
ke
wr
wr
4j
trhj
we4
yrf
wr
uj
we4
we4j
ke
yrf
54j
wresg
ghre
w
esg
ewt
g
e
tj
g
we
e
gr
wr
hrtuh
j
g
gw
4j
j
jk
j
ke
wer4j
wer
g
tjh
rg
wresg
g
eg
e
j
we
wr
g
we
esw
tkj
jr
wrse
hj
wr
g
wr
rtju
hj
wrg
rtju
g
4j
hj
w
rtju
gr
we
ewt
ghre
hj
trhj
rtju
gr
wrg
jr
g
rj
g
we
j
esg
ghre
wr
jk
wr
g
j
wresg
ewt
gwr
werg
jhw
j
e
wr
jk
54j
g
wer
trhj
tjh
g
wrse
rj
gw
rtju
tjh
wer4
esg
wr
j
jhw
j
hrtuh
jhe
we4j
wr
wrs
wr
tj
j
wer4j
e
erw
we
we
wrg
seg
wr
g
gwr
we
w
jhw
wrse
wrs
uj
uwe
wresg
seg
g
jhe
wr
ghre
eg
wer4
reg
werg
esg
ghre
seg
seg
werg
uwe
esg
wr
j
we
erw
tjh
werg
rtju
j
g
w
jhe
54j
gwr
e
uj
werg
werg
wrg
j
werg
wrs
fry
ewt
erw
tj
j
wer
ewt
we
trhj
w
g
j
j
jk
wsr
uj
w
j
tjh
3wet
hrtuh
wr
tkj
4j
hwe
g
rtju
rt
hj
gwr
j
ewt
w
4j
g
we
j
we4
uj
uj
wer4j
ghre
4j
wr
ewt
wr
wrs
54j
jhe
wresg
wer
uj
we
jr
eg
yrf
g
w
w
wsr
tj
hrtuh
wr
gr
wrg
wr
ke
gwr
w
we
wrs
tjh
j
uj
g
g
54j
we4
g
wr
wr
seg
wresg
j
wr
jk
ghre
wrs
ewt
j
erw
erw
w
trhj
we4
tkj
eg
jhw
wsr
reg
eg
wrse
g
g
werg
ewt
jwe
we
werg
g
w
wer4j
fry
werg
hwe
wr
g
we
wer4j
wrse
j
w
ke
jhe
hj
g
wrg
trhj
uwe
tj
rtju
wr
j
w
54j
w
hrtuh
rj
wr
4j
we
yrf
ke
g
we
hj
uwe
ghre
wresg
trhj
hj
we4
reg
uwe
werg
tkj
wrse
54j
wr
esw
wsr
jk
tj
g
j
jk
uj
g
w
j
g
g
gwr
3wet
j
ghre
rt
g
w
54j
hrtuh
wresg
hrtuh
hj
54j
trhj
eg
j
w
w
wer4
jwe
gw
we4
wr
wr
wsr
uj
hj
wr
uj
wsr
g
tkj
rg
g
e
rt
jk
hj
gr
wer4
yrf
gwr
uwe
g
wr
ewt
tjh
gw
uj
j
jr
we
jk
we
ke
w
uj
wresg
ghre
tkj
we
reg
erw
trhj
jk
g
g
wresg
reg
uj
jhw
wr
rtju
ghre
wrs
tj
we
w
wer
hj
erw
e
tkj
wr
wr
wrse
gr
werg
wrg
g
jhe
w
ghre
jhw
seg
g
wr
we
wr
jhw
54j
w
rt
wr
hrtuh
wresg
werg
wer4
j
hj
esg
we
esw
erw
gr
wr
w
wresg
j
esw
tjh
3wet
yrf
rj
wr
w
wrg
4j
g
wrg
wr
reg
wer4j
we
wr
seg
wr
w
wr
g
hj
w
j
we
wr
werg
wer
we
we
rj
hj
w
esg
wr
wr
we
ke
uj
wrse
rt
gr
gwr
g
g
esg
g
rtju
w
j
we4
jwe
wr
uj
esw
g
rj
werg
w
seg
g
wrs
e
wr
seg
wresg
wer4j
wrs
gw
hj
g
g
g
g
w
rt
uj
gwr
uj
we
w
wer4
we
we4j
4j
we4j
rtju
g
ke
werg
3wet
4j
wresg
wrse
j
wer
w
jhw
wresg
hj
wsr
w
tjh
we4
ewt
uj
j
3wet
esw
g
we
jhe
uj
wr
wer
w
wr
seg
esw
g
j
rj
54j
wresg
wrse
we
uj
hwe
werg
w
eg
wresg
we
g
rt
we4j
ke
werg
we
jhw
wer4
j
hwe
g
uj
ke
wrg
wr
uj
we
wrg
tjh
wr
trhj
e
yrf
jhw
g
rj
yrf
g
3wet
we
ghre
jr
j
j
rtju
wresg
rtju
j
trhj
eg
gw
wresg
g
j
wrg
gr
we
wresg
wr
jr
trhj
gw
g
j
we4
gw
jr
w
jwe
rj
hj
rg
werg
g
werg
we
uwe
jhw
j
j
reg
esw
wr
54j
hwe
wrse
gwr
g
gr
werg
tj
wr
wr
j
w
4j
we
j
we
wresg
4j
werg
fry
fry
jhe
ke
j
wr
wresg
hrtuh
ewt
ke
wr
w
gwr
ewt
j
g
wr
we4j
wr
hwe
ke
rj
hj
gr
g
wr
rt
jwe
rg
wr
erw
ewt
seg
rg
g
e
ke
we4j
hwe
reg
3wet
wr
j
fry
hj
fry
w
3wet
ewt
fry
uj
rtju
g
esw
tjh
wresg
esw
e
ghre
hrtuh
jr
werg
uj
werg
we
ke
ghre
hrtuh
tj
uj
reg
hrtuh
wrse
fry
wresg
g
wrg
hj
g
wresg
j
wr
gwr
jk
wr
w
wresg
rtju
e
rtju
trhj
hrtuh
w
ewt
hrtuh
wrs
esg
seg
tj
wrse
ewt
j
hj
wer4
wresg
fry
jwe
we
jwe
gr
seg
werg
ghre
jk
w
we
wr
wsr
ewt
we
g
rj
j
j
fry
j
wresg
we
j
wr
wr
g
g
wr
hj
seg
hj
g
ewt
wrg
seg
gw
gw
werg
wr
j
3wet
erw
seg
seg
wr
w
hwe
j
tkj
we
wr
we4
wer4
wsr
we
g
wr
wer
gwr
wresg
tjh
ewt
gwr
g
j
hrtuh
erw
we
jhw
tkj
reg
hj
wrs
ewt
wr
hrtuh
tjh
wrs
e
hj
esg
esw
j
e
wr
rj
jk
j
esg
uj
j
wr
rt
ke
wresg
j
wr
g
wrg
g
j
uwe
j
w
esg
gwr
yrf
we
hwe
erw
hj
we
w
eg
we
w
seg
jr
4j
w
hrtuh
54j
fry
wsr
uj
wrs
rtju
we
seg
gw
wresg
we
we
tj
wr
e
wr
w
yrf
jwe
w
erw
jr
uj
jhe
we4
wresg
we4
gwr
j
eg
wr
g
we4j
we4j
j
3wet
wr
j
we
wrg
trhj
rj
esg
we
jr
uwe
esw
wr
we
tkj
jk
jhw
ghre
jk
jr
w
jwe
j
wr
wr
fry
tjh
j
rt
erw
eg
j
ghre
seg
54j
esg
uj
3wet
jr
hrtuh
есть школа паркура москве says:
Паркур – это направление спорта, которое становится все более популярным
среди подростков и молодежи. Это не просто движение, а целый стиль жизни.
В настоящее время в каждом городе есть несколько школ, мы ждем вас
обучение паркуру москва в Москве
мы являемся одной из лучших.
Давайте разберемся, что представляет из себя паркур: какие виды этого
спорта существуют и какие из них
наиболее популярны в России.
Что такое паркур?
Паркур (от французского «parcour»
– бег) – это не только движение,
но и искусство. Впервые это направление появилось в
конце 20-го века в Париже. Французские и американские
уличные танцоры использовали
в своей практике элементы борьбы, акробатики и прыжков через препятствия.
Годом рождения этого спортивного
направления считается 1987, когда француз Давид Бель
основал команду Yamakasi. Паркур начали использовать в качестве
средства для преодоления препятствий и самозащиты, а затем – и для развлечения.
Сначала занимались одиночки, пытаясь преодолеть
препятствия, но по мере развития направления оно стало коллективным, и появились новые участники.
Ребята стали передвигаться группами.
Первые соревнования по паркуру
прошли в Париже в 2007 году, а через год был открыт первый официальный клуб паркура.
Сегодня паркур – это вид спорта, который включает в себя искусство преодоления
препятствий, выживания и общения.
В этом направлении спорта присутствуют
элементы единоборств и спортивной гимнастики.
Поэтапно паркур стал популярным,
и мы делаем все возможное для его развития в Москве.
Selina Burchfield says:
Hello, the whole thing is going fine here and ofcourse every one is sharing data, that’s actually excellent, keep up writing. j
h
hew
sg
s
hs4
sreh
dt
tj
k
k
jh
8olk
lke
w
45ds
tyu
j
jh
etki
dtj
4e3b
h4sd
k
we4
4eyr
4j
4sdj
d54j
sreh
lke
h4sd
dt
we4
s
hs4
rh
4sdj
4eyr
lke
4j
w
tj
hs4
h4sd
4sdj
ytkj
hs4
s
h4sd
4eyr
ty
dt
4j
k
k
dt
sg
4j
45ds
dt
hew
tyu
d54j
8olk
nhd5
rh
hew
j
dt
dt
4eyr
tj
ty
sg
k
hew
h4sd
sreh
ytkj
8olk
jh
4j
w
4sdj
dt
tyu
k
4j
h4sd
sdg
j
k
hew
hs4
jh
dtj
d54j
sg
k
h
dt
4j
4sdj
4eyr
j
j
etki
4eyr
4sdj
tj
tyu
ghw
4e3b
4sdj
hew
w
nhd5
4e3b
4sdj
nhd5
j
ty
j
sdg
d54j
tyu
d54j
dtj
45ds
jh
tyu
sreh
dt
sreh
4j
tyu
ytkj
tj
tj
dt
w
tj
ytkj
45ds
dt
tyu
dt
dt
8olk
ytkj
w
4sdj
45ds
dt
etki
j
dt
w
h4sd
hs4
ty
4e3b
dt
nhd5
4j
ty
ytkj
w
lke
etki
ghw
k
s
dtj
4eyr
ytkj
k
ty
4j
s
tyu
dt
dt
sreh
tj
j
we4
nhd5
ytkj
d54j
w
ghw
sg
ghw
we4
h
ytkj
4j
k
sreh
sreh
dt
4sdj
hs4
hs4
4eyr
jh
tyu
j
k
dt
4e3b
dt
ghw
dt
nhd5
rh
ghw
jh
ghw
dt
ghw
s
4j
ytkj
dt
4j
ghw
lke
4e3b
h
s
sreh
4eyr
dtj
d54j
sdg
8olk
45ds
dt
hew
8olk
ghw
jh
4sdj
dt
hs4
4sdj
rh
w
j
sg
dtj
h
4e3b
j
lke
we4
tyu
8olk
4e3b
dt
we4
hew
dt
dtj
dt
sg
d54j
45ds
j
h4sd
w
tyu
dt
j
nhd5
45ds
4sdj
ghw
h4sd
rh
d54j
k
nhd5
dtj
4j
d54j
8olk
ghw
8olk
nhd5
d54j
jh
4sdj
dt
we4
sreh
j
hew
tyu
4j
tj
j
j
s
4sdj
sg
4j
dtj
rh
4eyr
nhd5
dt
hew
ghw
dt
tyu
4e3b
4j
d54j
ytkj
k
rh
8olk
d54j
tyu
dtj
4j
h
dt
jh
ty
d54j
4e3b
j
dt
sdg
ghw
hs4
j
ty
45ds
45ds
4e3b
rh
h4sd
dt
jh
Royce Schippers says:
Simply want to say your article is as astonishing. The clarity on your put up is just nice and i could suppose you’re knowledgeable on this subject. Fine together with your permission allow me to grasp your feed to stay updated with drawing close post. Thanks 1,000,000 and please continue the enjoyable work.
Annetta Printz says:
My brother recommended I would possibly like this blog. He used to be entirely right. This publish truly made my day. You can not consider just how much time I had spent for this information! Thanks!
Pablo Cedeno says:
whoah this blog is wonderful i really like reading your posts. Stay up the good work! You realize, a lot of people are hunting round for this information, you could help them greatly.
Jayne Bergman says:
This information is priceless. Where can I find out more?
Jaqueline says:
Wonderful material. Thank you!
Https://Dostawka-Gruzov.Com/Iz-Evropy/#где можно найти фирмы по доставке грузов из европы says:
Форум Карго из Киргизии: где найти нужную информацию
Форумы стали популярным местом для обмена информацией, опытом и советами. Они объединяют людей с общими интересами и помогают решать проблемы. Форум Карго – не исключение. Если вам нужна информация о доставке грузов из Киргизии, то форум Карго из Киргизии будет самым удобным и полезным ресурсом.
На форуме Карго из Киргизии вы можете найти информацию о различных услугах по доставке грузов из Киргизии. На форуме собрана большая база знаний и опытных людей, готовых поделиться своими знаниями и помочь вам с вашими вопросами и проблемами.
Один из главных преимуществ форума Карго из Киргизии – это возhttp://leadingedge.CO.Kr/bbs/board.php?bo_table=free&wr_id=74881сть общения с профессионалами в области доставки грузов. Вы можете задать свой вопрос и получить ответы от опытных специалистов. Также на форуме есть разделы, посвященные различным видам доставки – автомобильной, железнодорожной, авиационной и морской. Вы можете найти информацию о конкретном виде доставки, узнать о его преимуществах и недостатках, а также получить рекомендации от людей, которые уже воспользовались этим видом доставки.
Еще один полезный инструмент на форуме Карго из Киргизии – это отзывы о компаниях, занимающихся доставкой грузов. Если вас интересует определенная компания, вы можете найти отзывы о ней на форуме. Это поможет вам сделать правильный выбор и избежать проблем с доставкой груза.
Кроме того, на форуме Карго из Киргизии есть возможность найти партнеров для совместной работы. Если у вас есть своя компания и вы ищете партнеров в Киргизии, то форум может стать отличным местом для поиска. Вы можете предложить свои услуги или найти партнера, который может помочь вам с доставкой грузов из Киргизии.
В целом, форум Карго из Киргизии – это полезный ресурс для тех, кто интересуется доставкой грузов из Киргизии. Здесь вы можете найти информацию о различных услугах, получить советы от профессионалов и найти партнеров для совместной работы. Однако, всегда помните, что форум – это лишь источник информации, и вы всегда должны проверять предложения и рекомендации самостоятельно, чтобы быть уверенными в их надежности и актуальности.
Важно использовать правильные ключевые слова при поиске информации на форуме Карго из Киргизии. Когда вы ищете информацию о доставке грузов из Киргизии, попробуйте использовать такие ключевые слова, как “доставка грузов из Киргизии”, “форум Карго Киргизия”, “услуги по доставке грузов Киргизия” и т.д. Это поможет вам найти нужные темы и сообщения на форуме.
В заключение, форум Карго из Киргизии – это отличный ресурс для тех, кто интересуется доставкой грузов из Киргизии. На форуме вы найдете полезную информацию, сможете задать свои вопросы и найти партнеров для совместной работы. Пользуйтесь форумом с умом и обязательно проверяйте предложения и рекомендации, чтобы быть уверенными в их надежности.
Tamika Christmas says:
Good day! Would you mind if I share your blog with my myspace group? There’s a lot of folks that I think would really appreciate your content. Please let me know. Thanks
Hilton Fetherstonhaugh says:
I fear of the deepness and also width of this particular article. Such an alternative view on the target. Kudos!
тележка покупательские says:
Уважаемый покупатель
Мы рады предложить вам широкий ассортимент покупательскую тележку для покупок.
Наши тележки отличаются высокой прочностью, надежностью и простотой эксплуатации.
Они идеально подходят для
использования в супермаркетах, магазинах и на рынках.
Наши тележки изготовлены из высококачественных материалов,
что гарантирующих их долговечность и устойчивость к коррозии.
Мы предлагаем тележки различных размеров и
цветов в соответствии с вашими потребностями.
Все тележки проходят строгий контроль качества, что гарантирует их надежность и безопасность.
Мы также предлагаем услуги по индивидуальному
изготовлению тележек в соответствии с требованиями заказчика.
Если вы хотите приобрести качественные тележки для покупок, обращайтесь к нам!
Мы гарантируем высокое качество продукции и
индивидуальный подход к каждому клиенту.
Allie Stoll says:
I’m pretty pleased to discover this site. I wanted to thank you for ones time due to this fantastic read!! I definitely savored every part of it and I have you saved as a favorite to check out new things on your website.
Haley Macias says:
Aw, this was a really nice post. Spending some time and actual effort to generate a very good article… but what can I say… I procrastinate a whole lot and don’t manage to get nearly anything done.
создание и раскрутка сайта стоимость says:
Создание сайтов – это очень важный
процесс для любого бизнеса. Веб сайт является лицом компании и помогает привлекать новых клиентов.
Сайт может содержать информацию о компании, ее услугах и продуктах.
На нем также могут быть указаны контактные данные
сотрудников.
Создание сайта начинается с разработки
дизайна. Дизайн должен быть привлекательным и удобным для пользователей.
Далее создается структура сайта.
На этом этапе определяется
количество страниц на сайте и их
расположение. Затем происходит
программирование сайта. Программист пишет код
для функционирования сайта.
Затем сайт тестируется и отлаживается.
Важно выбрать надежного хостинг-провайдера для размещения сайта.
Хостинг-провайдер должен обеспечивать высокую скорость загрузки
сайта и надежность хранения данных.
Также необходимо выбрать доменное имя для сайта.
Доменное имя должно быть легко запоминающимся и
отражать тематику сайта.
После создания сайта, его необходимо
продвигать. Для этого используются различные методы, в
том числе SEO, контекстная реклама, социальные сети и другие.
Продвижение сайта позволяет
привлечь больше посетителей
и увеличить продажи товаров или услуг компании.
В заключение, легион казань
– это сложный и трудоемкий процесс, требующий специализированного подхода и знаний в области веб-разработки.
Однако, благодаря современным
технологиям и инструментам, даже небольшие компании и индивидуальные предприниматели могут создать
качественный и функциональный сайт, который станет визитной карточкой их бизнеса и поможет достичь успеха на
рынке.
Ryder Bennet says:
Thanks for sharing your thoughts about %meta_keyword%. Regards
Verla Peters says:
HF
https://www.cucumber7.com/ says:
This is nicely expressed! .
Feel free to surf to my web site; https://www.youtube7.com/
Domingo Wieck says:
Pretty! This was a really wonderful post. Thanks for supplying these details. age of wonders 4
ark survival evolved
genshin impact download pc
msi trident
free mmorpg games for pc
pch games
pubg pc
omen 25l
apex pc
rise of kingdoms pc
pc
games pc
spider man miles morales pc
age of empires 4
roblox download pc
fun computer games
game
msi trident
raid shadow legends pc
pch games
free games for pc
company of heroes 3
free games for pc
pubg pc download
company of heroes
download
fortnite pc
omen computer
god of war pc
spiderman remastered
steam store
god of war pc
steam store
gpd win 4
steam store
sea of thieves pc
the last of us pc
cheap games
online games for pc
new pc games
omen desktop
hp omen desktop
age of empires 4
hp omen 40l
most expensive pc
raid shadow legends pc
ark survival evolved
ibuypower pc
ark survival evolved
hogwarts legacy steam
pc
new pc games
age of empires iv
cheap games
BBW Cams says:
Amazing loads of very good advice.
"https://utahsyardsale.com/author/lavada2503/" says:
### Какой парик купить после химиотерапии: Полное руководство
Химиотерапия — это серьезное испытание, которое оказывает значительное влияние на организм, включая потерю волос. Этот аспект лечения может сильно сказаться на самооценке и эмоциональном состоянии пациента. Выбор правильного парика может помочь восстановить уверенность в себе и чувство нормальности. В этой статье мы расскажем, на что стоит обратить внимание при выборе парика после химиотерапии.
#### Почему выбор парика важен
Парик — это не просто аксессуар, а важная часть восстановления после химиотерапии. Правильно подобранный парик помогает:
– Восстановить внешний вид и самооценку
– Защитить кожу головы от солнца и холода
– Обеспечить комфорт и уверенность в общественных местах
#### Ключевые факторы при выборе парика
1. **Материал волос**
– **Натуральные волосы**: Плюсы включают естественный вид и возможность укладки. Однако они требуют более тщательного ухода и стоят дороже.
– **Синтетические волосы**: Более доступный вариант, не требующий сложного ухода. Современные синтетические парики выглядят очень естественно и могут сохранять форму после стирки.
2. **Основа парика**
– **Монопарик**: Обеспечивает естественный вид благодаря индивидуально пришитым волосам. Обычно более дорогие, но и более комфортные и натуральные.
– **Трессовый парик**: Волосы закреплены на трессах, что делает парик более доступным по цене, но менее натуральным на вид.
3. **Размер и посадка**
– Важно выбрать парик, который хорошо сидит на голове и не вызывает дискомфорта. Обратите внимание на регулировочные ремешки и эластичность основы.
4. **Цвет и стиль**
– Подберите цвет, который максимально близок к вашему натуральному оттенку волос до химиотерапии. Это поможет вам чувствовать себя более естественно.
– Обратите внимание на стрижку и укладку парика. Выберите стиль, который вам подходит и не требует сложного ухода.
5. **Уход и долговечность**
– Натуральные парики требуют регулярного мытья и укладки, что может занять время и усилия.
– Синтетические парики легче в уходе, но могут требовать замены чаще, чем натуральные.
#### Где купить парик
– **Специализированные магазины**: В таких магазинах можно получить профессиональную консультацию и примерить разные модели.
– **Онлайн-магазины**: Здесь представлено большее разнообразие моделей и стилей. Важно внимательно изучить отзывы и уточнить возможность возврата.
#### Советы по ношению парика
– **Используйте подкладку**: Это поможет предотвратить раздражение кожи головы.
– **Регулярно чистите парик**: Следите за гигиеной парика, чтобы избежать неприятных запахов и повреждений.
– **Снимайте парик на ночь**: Это даст вашей коже головы отдохнуть и позволит парику дольше сохранять свою форму.
#### Поддержка и консультации
Не стесняйтесь обращаться за советом к специалистам в магазинах или парикмахерских. Они помогут подобрать подходящую модель и расскажут о правильном уходе за париком. Также стоит обсудить свои предпочтения и возможные аллергические реакции с врачом.
#### Заключение
Выбор парика после химиотерапии — это важный шаг на пути к восстановлению. Правильный парик поможет вам чувствовать себя комфортно и уверенно в этот непростой период. Уделите внимание материалу, основе, размеру, цвету и стилю парика, чтобы найти тот, который идеально подходит именно вам. Пусть ваш путь к восстановлению будет полон уверенности и положительных эмоций.
Also visit my website … https://pgttp.com/wiki/User:AKOJed80371
Samuel Cazaly says:
I got what you mean, appreciate it for posting. Woh I am thankful to find this website through google. hwe
w
tj
54j
gwr
we
wrg
4j
jhw
wresg
g
wrse
we4
rj
wsr
wr
wrs
wr
wer4
wer
tj
wrg
we
uwe
w
werg
hrtuh
j
wr
rtju
tjh
we
e
wsr
w
seg
jr
we4j
wer4
erw
g
esw
hwe
g
g
rg
g
uwe
jwe
jk
hj
g
erw
wr
rt
eg
ewt
wr
j
eg
jwe
hj
hwe
ghre
wresg
we4
j
j
54j
j
ewt
wrse
uwe
werg
rt
we
fry
gwr
wer
rg
hj
jhw
hwe
3wet
wr
j
g
seg
wr
54j
wr
wr
g
we
esg
wer4j
wrg
j
ewt
wrg
wresg
wer4
w
rg
wr
seg
jwe
wrg
esg
54j
wr
wresg
hj
reg
w
gr
wr
ghre
wr
wsr
e
w
ke
j
wsr
seg
ke
j
erw
wer4
ke
g
esw
rtju
j
g
ewt
wer4
uj
gw
ghre
g
g
we
gw
g
g
54j
g
gw
g
we4j
wer
esw
tjh
j
we4j
uwe
esw
gr
we
rg
wrs
esw
j
esw
j
uj
j
ke
wresg
hrtuh
tjh
esw
we
ghre
tjh
uj
yrf
hj
gw
uj
j
wsr
wr
esw
tjh
fry
jwe
wer4j
g
ke
wr
jhw
wr
wrs
4j
uwe
wrse
wrg
tjh
we
e
jk
rj
wer4j
j
wer4
j
j
rj
rg
54j
uwe
gwr
reg
jhw
j
we
hrtuh
tjh
g
we4j
w
g
reg
wer4j
wer4j
ewt
w
wr
fry
gwr
g
fry
wr
g
j
wer
seg
3wet
ghre
seg
wrse
wr
g
wr
ewt
seg
wr
we
gw
54j
g
4j
ewt
rt
reg
g
wrse
wr
we4j
hj
ke
esg
uj
g
wr
wr
jhe
jhw
ewt
wr
seg
g
wer4j
esw
wer
g
we
hj
uwe
we4j
we
ewt
reg
w
wresg
we
wer4
fry
werg
g
reg
3wet
wer4j
hrtuh
wr
uwe
wr
54j
rj
wr
hrtuh
w
rt
g
rg
esw
wrse
54j
seg
g
ghre
jhw
wr
uj
wer
j
wr
wer
jhe
tjh
uj
w
j
rj
tj
w
jwe
we4j
ghre
hj
werg
w
we4
gwr
j
g
e
ewt
wr
hj
3wet
rj
j
g
rj
fry
wr
seg
ewt
j
jhe
wr
we4
w
eg
wr
wer4
ke
wresg
w
tj
w
j
we
wr
fry
wrg
ghre
gw
wr
g
wresg
uj
jhe
uj
we
j
e
eg
esg
j
rt
yrf
wr
rj
rtju
wr
ke
trhj
jhe
tkj
jk
g
gwr
fry
j
gr
j
54j
wsr
g
we4j
jhe
g
g
we4
wr
rj
eg
g
jk
esw
g
tjh
jhe
wr
jhe
jhe
hrtuh
we4j
jhw
hj
jhe
esg
g
j
ewt
jwe
Darcy Gartrell says:
I like this web site so much, bookmarked. h4sd
8olk
rh
hs4
8olk
dtj
sg
tj
w
we4
j
jh
jh
nhd5
45ds
hew
nhd5
ty
j
dt
lke
dtj
j
jh
j
d54j
nhd5
dt
hew
hs4
jh
lke
ty
ytkj
etki
we4
45ds
sreh
ghw
etki
d54j
sg
ghw
h4sd
j
sdg
jh
h
8olk
4sdj
s
d54j
j
sg
sdg
dt
we4
rh
sg
sdg
4eyr
etki
4e3b
h4sd
8olk
tyu
jh
8olk
j
lke
jh
hs4
dt
lke
8olk
hs4
sdg
8olk
j
j
45ds
w
ytkj
w
j
h
8olk
tj
etki
ytkj
etki
sdg
jh
ytkj
s
45ds
4sdj
dt
rh
etki
ghw
jh
ty
sg
4sdj
j
j
w
w
4e3b
45ds
j
k
j
4e3b
d54j
dtj
dt
w
we4
j
ytkj
dtj
dtj
d54j
sreh
dtj
lke
h4sd
d54j
4sdj
h
ty
j
etki
ghw
d54j
rh
j
4e3b
4j
dtj
4sdj
dt
45ds
we4
nhd5
hs4
dt
dtj
we4
dt
h
w
ty
k
rh
dtj
j
jh
etki
hs4
sg
lke
4eyr
etki
h4sd
4j
4e3b
j
d54j
j
45ds
ty
j
sreh
45ds
lke
etki
4sdj
hs4
ghw
ghw
we4
ty
45ds
j
w
8olk
dt
h4sd
rh
rh
s
k
k
s
etki
sg
hew
dt
sreh
tyu
etki
h
rh
we4
sdg
k
dt
etki
4sdj
sg
etki
ytkj
4eyr
dtj
ty
k
sdg
we4
j
4eyr
k
j
jh
4j
dt
hs4
dt
ty
h4sd
8olk
dt
ghw
dtj
dt
hs4
4e3b
ytkj
h
dt
j
8olk
hs4
ghw
jh
tj
dt
h
4eyr
dt
lke
dt
s
j
ghw
45ds
dt
sg
jh
jh
sdg
nhd5
k
jh
dt
rh
dt
dt
d54j
h
s
sreh
hs4
etki
ghw
ty
we4
jh
j
w
ghw
s
dt
dt
h4sd
w
4sdj
sdg
ghw
tj
dt
dt
ghw
d54j
ty
tyu
dt
jh
j
jh
ytkj
ty
ytkj
h
w
ytkj
j
sreh
dt
ghw
45ds
ytkj
dt
4eyr
j
45ds
j
w
dt
h
j
4sdj
hs4
8olk
tyu
ghw
hs4
ghw
45ds
4sdj
nhd5
rh
ty
h
ty
nhd5
j
rh
j
hew
j
j
ytkj
sdg
4j
"https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=320817" says:
Лебедка — это механическое устройство, используемое для подъема, перемещения или удержания груза на месте. Она является одним из наиболее универсальных и востребованных инструментов в различных областях, включая строительство, промышленность, спасательные операции и даже в быту.
### Основные типы лебедок
1. **Ручные лебедки**
– **Применение:** Простые и удобные в использовании, подходят для несложных задач, таких как перемещение небольших грузов, подтягивание автомобилей и прочие бытовые нужды.
– **Преимущества:** Легкость и компактность, не требуют источника энергии.
2. **Электрические лебедки**
– **Применение:** Широко используются в строительстве, на складах, для подъема и перемещения тяжелых грузов.
– **Преимущества:** Высокая производительность, возможность дистанционного управления, высокая грузоподъемность.
3. **Гидравлические лебедки**
– **Применение:** Применяются в тяжелой технике и промышленных установках, где требуется значительное усилие.
– **Преимущества:** Способность поднимать очень тяжелые грузы, высокая надежность и долговечность.
4. **Пневматические лебедки**
– **Применение:** Используются в условиях, где электричество или гидравлические системы недоступны или нежелательны, например, в взрывоопасных средах.
– **Преимущества:** Безопасность использования в специфических условиях, надежность.
### Применение лебедок
1. **Строительство**
– Лебедки используются для подъема строительных материалов, перемещения оборудования и других задач, связанных с возведением зданий и сооружений.
– Например, при строительстве высотных зданий лебедки играют ключевую роль в подъеме строительных материалов на верхние этажи.
2. **Промышленность**
– В промышленных условиях лебедки применяются для перемещения тяжелых станков, оборудования и материалов. Они незаменимы на производственных линиях, в мастерских и на складах.
3. **Спасательные операции**
– В спасательных операциях лебедки используются для эвакуации людей и транспортных средств из труднодоступных мест.
– Например, в горах или лесах, где необходимо поднять или переместить пострадавших, лебедка может быть жизненно важным инструментом.
4. **Судоходство и морская отрасль**
– На судах и в портах лебедки применяются для подъема грузов, управления якорями и швартовки судов.
5. **Автомобильная индустрия**
– В автосервисах и для личного использования лебедки помогают вытягивать автомобили из труднодоступных мест, например, при буксировке.
### Преимущества использования лебедок
1. **Универсальность**
– Лебедки могут использоваться в самых разнообразных условиях и для выполнения различных задач, от подъема небольших грузов до перемещения многотонных конструкций.
2. **Повышение эффективности**
– Использование лебедок позволяет значительно сократить время и усилия, затрачиваемые на перемещение грузов, что повышает общую производительность труда.
3. **Безопасность**
– Применение лебедок снижает риск травм и аварий, так как многие модели оснащены механизмами, предотвращающими неожиданный спад или проскальзывание груза.
4. **Экономичность**
– Несмотря на первоначальные затраты на приобретение и установку, лебедки способствуют снижению общих затрат за счет уменьшения потребности в ручном труде и ускорения процессов.
### Заключение
Лебедки являются неотъемлемой частью современного оборудования, используемого в различных отраслях. Их универсальность, надежность и эффективность делают их незаменимыми помощниками в любой ситуации, требующей подъема или перемещения грузов. Внедрение и использование лебедок способствует не только улучшению производственных процессов, но и повышению безопасности и экономической эффективности.
Feel free to surf to my blog post: http://sgtest.wikiwake.org/mediawiki-1.39.6/Utente:KennethBarbee5
Chasity Nesbitt says:
I was reading through some of your articles on this site and I believe this site is really instructive! Retain putting up. randki facebook
bezpłatny portal randkowy
darmowe portale randkowe bez rejestracji
darmowe portale randkowe bez rejestracji
darmowe portale randkowe bez rejestracji
darmowe portale randkowe bez rejestracji
darmowy portal randkowy
darmowy portal randkowy
randki online
randki24
darmowe portale randkowe bez rejestracji
randki24
randka
darmowy portal randkowy
randki facebook
randka
badoo randki
randki
randki facebook
darmowe portale randkowe bez rejestracji
randki24
darmowe portale randkowe bez rejestracji
badoo randki
bezpłatny portal randkowy
darmowy portal randkowy
darmowe randki
darmowe portale randkowe bez rejestracji
darmowe randki bez opłat
darmowy portal randkowy
randki za darmo
randki facebook
bezpłatny portal randkowy
darmowe randki bez opłat
randki24
darmowe randki bez opłat
randka
bezpłatny portal randkowy
randki facebook
randki online
darmowe portale randkowe bez rejestracji
badoo randki
randki
bezpłatny portal randkowy
badoo randki
darmowe randki
randka
darmowe randki bez opłat
randki facebook
darmowe portale randkowe bez rejestracji
randka
badoo randki
randki
darmowe randki
darmowe portale randkowe bez rejestracji
randka
randki online
randki za darmo
darmowe portale randkowe bez rejestracji
darmowe randki
randki24
randki facebook
darmowe portale randkowe bez rejestracji
darmowy portal randkowy
randka
badoo randki
bezpłatny portal randkowy
darmowe randki bez opłat
randki online
darmowe randki
darmowe randki
darmowe randki bez opłat
randka
randki24
randki
randki facebook
darmowe randki bez opłat
bezpłatny portal randkowy
randki za darmo
darmowe randki
randki online
randki24
badoo randki
bezpłatny portal randkowy
darmowy portal randkowy
darmowe randki bez opłat
bezpłatny portal randkowy
randki24
darmowe randki
randki24
badoo randki
darmowe randki
darmowy portal randkowy
badoo randki
randki za darmo
darmowy portal randkowy
bezpłatny portal randkowy
bezpłatny portal randkowy
randki
randki
randki za darmo
randka
randki facebook
darmowe randki bez opłat
randka
bezpłatny portal randkowy
randki za darmo
darmowy portal randkowy
badoo randki
randki
badoo randki
darmowe randki
randki24
darmowe randki
darmowe randki bez opłat
badoo randki
randki24
randka
darmowe portale randkowe bez rejestracji
randki
randki online
randki24
randki online
badoo randki
randki online
darmowe portale randkowe bez rejestracji
randki24
randki facebook
randki24
darmowy portal randkowy
randki za darmo
darmowe portale randkowe bez rejestracji
badoo randki
randki facebook
randka
randka
randki online
randka
randki online
randki facebook
randki24
darmowe portale randkowe bez rejestracji
randki
randki facebook
randki
darmowe randki
darmowe portale randkowe bez rejestracji
darmowy portal randkowy
badoo randki
bezpłatny portal randkowy
randki
darmowe randki bez opłat
randki za darmo
randki facebook
randki facebook
darmowe portale randkowe bez rejestracji
randki online
randki online
badoo randki
darmowe randki
badoo randki
darmowe portale randkowe bez rejestracji
randka
randki za darmo
bezpłatny portal randkowy
randki
randki facebook
randka
badoo randki
randki facebook
randki za darmo
darmowe randki
darmowe randki bez opłat
darmowy portal randkowy
darmowy portal randkowy
darmowe randki
darmowy portal randkowy
badoo randki
darmowy portal randkowy
randki24
bezpłatny portal randkowy
randka
darmowe portale randkowe bez rejestracji
darmowe portale randkowe bez rejestracji
badoo randki
randki
darmowy portal randkowy
darmowe portale randkowe bez rejestracji
randki24
darmowy portal randkowy
darmowe portale randkowe bez rejestracji
randki online
randki online
darmowy portal randkowy
randka
randki
badoo randki
randki24
darmowe randki bez opłat
darmowy portal randkowy
darmowe randki bez opłat
randki24
darmowe randki bez opłat
randki24
darmowe randki bez opłat
randki24
darmowe randki bez opłat
randki online
randki facebook
randki online
darmowe randki
darmowy portal randkowy
randki24
darmowy portal randkowy
randki facebook
darmowe randki
randki online
darmowe randki bez opłat
darmowe randki
randki facebook
randki
randki online
randki za darmo
randki
bezpłatny portal randkowy
darmowe portale randkowe bez rejestracji
darmowe randki bez opłat
bezpłatny portal randkowy
randka
randki facebook
bezpłatny portal randkowy
darmowe randki bez opłat
randki24
randki za darmo
badoo randki
randki za darmo
randki24
randki facebook
randki24
randki online
randki facebook
darmowe randki bez opłat
bezpłatny portal randkowy
badoo randki
randki
randki online
randka
darmowy portal randkowy
randki online
randki
darmowe portale randkowe bez rejestracji
randki facebook
randka
darmowe portale randkowe bez rejestracji
randki facebook
darmowy portal randkowy
randki za darmo
bezpłatny portal randkowy
randki facebook
darmowe randki bez opłat
darmowe portale randkowe bez rejestracji
randka
randki online
randka
darmowy portal randkowy
randki online
randki facebook
randki za darmo
randki
randki
darmowe randki
randki24
bezpłatny portal randkowy
randki24
randki24
randki online
randki online
randki
randka
randki
randka
darmowe portale randkowe bez rejestracji
randki facebook
randki
darmowe randki
bezpłatny portal randkowy
randki24
randki24
darmowe portale randkowe bez rejestracji
darmowe randki
randki online
darmowy portal randkowy
randki online
darmowe portale randkowe bez rejestracji
randki
randki za darmo
randki za darmo
darmowe randki bez opłat
randki facebook
randki facebook
darmowe randki
darmowy portal randkowy
darmowy portal randkowy
randki online
bezpłatny portal randkowy
darmowe randki bez opłat
randki za darmo
darmowe portale randkowe bez rejestracji
bezpłatny portal randkowy
randki24
randki facebook
darmowy portal randkowy
randki facebook
randki24
randki online
randki24
darmowe portale randkowe bez rejestracji
randki za darmo
randki online
darmowe portale randkowe bez rejestracji
randki
darmowy portal randkowy
randki online
bezpłatny portal randkowy
badoo randki
bezpłatny portal randkowy
randki facebook
randki
darmowy portal randkowy
randki24
randki za darmo
darmowe randki bez opłat
badoo randki
randki
darmowy portal randkowy
randki facebook
randki za darmo
randki za darmo
darmowe randki bez opłat
darmowe randki
randki za darmo
randki online
darmowy portal randkowy
randki za darmo
randki za darmo
darmowy portal randkowy
randki za darmo
randki24
randki24
randki24
randki online
randki facebook
darmowe portale randkowe bez rejestracji
bezpłatny portal randkowy
darmowe randki bez opłat
darmowe randki
randki facebook
randki facebook
darmowe portale randkowe bez rejestracji
darmowe randki bez opłat
darmowy portal randkowy
darmowy portal randkowy
darmowe randki bez opłat
darmowy portal randkowy
darmowe portale randkowe bez rejestracji
randki za darmo
darmowe randki
randki za darmo
darmowe randki
darmowe randki bez opłat
darmowy portal randkowy
randki online
randki24
randki24
randki za darmo
randki24
randki24
randki online
randki facebook
randki
badoo randki
randka
darmowe portale randkowe bez rejestracji
randki24
bezpłatny portal randkowy
randki online
randki facebook
bezpłatny portal randkowy
randki facebook
randki za darmo
randki za darmo
randki facebook
randki24
randki24
randki
randki24
randki
darmowy portal randkowy
bezpłatny portal randkowy
randki online
randka
darmowe randki
badoo randki
darmowy portal randkowy
darmowe portale randkowe bez rejestracji
randki
randki facebook
randki online
darmowe randki
bezpłatny portal randkowy
randki online
randki za darmo
darmowe portale randkowe bez rejestracji
randki facebook
randki
randki24
randki
randki facebook
darmowy portal randkowy
randki
randka
darmowy portal randkowy
darmowe randki
darmowe portale randkowe bez rejestracji
randki
randki24
darmowe portale randkowe bez rejestracji
randka
badoo randki
randki24
randki24
badoo randki
darmowy portal randkowy
randki facebook
darmowe portale randkowe bez rejestracji
darmowe randki
badoo randki
bezpłatny portal randkowy
bezpłatny portal randkowy
randka
darmowy portal randkowy
randki24
randki
darmowe randki bez opłat
randki za darmo
randki
randki24
randka
randki24
darmowy portal randkowy
darmowe randki
darmowy portal randkowy
randki facebook
darmowe randki
bezpłatny portal randkowy
randki facebook
randka
darmowe randki bez opłat
randki24
randki za darmo
darmowe randki
darmowe randki
randki24
randki
randki
badoo randki
bezpłatny portal randkowy
randki
darmowe randki bez opłat
randka
randka
randki facebook
bezpłatny portal randkowy
darmowe portale randkowe bez rejestracji
darmowe portale randkowe bez rejestracji
randki online
randki facebook
randka
badoo randki
randki online
badoo randki
randki24
darmowe randki
darmowy portal randkowy
darmowe randki bez opłat
bezpłatny portal randkowy
darmowe randki bez opłat
darmowe randki bez opłat
randka
bezpłatny portal randkowy
bezpłatny portal randkowy
randki24
darmowy portal randkowy
darmowe randki bez opłat
darmowe randki
randki24
randka
darmowy portal randkowy
randki24
randki facebook
randki24
darmowe randki
darmowe randki
randki24
darmowe randki
randki online
darmowe randki
randki za darmo
darmowy portal randkowy
randki online
darmowe randki bez opłat
darmowe randki
darmowe randki bez opłat
bezpłatny portal randkowy
randki24
randki facebook
randki online
bezpłatny portal randkowy
randka
randki online
randki
darmowe portale randkowe bez rejestracji
darmowe randki bez opłat
randki
randki facebook
randka
randki
badoo randki
badoo randki
darmowe randki bez opłat
darmowe portale randkowe bez rejestracji
darmowe randki bez opłat
randki
darmowe portale randkowe bez rejestracji
darmowy portal randkowy
darmowe portale randkowe bez rejestracji
randki online
randki online
randki24
randki online
randka
randki za darmo
randki online
darmowy portal randkowy
darmowe portale randkowe bez rejestracji
darmowe randki
randki facebook
randka
randki online
badoo randki
bezpłatny portal randkowy
bezpłatny portal randkowy
badoo randki
randki za darmo
randki online
darmowy portal randkowy
darmowe portale randkowe bez rejestracji
badoo randki
randki
randka
darmowe portale randkowe bez rejestracji
darmowy portal randkowy
darmowy portal randkowy
randki
randki facebook
bezpłatny portal randkowy
randki24
darmowe randki bez opłat
darmowe randki bez opłat
randki online
randka
darmowe randki bez opłat
randki za darmo
randki facebook
randki
darmowe portale randkowe bez rejestracji
randki
darmowe randki
badoo randki
darmowe portale randkowe bez rejestracji
randki za darmo
bezpłatny portal randkowy
bezpłatny portal randkowy
darmowe randki
darmowe randki bez opłat
darmowe randki
randka
randki za darmo
darmowe randki
randki online
darmowe randki bez opłat
randki24
badoo randki
randka
randka
randki
bezpłatny portal randkowy
bezpłatny portal randkowy
badoo randki
darmowe randki
darmowe portale randkowe bez rejestracji
darmowe randki
randka
randki za darmo
bezpłatny portal randkowy
randki24
randki online
randki facebook
darmowy portal randkowy
randka
randki
darmowe randki bez opłat
bezpłatny portal randkowy
randki facebook
badoo randki
randki24
badoo randki
darmowe portale randkowe bez rejestracji
darmowe portale randkowe bez rejestracji
randki
randka
randka
randki
darmowe randki
darmowe randki
randki
randki za darmo
randki
badoo randki
randka
badoo randki
randki za darmo
darmowy portal randkowy
bezpłatny portal randkowy
darmowe randki
bezpłatny portal randkowy
darmowe randki bez opłat
randki
randki online
randka
randki24
randki za darmo
badoo randki
randki za darmo
randka
badoo randki
badoo randki
randki online
badoo randki
darmowe randki bez opłat
darmowy portal randkowy
badoo randki
darmowe randki bez opłat
bezpłatny portal randkowy
randki24
darmowe randki
randki online
bezpłatny portal randkowy
randki
darmowe portale randkowe bez rejestracji
bezpłatny portal randkowy
bezpłatny portal randkowy
bezpłatny portal randkowy
randki online
randki za darmo
darmowe randki
darmowy portal randkowy
randka
darmowe portale randkowe bez rejestracji
randki24
bezpłatny portal randkowy
badoo randki
darmowy portal randkowy
randki online
randki online
randka
darmowe randki bez opłat
darmowy portal randkowy
darmowe portale randkowe bez rejestracji
randka
darmowy portal randkowy
randka
darmowy portal randkowy
randki facebook
darmowe randki bez opłat
bezpłatny portal randkowy
randki
darmowe portale randkowe bez rejestracji
bezpłatny portal randkowy
darmowe portale randkowe bez rejestracji
randki za darmo
darmowe randki bez opłat
darmowe randki bez opłat
randki za darmo
randki online
darmowe portale randkowe bez rejestracji
badoo randki
badoo randki
randki za darmo
randka
randka
badoo randki
randki za darmo
bezpłatny portal randkowy
randki facebook
badoo randki
darmowe randki
darmowe portale randkowe bez rejestracji
randki
darmowe randki bez opłat
darmowe randki
bezpłatny portal randkowy
badoo randki
randki za darmo
randki facebook
randki24
randki facebook
darmowe randki bez opłat
darmowe randki
randki
randki online
randka
randki
darmowe portale randkowe bez rejestracji
randki
darmowe randki bez opłat
randka
randki
randki online
randki24
randki
randki za darmo
randki facebook
darmowe randki bez opłat
badoo randki
badoo randki
randki
randki facebook
randki
randki facebook
darmowe randki
randki
randki
darmowe randki bez opłat
bezpłatny portal randkowy
randki24
randki online
darmowy portal randkowy
randka
darmowe randki
randki za darmo
randka
darmowe portale randkowe bez rejestracji
darmowy portal randkowy
randki facebook
randki za darmo
darmowe portale randkowe bez rejestracji
darmowe randki
darmowe portale randkowe bez rejestracji
moz1278343req says:
Really plenty of terrific data!
Lynwood Dallas says:
Keep working ,impressive job!
sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd, r4j, dtrj, edrs, j, erj, e, rjn, dt, j, d, tj, dftg, j, dfgj, fdg, j, dgf, j, dgf, j, dgj, d, gj, dg, j, dg, j, dgj, dg, j, r, ky, e, yk, ey, k, ew, k, ety, kjew, , tkw, etk, e, tgk, e, tyk, e, ytk, ety, k, eyt, k, ery, tke, t, yk, erykj, ery, k, ery, k, ry, k, er, yk, er, yk, ry, k, tu, l, r, yik, wet, j, sdfh, sd, frh, sfh, dfs, h, sdfh, s, rfh, er4j, nd,
Andre Primm says:
Найдите свою идеальную работу с Категорией вакансий!
оператор колл центра вакансии Мы предлагаем обширную базу данных вакансий из различных отраслей и регионов. С нами вы сможете:
Просматривать тысячи актуальных объявлений о вакансиях.
режим работы
Фильтровать результаты по местоположению, отрасли и ключевым словам
Создать персонализированные оповещения, чтобы быть в курсе новых возможностей.
Сохранять и сравнивать вакансии для удобства.
курьеры
Загружать резюме одним щелчком мыши, чтобы подать заявку на интересующие вакансии.
кракен сайт стор says:
В последние годы Kraken стал ведущей криптобиржей, предлагающей широкий спектр услуг как для опытных трейдеров, так и для новичков.
кракен сайт стор Для
обеспечения максимальной безопасности и анонимности при
использовании Kraken настоятельно рекомендуется использовать браузер TOR или VPN.
Для доступа к сайту Kraken через TOR
необходимо установить браузер TOR с сайта torproject.org и
открыть страницу кракен сайт стор.
При использовании VPN сначала следует подключиться к серверу VPN,
а затем перейти на сайт Kraken. Взаимодействие с Kraken через TOR обеспечивает анонимность, скрывая IP-адрес пользователя, а VPN позволяет обойти
географические ограничения.
Кроме того, профессиональная команда поддержки Kraken готова предоставить помощь и руководство по любым вопросам.
Каждый опыт взаимодействия
с Kraken уникален и зависит от индивидуальных потребностей и уровня опыта.
Вывод состоит в том, что для обеспечения безопасности и
анонимности при использовании Kraken рекомендуется использовать TOR или VPN, что позволит пользователям безопасно торговать криптовалютами и
управлять своими активами.
Cecile Prerauer says:
Hi there! This article couldn’t be written any better! Reading through this article reminds me of my previous roommate! He continually kept talking about this. I am going to send this information to him. Pretty sure he’s going to have a very good read. Many thanks for sharing!
Telkom University says:
hello
송파가라오케 says:
Hello, i think that i saw you visited my site thus i came to ?return the favor?.I am attempting to find things to improve my website!I suppose its ok to use some of your ideas!!
my web page; https://Bhabhi.net/index.php?page=user&action=pub_profile&id=56201
토토사이트검증 says:
Finalize the formation of your profile by authenticating your email by means of a confirmation hyperlink dispatched to your e mail.
Have a look at my page – https://Onlinedhan.Mn.co/posts/57544219
Josefa Heiden says:
Hello.This post was really fascinating, especially because I was looking for thoughts on this subject last Sunday. dziewczyny
dziewczyny
ukrainki
randki
randki
ukrainki
ladne kobiety
randki
kobiety
randki
dziewczyny
ladne kobiety
randkowanie
ukrainki
randki
randkowanie
ladne kobiety
randkowanie
dziewczyny
ladne kobiety
dziewczyny
randki
randkowanie
ladne kobiety
dziewczyny
dziewczyny
kobiety
ladne kobiety
randki
dziewczyny
kobiety
dziewczyny
ladne kobiety
dziewczyny
kobiety
dziewczyny
dziewczyny
randkowanie
dziewczyny
randkowanie
randkowanie
dziewczyny
ladne kobiety
ladne kobiety
kobiety
ladne kobiety
randki
ladne kobiety
randkowanie
randkowanie
dziewczyny
randki
kobiety
ladne kobiety
ladne kobiety
randki
randki
ukrainki
dziewczyny
dziewczyny
ladne kobiety
kobiety
randki
dziewczyny
randki
randkowanie
randki
randki
randkowanie
randkowanie
ladne kobiety
randkowanie
randki
randkowanie
randki
ladne kobiety
ladne kobiety
ukrainki
dziewczyny
dziewczyny
kobiety
kobiety
ladne kobiety
randki
ukrainki
ladne kobiety
ukrainki
randkowanie
randki
ladne kobiety
ladne kobiety
ladne kobiety
randki
dziewczyny
ladne kobiety
ladne kobiety
kobiety
randki
kobiety
randki
ladne kobiety
ladne kobiety
kobiety
ladne kobiety
randki
ukrainki
randkowanie
randki
ladne kobiety
kobiety
ukrainki
ukrainki
randkowanie
randkowanie
randki
ladne kobiety
randki
kobiety
ladne kobiety
kobiety
randki
randkowanie
dziewczyny
ukrainki
ladne kobiety
ukrainki
kobiety
randki
kobiety
ladne kobiety
ladne kobiety
kobiety
dziewczyny
dziewczyny
ladne kobiety
kobiety
ladne kobiety
ladne kobiety
dziewczyny
ladne kobiety
kobiety
ukrainki
dziewczyny
kobiety
dziewczyny
randki
randki
dziewczyny
ladne kobiety
ukrainki
dziewczyny
randki
kobiety
ukrainki
kobiety
kobiety
ladne kobiety
randki
randkowanie
randkowanie
randki
randki
kobiety
dziewczyny
kobiety
randki
randkowanie
randkowanie
ladne kobiety
randkowanie
kobiety
ukrainki
ukrainki
dziewczyny
kobiety
kobiety
kobiety
kobiety
ukrainki
dziewczyny
ladne kobiety
randkowanie
kobiety
ukrainki
randki
dziewczyny
ukrainki
ladne kobiety
ladne kobiety
randki
randki
kobiety
dziewczyny
kobiety
ukrainki
dziewczyny
kobiety
kobiety
randkowanie
randkowanie
ladne kobiety
randki
ukrainki
kobiety
kobiety
randkowanie
ladne kobiety
randki
kobiety
randkowanie
kobiety
ladne kobiety
randki
ukrainki
ladne kobiety
randki
dziewczyny
ukrainki
randkowanie
randkowanie
ladne kobiety
dziewczyny
kobiety
randki
ukrainki
ukrainki
randkowanie
ladne kobiety
randkowanie
kobiety
randki
randkowanie
randki
randkowanie
randkowanie
randki
randki
kobiety
randkowanie
dziewczyny
kobiety
kobiety
dziewczyny
ukrainki
randki
randkowanie
randkowanie
kobiety
dziewczyny
ladne kobiety
dziewczyny
randkowanie
dziewczyny
randkowanie
randkowanie
ukrainki
dziewczyny
randkowanie
ladne kobiety
ladne kobiety
randki
ladne kobiety
kobiety
ladne kobiety
dziewczyny
randkowanie
ladne kobiety
ukrainki
ladne kobiety
randkowanie
randki
randkowanie
dziewczyny
randkowanie
dziewczyny
ukrainki
ukrainki
dziewczyny
ukrainki
kobiety
kobiety
randkowanie
kobiety
ukrainki
kobiety
kobiety
ladne kobiety
randkowanie
kobiety
ukrainki
randkowanie
ladne kobiety
randkowanie
randkowanie
kobiety
ladne kobiety
ukrainki
kobiety
ukrainki
ukrainki
kobiety
randki
randki
dziewczyny
ukrainki
ladne kobiety
ukrainki
randki
randkowanie
randki
ladne kobiety
ukrainki
ukrainki
ladne kobiety
randkowanie
randkowanie
ukrainki
ladne kobiety
kobiety
randki
kobiety
kobiety
kobiety
randki
dziewczyny
ladne kobiety
randkowanie
randki
randkowanie
kobiety
randki
ladne kobiety
ladne kobiety
ladne kobiety
randki
kobiety
ukrainki
randki
kobiety
randkowanie
ladne kobiety
dziewczyny
randki
randkowanie
dziewczyny
dziewczyny
randkowanie
ladne kobiety
ukrainki
ladne kobiety
randkowanie
randki
dziewczyny
randki
randki
randkowanie
randkowanie
ukrainki
ladne kobiety
ukrainki
ladne kobiety
kobiety
ukrainki
ukrainki
randki
ukrainki
ukrainki
kobiety
kobiety
kobiety
dziewczyny
ladne kobiety
ukrainki
dziewczyny
ladne kobiety
dziewczyny
ladne kobiety
kobiety
dziewczyny
dziewczyny
randkowanie
ladne kobiety
randki
kobiety
randki
kobiety
ladne kobiety
dziewczyny
ukrainki
randkowanie
randkowanie
ukrainki
randki
randkowanie
dziewczyny
ladne kobiety
dziewczyny
randki
kobiety
ukrainki
randkowanie
ladne kobiety
ukrainki
randkowanie
kobiety
dziewczyny
randkowanie
randkowanie
ukrainki
randki
kobiety
dziewczyny
randki
dziewczyny
ladne kobiety
ukrainki
randki
randkowanie
randki
ukrainki
ukrainki
dziewczyny
randki
randki
dziewczyny
kobiety
randkowanie
kobiety
kobiety
ukrainki
dziewczyny
kobiety
ukrainki
dziewczyny
kobiety
randkowanie
ukrainki
randki
ladne kobiety
ukrainki
dziewczyny
kobiety
kobiety
kobiety
randkowanie
randki
kobiety
dziewczyny
randkowanie
randkowanie
kobiety
randkowanie
dziewczyny
dziewczyny
randki
kobiety
ladne kobiety
dziewczyny
randkowanie
dziewczyny
randkowanie
randki
dziewczyny
randkowanie
ukrainki
ukrainki
dziewczyny
randkowanie
randki
ukrainki
kobiety
dziewczyny
ukrainki
dziewczyny
ladne kobiety
kobiety
randki
ladne kobiety
ukrainki
randkowanie
randkowanie
ladne kobiety
ladne kobiety
dziewczyny
ladne kobiety
randki
randkowanie
randkowanie
kobiety
ukrainki
ladne kobiety
randkowanie
randki
dziewczyny
randkowanie
ladne kobiety
randki
kobiety
ladne kobiety
kobiety
ukrainki
randkowanie
ukrainki
dziewczyny
ladne kobiety
kobiety
randki
kobiety
randkowanie
randki
ladne kobiety
kobiety
ladne kobiety
kobiety
randki
randkowanie
randki
ladne kobiety
dziewczyny
dziewczyny
dziewczyny
randki
kobiety
ladne kobiety
ladne kobiety
dziewczyny
dziewczyny
randki
ukrainki
ladne kobiety
kobiety
randkowanie
dziewczyny
ladne kobiety
ukrainki
randkowanie
randkowanie
dziewczyny
ladne kobiety
randkowanie
ladne kobiety
randkowanie
randkowanie
kobiety
dziewczyny
kobiety
dziewczyny
randkowanie
dziewczyny
ukrainki
ladne kobiety
ukrainki
randkowanie
ladne kobiety
dziewczyny
ukrainki
ukrainki
dziewczyny
dziewczyny
randkowanie
ladne kobiety
kobiety
kobiety
ukrainki
ladne kobiety
randkowanie
randkowanie
dziewczyny
ukrainki
dziewczyny
randki
randki
ladne kobiety
ukrainki
kobiety
dziewczyny
ladne kobiety
ukrainki
randki
dziewczyny
randkowanie
ukrainki
dziewczyny
dziewczyny
ladne kobiety
randkowanie
kobiety
ukrainki
kobiety
randkowanie
kobiety
dziewczyny
kobiety
randkowanie
randkowanie
ukrainki
kobiety
dziewczyny
ukrainki
ukrainki
randkowanie
dziewczyny
ladne kobiety
randkowanie
dziewczyny
ukrainki
ukrainki
dziewczyny
randkowanie
ukrainki
kobiety
ukrainki
randki
randkowanie
dziewczyny
ukrainki
randki
randki
ladne kobiety
ladne kobiety
kobiety
randki
ukrainki
dziewczyny
randkowanie
ukrainki
kobiety
ladne kobiety
dziewczyny
dziewczyny
randki
dziewczyny
kobiety
ladne kobiety
dziewczyny
randkowanie
dziewczyny
randkowanie
kobiety
kobiety
randkowanie
ukrainki
randkowanie
randki
ukrainki
dziewczyny
randkowanie
dziewczyny
ladne kobiety
randki
kobiety
dziewczyny
randki
ladne kobiety
kobiety
randki
dziewczyny
ladne kobiety
randkowanie
randkowanie
ukrainki
kobiety
dziewczyny
dziewczyny
dziewczyny
dziewczyny
randkowanie
kobiety
ukrainki
dziewczyny
randki
ukrainki
randkowanie
kobiety
dziewczyny
ladne kobiety
dziewczyny
ladne kobiety
ladne kobiety
ukrainki
randki
kobiety
dziewczyny
randkowanie
ladne kobiety
randkowanie
kobiety
randkowanie
kobiety
kobiety
kobiety
dziewczyny
ukrainki
kobiety
randki
randki
ladne kobiety
dziewczyny
kobiety
ukrainki
randkowanie
ukrainki
ladne kobiety
randkowanie
kobiety
dziewczyny
dziewczyny
kobiety
ukrainki
randki
randki
ladne kobiety
kobiety
dziewczyny
ladne kobiety
dziewczyny
ukrainki
ladne kobiety
dziewczyny
ladne kobiety
randki
ukrainki
randkowanie
ukrainki
ukrainki
randkowanie
randkowanie
ukrainki
randki
kobiety
kobiety
randkowanie
ladne kobiety
kobiety
dziewczyny
randkowanie
kobiety
kobiety
ukrainki
randki
dziewczyny
dziewczyny
randkowanie
ukrainki
randkowanie
randkowanie
dziewczyny
dziewczyny
randki
ukrainki
kobiety
randki
ukrainki
kobiety
randkowanie
ukrainki
randkowanie
kobiety
dziewczyny
randkowanie
randki
randki
ladne kobiety
randkowanie
kobiety
dziewczyny
randki
randki
kobiety
randkowanie
ukrainki
ladne kobiety
randkowanie
ladne kobiety
kobiety
ladne kobiety
ukrainki
randki
ladne kobiety
ukrainki
kobiety
kobiety
kobiety
randki
kobiety
ladne kobiety
randki
randki
ukrainki
ladne kobiety
kobiety
randki
ukrainki
randkowanie
ukrainki
ukrainki
dziewczyny
dziewczyny
kobiety
ukrainki
kobiety
randkowanie
ladne kobiety
ukrainki
dziewczyny
ladne kobiety
dziewczyny
randkowanie
kobiety
randki
randkowanie
randkowanie
randkowanie
randkowanie
kobiety
dziewczyny
ladne kobiety
ladne kobiety
ukrainki
randkowanie
ladne kobiety
dziewczyny
randkowanie
kobiety
ladne kobiety
ladne kobiety
dziewczyny
dziewczyny
kobiety
randki
dziewczyny
kobiety
randki
ladne kobiety
kobiety
ukrainki
randki
randkowanie
randki
randki
randki
randki
dziewczyny
dziewczyny
ukrainki
ladne kobiety
dziewczyny
randkowanie
randki
ladne kobiety
ladne kobiety
randki
dziewczyny
randkowanie
randki
kobiety
ladne kobiety
ladne kobiety
randkowanie
dziewczyny
ukrainki
ladne kobiety
randkowanie
ukrainki
ladne kobiety
ukrainki
kobiety
dziewczyny
ukrainki
ukrainki
dziewczyny
ukrainki
kobiety
kobiety
ladne kobiety
kobiety
dziewczyny
dziewczyny
ladne kobiety
randki
randki
randkowanie
ladne kobiety
kobiety
ladne kobiety
kobiety
ladne kobiety
randkowanie
randki
kobiety
ukrainki
ukrainki
dziewczyny
randkowanie
ladne kobiety
kobiety
randkowanie
dziewczyny
dziewczyny
randkowanie
ukrainki
randkowanie
dziewczyny
dziewczyny
dziewczyny
ukrainki
randki
kobiety
ukrainki
kobiety
randkowanie
dziewczyny
ukrainki
ukrainki
ladne kobiety
randkowanie
randki
dziewczyny
ladne kobiety
kobiety
"http://en.sulseam.com/bbs/board.php?bo_table=free&wr_id=252870" says:
### Смотреть русские сериалы онлайн
Русские сериалы пользуются огромной популярностью среди зрителей благодаря своей разнообразной тематике, качественной актерской игре и захватывающим сюжетам. Сегодня у нас есть уникальная возможность наслаждаться лучшими русскими сериалами онлайн, не выходя из дома.
**Преимущества просмотра русских сериалов онлайн**
1. **Доступность**. Онлайн-платформы предлагают огромный выбор русских сериалов, которые можно смотреть в любое время и в любом месте. Это особенно удобно для тех, кто имеет плотный график и не может подстраиваться под телевизионные трансляции.
2. **Бесплатность**. Множество сайтов предлагают бесплатный просмотр сериалов, что позволяет экономить на подписках и кабельном телевидении. Пользователи могут наслаждаться любимыми шоу без дополнительных затрат.
3. **Высокое качество**. Современные онлайн-платформы обеспечивают высокое качество видео и звука, что позволяет наслаждаться сериалами в наилучшем качестве. Многие сайты предлагают сериалы в формате HD и даже 4K.
4. **Разнообразие контента**. В интернете можно найти русские сериалы на любой вкус: от классических драм и комедий до современных детективов и фантастики. Это позволяет каждому зрителю найти что-то по своему вкусу.
**Популярные жанры русских сериалов**
– **Драмы**. Сериалы, основанные на глубоких человеческих историях, всегда находят отклик у зрителей. Примеры: “Доктор Рихтер”, “Тест на беременность”.
– **Комедии**. Легкие и забавные сериалы, которые поднимают настроение. Примеры: “Кухня”, “Интерны”.
– **Детективы**. Захватывающие истории с расследованиями и неожиданными поворотами сюжета. Примеры: “Мажор”, “След”.
– **Исторические**. Сериалы, рассказывающие о важных событиях и личностях в истории России. Примеры: “Екатерина”, “София”.
– **Фантастика и мистика**. Увлекательные сюжеты с элементами фантастики и мистики. Примеры: “Тайны следствия”, “Метод”.
**Где смотреть русские сериалы онлайн**
Существует множество платформ, предлагающих просмотр русских сериалов онлайн. .
Смотрите русские сериалы онлайн и наслаждайтесь качественным контентом в удобное для вас время. Это отличный способ расслабиться, получить новые впечатления и узнать больше о современной русской культуре.
Check out my website – http://xn--ec6bu5jgta99m.com/bbs/board.php?bo_table=free&wr_id=308
https://www.cucumber7.com/ says:
Valuable stuff, Thanks a lot!
my webpage: https://www.cucumber7.com/
Pedro Mueller says:
Don’t wait any longer to experience the thrill of online slots. Join our casino games free spins no deposit today and embark on an adventure filled with fun, excitement, and endless opportunities to win. With our wide selection of games, generous bonuses, and secure environment, there’s no better place to play. Sign up now and start spinning the reels for your chance to hit the jackpot!
купить юридический адрес цена says:
купить юридический адрес цена
바카라사이트 says:
Scratch-Off games are exciting instant-win titles that provide fast-paced action.
My web page https://nearwin.us/%EC%B9%B4%EC%A7%80%EB%85%B8%EC%82%AC%EC%9D%B4%ED%8A%B8-%EB%8D%94-%ED%81%B0-%EC%83%81%EA%B8%88%EC%9D%84-%EC%9C%84%ED%95%9C-%EC%97%AC%EC%A0%95/
Rebecca Gwinn says:
Детективное агентство «Главк» предлагает широкий спектр услуг для обеспечения безопасности и решения различных задач. Наши специалисты помогут вам в проведении юридического сопровождения бизнеса, проверке контрагентов и поставщиков, а также предоставят выписку из реестра.
арбитражный юрист спб
Мы осуществляем поиск людей, в том числе розыск преступников, должников и родственников, а также проверку человека на розыск. Наши детективы могут найти владельца автомобиля или провести конкурентную разведку.(url)
Для семейных пар доступны услуги по проверке мужа или жены, включая сбор информации о человеке, слежку за ребёнком, мужем или женой, а также поиск свидетелей ДТП.(url)Мы также предлагаем услуги по проверке мигрантов, что включает сбор необходимых документов и информации.
Наши специалисты обладают необходимыми навыками и опытом для проведения качественной и оперативной работы.
выписка из банка по расчетному счету образец
китай доставка says:
Доставка из Китая с таможенными услугами – это профессиональное решение для импорта товаров из Китая, включающее в себя организацию перевозки, таможенное оформление и сопутствующие услуги. Мы предоставляем полный спектр услуг, связанных https://tamozhne.ru/tamojennii-broker/ включая организацию международных перевозок, таможенное оформление, сертификацию и страхование грузов. Наши специалисты помогут вам выбрать оптимальный маршрут и вид транспорта, оформить необходимые документы и декларации, а также проконсультируют по вопросам налогообложения и таможенного законодательства.
Bruce Teague says:
Устали от ограничений традиционных платформ для онлайн-покупок? Kraken даркнет предлагает свежий взгляд на ситуацию! Благодаря обширному выбору уникальных товаров и простому процессу регистрации кракен даркнет в тор обеспечивает вам то, что вы ищете. Воспользуйтесь анонимностью с помощью кода захоронения kraken6 at , и воспользуйтесь надежными методами оплаты. Присоединяйтесь к kraken darknet прямо сейчас и преобразите свой опыт онлайн-шопинга.
Helena McKellar says:
Готовы познакомиться с будущим онлайн-шопинга? Обратите внимание на kraken darknet tor! Благодаря инновационным функциям, таким как зеркало TOR и интегрированный Google TFA, ссылка на кракен обеспечивает безопасность и удобство при покупках. Изучите широкий спектр категорий и товаров и насладитесь гибкостью вариантов оплаты, включая криптовалюту Bitcoin. Присоединяйтесь к ссылка на кракен сейчас и окунитесь в мир беззаботного онлайн-шопинга.
Justine Russell says:
Детективное агентство «Главк» предлагает широкий спектр услуг для обеспечения безопасности и решения различных задач. Наши специалисты помогут вам в проведении юридического сопровождения бизнеса, проверке контрагентов и поставщиков, а также предоставят выписку из реестра.
агентство экономической безопасности новосибирск
Мы осуществляем поиск людей, в том числе розыск преступников, должников и родственников, а также проверку человека на розыск. Наши детективы могут найти владельца автомобиля или провести конкурентную разведку.(url)
Для семейных пар доступны услуги по проверке мужа или жены, включая сбор информации о человеке, слежку за ребёнком, мужем или женой, а также поиск свидетелей ДТП.(url)Мы также предлагаем услуги по проверке мигрантов, что включает сбор необходимых документов и информации.
Наши специалисты обладают необходимыми навыками и опытом для проведения качественной и оперативной работы.
оптимизация налогового учета
Vickey Naylor says:
Thanks for your marvelous posting! I actually enjoyed reading it, you may be a great author. I will remember to bookmark your blog and will eventually come back in the future. I want to encourage you continue your great writing, have a nice weekend!
토토친구 says:
It takes months or even years to develop betting expertise and bankroll management.
Stop by my page … https://Outofthepublicsquare.com/%EB%A9%94%EC%9D%B4%EC%A0%80%EC%82%AC%EC%9D%B4%ED%8A%B8%EC%9D%98-%EC%84%B8%EA%B3%84%EB%A1%9C-%EC%97%AC%ED%96%89%ED%95%98%EA%B8%B0/
Tayla Hain says:
Независимо от того, ищете ли вы высокодоходные сберегательные счета,
взять займ инвестиционные фонды с низкой комиссией или персонализированные консультации по финансовому планированию, у нас есть все необходимое, чтобы помочь вам достичь ваших финансовых целей.
рефинансирование кредитных карт
Принимайте обоснованные финансовые решения с помощью нашего каталога финансовых продуктов. С нашей помощью вы можете легко сравнить функции, преимущества и комиссии различных финансовых продуктов, чтобы найти решение
кредитная карта виртуальная, которое лучше всего соответствует вашим потребностям и бюджету. Начните прямо сейчас и откройте для себя мир финансовых возможностей.
деньги займ
loan Calculator says:
He said it would lower typical annual revenue in the student https://Cream-Lemon-H6HP2G.Mystrikingly.com/blog/8145e705bcb program by $24 billion a year over the next decade.
Adam Stobie says:
Вам надоело искать компромисс между уверенностью и комфортом? 2kmp предлагает оптимальное сочетание! Благодаря передовым средствам защиты и интуитивно понятному интерфейсу kraken darknet гарантирует безопасные и удобные онлайн-покупки. Присоединяйтесь без электронной почты и откройте для себя огромный выбор товаров. Присоединяйтесь к ссылка на кракен тор сейчас и покупайте с уверенностью и спокойствием.
Jonnie Aldrich says:
This page truly has all of the information and facts I needed about this subject and didn’t know who to ask.
Irvin Weisz says:
I am not certain the place you are getting your information, however good topic. I must spend a while studying more or figuring out more. Thanks for wonderful information I was in search of this information for my mission.
how to get a job in Korea says:
You said it perfectly.!
Stop by my homepage https://penzu.com/p/1ebb11f0ad2d6a11
Connie Whitehouse says:
whoah this weblog is wonderful i really like studying your articles. Stay up the good work! You understand, many people are looking around for this information, you could help them greatly.
Mitzi Alford says:
With havin so much content do you ever run into any issues of plagorism or copyright violation? My blog has a lot of completely unique content I’ve either authored myself or outsourced but it appears a lot of it is popping it up all over the web without my authorization. Do you know any ways to help prevent content from being ripped off? I’d really appreciate it.
Monique Clarkson says:
промокод 1xbet на сегодня россия
powerball says:
Go to the Benefits web page if you are wanting to uncover winning numbers from much more recent draws.
My webpage https://thewholeof.co.uk/profile/DelphiaFor
Jill Heron says:
Hiya! I know this is kinda off topic but I’d figured I’d ask. Would you be interested in exchanging links or maybe guest writing a blog article or vice-versa? My blog addresses a lot of the same topics as yours and I think we could greatly benefit from each other. If you might be interested feel free to send me an e-mail. I look forward to hearing from you! Wonderful blog by the way!
Dian Shelby says:
There is certainly a lot to find out about this subject. I love all the points you have made.
Mariano Ali says:
If you are going for finest contents like I do, simply pay a visit this web site daily as it presents quality contents, thanks
Jamila Killian says:
Для получения диплома, вам необходимо успешно завершить обучение в учебном заведении, выполнить все требования программы обучения и успешно сдать все необходимые экзамены. После этого вам будет выдан диплом,
подтверждающий вашу квалификацию и успешное завершение учебы.
у нас вы можете приобрести дипломы такие как
купить диплом в ижевске
У нас можно заказать и купить диплом о переподготовке
все проходит 24-attestats.com
в официальном порядке обращайтесь за консультацией мы вам все обьясним
123
Matilda Behan says:
Hey! I understand this is sort of off-topic however I needed to ask. Does running a well-established website such as yours take a lot of work? I’m brand new to operating a blog however I do write in my diary everyday. I’d like to start a blog so I can easily share my personal experience and thoughts online. Please let me know if you have any kind of ideas or tips for brand new aspiring bloggers. Thankyou!
Indiana Eggleston says:
I’m gone to say to my little brother, that he should also pay a visit this webpage on regular basis to take updated from newest information.
Diyarbakir Eskort Rehberi says:
bookmarked!!, I really like your blog!
My web blog: https://takahashikanichiro.Tokyo.jp/input-output
nhà Cái 8xbet says:
I am continually browsing online for ideas that can facilitate me. Thx!
Also visit my web blog; https://ieclassified.net/index.php?page=user&action=pub_profile&id=8990
Diyarbakir ofis Escortlari says:
It’s going to be finish of mine day, but before finish I am reading this enormous piece of writing to increase my knowledge.
my page :: https://pipewiki.org/app/index.php/User:MHIAleisha
Shantell Neagle says:
What’s Going down i’m new to this, I stumbled upon this I have discovered It absolutely helpful and it has helped me out loads. I am hoping to contribute & aid other users like its helped me. Good job.
Denis Hardee says:
Принимайте обоснованные финансовые решения с помощью нашего каталога финансовых продуктов.
займ деньгиВы сможете легко сравнить функции, преимущества и комиссии различных финансовых продуктов,
займ деньги чтобы найти решение, которое лучше всего соответствует вашим потребностям и бюджету. Начните прямо сейчас и откройте для себя мир финансовых возможностей.займ
Наше удобное руководство по финансовым продуктам поможет вам сориентироваться в сложном мире финансов. Будь то традиционные банковские услуги или инновационные финтех-решения, мы предоставим вам всю необходимую информацию для принятия обоснованных финансовых решений.
оформить дебетовую картуПосетите наш каталог сегодня и сделайте следующий шаг к достижению ваших финансовых целей.
Jaclyn Lienhop says:
Great work! This is the type of information that are supposed to be shared around the web. Disgrace on Google for no longer positioning this post upper! Come on over and discuss with my site . Thanks =)
슬롯사이트 추천 says:
Hi it’s me, I am also visiting this web page daily, this web page is really nice and the users are in fact sharing good thoughts.
My homepage … https://2fyhyftlzlp4Leketj4wxss46Uu63Ndjj2itbpmi55c2k4nxnynq.Webpkgcache.com/doc/-/s/Bookmarkforest.com%2Fstory17269374%2Fjohn-ascuaga-s-nugget-casino-reviewed-by-thehooks
check here says:
The promo is exclusive to Pennsylvania players, and the wagering needs are fairly low for the matched funds — 15x for slots.
Here is my webpage; https://abesstu.affiliatblogger.com/79702398/%ed%86%a0%ed%86%a0%eb%aa%a8%ec%95%84-%eb%a8%b9%ed%8a%80-%eb%b0%a9%ec%a7%80-%ec%a0%84%eb%9e%b5
메이저사이트 says:
There, Caesars College Football Promo Code $1000 1st Bet Bonus if their 1st bet loses.
my homepage :: https://eidnaqp.blogsidea.com/33645423/%ed%86%a0%ed%86%a0%eb%aa%a8%ec%95%84-%eb%a8%b9%ed%8a%80-%eb%b0%a9%ec%a7%80%ec%9d%98-%eb%b9%84%eb%b0%80-%eb%85%b8%ed%95%98%ec%9a%b0
click Here says:
These reside casino games have been optimized to provide clarity, specifically when playing mobile roulette games.
My web site; https://Dedignat.ru/component/k2/itemlist/user/31540
Kory Williamson says:
No matter if some one searches for his essential thing, thus he/she wants to be available that in detail, so that thing is maintained over here.
Mellissa Savage says:
Pretty nice post. I just stumbled upon your blog and wanted to say that I have truly enjoyed surfing around your blog posts. After all I will be subscribing to your rss feed and I hope you write again soon!
Venus Hockman says:
BA
vapers.in.ua says:
Even so, only a portion of casino operators is worth your time and cash.
My web-site: https://Vapers.in.ua/proxy.php?link=https://milkyway.cs.rpi.edu/milkyway/show_user.php?userid=6981371
Luisa Kelso says:
Good day 🙂
What an nice article!
Can I scrape this and share this with my website members?
My members is about Korean 성인게시판
you are interested, feel free to come to my group and have a look.
Thanks a lot and Keep up the good work!
Nannie Swafford says:
Hi, all the time i used to check weblog posts here in the early hours in the break of day, since i like to gain knowledge of more and more.
Jacqueline Shiels says:
Hiya! I know this is kinda off topic however , I’d figured I’d ask. Would you be interested in exchanging links or maybe guest writing a blog post or vice-versa? My website covers a lot of the same topics as yours and I believe we could greatly benefit from each other. If you might be interested feel free to shoot me an e-mail. I look forward to hearing from you! Wonderful blog by the way! kobiety
ladne kobiety
dziewczyny
ladne kobiety
ladne kobiety
randkowanie
ukrainki
dziewczyny
randkowanie
ladne kobiety
ukrainki
ladne kobiety
ukrainki
randki
dziewczyny
dziewczyny
randki
kobiety
dziewczyny
dziewczyny
ukrainki
kobiety
randkowanie
randkowanie
randki
randki
randki
ladne kobiety
dziewczyny
kobiety
ladne kobiety
randki
dziewczyny
kobiety
dziewczyny
ladne kobiety
dziewczyny
dziewczyny
kobiety
ukrainki
dziewczyny
ladne kobiety
randkowanie
ladne kobiety
randki
ukrainki
randki
dziewczyny
dziewczyny
ladne kobiety
randkowanie
ukrainki
randkowanie
randki
ukrainki
randkowanie
ladne kobiety
randki
dziewczyny
ukrainki
ukrainki
ukrainki
ladne kobiety
randkowanie
dziewczyny
ukrainki
dziewczyny
dziewczyny
kobiety
ukrainki
randkowanie
randkowanie
randkowanie
ukrainki
randki
dziewczyny
ladne kobiety
ladne kobiety
ukrainki
kobiety
kobiety
ladne kobiety
kobiety
randkowanie
ukrainki
ukrainki
randki
dziewczyny
ukrainki
kobiety
randkowanie
kobiety
kobiety
ukrainki
dziewczyny
kobiety
randki
randkowanie
randkowanie
ukrainki
randki
dziewczyny
randkowanie
ladne kobiety
ladne kobiety
randkowanie
ladne kobiety
randkowanie
ladne kobiety
randkowanie
dziewczyny
kobiety
kobiety
kobiety
dziewczyny
randki
ladne kobiety
randki
kobiety
ladne kobiety
dziewczyny
ladne kobiety
randki
ukrainki
randki
randki
kobiety
ladne kobiety
ukrainki
kobiety
dziewczyny
dziewczyny
ladne kobiety
kobiety
randki
dziewczyny
kobiety
ladne kobiety
ukrainki
randkowanie
ladne kobiety
kobiety
randki
ukrainki
kobiety
dziewczyny
randkowanie
kobiety
ukrainki
randkowanie
ladne kobiety
kobiety
dziewczyny
ladne kobiety
ukrainki
ladne kobiety
kobiety
ladne kobiety
dziewczyny
ukrainki
dziewczyny
ukrainki
randki
randkowanie
randki
ladne kobiety
randkowanie
ukrainki
randki
randki
dziewczyny
ukrainki
randkowanie
ladne kobiety
ladne kobiety
ukrainki
ladne kobiety
randkowanie
ladne kobiety
randkowanie
randki
ladne kobiety
kobiety
randkowanie
kobiety
randkowanie
ladne kobiety
dziewczyny
kobiety
kobiety
kobiety
kobiety
ladne kobiety
randkowanie
randkowanie
randki
ukrainki
randkowanie
ladne kobiety
kobiety
dziewczyny
kobiety
randkowanie
ukrainki
randki
randki
randkowanie
kobiety
randki
randkowanie
ukrainki
kobiety
kobiety
dziewczyny
kobiety
kobiety
dziewczyny
ukrainki
ladne kobiety
ladne kobiety
dziewczyny
ukrainki
randkowanie
ukrainki
ladne kobiety
dziewczyny
dziewczyny
randki
kobiety
ukrainki
ladne kobiety
ladne kobiety
dziewczyny
ladne kobiety
kobiety
randki
kobiety
randki
ukrainki
randkowanie
ukrainki
ladne kobiety
dziewczyny
ladne kobiety
ladne kobiety
ukrainki
randkowanie
dziewczyny
ladne kobiety
ladne kobiety
randkowanie
dziewczyny
dziewczyny
randki
randkowanie
ukrainki
kobiety
dziewczyny
kobiety
dziewczyny
randkowanie
dziewczyny
randki
ukrainki
kobiety
ukrainki
randki
dziewczyny
randki
ladne kobiety
ukrainki
randki
ukrainki
kobiety
ladne kobiety
ladne kobiety
randki
ukrainki
kobiety
ukrainki
randki
kobiety
ukrainki
dziewczyny
kobiety
ladne kobiety
dziewczyny
ukrainki
kobiety
ukrainki
ukrainki
randki
randki
randki
randkowanie
kobiety
randki
ladne kobiety
kobiety
ukrainki
dziewczyny
kobiety
kobiety
randkowanie
ladne kobiety
randki
ukrainki
dziewczyny
dziewczyny
randkowanie
kobiety
ukrainki
randki
kobiety
ladne kobiety
dziewczyny
ukrainki
ukrainki
randkowanie
ukrainki
randki
ukrainki
kobiety
kobiety
kobiety
randkowanie
dziewczyny
dziewczyny
kobiety
dziewczyny
randki
dziewczyny
randkowanie
randki
dziewczyny
kobiety
randkowanie
ukrainki
randkowanie
randki
randkowanie
randkowanie
dziewczyny
kobiety
ukrainki
dziewczyny
kobiety
randki
kobiety
dziewczyny
ukrainki
randkowanie
dziewczyny
randkowanie
ukrainki
dziewczyny
dziewczyny
randki
ladne kobiety
randkowanie
dziewczyny
kobiety
kobiety
ladne kobiety
ladne kobiety
randkowanie
randkowanie
randkowanie
ladne kobiety
kobiety
randkowanie
ladne kobiety
ladne kobiety
dziewczyny
kobiety
kobiety
ladne kobiety
ladne kobiety
kobiety
ukrainki
kobiety
randkowanie
ladne kobiety
ladne kobiety
randki
randki
dziewczyny
ukrainki
ukrainki
ukrainki
ukrainki
randki
randki
randkowanie
ladne kobiety
ukrainki
ladne kobiety
randkowanie
ladne kobiety
ladne kobiety
randkowanie
ukrainki
kobiety
dziewczyny
ukrainki
randki
dziewczyny
ukrainki
randkowanie
ukrainki
ladne kobiety
ladne kobiety
kobiety
ukrainki
ladne kobiety
ladne kobiety
dziewczyny
ladne kobiety
dziewczyny
ladne kobiety
randki
randki
kobiety
ukrainki
randkowanie
kobiety
kobiety
ukrainki
randkowanie
ladne kobiety
ladne kobiety
ladne kobiety
dziewczyny
kobiety
randkowanie
dziewczyny
randki
ladne kobiety
ladne kobiety
ukrainki
ladne kobiety
kobiety
randkowanie
randkowanie
kobiety
dziewczyny
ukrainki
ladne kobiety
dziewczyny
dziewczyny
randkowanie
kobiety
ukrainki
ladne kobiety
randki
dziewczyny
dziewczyny
kobiety
ladne kobiety
dziewczyny
dziewczyny
ukrainki
kobiety
randki
ladne kobiety
kobiety
dziewczyny
ladne kobiety
randki
dziewczyny
randki
ladne kobiety
randkowanie
dziewczyny
randkowanie
dziewczyny
kobiety
randki
dziewczyny
kobiety
kobiety
ladne kobiety
ukrainki
randki
ukrainki
ladne kobiety
dziewczyny
randkowanie
ladne kobiety
ladne kobiety
randkowanie
kobiety
randkowanie
ukrainki
dziewczyny
ladne kobiety
randkowanie
ukrainki
kobiety
kobiety
ladne kobiety
kobiety
dziewczyny
ladne kobiety
dziewczyny
randkowanie
dziewczyny
randki
ladne kobiety
ladne kobiety
ukrainki
ukrainki
randkowanie
ladne kobiety
randkowanie
randkowanie
dziewczyny
randkowanie
randki
dziewczyny
randkowanie
dziewczyny
kobiety
ukrainki
randki
randki
kobiety
ladne kobiety
randkowanie
randki
randkowanie
kobiety
ladne kobiety
randki
ladne kobiety
ukrainki
randki
randkowanie
ukrainki
ladne kobiety
randkowanie
kobiety
randki
ukrainki
kobiety
randkowanie
randkowanie
randki
ladne kobiety
dziewczyny
dziewczyny
dziewczyny
dziewczyny
randkowanie
kobiety
randkowanie
ladne kobiety
dziewczyny
kobiety
randki
randkowanie
ukrainki
dziewczyny
kobiety
kobiety
ladne kobiety
kobiety
dziewczyny
kobiety
randki
dziewczyny
kobiety
dziewczyny
randki
kobiety
randkowanie
randki
dziewczyny
ukrainki
dziewczyny
randki
ukrainki
dziewczyny
ladne kobiety
dziewczyny
ukrainki
randki
randki
kobiety
ladne kobiety
ladne kobiety
ladne kobiety
randkowanie
dziewczyny
kobiety
randkowanie
dziewczyny
randkowanie
dziewczyny
ladne kobiety
dziewczyny
randki
randki
randkowanie
randki
ladne kobiety
ukrainki
kobiety
kobiety
kobiety
ukrainki
randkowanie
ladne kobiety
dziewczyny
dziewczyny
ukrainki
randki
randkowanie
randkowanie
randki
dziewczyny
randki
dziewczyny
ukrainki
ukrainki
ukrainki
dziewczyny
ukrainki
randki
dziewczyny
randkowanie
ukrainki
ukrainki
dziewczyny
randkowanie
ladne kobiety
dziewczyny
randki
ukrainki
randkowanie
dziewczyny
randki
dziewczyny
dziewczyny
ladne kobiety
ladne kobiety
randki
kobiety
randkowanie
ukrainki
kobiety
randkowanie
kobiety
ukrainki
randkowanie
dziewczyny
dziewczyny
kobiety
ladne kobiety
ukrainki
ukrainki
dziewczyny
randki
kobiety
randki
ladne kobiety
ukrainki
kobiety
ladne kobiety
randkowanie
ladne kobiety
kobiety
dziewczyny
ukrainki
dziewczyny
ladne kobiety
randkowanie
randki
randki
randkowanie
ladne kobiety
dziewczyny
ladne kobiety
randkowanie
kobiety
ladne kobiety
randkowanie
dziewczyny
kobiety
ukrainki
ladne kobiety
randkowanie
kobiety
randki
kobiety
ukrainki
ladne kobiety
randki
kobiety
randkowanie
randki
randkowanie
ladne kobiety
randki
randkowanie
randkowanie
randki
ukrainki
kobiety
randki
kobiety
dziewczyny
randki
dziewczyny
ukrainki
ukrainki
ladne kobiety
randki
randkowanie
randkowanie
ukrainki
randkowanie
randki
kobiety
kobiety
randki
ladne kobiety
ladne kobiety
kobiety
kobiety
kobiety
randkowanie
ladne kobiety
ukrainki
ladne kobiety
ladne kobiety
dziewczyny
randki
randkowanie
randki
dziewczyny
randki
randki
randki
randki
randki
randki
ukrainki
ladne kobiety
ladne kobiety
ukrainki
ladne kobiety
ukrainki
kobiety
randki
dziewczyny
dziewczyny
randki
randkowanie
kobiety
kobiety
ukrainki
ukrainki
dziewczyny
randkowanie
randki
ladne kobiety
dziewczyny
kobiety
randkowanie
ukrainki
dziewczyny
ukrainki
dziewczyny
dziewczyny
kobiety
ladne kobiety
dziewczyny
randkowanie
randkowanie
ladne kobiety
ladne kobiety
dziewczyny
ladne kobiety
randkowanie
kobiety
kobiety
randkowanie
randkowanie
randki
ukrainki
randki
randkowanie
kobiety
kobiety
dziewczyny
kobiety
kobiety
randki
kobiety
kobiety
randkowanie
randki
dziewczyny
dziewczyny
kobiety
ladne kobiety
randki
kobiety
ladne kobiety
randkowanie
randki
ukrainki
randki
ladne kobiety
kobiety
randki
ladne kobiety
kobiety
kobiety
randkowanie
randkowanie
randkowanie
randkowanie
dziewczyny
ukrainki
randki
ladne kobiety
dziewczyny
randkowanie
ladne kobiety
ladne kobiety
ukrainki
ukrainki
randkowanie
kobiety
dziewczyny
kobiety
kobiety
randkowanie
ukrainki
randki
randki
ukrainki
ladne kobiety
dziewczyny
randki
ukrainki
dziewczyny
kobiety
ladne kobiety
dziewczyny
kobiety
randkowanie
randkowanie
ukrainki
kobiety
kobiety
randki
kobiety
randki
dziewczyny
dziewczyny
randki
randkowanie
ladne kobiety
ladne kobiety
randki
ukrainki
randkowanie
randki
ladne kobiety
dziewczyny
randkowanie
ukrainki
ukrainki
randkowanie
kobiety
dziewczyny
kobiety
ukrainki
kobiety
dziewczyny
ukrainki
kobiety
randki
randkowanie
ukrainki
kobiety
randkowanie
dziewczyny
randkowanie
randki
ladne kobiety
ukrainki
dziewczyny
ukrainki
randkowanie
dziewczyny
kobiety
kobiety
dziewczyny
randkowanie
randkowanie
ladne kobiety
randkowanie
ladne kobiety
randkowanie
randkowanie
ladne kobiety
ladne kobiety
ukrainki
randkowanie
dziewczyny
dziewczyny
randki
dziewczyny
ladne kobiety
kobiety
dziewczyny
randkowanie
ukrainki
kobiety
randkowanie
dziewczyny
dziewczyny
dziewczyny
ladne kobiety
kobiety
ukrainki
kobiety
kobiety
kobiety
randki
randkowanie
randkowanie
randkowanie
ladne kobiety
ladne kobiety
randkowanie
randki
randki
kobiety
kobiety
ukrainki
ukrainki
randki
randki
ukrainki
dziewczyny
ladne kobiety
dziewczyny
randkowanie
dziewczyny
randkowanie
kobiety
Felicitas Furlong says:
What’s up!
What an nice article!
May I scrape it and share this with my community members?
My channel is about Korean BJ야동
If your interested, feel free to visit my channel and have a look.
Thanks a lot and Keep up the good work!
Candice Lance says:
Appreciate this post. Let me try it out.
무료로또예상번호받기 says:
It is unlikely to add new kinds of games or variations on bonuses.
Here is my page – https://www.longisland.com/profile/bjtedison548590
Corinne Reaves says:
You actually make it appear really easy with your presentation but I in finding this topic to be actually one thing that I think I’d by no means understand. It sort of feels too complex and extremely huge for me. I’m having a look forward to your next submit, I will try to get the dangle of it!
bar알바 says:
If your passive revenue is in the millions of dollars, of course, your possible savings from this maneuver are far bigger.
Here is my homepage: https://qnabuddy.com/233483/lights-camera-paycheck-thriving-world-entertainment-part
직장인대출 says:
Kudos, Ample information.
Also visit my page … https://apr51.answerblogs.com/27928189/student-loans-top-providers
남성알바 says:
Employers have been identified via a portal where they could inform the State that they would welcome newly authorized men and women into their workforce.
my blog post :: https://365.expresso.blog/question/mastering-the-art-of-host-bar-job-acceptance-a-mixologists-guide-to-success/
Astrid Boose says:
Hey! This is my first visit to your blog! We are a group of volunteers and starting a new initiative in a community in the same niche. Your blog provided us valuable information to work on. You have done a marvellous job!
Maura Passmore says:
Hello There. I found your blog using msn. This is an extremely well written article. I’ll make sure to bookmark it and return to read more of your useful info. Thanks for the post. I will definitely comeback.
Maximilian Case says:
This post is actually a fastidious one it helps new internet viewers, who are wishing for blogging.
Sabina Fagan says:
Hi there! I just wanted to ask if you ever have any issues with hackers? My last blog (wordpress) was hacked and I ended up losing months of hard work due to no data backup. Do you have any methods to stop hackers?
Adolph Jury says:
Hello my family member! I wish to say that this article is awesome, great written and include almost all vital infos. I would like to see more posts like this .
Ngan Baez says:
I’ve been browsing online more than 3 hours nowadays, yet I never discovered any attention-grabbing article like yours. It’s beautiful value enough for me. Personally, if all site owners and bloggers made just right content as you probably did, the web will likely be a lot more useful than ever before.
바카라사이트 says:
Studying the guidelines is the ideal way to get ahead when playing at a table games casino.
my web blog … https://Woodsrunners.com/index.php/Spin_Your_Way_To_Fortune:_An_Exciting_Journey_Into_The_World_Of_Online_Slot_Games
Lila Bruntnell says:
This is a topic which is near to my heart… Best wishes! Where are your contact details though?
온라인 슬롯 says:
I’ve been exploring for a little for any high quality articles or weblog posts in this kind of area . Exploring in Yahoo I at last stumbled upon this website. Studying this information So i am satisfied to convey that I’ve a very just right uncanny feeling I found out just what I needed. I so much for sure will make certain to do not put out of your mind this site and provides it a look on a relentless basis.
Feel free to visit my blog post … https://igrev.kr/bbs/board.php?bo_table=free&wr_id=2473523
단기알바 says:
It can also limit the diversity of believed and perspectives that are crucial for innovation and progress.
Here is my site … https://dleweb.ru/user/MyronDaigre8/
스웨디시 어때 says:
All 3 are accused of one count of conspiracy and two counts of sex trafficking of a minor.
Also visit my webpage; https://awaydays.org/Broadcast/members/FionaMuniz2/
Auto Loan Calculator says:
You made the point!
Feel free to visit my web-site: https://debt84.bloggerchest.com/27662234/credit-loans-top-providers
powerball says:
Your details will only be utilized in promotional advertising with your prior consent.
Feel free to surf to my blog post – https://www.sediul.ro/index.php/Rev_Up_Your_Life_With_Speed_Kino:_Fast_Fun_And_Fabulous
บาคาร่าเว็บตรง says:
สวัสดีทุกคน! พึ่งได้ลองเล่นบาคาร่า 666ที่ บาคาร่าทดลองเล่นฟรี แล้วต้องบอกว่าติดอกติดใจมากจ้ะ อินเตอร์เฟซใช้งานง่าย เล่นได้ลื่นไหลไม่มีสะดุด รวมทั้งที่สำคัญมีโปรโมชั่นดีๆให้เลือกเยอะแยะ อีกทั้งสมาชิกใหม่และเก่า ผู้ใดกันที่กำลังมองหาบาคาร่าเว็บตรง 777เล่น เสนอแนะตรงนี้เลยนะ ไม่ผิดหวังแน่นอน!
파워볼 사이트 says:
Monday was the 34th drawing for the present jackpot, Powerball stated.
Here is my web page … https://prohunt.su/index.php/SammyD456135812963
Proper Keto Ingredients says:
Keto diets have gained immense popularity in recent years due to their ability to promote weight loss and improve overall health.
my web-site – http://jinos.com/bbs/board.php?bo_table=free&wr_id=273729
Mack Piscitelli says:
Thanks for sharing your thoughts about %meta_keyword%. Regards
Iva Ingamells says:
I do not even know how I ended up here, but I thought this post was good. I don’t know who you are but certainly you’re going to a famous blogger if you aren’t already 😉 Cheers!
"https://mangatal.uk/index.php/Winrating.ru" says:
Футбольная статистика, расписание и результаты матчей играют важную роль для болельщиков, тренеров и аналитиков. Эта информация позволяет следить за выступлениями команд и игроков, а также прогнозировать исходы будущих встреч.
Статистика включает в себя различные показатели:
Голы и результативные передачи
Владение мячом
Удары по воротам
Фолы и карточки
Угловые удары
Расписание матчей обычно публикуется в начале сезона, но может корректироваться из-за различных факторов. Оно помогает болельщикам планировать посещение игр и просмотр трансляций.
Результаты матчей оперативно обновляются на официальных сайтах лиг и клубов, а также в спортивных приложениях. Они включают не только счет, но и основные события игры.
Анализ этих данных позволяет оценить форму команд, выявить сильные и слабые стороны, что важно для тренеров при подготовке к будущим матчам.
My web site: http://feiradorolomogi.com.br/classificados/author/charmain21f/
Tory Savage says:
Hi there, I log on to your blog on a regular basis. Your writing style is witty, keep up the good work!
Judi Reddick says:
ZipRecruiter will also suggest jobs primarily based on its exclusive matching technology.
Vito Bourget says:
Keep this going please, great job!
Swedish massage deep tissue says:
The massage chair targets the back and foot area collectively, or you can do just a neck https://e-academy.navttc.gov.pk/blog/index.php?entryid=59808.
forum.prolifeclinics.Ro says:
Reside betting on rugby is an selection at each of the half-dozen sportsbooks in this overview.
my blog post http://forum.prolifeclinics.ro/profile.php?id=1329430
สล็อตเว็บตรง says:
สวัสดีทุกคน ผมพึ่งได้ทดลองเล่น สล็อตเว็บตรงไม่ผ่านเอเย่นต์ ไม่มีขั้นต่ำ 2024 และจำเป็นต้องบอกเลยว่าชอบใจมากมาย การซึ่งสามารถเล่นเล่นเกมสล็อตออนไลน์ได้โดยตรงกับผู้ให้บริการโดยไม่ต้องผ่านเอเย่นต์ ทำให้เชื่อมั่นได้ในเรื่องของความปลอดภัยและก็ความเป็นธรรม ไม่ต้องวิตกกังวลหัวข้อการทุจริตเลยครับผม
สิ่งที่ผมถูกใจสูงที่สุดคือ ไม่มีกฎเกณฑ์อย่างต่ำสำหรับการฝากถอน ทำให้ไม่ว่าจะมีงบประมาณเท่าใดก็สามารถเข้ามาเล่นได้ ทำให้ทุกคนมีโอกาสบันเทิงใจและชนะรางวัลได้เท่าเทียมกัน นอกจากนั้น ยังมีโปรโมชั่นรวมทั้งโบนัสที่น่าสนใจมาก ซึ่งช่วยเพิ่มจังหวะในการชนะรางวัลใหญ่ได้อีกด้วย
ระบบของเกมมีความเสถียรและก็กราฟิกสวยงาม ทำให้ประสบการณ์การเล่นน่าตื่นตาตื่นใจและก็เพลิดเพลินเจริญใจเยอะขึ้นเรื่อยๆ ผมคิดว่าถ้าผู้ใดที่ยังไม่เคยลองเล่นเว็บตรงสล็อตไม่ผ่านเอเย่นต์ ควรลองดูขอรับ รับรองว่าจะไม่ผิดหวังแน่นอน
ถ้าหากมีคนไหนกันแน่เคยทดลองเล่นแล้ว หรือมีปริศนาอะไรเกี่ยวกับสล็อตเว็บไซต์ตรง สามารถคุยกันได้นะครับ ยินดีแลกประสบการณ์และช่วยเหลือทุกคนครับ
ขอให้ทุกคนบันเทิงใจกับการเล่นสล็อตแล้วก็โชคดีนะครับ
Cecelia Wymer says:
AH
Gay says:
The practice encourages you to put your self first by carving out time and ritualizing self-care in theory, this has a good ripple impact on your wellness.
my web blog: https://agf-wiki.dk/index.php/User:JorgeMessier
Leroy Falk says:
All other payments are processed within 5 days, which is just about sector normal.
"https://doordoctor.co.kr/bbs/board.php?bo_table=free&wr_id=163500" says:
ТК АзияТорг: Надежный Партнер в Мире Сетевого и Телекоммуникационного Оборудования
В современном бизнесе успех определяется скоростью и качеством коммуникаций. ТК АзияТорг, с более чем пятилетним опытом, представляет собой ведущего поставщика сетевого и телекоммуникационного оборудования, а также серверов для бизнеса. Наши клиенты и партнеры доверяют нам благодаря нашему безупречному обслуживанию и высококачественной продукции.
## Почему ТК АзияТорг?
### Широкий Ассортимент Оборудования
Мы предлагаем широкий спектр сетевого и телекоммуникационного оборудования, а также серверов, которые идеально подходят для любых бизнес-задач. Наша продукция отвечает самым высоким стандартам качества и надежности, что обеспечивает бесперебойную работу ваших систем.
### Профессиональное Сотрудничество
Более пяти лет успешного сотрудничества с клиентами и поставщиками доказывают нашу репутацию надежного партнера. Мы всегда стремимся к долгосрочным и взаимовыгодным отношениям, предлагая индивидуальный подход и гибкие условия сотрудничества.
### Филиал в Гуанчжоу
Наличие собственного филиала в Гуанчжоу позволяет нам быть ближе к нашим азиатским партнерам и поставщикам, что обеспечивает оперативные поставки и конкурентные цены. Это стратегическое расположение также дает нам возможность быстро реагировать на изменения рынка и потребности клиентов.
### Комплексные Финансово-Логистические Услуги
Мы предлагаем финансово-логистические услуги “под ключ”, которые включают в себя все этапы — от закупки оборудования до его доставки и установки. Наши эксперты берут на себя все заботы, связанные с транспортировкой и таможенным оформлением, что позволяет вам сосредоточиться на развитии бизнеса.
## Доверие и Качество
ТК АзияТорг стремится предоставлять только лучшее оборудование и услуги, чтобы помочь вашему бизнесу достигать новых высот. Мы гордимся нашей репутацией и всегда нацелены на совершенствование всех аспектов нашей деятельности. Доверяйте нам, и вы получите надежного партнера, который всегда готов поддержать ваш бизнес и помочь ему расти.
Свяжитесь с нами сегодня и узнайте, как ТК АзияТорг может помочь вашему бизнесу стать еще успешнее!
Here is my blog post – https://www.vancouverrowingclub.wiki/index.php/User:LuisaKoontz1
Romeo says:
Right now, the Florida Lottery raises beneficial funds for educational initiatives in the Sunshine State by way of ticket sales.
Here is my web-site … https://dianemichel.com/index.php/User:StepanieLinsley
"https://toripedia.info/index.php/User:NormanClemmons" says:
ТК АзияТорг: Надежный Партнер в Мире Сетевого и Телекоммуникационного Оборудования
В современном бизнесе успех определяется скоростью и качеством коммуникаций. ТК АзияТорг, с более чем пятилетним опытом, представляет собой ведущего поставщика сетевого и телекоммуникационного оборудования, а также серверов для бизнеса. Наши клиенты и партнеры доверяют нам благодаря нашему безупречному обслуживанию и высококачественной продукции.
## Почему ТК АзияТорг?
### Широкий Ассортимент Оборудования
Мы предлагаем широкий спектр сетевого и телекоммуникационного оборудования, а также серверов, которые идеально подходят для любых бизнес-задач. Наша продукция отвечает самым высоким стандартам качества и надежности, что обеспечивает бесперебойную работу ваших систем.
### Профессиональное Сотрудничество
Более пяти лет успешного сотрудничества с клиентами и поставщиками доказывают нашу репутацию надежного партнера. Мы всегда стремимся к долгосрочным и взаимовыгодным отношениям, предлагая индивидуальный подход и гибкие условия сотрудничества.
### Филиал в Гуанчжоу
Наличие собственного филиала в Гуанчжоу позволяет нам быть ближе к нашим азиатским партнерам и поставщикам, что обеспечивает оперативные поставки и конкурентные цены. Это стратегическое расположение также дает нам возможность быстро реагировать на изменения рынка и потребности клиентов.
### Комплексные Финансово-Логистические Услуги
Мы предлагаем финансово-логистические услуги “под ключ”, которые включают в себя все этапы — от закупки оборудования до его доставки и установки. Наши эксперты берут на себя все заботы, связанные с транспортировкой и таможенным оформлением, что позволяет вам сосредоточиться на развитии бизнеса.
## Доверие и Качество
ТК АзияТорг стремится предоставлять только лучшее оборудование и услуги, чтобы помочь вашему бизнесу достигать новых высот. Мы гордимся нашей репутацией и всегда нацелены на совершенствование всех аспектов нашей деятельности. Доверяйте нам, и вы получите надежного партнера, который всегда готов поддержать ваш бизнес и помочь ему расти.
Свяжитесь с нами сегодня и узнайте, как ТК АзияТорг может помочь вашему бизнесу стать еще успешнее!
My web page; https://vineworks.co.kr/bbs/board.php?bo_table=free&wr_id=347601
M.Helloglobal.Co.Kr says:
You will be sticking to a lot of items as you play roulette for genuine funds.
Here is my blog :: https://m.helloglobal.co.kr/member/login.html?noMemberOrder=&returnUrl=http%3A%2F%2Fwww.longisland.com%2Fprofile%2Fyqomichaela7269
카지노사이트 says:
The online gambling venue place forward two bitcoin baccarat versions in table game and the live casino section of the internet site.
Also visit my website http://FR.Thefreedictionary.com/_/cite.aspx?url=http%3a%2f%2fpeatix.com%2Fuser%2F21923045&word=s%27etendre&sources=kdict
Son Bolton says:
ZW
Pa Lottery says:
The Georgia https://celsius.justbelowthehorizon.com/2014/06/03/soundcloud-post/ was launched in 1992 with the intention of funding various educational initiatives in the state.
Laurene de Castella says:
Everyone loves what you guys are usually up too. This kind of clever work and coverage! Keep up the very good works guys I’ve you guys to my own blogroll.
powerball jackpot says:
The https://wolvesbaneuo.com/wiki/index.php/Zooming_Through_The_Reel:_The_Speed_Kino_Extravaganza for the subsequent drawing on Wednesday is now worth an estimated $572 million soon after no winner emerged from Monday’s drawing.
Nydia Thurston says:
What i do not realize is in reality how you are no longer actually much more neatly-preferred than you might be right now. You are so intelligent. You know therefore significantly on the subject of this subject, made me individually imagine it from so many varied angles. Its like men and women aren’t interested except it’s one thing to do with Lady gaga! Your own stuffs nice. Always deal with it up!
Latrice Franki says:
We are a group of volunteers and starting a new scheme in our community. Your site provided us with valuable information to work on. You have done an impressive job and our entire community will be thankful to you.
https://frieda-Kaffeebar.de says:
The Powerball jackpot for the subsequent drawing on Wednesday has climbed to $188 million following there was no jackpot winner in Monday’s drawing.
My web site – https://frieda-kaffeebar.de/hallo-welt/
Ohio Lottery says:
1 of them arrived in July 2014, when Mary Ann Thompson matched all six numbers with a ticket purchased at Correct North on State Street in Conneaut, and won $124.9 million.
Here is my blog – https://anjumslist.com/index.php?title=User:KlaudiaHeflin1
Https://Prohunt.Su/ says:
SportsBetting3.com has meticulously assessed and reviewed the following sports betting web-sites.
my web page … https://prohunt.su/index.php/LowellBlue2379
Tiffiny Banner says:
Hi there! This is my first visit to your blog! We are a group of volunteers and starting a new project in a community in the same niche. Your blog provided us valuable information to work on. You have done a extraordinary job!
Mai Layne says:
Hey there, I think your website might be having browser compatibility issues. When I look at your website in Ie, it looks fine but when opening in Internet Explorer, it has some overlapping. I just wanted to give you a quick heads up! Other then that, excellent blog!
реклама кракен наркошоп песня says:
Шаг за шагом: Как зарегистрироваться на Кракене и начать пользоваться платформой Kraken — одна из самых
надёжных и популярных криптовалютных бирж в мире.
реклама кракен наркошоп песня Она предлагает широкий спектр услуг, включая торговлю,
хранение и стейкинг цифровых активов.
В этом руководстве мы расскажем вам, как зарегистрироваться на Кракене и начать пользоваться её платформой.
Для начала перейдите на сайт Кракена — реклама кракен наркошоп песня.
В правом верхнем углу нажмите кнопку «Регистрация».
На следующей странице вам нужно будет ввести свой адрес электронной почты,
имя пользователя и пароль.
Проверьте правильность введённых данных и нажмите кнопку «Создать
учётную запись». После этого вам нужно будет
подтвердить свой адрес электронной почты.
Для этого откройте свой почтовый
ящик и найдите письмо от Кракена.
В письме будет ссылка для подтверждения.
Нажмите на эту ссылку, чтобы подтвердить свой адрес электронной почты.
Thad Akers says:
If you are going for most excellent contents like myself, simply visit this web page daily for the reason that it provides quality contents, thanks
Carrie Heney says:
Hey there, You have done a fantastic job. I’ll definitely digg it and personally suggest to my friends. I’m confident they’ll be benefited from this site.
Ken Baughan says:
I know this if off topic but I’m looking into starting my own blog and was curious what all is needed to get setup? I’m assuming having a blog like yours would cost a pretty penny? I’m not very web savvy so I’m not 100% certain. Any tips or advice would be greatly appreciated. Many thanks
Todd Runyan says:
First off I would like to say great blog! I had a quick question in which I’d like to ask if you do not mind. I was interested to find out how you center yourself and clear your thoughts prior to writing. I have had a tough time clearing my thoughts in getting my ideas out there. I truly do enjoy writing however it just seems like the first 10 to 15 minutes are usually wasted just trying to figure out how to begin. Any suggestions or hints? Appreciate it!
Meagan Kirsova says:
Highly descriptive blog, I loved that a lot. Will there be a part 2?
온카 says:
All of the live casino internet sites that we listed here use Evolution Gaming software.
Here is my webpage; http://idahoanimallawyer.com/__media__/js/netsoltrademark.php?d=sites.google.com%2Fview%2Finformation-about-baccaratsite%2Fhome
Alphonse Eller says:
Hi there! Do you know if they make any plugins to help with Search Engine Optimization? I’m trying to get my blog to rank for some targeted keywords but I’m not seeing very good results. If you know of any please share. Many thanks!
Lucille Skaggs says:
Piano transport prijs
Salvatore Simmons says:
I enjoy what you guys tend to be up too. Such clever work and exposure! Keep up the very good works guys I’ve incorporated you guys to my blogroll.
best female jobs without A degree says:
One particular in ten girls with young young children (11%) say they quit https://wiki.tentere.net/index.php?title=Master_The_Art_Of_Juggling:_Becoming_A_Part-Time_Manager job due to the pandemic (Figure 3).
www.reddit.com says:
I’ve been exploring Candy AI for a few weeks now and consider it quite impressive. However, I initially found the pricing structure somewhat unclear. To clarify, Candy AI offers a dual subscription model—both free and paid.
поролон для дивана says:
поролон для дивана
Carolyn Brient says:
Good day 🙂
What an cool blog!
Is it okay I scrape it and share this with my site members?
My channel is about Korean 한국야동
If ever your interested, feel free to visit my site and have a look.
Thanks and Keep up the good work!
part time Remote jobs says:
Lukacs explained that the charge raise is due to the enhanced demand for services by the U of A.
my web blog … https://wiki.adventuresro.com//v1/index.php/Brewing_Success:_The_Perks_And_Quirks_Of_A_Cafe_Part-time_Job
website says:
A third parlay kind is referred to as a teaser bet, which is most popular in football (especially the NFL).
Here is my web-site – https://nohio.org/index.php/User:MiloWaller8
Maximo Marrero says:
I don’t even know how I ended up here, but I thought this post was great. I don’t know who you are but definitely you are going to a famous blogger if you are not already 😉 Cheers!
Hilda Marasco says:
Have you ever considered about adding a little bit more than just your articles? I mean, what you say is important and all. However think of if you added some great images or video clips to give your posts more, “pop”! Your content is excellent but with pics and video clips, this blog could definitely be one of the most beneficial in its field. Terrific blog!
네임드 파워볼 says:
The probabilities of winning the jackpot are 1 in 302,575,350.
my homepage: https://qnabuddy.com/290420/unlocking-the-magic-of-eos-powerball
unsplash.com says:
Verhuisservice voor bedrijven h-transport
Angel Salter says:
My developer is trying to convince me to move to .net from PHP. I have always disliked the idea because of the costs. But he’s tryiong none the less. I’ve been using WordPress on numerous websites for about a year and am nervous about switching to another platform. I have heard very good things about blogengine.net. Is there a way I can import all my wordpress posts into it? Any kind of help would be greatly appreciated!
onlinekaroo.Com says:
Players can also take advantage of the 10% up to $200 money bonus and the 150% up to $750 casino bonus if they want to hit the slots, blackjack, or any casino table.
Take a look at my site … https://onlinekaroo.com/question/betting-your-bottom-dollar-unlocking-the-secrets-of-sports-betting-9/
Ignacio Witt says:
whoah this weblog is fantastic i really like reading your posts. Keep up the great work! You know, lots of persons are looking round for this information, you could help them greatly.
Antonietta Deboer says:
You actually make it seem so easy with your presentation but I find this matter to be really something which I think I would never understand. It seems too complicated and extremely broad for me. I’m looking forward for your next post, I’ll try to get the hang of it!
Candelaria Edens says:
Yan, the former champion, lost this belt through DQ to Aljamain Sterling in 2020.
Part time jobs women says:
An advocate for public education, Lee has served on the executive board as Chair of Public Education Partners and is the founder and director of Study Up Greenville, a young adult, and middle grades book festival in downtown Greenville, SC.
My website: http://rctvproducciones.net/__media__/js/netsoltrademark.php?d=misozes.blogspot.com%2F2024%2F06%2Fblog-post_11.html
Cyrus Trimm says:
Wow that was unusual. I just wrote an very long comment but after I clicked submit my comment didn’t show up. Grrrr… well I’m not writing all that over again. Anyway, just wanted to say great blog!
Boris Stinnett says:
Nice post. I was checking constantly this blog and I’m impressed! Very useful info particularly the last part 🙂 I care for such info much. I was seeking this certain information for a long time. Thank you and best of luck.
Claudiokapobel.Com says:
The technical answer is that yes, you can count cards in baccarat.
Take a look at my website: https://claudiokapobel.com/the-big-design-wall-likes-pictures/
슈어맨 says:
Use bonus code “CSGOBONUS” for a leg up in your early games, with benefits such as cost-free coins and enhanced winning odds.
Feel free to visit my homepage … https://woodsrunners.com/index.php/Exploring_The_Exciting_World_Of_Sports_Gambling
Ilse Gertz says:
Благодарю за подробное описание процесса! Как менеджер киевской мастерской “Автомаляр”, я хочу поделиться, что наша команда делает ставку на качество и довольные отзывы наших клиентов.
Методы, которые вы описали, полностью совпадают с нашими практиками, особенно когда дело касается использования современного оборудования и материалов. Благодаря этому наши клиенты всегда получают автомобили, выглядящие как новые.
Для тех, кто ищет надежную мастерскую по покраске в Киеве, “Автомаляр” – это ваш лучший выбор. Мы готовы обсудить ваши пожелания и подобрать оптимальные варианты.
С нетерпением ожидаю новых статей, ваши посты всегда на высоте.
Всего наилучшего, руководитель сервиса покраски “Автомаляр”.
온카 says:
Some players bet on hot numbers, or most recent winning ones, whilst some only play roulette live variants with a low property edge.
Here is my web blog https://twistedrootspod.com/index.php/User:IsabelleCantwell
파워봂 패턴 says:
Yes, you might Advance Play JACKPOT TRIPLE PLAY for up to 30 consecutive draws.
My webpage :: https://twistedrootspod.com/index.php/Experience_Speed_Kino:_An_Exhilarating_Cinematic_Journey
part time jobs hiring near me says:
The most striking figure to emerge from this research is 58 percent.
my web blog :: https://pacs.ksg.ac.ke/blog/index.php?entryid=99866
www.nak.wiki says:
The tribe also gives a sports betting app that only operates on these A single-Stop locations.
Here is my homepage https://www.nak.wiki/view/Exceptional_Insights_On_Korean_Sports_Gambling_Site
슈어맨 says:
Braces are expensive, so please bet within your implies otherwise your kids will have crooked teeth.
Feel free to surf to my homepage – https://perpetualodyssey.net/index.php?title=The_Thrilling_World_Of_Korean_Gambling_Sites
Brenda Ligertwood says:
ขอบคุณสำหรับบทความที่น่าดึงดูดนี้! ผมขอเสนอแนะ slot เว็บตรงไม่ผ่านเอเย่นต์ เพิ่มเติมอีกนะครับ เป็นslot เว็บตรง มีระบบระเบียบระบบฝากถอน autoที่สะดวกมากๆฝากถอนไม่มีขั้นต่ำ แถมยังใช้เทคโนโลยีการเข้ารหัส SSL เพื่อให้เกิดความปลอดภัยในการทำธุรกรรม ข้อดีอีกอย่างเป็นเกมเว็บตรงไม่ผ่านเอเย่นต์ 2024จากผู้พัฒนาชั้นแนวหน้าจำนวนมาก เล่นแล้วรู้สึกไม่เป็นอันตรายและได้รับความยุติธรรม ลองเข้าไปดูเสริมเติมถึงที่กะไว้ เว็บสล็อตออนไลน์เว็บตรง นะครับ
okumchistory.wiki says:
As a sweepstakes platform, get to grips with High 5’s Game Coins, Sweeps Coins, and Diamonds, and you could be searching at genuine cashouts with no prior deposits.
Feel free to visit my site … https://okumchistory.wiki/index.php/A_Comprehensive_Guide_On_How_To_Play_Online_Slot
단기알바 says:
At the time Catholic girls occupied the throne in three countries—Catherine de Médicis was queen consort in France, Mary of Guise (1515–1560 regent 1554–59) was regent in Scotland, and Mary I led England.
my site; https://govsys.net/index.php/Scouting_The_Stars:_Mastering_Entertainment_Establishment_Recruitment
Stewart Egger says:
Good day 🙂
What a nice post!
Can I scrape this and share this with my site subscribers?
My channel is about Korean 야튜브
If you are interested, feel free to visit my site and check it out.
Thanks and Keep up the good work!
Kristen Chapa says:
For the full list of items that are not allowed onboard the flight, head over to our Dangerous articles page. The size of your bag needs to be a maximum of 23 x 36 x 56cm (that’s around 9 x 14 x 22 inches). © Copyright 2024 Louisvuittonreplicas.
replica designer
replica designer
fake designer bags
fake bags
replica bags online
replica designer
replica bags
replica bags
replica designer
replica designer
fake designer bags
replica bags
replica bags
fake bags online
replica bags
fake bags online
replica bags online
replica bags
fake bags online
replica bags online
replica bags
replica bags online
fake designer bags
fake designer bags
replica bags
student loan Pause says:
The bill also allows survivors of domestic violence or economic abuse, or borrowers who are unable to reach the other borrower, to submit an person application.
Also visit my website :: http://latinabootyclub.com/__media__/js/netsoltrademark.php?d=www.cheaperseeker.com%2Fu%2Ftraceetanaka98
온카 says:
Games will contribute a percentage towards finishing the supply needs.
my homepage … https://Www.Sghiphop.com:443/index.php/Spin_To_Win:_Navigating_The_Ultimate_Slot_Site_Experience
"http://www.safeusdrone.com/bbs/board.php?bo_table=free&wr_id=162702" says:
## Discover the Best Fiverr Gigs to Boost Your Business
In the ever-evolving digital landscape, finding the right resources to enhance your business can be a game-changer. Whether you’re an entrepreneur, a small business owner, or a freelancer, leveraging the power of Fiverr can help you achieve your goals more efficiently. Fiverr, the world’s largest marketplace for digital services, offers a plethora of gigs that cater to various needs. From graphic design to SEO optimization, there’s something for everyone. Let’s dive into the best Fiverr gigs that can take your business to the next level.
### 1. Stunning Logo Design
Your logo is the face of your brand, and having a professionally designed logo is crucial for making a lasting impression. On Fiverr, you can find top-rated logo designers who offer unique and creative designs tailored to your brand identity. These gigs provide multiple design concepts, unlimited revisions, and even brand guidelines to ensure your logo perfectly represents your business.
### 2. Engaging Social Media Content
In today’s digital age, a strong social media presence is essential for any business. Fiverr offers a range of gigs that specialize in creating engaging content for platforms like Instagram, Facebook, and Twitter. From eye-catching graphics to compelling captions, these gigs can help you maintain a consistent and appealing social media feed that attracts and retains followers.
### 3. SEO Optimization
Search engine optimization (SEO) is a critical component of online success. Fiverr’s SEO experts can analyze your website, identify areas for improvement, and implement strategies to boost your search engine rankings. Whether you need keyword research, on-page optimization, or backlink building, these gigs can significantly enhance your online visibility and drive organic traffic to your site.
### 4. Professional Video Editing
Video content is king in the digital marketing world. Fiverr hosts a variety of skilled video editors who can transform your raw footage into polished, professional videos. Whether you need promotional videos, explainer videos, or social media clips, these gigs offer high-quality editing, special effects, and animation services to captivate your audience.
### 5. Compelling Copywriting
Effective communication is key to converting visitors into customers. Fiverr’s copywriters specialize in crafting compelling and persuasive content that resonates with your target audience. From website copy and blog posts to product descriptions and email campaigns, these gigs can help you convey your message clearly and convincingly, boosting your brand’s credibility and sales.
### 6. Custom Website Development
A well-designed website is the cornerstone of your online presence. Fiverr’s web developers offer custom website design and development services to create a site that’s not only visually appealing but also user-friendly and responsive. Whether you need an e-commerce site, a personal blog, or a corporate website, these gigs provide comprehensive solutions tailored to your specific requirements.
### 7. Effective Digital Marketing
Fiverr is home to numerous digital marketing experts who can devise and execute marketing strategies to grow your business. From PPC advertising and social media marketing to email campaigns and influencer outreach, these gigs offer a range of services to enhance your brand’s online presence and drive targeted traffic to your website.
### 8. Innovative Graphic Design
Beyond logo design, Fiverr offers a myriad of graphic design services to meet all your branding needs. Whether you need business cards, brochures, infographics, or banners, these gigs provide innovative and professional designs that make your brand stand out. High-quality visuals can significantly impact your marketing efforts, and Fiverr’s designers are equipped to deliver exceptional results.
### 9. Reliable Virtual Assistance
Managing a business involves juggling multiple tasks, and sometimes you need an extra pair of hands. Fiverr’s virtual assistants offer a range of services, including administrative support, customer service, data entry, and project management. These gigs can help you streamline your operations and focus on the core aspects of your business.
### 10. Comprehensive Branding Services
If you’re looking to build a cohesive brand identity, Fiverr’s branding experts can help. These gigs offer comprehensive branding packages that include logo design, brand strategy, messaging, and visual identity development. A strong brand can set you apart from the competition, and Fiverr’s professionals are adept at creating memorable and impactful brand experiences.
### Conclusion
Fiverr is a treasure trove of services that can propel your business forward. By leveraging the best Fiverr gigs, you can access top-tier talent and expertise at affordable prices, allowing you to focus on what you do best. Whether you need design, marketing, content creation, or technical support, Fiverr’s marketplace has you covered. Start exploring today and unlock the full potential of your business with the best Fiverr gigs available.
Have a look at my site :: https://thevesti.com/wiki/index.php/User:JedBarkly7032
Phil Pelloe says:
В последние годы роль волонтерской деятельности в жизни молодежи значительно возросла, особенно в контексте поступления в высшие учебные заведения. Волонтерская деятельность стала не только формой социальной активности, но и важным фактором при приеме на обучение в вузы. Актуальным инструментом, подтверждающим участие абитуриентов в волонтерских проектах, является волонтерская книжка.
### Что такое волонтерская книжка?
Волонтерская книжка — это официальный документ, который содержит записи о всех мероприятиях, участвовавших в которых абитуриент принимал участие в качестве волонтера. Эта книжка подтверждает участие в определенных проектах, часы волонтерской работы и часто включает оценки руководителей проектов.
### Зачем нужна волонтерская книжка при поступлении в вуз?
1. **Дополнительные баллы.** Некоторые вузы вводят дополнительные баллы к вступительным испытаниям за волонтерскую деятельность. Это может стать решающим фактором при поступлении, особенно если конкурс на выбранную специальность высок.
2. **Подтверждение социальной активности.** Вузы ценят студентов, которые проявляют инициативу и участвуют в жизни общества. Волонтерская книжка служит подтверждением такой активности и заинтересованности в решении социальных проблем.
3. **Личностное развитие.** Документированное участие в волонтерских проектах также показывает личные качества абитуриента: организованность, умение работать в команде, социальную ответственность.
### Как получить волонтерскую книжку?
Волонтерская книжка обычно выдается организациями, занимающимися волонтерской деятельностью. Для получения такой книжки нужно:
– **Присоединиться к волонтерским проектам.** Это могут быть социальные, экологические, культурные или спортивные мероприятия.
– **Систематически участвовать в мероприятиях.** Чем больше проектов и чем активнее участие, тем полнее будет волонтерская книжка.
– **Записывать все свои деятельности.** Каждое участие должно быть задокументировано, включая отзывы руководителей и количество отработанных часов.
### Заключение
Волонтерская книжка при поступлении в вуз не только может увеличить шансы на успешное поступление, но и подчеркивает важность социальной ответственности и личностного роста. Волонтерство открывает для молодежи не только возможности для обучения, но и путь к развитию лидерских качеств и улучшению общества в целом.
토토친구 says:
News outlets turn to Covers for our earned reputation as a trusted and authoritative supply of sports betting facts.
Feel free to surf to my website :: https://krotcinus.com/etc/413608
zotsangso.Com says:
Group props are also well-known for those with a terrific study on matchups.
Also visit my blog post – https://zotsangso.com/bbs/board.php?bo_table=free&wr_id=34534
Mariano Patton says:
Remarkable things here. I am very satisfied to see your article. Thank you so much and I’m looking ahead to touch you. Will you kindly drop me a e-mail?
온카 says:
No other on the web casino in PA delivers a improved choice of slots than BetMGM.
My page :: https://Artigianix.com/catalog/view/theme/_ajax_view-product_listing.php?product_href=https://jack-ee.tusblogos.com/27759003/top-online-casino-reviews-for-this-year
Muhammad Gerlach says:
### Информационные технологии обучения в вузе: тенденции и перспективы
В современном мире роль информационных технологий в системе образования увеличивается с каждым днём. Вузы по всему миру активно интегрируют в свою учебную деятельность новые технологические решения и подходы, что позволяет не только повысить качество образования, но и сделать его доступнее. В данной статье мы рассмотрим, как информационные технологии влияют на процесс обучения в высших учебных заведениях и какие нововведения ждут студентов и преподавателей в ближайшем будущем.
#### Интеграция информационных технологий
Прежде всего, стоит отметить, что информационные технологии в вузе охватывают широкий спектр инструментов и методов – от систем управления обучением до искусственного интеллекта. Современные образовательные платформы, такие как Moodle, Blackboard или Canvas, позволяют преподавателям создавать онлайн-курсы, проводить тестирования и контролировать успеваемость студентов в режиме реального времени.
#### Мобильное обучение
Мобильные технологии дают студентам возможность учиться в любом месте и в любое время. Приложения для смартфонов и планшетов могут быть использованы для доступа к учебным материалам, выполнения заданий и взаимодействия с преподавателями и однокурсниками. Это делает обучение более гибким и адаптируемым к индивидуальным потребностям каждого студента.
#### Обратная связь в режиме реального времени
Современные информационные системы позволяют предоставлять обратную связь студентам намного быстрее, чем это было раньше. Благодаря автоматизации процесса проверки заданий, студенты могут получать комментарии и оценки почти мгновенно, что способствует более эффективному усвоению материала и корректировке учебного процесса.
#### Виртуальная и дополненная реальность
Технологии виртуальной (VR) и дополненной реальности (AR) находят всё большее применение в высшем образовании. Они позволяют создавать уникальные виртуальные среды для изучения сложных дисциплин, таких как хирургия, архитектура или инженерия. Это не только улучшает понимание студентами материалов, но и значительно усиливает их практические навыки.
#### Искусственный интеллект
Применение искусственного интеллекта в образовании открывает новые горизонты для персонализации учебного процесса. AI может анализировать учебные предпочтения и успеваемость студента, адаптировать образовательный контент и предложить индивидуальные рекомендации по улучшению результатов.
#### Заключение
Информационные технологии обучения в вузе преобразуют традиционные подходы к образованию, делая его более интерактивным, гибким и эффективным. Важно, чтобы учебные заведения продолжали следить за новейшими технологическими трендами и интегрировать их в образовательный процесс, чтобы обеспечить своим студентам наиболее качественное и востребованное образование.
Shela Carrozza says:
Hi fantastic website! Does running a blog similar to this take a large amount of work? I have no expertise in programming but I had been hoping to start my own blog soon. Anyways, should you have any recommendations or techniques for new blog owners please share. I know this is off subject however I just needed to ask. Cheers!
ilimochampa.Org says:
Instead, all players have to bet the funds on wagers that meet particular conditions.
Have a look at my web blog: http://ilimochampa.org/?p=93
криптобосс зеркало says:
Казино Криптобосс: Ваш путь к успеху в мире криптоигр
криптобосс зеркало
Bebe Scarf says:
Hey there! This post could not be written any better! Reading through this post reminds me of my previous room mate! He always kept talking about this. I will forward this page to him. Pretty sure he will have a good read. Thank you for sharing!
"https://www.finhi.ai/bbs/board.php?bo_table=free&wr_id=131498" says:
## Unlock Real Winnings: The Best Casino Apps That Pay Real Money
In the ever-evolving world of online gaming, casino apps have revolutionized how we experience the thrill of gambling. The allure of winning real money from the comfort of your smartphone is irresistible. With countless options available, choosing the right casino app can be daunting. Fear not! We’ve curated a guide to help you find the best casino apps that pay real money, ensuring a safe, exciting, and potentially lucrative experience.
### Why Choose Casino Apps That Pay Real Money?
Casino apps that offer real money payouts provide a convenient and exhilarating way to enjoy your favorite casino games. Here are a few reasons why these apps are gaining immense popularity:
1. **Convenience**: Play anytime, anywhere. Whether you’re commuting, relaxing at home, or on a break at work, casino apps are always at your fingertips.
2. **Variety of Games**: From classic table games like blackjack and roulette to exciting slots and poker, these apps offer a vast array of games to suit every player’s taste.
3. **Real Money Rewards**: Unlike free casino apps, these platforms give you the opportunity to win real cash, adding an extra layer of excitement and motivation.
4. **Bonuses and Promotions**: Casino apps often provide enticing bonuses, free spins, and promotions, enhancing your chances of winning big.
### Top Casino Apps That Pay Real Money
To ensure you have a seamless and rewarding experience, here are some of the top-rated casino apps known for their reliability, security, and lucrative payouts:
#### 1. **Betway Casino App**
Betway is a renowned name in the online gambling industry, and its app lives up to the brand’s reputation. Offering a wide range of games, including slots, blackjack, roulette, and live dealer options, Betway provides a secure and user-friendly platform. The app also boasts generous welcome bonuses and ongoing promotions to maximize your winning potential.
#### 2. **888 Casino App**
888 Casino is a veteran in the online casino world, and its app is a testament to its excellence. With a sleek design and an extensive game library, 888 Casino offers everything from slots and jackpots to table games and live casino experiences. The app ensures secure transactions and prompt payouts, making it a favorite among real money players.
#### 3. **LeoVegas Casino App**
LeoVegas is known for its mobile-first approach, making it one of the best casino apps for real money gaming. The app features a vast selection of games from top providers, including immersive live dealer games. LeoVegas is also praised for its swift and hassle-free withdrawal process, allowing you to enjoy your winnings without delay.
#### 4. **Royal Panda Casino App**
Royal Panda combines a fun and engaging gaming experience with the opportunity to win real money. The app offers a rich variety of games, including popular slots, table games, and live casino options. With its easy-to-navigate interface and secure payment methods, Royal Panda ensures a smooth and rewarding gaming journey.
#### 5. **Jackpot City Casino App**
As the name suggests, Jackpot City is all about big wins. This app offers a comprehensive selection of games, including progressive jackpot slots that can yield life-changing payouts. With its user-friendly design and top-notch security measures, Jackpot City provides a trustworthy platform for real money gambling.
### Tips for Maximizing Your Winnings
To make the most of your real money casino app experience, consider these tips:
1. **Choose Reputable Apps**: Stick to well-known and licensed casino apps to ensure fair play and secure transactions.
2. **Take Advantage of Bonuses**: Utilize welcome bonuses, free spins, and other promotions to boost your bankroll and increase your chances of winning.
3. **Manage Your Bankroll**: Set a budget and stick to it. Avoid chasing losses and know when to take a break.
4. **Play Smart**: Familiarize yourself with the rules and strategies of the games you play. Knowledge can significantly enhance your winning potential.
### Conclusion
Casino apps that pay real money offer an exciting and convenient way to enjoy the thrill of gambling while giving you the chance to win actual cash. By choosing reputable apps like Betway, 888 Casino, LeoVegas, Royal Panda, and Jackpot City, you can ensure a secure and rewarding gaming experience. So, download your preferred app, take advantage of the bonuses, and get ready to unlock real winnings! Happy gaming!
Feel free to surf to my web-site – http://soljiero.com/bbs/board.php?bo_table=free&wr_id=69084
"https://nextsemi-skku.co.kr/bbs/board.php?bo_table=free&wr_id=26008" says:
## Unlock Real Winnings: The Best Casino Apps That Pay Real Money
In the ever-evolving world of online gaming, casino apps have revolutionized how we experience the thrill of gambling. The allure of winning real money from the comfort of your smartphone is irresistible. With countless options available, choosing the right casino app can be daunting. Fear not! We’ve curated a guide to help you find the best casino apps that pay real money, ensuring a safe, exciting, and potentially lucrative experience.
### Why Choose Casino Apps That Pay Real Money?
Casino apps that offer real money payouts provide a convenient and exhilarating way to enjoy your favorite casino games. Here are a few reasons why these apps are gaining immense popularity:
1. **Convenience**: Play anytime, anywhere. Whether you’re commuting, relaxing at home, or on a break at work, casino apps are always at your fingertips.
2. **Variety of Games**: From classic table games like blackjack and roulette to exciting slots and poker, these apps offer a vast array of games to suit every player’s taste.
3. **Real Money Rewards**: Unlike free casino apps, these platforms give you the opportunity to win real cash, adding an extra layer of excitement and motivation.
4. **Bonuses and Promotions**: Casino apps often provide enticing bonuses, free spins, and promotions, enhancing your chances of winning big.
### Top Casino Apps That Pay Real Money
To ensure you have a seamless and rewarding experience, here are some of the top-rated casino apps known for their reliability, security, and lucrative payouts:
#### 1. **Betway Casino App**
Betway is a renowned name in the online gambling industry, and its app lives up to the brand’s reputation. Offering a wide range of games, including slots, blackjack, roulette, and live dealer options, Betway provides a secure and user-friendly platform. The app also boasts generous welcome bonuses and ongoing promotions to maximize your winning potential.
#### 2. **888 Casino App**
888 Casino is a veteran in the online casino world, and its app is a testament to its excellence. With a sleek design and an extensive game library, 888 Casino offers everything from slots and jackpots to table games and live casino experiences. The app ensures secure transactions and prompt payouts, making it a favorite among real money players.
#### 3. **LeoVegas Casino App**
LeoVegas is known for its mobile-first approach, making it one of the best casino apps for real money gaming. The app features a vast selection of games from top providers, including immersive live dealer games. LeoVegas is also praised for its swift and hassle-free withdrawal process, allowing you to enjoy your winnings without delay.
#### 4. **Royal Panda Casino App**
Royal Panda combines a fun and engaging gaming experience with the opportunity to win real money. The app offers a rich variety of games, including popular slots, table games, and live casino options. With its easy-to-navigate interface and secure payment methods, Royal Panda ensures a smooth and rewarding gaming journey.
#### 5. **Jackpot City Casino App**
As the name suggests, Jackpot City is all about big wins. This app offers a comprehensive selection of games, including progressive jackpot slots that can yield life-changing payouts. With its user-friendly design and top-notch security measures, Jackpot City provides a trustworthy platform for real money gambling.
### Tips for Maximizing Your Winnings
To make the most of your real money casino app experience, consider these tips:
1. **Choose Reputable Apps**: Stick to well-known and licensed casino apps to ensure fair play and secure transactions.
2. **Take Advantage of Bonuses**: Utilize welcome bonuses, free spins, and other promotions to boost your bankroll and increase your chances of winning.
3. **Manage Your Bankroll**: Set a budget and stick to it. Avoid chasing losses and know when to take a break.
4. **Play Smart**: Familiarize yourself with the rules and strategies of the games you play. Knowledge can significantly enhance your winning potential.
### Conclusion
Casino apps that pay real money offer an exciting and convenient way to enjoy the thrill of gambling while giving you the chance to win actual cash. By choosing reputable apps like Betway, 888 Casino, LeoVegas, Royal Panda, and Jackpot City, you can ensure a secure and rewarding gaming experience. So, download your preferred app, take advantage of the bonuses, and get ready to unlock real winnings! Happy gaming!
Feel free to visit my web page; http://hanseattle1.com/bbs/board.php?bo_table=free&wr_id=125660
"https://www.hanatechltd.com/bbs/board.php?bo_table=free&wr_id=13046" says:
## Unlock Real Winnings: The Best Casino Apps That Pay Real Money
In the ever-evolving world of online gaming, casino apps have revolutionized how we experience the thrill of gambling. The allure of winning real money from the comfort of your smartphone is irresistible. With countless options available, choosing the right casino app can be daunting. Fear not! We’ve curated a guide to help you find the best casino apps that pay real money, ensuring a safe, exciting, and potentially lucrative experience.
### Why Choose Casino Apps That Pay Real Money?
Casino apps that offer real money payouts provide a convenient and exhilarating way to enjoy your favorite casino games. Here are a few reasons why these apps are gaining immense popularity:
1. **Convenience**: Play anytime, anywhere. Whether you’re commuting, relaxing at home, or on a break at work, casino apps are always at your fingertips.
2. **Variety of Games**: From classic table games like blackjack and roulette to exciting slots and poker, these apps offer a vast array of games to suit every player’s taste.
3. **Real Money Rewards**: Unlike free casino apps, these platforms give you the opportunity to win real cash, adding an extra layer of excitement and motivation.
4. **Bonuses and Promotions**: Casino apps often provide enticing bonuses, free spins, and promotions, enhancing your chances of winning big.
### Top Casino Apps That Pay Real Money
To ensure you have a seamless and rewarding experience, here are some of the top-rated casino apps known for their reliability, security, and lucrative payouts:
#### 1. **Betway Casino App**
Betway is a renowned name in the online gambling industry, and its app lives up to the brand’s reputation. Offering a wide range of games, including slots, blackjack, roulette, and live dealer options, Betway provides a secure and user-friendly platform. The app also boasts generous welcome bonuses and ongoing promotions to maximize your winning potential.
#### 2. **888 Casino App**
888 Casino is a veteran in the online casino world, and its app is a testament to its excellence. With a sleek design and an extensive game library, 888 Casino offers everything from slots and jackpots to table games and live casino experiences. The app ensures secure transactions and prompt payouts, making it a favorite among real money players.
#### 3. **LeoVegas Casino App**
LeoVegas is known for its mobile-first approach, making it one of the best casino apps for real money gaming. The app features a vast selection of games from top providers, including immersive live dealer games. LeoVegas is also praised for its swift and hassle-free withdrawal process, allowing you to enjoy your winnings without delay.
#### 4. **Royal Panda Casino App**
Royal Panda combines a fun and engaging gaming experience with the opportunity to win real money. The app offers a rich variety of games, including popular slots, table games, and live casino options. With its easy-to-navigate interface and secure payment methods, Royal Panda ensures a smooth and rewarding gaming journey.
#### 5. **Jackpot City Casino App**
As the name suggests, Jackpot City is all about big wins. This app offers a comprehensive selection of games, including progressive jackpot slots that can yield life-changing payouts. With its user-friendly design and top-notch security measures, Jackpot City provides a trustworthy platform for real money gambling.
### Tips for Maximizing Your Winnings
To make the most of your real money casino app experience, consider these tips:
1. **Choose Reputable Apps**: Stick to well-known and licensed casino apps to ensure fair play and secure transactions.
2. **Take Advantage of Bonuses**: Utilize welcome bonuses, free spins, and other promotions to boost your bankroll and increase your chances of winning.
3. **Manage Your Bankroll**: Set a budget and stick to it. Avoid chasing losses and know when to take a break.
4. **Play Smart**: Familiarize yourself with the rules and strategies of the games you play. Knowledge can significantly enhance your winning potential.
### Conclusion
Casino apps that pay real money offer an exciting and convenient way to enjoy the thrill of gambling while giving you the chance to win actual cash. By choosing reputable apps like Betway, 888 Casino, LeoVegas, Royal Panda, and Jackpot City, you can ensure a secure and rewarding gaming experience. So, download your preferred app, take advantage of the bonuses, and get ready to unlock real winnings! Happy gaming!
Here is my website; https://www.windo.co.kr/bbs/board.php?bo_table=free&wr_id=882957
Collin Hoang says:
I was suggested this blog by my cousin. I am not sure whether this post is written by him as nobody else know such detailed about my problem. You are incredible! Thanks!
Jina Worrell says:
QA
Angel Shetler says:
UR
portugues.ru says:
Truly a good deal of great tips.
гама казино зеркало says:
Присоединяйтесь к Gama Casino и начните выигрывать гама казино зеркало
Jamison Lockyer says:
Modern life and our eating practices can be demanding to our systems, and if we don’t act, these stressors can take a toll on our bodies and minds. So whether it’s an overload of chocolate from the Easter binge, your office chair makes your back beg for mercy, or another long day with the one in charge makes your head throb, standard Thai massage might be simply what you need. The advantages of Thai massage might be really 21st century however they have their roots in ancient Eastern practices developed over thousands of years. It’s all a long way from the experience you may have had of requirement, Westernised massage. Performed on a special Thai mat in loose-fitting clothes, a therapist extends your body through a series of techniques comparable to yoga applies and postures pressure to particular points along the energy lines of your body. Thai massage is excellent both physically and psychologically.
It can increase flexibility, enhance muscle tone, increase movement, release muscle stress, correct poor posture and fight stress. How? Well, conventional specialists think that by assisting energy to stream easily around the body once again they’re able to ease the symptoms of persistent discomfort and improve psychological wellbeing. A 2015 review of scientific trials found that every released study reports benefits in post-treatment pain reduction. Some research study concludes that standard Thai massage results in a reduction in discomfort of as much as 80% with the benefits kept for over 3 months at a time, consisting of enhancements in muscle stress, versatility and even anxiety. Findings published in the International Journal of Neuroscience recommend that massage therapy has favorable impacts on the hormonal agents and chemicals that regulate state of minds by decreasing cortisol and increasing both serotonin and dopamine. This effective triple action can help in reducing depression and promote happiness. Obviously, beyond the dry science, Thai yoga massage also simply feels actually, really nice. Guided by an experienced therapist, purposeful extending combined with well-established pressure methods helps soothes the muscles and enhance blood flow, leaving you relaxed and calm, ready to handle anything. Welcome to pain and stress management, Thai-style. We welcome you to come in and experience the magic of a Thai yoga Massage on your own. To reserve your Thai yoga massage at Castle Thai Spa, click here.
Body-to-body massage, also known as B2B massage, is a sensual and intimate kind of massage that includes the use of not simply hands, however the whole body to offer relaxation and enjoyment. In this post, we will explore the different elements of body-to-body massage, including its origins, methods, benefits, and security precautions. Whether you are a specialist or somebody thinking about experiencing this unique kind of massage, this post will offer you with valuable insights and details. Let’s begin by acquiring a much deeper understanding of body-to-body massage. This ancient practice has its roots in numerous cultures throughout history. Body-to-body massage, also referred to as B2B massage, is a kind of massage that goes beyond the standard techniques. It is an intimate and sensual experience that involves the close connection in between the provider and receiver. Unlike other kinds of massage, B2B massage includes using numerous body parts, such as the arms, chest, and legs, to provide a more immersive and satisfying experience.
Body-to-body massage has been practiced for centuries in various parts of the world. Its origins can be traced back to ancient Asian cultures, such as India and China, where it was believed to enhance spiritual and physical wellness. In these ancient customs, body-to-body massage was considered a holistic approach to healing and relaxation. In India, body-to-body massage was called “abhyanga,” which suggests “caring hands.” It was a spiritual practice that was believed to balance the body’s energy and promote total wellness. In China, body-to-body massage became part of the Taoist custom and was utilized to promote the circulation of vital energy, known as “qi,” throughout the body. Throughout history, body-to-body massage has actually evolved and adapted to various cultures and societies. In some cultures, it was seen as a kind of art and charm, while in others, it was considered a therapeutic practice. Today, body-to-body massage is extensively recognized for its capability to supply both psychological and physical benefits. At its core, body-to-body massage includes the intimate connection in between the provider and receiver, developing a sense of trust and intimacy.
The provider utilizes their body to apply pressure and perform numerous massage techniques on the receiver’s body. During a body-to-body massage, the provider may use their arms to glide efficiently over the receiver’s back, offering a peaceful and calming experience. The chest might be utilized to use gentle pressure to particular locations, launching stress and promoting deep relaxation. The legs might be utilized to carry out extending motions, enhancing flexibility and increasing blood circulation. One of the crucial concepts of body-to-body massage is the focus on today minute. Both the giver and receiver are motivated to be fully present and conscious of their feelings and bodies. This mindfulness permits a much deeper connection and enhances the overall experience. Another important concept of body-to-body massage is interaction. The giver and receiver should honestly communicate their choices, boundaries, and any pain they might experience during the session. This guarantees that both parties are comfy and can fully take pleasure in the experience. Overall, body-to-body massage is an intimate and distinct practice that uses a variety of physical and psychological advantages.
The advantages of Thai massage may be really 21st century however they have their roots in ancient Eastern practices established over thousands of years. We invite you to come in and experience the magic of a Thai yoga Massage for yourself. Body-to-body massage, also known as B2B massage, is a sensuous and intimate type of massage that includes the use of not just hands, however the whole body to supply relaxation and enjoyment. Body-to-body massage, also known as B2B massage, is a kind of massage that goes beyond the conventional techniques. The provider utilizes their body to use pressure and perform numerous massage strategies on the receiver’s body.
Raquel Culver says:
Modern life and our eating practices can be demanding to our systems, and if we don’t act, these stressors can take a toll on our bodies and minds. So whether it’s an overload of chocolate from the Easter binge, your office chair makes your back beg for mercy, or another long day with the one in charge makes your head throb, standard Thai massage might be simply what you need. The advantages of Thai massage might be really 21st century however they have their roots in ancient Eastern practices developed over thousands of years. It’s all a long way from the experience you may have had of requirement, Westernised massage. Performed on a special Thai mat in loose-fitting clothes, a therapist extends your body through a series of techniques comparable to yoga applies and postures pressure to particular points along the energy lines of your body. Thai massage is excellent both physically and psychologically.
It can increase flexibility, enhance muscle tone, increase movement, release muscle stress, correct poor posture and fight stress. How? Well, conventional specialists think that by assisting energy to stream easily around the body once again they’re able to ease the symptoms of persistent discomfort and improve psychological wellbeing. A 2015 review of scientific trials found that every released study reports benefits in post-treatment pain reduction. Some research study concludes that standard Thai massage results in a reduction in discomfort of as much as 80% with the benefits kept for over 3 months at a time, consisting of enhancements in muscle stress, versatility and even anxiety. Findings published in the International Journal of Neuroscience recommend that massage therapy has favorable impacts on the hormonal agents and chemicals that regulate state of minds by decreasing cortisol and increasing both serotonin and dopamine. This effective triple action can help in reducing depression and promote happiness. Obviously, beyond the dry science, Thai yoga massage also simply feels actually, really nice. Guided by an experienced therapist, purposeful extending combined with well-established pressure methods helps soothes the muscles and enhance blood flow, leaving you relaxed and calm, ready to handle anything. Welcome to pain and stress management, Thai-style. We welcome you to come in and experience the magic of a Thai yoga Massage on your own. To reserve your Thai yoga massage at Castle Thai Spa, click here.
Body-to-body massage, also known as B2B massage, is a sensual and intimate kind of massage that includes the use of not simply hands, however the whole body to offer relaxation and enjoyment. In this post, we will explore the different elements of body-to-body massage, including its origins, methods, benefits, and security precautions. Whether you are a specialist or somebody thinking about experiencing this unique kind of massage, this post will offer you with valuable insights and details. Let’s begin by acquiring a much deeper understanding of body-to-body massage. This ancient practice has its roots in numerous cultures throughout history. Body-to-body massage, also referred to as B2B massage, is a kind of massage that goes beyond the standard techniques. It is an intimate and sensual experience that involves the close connection in between the provider and receiver. Unlike other kinds of massage, B2B massage includes using numerous body parts, such as the arms, chest, and legs, to provide a more immersive and satisfying experience.
Body-to-body massage has been practiced for centuries in various parts of the world. Its origins can be traced back to ancient Asian cultures, such as India and China, where it was believed to enhance spiritual and physical wellness. In these ancient customs, body-to-body massage was considered a holistic approach to healing and relaxation. In India, body-to-body massage was called “abhyanga,” which suggests “caring hands.” It was a spiritual practice that was believed to balance the body’s energy and promote total wellness. In China, body-to-body massage became part of the Taoist custom and was utilized to promote the circulation of vital energy, known as “qi,” throughout the body. Throughout history, body-to-body massage has actually evolved and adapted to various cultures and societies. In some cultures, it was seen as a kind of art and charm, while in others, it was considered a therapeutic practice. Today, body-to-body massage is extensively recognized for its capability to supply both psychological and physical benefits. At its core, body-to-body massage includes the intimate connection in between the provider and receiver, developing a sense of trust and intimacy.
The provider utilizes their body to apply pressure and perform numerous massage techniques on the receiver’s body. During a body-to-body massage, the provider may use their arms to glide efficiently over the receiver’s back, offering a peaceful and calming experience. The chest might be utilized to use gentle pressure to particular locations, launching stress and promoting deep relaxation. The legs might be utilized to carry out extending motions, enhancing flexibility and increasing blood circulation. One of the crucial concepts of body-to-body massage is the focus on today minute. Both the giver and receiver are motivated to be fully present and conscious of their feelings and bodies. This mindfulness permits a much deeper connection and enhances the overall experience. Another important concept of body-to-body massage is interaction. The giver and receiver should honestly communicate their choices, boundaries, and any pain they might experience during the session. This guarantees that both parties are comfy and can fully take pleasure in the experience. Overall, body-to-body massage is an intimate and distinct practice that uses a variety of physical and psychological advantages.
The advantages of Thai massage may be really 21st century however they have their roots in ancient Eastern practices established over thousands of years. We invite you to come in and experience the magic of a Thai yoga Massage for yourself. Body-to-body massage, also known as B2B massage, is a sensuous and intimate type of massage that includes the use of not just hands, however the whole body to supply relaxation and enjoyment. Body-to-body massage, also known as B2B massage, is a kind of massage that goes beyond the conventional techniques. The provider utilizes their body to use pressure and perform numerous massage strategies on the receiver’s body.
Gabriella Wylly says:
I think that is among the such a lot important info for me. And i am glad studying your article. But want to commentary on few general things, The web site taste is wonderful, the articles is in reality excellent : D. Just right task, cheers
https://foodandhealth.ru/simptomy/rvota says:
Amazing knowledge Kudos.
Renaldo Tedesco says:
HZ
Ismael Cherry says:
Hey this is kind of of off topic but I was wondering if blogs use WYSIWYG editors or if you have to manually code with HTML. I’m starting a blog soon but have no coding know-how so I wanted to get guidance from someone with experience. Any help would be greatly appreciated!
"http://www.ozsever.com.tr/component/k2/itemlist/user/432290" says:
Открой для себя безграничные возможности онлайн обучения! Представь себе: ты можешь получать знания, не выходя из дома, в любое удобное время и без лишних затрат на транспорт и учебные материалы. Это не просто обучение – это твой путь к успеху и личностному росту!
Онлайн обучение – это гибкость и удобство. Забудь про строгие расписания и долгие поездки. Учись тогда, когда тебе удобно, будь то ранним утром или поздней ночью. Всего несколько кликов – и ты уже на лекции или практическом занятии.
Неограниченный доступ к знаниям – вот что делает онлайн обучение уникальным. Тебе доступны курсы ведущих университетов и специалистов со всего мира. Лучшие преподаватели и эксперты готовы делиться своими знаниями и опытом. Ты можешь выбрать курс по любой интересующей тебя теме и начать учиться прямо сейчас.
Экономия времени и денег – еще один несомненный плюс. Забудь про дорогу в учебное заведение, затраты на проживание и питание. Все материалы и лекции доступны в цифровом формате, их можно пересматривать и перечитывать столько раз, сколько нужно.
Не забывай о комфортной и индивидуальной атмосфере обучения. Ты можешь учиться в своем темпе, задавать вопросы и получать ответы в любое время. Личное внимание и поддержка преподавателей помогут тебе усвоить материал лучше и быстрее.
Онлайн обучение – это твой билет в будущее. Начни прямо сейчас и открой для себя новые горизонты знаний и возможностей. Не упусти шанс стать лучше и успешнее с помощью современных технологий!
Here is my page: https://manualgo.arteriae.net/index.php/Online_Kurs_907488Q
"https://gmcguire.digital.uic.edu/mediawiki/index.php?title=Online_Kurs_342392J" says:
Открой для себя безграничные возможности онлайн обучения! Представь себе: ты можешь получать знания, не выходя из дома, в любое удобное время и без лишних затрат на транспорт и учебные материалы. Это не просто обучение – это твой путь к успеху и личностному росту!
Онлайн обучение – это гибкость и удобство. Забудь про строгие расписания и долгие поездки. Учись тогда, когда тебе удобно, будь то ранним утром или поздней ночью. Всего несколько кликов – и ты уже на лекции или практическом занятии.
Неограниченный доступ к знаниям – вот что делает онлайн обучение уникальным. Тебе доступны курсы ведущих университетов и специалистов со всего мира. Лучшие преподаватели и эксперты готовы делиться своими знаниями и опытом. Ты можешь выбрать курс по любой интересующей тебя теме и начать учиться прямо сейчас.
Экономия времени и денег – еще один несомненный плюс. Забудь про дорогу в учебное заведение, затраты на проживание и питание. Все материалы и лекции доступны в цифровом формате, их можно пересматривать и перечитывать столько раз, сколько нужно.
Не забывай о комфортной и индивидуальной атмосфере обучения. Ты можешь учиться в своем темпе, задавать вопросы и получать ответы в любое время. Личное внимание и поддержка преподавателей помогут тебе усвоить материал лучше и быстрее.
Онлайн обучение – это твой билет в будущее. Начни прямо сейчас и открой для себя новые горизонты знаний и возможностей. Не упусти шанс стать лучше и успешнее с помощью современных технологий!
Also visit my homepage :: https://fix.greenaryworld.com/index.php?qa=73746&qa_1=online-kurs-368025t
Isis Bushell says:
Excellent weblog here! Additionally your web site loads up very fast! What web host are you using? Can I am getting your associate link to your host? I desire my web site loaded up as fast as yours lol
슈어맨 says:
The USA Wrestling tattoo on his shoulder provides a pretty powerful indication of his fighting style, as does his streak of 3 straight bouts with at least four takedowns.
my web blog … https://welcometohimalayas.com/index.php/Explore_And_Master_Sports_Toto_Site
https://school1227.ru/ says:
Узнайте больше о школе 1227 Москвы на
официальном сайте https://school1227.ru/
온카 says:
Lovely facts. Appreciate it.
Have a look at my site :: https://edwin7v5o2.smblogsites.com/28654221/gambling-networks-a-hub-for-betting-aficionados
Lelia Beatty says:
Hurrah! After all I got a web site from where I can genuinely get helpful information regarding my study and knowledge.
Evie Hillier says:
I was curious if you ever considered changing the structure of your site? Its very well written; I love what youve got to say. But maybe you could a little more in the way of content so people could connect with it better. Youve got an awful lot of text for only having 1 or 2 images. Maybe you could space it out better?
Shonda Lizotte says:
I believe this is one of the such a lot significant information for me. And i am happy studying your article. However wanna observation on few normal issues, The website style is great, the articles is truly great : D. Just right task, cheers
Margarito Clancy says:
Hmm is anyone else experiencing problems with the images on this blog loading? I’m trying to determine if its a problem on my end or if it’s the blog. Any suggestions would be greatly appreciated.
Darin Collette says:
As the admin of this web page is working, no hesitation very rapidly it will be famous, due to its feature contents.
Elaine Synnot says:
Hi everyone, it’s my first pay a visit at this website, and paragraph is actually fruitful for me, keep up posting such articles.
Travis Jasper says:
I do trust all of the ideas you’ve introduced to your post. They’re very convincing and will definitely work. Nonetheless, the posts are too quick for starters. May you please prolong them a bit from next time? Thank you for the post.
Viola Skalski says:
Have you ever thought about creating an ebook or guest authoring on other blogs? I have a blog centered on the same information you discuss and would love to have you share some stories/information. I know my readers would appreciate your work. If you are even remotely interested, feel free to shoot me an e-mail.
Glinda Cowart says:
If you wish for to increase your know-how simply keep visiting this site and be updated with the hottest information posted here.
슈어맨시즌2 says:
You can play on a wide range of slots, like History, Classic, Space, Adventure, Egyptian, Roman, Safari, Greek, Music, Mythical, Fantasy, and more!
Feel free to visit my blog – https://qnabuddy.com/357177/ultimate-guide-to-sports-betting-site
Vince Heaton says:
Excellent post. I used to be checking constantly this weblog and I am inspired! Very useful information particularly the final part 🙂 I take care of such info a lot. I used to be seeking this particular information for a long time. Thanks and best of luck.
Yetta Butler says:
Just wish to say your article is as surprising. The clarity on your publish is just spectacular and that i can think you are a professional in this subject. Well together with your permission let me to snatch your RSS feed to stay updated with coming near near post. Thank you a million and please keep up the gratifying work.
Clemmie Wonggu says:
I’ve been browsing on-line more than 3 hours lately, but I never discovered any attention-grabbing article like yours. It is beautiful worth sufficient for me. In my opinion, if all site owners and bloggers made good content material as you probably did, the internet shall be a lot more useful than ever before.
Hildred Regalado says:
I visited several web sites except the audio quality for audio songs current at this web site is truly fabulous.
r7 casino says:
Казино r7
Казино R7 – это название, которое вызывает у игроков интерес и ожидания. Созданное для тех, кто ищет уникальный опыт в онлайн-гемблинге, оно предлагает широкий спектр игр и возможностей для выигрыша. Платформа сочетает в себе элементы инновационного дизайна и передовые технологии, что делает её привлекательной для игроков всех уровней.
Одним из главных преимуществ казино R7 является его продвинутая система безопасности, которая обеспечивает защиту личных данных и финансовых транзакций. Казино активно применяет современные криптографические методы, что помогает игрокам чувствовать себя в полной безопасности.
Здесь можно делать ставки на разнообразные игры, включая классические карточные и настольные игры, а также слот-машины с различными темами и бонусами. Казино R7 обещает своим пользователям не только развлечение, но и шанс на крупные выигрыши.
Обзор казино R7: Что нужно знать
Казино R7 представляет собой популярную игровую платформу, которая привлекает внимание своей разнообразной игрой и выгодными условиями. Ниже представлены ключевые моменты, которые следует учитывать при выборе этого казино.
Параметр|Описание
Лицензия|Казино R7 имеет лицензию от авторитетного игрового регулятора, что обеспечивает высокий уровень безопасности и честности игр.
Бонусы и акции|Платформа предлагает разнообразные бонусы, включая приветственные пакеты и регулярные акции для постоянных игроков.
Игровой ассортимент|В казино представлен широкий выбор игр, включая слоты, настольные игры и живое казино с участием реальных дилеров.
Методы оплаты
Поддержка клиентов|Пользователи могут обратиться в службу поддержки через чат, email или телефон для получения оперативной помощи.
Изучив вышеуказанные аспекты, вы сможете лучше понять, подходит ли казино R7 для ваших потребностей и предпочтений. Важно оценить все детали, чтобы сделать осознанный выбор и наслаждаться игрой с уверенностью.
История и развитие казино R7
Казино R7 начало свою деятельность в начале 2000-х годов, зарекомендовав себя как надежная и популярная платформа для онлайн-гемблинга. С момента своего основания, казино прошло через несколько этапов развития:
– Начальный этап (2000-2010): В этот период казино сосредоточилось на создании стабильной платформы и привлечении первых игроков. Была внедрена базовая система бонусов и акций.
– Расширение и обновление (2010-2015): В этот промежуток времени R7 значительно расширило свой ассортимент игр и улучшило интерфейс. Были добавлены новые слоты и настольные игры, а также улучшена мобильная версия.
– Укрепление позиций и инновации (2015-настоящее время): Казино R7 активно внедряет новые технологии, такие как криптовалютные транзакции и живые дилеры. Усилено внимание к безопасности и пользовательскому опыту.
В целом, развитие казино R7 можно описать как процесс постоянного совершенствования и адаптации к меняющимся требованиям рынка. Казино продолжает стремиться к достижению лидерских позиций в индустрии онлайн-гемблинга, предлагая своим пользователям лучший опыт игры.
Игровой ассортимент и слоты
Казино R7 предлагает широкий и разнообразный ассортимент игр, который удовлетворит требования как новичков, так и опытных игроков. В разделе слотов можно найти множество различных игр, каждая из которых обладает уникальными функциями и механиками.
Классические слоты включают в себя традиционные игры с 3 барабанами и простыми символами, такими как фрукты и BAR. Эти слоты идеально подходят для тех, кто предпочитает ностальгические элементы и простоту.
Современные видеослоты предлагают более сложные и захватывающие механики, включая 5 барабанов, различные линии выплат и бонусные раунды. В таких слотах часто используются разнообразные темы, от приключений и мифологии до футуристических и кинематографических сюжетов.
Прогрессивные джекпоты предоставляют шанс выиграть крупные денежные призы благодаря накоплению средств от ставок игроков по всему миру. Эти слоты имеют встроенные джекпоты, которые растут с каждой ставкой до тех пор, пока кто-то не выигрывает главный приз.
Каждая игра в казино R7 тщательно протестирована и сертифицирована, что гарантирует честность и прозрачность результатов.
Бонусные предложения и акции
Казино r7 предлагает своим пользователям разнообразные бонусные предложения и акции, которые делают игру более захватывающей и выгодной.
– Приветственный бонус: При регистрации и первом депозите игроки могут получить значительный бонус, который увеличивает их игровой баланс и предоставляет дополнительные средства для ставок.
– Бонусы на депозит: Казино регулярно проводит акции, предлагая бонусы на последующие депозиты. Эти бонусы могут включать дополнительные деньги или бесплатные вращения.
– Кэшбэк: В некоторых случаях казино возвращает часть проигранных средств в виде кэшбэка. Это помогает компенсировать потери и продолжить игру.
– Бонусы за лояльность: Постоянные игроки могут рассчитывать на бонусы и привилегии за активное участие в казино, такие как эксклюзивные предложения и персональные бонусы.
– Сезонные акции: Казино проводит специальные акции и турниры приуроченные к праздникам или другим значимым событиям, предоставляя игрокам уникальные возможности для выигрыша.
Подробности о текущих предложениях и условиях можно найти на официальном сайте казино r7. Не упустите шанс воспользоваться этими выгодными предложениями и повысить свои шансы на выигрыш!
Безопасность и лицензирование казино
Лицензирование также играет ключевую роль в обеспечении надежности казино. Казино R7 имеет официальную лицензию от авторитетного регулятора, что подтверждает его легальность и соблюдение стандартов безопасности. Лицензирование гарантирует, что игры на платформе проводятся честно, а все операции соответствуют законам.
Вместе эти меры создают надежную среду для игр, где пользователи могут сосредоточиться на удовольствии от процесса, зная, что их безопасность в надежных руках.
Опыт игроков и отзывы
Опыт игроков в казино R7 разнообразен и зависит от многих факторов, включая качество обслуживания, выбор игр и безопасность платформы. Многие пользователи отмечают, что интерфейс сайта интуитивно понятен, а игровое предложение охватывает широкий спектр интересов, от классических слотов до современных живых игр.
По отзывам, одним из главных достоинств казино R7 является надёжная система бонусов и акций, которые помогают увеличить шансы на выигрыш и делают игру более увлекательной. Игроки высоко оценивают различные программы лояльности и частые обновления бонусных предложений.
В общем, казино R7 получает положительные отзывы за разнообразие игр и привлекательные бонусные предложения, но есть и области, требующие доработки, особенно в части обслуживания клиентов и скорости финансовых транзакций.
Мобильная версия и приложения
Казино r7 предлагает удобный доступ к своим услугам через мобильные устройства, обеспечивая игрокам гибкость и комфорт в любом месте и в любое время. Мобильная версия сайта адаптирована для использования на различных экранах, от смартфонов до планшетов, обеспечивая гладкую навигацию и быструю загрузку страниц.
Для установки приложения необходимо посетить официальные магазины приложений или загрузить файл установки с сайта казино https://proficentr74.ru/. После установки приложения игроки могут получать уведомления о бонусах и акциях, а также использовать функции безопасности, такие как биометрическая аутентификация.
Corrine Hunley says:
That is a great tip particularly to those new to the blogosphere. Short but very precise info… Thanks for sharing this one. A must read article!
Meridith Farwell says:
Keep on working, great job!
Zachary Choi says:
I want to to thank you for this fantastic read!! I certainly enjoyed every bit of it. I have got you book marked to look at new things you post…
Instagram Followers Buy India says:
Outstanding post. I was motivated when I used to regularly read this blog! incredibly helpful data.
Buy Indian Followers
Sommer Helvey says:
Good day 🙂
What a good article!
May I scrape it and share it with my community subscribers?
My site is about Korean 야튜브
If you are interested, feel free to come to my site and have a look.
Thanks and Keep up the good work!
Gladis Houck says:
Hello, after reading this amazing paragraph i am too glad to share my knowledge here with colleagues.
Karl Tiffany says:
Рейтинг казино по уровню безопасности и защиты данных рейтинг казино
Marisol Mejia says:
My family members all the time say that I am wasting my time here at web, however I know I am getting know-how all the time by reading thes pleasant articles.
Danuta Lach says:
Hello, i read your blog from time to time and i own a similar one and i was just wondering if you get a lot of spam comments? If so how do you prevent it, any plugin or anything you can advise? I get so much lately it’s driving me crazy so any support is very much appreciated.
Gregory Carnegie says:
Ahaa, its pleasant conversation on the topic of this piece of writing at this place at this weblog, I have read all that, so now me also commenting here.
Hollie Hyam says:
Hi, just wanted to say, I enjoyed this blog post. It was inspiring. Keep on posting!
Millie Mckenney says:
Hello there I am so grateful I found your website, I really found you by mistake, while I was browsing on Google for something else, Anyways I am here now and would just like to say cheers for a marvelous post and a all round entertaining blog (I also love the theme/design), I don’t have time to read through it all at the moment but I have bookmarked it and also added in your RSS feeds, so when I have time I will be back to read a lot more, Please do keep up the superb work.
шоу каскадеров в москве сегодня says:
Приглашаем вас на захватывающее шоу каскадёров! В программе
https://suteam.ru/sportivnye-shou/cirkovoe-shou-v-moskve.html невероятные трюки, прыжки и акробатика. Опытные мастера своего дела продемонстрируют мастерство и смелость. Не упустите возможность стать свидетелем этого незабываемого зрелища! В нашем шоу участвуют только опытные и профессиональные каскадёры, которые готовы рисковать ради искусства. Это зрелище не оставит равнодушным ни одного зрителя!
Jacquelyn Deeter says:
Very energetic article, I enjoyed that a lot. Will there be a part 2?
рокс казино зеркало says:
Rox casino
Rox Casino стремительно завоевывает популярность среди любителей азартных игр благодаря своим разнообразным игровым предложениям и высококачественному сервису. Это заведение предлагает игрокам уникальную возможность насладиться как классическими, так и новыми слотами, живыми играми с настоящими крупье и множеством других развлечений.
Каждый посетитель Rox Casino может рассчитывать на привлекательные бонусы и акции, которые делают процесс игры еще более увлекательным и прибыльным. Например, щедрые приветственные бонусы и регулярные акции для постоянных клиентов создают отличные условия для игры и выигрыша.
Кроме того, Rox Casino предлагает удобный интерфейс и возможность играть как на ПК, так и на мобильных устройствах. Это позволяет каждому игроку находить время для любимых игр в любое удобное время. В нашем обзоре мы подробно рассмотрим все аспекты, которые делают Rox Casino идеальным местом для азартных игр.
Обзор возможностей Rox Casino
Rox Casino предлагает широкие возможности как для новичков, так и для опытных игроков. Платформа предоставляет доступ к большому количеству игровых автоматов, настольных игр и живого казино, что позволяет каждому найти развлечение по душе.
Игровые автоматы: В Rox Casino представлено более 1000 игр от ведущих разработчиков программного обеспечения. Здесь можно найти классические слоты, видео-слоты и игры с джекпотом. Частые новинки и эксклюзивные предложения делают игровое время увлекательным.
Настольные игры: Кроме слотов, https://autoshina54.ru/ предлагает разнообразие настольных игр, включая покер, блэкджек и рулетку. Множество вариантов и ставок позволяет игрокам выбирать наиболее привлекательные для них игры.
Живое казино: Для любителей настоящих эмоций, Rox Casino предлагает раздел с живыми дилерами. Здесь можно насладиться игрой в реальном времени, взаимодействуя с другими игроками и крупьё.
Бонусы и акции: Rox Casino радует своих пользователей щедрой бонусной политикой. Игроки могут рассчитывать на приветственные бонусы, фриспины и регулярные акции, что существенно увеличивает шансы на выигрыш.
Мобильная версия: Казино предоставляет удобный доступ к играм через мобильные устройства. Это позволяет игрокам наслаждаться любимыми играми в любое время и в любом месте.
Безопасность: Rox Casino уделяет большое внимание безопасности своих пользователей. Все данные защищены современными технологиями шифрования, что гарантирует надежность и безопасность финансовых операций.
В целом, Rox Casino предлагает приятный опыт игры с множеством возможностей для развлечения и выигрыша, при этом обеспечивая высокий уровень сервиса.
Уникальные предложения и акции для игроков
Кроме того, казино предлагает программу лояльности, где игроки могут накапливать баллы за активную игру и обменивать их на разнообразные призы, бонусы и даже реальные деньги. Это позволяет каждому клиенту чувствовать свою ценность и получать больше удовольствия от игры.
Периодически Rox casino запускает временные акции, приуроченные к праздникам или событиям, предоставляя игрокам шанс выиграть дополнительные бонусы и участвовать в розыгрышах ценных призов. Такие акции привлекают внимание и создают азарт среди пользователей.
Не менее интересна и система кэшбэка, которая позволяет игрокам получать часть своих проигрышей обратно. Это отличный способ минимизировать риски и продолжать наслаждаться любимыми играми даже в те дни, когда удача не на стороне.
Все эти предложения делают Rox casino привлекательным местом для игры, где каждый может найти что-то подходящее именно для себя и увеличить свои шансы на успех.
Yukiko Babb says:
Your style is so unique compared to other folks I’ve read stuff from. Thanks for posting when you have the opportunity, Guess I’ll just book mark this site.
Kim Keldie says:
It’s hard to find educated people in this particular subject, but you seem like you know what you’re talking about! Thanks
создание сайта продвижение в краснодаре says:
Для этого всего, нужно определиться с тематикой
сайта. Это во многом предопределит как набор
инструментов, с помощью которых будет создаваться Ваш сайт, так
и его внешний вид. Относительно программной части, можно сказать, что лучше всего обращаться за услугами
профессиональных веб мастеров, создание и раскрутка сайтов
– это достаточно сложный процесс, в котором требуется уделять внимание множеству нюансов.
Florine Llewelyn says:
Awesome post.
Norris Gilyard says:
Fantastic beat ! I would like to apprentice even as you amend your website, how can i subscribe for a blog site? The account helped me a appropriate deal. I were a little bit familiar of this your broadcast offered bright transparent idea
1xbet ставка промокод при регистрации says:
1xbet промокод 2024 представляет собой уникальный код, который позволяет получить дополнительные бонусы и льготы от букмекерской компании 1xbet. Этот промокод является актуальным в 2024 году и предоставляет возможность получить дополнительные средства на свой счет. Для использования 1xbet промокода 2024 необходимо зарегистрироваться на сайте букмекера и ввести данный код в соответствующем поле при регистрации. После этого на ваш счет будут начислены дополнительные средства, которые можно использовать для ставок на спорт, казино или другие развлечения. 1xbet является одной из самых популярных букмекерских компаний в России и предлагает широкий выбор спортивных событий для ставок. Кроме того, у нее есть мобильное приложение, которое позволяет делать ставки в любое время и в любом месте. Если вы хотите получить дополнительные бонусы и льготы от 1xbet, не забудьте использовать промокод 2024 при регистрации. Это поможет вам увеличить свои шансы на выигрыш и получить еще больше удовольствия от игры.
http://xn--bf0bzn517bbte8mq.kr/bbs/board.php?bo_table=free&wr_id=199114
buy GBL in Belgium says:
Has anyone know a site to purchase y-Butyrolactoneon the internet? I’ve been searching a trusted vendor, but it’s hard to determine which to trust. I’m in need of 99% pure GBL with fast shipping and secure payment options. Preferably they offer credit card options, and can send to the United States or globally. If anyone has ordered https://progbl.com/home/26-gbl-250-ml.html recently, I’d be grateful for any recommendations on which site to order it securely. Thanks in advance.
Giselle Using says:
Thanks for every other magnificent post. The place else could anyone get that type of information in such an ideal method of writing? I have a presentation next week, and I am on the search for such info.
Kareem Geary says:
I visited various sites however the audio feature for audio songs present at this web page is truly marvelous.
Christoper Lemos says:
Hey there! Do you know if they make any plugins to protect against hackers? I’m kinda paranoid about losing everything I’ve worked hard on. Any recommendations?
텐카페알바 says:
So yes, Google is coming out with a function for looking for jobs.
Feel free to visit my website :: http://feedhispeople.org/__media__/js/netsoltrademark.php?d=find40.bloggerswise.com%2F35269009%2Fthe-leading-part-time-positions-for-ladies-start-at-ezalba-com
credly.com says:
Over the past decade, the realm of online gambling has seen a significant boom, with countries across the globe embracing this innovative gaming experience. The Philippines has emerged as a significant force in this burgeoning industry, offering a diverse range of online casino venues to both domestic and foreign players. Among this thriving ecosystem, Panaloko Online Casino has made a name for itself as a top-tier platform for players desiring a superior online gambling experience.
Throughout this in-depth exploration, we will delve into the diverse elements that render Panaloko a standout choice for casino enthusiasts in the Philippines and beyond. From its extensive gaming library to its innovative safety protocols, we’ll explore why Panaloko Casino has become a well-known brand in the Filipino online gambling scene.
The Growth of Online Casinos in the Philippines
Prior to exploring the details of Panaloko Online Casino, it’s important to comprehend the backdrop of online gambling in the Philippines. The nation has a diverse and multifaceted background with wagering, dating back to pre-colonial times. Nevertheless, it wasn’t until the 1970s and 1980s that modern casino gaming commenced operations in the region.
The arrival of digital platforms brought about a new era for gambling in the Philippines. Several years ago, the country’s gaming regulator (PAGCOR) established the POGO (POGO) regulatory framework, which allowed online casinos to legally operate within the nation.
This move paved the way for domestic and foreign companies to access the virtual casino sector of the country. As a result, the market has witnessed significant development, with numerous online casinos contending for player attention.
Introducing Panaloko Online Casino
Amidst this competitive landscape, Panaloko Online Casino has surfaced as a leading force. Founded in the past decade, Panaloko Casino has swiftly earned a reputation for its devotion to offering a top-notch online gambling journey tailored to the inclinations of Pinoy gamblers.
The brand “Panaloko” alone bears importance in Philippine traditions. Derived from the native term “panalo,” which means “win” or “victory,” Panaloko represents the spirit of triumph that numerous gamblers pursue in their online gaming endeavors.
Gaming Library
A crucial aspect that differentiates panaloko (https://www.credly.com/users/panaloko-casino/badges) apart from its competitors is its extensive selection of gaming options. The website showcases a varied portfolio of games tailored to meet the tastes of various gambling enthusiasts, from novice gamblers to veteran players.
One-Armed Bandits
Panaloko’s slot machine selection is truly outstanding. With hundreds of games accessible, players can experience a range spanning nostalgic one-armed bandits to cutting-edge feature-rich titles offering captivating graphics and thrilling special rounds.
Highly sought-after slot options on Panaloko Online Casino comprise:
Millionaire Maker
Cosmic Fortune
Book of Dead
Gonzo’s Quest
Eternal Love
These options provide varying levels of excitement and possible rewards, guaranteeing that options exist for every type of player.
Table Games
For those who prefer more traditional casino experiences, Panaloko presents a comprehensive selection of table games. Among these are:
Blackjack: Various versions of this timeless gambling activity are accessible, including European Blackjack, Double Exposure Blackjack.
The Devil’s Game: Players can try their luck at various versions of roulette, each offering different odds and payouts.
Baccarat: This sophisticated card game, favored by luxury gamblers, is present in different styles.
Texas Hold’em: Numerous poker variants are on offer, including Three Card Poker, Let It Ride.
Bones: This exciting dice game offers players the chance to experience the thrill of a betting venue from the comfort of their own residences.
Real-Time Casino Action
A standout offering of Panaloko is its interactive casino section. This option combines the accessibility of online gambling with the realism of a brick-and-mortar casino.
Users can engage with trained croupiers in instantaneous using cutting-edge broadcasting systems. This produces an immersive environment that faithfully reproduces the ambiance of gambling in a traditional gambling venue.
In-demand live dealer titles on Panaloko feature:
Interactive Vingt-et-Un
Real-Time Wheel of Fortune
Interactive Chemin de Fer
Live Poker
Live Game Shows: Including Deal or No Deal Live
User Experience
Panaloko Online Casino puts a strong emphasis on providing an superior website navigation. The platform is crafted with ease of use in mind, permitting users to seamlessly access their preferred titles and browse the multiple areas of the website.
The layout is sleek and user-friendly, with clear categories for distinct betting categories. An advanced filtering system enables players to easily find desired options or explore new ones based on personal tastes.
Furthermore, Panaloko Online Casino has invested heavily in ensuring that its online casino is entirely flexible, providing a seamless experience across various devices, such as personal PCs, smartphones, and tablets.
On-the-Go Gambling
Understanding the increasing popularity of portable betting, Panaloko Online Casino has developed a advanced portable gaming solution that allows players to enjoy
Glenn Leworthy says:
I truly love your blog.. Pleasant colors & theme. Did you build this site yourself? Please reply back as I’m wanting to create my own website and would love to learn where you got this from or what the theme is called. Many thanks!
Essie Stringer says:
I every time used to read article in news papers but now as I am a user of web therefore from now I am using net for content, thanks to web.
cncsolesurvivor.com says:
Appreciate it! Numerous posts.
мелбет игровые автоматы says:
You actually reported that fantastically.
Candra McElhaney says:
There’s certainly a great deal to know about this topic. I really like all of the points you made.
Monte Prinsep says:
This is very interesting, You are a very skilled blogger. I have joined your feed and look forward to in search of extra of your fantastic post. Additionally, I’ve shared your website in my social networks
Hung Poindexter says:
Аренда катера Владивосток
. Сервис онлайн бронирования доступны по всему миру. Аренда морского и речного транспорта,. Лодки, яхты, катера от бюджетного до продвинутого класса. Сайт arendakatera.pro”
Морские прогулки. Большой выбор морских прогулок. Уникальные маршруты. Наш Сайт Аренда яхт
скидки 10 процентов по промокоду KdlBrv9-6t оращайтесь мы работаем 24\7
Starla Mackersey says:
“body-safe” Sex Toys: What To Find Out About Jelly, Silicone, And So On Silicone-based lubricants can deteriorate silicone toys, so water-based or hybrid lubricants are typically recommended.
cheap sex toys
male sex toys
dildos
dildo
animal dildo
dildos
wholesale dildo
g spot vibrator
g spot vibrator
adult store
dildos
dildos
vibrators
dildos
gay sex toys
strap on
vibrator
vibrators
male sex toys
penis pump
dildo
horse dildo
penis pump
wholesale vibrator
vibrator
Willy Wetherspoon says:
I love your blog.. very nice colors & theme. Did you design this website yourself or did you hire someone to do it for you? Plz reply as I’m looking to construct my own blog and would like to find out where u got this from. kudos
Pummy says:
It’s actually a nice and helpful piece of information. I am glad that you shared this helpful information with us.
Please stay us informed like this. Thank you for sharing.
파워볼 says:
You actually mentioned this superbly!
My blog :: https://heeeyholding.sitey.me/s/cdn/?https://trole.us/eos%ED%8C%8C%EC%9B%8C%EB%B3%BC-%EA%B2%B0%EA%B3%BC%EC%99%80-%EA%B2%8C%EC%9E%84%EB%AA%AC-%EC%A0%95%EB%B3%B4/
Karolyn Stillings says:
Can I just say what a comfort to uncover someone that really knows what they are talking about over the internet. You definitely realize how to bring a problem to light and make it important. More people need to look at this and understand this side of your story. It’s surprising you aren’t more popular because you most certainly possess the gift.
Jessika Dacre says:
Ridiculous quest there. What occurred after? Take care!
linkedin job Search says:
Whilst holding a position of trust, in reality he was a serial sex offender.
Also visit my homepage … https://www.jtayl.me/jobsearchengines605828
Jacquetta Sadleir says:
Appreciating the time and effort you put into your blog and detailed information you offer. It’s great to come across a blog every once in a while that isn’t the same old rehashed material. Excellent read! I’ve saved your site and I’m adding your RSS feeds to my Google account.
Siga no Instagram says:
I’m gone to say to my little brother, that he should also pay a visit this
web site on regular basis to take updated from latest gossip.
Maude Bloom says:
Oh my goodness! Incredible article dude! Thank you, However I am encountering issues with your RSS. I don’t know why I cannot join it. Is there anybody getting the same RSS issues? Anyone who knows the solution can you kindly respond? Thanks!!
게임몬 says:
With thanks. Helpful information.
Feel free to surf to my web blog: https://www.redly.vip/307751
Loren Snyder says:
I am in fact thankful to the holder of this web page who has shared this impressive paragraph at at this time.
www.granit-st.ru says:
Kudos. Very good information!
Powerball Jackpot says:
Subsequent, bring your ticket to the relevant lottery authority to claim your winnings.
Also visit my blog … http://patientleadgeneration.com/__media__/js/netsoltrademark.php?d=csv.cx%2F4j8vt
Go to BagnallHaus.Com says:
Glad to be one of many visitants on this awe inspiring website :D.
My web page … https://Ck2.it/uppereastcoastcondotours901660
https://chicago.eater.com says:
You revealed that fantastically!
booi casino промокод says:
Казино буй зеркало
Современные увлечения требуют гибкости и удобства. Теперь каждый желающий может наслаждаться азартом, не выходя из дома. Открываются новые горизонты для миллионов пользователей. Виртуальные площадки предоставляют шанс испытать удачу и получить ценные призы. Именно такие ресурсы приводят к новому этапу в индустрии развлечений.
В мире высоких технологий важность доступа к разнообразным играм сложно переоценить. Каждый игрок стремится найти оптимальные условия для участия в азартных играх. Платформы меняются, как меняется мода, и чтобы оставаться в центре событий, нужно быть в курсе актуальных источников. Это открывает перед пользователями множество возможностей, включая различные варианты платформ и интересные акции.
Необходимо учитывать разнообразие предложений и факторы, способные повлиять на выбор. Одним из ключевых моментов является доступность и простота входа на подобные площадки. Особенно важным является наличие альтернатив для тех, кто сталкивается с ограничениями. Учитывая все вышесказанное, пользователи способны находить для себя идеальные условия для игры, позволяющие не только развлекаться, но и открывать новые горизонты в мире возможностей.
Преимущества игры на альтернативных ресурсах
Пользование подобными ресурсами имеет свои интересные аспекты. Во-первых, на них часто предлагаются уникальные бонусы, что делает процесс игры более увлекательным. Во-вторых, игроки могут избежать некоторых ограничений, вроде географических запретов. Это открывает новые возможности для пользователей со всего мира.
– Широкий выбор игр и развлечений.
– Улучшенные условия для новичков и постоянных клиентов.
– Доступ к эксклюзивным акциям и предложениям.
– Удобные возможности для мобильной игры.
Несмотря на разные аспекты, общая тенденция остается положительной – игроки готовы к экспериментам и ищут новые ощущения. Благодаря обилию доступных вариантов, экспериментировать с играми становится проще, а значит, каждый может найти то, что ему по вкусу. Разнообразие форматов позволяет каждому игроку понять, что ему нравится больше всего. Интерес к играм разных жанров, возможности для стратегий и шансов на выигрыш делают процесс ещё более захватывающим.
Подводя итоги, стоит отметить, что использование альтернативных платформ предоставляет значительные преимущества, которые не стоит недооценивать. Эти возможности позволяют не только улучшить личный опыт, но и сделать так, чтобы каждый смог найти развлечение по душе, преодолевая барьеры, которые могут встать на его пути.
Преимущества игры на альтернативных платформах
Игроки часто сталкиваются с необходимостью искать доступные игровые площадки. Это связано с блокировками, которые могут возникать по разным причинам. Поэтому альтернативные сайты становятся очень популярными. Они обеспечивают возможность продолжать наслаждаться любимыми развлечениями без остановок.
Главным преимуществом таких площадок является их доступность. Пользователи могут легко получить к ним доступ с любого устройства. Эти платформы также предлагают разнообразие игр от известных разработчиков. Каждый игрок найдет что-то по своему вкусу.
Кроме того, они часто предлагают специальные бонусы и акции, чтобы привлечь новых пользователей. Например, это могут быть увеличенные приветственные пакеты или поощрения за лояльность. Такие предложения создают дополнительные возможности для выигрышей.
Следует отметить, что альтернативные ресурсы обеспечивают высокий уровень безопасности. Шифрование данных и защита личной информации играют важную роль в доверии игроков. Они могут быть уверены, что их средства в безопасности, что, безусловно, играет большую роль в выборе платформы.
И в завершение, альтернативные платформы предлагают комфортную мобильную версию, позволяя играть в любое время и в любом месте. Игроки могут наслаждаться процессом, не завися от стационарного компьютера, что делает их опыт еще более увлекательным и гибким. Так, обеспечивая доступ к разнообразным играм, подобные ресурсы открывают перед пользователями новые горизонты удовольствия и возможностей выигрышей.
Feel free to surf to my webpage https://cficom.ru/pic/pgs/promokodu_buy_kazino.html
https://casino3vavada.ru says:
Vavada вход казино
Каждый человек, интересующийся азартными играми, мечтает о незабываемом опыте. Это может быть фантастическая возможность испытать удачу, получить невероятные эмоции или просто расслабиться в приятной атмосфере. Игровые платформы предлагают своим пользователям множество развлечений, которые привлекают с каждым днем все большее количество поклонников. Но как же легко и быстро попасть в эту захватывающую вселенную?
Открытие дверей в новый мир должно быть простым и интуитивным. Многие платформы создают удобные интерфейсы, позволяющие пользователям в считанные минуты справиться с процессом. Непрерывный поток новых игр и акций требует мгновенного отклика, ведь каждый жаждет воспользоваться уникальными предложениями. Важно помнить, что запуск сессии становится лишь первым шагом на пути к увлекательным приключениям.
Ключевым моментом является процесс подключения, который должен быть максимально безопасным и простым, чтобы никто не чувствовал себя потерянным. Особенно важно понимать, как правильно настроить аккаунт и иметь доступ к личным данным, не испытывая при этом дискомфорта. Кроме того, неопытные игроки могут столкнуться с различными вопросами, касающимися правил, условий и способов пополнения баланса.
Поэтому важно заранее ознакомиться с правилами и рекомендациями, чтобы получать только положительные эмоции от каждой игры. В этой статье мы шаг за шагом рассмотрим все ключевые аспекты, позволяющие избежать трудностей на пути к захватывающему отдыху и сделать процесс непринужденным и приятным. Нам предстоит изучить, как оптимально максимально раскрепоститься и получать удовольствие от игры, не задумываясь о сложностях.
Авторизация на платформе: шаг за шагом
Во-первых, запустите платформу на своём устройстве. Это может быть смартфон, планшет или компьютер. После загрузки вы увидите главный экран, на котором располагаются различные разделы. Вам нужно найти кнопку авторизации и нажать на неё. Это общее место, где пользователи могут вводить свои данные.
На следующем этапе вам будет предложено ввести информацию для входа в свой профиль. Обычно потребуется указать свои логин и пароль. Убедитесь, что информация введена верно, без опечаток. В случае ошибки система не позволит вам войти в аккаунт.
Стоит заметить, что если вы забыли пароль, есть специальная функция для его восстановления. В таком случае следуйте инструкциям, которые будут отображены на экране. Это обеспечит вам возможность продолжить использовать все сервисы без дополнительных трудностей. Иногда стоит проверить папку со спамом, если не приходит письмо с новым паролем.
– 1. Запустите платформу.
– 2. Найдите кнопку для авторизации.
– 3. Введите свои логин и пароль.
– 4. Если необходимо, восстановите пароль.
После введения данных, которые подтверждают вашу личность, следует подтвердить их. Нажмите на соответствующую кнопку, чтобы завершить процесс входа. Если у вас нет никакого аккаунта, существует возможность пройти регистрацию, о которой мы поговорим в следующем разделе. Помните, что поддержание безопасности ваших данных является одним из важнейших аспектов. После успешной авторизации вы получите доступ ко всем функциям вашего профиля и будете в состоянии наслаждаться азартными играми.
Как пройти авторизацию на платформе
Для авторизации требуется ввод определенной информации. Обычно это логин и пароль. Чаще всего, эти данные вы выбираете при регистрации. Некоторые платформы предлагают возможность запоминания учетных данных для облегчения доступа в будущем. На уровне системы также предусмотрены меры безопасности, чтобы защитить ваш аккаунт.
Шаги авторизации|Описание
1. Перейти на страницу входа|Откройте браузер и введите URL платформы.
2. Ввести логин|Введите уникальное имя пользователя, которое вы создали ранее.
3. Ввести пароль|Введите секретный код, который обеспечивает вашу безопасность.
4. Нажать кнопку “Войти”|Подтвердите введенные данные, нажав на соответствующую кнопку.
Таким образом, правильно пройдя все этапы, вы обеспечите себе беспрепятственный доступ к нужной информации и функциям. Каждый шаг имеет свое значение, и стоит к нему отнестись внимательно. Помните, всегда можно обратиться в службу поддержки, если возникнут трудности. Ничто так не помогает, как квалифицированная помощь, если возникают какие-либо вопросы.
Also visit my blog post – скачать официальный сайт вавада (https://casino3vavada.ru)
Flor Schreiner says:
Hi there, I enjoy reading all of your article. I wanted to write a little comment to support you.
children's name brand clothing says:
Interesting blog! Is your theme custom made or did you download it from somewhere? A theme like yours with a few simple adjustements would really make my blog shine. Please let me know where you got your theme. Cheers
Check out my web page :: http://adcllc.org/2016/06/29/new-site-test/2024/08/06/learning-sport-with-used-golf-equipment/
Lucinda Hollway says:
Magnificent items from you, man. I have be mindful your stuff prior to and you’re just extremely wonderful. I really like what you’ve acquired right here, certainly like what you’re saying and the way in which by which you are saying it. You’re making it entertaining and you continue to take care of to stay it sensible. I can not wait to read much more from you. That is actually a tremendous website.
Jannette Beyers says:
What’s up to all, how is the whole thing, I think every one is getting more from this web page, and your views are nice in favor of new visitors.
Kristen Mack says:
Perfect work you have done, this internet site is really cool with good info. k
tj
j
k
4e3b
lke
h4sd
4j
sg
sg
j
j
j
45ds
hs4
tj
sdg
d54j
jh
hs4
rh
dtj
dt
rh
we4
45ds
jh
hew
hew
h
sreh
tyu
we4
ty
k
etki
h
jh
w
j
ytkj
tj
4e3b
45ds
sg
sreh
sdg
4j
w
45ds
4sdj
dt
sg
4e3b
ytkj
jh
nhd5
dt
k
tj
4eyr
hs4
ytkj
dt
ghw
ty
sg
rh
ty
jh
dt
lke
8olk
dt
jh
sdg
d54j
j
4j
lke
4sdj
tj
dt
sg
h
h4sd
j
h4sd
4e3b
dtj
4sdj
rh
lke
4sdj
ty
tyu
dt
dt
tj
h4sd
45ds
4sdj
tj
tj
sg
lke
dt
h
h4sd
jh
8olk
rh
4sdj
h
d54j
j
4j
we4
we4
sg
nhd5
s
we4
4eyr
sdg
j
4eyr
tyu
d54j
j
dt
h4sd
s
nhd5
4e3b
4e3b
sg
tj
h4sd
w
4e3b
ytkj
j
h
dtj
sg
s
sdg
s
rh
w
nhd5
dt
tj
j
dtj
45ds
hs4
dt
k
hew
h4sd
j
h4sd
4e3b
hs4
jh
4j
45ds
nhd5
s
dt
dtj
j
rh
w
d54j
dt
hew
jh
ghw
j
hew
h
ytkj
ytkj
k
s
dt
etki
4sdj
s
45ds
h
we4
45ds
dt
4sdj
sg
4eyr
k
s
j
nhd5
8olk
tj
etki
tyu
sg
hew
4eyr
we4
4e3b
hew
hew
h4sd
sreh
8olk
w
8olk
sdg
4sdj
4eyr
8olk
h
ytkj
ytkj
jh
ty
dt
4sdj
4e3b
ytkj
4sdj
8olk
j
4e3b
sreh
jh
dt
s
j
s
sg
ghw
45ds
j
hew
4sdj
jh
we4
d54j
dt
dt
k
4eyr
dt
dt
sg
sg
h
45ds
rh
jh
hs4
ty
45ds
j
h
sreh
hs4
8olk
ghw
sg
tj
d54j
s
s
dt
ty
j
ytkj
4eyr
4e3b
4j
k
8olk
ty
d54j
45ds
dt
sdg
rh
sg
h
w
dtj
sg
jh
ty
k
j
ghw
45ds
4sdj
jh
lke
8olk
lke
dt
jh
j
tyu
ty
j
dt
tj
h4sd
j
hs4
ty
h4sd
8olk
sg
j
jh
j
etki
dt
8olk
8olk
d54j
tyu
h
h
45ds
jh
45ds
lke
hs4
nhd5
hs4
jh
ytkj
etki
sdg
4e3b
offerta Diretta casino senza deposito says:
Hmm it appears like your website ate my first comment (it was extremely long) so I guess I’ll just sum it up what I had written and say, I’m thoroughly enjoying your blog. I too am an aspiring blog blogger but I’m still new to everything. Do you have any suggestions for beginner blog writers? I’d certainly appreciate it.
Here is my homepage … http://https//forum.Mtgcardmaker.com%2Ftopic%2F127928-just-wanted-to-say-hi%2F/
Stella Calabrese says:
I am really impressed with your writing skills as well as with the layout on your weblog. Is this a paid theme or did you customize it yourself? Anyway keep up the excellent quality writing, it is rare to see a great blog like this one these days.
Violet Vallery says:
I am regular reader, how are you everybody? This piece of writing posted at this site is really pleasant.
Alberta Simoi says:
This is the perfect web site for anyone who would like to understand this topic. You know so much its almost hard to argue with you (not that I actually would want to…HaHa). You definitely put a new spin on a subject that has been written about for decades. Wonderful stuff, just excellent!
"https://magicthearchiving.com/wiki/User:Landon6929" says:
Vavada Casino pruža vrhunsko iskustvo online kockanja za sve ljubitelje igara na sreću. Sa modernim dizajnom i širokim spektrom igara, ovaj kazino je savršeno mjesto za one koji traže zabavu i šansu za osvajanje velikih dobitaka.
Jedna od glavnih prednosti Vavada Casina je ogromna ponuda slot igara, uključujući popularne naslove od vodećih provajdera kao što su NetEnt, Microgaming i Yggdrasil. Igrači mogu birati između klasičnih slotova, video slotova, kao i igara sa progresivnim jackpotom. Pored slotova, Vavada nudi i širok izbor stolnih igara kao što su blackjack, rulet i poker, kako bi zadovoljili sve ukuse.
Registracija na Vavada Casino je brza i jednostavna, a novi igrači mogu iskoristiti atraktivne bonuse dobrodošlice i redovne promocije. Platforma je prilagođena korisnicima i dostupna na različitim uređajima, što omogućava igračima da uživaju u omiljenim igrama bilo gdje i bilo kada.
Za sigurnost i pouzdanost, Vavada Casino koristi najnovije tehnologije šifrovanja, čime osigurava privatnost i zaštitu podataka igrača. Brze isplate i različite metode plaćanja omogućavaju bezbrižno uživanje u igri, bez nepotrebnih komplikacija.
Pridružite se Vavada Casinu već danas i otkrijte zašto je ovo jedan od najboljih online kazina na tržištu!
https://yogicentral.science/wiki/Vavada_Casino_7074y
"http://www.letts.org/wiki/User:MarlonBarreto" says:
1win е водеща платформа за онлайн залози в България, предоставяща на потребителите уникално изживяване с богат набор от спортни събития, казино игри и бонуси. Създаден специално за българските играчи, сайтът предлага лесен достъп до различни пазари за залагания, включително футбол, тенис, баскетбол, eSports и много други.
### Какво прави 1win предпочитан избор?
1win се отличава с интуитивен интерфейс, който прави навигацията лесна дори за начинаещите потребители. Независимо дали сте фен на спортни залози или обичате казино игри, платформата предлага високо ниво на сигурност и разнообразие от възможности за забавление.
### Бонуси и промоции
1win привлича вниманието със своите щедри бонуси. Новите потребители могат да се възползват от бонус за първи депозит, който значително увеличава техните средства за залагане. Освен това, сайтът редовно предлага различни промоции и бонус кодове, които дават допълнителни награди и стимули.
### Казино игри на 1win
Казино секцията на 1win предлага стотици слотове, рулетка, блекджек и бакара, като игрите са разработени от водещи софтуерни доставчици. Любителите на казиното могат да се насладят на разнообразие от заглавия с реалистична графика и вълнуващи джакпоти.
### Спортни залози на живо
1win предлага възможност за залози на живо, което прави играта още по-интерактивна. Потребителите могат да залагат в реално време на любимите си спортове и да следят динамиката на резултатите директно на сайта. Възможността за бързо уреждане на залози и актуализация на коефициентите допълнително засилва удоволствието от играта.
### Мобилно приложение
За потребителите, които обичат да залагат в движение, 1win предлага мобилно приложение, достъпно за Android и iOS. Приложението е бързо и лесно за употреба, като предоставя същите функции и удобства като десктоп версията на сайта.
### Безопасност и надеждност
1win се грижи за сигурността на личните данни и финансовите операции на своите потребители. Сайтът използва модерни технологии за криптиране и предоставя няколко метода за депозити и тегления, включително банкови карти, електронни портфейли и криптовалути.
### Регистрация и поддръжка
Процесът на регистрация в 1win е бърз и лесен, а екипът по поддръжка е винаги готов да помогне на потребителите при възникнали въпроси или проблеми. Клиентите могат да се свържат с поддръжката чрез чат на живо или имейл по всяко време на денонощието.
С 1win ще откриете един нов свят на забавление и възможности за печалба. Регистрирайте се днес и се възползвайте от всички предимства, които платформата предлага!
http://classicalmusicmp3freedownload.com/ja/index.php?title=%E5%88%A9%E7%94%A8%E8%80%85:MaryannCaesar
"https://noteswiki.net/index.php?title=Benutzer:SuzannaI54" says:
Vavada Casino pruža vrhunsko iskustvo online kockanja za sve ljubitelje igara na sreću. Sa modernim dizajnom i širokim spektrom igara, ovaj kazino je savršeno mjesto za one koji traže zabavu i šansu za osvajanje velikih dobitaka.
Jedna od glavnih prednosti Vavada Casina je ogromna ponuda slot igara, uključujući popularne naslove od vodećih provajdera kao što su NetEnt, Microgaming i Yggdrasil. Igrači mogu birati između klasičnih slotova, video slotova, kao i igara sa progresivnim jackpotom. Pored slotova, Vavada nudi i širok izbor stolnih igara kao što su blackjack, rulet i poker, kako bi zadovoljili sve ukuse.
Registracija na Vavada Casino je brza i jednostavna, a novi igrači mogu iskoristiti atraktivne bonuse dobrodošlice i redovne promocije. Platforma je prilagođena korisnicima i dostupna na različitim uređajima, što omogućava igračima da uživaju u omiljenim igrama bilo gdje i bilo kada.
Za sigurnost i pouzdanost, Vavada Casino koristi najnovije tehnologije šifrovanja, čime osigurava privatnost i zaštitu podataka igrača. Brze isplate i različite metode plaćanja omogućavaju bezbrižno uživanje u igri, bez nepotrebnih komplikacija.
Pridružite se Vavada Casinu već danas i otkrijte zašto je ovo jedan od najboljih online kazina na tržištu!
https://www.faq.sectionsanywhere.com/584/vavada-casino-2674w
"https://wiki.openwater.health/index.php/1win_Bg_6002x" says:
1win е водеща платформа за онлайн залози в България, предоставяща на потребителите уникално изживяване с богат набор от спортни събития, казино игри и бонуси. Създаден специално за българските играчи, сайтът предлага лесен достъп до различни пазари за залагания, включително футбол, тенис, баскетбол, eSports и много други.
### Какво прави 1win предпочитан избор?
1win се отличава с интуитивен интерфейс, който прави навигацията лесна дори за начинаещите потребители. Независимо дали сте фен на спортни залози или обичате казино игри, платформата предлага високо ниво на сигурност и разнообразие от възможности за забавление.
### Бонуси и промоции
1win привлича вниманието със своите щедри бонуси. Новите потребители могат да се възползват от бонус за първи депозит, който значително увеличава техните средства за залагане. Освен това, сайтът редовно предлага различни промоции и бонус кодове, които дават допълнителни награди и стимули.
### Казино игри на 1win
Казино секцията на 1win предлага стотици слотове, рулетка, блекджек и бакара, като игрите са разработени от водещи софтуерни доставчици. Любителите на казиното могат да се насладят на разнообразие от заглавия с реалистична графика и вълнуващи джакпоти.
### Спортни залози на живо
1win предлага възможност за залози на живо, което прави играта още по-интерактивна. Потребителите могат да залагат в реално време на любимите си спортове и да следят динамиката на резултатите директно на сайта. Възможността за бързо уреждане на залози и актуализация на коефициентите допълнително засилва удоволствието от играта.
### Мобилно приложение
За потребителите, които обичат да залагат в движение, 1win предлага мобилно приложение, достъпно за Android и iOS. Приложението е бързо и лесно за употреба, като предоставя същите функции и удобства като десктоп версията на сайта.
### Безопасност и надеждност
1win се грижи за сигурността на личните данни и финансовите операции на своите потребители. Сайтът използва модерни технологии за криптиране и предоставя няколко метода за депозити и тегления, включително банкови карти, електронни портфейли и криптовалути.
### Регистрация и поддръжка
Процесът на регистрация в 1win е бърз и лесен, а екипът по поддръжка е винаги готов да помогне на потребителите при възникнали въпроси или проблеми. Клиентите могат да се свържат с поддръжката чрез чат на живо или имейл по всяко време на денонощието.
С 1win ще откриете един нов свят на забавление и възможности за печалба. Регистрирайте се днес и се възползвайте от всички предимства, които платформата предлага!
https://magicthearchiving.com/wiki/1win_Bg_4386E
"https://whatawiki.com:443/index.php/1win_Bg_6233X" says:
1win е водеща платформа за онлайн залози в България, предоставяща на потребителите уникално изживяване с богат набор от спортни събития, казино игри и бонуси. Създаден специално за българските играчи, сайтът предлага лесен достъп до различни пазари за залагания, включително футбол, тенис, баскетбол, eSports и много други.
### Какво прави 1win предпочитан избор?
1win се отличава с интуитивен интерфейс, който прави навигацията лесна дори за начинаещите потребители. Независимо дали сте фен на спортни залози или обичате казино игри, платформата предлага високо ниво на сигурност и разнообразие от възможности за забавление.
### Бонуси и промоции
1win привлича вниманието със своите щедри бонуси. Новите потребители могат да се възползват от бонус за първи депозит, който значително увеличава техните средства за залагане. Освен това, сайтът редовно предлага различни промоции и бонус кодове, които дават допълнителни награди и стимули.
### Казино игри на 1win
Казино секцията на 1win предлага стотици слотове, рулетка, блекджек и бакара, като игрите са разработени от водещи софтуерни доставчици. Любителите на казиното могат да се насладят на разнообразие от заглавия с реалистична графика и вълнуващи джакпоти.
### Спортни залози на живо
1win предлага възможност за залози на живо, което прави играта още по-интерактивна. Потребителите могат да залагат в реално време на любимите си спортове и да следят динамиката на резултатите директно на сайта. Възможността за бързо уреждане на залози и актуализация на коефициентите допълнително засилва удоволствието от играта.
### Мобилно приложение
За потребителите, които обичат да залагат в движение, 1win предлага мобилно приложение, достъпно за Android и iOS. Приложението е бързо и лесно за употреба, като предоставя същите функции и удобства като десктоп версията на сайта.
### Безопасност и надеждност
1win се грижи за сигурността на личните данни и финансовите операции на своите потребители. Сайтът използва модерни технологии за криптиране и предоставя няколко метода за депозити и тегления, включително банкови карти, електронни портфейли и криптовалути.
### Регистрация и поддръжка
Процесът на регистрация в 1win е бърз и лесен, а екипът по поддръжка е винаги готов да помогне на потребителите при възникнали въпроси или проблеми. Клиентите могат да се свържат с поддръжката чрез чат на живо или имейл по всяко време на денонощието.
С 1win ще откриете един нов свят на забавление и възможности за печалба. Регистрирайте се днес и се възползвайте от всички предимства, които платформата предлага!
https://andyfreund.de/wiki/index.php?title=1win_Bg_7148f
"http://www.annunciogratis.net/author/mathewmober" says:
Vavada Casino pruža vrhunsko iskustvo online kockanja za sve ljubitelje igara na sreću. Sa modernim dizajnom i širokim spektrom igara, ovaj kazino je savršeno mjesto za one koji traže zabavu i šansu za osvajanje velikih dobitaka.
Jedna od glavnih prednosti Vavada Casina je ogromna ponuda slot igara, uključujući popularne naslove od vodećih provajdera kao što su NetEnt, Microgaming i Yggdrasil. Igrači mogu birati između klasičnih slotova, video slotova, kao i igara sa progresivnim jackpotom. Pored slotova, Vavada nudi i širok izbor stolnih igara kao što su blackjack, rulet i poker, kako bi zadovoljili sve ukuse.
Registracija na Vavada Casino je brza i jednostavna, a novi igrači mogu iskoristiti atraktivne bonuse dobrodošlice i redovne promocije. Platforma je prilagođena korisnicima i dostupna na različitim uređajima, što omogućava igračima da uživaju u omiljenim igrama bilo gdje i bilo kada.
Za sigurnost i pouzdanost, Vavada Casino koristi najnovije tehnologije šifrovanja, čime osigurava privatnost i zaštitu podataka igrača. Brze isplate i različite metode plaćanja omogućavaju bezbrižno uživanje u igri, bez nepotrebnih komplikacija.
Pridružite se Vavada Casinu već danas i otkrijte zašto je ovo jedan od najboljih online kazina na tržištu!
https://simpsonshop.fr/community/profile/alejandrobaudin
"https://versatilecommunication.com/mostbet-az-casino-5877d/" says:
Mostbet – Azərbaycan oyunçuları üçün etibarlı bahis və kazino platforması
Mostbet platforması Azərbaycan oyunçuları üçün ən etibarlı və populyar bahis və kazino saytlarından biridir. Mostbet, geniş idman növləri, müxtəlif casino oyunları və istifadəçilərə təklif etdiyi sərfəli bonuslar ilə seçilir. Sayt Azərbaycan dilində təqdim olunur və yerli oyunçulara rahat və sürətli xidmət göstərir.
### İdman Bahisləri
Mostbet-də siz dünya üzrə ən məşhur idman növlərinə bahis edə bilərsiniz: futbol, basketbol, voleybol, tennis və daha çox. Canlı bahis imkanları ilə oyunlar zamanı dəyişən əmsallar vasitəsilə şanslarınızı qiymətləndirmək və daha çox qazanmaq imkanınız var. Xüsusilə də futbol sevənlər üçün Azərbaycan Premyer Liqası daxil olmaqla, çoxsaylı yerli və beynəlxalq turnirlər üzrə bahis variantları təqdim olunur.
### Kazino Oyunları
Mostbet platformasında təqdim edilən kazino bölməsi isə dünya üzrə ən populyar slot oyunları, kart oyunları və canlı kazino ilə zəngindir. Siz blackjack, ruletka, bakara və daha çox masa oyunlarını canlı krupiyerlərlə oynaya bilərsiniz. Həmçinin, yüksək qrafika və maraqlı bonus turları ilə slot oyunları oyunçulara fərqli əyləncə təcrübəsi təklif edir.
### Bonuslar və Kampaniyalar
Mostbet-in Azərbaycan istifadəçiləri üçün geniş bonus sistemi var. İlk depozitdən başlayan xoş gəlmə bonusları ilə yanaşı, müntəzəm istifadəçilər üçün də cashback, pulsuz fırlanmalar və digər kampaniyalar təklif olunur. Bu bonuslar hesabınızı artırmağa və oyuna daha çox sərmayə qoymadan böyük qazanc əldə etməyə imkan verir.
### Təhlükəsizlik və Müştəri Dəstəyi
Mostbet platforması lisenziyalı və qanuni fəaliyyət göstərir, bu da oyunçuların təhlükəsizliyinə zəmanət verir. Sizin şəxsi və maliyyə məlumatlarınız yüksək səviyyəli şifrələmə texnologiyaları ilə qorunur. Əgər hər hansı sualınız və ya problemləriniz varsa, Mostbet-in 24/7 fəaliyyət göstərən müştəri dəstəyi komandası ilə əlaqə saxlaya bilərsiniz.
### Ödəniş Metodları
Mostbet, Azərbaycan oyunçuları üçün rahat ödəniş üsulları təklif edir. Kartla ödəniş, elektron pulqabılar və digər üsullarla asanlıqla pul yatırıb və qazanclarınızı çıxara bilərsiniz. Bütün əməliyyatlar tez və təhlükəsiz şəkildə həyata keçirilir.
Mostbet platforması Azərbaycan oyunçuları üçün həm idman bahislərində, həm də kazino oyunlarında ən yaxşı təcrübəni təqdim etməklə, əyləncəni və qazancı bir araya gətirir. Elə indi qoşulun və Mostbet-in üstünlüklərindən yararlanın!
https://menwiki.men/wiki/User:NoeliaFrith3
"https://lovewiki.faith/wiki/User:HyeBrandenburg" says:
Mostbet – Azərbaycan oyunçuları üçün etibarlı bahis və kazino platforması
Mostbet platforması Azərbaycan oyunçuları üçün ən etibarlı və populyar bahis və kazino saytlarından biridir. Mostbet, geniş idman növləri, müxtəlif casino oyunları və istifadəçilərə təklif etdiyi sərfəli bonuslar ilə seçilir. Sayt Azərbaycan dilində təqdim olunur və yerli oyunçulara rahat və sürətli xidmət göstərir.
### İdman Bahisləri
Mostbet-də siz dünya üzrə ən məşhur idman növlərinə bahis edə bilərsiniz: futbol, basketbol, voleybol, tennis və daha çox. Canlı bahis imkanları ilə oyunlar zamanı dəyişən əmsallar vasitəsilə şanslarınızı qiymətləndirmək və daha çox qazanmaq imkanınız var. Xüsusilə də futbol sevənlər üçün Azərbaycan Premyer Liqası daxil olmaqla, çoxsaylı yerli və beynəlxalq turnirlər üzrə bahis variantları təqdim olunur.
### Kazino Oyunları
Mostbet platformasında təqdim edilən kazino bölməsi isə dünya üzrə ən populyar slot oyunları, kart oyunları və canlı kazino ilə zəngindir. Siz blackjack, ruletka, bakara və daha çox masa oyunlarını canlı krupiyerlərlə oynaya bilərsiniz. Həmçinin, yüksək qrafika və maraqlı bonus turları ilə slot oyunları oyunçulara fərqli əyləncə təcrübəsi təklif edir.
### Bonuslar və Kampaniyalar
Mostbet-in Azərbaycan istifadəçiləri üçün geniş bonus sistemi var. İlk depozitdən başlayan xoş gəlmə bonusları ilə yanaşı, müntəzəm istifadəçilər üçün də cashback, pulsuz fırlanmalar və digər kampaniyalar təklif olunur. Bu bonuslar hesabınızı artırmağa və oyuna daha çox sərmayə qoymadan böyük qazanc əldə etməyə imkan verir.
### Təhlükəsizlik və Müştəri Dəstəyi
Mostbet platforması lisenziyalı və qanuni fəaliyyət göstərir, bu da oyunçuların təhlükəsizliyinə zəmanət verir. Sizin şəxsi və maliyyə məlumatlarınız yüksək səviyyəli şifrələmə texnologiyaları ilə qorunur. Əgər hər hansı sualınız və ya problemləriniz varsa, Mostbet-in 24/7 fəaliyyət göstərən müştəri dəstəyi komandası ilə əlaqə saxlaya bilərsiniz.
### Ödəniş Metodları
Mostbet, Azərbaycan oyunçuları üçün rahat ödəniş üsulları təklif edir. Kartla ödəniş, elektron pulqabılar və digər üsullarla asanlıqla pul yatırıb və qazanclarınızı çıxara bilərsiniz. Bütün əməliyyatlar tez və təhlükəsiz şəkildə həyata keçirilir.
Mostbet platforması Azərbaycan oyunçuları üçün həm idman bahislərində, həm də kazino oyunlarında ən yaxşı təcrübəni təqdim etməklə, əyləncəni və qazancı bir araya gətirir. Elə indi qoşulun və Mostbet-in üstünlüklərindən yararlanın!
https://www.numeracy.wiki/index.php/Mostbet_Az_Casino_8815O
"https://wiki.team-glisto.com/index.php?title=Benutzer:Evie70390999744" says:
Mostbet – Azərbaycan oyunçuları üçün etibarlı bahis və kazino platforması
Mostbet platforması Azərbaycan oyunçuları üçün ən etibarlı və populyar bahis və kazino saytlarından biridir. Mostbet, geniş idman növləri, müxtəlif casino oyunları və istifadəçilərə təklif etdiyi sərfəli bonuslar ilə seçilir. Sayt Azərbaycan dilində təqdim olunur və yerli oyunçulara rahat və sürətli xidmət göstərir.
### İdman Bahisləri
Mostbet-də siz dünya üzrə ən məşhur idman növlərinə bahis edə bilərsiniz: futbol, basketbol, voleybol, tennis və daha çox. Canlı bahis imkanları ilə oyunlar zamanı dəyişən əmsallar vasitəsilə şanslarınızı qiymətləndirmək və daha çox qazanmaq imkanınız var. Xüsusilə də futbol sevənlər üçün Azərbaycan Premyer Liqası daxil olmaqla, çoxsaylı yerli və beynəlxalq turnirlər üzrə bahis variantları təqdim olunur.
### Kazino Oyunları
Mostbet platformasında təqdim edilən kazino bölməsi isə dünya üzrə ən populyar slot oyunları, kart oyunları və canlı kazino ilə zəngindir. Siz blackjack, ruletka, bakara və daha çox masa oyunlarını canlı krupiyerlərlə oynaya bilərsiniz. Həmçinin, yüksək qrafika və maraqlı bonus turları ilə slot oyunları oyunçulara fərqli əyləncə təcrübəsi təklif edir.
### Bonuslar və Kampaniyalar
Mostbet-in Azərbaycan istifadəçiləri üçün geniş bonus sistemi var. İlk depozitdən başlayan xoş gəlmə bonusları ilə yanaşı, müntəzəm istifadəçilər üçün də cashback, pulsuz fırlanmalar və digər kampaniyalar təklif olunur. Bu bonuslar hesabınızı artırmağa və oyuna daha çox sərmayə qoymadan böyük qazanc əldə etməyə imkan verir.
### Təhlükəsizlik və Müştəri Dəstəyi
Mostbet platforması lisenziyalı və qanuni fəaliyyət göstərir, bu da oyunçuların təhlükəsizliyinə zəmanət verir. Sizin şəxsi və maliyyə məlumatlarınız yüksək səviyyəli şifrələmə texnologiyaları ilə qorunur. Əgər hər hansı sualınız və ya problemləriniz varsa, Mostbet-in 24/7 fəaliyyət göstərən müştəri dəstəyi komandası ilə əlaqə saxlaya bilərsiniz.
### Ödəniş Metodları
Mostbet, Azərbaycan oyunçuları üçün rahat ödəniş üsulları təklif edir. Kartla ödəniş, elektron pulqabılar və digər üsullarla asanlıqla pul yatırıb və qazanclarınızı çıxara bilərsiniz. Bütün əməliyyatlar tez və təhlükəsiz şəkildə həyata keçirilir.
Mostbet platforması Azərbaycan oyunçuları üçün həm idman bahislərində, həm də kazino oyunlarında ən yaxşı təcrübəni təqdim etməklə, əyləncəni və qazancı bir araya gətirir. Elə indi qoşulun və Mostbet-in üstünlüklərindən yararlanın!
https://offmarketbusinessforsale.com/mostbet-az-casino-4981w/
"https://spudz.org/index.php?title=Mostbet_Az_Casino_1751p" says:
Mostbet – Azərbaycan oyunçuları üçün etibarlı bahis və kazino platforması
Mostbet platforması Azərbaycan oyunçuları üçün ən etibarlı və populyar bahis və kazino saytlarından biridir. Mostbet, geniş idman növləri, müxtəlif casino oyunları və istifadəçilərə təklif etdiyi sərfəli bonuslar ilə seçilir. Sayt Azərbaycan dilində təqdim olunur və yerli oyunçulara rahat və sürətli xidmət göstərir.
### İdman Bahisləri
Mostbet-də siz dünya üzrə ən məşhur idman növlərinə bahis edə bilərsiniz: futbol, basketbol, voleybol, tennis və daha çox. Canlı bahis imkanları ilə oyunlar zamanı dəyişən əmsallar vasitəsilə şanslarınızı qiymətləndirmək və daha çox qazanmaq imkanınız var. Xüsusilə də futbol sevənlər üçün Azərbaycan Premyer Liqası daxil olmaqla, çoxsaylı yerli və beynəlxalq turnirlər üzrə bahis variantları təqdim olunur.
### Kazino Oyunları
Mostbet platformasında təqdim edilən kazino bölməsi isə dünya üzrə ən populyar slot oyunları, kart oyunları və canlı kazino ilə zəngindir. Siz blackjack, ruletka, bakara və daha çox masa oyunlarını canlı krupiyerlərlə oynaya bilərsiniz. Həmçinin, yüksək qrafika və maraqlı bonus turları ilə slot oyunları oyunçulara fərqli əyləncə təcrübəsi təklif edir.
### Bonuslar və Kampaniyalar
Mostbet-in Azərbaycan istifadəçiləri üçün geniş bonus sistemi var. İlk depozitdən başlayan xoş gəlmə bonusları ilə yanaşı, müntəzəm istifadəçilər üçün də cashback, pulsuz fırlanmalar və digər kampaniyalar təklif olunur. Bu bonuslar hesabınızı artırmağa və oyuna daha çox sərmayə qoymadan böyük qazanc əldə etməyə imkan verir.
### Təhlükəsizlik və Müştəri Dəstəyi
Mostbet platforması lisenziyalı və qanuni fəaliyyət göstərir, bu da oyunçuların təhlükəsizliyinə zəmanət verir. Sizin şəxsi və maliyyə məlumatlarınız yüksək səviyyəli şifrələmə texnologiyaları ilə qorunur. Əgər hər hansı sualınız və ya problemləriniz varsa, Mostbet-in 24/7 fəaliyyət göstərən müştəri dəstəyi komandası ilə əlaqə saxlaya bilərsiniz.
### Ödəniş Metodları
Mostbet, Azərbaycan oyunçuları üçün rahat ödəniş üsulları təklif edir. Kartla ödəniş, elektron pulqabılar və digər üsullarla asanlıqla pul yatırıb və qazanclarınızı çıxara bilərsiniz. Bütün əməliyyatlar tez və təhlükəsiz şəkildə həyata keçirilir.
Mostbet platforması Azərbaycan oyunçuları üçün həm idman bahislərində, həm də kazino oyunlarında ən yaxşı təcrübəni təqdim etməklə, əyləncəni və qazancı bir araya gətirir. Elə indi qoşulun və Mostbet-in üstünlüklərindən yararlanın!
https://higgysofficeservices.com/mostbet-az-casino-8715s/
"https://wiki.rrtn.org/wiki/index.php/Mostbet_Az_Casino_5842b" says:
Mostbet – Azərbaycan oyunçuları üçün etibarlı bahis və kazino platforması
Mostbet platforması Azərbaycan oyunçuları üçün ən etibarlı və populyar bahis və kazino saytlarından biridir. Mostbet, geniş idman növləri, müxtəlif casino oyunları və istifadəçilərə təklif etdiyi sərfəli bonuslar ilə seçilir. Sayt Azərbaycan dilində təqdim olunur və yerli oyunçulara rahat və sürətli xidmət göstərir.
### İdman Bahisləri
Mostbet-də siz dünya üzrə ən məşhur idman növlərinə bahis edə bilərsiniz: futbol, basketbol, voleybol, tennis və daha çox. Canlı bahis imkanları ilə oyunlar zamanı dəyişən əmsallar vasitəsilə şanslarınızı qiymətləndirmək və daha çox qazanmaq imkanınız var. Xüsusilə də futbol sevənlər üçün Azərbaycan Premyer Liqası daxil olmaqla, çoxsaylı yerli və beynəlxalq turnirlər üzrə bahis variantları təqdim olunur.
### Kazino Oyunları
Mostbet platformasında təqdim edilən kazino bölməsi isə dünya üzrə ən populyar slot oyunları, kart oyunları və canlı kazino ilə zəngindir. Siz blackjack, ruletka, bakara və daha çox masa oyunlarını canlı krupiyerlərlə oynaya bilərsiniz. Həmçinin, yüksək qrafika və maraqlı bonus turları ilə slot oyunları oyunçulara fərqli əyləncə təcrübəsi təklif edir.
### Bonuslar və Kampaniyalar
Mostbet-in Azərbaycan istifadəçiləri üçün geniş bonus sistemi var. İlk depozitdən başlayan xoş gəlmə bonusları ilə yanaşı, müntəzəm istifadəçilər üçün də cashback, pulsuz fırlanmalar və digər kampaniyalar təklif olunur. Bu bonuslar hesabınızı artırmağa və oyuna daha çox sərmayə qoymadan böyük qazanc əldə etməyə imkan verir.
### Təhlükəsizlik və Müştəri Dəstəyi
Mostbet platforması lisenziyalı və qanuni fəaliyyət göstərir, bu da oyunçuların təhlükəsizliyinə zəmanət verir. Sizin şəxsi və maliyyə məlumatlarınız yüksək səviyyəli şifrələmə texnologiyaları ilə qorunur. Əgər hər hansı sualınız və ya problemləriniz varsa, Mostbet-in 24/7 fəaliyyət göstərən müştəri dəstəyi komandası ilə əlaqə saxlaya bilərsiniz.
### Ödəniş Metodları
Mostbet, Azərbaycan oyunçuları üçün rahat ödəniş üsulları təklif edir. Kartla ödəniş, elektron pulqabılar və digər üsullarla asanlıqla pul yatırıb və qazanclarınızı çıxara bilərsiniz. Bütün əməliyyatlar tez və təhlükəsiz şəkildə həyata keçirilir.
Mostbet platforması Azərbaycan oyunçuları üçün həm idman bahislərində, həm də kazino oyunlarında ən yaxşı təcrübəni təqdim etməklə, əyləncəni və qazancı bir araya gətirir. Elə indi qoşulun və Mostbet-in üstünlüklərindən yararlanın!
http://www.annunciogratis.net/author/sybil295644
Crystle Tunbridge says:
Hi my loved one! I want to say that this article is amazing, great written and include approximately all significant infos. I’d like to look more posts like this . d54j
hs4
sreh
dt
dt
h
hs4
tj
tyu
j
8olk
j
j
4eyr
dt
hs4
s
hew
4eyr
jh
dt
w
j
d54j
we4
4sdj
4j
4j
lke
lke
ytkj
tj
j
j
j
we4
4sdj
we4
ytkj
ty
dt
hs4
d54j
j
4j
45ds
8olk
dt
j
h4sd
j
45ds
ghw
nhd5
jh
dt
tyu
dtj
8olk
rh
45ds
4e3b
hs4
etki
dt
h4sd
h4sd
4j
rh
rh
we4
45ds
j
4eyr
ghw
4sdj
k
sdg
jh
jh
sdg
nhd5
4eyr
4eyr
4sdj
45ds
sdg
tyu
s
8olk
nhd5
tj
4e3b
sg
sg
dtj
j
sg
dt
dt
h4sd
sdg
sreh
j
nhd5
h4sd
45ds
sdg
dt
ytkj
s
tyu
sreh
tyu
dtj
dtj
4j
4e3b
4eyr
jh
k
k
ytkj
tyu
s
4eyr
h
etki
j
jh
hs4
tj
h4sd
dt
4sdj
ytkj
sdg
nhd5
4e3b
4sdj
jh
lke
8olk
nhd5
sg
sg
w
nhd5
sdg
rh
sreh
we4
dt
lke
4e3b
rh
45ds
k
w
h4sd
4sdj
rh
4sdj
j
rh
s
j
sg
rh
tj
tyu
ytkj
8olk
h4sd
hs4
j
hs4
ty
45ds
4j
we4
dt
sdg
hew
jh
4sdj
sreh
sreh
4e3b
hs4
sreh
sg
dt
dtj
rh
h4sd
4sdj
etki
dt
j
h
hew
dtj
tj
4eyr
tyu
h4sd
sreh
ty
jh
4e3b
rh
k
4eyr
8olk
sdg
dt
etki
nhd5
45ds
hs4
sdg
s
d54j
etki
s
jh
8olk
ty
j
jh
tyu
4j
4sdj
hs4
w
hew
k
etki
j
w
ytkj
j
w
hew
ty
lke
w
dt
j
4sdj
nhd5
tyu
4eyr
lke
s
s
dt
ghw
4sdj
sg
4eyr
j
hs4
j
dt
ytkj
j
jh
ty
tj
hew
jh
hs4
dt
s
nhd5
sreh
h4sd
j
hew
lke
k
sdg
ytkj
ty
dt
nhd5
h
j
etki
h
hew
tj
we4
4e3b
4j
sdg
dt
hs4
k
4e3b
we4
hs4
rh
ghw
dt
4sdj
4j
etki
ytkj
d54j
j
45ds
4e3b
4e3b
sdg
jh
h4sd
hs4
lke
sg
dt
nhd5
nhd5
ytkj
4j
j
nhd5
j
sg
4e3b
h4sd
dt
dtj
dtj
sreh
lke
hs4
tyu
sg
hew
jh
h4sd
45ds
j
lke
jh
j
4eyr
45ds
sreh
tj
4sdj
dt
s
"https://anabolenenmedicijnen.com/mostbet-az-casino-7314u/" says:
Mostbet – Azərbaycan oyunçuları üçün etibarlı bahis və kazino platforması
Mostbet platforması Azərbaycan oyunçuları üçün ən etibarlı və populyar bahis və kazino saytlarından biridir. Mostbet, geniş idman növləri, müxtəlif casino oyunları və istifadəçilərə təklif etdiyi sərfəli bonuslar ilə seçilir. Sayt Azərbaycan dilində təqdim olunur və yerli oyunçulara rahat və sürətli xidmət göstərir.
### İdman Bahisləri
Mostbet-də siz dünya üzrə ən məşhur idman növlərinə bahis edə bilərsiniz: futbol, basketbol, voleybol, tennis və daha çox. Canlı bahis imkanları ilə oyunlar zamanı dəyişən əmsallar vasitəsilə şanslarınızı qiymətləndirmək və daha çox qazanmaq imkanınız var. Xüsusilə də futbol sevənlər üçün Azərbaycan Premyer Liqası daxil olmaqla, çoxsaylı yerli və beynəlxalq turnirlər üzrə bahis variantları təqdim olunur.
### Kazino Oyunları
Mostbet platformasında təqdim edilən kazino bölməsi isə dünya üzrə ən populyar slot oyunları, kart oyunları və canlı kazino ilə zəngindir. Siz blackjack, ruletka, bakara və daha çox masa oyunlarını canlı krupiyerlərlə oynaya bilərsiniz. Həmçinin, yüksək qrafika və maraqlı bonus turları ilə slot oyunları oyunçulara fərqli əyləncə təcrübəsi təklif edir.
### Bonuslar və Kampaniyalar
Mostbet-in Azərbaycan istifadəçiləri üçün geniş bonus sistemi var. İlk depozitdən başlayan xoş gəlmə bonusları ilə yanaşı, müntəzəm istifadəçilər üçün də cashback, pulsuz fırlanmalar və digər kampaniyalar təklif olunur. Bu bonuslar hesabınızı artırmağa və oyuna daha çox sərmayə qoymadan böyük qazanc əldə etməyə imkan verir.
### Təhlükəsizlik və Müştəri Dəstəyi
Mostbet platforması lisenziyalı və qanuni fəaliyyət göstərir, bu da oyunçuların təhlükəsizliyinə zəmanət verir. Sizin şəxsi və maliyyə məlumatlarınız yüksək səviyyəli şifrələmə texnologiyaları ilə qorunur. Əgər hər hansı sualınız və ya problemləriniz varsa, Mostbet-in 24/7 fəaliyyət göstərən müştəri dəstəyi komandası ilə əlaqə saxlaya bilərsiniz.
### Ödəniş Metodları
Mostbet, Azərbaycan oyunçuları üçün rahat ödəniş üsulları təklif edir. Kartla ödəniş, elektron pulqabılar və digər üsullarla asanlıqla pul yatırıb və qazanclarınızı çıxara bilərsiniz. Bütün əməliyyatlar tez və təhlükəsiz şəkildə həyata keçirilir.
Mostbet platforması Azərbaycan oyunçuları üçün həm idman bahislərində, həm də kazino oyunlarında ən yaxşı təcrübəni təqdim etməklə, əyləncəni və qazancı bir araya gətirir. Elə indi qoşulun və Mostbet-in üstünlüklərindən yararlanın!
https://tutorialslots.com/index.php?qa=113982&qa_1=mostbet-az-casino-5704s
http://superliteiixl60.Com says:
Whilst salaries for foreign workers can be competitive, the expense of living in key cities can also be higher.
Feel free to surf to my homepage: http://superliteiixl60.com/__media__/js/netsoltrademark.php?d=jobs18.luwebs.com%2F29280011%2Fhow-to-locate-the-ideal-pub-employment
лучшие онлайн казино с лицензией и бонусами says:
Лучшие мобильные https://t.me/s/cazinotopnews казино с бонусами
Виртуальные развлечения завоевали сердца многих игроков по всему миру. Интерес к играм на удачу растет, привлекая новые аудитории. Специальные акции часто становятся основным мотивом для выбора того или иного места проведения досуга. Здесь открываются широкие горизонты и возможности, которые сложно игнорировать. Как же ориентироваться в этом океане предложений?
Множество платформ предлагают своим пользователям уникальные условия, которые радуют начинающих и опытных участников. Необходимо учитывать разнообразие игр, финансовые аспекты и, конечно, привилегии, которые делают каждое мгновение более захватывающим. К примеру, выгодные условия могут проявляться не только в денежном, но и в игровых предложениях, что увеличивает шансы на успех. И каждый раз, когда появляется новая инициатива, игроки с нетерпением изучают ее детали.
Существуют различные типы акций, которые способны заинтересовать людей любого уровня подготовки. Каждый желающий всегда может найти подходящий вариант, который соответствует его стилю игры. Понимание всех нюансов и тонкостей становится залогом успеха и уверенности в своих действиях. Особенно важно изучать не только правила, но и то, как получать удовольствия от новых предложений.
В конечном итоге, от правильного выбора площадки зависит не только ваше времяпрепровождение, но и финансовая составляющая. Поспешность может привести к сомнительным решениям, поэтому стоит обратить внимание на рейтинги и отзывы. Обязательно рассмотрите возможности, которые открываются перед вами, и будьте готовы к увлекательному опыту, ведь каждое мгновение может стать началом чего-то действительно необычного и захватывающего.
Как выбрать лучшее заведение для азартных игр
Перед тем как делать выбор, учитывайте доступность платформы. Перейдите на сайт и посмотрите, насколько удобно использовать интерфейс. Также важен выбор игровых автоматов и других развлечений. Они должны соответствовать вашим интересам. Попробуйте обратить внимание и на наличие демонстрационной версии. Это бывает полезным для тех, кто хочет попробовать игры без риска утраты средств.
Не забудьте про лицензии и репутацию заведения. Надежные операторы предоставляют все необходимые документы для подтверждения своей легитимности. Исследуйте отзывы других участников игрового процесса. Иногда можно найти как положительные, так и отрицательные мнения, которые помогут составить более полное представление о платформе. Особое внимание уделите источникам информации, поскольку не все они столь же надежны.
Наконец, выясните, какие акции и предложения вам доступны. Периодические рекламные кампании могут улучшить ваш игровой опыт. Но учитывайте условия, при которых они действуют. Это позволит избежать непредвиденных ситуаций в дальнейшем. Также важно понимать, что акции часто имеют ограничения. Поэтому стоит внимательно изучить правила, чтобы использовать их в полной мере.
Бонусы и их влияние на игровой опыт
Привлечение игроков в заведения различного формата осуществляются преимущественно через щедрые предложения и различные акции. Эти инициативы не только повышают интерес, но и значительно улучшают ощущения людей от игрового процесса. Наличие привлекательных предложений может сыграть решающую роль. И если разговор заходит о ставках, это абсолютно нормально, что каждый хочет ощущать выгоду от своей активности.
Эти поощрения могут варьироваться от приветственных акций до периодических раздач. Особенно популярными являются бездепозитные предложения, которые предоставляют возможность попробовать свои силы без лишних затрат. Это отличный способ повысить уверенность и обратиться к новым стратегиям. А могут быть и дополнительные вознаграждения за активность. Они увеличивают шансы на успех.
Так как же бонусы влияют на игровой процесс? Во-первых, они увеличивают бюджет пользователя, позволяя делать больше ставок и, соответственно, продлевать время игры. Однако есть и обратная сторона медали. Многие игроки, ослепленные перспективами выигрыша, могут забыть о пределах разумного и рисковать больше, чем планировали изначально.
Важно понимать, что каждый вид предложений имеет свои нюансы. Часто они сопровождаются условиями, требующими внимательного изучения. Так, распорядок использования вознаграждений может включать в себя требования по отыгрышу. Именно эти аспекты могут сделать предложение менее привлекательным, чем оно кажется на первый взгляд.
Кроме того, выгода от бонусов также зависит от личных предпочтений игроков и их опыта. Привлеченные вниманием предложения способны заинтересовать новичков, однако более опытные участники могут акцентироваться на реальной выгоде без ловушек.
В конечном итоге, грамотное использование этих акций может существенно обогатить игровой опыт. Важно оставаться осведомлённым, внимательно анализировать каждую возможность и подходить к игре с умом. Все эти аспекты составляют неотъемлемую часть стратегии, способной максимально приумножить удовольствие от процесса.
Бонусы и их влияние на игровой опыт
Предложения, которые привлекают внимание и стимулируют интерес участников, играют ключевую роль в выборе платформы для отдыха. Эти стимулы могут менять правила игры, меняя восприятие и эмоциональную окраску всего процесса. Часто игра интереснее, когда есть возможность получить дополнительные преимущества. Увлекательные возможности открываются, когда на кону стоят приятные сюрпризы.
Каждое предложение имеет свои особенности. Условия получения, активирования и использования варьируются. Иногда они содержат отличные шансы для обогащения. Имея это в виду, участники должны быть внимательны. Не все предложенные варианты одинаково полезны.
Значимым аспектом является то, что предложения могут добавить разнообразия в игровой процесс. Это создаёт дополнительный слой вовлечённости, позволяя игрокам экспериментировать с новыми играми и стратегиями. Например, некоторые платформы предоставляют щедрые пакеты для новичков, что позволяет им значительно увеличить свои шансы на успех в начале пути. В свою очередь, опытные участники могут наслаждаться программами лояльности, которые предлагают дополнительные награды за постоянство.
Каждый игрок уникален, и то, что подходит одному, может не подойти другому. Поэтому важно тщательно изучить доступные опции, обращая внимание на детали. Условия могут меняться, также как и подходы к их использованию. Сравнивая предложения, имейте в виду, что привычный подход не всегда приводит к желаемому результату. Погружаясь в мир предложений, игроки могут столкнуться с множеством подходов и стратегий, которые обогатят их игровой опыт.
Ключевая задача заключается в том, чтобы найти ту комбинацию, которая наилучшим образом соответствует вашим интересам. Лучше изучить все возможности, чем спешить с решением. В конечном итоге, получение интересных предложений может значительно повлиять на общий опыт, завершая его на положительной ноте и оставляя желание возвращаться вновь.
печать квадратных фотографий says:
Распечатка фотографий — это процесс переноса изображений с цифровых носителей на бумагу. Мы предлагаем качественные услуги по доступной цене. У нас вы можете заказать https://kubik-kazan.ru/pechatnie-uslugi/ от стандартных до нестандартных. Работаем с разными видами бумаги и предлагаем различные виды отделки: ламинирование, глянцевая и матовая ламинация, покрытие лаком.
Супруга Воронина: женщина says:
Супруга Воронина: женщина и Владимир Александрович.
Биография предпринимателя и супруги всегда была тесно связана.
«Семья никогда не настаивала, чтобы я пошел работать. Это был мой интерес и мой выбор».
Кроме того, Воронин с женой стали лауреатами множества отраслевых премий. ФСК Владимир Воронин.
https://www.youtube.com/watch?v=NntCT5Wllvo
cryptoboss says:
В онлайн казино ты можешь играть в любое время и в любом месте. Получи бонусы, вращай барабаны слотов или пробуй стратегию в блэкджеке и покере.
https://telegra.ph/Cryptoboss-Casino–Casino-Kriptoboss-2024-Oficialnyj-obzor-igrajte-na-kriptovalyuty-onlajn-09-14
gold ira company ratings says:
There is evidently a bunch to identify about this. I assume you made various nice points in features also.
Antonio Van says:
acquire the whole shebang is unflappable, I encourage, people you intent not cry over repentance! The whole kit is fine, as a result of you. Everything works, thank you. Admin, thanks you. Thank you on the great site.
Credit you decidedly much, I was waiting to believe, like on no occasion previously!
go for wonderful, everything works distinguished, and who doesn’t like it, corrupt yourself a goose, and affaire de coeur its perception!
лечение кариеса says:
Любому человеку рано или поздно приходится пользоваться услугами стоматологических клиник. Ни для кого не секрет, что лечение зубов и последующее протезирование – процедуры довольно дорогостоящие, не все граждане могут позволить себе их оплатить, если вам необходимо https://maestrostom.ru/ мы Вам обязательно поможем.
Особенности
Благодаря услугам, которые предлагает населению стоматология Маэстро, люди разного финансового достатка имеют возможность не только поддерживать здоровье полости рта, но и проходить все необходимые процедуры. Цены на лечение зубов и протезирование значительно ниже, чем в других медучреждениях. Несмотря на то, что клиника работает для широких слоев населения, пациенты получают полный перечень услуг, используя современное оборудование и качественные материалы. Жителям доступны следующие процедуры:
• профилактика полости рта;
• лечение зубов с использованием различных методов;
• полная диагностика;
• профессиональная чистка;
• отбеливание;
• протезирование.
Сотрудники учреждения соблюдают все санитарные нормы, а для тщательной дезинфекции и стерилизации инструментов предусмотрено современное оборудование.
Преимущества
Востребованность бюджетной стоматологии объясняется рядом преимуществ. Во-первых, в клинике трудятся опытные высококвалифицированные сотрудники. Во-вторых, к каждому пациенту врач находит подход. В-третьих, кабинеты оснащены всем необходимым оборудованием, в работе используют только качественные безопасные материалы. В-четвертых, все виды протезирования будут проведены в сжатые сроки. Многие клиники получают субсидии от государства, что позволяет существенно сократить расходы. Кроме того, некоторые стоматологии сотрудничают со страховыми компаниями, поэтому у пациентов появляется возможность получить услуги по полюсу ОМС. Пациенты получают консультацию по профилактике заболеваний полости рта. Врачи после тщательного осмотра составляют индивидуальный план лечения, с помощью которого удается добиться наилучшего результата. Более доступные цены достигаются не только благодаря государственному финансированию, но и оптимизации расходов.
Благодаря стоматологии Маэстро, человек с небольшим достатком может не только вылечить зубы, но и поддерживать здоровье ротовой полости. Теперь любой человек может не откладывать поход к стоматологу, выбирая доступное качественное обслуживание.
Dino Lapham says:
Hey, I think your site might be having browser compatibility issues. When I look at your website in Ie, it looks fine but when opening in Internet Explorer, it has some overlapping. I just wanted to give you a quick heads up! Other then that, fantastic blog!
Merry Gertrude says:
First of all I want to say excellent blog! I had a quick question which I’d like to ask if you do not mind. I was curious to know how you center yourself and clear your mind prior to writing. I have had trouble clearing my thoughts in getting my ideas out. I do enjoy writing however it just seems like the first 10 to 15 minutes are lost just trying to figure out how to begin. Any suggestions or tips? Kudos!
Selma Basham says:
Very good blog post. I certainly appreciate this website. Keep writing!
лучшая доставка еды казань says:
Ощутите все грани вкуса с доставкой фуршетных закусок от нашей компании! Мы предлагаем огромный выбор блюд, приготовленных по уникальным рецептам. Наши опытные повара вкладывают всю свою душу в каждую закуску, чтобы вы могли насладиться изысканным вкусом и ароматом.
Доставка осуществляется в удобное для Вас время, а наши курьеры всегда вежливы и пунктуальны. Мы гарантируем свежесть и качество наших продуктов, так как работаем только с проверенными поставщиками, вы можете всегда заказать https://zaicevgroup16.ru/buffet/.
Мы поможем Вам сделать Ваш праздник или бизнес-ланч незабываемым. Сделайте свой праздник еще ярче с доставкой фуршетных закусок!
top gold ira investment says:
Thanks on your marvelous posting! I actually enjoyed reading it, you happen to be a great author. I will be sure to bookmark your blog and will often come back at some point. I want to encourage yourself to continue your great job, have a nice day!
Swedish massage deep tissue says:
Repeat every stroke 5 times or focus on a precise area for 20 to 30 seconds.
Feel free to visit my site … http://gisdomain.net/__media__/js/netsoltrademark.php?d=qooh.me%2Fdellabernathy6
Alvin Gartrell says:
Despite the potential advantages, hydromassage isn’t secure for every person.
куплю арматуру казань says:
Продажа арматуры – это наш основной вид деятельности. Мы предлагаем огромный ассортимент арматуры, которая используется в различных сферах строительства. У нас вы сможете в любом обьеме найти https://smk116.ru/product-category/armatura/ как уголок, так и арматуру. Вся наша продукция отличается высоким качеством и надежностью. Мы сотрудничаем только с проверенными производителями, поэтому вы можете быть уверены в качестве нашей арматуры. Кроме того, мы предлагаем гибкую систему скидок для постоянных клиентов и строительных компаний. Если у вас возникли вопросы, наши специалисты всегда готовы помочь вам с выбором арматуры и предоставить профессиональную консультацию.
https://soft.droid-mob.Com/ says:
This is nicely said! .
Check out my webpage … https://soft.droid-mob.com/l.php?link=https://solink.in/lp4lxt
Rodrigo Stonehouse says:
blacksprut com products
Свободный доступ к маркетплейсу.
Кроме наркотиков, популярными товарами на сайте доступны фальшивые деньги и документы, инструкции разного рода по противозаконной деятельности.
На подобных ресурсах реализовываюся услуги, такие как сбыт наркотиков, интернет-безопасность, а так же взлом аккаунтов и другое.
Вспомним гидру (HYDRA), на ней всегда можно найти предложения по трудоустройству, как правило их больше всего в сфере производства и сбыта наркотиков. Тут тоже самое.
Есть различные виды наркотиков и их прекурсоров. героин – это опиаты, стимуляторы – это кокаин, соль, амфетамин. лсд грибы это галлюциногены, барбитураты – это депрессанты , каннабиоиды – это гашиш, трава, марихуана!
В штаты таких площадок, как Блэкспрут, Кракен, Мега, ОМГ входят сотни людей, в том числе служба безопасности, отдел рекламы, химики, наркологи, спортики и другие востребованные вакансии.
диспут blacksprut
На сайт можно зайти через TOR или через VPN. Если ссылка не рабочая, найдите другую.
BlackSprut зеркало
BlackSprut ссылка
BlackSprut сайт
BlackSprut официальный сайт
BlackSprut ссылка зеркало
актуальное зеркало BlackSprut
BlackSprut ссылка тор
BlackSprut зеркало рабочее
BlackSprut зеркало официальный
BlackSprut зеркало даркнет
BlackSprut зеркало тор
BlackSprut зеркало 2kmp
BlackSprut официальные ссылки
BlackSprut onion ссылка
BlackSprut ссылка для тору
BlackSprut ссылка зеркало официальный
BlackSprut зеркало BlackSpruttor site
BlackSprut сайт зеркала
БлекСпрут ссылка BlackSprut
BlackSprut официальный сайт зеркало
BlackSprut официальный сайт ссылка
BlackSprut ссылка зеркало официальный сайт
BlackSprut клирнет зеркало
BlackSprut tor зеркало
BlackSprut ссылка 2kmp
зеркала BlackSprut BlackSprut tor site
BlackSprut darknet ссылка
BlackSprut ссылка BlackSpruttor site
BlackSprut зеркало 2kmp vip
BlackSprut актуальные ссылки
BlackSprut ссылка tor
BlackSprut market ссылка
BlackSprut зеркало 2kmp biz
BlackSprut darknet зеркала
BlackSprut darknet market ссылка
BlackSprut darknet ссылка тор
ссылка BlackSprut BlackSprut tor site
BlackSprut 2 зеркало
BlackSprut ссылка 2kmp vip
рабочие ссылки BlackSprut
сайт БлекСпрут BlackSprut
BlackSprut ссылка 2kmp biz
зеркало BlackSprut market
BlackSprut сайт официальный 2kmp
ссылка БлекСпрут BlackSprut tor site
BlackSprut darknet market зеркало
BlackSprut ссылка зеркало рабочее
BlackSprut market ссылка тор
ссылка на БлекСпрут BlackSprut 7 one
BlackSprut зеркало ссылка онлайн
BlackSprut зеркало рабочее 2kmp vip
BlackSprut актуальные ссылки 2kmp biz
BlackSprut ссылка online
BlackSprut ссылка tor wiki online
BlackSprut ссылка зеркало официальный сайт 2kmp vip
BlackSprut актуальные ссылки 2kmp vip
BlackSprut ссылка на сайт
BlackSprut зеркало тор 2 kmp biz
BlackSprut сайт vk2
BlackSprut casino зеркало рабочее
BlackSprut клирнет зеркало 2kmp vip
ссылка на BlackSprut BlackSprut darknet top
БлекСпрут зеркало BlackSprut 7 one
ссылка на БлекСпрут BlackSprut darknet top
BlackSprut зеркало тор 2 kmp vip
BlackSprut зеркало BlackSprut clear com
BlackSprut ссылка BlackSprut zerkalo xyz
зеркало BlackSprut BlackSprut onion site
BlackSprut darknet ссылка BlackSprut2web com
BlackSprut официальный сайт k2tor
BlackSprut зеркало BlackSprutdarknet top
сайт BlackSprut тор
ссылка на БлекСпрут тор BlackSprut 7 one
BlackSprut клирнет зеркало 2kmp org
БлекСпрут ссылка BlackSprut zerkalo
BlackSprut ссылка 2krnk biz
BlackSprut ссылка BlackSprut7 one
актуальное зеркало BlackSprut 2kmp org
БлекСпрут зеркало BlackSprut one com
BlackSprut ссылка onion 2kmp org
BlackSprut ссылка onion 2kmp vip
площадка BlackSprut ссылка
рабочая ссылка на БлекСпрут BlackSprut 7 one
BlackSprut зеркало 2BlackSprut click
BlackSprut ссылка тор BlackSprut2web com
BlackSprut ссылка зеркало vk2
актуальное зеркало BlackSprut BlackSprut onion site
БлекСпрут ссылка BlackSprut zerkalo xyz
BlackSprut сайт официальный 2kmp org
BlackSprut зеркало 2krnk biz
BlackSprut casino официальный сайт
BlackSprut ссылка BlackSprutdarknet top
BlackSprut официальные зеркала vk3
BlackSprut market ссылка BlackSprut2web com
BlackSprut darknet ссылка тор BlackSprut2web com
BlackSprut ссылка тор BlackSprut one com
BlackSprut darknet зеркала BlackSprut2web com
БлекСпрут зеркало BlackSprut clear com
BlackSprut darknet market ссылка BlackSprut2web com
BlackSprut сайт 2krnk biz
BlackSprut зеркало dzen
БлекСпрут ссылка тор BlackSprut one com
BlackSprut зеркало тор 2kmp org
BlackSprut зеркало BlackSprutonion site
BlackSprut ссылка онион
BlackSprut сайт tor
актуальное зеркало BlackSprut BlackSprut zerkalo
BlackSprut официальный сайт vk2
BlackSprut ссылка зеркало 2kmp org
актуальное зеркало BlackSprut BlackSprut zerkalo xyz
сайт BlackSprut onion
рабочее зеркало БлекСпрут BlackSprut 7 one
БлекСпрут сайт ссылка BlackSprut one com
BlackSprut darknet market зеркало BlackSprut2web com
BlackSprut ссылка тор tor wiki online
БлекСпрут зеркало тор BlackSprut one com
BlackSprut официальный сайт k2tor online
BlackSprut ссылка зеркало vk2 pro
BlackSprut darknet ссылка тор 2BlackSprut click
ссылка на БлекСпрут тор BlackSprut clear com
сайт онион BlackSprut
БлекСпрут сайт зеркало BlackSprut 7 one
BlackSprut зеркало v5tor cfd
BlackSprut darknet ссылка тор 2krnk biz
BlackSprut сайт dzen
BlackSprut оригинальная ссылка
BlackSprut ссылка dzen
сайт БлекСпрут тор BlackSprut one com
BlackSprut ссылка BlackSprutonion site
BlackSprut официальные зеркала k2tor
BlackSprut tor ссылка онлайн
BlackSprut ссылка v5tor cfd
BlackSprut ссылка на сайт тор
BlackSprut сайт kr2web in
настоящий сайт BlackSprut
BlackSprut ссылка зеркало BlackSprut2web com
BlackSprut зеркало тор BlackSprut7 one
BlackSprut зеркало рабочее 2kmp org
ссылка на BlackSprut 2kmp org
BlackSprut официальный сайт vk3
BlackSprut ссылка зеркало BlackSprut 7 one
BlackSprut onion ссылка tor wiki online
BlackSprut вход на сайт
BlackSprut зайти на сайт
BlackSprut сайт BlackSprutdarknet top
БлекСпрут зеркало BlackSprut zerkalo xyz
BlackSprut ссылка тор 2BlackSprut click
БлекСпрут вход ссылка BlackSprut 7 one
BlackSprut магазин ссылка
BlackSprut darknet market ссылка тор BlackSprut2web com
БлекСпрут сайт ссылка BlackSprut clear com
BlackSprut даркнет зеркало 2kmp org
BlackSprut ссылка зеркало официальный сайт 2kmp org
BlackSprut darknet market ссылка BlackSprut7 one
BlackSprut зеркало 2 фан
BlackSprut darknet ссылка тор v5tor cfd
BlackSprut darknet market ссылка тор 2krnk biz
BlackSprut зеркало рабочее BlackSprutonion site
BlackSprut зеркало ссылка онлайн BlackSprut2web com
BlackSprut ссылка зеркало 2BlackSprut click
BlackSprut ссылка store
BlackSprut зеркало online
BlackSprut актуальные ссылки 2kmp org
прямая ссылка на BlackSprut
BlackSprut оф сайт
BlackSprut официальный сайт vk3 pro
сайт BlackSprut отзывы
BlackSprut darknet зеркала v5tor cfd
BlackSprut зеркало рабочее BlackSprut2web com
BlackSprut darknet market ссылка 2krnk biz
BlackSprut 10 сайт
BlackSprut onion официальный сайт
сайт БлекСпрут тор BlackSprut clear com
BlackSprut darknet ссылка 2krnk biz
BlackSprut ссылка тор 2krnk biz
BlackSprut актуальная ссылка onion
BlackSprut сайт vk2 pro
БлекСпрут площадка ссылка BlackSprut 7 one
BlackSprut сайт BlackSprut2web com
BlackSprut зеркало форум
БлекСпрут зеркало тор BlackSprut clear com
BlackSprut даркнет зеркало BlackSprutonion site
BlackSprut darknet market ссылка 2BlackSprut click
BlackSprut новая ссылка
BlackSprut официальный сайт vk2 pro
BlackSprut зеркало 2 fun
BlackSprut официальные зеркала vk3 pro
BlackSprut офф сайт
BlackSprut сайт даркнет
БлекСпрут ссылка BlackSprut BlackSprut2web com
ссылка на БлекСпрут тор BlackSprut 9 one
BlackSprut сайт анонимных покупок vtor run
BlackSprut darknet market зеркало 2BlackSprut click
BlackSprut darknet market ссылка shkafssylka ru
BlackSprut ссылка torbazaw com
BlackSprut форум ссылка
площадка БлекСпрут ссылка BlackSprut clear com
сайт BlackSprut darknet BlackSprut2web com
BlackSprut зеркало рабочее 2BlackSprut click
BlackSprut зеркало ссылка онлайн 2BlackSprut click
BlackSprut ссылка tor BlackSprut one com
BlackSprut casino официальный сайт BlackSprut casino xyz
BlackSprut сайт 2BlackSprut click
BlackSprut ссылка tor официальный сайт
BlackSprut darknet официальный сайт vtor run
BlackSprut зеркало тор BlackSprut2web com
БлекСпрут онион ссылка BlackSprut one com
BlackSprut tоr зеркало BlackSprut2web com
BlackSprut актуальные зеркала BlackSprutonion site
BlackSprut зеркало market pw
как пополнить сайт БлекСпрут BlackSprut one com
оригинальный сайт БлекСпрут BlackSprut one com
топ сайтов mega BlackSprut black sprut
BlackSprut 2 ссылка
BlackSprut darknet market ссылка v5tor cfd
BlackSprut рабочая ссылка onion
BlackSprut ссылка vk
БлекСпрут сайт ссылка BlackSprut 11
BlackSprut зеркало рабочее 2krnk biz
BlackSprut зеркало рабочее market
рабочее зеркало БлекСпрут BlackSprut clear com
BlackSprut актуальные ссылки BlackSprutonion site
BlackSprut официальные ссылки BlackSprutdarknet top
BlackSprut сайт официальный BlackSprutonion site
BlackSprut darknet официальный сайт BlackSprut2web com
BlackSprut официальный сайт оригинал вход
рабочие ссылки BlackSprut для компа
рабочее зеркало БлекСпрут BlackSprut darknet top
BlackSprut onion ссылка BlackSprutdarknet top
BlackSprut ссылка на сайт vpn
ссылка на BlackSprut торговая площадка
razer BlackSprut сайт
BlackSprut вход на сайт BlackSprut one com
даркнет официальный сайт BlackSprut darknet
БлекСпрут сайт BlackSprut ssylka online
сайт БлекСпрут через тор BlackSprut one com
BlackSprut зеркало рабочее тг
BlackSprut зеркало тор BlackSprutonion site
BlackSprut официальный сайт зеркало 2krnk biz
BlackSprut ссылка зеркало официальный BlackSprut2web com
BlackSprut зеркало ссылка онлайн BlackSprutweb one
BlackSprut ссылка зеркало BlackSprutweb one
BlackSprut darknet market ссылка тор 2BlackSprut click
BlackSprut ссылка BlackSprutweb one
BlackSprut ссылка тор BlackSprutdarknet top
BlackSprut casino зеркало BlackSprut casino xyz
BlackSprut darknet market зеркало v5tor cfd
BlackSprut сайт зеркала BlackSprut2web com
сайт БлекСпрут BlackSprut darknet top
BlackSprut клир ссылка
площадка БлекСпрут ссылка BlackSprut one com
kit BlackSprut официальный сайт
ссылка на магазин БлекСпрут BlackSprut one com
Reed Dresdner says:
In summary, the digital age has undeniably reshaped how people connect intimately,
Shay Verco says:
come by the whole kit is dispassionate, I advise, people you will not be remorseful over! Everything is fine, as a result of you. The whole works, thank you. Admin, credit you. Tender thanks you for the cyclopean site.
Because of you very much, I was waiting to come by, like on no occasion in preference to!
go for wonderful, caboodle works distinguished, and who doesn’t like it, believe yourself a goose, and dote on its percipience!
Kassandra Hinojosa says:
buy the whole kit is detached, I apprise, people you intent not be remorseful over! The entirety is sunny, as a result of you. The whole shebang works, blame you. Admin, thank you. Acknowledge gratitude you as a service to the cyclopean site.
Appreciation you deeply much, I was waiting to believe, like in no way previously!
accept wonderful, everything works distinguished, and who doesn’t like it, believe yourself a goose, and affaire de coeur its brain!
Isabelle Getz says:
corrupt everything is cool, I apprise, people you will not cry over repentance! Everything is critical, as a result of you. The whole shebang works, thank you. Admin, thanks you. Thank you for the great site.
Because of you deeply much, I was waiting to believe, like on no occasion rather than!
go for super, the whole shooting match works great, and who doesn’t like it, corrupt yourself a goose, and dote on its perception!
поддоны в душевой уголок says:
Центр душевых кабин предлагает широкий ассортимент качественных товаров это
https://centr-dush-kabin.ru/dushevye-kabiny-i-ograzhdenija/dushevye-ugolki/ для ванной комнаты. Мы сотрудничаем с ведущими производителями и предоставляем гарантию качества на все товары. Наши опытные специалисты помогут вам выбрать подходящую душевую кабину и проконсультируют по любым вопросам.
У нас вы найдёте всё необходимое для создания идеальной ванной комнаты.
Наши преимущества:
– высокое качество товаров;
– доступные цены;
– большой выбор;
– профессиональные консультации;
– гарантия качества;
– быстрая доставка и установка.
Не упустите возможность обновить вашу ванную комнату с помощью наших душевых кабин! Заходите на наш сайт, чтобы найти свою идеальную душевую кабину!
Margene Follett says:
юридический адрес для ооо в москве
Jonna Collings says:
It’s an remarkable piece of writing in support of all the online viewers; they will get advantage from it I am sure.
Emil Bodiford says:
corrupt everything is unflappable, I advise, people you will not regret! Everything is critical, sometimes non-standard due to you. The whole works, say thank you you. Admin, thank you. Appreciation you on the great site.
Thank you decidedly much, I was waiting to believe, like on no occasion in preference to!
accept super, the whole shooting match works great, and who doesn’t like it, buy yourself a goose, and love its thought!
Adriene Zinke says:
acquire the whole kit is unflappable, I apprise, people you transfer not cry over repentance! The whole is sunny, sometimes non-standard due to you. The whole works, say thank you you. Admin, thanks you. Appreciation you an eye to the great site.
Credit you very much, I was waiting to believe, like in no way previously!
go for super, everything works spectacular, and who doesn’t like it, swallow yourself a goose, and attachment its thought!
Bridgett Frizzell says:
come by everything is detached, I advise, people you will not feel! The entirety is critical, as a result of you. The whole shebang works, blame you. Admin, credit you. Thank you as a service to the vast site.
Credit you damned much, I was waiting to come by, like never rather than!
accept super, all works great, and who doesn’t like it, believe yourself a goose, and affaire de coeur its thought!
prestige city indirapuram says:
Discover Prestige Indirapuram, a sprawling 63-acre township with 80% open space. Enjoy park-facing apartments and direct access from the Delhi Meerut Expressway. Benefit from unmatched connectivity, just 15 minutes from Akshardham Temple.
Gregorio Masterson says:
come by the whole shooting match is detached, I advise, people you transfer not regret! The whole kit is bright, thank you. The whole shebang works, blame you. Admin, as a consequence of you. Tender thanks you for the great site.
Thank you very much, I was waiting to come by, like on no occasion rather than!
buy wonderful, everything works horrendous, and who doesn’t like it, believe yourself a goose, and dote on its perception!
best Gold ira rollover companies says:
Yeah bookmaking this wasn’t a high risk determination outstanding post!
gold ira company ratings says:
of course like your website but you need to take a look at the spelling on several of your posts. Many of them are rife with spelling issues and I in finding it very bothersome to tell the reality on the other hand I will certainly come again again.
https://ramblermails.com/ says:
в связи с тем, что гаджеты заняли первое место в быту человека, помогая ему не только лишь в учебе, службе, но и в проведении досуга,.
My web-site :: https://ramblermails.com/
Herman Macgeorge says:
Заказать прогоны хрумером, я вхожу в мир,
где цифры и алгоритмы танцуют в унисон,
создавая уникальную симфонию из данных.
Этот мощный инструмент, словно архитектор,
строит многоуровневые мосты между сайтами,
ведя их к вершинам поисковых систем.
Каждый запуск — это не просто процесс; это кропотливый труд,
поиск скрытых возможностей
и открытие новых горизонтов в вашем бизнесе
заказать прогоны хрумером и гса можно у нас ===> https://t.me/bazixrumer/
мы работаем 24/7 пишите ответим на любые вопросы
Z3_NYFcXU7
Gretchen Mejia says:
Do you mind if I quote a few of your articles as long as I provide credit and sources back to your weblog? My website is in the very same niche as yours and my users would certainly benefit from a lot of the information you provide here. Please let me know if this alright with you. Regards!
Buford Ewen says:
Every weekend i used to pay a visit this site, because i wish for enjoyment, since this this site conations genuinely fastidious funny data too.
Salvador Newby says:
Hey I am so glad I found your blog, I really found you by error, while I was browsing on Digg for something else, Nonetheless I am here now and would just like to say kudos for a remarkable post and a all round enjoyable blog (I also love the theme/design), I don’t have time to read through it all at the minute but I have saved it and also added your RSS feeds, so when I have time I will be back to read much more, Please do keep up the superb jo.
Annett Uribe says:
I was wondering if you ever considered changing the layout of your website? Its very well written; I love what youve got to say. But maybe you could a little more in the way of content so people could connect with it better. Youve got an awful lot of text for only having 1 or 2 pictures. Maybe you could space it out better?
Miquel Wearne says:
Glad to be one of several visitants on this awe inspiring website :D.
Muoi Fredericksen says:
Just wish to say your article is as astonishing. The clarity in your post is just excellent and i can assume you are an expert on this subject. Well with your permission allow me to grab your feed to keep up to date with forthcoming post. Thanks a million and please keep up the enjoyable work.
Priscilla West says:
This website was… how do I say it? Relevant!! Finally I have found something that helped me. Thanks!
Edison Curley says:
I loved as much as you will receive carried out right here. The sketch is tasteful, your authored material stylish. nonetheless, you command get bought an impatience over that you wish be delivering the following. unwell unquestionably come more formerly again since exactly the same nearly very often inside case you shield this hike.
ira gold companies says:
I’ve been absent for a while, but now I remember why I used to love this web site. Thank you, I will try and check back more often. How frequently you update your site?
Mitchell Trent says:
Зарегистрироваться на сайте:
– Перейдите на официальный сайт “Калино Вулкан”.
– Нажмите на кнопку “Регистрация” или “Зарегистрироваться”.
– Заполните все необходимые поля, включая имя, адрес электронной почты и пароль.
– Подтвердите регистрацию, следуя инструкциям на экране.
csaefe
Allison Baecker says:
Hello there, I believe your blog could possibly be having internet browser compatibility problems. Whenever I look at your blog in Safari, it looks fine however when opening in IE, it has some overlapping issues. I simply wanted to give you a quick heads up! Apart from that, great blog!
gratisafhalen.be says:
You made several fine points there. I did a search on the topic and found mainly persons will consent with your blog.
take says:
corrupt the whole shebang is detached, I advise, people you
will not be remorseful over! The whole is bright, sometimes non-standard due to you.
Everything works, say thank you you. Admin, thank you. Acknowledge
gratitude you an eye to the tremendous site.
Because of you decidedly much, I was waiting to take, like not in any degree before!
accept super, everything works spectacular, and who doesn’t like it, swallow yourself a goose, and love its perception!
ai porn says:
A motivating discussion is definitely worth comment.
I do believe that you should write more on this topic, it may not be a taboo matter but usually folks don’t speak about these topics.
To the next! Kind regards!!
Estelle Talbert says:
It’s great that you are getting ideas from this paragraph as well as from our dialogue made at this time.
Cassie Lantz says:
I loved as much as you will receive carried out right here. The sketch is tasteful, your authored subject matter stylish. nonetheless, you command get bought an shakiness over that you wish be delivering the following. unwell unquestionably come more formerly again as exactly the same nearly a lot often inside case you shield this hike.
PM says:
corrupt the whole shooting match is dispassionate, I encourage, people you command not regret!
The whole kit is fine, sometimes non-standard due to you.
The whole shebang works, blame you. Admin, thanks
you. Thank you an eye to the great site.
Thank you damned much, I was waiting to believe, like
not in any degree in preference to!
steal wonderful, the whole shooting match works distinguished, and who doesn’t like
it, corrupt yourself a goose, and attachment its brain!
"https://projectblueberryserver.com/index.php/1x-slots-brasil.com_31H" says:
O site **1x Slots Brasil** oferece uma experiência de jogo online única, com uma vasta gama de slots, jogos de mesa e promoções exclusivas. Se você está à procura de diversão e a oportunidade de ganhar grandes prêmios, 1x Slots é a plataforma ideal para você.
### Vantagens de jogar na 1x Slots Brasil
1. **Variedade de jogos**: O site apresenta uma extensa coleção de jogos de slots de diferentes temas, incluindo jogos clássicos de frutas, slots de vídeo, e slots com jackpots progressivos. Além disso, você pode desfrutar de jogos de mesa como roleta, blackjack e pôquer.
2. **Bônus e promoções**: Na 1x Slots, os novos jogadores recebem generosos bônus de boas-vindas, e os jogadores recorrentes podem aproveitar promoções regulares, cashback e rodadas grátis. O sistema de recompensas permite acumular pontos e trocar por prêmios exclusivos.
3. **Interface amigável**: O site é projetado para oferecer uma navegação fácil e intuitiva, permitindo que os jogadores encontrem rapidamente seus jogos favoritos e acessem promoções sem complicações.
4. **Segurança e confiabilidade**: A 1x Slots Brasil utiliza as mais avançadas tecnologias de segurança para garantir que suas informações pessoais e financeiras estejam sempre protegidas. Todos os jogos são auditados para garantir justiça e transparência.
### Como começar
É muito simples começar a jogar no **1x Slots Brasil**. Basta fazer um cadastro rápido no site, escolher seu método de pagamento preferido e fazer seu primeiro depósito. Você estará pronto para mergulhar no mundo emocionante dos jogos de cassino, aproveitando todas as oportunidades de diversão e ganhos.
### Suporte ao cliente
Se surgir qualquer dúvida, a equipe de suporte está sempre pronta para ajudar, disponível 24/7 por meio de chat ao vivo ou e-mail. O objetivo da **1x Slots** é garantir que você tenha uma experiência de jogo tranquila e prazerosa.
Explore agora a incrível seleção de jogos e promoções em **1x Slots Brasil** e descubra por que tantos jogadores escolhem nossa plataforma para diversão e grandes chances de ganhar. Não perca a oportunidade de participar deste mundo de entretenimento e recompensas!
https://stairways.wiki/wiki/User:WadeDurbin
ai porn says:
No matter if some one searches for his essential thing, therefore
he/she desires to be available that in detail, thus that thing is maintained over here.
Lettie Buss says:
A person necessarily lend a hand to make significantly posts I might state. This is the first time I frequented your website page and thus far? I amazed with the research you made to make this particular publish incredible. Wonderful job!
blow (blew blown) says:
Cocaine comes from coca leaves organize in South America.
While once used in stock medicine, it’s now
a banned meaning right to its dangers. It’s highly addictive, unrivalled to vigorousness risks like spunk attacks, deranged disorders, and severe addiction.
example says:
buy everything is cool, I encourage, people you transfer not regret!
The whole kit is sunny, as a result of you.
The whole kit works, thank you. Admin, thanks you. Appreciation you for the vast site.
Thank you decidedly much, I was waiting to take, like never before!
go for wonderful, everything works horrendous, and who doesn’t like it,
buy yourself a goose, and attachment its brain!
bare says:
Cocaine comes from coca leaves bring about in South America.
While split second used in well-known medicine, it’s now a banned core rightful to its dangers.
It’s warmly addictive, leading to healthiness risks like
heart attacks, conceptual disorders, and glowering addiction.
authority says:
buy the whole shooting match is detached, I encourage, people you intent not feel!
The whole kit is fine, thank you. The whole shebang works, show one’s gratitude you.
Admin, thanks you. Thank you as a service to the tremendous site.
Because of you damned much, I was waiting to believe, like on no occasion rather
than!
steal super, everything works distinguished, and who
doesn’t like it, buy yourself a goose, and attachment its thought!
star says:
buy the whole kit is cool, I apprise, people you intent not feel!
The whole kit is fine, as a result of you.
The whole kit works, blame you. Admin, thank you.
Acknowledge gratitude you as a service to the cyclopean site.
Because of you deeply much, I was waiting to come by, like
never previously!
go for super, all works spectacular, and who doesn’t like it, corrupt yourself a
goose, and affaire de coeur its thought!
beast says:
Cocaine comes from coca leaves establish in South
America. While periodically utilized in traditional
cure-all, it’s now a banned core right to its dangers.
It’s highly addictive, unrivalled to vigorousness
risks like pump attacks, mental disorders, and merciless addiction.
bizarre says:
Cocaine comes from coca leaves organize in South America. While periodically cast-off in stock
drug, it’s in this day a banned significance rightful to its dangers.
It’s highly addictive, pre-eminent to vigorousness risks like heart
attacks, conceptual disorders, and mean addiction.
Larae Lajoie says:
Glad to be one of the visitants on this awing site :D.
Georgetta Fisken says:
Simply want to say your article is as astonishing. The clarity in your post is simply great and i could assume you are an expert on this subject. Well with your permission allow me to grab your RSS feed to keep up to date with forthcoming post. Thanks a million and please keep up the enjoyable work.
Clay Le Messurier says:
Приветствуем вас на нашем веб-сайте! Здесь вы найдёте всё необходимое для успешного управления своими финансами. Мы предлагаем широкий спектр финансовых продуктов, которые помогут вам достичь ваших целей и обеспечить стабильность в будущем.
В нашем ассортименте представлены различные виды банковских продуктов, инвестиции, страхование, кредиты и многое другое. Мы постоянно обновляем нашу базу данных, чтобы вы всегда были в курсе последних тенденций и инноваций на финансовом рынке.
Наши специалисты помогут вам выбрать наиболее подходящий продукт, учитывая ваши индивидуальные потребности и предпочтения. Мы предоставляем консультации и рекомендации, чтобы вы могли принять обоснованное решение и избежать возможных рисков.
Не упустите возможность воспользоваться нашими услугами и откройте для себя мир финансовых возможностей! Заходите на наш сайт, ознакомьтесь с каталогом продуктов и начните свой путь к финансовой стабильности прямо сейчас!
Условия и тарифы
вован казино отзывы says:
Casino промокод
Современные игры в увлекательных заведениях предлагают множество возможностей. Каждый игрок ищет выгоду, которая сделает процесс еще более привлекательным. И на этом рынке ключевую роль играют специальные предложения и подарки, увеличивающие шансы на успех. Именно такие возможности открывают двери к новым ощущениям и выигрышам.
Получение дополнительных бонусов – это не просто приятно, это еще и выгодно. Льготы могут варьироваться от бездепозитных предложений до щедрых стартовых пакетов. Такой подход позволяет игрокам не только поглубже погрузиться в атмосферу развлечений, но и почувствовать поддержку. Специализированные предложения могут существенно улучшить общий опыт, позволяя раскрыть весь потенциал игры.
Иногда достаточно всего лишь наличия уникальной комбинации символов на экране, чтобы стать обладателем внушительного приза, но как быть тем, кто только начинает свой путь в этом мире увлечений? Им на помощь приходят эксклюзивные выгодные предложения, которые увеличивают шансы на получение осмысленных выигрышей, создавая не только положительные эмоции, но и добавляя азарт в общую атмосферу.
Помимо этого, бонусы помогают изучить тонкости множества игр. Весь процесс становится более увлекательным и доступным, что, безусловно, привлекает внимание новичков и опытных игроков. Многообразие вариантов создает уникальную игровую среду. Каждый найдет что-то для себя, открывая новые горизонты в области развлечений.
Таким образом, возможности, предлагаемые различными заведениями, – это настоящая находка для любого ценителя азартных игр. Внимательное отношение к поиску интересных предложений делает игровой опыт более насыщенным и запоминающимся. Не упустите шанс воспользоваться выгодными предложениями и погрузиться в мир ярких эмоций прямо сейчас!
Топ-5 мест для поиска бонусов и акций
Виртуальные клубы предлагают различные льготы и интересные предложения для новых и постоянных игроков. Эти заманчивые предложения могут значительно увеличить шансы на выигрыш. Зачем упускать возможность получить дополнительные средства или фриспины? Следует знать, где и как искать эти выгодные предложения. Если вы хотите максимизировать свой опыт игры, ознакомьтесь с приведенными ниже источниками.
Первый и, пожалуй, самый простой способ – это, конечно, официальный сайт заведения. Многие площадки регулярно обновляют разделы с акциями и предложениями. Заходите в раздел «акции» или «бонусы» на сайте, чтобы быть в курсе последних новинок. Как правило, за дополнительной информацией стоит обращаться в службу поддержки, поскольку они могут предоставить инсайдерскую информацию.
Другим источником полезных данных являются специализированные форумы. На таких ресурсах игроки активно обмениваются опытом и делятся находками. Вы можете узнать о лучших предложениях и тактиках использования бонусов. Имейте в виду, информация от реальных игроков часто бывает более достоверной, чем реклама, размещенная на официальных ресурсах. Поэтому чтение отзывов может существенно помочь вам в поиске идеальных предложений.
Не забывайте также проверять социальные сети. Многие заведения используют платформы, такие как Instagram или Facebook, чтобы информировать своих клиентов о текущих акциях. Следя за официальными страницами, вы сможете быть в курсе всех новостей, а иногда даже принимать участие в эксклюзивных конкурсах. Виртуальные клубы часто запускают временные предложения, и пропустить их можно очень легко.
Четвертым источником информации могут стать блоги и каналы на YouTube, посвященные игровым вопросам. Авторитетные блогеры регулярно рассказывают о лучших местах для игры и делятся эксклюзивными кодами. Они могут предоставить детальный анализ и советы по использованию бонусов, чтобы вы могли извлечь максимум из своих вложений. Эта информация может оказаться очень полезной, если вы ищете проверенные источники для получения преимуществ.
Наконец, подписки на информационные рассылки тоже могут сыграть свою роль. Подписавшись на новостные письма от заведения, вы получите актуальные предложения и новости прямо на свою электронную почту. Это удобный способ оставаться в курсе последних акций и не упустить выгодные возможности. Плюс к этому, нередко заведения предлагают подписчикам эксклюзивные предложения. Это может стать вашей золотой жилой, если вы действительно заинтересованы в игре.
Топ-5 мест для поиска выгодных предложений
Существует множество ресурсов, где можно найти заманчивые предложения для азартных площадок. Такая информация может помочь при выборе, сделать игру более увлекательной и выгодной. Однако важно знать, как и где искать подобные возможности. Каждый ищет что-то свое, и подходы у всех разные.
Первым источником информации о приятных предложениях являются специализированные сайты. Эти платформы собирают лучшие предложения со всего интернета. На них, как правило, можно найти актуальные данные и заказать их рассылку. Многие из них ведут блоги с рекомендациями и полезными советами. Это хороший способ быть в курсе свежих акций и новинок.
Вторым важным местом являются официальные ресурсы самого заведения. Если у вас уже есть любимая площадка, зайдите в их раздел акций. Часто кафе и заведения анонсируют свои выгодные предложения именно там. Иногда можно подписаться на рассылку, чтобы получать информацию первыми. Это позволит быть на шаг впереди остальных игроков.
Социальные сети также являются отличным источником информации. Множество заведения активно ведёт свои страницы и делится новостями с подписчиками. В таких профилях часто публикуют эксклюзивные предложения и конкурсы. Следите за новыми публикациями и участвуйте в мероприятиях. Это может привести к новым возможностям.
Источник|Описание
Специализированные сайты|Сборники выгодных предложений, советы и новости по азартной тематике.
Официальные ресурсы|Информация об акциях и предложениях прямо от заведения.
Социальные сети|Эксклюзивные предложения и конкурсы, взаимодействие с подписчиками.
Не забывайте о форумах и сообществах. Это площадки, где опытные игроки делятся своими находками. Можно получить полезные советы и узнать, где сейчас лучший выбор. Взаимодействуя с другими людьми, вы сможете расширить свои горизонты и увидеть другие подходы к игре.
Завершая обзор, стоит отметить, что поиски особых предложений не должны вызывать неприятностей. Главное – действовать рационально и не торопиться. Такие ресурсы сделают вашу игру более разнообразной и увлекательной, принося новые эмоции и опыт.
https://derbenev-centr.ru/
admiral x скачать says:
Бездепозитный бонус онлайн казино
Мир азартных игр необычайно разнообразен и полон неожиданных возможностей. Многие участники хотят попробовать свои силы, не рискуя собственными средствами. На настоящий момент есть варианты, позволяющие ознакомиться с игрой и шансами, не внося при этом стартовый вклад. Это идеальное решение для тех, кто только делает первые шаги в азартной индустрии.
В основном, такие предложения помогают новичкам получить ощутимый опыт. Вместе с тем, они служат и более опытным игрокам, позволяя протестировать новые игры без тайных затрат. Приятно, когда у вас есть возможность исследовать уникальные развлечения, не опасаясь потери, так как имеется шанс насладиться атмосферой без лишних трат.
Хотелось бы отметить, что такая щедрость со стороны платформ создаёт доверие и увеличивает интерес. При наличии возможности попробовать что-то новое, многие становятся более уверенными и заинтересованными. Это, в свою очередь, может привести к дальнейшему изучению и погружению в такие платформы, привнося элемент развлечения и переживания. Интересно, что многие игроки начинают свой путь с такого рода предложений, и это становится для них стартовой площадкой на долгом пути в мир азартных игр.
Кроме того, стоит обратить внимание на условия, которые часто сопровождают такие акции. Изучение правил и требований поможет избежать недоразумений и сделать процесс ещё более увлекательным. А погружение в атмосферу развлечений, полной сюрпризов и волнений, всегда привлекает внимание истинных ценителей. Таким образом, возможность развлечься и испытать свою удачу приобретает совершенно новый смысл.
Что такое бездепозитный поощрительный подарок в игорном заведении?
Игроки могут получить возможность делать ставки, не тратя свои деньги. Вместо этого им предоставляются определенные средства или вращения на автоматах. Это помогает понять разнообразие игровых опций, не рискуя при этом собственными сбережениями. Но, конечно, существуют определенные условия, с которыми необходимо ознакомиться.
– Часто бывает установлен лимит на сумму выигрыша.
– Необходимо выполнить требования по ставкам.
– В некоторых случаях доступен срок действия предложения.
Таким образом, важно всегда читать условия использования таких акций. Только так можно избежать неприятных сюрпризов и наслаждаться процессом игры в полную силу. Даже если условия кажутся сложными или запутанными, все же есть шанс выиграть, не рискуя при этом реальными деньгами.
Таким образом, подобные привлекательные предложения действительно могут оказаться весьма выгодными для игроков. Некоторые заведения предлагают их только новым пользователям, в то время как другие открыты для всех. Более того, постоянное использование мер поощрения может значительно увеличить шансы на успех в увлекательном игровом процессе.
Что такое предложение без первоначального взноса?
Предложения без необходимости вносить стартовый депозит стали популярным инструментом в мире азартных игр. Они позволяют игрокам оценить платформу без финансовых рисков. Множество пользователей привлекаются возможностью опробовать различные игры. Это значительно упрощает процесс знакомства с новым ресурсом. Кроме того, такие инициативы способствуют расширению клиентской базы.
Основная идея заключается в том, чтобы предоставить шанс попробовать услуги заведения, не требуя дополнительных затрат. Игроки могут активно тестировать разные виды развлечений, не опасаясь потерять деньги. Эти опции становятся все более актуальными, особенно на фоне растущей конкуренции между платформами. Поэтому, выбирая место для досуга, стоит обратить внимание на условия, предлагаемые без начальных вложений.
Плюсы и минусы предложений без вложений
Как и в любой другой области, у таких предложений есть свои достоинства и недостатки. Давайте рассмотрим некоторые из них.
– Плюсы:
– Возможность без риска попробовать различные игры.
– Без затрат на стартовом этапе можно оценить качество сервиса.
– Часто предоставляемые фриспины позволяют выиграть без собственных вложений.
– Приятный способ привлечь новых клиентов и удержать уже существующих.
– Недостатки:
– Часто невыгодные условия по возврату средств.
– Лимиты на максимальный выигрыш, как правило, достаточно низкие.
– Ограниченное время для использования предоставленных средств.
– Может отсутствовать поддержка популярных игр.
Таким образом, предложения без первых вложений открывают новые горизонты для любителей азартных игр. Они создают возможности для получения нового опыта. Тем не менее, прежде чем воспользоваться таким шансом, важно учитывать все аспекты, чтобы не столкнуться с неприятными сюрпризами. Знакомство с условиями и правилами – залог успешного времяпрепровождения.
https://shanstovari.ru/
казино болливуд says:
Как вывести бонус онлайн казино
Современные развлечения позволяют игрокам испытать удачу в различных азартных играх. Этот процесс может приносить не только удовольствие, но и неплохие деньги. Однако многие сталкиваются с вопросом: каким образом можно внести свои нажитые средства на счет? Важно разобраться в тонкостях, чтобы сохранить свои выигрыши.
Существует множество нюансов, требующих внимания. Каждый участник ставит перед собой цель, когда погружается в этот увлекательный мир. Но для получения желаемого результата нужно понимать правила игры, а также условия, выставленные учреждением. Понятие легальности и безопасности оказывается на первом плане, поскольку это влияет на уровень доверия и качества предоставляемых услуг.
Итак, ключевым элементом любой стратегии являются множество различных ресурсов, которые помогут освежить знания и прояснить ситуационные вопросы. Важно научиться различать подходы и понимать требования, изложенные в условиях использования. Виртуальные клубы отличаются разнообразием, и это само по себе создает пространство для изучения и самосовершенствования.
Увлекаясь азартом, не забудьте об ответственном подходе к игре. Необходимо заранее ознакомиться с условиями, которые различаются среди заведений, чтобы избежать неприятных сюрпризов в будущем. Наличие правильной информации и умение ориентироваться в правилах позволит легко достигать поставленных целей. Каждому игроку следует помнить о своих финансовых возможностях и четко фиксировать границы.
Финансовая грамотность в этом контексте также играет важную роль. Умение планировать свои расходы и следовать установленному бюджету поможет не только улучшить игровую стратегию, но и защитить себя от нежелательных последствий. Таким образом, взвешенные решения становятся краеугольным камнем успеха в любой азартной деятельности. Удачи в ваших начинаниях и помните–оставайтесь внимательными к нюансам!
Что нужно знать о коэффициентах выплат
Коэффициенты выплат обычно выражаются в процентах и могут варьироваться в зависимости от конкретной игры. Они показывают, какова вероятность выиграть в заданной ситуации. Например, коэффициент 95% означает, что за каждую ставку в 100 единиц игрок может ожидать вернуть 95 единиц, однако важно помнить, что это значение является усреднённым и не гарантирует выигрыш в каждой игре. Конечно, понимание этого механизма предоставляет возможность более осознанного подхода к выбору игр.
Кроме того, стоит отметить, что разные игры имеют разные коэффициенты. От видеослотов до настольных игр – каждая категория имеет свои уникальные особенности. Наиболее высокие коэффициенты обычно встречаются в таких играх, как блэкджек или баккара, где стратегия значительно влияет на результат. Это уже не просто удача, а целая наука!
Выбор игр с высокими коэффициентами выплат может помочь увеличить шансы на получение прибыли и минимизировать риски. Например, изучение таблицы выплат поможет определить, какие символы наиболее выгодны и как часто они выпадают. Поэтому важно не пренебрегать этой информацией, так как она может стать ключом к успеху.
Люди, которые понимают коэффициенты и умеют выставлять свои ставки, имеют более острое чувство контроля над процессом. Однако, несмотря на все знания и стратегии, всегда необходимо помнить, что азартные игры несут в себе элементы риска. Нельзя забывать, что ни один коэффициент не может гарантировать выигрыш в каждой конкретной игре, а время от времени игроки могут сталкиваться с неудачами.
Таким образом, анализируя коэффициенты выплат и основываясь на их значениях, можно значительно увеличить шансы на успех. Однако не стоит забывать о возможности получения удовольствия от процесса, ведь игры были созданы не только для выигрыша, но и для развлечения. Умение находить баланс между анализом и удовольствием – вот что действительно важно!
Получение средств, заработанных в играх на ставках, представляет собой важный аспект, который волнует многих участников процесса. Непосредственно от выбранного метода зависит не только скорость поступления средств, но и безопасность операций. Процесс может отличаться в зависимости от платформы. Чаще всего игроки обращают внимание на удобство и надежность.
Существуют различные варианты перевода денег. Это может быть банковский перевод, электронные кошельки и даже криптовалюты. Каждый из способов имеет свои плюсы и минусы. Для удобства лучше выбирать метод, который соответствует вашему стилю. Например, электронные системы часто предлагают более быстрые транзакции.
Банковские переводы могут занять 3-7 рабочих дней, в то время как электронные портфели обеспечивают мгновенные переводы. Игрокам стоит быть внимательными к возможным комиссиям, которые могут варьироваться в зависимости от выбранного метода. Дело в том, что низкие комиссии зачастую идут в обход безопасных и надежных платежных систем, поэтому лучше не рисковать.
https://floriangeyer.ru/
комета казино партнерская программа says:
Как вывести бонус онлайн казино
Современные развлечения позволяют игрокам испытать удачу в различных азартных играх. Этот процесс может приносить не только удовольствие, но и неплохие деньги. Однако многие сталкиваются с вопросом: каким образом можно внести свои нажитые средства на счет? Важно разобраться в тонкостях, чтобы сохранить свои выигрыши.
Существует множество нюансов, требующих внимания. Каждый участник ставит перед собой цель, когда погружается в этот увлекательный мир. Но для получения желаемого результата нужно понимать правила игры, а также условия, выставленные учреждением. Понятие легальности и безопасности оказывается на первом плане, поскольку это влияет на уровень доверия и качества предоставляемых услуг.
Итак, ключевым элементом любой стратегии являются множество различных ресурсов, которые помогут освежить знания и прояснить ситуационные вопросы. Важно научиться различать подходы и понимать требования, изложенные в условиях использования. Виртуальные клубы отличаются разнообразием, и это само по себе создает пространство для изучения и самосовершенствования.
Увлекаясь азартом, не забудьте об ответственном подходе к игре. Необходимо заранее ознакомиться с условиями, которые различаются среди заведений, чтобы избежать неприятных сюрпризов в будущем. Наличие правильной информации и умение ориентироваться в правилах позволит легко достигать поставленных целей. Каждому игроку следует помнить о своих финансовых возможностях и четко фиксировать границы.
Финансовая грамотность в этом контексте также играет важную роль. Умение планировать свои расходы и следовать установленному бюджету поможет не только улучшить игровую стратегию, но и защитить себя от нежелательных последствий. Таким образом, взвешенные решения становятся краеугольным камнем успеха в любой азартной деятельности. Удачи в ваших начинаниях и помните–оставайтесь внимательными к нюансам!
Что нужно знать о коэффициентах выплат
Коэффициенты выплат обычно выражаются в процентах и могут варьироваться в зависимости от конкретной игры. Они показывают, какова вероятность выиграть в заданной ситуации. Например, коэффициент 95% означает, что за каждую ставку в 100 единиц игрок может ожидать вернуть 95 единиц, однако важно помнить, что это значение является усреднённым и не гарантирует выигрыш в каждой игре. Конечно, понимание этого механизма предоставляет возможность более осознанного подхода к выбору игр.
Кроме того, стоит отметить, что разные игры имеют разные коэффициенты. От видеослотов до настольных игр – каждая категория имеет свои уникальные особенности. Наиболее высокие коэффициенты обычно встречаются в таких играх, как блэкджек или баккара, где стратегия значительно влияет на результат. Это уже не просто удача, а целая наука!
Выбор игр с высокими коэффициентами выплат может помочь увеличить шансы на получение прибыли и минимизировать риски. Например, изучение таблицы выплат поможет определить, какие символы наиболее выгодны и как часто они выпадают. Поэтому важно не пренебрегать этой информацией, так как она может стать ключом к успеху.
Люди, которые понимают коэффициенты и умеют выставлять свои ставки, имеют более острое чувство контроля над процессом. Однако, несмотря на все знания и стратегии, всегда необходимо помнить, что азартные игры несут в себе элементы риска. Нельзя забывать, что ни один коэффициент не может гарантировать выигрыш в каждой конкретной игре, а время от времени игроки могут сталкиваться с неудачами.
Таким образом, анализируя коэффициенты выплат и основываясь на их значениях, можно значительно увеличить шансы на успех. Однако не стоит забывать о возможности получения удовольствия от процесса, ведь игры были созданы не только для выигрыша, но и для развлечения. Умение находить баланс между анализом и удовольствием – вот что действительно важно!
Получение средств, заработанных в играх на ставках, представляет собой важный аспект, который волнует многих участников процесса. Непосредственно от выбранного метода зависит не только скорость поступления средств, но и безопасность операций. Процесс может отличаться в зависимости от платформы. Чаще всего игроки обращают внимание на удобство и надежность.
Существуют различные варианты перевода денег. Это может быть банковский перевод, электронные кошельки и даже криптовалюты. Каждый из способов имеет свои плюсы и минусы. Для удобства лучше выбирать метод, который соответствует вашему стилю. Например, электронные системы часто предлагают более быстрые транзакции.
Банковские переводы могут занять 3-7 рабочих дней, в то время как электронные портфели обеспечивают мгновенные переводы. Игрокам стоит быть внимательными к возможным комиссиям, которые могут варьироваться в зависимости от выбранного метода. Дело в том, что низкие комиссии зачастую идут в обход безопасных и надежных платежных систем, поэтому лучше не рисковать.
https://hyundairazborka.ru/
ai porn says:
You’re so cool! I don’t suppose I have read through something like this before.
So good to discover somebody with some genuine thoughts on this issue.
Really.. thanks for starting this up. This site is something
that is needed on the web, someone with a
bit of originality!
Jonelle Bradfield says:
I’m truly enjoying the design and layout of your blog. It’s a very easy on the eyes which makes it much more enjoyable for me to come here and visit more often. Did you hire out a developer to create your theme? Great work!
Antonetta Bunker says:
Amazing blog! Do you have any suggestions for aspiring writers? I’m hoping to start my own site soon but I’m a little lost on everything. Would you recommend starting with a free platform like WordPress or go for a paid option? There are so many choices out there that I’m completely confused .. Any tips? Thank you!
Lin Baker says:
Your means of explaining the whole thing in this article is truly good, all can effortlessly be aware of it, Thanks a lot.
Michele Lyle says:
Awesome blog! Do you have any recommendations for aspiring writers? I’m hoping to start my own website soon but I’m a little lost on everything. Would you suggest starting with a free platform like WordPress or go for a paid option? There are so many options out there that I’m completely confused .. Any suggestions? Thank you!
Royal Villanueva says:
Great article. I am facing a few of these issues as well..
Marcel Soward says:
I went over this website and I conceive you have a lot of excellent information, saved to bookmarks (:.
Jorja Rincon says:
Hello there, I found your web site by means of Google even as looking for a similar topic, your site came up, it seems to be good. I’ve bookmarked it in my google bookmarks.
Hello there, just changed into aware of your weblog via Google, and located that it is really informative. I am going to be careful for brussels. I will be grateful for those who continue this in future. Lots of other folks shall be benefited from your writing. Cheers!
ai porn says:
This piece of writing will help the internet visitors for creating new weblog or even a blog from start to end.
house says:
buy everything is cool, I advise, people you command not feel!
The entirety is fine, as a result of you. Everything
works, thank you. Admin, as a consequence of you. Thank you an eye
to the cyclopean site.
Thank you damned much, I was waiting to believe, like not in any degree in preference to!
go for super, all works great, and who doesn’t like it, corrupt
yourself a goose, and attachment its thought!
ai porn says:
An impressive share! I have just forwarded this onto a coworker who
was doing a little homework on this. And he in fact bought me breakfast because
I discovered it for him… lol. So allow me to reword this….
Thanks for the meal!! But yeah, thanx for spending the time to discuss this matter here
on your web page.
Flossie Howland says:
We absolutely love your blog and find most of your post’s to be exactly I’m looking for. Do you offer guest writers to write content in your case? I wouldn’t mind creating a post or elaborating on a lot of the subjects you write about here. Again, awesome web log!
Muhammad Stamper says:
grupa kapitalowa
Katrice Buzzard says:
It’s hard to find educated people for this topic, but you seem like you know what you’re talking about! Thanks
Terrence Linney says:
It’s nearly impossible to find knowledgeable people in this particular topic, but you sound like you know what you’re talking about! Thanks
really says:
acquire the whole kit is cool, I encourage, people you intent not be remorseful over!
The whole is sunny, thank you. The whole works, blame you.
Admin, credit you. Tender thanks you as a service to the tremendous site.
Thank you damned much, I was waiting to buy, like on no occasion rather than!
go for super, everything works distinguished, and who
doesn’t like it, believe yourself a goose, and dote on its percipience!
Charla Chill says:
Greetings! Very useful advice within this article! It is the little changes that produce the biggest changes. Thanks a lot for sharing!
website says:
You actually reported this exceptionally well.
Holley Courtney says:
Your way of describing all in this piece of writing is truly good, all be able to without difficulty understand it, Thanks a lot.
Christopher Person says:
Some truly interesting points you have written.Aided me a lot, just what I was looking for :D.
https://triparambh.com/software-to-create-black-links-for-gambling/ says:
The film was the eighth collaboration directed by Scorsese and directed by https://triparambh.com/software-to-create-black-links-for-gambling/ Niro.
Rae Garner says:
Hey I know this is off topic but I was wondering if you knew of any widgets I could add to my blog that automatically tweet my newest twitter updates. I’ve been looking for a plug-in like this for quite some time and was hoping maybe you would have some experience with something like this. Please let me know if you run into anything. I truly enjoy reading your blog and I look forward to your new updates.
Mohamed Hyatt says:
Simply wish to say your article is as surprising. The clarity in your post is just cool and i can assume you are an expert on this subject. Fine with your permission allow me to grab your feed to keep up to date with forthcoming post. Thanks a million and please carry on the rewarding work.
Susanna Moon says:
I went over this web site and I think you have a lot of excellent information, saved to fav (:.
Lona Falls says:
I loved as much as you’ll receive carried out right here. The sketch is tasteful, your authored subject matter stylish. nonetheless, you command get bought an nervousness over that you wish be delivering the following. unwell unquestionably come further formerly again as exactly the same nearly very often inside case you shield this increase.
Nicholas Pugh says:
Thankfulness to my father who stated to me on the topic of this blog, this webpage is truly amazing.
casinocrit.pro says:
your future begins at Pauma https://casinocrit.pro/, where people really needed.
we guarantee: the most profitable compensation package in the valley!
Ferdinand Raymond says:
I am regular visitor, how are you everybody? This post posted at this web site is genuinely nice.
18862 says:
он имеет профиль средней высоты – от 35 мм (НС35) до 44 https://maps.at.ua/forum/65-7825-1#https://maps.at.ua/forum/65-7825-1 мм (НС44).
Gene Mitten says:
Hello it’s me, I am also visiting this site regularly, this web page is really good and the visitors are in fact sharing pleasant thoughts.
Niklas Welsh says:
Simply want to say your article is as astonishing. The clarity in your post is just cool and i could assume you are an expert on this subject. Well with your permission let me to grab your feed to keep up to date with forthcoming post. Thanks a million and please carry on the enjoyable work.
best precious metals ira says:
Good respond in return of this difficulty with real arguments and explaining everything about that.
finish says:
buy the whole shebang is unflappable, I guide,
people you intent not feel! Everything is sunny, tender thanks you.
The whole shebang works, thank you. Admin, thanks you.
Acknowledge gratitude you on the vast site.
Thank you damned much, I was waiting to come by, like in no
way in preference to!
accept wonderful, the whole shooting match works spectacular, and who
doesn’t like it, believe yourself a goose, and love its percipience!
like says:
buy the whole kit is unflappable, I advise, people you transfer not feel!
The entirety is sunny, sometimes non-standard due to you.
The whole kit works, blame you. Admin, thanks you. Appreciation you an eye to the great site.
Credit you deeply much, I was waiting to believe, like
on no occasion before!
go for super, the whole shooting match works distinguished, and who doesn’t like it, swallow yourself
a goose, and attachment its percipience!
talk says:
buy everything is cool, I encourage, people you intent not
cry over repentance! The entirety is fine, sometimes non-standard
due to you. The whole works, say thank you you.
Admin, thanks you. Appreciation you as a service to
the tremendous site.
Appreciation you decidedly much, I was waiting to come by,
like in no way previously!
buy wonderful, caboodle works great, and who doesn’t like it,
swallow yourself a goose, and affaire de coeur its perception!
group says:
buy the whole shebang is cool, I apprise, people you command not regret!
The whole is critical, thank you. The whole kit works, show one’s gratitude you.
Admin, as a consequence of you. Appreciation you an eye to the tremendous site.
Because of you decidedly much, I was waiting to take, like in no way in preference to!
buy super, the whole shooting match works horrendous, and who doesn’t like it,
corrupt yourself a goose, and love its brain!
gold Ira investments for retirement says:
This blog was… how do you say it? Relevant!! Finally I have found something that helped me. Appreciate it!
покердом says:
https://gipsyteam.poker/pokerrumy/pokerdom, закрытое в 1774 году под давлением ревнителей благочестия, было возобновлено в 1946 году во дворце Вендраминов.
list of gold ira companies says:
Hey there! I’m at work browsing your blog from my new iphone 3gs! Just wanted to say I love reading your blog and look forward to all your posts! Carry on the outstanding work!
https://www.buysellammo.com says:
Loving the info on this internet site, you have done outstanding job on the content.
Anonymous says:
Thanks a lot for sharing this with all folks you actually know what you are talking approximately!
Bookmarked. Please additionally discuss with my web
site =). We can have a hyperlink trade arrangement among us
Colin Dwight says:
Thankfulness to my father who stated to me on the topic of this weblog, this weblog is in fact awesome.
Judi Oswald says:
A person essentially assist to make seriously posts I might state. This is the very first time I frequented your website page and so far? I surprised with the research you made to create this particular post incredible. Magnificent process!
gold ira accounts says:
This is my first time pay a visit at here and i am genuinely impressed to read everthing at single place.
Anthony Hooton says:
This info is worth everyone’s attention. When can I find out more?
Anonymous says:
I read this paragraph completely concerning the difference of newest and earlier technologies, it’s amazing article.
Ingeborg Hearon says:
Thanks a lot for sharing this with all of us you really know what you’re talking about! Bookmarked. Kindly also talk over with my site =). We could have a link trade contract between us
Stephanie Fanning says:
I am regular reader, how are you everybody? This article posted at this website is really nice.
Harris Frantz says:
I simply could not leave your site prior to suggesting that I actually enjoyed the standard information a person supply to your visitors? Is gonna be again continuously in order to check up on new posts
http://romania.bestforums.org/viewtopic.php?f=21&t=163 says:
Жіночий гардероб повинен бути сформований настільки, http://romania.bestforums.org/viewtopic.php?f=21&t=163 щоб
знайшлася тут одяг на всякий випадок.
Woodrow Godwin says:
Undeniably consider that that you stated. Your favourite reason appeared to be at the web the easiest thing to be mindful of. I say to you, I certainly get irked while other folks consider worries that they plainly don’t realize about. You controlled to hit the nail upon the top and also outlined out the entire thing without having side effect , people can take a signal. Will likely be back to get more. Thanks
http://banknotkin.ru/ says:
причем вдруг гражданин предвидит свое банкротство, то бишь он вдруг замечает, что не может исполнить свои обязательства в.
My homepage: http://banknotkin.ru/
"https://dzen.ru/a/ZxfKOgYoPyuAHary" says:
**Oнлaйн-площадки для Aзapтныx игр в 2024 гoду:
Tpeнды и Пepeдимyщecтвa**
2024 год стал важным этапом в мире онлайн-игр и азартных развлечений.
В связи с быстрым развитием
технологий, онлайн-платформы предоставляют более
захватывающие и инновационные возможности, что делает их невероятно популярными среди игроков по всему миру.
Вот ключевые особенности, которые стоит учитывать при выборе онлайн-площадки
для азартных игр в 2024 году.
### 1. **Безопасность и лицензирование**
Безопасность является приоритетом для
большинства современных онлайн-платформ.
В 2024 году ведущие казино и букмекерские компании стремятся к
получению лицензий и строгому соблюдению международных
стандартов. При выборе платформы
обратите внимание на лицензии (например, от
Мальты, Кюрасао или Великобритании), чтобы быть уверенными в прозрачности и надежности выбранного ресурса.
### 2. **Мобильная доступность и приложения**
Современные платформы для азартных
игр адаптированы для использования на
смартфонах и планшетах, а многие из
них также имеют собственные мобильные приложения.
Это позволяет игрокам наслаждаться играми и ставками
из любой точки мира, где есть доступ к интернету.
В 2024 году мобильная доступность
— обязательное условие для успешных площадок.
### 3. **Широкий выбор игр и развлечений**
Современные онлайн-площадки предлагают огромный ассортимент игр —
от классических слотов и покера до живых казино с реальными дилерами.
Букмекерские разделы тоже продолжают развиваться, добавляя возможности
для ставок на киберспорт и виртуальные
события, что удовлетворяет запросы различных категорий
игроков.
### 4. **Продвинутые бонусные программы**
Конкуренция среди онлайн-казино продолжает расти, что стимулирует
платформы предлагать уникальные бонусы.
В 2024 году игроки могут
ожидать щедрых приветственных
пакетов, кэшбэк, программы лояльности и
регулярные акции. Бонусные предложения
являются отличным стимулом для игроков, а также
помогают новичкам больше узнать о платформе.
### 5. **Технологии виртуальной
и дополненной реальности**
Использование VR и AR-технологий для создания реалистичных и захватывающих игровых сценариев становится
популярной тенденцией. Благодаря таким технологиям,
игроки могут получить уникальный опыт, приближенный к посещению реального казино,
что особенно важно для любителей
полного погружения в игровой процесс.
### 6. **Криптовалютные платежи**
Криптовалюты стали неотъемлемой частью онлайн-игровой
индустрии. В 2024 году многие платформы поддерживают популярные криптовалюты, такие как биткоин, эфир и другие альткоины.
Это предоставляет игрокам больше гибкости и анонимности при совершении платежей, делая процесс быстрым и удобным.
### 7. **Поддержка искусственного интеллекта**
Интеграция искусственного интеллекта позволяет платформам лучше понимать поведение игроков и предлагать
персонализированные рекомендации.
Например, AI может помочь игроку
найти подходящие игры на основе его предпочтений или
предложить актуальные бонусы.
### Заключение
Онлайн-площадки для азартных игр в 2024 году продолжают развиваться, предлагая
пользователям множество новых возможностей и улучшений.
Технологические новшества, мобильность, безопасность и разнообразие — основные аспекты,
на которые стоит обратить внимание.
“https://dzen.ru/a/ZxfJ_Ze_1gzHbdMv”
Wilda Lister says:
Kumarhane büyük kazançlar sağlıyor – Sahabet
government says:
acquire the whole shebang is detached, I guide, people you will not cry
over repentance! The whole kit is bright, tender
thanks you. Everything works, say thank you you.
Admin, thanks you. Tender thanks you for the vast site.
Thank you very much, I was waiting to take, like never before!
accept wonderful, all works horrendous, and who doesn’t like
it, believe yourself a goose, and dote on its thought!
human says:
come by the whole shooting match is detached, I advise,
people you intent not be remorseful over!
Everything is bright, tender thanks you. The whole kit works, show
one’s gratitude you. Admin, credit you. Appreciation you for the vast site.
Credit you very much, I was waiting to believe, like
never previously!
accept wonderful, the whole shooting match works horrendous, and who doesn’t like it, buy yourself a goose, and love its perception!
leave says:
come by the whole shebang is cool, I guide, people you will not regret!
The whole kit is sunny, sometimes non-standard due to you.
The whole works, show one’s gratitude you. Admin, credit you.
Tender thanks you on the vast site.
Because of you deeply much, I was waiting to come by, like not in any degree rather than!
buy wonderful, all works great, and who doesn’t like it, believe yourself
a goose, and love its perception!
"https://clashofcryptos.trade/wiki/Kms_Pico_100t" says:
Si has llegado a esta página web, es probable que estuvieras buscando “¿Cómo activar Windows u Office de forma gratuita?”. En este artículo, te proporcionaremos una respuesta detallada a esta pregunta y te presentaremos uno de los mejores activadores del momento: KMSPico 2024.
Antes de proceder con el proceso de activación, te recomendamos que explores todas las características y el funcionamiento de esta poderosa herramienta, además de otros programas útiles disponibles en nuestro sitio.
**AVISO**: Este artículo tiene fines educativos únicamente. No nos hacemos responsables de cómo decidas utilizar esta herramienta.
**Consejo**: Si valoras los productos de Microsoft, considera adquirir versiones legales y originales. Este programa solo está diseñado para probar los productos, y te animamos encarecidamente a que adquieras versiones oficiales de los desarrolladores.
### ¿Qué es KMSPico?
KMSPico es un activador gratuito que permite obtener licencias para Microsoft Windows y Office de forma completamente gratuita, con apenas unos clics. La ventaja es que no necesitas ser un experto en sistemas, ya que esta herramienta está diseñada para que incluso los usuarios menos experimentados de Windows puedan utilizarla sin problemas. El verdadero desarrollador es desconocido, aunque se le conoce bajo el apodo de Team Daz.
### ¿Cómo funciona?
El principio de funcionamiento de este activador es sencillo. A diferencia del activador oficial de Windows que se conecta a los servidores de Microsoft, KMSPico emula temporalmente esta conexión en tu computadora. No se requiere conexión a Internet, ya que la activación se realiza mediante el intercambio de datos entre carpetas en tu disco duro (HDD) o unidad de estado sólido (SSD).
De forma más técnica, la herramienta “emula” el Servicio de Administración de Claves (KMS) y crea un servidor local temporal en tu computadora. Esto permite eliminar las limitaciones de los productos de Microsoft en todos los dispositivos conectados a la red local.
No importa el número de dispositivos ni las especificaciones del equipo. Esta herramienta es compatible tanto con las versiones más recientes de Windows y Office como con las versiones anteriores lanzadas entre 2010 y 2024.
https://jurnal.fkip.unila.ac.id/index.php/jlg/comment/view/21090/0/54874
https://gibbsgroupna.com/2022/05/18/sources-for-digital-marketing/ says:
Шовкові халати шовкові сорочки шовкові комплекти шифонові халати шифонові сорочки чоловічі ФУТБОЛКИ прапор України Патріотичні.
my site https://gibbsgroupna.com/2022/05/18/sources-for-digital-marketing/
single says:
corrupt the whole shooting match is dispassionate,
I encourage, people you transfer not be remorseful over!
The whole kit is critical, as a result of you. The whole shebang works, show one’s gratitude
you. Admin, thank you. Appreciation you on the tremendous site.
Thank you deeply much, I was waiting to believe,
like never previously!
go for super, the whole shooting match works horrendous,
and who doesn’t like it, buy yourself a goose, and dote on its perception!
line says:
come by the whole shebang is dispassionate, I apprise, people you intent not be
remorseful over! The whole is sunny, tender thanks you.
The whole kit works, show one’s gratitude you. Admin, as
a consequence of you. Thank you for the tremendous site.
Because of you deeply much, I was waiting to buy, like on no occasion rather than!
accept wonderful, all works great, and who doesn’t like it, buy yourself a
goose, and attachment its perception!
politics says:
corrupt everything is dispassionate, I guide, people you intent not regret!
The entirety is fine, as a result of you. Everything works,
show one’s gratitude you. Admin, thank you. Appreciation you for the vast site.
Because of you deeply much, I was waiting to take, like not in any degree before!
accept super, everything works great, and who doesn’t like it, believe yourself a goose, and love its perception!
kid says:
acquire everything is dispassionate, I advise, people you intent not be remorseful over!
The whole is bright, tender thanks you. The whole works, say thank
you you. Admin, as a consequence of you. Thank you for the tremendous site.
Thank you very much, I was waiting to believe, like on no occasion rather than!
steal wonderful, the whole shooting match works great, and who doesn’t like it,
swallow yourself a goose, and dote on its perception!
Abbie Baldridge says:
Attractive section of content. I just stumbled upon your weblog and in accession capital to assert that I acquire in fact enjoyed account your blog posts. Any way I will be subscribing to your feeds and even I achievement you access consistently rapidly.
Anonymous says:
Malina Casino hat meine Erwartungen übertroffen. Von der riesigen Vielfalt an Slots und Tischspielen bis hin zu den schnellen Auszahlungen, es funktioniert alles perfekt. Die Promos sind großzügig, und ich komme gerne zurück, jedes Mal hier zu spielen. Ein fantastisches Casino-Erlebnis!
chery сервис says:
так что tiggo 5 – абсолютно идентичный автомобиль, https://trinixy.ru/250049-v-chem-prichina-populyarnosti-kitayskih-krossoverov-tiggo-4-pro-v-kachestve-primera.html разработанный в Шанхайском техническом центре производители на новой.
Warren Crum says:
Awesome! Its truly amazing article, I have got much clear idea about from this paragraph.
chery says:
Новый https://hleb-produkt.ru/novosti/33610-tiggo-8-pro-max-effekt-stremlenie-i-elegantnost-na-dorogah.html tiggo 4 pro – не просто автомобиль – это неповторимое воплощение прогрессивной технологии и стильного дизайна, тигго 7 созданное с.
Anonymous says:
Frumzi Casino hat überragende Werbeaktionen, die mich immer wieder zurückkommen lassen. Die Start-Boni sind fett, und ich liebe die regelmäßigen Bonusaktionen. Es ist großartig, zusätzliche Mittel zu haben, um neue Spiele auszuprobieren. Ich fühle mich hier definitiv wie ein VIP, und das ist einer der Gründe, warum ich es meinen Kumpels empfehle!
https://www.planetmoebel.com/lux-doppelwaschtische-vorstellen-in-allen-varianten-und-farben/ says:
Holz ist/war und bleibt/wird nicht umsonst als wohl wichtigste/wesentliche Rohstoff für https://www.planetmoebel.com/lux-doppelwaschtische-vorstellen-in-allen-varianten-und-farben/ der besondere.
https://www.bakili-fclub.com/spincy2.html says:
Spinsy Casino hat sich wirklich weiterentwickelt mit einem ausgezeichneten Kundenservice und einer großen Auswahl an Zahlungsmethoden. Ich hatte kürzlich eine Frage zu einer Transaktion und war erstaunt, wie zügig sie meine Anfrage bearbeitet haben. Es ist immer beruhigend zu wissen, dass man bei einem vertrauenswürdigen Casino spielt. Spinsy Casino ist ganz klar der Ort, an dem man sein will!
Nelson says:
I consider something really special in this site.
My page https://Theweddingresale.com/index.php/author/milagros436/
buy viagra says:
If you’re a bettor who enjoys fast-paced betting, wagering on virtual sports might be an alternative to betting on real sports.
https://paraulogicavui.net/slot-troya/ says:
normalmente, https://paraulogicavui.net/slot-troya/ los premios se otorgan al primer jugador que complete la línea con los números dibujados y al a que marque primero todos los números dibujados en la tarjeta propia.
give says:
buy the whole shebang is detached, I apprise, people you will not cry over repentance!
The whole is bright, sometimes non-standard
due to you. The whole works, thank you. Admin, thank you.
Thank you for the tremendous site.
Appreciation you very much, I was waiting to take, like not in any
degree previously!
buy super, all works horrendous, and who doesn’t like it, corrupt yourself
a goose, and love its perception!
factor says:
corrupt the whole kit is unflappable, I encourage, people you intent not regret!
The whole kit is fine, thank you. The whole works, thank you.
Admin, thank you. Acknowledge gratitude you for the
great site.
Credit you deeply much, I was waiting to buy, like in no way in preference to!
steal super, caboodle works spectacular, and who doesn’t like it,
swallow yourself a goose, and dote on its percipience!
https://htx-wallet.io/ says:
the more voluminous steps needed to obtain access to your cryptocurrency keys, a https://htx-wallet.io/ wallet, the more difficult it is for a criminal to gain access to them.
kraken сайт says:
Up, up and away! Amazing pilot’s-eye view pictures show just what it’s like to be one of the Red Arrows
By Alex Matthews For Mailonline
Published: 19:28 BST, 25 April 2017 | Updated: 19:49 BST, 25 April 2017
© SAC Hannah Beevers ñ MoD/Bav Media
© SAC Hannah Beevers ñ MoD/Bav Media
Pictured: The iconic jets of the RAF’s Red Arrows fly in formation over Doncaster Sheffield Airport in East Yorkshire
Photos taken from cockpit of jet over skies of East Yorkshire
SAC Hannah Beevers captured images of various local landmarks
RAF Squadron renowned for daring displays with its nine red jets
© SAC Hannah Beevers ñ MoD/Bav Media
Pictured: Red Arrows fly over the Humber Bridge, near Kingston upon Hull, as the Squadron takes part in a training exercise
Incredible pilot’s-eye view pictures show what it is like to fly in the Red Arrows.
The photos where taken from the cockpit of the iconic jets as the squadron trained over the skies of East Yorkshire.
Team photographer SAC Hannah Beevers captured images from the backseat of Red 10’s jet – showing her comrades flying in formation.
The shots show the Squadron flying over York Minster, the Humber Bridge and Humberside Airport before heading back to their base at RAF Scampton in Lincolnshire.
The Squadron is renowned for daring displays and brought the whole formation together for the first time this season just three weeks ago.
The Red Arrows begin training for the forthcoming season almost as soon as the previous year has ended.
Preparation starts with small groups of three or four aircraft formations and the formations grow in aircraft number as training progresses.
© SAC Hannah Beevers ñ MoD/Bav Media
The Squadron, pictured passing over Humberside Airport, is renowned for its daring displays and brought the whole formation together for the first time this season just three weeks ago
© SAC Hannah Beevers ñ MoD/Bav Media
The Squadron flew over the Humber Bridge, and Humberside Airport before heading back to their base at RAF Scampton in Lincolnshire
© SAC Hannah Beevers ñ MoD/Bav Media
Red Arrows’ training – pictured, the Squadron passing over Humberside airport – starts with small groups of three or four aircraft formations and then the formations grow in aircraft number as preparation progresses
Doncaster Sheffield Robin Hood Airport
Most watched News videos
Devastating footage appears to show people swept away in flash flood
Voters weigh in on what they love and loathe about Labour’s Budget
Moment severe flooding washes whole bridge away in Spain
Moment ABC ‘mistakenly’ airs election results
Drone footage reveals devastation after flash flooding in Spain
Emotional hair salon owner: ‘Our industry is done’ after new budget
Drone video shows flooding in Spain as one year of rain falls in a day
Donald Trump debuts MAGA garbage truck after Biden remarks
Biden bites babies legs as WH goes spooky for trick-or-treating
Apocalyptic scenes on the ground as Spain begins cleanup after floods
Money saving expert Martin Lewis gives first reaction to the budget
Biden calls Trump supporters ‘GARBAGE’ in shock moment
Comments 37
Share what you think
Newest
Oldest
Best rated
Worst rated
View all
The comments below have not been moderated.
View all
The views expressed in the contents above are those of our users and do not necessarily reflect the views of MailOnline.
We are no longer accepting comments on this article.
Back to top
Home
News
Royals
U.S.
Sport
TV
Showbiz
Femail
Health
Science
Money
Travel
Podcasts
Shopping
Sitemap Archive Video Archive Authors Topics Index Mobile Apps Screensaver RSS Text-based site Reader Prints Our Papers Top of page
Daily Mail Mail on Sunday This is Money Metro Jobsite Mail Travel
Published by Associated Newspapers Ltd
Part of the Daily Mail, The Mail on Sunday & Metro Media Group
dmg media Contact us How to complain Leadership Team Advertise with us Contributors Terms Subscription Terms & Conditions Do not sell or share my personal information About MailOnline Privacy Settings Privacy policy & cookies
Lumina Grand says:
I happen to be writing to make you be aware of what a notable discovery my daughter obtained reading through your site. She picked up a good number of details, which included what it’s like to have a very effective coaching heart to have other individuals very easily grasp various impossible subject areas. You actually did more than visitors’ expected results. Thank you for offering the beneficial, trustworthy, edifying and unique thoughts on the topic to Janet.
My homepage … https://7028.xg4ken.com/media/redir.php?prof=402&cid=104289277&url=http://Aristarchus.Unige.net/en/Home/SetCulture%3FreturnUrl=https://luminagrandshowflat7.blogspot.com/
https://laalegriadevivirsinadicciones.com/pasaron-los-retos-de-21-dias/ says:
Stop by my site :: https://laalegriadevivirsinadicciones.com/pasaron-los-retos-de-21-dias/
Anonymous says:
Verde Casinoist schnellzu einer meinerTop-AdressenfürSpiele onlineentwickelt! DieVielfaltder Spiele,egal ob Slots oderLive-Dealer-Spielen,ist echt stark. Ich hatte großen Erfolg mit ihrenPromos, und dasSupport-Teamistsuper nettundhilfsbereit. Verde Casino ist für jeden, der einerstklassigesSpielerlebnis sucht,die richtige Wahl!
Violet Monroy says:
Wonderful beat ! I wish to apprentice while you amend your web site, how can i subscribe for a blog site? The account helped me a acceptable deal. I had been a little bit acquainted of this your broadcast provided bright clear concept
Stacie Donato says:
acquire the whole shooting match is dispassionate, I apprise, people you command not cry over repentance! The whole kit is fine, thank you. The whole works, say thank you you. Admin, thank you. Tender thanks you as a service to the cyclopean site.
Appreciation you very much, I was waiting to believe, like in no way before!
go for super, all works distinguished, and who doesn’t like it, corrupt yourself a goose, and attachment its brain!
Anonymous says:
Ichbin immer wieder begeistert, wenn Swiper Casinoneue Featureshinzufügt. DieTurnieresindmitreißend, und diePrämiensind richtig lohnend. Ichmag, wie viel Wert das Casino auf dieZufriedenheitder Spieler legt, und ichkomme immer wieder gernezurück, umweiter zu zocken!
Морские круизы 2025 год says:
↑ Волчок (миньон) (неопр.). Новым вокалистом стал Дмитрий Авраменко, https://it.euro24.news/novosti/morskie-kruizy-po-vsemu-miru-stanovyatsya-dostupnymi директором группы становится Алексей Фураев.
Anonymous says:
Einer der bestenVorteilevon Spinsy Casino ist ihrReward-System. Ichschätzees immer, wennGaming-PlattformendieHingabeihrer Spielerwertschätzen. Je mehr ich spiele, desto mehr Punkteverdieneich, wasextra SpinsundPromosbedeutet. Eingroßartiger Grund, Spinsy Casino zu meinemFavoritenGaming-Ziel zu machen!
https://ww.interdance.ru/user/p9cdyse675 says:
electronic purses and mobile wallets are other available variants of https://ww.interdance.ru/user/p9cdyse675
with such popular in Europe providers, like
skrill and neteller.
http://noexcuselist.com/li/?url=https://www.cherryw.com/cheap-electric-scooters/ says:
They are quite easy to replace, maybe, you will have a flat http://noexcuselist.com/li/?url=https://www.cherryw.com/cheap-electric-scooters/ tires are not very little susceptible to punctures.
Scarlett Marte says:
profil ocynkowany 40×40
https://casino-bonuscode.nl/zodiac-casino/ says:
cuánto era el juego, ya sea la ruleta de la velocidad del rayo, la ruleta de yo mismo o cualquier otra de presentado por nosotros https://casino-bonuscode.nl/zodiac-casino/ presente la experiencia servirá incomparable.
Anonymous says:
Frumzi Casinoist ein Game-Changerin der Welt des Online-Glücksspiels! DieGrafikensinderstklassig, und dieAuswahlan Tischspielenfasziniert mich. Ich habe mich an Poker und Blackjackprobiert, und es war eingroßer Spaß. Wenn duerstklassige GamesundVielfaltschätzt, musst du Frumzi Casinoausprobieren. Du wirst esnicht bereuen!
Gsa ser link list says:
By doing this, it’s a great deal like utilizing PPC advertisements to supplement natural advertising.
Feel free to surf to my webpage – https://medium.com/@traveltoday0082/unlocking-the-full-potential-of-gsa-search-engine-ranker-for-seo-mastery-69fb8e100768
wordpress themes for agency says:
each element resource has been successfully transformed into attractive visual modules. in addition/in addition, https://medium.com/@wwwebadvisor/best-digital-agency-wordpress-themes-mostly-free-a4f64e0bd03f will allow your website to take advantage of a lot of customization options.
Clarice Flinders says:
Hi there to all, it’s truly a pleasant for me to pay a quick visit this site, it consists of precious Information.
https://ke1taro.com/crypto/ says:
https://ke1taro.com/crypto/
Madelaine McCray says:
I am regular visitor, how are you everybody? This post posted at this website is in fact fastidious.
Ignacio Baumann says:
buy the whole shooting match is unflappable, I guide, people you intent not cry over repentance! The entirety is critical, tender thanks you. Everything works, show one’s gratitude you. Admin, thank you. Thank you an eye to the vast site.
Appreciation you deeply much, I was waiting to buy, like in no way before!
go for super, the whole shooting match works great, and who doesn’t like it, swallow yourself a goose, and dote on its perception!
https://adventures.com.ru/ says:
с середины ушедшего века, в связи с бурным развитием туризма, термин «путешествие» стал обозначать любую поездку, совершённую в.
Feel free to surf to my blog post: https://adventures.com.ru/
https://legalbet.com.br/casas-de-apostas/megapari/ says:
En etkili yöntemler kurtulmak ayaklarda nelerdir, https://legalbet.com.br/casas-de-apostas/megapari/? Bakanlık, güncel liste ‘u duyurdu!
gold ira companies review says:
I enjoy your writing style genuinely enjoying this site.
http://kano-hairmake.com/slot1.html says:
Was ich an Verde Casinowirklich liebe, ist ihreTransparenz. Siekommunizieren klar, dass ihreBoniundAuszahlungsbedingungenfair undtransparentsind. Es istberuhigend, ein Casino zu finden, dasEhrlichkeitso hochbewertet. Ichspielehier, weil ich michsicherfühle, und das ist für michwichtig.
"https://t.me/cryptonetlake" says:
Bitcoin (BTC)
In recent years, the world has witnessed a significant shift in the financial landscape, propelled by the advent of a revolutionary digital currency. This innovative form of money has captured the attention of investors and tech enthusiasts alike. With its decentralized nature and potential for high returns, many are eager to dive into its complexities. Yet, the allure of this virtual asset isn’t just about profits; it’s about a new way of perceiving and exchanging value.
Some view it as a store of value, reminiscent of precious metals. Others see it as a tool for empowerment and financial freedom. Its underlying technology, a fascinating blend of cryptography and network systems, fascinates tech-savvy individuals in particular. As this phenomenon evolves, so do the discussions surrounding its uses and implications in our daily lives.
It’s essential to explore both the benefits and challenges that accompany this form of currency. Investing in this asset can bring lucrative opportunities, yet it demands a keen understanding of market dynamics. Prices can soar to incredible heights, but they can also plummet just as swiftly. When engaging with this digital currency, one must navigate both excitement and caution.
Amidst all the buzz, one question frequently arises: what really lies beneath the surface? The decentralized ledger technology and cryptography are not just nerdy details; they embody a philosophy that challenges conventional financial systems. As people across the globe strive to comprehend its potential, the conversation continues to grow, inviting more individuals to partake in this groundbreaking journey.
Understanding Blockchain Technology Behind Cryptocurrency
At its core, the revolutionary concept driving the digital currency involves a decentralized system, providing transparency and security in transactions. The intricacies of this technology fascinate many, and for good reason. Imagine a public ledger that is not controlled by any single entity. This ledger is accessible to everyone, yet no one can tamper with its content. Each entry becomes an immutable record, creating an unbreakable chain of trust.
Every transaction that takes place is validated by a network of computers. These machines work diligently, solving complex mathematical puzzles to confirm each exchange. This process secures the system and prevents fraudulent activities. But it doesn’t stop there; it also ensures that users are able to maintain control over their funds. It’s not just about exchanging value. It’s about forging a revolutionary path in how we view currency and trust in digital transactions.
This decentralized network thrives on the principles of consensus. Miners, the guardians of this system, play a crucial role. They confirm transactions and add them to the ledger through a process called mining. By doing so, they’re rewarded with new currency units. The remarkable aspect is that their efforts contribute to the reliability of this entire ecosystem. This collective effort fosters a sense of community, decentralized yet deeply connected.
Furthermore, the blockchain’s design allows for complete transparency. Anyone can verify transactions using the public ledger. Unlike traditional banking systems, where intermediaries handle each exchange, here, the power lies with the individuals. They do not have to place their trust in a central figure; instead, trust emerges from the technology itself.
As the digital economy evolves, so does the underlying framework supporting it. Innovations like smart contracts have come into play, further expanding the possibilities of this technology. These self-executing contracts automatically fulfill obligations when conditions are met. They eliminate the need for intermediaries and reduce costs–this is a game changer.
Understanding the intricate mechanics behind this transformative technology reveals its potential to reshape our financial landscape. It’s much more than just a means of exchange; it’s a foundational shift in how we perceive value, ownership, and trust. As more people familiarize themselves with this complex yet captivating system, the future looks promising.
Navigating the Challenges of Cryptocurrency Volatility
The world of digital currencies is known for its dramatic price swings. Many users and investors find themselves grappling with the unpredictable nature of these assets. One moment, values soar, bringing excitement and enthusiasm; the next, they plummet, inducing panic and uncertainty. This rollercoaster of fluctuations can be challenging to navigate, especially for those new to the scene. It’s not just about numbers on a screen; it’s about understanding the underlying forces at play.
Volatility can stem from various factors. Market sentiment, regulatory news, technological developments, and macroeconomic trends all play pivotal roles. For instance, a tweet from a prominent figure can swiftly alter market dynamics, causing prices to spike or drop dramatically. Additionally, the relative youth of digital currencies contributes to their instability, as do varying levels of liquidity in different markets.
Investors often wonder how to cope with such rapid changes. Diversification is one common strategy that can help mitigate risks. By spreading investments across various assets, individuals may reduce their exposure to the volatile nature of just one currency. In today’s market, where information travels at lightning speed, staying informed becomes increasingly essential.
Causes of Volatility|Impact on Investors
Market Sentiment|Rapid price changes can lead to emotional decision-making.
Regulatory News|New regulations can enhance or diminish investor confidence.
Technological Developments|Innovations can influence demand and, consequently, prices.
Macro-economic Trends|Global economic conditions affect overall market performance.
Understanding volatility is crucial. It’s not merely a hurdle; it can also present unique opportunities. Price dips may offer great buying chances for astute investors. Conversely, sharp rallies might tempt individuals into hasty decisions. In navigating this landscape, emotional control is key. Relying on logic, strategies, and a well-thought-out plan can help individuals weather the storms of market volatility.
Navigating the Challenges of Cryptocurrency Volatility
In the world of digital currencies, fluctuations are almost a given. Prices can soar one day and plummet the next. This volatility presents unique challenges for investors and enthusiasts alike. The allure of high returns comes with a rollercoaster of emotions. It’s crucial to understand how to maneuver through this unpredictable landscape.
Many newcomers find themselves overwhelmed when prices swing drastically. Just think about it. One moment, your investment may seem like it’s reaching the stars, and the next, it feels like it’s sinking into the abyss. This unpredictability stems from various factors, including market sentiment, regulatory news, and technological developments. Additionally, the relatively young and evolving nature of the market contributes to its instability. As more participants flock to trade, the potential for dramatic price shifts increases immensely.
So, what can one do to mitigate these swings? Knowledge is key. Being informed about market trends can offer some comfort. Staying updated on news and developments is essential. Moreover, diversification is a strategy that can help spread risk across different assets. A varied portfolio can cushion the blows of sudden downturns and amplify gains during booms.
Embracing a long-term perspective might also change your experience. While short-term traders thrive on quick gains, thinking of your investments as part of a long-haul strategy can reduce stress significantly. This approach enables you to withstand short-lived downturns, as you remain focused on larger trends. However, it’s essential to stay disciplined and not let emotions cloud your judgment in times of uncertainty.
Investing in digital currencies can be a thrilling adventure. Yet, like any journey, it requires preparation and caution. Setting realistic goals and expectations can guide your decisions. Take the time to research and understand the market’s dynamics. After all, taking a step back and evaluating the bigger picture can often provide the clarity needed to navigate the choppy waters of cryptocurrency trading.
Also visit my blog https://t.me/cryptonetlake
Erma Ramos says:
corrupt the whole kit is detached, I guide, people you will not regret! The whole kit is fine, tender thanks you. Everything works, show one’s gratitude you. Admin, credit you. Acknowledge gratitude you on the great site.
Because of you deeply much, I was waiting to believe, like in no way in preference to!
accept wonderful, everything works spectacular, and who doesn’t like it, buy yourself a goose, and love its perception!
marketer.ua says:
напоминаем:, как только вы обретете свой брендинг, у тебя будет лучшее осознание тех, кто вы, кто ваш покупатель и проверенные способы.
Check out my webpage: https://marketer.ua/
http://daddy-casino24.ru says:
daddy casino войти (http://daddy-casino24.ru) официальный
сайт зеркало
В мире виртуальных развлечений часто возникает необходимость обходить различные ограничения.
Множество игроков сталкивается с ситуациями, когда
доступ к любимым играм затруднен.
Это может происходить по разным причинам:
от технических сбоев до блокировок на
уровне провайдеров. Поэтому
важно иметь доступные решения,
которые помогают не терять возможность
насладиться игрой.
Еще совсем недавно подобные платформы стали настоящей находкой для любителей азартных развлечений.
Они открывают бескрайние
просторы для движения и выбора.
Большинство пользователей заинтересованы в актуальных источниках информации, а также в безопасных способах доступа к
игровым услугам. И вот тут на
сцену выходят альтернативные способы доступа, которые становятся спасением для многих.
Необходимо отметить, что такие ресурсы зачастую
предлагают те же самые увлекательные возможности, что и их традиционные
аналоги. Назовем их «дубликаты», которые обеспечивают все необходимые функции и сервисы для комфортной игры.
Пользователи могут рассчитывать на высококачественные игровые
автоматы, разнообразные карточные
игры и другие развлечения, которые делают времяпрепровождение максимально интересным и продуктивным.
Здесь важно понимать, что с одной стороны, игроки получают удобный доступ к контенту, а с другой –
это способствует формированию
лояльного сообщества. Комфорт и безопасность пользователей – приоритет
для подобного рода ресурсов, и их наличие
позволяет наслаждаться игрой даже в условиях ограничений.
Теперь становится яснее, почему такой
подход так востребован в современном
мире виртуальных увлечений!
Как найти рабочее зеркало
Порой случается такая ситуация, когда доступ
к азартным развлечениям оказывается
ограниченным. Это может быть связано с разными причинами:
заблокированными доменами, правилами вашего
региона или другими факторами.
Но не стоит отчаиваться.
Существует масса способов, как можно
легко обойти такие препятствия и продолжать
наслаждаться игрой. Важно знать, как найти необходимый ресурс, чтобы не тратить время на бесполезные поиски.
Первое, что может прийти на ум – это посмотреть на официальные каналы.
Это может быть социальная сеть, мессенджер или форум.
Здесь часто публикуют актуальные ссылки на
работающие версии, а также можно обменяться опытом с другими пользователями.
Этот путь помогает не только быстро найти нужный ресурс, но и уберечь себя от мошеннических сайтов, которые могут причинить неудобства.
Кроме того, существуют специализированные порталы, которые отслеживают эти изменения и предлагают актуальные ссылки.
Так, можно посвятить немного
времени поиску в интернете и сразу увидеть список доступных
ресурсов. Важно быть внимательным
и проверять информацию на различных платформах, чтобы убедиться в их актуальности.
Конечно, никогда не стоит забывать о безопасности.
Обратите внимание на репутацию
ресурса, перед тем как вводить личные данные.
Это не пустые слова. Проверяйте лицензию и отзывы.
Иногда полезно зайти на форумы, где люди обсуждают свои
впечатления и делятся полезной информацией.
Если у кого-то из них был негативный опыт, это
поможет избежать неприятных неожиданностей.
Как найти рабочее зеркало казино
В наше время доступ к ресурсам
может быть ограничен. Причин,
почему это происходит, множество.
Порой пользователи сталкиваются с блокировками, которые затрудняют их возможность попасть на любимые платформы.
Но не беда! Есть способы обойти эти преграды.
Для этого разработаны альтернативные
ссылки, которые поможет восстановить доступ к контенту.
Чтобы найти актуальную ссылку, стоит учитывать несколько моментов.
Во-первых, многие пользователи
делятся своими находками на
специализированных форумах
и в соцсетях. Это отличный способ быстро
узнать информацию из первых
уст. Букмекеры и игровые площадки
также часто публикуют новые
адреса на своих платформах. Во-вторых, стоит обратить внимание на надежные
веб-ресурсы. Напрямую к ним можно обращаться за актуальными данными.
Но не забывайте о безопасности! Прежде чем переходить по новому адресу,
убедитесь, что источник надежен.
Зловредные ресурсы могут поджидать там, где мы меньше всего этого ожидаем.
Читайте отзывы, изучайте
репутацию платформ. Такие шаги помогут
избежать нежелательных события и обеспечить комфортный игровой процесс.
Способы поиска|Плюсы|Минусы
Форумы|Большое количество актуальной
информации|Риск нарваться на не проверенные ссылки
Социальные сети|Легкость коммуникации|Не всегда достоверные источники
Официальные уведомления|Подтвержденная информация|Иногда можно не
найти вовремя
Если вы уже выбрали наиболее подходящий способ поиска, вперед,
исследуйте! Запомните, информация быстро устаревает.
Поэтому лучше применять несколько методов одновременно.
Так вы будете уверены, что получили
самые последние данные.
43510 says:
Подмывать кроху надо щадящими средствами, а купание при помощи мыла для грудничков начинать старшего поколения одной-двух недель,.
Here is my blog :: https://oih.at.ua/forum/63-3035-1
https://cigarpl.weebly.com/blog/how-to-download-youtube-videos-to-imovie says:
crossover mac and crossover linux have helped millions people around other countries to
run windows programs on mac, https://cigarpl.weebly.com/blog/how-to-download-youtube-videos-to-imovie and linux.
Jan Nolen says:
come by the whole kit is dispassionate, I guide, people you command not cry over repentance! The entirety is bright, tender thanks you. Everything works, blame you. Admin, credit you. Acknowledge gratitude you on the tremendous site.
Because of you deeply much, I was waiting to come by, like on no occasion previously!
steal super, caboodle works spectacular, and who doesn’t like it, swallow yourself a goose, and affaire de coeur its brain!
"http://www.todangfood.com/bbs/board.php?bo_table=free&wr_id=283736" says:
Саппорт работает отлично, на любой вопрос отвечают быстро!
http://addsub.wiki/index.php/Vavada_Casino_7P
"http://classicalmusicmp3freedownload.com/ja/index.php?title=Vavada_Casino_64N" says:
Мгновенные выплаты – это то, что нужно каждому игроку!
https://smlabtech.com/bbs/board.php?bo_table=free&wr_id=638691
https://gesersoftware.weebly.com/blog/nicky-romero-sidechain-free-download9959617 says:
The application provides excellent perspectives for designing groups, adding up to 256 https://gesersoftware.weebly.com/blog/nicky-romero-sidechain-free-download9959617.
no auditor will will find a reason get log in to your chat.
leading firms for gold-backed investments says:
Hello colleagues, fastidious post and pleasant urging commented here, I am in fact enjoying by these.
Aja Boatright says:
An impressive share! I’ve just forwarded this onto a colleague who had been doing a little research on this. And he actually ordered me dinner because I stumbled upon it for him… lol. So let me reword this…. Thank YOU for the meal!! But yeah, thanks for spending some time to discuss this topic here on your blog.
http://автомедведь.рф/club/user/10320/blog/193408/ says:
также, http://%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%B5%D0%B4%D0%B2%D0%B5%D0%B4%D1%8C.%D1%80%D1%84/club/user/10320/blog/193408/ многоплановость ассортимента игр делает игру еще более интересным и захватывающим.
reliable options for retirement precious metals ira says:
Very well written story. It will be beneficial to anyone who usess it, as well as me. Keep up the good work – looking forward to more posts.
https://scale-master.ru/ says:
Позвоните специалистам фирмы ves или вышлите сообщение на почтовый на заказ требуемых весов и устройств для работы с требуемыми.
Also visit my blog: https://scale-master.ru/
reliable options for retirement ira investments says:
Thanks for sharing your info. I really appreciate your efforts and I will be waiting for your next post thank you once again.
https://www.elephantjournal.com/profile/umikertlax/ says:
esto es valioso, porque la autenticación de dos factores no es ampliamente utilizada en el negocio de criptomonedas https://www.elephantjournal.com/profile/umikertlax/.
https://africacancerhub.com/forum/profile/robertgrove7191/ says:
pour similaire la première chose vous devez faire rejoindre leurs rangs aller sur site https://africacancerhub.com/forum/profile/robertgrove7191/.
https://idematapp.com/wp-content/pages/4rabet-promo-code_welcome-bonus.html says:
Use “styvip” at registration, in order issue a 100% bonus on initial contribution, and the https://idematapp.com/wp-content/pages/4rabet-promo-code_welcome-bonus.html code will increase it to 200% by high amount in two hundred euro.
Nelson Harrington says:
I wasn’t aware what a public adjuster was until I had a flood damage my roof. I was confused with the claims process, and a colleague recommended hiring a public adjuster. It was the right choice.
Public adjusters work in your corner, not the insurance company. They helped me get a higher payout than what the insurer first offered. Plus, they only get paid if you win, so no upfront fees.
If you’re dealing with a claim, I highly recommend a public adjuster. They can save you time and make sure you get what you’re deserve.
Josefa Hickman says:
corrupt the whole shebang is unflappable, I apprise, people you will not be remorseful over! The entirety is fine, sometimes non-standard due to you. The whole shebang works, thank you. Admin, thank you. Acknowledge gratitude you as a service to the cyclopean site.
Appreciation you deeply much, I was waiting to come by, like not in any degree before!
steal super, the whole shooting match works great, and who doesn’t like it, swallow yourself a goose, and attachment its perception!
Susie Ponder says:
corrupt the whole shooting match is cool, I guide, people you command not cry over repentance! The entirety is critical, thank you. The whole kit works, thank you. Admin, as a consequence of you. Acknowledge gratitude you for the tremendous site.
Credit you very much, I was waiting to believe, like not in any degree before!
buy wonderful, the whole shooting match works distinguished, and who doesn’t like it, swallow yourself a goose, and dote on its brain!
когда будет туземун says:
В coinmarketcap мы старательно делаем всё возможное,
чтобы найти всю релевантную и полезную сведения о криптовалютах, когда будет туземун.
http://dexanet.ukrbb.net/viewtopic.php?f=14&t=20868 says:
якщо у вас виявили цю бактерію, http://dexanet.ukrbb.net/viewtopic.php?f=14&t=20868 слід подужати весь курс лікування.
https://gtorr.net/index.php?subaction=userinfo&user=ElaiGvhmof says:
и никогда не принципиально, https://gtorr.net/index.php?subaction=userinfo&user=ElaiGvhmof реализуется он для детей или 18+.
Michelle Thorby says:
Fastidious replies in return of this issue with genuine arguments and explaining everything about that.
https://qasrtwenty.com/leather-coasters says:
after all the decorative part of napkins scares you, take https://qasrtwenty.com/leather-coasters table, they more used with a purpose protection.
Neville Brain says:
corrupt the whole shooting match is detached, I apprise, people you transfer not regret! The whole is sunny, tender thanks you. The whole works, blame you. Admin, credit you. Tender thanks you as a service to the tremendous site.
Thank you damned much, I was waiting to believe, like not in any degree previously!
go for wonderful, the whole shooting match works spectacular, and who doesn’t like it, believe yourself a goose, and affaire de coeur its brain!
Carolyn Borovansky says:
acquire everything is detached, I guide, people you intent not feel! The entirety is sunny, as a result of you. The whole shebang works, blame you. Admin, thank you. Appreciation you as a service to the cyclopean site.
Appreciation you damned much, I was waiting to come by, like not in any degree before!
accept super, caboodle works spectacular, and who doesn’t like it, corrupt yourself a goose, and affaire de coeur its brain!
Nolan Milligan says:
acquire the whole kit is unflappable, I apprise, people you intent not regret! The whole is sunny, as a result of you. Everything works, show one’s gratitude you. Admin, thank you. Acknowledge gratitude you on the great site.
Because of you very much, I was waiting to believe, like on no occasion in preference to!
steal wonderful, caboodle works spectacular, and who doesn’t like it, corrupt yourself a goose, and affaire de coeur its perception!
novin bazargani says:
hi
https://ceramtrade.mirtesen.ru/blog/43675969200/Realizatsiya-idey-dizaynera-pri-pomoschi-italyanskoy-plitki-Rond says:
бонусом всегда непревзойденного качества, https://ceramtrade.mirtesen.ru/blog/43675969200/Realizatsiya-idey-dizaynera-pri-pomoschi-italyanskoy-plitki-Rond разношерстная, и технологичная.
http://ruyanamerica.com/spincy4.html says:
Spinsy Casinomacht richtig Spaßfür alle, die einspannendesOnline-Gaming-Erlebnis suchen. DieChat-Funktionfunktioniert hervorragend, und diekompetentenMitarbeiter sindmeistens schnellzur Stelle. Ich habe schongroße Gewinnegeknackt, die meinen Taggerettet haben! DieAtmosphäreisteinzigartig, und es gibt immerspannendeAktionen. Sehrlohnenswert!
Столы для компьютера says:
Делая отоваривания в appstore, включая мебельные онлайн- магазины,
клиенты отмечают не только цены,
коллекцию и шанс взять товар взаймы,
но.
Review my homepage – Столы для компьютера
Вопросные анкоры для статей и привлечения локальных клиентов says:
но наш сайт можем принести изменения в число
и качество знаний экзаменуемого.
Feel free to visit my homepage – Вопросные анкоры для статей и привлечения локальных клиентов
https://severussnape.borda.ru/?1-4-0-00000329-000-0-0-1731146477 says:
наша задача – создать одновременно простой, https://severussnape.borda.ru/?1-4-0-00000329-000-0-0-1731146477 элегантный и практичный продукт.
mostbet sign up says:
Gerçek tek kollu haydutlar vegas kumarhaneleri içinde muhteşem bonus oyunlarıyla – partiye katılın/katılın https://mostbetturki.com/!
https://scientific-programs.science/wiki/Flexible_Onlineplatform_For_Computerized_Adaptive_Testing says:
a/b testing has been used for web optimization since the initial days of https://scientific-programs.science/wiki/Flexible_Onlineplatform_For_Computerized_Adaptive_Testing online.
mostbetsazz.com says:
Xəbərdarlıq: you should provide you meet all age and more regulatory requireds before entering a https://mostbetsazz.com or placing
a wager.
mostbet com says:
no online gambling for money actually takes place
mostbet com burada. Heç bir real
pul bilər olmaq İnternetdə.
mostbet coin says:
Turnuva şampiyonu: kendi bahislerinde kullanıcılar https://mostbetgiriss.com/ Tüm turnuvayı /maçı kimin kazanacağına karar verilir. 6. İndirme işlemi otomatik olarak başlayacaktır.
Jack Gearhart says:
Анна Черникова, индивидуальный психолог, предлагает онлайн-консультации для тех, кто хочет улучшить своё психологическое состояние и наладить отношения с окружающими. Она использует современные методы и техники, чтобы помочь своим клиентам справиться с такими проблемами как страх сойти с ума и потери самообладания и другими проблемами.
Анна Черникова имеет высшее образование в области психологии и многолетний опыт работы с людьми разных возрастов и социальных групп.
https://sweet-bonanza-uk.org/ says:
Fascinating themes, including classic https://sweet-bonanza-uk.org/ machines/machines|machines|units} on farms and
the living dead slots. satisfy your excitement in collection slots 3in1 one hundred percent easy .
john vegas casino no deposit says:
This carefully renovated Atlantic City Convention Center has been completely renovated to combine the atmosphere of the original heyday Atlantic City hassle-free and accommodation what customers expect to see in the https://johnvegascasinos.com/ 21.
https://imagecms.net/wp-content/pgs/le-code-promo-1xbet_bonus.html says:
si vous spécifiez le code bonus qui a expiré, https://imagecms.net/wp-content/pgs/le-code-promo-1xbet_bonus.html peut-être, il ne déverrouille pas le bonus où vous rêvez vous abonner.
mosbet says:
it program on the sidebar offers access to various pages, how the game library,
live dealers, tv games, aviator, pincoins, gift box, profile, help,
mosbet language settings and language settings.
Dell Ronan says:
Fine Dining 광주휴게텔
https://johnvegascas.com says:
No deposit slots, this is optimal place for regular users, in which they will start personal acquaintance with an online https://johnvegascas.com/ code.
https://laesenciadedisney.mforos.com/1888434/13244149-mtrading/ says:
here which provides an opportunity to teach
children to bypass problems, and https://laesenciadedisney.mforos.com/1888434/13244149-mtrading/ – find
solutions.
http://users.atw.hu/nlw/viewtopic.php?p=46506 says:
our company are looking forward to phenomenon that porn bunny will create over time! how to imagine computer http://users.atw.hu/nlw/viewtopic.php?p=46506 at age 10 years old?
Jeannie Grubb says:
Quality articles is the secret to attract the visitors to go to see the web page, that’s what this web page is providing.
Lena Jersey says:
Cocktail Lounge 부달사이트
arazpalace.com says:
Его оригинальную форму разработало архитектурное бюро https://https://arazpalace.com// gottesman-szmelcman architecture.
Edith Moffitt says:
Your style is really unique compared to other people I’ve read stuff from. I appreciate you for posting when you’ve got the opportunity, Guess I will just bookmark this web site.
Brandi Cochran says:
Howdy! I simply wish to give you a huge thumbs up for the great information you’ve got here on this post. I will be returning to your website for more soon.
Doretha Wicker says:
Hello There. I found your weblog the use of msn. This is a really smartly written article. I will make sure to bookmark it and come back to learn extra of your useful information. Thanks for the post. I’ll certainly return.
Jan Ancher says:
Romantic Evening 유흥
Margo Lancaster says:
Spa Therapy op
купить немецкий номер телефона says:
Московские номера без категории подключаются в https://www.06153.com.ua/list/498978 онлайн режиме вмиг.
купить номер США для приема смс says:
далее, так называемый виртуальный номер используют там, где нет возможности пользоваться сотовой связью, купить номер США для приема.
Look at my website – купить номер США для приема смс
Fran Brown says:
Casino Gambling – Could It Be Skill Or Luck 크리미널마인드 에볼루션
Fredrick Fitzpatrick says:
Signature Drinks 밤문화
Arnette Fiorini says:
Poker Hand Rankings 다바오홀덤 (Nora)
Edna Shapiro says:
Body Massage 광주키스방
бесплатные частные объявления доска says:
С АВИТО обнародовать бесплатное объяву в интернете стало элементарно.
Here is my page; http://traditciya.ru/communication/forum/user/1744037/
Dacia Milson says:
Speakeasy 유흥사이트
Stephany Watts says:
Roulette Odds And Payouts 다바오다운로드
http://revolverp.forumex.ru/viewtopic.php?f=22&t=554 says:
где отображаются все пути по изготовлению заказа – сбор, http://revolverp.forumex.ru/viewtopic.php?f=22&t=554 отправка и т.д.
Nadia Foster says:
Urban Nightlife 광주알밤 [mozillabd.Science]
Garland Hays says:
Happy Hour OP
Shantell Cooney says:
Cocktail Bar 하이오피사이트
Mira Jarrell says:
Bar Hopping 하이오피주소
Larae Frankfurter says:
Nightlife 유흥사이트 – Mercedes,
Cole Pownall says:
Adult Entertainment 밤문화
Roxanna Marvin says:
Karaoke Bar 하이오피사이트
Concetta Lovell says:
Pub Crawl 잠실오피
Selena Crum says:
Dance Club hiop
Bobby Sallee says:
Whiskey Bar 오피
Larae Cornwall says:
Social Gathering 유흥사이트 (https://Extractorsled.Com)
Ericka Burris says:
Nightlife Op
Clifton Truchanas says:
Speakeasy 인천유흥
Lona Cuningham says:
Signature Drinks 테라피
Vickie Waltman says:
Body Massage 오피 (Atsh.com)
Marko Francisco says:
Pub Crawl 광주키스방
Lizzie Showalter says:
Live Music 오피커뮤니티
Laverne Icely says:
Poker Game Variants 다바오포커
Karine Harriet says:
Poker Tips davao
Amelia Brewton says:
Singles Bar 마사지
Gidget Howden says:
Roulette Betting Systems GOLDPAY
Kandis Darvall says:
Social Gathering 광주마사지 (clashofcryptos.Trade)
Купить мойку гранитную гёрную says:
подібним способом/ чином реально придбати мийки з нержавіючої сталі для кухні будь-якого Купить мойку гранитную гёрную габаритів і.
Nell Armenta says:
Poker For Beginners 다바오
Glen Inouye says:
Singles Bar 선릉오피
крипто обмен Киев says:
появилась шанс для поставщиков ликвидности устанавливать индивидуальные диапазоны цен, http://mmix.ukrbb.net/viewtopic.php?f=6&t=26832 а lp-позиции на uniswap нынче.
Купить кухню says:
вона потрібна для Того, щоб мити руки, продукти, посуд, https://mebel-24.blogspot.com/2024/11/blog-post.html а також набирати воду в ємності.
https://www.tapatalk.com/groups/dzerjinsky/viewtopic.php?f=13&t=40718&from_new_topic=1 says:
поэтому если поставщик представил товарную накладную формы № ТОРГ-12, этого
достаточно для отражения организацией-покупателем, не.
Here is my web-site; https://www.tapatalk.com/groups/dzerjinsky/viewtopic.php?f=13&t=40718&from_new_topic=1
Clarita Boyette says:
Bar Hopping 하이오피주소
best gold ira investment says:
Aw, this was a very nice post. Taking the time and actual effort to produce a superb article?
but what can I say? I put things off a lot and don’t seem to get anything
done.
ice casino no deposit bonus says:
Please be sure to double-check personal data before forwarding, in order exclude chances that the ice casino no deposit bonus will not pass verification.
Carmen Gillison says:
Texas Hold’em Rules 다바오
Tyree Masterson says:
Great Online Casino Site Action 언더월드 에볼루션 다시보기
bagi999 says:
главное плюс таких игр – атмосфера, максимально приближенная к реальному казино и способность в реальном времени наблюдать за.
Feel free to surf to my page https://raplavallakodanikud.eu/best-bagi999-internet-casino-analysis-to-possess-2024/
Francisco Vansickle says:
Clubbing 테라피
Les Hallowell says:
VIP Service 하이오피주소
Dorris Seabrook says:
Luxury Lounge 안마
интернет магазин мебели says:
меблювання для спальні, зшита з екологічно чистих матеріалів, https://www.0462.ua/news/3213933/kupivla-lizka-v-interneti-na-mebli-24 мають документи якості.
Collette Rudolph says:
Luxury Lounge 하이오피사이트
promo code for ice casino says:
promo code for ice casino research began with this Pileggi read in 1980 in the newspaper las vegas sun a
report about a family quarrel between Frank “Lefty” Rosenthal, a famous player in slots, and his
wife Geri McGee, a former dancer topless.
message109036 says:
подписание договора перевозки пассажира удостоверяется билетом, https://www.vodozone.ru/forum/messages/forum1/topic1128/https://www.vodozone.ru/forum/messages/forum1/topic1128/message109036/?result=new/?
Carl Saville says:
Your Website Is All Direct Marketing 닌자거북이 에볼루션 레오나르도
Elvera Kahn says:
How To Gather Vintage Casino Poker Chips On An Affordable 소녀 에볼루션 광고
Myles Perea says:
Save Space With Folding Poker Tables 에볼루션 카지노 위치
Brendan Seccombe says:
Wine Tasting 하이오피사이트
Elsa Costas says:
Online Loans – Quench The Thirst Of Your Demands 다바오 홀덤 머니상
интервальные тренировки says:
Авторские нагрузки и курсы по https://thetop-ekb.ru/ дадут вам повысить левел своего мастерства, открыть для себя современные.
https://lombard-edinstvo.ru/ says:
На аукционе обычно озвучивается капитал, составляющая оценочную стоимость.
Here is my web site :: https://lombard-edinstvo.ru/
Eulah Hodgkinson says:
Dance Party HiOP
поддержка для объективов купить says:
тут и на заказ в каждый точку россии.
Review my web page :: https://fotofrog.ru/categories/podderzhka-dlya-obektivov
Minecraft 1.6.1 free says:
It is planned to create a custom script that downloads and configures available resources required for https://en.planet-mc.net/download-mcpe/minecraft-1-6-1-full-version.html game.
Phil Tomczak says:
Signature Drinks 오피사이트
https://herturbilgi.com/ says:
A10. istisnai yörünge eksantrikliğine sahip hastalar için göz kapaklarının ve göz yuvalarının rekonstrüksiyonu için prefabrik temporal insüler flep: önerilen https://herturbilgi.com/betwon-giris-guncel-adres-ve-guvenilir-bahis-deneyimi/ yöntem.
Edythe Summy says:
Roulette Betting Guide 다바오머니
Malinda Glass says:
Exotic Massage OP
Minecraft 1.19: Wild Update says:
It is planned to create a custom script that downloads and configures available resources
required for Minecraft 1.19: Wild Update game.
https://botvet.ru/918-kak-smenit-tarif-na-megafone-.html says:
Эвакуатор-манипулятор будет незаменим а,
https://botvet.ru/918-kak-smenit-tarif-na-megafone-.html если авария отягощена особыми обстоятельствами.
https://onlinenews.eu.com/chudesnaya-priroda-soedinennyh-shtatov-ameriki.html says:
не опасайтесь спрашивать, собираетесь ли вы вычислить, какой опыт у этого агентства
в планировании подобных поездок.
Here is my web blog; https://onlinenews.eu.com/chudesnaya-priroda-soedinennyh-shtatov-ameriki.html
Shenna Swartwood says:
7 Phrases You Can’t Say In Sales 에볼루션 시스템 배팅
Roxanna Hallock says:
Playing Roulette To Win – 8 Strategies Guide You Win Playing Roulette 롤 에볼루션 [evolutionkr.kr]
https://sex-shop-kharkov.top/ says:
Транспорт: Автобус №22, Т29, Троллейбус №42, https://sex-shop-kharkov.top/
727. Остановка Магазин Оптика. Транспорт: Автобус №257.
تنزيل 888starz says:
brazino777 destaca-se pelo número de jogos em slots, para obter uma certa quantia no Brasil. ✅ Blackjack: disponível jogos de azar slots (21), E jogos no blackjack https://karpazir.com/888starz-apk-download/ mesa viva.
certainly says:
corrupt the whole shebang is cool, I advise, people you intent not cry
over repentance! The whole is fine, tender thanks you.
The whole kit works, blame you. Admin, thank
you. Thank you as a service to the great site.
Thank you damned much, I was waiting to take, like never before!
go for super, caboodle works great, and who doesn’t like it, corrupt
yourself a goose, and love its thought!
price says:
come by the whole shooting match is dispassionate, I advise,
people you intent not regret! Everything is sunny,
tender thanks you. The whole works, thank you. Admin, thanks you.
Thank you on the vast site.
Appreciation you damned much, I was waiting to buy,
like not in any degree in preference to!
buy super, all works great, and who doesn’t like it, swallow yourself
a goose, and love its thought!
society says:
buy the whole shooting match is detached, I apprise, people
you transfer not be remorseful over! The whole kit
is fine, as a result of you. The whole shebang works, blame you.
Admin, thank you. Acknowledge gratitude you as a
service to the vast site.
Credit you very much, I was waiting to take, like in no way
before!
buy super, everything works horrendous, and who doesn’t like it, believe yourself a goose, and love its thought!
Carley Griver says:
Night Spa 유흥
Alice Mickey says:
Pub Crawl 알밤
Dorthea Mayne says:
Poker Etiquette – Behavior To Run The Game Smooth 언더월드 2: 에볼루션 출연진
sex-shop-kyiv1.top says:
украсить собой здание через отдельный вход в правую дверь под вывеской Пятерочка, спуститься на цокольный этаж, https://https://sex-shop-kyiv1.top//, sex-shop-kyiv1.
https://sex-shop-dnepr.top/ says:
Вдоль https://sex-shop-dnepr.top/, sex-shop-dnepr.top стены расположен постамат.
при входе слева расположен терминал и постамат.
Karin Crook says:
Urban Nightlife 논현오피
Polly Tardent says:
Happy Hour 대전유흥
Marie Silva says:
A Psychic’s Realistic Video Slot Strategy 에볼루션 카지노 점검
Janis Haly says:
Urban Nightlife HiOP
Adeline Sweatman says:
Whiskey Bar 부산
Leslee Stonehaven says:
Exotic Massage 하이오피주소
Blaine Lowrie says:
Dance Party OP
Roger Hardie says:
Baccarat Betting System – The Best Strategy Revealed Here 라스트 에볼루션 다시보기
Alvaro Torpy says:
Entertainment 유흥사이트; http://Tbot.Co.Kr/Bbs/Board.Php?Bo_Table=Free&Wr_Id=7626,
Sylvester Griffith says:
I really like what you guys are up too. This kind of clever work and exposure! Keep up the very good works guys I’ve incorporated you guys to my blogroll.
Learn how proxies enhance online privacy says:
meanwhile, this https://www.youtube.com/watch?v=_wTprue_lkY is rarely used due to more advanced web filters. tcp interception prerogative only for ip traffic.
Markus De Chair says:
Private Party 선릉오피
Herbert Forbes says:
Best Craps Systems For Casino Craps Games 디지몬 라스트 에볼루션
Lurlene Vogt says:
Cocktail Lounge 하이오피
Mikayla Garnsey says:
Romantic Evening op
Darrin Partlow says:
Social Gathering 광주키스방 – Anime-Share.Ru –
https://getbusinesstoday.com/the-ever-evolving-landscape-of-business-adapting-for-success/ says:
In an apartment building, a https://getbusinesstoday.com/the-ever-evolving-landscape-of-business-adapting-for-success/, these costs are borne by the landlord.
تنزيل 888starz says:
Por trás de nossa análise está uma lista dos aspectos fundamentais que seguimos à letra, https://lifecoachvishalnadda.com/apk-888starz-libya/ especialmente quando fala indo sobre casas de jogo com grátis boas-vindas prêmios.
http://kyevlyn.ukrbb.net/viewtopic.php?f=12&t=14801 says:
за допомогою безаміачної фарби-фільтра Lisaplex filter color відвідувач можете лише за одне нанесення і, найдовше за третину години виключити.
my web-site; http://kyevlyn.ukrbb.net/viewtopic.php?f=12&t=14801
Alvaro Oshea says:
How To Get Cheap Poker Table – 5 In Order To Think About 플래닛 에볼루션: 방치형 클리커
Tyler Kellaway says:
Pub Crawl 대구유흥
Kenny Cohn says:
VIP Experience 부달최신주소
Roxanna Rausch says:
Choosing The Perfect Type Of Poker Chip 다이노코어 에볼루션
https://boryslav.do.am/forum/33-18974-1 says:
Сервисный сбор (расчет за использование сервиса) – 29 ₽, https://boryslav.do.am/forum/33-18974-1 доплата за вес от 15 кг – 60 ₽.
Doretha Tressler says:
Cocktail Bar 유흥
Imogen Kelynack says:
Happy Hour 오피사이트
https://forum.uniformserver.com/topic/9605-tailored-security-for-every-property/ says:
Installing anti-theft grilles on windows makes it difficult for burglars to enter the https://forum.uniformserver.com/topic/9605-tailored-security-for-every-property/ its property.
Curtis Blundstone says:
Spa Therapy 부달사이트
Bessie Bullock says:
Set Of 200 8G Hot Stamped Poker Chips And 4 Card Decks Review 에볼루션 파크
Roderick Brubaker says:
The Evolution Of Slots Games 에볼루션 바카라 그림
https://bonzipal.com/3425b8818?lang=urdu says:
They are printed to all sorts surface with a https://bonzipal.com/3425b8818?lang=urdu gun. thanks to these types of paints you have the opportunity to achieve a variety of decorative wall textures.
Francis Robb says:
Romantic Evening 하이오피사이트
http://tereveni.bestforums.org/viewtopic.php?f=7&t=204 says:
Максимальная скидка 1 тыс. ₽ по предоставленному коду http://tereveni.bestforums.org/viewtopic.php?f=7&t=204 foodshop.
Theron McDavid says:
Speakeasy OP
Reta Fowell says:
Fun Is Anywhere With Free Slots 에볼루션 KOREA
Erma Monk says:
Karaoke Bar 유흥
Carolyn Meadows says:
The Social Bookmark Submitting A Slot Punch 닌자거북이 에볼루션 시즌1
Teena Linn says:
Social Club 광주알밤 (Ralf)
Connie Bowser says:
Choosing Optimum Slot Machines To Win – Big Slot Machine Payouts 에볼루션 딜러 후기
Call Girls Service in Lahore says:
Lahore’s call girls are available around the clock to meet all your needs, whether you want to have an interesting chat at a party or just relax in your room. These lovely ladies can show you how they can fulfill your wishes, whether they are sweet or a bit more adventurous. No matter what you desire, one of our Lahore call girls can make it happen!
Call Girl in Islamabad says:
Our call girls in Islamabad are truly some of the most beautiful and thrilling women in Pakistan. If you’re a guy looking for the ideal busty call girl, hiring an escort can fulfill all your wishes! A skilled independent busty escort can provide companionship and meet your needs while giving you the freedom to enjoy other activities during your visit. If you’ve never used escort services before, why not schedule a meeting with one of our call girls tonight?
Call Girls Service in Karachi says:
We offer a wide variety of girls to choose from, so you’re sure to find someone who matches your style. We have Independent, VIP, Hot & Sexy, Celebrities, Russian call girls in Karachi, and many more, all set to meet you whenever you want. Our agency is open 24/7 and promises to be at your door in 30 minutes or less. We want your time with us to be amazing, so don’t hesitate to call us right away!
Richie Kellermann says:
Make Your Money Last Inside Online Casino 스피더 에볼루션 661
Skye Bannerman says:
5 Explanations You Should Stop Trying To Find A Look At Home Job 에볼루션 마틴
Iris Weinstein says:
Fast Money Using An Instant Bad Credit Personal Loan 다바오 취사 가능한 호텔
James Dowie says:
Once Upon A Amount Of Time In Online Gambling 플레이시트 에볼루션
Kelle Wymark says:
Top 10 Online Games For Beginners And Advanced Casino Gamers 힙합 에볼루션 (classifieds.ocala-news.com)
Michaela Taylor says:
Winning Roulette Systems – Have You Tried The Banned Roulette System? 에볼루션 바카라 플레이어 보너스 – http://www.optionshare.tw,
Shona Bouchard says:
Various Gambling Online Sites 랜서 에볼루션 11세대
Herbert Didomenico says:
Luxury Lounge 서울유흥 (Oren)
Bobbye Dowler says:
Speakeasy 오피사이트
Frederic Goodfellow says:
Body Massage 울산유흥 (https://telegra.ph/Facial-Rejuvenation-Surgical-Procedure-11-07)
https://aitoolsexplorer.com/ai-tools/owlity-autonomous-ai-testing-for-qa/ says:
Richard is a master in artificial intelligence (AI), specialist in https://aitoolsexplorer.com/ai-tools/owlity-autonomous-ai-testing-for-qa/ speakers and a podcast host.
Arleen Hinton says:
Urban Nightlife budal
Maurice Giron says:
Night Spa 유흥 (http://Yixiaolian.blog115.fc2.com/)
Margot Burkholder says:
Fine Dining 밤문화 – https://Securityholes.science/wiki/Wiltshire_Link_Group_Transport_Listing,
hiro.su says:
Длина линии заявляет об этом, https://https://hiro.su// насколько развит интеллект и интерес к анализу.
Allie Conforti says:
Private Club HiOP
Lavina Miles says:
Hello to all, how is all, I think every one is getting more from this web page, and your views are fastidious for new viewers.
Anderson Welsby says:
Private Party 대전유흥
Hilton Jersey says:
The Humble Business Card 다바오 포커 하는법
Epifania Akhtar says:
International Bank Transfers Explained 다바오 포커 머니 상
Magaret Tait says:
Pretty great post. I just stumbled upon your blog and wished to mention that I have really enjoyed surfing around your weblog posts. In any case I’ll be subscribing for your feed and I’m hoping you write again soon!
Daniela McCollom says:
VIP Lounge 서울유흥
Ruby Naquin says:
Exclusive Nightlife HiOP
Deana Trammell says:
Spa Therapy HiOP
Glenda Pickard says:
Happy Hour 오피사이트
Daniele Fewings says:
Making Real Cash At Online Roulette Games 에볼루션 라이트닝 가입 코드
brians club says:
This blog is not just about the content, but also the community it fosters I’ve connected with so many like-minded individuals here.
Anonymous says:
Amunra Casino has taken my online gaming experience to new heights! The graphics are sharp and engaging, truly creating an immersive environment. There’s a fantastic variety of games to choose from, and their live casino is an absolute gem. I appreciate their quick withdrawals and fantastic customer service; it just adds to the convenience. Highly recommended!
Kaylene Claborn says:
7 Lean Marketing Laws For The Inspired Entrepreneur 스피더 에볼루션 661
Valerie Serrato says:
Shopping For Mortgage Loan 다바오 충전하는법
https://stalinarch.ru/wiki/index.php/Activador_office says:
Tambien podras works and leads the association, tanto de manera,
a local resident, remote from house, in fortress, https://stalinarch.ru/wiki/index.php/Activador_office and organizer of receptions from relatives and by specialists
in the office.
Susana Borowski says:
Review About Slot Badge Scanner 헝그리 샤크 에볼루션 (trade-britanica.trade)
Mollie Bucher says:
Exotic Massage 하이오피사이트
Audrea Enyeart says:
Night Out 하이오피사이트
Nina Cage says:
Poker Odds And Probabilities 다바오머니상
Deon Kovach says:
Relaxation Therapy BUDAL
Mittie Wehrle says:
VIP Lounge 부달사이트
pinco casino онлайн says:
Помимо ethereum, другими монетами, используемыми для криптовалютных игровых развлечений, являются bitcoin, litecoin, https://pincocasino-pinup-typ6.buzz/ dogecoin и bitcoin cash.
Ophelia Nilsen says:
Poker Deposit Bonuses 2ace 다바오
https://pinco-casino-online-gof8.buzz/ says:
Чтобы обойти стопы на использование, pinco casino рабочее зеркало предлагается использовать безопасные методы обхода блокировки и зеркало.
Have a look at my blog … https://pinco-casino-online-gof8.buzz/
Hilario Loggins says:
Cocktail Bar OP
Major Foster says:
Pub Crawl 유흥사이트 (donaldvision.Nayaa.co.Kr)
p672 says:
Наслаждайтесь своей первой доставкой без оплаты при прохождении
регистрации.
Stop by my web blog … p672
Mahalia Bracy says:
Happy Hour 광주유흥
Ardis Humphrey says:
How To Help Keep Cutting Edge In Online Business 에볼루션 게이밍
Curt Denison says:
Luxury Lounge 광주오피
акробатическое шоу веселый роджер says:
Акробатическое шоу — это захватывающее представление, сочетающее в себе мастерство, грацию и смелость. В нём участвуют профессиональные акробаты, воздушные гимнасты и танцоры, которые демонстрируют невероятные трюки и синхронные движения.
Зрители смогут насладиться яркими номерами, посетив https://suteam.ru/sportivnye-shou/akrobaticheskoe-shou.html в которых сочетаются различные стили и направления акробатики. В программе представлены уникальные комбинации элементов, такие как партерные и воздушные поддержки, силовые и динамические упражнения, а также сложные акробатические связки.
Акробатическое шоу — это отличный способ провести время, получить массу положительных эмоций и зарядиться энергией.
пинко зеркало рабочее на сегодня says:
В ее предложенных полях следует пометить цифры мобильной связи, https://pinco-official-site-rus4.buzz/ адрес email плюс пароль.
https://pinup-vf-z7vk.click/ says:
оформить подписку на новостную рассылку и активно делать ставки, pinco casino тогда промо периодически будут приходить на е-мейл.
Also visit my webpage – https://pinup-vf-z7vk.click/
pinco casino онлайн says:
в процессе турнира игрокам необходимо следить за своим положением в таблице лидеров, https://pin-up-casino-site.top/ которая обновляется в настоящем.
pinco играть says:
Особенно приветствуется возможность внесения средств наличными, к примеру через терминалы.
Feel free to visit my blog post; https://pincocasino-pin777.xyz/
https://bookcrossing.ru/users/58225 says:
As https://bookcrossing.ru/users/58225 2007, 30% of the total residents lived in the Sun Belt America, then as at the beginning of the 20th century in it.
https://pinco-casino-hhd4.xyz/ says:
среди них – фиксированные ставки, pinco casino зеркало где обязательно ставить одинаковые пари на протяжении всей игровой сессии.
Have a look at my web blog … https://pinco-casino-hhd4.xyz/
https://pin-up-casino-2021.xyz/ says:
Высокий rtp предполагает, что преимущество пинко казино официальный сайт ниже, что потенциально увеличивает вероятность участника на.
My web blog :: https://pin-up-casino-2021.xyz/
888starz ci says:
في الكل قطاع الطرق المسلحة واحدة هناك رموز إضافية ، مثل رموز البرية ، رموز مبعثر أو رموز مكافأة ، بالإضافة إلى التقليدية https://vav.com.my/888starz-cote-divoire-plus-grands-prime-ou-criteres-en-compagnie-de-la-capitale/ الرموز.
https://dzen.ru/a/ZzW1Z9uQtEwqYvNH says:
если в срок не затормозить эти процессы,
https://dzen.ru/a/ZzW1Z9uQtEwqYvNH то внешние изменения, и нехватка
вещества будет ярко выражена уже к 40 годам.
Купить мебель недорого says:
Обов’язкові атрибути-стіл https://www.4595.com.ua/list/502209 і комфортне крісло.
1хбет зеркало says:
Рейтинг легальных букмекеров – основной показатель в подборе https://sovsut.ru беттинговой площадки.
spela casino utomlands says:
slot planet: 22 välkomstspins I dead or alive utan investering handpenning i en https://utlandskacasino.io/.
Замена аккумулятора на смартфоне в Тюмени says:
ремонт в день обращения, в подходящее для вас время.
Звоните, Замена аккумулятора на смартфоне в Тюмени отремонтирую прямо
сейчас.
gold ira companies near me rated says:
Excellent read, I just passed this onto a friend who was doing a little research on that. And he just bought me lunch as I found it for him smile Thus let me rephrase that: Thank you for lunch!
trusted ira companies for retirement gold investments says:
I like this website very much so much superb information.
Https://Lovewiki.Faith/Wiki/Best_Rated_Gold_IRA_Companies_A_Comprehensive_Review says:
Thanks so much for providing individuals with an extraordinarily brilliant possiblity to check tips from this site. It’s always very useful and jam-packed with amusement for me personally and my office fellow workers to visit your blog particularly 3 times every week to read the latest secrets you have got. And lastly, I’m actually astounded with the impressive thoughts served by you. Some two ideas in this post are essentially the most effective we have had.
casino utan svensk licens says:
Men viktigt kom ihåg att liknande spel inte befinner sig under driften i den svenska lagstiftningen om kortspel, och detta betyder att https://casinoutanlicenssverige.bet/ är inte ge samma grad skydd av konsumenters, som kasinon med svensk licens, till och.
https://dzen.ru/a/ZzZPvyyJ6gkAwU3o says:
Любителям драйва и скорости мы сможем предложить в
ассортименте десятки суперкаров знаменитых итальянских брендов,
включая ferrari,.
My web-site … https://dzen.ru/a/ZzZPvyyJ6gkAwU3o
casino utan licens says:
deras kompetens är delvis skapad av arbete, i olika spelbolag, https://casino-utan-licens.biz/, och också på det {det faktum att {de|modellerna} {fungerade|arbetade|utförde sina funktioner} i spelstudior som producerade {online|Internet} Spel.
Jaxon Heady says:
Spa Therapy 인천유흥
Ismael Waterman says:
Burlesque Show 역삼오피
Betsy Danielson says:
Late Night Fun 광주유흥 (Rosetta)
Claire Labarre says:
Live Music 부달최신주소
https://dzen.ru/a/ZzZT3GZTQXbg0IYN says:
каждая сделка аренды сопровождается оформлением между собственником транспорт и арендатором.
Also visit my blog – https://dzen.ru/a/ZzZT3GZTQXbg0IYN
Shantell Bastow says:
Social Gathering 유흥사이트, http://Elektroavto.Lv/,
Gia Dutton says:
Exotic Massage budal
Esteban Tost says:
Social Club 강남오피
Lavada Cabral says:
Swedish Massage 하이오피주소
Mandy Alfonso says:
Signature Drinks 출장마사지 (Rosalinda)
Rudy Willie says:
Wine Tasting 광주키스방 (Mira)
Tammi Cawthorne says:
Caronomics – Dealing With All The Loan Issue 다바오 교도소 폭동사건
Aviator Game says:
Since digital portals do not have such additional
expenses, Aviator Game can afford offer
their gamblers the best odds.
Tracee Glennie says:
Why Play At Small Poker Website Pages? 다바오 머니 분양
Elvira Bristow says:
Signature Drinks 광주알밤
Trina Durgin says:
Техосмотр на Московском шоссе, СПб стал проще, чем когда-либо . На Московское шоссе, СПб работает надежный центр техосмотра, где водители могут проверить свои автомобили . Профессионалы гарантируют соблюдение всех требований .
Для проверки автомобиля на Московском шоссе , необходимо обратиться в специализированный центр. Водители оценят удобное расположение пункта . Быстрая и качественная диагностика позволит вам сэкономить время .
Техосмотр на Московское шоссе, СПб проводится в соответствии с законодательством . Пункт оснащен современным оборудованием , что делает проверку надежной и быстрой. Проходите техосмотр на Московском шоссе уже сегодня .
Ralph Caban says:
Body Massage 오피
Mackenzie Kalb says:
Baccarat Betting System – The Best Strategy Revealed Here 에볼루션 블랙잭 룰
Dale Oquinn says:
Relaxation Therapy op
Chance Koerstz says:
How To Read An Offshore Bank Account As A United States 다바오 회원가입
боливуд казино says:
Болливуд https://dogtrener.ru/
Индийская индустрия развлечений известна своим блеском и яркими эмоциями. Здесь каждый может найти что-то для себя. Зрители влюбляются в музыку, танцы и увлекательные сюжеты. В таких местах также существует особая атмосфера, где азартные состязания обретает новый виток. Эти пространства притягивают внимание не только любителей стиля и драмы, но и тех, кто ищет возможность испытать свою удачу.
Уникальное сочетание
В таких местах пересекаются азарт и роскошь. Огромные залы, наполненные яркими огнями и мелодиями, создают атмосферу веселья. Игровые автоматы, столы для карт и другие виды забав завлекают игроков. Тут можно встретить людей со всех концов мира, каждый из которых приносит свою историю и мечты.
– Здесь всегда царит волнение.
– Каждая игра – это приключение.
– Улыбки и волнение на лицах участников.
Когда игроки садятся за столы, они забывают о повседневной рутине. Их притягивают не только деньги, но и сама атмосфера. Участники обсуждают тактики и стратегические ходы, пытаясь оценить шансы на успех. И это объединяет людей, ведь в мире удачи, как и в кино, каждый находит свою роль. Иногда даже самые простые игры могут подарить незабываемые ощущения, заставляя сердца биться быстрее, а глаза сиять от восторга.
Звезды и их влияние
Ни для кого не секрет, что популярные личности играют немаловажную роль в создании таких пространств. Их участие и поддержка делают атмосферу еще более привлекательной. Знаменитости приходят здесь, чтобы развеяться и провести время с близкими. Это обогащает культуру и привлекает внимание публики. Кроме того, создается впечатление, что участие звезд добавляет игре особый шарм, цельности и неповторимости.
– Ищите удачу, и она не заставит себя ждать.
– Занимайтесь любимым делом, и выигрыш придет.
– Наслаждайтесь каждый момент, играя с друзьями.
Каждый вечер здесь собрана аудитория, жаждущая острых ощущений и незабываемых моментов. Погрузившись в мир захватывающих конкурсов, легко терять отсчет времени. Именно здесь азартные игры становятся не просто развлечением, а настоящим искусством. Играя с умом и наслаждаясь процессом, участники могут раскрыть для себя множество интересных сторон подобного досуга.
Будущее развлечений
Смотря в будущее, можно ожидать, что такие заведения продолжат развиваться и масштабироваться. Они будут привлекать все больше людей благодаря креативным подходам и новым идеям. Как в кино, где каждый фильм неповторим, так и в этих местах, каждая игра обещает быть уникальной.
И, возможно, азарт в этих незабываемых уголках станет неотъемлемой частью жизни многих, кто ищет не только развлечения, но и яркие эмоции на каждый день. Будучи переполненными счастьем, все участники будут стремиться еще раз вернуться за океан удовольствия и азарта.
Культура азартных игр в Индии
Азартные игры в Индии имеют богатую и многогранную историю. Это явление затрагивает различные аспекты общества. Игры привлекают внимание, вызывают эмоции и создают целые сообщества. Люди увлечены азартом, который, как известно, может захватить. При этом существуют свои традиции и уникальные особенности.
На протяжении веков азартные игры были неотъемлемой частью индийской культуры. Участие в ставках и конкурсах стало важным элементом местных праздников. Люди собираются для этого в кругу друзей или семьи. Соревнования по картам или другим видам досуга создают возможность для общения и сближения. Однако в современном мире влияние азартных игр изменилось.
Сегодня это коммерческое явление, которое регулируется законом. Каждый штат имеет свои правила и ограничения. Некоторые территории полностью запрещают азартные игры, в то время как другие принимают законы, легализующие их. Это создает ситуацию, когда люди могут открыто участвовать в подобных развлечениях. С каждым годом меняются и взгляды на подобную деятельность.
Когда речь заходит о культурных аспектах, невозможно не упомянуть о влиянии медиа. Фильмы и телевизионные шоу акцентируют внимание на жизни игроков. Они изображают не только успех, но и возможные проблемы. Это формирует общественное восприятие и влияет на решение многих людей. Таким образом, азартные игры становятся не просто развлечением, но и важной частью обсуждения в обществе.
Имеет значение и то, как азартные игры вписываются в повседневную жизнь индийцев. Ставки на спортивные события или игры с друзьями часто происходят в расслабленной атмосфере. Это не всегда связано с большими деньгами, скорее с самим процессом и взаимодействием. Конфликты и радости накладываются друг на друга, делая культуру азартных игр многогранной и интересной. Тем не менее, важно помнить о рисках и последствиях.
nätcasino utan svensk licens says:
genom vår mobil programvara, vi vill så att våra spelare kan njuta spelet var som helst och när som helst i https://casino-utan-svensk-licens.bingo/.
купить в киеве шкаф купе says:
в нашем ассортименте вы сможете отыскать данная мебель, который сможет удобным и красивым элементом дизайна, https://eduvzn.com/dostavka-mebeli-po-kievu_412596.html а.
satta king says:
good luck admin. It was a really good article.
http://ukr-vestnik.com/interesting/rezonans/navishho-potriben-spetsodyag-i-yaki-osnovni-funktsiyi-vin-vikonuye.html says:
свое производство.
Also visit my blog http://ukr-vestnik.com/interesting/rezonans/navishho-potriben-spetsodyag-i-yaki-osnovni-funktsiyi-vin-vikonuye.html
bettingsidor utan svensk licens says:
At the Potawatomi https://casino-utan-licens-sverige.bet/ constantly available something special – from gourmet dinners to unique fun meetings and fun.
https://www.06278.com.ua/list/501548 says:
Уверены, Вы откроете для себя новый мир изумительно вкусными роллами, сочетающими в себе огромное количество различных вкусных.
My web blog – https://www.06278.com.ua/list/501548
Ремонт телефонов в Тюмени says:
мы предоставляем гарантированность до 3 месяцев.
Look at my site https://repair-one.ru/Servis-telefonov
Новости казакстана Fanday.kz says:
по указанному мнению, это может быть членство в альянсе, Новости казакстана Fanday.
Here is my blog; https://oinet.kz/e/action/ShowInfo.php?classid=1&id=60050
Найкращі казино з 18 років says:
не забувайте стежити за власним рангом у системі лояльності: він викладає підхід до бонусів, https://www.62.ua/news/3765826/so-potribno-znati-novackovi-pro-azartni-igri які неможливо.
казино України says:
в ігрових автоматах на гривні ножів може виявитися з однієї до сотень а також https://www.62.ua/news/3738384/ak-bezkostovno-pograti-v-azartni-igri-v-interneti тисяч.
эвакуатор манипулятор says:
Оплату принимаем наличными, https://autoru24.ru/ банковской картой и через продолжительное время.
https://icenet.net.ru/ says:
Подключение и настройка smart-устройств, наподобие умные колонки, умные телевизоры, умные розетки и другие устройства, домашний интернет.
Feel free to visit my web-site; https://icenet.net.ru/
Найкращі казино з 18 років says:
все, що необхідно – ваше ноутбук і вихід в Інтернету https://fraza.com/uk/news/331494-jak-dotrimuvatis-pravil-vidpovidalnoji-gri-v-kazino Інтернет.
https://users.playground.ru/5481657/ says:
по его мнению, и Рами бар Хана, и Рав Шешет согласны, что играть в https://users.playground.ru/5481657/ запрещено.
Gisele Tyas says:
Wow, fantastic blog layout! How long have you been blogging for? you made blogging look easy. The overall look of your web site is magnificent, as well as the content!
canlı casino masaları says:
zafer için şansınızı artırmak , çok şey ifade ediyor seçmek slotlar yüksek faiz ödemelerle, kontrol etmek banka hesabınız, https://fransizcakursuankara.com/basaribet-casino-incelemesi-bilmeniz-gereken-her-sey/, bonuslardan yararlanın/ bonuslardan yararlanın ve promosyonlardan yararlanın ve.
https://www.60bit.ca/forum/business-forum/what-s-the-best-deal-for-windows-software says:
This is a comprehensive web application includes a complete ecosystem of design tools what will help you significantly optimize processing process development these applications and work in format present time over wireframes, layouts, diagrams,.
Check out my web-site https://www.60bit.ca/forum/business-forum/what-s-the-best-deal-for-windows-software
casino 365 vip club says:
sin embargo somos nunca estúpidamente hilarantes.
elige/ encuentra tu juego de muchos juegos en línea-casino 365 vip club, como virtual máquinas,
blackjack y ruleta.
p869 says:
Чтобы определить, какому классу принадлежит продукция, нужно воспользоваться Постановлением Госстандарта РФ №405-ст от 06.11.
my homepage :: http://kryto.ukrbb.net/viewtopic.php?f=2&t=413&p=869&hilit=%D0%B3%D1%80%D1%83%D0%B7
мелбет официальный сайт says:
Казино находится по юридическому ссылке в Никосии, мелбет официальный сайт на Кипре.
mostbet-mstik-ly7b.buzz says:
к ним относятся приветственные бонусы за первый депозит, мостбет бесплатные спины на слотах и
другие акции.
Here is my homepage: mostbet-mstik-ly7b.buzz
https://lcmeasyimmigration.blogspot.com/2020/04/translation-services.html says:
це сталося завдяки постійному розвитку
в області перекладацьких програмного забезпечення і програм контролю
якості.
My website – https://lcmeasyimmigration.blogspot.com/2020/04/translation-services.html
https://mostbet-i4yn.buzz/ says:
Говоря начистоту: кому понравятся нудные
процессы регистрации, мостбет замороченные игры и однообразная тягомотина?
Look at my web site: https://mostbet-i4yn.buzz/
mostbet-1tb.top says:
Вращайте казино, мостбет зарабатывай монеты и
банкноты – в данной игре всё зависит
только от тебя.
My webpage: mostbet-1tb.top
mostbet-ud.top says:
в рф слот-клубы появились довольно поздно,
лишь только в 1992 году, до того игровые автоматы стояли лишь только в игровых заведениях также.
Look into my web blog – mostbet-ud.top
https://melbet-jg1.top/ says:
9.
My blog … https://melbet-jg1.top/
каталог лічильників валют says:
Професійна сучасна техніка цього типу потрібна не тільки лише великим магазинах і супермаркетам, але також всім, каталог лічильників.
my web site … http://pokerclub2015.ukrbb.net/viewtopic.php?f=4&t=893
мелбет ру says:
Казино Висбадена относится к
перечню мелбет ру старейших в бельгии и франции.
mostbet-town-fljf.buzz says:
Завдяки зручному юзабіліті і простим налаштуванням грати на
гроші в слоти мостбет можуть навіть початківці.
My webpage: mostbet-town-fljf.buzz
https://melbet-jg8.xyz/ says:
на сайте онлайн казино Леонбет доступен внушительный выбор игровых программ, мелбет зеркало который нам приглянулись даже самому.
My blog post; https://melbet-jg8.xyz/
https://infosfera.space/|https://infosfera.space/ says:
тут ви знайдете маса цікавою і потрібної даних про нашому мегаполісі, незалежно тому, {https://infosfera.space/|infosfera.
Feel free to visit my blog post …
https://www.bizcommunity.com/Article/196/363/236507.html says:
your car is the key to all day to take you to the point, where you are https://www.bizcommunity.com/Article/196/363/236507.html.
https://melbet-ja7.top/ says:
Билли Шерберт (billy sherbert / don rickles) – администратор казино «Танжер».
My webpage … https://melbet-ja7.top/
https://www.cypherhunter.com/zh-hant/p/whisp/ says:
from cancer: in state Delaware https://www.cypherhunter.com/zh-hant/p/whisp/ policy in the amount of 70,000 thousand.
Severe illness: B71000 series – in vicinity Delaware,
Policies b71100, b71200, b7130h and b7140h.
Floy Chapple says:
These visitors are often highly engaged and have a high likelihood of converting into customers or clients.
https://melbet-gama4.top/ says:
еще при открытии счета участник игры берет вознаграждения и специальные коды, melbet официальный сайт что при желании используют.
Stop by my website: https://melbet-gama4.top/
продолжение по ссылке says:
а вот руководитель прогностического центра «Метео» Александр Шувалов уверен: с возможностью семидесяти процентов москвичей ждет.
Also visit my web-site – https://sinoptik.in.ua/pogoda/1804208152-ivano-frankivsk-UA
Рука воды says:
Рука воды или гадание по ручке // Тайны ада да его обитатели, или Книга злых духов, волшебства, ворожбы, гадания, заклинаний и пророчеств /.
https://forum.fakeidvendors.com/post/jdc9tgdp69 says:
To register to the application of the melbet loyalty, simply log in, go to tab “My account”, “https://forum.fakeidvendors.com/post/jdc9tgdp69”, navigate to tab “personal account and select”join the club”.
http://p33340zg.beget.tech/2024/12/15/kak-vybrat-idealnuyu-temu-dlya-diplomnoy-raboty-2.html says:
Покупка высшего образования не гарантирует быстрого устройство на работу и уважения в окружении.
Feel free to visit my web blog – http://p33340zg.beget.tech/2024/12/15/kak-vybrat-idealnuyu-temu-dlya-diplomnoy-raboty-2.html
плечевые риги says:
присоединяйтесь к нам и откройте для себя мир
видеотехники плечевые риги без
запретов.
https://avensis.at.ua/forum/24-8973-1 says:
однако для этого следует грамотно подобрать фирму по продаже и производству готового, https://avensis.at.ua/forum/24-8973-1 товарного.
mostbet-oy-d2y2.buzz says:
Оператор чата пришлет подарочный код мостбет к дате именин.
Also visit my web page … mostbet-oy-d2y2.buzz
Virgilio Fusco says:
Thank you for the good writeup. It in fact was a amusement account it. Look advanced to far added agreeable from you! By the way, how could we communicate?
Холм Юпитера says:
всякий ученик имеет определенные четко выраженные персональные качества, https://hiro.su/ruka/xolmy/xolm-yupitera/ и педагоги могут только незначительно изменить.
аркада вход says:
в том случае, если у вас появляются
вопросы, аркада вход вы можете постучаться в поддержку для уточнения статуса транзакции.
marvelbet 777 login says:
https://tpck.org/ ক্লিক সরাসরি ম্যানেজার সেবা.
https://shortenurls.eu/share/984698 says:
in the current realities draftkings possesses the most generous welcome encouragement among other legal https://shortenurls.eu/share/984698 in United States.
Kenny Gellatly says:
you’re actually a just right webmaster. The site loading velocity is amazing. It kind of feels that you’re doing any distinctive trick. Moreover, The contents are masterwork. you’ve done a great task on this subject!
Kaley Casey says:
xbet бонус при регистрации 1xbet promokod
Chelsea and Liverpool have been forced to suspend all advertising with controversial global betting partner 1xBET just a week after Tottenham announced they had terminated their agreement with the gambling firm.
Both Premier League clubs have been contacted by the UK Gambling Commission to advise that they risked being prosecuted under the Gambling Act for unlawful advertising if they continued to use 1xBET logos and promotions because the firm have had their licence suspended in the UK.
The move is a major embarrassment for both clubs, who only this summer announced lucrative deals with the Cyprus-based firm, which is understood to be Russian-owned. It will increase the pressure for government legislation to limit the amount football clubs and players can be used to encourage gambling.
Chelsea and Liverpool have suspended advertising with global betting partner 1xBET
RELATED ARTICLES
Previous
1
Next
Tottenham TERMINATE deal with controversial betting partner… Club-linked firm uses Tottenham stars on adverts… but…
Share this article
Share
After The Mail on Sunday reported on the suspension of 1xBET’s licence in Kenya in July, where the company were using England captain Harry Kane’s image to entice people to gamble, Tottenham revealed that they would be contacting 1xBET to express their concerns.
Tottenham then ended their relationship with the firm last weekend — but that still leaves Chelsea and Liverpool with agreements with the company, although all trace of the firm has been removed from their websites.
The firm’s UK licence was suspended after reports of their websites hosting betting on cock fighting, children’s sport and using pornography to encourage betting.
It comes in the week that Huddersfield were fined by the FA for a shirt-sponsorship stunt with bookmaker Paddy Power and shines further light on the seemingly unhealthy relationships between gambling firms and Premier League clubs, where 10 clubs are sponsored by betting companies.
Liverpool and Chelsea risked prosecution if they continued using 1xBET logos
In the Championship, 17 out of 24 club shirts are sponsored by betting firms. Labour has said that it will outlaw gambling advertising on football shirts if elected.
Both Liverpool and Chelsea are understood to be in discussion with 1xBET, having been made aware of the licensing issues and have agreed to suspend advertising.
But the fact that the firm were able to sign up such major clubs — and also have a deal with Barcelona — appears to be a major lapse of due diligence, given that 1xBET were issued with a ‘cease and desist’ notice by the Premier League itself in December 2017 for illegally streaming Premier League games.
Tottenham have been the first club to act decisively after The Mail on Sunday drew attention to the fact that their licence was suspended in Kenya after the government accused them of being one of the firms responsible for an epidemic in youth gambling.
1xBET were still using large billboard adverts of England captain Kane and Dele Alli to entice customers to gamble in July this year.
1xBET were allowed to use the players’ images even though players and managers are banned by the FA from having their own personal deal with gambling firms. The FA fined Everton’s Yerry Mina for appearing in a Colombian gambling advert.
Labour deputy leader Tom Watson has called on the FA to close the loophole and ban all use of players and managers in gambling averts. ‘Given the levels of gambling addiction in the UK and Kenya, it’s time to make rules about gambling adverts and sponsorships much tighter,’ he told The Mail on Sunday. ‘Fans are bombarded with gambling ads and it’s not right.’
1xBET are investigating how their brand came to be promoted on prohibited sites and have temporarily halted advertising in the UK.
RELATED ARTICLES
Previous
1
Next
Tottenham TERMINATE deal with controversial betting partner… Club-linked firm uses Tottenham stars on adverts… but…
Share this article
Share
ChelseaPremier LeagueLiverpool
Demetrius Lack says:
I all the time used to read post in news papers but now as I am a user of net therefore from now I am using net for articles, thanks to web. olx randki
olx randki
randki facebook
darmowe randki bez opłat
randka
olx randki
randki
randki facebook
darmowy portal randkowy
randki za darmo
darmowe randki
darmowe randki
randki online
randki online
olx randki
darmowe randki
randka
darmowy portal randkowy
darmowe randki bez opłat
darmowy portal randkowy
randki facebook
olx randki
olx randki
randki facebook
darmowy portal randkowy
olx randki
randka
randki
darmowy portal randkowy
darmowe randki
randki
darmowy portal randkowy
randki za darmo
darmowe randki bez opłat
darmowe randki
randki za darmo
olx randki
olx randki
darmowy portal randkowy
randka
randki online
randki
randka
darmowe randki
randka
darmowy portal randkowy
randki online
darmowy portal randkowy
randki
darmowe randki bez opłat
randki za darmo
randki online
olx randki
randki za darmo
randki online
randki facebook
olx randki
olx randki
olx randki
randka
darmowe randki
randki facebook
randki za darmo
randki online
darmowy portal randkowy
randka
darmowe randki bez opłat
randki online
randki facebook
darmowe randki
olx randki
randki
randki online
randki
randki
randki online
darmowe randki bez opłat
darmowe randki
olx randki
olx randki
randki za darmo
randki
randki online
randki facebook
olx randki
olx randki
randki online
darmowy portal randkowy
olx randki
randka
randki za darmo
randki facebook
randki
randki
randki
olx randki
randki online
randki online
randki facebook
randki za darmo
darmowe randki bez opłat
darmowe randki
randki
darmowe randki bez opłat
darmowe randki bez opłat
darmowy portal randkowy
darmowy portal randkowy
olx randki
olx randki
darmowe randki
randka
randki online
olx randki
olx randki
darmowe randki
randka
olx randki
randka
darmowe randki bez opłat
olx randki
randka
darmowe randki bez opłat
darmowe randki bez opłat
darmowy portal randkowy
darmowe randki
randka
darmowe randki
darmowe randki bez opłat
randki za darmo
darmowe randki bez opłat
randka
darmowy portal randkowy
darmowy portal randkowy
darmowy portal randkowy
randka
randki facebook
randki za darmo
darmowy portal randkowy
darmowe randki bez opłat
darmowy portal randkowy
randki online
randki facebook
darmowy portal randkowy
randki za darmo
randki facebook
olx randki
randki online
randki online
olx randki
randki
randki facebook
randka
randki facebook
randki online
randki online
randki facebook
randki online
randki facebook
darmowe randki bez opłat
randki za darmo
darmowe randki
randka
darmowe randki bez opłat
randki online
randki za darmo
randki
olx randki
darmowe randki bez opłat
randki za darmo
darmowe randki bez opłat
randki
olx randki
darmowe randki
randki
randki
darmowe randki bez opłat
darmowe randki
darmowe randki
darmowe randki
darmowe randki bez opłat
darmowe randki bez opłat
randki za darmo
darmowe randki
darmowy portal randkowy
randki za darmo
randka
randka
darmowe randki bez opłat
randki
randki online
darmowy portal randkowy
randka
randki
darmowe randki bez opłat
randki za darmo
randki facebook
darmowe randki
randka
darmowy portal randkowy
darmowe randki bez opłat
olx randki
darmowy portal randkowy
randki za darmo
olx randki
olx randki
olx randki
randki facebook
darmowe randki bez opłat
randka
randka
darmowe randki bez opłat
darmowe randki bez opłat
darmowy portal randkowy
olx randki
darmowy portal randkowy
darmowe randki bez opłat
randki za darmo
darmowy portal randkowy
darmowy portal randkowy
randki
randki
randki facebook
randka
randka
darmowy portal randkowy
darmowe randki
randka
randki facebook
darmowe randki
randki
darmowy portal randkowy
darmowy portal randkowy
olx randki
randki online
olx randki
randki za darmo
darmowe randki bez opłat
darmowe randki
randki za darmo
randki za darmo
darmowe randki bez opłat
randki online
randki za darmo
randki
randki za darmo
darmowy portal randkowy
darmowe randki
darmowe randki
randka
randka
darmowe randki
darmowe randki
olx randki
randki online
randka
olx randki
olx randki
randka
randki
randka
randki za darmo
darmowy portal randkowy
randki online
olx randki
darmowy portal randkowy
darmowe randki bez opłat
darmowy portal randkowy
darmowe randki bez opłat
randki facebook
randka
darmowe randki bez opłat
randki za darmo
darmowy portal randkowy
randki online
randka
randki facebook
randki facebook
randki za darmo
randka
randka
randki online
darmowy portal randkowy
darmowe randki
randki facebook
randki online
randki za darmo
darmowe randki
olx randki
olx randki
darmowy portal randkowy
randki
randki
randki facebook
randki facebook
randki online
randki facebook
randki za darmo
randki
randki facebook
randka
randka
olx randki
randki facebook
randki facebook
darmowe randki
randki
darmowy portal randkowy
randki online
darmowy portal randkowy
olx randki
randki za darmo
olx randki
darmowe randki bez opłat
darmowy portal randkowy
olx randki
darmowe randki
darmowe randki bez opłat
randki online
randki facebook
randki online
randki za darmo
olx randki
darmowe randki
randka
darmowy portal randkowy
randki za darmo
darmowe randki
darmowe randki bez opłat
darmowy portal randkowy
randki online
olx randki
randka
randki za darmo
randki online
darmowe randki bez opłat
randki za darmo
randki
randki facebook
randka
randki
randka
darmowy portal randkowy
darmowy portal randkowy
randka
randki
darmowe randki
randki za darmo
randka
darmowe randki
randki facebook
randki
olx randki
randki online
randki facebook
randka
randki
randki
randki online
darmowy portal randkowy
randka
olx randki
darmowy portal randkowy
randki za darmo
randki za darmo
randki facebook
darmowe randki
olx randki
randki facebook
randki facebook
darmowe randki bez opłat
randki facebook
randki za darmo
darmowe randki
randki za darmo
randki
darmowe randki bez opłat
darmowy portal randkowy
olx randki
darmowe randki
randki za darmo
darmowe randki
randka
darmowy portal randkowy
randka
darmowy portal randkowy
randki za darmo
randka
darmowe randki
randka
darmowy portal randkowy
randki online
randki online
olx randki
darmowy portal randkowy
randka
darmowy portal randkowy
olx randki
darmowy portal randkowy
darmowy portal randkowy
randki online
randki facebook
olx randki
darmowe randki
randki online
randki online
darmowy portal randkowy
randki facebook
olx randki
randki
darmowy portal randkowy
randka
randki facebook
randki online
randki
darmowy portal randkowy
darmowe randki bez opłat
darmowy portal randkowy
randki za darmo
randki
randki
darmowe randki bez opłat
randka
darmowe randki
randka
randki
olx randki
olx randki
darmowe randki bez opłat
darmowe randki
randki za darmo
randka
randki
randki
randki za darmo
darmowy portal randkowy
darmowy portal randkowy
darmowe randki bez opłat
olx randki
darmowe randki bez opłat
randki za darmo
randki za darmo
olx randki
randki online
olx randki
randki facebook
randki za darmo
randki za darmo
randki facebook
darmowe randki
randki online
randki
randki za darmo
randki
olx randki
olx randki
randki facebook
randki online
randki za darmo
randki facebook
randki facebook
randki online
darmowy portal randkowy
darmowe randki bez opłat
randki facebook
darmowe randki bez opłat
randki
darmowe randki bez opłat
randka
randki facebook
randki za darmo
randki za darmo
darmowe randki
darmowy portal randkowy
darmowe randki bez opłat
randki facebook
randki online
darmowe randki bez opłat
darmowe randki bez opłat
darmowe randki
olx randki
randka
randki facebook
darmowe randki
randki
randka
randki
darmowy portal randkowy
randki za darmo
randki online
randki online
darmowe randki bez opłat
darmowe randki
randka
randki online
randki
randki facebook
randki za darmo
randki online
randka
randka
randki online
olx randki
darmowe randki bez opłat
darmowe randki bez opłat
darmowy portal randkowy
randki online
darmowy portal randkowy
randka
randki za darmo
randka
randki
randki online
darmowe randki bez opłat
randki online
randki
randki facebook
randki online
randki za darmo
darmowe randki bez opłat
darmowe randki bez opłat
olx randki
darmowe randki bez opłat
darmowe randki
olx randki
darmowy portal randkowy
olx randki
randki facebook
randki online
darmowe randki bez opłat
darmowe randki
randki facebook
darmowe randki
randki facebook
randki
darmowy portal randkowy
olx randki
olx randki
randki za darmo
randka
darmowy portal randkowy
darmowe randki bez opłat
darmowe randki
darmowy portal randkowy
randki za darmo
randki online
randki online
darmowe randki
randki za darmo
randki za darmo
randki online
randki
darmowe randki bez opłat
randka
darmowy portal randkowy
darmowe randki
randki
olx randki
randki za darmo
randki
randki za darmo
randka
randka
randka
darmowe randki
darmowe randki
darmowy portal randkowy
randki online
randka
randka
olx randki
randki
randki
randki
randki za darmo
darmowe randki bez opłat
randki
randki
randki online
olx randki
olx randki
randki za darmo
randki za darmo
randki facebook
darmowe randki bez opłat
darmowe randki
darmowe randki
darmowe randki
darmowe randki bez opłat
randki
randki
randka
olx randki
darmowe randki
darmowe randki bez opłat
randki facebook
olx randki
olx randki
randki
randki facebook
darmowe randki
randki online
randka
darmowe randki bez opłat
randki za darmo
randki za darmo
olx randki
randki facebook
randka
darmowe randki
randka
darmowe randki
randki online
randki facebook
randki
randka
randki za darmo
darmowe randki bez opłat
randki
randka
olx randki
randki
randki za darmo
randki online
randka
darmowe randki
randki facebook
darmowe randki bez opłat
randka
randki online
randki za darmo
randka
darmowe randki
darmowe randki bez opłat
olx randki
randki
randki facebook
randki online
randki za darmo
randki online
randki za darmo
randki facebook
randka
darmowe randki
darmowy portal randkowy
randka
olx randki
darmowe randki
randki za darmo
darmowe randki bez opłat
randka
darmowe randki
randki online
randki za darmo
randki facebook
randki
darmowe randki bez opłat
randki facebook
darmowy portal randkowy
olx randki
randki facebook
darmowe randki
randki za darmo
randki za darmo
randki facebook
olx randki
randki facebook
darmowy portal randkowy
randki facebook
randka
darmowe randki bez opłat
randki online
randki
randki
randki online
darmowy portal randkowy
darmowe randki
randka
randki za darmo
randka
darmowe randki bez opłat
darmowy portal randkowy
randka
randka
darmowe randki bez opłat
randki online
olx randki
randki online
randki facebook
randki za darmo
olx randki
randki online
randki facebook
darmowe randki
darmowy portal randkowy
randki za darmo
randka
darmowe randki
randki
olx randki
randki za darmo
olx randki
randka
darmowe randki
darmowe randki
randki
randki facebook
randki online
randki
darmowy portal randkowy
randki facebook
darmowy portal randkowy
darmowy portal randkowy
olx randki
olx randki
randki za darmo
randki
randki online
randki za darmo
darmowy portal randkowy
randka
olx randki
randki online
darmowe randki bez opłat
randka
olx randki
darmowe randki bez opłat
darmowe randki bez opłat
darmowe randki bez opłat
randki facebook
darmowe randki bez opłat
darmowe randki bez opłat
randki online
darmowe randki
randki
randki
darmowe randki bez opłat
darmowe randki
randki online
randki facebook
darmowe randki
randka
randki
randki
darmowy portal randkowy
darmowe randki
randka
darmowy portal randkowy
randki facebook
randki online
randki facebook
randki
darmowe randki bez opłat
olx randki
olx randki
randki facebook
darmowy portal randkowy
randki facebook
darmowe randki bez opłat
darmowe randki bez opłat
darmowe randki bez opłat
randki online
darmowe randki
randki facebook
randka
darmowe randki
darmowe randki bez opłat
olx randki
randki facebook
randki
randka
randka
randki facebook
darmowy portal randkowy
randki
darmowe randki
randki online
randki
randki za darmo
darmowe randki
randki
darmowe randki
randki
randki za darmo
randki
darmowy portal randkowy
randki
randki za darmo
darmowe randki bez opłat
randki
randki za darmo
randki online
randki za darmo
darmowy portal randkowy
randki za darmo
randki
olx randki
randki za darmo
randki online
randki
randki online
randki za darmo
darmowy portal randkowy
randka
olx randki
randki za darmo
darmowe randki
darmowe randki
randki za darmo
randki facebook
randki facebook
darmowe randki
darmowe randki bez opłat
randki za darmo
randki online
darmowe randki bez opłat
randka
randki online
darmowy portal randkowy
randki za darmo
darmowe randki bez opłat
randka
darmowe randki
randki online
darmowe randki bez opłat
darmowy portal randkowy
darmowy portal randkowy
darmowe randki
olx randki
randki za darmo
randki za darmo
randki
randki online
randka
randki facebook
darmowe randki
randki facebook
olx randki
randka
randka
darmowe randki
darmowe randki bez opłat
randki za darmo
randki
randki facebook
randki facebook
randki za darmo
darmowe randki bez opłat
randki facebook
olx randki
darmowe randki
darmowe randki
olx randki
darmowe randki
randki online
randki facebook
randki za darmo
olx randki
darmowy portal randkowy
darmowy portal randkowy
darmowe randki bez opłat
randki facebook
olx randki
darmowe randki
randki online
olx randki
darmowy portal randkowy
darmowe randki
olx randki
randki za darmo
randka
darmowe randki bez opłat
randki za darmo
randki online
randki za darmo
randka
darmowy portal randkowy
darmowy portal randkowy
darmowy portal randkowy
darmowe randki
randki za darmo
darmowe randki
randki online
darmowe randki bez opłat
randki za darmo
randki online
randki
randki za darmo
randki online
randka
randki facebook
randki online
randka
darmowy portal randkowy
darmowe randki
randki za darmo
randki facebook
darmowe randki bez opłat
olx randki
darmowe randki bez opłat
randka
randki facebook
randki za darmo
darmowe randki
darmowy portal randkowy
wafflestoken.com says:
“our managers are can to be one of the first in USA, where the payment service will is available inside 2025 along with additional improvements to urban payment services,” said Nikhil Patel, treasurer of the https://https://wafflestoken.com// exchange.
https://pbase.com/aamirsaleem3066/image/175127905 says:
Cross-platform compatibility: cloudpano offers communication with the project on several devices, https://pbase.com/aamirsaleem3066/image/175127905, therefore customer do not have to worry about your visitors.
costofstemcell.com says:
Here is my web site https://costofstemcell.com/
https://securitysenses.com/posts/instagram-mobile-proxies-boost-your-social-media-marketing-better-account-management says:
A reliable https://securitysenses.com/posts/instagram-mobile-proxies-boost-your-social-media-marketing-better-account-management must have reliable security features, like encryption and protection from ddos attacks.
Madge Pesina says:
It’s amazing to pay a visit this web page and reading the views of all mates about this post, while I am also keen of getting know-how.
ทดลองเล่นสล็อต says:
Wow quite a lot of amazing info!
https://www.stemcellscost.com/ says:
272.Patsalias A., Kozowska Z. https://www.stemcellscost.com/ Personalized medicine: stem tissues, in the cure of colorectal cancer.
https://theinscribermag.com/the-ultimate-guide-to-buying-socks5-proxies/ says:
There is also https://theinscribermag.com/the-ultimate-guide-to-buying-socks5-proxies/ like.
http://applyingthought.wikidot.com/the-excitement-of-virtual-reality-pornography says:
XXX http://applyingthought.wikidot.com/the-excitement-of-virtual-reality-pornography, free porn, hot online porn, xxx indian, xxx xxx movies, Indian Uzma Bukhari, is here to publish various secret porn movies/clips and only for set eyes!
Valentina Morse says:
This is really attention-grabbing, You are a very skilled blogger. I’ve joined your feed and look forward to looking for more of your fantastic post. Additionally, I have shared your web site in my social networks
https://itest.com.ua/statti/testuvannya-verstky-saytu/ says:
Очевидно лише тільки то, що вона цікава, https://itest.com.ua/statti/testuvannya-verstky-saytu/ з неповторним дизайном і” шкільним ” гумором.
факоэмульсификация катаракты says:
Ему принадлежат особые заслуги в раскрутке теории и практики гидростатики и гидродинамики глаза, https://zrenie.dp.ua/services/fakoemulsifikatsiia-s-implantatsiei-gibkoi-iol.
Vickie Keefer says:
Because the admin of this site is working, no question very quickly it will be renowned, due to its feature contents.
stemcelltherapyprice.com says:
research in sphere of stem cells. The Council of the Turkish Academy of Sciences has established the “tÜba Stem Cell Working Group”, which includes representatives of various disciplines involved in assessing the https://https://stemcelltherapyprice.com//.
https://www.google.be/url?q=http://www.tisipara.com/members/curveronald87/activity/149941/ says:
The head coach of a football application in Colorado has been fired and today is facing with industrial consequences due
to the ongoing investigation of https://www.google.be/url?q=http://www.tisipara.com/members/curveronald87/activity/149941/.
https://stemcelltherapyus.com/ says:
need whether additional high-quality research for https://stemcelltherapyus.com/ is needed. they more may to be obtained immediately from bone marrow, fatty modern materials or cerebrospinal fluid of the patient.
add steam authenticator says:
If cockroaches none in chart or none of the solutions helped, https://steamdesktopauthenticator.io/ will send notification about the problem to issue tracking system.
myceliumwallet.io says:
Harris, Craig (June 10, 2021). “https://https://myceliumwallet.io// becomes an option for some workers’ 401(k) retirement plans, the wsj reports.”
steam authenticator скачать says:
starlink provides satellite connection internet in low-maintenance areas of the planet, https://steamdesktopauthenticator.me/, or services at reasonable prices in more urbanized districts.
steam desktop authenticator github says:
steam will send you: text messages-code for assurance https://authenticatorsteam.com/. Enabling steam guard mobile authenticator is a affordable process that is essential enhances security personal personal record.
Angelina Linsley says:
You actually make it seem so easy with your presentation but I find this topic to be really something which I think I would never understand. It seems too complex and extremely broad for me. I am looking forward for your next post, I will try to get the hang of it!
add steam authenticator says:
при подсоединении аутентификатора, steam высылал вам код восстановления, https://steamauthenticator.ru/ который вы должны были указать на листике.
Erica Tuttle says:
If some one wishes to be updated with hottest technologies then he must be pay a visit this web page and be up to date everyday.
steam guard authenticator скачать says:
Vogel, Stephanie (November 9th, https://steamauthenticatordesktop.com/ 2018). “the game program Awards will be broadcast on 50/40/60 global video networks.
Della Arroyo says:
of course like your web site but you need to test the spelling on quite a few of your posts. Many of them are rife with spelling problems and I find it very troublesome to inform the truth on the other hand I’ll definitely come again again.
https://саженцы74.рф/users/152?wid=803 says:
даже самый честный рейтинг казино не знает https://%D1%81%D0%B0%D0%B6%D0%B5%D0%BD%D1%86%D1%8B74.%D1%80%D1%84/users/152?wid=803 аварийную обстоятельства.
Carlo Overton says:
Buy Herpafend (https://herpafend-try.com) After having problem with episodes for an extended period, I was close to losing hope in discovering an efficient remedy. Nonetheless, Herpafend has me. I saw substantial improvements in just a few weeks – the frequency of episodes decreased considerably. What collections Herpafend apart is that it not just reduces signs but additionally seems to target the underlying concern. The extra resistance support it supplies is a terrific added advantage. I am additionally impressed by the company’s transparency relating to active ingredients and use guidelines, revealing their devotion to developing a thoughtful item.
Andrew Liu says:
تتنوع أساليب الأثاث الحديث بين الأنماط المعاصرة والكلاسيكية، وتتأثر بكل من الموضات الحالية والتوجهات المستقبلية.
Autumn Sweatt says:
find Herpafend reviews online, Charla, I’ve been using Herpafend for a few months currently, and I can truly say it has actually made a considerable distinction in my life. I’ve battled with repeating episodes for many years, and absolutely nothing appeared to function continually. Since I started taking Herpafend, I’ve noticed fewer break outs, and when they do occur, they’re much less extreme. The all-natural ingredients provide me assurance, and I enjoy that it’s very easy to include into my daily routine. Highly suggest it to anyone searching for a trusted way to handle break outs and boost their self-confidence!
Shay Pawlowski says:
We have a BetMGM promo code, Caesars Sportsbook promo code, FanDuel promo code, and DraftKings promo code, amongst others, along with presents from all high betting apps.
https://agarz.cc/ says:
durum ne olursa olsun, çok fazla/aslan payı/toplu https://agarz.cc/ sunucular Türklerden oluşur/oluşur/oluşturulur.
https://bozemanmagazine.com/news/2021/11/18/112493-5-reasons-why-you-need-an-automated-table says:
There are times when I hardly get https://bozemanmagazine.com/news/2021/11/18/112493-5-reasons-why-you-need-an-automated-table. I start my day standing for one hour or two at once, and at the end switch to sitting during a meeting.
https://agrics.org/ says:
agario is also intense it is developing on mobile platforms, so https://agrics.org/, which as reasonable its maximally portable option for gamers on transport.
https://fateknoloji.com/ says:
If you appreciate the competitive and dynamic game of agar io, that, there are many other games in https://fateknoloji.com/.in the world is io- slot machines , those that offer the same adorable impressions.
https://goldentiger-canada.com/ontario/ says:
in turn, https://goldentiger-canada.com/ontario/ pinup undertakes to monitor the quality of offered services and ensure highest state of security.
https://mydnepr.pp.ua/forum/topic.php?forum=11&topic=5629 says:
Прекрасная оптимизация каждого элемента ноутбука, дополненная выносливой батареей, является неиссякаемым источником энергии,.
Also visit my web blog … https://mydnepr.pp.ua/forum/topic.php?forum=11&topic=5629
Francis Moye says:
Helping ideal metabolic feature helps consumers expand healthy aging.
48104 says:
Yes, a tijdelijke telefoonnummer is all of it I can get when a virtual summer phone is issued for free.
my webpage: http://users.atw.hu/nlw/viewtopic.php?p=48104
http://juegos.es/industria/valve-lanza-pipeline-una-fuerte-apuesta-por-la-cantera-104617 says:
Регуляторы предъявляют серьезные запросы к претендентам http://juegos.es/industria/valve-lanza-pipeline-una-fuerte-apuesta-por-la-cantera-104617 на оформление разрешения.
www.pinup-az.website.yandexcloud.net says:
to remain our regular customers entertained and show our apprection, https://https://pinup-az.website.yandexcloud.net// we constantly offer promotions that users are able benefit from.
купить бонг says:
то, что toro glass сохраняет вершине на протяжении многих семестров, означает, https://idps.in.ua/2024/12/19/kak-pravilno-ispolzovat-bong-dlya-kureniya/ что сериалы делают что-то правильно.
https://medvin.ucoz.ua/forum/2-3408-1 says:
most effective along the entire length for office and commercial lighting from the top line can act up to 50 percent 000 https://medvin.ucoz.ua/forum/2-3408-1 per hour.
https://wallstreet-pepe.io/ says:
due to its essence, a https://wallstreet-pepe.io/, how much whatever Bitcoin wallet visitor use to package your crypto keys, must be simple to use.
https://slothana-coin.com/ says:
Security features. Safety becomes main principle that should consider when choosing a https://slothana-coin.com/ cryptocurrencies.
boba-oppa.io says:
Conflicts of interest: Many operators of platforms for trading with virtual currencies themselves invest significant funds in computer currencies, https://https://boba-oppa.io//, and trading on our own platforms without supervision.
https://firm86.com/2024/09/12/how-to-speed-up-your-e2e-tests-with-playwright/ says:
Now that you have https://firm86.com/2024/09/12/how-to-speed-up-your-e2e-tests-with-playwright/, you can to start testing. don’t be embarrassed contact to us, consultants of our corporation with pleasure will answer anyone of above.
https://bestwallettoken.org/ says:
this means that client will need to send bitcoin to address of a bitcoin wallet, an ethereum https://bestwallettoken.org/ link ethereum wallet and sixth.
https://p-network.io/ says:
Rewards: if you want receive passive from cryptocurrencies, the nexo https://p-network.io/ exchange allows investors to maximize profit from investments with the help of a large number products making money.
http://sportandpolitics.ukrbb.net/viewtopic.php?f=24&t=19057 says:
Как мне найти рестораны поблизости, http://sportandpolitics.ukrbb.net/viewtopic.php?f=24&t=19057 предлагающие доставку?
https://magameme.io/ says:
these skills they can demonstrate the power of the blockchain cryptocurrency and the dynamics of its exchange rate in all kinds of https://magameme.io/ markets.
https://slothana-coin.io/ says:
computer websites of future generation https://slothana-coin.io/.
вход в gmail почту says:
1. this is not the most and complex ; open personal browser, https://chromewebstore.google.com/detail/%D0%B2%D1%85%D0%BE%D0%B4-%D0%B2-gmail-%D0%BF%D0%BE%D1%87%D1%82%D1%83-gmail/bekjlhfdjnggolmglphobmeigmcajnfe?authuser=0&hl=ru in to network, then navigate to tab open account.
huobi-wallet.io says:
Which https://https://huobi-wallet.io// are the largest in the world? We guarantee that everything we publish is objective, accurate, and noteworthy.
zamba-colombia.com/mobile/ says:
zamba entre otras cosas le ofrece un bono de juguete en https://zamba-casino.com/mobile/ que puede representar 50 %/por ciento de su depósito inicial en caso de que lo deposite a través de código promocional zamba.
https://wellfound.com/company/mantrabio says:
independent because, whether you needs a floor covering in the garage or its sanding, https://wellfound.com/company/mantrabio, we provide positive fruits.
waffle-swap.io says:
Certain content was produced by third persons not affiliated with coinbase Inc.
Also visit my web site – https://waffle-swap.io/
armorywallet.io says:
8. click key “redo in album of the network selection, to explore a list of other blockchains compatible with the pyusd https://https://armorywallet.io// wallet.
https://gamestop-wallet.io/ says:
in addition to the favorable regulatory environment, https://gamestop-wallet.io/ hive emphasized that bitcoin in America allows people to send money directly to each other without involvement of the bank, using a secure blockchain technology named.
steroids.finance says:
paying close attention to such moments as ease of use, reliability and budgetary educational resources, beginners players who https://https://steroids.finance// can find platforms that meet their needs.
rox casino зеркало на сегодня says:
Пополнение счета в https://xn--61-8kc3bfr2e.xn--p1ai/ Casino занимает всего пару минут.
eidoo-wallet.io says:
Bitcoin (btc) is a https://https://eidoo-wallet.io// (virtual currency) intended for {kindling|use as {banknotes|money|bills|coins|banknotes} and a form of payment beyond the control of any one person, group, or {organization|institution}.
https://bitcoin-recovery.io/ says:
What can I do to resolve this?
My blog post – https://bitcoin-recovery.io/
eidoo-app.com says:
Privacy: Cryptocurrencies are a confidential currency. Why were cryptocurrencies created? In 2009, the https://https://eidoo-app.com// in the role of the first recognized cryptocurrency was launched.
https://sundogmeme.io/ says:
if client aspires apply another card, he|she must change the default settings of the https://sundogmeme.io/ wallet to a new card.
litevaultwallet.io says:
you besides you can to purchase his, like a hardware device and send directly to the recipient’s https://https://litevaultwallet.io// wallet.
comment-372007 says:
Министерство планировало завершить работы по созданию ВИМИС по инфекционным заболеваниям в 2022 году, но оперативка не введена в работу.
Feel free to visit my blog post http://spacocooning.com/2014/03/10/the-future-is-laundry-free/?unapproved=372007&moderation-hash=006487412635e33e379e8b93e5f650b9
https://msignawallet.com/ says:
interest rates are significant meet different based on platforms and https://msignawallet.com/ exchanges, therefore it is important to conduct research before acquiring an exchange labor.
обмен юсдт на монобанк says:
Обмен производится в режиме настоящего времени по установленному курсу.
my blog https://www.5692.com.ua/list/479418
Felicitas says:
Instead, focus on a specific problem, https://www.stoneaston.co.uk/, for clarity, how to fight ed together. choose the products listed above and reduce your consumption of red meat and dairy products.
clomid brand says:
if you need in best clomid brand in india online, make sure that on the website,
here you make a purchase , required availability of a prescription.
Fidel says:
Would you like to immediately start to Fidel from
our list? however if you are interested in some specific type of lubricant,
we also compiled a catalog of best anal lubricants and lubricants
with best flavors.
https://galiambiental.aproema.com/guia-ciudadana-para-el-correcto-reciclaje-de-los-raee/ says:
in most cases the masters experience intricacies with searching really hot https://galiambiental.aproema.com/guia-ciudadana-para-el-correcto-reciclaje-de-los-raee/, where it
is possible to jerk off.
https://ulcertify.com/product/davinci-light-11-5w-light-bulbs-premium-3-pack/ says:
Do you like hot moms, sexy teens or a lot in between, here present https://ulcertify.com/product/davinci-light-11-5w-light-bulbs-premium-3-pack/, what us will be turned on.
situs judi slot online says:
https://ginienterprise.com/ tidak peduli apa dianggap sebagai permainan menarik, kapan Anda memilih permainan di halaman situs gacor, dan mudah Anda akan memenangkan yang cocok, misalnya hawai303.
http://www.altasugar.it/new/index.php?option=com_kunena&view=topic&catid=3&id=135198&Itemid=151 says:
если вы решили купить надежные и действенные стероидные анаболики против гепатита, классное решение – Софосбувир и Велпатасвир.
my web-site :: http://www.altasugar.it/new/index.php?option=com_kunena&view=topic&catid=3&id=135198&Itemid=151
kekius-maximus.vip says:
Find leading traders and apply them forex strategies with https://https://kekius-maximus.vip// one tap. Binance app available only for users outside the USA
kekiusmaximuscoin.io says:
Each cryptocurrency has a unique token structure https://https://kekiusmaximuscoin.io//that will play an important situation in setting its market price. coinbase provides basic data about tokens for huge number of popular cryptocurrencies.
рокс казино регистрация says:
– Открыл для себя онлайн-слоты — теперь не оторваться!
рокс казино регистрация
Natalie Topp says:
hi!,I love your writing so so much! proportion we communicate more approximately your post on AOL? I require an expert on this house to resolve my problem. May be that’s you! Looking ahead to look you.
https://salda.ws/article/index.php?act=read&article_id=25875 says:
4. la fabbrica. молодая компания, однако, https://salda.ws/article/index.php?act=read&article_id=25875 сумевшая составить достойную конкуренцию гигантам промышленности.
spor bahisleri says:
entelektüel kart oyunu yasaları değişir ve değişebilir değişebilir {yargı yetkisine bağlı olarak|buna bağlı olarak|buna bağlı olarak https://euro-2024.com.tr/gamdom-incelemesi/.
https://homedecors.in/get-rid-of-betwinners-casino-games-for-good says:
6. View other games: bottom of the window of gaming establishment you will be able to find chance explore various categories, such as latest, popular, new, Betwinner https://homedecors.in/get-rid-of-betwinners-casino-games-for-good and classics.
mostbet gyakori kérdések says:
Mostbet, zengin oyun oynama yöntemlerinin |seçeneklerinin seçiminde farklılık gösterir, https://mostbet-turk112.com/ mostbet’te ve kumar oyunlar curosao için mevcudiyet izin ile.
kekius-maximus.org says:
Theoretically, https://https://kekius-maximus.org// should be downloaded are decentralized, and their wealth is distributed among many parties on the blockchain.
https://tourdewine.fr/emmanuel-rouget-echezeaux-grand-cru-2000/ says:
check out the variety of wines small size, to to see what you are interested in for a long time, without tedious to https://tourdewine.fr/emmanuel-rouget-echezeaux-grand-cru-2000/.
doxycycline 100mg capsules price says:
Our slogan is “no one does something, what will do!” – this is https://olivebranchstreetfood.co.uk/, simple and understandable!
https://www.openstreetmap.org/user/VandalVape says:
Кампании по борьбе с курением идут по всему миру, https://www.openstreetmap.org/user/VandalVape всё же спрос на табачные изделия стабильно высокий.
http://hackerhubb.blogspot.com/?p=358909 says:
The absence of the Betwinner app on the play market is explained by differences in Google’s policy
in situation of the Betwinner http://hackerhubb.blogspot.com/?p=358909.
https://health.vidaglobaltrade.com/timetested-ways-to-betwinner-sports-bets/ says:
in the current situation, as more states began to legalize https://health.vidaglobaltrade.com/timetested-ways-to-betwinner-sports-bets/, the strict ban on any championship matches held in America was lifted, where betting on games are legalized.
виртуальный номер для ватсап says:
также что реальная сим-карта дороже, чем разовый виртуальный номер телефона для sms, https://mykorus.ru/news/virtualnye-nomera-kak-oni-menyayut-nashe-vospriyatie-svyazi.html а ее покупка часто.
Tommie Bisdee says:
I was just searching for this info for a while. After 6 hours of continuous Googleing, at last I got it in your web site. I wonder what’s the lack of Google strategy that don’t rank this type of informative websites in top of the list. Generally the top websites are full of garbage.
doxycycline 50 mg india says:
The DEA is issuing this warning to guarantee public safety, to warn of an increase in the number of illegal online portals on which https://avaproject.org.uk/, often on foreign sites that were deceptively intended for American consumers.
https://www.pinupz.website.yandexcloud.net/ says:
These https://pinupz.website.yandexcloud.net/ provide a wider range of gambling options, including exclusive games and progressive jackpots.
https://metanetwork.gg/ says:
for a long time appointment , a https://metanetwork.gg/.
https://copaywallet.io/ says:
in this situation, the credentials of the https://copaywallet.io/ wallet for access to funds are stored at supplier of the online wallet, but not on the user’s.
https://trojansolana.app/ says:
However, the low liquidity of https://trojansolana.app/ exchanges may leading to significant price fluctuations.
http://nihonscube.jp/ikebesamatei/kake1/ says:
Từ “piquant” ban đầu chỉ là một thuật ngữ tiếng lóng
cho người dùng/ người {hoặc|hoặc|{bất cứ điều gì}
chứa đầy cuộc sống của http://nihonscube.jp/ikebesamatei/kake1/ hoặc năng lượng.
Декоративная штукатурка says:
Лермантов В. В.,. Штукатурная работа // Энциклопедический словарь Брокгауза и Ефрона : в 86 т. (82 т. https://fishkaremonta.by/catalog/shtukaturka_dekorativnaya/ и 4 доп.).
p87 says:
❹ не придется подыскивать поставщиков, https://duma.mybb.od.ua/viewtopic.php?id=41#https://duma.mybb.od.ua/viewtopic.php?id=41 закупка без скачивания с предприятия.
https://www.thestyleplus.co/how-to-achieve-the-perfect-hair-extensions-color-match-tips-and-tricks/ says:
available huge selection of lengths, colors, styles of https://www.thestyleplus.co/how-to-achieve-the-perfect-hair-extensions-color-match-tips-and-tricks/.
https://www.06452.com.ua/list/470065 says:
как выглядят https://www.06452.com.ua/list/470065 вторичное бесплодие? 30% постоянных пар испытывают трудности с зачатием ребенка.
https://tradeonlinemarket.com/the-evolution-of-online-shopping-a-seamless-retail-experience/ says:
An archive item is it is not just an item of clothing at least the year, the https://tradeonlinemarket.com/the-evolution-of-online-shopping-a-seamless-retail-experience/ season and collection, to which it belongs are important.
https://techsboy.com/how-do-you-trade-on-wundertrading/ says:
also, the https://techsboy.com/how-do-you-trade-on-wundertrading/ coinrule offers educational content for beginners and sends weekly emails to users with updates of the market.
sugar rush casino says:
because of that pragmatic play made this slot machine very dynamic, https://sugar-rush-demo.net/ wonderful suitable for gamers with a bankroll that will be enough for long sessions.
Edith Trethowan says:
адвокат и его функции
odnazhdy-v-skazketv.ru says:
в первом сезоне Злая Королева прерывает свадьбу Белоснежки и прекрасного Принца, чтобы объявить касательно того, что она наложит.
my web page: https://odnazhdy-v-skazketv.ru/
https://www.dmxzone.com/support/13984/topic/147945/ says:
specified details of our history, https://www.dmxzone.com/support/13984/topic/147945/ is our DNA as company and how a long-term producer of vodka.
nine poland says:
now we can move to the {most|most anticipated category of {any|all}, {regardless|regardless} of {online|virtual} {casino|gambling house|gaming establishment}, https://casinonine.pl/, useful {bonuses|bonuses} and the {promo|advertising} {promotions|campaigns}.
Bonnie says:
Of those customers, 52 percent claimed they took a specialized supplement, like omega-3s, probiotics, or fiber.
My web site :: http://dchain-d.com:3000/tonicorey3920/order-herpafend-online2016/wiki/Herbal+Capsules+Relief+for+Herpes+Outbreaks
https://www.dailyfashionhints.com/how-to-create-perfume-in-the-uae/ says:
The atmosphere of comfort and masculinity reigns here, which at the same time invigorates, and https://www.dailyfashionhints.com/how-to-create-perfume-in-the-uae/ soothe.
https://healthexpertstips.com/exploring-the-bra-etalon-a-blend-of-comfort-style-and-innovation/ says:
Scientific evidence for the effectiveness of posture correctors is limited and perhaps even biased, as some manufacturers of posture https://healthexpertstips.com/exploring-the-bra-etalon-a-blend-of-comfort-style-and-innovation/ fund research.
https://elektrem.com/the-ultimate-guide-to-online-casino-slotssafari/ says:
As such, in https://elektrem.com/the-ultimate-guide-to-online-casino-slotssafari/ here, there is no
was applications for revision, since momentary approach to
game via mobile browsers is effective on all devices.
https://webnus.net/why-mobile-apps-are-dominating-the-money-transfer-industry/ says:
it is possible to use a registered email system for specific business correspondence (for example, proposals, agreements, termination of contracts, requests for purchase, notifications, invoices, overdue payments, cancellation notifications).
Also visit my blog post; https://webnus.net/why-mobile-apps-are-dominating-the-money-transfer-industry/
Lorenza Farley says:
Great ? I should certainly pronounce, impressed with your site. I had no trouble navigating through all the tabs and related information ended up being truly easy to do to access. I recently found what I hoped for before you know it at all. Quite unusual. Is likely to appreciate it for those who add forums or anything, site theme . a tones way for your customer to communicate. Nice task.
https://medium.com/@michael-brown-/top-7-onshore-testing-companies-in-2025-f7f38a5edf09 says:
The seven principles of testing software, including more complete information on clustering defects, the Pareto principle of the https://medium.com/@michael-brown-/top-7-onshore-testing-companies-in-2025-f7f38a5edf09, and the pesticide paradox.
"https://drapia.org/11-WIKI/index.php/User:JudyF010269106" says:
Очень помогло, особенно советы по обработке поверхностей.
https://2021.asiateleophth.org/community/profile/melaniehogle260/
"https://futurelaw.io/policywiki/index.php/Dezflat.ru_23P" says:
Полезный материал, особенно актуально в сезон простуд.
http://wiki.sebastianfisahn.de:80/index.php?title=Dezflat.ru_43e
https://xutos.pt/casino-bruce-pokies-uk-a-comprehensive-guide/ says:
for those who prefer the classics, online Bruce Pokies casino introduces
a whole ocean of table games, such as Roulette, Blackjack, Baccarat, Poker, https://xutos.pt/casino-bruce-pokies-uk-a-comprehensive-guide/, and so on.
Проститутки Тольятти says:
они хотят ежедневно делать шаги к Проститутки Тольятти новым сексуальным приключениям.
Claudia Clemes says:
I’m not sure why but this website is loading very slow for me. Is anyone else having this problem or is it a issue on my end? I’ll check back later on and see if the problem still exists.
Jermaine Armitage says:
I like the helpful information you provide in your articles. I’ll bookmark your blog and check again here frequently. I am quite certain I will learn lots of new stuff right here! Good luck for the next!
Индивидуалки Тольятти says:
Эти индивидуальные любовницы обладают различными чертами:
от возрастных показателей до Индивидуалки Тольятти внешности.
i-gaming affiliate marketing says:
This must be an action that betting platform considers appropriate, for example, completing the procedure registration, watching a video tutorial, replenishing personal account, joining https://telegra.ph/Affiliate-Marketing-in-i-Gaming-Strategies-and-Tools-01-26 or play in specific slot or a.
Работа для девушек Владимир says:
в топ самых внушительных и репутационно привлекательных специализаций для женщин на законных основаниях
входит должность менеджера.
Feel free to surf to my web page: Работа для девушек Владимир
nail salons costa mesa says:
Read more pay attention to the model presented “https://www.instagram.com/beautystudio_by_veronika: How passion can affect on your business”. check out the latest search results for expert advice on beauty salons, to take information.
playlive online casino says:
това е най-много често срещана тенденция в индустрията хазарт и той също ще се увеличава за следващите няколко https://tanvirnet.com/finest-alive-online-casino-websites-in-the-philippines/ година.
https://forum.i.ua/topic/22259 says:
одновременно с развитием новой линейки упадёт стоимость на 15 процентов процентов % процентов поколение, и в случае, когда человек не.
my page :: https://forum.i.ua/topic/22259
вакансии девушкам эскорт досуг Йошкар-Ола says:
можем предложить вам высокооплачиваемую работу без опыта и вакансии девушкам эскорт досуг Йошкар-Ола специального
образования!
888starz casino bonus says:
Ez a sokoldalú funkcionalitás dinamikus és vonzó ökoszisztémát hoz létre
as szerencsejátékosok, as számára 888starz casino bonus as a
kriptovaluta rajongók számára.
Jackpot Rider casino UK says:
to use your electronic card for payments on the
poker site, Jackpot Rider casino UK and hackers steadily are
looking for/are looking for options to steal personal and monetary information.
элитные проститутки нижнего новгорода says:
телочки у метро Заречная
нижнего новгорода на вызов в любое время хочет удовлетворить заказчиков в интимной элитные проститутки.
My web blog элитные проститутки нижнего новгорода
888starz casino says:
Machines à sous big 7 et similaires. Sélectionnez votre option préféré paiement, 888starz casino
faites un montant supérieur minimum souhaits
et confirmez la transaction.
ссылка на mega says:
https://xn--meg-sb20-px0d.com
Tanks
эротический массаж Тольятти says:
вы в любой момент обогатите свой секс опыт, https://girls-tolyatti.com/category/eroticheskiy_massazh который сможете подарить спустя время.
https://ogoua.com/board/blokbeton-13109.html says:
в итоге получится «чистое» количество блоков.
также, как в жилых помещениях из газо- и пеноблоков.
my site … https://ogoua.com/board/blokbeton-13109.html
bcgame bonus says:
bcgame bonus、視覚的な効果と思い出に残る効果音は、によると様々なテーマ、のみ強化ゲームに浸漬の{感/感}。.
https://mestam.info/ru/anapa/mesto/6753500-ip-nurdjanyan-ekaterina-mihailovna-tehnicheskii-proezd-6 says:
За марку принимается очень много циклов попеременного замораживания до двадцати °c и оттаивания при темпрературе воздуха 12-20 °c,.
Visit my website https://mestam.info/ru/anapa/mesto/6753500-ip-nurdjanyan-ekaterina-mihailovna-tehnicheskii-proezd-6
аркада казино вход says:
оформление портала аркада топовое казино существует в комфортном минималистичном стиле, аркада казино вход что предоставляет удобную.
https://www.footballgroundmap.com/articles/top-strategies-for-successful-football-betting-in-pakistan says:
Game https://www.footballgroundmap.com/articles/top-strategies-for-successful-football-betting-in-pakistan give clients have the opportunity to observe such scenarios, and also time to determine a possible profitable bid.
lemon casino online says:
az idő, melyik meglepődik, hogy kitalálja, mi Las Vegasban vannak több https://lemon-casino-hungary-bonus.com/.
1xslots casino says:
as always, https://1x-slots-argentina-bonus.com/ players should treat gambling absolutely and be quality of processing legality of remote gambling in his jurisdiction.
https://www.mapleprimes.com/users/Witalis says:
you also need to focus on the types of slots, which you want, and don’t waste time on machines on them, as you know,
you definitely you don’t want to to spend good salary in a https://www.mapleprimes.com/users/Witalis.
https://www.royalpianos.com/wp-content/pgs/?popular-new-slots-compared-megaways-vs-classic-slots.html says:
in addition to this, other portals for https://www.royalpianos.com/wp-content/pgs/?popular-new-slots-compared-megaways-vs-classic-slots.html may charge a low commission for withdrawing finances. Cryptocurrency is can give a new adopt things.
1win korea bonus says:
welcome to 1win, 1win https://1wins-korean-bonus.com/, the leading online entertainment and betting platform created exclusively for users in India.
https://davisa.es/page/how-random-number-generators-work-in-slots.html says:
in such comprehensive guide https://davisa.es/page/how-random-number-generators-work-in-slots.html the authors of the materials will tell you about everything , what you is not bad to know about casinos that accept cryptocurrency.
Slotlar says:
Eğlenceli oyun/oyun dünyası ve ilginç ödüller sizi bekliyor/bekliyor düzenli ziyaretçiler
Slotlar.
1win romania bonus says:
moreover/moreover, it is licensed and offers reliable maintenance on the site. online slot machines represent one of the most large categories various games at 1win https://1win-romania-bonus.com/.
1win uae bonus says:
Players gamble before a round, and rng determines maximum possible odds, only after all this https://1win-uae-bonus.com/ the 1win game begins.
www.casino-basaribet.com says:
successibet, müşteri memnuniyetini güçlendirmeyi amaçlayan şikayetleri ciddiye alır https://casino-basaribet.com/ successibet ve size en iyi hizmeti sağlamak|sağlamak için her şeyi yapar.
https://www.wantedly.com/id/ivan_orlov says:
useful find out what the RTP of the slot is, because in addition to indicating game quality, a https://www.wantedly.com/id/ivan_orlov and multipliers.
Alissa Castle says:
I truly value your work, Great post. netflix nowości 2022
ciekawe seriale netflix
film królowa
disney channel seriale
film skazana
dobre seriale netflix
hbo seriale 2022
fajny serial netflix
vod seriale
fajny serial netflix
hbo filmy 2022
diego epoka lodowcowa
filmy i seriale online za darmo bez rejestracji
seriale netflix
fajne seriale
fajne seriale na netflix
premiery netflix
hbo max premiery
netflix najnowsze filmy
nowe seriale netflix
netflix najnowsze filmy
dobre seriale netflix
kevin sam w nowym jorku kiedy w tv
vod seriale
hbo max premiery
nowe seriale netflix
antoni królikowski filmy
nowy film na netflix
filmy i seriale online za darmo
premiery netflix
canał plus seriale program
netflix seriale 2022
filmy i seriale online za darmo bez rejestracji
filmy tureckie z lektorem
filmy i seriale online za darmo bez rejestracji
antoni królikowski filmy
hbo max premiery
netflix nowości 2022
filmy i seriale online za darmo
filmy i seriale
netflix seriale 2022
filmy i seriale
filmy tureckie z lektorem
nowy film na netflix
czarne lustro film
nowe filmy netflix
diego epoka lodowcowa
emilian kamiński filmy
netflix najnowsze filmy
emilian kamiński filmy
seriale netflix
hbo seriale 2022
antoni królikowski filmy
kevin sam w nowym jorku kiedy w tv
seriale hbo max
kevin sam w nowym jorku kiedy w tv
kryptonim polska film
fajne seriale
nowe filmy na netflix
disney channel filmy
emilian kamiński filmy
nowy film na netflix
dobre seriale netflix
czarne lustro film
polskie seriale hbo
fajne seriale na netflix
nowe seriale netflix
ciekawe seriale netflix
darmowe seriale
film królowa
filmy na netflix
dobre seriale
filmy i seriale online za darmo bez rejestracji
nowe seriale
netflix premiery
seriale
disney channel filmy
fajny serial netflix
filmy na netflix
film skazana
hbo max filmy 2022
premiery netflix
kevin sam w nowym jorku kiedy w tv
fajne seriale na netflix
darmowe seriale
netflix premiery
hbo seriale 2022
emilian kamiński filmy
nowe filmy netflix
fajne seriale
nowe filmy netflix
darmowe seriale
disney channel filmy
netflix seriale 2022
nowe filmy netflix
kryptonim polska film
disney channel filmy
filmy na netflix
netflix najnowsze filmy
diego epoka lodowcowa
netflix seriale 2022
filmy i seriale online za darmo
seriale online za darmo
filmy i seriale
netflix nowości 2022
netflix seriale 2022
antoni królikowski filmy
hbo seriale 2022
czarne lustro film
seriale netflix 2022
hbo max premiery
netflix premiery
emilian kamiński filmy
fajne seriale
filmy i seriale online za darmo
hbo go seriale
hbo go seriale
darmowe seriale
seriale netflix
hbo max premiery
filmy i seriale online za darmo
filmy tv
filmy na netflix
nowe filmy netflix
seriale online za darmo
fajny serial netflix
emilian kamiński filmy
polskie seriale hbo
seriale
nowe filmy netflix
seriale hbo max
fajny serial netflix
filmy i seriale
disney channel filmy
nowe seriale
kryptonim polska film
film królowa
nowe seriale
nowy film na netflix
netflix najnowsze filmy
film królowa
netflix seriale 2022
fajny serial netflix
antoni królikowski filmy
nowe filmy na netflix
disney channel seriale
filmy i seriale
polskie seriale hbo
seriale tv online za darmo
seriale online za darmo
kryptonim polska film
filmy i seriale online za darmo bez rejestracji
do zobaczenia film
seriale
disney channel seriale
netflix seriale 2022
seriale online za darmo
filmy
filmy i seriale
netflix najnowsze filmy
seriale tv online za darmo
kevin sam w nowym jorku kiedy w tv
nowy film na netflix
dobre seriale
premiery netflix
netflix najnowsze filmy
kevin sam w nowym jorku kiedy w tv
netflix premiery
antoni królikowski filmy
fajny serial netflix
disney channel filmy
seriale online za darmo
filmy
dobre seriale
seriale online za darmo
canał plus seriale program
filmy i seriale
film królowa
filmy na netflix
film królowa
filmy i seriale online za darmo
fajne seriale
dobre seriale
fajny serial netflix
polskie seriale hbo
hbo seriale 2022
fajny serial netflix
nowe seriale
hbo max premiery
fajny serial netflix
ciekawe seriale netflix
hbo max premiery
hbo max filmy 2022
seriale
netflix seriale 2022
filmy
emilian kamiński filmy
fajny serial netflix
fajny serial netflix
nowy film na netflix
kevin sam w nowym jorku kiedy w tv
ciekawe seriale netflix
netflix nowe filmy
disney channel filmy
seriale netflix
kevin sam w nowym jorku kiedy w tv
ciekawe seriale netflix
hbo max premiery
hbo go seriale
fajne seriale na netflix
nowe seriale netflix
nowe seriale netflix
dobre seriale netflix
seriale netflix 2022
seriale tv online za darmo
netflix najnowsze filmy
film skazana
netflix premiery
disney channel filmy
filmy i seriale online za darmo
seriale hbo max
kryptonim polska film
netflix nowości 2022
emilian kamiński filmy
netflix seriale 2022
filmy
czarne lustro film
netflix nowe filmy
seriale netflix 2022
seriale
seriale
netflix nowości 2022
polskie seriale hbo
nowe seriale netflix
filmy tureckie z lektorem
kryptonim polska film
emilian kamiński filmy
seriale netflix 2022
vod seriale
seriale tv online za darmo
filmy i seriale online za darmo
nowy film na netflix
kevin sam w nowym jorku kiedy w tv
hbo max premiery
nowe filmy na netflix
fajne seriale na netflix
filmy i seriale online za darmo bez rejestracji
premiery netflix
diego epoka lodowcowa
disney channel filmy
filmy i seriale online za darmo bez rejestracji
kryptonim polska film
seriale netflix 2022
netflix nowe filmy
seriale online za darmo
seriale tv online za darmo
filmy i seriale
darmowe seriale
filmy
film królowa
canał plus seriale program
polskie seriale hbo
seriale hbo max
netflix najnowsze filmy
filmy i seriale online za darmo bez rejestracji
kevin sam w nowym jorku kiedy w tv
hbo go seriale
kevin sam w nowym jorku kiedy w tv
fajny serial netflix
kevin sam w nowym jorku kiedy w tv
netflix nowości 2022
fajne seriale na netflix
fajne seriale na netflix
fajne seriale na netflix
seriale tv online za darmo
seriale hbo max
nowe seriale netflix
ciekawe seriale netflix
fajne seriale
seriale netflix 2022
seriale tv online za darmo
czarne lustro film
filmy na netflix
premiery netflix
disney channel filmy
emilian kamiński filmy
hbo filmy 2022
seriale netflix 2022
disney channel seriale
filmy
filmy na netflix
netflix seriale 2022
fajny serial netflix
nowe filmy netflix
hbo seriale 2022
disney channel filmy
seriale
fajne seriale
hbo max premiery
canał plus seriale program
ciekawe seriale netflix
dobre seriale netflix
disney channel filmy
filmy i seriale online za darmo
fajne seriale na netflix
seriale netflix
hbo go seriale
hbo seriale 2022
do zobaczenia film
diego epoka lodowcowa
film skazana
filmy i seriale online za darmo
disney channel filmy
netflix najnowsze filmy
canał plus seriale program
fajny serial netflix
kryptonim polska film
hbo max premiery
nowe seriale
nowy film na netflix
nowy film na netflix
darmowe seriale
filmy tv
hbo filmy 2022
fajne seriale na netflix
darmowe seriale
disney channel filmy
filmy tv
do zobaczenia film
nowe seriale netflix
filmy na netflix
nowy film na netflix
hbo filmy 2022
filmy tureckie z lektorem
filmy tureckie z lektorem
film skazana
hbo go seriale
antoni królikowski filmy
antoni królikowski filmy
kevin sam w nowym jorku kiedy w tv
hbo max premiery
seriale online za darmo
nowe seriale netflix
fajne seriale na netflix
nowe filmy netflix
antoni królikowski filmy
hbo max premiery
seriale online za darmo
antoni królikowski filmy
disney channel seriale
netflix seriale 2022
ciekawe seriale netflix
filmy na netflix
netflix seriale 2022
premiery netflix
filmy tureckie z lektorem
seriale tv online za darmo
darmowe seriale
seriale
fajne seriale
kryptonim polska film
filmy i seriale online za darmo
do zobaczenia film
hbo max filmy 2022
seriale netflix 2022
netflix nowości 2022
netflix seriale 2022
antoni królikowski filmy
fajne seriale
filmy i seriale online za darmo
vod seriale
netflix seriale 2022
seriale netflix
seriale online za darmo
seriale netflix 2022
polskie seriale hbo
emilian kamiński filmy
polskie seriale hbo
seriale hbo max
nowe filmy na netflix
netflix nowości 2022
nowe seriale
filmy na netflix
filmy i seriale
seriale hbo max
nowy film na netflix
disney channel filmy
kevin sam w nowym jorku kiedy w tv
filmy
filmy
seriale tv online za darmo
nowe filmy na netflix
canał plus seriale program
kevin sam w nowym jorku kiedy w tv
seriale hbo max
ciekawe seriale netflix
polskie seriale hbo
fajny serial netflix
filmy na netflix
seriale online za darmo
hbo go seriale
hbo filmy 2022
netflix najnowsze filmy
seriale netflix 2022
polskie seriale hbo
hbo seriale 2022
film królowa
nowe filmy na netflix
disney channel seriale
nowy film na netflix
netflix nowości 2022
nowe seriale
nowy film na netflix
filmy i seriale online za darmo
film królowa
czarne lustro film
seriale netflix 2022
fajne seriale na netflix
seriale netflix
hbo go seriale
filmy i seriale
filmy tv
filmy i seriale online za darmo bez rejestracji
nowe seriale netflix
nowe filmy netflix
seriale netflix 2022
seriale netflix
darmowe seriale
disney channel filmy
darmowe seriale
filmy i seriale online za darmo
filmy
diego epoka lodowcowa
seriale online za darmo
filmy i seriale
nowe filmy na netflix
seriale online za darmo
ciekawe seriale netflix
nowe filmy na netflix
filmy i seriale online za darmo bez rejestracji
emilian kamiński filmy
fajne seriale na netflix
darmowe seriale
filmy
seriale netflix
seriale hbo max
nowe seriale
fajne seriale na netflix
seriale tv online za darmo
fajne seriale
seriale
seriale hbo max
antoni królikowski filmy
netflix seriale 2022
antoni królikowski filmy
kryptonim polska film
hbo max premiery
seriale netflix 2022
filmy tureckie z lektorem
kevin sam w nowym jorku kiedy w tv
do zobaczenia film
filmy i seriale
seriale hbo max
seriale netflix
filmy tureckie z lektorem
hbo seriale 2022
hbo max premiery
premiery netflix
kevin sam w nowym jorku kiedy w tv
disney channel seriale
ciekawe seriale netflix
polskie seriale hbo
filmy tureckie z lektorem
filmy tureckie z lektorem
netflix seriale 2022
ciekawe seriale netflix
kevin sam w nowym jorku kiedy w tv
dobre seriale netflix
nowe filmy netflix
dobre seriale netflix
vod seriale
vod seriale
filmy i seriale
filmy tv
nowe seriale
nowe filmy netflix
hbo go seriale
do zobaczenia film
disney channel filmy
nowy film na netflix
fajny serial netflix
netflix nowości 2022
kryptonim polska film
nowe seriale
netflix nowości 2022
film skazana
сделать тату в москве недорого и качественно says:
Вежливость, стерильность и безвредность в приоритете, так что за время существования салона негативных отзывов не встречалось, сделать.
Feel free to visit my web-site сделать тату в москве недорого и качественно
t.me/s/luchshie_bukmekery says:
чем более высокими являются букмекер здесь, https://t.me/s/luchshie_bukmekery тем больше матчей она даёт и глубже
рассматривает каждую игру.
складчина says:
сейчас мы дружно учимся.
Also visit my blog: https://v1.skaldchik.org/
Aviator game review says:
should note that compared to many games for betting, the Aviator https://elijah1n38gbr2.blogs100.com/profile on a new level from the position expenses for refund amounts to the players.
https://busovod.ua/showthread.php?t=19312 says:
Also visit my web page: https://busovod.ua/showthread.php?t=19312
"https://tehnik-shop.ru/the_articles/postavschik-proksi.html" says:
Прокси не падают, всё стабильно и без нареканий!
https://unsplash.com/@sherylwatts2
"https://www.pearltrees.com/sherylwatts2" says:
Работают без банов, уже не первый месяц пользуюсь!
https://clever-market.ru/the_articles/provayder-proksi-serverov.html
https://www.kremaciya-ukraina.com/ru/kremaciya-v-zaporozhe says:
в данном случае ритуальные услуги включают заказ разнообразных атрибутов, проведение отпевания в церкви, перевозку гроба с телом в.
Feel free to visit my website :: https://www.kremaciya-ukraina.com/ru/kremaciya-v-zaporozhe
казино дрип says:
с другой стороны, казино дрип безопасность в сфере igaming приобретение не необходимость.
"http://www.smartphone.ua/news/tekhnologiya-proksirovaniya-trafika-preimushestva-i-nedostatki_77103.html" says:
Всегда стабильное соединение, доволен качеством!
https://saleous.ru/the_articles/udalennye-proksi-servery.html
drip казино says:
Условия кэшбека и вейджер зависят от статуса лояльности. Изначально азартные люди пользуются шансом изучить десято опций для игры.
Also visit my webpage :: http://munchkindb.ru/download
roastberry.pt says:
O nosso destino é Tissamaharama., https://https://roastberry.pt// de onde vamos para o safari no dia seguinte pela manhã. O chá foi introduzido no Sri Lanka pelos ingleses no século XIX.
https://www.fedpol.admin.ch/metas/de/home/fabe/elektromagnetische-vertraeglichkeit.html says:
aufgrund hohe Übertragungsraten Senden Daten, mobile Netzwerke|Internet|Suchmaschinen} und Technik/Technologie} https://www.fedpol.admin.ch/metas/de/home/fabe/elektromagnetische-vertraeglichkeit.html unaufhörlich/unaufhörlich sich entwickeln.
https://providerweb.ru/oktyabrsk says:
The specialized surveillance department manages the https://providerweb.ru/oktyabrsk's video surveillance system, known internationally as “eyes in heaven”.
https://www.mostbetcasino-bd.com/ says:
সম্ভবত দর্শক এটি প্রয়োজনীয় স্ট্যান্ড কিছু বিন্দু, আপনি জানতে হবে এই উত্তেজনাপূর্ণ.
Here is my web-site: https://mostbetcasino-bd.com/
Most bet 1 অফিসিয়াল মিরর বাংলাদেশ says:
আপনি আমাদের থেকে চয়ন করুন শুধুমাত্র বাংলাদেশে সর্বাধিক বিট.
My web-site: https://mostbet-bangladesh.bet/mostbet-1/
https://www.covidvconquerors.com/forum/covid-v-conqueror-s-community/tips-for-learning-overpass-in-cs2 says:
Proper design of the world wide web infrastructure is also extremely valuable for the normal interaction of unified https://www.covidvconquerors.com/forum/covid-v-conqueror-s-community/tips-for-learning-overpass-in-cs2.
https://www.tribehotyoga.guru/forum/advanced-yoga/tea-party-setup-suggestions says:
The banner is funny but unusual, if you look at it, https://www.tribehotyoga.guru/forum/advanced-yoga/tea-party-setup-suggestions, however all similar kawaii things are if you really notice.
https://chopen.net/arenda-virtualnogo-nomera-telefona-ot-hottelecom-novyj-uroven-kommunikaczii/ says:
Виртуальные номера – это комфортный вариант, для игроков, стремящихся оставаться конфиденциальным либо не имеют возможности купить.
my web blog https://chopen.net/arenda-virtualnogo-nomera-telefona-ot-hottelecom-novyj-uroven-kommunikaczii/
https://perles-phine.fr/b9-online-game-a-new-era-of-digital-gaming/ says:
b9 offers players many ways so that they could find fact that
fits for their https://perles-phine.fr/b9-online-game-a-new-era-of-digital-gaming/.
http://navitola.ru/ says:
Ми забезпечимо максимально оперативну с доставкой в будь-яке місто України.
Here is my website: http://navitola.ru/
kraskimagazin.ru says:
5.1. Акриловые водные лаки для стенок и потолков внутри брусового дома.
Feel free to visit my blog :: http://kraskimagazin.ru/
http://tech-detal96.ru/ says:
403 Forbidden Forbidden You don’t have permission to access this resource. Apache/2.4.41 (Ubuntu) Server at tech-detal96.
Check out my web blog: http://tech-detal96.ru/
novostroy-kemerovo.ru says:
2. какие есть http://http://novostroy-kemerovo.ru// неисправности? необходимое про них знать?
http://anthonyhead.com/forums/topic/windows-11-pro-vs-home/ says:
autocad lt is a cheaper version of autocad with advanced features, first released by http://anthonyhead.com/forums/topic/windows-11-pro-vs-home/ in November 1993.
Сиделки Москва says:
оформление на работу выполняется
в офисе патронажной службы «Патронаж-Сити», Сиделки Москва расположенном в центре г.
Москвы.
http://rukodelie-magazin.ru/ says:
Взаимосвязь поколений через творчество и наставничество принесет пользу и разным http://rukodelie-magazin.ru/ и прочим.
fastamarket.ru says:
Ниже приведены более эффективные инструменты, доступные в интернете, которые помогут выявить мошенников: Проверка домена или ссылки в.
Have a look at my web site; http://fastamarket.ru/
murmanregion.ru says:
Экскурсия на атомный ледокол “Ленин”; Река Титовка, водопад; Ловозёрские тундры. 27.11.
Feel free to surf to my web site … http://murmanregion.ru/
Alana Lattimore says:
Way cool! Some very valid points! I appreciate you penning this write-up and the rest of the website is really good.
http://mebel-doma123.ru/ says:
Для регулярных прогулок в любую погоду у многих из них существует множество курток, дождевиков, ботинок, сапог и немало иных.
Check out my page – http://mebel-doma123.ru/
buenoman.ru says:
sq – магазин модной женской одежды, который размещен в Бишкеке, Кыргызстан, предоставляет обширный выбор модных и качественных изделий,.
My blog post: http://buenoman.ru/
http://4725.ru/ says:
Выполнена оптимизация серверного ПО. http://4725.ru/ “Праздница” – сосредоточении данных о праздниках и методах их проведения.
https://www.madridactual.es/los-especialistas-preven-un-futuro-para-el-juego-en-linea-que-sera-mas-social-atractivo-y-precisamente-dirigido says:
Mega Ruleta Loca. Haga apuesta en real cantidades cantidad no menos|menos} – 0,20 Euro en casino legiano casino en Mega ruleta, Mega ruleta Brasileña y Mega ruleta Turca futuro
para el juego en línea y gana el premio.
My webpage; https://www.madridactual.es/los-especialistas-preven-un-futuro-para-el-juego-en-linea-que-sera-mas-social-atractivo-y-precisamente-dirigido
https://laverdadonline.com/las-5-sorpresas-imperdibles-de-los-casinos-online-nuevos/ says:
aparte de esto, los nuevos casinos online legiano se compromete a garantizar la seguridad de los datos personales y financieros de sus clientes utilizando herramientas de protección avanzadas.
Feel free to surf to my blog … https://laverdadonline.com/las-5-sorpresas-imperdibles-de-los-casinos-online-nuevos/
http://tehno-rem.ru/ says:
помимо прочего вы имеете возможность обнаружить решения на возникшие вопросы у операторов службы поддержки, которая работает.
my homepage: http://tehno-rem.ru/
septik-tech78.ru says:
Это неприятный амбре, http://http://septik-tech78.ru// необходимость откачки ассенизаторской службой.
medicalclothes24.ru says:
Канализацию половой, деловой, агрессивной энергий.
Here is my blog post – http://medicalclothes24.ru/
007market.ru says:
каждая предмет быта или искусства максимально надежна чтобы не обманет в любой ситуации.
Look at my website; http://007market.ru/
http://yastrebstore.ru/ says:
одновременно с этим блюда оригинальные: вы удивитесь, когда поймете, http://yastrebstore.ru/ что их с легкостью приготовит и ребенок.
http://alenkashop.ru/ says:
Качели, люльки, переносные манежи.
Also visit my web blog: http://alenkashop.ru/
http://ps-podarki.ru/ says:
Продолжаем нашу серию интервью со
направлением, http://ps-podarki.ru/ и сегодня мы рады приветствовать сидя в кресле в
гостях Скандинавию.
cibershop.ru says:
Длина у них доходит до 10 см. а к примеру иногда появляющиеся жёлтые цветки крохотные и http://http://cibershop.ru// некрасивые.
5ka-shop.ru says:
Сотрудники магазина ежедневно просматривают камеры видеонаблюдения, http://http://5ka-shop.ru// пишут заявки в полицию.
Damaris Dorn says:
continuously i used to read smaller articles or reviews which also clear their motive, and that is also happening with this piece of writing which I am reading now.
Caitlin Martell says:
I visited multiple web sites except the audio quality for audio songs present at this site is truly superb.
1win 제휴 says:
당신은 할 수 있습니다다양한게임:유럽,프랑스,미국 룰렛,온라인 룰렛현재및{기타./훨씬
더/다른 것}.
Feel free to surf to my webpage … 1win 제휴
www.pinup306.website.yandexcloud.net says:
Çoxsəviyyəli autentifikasiya – hesabların icazəsiz girişdən qorunmasını təmin etmək https://https://pinup306.website.yandexcloud.net// edir. sonra qəbul şərtlər tikinti tıqqıltı düyməsini “Davam”.
https://www.mostbet.website.yandexcloud.net says:
4. lazımlı sənədlər (şəxsiyyət vəsiqəsi, Xarici pasport, https://mostbet.website.yandexcloud.net// Sürücülük vəsiqəsi və s.) birinin şəklini çəkinya və yükləyin.
Lucky Jet gambling game says:
Enter the promo code (if required): to review some bonuses necessary – enter the code during
registration in the Lucky Jet gambling game or when adding funds
to the balance.
онлайн казино says:
Игроков различных уголков ждет многоязычный https://brandingalbuquerque.com/black-seo-links-purchased-links-software-for-4235/ интерфейс.
lucky jet online says:
this approach enables minimize possible risks and protect the bankroll, and in addition gives risk higher profit when repeated betting in the https://bookmarkfox.com/story4382485/lucky-jet-review-everything-you-need-to-know.
rehab-22 says:
Наркологическая клиника в Барнауле плюс в Луганске
(ЛНР) работает с пациентами,
вне зависимости от меры тяжести их состояния, и.
Visit my homepage rehab-22
Lucky Jet Download says:
don’t forget, which in the Lucky Jet Download it
depends entirely depends on the number of attempts and the distance.
make sure that any clarifications are met, and start the download process.
Jimmie Beauvais says:
Hey There. I found your weblog the use of msn. This is a really neatly written article. I will make sure to bookmark it and come back to read extra of your helpful info. Thanks for the post. I’ll certainly comeback.
https://TherapyforAutismStemCell.com/ says:
such process is similar to this, which happens, while citizens grow their
original teeth treated with https://TherapyforAutismStemCell.com/.
pocket trader says:
This feature creates a community of traders who cooperate with each other, https://gravatar.com/investtedivy promotes the exchange of knowledge, and offers opportunities to improve trading results.
https://vsn.ua/news/chomu-derzhavam-vigidnishe-regulyuvati-kriptopoziki-a-ne-zaboronyati-yih-57708 says:
Будинок Франка, Львів, https://vsn.ua/news/chomu-derzhavam-vigidnishe-regulyuvati-kriptopoziki-a-ne-zaboronyati-yih-57708 вул.
ProgressInAutismTreatment.com says:
My web blog: ProgressInAutismTreatment.com
https://autismtreatmentserbia.com/ says:
After collecting the material, https://autismtreatmentserbia.com/ is performed, which is added
into the damaged disk. one of the advantages of stem cell therapy undoubtedly is
that that she does not requests surgical intervention.
https://stemcellserbia.com/ says:
if you for now additional doubt, you always have the
opportunity to ask your doctor if he knows about any patients which insurance covered stem cell treatment.keep in mind https://stemcellserbia.com/.
https://stemcelltreatmentinusa.com/ says:
It has been found that the p3bv peptide, which is part of phospholipase a2, is particularly effective in fighting HIV, so https://stemcelltreatmentinusa.com/ of this particular virus helps to prevent cell fusion and inhibit viral replication.
888 starz download ios says:
money is not located in balance after you send a withdrawal request 888 starz download ios.
The offer of sporting events is also inspiring, and present abundance options of deposits
and withdrawals of amounts.
Чемпион Слотс says:
для этого нужно лишь активировать новостную рассылку интернет платформы, и оставить соответствующий Чемпион Слотс запрос менеджерам.
https://sexbule.xxx/tags/romanian says:
majority of people appeared those either other vices. how I already repeatedly I stated that https://sexbule.xxx/tags/romanian is the best way to master a foreign language – to start speaking it from initial day.
vavada бонусы https://www.cfin.ru/parser_news/pgs/?23promokod-vavada-2025_1.html says:
ни в каких обстоятельствах сведения, не предоставляются посторонним и поэтому не выкладываются vavada бонусы промокод вавада vavada.
Have a look at my web-site: https://tver-philharmonic.ru/filarmoniya/pgs/?vavada-bonusi-2025.html
как играть на бонусный счет vavada says:
Ведь игровой клуб это не только площадкой мир азарта и интернет-развлечений, но также образцом интеграции современных классических.
My web page :: https://transmiti.org/
https://asyamarketing.blog4youth.com/34006912/trends-and-best-practices-in-software-development-for-2025 says:
Or, if you intend found fresh section, https://asyamarketing.blog4youth.com/34006912/trends-and-best-practices-in-software-development-for-2025, absolutely everything that they need do this describe section in AI co-pilot and click, to accumulate it.
http://caprika.ru/ says:
«Лайфхакерша».
Feel free to visit my web blog – http://caprika.ru/
http://gurmanof.ru says:
очень популярным товаром данного производителя http://gurmanof.ru// является фольга.
http://mybagmarket.ru says:
Следовательно, http://mybagmarket.ru// риск кредитора снижается при выдаче ссуд нескольким заемщикам.
http://fav-stroy.ru/ says:
каждый сможет самостоятельно сделать заказ на территории избранное на платформе и заказать цветы от ближайшего магазина с подъемом до.
Feel free to surf to my site: http://fav-stroy.ru/
http://mebeldomspb.ru says:
заказывая обстановка для гостиной, имеете возможность ознакомиться со альтернативные варианты стенок (даже и статуэтки), современных.
My site :: http://mebeldomspb.ru/
http://www.krdshops.ru/ says:
Несколько ресторане и заведений общепита, http://www.krdshops.ru/ фастфуд и месту продажи сладостей – все это существуют в фудкорте “Меги”.
http://gardt-mebel.ru says:
наши посетители силах воспользоваться услугой самовывоза (забрать заказ можно с 10:00 до двадцати одного:00). Магазин находится на дом: г.
My site: http://gardt-mebel.ru/
https://goatgyan.com/vavada-casino-obzor-i-plyusy-populyarnogo-onlain-kazino/ says:
информация о бонусах, https://goatgyan.com/vavada-casino-obzor-i-plyusy-populyarnogo-onlain-kazino/ турнирах и других акциях будет на вашу интернет-адрес.
http://scmaster.ru/ says:
эти квадрокоптеры бесценны для контактирования, работы, http://scmaster.ru/ развлечений и ряда других задач.
http://motosale-ekb.ru/ says:
Изначально, хозяйка назвала нам стоимость, которая людей не устроила и наши сотрудники уже расстроившись, направились в сторону.
Also visit my webpage … http://motosale-ekb.ru/
http://gorodskoj.bestforums.org/viewtopic.php?f=3&t=864 says:
придя в салон rentmotors в городе, http://gorodskoj.bestforums.org/viewtopic.php?f=3&t=864 вам выдается множество плюсов.
Porn genres says:
some portals offer application for https://landenjuod56678.webbuzzfeed.com/33566066/what-defines-a-luxury-companion sites with porn videos. certainly, there are porn games both for iphone and with a purpose android!
http://posobnovshop.ru/ says:
Комплект полно объемных складных чучел Огаря 12 шт Комплект полно объемных складных чучел Огаря 12 штВ комплект входит:7 кормящихся 3.
Also visit my web page – http://posobnovshop.ru/
http://mamachki.ucoz.lv/forum/74-10917-1 says:
у него ускоренная работа за счет мгновенной отклика на действия обладателя.
Also visit my web site … http://mamachki.ucoz.lv/forum/74-10917-1
https://sites.google.com/view/fnfunblockedmod/tricky says:
do you want work a street star musical compositions and set the audience on fire? For beginners necessary kick off with the original version of the https://sites.google.com/view/fnfunblockedmod/tricky (fnf).
https://imarket-kirov.ru/ says:
Существует популярная классификация программного обеспечения по видам.
Feel free to surf to my site https://imarket-kirov.ru/
тур в Китай 2025 says:
Узнайте сверх того о культурном и историческом наследии Китая, https://tyri-v-kitay-2025.ru/ проведя 6 дней в Пекине. вы увидите жизнь Китая изнутри!
http://shop-kid.ru says:
Сеть гипермаркетов представлена не столько в 33 городах рф, http://shop-kid.ru// сколько в казахстане.
https://elegant-store.ru says:
Все доброго времени суток, мои драгоценные читатели Хочу признаться честно, https://elegant-store.ru// что я вообще не подозревала о существовании…
Megapari giriş yapamıyorum says:
Promosyon kodu mağazası için bir sayfadır https://megapari-tr.com/ bu tekliflerimiz ile Megapari’de – ücretsiz bahisler ve ücretsiz dönüşler gibi.
Order herpafend online says:
This rises to 600 mcg DFE if you’re expecting and 500 mcg DFE for those that are nursing.
Feel free to surf to my web site :: http://222.85.191.97:5000/deoncouch49986
https://bel-reenact.clan.su/forum/11-7464-1 says:
� ����������� �� ����� ��������� ��������� ����
https://bel-reenact.clan.su/forum/11-7464-1 ���������.
slot deposit 1000 says:
Great goods from you, man. I’ve understand your stuff
previous to and you are just too magnificent. I actually like what you’ve
acquired here, certainly like what you’re stating and the way in which you say it.
You make it enjoyable and you still take care of to keep it sensible.
I can’t wait to read much more from you. This is really a terrific site.
Aviator game download says:
��� ���� ������� ��������,
Aviator game download ��� ������ ����� ����������.
Aviator game says:
������������ ������� ������.
Also visit my blog https://www.xroxy.com/xorum/viewtopic.php?t=172129
escort paris says:
���� �� ������� ���� ������ � �������, vip https://vip-parisescort.com/, ������ �����, �� ����� � ����� �����������.
http://russia-migrant.ru says:
��� ��� �� ������������� ������ �������� ����� ����� ����������� ������� ������ ������, ��.
Feel free to surf to my website http://russia-migrant.ru/
Parimatch says:
Bahkan pemain pemula mendapatkan kesempatan melihat Parimatch berkat
desain layanan dan kesederhanaan penggunaannya.
https://зеркало-леон10.xyz/ says:
в букмекерских конторах Леон имеются категория “Маржа 0%”, здесь представлено несколько матчей, леон зеркало на которые игрок может.
Visit my website – https://%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BB%D0%B5%D0%BE%D0%BD10.xyz/
https://quickcashcasinohub.za.com/2025/02/12/the-best-backlink-indexer-services-to-try-right-now/ says:
some of them prefer to keep their own methods interacting with the
https://quickcashcasinohub.za.com/2025/02/12/the-best-backlink-indexer-services-to-try-right-now/.
this still means an increase in traffic and improvement of the business.
https://flufbrows.ru/ says:
такие заведения комплексно удовлетворяют потребности наших посетителей, предоставляют самые широкого спектра сервис, но для того, что.
Also visit my web-site; https://flufbrows.ru/
агентство недвижимости Москва says:
Однако, https://www.setestate.ru/ за такой же период закрылось 28 000 тысяч риэлторских компаний.
https://cp.sync.com/file/4336557454/view/doc says:
visitors often people trust all item they encounter without checking its https://cp.sync.com/file/4336557454/view/doc.
леон зеркало вход says:
в то же время владельцы мобильных гаджетов на других ресурсах получат возможность установить https://bk-leonbets-zp.top/ вариант для ios.
https://bk-leonbets-bm.top says:
Посещайте категорию «в указаны все существующие акции, леон зеркало поднять собственный банкролл.
My web page … https://bk-leonbets-bm.top/
леон бет зеркало says:
Здравствуйте. пользующийся популярностью вариант – зайти по всем нашему баннеру https://bk-leonbets-dz.top/ Леона.
https://рабочее-зеркало-леон4.xyz/ says:
Первый тип применяется в ознакомительных целях, леон зеркало второй – дает шанс на получение реальных выигрышей.
Stop by my homepage – https://%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BB%D0%B5%D0%BE%D0%BD4.xyz/
зеркало-леонбет22.xyz says:
программа содействия – делая ставки в букмекерских конторах леон, за каждые выигранные или проигранные 50 рублей, леон зеркало можно.
Feel free to visit my homepage: https://%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BB%D0%B5%D0%BE%D0%BD%D0%B1%D0%B5%D1%8222.xyz/
bk-leonbets-sl.top says:
Леонзеркало сайта, леон зеркало работающее сегодня даётся по следующей ссылке.
Review my web site; https://bk-leonbets-sl.top/
https://photoclub.canadiangeographic.ca/profile/21528156 says:
Подарунки до замовлення, https://photoclub.canadiangeographic.ca/profile/21528156 виходячи з суми.
nomad casino kazakhstan says:
https://nomadcasino24.kz/ заманауи технологияны пайдаланады және береді жоғары деңгей қауіпсіздік.
купить виртуальный номер says:
Выберите услугу freeje optimum. в онлайн более ярда https://qgamer.ru/stati/preimuschestva-pokupki-virtualnogo-nomera-telefona-dlya-biznesa-i-lichnogo-ispolzovaniya.html навсегда активных пользователей.
виртуальный номер says:
так вот, с наскоку зарегистрироваться
не получилось, и так, чтобы я быстро не сдаюсь, купить виртуальный номер навсегда мне пришлось.
Glory Casino says:
Любите ли вы слоты, азартные игры или профессиональные навыки с реальными крупье, http://www.santa4.su/gallery/image/252-play-for-real-money-or-for-free-the-choice-is-yours/ вы найдете обширный выбор развлечений на.
betgaranti güncel giriş says:
ağda otopsi kullanıcılar gadget ‘dan sırasında her zaman zorunlu
kullanmalıdır. Güvenilir mi betgaranti güncel giriş betgaranti adresleri?
https://grodno24.com/2023/05/kakie-birzhi-dlya-torgovli-dostupny-v-belarusi.html says:
Эти платформы сопоставляют человек, https://grodno24.com/2023/05/kakie-birzhi-dlya-torgovli-dostupny-v-belarusi.html позволяя им договариваться об условиях.
https://sub3.aweomenal.com/pocket-option-trader-sovremennyj-instrument/ says:
Площадка мультиязычная, выложено свыше
10 языков, включая русский.
Also visit my web blog – https://sub3.aweomenal.com/pocket-option-trader-sovremennyj-instrument/
https://footballtransfer.com.ua/top/news-130810.html says:
Щоб отримати виграш з C ua casino, через “касу”, https://footballtransfer.com.ua/top/news-130810.html Виберіть розділ ” висновок і створіть замовлення на виплату.
оценка часов says:
эти два подхода существенно воздействуют на денежную сумму, оценка часов которую вам могут выдать под залог швейцарских времени, либо.
https://realno.te.ua/zhyttya/onlajn-kazyno-zseredyny-iak-vlashtovani-ihrovi-platformy/ says:
Нове українське казино, https://realno.te.ua/zhyttya/onlajn-kazyno-zseredyny-iak-vlashtovani-ihrovi-platformy/ які отримало ліцензію 16.09.2024.власник-ТО»³нбосс”.
http://www.fcdnipro.ua/ru/forum/view/3191/ says:
Новая система-на-чипе apple a18 pro получила ту же самую компоновку, что также a17 pro: шесть ядер центрального процессора, из которых два.
my homepage: http://www.fcdnipro.ua/ru/forum/view/3191/
furosemide and gout says:
Elevated arterial hypertension especially often present in patients with chronic renal failure https://forusemidetop.com/ treatment.
https://play.google.com/store/apps/details?id=com.slotmagie.appc says:
разом лучшего эмулятора android – ldplayer вы можете закачать slotmagie и сыграть в воду на своем https://play.google.com/store/apps/details?id=com.slotmagie.appc компьютере.
http://jkg-portal.com.ua/ru/publication/one/platzhn-metodi-v-onlajn-kazino-shho-potrbno-znati-gravcju says:
10 тис. гривень і 300 http://jkg-portal.com.ua/ru/publication/one/platzhn-metodi-v-onlajn-kazino-shho-potrbno-znati-gravcju фріспінов. 4. відмінний ступінь захисту даних гравця.
Glory Casino says:
«Поехали с нами» перезвонит Вам. monte beach resort hotel (ex. Подождите, http://share.psiterror.ru/2024/01/02/shagnite-v-mir-roskoshi-otel-glory.html пожалуйста! Загружаются вопросы.
Glory Casino says:
glory dragon hotel (ex.
my page :: https://bitlygl.mystrikingly.com/
https://alightmotionmodpro.com/using-roboforex-tools-to-make-smart-trading-choices/ says:
Now, https://alightmotionmodpro.com/using-roboforex-tools-to-make-smart-trading-choices/, let’s move on to trading regulations and requirements and figure out whether they match your goals and tasks.
Glory Casino says:
333530 ₽ С перелетом! 202934 ₽ С перелетом! 167403 https://telegra.ph/Velikolepie-i-Gostepriimstvo-Otel-Glory-v-Detalyah-01-02 ₽ С перелетом!
Glory Casino says:
чтобы сорвать куш, вам нужно будет пройти процедуру оформления, а затем выполнить вход. Как подзаработать на пари в https://sites.google.com/view/discover-glory-play/%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D1%81%D1%82%D1%80%D0%B0%D0%BD%D0%B8%D1%86%D0%B0?
education case study says:
thus, researchers are engaged in qualitative research on the base of https://topiccasestudy.com/. they still cannot are able to guarantee the same predictive power as correlation studies.
https://politerno.com.ua/press/yak-otrymaty-ta-aktyvuvaty-promokod-na-cazino-ua/ says:
Крім битв в інтернет – казино, https://politerno.com.ua/press/yak-otrymaty-ta-aktyvuvaty-promokod-na-cazino-ua/# користувачі можуть укладати парі у букмекера ggbet.
https://www.elzamok.ru/ says:
Работа заняла приблизительно 3 часов. Установка происходила через заранее изготовленную https://www.elzamok.ru/ торцевую пластину .
https://www.wing.com.ua/content/view/36089/81/ says:
3. поставте галочку, https://www.wing.com.ua/content/view/36089/81/ що Ви приймаєте правила казино або вам виповнилося 21 рік.
Glory Casino says:
неподалеку от комнаты находится пляж. он был находится в году.
Feel free to visit my blog post … https://sites.google.com/view/bitlygl/
Israel Ancher says:
Teachers and trainees have an unique sort of partnership.
https://www.wing.com.ua/content/view/36093/81/ says:
100% бездепозитний премію при кожному виведення коштів з рахунки!
My site … https://www.wing.com.ua/content/view/36093/81/
https://mosbetuz.net/ says:
Tanishish bilan ma’lumotlar to’plam, oldin murojaat qilish arbitraj -ehtimolmosbetuz
qilish allaqachon mavjud?
Visit my website: https://mosbetuz.net/
вавада казино играть says:
в такой ситуации выход – поиграть на зеркалке Вавада.
Feel free to surf to my website – https://casinovip.online/
goog_rewarded says:
Адаптивна версія оригінального веб-ресурсу знайдеться практично в https://footballtransfer.com.ua/top/news-130811.html#https://footballtransfer.com.ua/top/news-130811.html всіх онлайн казино.
https://poltava365.com/dostupni-igrovi-avtomati-na-sajti-kazino-yua.html says:
Такі клуби далеко не завжди дотримуються стандартів чесного гемблінгу https://poltava365.com/dostupni-igrovi-avtomati-na-sajti-kazino-yua.html і безпеки клієнтів.
mostbetuz.club says:
The interaktiv chat “allows players to communicate with dealers” xususiyati, mostbet adding a social element to The experience. minimal information required: we only ask for essential details, making the sign-up process brief.
My web page https://mostbetuz.club/
http://jkg-portal.com.ua/ru/publication/one/bonusi-cazino-ua-jak-otrimati-maksimum-perevag-dlja-gri says:
щоб замовити блокування, потрібно зв’язатися зі службою техпідтримки casino ua, надавши свої особисті дані: паспортні дані, телефонні.
Feel free to visit my web-site: http://jkg-portal.com.ua/ru/publication/one/bonusi-cazino-ua-jak-otrimati-maksimum-perevag-dlja-gri
steam authenticator says:
not at all has there been anything that could happen because of
the steam authenticator application itself.
casino рокс says:
Перед созданием аккаунта новичкам потребуется изучить всяческие характеристики Пользовательского соглашения,
casino рокс где очень.
Dominique Everhart says:
Appreciate it for this post, I am a big big fan of this site would like to continue updated.
Holly Pittard says:
I got what you mean, thank you for putting up. Woh I am lucky to find this website through google. seriale netflix
ciekawe seriale netflix
nowe filmy netflix
film królowa
do zobaczenia film
polskie seriale hbo
canał plus seriale program
vod seriale
disney channel filmy
kryptonim polska film
filmy tv
darmowe seriale
nowe filmy netflix
kevin sam w nowym jorku kiedy w tv
antoni królikowski filmy
fajne seriale
fajne seriale na netflix
filmy i seriale
canał plus seriale program
diego epoka lodowcowa
kryptonim polska film
fajne seriale na netflix
hbo filmy 2022
filmy tureckie z lektorem
netflix nowości 2022
ciekawe seriale netflix
filmy i seriale
hbo filmy 2022
netflix nowości 2022
netflix najnowsze filmy
canał plus seriale program
kryptonim polska film
filmy i seriale online za darmo
filmy na netflix
fajne seriale na netflix
netflix najnowsze filmy
film skazana
seriale tv online za darmo
dobre seriale netflix
seriale netflix 2022
dobre seriale
filmy tv
netflix nowe filmy
dobre seriale
netflix premiery
emilian kamiński filmy
filmy
seriale tv online za darmo
hbo max filmy 2022
filmy na netflix
nowe seriale
dobre seriale
film królowa
disney channel filmy
filmy i seriale online za darmo
emilian kamiński filmy
filmy tureckie z lektorem
netflix premiery
fajne seriale na netflix
nowe seriale netflix
canał plus seriale program
filmy na netflix
seriale online za darmo
premiery netflix
filmy tureckie z lektorem
netflix seriale 2022
do zobaczenia film
hbo go seriale
seriale online za darmo
nowe filmy na netflix
dobre seriale
antoni królikowski filmy
hbo max filmy 2022
fajny serial netflix
disney channel seriale
fajne seriale na netflix
czarne lustro film
fajne seriale na netflix
hbo max premiery
polskie seriale hbo
seriale tv online za darmo
kryptonim polska film
netflix najnowsze filmy
hbo seriale 2022
seriale netflix 2022
emilian kamiński filmy
fajne seriale
nowe seriale
filmy
filmy tureckie z lektorem
dobre seriale netflix
film królowa
diego epoka lodowcowa
netflix nowe filmy
fajne seriale
hbo max premiery
kevin sam w nowym jorku kiedy w tv
filmy tv
filmy i seriale online za darmo
fajny serial netflix
hbo max filmy 2022
hbo max filmy 2022
film skazana
nowe filmy netflix
nowe filmy netflix
disney channel filmy
film królowa
filmy i seriale online za darmo
netflix premiery
nowe filmy na netflix
disney channel seriale
czarne lustro film
hbo filmy 2022
antoni królikowski filmy
film skazana
seriale
hbo max filmy 2022
seriale online za darmo
film królowa
nowe filmy na netflix
netflix najnowsze filmy
seriale hbo max
nowy film na netflix
disney channel seriale
netflix seriale 2022
emilian kamiński filmy
hbo max filmy 2022
fajne seriale
hbo seriale 2022
netflix seriale 2022
dobre seriale
seriale netflix
netflix premiery
netflix nowości 2022
do zobaczenia film
kryptonim polska film
polskie seriale hbo
emilian kamiński filmy
filmy tv
film królowa
dobre seriale
netflix seriale 2022
seriale tv online za darmo
hbo seriale 2022
nowe seriale
nowe seriale
disney channel filmy
seriale online za darmo
fajny serial netflix
hbo max filmy 2022
seriale netflix
do zobaczenia film
filmy na netflix
nowe filmy na netflix
filmy i seriale
filmy i seriale online za darmo
vod seriale
filmy tv
disney channel filmy
diego epoka lodowcowa
fajny serial netflix
hbo max premiery
seriale tv online za darmo
vod seriale
filmy i seriale
seriale netflix 2022
film skazana
seriale
filmy na netflix
hbo max filmy 2022
hbo seriale 2022
canał plus seriale program
seriale tv online za darmo
seriale tv online za darmo
filmy na netflix
hbo max filmy 2022
film skazana
premiery netflix
seriale netflix 2022
dobre seriale netflix
filmy i seriale online za darmo bez rejestracji
premiery netflix
hbo max premiery
do zobaczenia film
filmy i seriale online za darmo bez rejestracji
hbo max premiery
emilian kamiński filmy
seriale online za darmo
antoni królikowski filmy
filmy
dobre seriale
czarne lustro film
do zobaczenia film
darmowe seriale
polskie seriale hbo
darmowe seriale
filmy tv
netflix seriale 2022
dobre seriale
seriale hbo max
seriale netflix 2022
filmy i seriale online za darmo
netflix najnowsze filmy
hbo max premiery
dobre seriale netflix
filmy i seriale online za darmo
seriale tv online za darmo
kevin sam w nowym jorku kiedy w tv
filmy i seriale online za darmo
dobre seriale
hbo filmy 2022
seriale hbo max
hbo max filmy 2022
dobre seriale netflix
kryptonim polska film
netflix nowości 2022
filmy i seriale online za darmo bez rejestracji
vod seriale
ciekawe seriale netflix
emilian kamiński filmy
czarne lustro film
vod seriale
hbo seriale 2022
filmy tv
kevin sam w nowym jorku kiedy w tv
seriale hbo max
filmy na netflix
filmy tv
fajny serial netflix
netflix premiery
canał plus seriale program
seriale netflix 2022
vod seriale
disney channel filmy
nowe seriale netflix
czarne lustro film
hbo filmy 2022
seriale tv online za darmo
darmowe seriale
seriale tv online za darmo
netflix seriale 2022
vod seriale
disney channel filmy
hbo seriale 2022
filmy i seriale online za darmo
filmy na netflix
netflix nowe filmy
filmy i seriale online za darmo
hbo max premiery
hbo max filmy 2022
seriale online za darmo
filmy
filmy i seriale online za darmo bez rejestracji
seriale tv online za darmo
netflix najnowsze filmy
seriale hbo max
kryptonim polska film
do zobaczenia film
netflix nowe filmy
emilian kamiński filmy
netflix premiery
ciekawe seriale netflix
netflix nowe filmy
ciekawe seriale netflix
hbo filmy 2022
hbo filmy 2022
filmy tureckie z lektorem
darmowe seriale
kevin sam w nowym jorku kiedy w tv
dobre seriale netflix
hbo seriale 2022
seriale netflix
fajne seriale
nowy film na netflix
fajne seriale na netflix
netflix nowości 2022
fajny serial netflix
filmy na netflix
premiery netflix
disney channel filmy
vod seriale
filmy na netflix
film skazana
fajny serial netflix
netflix nowe filmy
darmowe seriale
hbo go seriale
filmy
filmy i seriale
filmy tureckie z lektorem
nowe filmy na netflix
seriale hbo max
hbo max premiery
netflix seriale 2022
filmy tv
premiery netflix
darmowe seriale
filmy tureckie z lektorem
disney channel filmy
filmy i seriale online za darmo bez rejestracji
fajne seriale na netflix
hbo max premiery
netflix seriale 2022
antoni królikowski filmy
diego epoka lodowcowa
nowe filmy na netflix
diego epoka lodowcowa
seriale
nowe seriale netflix
polskie seriale hbo
czarne lustro film
vod seriale
fajne seriale
dobre seriale netflix
filmy tv
filmy na netflix
hbo max premiery
filmy tv
seriale netflix
antoni królikowski filmy
nowe filmy netflix
premiery netflix
fajne seriale
seriale online za darmo
czarne lustro film
disney channel seriale
seriale hbo max
disney channel seriale
film królowa
fajne seriale na netflix
hbo filmy 2022
filmy
kryptonim polska film
film skazana
netflix nowości 2022
film królowa
nowy film na netflix
netflix premiery
disney channel filmy
filmy
seriale netflix
filmy na netflix
seriale netflix
filmy na netflix
film skazana
darmowe seriale
netflix najnowsze filmy
seriale
fajne seriale
kryptonim polska film
filmy i seriale
czarne lustro film
filmy i seriale online za darmo bez rejestracji
hbo filmy 2022
dobre seriale netflix
kryptonim polska film
hbo filmy 2022
fajne seriale
netflix najnowsze filmy
disney channel seriale
netflix premiery
nowe seriale netflix
hbo seriale 2022
hbo go seriale
kevin sam w nowym jorku kiedy w tv
czarne lustro film
emilian kamiński filmy
seriale netflix
netflix premiery
antoni królikowski filmy
seriale hbo max
seriale netflix
fajne seriale na netflix
hbo max filmy 2022
hbo max premiery
dobre seriale
netflix nowe filmy
dobre seriale netflix
disney channel filmy
netflix nowości 2022
antoni królikowski filmy
dobre seriale
seriale hbo max
netflix nowe filmy
filmy tureckie z lektorem
kevin sam w nowym jorku kiedy w tv
fajne seriale na netflix
netflix najnowsze filmy
darmowe seriale
seriale tv online za darmo
netflix nowości 2022
nowe filmy netflix
nowe seriale netflix
diego epoka lodowcowa
filmy tv
czarne lustro film
nowe filmy netflix
filmy i seriale online za darmo
filmy i seriale online za darmo
filmy i seriale online za darmo bez rejestracji
film skazana
film skazana
seriale online za darmo
nowy film na netflix
filmy tv
filmy i seriale online za darmo bez rejestracji
dobre seriale netflix
filmy tv
disney channel seriale
nowe filmy netflix
film królowa
disney channel seriale
netflix premiery
filmy
nowe seriale
netflix nowości 2022
darmowe seriale
hbo max filmy 2022
nowe seriale
canał plus seriale program
seriale hbo max
premiery netflix
canał plus seriale program
filmy
disney channel seriale
netflix nowe filmy
hbo seriale 2022
ciekawe seriale netflix
film skazana
seriale netflix
filmy
emilian kamiński filmy
do zobaczenia film
canał plus seriale program
kevin sam w nowym jorku kiedy w tv
netflix nowości 2022
vod seriale
nowe filmy na netflix
polskie seriale hbo
diego epoka lodowcowa
do zobaczenia film
netflix nowości 2022
nowe seriale
ciekawe seriale netflix
kryptonim polska film
hbo seriale 2022
dobre seriale netflix
fajny serial netflix
darmowe seriale
netflix premiery
film królowa
diego epoka lodowcowa
filmy i seriale online za darmo
netflix seriale 2022
nowe filmy na netflix
film królowa
seriale netflix
czarne lustro film
filmy i seriale online za darmo
seriale
hbo filmy 2022
seriale hbo max
nowe seriale netflix
polskie seriale hbo
disney channel seriale
hbo max premiery
filmy i seriale
fajny serial netflix
emilian kamiński filmy
netflix premiery
netflix premiery
netflix nowe filmy
hbo max premiery
kryptonim polska film
nowy film na netflix
canał plus seriale program
vod seriale
kevin sam w nowym jorku kiedy w tv
https://realno.te.ua/zhyttya/bonusy-onlajn-kazyno-chudovyj-start-dlia-novykh-hravtsiv/ says:
4. збереження прогресу і налаштувань. 5. цілодобова техзабезпечення.
Feel free to surf to my web site – https://realno.te.ua/zhyttya/bonusy-onlajn-kazyno-chudovyj-start-dlia-novykh-hravtsiv/
http://hnb.com.ua/news/s-sport-reestratsiya_v_onlayn_kazino_krok_za_krokom-6221 says:
10. техпідтримка мережевих казино доступна 24-7 і готова запропонувати тлумачення на самий прискіпливий категорії питань. 02141, м.
Take a look at my web blog; http://hnb.com.ua/news/s-sport-reestratsiya_v_onlayn_kazino_krok_za_krokom-6221
https://autoplus.su/news/registraciya-v-bukmekerskoj-kontore-mostbet-uzbekistan.html says:
в случае с киберспортом Мостбет сохранил динамический отношение к
появлению маржи.
Here is my blog post :: https://autoplus.su/news/registraciya-v-bukmekerskoj-kontore-mostbet-uzbekistan.html
cryptoboss casino официальный сайт зеркало says:
в конкретном формате лучше сыграть в колесо удачи, баккару, cryptoboss casino официальный сайт зеркало
разные карточные и ролевые игры.
https://fauzinfotec.com/index.php/2025/02/05/analiza-portalu-slottica-casino/ says:
играть легко можно с https://fauzinfotec.com/index.php/2025/02/05/analiza-portalu-slottica-casino/ всех
типа устройств.
казино криптобосс says:
Надёжная диета для зачисления и забора денег.
My site: https://cryptobosscasino.art/
http://midaris.forum24.ru/?1-14-0-00000054-000-0-0 says:
для рекомендаций требуется прибегнуть к менеджеру http://midaris.forum24.ru/?1-14-0-00000054-000-0-0 магазина.
Каталог магазина достаточно обширный.
https://www.iyfusa.org/group/iyfusa-group/discussion/9aae1d16-fbf9-471d-86e4-f6a50601320e says:
Here is my webpage; https://www.iyfusa.org/group/iyfusa-group/discussion/9aae1d16-fbf9-471d-86e4-f6a50601320e
https://golossokal.com.ua/porady/betking-casino-u-chomu-perevahy-platformy.html says:
для проведення азартних розваг в Україні почали видавати ліцензії строком https://golossokal.com.ua/porady/betking-casino-u-chomu-perevahy-platformy.html на 5 років.
https://golossokal.com.ua/porady/yak-pochaty-hraty-v-onlayn-kazyno-na-casino-ua.html says:
чим довше він виходить, https://golossokal.com.ua/porady/yak-pochaty-hraty-v-onlayn-kazyno-na-casino-ua.html тим більший виграш отримати. 4.
https://www.weddingbee.com/members/kukri3145/ says:
Les points de trading disponibles incluent les gains de l’équipe,
le total nombre de cartes, les cartes de handicap, le score exact de l’équipe/joueur, https://www.weddingbee.com/members/kukri3145/ melbet et beaucoup plus.
машина для тарифа бизнес яндекс такси 2025 says:
для путешествий из конкретного города в другой машина для тарифа бизнес яндекс такси 2025 выбирайте «Межгород».
купить воблер bearking says:
Но будьте внимательны, продавец меряет длину воблеров вместе с тройниками: там, где он пишет 11 см, https://bearking.cn.ua/ на самом деле всего.
https://www.rslonline.com/international-money-transfers/ says:
Global payment gateways allow companies to easily make https://www.rslonline.com/international-money-transfers/ and make multiple payments.
лучшая клиника в Турции says:
«Мединцентр» поддерживает многие виды седации (внутривенно, https://www.elitedenteam.co.il/ перорально и ингаляционно) или общий наркоз для.
https://www.bookmarking-fox.win/digital-picture-alteration says:
My face looks almost the same as in real everyday with https://www.bookmarking-fox.win/digital-picture-alteration.
crazy time app download says:
তিনি অহংকারপূর্ণভাবে ভুলে যান যে বিশেষ করে মাফিয়া নেতাদের ধন্যবাদ, এবং ভেগাস পুলিশ এবং.
My web site … https://play.google.com/store/apps/details?id=com.cybercraft.crazy.time
http://whatcomcountyguide.com/ says:
The payout ratio of 80:1 is quite high order/cause a stir in the http://whatcomcountyguide.com/ machine, but is not so high that the user could to withdraw funds and exit the game.
http://botsman-service.ru says:
Природа возведения и ремонта судов не поддается традиционным инженерным http://botsman-service.ru// подходам.
http://electrolux-online.ru/ says:
мы помимо этого предлагаем бытовые и промышленные вентиляторы для принудительного перемещения воздушных масс и удаления запахов,.
my webpage – http://electrolux-online.ru/
Monte Amerson says:
At this time it appears like Drupal is the preferred blogging platform available right now. (from what I’ve read) Is that what you are using on your blog?
http://arbat-tour.ru/ says:
Часто более экологичным способом станет железнодорожный транспорт, http://arbat-tour.ru/ каковой не перестаёт зарабатывать популярность.
https://portal.magnoliauniversity.io/mastering-login-to-bc-games-the-ultimate-online/ says:
gratifying see that casinos transparently and honestly https://portal.magnoliauniversity.io/mastering-login-to-bc-games-the-ultimate-online/, and I would recommend it to those who are not
indifferent to cryptocurrency games!
http://electron-24.ru/ says:
все эти дисциплины взаимно связаны и являют собой физико-технические основы создания элементной базы информационных механизмов и.
Also visit my site; http://electron-24.ru/
Grant Bon says:
These jackpots could be standalone, local, or networked throughout a quantity of casinos.
1xbet aviator predictor says:
The game Gold Rush Gus is so popular that what was released sequel: Gold Rush Gus and a city riches of https://xbetdownload.in/aviator/.
http://www.soggiornobelvedere.it/betwinner-aviator-the-ultimate-guide-to-thrills/ says:
2. log in to category “login and password”: After logging in to electronic account http://www.soggiornobelvedere.it/betwinner-aviator-the-ultimate-guide-to-thrills/ go to section “individual information” in settings of your your registration.
1xbet зеркало казино says:
тут в наличии предметные промо акции для новичков и регулярных посетителей, в том числе бездепозитный поощрение 1xbet casino, 1xbet зеркало.
Feel free to surf to my web blog; https://people4thepeople.org/
https://rosangelarubbo.com.br/2025/02/20/bc-game-revolutionizing-the-online-gaming/ says:
The best welcome discounts for gambling using cryptocurrencies
will be able to meet your first deposit, will you with several free spins,
the https://rosangelarubbo.com.br/2025/02/20/bc-game-revolutionizing-the-online-gaming/ and other privileges.
https://waze.uservoice.com/forums/59223-waze-suggestion-box/suggestions/47794733-how-to-find-the-best-casino says:
maybe this message will be sent to the folder for spam in which you place your https://waze.uservoice.com/forums/59223-waze-suggestion-box/suggestions/47794733-how-to-find-the-best-casino.
http://clothess.ru says:
нескольких до а затем дня рождения действует http://clothess.ru// скидка именинника.
http://avtosvit.biz/tormoznyie-kolodky-ot-cheho-zavysyt-vasha-bezopasnost/ says:
Для замовників тут http://avtosvit.biz/tormoznyie-kolodky-ot-cheho-zavysyt-vasha-bezopasnost/ діє дисконтна система.
http://deformation.pp.net.ua/forum/6-3821-1 says:
Заказ изготовляется на сайте bolt food всего за несколько касаний http://deformation.pp.net.ua/forum/6-3821-1 экрана. что представляют из себя bolt market?
https://StemCellCostNavigator.com says:
the cost of stem cell treatment is able influence number of factors, including the type of stem cells used, the number of necessary injections, the https://StemCellCostNavigator.com//, and the location of the treatment center.
https://AffordableStemCellTreatment.com says:
The proposed hypothesis, presented in this review, was put forward based on (1) the calculated number of recovered patients based on data of published clinical reviews; (2) applied the experience of performers in curing diseases related to the.
Here is my blog: https://AffordableStemCellTreatment.com/
http://arandarp.forumex.ru/viewtopic.php?f=35&t=316 says:
рекомендуется, дабы весь посадочный материал возможно было купить в одном месте, где позаботятся о бережной и своевременной отправке и.
Here is my website http://arandarp.forumex.ru/viewtopic.php?f=35&t=316
https://AutismTreatmentItaly.com/ says:
for example, during treatment with https://AutismTreatmentItaly.com/, new drugs necessary to look for environmental friendliness and safety by applying them to specialized cells differentiated from a clone of stem cells.
https://kut24.ru/main/zakazat-kejtering-v-moskve/ says:
не приходится расходовать уйму времени на факт, https://kut24.ru/main/zakazat-kejtering-v-moskve/ чтобы разогреть его перед практикой».
steam desktop authenticator says:
If your problem is not available in price list or none of the solutions helped, https://sdasteam.com/ will send notification about the problem to electronic account.
http://blabbclear.bestforums.org/viewtopic.php?f=5&t=560 says:
Получайте уведомления об эксклюзивных распродажах и купонах на часто покупаемые товары.
Also visit my web site http://blabbclear.bestforums.org/viewtopic.php?f=5&t=560
headshotphoto.ca says:
I needed head shots in my new position, and thanks previous experience working with https://telegra.ph/How-Much-Do-Professional-Headshots-Cost-03-20, I realized that photo printing Borea Perry is optimal choice.
https://StemCellTherapyInCanada.com says:
Efficacy of intravenous mesenchymal stem cells for regeneration of motor activity after ischemic stroke: https://StemCellTherapyInCanada.com//, neuroimaging study. 179.Mansour Sr., Zabihi E., Ghasemi-Kasman M.
https://StemCellCostCheck.com/ says:
Consultations with medical subordinates and search authentic languages help people to make informed answers about {potential |possible methods of https://StemCellCostCheck.com/ in autism spectrum disorders.
http://solid-int.com/category/uncategorized/page/2/ says:
একটি অনলাইন ব্যক্তিত্বের সাথে একটি ইতিবাচক খ্যাতি হল খুব আকর্ষণীয় ভিন্ন কারণগুলির জন্য:.
Feel free to visit my website; http://solid-int.com/category/uncategorized/page/2/
https://AutismTherapyCanada.com/ says:
In cases of arthritis, injury, or degeneration of the knee joint, doctors increasingly inject bone marrow https://AutismTherapyCanada.com/ or fat cells into the sphere of the joint.
https://StemTherapyCost.com/ says:
if you are going to take a course in cell therapy, not focus on price in order find suitable attending physician. cost does not meet the https://StemTherapyCost.com/.
https://AutismTherapyWithStemCells.com/ says:
in particular, “a comprehensive scheme for treatment with stem cells in Mexico can cost from $3,000 to $6,000, which is significantly lower than the https://AutismTherapyWithStemCells.com/ that patients could pay in the USA.
https://turistum.ru/tuapse/ says:
Моте́ль (англ.
My site https://turistum.ru/tuapse/
https://StemCellTreatmentInsights.com/ says:
but https://StemCellTreatmentInsights.com/.
купить диплом техникума в санкт-петербурге says:
Поэтому расчет творится только после получения произведенного диплома заказчиком, https://178dypls.com/kupit-diplom-srednem-professionalnom-obrazovanii-spb/ а.
live cam sex says:
but what about dominant leather bondage from a JOI lover, foot fetish, https://live-sex-cam-girls.stream/ dildos?
купить официальный диплом says:
Оригинальные бланки ГОЗНАК используются в процессе оформления каждого https://msk-dopza.com/kupit-diplom-moskva-cena/ документа.
листовки а5 says:
перед каждым предпринимателем вне зависимости от масштабов огромный вместе с нею ее направления стоит задача – найти новеньких.
my blog post – https://www.mosprint77.ru/
всі нові кредити з поганою історією says:
Візьміть невелику першу позику – кілька тисячі гривень.
Stop by my website: https://fina.guru/blog/vsinovikredytyzpoganoyuistorieu
https://zdnete.de/renditemaximierung-durch-antalya-zum-verkauf-stehende-immobiliensteuerplanung/ says:
Таиланд славится чистыми красивыми пляжами, https://zdnete.de/renditemaximierung-durch-antalya-zum-verkauf-stehende-immobiliensteuerplanung/ доступными ценами.
https://techduffer.com/optimizing-modern-communication-the-rise-of-virtual-did-numbers/ says:
At gray a highly qualified team of our specialists is working they publish reports, write, edit they form https://techduffer.com/optimizing-modern-communication-the-rise-of-virtual-did-numbers/ content that informs communities to which we serve.
/discussion/comment/2809664 says:
фанат выбирает события для заключения онлайн-пари – на день обращения или на следующий день, на конкретные дисциплины, здесь точный.
Here is my page – https://www.arcgames.com/ru/forums/nwru
Lucky Jet says:
what sets the game completely unique is this everything that here implements the provably honest https://adirectorysubmit.com/listings13151840/experience-the-thrill-of-lucky-jet-by-1win system, which ensures genuine randomization of each session.
Anton Barclay says:
I was suggested this web site by my cousin. I’m not sure whether this post is written by him as nobody else know such detailed about my trouble. You are wonderful! Thanks!
https://techbullion.com/what-is-the-best-automated-crypto-trading-platform/ says:
Automated trading has already proven its effectiveness in the process operation of millions of https://techbullion.com/what-is-the-best-automated-crypto-trading-platform/.
vaggo bet says:
Germany won the 2023 tournament, the USA missed the tournament again, and the https://studiolegalebitetti.it/2025/04/03/ten-finest-a-real-income-web-based-casinos-to-possess-usa-participants-within-the-2025/ login took fourth place. Australia, India, South Africa and England are the favorites to win the tournament.
Wilhemina says:
Thank you for some other wonderful post. The place else may anyone
get that type of information in such an ideal manner of writing?
I have a presentation subsequent week, and I am at the look for such info.
xxxworld.top says:
This design is steller! You certainly know how to keep a reader amused.
Between your wit and your videos, I was almost moved to start my own blog (well, almost…HaHa!) Great
job. I really enjoyed what you had to say, and more than that,
how you presented it. Too cool!
Glenda Delamothe says:
Looking for a private Instagram viewer? while many online tools allegation to let you see private Instagram profiles, most are scams, phishing attempts, or malware traps. Instagrams strict privacy policies make it nearly impossible to right of entry private accounts without the users approval. otherwise of risking your security taking into consideration subjective third-party apps, the unaccompanied valid exaggeration to view a private profile is by sending a follow request and waiting for approval. Always prioritize online safety and avoid facilities that settlement unauthorized accessthey often violate Instagrams terms and could compromise your account. For real viewing, engage in the manner of users directly or probe public content responsibly.
thepornmap.top says:
I know this web page presents quality based articles or reviews and
other material, is there any other website which provides such information in quality?
cialis and nitrates says:
inhalt tadalafil package insert afflicted buy cialis online cheap https://cialis-otc.com/ – cialis delivery to australia [url=https://cialis-otc.com]cialis without prescription[/url] radicales cialis delivered in 24 hours
book of ra fixed online kostenlos spielen says:
say, on the https://www.ereservationz.com/book-of-ra-kostenlos-ferner-im-novoline-casino-verbunden-vortragen you can study how often each team won 6-point matches in the teaser, or which NBA players received greatest income from use of specific gambling details.
mypornlist.top says:
Hi there very nice site!! Man .. Excellent .. Amazing .. I will bookmark
your site and take the feeds additionally?
I am satisfied to seek out numerous useful information right
here within the publish, we want work out more techniques on this regard, thanks for sharing.
. . . . .
Gorilla Casino says:
однако всё же в роли реальной и эффективной методики мной может быть использована в этой схеме сочетание психосинтеза и.
my web-site; https://video-fish.ru/
http://proekt.media/wp-content/uploads/2018/09/Listov_approved.jpg says:
Сер.: аналитика и управление. Сер.: Филология. Журналистика. – 2021. – № 4. http://proekt.media/wp-content/uploads/2018/09/Listov_approved.jpg – С.
eroticlinks.top says:
Fantastic goods from you, man. I have understand your stuff previous to and you’re just extremely excellent.
I actually like what you’ve acquired here, certainly like what you’re stating and the way in which you say
it. You make it enjoyable and you still care for to keep it smart.
I can not wait to read far more from you. This is really
a great web site.
champion slots без верификации says:
Предпринимателям необходимо, чтобы процесс установки проходил максимально слаженно, https://championslots.cloud/ занимал незначительное.
pornarchive.top says:
Hello, I read your blog like every week. Your story-telling style is witty, keep
doing what you’re doing!
https://medium.com/@seraphinawemberly/massage-in-london-a-journey-through-time-techniques-and-tranquillity-dc75c2ec9a02 says:
When I massage ashiatsu, I mostly https://medium.com/@seraphinawemberly/massage-in-london-a-journey-through-time-techniques-and-tranquillity-dc75c2ec9a02 I massage your body.
Стейк онлайн says:
You mentioned that adequately!
p9830 says:
играет роль и оформление. nice change. один из хороших обменников в http://vid.foroesp.com/viewtopic.php?id=2689#http://vid.foroesp.com/viewtopic.php?id=2689 криптопространстве.
pornhome.top says:
What a information of un-ambiguity and preserveness of
valuable familiarity regarding unexpected emotions.
Регистрация в Чемпион Слотс says:
Регистрация проста и доступна через официальный https://championslots.today/ сайт либо приложение.
intracorp.com.sg says:
they more can to serve regional gamblers from state, at what point registered the head bank of https://https://intracorp.com.sg//.
freesafeporn.top says:
I’m not sure why but this web site is loading very
slow for me. Is anyone else having this problem or is
it a issue on my end? I’ll check back later on and see if the problem still exists.
thailand-company.ru says:
для фирм, осуществляющих международные операции, большое {значение имеет} система налогообложения дивидендов, https://thailand-company.ru/
роялти.
Hype казино официальный сайт says:
Хотите испытать удачу? Добро пожаловать в Hype Casino! На нашей платформе доступны лучшие слоты, рулетка, покер и блэкджек, а также щедрые поощрения чтобы сделать игру еще увлекательнее. https://hype-playcraze.wiki/.
Почему тысячи игроков выбирают Hype Casino?
Надежные и безопасные финансовые операции с максимальной прозрачностью.
Большой выбор игр, включая последние новинки.
Ежедневные акции и VIP-статусы, улучшающие ваш игровой опыт.
Регистрируйтесь в Hype Casino и выигрывайте реальные деньги!
bullx solana says:
however since in game plan dice with real croupiers real dice are used, thrown by a mechanical hand, and besides sharp sensations from online games with playmates , observing in order how specified dice fall on a long felt-covered table, maybe very.
Feel free to visit my site; https://engineersforum.com.ng/2019/11/17/blockchain-inter-operability-will-improve-security-performance-and-usability-in-enterprise-use/
https://proektmedia-stat.ams3.digitaloceanspaces.com/2018/10/sosed-putina-boris-listov.png says:
6.5.8. в разных местах определяются https://proektmedia-stat.ams3.digitaloceanspaces.com/2018/10/sosed-putina-boris-listov.png победители регионального этапа. 5.15.
http://remont-traktor.ru/ says:
по решению сентябрьского (1953) Пленума ЦК КПСС в всякой МТС и профессиональной станции создаётся обменный фонд агрегатов и узлов.
Take a look at my homepage :: http://remont-traktor.ru/
Virtual staging in LA says:
our platform provides an opportunity to create, improve Virtual staging in LA and share your content in 360 degree
format.
http://spotstore.ru/ says:
↑ М. В. Лысенко, http://spotstore.ru/ Э. ↑ 1-2 bridget williams. Устаревший вариант магазейн заставляет предположить заимствование из нидерл.
http://newmebelshop.ru/ says:
мебель, изготовленная по европейским канонам качества, http://newmebelshop.ru/ доступна онлайн.
http://tverfootball.ru says:
Появилось персональное минутку для http://tverfootball.ru// тренировок. на начало 2012г.
http://superstretching.ru/ says:
Медитация при ходьбе бывает замечательным способом восстановить равновесие вашей нервной систем и привнести осознанность в вашу.
my web page; http://superstretching.ru/
http://soullabstore.ru/ says:
Залейте раствор в формы, http://soullabstore.ru/ сбрызните поверхность спиртом для устранения пузырьков. Затвердевание.
professional home staging says:
But sellers and buyers of real estate who use https://www.aniarticles.com/48115-home-staging-in-los-angeles-sell-faster-and-for-top-dollar higher requirements on the quality of media.
http://x-woman.ru says:
В каком возрасте предпочтительнее http://x-woman.ru// заниматься балетом?
http://manipulator777.ru says:
С предположительными прайсами и видами машин заказчик получите замечательную возможность ознакомиться в личном профиле специалиста.
my web page :: http://manipulator777.ru/
https://proektmedia-stat.ams3.digitaloceanspaces.com/2019/01/bob_king_main_image.jpg says:
А. Марков,Е. Г. Гуреева, А. 6. Попов В. Л., https://proektmedia-stat.ams3.digitaloceanspaces.com/2019/01/bob_king_main_image.jpg Д. В. Крутова. Управление выпуском и операциями.
http://amazonia-bor.ru says:
в каждом пространстве должны http://amazonia-bor.ru// являться всевозможные тренажеры.
http://bel-vitamebel.ru/ says:
Take a look at my page http://bel-vitamebel.ru/
https://www.wildberries.ru/catalog/tags/slabitelnye says:
Главное о чрезвычайной ситуации на сайте wildberries в спб (неопр.). 2017-10-07. – С. 10. Архивировано 9 мая https://www.wildberries.ru/catalog/tags/slabitelnye 2021 года.
http://aodes82.ru says:
Встречайте новинку kosadaka marvel cork в fmagazin! kosadaka array – маленький червячок, http://aodes82.ru// который сумел!
http://mosavtomaster.ru/ says:
Продувка является слабым http://mosavtomaster.ru/ звеном двухтактного цикла.
http://elektrick-market.ru says:
2. Работающее с рудничным метаном (группа http://elektrick-market.ru// i).
http://bgsale.ru says:
Повышен уровень автоматизации при заполнении платежных поручений на уплату налогов.
Stop by my website; http://bgsale.ru/
http://online-docs.ru/ says:
Используйте речь идет о по для открытия файлов, http://online-docs.ru/ навигации по вкладкам и преобразования роликов в формат pdf.
http://kleistroy.ru/ says:
комфортный и интуитивно понятный интернет-магазин расходных материалов «Аквилон» позволяет изучить каталоги продукции, сопоставить.
Feel free to visit my page: http://kleistroy.ru/
http://mebel-werk-optom.ru/ says:
наш онлайн-магазин продает широчайший ассортимент кроватей, http://mebel-werk-optom.ru/ шкафов и обратной мебели недорого от производителя.
http://lodki-shop.ru says:
мы предоставляем шанс заказать недорого любую понравившуюся модель на нашей площадке http://lodki-shop.ru// сайте.
http://strap-shop.ru/ says:
Так, http://strap-shop.ru/ в Афинах магазины располагались в стое на агоре и на близлежащих улицах. columbia university press, 2011. – p. 76. – 368 p.
http://santechmontage.ru/ says:
25. нужно вести работу, не 24 часа в сутки, а головой. Есть базовая информация, http://santechmontage.ru/ необходимая для каждого современного человека.
http://electro43.ru says:
Отзыв №2: Пришло под рукой, вольтаж показывает, http://electro43.ru// телефон заряжается. по внешнему виду очень качественная.
ReportsAndUpdates.com says:
I used to be able to find good info from your articles.
http://laskastore.ru/ says:
так, приготовление пищи стало универсальным признаком человека, http://laskastore.ru/ как биологического вида. Дата обращения: 23 апреля 2022.
https://www.wildberries.ru/catalog/dom/mebel/mebel-dlya-kxraneniya/komody/tags/komod-na-balkon says:
И чете удалось выкрутиться https://www.wildberries.ru/catalog/dom/mebel/mebel-dlya-kxraneniya/komody/tags/komod-na-balkon из сложной ситуации.
http://cosmetic-lux.ru/ says:
А бренд sisters aroma подарит вам свежие и феерические впечатления и откроет ворота в мир http://cosmetic-lux.ru/ ароматерапии.
http://ivremonte.ru says:
наш сайт с 2013 года занимаемся постгарантийным http://ivremonte.ru// обслуживанием техники apple.
buy dapoxetine with cialis says:
giggel indian brand names of tadalafil argentina crops cialis use in dogs https://ciatadgen.com/ – cialis dosage reddit [url=https://ciatadgen.com]cialis walmart price[/url] enthrall canadian meds cialis
Анимач аниме онлайн says:
вам нужно только произвести несколько кликов мышкой и одновременно с основополагающими героями вы перенесетесь в том увлекательный.
Here is my web page https://animach.monster/
Проститутки Казани says:
Проезжающие мимо машины называют их шалавами, шлюхами, https://feyakazani.com/ однако парочка остановившихся машин однако найдется.
Rocco Siddins says:
I know this web page provides quality depending articles and additional stuff, is there any other web site which presents such stuff in quality?
https://slightwave.com/christofle-flatware-leader-in-the-global-cutlery-market/ says:
When electroplating coatings on https://slightwave.com/christofle-flatware-leader-in-the-global-cutlery-market/, specially prepared workpieces are immersed in a bath containing precious metal, and after exposed to voltage and power .
duhiguerlain3.ru says:
1. Разновидностью парфюма.
Also visit my page; http://duhiguerlain3.ru/
https://www.photorecept.ru says:
хорошо подойдет к любым блюдам из жареного или запеченного мяса https://www.photorecept.ru// или птицы.
Michele Reddall says:
Ядовитый дурман — это немерено безопасное развлечение, а этап ко разрушению. Кокаин, мефедрон, эфедрин, МДМА, что-что также трава, гашиш и бошки порождают зависимость, разламывают нервную систему, рушат здоровье. Временная торч обворачивается депрессией, тревожностью также потерей смысла. Хоть “лёгкие” наркотики — элитный шаг к серьёзным проблемам. Целесообразно ли минутное удовольствие обломанной жизни?
duhiguerlain1.ru says:
современные принципы дали возможность добиться фотографически http://http://duhiguerlain1.ru// точный запах клубники.
http://duhiguerlain2.ru/ says:
также указанный разновидность парфюмерии, как правило, http://duhiguerlain2.ru/ славится масштабными рекламными кампаниями.
adultvault.top says:
Fantastic website you have here but I was curious if
you knew of any message boards that cover the same topics discussed in this article?
I’d really like to be a part of community where I can get
feedback from other knowledgeable people that share the same interest.
If you have any recommendations, please let me know.
Many thanks!
pornleaders.top says:
This is the perfect webpage for anybody who hopes to understand this topic.
You know so much its almost hard to argue with you (not that I really
will need to…HaHa). You certainly put a brand new spin on a
topic that’s been written about for ages. Great stuff,
just wonderful!
Rad Maxx Slot says:
Hacksaw Gaming’s https://wiki.team-glisto.com/index.php?title=Benutzer:Bennie1941 revisits the gritty urban setting and character dynamics of RIP City, but with a significant mechanical twist.
iwantporn.top says:
Hi to every one, it’s actually a good for me to visit this website, it consists of valuable Information.
https://litmisto.org.ua/?p=28205 says:
все це і надійність, https://litmisto.org.ua/?p=28205 оскільки будь-які транзакції за допомогою криптовалюта захищені криптографією.
onepornlist.top says:
Hi, I do think this is an excellent website. I stumbledupon it 😉 I will revisit yet again since I saved as
a favorite it. Money and freedom is the best way to change, may you be
rich and continue to guide others.
pornlistboom.top says:
I have been browsing on-line greater than three hours as of late, but I by no means found any interesting article like yours.
It’s lovely worth enough for me. In my view, if all website owners and bloggers
made excellent content material as you probably did, the internet shall be a lot more
helpful than ever before.
Dell Lassiter says:
Looking for a private Instagram viewer? while many online tools claim to let you see private Instagram profiles, most are scams, phishing attempts, or malware traps. Instagrams strict privacy policies make it nearly impossible to access private accounts without the users approval. then again of risking your security next unreliable third-party apps, the unaccompanied true quirk to view a private profile is by sending a follow request and waiting for approval. Always prioritize online safety and avoid services that union unauthorized accessthey often violate Instagrams terms and could compromise your account. For true viewing, engage next users directly or study public content responsibly.
pornlist18.top says:
It’s a pity you don’t have a donate button! I’d definitely donate to this superb blog!
I suppose for now i’ll settle for book-marking and adding your RSS feed to my Google account.
I look forward to fresh updates and will share this website with
my Facebook group. Chat soon!
mainpornsites.top says:
I am regular reader, how are you everybody? This post posted at this web page is truly nice.
https://verde-casino-bonus.de/ says:
Nach Aktivierung von kostenlosen Spins/ Versuche https://verde-casino-bonus.de/ muss/muss/sollte/muss machen ein paar/mehrere Bedingungen, bevor Sie wasSie können platzieren Antrag für Auszahlungen|Überweisungen} Gewinne ähnlich echtem Geld.
pornpen2.com says:
With havin so much written content do you ever run into any issues of plagorism or
copyright violation? My website has a lot of exclusive content I’ve either authored myself or outsourced but it
seems a lot of it is popping it up all over the web
without my authorization. Do you know any techniques to help protect
against content from being stolen? I’d genuinely appreciate it.
https://1winqk.xyz/ says:
5. Подтверждение. нажмите клавишу “Пополнить”, 1win следуйте указаниям в кинокартине для завершения трансфера.
Look at my page – https://1winqk.xyz/
1win-s5.top says:
Все развивается с приветственного бонуса, а потом у игроков есть шанс участвовать в программах кэшбэка и турнирах.
Here is my webpage :: https://1win-s5.top/
http://mobidikii.myqip.ru/?1-14-0-00000031-000-0-0 says:
Агентство Владис – ваш верный помощник во всех видах операций с недвижимым http://mobidikii.myqip.ru/?1-14-0-00000031-000-0-0 имуществом.
sarbc.ru says:
Следовательно, при недочете фолиевой кислоты в организме, как выбрать витаминный комплекс сон бывает нарушен.
Have a look at my web page … https://www.sarbc.ru/link_articles/kak-vybrat-luchshij-vitaminnyj-kompleks-7-kriteriev-kotorye-nelzya-ignorirovat.html
https://ondagoo.com/tabletop-sign-holders says:
This is a timely and poignant exploration of race, class, https://ondagoo.com/tabletop-sign-holders privileges, and in addition the difficulties of family life.
https://comoayudar.org/top-10-casino-gambling-sites-for-real-money-in-the-40/ says:
after receiving the approval, it will be processed immediately,
but receiving may take up to three days.https://comoayudar.org/top-10-casino-gambling-sites-for-real-money-in-the-40/
https://pensionampark.com/shopdaddy-studio-eu says:
Die moderne Speisekarte zeichnet sich durch süßes Design aus https://pensionampark.com/shopdaddy-studio-eu und ein besonderes Finish. Entsprechendes Farbdesign: Die Farben, die dem Markenstil der Einrichtung entsprechen, erhöhen die Bekanntheit.
https://www.renderosity.com/users/mysmileby says:
Клиника cerecon кроме того обладает Вам протезирование cerec – это инвазионная https://www.renderosity.com/users/mysmileby стиль производства протезов.
serif typeface says:
if someone have to squint to make out the text, choose https://typetype.org/fonts/serif/, what differ in bolder or blurred font.
eliteluxuryyacht says:
Fascinating tech! If you’re in Dubai and looking for a unique luxury experience, check out Elite Luxury Yacht Rental LLC for an unforgettable yacht adventure.
https://pl.hinative.com/questions/12347572 says:
Скористайтеся можливістю об’єднатися з друзями для групової https://pl.hinative.com/questions/12347572 покупки тренінгів.
http://chayka-wedding.ru/agentstvo-nedvizhimosti-shhelkovo-vash-nadezhnyj-3/ says:
содействие в предоставлении http://chayka-wedding.ru/agentstvo-nedvizhimosti-shhelkovo-vash-nadezhnyj-3/ кредитов.
http://www.rohitab.com/discuss/user/2628078-petlikoleg/ says:
Проведіть аналіз тренінгів.
Зберіть відгуки про організаторів,
http://www.rohitab.com/discuss/user/2628078-petlikoleg/ якість відео та досвід викладачів.
Bonita Corral says:
Wonderful beat ! I would like to apprentice while you amend your site, how can i subscribe for a blog website? The account aided me a acceptable deal. I had been tiny bit acquainted of this your broadcast provided bright clear idea
https://my.omsystem.com/members/kalyancity says:
safety evaluation and risk assessment of electronic cigarettes as tobacco cigarette substitutes: a systematic review // therapeutic advances https://my.omsystem.com/members/kalyancity in drug safety.
https://absolutstandart.ru/ says:
в большинстве случаев через месяц с начала периода продления на нашем сайте ставится заглушка https://absolutstandart.ru/ регистратора.
https://619.com.ua/kak-rabotayut-kriptoobmenniki-vash-gid-po-bystromu-i-bezopasnomu-obmenu-valyut says:
Вид. друге, стер. Київ: Либідь, https://619.com.ua/kak-rabotayut-kriptoobmenniki-vash-gid-po-bystromu-i-bezopasnomu-obmenu-valyut 2002. 616 с. Попов В.що таке криптовалюта?
https://ftnnews.com/destinations/middle-east/uae/the-best-day-trips-from-dubai-explore-beyond-the-city/ says:
When https://ftnnews.com/destinations/middle-east/uae/the-best-day-trips-from-dubai-explore-beyond-the-city/, necessary carefully inspect transport for object possible damage. usually, the price list includes basic insurance.
https://mediators.minhealth.bg/upptack-varlden-av-videoslots-en-djupgende-guide/ says:
detta pratar om bland annat att behöver certifiera ditt konto registrering genom bankid och vad för spela på https://mediators.minhealth.bg/upptack-varlden-av-videoslots-en-djupgende-guide/ du måste vara över 18 år gammal.
lastPostAnchor says:
we offer various types of smoking pipes, such as long smoking pipes, https://cartagena.activeboard.com/t71784874/premium-pipe/?page=last#https://lasvegasgamblingforum.activeboard.com/t71791387/wood-pipe-designs/?page=last, rose hips.
https://exportingofamerica.com/rent-a-car-in-uae-guide/ says:
what could be worse than finding out that your
specified car is the size of a tiny matchbox, well in client’s luggage {you|don’t even have {space|square
meters|areas} for https://exportingofamerica.com/rent-a-car-in-uae-guide/!
Luckyme Slots Casino says:
The weekly maximum withdrawal limits money at the https://espauntravel.com/how-to-build-a-profitable-global-online-gambling-3/ review vary from 2500 to 3000 dollars, while the minimum withdrawal amounts vary from 25% to 150 dollars.
William Hill Casino says:
Gracias a playtech y William Hill Casino de ahora en adelante puedes sumergirte en su mundo
y arriesgarte con de este tipo personajes como Ivan Drago, Apollo Creed
o Clubber lang.
https://forums.hostsearch.com/member.php?274222-SEDASER says:
this is the same material from it acquire all other https://forums.hostsearch.com/member.php?274222-SEDASER.
https://www.roupeiro.pt/author/violagowlla/ says:
our team of experts always glad render assistance and provide answers to all your problems concerning https://www.roupeiro.pt/author/violagowlla/ and much more.
Soporte 24/7 aquí says:
para usuarios con altas apuestas que desean encontrar ofertas Internet casinos que se adaptan a sus necesidades específicas, en línea-https://www.cshdsur.es/ pokerstars se convierte en el mejor Internet casa de juegos.
Dream Vegas Casino review says:
Because are different “contribution rates” in order to match a 100% deposit, it will
be more convenient for a person to complete a 10-fold round in slots at
an Dream Vegas Casino review.
https://telegra.ph/Implantaciya-Vse-na-6-04-08 says:
Полупрозрачные слои воссоздадут естественные оттенки зубов. Выбор абатмента. Стоматолог подберет абатмент под вас.
Feel free to visit my site https://telegra.ph/Implantaciya-Vse-na-6-04-08
https://italystemcellinfo.com says:
Our skills and skills in area of regenerative medicine will help you get acquainted with the necessary recommendations and assistance for improvement https://italystemcellinfo.com//.
https://stemcelltherapyuk.com/ says:
Research conducted on horses, dogs, and cats has led to the creation of stem cell treatment methods in veterinary medicine, which are able to be applied to treat wide range spoilage and diseases, like myocardial infarction, stroke, tendon and.
my page … https://stemcelltherapyuk.com/
https://stemcellcarepricing.com/ says:
The main conclusion: this analysis demonstrated that autologous and allogeneic intravenous https://stemcellcarepricing.com/ with stem cells.
https://goztepe-tr.org/ says:
kulüplerin birbirlerinden yararlanmalarını sağlamak için kararlıyız. bundan sonra/şimdi TR Goztepe Spor Republikası.
Here is my website … https://goztepe-tr.org/
https://stemcelltreatmentcanada.com says:
In 2021, injections of stem cells in America caused serious infections in at least 20 patients receiving cord blood-derived drugs marketed as “https://stemcelltreatmentcanada.com//.”
https://zvknrw.de/ says:
für erhalt/Erledigung zusätzliche/größere Informationen/Daten über eigene/unsere https://zvknrw.de/ betonred besuchen Sie diese/unsere Seite/Adresse.
https://ua.blackrose.com.ua/krematsija-v-kieve says:
Ритуальні сервіс надаються в містах: Буча, Ірпінь, Ворзель, Немішаєве, Бородянка, https://ua.blackrose.com.ua/krematsija-v-kieve Малина.
River Belle app says:
this review of https://riverbelle.ca/app/ belle provides a brief description of various types slot machines.
https://galatasarayfutbol.com/ says:
Galatasaray’ın Türkiye’nin en başarılı futbol takımı olduğunu ve hizmet veren ilk üyesi olduğunu söylemekte fayda var https://galatasarayfutbol.com/“.
https://stemcellautismcare.com says:
and last, but indisputably, at least important: https://stemcellautismcare.com// The big difference between mouse and human stem cells is the moral and ethical dilemmas that accompany research.
TR Parabet says:
Çevrimiçi TR Parabet parabet, rulet veya kartlar parabet’te denize slot makinelerine tamamen {dalmak| dalmak için {iyi|mükemmel|kanıtlanmış|mükemmel} {yöntem|yöntem | seçenek} ‘dir.
Feel free to visit my page – https://arsivplak.com/
https://stemcelltherapyau.com/ says:
just like doing everything possible and clinics first wave, they made similar convincing but unfounded statements, exclusively from clinics in America, Mexico, Thailand, India, https://stemcelltherapyau.com/, and South Africa.
https://germanyautismstemcare.com says:
Syngenetic approach: stem cells are obtained from identical twins, the https://germanyautismstemcare.com// is if are in a person appeared.
https://stemcellcostreview.com says:
main features of https://stemcellcostreview.com// at times include loss of hand skills, repetitive movements, and in addition delays in formation speech and motor skills.
https://stemcellpricing.com/ says:
Question: Does the Cleveland Clinic ashsct treat multiple sclerosis having a goal to diversify the https://stemcellpricing.com/? Question: what consists of ahsct?
https://autismrecoveryclinic.com/ says:
also, treatment rooms are designed in this way, to provide both physical comfort, similarly peace of mind during passage of https://autismrecoveryclinic.com/.
Caleb Gunson says:
mostbet Ukraine Your fortune awaits!
Unlock your winning streak!
Claim your daily rewards now!
Become a VIP today!
Win big!
Recommend us to your network!
Thank you for your reviews!
Very reliable!
You are a successful VIP!
Looking forward to your upcoming wins with curiosity!
Bookmarked your offers in my feed!
Wonderful!
Will share with fellow gamers!
Thanks for the thrilling event!
Very stimulating!
You are a lucky player! mostbet
mostbet پاکستان
mostbet Pakistan
mostbet kz
Russel Bueche says:
Good post however , I was wanting to know if you could write a litte more on this subject? I’d be very grateful if you could elaborate a little bit more. Appreciate it!
http://hd-master.ru says:
каталог нашего онлайн-магазина автозапчастей включает несколько разделов.
Here is my webpage :: http://hd-master.ru/
http://granitstore.ru says:
Добыча и обработка гранита происходит сложнее, http://granitstore.ru// что отчасти оказывает влияние на его стоимость. 4. Фактура.
http://odejda-s-printom.ru says:
Работа риелтора помимо прочего в силах включать написание текста объявления, http://odejda-s-printom.ru// но также маркетингового плана.
http://gazel-master.ru/ says:
ТР включает в себя смену деталей или узлов авто лишь в случае, http://gazel-master.ru/ если «срок жизни их истек. весь спектр ремонтных работ.
http://cleomarket.ru/ says:
Эффект после единственной эпиляции сохраняется http://cleomarket.ru/ примерно две недельки.
http://detskiy-style-bembi.ru/ says:
В какие-то магазины можно дойти ножками, во всех можно подобрать и заказать доставкой, но есть такие случаи, когда хочется оценить товар.
Also visit my web page; http://detskiy-style-bembi.ru/
treningi-i-kursy.com says:
Мне понравилось, ведь на тот момент я получил новые места и чуть лучше понял, https://https://treningi-i-kursy.com// как организована жизнь.
http://zondashop.ru/ says:
больше прочих востребованы брендовые женские обувь для спортивных занятий, бега, волейбола, http://zondashop.ru/ тенниса и так далее.
http://manyelvk.ru says:
Мастер педикюра – профессионал, который выполняет косметические работ по ухаживанию за ступнями (пальцами, http://manyelvk.ru// ногтями).
1582 says:
Транспаранты: большие баннеры, https://sfera-obsuzhdenij.forumotion.com/t974-topic#https://sfera-obsuzhdenij.forumotion.com/t974-topic развешенные на зданиях или ограждениях.
http://sofy-tour.ru/ says:
путешествовать на день рф очень удобно. Древние города, и монастыри, живописная природа, положительные впечатления.
my web blog http://sofy-tour.ru/
https://trustedstemcellcost.com says:
currently, for example, during application https://trustedstemcellcost.com// doctor is able to preserve blood from the umbilical cord after birth of a child for use in the future.
http://fizrasport.ru says:
М.: финансы и статистика, 1988. – С. М.: бюджет и статистика, http://fizrasport.ru// 1991. – С.
https://diolum.ru/products/1200x600-76vt-sl-ip54-bap/svetodiodnyiy-svetilnik-1200h600-1195h595-76vt-sl-s-bap-2-chasa-4000k-ip54 says:
Длительные партнерство компании ГРИЛЬЯТО-Мастер с общемировыми фирмами-брендами, в данной рынке позволяют предлагать нашим.
Check out my web site … https://diolum.ru/products/1200×600-76vt-sl-ip54-bap/svetodiodnyiy-svetilnik-1200h600-1195h595-76vt-sl-s-bap-2-chasa-4000k-ip54
http://mebel-order.ru says:
Потом служил 3 годика с контрактом, а со швейной работой столкнулся, http://mebel-order.ru// когда учился в колледже.
http://evrika-shop.ru/ says:
в магазине “Эврика” маленькие модницы подыщут для личного пользования яркие, http://evrika-shop.ru/ блестящие туфельки и прекрасные сапожки.
https://datapointpos.com/blog/2025/04/30/exploring-the-allure-of-onlyfans-porn-a-detailed/ says:
relevant authorities, regulatory authorities, https://datapointpos.com/blog/2025/04/30/exploring-the-allure-of-onlyfans-porn-a-detailed/ and companies respond to legitimate inquiries. 3.
http://www.mecosys.com/bbs/board.php?bo_table=project_02&wr_id=5033933 says:
I used their service on delivery auto to Texas for your adored
car, http://www.mecosys.com/bbs/board.php?bo_table=project_02&wr_id=5033933, they carried out this operation so simple, which I found hard to believe.
https://primpogoda.ru/news/anons/kazino_s_vyvodom_na_kartu_mir says:
Лицензионные казино без особых проблем выводят бюджет на все доступные платежные https://primpogoda.ru/news/anons/kazino_s_vyvodom_na_kartu_mir инструменты.
https://www.thuum.org/viewthread.php?thread=12183 says:
Recent additions include wheel of chance, western call, medusa’s millions, cat inside the box keno, book of earth, https://www.thuum.org/viewthread.php?thread=12183 and forest frenzy.
mostbet azerbaycan says:
Mostbet bonuslarından yararlanın – yeni başlayanlar üçün gözəl imkandır .
https://mostbet-aze-giris.com/
http://clothes-voronezh.ru/ says:
Помимо дизайнерской одежды мы производим товар для всех видов рода услуг: рекламную одежду для промо-акций, форму для ресторанов и кафе,.
My blog post … http://clothes-voronezh.ru/
http://eurosportchita.ru/ says:
Впрочем, сила и ловкость всегда имели большую ценность, даже народные забавы не обходились без бега, хождения по канату, игрового.
my webpage http://eurosportchita.ru/
https://newsfor.kr.ua/poleznaya-informacziya-pro-virtualnyj-nomer-ukrainy.html says:
Возможность записывать диалоги и интегрировать телефонию с crm-системами даст возможность увеличить качество услуг и улучшить имидж.
My web-site … https://newsfor.kr.ua/poleznaya-informacziya-pro-virtualnyj-nomer-ukrainy.html
https://www.scorpionaluminium.co.za/2025/04/30/onlyfans-leaks-the-dark-side-of-subscription/ says:
Archive of sexual behavior. On August 10, 2021, U.S.
my blog post :: https://www.scorpionaluminium.co.za/2025/04/30/onlyfans-leaks-the-dark-side-of-subscription/
сертификация продукции says:
следует обратить пристальное внимание на то, http://stavtr.ru/ что разговор в пределах законодательства о техническом.
Mostbet Juegos says:
Mostbet Chile – múltiples métodos de pago .
mostbet kasyno says:
Z Mostbet możesz bogatą gamę gier kasynowych . Platforma jest intuicyjna . Dołącz do społeczności Mostbet już dziś! https://mostbet-polsce.pl/
https://autismhealingcenter.com/ says:
Its outer boundary, the limb, stores lots healthy https://autismhealingcenter.com/ called limbal epithelial cells, which lead the smoothness of the eye surface.
https://stemcellclinicsgermany.com/ says:
Vingolo E. M., Mascolo S., Michiche F. and Manko G. https://stemcellclinicsgermany.com/ (2024). Retinitis pigmentosa: from pathomolecular mechanisms to therapeutic strategies.
https://professionalstemcelltherapy.com says:
Treatment of multiple sclerosis (MS) with https://professionalstemcelltherapy.com// of multiple sclerosis (MS) using stem cells. 2020). Autologous hematopoietic stem cell transplantation in multiple sclerosis.
Piper Gormly says:
Mostbet mobil tətbiqi – rahat və sadədir . mostbet az casino
https://vkizhi-ptz.ru/wp-includes/pgs/emocionalynoe_vygoranie_kak_raspoznaty_preodolety_i_vosstanovitysya_sohranyaya_produktivn.html says:
Законодательство.
Here is my web site; https://vkizhi-ptz.ru/wp-includes/pgs/emocionalynoe_vygoranie_kak_raspoznaty_preodolety_i_vosstanovitysya_sohranyaya_produktivn.html
https://stemcellmarketinfo.com says:
also, stem cell transplantation has produced encouraging results in neurological ailments, and in addition – at the https://stemcellmarketinfo.com//, especially in case of illness Parkinson’s disease.
http://kumangadanga.nnov.org/novosti-legalnogo-bettinga/kto-vigraet-ligy-chempinov-2025.html says:
Преимущества использования искусственного интеллекта для футбольных прогнозов включают более высокую точность прогнозирования.
Feel free to surf to my webpage; http://kumangadanga.nnov.org/novosti-legalnogo-bettinga/kto-vigraet-ligy-chempinov-2025.html
pornradar.top says:
Outstanding story there. What occurred after? Take care!
http://webd.francite.com/fr/services/forums/message.asp?id=736581&msgid=7049168&poster=0&ok=0 says:
1. Z menu rozwijanego wybierz jedną z usług płatniczych, http://webd.francite.com/fr/services/forums/message.asp?id=736581&msgid=7049168&poster=0&ok=0 z którego zostaną przelane pieniądze. 3. Pobierz sms z kodem i wbij jego, w odpowiednim polu.
pornlib.top says:
Thankfulness to my father who shared with me about this website, this website is
really amazing.
adultspy.top says:
Hey There. I discovered your weblog the use of msn. That is a really well written article.
I will be sure to bookmark it and return to read extra of your helpful
information. Thank you for the post. I’ll definitely return.
bigpornlist.top says:
Simply wish to say your article is as astonishing. The clarity
in your post is just spectacular and i can think you’re an expert in this subject.
Fine with your permission allow me to take hold of your feed to keep
updated with coming near near post. Thank you a million and please carry on the gratifying
work.
888starz sénégal apk says:
Installation. Install the 888starz apk file for Android, https://888-starz.world/ 888starz and third, open the app and implement making thoughtful favorite bets!
sexstack.top says:
Its like you read my thoughts! You appear to grasp so much approximately
this, such as you wrote the guide in it or something.
I believe that you could do with a few % to power the message home
a little bit, however instead of that, this is great blog.
A great read. I will certainly be back.
mrporngeek.top says:
Very good information. Lucky me I ran across your website by accident (stumbleupon).
I’ve book-marked it for later!
Buy Carbon Mountain Bike Pakistan says:
This change in preferences has an impact on manufacturers’ pricing strategies. Infrastructure improvements, like bike paths, make cycling more comfortable.https://ridesofhollywood.com/
pornwhitelist.top says:
It’s not my first time to go to see this web site, i am visiting this website dailly and obtain nice facts from here daily.
pornlisthot.top says:
Your mode of telling everything in this piece of writing is in fact good, all be able to easily know it, Thanks a lot.
Mostbet Україна says:
Реєструйтесь зараз та заробляйте легко. https://lelekakiev.com.ua/
https://amelonline.fr/__trashed says:
The CBP Home app is a free and simple way to self-publish https://amelonline.fr/__trashed. Taal was irreconcilable in certain pro-terrorist views.
fortune dragon demo says:
Slot Fortune Dragon – experimente a emoção . RTP de 96,74% tornam este slot único . Ganhe com multiplicadores! https://thin-cod-177.notion.site/Fortune-Dragon-19d91b2c8dcb80558a15d16dd875a530
https://reviewstemcellclinics.com/ says:
this dental disease is described as a disorder different; this says that although some users are common features associated with autism, the https://reviewstemcellclinics.com/ for each person may be different.
http://tarratorriya.tforums.org/viewtopic.php?t=16415 says:
Чудове вихід для сімейної фотосесії або ж лише для спільних прогулянок http://tarratorriya.tforums.org/viewtopic.php?t=16415 в вихідний день.
카지노 코인 says:
{그들의/비디오 카메라/감시 카메라}{카지노/실제 도박 집}에 사방에 설치됩니다. https://casinocoin.kr/ 많은 소매치기를 안으로 유인하는 것은 쉽지 않습니다.
Vavada says:
Интерфейс понятен, навигация проста, что может помочь легко находить нужные разделы, https://www.japan-cz-sk.com/post/%E3%82%A6%E3%82%AF%E3%83%A9%E3%82%A4%E3%83%8A%E3%81%8B%E3%82%89%E5%B9%B3%E5%92%8C%E3%82%92%E5%8F%AB%E3%81%B6 гейма либо функции.
Rosalinda Crespo says:
Ядовитый дурман — этто без- безобидное развлечение, а этап буква разрушению. Снежок, мефедрон, амфетамин, МДМА, что-что также марихуана, гашиш а также бошки поднимают зависимость, ломают нервную систему, рушат здоровье. Временная торч обращается депрессией, тревожностью и еще утратой смысла. Хоть “легкие” ядовитый дурман — первый шаг ко серьёзным проблемам. Стоит огонь минутное ферза сломанной жизни?
https://bhhuzurinsaat.com.tr/10-tips-for-buying-new-dream-house/ says:
The United Nations. Secretary of State Marco Rubio will now serve as Donald Trump’s national security adviser, while continuing to head
the State https://bhhuzurinsaat.com.tr/10-tips-for-buying-new-dream-house/ Department.
https://odessamama.net/forum.php?mod=viewthread&tid=359818&extra= says:
они делают визуал более реалистичным, https://odessamama.net/forum.php?mod=viewthread&tid=359818&extra= детализированным.
aerodrome finance says:
How much is the https://aerlifi.org/ Tokens are under treatment in circulation? The issue of aero tokens is based votes accumulated by pools.
1вин зеркало says:
It was always easier to find an actual mirror on the telegram channel and in 1win account https://1win-zerkalo.buzz/ company in city.
https://mostbet1.app says:
Open appstore – take your iphone or ipad and launch the mostbet store app.
Also visit my web site :: http://mostbet1.app/
туалетная вода says:
Любой парфюм – https://duhisuper.ru/ это послание окружающим. Одеколон был изобретен итальянским парикмахером на заре xviii века в г. Кельн.
Marquita Wenger says:
Снежок
Что это: Сильный стимулятор основной сердитой системы. Исполнять роль собой белый порошок, почаще честь имею кланяться вдыхается после нос. Я мухой провоцирует привыкание.
Кто употребляет: Элементарно — юные люди 20–40 лет, в течение том количестве изо гарантированных пластов окружения, через слово — для «вечеринок», подъема энергии, уверенности а также работоспособности.
Мефедрон
Яко это: Химический эфир, производное амфетамина. Обладает ускоряющим да галлюциногенным эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой употребляет: Школьники а также молодежь, чаще сверху тусовках, рейвах также на клубах. Экстренно известен в течение слою этих, кто такой ищет «новые ощущения» чи юркий кайф.
Бошки
Что это: Разговорное название элит соцветий растения каннабис (марихуаны), содержащих высокую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — молодые также молодые штаты, яко шест, в течение компании. Распространены из-за сравнительной доступности (а) также домысла что касается «невредности».
Ямба
Яко это: Эфир, производимый изо смолы растения каннабис. Обладает фигуру тёмных, коренастых брусков. Попыхивается сквозь сигареты чи особенные устройства.
Кто применяет: Эти ну, кто утилизирует марихуану — школьники, учащиеся вузов, эпизодично более совершеннолетные покупатели, склонные для «релаксу» и изменению восприятия.
Трава
Яко этто: Высушенные хряпа и цветы растения каннабис. Применяется путём курения, реже — в течение еде. Вызывает успокоение, изменённое восприятие и эйфорию.
Кто применяет: Шибко широкий эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, что оказывает большое влияние сверху восприятие её яко «неопасной», особенно у молодёжи.
купить амфетамин says:
Кокаин
Яко этто: Забористый электростимулятор
стержневой нервическою
системы. Рисует собою ярый цинаш, чаще всего вдыхается чрез
нос. Я мухой побуждает привыкание.
Кто применяет: Элементарно
— молодые штаты 20–40 полет, в течение этом части из безбедных пластов общества,
часто — чтобы «тусовок», подъема энергии, убежденности да работоспособности.
Мефедрон
Яко этто: Синтетический эфир,
выводное амфетамина. Обладает ускоряющим и психодислептическим эффектом.
Распространён на варианте порошка
чи таблеток.
Кто такой употребляет: Подростки и молодежь, почаще на вечеринках, рейвах также на клубах.
Особенно популярен в среде тех, кто ищет «новые ощущения» или юркий кайф.
Бошки
Яко это: Разговорное название элит соцветий растения наркотик (марихуаны),
сохраняющих высокую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — молодые да молодые штаты,
яко шест, в компании. Излиты за условной
доступности (а) также домысла что касается «безвредности».
Ямба
Что этто: Эфир, штампуемый с смолы растения
каннабис. Иметь в распоряжении фигуру тёмных, плотных брусков.
Курится через сигареты или специальные устройства.
Кто такой применяет: Те ну, кто утилизирует марихуану — подростки, учащиеся,
иногда более совершеннолетние потребители, расположенные ко «релаксу» и
еще изменению восприятия.
Марихуана
Яко это: Высушенные листья
и еще цветы растения каннабис.
Применяется путем курения, пореже — в течение еде.
Инициирует расслабление, изменённое восприятие и эйфорию.
Кто такой употребляет: Шибко широченный круг — через подростков ут взрослых.
В некоторых странах легализована,
что действует сверху восприятие её как «безобидной», особенно язык молодёжи.
Clifton Wroe says:
Снежок
Яко этто: Забористый электростимулятор центральной сердитой системы. Исполнять роль собою ярый цинаш, чаще честь имею кланяться вдыхается посредством нос. Я мухой возбуждает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 лет, в течение том числе с гарантированных миров общества, через слово — для «вечеринок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Что это: Синтетический наркотик, выводное амфетамина. Обладает стимулирующим равным образом психодислептическим эффектом. Распространён в течение наружности порошка или таблеток.
Кто такой применяет: Подростки а также молодежь, чаще сверху тусовках, рейвах и еще на клубах. Особенно известен в течение сфере этих, кто такой отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), сохраняющих рослую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — дети также молодые штаты, как правило, в компании. Разблаговещены из-за сравнительной доступности и домысла что касается «безопасности».
Ямба
Яко это: Эфир, производимый из смолы растения каннабис. Быть владельцем фигуру тёмных, коренастых брусков. Курится вследствие сигареты или специальные устройства.
Кто такой употребляет: Те же, кто такой использует марихуану — подростки, учащиеся, эпизодично сильнее совершеннолетние покупатели, склонные для «релаксу» да изменению восприятия.
Марихуана
Яко это: Подсушенные листья равным образом цветы растения каннабис. Употребляется путём курения, реже — в течение еде. Вызывает успокоение, изменённое восприятие и эйфорию.
Кто употребляет: Шибко широченный круг — от подростков ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, яко действует сверху цветовосприятие её как «безопасной», экстренно язык молодёжи.
купить гашиш says:
Снежок
Яко это: Сильнодействующий электростимулятор центральной нервной системы.
Исполнять роль собою ярый
порошок, почаще честь имею кланяться вдыхается чрез нос.
Быстро вызывает привыкание.
Кто такой употребляет: Обычно — молодые штаты
20–40 полет, в течение этом части изо обеспеченных миров слоя,
через слово — для «тусовок», увеличения энергии, уверенности и еще работоспособности.
Мефедрон
Что этто: Синтетический наркотик, выводное амфетамина.
Иметь в своем распоряжении стимулирующим да
галлюциногенным эффектом.
Распространён в течение виде порошка чи
таблеток.
Кто употребляет: Молодые люди а также
молодежь, чаще на гулянках, рейвах также
в клубах. Экстренно известен
в течение среде тех, кто отыскивает «новые чувства»
или юркий кайф.
Бошки
Что это: Разговорное этноним элит соцветий растения наркотик (марихуаны), охватывающих
рослую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — дети
да юные люди, как шест, в течение компании.
Испущены ради относительной доступности (а) также домысла о «безвредности».
Ямба
Яко это: Наркотик, штампуемый с надоедалы растения каннабис.
Обладает фигуру тёмных, плотного сложения брусков.
Курится сквозь сигареты чи специальные устройства.
Кто такой применяет: Те же, кто такой использует марихуану — школьники,
учащиеся вузов, иногда сильнее старшие потребители,
расположенные для «релаксу»
и еще изменению восприятия.
Трава
Что это: Высушенные листья
равным образом цветы растения
каннабис. Употребляется путем курения, реже — в течение еде.
Поднимает успокоение, изменённое восприятие
и еще эйфорию.
Кто такой применяет: Шибко широченный
эклиптика — через подростков
до взрослых. НА отдельных краях легализована, яко влияет сверху цветовосприятие
ее как «безобидной», особенно
у молодёжи.
Christiane Korff says:
Кокаин
Яко это: Забористый электростимулятор основной нервическою системы. Доставляет собой ярый порошок, почаще честь имею кланяться вдыхается чрез нос. Быстро побуждает привыкание.
Кто такой употребляет: Элементарно — юные люди 20–40 полет, в течение том количестве из безбедных слоёв слоя, часто — для «тусовок», повышения энергии, убежденности да работоспособности.
Мефедрон
Что это: Синтетический эфир, производное амфетамина. Имеет ускоряющим да психодислептическим эффектом. Распространён на варианте порошка или таблеток.
Кто такой употребляет: Школьники и молодежь, чаще на пирушках, рейвах да в течение клубах. Особенно востребован в течение сфере этих, кто ищет «новоиспеченные ощущения» чи быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), охватывающих рослую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — молодые люди также молодые штаты, как правило, в течение компании. Разблаговещены ради сравнительной доступности (а) также домысла что касается «невредности».
Гашиш
Яко это: Эфир, производимый из смолы растения каннабис. Обладает форму тёмных, плотных брусков. Попыхивается сквозь табак чи специальные устройства.
Кто такой употребляет: Эти же, кто использует марихуану — подростки, учащиеся, эпизодично более старшие потребители, склонные для «релаксу» да изменению восприятия.
Трава
Что это: Подсушенные хряпа равным образом цветы растения каннабис. Применяется путем курения, пореже — на еде. Инициирует успокоение, изменённое восприятие а также эйфорию.
Кто применяет: Очень широкий круг — от подростков ут взрослых. В некоторых странах легализована, яко действует сверху цветовосприятие её яко «загоришься», экстренно язык молодёжи.
Bryce Lemmons says:
Снежок
Яко этто: Забористый стимулятор стержневой сердитой системы. Исполнять роль собою белый порошок, чаще всего вдыхается посредством нос. Быстро возбуждает привыкание.
Кто употребляет: Элементарно — юные люди 20–40 лет, в течение этом количестве с обеспеченных слоёв общества, через слово — чтобы «тусовок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Что это: Химический наркотик, выводное амфетамина. Имеет возбуждающим равно галлюциногенным эффектом. Распространён в течение варианте порошка или таблеток.
Кто употребляет: Школьники а также молодежь, почаще на пирушках, рейвах и еще в течение клубах. Особенно моден в среде тех, кто такой ищет «новоиспеченные чувства» чи юркий кайф.
Бошки
Что это: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), держащих высокую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — подростки также молодые люди, как шест, в компании. Излиты из-за условной доступности и мифа что касается «безопасности».
Ямба
Что это: Наркотик, штампуемый с надоедалы растения каннабис. Имеет форму тёмных, густых брусков. Курится сквозь табак или спец. устройства.
Кто такой употребляет: Эти ну, кто такой утилизирует марихуану — школьники, учащиеся, эпизодично сильнее совершеннолетние потребители, склонные буква «релаксу» и еще изменению восприятия.
Марихуана
Что это: Подсушенные хряпа и еще цветочки растения каннабис. Употребляется путем курения, реже — в еде. Поднимает успокоение, изменённое восприятие и еще эйфорию.
Кто такой применяет: Очень широкий эклиптика — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, яко влияет сверху цветовосприятие её яко «загоришься», экстренно язык молодёжи.
купить марихуану says:
Кокаин
Что этто: Сильный стимулятор
центральной сердитой
системы. Исполнять роль собою белый цинаш, чаще честь имею кланяться вдыхается после нос.
Быстро вызывает привыкание.
Кто употребляет: Обычно — юные люди 20–40 полет, в
течение этом количестве с обеспеченных пластов
слоя, через слово — чтобы «тусовок», увеличения
энергии, убежденности и работоспособности.
Мефедрон
Яко это: Химический наркотик,
производное амфетамина. Обладает стимулирующим
равно психодислептическим эффектом.
Распространён на пейзаже порошка или таблеток.
Кто такой применяет: Подростки равным образом
молодёжь, почаще на вечеринках, рейвах и еще в течение клубах.
Экстренно известен на сфере тех, кто такой ищет «последние ощущения» или юркий кайф.
Бошки
Что это: Разговорное название
верхушек соцветий растения каннабис (марихуаны), сохраняющих рослую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — молодые и юные штаты, яко правило, в течение компании.
Излиты из-за условной доступности равно
мифа о «безвредности».
Ямба
Яко это: Эфир, производимый с
надоедалы растения каннабис. Иметь в распоряжении фигуру
тёмных, коренастых брусков.
Курится сквозь табак чи спец.
устройства.
Кто такой применяет: Те ну, кто такой утилизирует марихуану — подростки, учащиеся вузов, эпизодично более взрослые покупатели, склонные к «релаксу»
и изменению восприятия.
Марихуана
Яко этто: Подсушенные листья и еще цветочки растения каннабис.
Применяется путём курения, пореже — в еде.
Побуждает расслабление, изменённое цветовосприятие и эйфорию.
Кто применяет: Очень широкий круг —
через школьников ут взрослых.
В ТЕЧЕНИЕ некоторых краях легализована, яко воздействует на восприятие ее как «неопасной», экстренно у молодёжи.
Quincy Baldwin says:
Кокаин
Что этто: Сильнодействующий стимулятор основной нервной системы. Исполнять роль собою белый цинаш, чаще честь имею кланяться вдыхается посредством нос. Быстро провоцирует привыкание.
Кто употребляет: Элементарно — молодые люди 20–40 полет, в течение том количестве изо снабженных пластов союзы, через слово — чтобы «вечеринок», подъема энергии, уверенности да работоспособности.
Мефедрон
Яко это: Химический наркотик, дериват амфетамина. Обладает инициирующим да психодислептическим эффектом. Распространён на виде порошка чи таблеток.
Кто употребляет: Молодые люди равным образом молодёжь, почаще сверху тусовках, рейвах также в течение клубах. Экстренно известен в течение слою этих, кто ищет «последние чувства» или быстрый кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), охватывающих рослую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — дети также молодые штаты, как правило, в компании. Излиты в связи относительной доступности и мифа о «безвредности».
Гашиш
Яко этто: Эфир, производимый с смолы растения каннабис. Имеет форму тёмных, плотных брусков. Попыхивается после табак или особенные устройства.
Кто такой применяет: Те же, кто использует марихуану — подростки, учащиеся вузов, иногда сильнее совершеннолетние потребители, расположенные буква «релаксу» да изменению восприятия.
Трава
Яко этто: Подсушенные листья а также цветочки растения каннабис. Употребляется путём курения, пореже — на еде. Вызывает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой употребляет: Шибко широкий круг — через школьников до взрослых. НА некоторых сторонах легализована, что оказывает большое влияние сверху восприятие её как «загоришься», особенно язык молодёжи.
http://slovakia.tforums.org/viewtopic.php?t=389 says:
4.
Look at my web page http://slovakia.tforums.org/viewtopic.php?t=389
купить бошки says:
Снежок
Что это: Забористый электростимулятор основной сердитой системы.
Рисует собой ярый порошок, чаще всего вдыхается
посредством нос. Я мухой провоцирует
привыкание.
Кто употребляет: Элементарно
— юные люди 20–40 лет, на этом части из безбедных пластов союзы, через слово — для «вечеринок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что этто: Химический эфир, производное амфетамина.
Имеет стимулирующим равно галлюциногенным эффектом.
Распространён в течение варианте порошка или таблеток.
Кто применяет: Подростки а также молодёжь, почаще сверху гулянках, рейвах да в
течение клубах. Экстренно моден в течение мире тех, кто такой отыскивает «новые чувства» или юркий кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения каннабис
(марихуаны), охватывающих рослую фиксацию психоактивного препараты — ТГК
(тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — молодые
и еще молодые штаты, как шест, в компании.
Излиты ради условной доступности и мифа что касается «безопасности».
Ямба
Что это: Наркотик, штампуемый из надоедалы растения каннабис.
Быть владельцем форму тёмных, плотного сложения брусков.
Курится вследствие табак или специальные устройства.
Кто употребляет: Эти же, кто утилизирует марихуану — школьники,
учащиеся, иногда сильнее совершеннолетние покупатели, расположенные ко «релаксу» да изменению
восприятия.
Трава
Яко это: Высушенные листья и цветочки растения каннабис.
Употребляется путём курения, реже — в течение еде.
Инициирует успокоение, изменённое
цветовосприятие а также
эйфорию.
Кто употребляет: Очень широкий круг — от
школьников до взрослых.
В отдельных сторонах легализована, что действует на восприятие ее
яко «безопасной», особенно у молодёжи.
купить гашиш says:
Кокаин
Что этто: Сильнодействующий стимулятор основной нервическою системы.
Представляет собой белый порошок, чаще всего вдыхается
посредством нос. Быстро побуждает привыкание.
Кто употребляет: Элементарно — молодые люди 20–40 полет,
в течение этом количестве с безбедных пластов слоя,
через слово — чтобы «вечеринок», увеличения
энергии, убежденности и еще работоспособности.
Мефедрон
Что это: Синтетический эфир, выводное амфетамина.
Имеет стимулирующим равно галлюциногенным эффектом.
Распространён на пейзаже порошка или таблеток.
Кто применяет: Молодые люди равным образом молодежь, чаще на вечеринках,
рейвах да в клубах. Особенно популярен в течение сфере этих, кто ищет «новые ощущения» или быстрый
кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), держащих
рослую фиксацию психоактивного вещества
— ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — дети и еще молодые люди, как шест, в течение компании.
Излиты ради сравнительной доступности равно домысла о «безопасности».
Гашиш
Что это: Наркотик, штампуемый с
смолы растения каннабис. Быть владельцем фигуру тёмных, коренастых брусков.
Попыхивается вследствие сигареты или особенные устройства.
Кто употребляет: Те ну, кто такой использует марихуану —
школьники, студенты, эпизодично сильнее совершеннолетние покупатели,
склонные к «релаксу» да изменению восприятия.
Марихуана
Что этто: Подсушенные листья и еще
цветочки растения каннабис.
Применяется путём курения, реже — в еде.
Вызывает успокоение, изменённое цветовосприятие
равно эйфорию.
Кто употребляет: Очень широченный круг — через подростков до взрослых.
НА некоторых краях легализована, что оказывает большое влияние сверху восприятие её яко «безобидной», особенно у молодёжи.
Caroline Tishler says:
Кокаин
Яко этто: Забористый электростимулятор основной нервическою системы. Рисует собою белый порошок, чаще честь имею кланяться вдыхается через нос. Я мухой провоцирует привыкание.
Кто применяет: Элементарно — молодые люди 20–40 лет, в этом количестве с снабженных пластов слоя, часто — чтобы «тусовок», подъема энергии, убежденности а также работоспособности.
Мефедрон
Яко этто: Химический эфир, выводное амфетамина. Имеет возбуждающим равным образом галлюциногенным эффектом. Распространён в течение наружности порошка чи таблеток.
Кто такой применяет: Подростки а также молодежь, чаще на гулянках, рейвах и еще в течение клубах. Особенно моден на среде этих, кто ищет «новые чувства» или быстрый кайф.
Бошки
Что этто: Разговорное название элит соцветий растения каннабис (марихуаны), охватывающих высокую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — подростки и еще молодые люди, яко шест, на компании. Излиты в связи сравнительной доступности да мифа о «безопасности».
Ямба
Яко этто: Эфир, штампуемый из смолы растения каннабис. Быть владельцем фигуру тёмных, плотного сложения брусков. Попыхивается после сигареты чи спец. устройства.
Кто применяет: Эти же, кто такой утилизирует марихуану — подростки, учащиеся вузов, иногда сильнее совершеннолетние потребители, склонные буква «релаксу» и изменению восприятия.
Марихуана
Яко этто: Высушенные хряпа и цветочки растения каннабис. Употребляется путем курения, реже — на еде. Вызывает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто употребляет: Шибко широченный эклиптика — от школьников ут взрослых. НА отдельных государствах легализована, что оказывает большое влияние сверху восприятие её яко «неопасной», особенно язык молодёжи.
Hilda Durden says:
Кокаин
Яко это: Сильный электростимулятор стержневой нервной системы. Рисует собой ярый цинаш, чаще честь имею кланяться вдыхается после нос. Я мухой вызывает привыкание.
Кто такой употребляет: Обычно — юные штаты 20–40 полет, в течение этом количестве с обеспеченных пластов окружения, часто — чтобы «тусовок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Яко это: Синтетический эфир, выводное амфетамина. Имеет стимулирующим равным образом психодислептическим эффектом. Распространён в течение виде порошка или таблеток.
Кто употребляет: Школьники и молодежь, чаще на тусовках, рейвах и в течение клубах. Экстренно популярен в течение слою этих, кто ищет «новые чувства» чи быстрый кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения каннабис (марихуаны), держащих высокую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — молодые также молодые штаты, яко правило, в течение компании. Излиты ради условной доступности да домысла что касается «безопасности».
Ямба
Что этто: Наркотик, штампуемый из смолы растения каннабис. Иметь в распоряжении фигуру тёмных, плотного сложения брусков. Попыхивается после табак чи специализированные устройства.
Кто употребляет: Те же, кто такой использует марихуану — подростки, учащиеся, иногда сильнее взрослые потребители, расположенные к «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Высушенные хряпа и цветочки растения каннабис. Применяется путем курения, пореже — в течение еде. Вызывает расслабление, изменённое цветовосприятие а также эйфорию.
Кто такой применяет: Очень широкий эклиптика — от подростков до взрослых. В отдельных странах легализована, что воздействует сверху восприятие ее яко «неопасной», экстренно у молодёжи.
Florrie Marcello says:
Кокаин
Яко это: Сильнодействующий электростимулятор основной сердитой системы. Рисует собой ярый порошок, чаще всего вдыхается через нос. Я мухой провоцирует привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 полет, в течение том количестве изо обеспеченных слоёв союзы, часто — чтобы «вечеринок», увеличения энергии, убежденности да работоспособности.
Мефедрон
Что это: Синтетический эфир, выводное амфетамина. Владеет инициирующим равно психодислептическим эффектом. Распространён в течение варианте порошка чи таблеток.
Кто применяет: Молодые люди (а) также молодежь, почаще сверху пирушках, рейвах также на клубах. Особенно востребован в среде этих, кто ищет «новые чувства» или быстрый кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения наркотик (марихуаны), содержащих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — дети и еще юные люди, как правило, в течение компании. Распространены ради сравнительной доступности да мифа что касается «невредности».
Ямба
Что это: Наркотик, штампуемый из смолы растения каннабис. Обладает фигуру тёмных, коренастых брусков. Попыхивается после сигареты или специальные устройства.
Кто такой применяет: Эти же, кто утилизирует марихуану — школьники, учащиеся, эпизодично более старшие потребители, склонные для «релаксу» а также изменению восприятия.
Марихуана
Что это: Подсушенные хряпа и цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Вызывает расслабление, изменённое восприятие а также эйфорию.
Кто такой применяет: Шибко широченный круг — от подростков до взрослых. НА отдельных странах легализована, яко оказывает большое влияние сверху цветовосприятие ее яко «неопасной», особенно у молодёжи.
Delila Catchpole says:
Кокаин
Что этто: Сильнодействующий стимулятор стержневой нервической системы. Представляет собою ярый цинаш, чаще всего вдыхается чрез нос. Быстро побуждает привыкание.
Кто употребляет: Элементарно — юные штаты 20–40 лет, на этом части из гарантированных миров окружения, через слово — для «тусовок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Яко этто: Химический эфир, производное амфетамина. Обладает инициирующим равным образом психодислептическим эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой употребляет: Подростки и молодёжь, почаще на гулянках, рейвах и в течение клубах. Экстренно моден в течение среде тех, кто отыскивает «новые чувства» чи юркий кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения каннабис (марихуаны), держащих рослую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — молодые люди также юные штаты, как правило, в компании. Испущены в связи сравнительной доступности и мифа что касается «безопасности».
Гашиш
Что это: Эфир, штампуемый изо надоедалы растения каннабис. Быть владельцем фигуру тёмных, густых брусков. Курится через сигареты чи особенные устройства.
Кто применяет: Эти ну, кто использует марихуану — подростки, студенты, иногда сильнее старшие потребители, расположенные ко «релаксу» и еще изменению восприятия.
Марихуана
Яко это: Подсушенные листья равным образом цветы растения каннабис. Употребляется путём курения, пореже — в еде. Побуждает успокоение, изменённое восприятие а также эйфорию.
Кто такой употребляет: Шибко широченный круг — от школьников ут взрослых. В некоторых сторонах легализована, яко воздействует сверху восприятие ее как «безобидной», особенно у молодёжи.
Herman Abernathy says:
Снежок
Что этто: Сильный электростимулятор центральной нервическою системы. Представляет собою ярый порошок, почаще всего вдыхается через нос. Я мухой провоцирует привыкание.
Кто такой применяет: Обычно — молодые штаты 20–40 лет, на том количестве с безбедных слоёв общества, часто — чтобы «вечеринок», увеличения энергии, уверенности и еще работоспособности.
Мефедрон
Яко это: Химический эфир, дериват амфетамина. Имеет возбуждающим да галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто такой применяет: Подростки (а) также молодёжь, чаще на вечеринках, рейвах также в течение клубах. Экстренно известен на слою этих, кто такой ищет «последние чувства» чи быстрый кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), держащих высокую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые люди и еще молодые люди, как правило, в течение компании. Разблаговещены за условной доступности да мифа что касается «безопасности».
Гашиш
Яко этто: Эфир, штампуемый изо смолы растения каннабис. Имеет форму тёмных, коренастых брусков. Попыхивается через сигареты или специальные устройства.
Кто такой применяет: Эти ну, кто такой использует марихуану — подростки, учащиеся, эпизодично более совершеннолетние покупатели, расположенные буква «релаксу» и еще изменению восприятия.
Трава
Яко этто: Подсушенные листья и еще цветочки растения каннабис. Применяется путем курения, пореже — на еде. Инициирует расслабление, изменённое цветовосприятие а также эйфорию.
Кто употребляет: Очень широкий круг — от школьников ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, что оказывает большое влияние на восприятие ее как «загоришься», особенно у молодёжи.
Tosha Philips says:
Кокаин
Что этто: Забористый электростимулятор основной нервическою системы. Представляет собою белый порошок, почаще всего вдыхается после нос. Быстро возбуждает привыкание.
Кто применяет: Обычно — юные штаты 20–40 полет, в течение этом части из гарантированных пластов окружения, часто — чтобы «тусовок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Яко этто: Синтетический эфир, производное амфетамина. Имеет инициирующим равно галлюциногенным эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой употребляет: Школьники равным образом молодежь, почаще на пирушках, рейвах и на клубах. Особенно востребован на слою тех, кто ищет «новоиспеченные чувства» или быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения наркотик (марихуаны), охватывающих высокую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые и еще молодые люди, как правило, в течение компании. Излиты за относительной доступности (а) также мифа о «невредности».
Ямба
Яко это: Наркотик, производимый из смолы растения каннабис. Быть владельцем форму тёмных, коренастых брусков. Курится после табак или спец. устройства.
Кто употребляет: Эти же, кто такой утилизирует марихуану — подростки, учащиеся, эпизодично сильнее совершеннолетные потребители, расположенные для «релаксу» а также изменению восприятия.
Трава
Яко это: Высушенные листья и еще цветочки растения каннабис. Применяется путем курения, реже — в течение еде. Побуждает успокоение, изменённое цветовосприятие а также эйфорию.
Кто употребляет: Шибко широкий круг — через подростков ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, яко влияет на цветовосприятие ее как «безобидной», экстренно язык молодёжи.
Jennie Cudmore says:
Снежок
Яко это: Забористый электростимулятор стержневой нервной системы. Представляет собою белый цинаш, чаще всего вдыхается через нос. Быстро возбуждает привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 лет, в течение том части изо гарантированных пластов слоя, через слово — для «вечеринок», подъема энергии, убежденности да работоспособности.
Мефедрон
Яко этто: Синтетический эфир, производное амфетамина. Обладает инициирующим да психодислептическим эффектом. Распространён в течение варианте порошка чи таблеток.
Кто такой применяет: Подростки и молодежь, почаще на гулянках, рейвах и еще на клубах. Экстренно популярен в течение сфере этих, кто ищет «новые чувства» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения наркотик (марихуаны), держащих рослую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — дети и еще юные штаты, как шест, в компании. Распространены за относительной доступности (а) также домысла о «безопасности».
Ямба
Яко это: Наркотик, штампуемый изо смолы растения каннабис. Имеет фигуру тёмных, плотного сложения брусков. Попыхивается вследствие табак чи специализированные устройства.
Кто такой применяет: Те же, кто утилизирует марихуану — подростки, учащиеся, иногда более взрослые потребители, расположенные буква «релаксу» и еще изменению восприятия.
Марихуана
Яко этто: Подсушенные листья и еще цветочки растения каннабис. Применяется путем курения, пореже — на еде. Вызывает расслабление, изменённое восприятие равно эйфорию.
Кто такой употребляет: Очень широкий эклиптика — от подростков до взрослых. НА отдельных государствах легализована, что влияет на восприятие ее как «безопасной», особенно язык молодёжи.
Kassandra Eastman says:
Кокаин
Что это: Сильный электростимулятор центральной нервическою системы. Доставляет собой ярый порошок, чаще честь имею кланяться вдыхается посредством нос. Я мухой возбуждает привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 полет, на этом количестве изо снабженных слоёв окружения, через слово — для «тусовок», увеличения энергии, убежденности а также работоспособности.
Мефедрон
Яко это: Синтетический наркотик, происхождение амфетамина. Иметь в своем распоряжении ускоряющим да психодислептическим эффектом. Распространён в пейзаже порошка или таблеток.
Кто применяет: Подростки (а) также молодежь, почаще сверху гулянках, рейвах и еще в течение клубах. Особенно популярен в течение мире этих, кто такой отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Что этто: Разговорное название элит соцветий растения каннабис (марихуаны), сохраняющих высокую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — дети и юные люди, яко правило, в течение компании. Излиты за сравнительной доступности и мифа что касается «невредности».
Гашиш
Что это: Наркотик, штампуемый из надоедалы растения каннабис. Имеет фигуру тёмных, плотного сложения брусков. Курится сквозь табак или специализированные устройства.
Кто такой употребляет: Эти ну, кто такой использует марихуану — школьники, студенты, иногда сильнее взрослые покупатели, расположенные к «релаксу» и изменению восприятия.
Трава
Что этто: Высушенные хряпа а также цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Инициирует успокоение, изменённое восприятие равно эйфорию.
Кто такой применяет: Шибко широкий круг — от подростков ут взрослых. В отдельных государствах легализована, яко оказывает большое влияние на восприятие ее как «загоришься», особенно язык молодёжи.
Anneliese McMurray says:
Снежок
Яко это: Сильнодействующий электростимулятор центральной нервическою системы. Представляет собою ярый цинаш, чаще честь имею кланяться вдыхается посредством нос. Я мухой возбуждает привыкание.
Кто такой применяет: Элементарно — юные штаты 20–40 лет, в течение том количестве с гарантированных пластов союзы, часто — для «вечеринок», повышения энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Синтетический наркотик, происхождение амфетамина. Иметь в своем распоряжении возбуждающим равно психодислептическим эффектом. Распространён в течение виде порошка чи таблеток.
Кто такой употребляет: Подростки а также молодежь, почаще на тусовках, рейвах да на клубах. Экстренно известен в сфере этих, кто отыскивает «новые чувства» чи юркий кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения каннабис (марихуаны), держащих рослую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — дети также молодые люди, как шест, в течение компании. Разблаговещены из-за относительной доступности (а) также домысла что касается «безвредности».
Ямба
Что этто: Эфир, штампуемый изо надоедалы растения каннабис. Имеет фигуру тёмных, плотного сложения брусков. Курится через сигареты или специализированные устройства.
Кто такой применяет: Эти ну, кто использует марихуану — школьники, учащиеся, иногда более старшие покупатели, расположенные ко «релаксу» и изменению восприятия.
Трава
Яко это: Подсушенные листья и цветочки растения каннабис. Употребляется путем курения, реже — в течение еде. Инициирует успокоение, изменённое восприятие а также эйфорию.
Кто такой употребляет: Шибко широченный круг — через подростков ут взрослых. В ТЕЧЕНИЕ отдельных краях легализована, что влияет на цветовосприятие ее яко «неопасной», особенно у молодёжи.
Jonelle Paton says:
Снежок
Что этто: Сильнодействующий стимулятор стержневой нервической системы. Доставляет собою белый цинаш, почаще всего вдыхается чрез нос. Быстро возбуждает привыкание.
Кто употребляет: Обычно — юные штаты 20–40 лет, в этом числе из снабженных пластов общества, через слово — чтобы «тусовок», подъема энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Синтетический эфир, выводное амфетамина. Обладает инициирующим равно психодислептическим эффектом. Распространён на варианте порошка чи таблеток.
Кто такой применяет: Школьники а также молодежь, чаще на вечеринках, рейвах и еще в клубах. Экстренно моден на слою тех, кто ищет «новоиспеченные чувства» или юркий кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения каннабис (марихуаны), содержащих высокую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — молодые да юные штаты, как правило, на компании. Излиты в связи сравнительной доступности равно мифа что касается «невредности».
Гашиш
Яко это: Наркотик, производимый с надоедалы растения каннабис. Имеет форму тёмных, коренастых брусков. Курится после табак чи особенные устройства.
Кто такой применяет: Те ну, кто такой утилизирует марихуану — подростки, учащиеся, иногда более старшие покупатели, склонные для «релаксу» да изменению восприятия.
Трава
Что это: Высушенные хряпа и цветочки растения каннабис. Применяется путем курения, пореже — в течение еде. Побуждает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто употребляет: Шибко широченный эклиптика — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, что воздействует на цветовосприятие ее как «безобидной», экстренно язык молодёжи.
купить мефедрон says:
Снежок
Что этто: Сильнодействующий электростимулятор
основной нервической системы. Исполнять
роль собой ярый порошок, чаще честь имею кланяться
вдыхается после нос. Я мухой побуждает
привыкание.
Кто такой применяет: Обычно — юные люди
20–40 полет, в течение том количестве изо снабженных слоёв слоя, через слово — чтобы «тусовок», увеличения энергии, убежденности а также работоспособности.
Мефедрон
Яко этто: Химический эфир, производное
амфетамина. Иметь в своем распоряжении ускоряющим равным образом психодислептическим эффектом.
Распространён в течение виде порошка или таблеток.
Кто такой употребляет: Дети равным образом молодежь,
почаще на пирушках, рейвах также в течение
клубах. Экстренно востребован в среде тех, кто такой
отыскивает «последние чувства» или быстрый кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения
наркотик (марихуаны), сохраняющих
высокую фиксацию психоактивного
препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще
честь имею кланяться — молодые также молодые люди,
яко шест, в течение компании.
Разблаговещены в связи относительной доступности (а) также мифа о «невредности».
Ямба
Что этто: Эфир, производимый из надоедалы
растения каннабис. Обладает форму тёмных, густых
брусков. Курится после сигареты или особенные устройства.
Кто употребляет: Те ну, кто такой утилизирует
марихуану — подростки, учащиеся, иногда сильнее совершеннолетные покупатели,
склонные ко «релаксу» а также изменению восприятия.
Марихуана
Что это: Подсушенные листья а также цветы растения
каннабис. Применяется путём курения, пореже — в течение еде.
Инициирует расслабление, изменённое цветовосприятие и еще эйфорию.
Кто употребляет: Очень широкий эклиптика — через подростков ут взрослых.
В отдельных государствах легализована, яко влияет сверху
восприятие её яко «безопасной», особенно язык молодёжи.
Kate Longwell says:
Кокаин
Что этто: Забористый электростимулятор основной сердитой системы. Доставляет собою белый порошок, чаще честь имею кланяться вдыхается через нос. Я мухой вызывает привыкание.
Кто такой применяет: Элементарно — молодые люди 20–40 полет, в течение том числе изо обеспеченных миров слоя, через слово — для «вечеринок», повышения энергии, уверенности да работоспособности.
Мефедрон
Яко это: Синтетический эфир, выводное амфетамина. Иметь в своем распоряжении стимулирующим да психодислептическим эффектом. Распространён в течение наружности порошка или таблеток.
Кто употребляет: Молодые люди (а) также молодежь, почаще на тусовках, рейвах да на клубах. Экстренно моден в мире этих, кто такой отыскивает «новые чувства» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), держащих высокую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — дети и еще юные штаты, как правило, в течение компании. Испущены в связи условной доступности равно мифа о «безвредности».
Гашиш
Яко этто: Наркотик, штампуемый с смолы растения каннабис. Имеет фигуру тёмных, плотного сложения брусков. Попыхивается сквозь сигареты или спец. устройства.
Кто такой применяет: Эти же, кто утилизирует марихуану — подростки, учащиеся вузов, эпизодично сильнее совершеннолетные покупатели, расположенные к «релаксу» и еще изменению восприятия.
Марихуана
Что этто: Высушенные хряпа а также цветочки растения каннабис. Применяется путем курения, реже — в течение еде. Вызывает успокоение, изменённое цветовосприятие и еще эйфорию.
Кто употребляет: Шибко широченный эклиптика — через подростков ут взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, что воздействует на цветовосприятие ее яко «безопасной», экстренно язык молодёжи.
Pearline Batson says:
Кокаин
Что это: Забористый электростимулятор центральной сердитой системы. Рисует собою ярый порошок, почаще всего вдыхается через нос. Я мухой вызывает привыкание.
Кто такой употребляет: Обычно — молодые штаты 20–40 полет, в том части изо гарантированных пластов слоя, через слово — для «тусовок», повышения энергии, уверенности и работоспособности.
Мефедрон
Яко это: Синтетический наркотик, происхождение амфетамина. Иметь в своем распоряжении ускоряющим и психодислептическим эффектом. Распространён в течение виде порошка чи таблеток.
Кто такой употребляет: Дети (а) также молодежь, чаще сверху пирушках, рейвах да в клубах. Особенно востребован в течение сфере тех, кто такой отыскивает «новоиспеченные ощущения» или юркий кайф.
Бошки
Яко это: Разговорное этноним элит соцветий растения наркотик (марихуаны), содержащих высокую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — молодые люди и юные штаты, как шест, на компании. Распространены из-за относительной доступности (а) также домысла о «невредности».
Гашиш
Яко это: Наркотик, штампуемый с надоедалы растения каннабис. Обладает фигуру тёмных, плотного сложения брусков. Попыхивается вследствие табак чи особенные устройства.
Кто такой применяет: Эти ну, кто использует марихуану — подростки, студенты, иногда сильнее совершеннолетние покупатели, склонные ко «релаксу» а также изменению восприятия.
Марихуана
Яко это: Подсушенные хряпа и цветочки растения каннабис. Употребляется путём курения, реже — в еде. Побуждает расслабление, изменённое восприятие равно эйфорию.
Кто такой употребляет: Шибко широкий круг — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, яко влияет сверху цветовосприятие её яко «безобидной», экстренно у молодёжи.
Monika Slocum says:
Кокаин
Яко это: Сильный стимулятор стержневой нервной системы. Представляет собой ярый порошок, почаще честь имею кланяться вдыхается через нос. Быстро вызывает привыкание.
Кто употребляет: Обычно — молодые люди 20–40 полет, в том части изо безбедных пластов окружения, через слово — для «вечеринок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Синтетический эфир, происхождение амфетамина. Иметь в своем распоряжении ускоряющим и галлюциногенным эффектом. Распространён на наружности порошка чи таблеток.
Кто применяет: Молодые люди равным образом молодежь, почаще на гулянках, рейвах и еще в течение клубах. Экстренно известен в мире этих, кто такой ищет «новые ощущения» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), держащих высокую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — молодые и молодые штаты, как шест, в течение компании. Излиты за сравнительной доступности (а) также мифа о «безвредности».
Гашиш
Что этто: Наркотик, производимый изо смолы растения каннабис. Обладает фигуру тёмных, густых брусков. Курится вследствие табак чи особенные устройства.
Кто употребляет: Эти ну, кто такой утилизирует марихуану — школьники, учащиеся вузов, эпизодично сильнее совершеннолетные покупатели, склонные ко «релаксу» и изменению восприятия.
Марихуана
Что это: Высушенные хряпа равным образом цветы растения каннабис. Применяется путем курения, пореже — в течение еде. Побуждает расслабление, изменённое восприятие равно эйфорию.
Кто применяет: Очень широченный эклиптика — от подростков до взрослых. В ТЕЧЕНИЕ отдельных странах легализована, яко воздействует сверху восприятие ее яко «безобидной», особенно язык молодёжи.
Isabell Joseph says:
Кокаин
Что этто: Сильный стимулятор центральной сердитой системы. Доставляет собою ярый порошок, почаще честь имею кланяться вдыхается чрез нос. Я мухой провоцирует привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 полет, в течение том части из обеспеченных пластов союзы, через слово — чтобы «вечеринок», повышения энергии, убежденности да работоспособности.
Мефедрон
Яко это: Синтетический эфир, происхождение амфетамина. Владеет инициирующим равным образом психодислептическим эффектом. Распространён на варианте порошка чи таблеток.
Кто такой применяет: Школьники а также молодежь, чаще на вечеринках, рейвах также в течение клубах. Экстренно известен в сфере тех, кто такой отыскивает «новые ощущения» или быстрый кайф.
Бошки
Что этто: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), держащих высокую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — дети и молодые штаты, яко правило, в течение компании. Испущены из-за условной доступности и домысла что касается «невредности».
Гашиш
Что это: Наркотик, производимый изо смолы растения каннабис. Иметь в распоряжении фигуру тёмных, плотных брусков. Попыхивается вследствие сигареты или особенные устройства.
Кто применяет: Те же, кто такой использует марихуану — школьники, студенты, иногда более совершеннолетние покупатели, расположенные к «релаксу» и изменению восприятия.
Трава
Что это: Подсушенные листья равным образом цветы растения каннабис. Применяется путем курения, реже — в течение еде. Поднимает успокоение, изменённое восприятие и еще эйфорию.
Кто такой применяет: Шибко широченный эклиптика — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, яко действует на цветовосприятие её яко «безобидной», экстренно язык молодёжи.
Toni Wharton says:
Снежок
Яко этто: Забористый стимулятор основной нервной системы. Представляет собой белый порошок, почаще всего вдыхается после нос. Я мухой побуждает привыкание.
Кто такой применяет: Элементарно — молодые штаты 20–40 лет, на этом количестве изо безбедных миров слоя, часто — чтобы «вечеринок», повышения энергии, убежденности да работоспособности.
Мефедрон
Что это: Синтетический эфир, производное амфетамина. Имеет возбуждающим равным образом галлюциногенным эффектом. Распространён на виде порошка чи таблеток.
Кто применяет: Подростки (а) также молодежь, чаще сверху гулянках, рейвах и в клубах. Особенно моден в течение сфере тех, кто ищет «новые ощущения» или быстрый кайф.
Бошки
Что это: Разговорное название макушек соцветий растения наркотик (марихуаны), держащих высокую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — дети и молодые люди, как правило, в течение компании. Испущены ради относительной доступности и мифа что касается «безвредности».
Гашиш
Что это: Наркотик, штампуемый из надоедалы растения каннабис. Обладает фигуру тёмных, коренастых брусков. Попыхивается сквозь табак чи спец. устройства.
Кто употребляет: Эти же, кто такой утилизирует марихуану — подростки, учащиеся вузов, иногда более совершеннолетные покупатели, расположенные ко «релаксу» и еще изменению восприятия.
Марихуана
Что это: Подсушенные листья и еще цветочки растения каннабис. Применяется путем курения, реже — в течение еде. Вызывает расслабление, изменённое цветовосприятие равно эйфорию.
Кто такой употребляет: Шибко широченный круг — через подростков до взрослых. В отдельных краях легализована, яко влияет на восприятие её яко «неопасной», экстренно язык молодёжи.
Lucienne Blankinship says:
Кокаин
Яко этто: Сильнодействующий электростимулятор центральной нервной системы. Доставляет собой ярый цинаш, почаще всего вдыхается после нос. Быстро возбуждает привыкание.
Кто такой употребляет: Обычно — молодые штаты 20–40 полет, на том части из снабженных слоёв общества, через слово — для «тусовок», повышения энергии, убежденности и работоспособности.
Мефедрон
Что этто: Химический наркотик, дериват амфетамина. Иметь в своем распоряжении стимулирующим и психодислептическим эффектом. Распространён на пейзаже порошка чи таблеток.
Кто применяет: Школьники (а) также молодёжь, почаще сверху вечеринках, рейвах и еще на клубах. Экстренно востребован в течение мире этих, кто такой отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения каннабис (марихуаны), сохраняющих рослую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — дети да молодые штаты, как шест, в компании. Распространены ради относительной доступности и мифа о «безвредности».
Ямба
Яко это: Эфир, производимый с смолы растения каннабис. Имеет фигуру тёмных, коренастых брусков. Попыхивается через табак чи спец. устройства.
Кто применяет: Эти ну, кто такой утилизирует марихуану — школьники, учащиеся, эпизодично более взрослые покупатели, расположенные для «релаксу» и изменению восприятия.
Марихуана
Яко этто: Высушенные хряпа равным образом цветочки растения каннабис. Употребляется путем курения, реже — в течение еде. Вызывает успокоение, изменённое восприятие равно эйфорию.
Кто употребляет: Очень широченный эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, что воздействует на восприятие её яко «неопасной», экстренно у молодёжи.
Merrill Gantt says:
Кокаин
Яко это: Забористый электростимулятор стержневой нервической системы. Рисует собою ярый цинаш, почаще всего вдыхается через нос. Быстро вызывает привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 полет, в течение том части из гарантированных пластов союзы, часто — для «вечеринок», увеличения энергии, убежденности да работоспособности.
Мефедрон
Яко это: Химический наркотик, происхождение амфетамина. Иметь в своем распоряжении возбуждающим и галлюциногенным эффектом. Распространён в течение виде порошка или таблеток.
Кто применяет: Школьники а также молодёжь, чаще на вечеринках, рейвах и еще на клубах. Экстренно популярен в течение среде тех, кто отыскивает «последние ощущения» чи юркий кайф.
Бошки
Что это: Разговорное этноним элит соцветий растения наркотик (марихуаны), держащих рослую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — подростки и еще молодые люди, как правило, в течение компании. Распространены из-за относительной доступности и мифа что касается «безопасности».
Ямба
Что этто: Эфир, штампуемый из смолы растения каннабис. Имеет форму тёмных, плотного сложения брусков. Курится сквозь сигареты чи специализированные устройства.
Кто такой употребляет: Эти ну, кто такой утилизирует марихуану — подростки, учащиеся, эпизодично более взрослые потребители, расположенные ко «релаксу» и еще изменению восприятия.
Марихуана
Что это: Подсушенные листья равным образом цветочки растения каннабис. Применяется путём курения, пореже — в течение еде. Инициирует расслабление, изменённое восприятие равно эйфорию.
Кто такой употребляет: Очень широченный круг — через подростков до взрослых. В ТЕЧЕНИЕ отдельных краях легализована, что действует сверху цветовосприятие ее яко «неопасной», экстренно у молодёжи.
Athena Selby says:
Кокаин
Что это: Сильнодействующий стимулятор центральной нервной системы. Представляет собою ярый порошок, почаще всего вдыхается после нос. Я мухой провоцирует привыкание.
Кто применяет: Элементарно — молодые штаты 20–40 полет, в этом количестве из гарантированных миров общества, часто — для «тусовок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Яко этто: Синтетический эфир, производное амфетамина. Иметь в своем распоряжении ускоряющим равным образом психодислептическим эффектом. Распространён в течение варианте порошка или таблеток.
Кто употребляет: Школьники а также молодёжь, почаще сверху тусовках, рейвах и в течение клубах. Особенно популярен в течение мире тех, кто ищет «новые ощущения» чи юркий кайф.
Бошки
Что это: Разговорное название макушек соцветий растения наркотик (марихуаны), содержащих рослую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — подростки также молодые штаты, как шест, в компании. Разблаговещены ради условной доступности да мифа что касается «безопасности».
Гашиш
Что этто: Эфир, производимый с смолы растения каннабис. Иметь в распоряжении фигуру тёмных, коренастых брусков. Курится после табак чи специализированные устройства.
Кто употребляет: Эти ну, кто такой использует марихуану — школьники, учащиеся вузов, эпизодично более совершеннолетние потребители, склонные для «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Подсушенные листья равным образом цветы растения каннабис. Применяется путем курения, реже — в течение еде. Вызывает расслабление, изменённое цветовосприятие а также эйфорию.
Кто употребляет: Шибко широченный круг — через подростков ут взрослых. В ТЕЧЕНИЕ некоторых странах легализована, яко воздействует сверху цветовосприятие её яко «безопасной», особенно язык молодёжи.
купить марихуану says:
Снежок
Что это: Сильнодействующий электростимулятор
основной нервической системы.
Исполнять роль собой ярый порошок, чаще всего вдыхается
после нос. Быстро возбуждает привыкание.
Кто применяет: Обычно — юные
штаты 20–40 лет, в течение этом количестве из безбедных слоёв окружения, через слово — для «тусовок», повышения энергии, убежденности
а также работоспособности.
Мефедрон
Яко этто: Синтетический эфир, дериват амфетамина.
Имеет ускоряющим равно галлюциногенным эффектом.
Распространён в течение пейзаже порошка чи
таблеток.
Кто такой употребляет: Школьники (а)
также молодежь, почаще сверху тусовках,
рейвах да в течение клубах. Экстренно востребован в течение среде тех, кто
отыскивает «новые ощущения» или быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения наркотик (марихуаны),
сохраняющих рослую скопление психоактивного материалу —
ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — молодые люди и еще юные люди, яко шест, в компании.
Излиты в связи относительной доступности равно мифа о
«безвредности».
Ямба
Яко этто: Эфир, производимый
с надоедалы растения каннабис.
Быть владельцем форму тёмных, плотного сложения брусков.
Курится сквозь сигареты или особенные устройства.
Кто такой применяет: Эти ну, кто
такой использует марихуану — подростки, студенты,
иногда более старшие потребители, расположенные к «релаксу» да изменению восприятия.
Марихуана
Яко этто: Высушенные хряпа а также цветы растения каннабис.
Употребляется путём курения,
пореже — на еде. Побуждает расслабление, изменённое восприятие а также эйфорию.
Кто такой употребляет: Шибко
широченный круг — через подростков до взрослых.
В ТЕЧЕНИЕ некоторых странах легализована, яко влияет на восприятие ее яко
«безобидной», экстренно у молодёжи.
바카라추천 says:
무식과 오 대위 사이의 첫 만남입니다.오승훈과 함께 진진희를 체포합니다. 그것은매우훌륭한에서 작동했습니다 https://onlinebaccarat.kr/.
туалетная вода says:
Персидский врач и химик Авиценна (Ибн-Сина) занимался извлечением масел из цветков посредством дистилляции – процедура, https://duhiklass.ru/.
https://centr-ukrayini.forumotion.me/t43-topic says:
в прайс любимых игроками разновидностей в 2025 году вошли: сыры, молоко, кофе, макаронные изделия, https://centr-ukrayini.forumotion.me/t43-topic хлеб и гречка.
プレイオジョ フリースピン says:
まあ三木カジノでは、本当の無償スピンは非常に有益です! プレイオジョ.
my web site … https://freespins.jp/
boat calculator loan says:
bufordneilson@yahoo.com
клуб вулкан играть бесплатно says:
Политика лояльности от руководства клуба понравится даже максимально привередливым пользователям.
Also visit my web site; https://play.google.com/store/apps/details?id=com.vul.games.run.tap&hl=ru
Juanita Whiteman says:
Снежок
Яко этто: Сильнодействующий стимулятор стержневой нервной системы. Рисует собою белый цинаш, чаще всего вдыхается после нос. Быстро вызывает привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 полет, в этом числе с безбедных пластов слоя, через слово — для «тусовок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что это: Химический эфир, выводное амфетамина. Обладает инициирующим и галлюциногенным эффектом. Распространён в течение варианте порошка чи таблеток.
Кто употребляет: Дети равным образом молодёжь, чаще на пирушках, рейвах да в течение клубах. Экстренно известен в сфере тех, кто ищет «последние ощущения» чи быстрый кайф.
Бошки
Что это: Разговорное название элит соцветий растения наркотик (марихуаны), содержащих рослую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — подростки и юные штаты, яко шест, в компании. Испущены ради сравнительной доступности и домысла что касается «безвредности».
Гашиш
Что этто: Наркотик, штампуемый с смолы растения каннабис. Иметь в распоряжении форму тёмных, коренастых брусков. Попыхивается после табак или особенные устройства.
Кто такой употребляет: Те же, кто такой использует марихуану — школьники, учащиеся вузов, иногда более старшие покупатели, расположенные к «релаксу» а также изменению восприятия.
Трава
Яко это: Высушенные хряпа а также цветы растения каннабис. Употребляется путем курения, реже — в течение еде. Поднимает успокоение, изменённое цветовосприятие а также эйфорию.
Кто такой употребляет: Шибко широченный круг — через подростков до взрослых. В ТЕЧЕНИЕ некоторых странах легализована, яко оказывает большое влияние на восприятие её яко «безопасной», экстренно у молодёжи.
Deidre Beaudry says:
Снежок
Что этто: Забористый стимулятор центральной сердитой системы. Исполнять роль собой ярый цинаш, чаще честь имею кланяться вдыхается чрез нос. Быстро провоцирует привыкание.
Кто употребляет: Обычно — молодые люди 20–40 полет, в этом количестве изо снабженных пластов общества, через слово — для «тусовок», подъема энергии, уверенности а также работоспособности.
Мефедрон
Что этто: Синтетический эфир, выводное амфетамина. Иметь в своем распоряжении ускоряющим равным образом психодислептическим эффектом. Распространён на виде порошка или таблеток.
Кто такой применяет: Дети (а) также молодежь, чаще сверху тусовках, рейвах также в течение клубах. Особенно моден в сфере тех, кто такой отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Что этто: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), содержащих высокую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — подростки и еще юные штаты, как шест, в компании. Испущены из-за относительной доступности и мифа что касается «безопасности».
Гашиш
Яко это: Наркотик, штампуемый с надоедалы растения каннабис. Имеет форму тёмных, густых брусков. Попыхивается через табак чи специальные устройства.
Кто такой применяет: Те же, кто использует марихуану — подростки, учащиеся, эпизодично сильнее совершеннолетние покупатели, расположенные буква «релаксу» да изменению восприятия.
Марихуана
Яко это: Подсушенные листья а также цветы растения каннабис. Применяется путем курения, реже — в течение еде. Побуждает расслабление, изменённое цветовосприятие равно эйфорию.
Кто применяет: Шибко широкий эклиптика — от подростков до взрослых. НА некоторых сторонах легализована, яко оказывает большое влияние на цветовосприятие ее яко «неопасной», особенно у молодёжи.
Natisha Wesolowski says:
Снежок
Яко этто: Сильнодействующий стимулятор центральной нервической системы. Исполнять роль собой ярый порошок, почаще всего вдыхается чрез нос. Я мухой возбуждает привыкание.
Кто применяет: Обычно — молодые люди 20–40 лет, в течение том части изо гарантированных миров общества, часто — чтобы «тусовок», увеличения энергии, убежденности да работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, происхождение амфетамина. Обладает инициирующим да психодислептическим эффектом. Распространён в течение наружности порошка или таблеток.
Кто такой применяет: Молодые люди равным образом молодёжь, чаще сверху вечеринках, рейвах и еще в течение клубах. Особенно популярен в среде тех, кто отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), сохраняющих рослую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — дети и молодые люди, яко правило, в течение компании. Распространены из-за сравнительной доступности равно мифа о «безвредности».
Ямба
Яко это: Наркотик, штампуемый из надоедалы растения каннабис. Быть владельцем фигуру тёмных, плотных брусков. Курится через табак чи специализированные устройства.
Кто употребляет: Те ну, кто такой утилизирует марихуану — подростки, студенты, иногда более совершеннолетные покупатели, склонные к «релаксу» и изменению восприятия.
Марихуана
Яко этто: Высушенные хряпа равным образом цветочки растения каннабис. Применяется путем курения, реже — в еде. Инициирует успокоение, изменённое цветовосприятие а также эйфорию.
Кто употребляет: Очень широкий эклиптика — через подростков ут взрослых. В ТЕЧЕНИЕ отдельных странах легализована, яко действует на восприятие ее яко «безобидной», экстренно язык молодёжи.
купить мдма says:
Снежок
Яко это: Сильнодействующий стимулятор стержневой нервной системы.
Рисует собой белый цинаш, почаще честь имею кланяться вдыхается после нос.
Я мухой вызывает привыкание.
Кто такой употребляет: Элементарно — юные штаты 20–40
лет, в течение том числе изо снабженных
пластов окружения, часто — для «вечеринок», подъема энергии, уверенности и еще работоспособности.
Мефедрон
Что это: Синтетический наркотик, дериват амфетамина.
Иметь в своем распоряжении стимулирующим да психодислептическим эффектом.
Распространён в течение пейзаже порошка чи
таблеток.
Кто такой употребляет: Подростки а
также молодёжь, почаще на
пирушках, рейвах и еще в течение клубах.
Особенно известен в мире тех, кто ищет «новые ощущения» или
быстрый кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), охватывающих рослую
скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — молодые и еще молодые люди, яко
шест, в компании. Испущены ради сравнительной доступности да мифа что касается
«безвредности».
Ямба
Яко это: Эфир, производимый с надоедалы
растения каннабис. Обладает форму тёмных, густых брусков.
Курится сквозь табак чи особенные устройства.
Кто такой применяет: Эти же, кто такой использует
марихуану — подростки, студенты,
иногда сильнее взрослые покупатели,
склонные к «релаксу» и еще изменению восприятия.
Трава
Яко этто: Подсушенные хряпа и еще цветочки растения каннабис.
Применяется путём курения, пореже — в течение еде.
Вызывает успокоение, изменённое цветовосприятие
равно эйфорию.
Кто такой употребляет: Очень широкий круг — от школьников до взрослых.
В ТЕЧЕНИЕ отдельных странах легализована, яко влияет сверху цветовосприятие её как
«неопасной», особенно у молодёжи.
Sherlyn Fairbanks says:
Кокаин
Что это: Сильнодействующий стимулятор стержневой нервическою системы. Исполнять роль собой белый порошок, чаще всего вдыхается чрез нос. Я мухой возбуждает привыкание.
Кто такой употребляет: Элементарно — юные люди 20–40 лет, в течение том количестве с безбедных пластов союзы, часто — для «вечеринок», подъема энергии, уверенности и еще работоспособности.
Мефедрон
Яко это: Синтетический эфир, выводное амфетамина. Обладает стимулирующим и галлюциногенным эффектом. Распространён в течение наружности порошка чи таблеток.
Кто употребляет: Подростки а также молодежь, почаще на тусовках, рейвах и еще в течение клубах. Особенно известен на слою этих, кто ищет «новоиспеченные чувства» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), содержащих рослую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — дети и еще молодые люди, как шест, в течение компании. Разблаговещены из-за условной доступности и домысла о «невредности».
Ямба
Яко этто: Наркотик, штампуемый изо надоедалы растения каннабис. Имеет фигуру тёмных, плотного сложения брусков. Курится после табак чи спец. устройства.
Кто такой применяет: Те же, кто такой утилизирует марихуану — школьники, студенты, иногда сильнее взрослые покупатели, склонные для «релаксу» да изменению восприятия.
Трава
Что этто: Подсушенные хряпа и цветы растения каннабис. Употребляется путем курения, реже — в еде. Поднимает расслабление, изменённое цветовосприятие а также эйфорию.
Кто такой употребляет: Шибко широченный круг — от подростков до взрослых. НА отдельных сторонах легализована, что действует на цветовосприятие её яко «безопасной», экстренно язык молодёжи.
Marvin Outhwaite says:
Кокаин
Что это: Сильный электростимулятор основной сердитой системы. Доставляет собою белый цинаш, почаще всего вдыхается чрез нос. Быстро побуждает привыкание.
Кто употребляет: Элементарно — молодые люди 20–40 лет, в течение том количестве изо обеспеченных пластов окружения, через слово — для «тусовок», повышения энергии, уверенности и еще работоспособности.
Мефедрон
Яко этто: Синтетический эфир, происхождение амфетамина. Обладает стимулирующим равно галлюциногенным эффектом. Распространён в течение варианте порошка или таблеток.
Кто такой употребляет: Подростки (а) также молодёжь, чаще на пирушках, рейвах также на клубах. Экстренно востребован в течение сфере тех, кто такой отыскивает «новоиспеченные ощущения» чи быстрый кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), содержащих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — дети и молодые люди, яко шест, в компании. Разблаговещены ради сравнительной доступности (а) также домысла о «невредности».
Ямба
Что этто: Наркотик, производимый с смолы растения каннабис. Обладает фигуру тёмных, плотного сложения брусков. Попыхивается через сигареты или специализированные устройства.
Кто такой применяет: Те же, кто такой использует марихуану — подростки, учащиеся вузов, иногда более взрослые потребители, склонные к «релаксу» да изменению восприятия.
Марихуана
Что это: Подсушенные листья равным образом цветы растения каннабис. Применяется путём курения, реже — в еде. Поднимает успокоение, изменённое цветовосприятие равно эйфорию.
Кто такой применяет: Очень широкий эклиптика — от школьников ут взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, что воздействует на цветовосприятие ее яко «загоришься», экстренно у молодёжи.
Rueben Murray says:
Кокаин
Что это: Сильнодействующий электростимулятор основной нервической системы. Исполнять роль собою белый цинаш, чаще честь имею кланяться вдыхается чрез нос. Я мухой побуждает привыкание.
Кто употребляет: Элементарно — молодые штаты 20–40 лет, в течение этом количестве из безбедных пластов слоя, через слово — для «тусовок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Что этто: Химический эфир, происхождение амфетамина. Иметь в своем распоряжении стимулирующим равно галлюциногенным эффектом. Распространён на варианте порошка или таблеток.
Кто такой применяет: Подростки а также молодёжь, чаще на вечеринках, рейвах да в течение клубах. Особенно востребован на среде этих, кто такой отыскивает «новоиспеченные чувства» или юркий кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения наркотик (марихуаны), содержащих высокую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — молодые также юные штаты, как правило, в компании. Разблаговещены ради сравнительной доступности равно домысла о «безвредности».
Гашиш
Что это: Эфир, штампуемый с смолы растения каннабис. Иметь в распоряжении фигуру тёмных, густых брусков. Попыхивается сквозь сигареты или особенные устройства.
Кто употребляет: Те же, кто такой утилизирует марихуану — подростки, учащиеся, иногда сильнее старшие покупатели, склонные буква «релаксу» да изменению восприятия.
Марихуана
Яко это: Подсушенные хряпа а также цветочки растения каннабис. Употребляется путем курения, пореже — на еде. Поднимает расслабление, изменённое восприятие равно эйфорию.
Кто такой употребляет: Шибко широченный эклиптика — от школьников ут взрослых. В некоторых странах легализована, что действует сверху восприятие ее как «безобидной», экстренно язык молодёжи.
Loretta Canty says:
Снежок
Что этто: Сильный стимулятор основной нервическою системы. Исполнять роль собой белый порошок, чаще всего вдыхается чрез нос. Я мухой возбуждает привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 полет, в течение том числе с безбедных миров общества, через слово — для «тусовок», увеличения энергии, убежденности да работоспособности.
Мефедрон
Что это: Химический эфир, происхождение амфетамина. Имеет инициирующим да галлюциногенным эффектом. Распространён в течение варианте порошка чи таблеток.
Кто применяет: Дети и молодежь, чаще сверху тусовках, рейвах да в течение клубах. Экстренно востребован в течение мире этих, кто отыскивает «новоиспеченные ощущения» или юркий кайф.
Бошки
Что это: Разговорное этноним элит соцветий растения наркотик (марихуаны), содержащих рослую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — молодые люди да молодые штаты, как шест, в компании. Испущены в связи относительной доступности (а) также домысла о «безопасности».
Ямба
Что это: Наркотик, производимый изо смолы растения каннабис. Иметь в распоряжении фигуру тёмных, коренастых брусков. Курится вследствие сигареты или специальные устройства.
Кто употребляет: Эти ну, кто такой использует марихуану — подростки, учащиеся, иногда более взрослые потребители, расположенные буква «релаксу» а также изменению восприятия.
Марихуана
Что этто: Высушенные листья равным образом цветы растения каннабис. Применяется путём курения, реже — в течение еде. Вызывает расслабление, изменённое цветовосприятие и эйфорию.
Кто такой применяет: Очень широченный круг — от школьников до взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, яко оказывает большое влияние на восприятие её как «неопасной», особенно у молодёжи.
Ramiro Fairbanks says:
Кокаин
Яко этто: Сильный стимулятор стержневой сердитой системы. Рисует собою ярый цинаш, чаще всего вдыхается после нос. Я мухой побуждает привыкание.
Кто такой применяет: Элементарно — молодые люди 20–40 полет, в течение том количестве с безбедных миров слоя, через слово — чтобы «вечеринок», повышения энергии, уверенности да работоспособности.
Мефедрон
Яко этто: Синтетический эфир, дериват амфетамина. Иметь в своем распоряжении ускоряющим да психодислептическим эффектом. Распространён в наружности порошка или таблеток.
Кто употребляет: Молодые люди а также молодёжь, почаще сверху пирушках, рейвах и еще в клубах. Экстренно моден в течение мире тех, кто такой ищет «новые чувства» или быстрый кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения наркотик (марихуаны), охватывающих высокую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — подростки и еще юные штаты, яко шест, в компании. Распространены из-за условной доступности да домысла что касается «безвредности».
Гашиш
Яко это: Эфир, производимый из надоедалы растения каннабис. Быть владельцем форму тёмных, густых брусков. Попыхивается сквозь сигареты или спец. устройства.
Кто такой применяет: Те же, кто использует марихуану — школьники, учащиеся, иногда более старшие потребители, склонные для «релаксу» да изменению восприятия.
Трава
Яко это: Подсушенные хряпа и еще цветочки растения каннабис. Употребляется путём курения, реже — в течение еде. Побуждает расслабление, изменённое восприятие и еще эйфорию.
Кто применяет: Шибко широкий круг — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых краях легализована, что воздействует на цветовосприятие её как «безобидной», особенно у молодёжи.
Moses Cuevas says:
Кокаин
Яко это: Сильный электростимулятор основной сердитой системы. Исполнять роль собой белый цинаш, чаще всего вдыхается после нос. Я мухой провоцирует привыкание.
Кто употребляет: Элементарно — юные люди 20–40 полет, в течение этом числе с гарантированных миров общества, часто — чтобы «вечеринок», увеличения энергии, уверенности а также работоспособности.
Мефедрон
Что этто: Синтетический наркотик, дериват амфетамина. Обладает стимулирующим равно психодислептическим эффектом. Распространён в течение наружности порошка чи таблеток.
Кто употребляет: Дети а также молодёжь, чаще на вечеринках, рейвах да в течение клубах. Экстренно моден в течение мире тех, кто такой ищет «последние ощущения» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), держащих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — молодые люди и еще юные штаты, яко правило, в течение компании. Испущены за условной доступности равно мифа что касается «невредности».
Ямба
Что этто: Наркотик, штампуемый с смолы растения каннабис. Иметь в распоряжении форму тёмных, плотных брусков. Попыхивается через сигареты или особенные устройства.
Кто применяет: Эти ну, кто утилизирует марихуану — подростки, студенты, эпизодично сильнее взрослые потребители, склонные к «релаксу» и изменению восприятия.
Марихуана
Яко это: Подсушенные листья а также цветочки растения каннабис. Употребляется путём курения, реже — в течение еде. Побуждает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто применяет: Очень широченный эклиптика — от школьников до взрослых. НА отдельных государствах легализована, яко влияет сверху восприятие её яко «неопасной», особенно у молодёжи.
Chelsey Goodchap says:
Снежок
Что этто: Забористый стимулятор стержневой нервной системы. Исполнять роль собой белый цинаш, почаще всего вдыхается после нос. Быстро возбуждает привыкание.
Кто применяет: Элементарно — юные люди 20–40 лет, в том количестве с гарантированных слоёв окружения, через слово — для «вечеринок», увеличения энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Химический наркотик, выводное амфетамина. Имеет возбуждающим да галлюциногенным эффектом. Распространён в течение варианте порошка чи таблеток.
Кто такой применяет: Подростки равным образом молодёжь, почаще на гулянках, рейвах да в клубах. Экстренно моден на мире этих, кто ищет «новоиспеченные ощущения» или быстрый кайф.
Бошки
Яко это: Разговорное этноним элит соцветий растения каннабис (марихуаны), охватывающих высокую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — молодые также молодые люди, яко шест, в течение компании. Разблаговещены ради сравнительной доступности и домысла что касается «безопасности».
Гашиш
Что это: Эфир, производимый с надоедалы растения каннабис. Имеет фигуру тёмных, коренастых брусков. Курится вследствие табак чи особенные устройства.
Кто такой применяет: Эти ну, кто утилизирует марихуану — подростки, студенты, иногда сильнее совершеннолетние потребители, расположенные к «релаксу» да изменению восприятия.
Марихуана
Яко этто: Подсушенные хряпа и цветочки растения каннабис. Применяется путём курения, реже — в течение еде. Поднимает успокоение, изменённое цветовосприятие и эйфорию.
Кто такой применяет: Шибко широченный круг — через подростков ут взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, что влияет на цветовосприятие ее яко «безопасной», особенно язык молодёжи.
Art Buring says:
Снежок
Яко этто: Сильнодействующий стимулятор основной нервной системы. Исполнять роль собой белый порошок, почаще честь имею кланяться вдыхается после нос. Я мухой вызывает привыкание.
Кто употребляет: Элементарно — юные штаты 20–40 полет, на этом количестве изо снабженных пластов общества, через слово — чтобы «тусовок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Яко это: Синтетический наркотик, производное амфетамина. Владеет стимулирующим и психодислептическим эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой употребляет: Школьники (а) также молодежь, почаще сверху пирушках, рейвах да в течение клубах. Особенно востребован в течение среде этих, кто отыскивает «новые чувства» или юркий кайф.
Бошки
Яко это: Разговорное название макушек соцветий растения наркотик (марихуаны), охватывающих рослую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — молодые люди также юные штаты, яко шест, в течение компании. Разблаговещены из-за относительной доступности равно мифа о «невредности».
Ямба
Яко это: Наркотик, производимый изо смолы растения каннабис. Имеет форму тёмных, плотного сложения брусков. Курится вследствие сигареты чи специализированные устройства.
Кто применяет: Эти же, кто такой использует марихуану — подростки, учащиеся вузов, эпизодично сильнее старшие потребители, расположенные для «релаксу» а также изменению восприятия.
Марихуана
Что этто: Высушенные хряпа а также цветы растения каннабис. Применяется путем курения, реже — на еде. Вызывает расслабление, изменённое цветовосприятие равно эйфорию.
Кто употребляет: Очень широченный эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, яко оказывает большое влияние на восприятие ее яко «загоришься», экстренно у молодёжи.
Francisca Mayhew says:
Кокаин
Что этто: Забористый стимулятор основной нервической системы. Представляет собой ярый порошок, почаще всего вдыхается посредством нос. Быстро возбуждает привыкание.
Кто такой применяет: Обычно — юные люди 20–40 лет, на этом количестве с обеспеченных пластов общества, часто — чтобы «тусовок», подъема энергии, уверенности да работоспособности.
Мефедрон
Что это: Синтетический эфир, выводное амфетамина. Иметь в своем распоряжении стимулирующим равно психодислептическим эффектом. Распространён в варианте порошка чи таблеток.
Кто употребляет: Дети а также молодежь, чаще на пирушках, рейвах и еще в течение клубах. Особенно востребован в течение среде этих, кто такой отыскивает «новые ощущения» или быстрый кайф.
Бошки
Яко это: Разговорное название элит соцветий растения каннабис (марихуаны), содержащих высокую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — молодые и юные люди, яко правило, на компании. Излиты ради условной доступности и мифа что касается «безвредности».
Гашиш
Что это: Эфир, штампуемый с надоедалы растения каннабис. Быть владельцем форму тёмных, плотного сложения брусков. Курится через сигареты или специальные устройства.
Кто употребляет: Те ну, кто утилизирует марихуану — школьники, учащиеся, эпизодично сильнее совершеннолетние покупатели, расположенные к «релаксу» да изменению восприятия.
Трава
Что этто: Высушенные листья а также цветочки растения каннабис. Применяется путём курения, реже — в течение еде. Побуждает успокоение, изменённое восприятие и еще эйфорию.
Кто применяет: Очень широченный эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ отдельных краях легализована, что оказывает большое влияние сверху восприятие ее как «неопасной», экстренно язык молодёжи.
Rebbeca Halfey says:
Кокаин
Яко это: Сильный стимулятор основной нервной системы. Рисует собой ярый цинаш, почаще всего вдыхается через нос. Быстро провоцирует привыкание.
Кто употребляет: Обычно — молодые люди 20–40 полет, в течение том количестве изо снабженных пластов слоя, через слово — чтобы «тусовок», повышения энергии, уверенности и еще работоспособности.
Мефедрон
Что этто: Химический наркотик, происхождение амфетамина. Имеет возбуждающим равно галлюциногенным эффектом. Распространён на варианте порошка чи таблеток.
Кто применяет: Подростки (а) также молодежь, чаще на вечеринках, рейвах и еще в клубах. Экстренно востребован в слою этих, кто такой отыскивает «новые чувства» или быстрый кайф.
Бошки
Что это: Разговорное этноним элит соцветий растения каннабис (марихуаны), содержащих рослую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — подростки и юные люди, яко шест, на компании. Распространены ради относительной доступности и домысла о «безопасности».
Ямба
Что этто: Наркотик, производимый изо надоедалы растения каннабис. Имеет фигуру тёмных, коренастых брусков. Курится вследствие сигареты чи специализированные устройства.
Кто такой применяет: Те же, кто такой утилизирует марихуану — подростки, студенты, иногда сильнее старшие потребители, расположенные для «релаксу» да изменению восприятия.
Трава
Яко это: Высушенные хряпа и цветы растения каннабис. Применяется путём курения, реже — на еде. Поднимает расслабление, изменённое восприятие а также эйфорию.
Кто употребляет: Очень широкий эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, что оказывает большое влияние на цветовосприятие ее яко «неопасной», экстренно у молодёжи.
Maynard Pettis says:
Кокаин
Что этто: Сильный электростимулятор центральной нервической системы. Рисует собой белый цинаш, чаще всего вдыхается чрез нос. Я мухой возбуждает привыкание.
Кто употребляет: Элементарно — молодые люди 20–40 полет, на том числе с безбедных пластов союзы, часто — чтобы «вечеринок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Яко это: Синтетический эфир, производное амфетамина. Имеет ускоряющим и психодислептическим эффектом. Распространён в наружности порошка чи таблеток.
Кто употребляет: Дети и молодежь, почаще на гулянках, рейвах да в течение клубах. Экстренно востребован в течение слою тех, кто отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), содержащих высокую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — молодые люди да юные люди, как шест, в течение компании. Разблаговещены из-за относительной доступности да мифа о «невредности».
Гашиш
Что это: Эфир, производимый изо надоедалы растения каннабис. Имеет фигуру тёмных, плотного сложения брусков. Попыхивается вследствие сигареты чи специализированные устройства.
Кто такой применяет: Те ну, кто использует марихуану — подростки, учащиеся, эпизодично более совершеннолетние потребители, расположенные ко «релаксу» да изменению восприятия.
Марихуана
Что это: Подсушенные листья и цветы растения каннабис. Применяется путём курения, реже — в еде. Инициирует успокоение, изменённое цветовосприятие и эйфорию.
Кто употребляет: Очень широченный круг — от школьников до взрослых. В ТЕЧЕНИЕ отдельных краях легализована, яко оказывает большое влияние сверху восприятие её как «безобидной», особенно у молодёжи.
Edwin Sorensen says:
Снежок
Что это: Сильнодействующий электростимулятор центральной нервической системы. Представляет собой белый цинаш, чаще честь имею кланяться вдыхается чрез нос. Я мухой побуждает привыкание.
Кто употребляет: Элементарно — юные штаты 20–40 полет, в этом части изо снабженных миров общества, часто — для «тусовок», подъема энергии, убежденности да работоспособности.
Мефедрон
Яко это: Синтетический наркотик, происхождение амфетамина. Имеет ускоряющим и галлюциногенным эффектом. Распространён в течение варианте порошка или таблеток.
Кто применяет: Молодые люди равным образом молодежь, почаще сверху гулянках, рейвах да в течение клубах. Особенно моден в течение сфере этих, кто такой отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Что это: Разговорное этноним элит соцветий растения каннабис (марихуаны), охватывающих рослую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — подростки также юные люди, как шест, в компании. Испущены из-за условной доступности да мифа о «невредности».
Гашиш
Яко этто: Наркотик, производимый из надоедалы растения каннабис. Имеет форму тёмных, коренастых брусков. Курится после табак чи специальные устройства.
Кто употребляет: Эти ну, кто такой использует марихуану — школьники, учащиеся вузов, эпизодично более совершеннолетние потребители, склонные к «релаксу» и еще изменению восприятия.
Марихуана
Что это: Высушенные хряпа и цветы растения каннабис. Употребляется путем курения, реже — в течение еде. Вызывает расслабление, изменённое цветовосприятие а также эйфорию.
Кто такой применяет: Шибко широченный эклиптика — от подростков ут взрослых. В отдельных сторонах легализована, что оказывает большое влияние на восприятие её как «безопасной», экстренно у молодёжи.
Major Bouton says:
Снежок
Что этто: Сильнодействующий электростимулятор центральной нервической системы. Рисует собой ярый цинаш, почаще всего вдыхается посредством нос. Быстро провоцирует привыкание.
Кто такой употребляет: Обычно — молодые люди 20–40 лет, в течение этом части с безбедных миров окружения, через слово — для «вечеринок», подъема энергии, уверенности и работоспособности.
Мефедрон
Что это: Синтетический эфир, происхождение амфетамина. Имеет ускоряющим равно психодислептическим эффектом. Распространён на наружности порошка чи таблеток.
Кто такой применяет: Молодые люди и молодёжь, почаще на вечеринках, рейвах также на клубах. Особенно востребован на сфере тех, кто такой ищет «новоиспеченные чувства» или быстрый кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), содержащих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — молодые и еще юные люди, как шест, в компании. Испущены ради относительной доступности (а) также домысла о «безопасности».
Ямба
Что это: Эфир, производимый с смолы растения каннабис. Обладает форму тёмных, плотного сложения брусков. Попыхивается после табак или спец. устройства.
Кто такой применяет: Эти ну, кто использует марихуану — подростки, учащиеся вузов, эпизодично сильнее взрослые потребители, расположенные к «релаксу» да изменению восприятия.
Марихуана
Что это: Высушенные хряпа равным образом цветочки растения каннабис. Применяется путём курения, реже — в еде. Побуждает расслабление, изменённое цветовосприятие равно эйфорию.
Кто применяет: Очень широченный круг — через школьников ут взрослых. В некоторых государствах легализована, что действует на цветовосприятие её яко «безопасной», экстренно язык молодёжи.
купить амфетамин says:
Снежок
Яко это: Сильный электростимулятор стержневой нервическою системы.
Представляет собою белый цинаш, чаще честь имею
кланяться вдыхается посредством нос.
Я мухой провоцирует привыкание.
Кто такой применяет: Обычно
— молодые люди 20–40 лет, в том количестве
из гарантированных миров окружения,
через слово — чтобы «вечеринок», подъема энергии, уверенности и еще работоспособности.
Мефедрон
Яко этто: Синтетический эфир, выводное амфетамина.
Владеет ускоряющим да галлюциногенным эффектом.
Распространён на варианте порошка чи таблеток.
Кто такой применяет: Дети а также молодёжь, чаще сверху гулянках, рейвах и в течение клубах.
Экстренно известен в сфере тех, кто ищет
«новые ощущения» чи юркий кайф.
Бошки
Что этто: Разговорное название макушек соцветий растения наркотик (марихуаны), охватывающих высокую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — дети и еще молодые штаты, яко правило, в течение компании.
Излиты из-за условной доступности и мифа что касается «безвредности».
Ямба
Что этто: Эфир, штампуемый из смолы растения каннабис.
Иметь в распоряжении фигуру тёмных, коренастых брусков.
Курится вследствие табак или особенные устройства.
Кто употребляет: Эти же, кто использует марихуану — подростки,
студенты, иногда сильнее
совершеннолетние покупатели,
расположенные для «релаксу» и еще изменению восприятия.
Трава
Яко этто: Подсушенные листья а также
цветы растения каннабис. Употребляется
путем курения, пореже — в течение еде.
Побуждает расслабление, изменённое цветовосприятие и эйфорию.
Кто такой употребляет: Очень широченный эклиптика — через школьников ут взрослых.
В ТЕЧЕНИЕ некоторых странах легализована, яко воздействует сверху цветовосприятие её
яко «загоришься», экстренно у молодёжи.
Bill Mockridge says:
Снежок
Что этто: Сильнодействующий стимулятор основной нервическою системы. Представляет собой ярый порошок, чаще всего вдыхается после нос. Быстро вызывает привыкание.
Кто такой употребляет: Элементарно — юные штаты 20–40 лет, на этом числе из безбедных пластов общества, часто — для «тусовок», повышения энергии, убежденности да работоспособности.
Мефедрон
Что этто: Синтетический эфир, производное амфетамина. Имеет возбуждающим равно галлюциногенным эффектом. Распространён на виде порошка чи таблеток.
Кто применяет: Дети а также молодёжь, почаще на гулянках, рейвах также в течение клубах. Экстренно моден в течение слою тех, кто такой отыскивает «новые чувства» или юркий кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), содержащих рослую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — молодые также молодые люди, как шест, в компании. Излиты в связи условной доступности и мифа о «безопасности».
Гашиш
Яко это: Эфир, штампуемый из надоедалы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Попыхивается вследствие табак чи специализированные устройства.
Кто такой применяет: Те же, кто такой утилизирует марихуану — подростки, учащиеся вузов, эпизодично сильнее совершеннолетние покупатели, расположенные к «релаксу» и еще изменению восприятия.
Марихуана
Что этто: Подсушенные листья а также цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Инициирует расслабление, изменённое цветовосприятие а также эйфорию.
Кто применяет: Шибко широкий круг — через подростков ут взрослых. В ТЕЧЕНИЕ некоторых странах легализована, что влияет сверху восприятие её как «загоришься», особенно язык молодёжи.
Margart Bratcher says:
Снежок
Что это: Забористый стимулятор центральной нервическою системы. Представляет собой ярый цинаш, чаще честь имею кланяться вдыхается посредством нос. Я мухой возбуждает привыкание.
Кто такой употребляет: Обычно — молодые люди 20–40 лет, в этом части с гарантированных слоёв окружения, через слово — для «тусовок», подъема энергии, уверенности да работоспособности.
Мефедрон
Яко это: Химический наркотик, выводное амфетамина. Владеет возбуждающим да психодислептическим эффектом. Распространён в течение варианте порошка чи таблеток.
Кто употребляет: Подростки (а) также молодёжь, чаще на пирушках, рейвах и еще в клубах. Экстренно известен в слою тех, кто такой ищет «последние ощущения» или юркий кайф.
Бошки
Яко это: Разговорное этноним элит соцветий растения наркотик (марихуаны), охватывающих рослую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — молодые и еще юные люди, как шест, в течение компании. Распространены ради сравнительной доступности (а) также домысла о «невредности».
Гашиш
Яко это: Наркотик, штампуемый с смолы растения каннабис. Обладает фигуру тёмных, коренастых брусков. Курится через табак или специальные устройства.
Кто такой употребляет: Те же, кто использует марихуану — школьники, студенты, иногда более совершеннолетние потребители, расположенные для «релаксу» и изменению восприятия.
Трава
Яко этто: Высушенные хряпа а также цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Инициирует успокоение, изменённое восприятие равно эйфорию.
Кто такой применяет: Шибко широченный эклиптика — через подростков ут взрослых. НА отдельных странах легализована, что воздействует сверху цветовосприятие ее как «неопасной», экстренно у молодёжи.
Emily Vivier says:
Кокаин
Что это: Сильный стимулятор стержневой нервической системы. Рисует собой ярый цинаш, чаще всего вдыхается чрез нос. Я мухой провоцирует привыкание.
Кто такой применяет: Обычно — молодые люди 20–40 лет, в течение том части с обеспеченных пластов союзы, часто — для «вечеринок», повышения энергии, убежденности и работоспособности.
Мефедрон
Яко это: Химический наркотик, выводное амфетамина. Обладает инициирующим равным образом галлюциногенным эффектом. Распространён на пейзаже порошка или таблеток.
Кто применяет: Дети (а) также молодежь, чаще на тусовках, рейвах да на клубах. Особенно моден на среде тех, кто отыскивает «новые чувства» или юркий кайф.
Бошки
Яко это: Разговорное название элит соцветий растения наркотик (марихуаны), сохраняющих высокую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — подростки и еще юные штаты, как шест, в компании. Распространены за условной доступности да домысла о «безвредности».
Гашиш
Яко это: Эфир, производимый с надоедалы растения каннабис. Иметь в распоряжении форму тёмных, густых брусков. Попыхивается после табак чи специальные устройства.
Кто такой применяет: Эти же, кто использует марихуану — школьники, студенты, эпизодично сильнее взрослые потребители, расположенные буква «релаксу» и изменению восприятия.
Трава
Яко этто: Подсушенные листья и еще цветы растения каннабис. Применяется путём курения, реже — в течение еде. Побуждает расслабление, изменённое восприятие и еще эйфорию.
Кто такой применяет: Шибко широченный эклиптика — через подростков до взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, что действует сверху цветовосприятие её яко «безобидной», особенно язык молодёжи.
Marlene Atkins says:
Снежок
Что это: Сильный электростимулятор стержневой сердитой системы. Исполнять роль собою белый цинаш, почаще честь имею кланяться вдыхается посредством нос. Я мухой побуждает привыкание.
Кто применяет: Обычно — юные люди 20–40 полет, в том части с безбедных пластов союзы, через слово — чтобы «вечеринок», подъема энергии, убежденности и еще работоспособности.
Мефедрон
Яко этто: Синтетический эфир, выводное амфетамина. Владеет ускоряющим и психодислептическим эффектом. Распространён на наружности порошка чи таблеток.
Кто такой применяет: Дети и молодёжь, чаще на пирушках, рейвах и на клубах. Особенно известен в течение слою этих, кто ищет «новые ощущения» чи быстрый кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), содержащих рослую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — подростки да юные штаты, яко шест, в компании. Излиты из-за сравнительной доступности (а) также мифа что касается «безопасности».
Гашиш
Что это: Наркотик, производимый из надоедалы растения каннабис. Быть владельцем фигуру тёмных, плотного сложения брусков. Курится после сигареты чи специальные устройства.
Кто применяет: Те ну, кто использует марихуану — подростки, учащиеся, иногда более совершеннолетные потребители, склонные буква «релаксу» и изменению восприятия.
Марихуана
Яко этто: Высушенные хряпа равным образом цветочки растения каннабис. Применяется путём курения, пореже — на еде. Поднимает расслабление, изменённое восприятие равно эйфорию.
Кто такой применяет: Шибко широкий круг — через подростков до взрослых. В некоторых сторонах легализована, яко влияет сверху восприятие её как «загоришься», экстренно у молодёжи.
Bret Morgan says:
Кокаин
Что это: Сильнодействующий электростимулятор стержневой нервической системы. Представляет собой белый порошок, чаще честь имею кланяться вдыхается после нос. Я мухой возбуждает привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 лет, в том части с снабженных миров общества, часто — для «тусовок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Что это: Химический наркотик, происхождение амфетамина. Имеет возбуждающим да психодислептическим эффектом. Распространён в пейзаже порошка чи таблеток.
Кто такой употребляет: Дети равным образом молодежь, почаще сверху вечеринках, рейвах и еще на клубах. Экстренно востребован в течение среде этих, кто такой отыскивает «новые ощущения» чи юркий кайф.
Бошки
Что этто: Разговорное название макушек соцветий растения каннабис (марихуаны), держащих высокую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — подростки да юные люди, яко правило, на компании. Разблаговещены ради сравнительной доступности (а) также мифа что касается «безвредности».
Гашиш
Яко это: Наркотик, производимый с надоедалы растения каннабис. Иметь в распоряжении форму тёмных, плотного сложения брусков. Курится после табак или спец. устройства.
Кто применяет: Эти же, кто утилизирует марихуану — подростки, учащиеся, иногда более взрослые покупатели, расположенные буква «релаксу» и еще изменению восприятия.
Трава
Что это: Высушенные хряпа и цветочки растения каннабис. Употребляется путём курения, реже — в течение еде. Поднимает успокоение, изменённое восприятие равно эйфорию.
Кто употребляет: Шибко широкий эклиптика — от школьников ут взрослых. В ТЕЧЕНИЕ отдельных краях легализована, что оказывает большое влияние сверху цветовосприятие ее как «безобидной», особенно у молодёжи.
Johnson Littlejohn says:
Снежок
Яко это: Сильнодействующий электростимулятор центральной сердитой системы. Исполнять роль собой белый цинаш, почаще честь имею кланяться вдыхается через нос. Быстро возбуждает привыкание.
Кто употребляет: Обычно — юные штаты 20–40 лет, на этом количестве изо снабженных пластов окружения, часто — чтобы «тусовок», увеличения энергии, уверенности и еще работоспособности.
Мефедрон
Что это: Химический наркотик, дериват амфетамина. Имеет инициирующим да психодислептическим эффектом. Распространён на варианте порошка или таблеток.
Кто такой применяет: Дети равным образом молодежь, чаще сверху пирушках, рейвах и еще на клубах. Экстренно популярен в среде тех, кто такой отыскивает «последние ощущения» или юркий кайф.
Бошки
Что это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), держащих высокую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — подростки и юные люди, как правило, в компании. Излиты в связи сравнительной доступности и домысла что касается «невредности».
Гашиш
Что этто: Наркотик, производимый из надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, плотных брусков. Попыхивается через сигареты или спец. устройства.
Кто применяет: Те же, кто такой использует марихуану — школьники, студенты, иногда сильнее старшие покупатели, склонные для «релаксу» и еще изменению восприятия.
Трава
Что это: Подсушенные листья равным образом цветы растения каннабис. Употребляется путем курения, реже — на еде. Побуждает расслабление, изменённое восприятие и эйфорию.
Кто применяет: Очень широкий эклиптика — через подростков ут взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, яко воздействует на цветовосприятие ее яко «безобидной», особенно у молодёжи.
Dan Best says:
Кокаин
Что это: Сильный стимулятор основной нервическою системы. Рисует собою ярый порошок, чаще всего вдыхается чрез нос. Я мухой побуждает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 полет, в том количестве с снабженных пластов союзы, часто — чтобы «вечеринок», подъема энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Синтетический эфир, выводное амфетамина. Владеет инициирующим да психодислептическим эффектом. Распространён на наружности порошка чи таблеток.
Кто применяет: Подростки (а) также молодёжь, чаще на гулянках, рейвах да в течение клубах. Экстренно популярен в течение сфере этих, кто отыскивает «новые чувства» или юркий кайф.
Бошки
Что этто: Разговорное название элит соцветий растения каннабис (марихуаны), охватывающих рослую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — молодые и еще юные штаты, яко правило, в компании. Распространены из-за относительной доступности да домысла о «невредности».
Ямба
Яко это: Эфир, производимый с смолы растения каннабис. Иметь в распоряжении форму тёмных, плотных брусков. Курится через табак или спец. устройства.
Кто употребляет: Эти ну, кто такой использует марихуану — школьники, учащиеся вузов, иногда более совершеннолетние покупатели, склонные для «релаксу» а также изменению восприятия.
Трава
Что это: Высушенные хряпа и цветы растения каннабис. Употребляется путём курения, пореже — в течение еде. Поднимает успокоение, изменённое восприятие равно эйфорию.
Кто применяет: Очень широченный эклиптика — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, яко влияет на цветовосприятие её яко «загоришься», особенно язык молодёжи.
Doreen Churchill says:
Снежок
Что этто: Сильный стимулятор стержневой нервной системы. Рисует собою белый цинаш, чаще честь имею кланяться вдыхается после нос. Я мухой вызывает привыкание.
Кто такой применяет: Обычно — юные штаты 20–40 лет, в этом количестве изо гарантированных пластов слоя, через слово — для «вечеринок», увеличения энергии, уверенности а также работоспособности.
Мефедрон
Что этто: Синтетический эфир, выводное амфетамина. Иметь в своем распоряжении ускоряющим равным образом галлюциногенным эффектом. Распространён на пейзаже порошка чи таблеток.
Кто такой применяет: Подростки и молодёжь, почаще сверху тусовках, рейвах и еще в течение клубах. Экстренно моден в течение мире тех, кто такой ищет «новоиспеченные чувства» или юркий кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), держащих рослую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — дети также молодые штаты, как шест, в течение компании. Разблаговещены за сравнительной доступности да мифа о «безвредности».
Гашиш
Яко это: Наркотик, производимый изо надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, плотных брусков. Попыхивается сквозь сигареты чи спец. устройства.
Кто такой применяет: Эти ну, кто утилизирует марихуану — школьники, учащиеся вузов, эпизодично более совершеннолетные потребители, расположенные для «релаксу» а также изменению восприятия.
Марихуана
Что это: Высушенные хряпа и еще цветочки растения каннабис. Применяется путём курения, реже — на еде. Поднимает успокоение, изменённое цветовосприятие и еще эйфорию.
Кто употребляет: Шибко широкий круг — через подростков до взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, яко оказывает большое влияние на восприятие её яко «неопасной», экстренно язык молодёжи.
поверка счетчиков владимир says:
в принципе поверки собственник жилья получает «диплом о поверке», как подтверждение, https://%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%BC%D0%B8%D1%80.%D0%BF%D0%BE%D0%B2%D0%B5%D1%80%D0%BA%D0%B0.%D0%BE%D1%80%D0%B3/ что прибор учета.
поверка счетчиков щербинка says:
Затем мастер подает в счетчик немного невнятности и https://%D1%89%D0%B5%D1%80%D0%B1%D0%B8%D0%BD%D0%BA%D0%B0.%D0%BF%D0%BE%D0%B2%D0%B5%D1%80%D0%BA%D0%B0.%D0%BE%D1%80%D0%B3/ измеряет его показания.
Chassidy Cole says:
Снежок
Яко этто: Забористый электростимулятор центральной сердитой системы. Доставляет собой белый цинаш, чаще всего вдыхается после нос. Я мухой провоцирует привыкание.
Кто такой употребляет: Обычно — молодые люди 20–40 лет, в этом количестве из снабженных миров общества, часто — для «тусовок», повышения энергии, убежденности да работоспособности.
Мефедрон
Что этто: Синтетический наркотик, дериват амфетамина. Иметь в своем распоряжении ускоряющим равным образом психодислептическим эффектом. Распространён в течение виде порошка чи таблеток.
Кто применяет: Молодые люди равным образом молодежь, почаще на гулянках, рейвах и на клубах. Особенно известен в течение мире тех, кто ищет «последние ощущения» или быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), содержащих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — молодые также молодые люди, как шест, в течение компании. Разблаговещены из-за сравнительной доступности (а) также домысла о «невредности».
Гашиш
Что это: Эфир, штампуемый с надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, плотного сложения брусков. Попыхивается сквозь сигареты чи специальные устройства.
Кто употребляет: Эти же, кто использует марихуану — школьники, учащиеся вузов, эпизодично сильнее старшие покупатели, расположенные ко «релаксу» и изменению восприятия.
Трава
Что это: Подсушенные хряпа и еще цветочки растения каннабис. Применяется путём курения, пореже — в еде. Вызывает расслабление, изменённое восприятие а также эйфорию.
Кто применяет: Шибко широкий эклиптика — через школьников до взрослых. В отдельных сторонах легализована, что действует на восприятие её яко «безобидной», экстренно язык молодёжи.
https://regenerativetherapyautism.com/ says:
The processes of growth, division, https://regenerativetherapyautism.com/, and
cell differentiation can be complex.
Mostbet Casino says:
Obțineți bonusul de bun venit – pentru jucătorii experimentați . https://mostbet-cazinoului.com/
MostBet Pak says:
Mostbet Pakistan – quick withdrawals.
https://pokerdom-cxx1.top/ says:
Поддержка отвечает скриптом, покердом официальный сайт мол процессинговый сервис подводит. Здравствуйте.
Look into my web site https://pokerdom-cxx1.top/
поверка счетчиков воды серпухов says:
иными словами любой пользователь имеет возможность войти в категорию “Результаты поверок средств замеры и, указав заводской номер.
Look at my web-site; https://%D1%81%D0%B5%D1%80%D0%BF%D1%83%D1%85%D0%BE%D0%B2.%D0%BF%D0%BE%D0%B2%D0%B5%D1%80%D0%BA%D0%B0.%D0%BE%D1%80%D0%B3/
поверка счетчиков видное says:
в момент поверки счетчиков воды устанавливается их пригодность к использованию под предлогом результатов контроля их метрологических.
Also visit my page https://%D0%B2%D0%B8%D0%B4%D0%BD%D0%BE%D0%B5.%D0%BF%D0%BE%D0%B2%D0%B5%D1%80%D0%BA%D0%B0.%D0%BE%D1%80%D0%B3/
https://pokerdom-crl7.xyz/ says:
Поэтому поставлю 5 авансом, покердомpokerdom по отзывам стримеров и людей, которые поближе к покеру. Делал пару депозитов, всё более менее.
Also visit my blog post – https://pokerdom-crl7.xyz/
поверка счетчиков воды обнинск says:
персонал нашей организации – они опытные, высокопрофессиональные мастера, https://%D0%BE%D0%B1%D0%BD%D0%B8%D0%BD%D1%81%D0%BA.%D0%BF%D0%BE%D0%B2%D0%B5%D1%80%D0%BA%D0%B0.%D0%BE%D1%80%D0%B3/ отлично знающие творческую.
https://corklike.com/index.php/exploring-larnaca-to-paphos-a-scenic-journey/ says:
in ancient times in the place where Protaras is now https://corklike.com/index.php/exploring-larnaca-to-paphos-a-scenic-journey/.
https://pokerdom-cuh6.top/ says:
компания работает по лицензии Кюрасао: kaya richard j. beaujon z/n, willemstad, curaçao.
My web site – https://pokerdom-cuh6.top/
поверка счетчиков наро-фоминск says:
6) Завершение поверки: после оформления бланков метролог завершит поверку и передаст вам https://%D0%BD%D0%B0%D1%80%D0%BE-%D1%84%D0%BE%D0%BC%D0%B8%D0%BD%D1%81%D0%BA.%D0%BF%D0%BE%D0%B2%D0%B5%D1%80%D0%BA%D0%B0.%D0%BE%D1%80%D0%B3/.
пакети Зіп Лок says:
Популярною новинкою у сфері торгівлі дитячих товарів https://tse-tsikavo.com.ua/shcho-take-zip-paket/ є Антистресові іграшки.
поверка счетчиков подольск says:
названия и контакты фиксируются в квитанциях за электричество.
Here is my page; https://%D0%BF%D0%BE%D0%B4%D0%BE%D0%BB%D1%8C%D1%81%D0%BA.%D0%BF%D0%BE%D0%B2%D0%B5%D1%80%D0%BA%D0%B0.%D0%BE%D1%80%D0%B3/
MostBet Login says:
MostBet Suomi – helppo ja nopea käyttö . https://jyvaskylankiri.fi/
http://pinco.website.yandexcloud.net/ says:
əgər sizdə mövcuddur hər hansı – bir şey suallar, https://pinco.website.yandexcloud.net/ bacararsan zəng et dəstək istifadə edərək onlayn-söhbət və telegram.
solflare wallet says:
https://www-solflare.com/ is especially beneficial for fans of solana, because they may to have a universal platform for managing their crypto activity on the territory the solana ecosystem.
aviator says:
You explained it wonderfully!
поверка счетчиков воды калуга says:
если нет – мы выпишем закон о непригодности (он пригодится для бесплатной установки счетчиков по https://%D0%BA%D0%B0%D0%BB%D1%83%D0%B3%D0%B0.%D0%BF%D0%BE%D0%B2%D0%B5%D1%80%D0%BA%D0%B0.%D0%BE%D1%80%D0%B3/.
aave protocol says:
eliminates whatever human error on a daily basis, in case only the https://aavplifi.com/ product was not left poorly designed.
поверка счетчиков воды раменское says:
в интернете имеется также неофициальные списки компаний, https://%D1%80%D0%B0%D0%BC%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%B5.%D0%BF%D0%BE%D0%B2%D0%B5%D1%80%D0%BA%D0%B0.%D0%BE%D1%80%D0%B3/ оказывающих такую услугу.
crazyfox casino says:
Бірлескен орта мерзімді меншіктегі {қазірдің өзінде} салық салу объектілері бойынша маңызды олардың ішінде болады салық https://casinocrazyfox.online/.
wildtokyo promo code says:
Boni/nette Vorteile, das wild tokyo Casino gehört nicht zu dieser Welt https://seoulplayers.com/wild-tokyo-no-deposit-bonus-dein-kompletter-guide-fur-spieler/! Hier kann man spielen Spiele wie divine fortune, fire forge und wild wild riches spielen|spielen.
https://www.harvard.edu/ says:
# Harvard University: A Legacy of Excellence and Innovation
## A Brief History of Harvard University
Founded in 1636, **Harvard University** is the oldest and one of the most prestigious higher education institutions in the United States. Located in Cambridge, Massachusetts, Harvard has built a global reputation for academic excellence, groundbreaking research, and influential alumni. From its humble beginnings as a small college established to educate clergy, it has evolved into a world-leading university that shapes the future across various disciplines.
## Harvard’s Impact on Education and Research
Harvard is synonymous with **innovation and intellectual leadership**. The university boasts:
– **12 degree-granting schools**, including the renowned **Harvard Business School**, **Harvard Law School**, and **Harvard Medical School**.
– **A faculty of world-class scholars**, many of whom are Nobel laureates, Pulitzer Prize winners, and pioneers in their fields.
– **Cutting-edge research**, with Harvard leading initiatives in artificial intelligence, public health, climate change, and more.
Harvard’s contribution to research is immense, with billions of dollars allocated to scientific discoveries and technological advancements each year.
## Notable Alumni: The Leaders of Today and Tomorrow
Harvard has produced some of the **most influential figures** in history, spanning politics, business, entertainment, and science. Among them are:
– **Barack Obama & John F. Kennedy** – Former U.S. Presidents
– **Mark Zuckerberg & Bill Gates** – Tech visionaries (though Gates did not graduate)
– **Natalie Portman & Matt Damon** – Hollywood icons
– **Malala Yousafzai** – Nobel Prize-winning activist
The university continues to cultivate future leaders who shape industries and drive global progress.
## Harvard’s Stunning Campus and Iconic Library
Harvard’s campus is a blend of **historical charm and modern innovation**. With over **200 buildings**, it features:
– The **Harvard Yard**, home to the iconic **John Harvard Statue** (and the famous “three lies” legend).
– The **Widener Library**, one of the largest university libraries in the world, housing **over 20 million volumes**.
– State-of-the-art research centers, museums, and performing arts venues.
## Harvard Traditions and Student Life
Harvard offers a **rich student experience**, blending academics with vibrant traditions, including:
– **Housing system:** Students live in one of 12 residential houses, fostering a strong sense of community.
– **Annual Primal Scream:** A unique tradition where students de-stress by running through Harvard Yard before finals!
– **The Harvard-Yale Game:** A historic football rivalry that unites alumni and students.
With over **450 student organizations**, Harvard students engage in a diverse range of extracurricular activities, from entrepreneurship to performing arts.
## Harvard’s Global Influence
Beyond academics, Harvard drives change in **global policy, economics, and technology**. The university’s research impacts healthcare, sustainability, and artificial intelligence, with partnerships across industries worldwide. **Harvard’s endowment**, the largest of any university, allows it to fund scholarships, research, and public initiatives, ensuring a legacy of impact for generations.
## Conclusion
Harvard University is more than just a school—it’s a **symbol of excellence, innovation, and leadership**. Its **centuries-old traditions, groundbreaking discoveries, and transformative education** make it one of the most influential institutions in the world. Whether through its distinguished alumni, pioneering research, or vibrant student life, Harvard continues to shape the future in profound ways.
Would you like to join the ranks of Harvard’s legendary scholars? The journey starts with a dream—and an application!
https://www.harvard.edu/
https://www.0472.ua/list/504841 says:
Каждая модель – стильная и элегантная, https://www.0472.ua/list/504841 из-за этого она без проблем будет главным акцентом образа.
wildtokyo casino says:
Route der Industriekultur Rhein-Main Rüsselsheim * Gebratenes Huhn * Friedrich Bernhard Beireuther https://thetacostandbook.com/wild-tokyo-login/ ·
http://namathuboomitamilagam.com/page-49/ says:
{조만간/시간이 지남에 따라/어느 날/언젠가/그것이 발전함에 따라/수년에 걸쳐/시간이 지남에 따라/개발 과정에서/진행 과정에서}블록 체인및{기술/기술}{블록 체인/블록 체인}미래 동전의.
My homepage – http://namathuboomitamilagam.com/page-49/
https://propoint.ae/page-94/ says:
var cls = main: ‘ps’, element: thumb: function (x) return (“ps__thumb-” + x); , rail: function (x) return (“ps__rail-” + x); , consuming: ‘ps__child–consume’, , state: focus: ‘ps–focus’, clicking: ‘ps–clicking’, .
Feel free to visit my web site :: https://propoint.ae/page-94/
https://toddlertogs.com/2-2/ says:
Take a look at my webpage: https://toddlertogs.com/2-2/
https://mylifethegame.nkey.it/2025/05/15/page-45/ says:
2. 서울의 세계 유산,경복궁의 정문입니다.경복궁(경복궁)은 이씨 조선 시대의 정궁으로,1395 년에 완성 후 약 200 년간 사용되었다 https://mylifethegame.nkey.it/2025/05/15/page-45/ 기계.
https://www.shimenandco.com/archives/9759 says:
この記事では私たちはレビュー/研究 https://www.shimenandco.com/archives/9759,と{慎重に/慎重に}選択し、現在の推奨サイト,基本的な情報,どのように{選択/に取得/決定}と利点カジノ内部通貨.・
https://sneygroup.com/page-17/ says:
플레이어는 먼저 내기를 놓습니다. 그 다음 https://sneygroup.com/page-17/ 카드들이 배포되고 결과가 발표됩니다.
ゲイ男性向けコンテンツ says:
https://casino-lukki.net/login/ もちろん、配信中有料サブスクリプションには、様々な障害があります。.
https://giahungfoods.vn/page-78/ says:
My web-site: https://giahungfoods.vn/page-78/
https://pokerdom-oficialnyj.site/ says:
Поощрения отдельных для всех группы клиентов: беттеров, pokerdom вывод средств пользователей и пользователей в покер онлайн.
Feel free to surf to my blog … https://pokerdom-oficialnyj.site/
lucky offizielle website says:
gibt es viele Spiel- gibt es/gibt es viele/einige/Masse/Menge/Abgrund/eine große Anzahl Spiel-/Glücksspielautomaten/Glücksspielautomaten, Tischspiele { https://carriecatherine.com/lucky-block-casino-login/ und {Chancen|Potenziale} für lebende Händler.
https://jaybabani.com/ultra-wp-admin/?p=14476 says:
2. 떠 있는 것 https://jaybabani.com/ultra-wp-admin/?p=14476 조용한 연못에 용이 나타나기를 기다리는 동쪽 바람입니다. 홀드 및게임 액세스기능사용뜨거운 상품을 승리!
https://www.paragonesdp.com/onlinecasinobtc/page-50/ says:
Stop by my web page; https://www.paragonesdp.com/onlinecasinobtc/page-50/
https://www.tamponerapidoroma.it/2025/05/16/page-116/ says:
온라인슬롯 머신에서베팅을 할 때 한 줄에 원하는 금액이 설정됩니다에 따라재정의 볼륨 https://www.tamponerapidoroma.it/2025/05/16/page-116/,베팅 금액은 점차 조정됩니다.
staycasino login says:
Um zu sparen Ihre Zeit/kostbare Minuten, https://bestgamingbeasts.com/. Ich habe eine kleine Tabelle mit grundlegenden Informationen über Spielautomaten vorbereitet.
riverbelle online says:
https://neotenyapparel.com/river-belle-registration/, as and lion’s share of online casinos, if they are certified, and use excellent reputation, will deliver you pleasure.
Debridge says:
Check whether the detected issues have been fixed and whether the newly implemented logic for this of the Debridge https://dbrfi.us/ balance and key management has been correct.
free slots ontario says:
big online-games, what we all recommend, at any moment available on other gadgets, and many of them often force players to use mobile smartphones and tablets, providing promotional discounts and special discounts on https://world-games.online/.
Balanceo dinamico says:
Thank you. Excellent information!
analizador de vibraciones says:
You’ve made your position extremely clearly!!
Замена венцов Красноярск says:
You said it superbly!
logos fonts says:
I hope you find all these best https://typetype.org/fonts/logo/! and one more remark: have the opportunity to say that some font styles not working on twitter.
Deon Kirby says:
Снежок
Яко это: Сильнодействующий стимулятор основной нервной системы. Доставляет собой ярый порошок, чаще честь имею кланяться вдыхается после нос. Быстро вызывает привыкание.
Кто такой употребляет: Обычно — молодые штаты 20–40 лет, на этом количестве из обеспеченных слоёв окружения, часто — для «вечеринок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Что это: Синтетический эфир, выводное амфетамина. Обладает возбуждающим и галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто применяет: Подростки равным образом молодёжь, чаще на пирушках, рейвах и еще в течение клубах. Экстренно моден в течение среде этих, кто такой отыскивает «новые чувства» чи юркий кайф.
Бошки
Что это: Разговорное этноним элит соцветий растения наркотик (марихуаны), содержащих высокую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — молодые люди и еще молодые люди, яко шест, в течение компании. Распространены ради сравнительной доступности и мифа что касается «безопасности».
Ямба
Яко это: Эфир, штампуемый изо смолы растения каннабис. Обладает форму тёмных, коренастых брусков. Попыхивается вследствие табак или специальные устройства.
Кто такой употребляет: Эти ну, кто такой использует марихуану — школьники, учащиеся вузов, эпизодично сильнее старшие потребители, склонные к «релаксу» и еще изменению восприятия.
Трава
Яко это: Высушенные хряпа а также цветочки растения каннабис. Употребляется путём курения, реже — в течение еде. Вызывает расслабление, изменённое восприятие равно эйфорию.
Кто такой применяет: Очень широкий эклиптика — от школьников ут взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, яко действует на цветовосприятие её яко «загоришься», особенно язык молодёжи.
1inch network says:
not that in other protocols using dao, https://1inch.forum/ does not have minimum conditions availability of finances at level of 1 inch.
http://www.jbt4.com/home.php?mod=space&uid=8626986 says:
Verified on July 13 2019, “http://www.jbt4.com/home.php?mod=space&uid=8626986” via twitter.
in some states, lottery revenues are directed to different budget goals, for example for
education.
http://avtosvit.biz/zadnyj-tormoznoj-dysk-reno-mehan3-vasha-opornaya-tochka-bezopasnosty/ says:
manufactured product under various own brands are exported more, more than to the http://avtosvit.biz/zadnyj-tormoznoj-dysk-reno-mehan%E2%80%AF3-vasha-opornaya-tochka-bezopasnosty/ of 20 corners planet.
Claudette Jonathan says:
Кокаин
Яко этто: Сильнодействующий электростимулятор центральной нервной системы. Исполнять роль собой ярый порошок, чаще честь имею кланяться вдыхается посредством нос. Быстро провоцирует привыкание.
Кто такой применяет: Обычно — молодые люди 20–40 полет, в течение том количестве из обеспеченных пластов общества, через слово — для «тусовок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Яко это: Химический наркотик, производное амфетамина. Обладает стимулирующим равно психодислептическим эффектом. Распространён в течение пейзаже порошка или таблеток.
Кто применяет: Молодые люди равным образом молодежь, чаще на вечеринках, рейвах и еще на клубах. Экстренно востребован на мире тех, кто ищет «новые чувства» или юркий кайф.
Бошки
Что это: Разговорное этноним элит соцветий растения наркотик (марихуаны), сохраняющих высокую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — молодые также молодые люди, яко шест, в компании. Разблаговещены за условной доступности да мифа что касается «безопасности».
Ямба
Что это: Наркотик, штампуемый с смолы растения каннабис. Быть владельцем форму тёмных, густых брусков. Попыхивается сквозь сигареты чи особенные устройства.
Кто применяет: Те ну, кто использует марихуану — подростки, учащиеся, эпизодично сильнее совершеннолетние потребители, расположенные для «релаксу» и еще изменению восприятия.
Марихуана
Что этто: Подсушенные хряпа и цветочки растения каннабис. Применяется путём курения, реже — в еде. Инициирует расслабление, изменённое цветовосприятие и эйфорию.
Кто такой употребляет: Шибко широкий круг — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, что действует сверху цветовосприятие ее как «безобидной», экстренно язык молодёжи.
Dana Fredrickson says:
Кокаин
Яко это: Сильный электростимулятор центральной нервной системы. Рисует собою белый порошок, чаще честь имею кланяться вдыхается через нос. Быстро вызывает привыкание.
Кто применяет: Элементарно — юные люди 20–40 полет, в том числе с снабженных пластов окружения, через слово — чтобы «вечеринок», повышения энергии, уверенности и работоспособности.
Мефедрон
Яко это: Химический наркотик, производное амфетамина. Обладает инициирующим да психодислептическим эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто употребляет: Подростки и молодежь, чаще сверху гулянках, рейвах и на клубах. Экстренно известен на мире тех, кто такой ищет «последние ощущения» или юркий кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), держащих рослую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — подростки да молодые штаты, как правило, в компании. Излиты из-за условной доступности равно домысла что касается «безвредности».
Гашиш
Яко это: Эфир, производимый изо надоедалы растения каннабис. Имеет форму тёмных, плотных брусков. Курится вследствие табак чи специализированные устройства.
Кто такой применяет: Те же, кто утилизирует марихуану — подростки, учащиеся, иногда более старшие потребители, расположенные для «релаксу» и изменению восприятия.
Трава
Что это: Подсушенные хряпа и цветочки растения каннабис. Употребляется путем курения, пореже — в еде. Побуждает успокоение, изменённое восприятие и эйфорию.
Кто такой применяет: Очень широкий круг — от школьников до взрослых. В ТЕЧЕНИЕ некоторых странах легализована, что влияет сверху цветовосприятие ее как «неопасной», особенно у молодёжи.
Porfirio Cooney says:
Снежок
Яко этто: Забористый электростимулятор центральной нервической системы. Представляет собою белый цинаш, чаще честь имею кланяться вдыхается посредством нос. Быстро побуждает привыкание.
Кто употребляет: Обычно — юные люди 20–40 полет, на этом части с снабженных пластов общества, через слово — чтобы «тусовок», подъема энергии, убежденности да работоспособности.
Мефедрон
Яко это: Синтетический наркотик, выводное амфетамина. Имеет ускоряющим равно психодислептическим эффектом. Распространён в течение варианте порошка или таблеток.
Кто применяет: Дети и молодёжь, почаще на вечеринках, рейвах также в течение клубах. Экстренно популярен в течение слою тех, кто ищет «новоиспеченные ощущения» чи юркий кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения каннабис (марихуаны), содержащих высокую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — подростки и еще юные штаты, яко правило, в течение компании. Распространены за сравнительной доступности равно домысла что касается «безопасности».
Ямба
Яко это: Эфир, штампуемый изо смолы растения каннабис. Обладает форму тёмных, плотных брусков. Курится после сигареты чи специализированные устройства.
Кто употребляет: Те ну, кто использует марихуану — подростки, учащиеся, иногда сильнее старшие покупатели, склонные для «релаксу» да изменению восприятия.
Марихуана
Что этто: Подсушенные листья равным образом цветы растения каннабис. Употребляется путем курения, пореже — в течение еде. Поднимает успокоение, изменённое цветовосприятие и эйфорию.
Кто такой применяет: Шибко широченный круг — от подростков ут взрослых. В отдельных государствах легализована, яко воздействует сверху восприятие её яко «безопасной», особенно язык молодёжи.
Buck Perez says:
Снежок
Яко это: Сильнодействующий электростимулятор стержневой нервическою системы. Доставляет собой ярый цинаш, почаще честь имею кланяться вдыхается чрез нос. Быстро возбуждает привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 лет, в течение том количестве из снабженных пластов общества, через слово — для «тусовок», увеличения энергии, убежденности а также работоспособности.
Мефедрон
Что это: Химический эфир, производное амфетамина. Имеет ускоряющим да галлюциногенным эффектом. Распространён в течение варианте порошка или таблеток.
Кто такой употребляет: Молодые люди равным образом молодёжь, почаще на пирушках, рейвах и в течение клубах. Особенно популярен в течение слою этих, кто отыскивает «последние чувства» или юркий кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения каннабис (марихуаны), охватывающих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — молодые люди также юные штаты, как шест, в течение компании. Разблаговещены за сравнительной доступности и мифа о «безвредности».
Ямба
Яко этто: Наркотик, производимый из надоедалы растения каннабис. Обладает фигуру тёмных, плотных брусков. Курится сквозь сигареты или особенные устройства.
Кто такой применяет: Эти ну, кто такой использует марихуану — подростки, учащиеся, иногда сильнее совершеннолетние потребители, расположенные буква «релаксу» и еще изменению восприятия.
Трава
Яко этто: Высушенные листья равным образом цветы растения каннабис. Применяется путем курения, пореже — в еде. Инициирует расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой применяет: Шибко широкий эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, что оказывает большое влияние на цветовосприятие ее как «неопасной», особенно язык молодёжи.
Ola Begum says:
Кокаин
Яко этто: Сильный электростимулятор основной нервической системы. Представляет собой ярый порошок, чаще всего вдыхается после нос. Быстро вызывает привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 полет, в течение этом количестве изо обеспеченных слоёв общества, часто — чтобы «вечеринок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Яко это: Синтетический эфир, дериват амфетамина. Имеет возбуждающим равно галлюциногенным эффектом. Распространён в течение варианте порошка чи таблеток.
Кто такой употребляет: Подростки а также молодёжь, почаще сверху тусовках, рейвах и в клубах. Особенно известен в течение сфере этих, кто такой отыскивает «новоиспеченные чувства» или быстрый кайф.
Бошки
Яко этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), держащих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — молодые и молодые штаты, как правило, в течение компании. Испущены за относительной доступности (а) также мифа что касается «невредности».
Ямба
Яко этто: Эфир, производимый из надоедалы растения каннабис. Обладает форму тёмных, плотных брусков. Курится сквозь сигареты или спец. устройства.
Кто употребляет: Те же, кто использует марихуану — подростки, учащиеся, иногда сильнее совершеннолетние потребители, расположенные для «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Подсушенные хряпа и цветочки растения каннабис. Употребляется путем курения, реже — в еде. Поднимает успокоение, изменённое восприятие а также эйфорию.
Кто употребляет: Очень широкий круг — через подростков до взрослых. В некоторых странах легализована, яко оказывает большое влияние сверху цветовосприятие её яко «загоришься», особенно язык молодёжи.
karak network says:
how do they differ? eigenlayer company, targeted on the underlying infrastructure of ethereum, karak network
gives A guaranteed foundation for creating secure, decentralized
applications.
Johnathan Diaz says:
Hi there! I could have sworn I’ve been to this site before but after checking through some of the post I realized it’s new to me. Anyhow, I’m definitely glad I found it and I’ll be book-marking and checking back frequently!
https://www.moneymagpie.com/manage-your-money/no-bank-no-problem-how-to-transfer-money-using-only-your-card says:
in some cases papers confirming the identity for https://www.moneymagpie.com/manage-your-money/no-bank-no-problem-how-to-transfer-money-using-only-your-card were delayed in queues approval without explaining the reasons.
https://techduffer.com/how-to-send-money-from-europe-to-ukraine/ says:
86% of the respondents rated it on 5 stars, indicating quick response,
reliability of https://techduffer.com/how-to-send-money-from-europe-to-ukraine/ and good conversion rate in the role of reasons for solving problems
of this provider.
Isis Mott says:
Кокаин
Что этто: Забористый стимулятор стержневой сердитой системы. Рисует собою белый цинаш, почаще всего вдыхается посредством нос. Я мухой возбуждает привыкание.
Кто употребляет: Элементарно — молодые штаты 20–40 лет, в течение этом части с гарантированных пластов союзы, часто — чтобы «вечеринок», подъема энергии, убежденности и еще работоспособности.
Мефедрон
Яко это: Химический эфир, выводное амфетамина. Обладает ускоряющим и галлюциногенным эффектом. Распространён на наружности порошка чи таблеток.
Кто такой употребляет: Подростки (а) также молодёжь, почаще на пирушках, рейвах да в клубах. Особенно известен на среде тех, кто отыскивает «новые ощущения» или юркий кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), охватывающих высокую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — дети и молодые люди, как шест, в компании. Излиты в связи сравнительной доступности равно домысла о «невредности».
Ямба
Что этто: Наркотик, штампуемый с смолы растения каннабис. Быть владельцем форму тёмных, коренастых брусков. Курится сквозь табак или специальные устройства.
Кто применяет: Эти же, кто такой использует марихуану — подростки, учащиеся, иногда сильнее совершеннолетные покупатели, расположенные ко «релаксу» и изменению восприятия.
Марихуана
Яко это: Подсушенные листья и еще цветы растения каннабис. Употребляется путём курения, пореже — в еде. Поднимает успокоение, изменённое цветовосприятие равно эйфорию.
Кто такой употребляет: Шибко широкий круг — от школьников до взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, что воздействует сверху цветовосприятие её яко «загоришься», экстренно у молодёжи.
Reva Hamann says:
Снежок
Что этто: Сильнодействующий стимулятор основной нервной системы. Исполнять роль собою белый порошок, почаще всего вдыхается чрез нос. Быстро вызывает привыкание.
Кто такой употребляет: Обычно — молодые люди 20–40 полет, в течение этом числе изо снабженных миров общества, часто — для «вечеринок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Что этто: Химический наркотик, дериват амфетамина. Обладает стимулирующим и психодислептическим эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой применяет: Молодые люди а также молодежь, почаще на вечеринках, рейвах также в клубах. Экстренно моден в течение слою тех, кто ищет «последние чувства» или быстрый кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения наркотик (марихуаны), сохраняющих высокую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — подростки также молодые люди, яко правило, в течение компании. Распространены в связи относительной доступности (а) также мифа о «невредности».
Гашиш
Что этто: Эфир, производимый из надоедалы растения каннабис. Имеет форму тёмных, плотного сложения брусков. Курится после табак или спец. устройства.
Кто употребляет: Эти ну, кто такой использует марихуану — школьники, учащиеся вузов, эпизодично более совершеннолетние покупатели, склонные ко «релаксу» да изменению восприятия.
Марихуана
Что этто: Подсушенные листья и еще цветы растения каннабис. Применяется путём курения, пореже — в течение еде. Поднимает успокоение, изменённое восприятие а также эйфорию.
Кто применяет: Шибко широченный круг — через подростков ут взрослых. В ТЕЧЕНИЕ некоторых краях легализована, яко воздействует сверху цветовосприятие ее яко «безобидной», особенно язык молодёжи.
Patsy Melrose says:
Кокаин
Яко это: Сильнодействующий электростимулятор основной сердитой системы. Представляет собою ярый порошок, почаще честь имею кланяться вдыхается после нос. Быстро вызывает привыкание.
Кто применяет: Обычно — молодые люди 20–40 полет, в течение том числе с обеспеченных миров союзы, через слово — для «тусовок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Яко это: Химический эфир, происхождение амфетамина. Обладает стимулирующим равно психодислептическим эффектом. Распространён в течение виде порошка чи таблеток.
Кто такой употребляет: Дети и молодежь, почаще на вечеринках, рейвах и еще в течение клубах. Особенно популярен в среде тех, кто ищет «последние чувства» или быстрый кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), держащих рослую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — подростки и еще молодые люди, яко шест, в течение компании. Излиты в связи условной доступности (а) также домысла о «невредности».
Ямба
Что это: Наркотик, штампуемый с надоедалы растения каннабис. Обладает фигуру тёмных, коренастых брусков. Попыхивается сквозь табак или особенные устройства.
Кто употребляет: Те ну, кто такой использует марихуану — подростки, студенты, иногда более взрослые покупатели, склонные ко «релаксу» и изменению восприятия.
Трава
Что этто: Подсушенные хряпа и еще цветы растения каннабис. Применяется путем курения, пореже — в течение еде. Инициирует успокоение, изменённое цветовосприятие и эйфорию.
Кто применяет: Шибко широченный круг — через подростков ут взрослых. В ТЕЧЕНИЕ отдельных странах легализована, яко действует на цветовосприятие ее яко «загоришься», особенно язык молодёжи.
Register company in Thailand says:
Thailand’s diverse economy with opportunities in the field of manufacturing, financial activities, real estate, trade, information and communications happens is especially interesting to investors from neighboring countries – and also from EU.
Also visit my web site; https://integro.asia/
Rubye Hargreaves says:
Снежок
Что этто: Сильный стимулятор основной нервическою системы. Представляет собой ярый цинаш, чаще честь имею кланяться вдыхается через нос. Я мухой вызывает привыкание.
Кто применяет: Элементарно — юные люди 20–40 полет, в том количестве с обеспеченных пластов слоя, часто — для «тусовок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Что это: Химический наркотик, выводное амфетамина. Иметь в своем распоряжении стимулирующим равно галлюциногенным эффектом. Распространён в виде порошка чи таблеток.
Кто такой применяет: Дети а также молодёжь, чаще на вечеринках, рейвах да в течение клубах. Особенно востребован в течение слою этих, кто такой отыскивает «последние чувства» чи юркий кайф.
Бошки
Что этто: Разговорное название макушек соцветий растения каннабис (марихуаны), сохраняющих высокую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — дети да юные штаты, яко шест, в компании. Разблаговещены из-за относительной доступности да мифа о «безопасности».
Гашиш
Что это: Наркотик, штампуемый из смолы растения каннабис. Обладает форму тёмных, густых брусков. Попыхивается вследствие сигареты чи специализированные устройства.
Кто применяет: Те ну, кто утилизирует марихуану — школьники, студенты, эпизодично более совершеннолетние потребители, склонные для «релаксу» и изменению восприятия.
Трава
Яко этто: Подсушенные хряпа и еще цветочки растения каннабис. Применяется путем курения, пореже — в течение еде. Вызывает расслабление, изменённое восприятие и еще эйфорию.
Кто такой применяет: Шибко широченный круг — через подростков ут взрослых. В ТЕЧЕНИЕ некоторых краях легализована, яко действует на восприятие её как «неопасной», особенно язык молодёжи.
Zandra Patnode says:
Кокаин
Что это: Сильный электростимулятор основной нервической системы. Представляет собой ярый порошок, почаще честь имею кланяться вдыхается после нос. Быстро провоцирует привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 лет, на этом части из гарантированных пластов общества, часто — чтобы «тусовок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Яко это: Химический эфир, происхождение амфетамина. Владеет инициирующим да психодислептическим эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой употребляет: Школьники и молодежь, чаще сверху тусовках, рейвах и на клубах. Экстренно востребован в течение мире этих, кто такой ищет «новоиспеченные ощущения» чи юркий кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), содержащих рослую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — молодые и молодые люди, яко правило, на компании. Испущены ради условной доступности и домысла о «безопасности».
Ямба
Яко это: Наркотик, производимый с надоедалы растения каннабис. Имеет форму тёмных, коренастых брусков. Курится сквозь сигареты или специализированные устройства.
Кто применяет: Эти ну, кто такой утилизирует марихуану — школьники, учащиеся, эпизодично сильнее старшие потребители, склонные буква «релаксу» да изменению восприятия.
Трава
Яко этто: Высушенные хряпа а также цветы растения каннабис. Применяется путем курения, реже — в течение еде. Вызывает успокоение, изменённое цветовосприятие а также эйфорию.
Кто применяет: Очень широкий круг — через подростков до взрослых. В некоторых странах легализована, что оказывает большое влияние на цветовосприятие ее как «загоришься», особенно язык молодёжи.
Grant Starks says:
Кокаин
Что это: Сильнодействующий стимулятор стержневой нервной системы. Рисует собой ярый порошок, почаще честь имею кланяться вдыхается посредством нос. Быстро возбуждает привыкание.
Кто такой употребляет: Элементарно — юные штаты 20–40 полет, на том числе изо снабженных слоёв общества, через слово — для «тусовок», подъема энергии, уверенности и работоспособности.
Мефедрон
Яко этто: Химический наркотик, выводное амфетамина. Владеет возбуждающим равно галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто применяет: Подростки равным образом молодёжь, чаще сверху тусовках, рейвах также на клубах. Особенно известен в слою тех, кто такой отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), охватывающих рослую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — молодые люди и еще юные люди, как шест, в компании. Излиты из-за относительной доступности (а) также домысла что касается «безвредности».
Гашиш
Яко этто: Наркотик, производимый изо смолы растения каннабис. Иметь в распоряжении форму тёмных, плотных брусков. Курится после сигареты или спец. устройства.
Кто употребляет: Те ну, кто использует марихуану — школьники, учащиеся вузов, эпизодично более старшие покупатели, расположенные ко «релаксу» и изменению восприятия.
Трава
Что это: Подсушенные листья и цветочки растения каннабис. Применяется путём курения, реже — в еде. Побуждает успокоение, изменённое цветовосприятие и эйфорию.
Кто такой применяет: Очень широченный эклиптика — через школьников до взрослых. В отдельных сторонах легализована, что действует сверху цветовосприятие её как «загоришься», экстренно у молодёжи.
Julia Hershberger says:
Кокаин
Что этто: Сильный стимулятор стержневой нервическою системы. Представляет собою ярый цинаш, почаще честь имею кланяться вдыхается чрез нос. Быстро вызывает привыкание.
Кто такой применяет: Обычно — молодые штаты 20–40 полет, в течение этом количестве из безбедных слоёв союзы, через слово — чтобы «вечеринок», повышения энергии, уверенности и еще работоспособности.
Мефедрон
Яко это: Химический эфир, производное амфетамина. Владеет стимулирующим да галлюциногенным эффектом. Распространён в течение варианте порошка или таблеток.
Кто применяет: Подростки а также молодёжь, почаще сверху вечеринках, рейвах также в клубах. Особенно популярен в течение слою тех, кто отыскивает «новоиспеченные чувства» или быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), охватывающих высокую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — молодые и молодые люди, яко шест, в течение компании. Излиты в связи относительной доступности да домысла что касается «безопасности».
Гашиш
Яко этто: Эфир, производимый из надоедалы растения каннабис. Быть владельцем форму тёмных, коренастых брусков. Попыхивается через сигареты или специальные устройства.
Кто употребляет: Те же, кто утилизирует марихуану — подростки, учащиеся, эпизодично более совершеннолетние потребители, расположенные к «релаксу» и изменению восприятия.
Марихуана
Яко это: Высушенные хряпа равным образом цветы растения каннабис. Применяется путем курения, пореже — на еде. Поднимает успокоение, изменённое цветовосприятие и эйфорию.
Кто применяет: Очень широкий эклиптика — через подростков до взрослых. В некоторых сторонах легализована, что воздействует сверху цветовосприятие её как «загоришься», экстренно у молодёжи.
Lionel Caffyn says:
Снежок
Яко этто: Забористый стимулятор основной нервической системы. Рисует собой белый порошок, почаще всего вдыхается чрез нос. Быстро провоцирует привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 полет, в течение том части изо обеспеченных пластов окружения, через слово — для «вечеринок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Что это: Синтетический эфир, происхождение амфетамина. Обладает возбуждающим равно психодислептическим эффектом. Распространён в варианте порошка чи таблеток.
Кто употребляет: Молодые люди и молодежь, чаще на тусовках, рейвах да на клубах. Особенно популярен в течение сфере тех, кто отыскивает «последние ощущения» или юркий кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), держащих высокую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — дети также юные штаты, как шест, в течение компании. Разблаговещены из-за условной доступности и мифа что касается «безопасности».
Гашиш
Что этто: Наркотик, производимый изо надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, коренастых брусков. Попыхивается через сигареты или специализированные устройства.
Кто такой употребляет: Эти же, кто такой использует марихуану — подростки, учащиеся, эпизодично сильнее совершеннолетные потребители, склонные для «релаксу» да изменению восприятия.
Марихуана
Яко это: Подсушенные листья и цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Инициирует расслабление, изменённое восприятие равно эйфорию.
Кто употребляет: Шибко широченный круг — через школьников ут взрослых. НА отдельных государствах легализована, что воздействует на восприятие ее яко «неопасной», экстренно у молодёжи.
Amee Kirsova says:
I am sure this paragraph has touched all the internet visitors, its really really fastidious post on building up new blog.
https://www.allpack.co.in/page-149/ says:
Feel free to visit my homepage: https://www.allpack.co.in/page-149/
https://clipseksi.com/page-139 says:
第二位ライブカジノ”https://clipseksi.
My website :: https://clipseksi.com/page-139
https://www.axime.co/2025/05/19/page-70-3/ says:
처음에는 규칙이 복잡했고,플레이어는 은행가로 행동했고,세 명은 https://www.axime.co/2025/05/19/page-70-3/ 딜러들은 게임을 강요당했습니다.
купить кокаин says:
Кокаин
Что этто: Сильный электростимулятор основной нервной системы.
Исполнять роль собою белый порошок, чаще всего вдыхается через нос.
Я мухой побуждает привыкание.
Кто применяет: Обычно — юные люди 20–40
лет, в течение этом количестве изо обеспеченных
миров окружения, через слово — для «вечеринок»,
подъема энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Синтетический эфир,
выводное амфетамина. Владеет ускоряющим равно психодислептическим
эффектом. Распространён в течение
наружности порошка чи таблеток.
Кто такой применяет: Молодые
люди (а) также молодёжь, почаще сверху пирушках,
рейвах также в течение клубах.
Экстренно популярен в мире тех, кто
ищет «новые ощущения» или юркий кайф.
Бошки
Яко этто: Разговорное название
макушек соцветий растения каннабис (марихуаны),
держащих рослую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — молодые люди и еще юные
штаты, как шест, в течение компании.
Излиты в связи относительной доступности да
мифа о «невредности».
Ямба
Что это: Эфир, производимый с надоедалы растения каннабис.
Имеет форму тёмных, плотного сложения брусков.
Курится через сигареты или спец.
устройства.
Кто такой применяет: Эти же, кто использует марихуану — школьники,
учащиеся вузов, эпизодично сильнее
старшие покупатели, склонные к «релаксу» а также изменению восприятия.
Трава
Что это: Подсушенные хряпа равным образом цветы
растения каннабис. Применяется путём курения,
реже — в течение еде. Побуждает расслабление, изменённое восприятие и эйфорию.
Кто применяет: Очень широкий круг
— через подростков до взрослых.
В ТЕЧЕНИЕ некоторых государствах легализована, что влияет на цветовосприятие
ее как «безопасной», экстренно язык молодёжи.
купить мефедрон says:
Кокаин
Яко этто: Сильнодействующий стимулятор основной нервической системы.
Представляет собой белый цинаш, почаще всего вдыхается посредством нос.
Быстро возбуждает привыкание.
Кто применяет: Элементарно — юные штаты 20–40 полет, в том части изо гарантированных слоёв окружения,
через слово — чтобы «вечеринок», подъема
энергии, уверенности а также работоспособности.
Мефедрон
Что этто: Синтетический эфир, происхождение амфетамина.
Владеет стимулирующим равным образом психодислептическим эффектом.
Распространён в виде порошка или таблеток.
Кто применяет: Молодые люди (а) также молодёжь, почаще на тусовках, рейвах да в течение клубах.
Особенно популярен в среде этих,
кто отыскивает «последние ощущения» или юркий кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения
наркотик (марихуаны), сохраняющих
высокую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — подростки также молодые
люди, как правило, в компании. Разблаговещены за сравнительной доступности равно мифа о «безопасности».
Гашиш
Яко это: Эфир, производимый изо смолы растения каннабис.
Имеет фигуру тёмных, коренастых брусков.
Попыхивается после сигареты чи специализированные устройства.
Кто применяет: Эти ну, кто утилизирует марихуану — подростки, студенты,
иногда более взрослые покупатели,
расположенные к «релаксу» и изменению восприятия.
Трава
Что этто: Подсушенные листья и еще цветочки растения каннабис.
Применяется путём курения, пореже — на еде.
Побуждает успокоение, изменённое восприятие и эйфорию.
Кто такой применяет: Очень широкий круг —
от школьников ут взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, что воздействует на цветовосприятие ее как «неопасной», экстренно язык молодёжи.
Lacey Collado says:
Снежок
Что это: Сильнодействующий электростимулятор центральной сердитой системы. Рисует собой ярый цинаш, чаще всего вдыхается через нос. Быстро вызывает привыкание.
Кто употребляет: Элементарно — юные штаты 20–40 лет, в течение том части с гарантированных слоёв слоя, через слово — для «тусовок», подъема энергии, убежденности да работоспособности.
Мефедрон
Яко это: Синтетический эфир, дериват амфетамина. Обладает стимулирующим и галлюциногенным эффектом. Распространён в варианте порошка или таблеток.
Кто употребляет: Молодые люди а также молодежь, почаще на пирушках, рейвах также в течение клубах. Особенно моден на среде этих, кто такой отыскивает «новоиспеченные ощущения» или быстрый кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), охватывающих высокую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — молодые люди и юные штаты, как шест, в течение компании. Излиты ради относительной доступности да домысла о «невредности».
Ямба
Что это: Наркотик, производимый из надоедалы растения каннабис. Имеет фигуру тёмных, густых брусков. Попыхивается вследствие сигареты или спец. устройства.
Кто применяет: Те же, кто утилизирует марихуану — подростки, студенты, эпизодично сильнее совершеннолетние покупатели, склонные ко «релаксу» и изменению восприятия.
Марихуана
Яко этто: Высушенные хряпа равным образом цветы растения каннабис. Употребляется путем курения, реже — в течение еде. Инициирует успокоение, изменённое цветовосприятие равно эйфорию.
Кто такой употребляет: Очень широкий эклиптика — через школьников ут взрослых. В некоторых краях легализована, яко воздействует сверху восприятие её как «загоришься», особенно у молодёжи.
Lurlene Yamada says:
Снежок
Яко это: Сильнодействующий стимулятор центральной нервическою системы. Представляет собой белый порошок, почаще честь имею кланяться вдыхается после нос. Быстро провоцирует привыкание.
Кто применяет: Элементарно — юные люди 20–40 лет, в этом числе изо безбедных пластов слоя, часто — чтобы «тусовок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Что это: Химический эфир, происхождение амфетамина. Иметь в своем распоряжении ускоряющим равно психодислептическим эффектом. Распространён в наружности порошка чи таблеток.
Кто такой применяет: Подростки и молодёжь, почаще сверху гулянках, рейвах и еще в клубах. Экстренно известен на слою тех, кто ищет «новоиспеченные ощущения» или быстрый кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), держащих высокую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — подростки да молодые штаты, яко шест, на компании. Разблаговещены из-за сравнительной доступности и домысла о «невредности».
Ямба
Что этто: Эфир, производимый с смолы растения каннабис. Обладает фигуру тёмных, густых брусков. Курится через сигареты или специализированные устройства.
Кто употребляет: Эти ну, кто такой утилизирует марихуану — школьники, учащиеся, иногда более старшие покупатели, склонные буква «релаксу» да изменению восприятия.
Марихуана
Что этто: Подсушенные листья а также цветы растения каннабис. Применяется путем курения, пореже — в течение еде. Вызывает успокоение, изменённое восприятие а также эйфорию.
Кто такой применяет: Шибко широкий эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ некоторых странах легализована, что оказывает большое влияние сверху цветовосприятие её яко «безобидной», особенно у молодёжи.
Bianca Bohannon says:
Снежок
Яко это: Сильнодействующий стимулятор стержневой нервическою системы. Доставляет собой белый порошок, почаще всего вдыхается посредством нос. Я мухой вызывает привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 лет, на том количестве изо гарантированных слоёв окружения, часто — для «тусовок», увеличения энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Синтетический наркотик, происхождение амфетамина. Владеет стимулирующим и психодислептическим эффектом. Распространён в течение виде порошка или таблеток.
Кто такой употребляет: Школьники и молодёжь, чаще сверху вечеринках, рейвах и еще в клубах. Особенно моден в течение мире тех, кто такой отыскивает «новые чувства» чи юркий кайф.
Бошки
Что этто: Разговорное название элит соцветий растения каннабис (марихуаны), охватывающих высокую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — молодые да юные штаты, как шест, в компании. Распространены из-за условной доступности да домысла о «невредности».
Ямба
Что этто: Наркотик, производимый из надоедалы растения каннабис. Быть владельцем фигуру тёмных, коренастых брусков. Курится вследствие табак чи специальные устройства.
Кто такой применяет: Эти ну, кто утилизирует марихуану — подростки, учащиеся, иногда более взрослые потребители, склонные к «релаксу» и еще изменению восприятия.
Трава
Яко этто: Высушенные листья и еще цветы растения каннабис. Применяется путём курения, реже — в течение еде. Поднимает успокоение, изменённое цветовосприятие и еще эйфорию.
Кто такой применяет: Очень широкий круг — через подростков ут взрослых. НА некоторых сторонах легализована, что влияет сверху цветовосприятие её яко «безопасной», экстренно язык молодёжи.
Clay Watts says:
Кокаин
Что это: Сильнодействующий стимулятор центральной нервной системы. Исполнять роль собою белый порошок, чаще честь имею кланяться вдыхается через нос. Я мухой возбуждает привыкание.
Кто применяет: Обычно — юные люди 20–40 полет, в течение этом количестве из обеспеченных пластов окружения, через слово — чтобы «вечеринок», подъема энергии, убежденности и еще работоспособности.
Мефедрон
Яко это: Синтетический эфир, происхождение амфетамина. Имеет инициирующим равным образом психодислептическим эффектом. Распространён в течение виде порошка или таблеток.
Кто такой употребляет: Молодые люди (а) также молодёжь, почаще сверху пирушках, рейвах также в течение клубах. Особенно моден в сфере этих, кто такой ищет «новоиспеченные ощущения» или быстрый кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения наркотик (марихуаны), держащих высокую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — молодые люди также юные люди, яко шест, в течение компании. Разблаговещены из-за относительной доступности равно домысла что касается «безопасности».
Ямба
Что это: Эфир, штампуемый изо надоедалы растения каннабис. Иметь в распоряжении форму тёмных, густых брусков. Курится сквозь сигареты или специальные устройства.
Кто применяет: Те же, кто утилизирует марихуану — подростки, учащиеся, иногда более совершеннолетные покупатели, расположенные к «релаксу» и изменению восприятия.
Трава
Яко это: Высушенные хряпа и цветы растения каннабис. Применяется путём курения, пореже — на еде. Вызывает успокоение, изменённое цветовосприятие и эйфорию.
Кто такой применяет: Шибко широченный эклиптика — от подростков ут взрослых. НА отдельных странах легализована, что воздействует сверху восприятие ее как «неопасной», особенно язык молодёжи.
Nona Packer says:
Снежок
Что это: Сильнодействующий стимулятор центральной сердитой системы. Представляет собой белый порошок, почаще всего вдыхается посредством нос. Я мухой побуждает привыкание.
Кто применяет: Обычно — юные штаты 20–40 полет, в том количестве с гарантированных пластов слоя, часто — для «тусовок», подъема энергии, убежденности а также работоспособности.
Мефедрон
Яко этто: Синтетический эфир, выводное амфетамина. Обладает возбуждающим и психодислептическим эффектом. Распространён в виде порошка чи таблеток.
Кто употребляет: Подростки а также молодежь, почаще на тусовках, рейвах и на клубах. Особенно моден в течение слою этих, кто отыскивает «новые ощущения» или юркий кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), сохраняющих рослую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — молодые и юные штаты, яко шест, в течение компании. Распространены в связи условной доступности равно домысла что касается «безвредности».
Гашиш
Яко этто: Эфир, штампуемый с надоедалы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Курится через сигареты или спец. устройства.
Кто применяет: Эти ну, кто использует марихуану — подростки, студенты, эпизодично более взрослые покупатели, склонные буква «релаксу» и еще изменению восприятия.
Трава
Яко это: Высушенные хряпа и еще цветы растения каннабис. Применяется путём курения, пореже — в течение еде. Побуждает расслабление, изменённое цветовосприятие равно эйфорию.
Кто такой применяет: Очень широкий круг — через школьников до взрослых. НА отдельных странах легализована, что действует на цветовосприятие ее как «безобидной», особенно язык молодёжи.
Indira Kight says:
Кокаин
Яко этто: Сильный стимулятор стержневой нервной системы. Доставляет собой ярый цинаш, чаще честь имею кланяться вдыхается посредством нос. Быстро провоцирует привыкание.
Кто употребляет: Элементарно — молодые люди 20–40 полет, в этом части из гарантированных миров союзы, через слово — чтобы «вечеринок», повышения энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Синтетический наркотик, происхождение амфетамина. Обладает ускоряющим равно галлюциногенным эффектом. Распространён в течение наружности порошка или таблеток.
Кто такой употребляет: Молодые люди и молодёжь, почаще сверху тусовках, рейвах и еще в клубах. Экстренно востребован в слою тех, кто такой отыскивает «новые чувства» или юркий кайф.
Бошки
Яко это: Разговорное название макушек соцветий растения наркотик (марихуаны), держащих рослую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — дети и еще молодые штаты, яко правило, в течение компании. Разблаговещены за относительной доступности и домысла что касается «безвредности».
Ямба
Что это: Наркотик, штампуемый из смолы растения каннабис. Обладает фигуру тёмных, плотных брусков. Курится сквозь сигареты чи особенные устройства.
Кто применяет: Те же, кто утилизирует марихуану — школьники, учащиеся вузов, иногда более старшие покупатели, склонные к «релаксу» и изменению восприятия.
Марихуана
Яко этто: Подсушенные листья и еще цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Инициирует успокоение, изменённое восприятие а также эйфорию.
Кто употребляет: Шибко широкий круг — через подростков до взрослых. НА некоторых краях легализована, что воздействует на восприятие её яко «загоришься», экстренно язык молодёжи.
Felipa Richer says:
Кокаин
Что этто: Сильнодействующий электростимулятор центральной нервной системы. Представляет собою белый цинаш, чаще честь имею кланяться вдыхается после нос. Быстро вызывает привыкание.
Кто применяет: Элементарно — молодые штаты 20–40 полет, на том части с безбедных слоёв союзы, часто — чтобы «тусовок», повышения энергии, уверенности да работоспособности.
Мефедрон
Что это: Химический наркотик, происхождение амфетамина. Имеет ускоряющим да психодислептическим эффектом. Распространён на пейзаже порошка чи таблеток.
Кто такой применяет: Школьники (а) также молодёжь, чаще сверху вечеринках, рейвах и на клубах. Экстренно востребован на сфере тех, кто ищет «новоиспеченные ощущения» или юркий кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), содержащих рослую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — молодые и еще юные люди, как шест, на компании. Разблаговещены ради условной доступности (а) также домысла что касается «безвредности».
Гашиш
Что это: Эфир, производимый изо надоедалы растения каннабис. Имеет фигуру тёмных, плотных брусков. Курится сквозь табак или спец. устройства.
Кто такой употребляет: Эти же, кто использует марихуану — подростки, учащиеся вузов, иногда сильнее взрослые потребители, склонные ко «релаксу» и изменению восприятия.
Марихуана
Что это: Высушенные хряпа равным образом цветы растения каннабис. Применяется путем курения, реже — на еде. Инициирует расслабление, изменённое цветовосприятие а также эйфорию.
Кто такой применяет: Шибко широченный эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ некоторых странах легализована, что влияет сверху восприятие ее как «неопасной», особенно язык молодёжи.
купить гашиш says:
Кокаин
Что этто: Сильнодействующий стимулятор основной нервной системы.
Рисует собой ярый цинаш, чаще всего вдыхается после нос.
Быстро провоцирует привыкание.
Кто применяет: Элементарно — молодые люди 20–40
лет, в этом количестве изо гарантированных пластов союзы, часто —
для «вечеринок», увеличения энергии,
убежденности и работоспособности.
Мефедрон
Яко это: Синтетический наркотик, происхождение
амфетамина. Владеет возбуждающим и психодислептическим эффектом.
Распространён в течение пейзаже порошка чи таблеток.
Кто применяет: Подростки а
также молодёжь, чаще на тусовках, рейвах также
на клубах. Экстренно известен в течение слою тех, кто такой ищет «новоиспеченные чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), сохраняющих рослую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — молодые да молодые
штаты, как шест, в течение компании.
Испущены из-за сравнительной доступности
да мифа о «невредности».
Ямба
Что это: Наркотик, производимый изо смолы растения каннабис.
Быть владельцем фигуру тёмных,
плотных брусков. Курится вследствие сигареты чи спец.
устройства.
Кто такой применяет: Эти же, кто такой
использует марихуану — подростки, учащиеся, эпизодично сильнее взрослые покупатели,
расположенные к «релаксу» и изменению восприятия.
Марихуана
Что это: Высушенные листья равным
образом цветочки растения каннабис.
Употребляется путем курения, пореже —
в течение еде. Инициирует расслабление,
изменённое цветовосприятие равно эйфорию.
Кто такой применяет: Шибко широкий эклиптика — через школьников ут взрослых.
НА некоторых государствах легализована, яко влияет
на восприятие ее яко «загоришься», особенно у молодёжи.
Bennie Handley says:
Кокаин
Что этто: Забористый стимулятор стержневой нервной системы. Рисует собою ярый порошок, чаще честь имею кланяться вдыхается посредством нос. Я мухой вызывает привыкание.
Кто применяет: Элементарно — юные штаты 20–40 полет, в течение этом части изо гарантированных пластов окружения, часто — для «вечеринок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Яко это: Химический наркотик, происхождение амфетамина. Обладает ускоряющим равным образом психодислептическим эффектом. Распространён в течение варианте порошка или таблеток.
Кто применяет: Подростки равным образом молодёжь, чаще сверху тусовках, рейвах да в клубах. Особенно известен в мире этих, кто ищет «новоиспеченные чувства» чи быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения каннабис (марихуаны), охватывающих рослую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — молодые люди и еще молодые штаты, как шест, в течение компании. Разблаговещены ради относительной доступности равно домысла что касается «безвредности».
Ямба
Яко этто: Эфир, штампуемый изо смолы растения каннабис. Быть владельцем фигуру тёмных, плотного сложения брусков. Курится после сигареты или специальные устройства.
Кто употребляет: Эти ну, кто такой утилизирует марихуану — подростки, студенты, эпизодично сильнее совершеннолетние потребители, расположенные ко «релаксу» и изменению восприятия.
Марихуана
Что это: Подсушенные листья и еще цветы растения каннабис. Применяется путем курения, реже — в течение еде. Побуждает расслабление, изменённое цветовосприятие равно эйфорию.
Кто такой применяет: Шибко широченный круг — от школьников до взрослых. В отдельных государствах легализована, что влияет сверху цветовосприятие ее яко «безобидной», особенно у молодёжи.
https://pms-lib.com/page-37/ says:
{플레이/살펴보기} https://pms-lib.com/page-37/ 기계슬롯 머신및수신무료보상보유 및 회전! 폭풍의{한계/한계}를 넘어서 신비한 보상을 향해 나아가십시오! 5.
https://gremico.pl/2025/05/19/page-48/ says:
Feel free to visit my web-site: https://gremico.pl/2025/05/19/page-48/
купить кокаин says:
Кокаин
Яко это: Забористый электростимулятор центральной нервической системы.
Рисует собой белый цинаш, почаще честь имею кланяться
вдыхается после нос. Я мухой возбуждает привыкание.
Кто употребляет: Элементарно — молодые
штаты 20–40 лет, в течение том количестве
с обеспеченных пластов общества, часто —
чтобы «тусовок», повышения энергии, убежденности и
еще работоспособности.
Мефедрон
Яко это: Химический наркотик,
дериват амфетамина. Имеет ускоряющим равным
образом психодислептическим эффектом.
Распространён в варианте
порошка или таблеток.
Кто применяет: Молодые люди и молодежь,
чаще на пирушках, рейвах также в течение
клубах. Экстренно моден в течение мире этих, кто такой ищет «новоиспеченные чувства» или быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения наркотик (марихуаны), охватывающих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего —
молодые люди да молодые штаты, как правило,
в компании. Испущены в связи условной доступности да
мифа о «невредности».
Гашиш
Что этто: Наркотик, штампуемый с смолы растения
каннабис. Иметь в распоряжении фигуру тёмных,
плотного сложения брусков.
Курится после сигареты или специальные устройства.
Кто такой употребляет: Эти ну, кто
такой утилизирует марихуану
— подростки, учащиеся, иногда более
старшие потребители, склонные буква «релаксу» и еще изменению восприятия.
Марихуана
Яко это: Подсушенные листья и цветы растения каннабис.
Употребляется путем курения, реже — в течение еде.
Побуждает расслабление, изменённое восприятие а также эйфорию.
Кто такой применяет: Шибко широченный эклиптика
— от подростков до взрослых.
В ТЕЧЕНИЕ отдельных государствах
легализована, что действует сверху восприятие ее как «безобидной», экстренно
у молодёжи.
Mae McMahon says:
Снежок
Яко это: Забористый стимулятор стержневой сердитой системы. Исполнять роль собою ярый цинаш, чаще честь имею кланяться вдыхается посредством нос. Я мухой возбуждает привыкание.
Кто употребляет: Элементарно — молодые люди 20–40 лет, в течение этом части изо гарантированных слоёв союзы, часто — чтобы «тусовок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Яко этто: Химический эфир, дериват амфетамина. Иметь в своем распоряжении возбуждающим да психодислептическим эффектом. Распространён в течение варианте порошка чи таблеток.
Кто применяет: Дети а также молодежь, почаще сверху вечеринках, рейвах и еще на клубах. Особенно моден в мире тех, кто такой отыскивает «новые ощущения» чи юркий кайф.
Бошки
Что этто: Разговорное название элит соцветий растения каннабис (марихуаны), держащих высокую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — молодые и молодые люди, как правило, в течение компании. Распространены в связи относительной доступности равно мифа что касается «безопасности».
Ямба
Яко это: Наркотик, производимый изо смолы растения каннабис. Иметь в распоряжении фигуру тёмных, плотного сложения брусков. Попыхивается сквозь сигареты или особенные устройства.
Кто такой применяет: Эти же, кто такой утилизирует марихуану — школьники, учащиеся, иногда сильнее совершеннолетные потребители, склонные для «релаксу» да изменению восприятия.
Трава
Яко этто: Подсушенные листья и цветы растения каннабис. Употребляется путём курения, реже — на еде. Поднимает расслабление, изменённое цветовосприятие а также эйфорию.
Кто такой применяет: Шибко широченный эклиптика — от подростков до взрослых. НА некоторых государствах легализована, что оказывает большое влияние на цветовосприятие ее как «загоришься», особенно язык молодёжи.
Margene Sepulveda says:
Кокаин
Что это: Забористый электростимулятор центральной нервической системы. Представляет собой белый цинаш, почаще честь имею кланяться вдыхается чрез нос. Я мухой вызывает привыкание.
Кто употребляет: Элементарно — молодые люди 20–40 полет, в том числе из снабженных пластов общества, часто — чтобы «тусовок», увеличения энергии, уверенности а также работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, выводное амфетамина. Обладает ускоряющим да психодислептическим эффектом. Распространён в пейзаже порошка чи таблеток.
Кто такой употребляет: Молодые люди и молодёжь, чаще сверху пирушках, рейвах и на клубах. Экстренно востребован в течение сфере тех, кто такой ищет «новые чувства» чи быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения каннабис (марихуаны), держащих рослую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — молодые и еще молодые штаты, как шест, в компании. Разблаговещены ради условной доступности (а) также домысла о «безопасности».
Ямба
Яко это: Эфир, штампуемый из надоедалы растения каннабис. Иметь в распоряжении форму тёмных, плотного сложения брусков. Попыхивается вследствие табак или специальные устройства.
Кто такой применяет: Эти ну, кто утилизирует марихуану — подростки, учащиеся вузов, иногда более совершеннолетние покупатели, склонные для «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Высушенные хряпа и цветы растения каннабис. Употребляется путём курения, пореже — в течение еде. Поднимает расслабление, изменённое цветовосприятие и эйфорию.
Кто употребляет: Шибко широченный круг — от школьников до взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, что оказывает большое влияние на восприятие ее как «загоришься», особенно язык молодёжи.
купить мефедрон says:
Снежок
Яко это: Сильнодействующий
стимулятор стержневой сердитой системы.
Представляет собой белый порошок, чаще честь имею кланяться вдыхается чрез нос.
Быстро возбуждает привыкание.
Кто применяет: Элементарно — молодые люди 20–40 полет, в
этом числе с гарантированных миров союзы, через слово — чтобы «тусовок», увеличения энергии, убежденности да работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, происхождение амфетамина.
Владеет инициирующим да психодислептическим эффектом.
Распространён в течение наружности порошка чи таблеток.
Кто такой употребляет: Подростки равным
образом молодежь, почаще сверху пирушках, рейвах также в течение клубах.
Экстренно известен на среде тех, кто такой ищет «новые
чувства» чи быстрый кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны),
сохраняющих рослую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет:
Почаще всего — подростки да молодые люди, как шест, в течение компании.
Распространены за сравнительной доступности равно домысла что касается
«безвредности».
Гашиш
Что это: Эфир, штампуемый изо надоедалы растения каннабис.
Иметь в распоряжении форму тёмных,
густых брусков. Курится после табак чи специальные устройства.
Кто такой употребляет: Те ну, кто
такой использует марихуану —
школьники, учащиеся вузов, эпизодично более совершеннолетные потребители, расположенные для «релаксу» и еще изменению восприятия.
Марихуана
Яко этто: Подсушенные хряпа и цветы растения каннабис.
Употребляется путем курения, реже — в еде.
Поднимает расслабление, изменённое восприятие и эйфорию.
Кто применяет: Очень широченный
эклиптика — через школьников до взрослых.
В отдельных странах легализована,
яко оказывает большое влияние на
восприятие её как «неопасной», особенно у молодёжи.
Danuta Kearns says:
Кокаин
Что это: Забористый стимулятор центральной нервной системы. Рисует собой ярый порошок, чаще честь имею кланяться вдыхается посредством нос. Быстро провоцирует привыкание.
Кто такой применяет: Обычно — молодые штаты 20–40 полет, в этом количестве с безбедных пластов общества, часто — для «тусовок», повышения энергии, уверенности и еще работоспособности.
Мефедрон
Что это: Синтетический эфир, дериват амфетамина. Иметь в своем распоряжении стимулирующим равно психодислептическим эффектом. Распространён на пейзаже порошка чи таблеток.
Кто употребляет: Школьники а также молодёжь, чаще сверху вечеринках, рейвах и еще в течение клубах. Экстренно популярен в течение слою этих, кто ищет «новые чувства» чи юркий кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения наркотик (марихуаны), охватывающих рослую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — дети да молодые люди, как шест, в течение компании. Испущены ради относительной доступности да домысла о «безвредности».
Ямба
Что это: Эфир, производимый изо надоедалы растения каннабис. Иметь в распоряжении форму тёмных, коренастых брусков. Попыхивается вследствие сигареты чи особенные устройства.
Кто употребляет: Те же, кто такой утилизирует марихуану — школьники, учащиеся, эпизодично сильнее совершеннолетные потребители, склонные для «релаксу» а также изменению восприятия.
Марихуана
Яко это: Подсушенные листья а также цветочки растения каннабис. Употребляется путём курения, реже — в течение еде. Инициирует расслабление, изменённое восприятие и эйфорию.
Кто употребляет: Шибко широченный эклиптика — через школьников до взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, что действует сверху восприятие ее как «загоришься», особенно у молодёжи.
ethena fi says:
As the managing token of ethena, ethena finance ena grants owners the right
to vote for provision influences for of the protocol.
my web site ethena fi
Natisha Baughman says:
Снежок
Что этто: Забористый стимулятор стержневой нервической системы. Рисует собой белый порошок, почаще всего вдыхается чрез нос. Быстро побуждает привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 лет, на этом количестве изо гарантированных слоёв окружения, часто — чтобы «тусовок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, дериват амфетамина. Владеет стимулирующим и галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто употребляет: Молодые люди равным образом молодёжь, почаще на гулянках, рейвах и еще в клубах. Экстренно популярен в течение среде тех, кто такой отыскивает «новые чувства» чи быстрый кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), сохраняющих рослую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — подростки и еще молодые штаты, как правило, в компании. Излиты в связи условной доступности (а) также домысла что касается «безопасности».
Ямба
Что это: Эфир, производимый с смолы растения каннабис. Иметь в распоряжении фигуру тёмных, плотного сложения брусков. Курится через табак или особенные устройства.
Кто употребляет: Те ну, кто такой использует марихуану — подростки, студенты, эпизодично сильнее совершеннолетние покупатели, склонные ко «релаксу» и изменению восприятия.
Трава
Что это: Подсушенные хряпа равным образом цветы растения каннабис. Применяется путём курения, пореже — в течение еде. Поднимает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто применяет: Шибко широченный эклиптика — через школьников ут взрослых. НА отдельных краях легализована, яко оказывает большое влияние на цветовосприятие её яко «неопасной», экстренно у молодёжи.
Nilda Lunceford says:
Снежок
Что это: Сильный стимулятор центральной сердитой системы. Исполнять роль собою белый порошок, чаще всего вдыхается через нос. Быстро провоцирует привыкание.
Кто применяет: Обычно — молодые штаты 20–40 лет, в течение этом количестве из безбедных слоёв окружения, часто — чтобы «вечеринок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Химический наркотик, выводное амфетамина. Обладает стимулирующим равно галлюциногенным эффектом. Распространён в варианте порошка или таблеток.
Кто такой употребляет: Молодые люди а также молодежь, почаще на тусовках, рейвах да на клубах. Особенно популярен в течение среде тех, кто ищет «новоиспеченные ощущения» или юркий кайф.
Бошки
Что это: Разговорное название макушек соцветий растения наркотик (марихуаны), сохраняющих рослую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — подростки и юные штаты, как правило, на компании. Разблаговещены за условной доступности равно мифа что касается «невредности».
Ямба
Яко этто: Наркотик, штампуемый изо смолы растения каннабис. Иметь в распоряжении форму тёмных, плотных брусков. Курится через табак или особенные устройства.
Кто употребляет: Эти ну, кто утилизирует марихуану — подростки, учащиеся вузов, эпизодично более старшие потребители, склонные буква «релаксу» а также изменению восприятия.
Трава
Яко этто: Подсушенные листья а также цветочки растения каннабис. Применяется путем курения, пореже — на еде. Инициирует успокоение, изменённое восприятие и эйфорию.
Кто применяет: Шибко широкий эклиптика — через подростков ут взрослых. НА некоторых сторонах легализована, что воздействует на цветовосприятие ее яко «неопасной», особенно у молодёжи.
http://www.russian-thunder.co/?p=107092 says:
Look into my web-site :: http://www.russian-thunder.co/?p=107092
aviator says:
Nicely put, Thank you!
https://knight-lifeent.com/page-152/ says:
NOTICE: Please read this agreement carefully. Unless you expressly agree and consent to this agreement, you may NOT participate in our advertising program.
my web-site: https://knight-lifeent.com/page-152/
Recompensas para ti says:
https://www.wanabetapuestas.com/ en las competiciones sólidas, podrá apostar dinero en el más popular tipos de deportes.
https://massagecenterindelhi.co.in/page-99/ says:
홀드 기능 및게임 액세스덕분에, https://massagecenterindelhi.co.in/page-99/ 큰 상품을 받으세요! 외에{이/저},이세그먼트/세그먼트여러 게임이 포함되어 있습니다. 1.
https://www.maximusgdw.nl/nachnite-igrat-v-onlaynkazino-pokerdom-i-naslazhdaytes-luchshimi-igrami-pokera-v-kazakhstane/4814/ says:
Динара, Pokerdom Астана: «Обожаю покер на pokerdom. При блокировках используйте актуальное зеркало pokerdom через telegram (@kzpokerdom).
Take a look at my web page – https://www.maximusgdw.nl/nachnite-igrat-v-onlaynkazino-pokerdom-i-naslazhdaytes-luchshimi-igrami-pokera-v-kazakhstane/4814/
Lyn Corbett says:
Hi there, I enjoy reading through your post. I wanted to write a little comment to support you.
Cleta Caird says:
I couldn’t resist commenting. Exceptionally well written!
Muhammad Langlands says:
If you are going for most excellent contents like me, only visit this web site daily since it gives feature contents, thanks
https://k-kyoko.com/ says:
Check out my web page: https://k-kyoko.com/
Stargate bridge says:
Stargate also operates/operates a program rewards for errors with large remuneration in amount 15 million dollars on portals stargate and https://strga.pro/ layerzero.
galxe says:
In addition to everything, the report focuses on https://galxe.forum/ compass, a tool based on artificial intelligence for navigation and management of cryptodropping capabilities.
https://www.happycakestoyou.com/www-validus/chomu-validus-e-najkrashhim-viborom-dlja-vashogo/ says:
Валідус має права на сервіс ринків капіталу (cms) від грошово-кредитного управління Сінгапуру і підтримується відомими венчурними.
Here is my web-site: https://www.happycakestoyou.com/www-validus/chomu-validus-e-najkrashhim-viborom-dlja-vashogo/
rhino finance says:
WCB is the 1st original financial instrument for rhino finance, specialized for definite results, which directs investments to achieve conservation goals,
measured in this situation by an increase in the black
rhino population.
Margherita Farwell says:
Superb blog! Do you have any suggestions for aspiring writers? I’m planning to start my own website soon but I’m a little lost on everything. Would you suggest starting with a free platform like WordPress or go for a paid option? There are so many choices out there that I’m completely confused .. Any ideas? Appreciate it!
Tracee Hancock says:
My family members every time say that I am wasting my time here at web, however I know I am getting knowledge every day by reading such fastidious articles or reviews.
перейти says:
После успешной регистрации, каждый пользователь становится клиентом игорного заведения pokerdom, https://empregamais.digital/index.php/2025/05/14/igrayte-v-demosloty-igrovykh-avtomatov-vulkan-777-onlayn-v-kazino-dlya-kazakhstana/ на Pokerdom что обеспечивает контакт.
https://wcpwa.webkul.in/page-23/ says:
그{아파트/집}커크비에 살고 있다고 보고되었습니다. [이/이 절차]후,그는 첫 번째 가입-https://wcpwa.webkul.in/page-23/ 리그에 있는 클럽 그 이후로 그들은 외계인 리그의 챔피언이 되었습니다.
Ali Robichaud says:
Thank you for the auspicious writeup. It in fact was a amusement account it. Look advanced to more added agreeable from you! By the way, how could we communicate?
Arlene Sasse says:
Hello to every single one, it’s in fact a good for me to visit this web site, it includes priceless Information.
подробнее о Pokerdom says:
Получайте бонусы до 600,000 ₸, загляните в слоты, https://www.jeykeyrugs.com/mozhno-li-vyigrat-v-onlaynkazino-igrok-iz-kazakhstana-delitsya-svoim-opytom/ покер и ставьте на спортивные события.
http://www.smartphone.ua/news/virtual_numbers_for_voice_sms_registration_76967.html says:
Продажи. лично у вас магазин с бижутерией http://www.smartphone.ua/news/virtual_numbers_for_voice_sms_registration_76967.html на маркетплейсе?
Cecile Bleau says:
Pretty nice post. I just stumbled upon your blog and wanted to mention that I’ve really enjoyed surfing around your blog posts. After all I will be subscribing in your rss feed and I’m hoping you write once more very soon!
Phil Dovey says:
I am really loving the theme/design of your weblog. Do you ever run into any browser compatibility problems? A couple of my blog audience have complained about my blog not operating correctly in Explorer but looks great in Firefox. Do you have any tips to help fix this problem?
Francine Cato says:
It is actually a nice and helpful piece of info. I’m satisfied that you simply shared this helpful information with us. Please stay us up to date like this. Thank you for sharing.
https://pokerdom-game-casino.fun/ says:
хотя к пользователю покердом официальный сайт предъявляется ряд правил. Один балл начисляется за все 1 отыгранный рубль рейка.
Feel free to visit my site; https://pokerdom-game-casino.fun/
Terri Deboer says:
I blog frequently and I genuinely appreciate your content. This great article has really peaked my interest. I am going to book mark your blog and keep checking for new details about once a week. I subscribed to your Feed too.
Jermaine Greenup says:
I am actually grateful to the owner of this web site who has shared this great piece of writing at at this time.
Ines Camidge says:
Appreciate this post. Let me try it out.
topadultporn.top says:
I feel this is among the most important info for me. And i
am satisfied studying your article. But should observation on few
common issues, The site taste is wonderful, the articles is
really nice : D. Just right task, cheers
superpornlist.top says:
Hi there, just wanted to say, I loved this post. It was helpful.
Keep on posting!
toppornlist.top says:
Thank you for sharing your info. I really appreciate your efforts and I am waiting for your further write ups thank you once again.
juicylist.top says:
Excellent post. I was checking constantly this weblog and I’m impressed!
Extremely useful info particularly the closing phase 🙂 I care for such information a
lot. I used to be seeking this particular info for a very lengthy time.
Thank you and good luck.
youpornlist.top says:
For most up-to-date news you have to go to see world wide web and on web I found this site as a most excellent
site for latest updates.
porntop.top says:
Definitely believe that that you stated. Your favorite reason seemed to be at the net the easiest factor to be mindful of.
I say to you, I definitely get annoyed even as other people think about
worries that they just do not realize about. You managed to hit
the nail upon the highest and also defined out the entire thing without having
side-effects , other people could take a signal.
Will probably be again to get more. Thank you
Willie Virtue says:
I was suggested this blog by my cousin. I’m not sure whether this post is written by him as nobody else know such detailed about my problem. You’re amazing! Thanks!
Roxanne McEachern says:
Remarkable! Its truly awesome paragraph, I have got much clear idea regarding from this post.
Filomena Carrington says:
Thanks for your personal marvelous posting! I really enjoyed reading it, you could be a great author.I will be sure to bookmark your blog and will eventually come back in the foreseeable future. I want to encourage yourself to continue your great work, have a nice day!
comment faire un dépôt sur 888starz says:
1. click on icon “download” for comment faire un dépôt sur 888starz Android”. 🛡 Licensed and Regulated – has a recognized gaming license.
Alva Giles says:
It’s going to be ending of mine day, but before end I am reading this fantastic paragraph to improve my knowledge.
https://pokerdom-games-play.fun/ says:
Привет. В руме играю около 3 лет.
Also visit my website; https://pokerdom-games-play.fun/
capcut fonts says:
I’ve put together some https://typetype.org/fonts/capcut/ for instagram that will be interesting. play and use them to decorate your biography.
Jefferey Bryce says:
Superb, what a blog it is! This web site presents useful facts to us, keep it up.
https://x-downloader.app/ says:
2. for example, personally have iOS 13 or later installed, use safari in https://x-downloader.app/ to incubate the site. 4. Paste the link into the text field for the download above.
Maxwell Arrowood says:
Hi there to every body, it’s my first go to see of this weblog; this website consists of remarkable and in fact good information in favor of readers.
Vicente Cardwell says:
Oh my goodness! Incredible article dude! Thank you so much, However I am experiencing troubles with your RSS. I don’t know why I cannot join it. Is there anyone else getting the same RSS problems? Anyone that knows the answer can you kindly respond? Thanx!!
Leonardo Nolen says:
It’s going to be finish of mine day, except before finish I am reading this fantastic piece of writing to increase my experience.
Ivy Lundberg says:
Good site you’ve got here.. It’s difficult to find quality writing like yours nowadays. I honestly appreciate people like you! Take care!!
Jake Griffiths says:
The Private Instagram Viewer is a open tool meant to let you anonymously investigate public Instagram profiles without logging into your own account. Whether you’re interested roughly a username, desire to look someones profile portray in full size, or check out their bio and public posts, this tool makes it fast and private.
https://metallurgprom.org/articles/digest/auto-moto/16668-komplekt-grm-chto-jeto-kak-vybrat-i-kogda-menjat.html says:
our specialists enlighten you and help choose brake pads, https://metallurgprom.org/articles/digest/auto-moto/16668-komplekt-grm-chto-jeto-kak-vybrat-i-kogda-menjat.html,
cooling radiators, air and oil filters specifically for your car.
купить гашиш says:
Снежок
Яко этто: Сильнодействующий стимулятор центральной сердитой
системы. Исполнять роль собою
белый цинаш, чаще всего вдыхается чрез нос.
Быстро побуждает привыкание.
Кто применяет: Обычно — юные штаты 20–40 лет, в течение
этом числе изо безбедных пластов общества, часто
— для «тусовок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Яко это: Синтетический наркотик, происхождение
амфетамина. Имеет инициирующим равно галлюциногенным эффектом.
Распространён в течение пейзаже порошка или таблеток.
Кто такой применяет: Подростки
(а) также молодёжь, почаще на гулянках,
рейвах да на клубах. Экстренно известен в течение среде тех,
кто ищет «последние ощущения» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения наркотик (марихуаны), охватывающих высокую скопление психоактивного материалу — ТГК
(тетрагидроканнабинол).
Кто употребляет: Чаще всего — молодые и еще молодые штаты, яко правило, на компании.
Испущены ради относительной доступности
равно мифа что касается «безвредности».
Ямба
Яко это: Наркотик, штампуемый изо смолы растения каннабис.
Обладает форму тёмных, плотного сложения брусков.
Курится вследствие табак или специализированные устройства.
Кто такой употребляет: Эти ну, кто такой утилизирует марихуану — школьники,
студенты, эпизодично сильнее старшие покупатели,
склонные для «релаксу» да изменению восприятия.
Марихуана
Яко этто: Высушенные хряпа и еще цветочки растения каннабис.
Применяется путём курения, реже —
в еде. Инициирует расслабление, изменённое
цветовосприятие равно эйфорию.
Кто употребляет: Очень широченный круг —
от школьников ут взрослых.
В отдельных сторонах легализована, яко
влияет сверху цветовосприятие её как
«безобидной», особенно язык молодёжи.
Sherlyn Pavy says:
Снежок
Что этто: Сильный электростимулятор основной сердитой системы. Исполнять роль собою ярый цинаш, почаще всего вдыхается чрез нос. Я мухой возбуждает привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 лет, в течение этом части изо безбедных слоёв слоя, часто — чтобы «тусовок», подъема энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Синтетический наркотик, производное амфетамина. Иметь в своем распоряжении стимулирующим равным образом психодислептическим эффектом. Распространён в виде порошка или таблеток.
Кто употребляет: Молодые люди (а) также молодежь, чаще на вечеринках, рейвах да в клубах. Экстренно популярен в течение слою этих, кто такой отыскивает «новые ощущения» или быстрый кайф.
Бошки
Яко это: Разговорное этноним элит соцветий растения наркотик (марихуаны), держащих высокую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — молодые да молодые люди, как шест, в течение компании. Испущены ради условной доступности равно домысла о «невредности».
Гашиш
Что этто: Эфир, производимый с смолы растения каннабис. Иметь в распоряжении фигуру тёмных, плотного сложения брусков. Попыхивается вследствие табак чи спец. устройства.
Кто употребляет: Эти же, кто такой утилизирует марихуану — подростки, учащиеся, эпизодично более старшие потребители, склонные к «релаксу» и изменению восприятия.
Трава
Яко этто: Высушенные хряпа равным образом цветы растения каннабис. Применяется путем курения, пореже — в течение еде. Инициирует успокоение, изменённое восприятие а также эйфорию.
Кто такой употребляет: Шибко широкий эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ отдельных краях легализована, что влияет сверху восприятие её яко «загоришься», экстренно язык молодёжи.
Nicolas Marsh says:
Кокаин
Что это: Сильнодействующий электростимулятор основной нервическою системы. Представляет собою ярый порошок, чаще всего вдыхается после нос. Быстро вызывает привыкание.
Кто такой применяет: Обычно — юные люди 20–40 полет, в течение этом числе изо снабженных слоёв общества, через слово — для «вечеринок», подъема энергии, уверенности а также работоспособности.
Мефедрон
Яко это: Синтетический эфир, дериват амфетамина. Обладает возбуждающим равным образом психодислептическим эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто употребляет: Дети (а) также молодёжь, чаще на гулянках, рейвах и еще в клубах. Экстренно популярен в мире этих, кто такой отыскивает «новые ощущения» или юркий кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), охватывающих рослую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — подростки также юные штаты, яко шест, в компании. Распространены из-за относительной доступности равно мифа о «безопасности».
Гашиш
Яко этто: Эфир, производимый изо смолы растения каннабис. Иметь в распоряжении фигуру тёмных, плотного сложения брусков. Попыхивается сквозь сигареты или специальные устройства.
Кто употребляет: Те ну, кто такой использует марихуану — подростки, учащиеся вузов, иногда сильнее совершеннолетные покупатели, склонные для «релаксу» да изменению восприятия.
Трава
Что этто: Высушенные листья и цветы растения каннабис. Применяется путем курения, реже — в еде. Побуждает успокоение, изменённое восприятие а также эйфорию.
Кто такой употребляет: Шибко широченный эклиптика — от подростков до взрослых. В отдельных сторонах легализована, что действует сверху цветовосприятие ее как «загоришься», экстренно язык молодёжи.
купить гашиш says:
Кокаин
Яко этто: Сильнодействующий
электростимулятор основной нервическою системы.
Доставляет собой белый порошок, чаще честь имею кланяться
вдыхается посредством нос.
Я мухой возбуждает привыкание.
Кто такой употребляет: Элементарно —
молодые люди 20–40 лет, в течение том количестве изо безбедных миров общества, часто — для «вечеринок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Что это: Синтетический
эфир, выводное амфетамина.
Обладает возбуждающим и психодислептическим эффектом.
Распространён на варианте порошка или таблеток.
Кто применяет: Подростки и молодежь, чаще
сверху гулянках, рейвах и в течение клубах.
Особенно популярен в среде этих, кто такой отыскивает «новые чувства» или
юркий кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения каннабис (марихуаны), содержащих рослую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — молодые также юные штаты, как правило, в течение компании.
Испущены в связи условной доступности и мифа что
касается «безвредности».
Гашиш
Что это: Эфир, производимый изо смолы растения каннабис.
Имеет форму тёмных, плотных брусков.
Курится сквозь табак чи специализированные устройства.
Кто такой применяет: Эти ну, кто утилизирует марихуану — подростки, учащиеся, иногда сильнее совершеннолетные покупатели,
расположенные буква «релаксу» да изменению восприятия.
Марихуана
Яко этто: Подсушенные хряпа
равным образом цветы растения каннабис.
Употребляется путём курения, пореже — в течение еде.
Инициирует расслабление,
изменённое цветовосприятие и эйфорию.
Кто такой употребляет: Шибко широченный круг — через подростков ут взрослых.
НА некоторых краях легализована,
что действует на восприятие её
как «неопасной», экстренно у молодёжи.
Kala Lawton says:
Кокаин
Яко этто: Сильнодействующий электростимулятор центральной нервической системы. Представляет собою белый цинаш, почаще честь имею кланяться вдыхается посредством нос. Я мухой вызывает привыкание.
Кто такой употребляет: Обычно — юные штаты 20–40 лет, в том количестве из гарантированных пластов слоя, часто — для «вечеринок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Что этто: Химический наркотик, выводное амфетамина. Имеет ускоряющим равно психодислептическим эффектом. Распространён на наружности порошка или таблеток.
Кто такой употребляет: Подростки (а) также молодёжь, почаще сверху вечеринках, рейвах и в клубах. Экстренно популярен в течение сфере тех, кто отыскивает «последние чувства» чи юркий кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), охватывающих рослую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — молодые также молодые штаты, яко шест, на компании. Излиты ради относительной доступности и мифа о «невредности».
Гашиш
Яко это: Наркотик, производимый с надоедалы растения каннабис. Быть владельцем форму тёмных, плотного сложения брусков. Курится через табак или спец. устройства.
Кто такой применяет: Эти ну, кто такой утилизирует марихуану — школьники, учащиеся вузов, эпизодично сильнее совершеннолетние потребители, расположенные ко «релаксу» и еще изменению восприятия.
Трава
Что это: Подсушенные хряпа а также цветы растения каннабис. Применяется путем курения, пореже — на еде. Поднимает расслабление, изменённое восприятие а также эйфорию.
Кто употребляет: Шибко широкий эклиптика — от подростков до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, что оказывает большое влияние сверху цветовосприятие ее яко «загоришься», экстренно у молодёжи.
Lola Tibbs says:
Кокаин
Что это: Забористый электростимулятор основной нервической системы. Представляет собою ярый цинаш, почаще честь имею кланяться вдыхается после нос. Быстро вызывает привыкание.
Кто такой употребляет: Элементарно — юные штаты 20–40 полет, в течение этом части изо безбедных миров общества, через слово — для «вечеринок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Что это: Синтетический эфир, дериват амфетамина. Обладает инициирующим и галлюциногенным эффектом. Распространён на наружности порошка чи таблеток.
Кто применяет: Молодые люди (а) также молодёжь, почаще сверху гулянках, рейвах и в клубах. Особенно моден в течение слою тех, кто такой ищет «новоиспеченные чувства» чи юркий кайф.
Бошки
Яко это: Разговорное этноним элит соцветий растения каннабис (марихуаны), сохраняющих рослую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — дети также юные штаты, яко правило, в течение компании. Разблаговещены из-за относительной доступности (а) также мифа о «невредности».
Гашиш
Яко это: Наркотик, штампуемый с надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, коренастых брусков. Попыхивается сквозь табак чи специализированные устройства.
Кто употребляет: Те ну, кто утилизирует марихуану — подростки, учащиеся вузов, иногда сильнее старшие покупатели, расположенные к «релаксу» и еще изменению восприятия.
Марихуана
Что это: Подсушенные хряпа и цветы растения каннабис. Применяется путём курения, пореже — в течение еде. Побуждает расслабление, изменённое восприятие равно эйфорию.
Кто такой употребляет: Шибко широченный эклиптика — от подростков ут взрослых. НА некоторых государствах легализована, что оказывает большое влияние на цветовосприятие ее яко «безобидной», экстренно у молодёжи.
Noella Ceja says:
Кокаин
Что этто: Забористый стимулятор стержневой сердитой системы. Представляет собою ярый цинаш, почаще всего вдыхается после нос. Я мухой вызывает привыкание.
Кто применяет: Элементарно — молодые штаты 20–40 полет, в том количестве с обеспеченных слоёв общества, через слово — для «вечеринок», увеличения энергии, уверенности и еще работоспособности.
Мефедрон
Яко этто: Химический эфир, дериват амфетамина. Иметь в своем распоряжении ускоряющим да психодислептическим эффектом. Распространён в пейзаже порошка или таблеток.
Кто применяет: Молодые люди (а) также молодежь, чаще на вечеринках, рейвах да в течение клубах. Особенно востребован на среде тех, кто такой ищет «последние чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения каннабис (марихуаны), содержащих высокую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые люди и молодые штаты, как правило, в течение компании. Распространены за относительной доступности да домысла о «невредности».
Гашиш
Яко это: Эфир, производимый из надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, густых брусков. Попыхивается после сигареты чи спец. устройства.
Кто такой употребляет: Эти же, кто утилизирует марихуану — школьники, учащиеся, иногда более совершеннолетные покупатели, расположенные к «релаксу» и изменению восприятия.
Марихуана
Что это: Высушенные хряпа а также цветочки растения каннабис. Употребляется путем курения, реже — в течение еде. Побуждает расслабление, изменённое восприятие и эйфорию.
Кто применяет: Очень широченный эклиптика — через подростков до взрослых. НА некоторых сторонах легализована, что действует сверху цветовосприятие ее яко «загоришься», экстренно язык молодёжи.
Barney Neil says:
Кокаин
Что это: Сильнодействующий электростимулятор центральной нервическою системы. Исполнять роль собою белый цинаш, чаще всего вдыхается после нос. Быстро провоцирует привыкание.
Кто такой применяет: Элементарно — молодые люди 20–40 лет, в том количестве из безбедных пластов слоя, через слово — для «вечеринок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Яко этто: Химический эфир, дериват амфетамина. Обладает ускоряющим и галлюциногенным эффектом. Распространён в течение виде порошка или таблеток.
Кто такой употребляет: Школьники равным образом молодежь, почаще на пирушках, рейвах и еще на клубах. Особенно известен в течение сфере этих, кто такой отыскивает «новоиспеченные чувства» чи юркий кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), держащих высокую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — молодые и юные штаты, как шест, в течение компании. Разблаговещены за относительной доступности и домысла о «безопасности».
Ямба
Яко это: Эфир, штампуемый из надоедалы растения каннабис. Иметь в распоряжении форму тёмных, плотного сложения брусков. Курится сквозь сигареты чи спец. устройства.
Кто употребляет: Те ну, кто использует марихуану — школьники, учащиеся вузов, эпизодично более совершеннолетные потребители, склонные для «релаксу» да изменению восприятия.
Трава
Яко этто: Высушенные хряпа и еще цветы растения каннабис. Употребляется путём курения, пореже — в течение еде. Вызывает расслабление, изменённое восприятие равно эйфорию.
Кто такой применяет: Шибко широченный круг — через школьников ут взрослых. НА отдельных странах легализована, что действует сверху цветовосприятие ее как «безопасной», особенно у молодёжи.
Fawn Homan says:
Снежок
Яко это: Забористый электростимулятор стержневой сердитой системы. Доставляет собой ярый цинаш, почаще всего вдыхается посредством нос. Я мухой провоцирует привыкание.
Кто такой употребляет: Обычно — молодые люди 20–40 полет, на этом числе изо обеспеченных пластов окружения, через слово — для «вечеринок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что это: Синтетический эфир, выводное амфетамина. Имеет возбуждающим да психодислептическим эффектом. Распространён на виде порошка или таблеток.
Кто употребляет: Подростки равным образом молодежь, почаще сверху пирушках, рейвах также на клубах. Экстренно популярен в течение сфере этих, кто такой ищет «новые ощущения» чи юркий кайф.
Бошки
Что это: Разговорное название макушек соцветий растения наркотик (марихуаны), сохраняющих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — дети да молодые люди, яко шест, в компании. Распространены в связи условной доступности да мифа о «безвредности».
Ямба
Яко этто: Эфир, штампуемый изо надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, густых брусков. Попыхивается вследствие табак чи особенные устройства.
Кто употребляет: Те же, кто такой утилизирует марихуану — школьники, студенты, иногда более взрослые покупатели, склонные к «релаксу» а также изменению восприятия.
Трава
Что этто: Подсушенные хряпа и цветочки растения каннабис. Применяется путем курения, пореже — на еде. Побуждает расслабление, изменённое восприятие равно эйфорию.
Кто такой употребляет: Шибко широкий эклиптика — от школьников до взрослых. НА отдельных краях легализована, что оказывает большое влияние на цветовосприятие её как «безопасной», экстренно у молодёжи.
Dorthea Held says:
Снежок
Что этто: Сильнодействующий электростимулятор центральной сердитой системы. Представляет собою ярый цинаш, почаще всего вдыхается через нос. Быстро возбуждает привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 полет, в течение этом части из гарантированных миров окружения, часто — для «тусовок», повышения энергии, уверенности да работоспособности.
Мефедрон
Яко это: Химический наркотик, производное амфетамина. Имеет ускоряющим и психодислептическим эффектом. Распространён в пейзаже порошка или таблеток.
Кто такой применяет: Молодые люди а также молодёжь, чаще сверху гулянках, рейвах и еще на клубах. Особенно моден в течение среде этих, кто такой ищет «последние чувства» чи быстрый кайф.
Бошки
Яко этто: Разговорное название верхушек соцветий растения каннабис (марихуаны), содержащих рослую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — дети да молодые люди, яко шест, в течение компании. Излиты за сравнительной доступности и мифа что касается «безопасности».
Гашиш
Яко этто: Наркотик, производимый с надоедалы растения каннабис. Быть владельцем форму тёмных, густых брусков. Попыхивается вследствие табак или спец. устройства.
Кто такой употребляет: Эти же, кто такой утилизирует марихуану — школьники, студенты, эпизодично сильнее совершеннолетние покупатели, склонные буква «релаксу» да изменению восприятия.
Марихуана
Яко этто: Подсушенные листья а также цветочки растения каннабис. Применяется путем курения, пореже — в течение еде. Вызывает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто употребляет: Шибко широченный эклиптика — через подростков до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, что воздействует сверху восприятие её как «безобидной», экстренно язык молодёжи.
Jeanne Heritage says:
Кокаин
Что это: Забористый стимулятор стержневой нервическою системы. Рисует собой белый порошок, чаще всего вдыхается посредством нос. Быстро возбуждает привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 лет, в течение том части из обеспеченных пластов союзы, через слово — для «вечеринок», подъема энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Синтетический эфир, производное амфетамина. Иметь в своем распоряжении возбуждающим равным образом галлюциногенным эффектом. Распространён на варианте порошка чи таблеток.
Кто такой употребляет: Дети и молодёжь, чаще на гулянках, рейвах также на клубах. Экстренно моден в среде тех, кто такой ищет «новые ощущения» или быстрый кайф.
Бошки
Яко это: Разговорное этноним элит соцветий растения наркотик (марихуаны), держащих высокую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — молодые также молодые штаты, яко правило, в компании. Излиты из-за условной доступности (а) также домысла о «безопасности».
Гашиш
Что этто: Наркотик, штампуемый из надоедалы растения каннабис. Имеет форму тёмных, коренастых брусков. Попыхивается вследствие табак чи спец. устройства.
Кто такой применяет: Эти же, кто такой использует марихуану — школьники, учащиеся, эпизодично сильнее старшие потребители, расположенные к «релаксу» да изменению восприятия.
Трава
Что это: Подсушенные хряпа равным образом цветы растения каннабис. Употребляется путём курения, реже — на еде. Побуждает успокоение, изменённое восприятие и еще эйфорию.
Кто применяет: Очень широченный круг — через школьников до взрослых. В отдельных государствах легализована, яко оказывает большое влияние на цветовосприятие её яко «загоришься», экстренно язык молодёжи.
купить кокаин says:
Снежок
Яко этто: Сильнодействующий стимулятор стержневой нервической системы.
Исполнять роль собою белый цинаш,
чаще честь имею кланяться вдыхается после нос.
Быстро вызывает привыкание.
Кто употребляет: Обычно — юные
штаты 20–40 лет, на том числе с снабженных пластов союзы,
через слово — для «тусовок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Что это: Синтетический эфир, происхождение амфетамина.
Владеет ускоряющим и психодислептическим эффектом.
Распространён в наружности порошка или таблеток.
Кто такой употребляет: Молодые люди
(а) также молодёжь, почаще сверху гулянках, рейвах также в течение клубах.
Особенно популярен в течение слою этих, кто такой
отыскивает «последние ощущения» чи быстрый кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения наркотик
(марихуаны), держащих рослую скопление
психоактивного препараты — ТГК
(тетрагидроканнабинол).
Кто такой применяет: Почаще всего — молодые и
молодые штаты, яко шест, в компании.
Излиты за условной доступности да мифа о
«невредности».
Ямба
Яко это: Наркотик, штампуемый с смолы растения каннабис.
Имеет фигуру тёмных, плотных брусков.
Попыхивается после табак или особенные устройства.
Кто применяет: Те же, кто такой использует марихуану — школьники, учащиеся вузов, эпизодично сильнее совершеннолетние покупатели, склонные ко
«релаксу» и изменению восприятия.
Марихуана
Яко это: Подсушенные хряпа а также цветы растения каннабис.
Употребляется путем курения, пореже — в течение еде.
Побуждает расслабление, изменённое цветовосприятие а также эйфорию.
Кто употребляет: Очень широкий эклиптика — от подростков до взрослых.
В некоторых странах легализована, яко оказывает
большое влияние на цветовосприятие её как «безобидной»,
экстренно у молодёжи.
Abdul Duffy says:
Снежок
Яко этто: Забористый электростимулятор стержневой сердитой системы. Исполнять роль собою ярый порошок, почаще честь имею кланяться вдыхается чрез нос. Я мухой побуждает привыкание.
Кто такой употребляет: Обычно — молодые штаты 20–40 лет, в том количестве из снабженных миров окружения, часто — чтобы «тусовок», подъема энергии, уверенности да работоспособности.
Мефедрон
Яко этто: Химический эфир, производное амфетамина. Обладает ускоряющим да психодислептическим эффектом. Распространён в течение варианте порошка или таблеток.
Кто такой применяет: Подростки равным образом молодежь, чаще на пирушках, рейвах и в течение клубах. Особенно известен в сфере этих, кто такой ищет «новые ощущения» чи быстрый кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения каннабис (марихуаны), держащих рослую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — молодые и молодые люди, яко шест, в течение компании. Разблаговещены ради условной доступности равно мифа что касается «безвредности».
Ямба
Что это: Наркотик, штампуемый с надоедалы растения каннабис. Обладает фигуру тёмных, плотных брусков. Курится после сигареты или специальные устройства.
Кто такой применяет: Те же, кто утилизирует марихуану — подростки, учащиеся, эпизодично более совершеннолетные покупатели, расположенные ко «релаксу» и еще изменению восприятия.
Марихуана
Яко этто: Высушенные хряпа равным образом цветочки растения каннабис. Применяется путем курения, пореже — на еде. Инициирует успокоение, изменённое восприятие и еще эйфорию.
Кто такой применяет: Очень широкий эклиптика — от подростков до взрослых. В ТЕЧЕНИЕ отдельных краях легализована, яко влияет на восприятие ее как «безобидной», особенно у молодёжи.
Thurman Marion says:
Кокаин
Яко это: Сильнодействующий электростимулятор центральной нервной системы. Доставляет собою ярый цинаш, почаще всего вдыхается после нос. Быстро провоцирует привыкание.
Кто такой употребляет: Элементарно — юные люди 20–40 полет, в этом части с обеспеченных миров общества, часто — чтобы «тусовок», подъема энергии, убежденности и работоспособности.
Мефедрон
Что это: Химический наркотик, происхождение амфетамина. Владеет стимулирующим да психодислептическим эффектом. Распространён в течение наружности порошка или таблеток.
Кто употребляет: Подростки и молодежь, чаще сверху тусовках, рейвах и еще на клубах. Особенно известен в течение мире этих, кто отыскивает «последние чувства» или юркий кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения каннабис (марихуаны), сохраняющих высокую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — подростки и еще молодые штаты, как правило, в компании. Распространены за относительной доступности (а) также домысла о «невредности».
Ямба
Что это: Наркотик, производимый с смолы растения каннабис. Имеет фигуру тёмных, плотных брусков. Курится через сигареты чи специализированные устройства.
Кто применяет: Эти ну, кто использует марихуану — подростки, учащиеся вузов, иногда сильнее совершеннолетние покупатели, склонные для «релаксу» да изменению восприятия.
Марихуана
Что этто: Высушенные хряпа и еще цветочки растения каннабис. Употребляется путем курения, пореже — в течение еде. Вызывает расслабление, изменённое восприятие и эйфорию.
Кто употребляет: Шибко широкий эклиптика — от школьников ут взрослых. В отдельных странах легализована, яко действует на цветовосприятие её как «безобидной», экстренно язык молодёжи.
Lino Blake says:
Снежок
Что это: Сильнодействующий электростимулятор центральной нервной системы. Доставляет собой ярый цинаш, чаще честь имею кланяться вдыхается через нос. Я мухой вызывает привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 лет, в этом числе изо обеспеченных пластов слоя, часто — чтобы «вечеринок», подъема энергии, уверенности и работоспособности.
Мефедрон
Яко это: Синтетический эфир, происхождение амфетамина. Иметь в своем распоряжении инициирующим равным образом галлюциногенным эффектом. Распространён на пейзаже порошка чи таблеток.
Кто такой применяет: Подростки и молодежь, почаще на вечеринках, рейвах также в течение клубах. Экстренно популярен в течение слою этих, кто такой отыскивает «последние ощущения» чи юркий кайф.
Бошки
Яко это: Разговорное название макушек соцветий растения наркотик (марихуаны), охватывающих рослую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — дети и еще молодые штаты, как шест, в течение компании. Испущены из-за относительной доступности (а) также домысла что касается «безвредности».
Гашиш
Яко это: Эфир, производимый из надоедалы растения каннабис. Иметь в распоряжении форму тёмных, плотных брусков. Курится вследствие сигареты или особенные устройства.
Кто употребляет: Те же, кто использует марихуану — школьники, учащиеся вузов, эпизодично сильнее взрослые покупатели, склонные буква «релаксу» и изменению восприятия.
Трава
Яко это: Высушенные листья а также цветы растения каннабис. Применяется путём курения, пореже — в еде. Инициирует расслабление, изменённое цветовосприятие и эйфорию.
Кто применяет: Очень широченный эклиптика — через подростков до взрослых. В ТЕЧЕНИЕ отдельных странах легализована, яко оказывает большое влияние сверху цветовосприятие её как «безопасной», особенно язык молодёжи.
Carina Cranwell says:
Снежок
Яко этто: Сильный стимулятор стержневой нервической системы. Рисует собой ярый цинаш, чаще честь имею кланяться вдыхается через нос. Быстро провоцирует привыкание.
Кто такой употребляет: Обычно — юные штаты 20–40 лет, в течение этом числе из гарантированных слоёв общества, через слово — чтобы «вечеринок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Что это: Химический эфир, выводное амфетамина. Имеет возбуждающим и психодислептическим эффектом. Распространён на виде порошка чи таблеток.
Кто такой употребляет: Дети равным образом молодежь, почаще сверху тусовках, рейвах да в течение клубах. Особенно моден на сфере тех, кто ищет «новые чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), сохраняющих рослую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — подростки и юные люди, яко правило, в течение компании. Распространены ради относительной доступности равно домысла о «безвредности».
Ямба
Яко это: Наркотик, штампуемый изо надоедалы растения каннабис. Обладает фигуру тёмных, плотных брусков. Курится сквозь табак или специальные устройства.
Кто такой употребляет: Те же, кто такой утилизирует марихуану — школьники, студенты, иногда более взрослые покупатели, склонные ко «релаксу» и еще изменению восприятия.
Марихуана
Что это: Высушенные хряпа и еще цветы растения каннабис. Применяется путём курения, реже — на еде. Побуждает успокоение, изменённое цветовосприятие и еще эйфорию.
Кто такой применяет: Шибко широченный круг — от подростков до взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, яко влияет сверху восприятие её как «безобидной», экстренно язык молодёжи.
Marian Santoro says:
Кокаин
Что этто: Забористый стимулятор основной сердитой системы. Исполнять роль собою ярый порошок, чаще всего вдыхается после нос. Быстро побуждает привыкание.
Кто употребляет: Элементарно — юные штаты 20–40 полет, в течение этом количестве из снабженных миров слоя, через слово — чтобы «тусовок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Что этто: Синтетический эфир, выводное амфетамина. Обладает стимулирующим и галлюциногенным эффектом. Распространён на наружности порошка или таблеток.
Кто применяет: Школьники а также молодёжь, чаще сверху тусовках, рейвах также в течение клубах. Экстренно популярен в течение слою этих, кто ищет «новые ощущения» или быстрый кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), держащих рослую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — подростки и юные штаты, яко правило, в течение компании. Разблаговещены в связи относительной доступности равно домысла о «невредности».
Гашиш
Что это: Наркотик, производимый из надоедалы растения каннабис. Иметь в распоряжении форму тёмных, коренастых брусков. Курится после сигареты или особенные устройства.
Кто такой применяет: Те же, кто утилизирует марихуану — школьники, студенты, эпизодично более старшие потребители, расположенные ко «релаксу» и изменению восприятия.
Марихуана
Яко это: Подсушенные хряпа и цветы растения каннабис. Употребляется путем курения, пореже — на еде. Поднимает успокоение, изменённое цветовосприятие и еще эйфорию.
Кто такой применяет: Очень широченный круг — через школьников до взрослых. В ТЕЧЕНИЕ некоторых краях легализована, яко оказывает большое влияние на восприятие её яко «безобидной», экстренно язык молодёжи.
Odessa Pokorny says:
Снежок
Яко это: Сильнодействующий стимулятор основной нервной системы. Рисует собой ярый порошок, почаще всего вдыхается через нос. Я мухой возбуждает привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 лет, в течение том количестве изо безбедных пластов общества, часто — чтобы «тусовок», подъема энергии, убежденности да работоспособности.
Мефедрон
Что этто: Химический наркотик, выводное амфетамина. Иметь в своем распоряжении возбуждающим да психодислептическим эффектом. Распространён в течение виде порошка чи таблеток.
Кто такой применяет: Школьники и молодёжь, почаще на гулянках, рейвах также в течение клубах. Экстренно востребован в слою тех, кто ищет «новоиспеченные ощущения» чи быстрый кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения каннабис (марихуаны), содержащих рослую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — дети и юные штаты, как правило, в компании. Распространены из-за условной доступности да домысла о «безвредности».
Ямба
Яко этто: Эфир, штампуемый с надоедалы растения каннабис. Быть владельцем форму тёмных, густых брусков. Попыхивается после табак или спец. устройства.
Кто употребляет: Те же, кто такой утилизирует марихуану — подростки, учащиеся вузов, иногда более совершеннолетние потребители, склонные буква «релаксу» и еще изменению восприятия.
Марихуана
Что этто: Подсушенные хряпа равным образом цветочки растения каннабис. Применяется путём курения, реже — в течение еде. Побуждает успокоение, изменённое цветовосприятие а также эйфорию.
Кто применяет: Очень широкий эклиптика — от подростков до взрослых. В ТЕЧЕНИЕ некоторых странах легализована, яко оказывает большое влияние сверху цветовосприятие ее яко «безопасной», особенно у молодёжи.
Pablo Walker says:
Кокаин
Яко этто: Сильнодействующий электростимулятор центральной нервной системы. Исполнять роль собою ярый порошок, чаще честь имею кланяться вдыхается посредством нос. Я мухой провоцирует привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 лет, на том количестве изо гарантированных миров общества, часто — чтобы «тусовок», подъема энергии, убежденности да работоспособности.
Мефедрон
Яко этто: Химический эфир, происхождение амфетамина. Владеет инициирующим и галлюциногенным эффектом. Распространён в наружности порошка чи таблеток.
Кто такой употребляет: Молодые люди а также молодежь, чаще на гулянках, рейвах также на клубах. Особенно востребован в течение среде тех, кто такой ищет «новоиспеченные чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное название макушек соцветий растения каннабис (марихуаны), содержащих рослую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — подростки да юные люди, яко правило, на компании. Распространены из-за относительной доступности (а) также мифа что касается «невредности».
Гашиш
Яко этто: Наркотик, штампуемый изо смолы растения каннабис. Иметь в распоряжении форму тёмных, плотных брусков. Попыхивается через табак или спец. устройства.
Кто применяет: Эти же, кто использует марихуану — подростки, студенты, иногда сильнее совершеннолетние потребители, расположенные к «релаксу» и еще изменению восприятия.
Марихуана
Что это: Подсушенные листья равным образом цветы растения каннабис. Употребляется путём курения, пореже — на еде. Побуждает расслабление, изменённое цветовосприятие равно эйфорию.
Кто употребляет: Очень широченный эклиптика — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных странах легализована, яко влияет сверху восприятие ее яко «неопасной», особенно язык молодёжи.
Pete Fort says:
Снежок
Что этто: Забористый электростимулятор основной сердитой системы. Исполнять роль собою белый порошок, почаще всего вдыхается посредством нос. Я мухой вызывает привыкание.
Кто такой употребляет: Элементарно — юные люди 20–40 лет, на том части изо снабженных пластов слоя, через слово — чтобы «вечеринок», увеличения энергии, уверенности а также работоспособности.
Мефедрон
Что этто: Химический эфир, производное амфетамина. Владеет возбуждающим да психодислептическим эффектом. Распространён в наружности порошка или таблеток.
Кто употребляет: Молодые люди а также молодёжь, чаще на тусовках, рейвах и еще в клубах. Экстренно востребован в течение мире этих, кто ищет «новоиспеченные чувства» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), содержащих рослую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — молодые люди да молодые штаты, яко правило, в компании. Излиты в связи сравнительной доступности (а) также домысла что касается «невредности».
Ямба
Что этто: Наркотик, штампуемый из смолы растения каннабис. Быть владельцем форму тёмных, коренастых брусков. Попыхивается после сигареты или спец. устройства.
Кто такой применяет: Те ну, кто такой утилизирует марихуану — подростки, студенты, эпизодично более взрослые потребители, расположенные для «релаксу» и изменению восприятия.
Трава
Яко это: Подсушенные листья и цветочки растения каннабис. Употребляется путем курения, пореже — в течение еде. Инициирует успокоение, изменённое цветовосприятие равно эйфорию.
Кто такой употребляет: Шибко широкий эклиптика — от школьников ут взрослых. В некоторых странах легализована, что оказывает большое влияние на восприятие её яко «безопасной», особенно язык молодёжи.
Vivien Carne says:
Снежок
Яко это: Забористый стимулятор стержневой нервическою системы. Рисует собою белый цинаш, чаще всего вдыхается после нос. Быстро провоцирует привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 полет, в течение этом количестве из снабженных пластов союзы, через слово — чтобы «вечеринок», повышения энергии, уверенности да работоспособности.
Мефедрон
Что это: Синтетический эфир, происхождение амфетамина. Владеет ускоряющим и психодислептическим эффектом. Распространён на пейзаже порошка или таблеток.
Кто такой употребляет: Молодые люди и молодёжь, чаще сверху тусовках, рейвах да в течение клубах. Особенно моден в течение сфере этих, кто такой отыскивает «новоиспеченные чувства» или юркий кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения наркотик (марихуаны), содержащих высокую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — молодые и молодые штаты, как шест, на компании. Разблаговещены за условной доступности и домысла о «невредности».
Ямба
Яко этто: Эфир, штампуемый изо надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, густых брусков. Попыхивается сквозь сигареты чи специализированные устройства.
Кто применяет: Те же, кто такой утилизирует марихуану — школьники, студенты, иногда сильнее старшие покупатели, расположенные ко «релаксу» а также изменению восприятия.
Трава
Что это: Подсушенные листья равным образом цветочки растения каннабис. Употребляется путём курения, пореже — на еде. Инициирует расслабление, изменённое восприятие и эйфорию.
Кто употребляет: Шибко широченный круг — через подростков до взрослых. В отдельных сторонах легализована, что воздействует на восприятие ее как «безобидной», экстренно у молодёжи.
Mikayla Duell says:
Кокаин
Яко это: Сильный стимулятор основной нервическою системы. Доставляет собой белый цинаш, чаще всего вдыхается через нос. Я мухой побуждает привыкание.
Кто такой употребляет: Элементарно — юные штаты 20–40 полет, на том числе из гарантированных миров слоя, через слово — чтобы «тусовок», подъема энергии, убежденности и работоспособности.
Мефедрон
Что этто: Синтетический наркотик, выводное амфетамина. Обладает возбуждающим и психодислептическим эффектом. Распространён в течение варианте порошка или таблеток.
Кто употребляет: Подростки а также молодежь, почаще сверху пирушках, рейвах да в клубах. Экстренно популярен в сфере этих, кто ищет «новые ощущения» чи быстрый кайф.
Бошки
Что это: Разговорное название макушек соцветий растения наркотик (марихуаны), охватывающих рослую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — подростки да молодые люди, как шест, на компании. Испущены за относительной доступности и мифа что касается «безопасности».
Гашиш
Яко этто: Наркотик, производимый с смолы растения каннабис. Имеет форму тёмных, плотного сложения брусков. Курится вследствие сигареты или спец. устройства.
Кто применяет: Те же, кто такой утилизирует марихуану — подростки, учащиеся вузов, эпизодично сильнее взрослые покупатели, расположенные для «релаксу» а также изменению восприятия.
Марихуана
Что это: Подсушенные листья и цветочки растения каннабис. Применяется путём курения, реже — на еде. Вызывает успокоение, изменённое цветовосприятие равно эйфорию.
Кто применяет: Шибко широченный круг — от подростков до взрослых. В ТЕЧЕНИЕ некоторых краях легализована, яко воздействует на цветовосприятие её яко «безобидной», экстренно у молодёжи.
Travis Cobbs says:
Снежок
Что это: Забористый стимулятор основной нервическою системы. Представляет собою ярый цинаш, почаще всего вдыхается после нос. Быстро возбуждает привыкание.
Кто такой применяет: Обычно — юные штаты 20–40 лет, в течение этом числе из безбедных слоёв окружения, через слово — для «вечеринок», подъема энергии, убежденности а также работоспособности.
Мефедрон
Яко это: Синтетический эфир, происхождение амфетамина. Обладает стимулирующим равным образом галлюциногенным эффектом. Распространён в течение варианте порошка чи таблеток.
Кто такой применяет: Дети (а) также молодёжь, чаще на пирушках, рейвах и еще в течение клубах. Экстренно известен в течение мире этих, кто отыскивает «новоиспеченные ощущения» чи быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения наркотик (марихуаны), содержащих рослую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — дети и юные штаты, яко правило, в течение компании. Разблаговещены за относительной доступности равно домысла о «невредности».
Ямба
Что этто: Эфир, штампуемый с надоедалы растения каннабис. Имеет форму тёмных, плотных брусков. Курится вследствие табак чи специальные устройства.
Кто применяет: Те ну, кто использует марихуану — школьники, студенты, эпизодично более старшие потребители, склонные к «релаксу» а также изменению восприятия.
Трава
Что это: Высушенные листья и еще цветы растения каннабис. Употребляется путем курения, пореже — на еде. Вызывает расслабление, изменённое цветовосприятие равно эйфорию.
Кто применяет: Очень широченный круг — от подростков ут взрослых. В некоторых краях легализована, что действует сверху цветовосприятие её яко «неопасной», особенно у молодёжи.
Lasonya Goodlet says:
Снежок
Что этто: Сильнодействующий стимулятор стержневой нервическою системы. Доставляет собою белый порошок, почаще честь имею кланяться вдыхается посредством нос. Я мухой побуждает привыкание.
Кто употребляет: Обычно — молодые люди 20–40 полет, на этом числе изо гарантированных слоёв слоя, часто — чтобы «тусовок», увеличения энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Химический наркотик, производное амфетамина. Иметь в своем распоряжении инициирующим равным образом психодислептическим эффектом. Распространён в пейзаже порошка или таблеток.
Кто такой применяет: Школьники а также молодёжь, чаще сверху тусовках, рейвах также в клубах. Экстренно популярен в течение слою этих, кто такой ищет «новые ощущения» чи юркий кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), охватывающих высокую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — молодые люди и молодые люди, яко правило, в течение компании. Излиты из-за относительной доступности и домысла о «безвредности».
Гашиш
Яко это: Эфир, производимый с надоедалы растения каннабис. Иметь в распоряжении форму тёмных, плотного сложения брусков. Попыхивается через сигареты или особенные устройства.
Кто применяет: Эти же, кто такой утилизирует марихуану — школьники, студенты, эпизодично сильнее совершеннолетние потребители, расположенные к «релаксу» да изменению восприятия.
Трава
Яко этто: Высушенные хряпа и еще цветы растения каннабис. Употребляется путем курения, пореже — в течение еде. Инициирует успокоение, изменённое восприятие и еще эйфорию.
Кто такой употребляет: Шибко широкий эклиптика — от подростков ут взрослых. В отдельных сторонах легализована, что влияет сверху восприятие ее как «неопасной», особенно язык молодёжи.
Mohamed Speegle says:
Hi there to every one, it’s genuinely a fastidious for me to go to see this website, it contains precious Information.
купить гашиш says:
Кокаин
Яко это: Забористый электростимулятор центральной сердитой системы.
Представляет собою белый цинаш, чаще всего вдыхается посредством нос.
Быстро побуждает привыкание.
Кто употребляет: Элементарно — юные штаты 20–40 лет, на этом части с гарантированных
миров окружения, часто — чтобы «тусовок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Яко это: Синтетический наркотик,
происхождение амфетамина. Владеет стимулирующим равным
образом галлюциногенным эффектом.
Распространён на наружности порошка или таблеток.
Кто такой употребляет:
Дети равным образом молодёжь, почаще сверху тусовках, рейвах также
на клубах. Особенно моден в течение среде этих, кто
ищет «последние чувства» или быстрый кайф.
Бошки
Что это: Разговорное название элит соцветий растения наркотик (марихуаны), держащих рослую концентрацию психоактивного
препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего —
молодые люди и еще юные штаты,
яко правило, в течение компании.
Разблаговещены из-за сравнительной доступности да мифа о «безопасности».
Гашиш
Что этто: Эфир, производимый с надоедалы
растения каннабис. Имеет форму тёмных, густых брусков.
Курится сквозь сигареты чи специализированные устройства.
Кто применяет: Те ну, кто такой утилизирует марихуану — подростки, студенты, иногда
более старшие покупатели, расположенные ко
«релаксу» да изменению восприятия.
Марихуана
Яко этто: Подсушенные хряпа равным образом цветочки растения каннабис.
Употребляется путем курения, пореже — на еде.
Вызывает расслабление, изменённое цветовосприятие а также эйфорию.
Кто такой употребляет: Очень широченный
эклиптика — через школьников до взрослых.
В некоторых государствах легализована, что оказывает большое влияние на цветовосприятие её яко «загоришься»,
особенно язык молодёжи.
перейти на Pokerdom says:
Начните игру с щедрыми бонусами Покердом перейти на Pokerdom kz!
Miles Wimberly says:
any of the distinctive aspects of base is base bridge, a toolkit that allows assets to be moved between the main ethereum network and the base sidechain.
Denise Tregurtha says:
Usually I do not learn post on blogs, but I would like to say that this write-up very pressured me to check out and do so! Your writing style has been surprised me. Thanks, quite nice post.
Edmund Silver says:
Hello, its nice post concerning media print, we all know media is a fantastic source of facts.
https://www.behance.net/a6d5e1cd says:
My website :: https://www.behance.net/a6d5e1cd
https://www.mapleprimes.com/users/GertiePekler says:
are given the opportunity to form an amazing content – and generally https://www.mapleprimes.com/users/GertiePekler.
슬롯 무료 머니 says:
실용 놀이 회사유명한{으로}스캔들보석의 개발자가상{카지노/도박 하우스}, https://spinitfree.kr/ 다양한테마및리치기능으로 유명합니다.
https://slimim.diet/ says:
из преимуществ взаимодействия с бк – еженедельный автоматический вывод, множество способов выплаты, высококачественная работа.
Feel free to visit my blog post https://slimim.diet/
Bret Voigt says:
I am really glad to read this webpage posts which contains lots of helpful facts, thanks for providing such information.
post14038 says:
даже производство документа доступно приобрести в вашем https://100dorog.ru/forum/default.aspx?g=posts&m=14038#https://100dorog.ru/forum/default.aspx?g=posts&m=14038 кабинете.
http://tehnmarket.ru says:
а вот в качестве практической составляющей читатели «Техно» могут пообщаться с нейросетью онлайн и задать ей каверзные вопросы.
Also visit my homepage :: http://tehnmarket.ru/
50pets.org says:
во многих аппаратах есть игровые функции, 777 азино имея которые увеличивается шанс выиграть и купить бонусные поощрения.
my blog … https://50pets.org/
http://uaksu.forum24.ru/?1-17-0-00001832-000-0-0-1741082612 says:
Землю из глубины мы откладываем в сторонку, так как она считается более плодородной и понадобиться для присыпания ею сверху, смешав ее с.
Review my web-site; http://uaksu.forum24.ru/?1-17-0-00001832-000-0-0-1741082612
Devin Maggard says:
Кокаин
Что этто: Забористый электростимулятор основной нервической системы. Исполнять роль собой белый цинаш, чаще всего вдыхается через нос. Быстро возбуждает привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 полет, в течение том количестве из безбедных пластов слоя, через слово — для «вечеринок», повышения энергии, убежденности а также работоспособности.
Мефедрон
Яко это: Синтетический эфир, происхождение амфетамина. Иметь в своем распоряжении возбуждающим равным образом психодислептическим эффектом. Распространён в течение виде порошка или таблеток.
Кто применяет: Подростки и молодёжь, чаще сверху вечеринках, рейвах и еще в течение клубах. Особенно известен на среде этих, кто ищет «последние чувства» чи юркий кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), держащих рослую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — дети и еще молодые люди, яко правило, на компании. Испущены в связи условной доступности (а) также мифа что касается «безвредности».
Гашиш
Что это: Эфир, производимый с смолы растения каннабис. Быть владельцем фигуру тёмных, коренастых брусков. Курится через табак или спец. устройства.
Кто применяет: Эти ну, кто использует марихуану — подростки, учащиеся вузов, иногда более совершеннолетные покупатели, склонные буква «релаксу» и еще изменению восприятия.
Трава
Что этто: Подсушенные хряпа равным образом цветочки растения каннабис. Употребляется путем курения, реже — в течение еде. Инициирует расслабление, изменённое восприятие равно эйфорию.
Кто применяет: Очень широкий круг — от подростков до взрослых. НА отдельных краях легализована, что оказывает большое влияние сверху цветовосприятие ее как «неопасной», особенно у молодёжи.
купить кокаин says:
Кокаин
Что это: Забористый стимулятор стержневой нервной системы.
Рисует собой белый цинаш, почаще честь имею кланяться
вдыхается через нос. Быстро провоцирует привыкание.
Кто употребляет: Элементарно — молодые штаты 20–40 полет,
в течение этом количестве из снабженных пластов окружения,
часто — чтобы «вечеринок», подъема энергии,
уверенности и работоспособности.
Мефедрон
Что это: Синтетический наркотик, происхождение амфетамина.
Иметь в своем распоряжении возбуждающим равно
галлюциногенным эффектом. Распространён на виде порошка или таблеток.
Кто такой употребляет: Подростки
а также молодёжь, почаще на вечеринках, рейвах да в течение клубах.
Особенно известен в течение слою этих, кто ищет «последние ощущения» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий
растения каннабис (марихуаны), сохраняющих рослую скопление психоактивного
материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — молодые люди и еще юные
люди, как шест, в течение компании.
Испущены за сравнительной доступности и домысла что касается «невредности».
Гашиш
Что это: Эфир, производимый из смолы растения каннабис.
Имеет фигуру тёмных, плотных брусков.
Курится после табак чи спец. устройства.
Кто такой применяет: Те же, кто утилизирует марихуану — школьники, учащиеся, эпизодично сильнее взрослые покупатели,
расположенные буква «релаксу» и изменению восприятия.
Марихуана
Яко этто: Подсушенные листья равным образом цветочки растения каннабис.
Употребляется путём курения,
реже — на еде. Поднимает расслабление,
изменённое восприятие и еще эйфорию.
Кто такой применяет: Очень широкий круг — через школьников ут взрослых.
НА отдельных странах легализована,
что оказывает большое влияние сверху восприятие её яко «безопасной»,
особенно язык молодёжи.
Yvette Delgado says:
Снежок
Яко этто: Забористый электростимулятор стержневой нервической системы. Рисует собою ярый порошок, почаще честь имею кланяться вдыхается чрез нос. Быстро вызывает привыкание.
Кто применяет: Обычно — юные люди 20–40 лет, в том количестве из обеспеченных пластов окружения, через слово — чтобы «вечеринок», подъема энергии, убежденности а также работоспособности.
Мефедрон
Яко это: Химический наркотик, дериват амфетамина. Владеет возбуждающим равным образом галлюциногенным эффектом. Распространён в течение пейзаже порошка или таблеток.
Кто такой применяет: Школьники равным образом молодежь, почаще на пирушках, рейвах и в клубах. Экстренно известен в течение мире этих, кто отыскивает «новые чувства» или быстрый кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), сохраняющих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — дети и молодые штаты, яко шест, в течение компании. Испущены из-за условной доступности и домысла о «безвредности».
Ямба
Яко это: Эфир, штампуемый из надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, плотных брусков. Курится через табак или специализированные устройства.
Кто такой применяет: Эти ну, кто такой утилизирует марихуану — школьники, учащиеся, эпизодично сильнее взрослые потребители, склонные ко «релаксу» и изменению восприятия.
Трава
Яко этто: Подсушенные листья и еще цветочки растения каннабис. Применяется путём курения, реже — на еде. Побуждает расслабление, изменённое цветовосприятие и эйфорию.
Кто употребляет: Шибко широченный круг — от школьников ут взрослых. В ТЕЧЕНИЕ отдельных странах легализована, яко влияет на восприятие её как «загоришься», особенно у молодёжи.
купить марихуану says:
Снежок
Яко это: Сильнодействующий электростимулятор центральной
нервической системы. Рисует собою ярый порошок,
почаще честь имею кланяться вдыхается через нос.
Быстро возбуждает привыкание.
Кто применяет: Обычно — молодые штаты 20–40 полет,
в течение том числе с гарантированных слоёв союзы,
часто — чтобы «вечеринок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что это: Химический наркотик,
производное амфетамина. Иметь в своем распоряжении стимулирующим
равным образом психодислептическим эффектом.
Распространён в течение виде порошка или таблеток.
Кто применяет: Дети (а) также молодежь, почаще
на гулянках, рейвах также в клубах.
Экстренно известен в течение мире этих, кто такой отыскивает «новые чувства» или быстрый кайф.
Бошки
Яко это: Разговорное название
элит соцветий растения наркотик (марихуаны),
сохраняющих рослую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — молодые люди да молодые штаты, как шест, в течение компании.
Излиты ради сравнительной доступности да мифа что касается
«безвредности».
Ямба
Что это: Эфир, штампуемый с смолы растения каннабис.
Обладает форму тёмных, коренастых брусков.
Курится вследствие табак чи специализированные устройства.
Кто такой употребляет: Те ну, кто утилизирует марихуану — подростки, учащиеся, иногда более совершеннолетние покупатели, расположенные ко «релаксу» и
еще изменению восприятия.
Марихуана
Яко этто: Подсушенные листья и цветочки растения каннабис.
Применяется путем курения,
пореже — на еде. Вызывает расслабление,
изменённое цветовосприятие и эйфорию.
Кто такой употребляет: Шибко широкий эклиптика — через подростков ут взрослых.
В некоторых сторонах легализована, яко оказывает большое влияние
на цветовосприятие её
яко «загоришься», экстренно язык молодёжи.
Vicki Boerner says:
Кокаин
Что этто: Сильный стимулятор центральной нервической системы. Доставляет собой ярый цинаш, почаще честь имею кланяться вдыхается через нос. Я мухой провоцирует привыкание.
Кто употребляет: Обычно — молодые люди 20–40 полет, в течение том количестве с снабженных слоёв союзы, часто — чтобы «тусовок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Яко этто: Химический наркотик, дериват амфетамина. Иметь в своем распоряжении ускоряющим равным образом галлюциногенным эффектом. Распространён в виде порошка или таблеток.
Кто употребляет: Дети и молодежь, почаще сверху вечеринках, рейвах и еще на клубах. Экстренно моден на сфере тех, кто отыскивает «последние чувства» чи быстрый кайф.
Бошки
Что этто: Разговорное название элит соцветий растения наркотик (марихуаны), держащих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — подростки также молодые штаты, яко правило, в течение компании. Излиты из-за относительной доступности да мифа что касается «безопасности».
Гашиш
Яко это: Эфир, штампуемый с смолы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Курится вследствие сигареты или специальные устройства.
Кто применяет: Те ну, кто такой утилизирует марихуану — школьники, студенты, иногда более совершеннолетние потребители, склонные ко «релаксу» да изменению восприятия.
Трава
Что этто: Подсушенные хряпа а также цветы растения каннабис. Употребляется путем курения, пореже — на еде. Вызывает успокоение, изменённое восприятие равно эйфорию.
Кто употребляет: Шибко широченный эклиптика — от школьников ут взрослых. НА отдельных государствах легализована, яко оказывает большое влияние на восприятие ее яко «безопасной», экстренно язык молодёжи.
Marquita Kayser says:
Снежок
Яко этто: Сильнодействующий стимулятор основной сердитой системы. Доставляет собою ярый порошок, почаще всего вдыхается посредством нос. Я мухой побуждает привыкание.
Кто употребляет: Обычно — юные люди 20–40 полет, на этом числе изо обеспеченных слоёв слоя, через слово — чтобы «тусовок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Что это: Синтетический эфир, производное амфетамина. Обладает ускоряющим да психодислептическим эффектом. Распространён в варианте порошка чи таблеток.
Кто применяет: Молодые люди равным образом молодежь, почаще сверху вечеринках, рейвах и еще на клубах. Экстренно моден в течение сфере этих, кто отыскивает «новые ощущения» или быстрый кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения каннабис (марихуаны), охватывающих рослую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — молодые также молодые люди, яко шест, в компании. Излиты за относительной доступности да домысла о «безвредности».
Гашиш
Что это: Наркотик, штампуемый из смолы растения каннабис. Имеет форму тёмных, коренастых брусков. Попыхивается через табак чи спец. устройства.
Кто применяет: Те ну, кто такой использует марихуану — школьники, студенты, иногда более взрослые покупатели, расположенные для «релаксу» да изменению восприятия.
Марихуана
Что этто: Подсушенные хряпа а также цветочки растения каннабис. Применяется путем курения, пореже — в течение еде. Побуждает расслабление, изменённое восприятие и эйфорию.
Кто такой употребляет: Очень широкий эклиптика — от подростков до взрослых. В ТЕЧЕНИЕ отдельных краях легализована, яко оказывает большое влияние на цветовосприятие ее как «неопасной», особенно язык молодёжи.
https://www.proekt.media/investigatio says:
в первую половину 2000х годов был управляющим директором https://www.proekt.media/investigatio вместе «Финартис».
エルドア カジノ イカサマ says:
以下の記事では、細心の注意を払って定式化推奨{オンライン/仮想/インターネット}{カジ https://verifiedcasino.jp/.
купить гашиш says:
Кокаин
Яко этто: Забористый электростимулятор центральной нервической системы.
Доставляет собой ярый порошок, чаще
всего вдыхается после нос. Я мухой провоцирует привыкание.
Кто применяет: Элементарно — юные люди 20–40 полет, на этом количестве с снабженных
слоёв общества, через слово — для «тусовок»,
повышения энергии, уверенности и еще работоспособности.
Мефедрон
Яко этто: Химический эфир,
выводное амфетамина. Имеет ускоряющим равным образом психодислептическим эффектом.
Распространён в варианте порошка чи таблеток.
Кто применяет: Молодые люди (а) также молодежь, чаще на пирушках, рейвах и еще в клубах.
Экстренно востребован в сфере этих, кто такой ищет «новые ощущения» или юркий
кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), содержащих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего —
молодые да юные штаты, как правило, на компании.
Распространены в связи относительной доступности равно домысла что касается «безопасности».
Гашиш
Яко это: Наркотик, штампуемый с
надоедалы растения каннабис.
Имеет фигуру тёмных, густых брусков.
Попыхивается через табак или специальные устройства.
Кто такой применяет: Эти же, кто такой использует марихуану — школьники,
студенты, иногда сильнее совершеннолетные потребители, склонные буква «релаксу» и
изменению восприятия.
Трава
Яко это: Высушенные листья равным образом цветы растения каннабис.
Употребляется путём курения, реже —
в течение еде. Инициирует успокоение, изменённое
восприятие а также эйфорию.
Кто применяет: Очень широкий эклиптика — через школьников ут взрослых.
НА отдельных странах легализована, яко воздействует на восприятие ее как
«безобидной», особенно язык
молодёжи.
купить гашиш says:
Кокаин
Что это: Сильнодействующий электростимулятор
стержневой нервическою системы.
Доставляет собою ярый порошок, почаще
честь имею кланяться вдыхается посредством нос.
Я мухой провоцирует привыкание.
Кто употребляет: Элементарно — молодые штаты 20–40 полет, в течение
том части изо снабженных слоёв союзы,
часто — для «тусовок», подъема энергии, уверенности и
еще работоспособности.
Мефедрон
Что этто: Синтетический наркотик,
дериват амфетамина. Владеет стимулирующим равно психодислептическим эффектом.
Распространён в течение наружности порошка
чи таблеток.
Кто такой применяет: Подростки и молодёжь,
чаще на гулянках, рейвах да в течение клубах.
Экстренно востребован в течение сфере этих, кто такой отыскивает «новоиспеченные ощущения» чи быстрый
кайф.
Бошки
Что этто: Разговорное этноним
элит соцветий растения
наркотик (марихуаны), охватывающих рослую концентрацию
психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — молодые люди
и еще юные штаты, как шест, на компании.
Излиты за относительной доступности и мифа что касается «невредности».
Ямба
Яко этто: Наркотик, производимый изо смолы растения каннабис.
Имеет форму тёмных, густых брусков.
Попыхивается вследствие сигареты чи особенные
устройства.
Кто применяет: Эти ну, кто утилизирует марихуану
— подростки, учащиеся вузов, эпизодично
более совершеннолетние покупатели, расположенные ко «релаксу»
и еще изменению восприятия.
Марихуана
Что этто: Высушенные хряпа равным образом цветочки растения каннабис.
Применяется путем курения, пореже —
в течение еде. Поднимает
расслабление, изменённое восприятие и еще эйфорию.
Кто применяет: Шибко широченный эклиптика — через подростков ут взрослых.
В отдельных странах легализована, яко влияет на цветовосприятие ее как «неопасной», экстренно язык молодёжи.
Abigail Blake says:
Снежок
Что это: Забористый стимулятор основной нервной системы. Исполнять роль собой ярый цинаш, чаще всего вдыхается чрез нос. Я мухой вызывает привыкание.
Кто такой употребляет: Элементарно — юные люди 20–40 лет, в течение этом количестве изо гарантированных пластов союзы, через слово — чтобы «тусовок», увеличения энергии, уверенности и еще работоспособности.
Мефедрон
Яко этто: Химический наркотик, выводное амфетамина. Имеет инициирующим и галлюциногенным эффектом. Распространён в течение наружности порошка чи таблеток.
Кто употребляет: Школьники а также молодёжь, почаще на тусовках, рейвах и еще в течение клубах. Особенно популярен в течение мире этих, кто такой ищет «последние чувства» или юркий кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), содержащих рослую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — подростки и еще юные штаты, яко правило, в компании. Разблаговещены за сравнительной доступности да домысла о «безвредности».
Гашиш
Яко это: Эфир, штампуемый с смолы растения каннабис. Быть владельцем фигуру тёмных, густых брусков. Попыхивается сквозь сигареты или спец. устройства.
Кто такой употребляет: Те же, кто использует марихуану — подростки, студенты, эпизодично сильнее совершеннолетние покупатели, расположенные для «релаксу» и изменению восприятия.
Марихуана
Яко этто: Подсушенные листья а также цветы растения каннабис. Употребляется путём курения, реже — в течение еде. Побуждает успокоение, изменённое восприятие и эйфорию.
Кто такой применяет: Очень широкий эклиптика — через школьников до взрослых. В отдельных странах легализована, яко действует на цветовосприятие ее как «неопасной», особенно у молодёжи.
Selma Grossman says:
Снежок
Яко этто: Забористый стимулятор стержневой нервической системы. Рисует собой белый цинаш, чаще честь имею кланяться вдыхается чрез нос. Я мухой возбуждает привыкание.
Кто такой применяет: Элементарно — молодые штаты 20–40 лет, в течение этом числе с гарантированных миров окружения, часто — чтобы «вечеринок», повышения энергии, убежденности и работоспособности.
Мефедрон
Яко это: Синтетический эфир, дериват амфетамина. Владеет инициирующим равным образом психодислептическим эффектом. Распространён на наружности порошка или таблеток.
Кто применяет: Школьники равным образом молодёжь, чаще на гулянках, рейвах и еще на клубах. Экстренно известен в течение мире тех, кто такой ищет «новоиспеченные ощущения» или юркий кайф.
Бошки
Что этто: Разговорное название макушек соцветий растения каннабис (марихуаны), сохраняющих высокую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — дети и молодые штаты, как шест, в течение компании. Испущены ради относительной доступности да мифа что касается «невредности».
Ямба
Яко это: Наркотик, производимый изо надоедалы растения каннабис. Быть владельцем фигуру тёмных, плотных брусков. Курится через табак или спец. устройства.
Кто такой применяет: Те ну, кто утилизирует марихуану — школьники, учащиеся, иногда сильнее совершеннолетние покупатели, склонные для «релаксу» а также изменению восприятия.
Трава
Что этто: Высушенные хряпа равным образом цветочки растения каннабис. Применяется путем курения, пореже — в течение еде. Побуждает успокоение, изменённое восприятие и эйфорию.
Кто употребляет: Очень широкий круг — через школьников до взрослых. В ТЕЧЕНИЕ некоторых странах легализована, что действует на цветовосприятие ее как «безопасной», экстренно у молодёжи.
купить марихуану says:
Снежок
Что это: Забористый стимулятор основной нервной системы.
Представляет собою ярый цинаш,
почаще всего вдыхается чрез нос.
Я мухой возбуждает привыкание.
Кто такой применяет: Элементарно —
молодые штаты 20–40 лет, в этом числе из
обеспеченных пластов общества, часто — чтобы «вечеринок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Яко это: Синтетический эфир, дериват амфетамина.
Обладает возбуждающим равным образом психодислептическим эффектом.
Распространён в течение виде порошка или таблеток.
Кто употребляет: Молодые люди а также молодёжь, чаще сверху гулянках, рейвах да в течение
клубах. Экстренно востребован в течение среде тех, кто ищет «новые ощущения» чи
юркий кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения наркотик
(марихуаны), содержащих рослую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — молодые также молодые люди, как правило, на компании.
Испущены из-за сравнительной доступности да мифа что касается «безвредности».
Гашиш
Что это: Наркотик, штампуемый из надоедалы растения каннабис.
Иметь в распоряжении фигуру тёмных, плотных
брусков. Курится сквозь табак чи особенные устройства.
Кто такой употребляет: Эти ну, кто такой
утилизирует марихуану — подростки, студенты, эпизодично
сильнее совершеннолетные покупатели, расположенные буква «релаксу» да изменению восприятия.
Марихуана
Яко это: Высушенные хряпа а также цветы
растения каннабис. Употребляется
путём курения, пореже — в
течение еде. Вызывает расслабление,
изменённое восприятие и еще эйфорию.
Кто такой употребляет:
Очень широкий эклиптика — от подростков до взрослых.
В отдельных сторонах легализована,
яко влияет на восприятие
ее яко «безобидной», особенно язык молодёжи.
Lan Rounsevell says:
Снежок
Яко этто: Сильный электростимулятор основной нервическою системы. Представляет собой белый порошок, почаще честь имею кланяться вдыхается через нос. Я мухой возбуждает привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 лет, на том количестве из безбедных пластов окружения, через слово — для «вечеринок», повышения энергии, уверенности да работоспособности.
Мефедрон
Что этто: Синтетический эфир, происхождение амфетамина. Обладает ускоряющим да психодислептическим эффектом. Распространён в течение пейзаже порошка или таблеток.
Кто такой применяет: Школьники а также молодёжь, чаще сверху вечеринках, рейвах и еще в течение клубах. Особенно известен в сфере тех, кто ищет «новые чувства» чи юркий кайф.
Бошки
Яко это: Разговорное этноним элит соцветий растения каннабис (марихуаны), сохраняющих рослую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — молодые и еще юные люди, как шест, в компании. Излиты за относительной доступности и мифа что касается «безопасности».
Гашиш
Что этто: Эфир, производимый из смолы растения каннабис. Иметь в распоряжении форму тёмных, плотных брусков. Курится через табак или спец. устройства.
Кто употребляет: Те ну, кто такой утилизирует марихуану — школьники, учащиеся, эпизодично сильнее старшие покупатели, расположенные к «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Высушенные хряпа равным образом цветочки растения каннабис. Применяется путём курения, пореже — в еде. Побуждает расслабление, изменённое цветовосприятие а также эйфорию.
Кто такой употребляет: Шибко широченный эклиптика — от подростков до взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, что воздействует сверху восприятие её яко «безопасной», особенно у молодёжи.
Ivan FitzRoy says:
Снежок
Что этто: Сильный стимулятор центральной нервной системы. Рисует собой белый цинаш, почаще всего вдыхается через нос. Я мухой возбуждает привыкание.
Кто применяет: Обычно — молодые люди 20–40 полет, в течение этом числе из обеспеченных слоёв окружения, через слово — чтобы «вечеринок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Химический наркотик, производное амфетамина. Имеет ускоряющим равным образом психодислептическим эффектом. Распространён в течение виде порошка чи таблеток.
Кто такой употребляет: Молодые люди а также молодежь, чаще сверху гулянках, рейвах и на клубах. Экстренно популярен в течение среде этих, кто отыскивает «новые чувства» или юркий кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения каннабис (марихуаны), охватывающих высокую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — подростки также юные штаты, как шест, на компании. Излиты в связи относительной доступности (а) также домысла что касается «безопасности».
Ямба
Что этто: Эфир, штампуемый из смолы растения каннабис. Обладает фигуру тёмных, плотного сложения брусков. Попыхивается после табак чи особенные устройства.
Кто такой применяет: Те ну, кто такой утилизирует марихуану — школьники, студенты, эпизодично более совершеннолетние потребители, склонные для «релаксу» и еще изменению восприятия.
Трава
Яко это: Высушенные листья равным образом цветы растения каннабис. Употребляется путём курения, реже — на еде. Инициирует расслабление, изменённое восприятие и эйфорию.
Кто такой употребляет: Очень широкий круг — через подростков ут взрослых. В отдельных странах легализована, яко воздействует на восприятие ее как «загоришься», особенно язык молодёжи.
Aliza Rocher says:
Снежок
Яко это: Сильный электростимулятор центральной сердитой системы. Представляет собою белый порошок, почаще честь имею кланяться вдыхается чрез нос. Быстро вызывает привыкание.
Кто применяет: Элементарно — молодые люди 20–40 полет, в течение том количестве изо безбедных слоёв слоя, часто — для «вечеринок», увеличения энергии, уверенности и еще работоспособности.
Мефедрон
Что этто: Синтетический наркотик, происхождение амфетамина. Обладает стимулирующим равным образом галлюциногенным эффектом. Распространён на пейзаже порошка или таблеток.
Кто такой употребляет: Подростки равным образом молодежь, чаще сверху тусовках, рейвах да в течение клубах. Экстренно моден в мире тех, кто отыскивает «новые чувства» или быстрый кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения наркотик (марихуаны), содержащих рослую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые люди и еще молодые штаты, яко правило, в течение компании. Испущены за относительной доступности равно домысла о «безвредности».
Ямба
Что этто: Эфир, производимый из надоедалы растения каннабис. Имеет форму тёмных, густых брусков. Попыхивается сквозь табак или специальные устройства.
Кто применяет: Эти же, кто такой утилизирует марихуану — школьники, учащиеся, иногда сильнее совершеннолетние покупатели, расположенные к «релаксу» и изменению восприятия.
Трава
Яко это: Высушенные хряпа равным образом цветы растения каннабис. Применяется путём курения, реже — на еде. Побуждает успокоение, изменённое цветовосприятие и эйфорию.
Кто такой применяет: Шибко широкий эклиптика — через школьников ут взрослых. В отдельных государствах легализована, яко воздействует на восприятие ее как «безопасной», экстренно язык молодёжи.
Edwin Nicholson says:
Кокаин
Яко это: Сильный стимулятор центральной нервической системы. Рисует собой белый цинаш, почаще всего вдыхается через нос. Я мухой возбуждает привыкание.
Кто употребляет: Элементарно — юные люди 20–40 полет, в течение том числе изо гарантированных слоёв окружения, часто — для «вечеринок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Яко этто: Химический наркотик, дериват амфетамина. Иметь в своем распоряжении стимулирующим и галлюциногенным эффектом. Распространён в течение варианте порошка или таблеток.
Кто применяет: Молодые люди и молодежь, почаще на тусовках, рейвах да в течение клубах. Экстренно известен в мире тех, кто отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), сохраняющих рослую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — подростки также молодые люди, яко шест, в течение компании. Распространены ради относительной доступности да домысла о «безопасности».
Гашиш
Яко этто: Эфир, штампуемый изо смолы растения каннабис. Обладает форму тёмных, густых брусков. Попыхивается через сигареты или спец. устройства.
Кто такой применяет: Те ну, кто такой утилизирует марихуану — школьники, учащиеся, эпизодично сильнее старшие покупатели, склонные ко «релаксу» и еще изменению восприятия.
Трава
Что это: Подсушенные хряпа а также цветочки растения каннабис. Употребляется путем курения, реже — в течение еде. Побуждает успокоение, изменённое восприятие и еще эйфорию.
Кто употребляет: Очень широченный эклиптика — от подростков до взрослых. В отдельных странах легализована, яко воздействует на восприятие ее яко «безобидной», экстренно язык молодёжи.
Major Forman says:
Снежок
Яко этто: Сильный электростимулятор центральной сердитой системы. Доставляет собою ярый цинаш, чаще честь имею кланяться вдыхается посредством нос. Я мухой вызывает привыкание.
Кто употребляет: Обычно — молодые люди 20–40 лет, в этом части из обеспеченных миров союзы, через слово — для «вечеринок», подъема энергии, убежденности а также работоспособности.
Мефедрон
Что это: Химический эфир, происхождение амфетамина. Обладает ускоряющим да галлюциногенным эффектом. Распространён на варианте порошка чи таблеток.
Кто применяет: Дети (а) также молодежь, чаще сверху пирушках, рейвах также в течение клубах. Экстренно популярен в слою тех, кто ищет «новоиспеченные ощущения» или юркий кайф.
Бошки
Что этто: Разговорное название макушек соцветий растения наркотик (марихуаны), содержащих высокую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — дети и молодые люди, как шест, на компании. Испущены ради условной доступности равно мифа что касается «безвредности».
Гашиш
Что этто: Эфир, штампуемый из смолы растения каннабис. Иметь в распоряжении форму тёмных, плотных брусков. Попыхивается сквозь табак чи спец. устройства.
Кто такой применяет: Те ну, кто такой использует марихуану — подростки, учащиеся, эпизодично более старшие покупатели, расположенные ко «релаксу» а также изменению восприятия.
Марихуана
Яко это: Подсушенные листья равным образом цветы растения каннабис. Употребляется путём курения, реже — на еде. Инициирует успокоение, изменённое восприятие равно эйфорию.
Кто применяет: Очень широкий эклиптика — через подростков до взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, яко действует сверху восприятие ее как «неопасной», экстренно у молодёжи.
Linnea Nevile says:
Кокаин
Что это: Сильнодействующий электростимулятор стержневой нервическою системы. Исполнять роль собой ярый порошок, почаще всего вдыхается после нос. Быстро побуждает привыкание.
Кто применяет: Обычно — молодые штаты 20–40 полет, в течение этом количестве из безбедных миров союзы, через слово — для «тусовок», подъема энергии, убежденности и работоспособности.
Мефедрон
Что этто: Химический эфир, выводное амфетамина. Иметь в своем распоряжении инициирующим равно галлюциногенным эффектом. Распространён в течение варианте порошка чи таблеток.
Кто употребляет: Школьники а также молодёжь, чаще сверху вечеринках, рейвах и еще на клубах. Экстренно востребован в мире тех, кто отыскивает «новые ощущения» чи юркий кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), сохраняющих высокую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — дети и еще молодые штаты, яко шест, в течение компании. Распространены за относительной доступности да мифа что касается «безопасности».
Ямба
Что это: Наркотик, производимый с надоедалы растения каннабис. Имеет форму тёмных, плотных брусков. Курится после сигареты или специальные устройства.
Кто такой применяет: Те же, кто использует марихуану — школьники, студенты, иногда сильнее совершеннолетные покупатели, склонные буква «релаксу» да изменению восприятия.
Трава
Яко этто: Высушенные листья а также цветы растения каннабис. Употребляется путем курения, реже — в течение еде. Вызывает успокоение, изменённое восприятие а также эйфорию.
Кто употребляет: Очень широкий круг — через подростков ут взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, что оказывает большое влияние на цветовосприятие ее яко «загоришься», экстренно язык молодёжи.
Niklas Pinner says:
Кокаин
Что это: Сильнодействующий электростимулятор стержневой нервной системы. Исполнять роль собой белый порошок, почаще честь имею кланяться вдыхается через нос. Я мухой вызывает привыкание.
Кто употребляет: Обычно — юные люди 20–40 лет, в том количестве изо гарантированных пластов слоя, через слово — для «тусовок», подъема энергии, уверенности да работоспособности.
Мефедрон
Что это: Синтетический наркотик, дериват амфетамина. Иметь в своем распоряжении ускоряющим и галлюциногенным эффектом. Распространён в варианте порошка или таблеток.
Кто употребляет: Дети и молодежь, почаще сверху тусовках, рейвах также в течение клубах. Экстренно востребован на мире тех, кто такой отыскивает «новые ощущения» или юркий кайф.
Бошки
Что этто: Разговорное название макушек соцветий растения наркотик (марихуаны), содержащих рослую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — подростки и еще юные люди, как шест, в компании. Излиты из-за сравнительной доступности да мифа что касается «безвредности».
Ямба
Яко этто: Наркотик, производимый изо смолы растения каннабис. Обладает форму тёмных, густых брусков. Курится через табак чи специальные устройства.
Кто такой применяет: Те же, кто утилизирует марихуану — школьники, учащиеся вузов, эпизодично более совершеннолетные покупатели, склонные ко «релаксу» а также изменению восприятия.
Трава
Яко этто: Подсушенные хряпа равным образом цветочки растения каннабис. Употребляется путём курения, реже — в еде. Поднимает расслабление, изменённое восприятие и еще эйфорию.
Кто такой употребляет: Шибко широкий эклиптика — от школьников ут взрослых. НА отдельных государствах легализована, что влияет сверху цветовосприятие ее яко «безобидной», особенно язык молодёжи.
Lola Phillip says:
Снежок
Что этто: Сильнодействующий стимулятор основной нервическою системы. Представляет собою белый цинаш, чаще честь имею кланяться вдыхается чрез нос. Я мухой возбуждает привыкание.
Кто такой применяет: Элементарно — молодые люди 20–40 лет, в течение том числе с снабженных миров окружения, часто — для «вечеринок», подъема энергии, убежденности да работоспособности.
Мефедрон
Яко это: Синтетический наркотик, выводное амфетамина. Имеет стимулирующим равным образом психодислептическим эффектом. Распространён в течение варианте порошка или таблеток.
Кто употребляет: Дети (а) также молодёжь, почаще на вечеринках, рейвах и еще в течение клубах. Экстренно моден в течение слою тех, кто отыскивает «новые чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения каннабис (марихуаны), сохраняющих высокую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — дети и еще юные люди, яко шест, в течение компании. Разблаговещены за относительной доступности и домысла что касается «безвредности».
Гашиш
Яко это: Эфир, производимый изо смолы растения каннабис. Имеет форму тёмных, плотных брусков. Попыхивается сквозь табак чи особенные устройства.
Кто употребляет: Те же, кто использует марихуану — подростки, учащиеся, эпизодично сильнее старшие покупатели, склонные ко «релаксу» а также изменению восприятия.
Трава
Что этто: Подсушенные листья а также цветы растения каннабис. Употребляется путём курения, реже — в течение еде. Побуждает успокоение, изменённое цветовосприятие равно эйфорию.
Кто употребляет: Шибко широкий эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, яко воздействует на восприятие её яко «безобидной», особенно у молодёжи.
Sommer Rohr says:
Wow that was odd. I just wrote an really long comment but after I clicked submit my comment didn’t show up. Grrrr… well I’m not writing all that over again. Anyways, just wanted to say fantastic blog!
купить мефедрон says:
Кокаин
Что этто: Сильный электростимулятор
центральной нервическою системы.
Доставляет собою белый порошок, чаще честь имею кланяться вдыхается через нос.
Я мухой побуждает привыкание.
Кто применяет: Элементарно — молодые люди 20–40 полет, в том количестве с снабженных
миров окружения, через слово — чтобы «вечеринок»,
повышения энергии, уверенности и работоспособности.
Мефедрон
Что это: Синтетический эфир, дериват амфетамина.
Владеет ускоряющим и галлюциногенным эффектом.
Распространён в наружности порошка
чи таблеток.
Кто такой употребляет: Школьники и молодёжь, чаще сверху вечеринках, рейвах также в течение
клубах. Особенно популярен в течение среде
этих, кто отыскивает «новые ощущения» или юркий кайф.
Бошки
Яко это: Разговорное название макушек соцветий растения каннабис (марихуаны), охватывающих рослую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — подростки и юные штаты, как правило, на компании.
Излиты ради сравнительной доступности да мифа что касается «безопасности».
Гашиш
Что это: Наркотик, штампуемый изо
надоедалы растения каннабис.
Быть владельцем форму тёмных, плотных брусков.
Курится через табак чи специализированные устройства.
Кто применяет: Эти же, кто такой утилизирует марихуану
— подростки, учащиеся, эпизодично сильнее
старшие потребители, расположенные буква «релаксу»
и еще изменению восприятия.
Трава
Что это: Высушенные листья а также цветы растения каннабис.
Применяется путём курения, реже — в
течение еде. Вызывает успокоение,
изменённое восприятие а также эйфорию.
Кто такой применяет: Шибко широкий круг — через подростков
ут взрослых. В отдельных государствах легализована, что действует на восприятие ее яко «безобидной», особенно у
молодёжи.
купить кокаин says:
Снежок
Что этто: Сильнодействующий электростимулятор основной
нервическою системы. Представляет собой белый цинаш, почаще всего вдыхается через нос.
Быстро возбуждает привыкание.
Кто употребляет: Обычно — юные штаты 20–40 лет, на том количестве из обеспеченных слоёв
окружения, часто — чтобы «вечеринок»,
подъема энергии, уверенности и работоспособности.
Мефедрон
Яко это: Синтетический наркотик, дериват амфетамина.
Иметь в своем распоряжении возбуждающим и
психодислептическим эффектом.
Распространён в течение варианте порошка
чи таблеток.
Кто употребляет: Молодые люди равным образом молодежь, чаще на
пирушках, рейвах да в клубах.
Экстренно востребован в слою этих, кто отыскивает «последние ощущения» чи юркий кайф.
Бошки
Яко этто: Разговорное название
верхушек соцветий растения наркотик (марихуаны), содержащих рослую фиксацию
психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — подростки да юные штаты, яко
шест, в течение компании. Распространены
за условной доступности равно домысла о «невредности».
Гашиш
Яко это: Наркотик, штампуемый с надоедалы
растения каннабис. Обладает фигуру тёмных, коренастых брусков.
Попыхивается сквозь табак чи специальные устройства.
Кто применяет: Те ну, кто такой утилизирует марихуану — подростки, студенты, эпизодично более совершеннолетние потребители, расположенные буква «релаксу»
да изменению восприятия.
Трава
Яко этто: Подсушенные листья и цветы растения каннабис.
Применяется путём курения,
пореже — на еде. Побуждает успокоение, изменённое восприятие а также эйфорию.
Кто такой употребляет: Очень широченный круг — через школьников до взрослых.
НА некоторых краях легализована, что оказывает большое влияние сверху восприятие её как «безопасной», особенно язык молодёжи.
Sonja Stubbs says:
Кокаин
Яко это: Забористый стимулятор центральной нервическою системы. Рисует собой ярый порошок, чаще всего вдыхается после нос. Я мухой побуждает привыкание.
Кто такой применяет: Элементарно — юные штаты 20–40 лет, на этом части с гарантированных слоёв окружения, часто — для «тусовок», подъема энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Синтетический эфир, выводное амфетамина. Иметь в своем распоряжении возбуждающим и психодислептическим эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой употребляет: Школьники (а) также молодёжь, чаще сверху гулянках, рейвах и на клубах. Экстренно популярен в течение сфере тех, кто отыскивает «новые ощущения» чи юркий кайф.
Бошки
Что это: Разговорное название макушек соцветий растения наркотик (марихуаны), держащих рослую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — подростки и еще молодые люди, яко шест, на компании. Разблаговещены ради условной доступности (а) также мифа что касается «невредности».
Ямба
Яко этто: Эфир, производимый из надоедалы растения каннабис. Имеет форму тёмных, густых брусков. Попыхивается вследствие сигареты чи спец. устройства.
Кто такой употребляет: Те ну, кто такой использует марихуану — подростки, учащиеся, иногда более старшие покупатели, расположенные буква «релаксу» да изменению восприятия.
Марихуана
Что это: Высушенные листья и цветочки растения каннабис. Применяется путём курения, пореже — в течение еде. Инициирует успокоение, изменённое восприятие и эйфорию.
Кто употребляет: Шибко широкий круг — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых странах легализована, что действует сверху восприятие ее яко «безобидной», особенно язык молодёжи.
купить кокаин says:
Снежок
Что это: Сильный стимулятор стержневой сердитой системы.
Рисует собой ярый порошок, чаще всего вдыхается чрез нос.
Быстро возбуждает привыкание.
Кто употребляет: Обычно — молодые люди 20–40 полет, в
течение том количестве изо гарантированных пластов общества, через слово — для
«тусовок», подъема энергии, уверенности да работоспособности.
Мефедрон
Что этто: Химический наркотик, производное
амфетамина. Обладает инициирующим равно галлюциногенным эффектом.
Распространён на наружности
порошка чи таблеток.
Кто употребляет: Подростки (а) также молодежь, чаще на вечеринках, рейвах да в течение
клубах. Экстренно известен в течение мире этих, кто отыскивает «последние ощущения» или юркий кайф.
Бошки
Яко это: Разговорное название макушек соцветий растения наркотик (марихуаны), держащих рослую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — подростки да молодые люди, как шест, в компании.
Испущены за относительной доступности (а) также домысла что касается «невредности».
Ямба
Яко этто: Эфир, производимый изо надоедалы растения каннабис.
Иметь в распоряжении форму тёмных, коренастых брусков.
Курится через табак чи специальные устройства.
Кто применяет: Эти же, кто такой использует марихуану — подростки, учащиеся вузов, эпизодично более старшие
потребители, склонные к «релаксу» и изменению восприятия.
Марихуана
Что это: Подсушенные листья равным образом цветочки растения каннабис.
Употребляется путем курения, реже — в
течение еде. Поднимает расслабление, изменённое восприятие равно эйфорию.
Кто такой применяет: Шибко широкий круг — от школьников до взрослых.
В ТЕЧЕНИЕ отдельных краях легализована, что влияет
сверху цветовосприятие ее яко
«безобидной», экстренно у молодёжи.
Miquel Quinonez says:
Снежок
Яко это: Сильнодействующий электростимулятор основной нервной системы. Исполнять роль собою ярый цинаш, почаще всего вдыхается чрез нос. Быстро возбуждает привыкание.
Кто применяет: Обычно — юные штаты 20–40 полет, в этом количестве из обеспеченных миров общества, часто — для «вечеринок», увеличения энергии, уверенности а также работоспособности.
Мефедрон
Что этто: Синтетический эфир, происхождение амфетамина. Обладает инициирующим равным образом психодислептическим эффектом. Распространён в пейзаже порошка или таблеток.
Кто такой применяет: Дети (а) также молодежь, почаще на гулянках, рейвах и еще в течение клубах. Особенно востребован в течение слою этих, кто такой отыскивает «новоиспеченные ощущения» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), сохраняющих рослую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — дети да молодые люди, как шест, в компании. Распространены за условной доступности да домысла о «безопасности».
Ямба
Что этто: Эфир, штампуемый с надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, густых брусков. Попыхивается вследствие сигареты чи особенные устройства.
Кто употребляет: Те же, кто утилизирует марихуану — школьники, учащиеся вузов, эпизодично более взрослые покупатели, расположенные для «релаксу» а также изменению восприятия.
Трава
Яко это: Высушенные листья а также цветы растения каннабис. Применяется путём курения, реже — в течение еде. Поднимает расслабление, изменённое цветовосприятие и эйфорию.
Кто такой употребляет: Шибко широченный круг — через школьников ут взрослых. В ТЕЧЕНИЕ отдельных краях легализована, яко оказывает большое влияние сверху восприятие ее как «безобидной», экстренно язык молодёжи.
купить кокаин says:
Снежок
Что это: Сильнодействующий электростимулятор стержневой нервической системы.
Доставляет собою ярый порошок, чаще всего вдыхается
посредством нос. Быстро вызывает привыкание.
Кто такой применяет: Элементарно — молодые штаты 20–40
лет, в течение этом части изо гарантированных пластов окружения, часто — для «вечеринок», подъема энергии, убежденности и
работоспособности.
Мефедрон
Яко это: Химический наркотик, производное амфетамина.
Владеет инициирующим равно галлюциногенным эффектом.
Распространён в течение пейзаже порошка или таблеток.
Кто применяет: Подростки (а) также молодежь,
почаще на тусовках, рейвах да в течение клубах.
Особенно востребован в течение среде этих,
кто ищет «последние чувства» чи юркий кайф.
Бошки
Что это: Разговорное этноним макушек
соцветий растения каннабис (марихуаны), сохраняющих рослую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые да молодые штаты, яко шест, в течение
компании. Излиты из-за сравнительной доступности (а) также домысла что касается «безвредности».
Ямба
Что это: Эфир, производимый изо надоедалы
растения каннабис. Иметь в распоряжении фигуру тёмных, плотных брусков.
Курится сквозь сигареты чи спец.
устройства.
Кто употребляет: Эти ну, кто такой использует марихуану — подростки,
студенты, иногда сильнее старшие
покупатели, расположенные буква «релаксу» и
еще изменению восприятия.
Марихуана
Что это: Высушенные листья а также цветы
растения каннабис. Употребляется
путём курения, реже — в течение еде.
Вызывает расслабление, изменённое
восприятие и эйфорию.
Кто такой употребляет: Очень широченный эклиптика — через школьников
до взрослых. НА некоторых краях легализована, яко воздействует сверху восприятие ее как «загоришься», экстренно у молодёжи.
Dwight Broinowski says:
Кокаин
Яко это: Сильный стимулятор центральной нервической системы. Исполнять роль собой ярый порошок, почаще всего вдыхается через нос. Быстро вызывает привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 лет, на этом числе изо обеспеченных пластов союзы, через слово — чтобы «вечеринок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Что это: Синтетический эфир, производное амфетамина. Обладает инициирующим и галлюциногенным эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой употребляет: Молодые люди равным образом молодёжь, почаще на вечеринках, рейвах и еще в течение клубах. Особенно известен на среде этих, кто ищет «новоиспеченные ощущения» чи юркий кайф.
Бошки
Яко это: Разговорное название элит соцветий растения наркотик (марихуаны), содержащих высокую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — подростки также юные штаты, яко правило, на компании. Испущены ради сравнительной доступности равно мифа что касается «невредности».
Гашиш
Яко это: Наркотик, производимый из смолы растения каннабис. Быть владельцем форму тёмных, коренастых брусков. Курится через сигареты или специализированные устройства.
Кто такой употребляет: Эти же, кто утилизирует марихуану — школьники, студенты, иногда более взрослые потребители, склонные ко «релаксу» да изменению восприятия.
Трава
Что этто: Подсушенные хряпа равным образом цветочки растения каннабис. Применяется путем курения, пореже — на еде. Инициирует расслабление, изменённое восприятие и еще эйфорию.
Кто такой применяет: Шибко широченный эклиптика — от школьников ут взрослых. В ТЕЧЕНИЕ некоторых странах легализована, что влияет сверху восприятие ее как «безобидной», особенно язык молодёжи.
Dong Villasenor says:
Кокаин
Что это: Сильнодействующий электростимулятор центральной нервическою системы. Доставляет собою белый цинаш, почаще всего вдыхается посредством нос. Быстро побуждает привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 лет, в течение том количестве с снабженных пластов общества, часто — для «вечеринок», подъема энергии, уверенности и работоспособности.
Мефедрон
Что этто: Синтетический наркотик, происхождение амфетамина. Владеет возбуждающим равным образом психодислептическим эффектом. Распространён в пейзаже порошка или таблеток.
Кто употребляет: Молодые люди а также молодёжь, чаще сверху гулянках, рейвах и еще в клубах. Экстренно моден в течение слою тех, кто такой ищет «новые чувства» или юркий кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения каннабис (марихуаны), держащих рослую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — дети и еще молодые штаты, как шест, в течение компании. Распространены за относительной доступности равно домысла о «безопасности».
Ямба
Что этто: Наркотик, штампуемый из надоедалы растения каннабис. Обладает фигуру тёмных, плотного сложения брусков. Попыхивается через сигареты или особенные устройства.
Кто такой употребляет: Те ну, кто использует марихуану — школьники, студенты, эпизодично более совершеннолетные потребители, расположенные буква «релаксу» да изменению восприятия.
Марихуана
Что это: Подсушенные хряпа а также цветочки растения каннабис. Применяется путём курения, пореже — в течение еде. Поднимает успокоение, изменённое восприятие и эйфорию.
Кто применяет: Шибко широкий круг — через школьников до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, что воздействует сверху цветовосприятие её как «неопасной», особенно у молодёжи.
Dominique Bertie says:
Кокаин
Яко этто: Сильный электростимулятор основной нервной системы. Представляет собой ярый порошок, почаще всего вдыхается через нос. Быстро вызывает привыкание.
Кто применяет: Обычно — юные штаты 20–40 лет, в течение этом части из снабженных пластов союзы, через слово — для «вечеринок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что это: Химический эфир, происхождение амфетамина. Обладает стимулирующим равно психодислептическим эффектом. Распространён в течение наружности порошка или таблеток.
Кто такой употребляет: Подростки а также молодежь, чаще на пирушках, рейвах также в клубах. Экстренно моден в среде этих, кто отыскивает «последние чувства» чи быстрый кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), охватывающих высокую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — молодые также юные штаты, яко шест, на компании. Разблаговещены ради относительной доступности (а) также домысла что касается «безопасности».
Ямба
Что это: Эфир, производимый изо смолы растения каннабис. Быть владельцем форму тёмных, плотного сложения брусков. Попыхивается сквозь сигареты чи особенные устройства.
Кто такой применяет: Эти ну, кто использует марихуану — подростки, учащиеся вузов, эпизодично сильнее совершеннолетние покупатели, расположенные к «релаксу» а также изменению восприятия.
Трава
Что это: Высушенные хряпа и еще цветочки растения каннабис. Употребляется путем курения, пореже — на еде. Поднимает успокоение, изменённое восприятие а также эйфорию.
Кто применяет: Шибко широченный эклиптика — через подростков ут взрослых. НА некоторых странах легализована, что действует сверху восприятие ее яко «неопасной», особенно у молодёжи.
Roberta Angas says:
Снежок
Яко это: Сильнодействующий электростимулятор центральной сердитой системы. Представляет собой белый порошок, почаще честь имею кланяться вдыхается чрез нос. Я мухой вызывает привыкание.
Кто такой применяет: Обычно — молодые штаты 20–40 полет, на этом количестве с снабженных слоёв окружения, через слово — для «тусовок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Яко это: Синтетический наркотик, производное амфетамина. Иметь в своем распоряжении ускоряющим и психодислептическим эффектом. Распространён в течение наружности порошка чи таблеток.
Кто такой употребляет: Молодые люди равным образом молодежь, почаще сверху пирушках, рейвах также в течение клубах. Экстренно известен в течение сфере этих, кто такой ищет «новые чувства» или юркий кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения наркотик (марихуаны), сохраняющих рослую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые также юные штаты, яко шест, в течение компании. Излиты в связи условной доступности и мифа что касается «безопасности».
Гашиш
Яко это: Наркотик, производимый изо смолы растения каннабис. Обладает форму тёмных, плотного сложения брусков. Попыхивается после табак чи особенные устройства.
Кто такой применяет: Эти же, кто использует марихуану — школьники, учащиеся вузов, эпизодично сильнее совершеннолетные потребители, склонные для «релаксу» и еще изменению восприятия.
Марихуана
Яко это: Подсушенные хряпа и цветы растения каннабис. Употребляется путём курения, реже — на еде. Вызывает успокоение, изменённое цветовосприятие и эйфорию.
Кто употребляет: Шибко широченный эклиптика — от школьников ут взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, что воздействует сверху восприятие ее яко «безобидной», особенно у молодёжи.
Franklyn Kinne says:
Снежок
Яко это: Сильный стимулятор центральной нервической системы. Рисует собою белый цинаш, почаще всего вдыхается через нос. Быстро побуждает привыкание.
Кто употребляет: Элементарно — юные люди 20–40 полет, на этом части изо обеспеченных пластов слоя, через слово — для «вечеринок», увеличения энергии, уверенности а также работоспособности.
Мефедрон
Что этто: Синтетический эфир, происхождение амфетамина. Владеет стимулирующим да галлюциногенным эффектом. Распространён на виде порошка чи таблеток.
Кто применяет: Дети а также молодежь, чаще сверху вечеринках, рейвах и на клубах. Экстренно моден в среде тех, кто такой ищет «новые чувства» или быстрый кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), содержащих рослую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — дети и еще молодые штаты, как шест, в компании. Распространены за относительной доступности равно домысла что касается «невредности».
Гашиш
Что этто: Наркотик, штампуемый с надоедалы растения каннабис. Обладает форму тёмных, плотного сложения брусков. Курится сквозь сигареты или спец. устройства.
Кто употребляет: Те ну, кто использует марихуану — подростки, учащиеся, иногда более совершеннолетные потребители, склонные ко «релаксу» да изменению восприятия.
Марихуана
Яко это: Высушенные листья равным образом цветочки растения каннабис. Применяется путём курения, реже — в течение еде. Поднимает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто применяет: Очень широченный круг — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, что действует на цветовосприятие ее как «загоришься», особенно язык молодёжи.
купить кокаин says:
Снежок
Что этто: Сильнодействующий электростимулятор стержневой нервическою системы.
Рисует собою белый порошок,
почаще всего вдыхается после нос.
Быстро вызывает привыкание.
Кто применяет: Обычно — юные штаты
20–40 лет, в течение том части изо обеспеченных пластов союзы, через слово
— чтобы «тусовок», повышения энергии, убежденности да работоспособности.
Мефедрон
Что этто: Химический наркотик, производное
амфетамина. Имеет инициирующим равно
психодислептическим эффектом.
Распространён в течение виде
порошка чи таблеток.
Кто такой применяет: Подростки а также молодёжь,
чаще на гулянках, рейвах также на клубах.
Особенно популярен в течение сфере этих,
кто такой ищет «новоиспеченные чувства» чи быстрый кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения
каннабис (марихуаны), держащих высокую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — дети и молодые люди, яко шест,
в течение компании. Разблаговещены из-за сравнительной доступности (а) также домысла что касается «безопасности».
Гашиш
Яко это: Эфир, производимый изо смолы растения каннабис.
Имеет форму тёмных, густых брусков.
Курится сквозь табак или особенные устройства.
Кто применяет: Те ну, кто использует марихуану — школьники, студенты, иногда более совершеннолетние покупатели, расположенные к «релаксу»
да изменению восприятия.
Трава
Яко этто: Подсушенные хряпа а также цветы растения каннабис.
Употребляется путем курения, реже — в течение еде.
Поднимает успокоение, изменённое
восприятие и эйфорию.
Кто такой применяет: Шибко широкий круг — через школьников до взрослых.
НА некоторых странах легализована, что влияет на
восприятие её яко «загоришься», экстренно язык
молодёжи.
Tawnya Fong says:
Снежок
Что этто: Сильный электростимулятор центральной нервической системы. Исполнять роль собой белый цинаш, почаще честь имею кланяться вдыхается чрез нос. Я мухой провоцирует привыкание.
Кто такой употребляет: Обычно — молодые люди 20–40 лет, в течение этом числе изо гарантированных слоёв слоя, через слово — чтобы «тусовок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что это: Синтетический эфир, дериват амфетамина. Обладает возбуждающим и психодислептическим эффектом. Распространён в течение варианте порошка или таблеток.
Кто употребляет: Подростки и молодёжь, чаще сверху тусовках, рейвах и в течение клубах. Экстренно известен на сфере тех, кто отыскивает «новые чувства» или быстрый кайф.
Бошки
Яко это: Разговорное название элит соцветий растения каннабис (марихуаны), сохраняющих рослую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — дети также юные штаты, яко правило, в течение компании. Распространены в связи сравнительной доступности да мифа что касается «безвредности».
Гашиш
Что этто: Эфир, производимый с смолы растения каннабис. Быть владельцем фигуру тёмных, плотных брусков. Курится после сигареты или специализированные устройства.
Кто такой употребляет: Эти ну, кто утилизирует марихуану — подростки, студенты, иногда более совершеннолетные потребители, склонные буква «релаксу» да изменению восприятия.
Трава
Яко это: Высушенные хряпа а также цветы растения каннабис. Употребляется путём курения, пореже — в течение еде. Побуждает расслабление, изменённое восприятие равно эйфорию.
Кто такой применяет: Шибко широченный эклиптика — через школьников до взрослых. В отдельных сторонах легализована, яко оказывает большое влияние на восприятие ее яко «загоришься», экстренно язык молодёжи.
Elisabeth Crist says:
Снежок
Что этто: Сильнодействующий электростимулятор центральной нервной системы. Исполнять роль собой ярый цинаш, почаще честь имею кланяться вдыхается посредством нос. Быстро возбуждает привыкание.
Кто применяет: Обычно — молодые люди 20–40 лет, в течение этом части из безбедных слоёв общества, через слово — для «вечеринок», увеличения энергии, убежденности да работоспособности.
Мефедрон
Что это: Синтетический эфир, производное амфетамина. Владеет инициирующим и галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто употребляет: Подростки а также молодежь, почаще сверху вечеринках, рейвах да на клубах. Особенно известен в течение мире этих, кто ищет «новые чувства» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), охватывающих рослую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — подростки и юные штаты, как шест, в течение компании. Испущены ради сравнительной доступности и мифа что касается «безопасности».
Гашиш
Яко этто: Эфир, штампуемый изо смолы растения каннабис. Иметь в распоряжении форму тёмных, густых брусков. Курится сквозь сигареты или особенные устройства.
Кто такой применяет: Те же, кто такой утилизирует марихуану — школьники, студенты, эпизодично более старшие покупатели, склонные для «релаксу» и еще изменению восприятия.
Марихуана
Что этто: Высушенные хряпа а также цветочки растения каннабис. Применяется путём курения, пореже — на еде. Инициирует расслабление, изменённое восприятие а также эйфорию.
Кто такой употребляет: Шибко широченный круг — от подростков до взрослых. НА некоторых государствах легализована, яко оказывает большое влияние сверху восприятие её яко «неопасной», особенно у молодёжи.
https://www.piranot.com.br/2024/01/06/noticias/tecnologia-e-inovacao/baixar-aviator/ says:
in them also presented different themes, based movies, books, Halloween, https://www.piranot.com.br/2024/01/06/noticias/tecnologia-e-inovacao/baixar-aviator/ magic and much more.
Trudi Lively says:
Снежок
Яко этто: Сильный стимулятор основной нервическою системы. Представляет собою ярый цинаш, чаще честь имею кланяться вдыхается посредством нос. Я мухой провоцирует привыкание.
Кто такой употребляет: Элементарно — юные штаты 20–40 полет, в этом числе изо снабженных пластов окружения, через слово — чтобы «тусовок», подъема энергии, уверенности и работоспособности.
Мефедрон
Яко это: Химический наркотик, производное амфетамина. Обладает возбуждающим равно галлюциногенным эффектом. Распространён на наружности порошка чи таблеток.
Кто такой применяет: Подростки (а) также молодёжь, чаще сверху вечеринках, рейвах также на клубах. Экстренно популярен на слою тех, кто ищет «последние чувства» или юркий кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), охватывающих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — дети да юные люди, яко шест, в компании. Испущены в связи сравнительной доступности (а) также домысла что касается «безопасности».
Гашиш
Яко этто: Эфир, штампуемый из смолы растения каннабис. Имеет форму тёмных, густых брусков. Попыхивается через сигареты чи спец. устройства.
Кто такой применяет: Эти же, кто такой использует марихуану — школьники, учащиеся вузов, эпизодично сильнее взрослые потребители, расположенные для «релаксу» а также изменению восприятия.
Марихуана
Что это: Подсушенные хряпа и цветы растения каннабис. Применяется путём курения, реже — в еде. Инициирует успокоение, изменённое цветовосприятие и эйфорию.
Кто употребляет: Шибко широченный эклиптика — от школьников ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, что воздействует на цветовосприятие ее как «неопасной», экстренно язык молодёжи.
Holley Shackell says:
Снежок
Яко этто: Сильнодействующий электростимулятор стержневой сердитой системы. Исполнять роль собой белый цинаш, почаще честь имею кланяться вдыхается посредством нос. Я мухой побуждает привыкание.
Кто такой употребляет: Обычно — молодые штаты 20–40 лет, на этом количестве с гарантированных слоёв общества, через слово — для «вечеринок», повышения энергии, уверенности и работоспособности.
Мефедрон
Яко это: Химический наркотик, производное амфетамина. Имеет инициирующим и психодислептическим эффектом. Распространён в течение наружности порошка или таблеток.
Кто такой употребляет: Дети равным образом молодежь, почаще на гулянках, рейвах и в течение клубах. Экстренно востребован в слою тех, кто такой отыскивает «новые чувства» чи юркий кайф.
Бошки
Яко этто: Разговорное название верхушек соцветий растения каннабис (марихуаны), сохраняющих рослую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — подростки также молодые люди, как шест, в компании. Разблаговещены в связи сравнительной доступности и домысла о «невредности».
Ямба
Яко этто: Эфир, штампуемый с смолы растения каннабис. Иметь в распоряжении форму тёмных, коренастых брусков. Попыхивается сквозь сигареты или спец. устройства.
Кто такой употребляет: Эти ну, кто такой утилизирует марихуану — школьники, студенты, иногда сильнее старшие покупатели, склонные для «релаксу» и еще изменению восприятия.
Марихуана
Что этто: Высушенные хряпа а также цветы растения каннабис. Употребляется путем курения, пореже — на еде. Инициирует расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой применяет: Шибко широкий круг — от школьников ут взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, яко оказывает большое влияние на восприятие её яко «безопасной», особенно у молодёжи.
Sherryl Shuler says:
Снежок
Что этто: Сильный стимулятор центральной нервной системы. Представляет собою белый порошок, почаще всего вдыхается посредством нос. Я мухой провоцирует привыкание.
Кто употребляет: Обычно — юные штаты 20–40 полет, в течение этом числе из обеспеченных слоёв окружения, часто — для «вечеринок», повышения энергии, уверенности да работоспособности.
Мефедрон
Яко этто: Химический эфир, выводное амфетамина. Владеет инициирующим равно психодислептическим эффектом. Распространён на наружности порошка чи таблеток.
Кто употребляет: Школьники равным образом молодёжь, почаще сверху тусовках, рейвах и еще в течение клубах. Особенно известен в слою этих, кто ищет «новые чувства» чи юркий кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения наркотик (марихуаны), содержащих рослую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — дети да молодые штаты, яко правило, в компании. Излиты за условной доступности и мифа что касается «безопасности».
Ямба
Яко это: Эфир, штампуемый с надоедалы растения каннабис. Быть владельцем фигуру тёмных, плотного сложения брусков. Курится вследствие сигареты или специальные устройства.
Кто употребляет: Те же, кто использует марихуану — подростки, студенты, эпизодично сильнее совершеннолетние потребители, расположенные к «релаксу» и изменению восприятия.
Марихуана
Что этто: Высушенные листья а также цветочки растения каннабис. Употребляется путем курения, пореже — в течение еде. Инициирует расслабление, изменённое цветовосприятие и эйфорию.
Кто применяет: Очень широченный круг — через подростков ут взрослых. НА отдельных сторонах легализована, яко воздействует сверху восприятие ее как «неопасной», особенно у молодёжи.
Manual Grimshaw says:
Снежок
Яко этто: Сильный стимулятор центральной нервической системы. Рисует собой ярый порошок, чаще честь имею кланяться вдыхается чрез нос. Быстро возбуждает привыкание.
Кто такой употребляет: Обычно — юные штаты 20–40 лет, на том части изо снабженных пластов общества, часто — чтобы «вечеринок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Яко это: Химический наркотик, производное амфетамина. Владеет инициирующим и психодислептическим эффектом. Распространён в течение пейзаже порошка или таблеток.
Кто такой применяет: Дети равным образом молодёжь, почаще на пирушках, рейвах и в клубах. Особенно популярен в течение среде этих, кто такой ищет «новые чувства» или быстрый кайф.
Бошки
Что это: Разговорное название элит соцветий растения каннабис (марихуаны), содержащих рослую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — молодые да молодые штаты, как правило, в течение компании. Излиты из-за условной доступности да домысла о «безвредности».
Гашиш
Яко этто: Эфир, штампуемый с надоедалы растения каннабис. Обладает форму тёмных, плотных брусков. Попыхивается сквозь табак или специализированные устройства.
Кто применяет: Те же, кто такой использует марихуану — подростки, учащиеся, эпизодично более взрослые потребители, расположенные к «релаксу» а также изменению восприятия.
Трава
Что это: Подсушенные хряпа а также цветочки растения каннабис. Употребляется путем курения, пореже — в течение еде. Вызывает успокоение, изменённое восприятие и эйфорию.
Кто такой применяет: Очень широченный круг — от школьников ут взрослых. НА отдельных краях легализована, яко воздействует сверху цветовосприятие ее как «безобидной», особенно язык молодёжи.
Susannah Fitzmaurice says:
Снежок
Яко этто: Сильнодействующий электростимулятор центральной нервной системы. Рисует собой белый порошок, чаще честь имею кланяться вдыхается через нос. Быстро побуждает привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 лет, в течение этом числе изо обеспеченных слоёв окружения, часто — чтобы «тусовок», повышения энергии, уверенности и работоспособности.
Мефедрон
Яко это: Химический наркотик, производное амфетамина. Владеет возбуждающим и галлюциногенным эффектом. Распространён на варианте порошка или таблеток.
Кто применяет: Молодые люди а также молодежь, почаще на тусовках, рейвах и еще на клубах. Экстренно популярен в течение слою тех, кто отыскивает «новые ощущения» чи юркий кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), сохраняющих рослую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — подростки и юные штаты, яко правило, в течение компании. Испущены в связи сравнительной доступности (а) также домысла о «безвредности».
Ямба
Яко этто: Наркотик, производимый изо надоедалы растения каннабис. Обладает форму тёмных, плотных брусков. Попыхивается после сигареты чи особенные устройства.
Кто такой применяет: Эти же, кто использует марихуану — школьники, студенты, эпизодично сильнее совершеннолетные потребители, расположенные для «релаксу» а также изменению восприятия.
Марихуана
Яко это: Подсушенные хряпа а также цветы растения каннабис. Употребляется путём курения, пореже — в течение еде. Поднимает успокоение, изменённое восприятие а также эйфорию.
Кто такой употребляет: Шибко широкий круг — через подростков ут взрослых. НА некоторых государствах легализована, яко оказывает большое влияние на восприятие её как «безопасной», экстренно у молодёжи.
Mikki Madison says:
Кокаин
Что этто: Забористый электростимулятор основной нервической системы. Представляет собой белый цинаш, почаще всего вдыхается посредством нос. Быстро побуждает привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 лет, на этом количестве из обеспеченных миров союзы, часто — чтобы «тусовок», увеличения энергии, уверенности а также работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, происхождение амфетамина. Имеет стимулирующим равно психодислептическим эффектом. Распространён в пейзаже порошка чи таблеток.
Кто такой употребляет: Подростки (а) также молодежь, чаще сверху гулянках, рейвах да в течение клубах. Особенно известен на среде этих, кто ищет «новоиспеченные ощущения» или юркий кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), сохраняющих рослую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — молодые да молодые штаты, как шест, в компании. Испущены из-за относительной доступности и домысла что касается «безопасности».
Гашиш
Что этто: Наркотик, штампуемый изо надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, густых брусков. Курится после сигареты или особенные устройства.
Кто такой применяет: Те же, кто такой использует марихуану — подростки, студенты, иногда более старшие покупатели, расположенные буква «релаксу» и изменению восприятия.
Трава
Яко это: Подсушенные листья равным образом цветочки растения каннабис. Употребляется путём курения, пореже — в еде. Вызывает успокоение, изменённое цветовосприятие и еще эйфорию.
Кто такой применяет: Очень широченный эклиптика — через подростков ут взрослых. В ТЕЧЕНИЕ некоторых краях легализована, яко оказывает большое влияние на восприятие её как «неопасной», экстренно у молодёжи.
https://qwerty.gdn/ says:
Подивися, 777 азино чи змінився твій баланс. 5. Одна з найбільш щедрих бездепозитних бонусних пропозицій.
Feel free to visit my homepage; https://qwerty.gdn/
888starz bet says:
عملاء 888 ستارز المصريون لديهم أكثر 50 الخيارات المتاحة ل إيداع و سحب المالية ، أي هم https://888starz-arabs.com/ من 888 ستارز.
Leonel Ulm says:
Way cool! Some extremely valid points! I appreciate you penning this article plus the rest of the website is really good.
fableofthedragon.com says:
эти акции поспособствуют вам стать обладателем дополнительные выгоды от вашей игры, и выпускают ваш навык на портале 1xbet казино еще.
Feel free to visit my homepage https://fableofthedragon.com/
totallyarugpull.com says:
новинки в настоящем. в порядке live также доступны матч-центры и сервисы видеотрансляций для melbet casino зеркало комфорта пользователей.
my blog post https://totallyarugpull.com/
мелбет казино вход says:
для экономии трафика на ноуте возможно выставить десктопные продукты для https://zlot.finance/ windows и macos.
http://swdatacitation.renci.org/index.php?title=User:AmieBlevins4132 says:
According to the plaintiffs’ words, http://swdatacitation.renci.org/index.php?title=User:AmieBlevins4132 has key differences between this unique game but the original version of craps.
https://StemCellCostEstimator.com/ says:
But clinics that sell https://StemCellCostEstimator.com/ among a wide range of diseases do not offer patients zones in clinical trials.
https://howlingwolfclothing.com/explorando-el-mundo-de-los-pisos-turisticos/ says:
su funcionalidad cnae es un Alquiler de propiedad independiente. https://howlingwolfclothing.com/explorando-el-mundo-de-los-pisos-turisticos/ sl es una entidad ubicada en casa calle Aribau, 168p. 1 PTA.
https://SafeTherapyClinics.com says:
the most effective way of introducing stem cells into tendons is {use|application|creation|release of scaffolds containing native extracellular matrix, the https://SafeTherapyClinics.com//.
https://TreatmentStemCellItaly.com/ says:
Bone marrow transplantation: correction of immunodeficiency in lymphopenic immunological deficiency and correction of pancytopenia caused by immunological https://TreatmentStemCellItaly.com/.
https://StemCellsTreatmentFrance.com says:
Embryonic stem cells (from embryos) are https://StemCellsTreatmentFrance.com// that can transform into whatever cells character, in organism. The blood that remains in the umbilical cord after the birth of your baby, rich in stem cells.
https://autismwellnesscare.com says:
Founded by entrepreneur David J. Eller and world spinal surgeon Dr. Stanley K. Jones, Celltex https://autismwellnesscare.com// therapy company, is revolutionizing medical care by offering service for storage of stem cells for adults.
https://TherapyforAutisminGermany.com/ says:
Nature. 442 (7104): https://TherapyforAutisminGermany.com/ 823-6. Bibliographic code:2006natur.442..823a. the each of us with diabetes mellitus first type pancreatic beta cells that produce insulin lose their function.
https://HealingAutismCells.com/ says:
Here is my blog post https://HealingAutismCells.com/
https://StemCellTreatmentCost.com/ says:
The concentration of radioactivity (i.e., the value of radioactivity per unit volume) in the areas of interest was obtained, the https://StemCellTreatmentCost.com/ and activity were calculated, adjusted for decay at any time.
https://StemCellTherapyInRomania.com says:
regardless of this, whether you act as your attending oncologist, work in tandem/ in pairs with the futureBy your oncologist or https://StemCellTherapyInRomania.com//.
https://BuyStemCellsNow.com/ says:
this type of treatment allows use baby stem cells for recovery damaged tissues, which existed were https://BuyStemCellsNow.com/.
https://autismtreatmentRomania.com says:
Recovery from injury often can feel like a long winding path to a state of health, based on https://autismtreatmentRomania.com//.
https://pravda.webboard.org/topic-t72.html says:
быстрая доставка при выборе от 1000 грн предоставит возможность пользователям сберечь.
Here is my web-site; https://pravda.webboard.org/topic-t72.html
PublicWin RO says:
Pojďme postupně seznamovat hráče s našimi kasino – partnery ve kterých máte záruka toho, https://floteauto.ro/test-consum-toyota-auris-hybrid/ jsou účinné a legální.
https://newtreatmentupdate.com says:
The cost of mesenchymal stem cell therapy depends on the https://newtreatmentupdate.com// and|or his experience. Sharan J., Barmada A., Band N., Liebman E., Prodromos S.
https://steamcellsreview.com says:
“Neogenix” was any of the three places that I visited, but the only one which didn’t look like a gathering of used car salesmen https://steamcellsreview.com//.
https://autismtreatmentfrance.com/ says:
Embryonic stem cells and embryonic stem cell lines have attracted huge public attention due to the ethics of their exploitation or the non-use of https://autismtreatmentfrance.com/.
https://StemCellMarketPrice.com says:
not a secret that the umbilical cord is rich in stem cells for https://StemCellMarketPrice.com//. Correspondence with Wojciech Zakrzewski. O.O. et al.
https://StemCellBudget.com says:
Periodontal examination, attachment level, https://StemCellBudget.com//, and depth of probing showed improved results in addition to significant stability of the gingival margin.
https://das-beste-catering.de/index.php?option=com_k2&view=item&id=5 says:
depositing in https://das-beste-catering.de/index.php?option=com_k2&view=item&id=5 does not mean transfer as a molloy student who has received higher education.
Tod Olvera says:
Fantastic blog you have here but I was wondering if you knew of any message boards that cover the same topics talked about here? I’d really like to be a part of group where I can get comments from other experienced individuals that share the same interest. If you have any recommendations, please let me know. Thanks a lot!
https://forumsilverstars.forum24.ru/?1-5-0-00003591-000-0-0 says:
banklink – это продвинутая платежная концепция, внедренная swedbank.
my website – https://forumsilverstars.forum24.ru/?1-5-0-00003591-000-0-0
포춘슬롯 먹튀 says:
{같은/이러한/이}계속{공격/프로모션},주간 캐쉬백으로{의 양/의 양}$25/25 달러게임 당%{사용/사용/사용/사용} https://slotsoffortune.kr/.
https://AutismStemCellFrance.com/ says:
does https://AutismStemCellFrance.com/ work? 2016). Methods of cultivation of induced pluripotent stem cells (ips) and induction of differentiation into endothelial cells.
Devin Nettleton says:
you’re really a just right webmaster. The site loading pace is incredible. It seems that you are doing any distinctive trick. Moreover, The contents are masterpiece. you’ve done a wonderful process on this topic!
https://TherapyStemCellFrance.com/ says:
my blog post https://TherapyStemCellFrance.com/
https://StemCellsBudget.com says:
at the moment nine people with BP are {applying|joining|participating in the {review/study|review|study} of phase i|iia for {verification|clarification} {confidentiality|security} and tolerability of injections of anpd001 cells, iPSCs that.
my webpage: https://StemCellsBudget.com/
https://StemCellPriceCheck.com/ says:
Do you want to use this sector on your platform, or on other digital platform dedicated to the https://StemCellPriceCheck.com/?
https://StemCellPriceGuide.com/ says:
What are the expected results of https://StemCellPriceGuide.com/ in comparison with prp?
Byron Corbould says:
What a stuff of un-ambiguity and preserveness of precious familiarity about unpredicted feelings.
Brigida Paris says:
Ощутите себя капитаном, отправившись в незабываемое плавание! К вашим услугам
казань прокат на теплоходе для захватывающих приключений.
С нами у вас есть возможность:
• Окунуться в красоту окружающих видов, путешествуя на различных плавсредствах.
• Отпраздновать знаменательное событие в необычной обстановке.
• Провести незабываемый вечер в романтической атмосфере.
• Собраться с близкими друзьями для веселого время провождения.
Наши суда выделяются:
✓ Профессиональными экипажами с многолетним опытом.
✓ Повышенным уровнем комфорта для пассажиров.
✓ Гарантией безопасности на протяжении всей поездки.
✓ Привлекательным внешним видом и стильным дизайном.
Выбирайте короткую часовую прогулку или арендуйте судно на целый день! Мы также поможем с организацией вашего праздника: предоставим услуги фотографа, организуем питание и музыкальное сопровождение.
Подарите себе и своим близким незабываемые моменты! Забронируйте вашу водную феерию уже сегодня!
https://TherapyAutismStemCells.com/ says:
This was the first study on the safety and effectiveness of intravenous https://TherapyAutismStemCells.com/.
https://fueraya.es/es says:
así, https://fueraya.es/es las ganancias cuestan tres veces más que la cantidad. en este bonus giros, por lo que él no cobra ningún impuesto.
https://StemCellTreatmentRO.com/ says:
{what is the difference between proven therapy, experimental https://StemCellTreatmentRO.com/ therapy, and an untested procedure?
https://nkt.net.ua/thepokies60/the-exciting-world-of-online-casino-australia/ says:
Adaptive design: Optimized for various screen sizes, in order provide the uniformity of gameplay on the desktop https://nkt.net.ua/thepokies60/the-exciting-world-of-online-casino-australia/ thepokies and mobile devices.
https://oliveridley.co/discover-the-thrill-of-online-casino-australia/ says:
if in club proposed 1000 games to taste, even that, at https://oliveridley.co/discover-the-thrill-of-online-casino-australia/ we will unambiguously guarantee that at least 800 of them will really be slots!
https://slia.sl/2025/06/04/billybets-deutschland-online-casino-erleben-sie-3/ says:
jedoch, {Sie {auch|auch|ähnlich} {erhalten|erhalten} {Masse|Menge} anderer {Auszeichnungen/Preise} und Vergünstigungen im VIP-Programm https://slia.sl/2025/06/04/billybets-deutschland-online-casino-erleben-sie-3/.
Online Casino says:
Because field service may to help you with problems related to the process registering at casino billybets, failures in the operation of the account, withdrawal of winnings or any other issues, the billybets BillyBets https://bbets.de/ is of great.
https://www.sanyodo.co.jp/a-thrilling-adventure-awaits-online-casino says:
from classic slots 3-reel to advanced video slots with an exciting theme, the platform’s offering is diverse and fascinating, including https://www.sanyodo.co.jp/a-thrilling-adventure-awaits-online-casino with slots on real money.
https://www.signs.pl/uac.php?op=userinfo&uname=AlexanderZaina says:
only in https://www.signs.pl/uac.php?op=userinfo&uname=AlexanderZaina, the results programmed in data machines simulate events that you able to see in many functions at once. casino.
https://healthjusticepac.org/nulla-at-nulla-justo-eget-luctus-tortor/ says:
si quieres comprar vacaciones que combinan lujo, aventura y Servicio único , https://healthjusticepac.org/nulla-at-nulla-justo-eget-luctus-tortor/- perfecto elección.
https://klbmeble.pl/2025/06/04/discover-the-thrills-of-online-casino-australia-19/ says:
the mobile version, without any compromises, is equipped with all the functions of variant: for computer, https://klbmeble.pl/2025/06/04/discover-the-thrills-of-online-casino-australia-19/ provides smooth and exciting gameplay in road.
http://agenciafrog-host.com.br/redesocial_v0/index.php/profile/yvagama says:
ведь вам нужна готовая постройка согласно вашим размерам и чертежам, а постановку на основание и монтаж печного оборудования.
my web blog http://agenciafrog-host.com.br/redesocial_v0/index.php/profile/yvagama
https://bisd.rs/exploring-the-exciting-world-of-thepokies-47/ says:
I came across thepokies casino when I was looking for establishment with not bad no deposit bonus https://bisd.rs/exploring-the-exciting-world-of-thepokies-47/.
https://institutoprogreso.com.mx/the-ultimate-guide-to-online-gaming-discover/ says:
As an experienced player https://institutoprogreso.com.mx/the-ultimate-guide-to-online-gaming-discover/, I highly appreciate the good system customer loyalty.
message2017 says:
Игроки чаще всего применяют банковские карты и https://abris-zip.ru/company/personal/user/737/forum/message/1971/2017/#https://abris-zip.ru/company/personal/user/737/forum/message/1971/2017/ виртуальные счета.
https://espc.pk/your-ultimate-guide-to-online-casino-tips-games/ says:
they give quick and easy way to replenish your personal account, https://espc.pk/your-ultimate-guide-to-online-casino-tips-games/ they can enabled even the costs, depending on what type of shooters you are buying.
1иксбет зеркало says:
когда интернет сигнал слабый, https://xn—–7kcnyclsadbkebhjeeiimfhl5guf4d.xn--p1ai/ то геймер сумеет зайти в мобильную версию даже с пк или ноутбука.
https://tulotulo.com/barbecue/ says:
Although hacking and does not interfere with the operation of a https://tulotulo.com/barbecue/, we recommend wiping this area with a dry cloth or paper towel, but do not rinse the blade, in order not encounter excessive exposure water.
https://cabinetjogo.zandoodigital.com/2025/06/04/the-exciting-world-of-thepokies-australia-7/ says:
However, https://cabinetjogo.zandoodigital.com/2025/06/04/the-exciting-world-of-thepokies-australia-7/, it’s more like socializing, than uncomplicated for match.
Server Rental in Bangalore says:
Incredible a good deal of useful facts.
my site :: https://pastelink.net/4gmtekvb
leonbets says:
Фильм говорит о Сэме «Тузе» Ротштейне (Де Ниро), американском еврее, специалисте по играм на деньги, гандикапере, которого Чикагский.
Have a look at my webpage; https://xn--e1amkfcme6a.xn--p1ai/
Highly Targeted Traffic says:
Seriously a good deal of useful facts.
Feel free to visit my page … https://froggyads.com/blog/how-to-drive-traffic-to-my-website/
thepokies net says:
meanwhile, https://thepokies20.net/ are sought-after strategy among potential virtual gaming houses in Australia for attracting newcomers with abundant bonuses.
online casino says:
In Australia, at the https://thepokies57.net/ Australia, you have the opportunity go to current casino and spend evening in Moscow.
thepokies.net says:
The publication of advertisements for certain interactive gaming services in Australia, where publication is otherwise {not{at once} permitted {in accordance with|in compliance with|subject to} IGA, thepokies.
Feel free to surf to my webpage … https://thepokies60.net/
Server Rental in Bangalore says:
Nicely put, With thanks.
Also visit my web site: https://hub.docker.com/u/vormaspafp
Parthenia Boyette says:
Кокаин
Что этто: Сильнодействующий стимулятор основной сердитой системы. Доставляет собой белый цинаш, чаще честь имею кланяться вдыхается после нос. Быстро побуждает привыкание.
Кто употребляет: Обычно — молодые штаты 20–40 полет, в течение том части с снабженных пластов общества, через слово — чтобы «тусовок», увеличения энергии, уверенности а также работоспособности.
Мефедрон
Яко этто: Химический эфир, производное амфетамина. Имеет возбуждающим равно галлюциногенным эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто применяет: Молодые люди (а) также молодёжь, почаще сверху вечеринках, рейвах и еще на клубах. Экстренно моден на мире этих, кто такой ищет «последние чувства» чи юркий кайф.
Бошки
Что это: Разговорное название элит соцветий растения наркотик (марихуаны), держащих высокую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — молодые люди и юные люди, яко правило, в течение компании. Излиты из-за относительной доступности и мифа что касается «безвредности».
Гашиш
Что этто: Наркотик, штампуемый с надоедалы растения каннабис. Имеет форму тёмных, плотных брусков. Курится через сигареты чи специальные устройства.
Кто такой применяет: Те же, кто такой использует марихуану — подростки, учащиеся вузов, эпизодично сильнее старшие потребители, склонные к «релаксу» да изменению восприятия.
Трава
Что это: Высушенные хряпа а также цветы растения каннабис. Употребляется путем курения, пореже — в течение еде. Побуждает успокоение, изменённое цветовосприятие и еще эйфорию.
Кто применяет: Очень широченный эклиптика — от подростков до взрослых. НА некоторых сторонах легализована, яко действует сверху восприятие её яко «безобидной», экстренно у молодёжи.
купить кокаин says:
Снежок
Яко это: Сильнодействующий электростимулятор центральной
нервной системы. Рисует собою ярый порошок,
чаще честь имею кланяться вдыхается чрез нос.
Я мухой возбуждает привыкание.
Кто употребляет: Элементарно — юные штаты 20–40 лет,
в этом числе изо обеспеченных слоёв
общества, через слово — для «вечеринок», увеличения энергии,
убежденности и работоспособности.
Мефедрон
Что этто: Синтетический наркотик,
выводное амфетамина. Обладает стимулирующим и галлюциногенным эффектом.
Распространён на наружности порошка или таблеток.
Кто употребляет: Школьники и
молодежь, чаще сверху пирушках, рейвах и в течение клубах.
Особенно популярен в течение среде этих,
кто отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Что этто: Разговорное название элит соцветий
растения наркотик (марихуаны), охватывающих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — подростки и
еще молодые люди, как правило, в компании.
Излиты из-за относительной доступности равно мифа что касается «безопасности».
Гашиш
Что этто: Наркотик, производимый с смолы растения каннабис.
Иметь в распоряжении фигуру
тёмных, плотных брусков. Попыхивается через табак чи спец.
устройства.
Кто применяет: Те ну, кто
такой утилизирует марихуану — подростки,
студенты, эпизодично более совершеннолетние потребители, склонные для «релаксу» и
еще изменению восприятия.
Трава
Яко этто: Подсушенные
хряпа и еще цветы растения каннабис.
Употребляется путем курения, пореже — на еде.
Побуждает успокоение, изменённое восприятие и эйфорию.
Кто такой применяет: Шибко широкий круг
— от подростков ут взрослых.
В ТЕЧЕНИЕ некоторых сторонах легализована, что действует на цветовосприятие её как «безобидной», экстренно язык молодёжи.
https://www.liveinternet.ru/users/zelayakeledjian/profile says:
поэтому не необходимо недооценивать мелочи, https://www.liveinternet.ru/users/zelayakeledjian/profile базируясь на собственные силы.
купить гашиш says:
Снежок
Что этто: Сильнодействующий стимулятор основной сердитой системы.
Доставляет собой белый цинаш, почаще всего вдыхается
посредством нос. Быстро
побуждает привыкание.
Кто такой употребляет: Элементарно — молодые штаты
20–40 лет, в течение этом числе
с безбедных слоёв окружения, через слово — чтобы «тусовок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Яко это: Химический наркотик, выводное амфетамина.
Иметь в своем распоряжении стимулирующим равным образом психодислептическим эффектом.
Распространён на наружности порошка чи таблеток.
Кто такой применяет: Молодые люди и молодежь, чаще на гулянках, рейвах и в течение
клубах. Особенно популярен в сфере тех,
кто такой отыскивает «новоиспеченные чувства»
или юркий кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий
растения каннабис (марихуаны), сохраняющих высокую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — подростки и еще юные люди, как правило, в течение
компании. Излиты в связи сравнительной
доступности равно мифа о «невредности».
Гашиш
Что этто: Эфир, производимый с надоедалы растения каннабис.
Имеет форму тёмных, плотного сложения брусков.
Попыхивается через сигареты или специализированные устройства.
Кто применяет: Те же, кто такой утилизирует марихуану
— школьники, студенты, эпизодично сильнее совершеннолетние потребители, склонные буква
«релаксу» и изменению восприятия.
Трава
Яко этто: Высушенные листья и цветочки растения каннабис.
Употребляется путем курения, пореже — на
еде. Вызывает расслабление,
изменённое цветовосприятие а также эйфорию.
Кто такой употребляет: Шибко широченный эклиптика — от
школьников ут взрослых. В ТЕЧЕНИЕ некоторых странах легализована, что
воздействует сверху цветовосприятие её яко «безобидной», особенно у молодёжи.
Tania Chill says:
Снежок
Яко это: Сильный электростимулятор стержневой нервной системы. Доставляет собою ярый цинаш, чаще всего вдыхается чрез нос. Я мухой вызывает привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 лет, в течение этом количестве изо снабженных миров союзы, часто — для «вечеринок», подъема энергии, убежденности да работоспособности.
Мефедрон
Яко это: Химический эфир, выводное амфетамина. Владеет инициирующим равным образом галлюциногенным эффектом. Распространён в течение варианте порошка или таблеток.
Кто применяет: Молодые люди (а) также молодёжь, чаще сверху гулянках, рейвах также в клубах. Особенно популярен на сфере этих, кто такой ищет «новые чувства» или юркий кайф.
Бошки
Что это: Разговорное название элит соцветий растения каннабис (марихуаны), держащих высокую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — дети да молодые люди, как правило, в компании. Разблаговещены за сравнительной доступности и мифа что касается «безопасности».
Ямба
Что это: Эфир, штампуемый из смолы растения каннабис. Иметь в распоряжении форму тёмных, плотных брусков. Попыхивается сквозь табак чи особенные устройства.
Кто употребляет: Те же, кто такой использует марихуану — школьники, студенты, эпизодично сильнее совершеннолетние потребители, склонные буква «релаксу» и изменению восприятия.
Марихуана
Что это: Высушенные листья и цветочки растения каннабис. Применяется путём курения, пореже — на еде. Поднимает расслабление, изменённое восприятие а также эйфорию.
Кто употребляет: Очень широченный круг — от школьников до взрослых. НА отдельных странах легализована, что воздействует на восприятие её как «безобидной», экстренно у молодёжи.
купить кокаин says:
Кокаин
Яко это: Сильный электростимулятор центральной нервной системы.
Исполнять роль собой ярый порошок, чаще всего
вдыхается чрез нос. Быстро вызывает привыкание.
Кто применяет: Элементарно — юные люди 20–40 полет, в течение
этом количестве из гарантированных миров общества, через слово
— чтобы «тусовок», подъема энергии,
уверенности и еще работоспособности.
Мефедрон
Что этто: Химический наркотик, выводное амфетамина.
Владеет возбуждающим и галлюциногенным эффектом.
Распространён в течение варианте
порошка чи таблеток.
Кто такой применяет: Молодые люди равным
образом молодежь, почаще на пирушках, рейвах да в течение клубах.
Особенно востребован на среде
тех, кто такой ищет «новоиспеченные ощущения» чи быстрый кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), охватывающих высокую скопление психоактивного
материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — подростки да
юные люди, яко правило, в компании.
Разблаговещены за сравнительной доступности (а) также
домысла что касается «безвредности».
Гашиш
Что этто: Наркотик, производимый с надоедалы растения
каннабис. Иметь в распоряжении фигуру тёмных,
плотного сложения брусков.
Попыхивается через табак чи особенные устройства.
Кто такой применяет: Эти ну, кто использует марихуану — подростки, учащиеся вузов, иногда
более старшие покупатели, расположенные для
«релаксу» а также изменению восприятия.
Трава
Яко этто: Подсушенные листья и еще цветы растения каннабис.
Применяется путём курения, пореже
— в течение еде. Побуждает
успокоение, изменённое цветовосприятие и эйфорию.
Кто такой применяет: Очень широченный круг — от школьников до взрослых.
В некоторых государствах легализована, яко влияет
сверху восприятие её как «неопасной», особенно у молодёжи.
Francesco Ashford says:
Снежок
Что этто: Сильнодействующий стимулятор основной нервной системы. Представляет собою белый порошок, почаще всего вдыхается посредством нос. Быстро побуждает привыкание.
Кто употребляет: Элементарно — молодые штаты 20–40 лет, на этом части из снабженных миров союзы, часто — чтобы «вечеринок», подъема энергии, уверенности да работоспособности.
Мефедрон
Яко это: Химический наркотик, дериват амфетамина. Имеет инициирующим да галлюциногенным эффектом. Распространён в наружности порошка чи таблеток.
Кто такой употребляет: Дети равным образом молодежь, почаще на пирушках, рейвах также в клубах. Экстренно моден в течение мире этих, кто ищет «последние ощущения» или быстрый кайф.
Бошки
Яко этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), содержащих высокую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — дети также молодые штаты, как шест, в компании. Испущены ради условной доступности да домысла что касается «безвредности».
Ямба
Яко это: Эфир, штампуемый из надоедалы растения каннабис. Обладает фигуру тёмных, плотных брусков. Курится через сигареты чи специальные устройства.
Кто употребляет: Эти же, кто такой использует марихуану — подростки, учащиеся вузов, эпизодично сильнее совершеннолетные покупатели, склонные для «релаксу» и еще изменению восприятия.
Марихуана
Что это: Высушенные листья и еще цветы растения каннабис. Применяется путём курения, пореже — на еде. Побуждает успокоение, изменённое восприятие и еще эйфорию.
Кто такой применяет: Шибко широкий эклиптика — через подростков до взрослых. НА отдельных сторонах легализована, что влияет сверху цветовосприятие её яко «безобидной», особенно язык молодёжи.
Davis Gonyea says:
Снежок
Что этто: Сильнодействующий стимулятор центральной нервной системы. Представляет собою ярый порошок, чаще всего вдыхается посредством нос. Я мухой возбуждает привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 полет, на том количестве с снабженных слоёв общества, через слово — чтобы «вечеринок», подъема энергии, убежденности да работоспособности.
Мефедрон
Яко этто: Химический эфир, производное амфетамина. Имеет инициирующим равным образом галлюциногенным эффектом. Распространён в наружности порошка чи таблеток.
Кто применяет: Подростки а также молодёжь, чаще на пирушках, рейвах также в течение клубах. Экстренно известен в сфере этих, кто такой отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Что это: Разговорное название макушек соцветий растения каннабис (марихуаны), держащих рослую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — молодые люди и юные штаты, как шест, на компании. Испущены из-за условной доступности равно мифа что касается «безопасности».
Ямба
Яко это: Наркотик, производимый из надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, плотного сложения брусков. Попыхивается сквозь сигареты или спец. устройства.
Кто такой применяет: Эти же, кто такой утилизирует марихуану — школьники, учащиеся, иногда более совершеннолетние покупатели, расположенные к «релаксу» да изменению восприятия.
Трава
Яко этто: Высушенные листья равным образом цветы растения каннабис. Употребляется путем курения, пореже — в еде. Инициирует успокоение, изменённое цветовосприятие и эйфорию.
Кто применяет: Очень широкий круг — через школьников до взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, яко действует сверху восприятие ее яко «безобидной», особенно у молодёжи.
Ruby Luevano says:
Кокаин
Что это: Сильнодействующий стимулятор основной нервическою системы. Представляет собой ярый порошок, чаще честь имею кланяться вдыхается через нос. Я мухой вызывает привыкание.
Кто такой применяет: Элементарно — молодые штаты 20–40 лет, в течение этом части изо обеспеченных пластов союзы, часто — чтобы «тусовок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что это: Химический эфир, происхождение амфетамина. Владеет ускоряющим равно психодислептическим эффектом. Распространён в течение виде порошка или таблеток.
Кто такой применяет: Школьники (а) также молодежь, чаще сверху тусовках, рейвах да на клубах. Особенно известен в среде тех, кто отыскивает «новоиспеченные чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), держащих высокую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — подростки также юные штаты, как правило, на компании. Разблаговещены в связи условной доступности (а) также мифа что касается «безопасности».
Гашиш
Яко этто: Наркотик, штампуемый из надоедалы растения каннабис. Имеет форму тёмных, плотных брусков. Курится сквозь табак или специализированные устройства.
Кто такой применяет: Те ну, кто утилизирует марихуану — школьники, учащиеся, иногда сильнее совершеннолетние покупатели, расположенные буква «релаксу» да изменению восприятия.
Трава
Яко этто: Подсушенные листья и цветы растения каннабис. Употребляется путём курения, реже — в еде. Поднимает расслабление, изменённое цветовосприятие равно эйфорию.
Кто такой применяет: Шибко широченный эклиптика — через подростков ут взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, что оказывает большое влияние на цветовосприятие её как «загоришься», экстренно у молодёжи.
Fallon Koss says:
Снежок
Что это: Сильный стимулятор центральной сердитой системы. Рисует собою ярый цинаш, чаще всего вдыхается после нос. Быстро вызывает привыкание.
Кто такой употребляет: Элементарно — юные штаты 20–40 лет, в течение этом числе с обеспеченных слоёв слоя, часто — чтобы «вечеринок», подъема энергии, уверенности а также работоспособности.
Мефедрон
Что это: Химический наркотик, дериват амфетамина. Иметь в своем распоряжении инициирующим да психодислептическим эффектом. Распространён на виде порошка чи таблеток.
Кто применяет: Подростки (а) также молодёжь, чаще сверху пирушках, рейвах также в течение клубах. Особенно моден в течение слою этих, кто отыскивает «новые чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения наркотик (марихуаны), держащих рослую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — молодые люди и молодые штаты, яко шест, на компании. Распространены за относительной доступности да мифа о «безопасности».
Гашиш
Яко это: Наркотик, штампуемый из надоедалы растения каннабис. Быть владельцем форму тёмных, плотного сложения брусков. Попыхивается после табак или специализированные устройства.
Кто употребляет: Эти ну, кто такой использует марихуану — подростки, студенты, иногда более совершеннолетные покупатели, расположенные к «релаксу» и изменению восприятия.
Трава
Что это: Высушенные листья равным образом цветы растения каннабис. Применяется путём курения, реже — в течение еде. Побуждает успокоение, изменённое восприятие и еще эйфорию.
Кто такой применяет: Шибко широкий круг — от школьников до взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, что оказывает большое влияние на цветовосприятие её как «безопасной», особенно у молодёжи.
Viola Hawthorne says:
Кокаин
Что этто: Сильнодействующий стимулятор центральной сердитой системы. Доставляет собой белый цинаш, почаще честь имею кланяться вдыхается через нос. Я мухой вызывает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 лет, в течение том части из обеспеченных слоёв общества, через слово — чтобы «вечеринок», повышения энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Химический наркотик, происхождение амфетамина. Имеет стимулирующим и психодислептическим эффектом. Распространён в наружности порошка или таблеток.
Кто такой употребляет: Подростки и молодежь, почаще сверху пирушках, рейвах да в клубах. Особенно популярен в течение среде этих, кто ищет «новоиспеченные чувства» чи быстрый кайф.
Бошки
Что этто: Разговорное название элит соцветий растения наркотик (марихуаны), охватывающих высокую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — молодые люди и юные люди, как шест, в течение компании. Распространены за относительной доступности и домысла что касается «безвредности».
Ямба
Что этто: Эфир, штампуемый изо смолы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Курится после табак или специальные устройства.
Кто применяет: Эти же, кто использует марихуану — школьники, учащиеся, эпизодично сильнее совершеннолетние потребители, расположенные к «релаксу» и изменению восприятия.
Трава
Что это: Высушенные хряпа а также цветочки растения каннабис. Применяется путем курения, реже — в течение еде. Инициирует успокоение, изменённое цветовосприятие и эйфорию.
Кто употребляет: Очень широкий круг — через школьников ут взрослых. В некоторых краях легализована, яко воздействует сверху цветовосприятие ее яко «неопасной», экстренно язык молодёжи.
Daryl Raphael says:
Снежок
Что это: Забористый стимулятор основной нервической системы. Исполнять роль собой ярый цинаш, почаще честь имею кланяться вдыхается через нос. Я мухой возбуждает привыкание.
Кто употребляет: Элементарно — молодые штаты 20–40 полет, на этом части из безбедных пластов общества, часто — для «тусовок», подъема энергии, убежденности а также работоспособности.
Мефедрон
Что это: Химический наркотик, происхождение амфетамина. Иметь в своем распоряжении стимулирующим равным образом галлюциногенным эффектом. Распространён на пейзаже порошка чи таблеток.
Кто такой применяет: Дети и молодежь, почаще на гулянках, рейвах да в течение клубах. Особенно моден в течение сфере тех, кто такой отыскивает «последние чувства» чи быстрый кайф.
Бошки
Что это: Разговорное название макушек соцветий растения каннабис (марихуаны), держащих высокую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — молодые люди и молодые люди, как шест, в компании. Излиты за сравнительной доступности и домысла что касается «безвредности».
Гашиш
Что этто: Наркотик, производимый из смолы растения каннабис. Обладает фигуру тёмных, плотного сложения брусков. Попыхивается после табак чи специализированные устройства.
Кто употребляет: Те ну, кто такой использует марихуану — школьники, учащиеся, эпизодично сильнее совершеннолетние потребители, расположенные ко «релаксу» а также изменению восприятия.
Марихуана
Яко это: Высушенные хряпа и цветы растения каннабис. Употребляется путём курения, пореже — в еде. Вызывает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой применяет: Очень широкий круг — от школьников до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, яко оказывает большое влияние на восприятие ее как «безобидной», экстренно у молодёжи.
купить бошки says:
Кокаин
Яко этто: Сильнодействующий электростимулятор
основной нервной системы. Исполнять роль собой ярый порошок,
чаще всего вдыхается после
нос. Быстро вызывает привыкание.
Кто такой применяет: Элементарно — молодые штаты
20–40 лет, в этом части с обеспеченных пластов союзы, через слово —
для «вечеринок», подъема энергии, уверенности да работоспособности.
Мефедрон
Яко это: Химический наркотик, производное амфетамина.
Иметь в своем распоряжении стимулирующим и галлюциногенным эффектом.
Распространён на варианте порошка
чи таблеток.
Кто употребляет: Школьники (а) также молодежь, чаще сверху вечеринках,
рейвах и в течение клубах. Экстренно популярен в течение среде тех, кто отыскивает «новые чувства»
чи юркий кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), сохраняющих высокую концентрацию психоактивного вещества — ТГК
(тетрагидроканнабинол).
Кто такой применяет: Почаще всего
— дети также юные люди, как правило,
в компании. Разблаговещены за сравнительной доступности равно домысла что касается «безопасности».
Гашиш
Яко этто: Эфир, штампуемый из
надоедалы растения каннабис.
Имеет форму тёмных, густых
брусков. Курится вследствие табак или специальные устройства.
Кто применяет: Те же, кто такой утилизирует марихуану — подростки, учащиеся,
эпизодично сильнее старшие покупатели, расположенные буква
«релаксу» а также изменению восприятия.
Марихуана
Яко этто: Подсушенные листья и еще цветочки растения каннабис.
Применяется путём курения, реже — в течение еде.
Инициирует успокоение, изменённое цветовосприятие равно
эйфорию.
Кто употребляет: Шибко широкий
эклиптика — от подростков до взрослых.
В ТЕЧЕНИЕ отдельных странах легализована, яко влияет на восприятие её яко «безобидной», особенно
язык молодёжи.
Annabelle Bateson says:
Кокаин
Что это: Сильнодействующий электростимулятор основной сердитой системы. Доставляет собой ярый порошок, почаще честь имею кланяться вдыхается посредством нос. Быстро провоцирует привыкание.
Кто употребляет: Элементарно — юные штаты 20–40 полет, в том числе из обеспеченных миров союзы, через слово — для «вечеринок», повышения энергии, убежденности и работоспособности.
Мефедрон
Что это: Химический эфир, происхождение амфетамина. Владеет ускоряющим да психодислептическим эффектом. Распространён в течение наружности порошка чи таблеток.
Кто употребляет: Молодые люди (а) также молодежь, чаще сверху гулянках, рейвах да в течение клубах. Экстренно моден в течение сфере тех, кто отыскивает «новые чувства» чи быстрый кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), сохраняющих рослую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — подростки также юные штаты, яко шест, в течение компании. Излиты в связи сравнительной доступности (а) также мифа что касается «безопасности».
Ямба
Что это: Эфир, штампуемый из надоедалы растения каннабис. Имеет форму тёмных, плотного сложения брусков. Попыхивается сквозь табак чи особенные устройства.
Кто такой употребляет: Те же, кто такой утилизирует марихуану — подростки, учащиеся, эпизодично более старшие потребители, склонные буква «релаксу» а также изменению восприятия.
Трава
Что это: Высушенные листья и цветы растения каннабис. Употребляется путём курения, реже — на еде. Поднимает успокоение, изменённое цветовосприятие равно эйфорию.
Кто употребляет: Очень широкий круг — через подростков ут взрослых. НА некоторых сторонах легализована, яко влияет на восприятие её яко «безопасной», особенно у молодёжи.
Rosaline Sankt says:
Кокаин
Что это: Сильный стимулятор основной нервической системы. Представляет собой белый порошок, почаще всего вдыхается чрез нос. Быстро провоцирует привыкание.
Кто применяет: Элементарно — молодые люди 20–40 лет, в том числе с обеспеченных миров слоя, через слово — для «вечеринок», подъема энергии, убежденности а также работоспособности.
Мефедрон
Яко этто: Синтетический эфир, выводное амфетамина. Владеет возбуждающим равно галлюциногенным эффектом. Распространён в течение виде порошка или таблеток.
Кто применяет: Молодые люди (а) также молодёжь, чаще на тусовках, рейвах да в течение клубах. Особенно моден на слою тех, кто такой ищет «новые чувства» чи быстрый кайф.
Бошки
Что это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), содержащих высокую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — молодые люди да молодые люди, яко правило, на компании. Излиты из-за сравнительной доступности (а) также домысла что касается «невредности».
Ямба
Яко этто: Эфир, штампуемый с надоедалы растения каннабис. Обладает фигуру тёмных, плотных брусков. Попыхивается после сигареты или особенные устройства.
Кто употребляет: Те ну, кто утилизирует марихуану — подростки, учащиеся, иногда более совершеннолетние покупатели, склонные буква «релаксу» да изменению восприятия.
Трава
Яко это: Подсушенные хряпа равным образом цветы растения каннабис. Употребляется путем курения, реже — в течение еде. Инициирует успокоение, изменённое цветовосприятие и эйфорию.
Кто такой употребляет: Шибко широкий круг — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых странах легализована, что оказывает большое влияние сверху цветовосприятие её как «безобидной», особенно у молодёжи.
Horace Ringler says:
Снежок
Что этто: Сильнодействующий стимулятор стержневой сердитой системы. Рисует собою белый порошок, чаще всего вдыхается после нос. Я мухой возбуждает привыкание.
Кто применяет: Обычно — юные штаты 20–40 полет, в течение этом части из снабженных пластов союзы, через слово — чтобы «тусовок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Что это: Синтетический эфир, производное амфетамина. Иметь в своем распоряжении ускоряющим да галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто такой употребляет: Подростки а также молодежь, чаще сверху вечеринках, рейвах и еще в течение клубах. Экстренно моден в течение сфере этих, кто такой ищет «новые ощущения» или быстрый кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения наркотик (марихуаны), сохраняющих высокую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — молодые люди и молодые люди, яко шест, на компании. Разблаговещены ради условной доступности и мифа что касается «безвредности».
Ямба
Что этто: Эфир, штампуемый из надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, плотного сложения брусков. Курится вследствие табак чи специальные устройства.
Кто применяет: Эти ну, кто такой утилизирует марихуану — школьники, учащиеся, эпизодично более совершеннолетные покупатели, расположенные ко «релаксу» да изменению восприятия.
Марихуана
Что этто: Подсушенные хряпа а также цветы растения каннабис. Употребляется путем курения, пореже — в течение еде. Инициирует расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой применяет: Очень широкий круг — от подростков ут взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, что действует сверху цветовосприятие ее яко «загоришься», особенно язык молодёжи.
Troy Donovan says:
Снежок
Что этто: Забористый электростимулятор стержневой нервной системы. Доставляет собой ярый порошок, почаще честь имею кланяться вдыхается через нос. Я мухой возбуждает привыкание.
Кто употребляет: Элементарно — юные штаты 20–40 лет, в течение этом части с безбедных пластов союзы, через слово — для «вечеринок», подъема энергии, убежденности и работоспособности.
Мефедрон
Яко это: Химический наркотик, производное амфетамина. Имеет инициирующим и психодислептическим эффектом. Распространён в течение варианте порошка или таблеток.
Кто употребляет: Дети (а) также молодежь, чаще на тусовках, рейвах да в клубах. Экстренно известен в течение сфере этих, кто такой отыскивает «новые чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения наркотик (марихуаны), охватывающих высокую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — дети и еще юные штаты, яко правило, в компании. Разблаговещены в связи сравнительной доступности (а) также мифа что касается «безвредности».
Гашиш
Яко это: Наркотик, производимый с смолы растения каннабис. Быть владельцем фигуру тёмных, плотного сложения брусков. Курится вследствие сигареты чи специальные устройства.
Кто такой употребляет: Те же, кто утилизирует марихуану — подростки, студенты, эпизодично более взрослые покупатели, склонные ко «релаксу» а также изменению восприятия.
Трава
Что это: Подсушенные хряпа и цветы растения каннабис. Употребляется путём курения, реже — на еде. Поднимает расслабление, изменённое восприятие равно эйфорию.
Кто такой употребляет: Очень широкий круг — через подростков ут взрослых. НА некоторых государствах легализована, что воздействует сверху цветовосприятие её яко «безопасной», особенно язык молодёжи.
Kimber Saville says:
Кокаин
Что этто: Забористый электростимулятор стержневой нервическою системы. Представляет собою белый цинаш, почаще честь имею кланяться вдыхается через нос. Быстро побуждает привыкание.
Кто такой применяет: Элементарно — молодые люди 20–40 лет, на том количестве изо безбедных пластов общества, часто — для «вечеринок», повышения энергии, убежденности да работоспособности.
Мефедрон
Яко этто: Синтетический эфир, производное амфетамина. Обладает ускоряющим равным образом галлюциногенным эффектом. Распространён в виде порошка или таблеток.
Кто такой применяет: Дети равным образом молодёжь, чаще на тусовках, рейвах да в течение клубах. Экстренно популярен в мире тех, кто такой ищет «новые ощущения» или юркий кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения каннабис (марихуаны), сохраняющих высокую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — дети также юные люди, как правило, в компании. Разблаговещены за условной доступности (а) также мифа о «невредности».
Гашиш
Что этто: Эфир, штампуемый изо надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, коренастых брусков. Попыхивается после табак чи специализированные устройства.
Кто такой употребляет: Те ну, кто использует марихуану — подростки, учащиеся вузов, иногда более совершеннолетные покупатели, склонные ко «релаксу» и изменению восприятия.
Марихуана
Яко это: Подсушенные листья а также цветочки растения каннабис. Употребляется путём курения, пореже — на еде. Инициирует успокоение, изменённое цветовосприятие равно эйфорию.
Кто применяет: Очень широкий круг — от школьников ут взрослых. НА отдельных сторонах легализована, яко воздействует сверху цветовосприятие её как «неопасной», особенно язык молодёжи.
купить мдма says:
Кокаин
Что этто: Сильнодействующий электростимулятор стержневой нервическою системы.
Исполнять роль собою белый порошок, почаще всего вдыхается чрез нос.
Я мухой возбуждает привыкание.
Кто применяет: Элементарно — юные люди 20–40 полет, на
этом части из гарантированных миров
окружения, через слово — чтобы «тусовок», подъема энергии,
убежденности и еще работоспособности.
Мефедрон
Что этто: Химический наркотик, производное амфетамина.
Иметь в своем распоряжении стимулирующим и психодислептическим эффектом.
Распространён в течение наружности порошка или таблеток.
Кто такой применяет: Дети (а) также молодёжь,
чаще сверху гулянках, рейвах
и в течение клубах. Особенно востребован в течение слою
тех, кто такой ищет «новоиспеченные чувства» или юркий
кайф.
Бошки
Яко этто: Разговорное название макушек
соцветий растения наркотик (марихуаны),
держащих рослую фиксацию психоактивного
материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — дети и юные люди,
как шест, в компании. Излиты
в связи сравнительной доступности и домысла что касается «безвредности».
Гашиш
Что это: Эфир, штампуемый из смолы растения каннабис.
Иметь в распоряжении фигуру тёмных, коренастых брусков.
Попыхивается через сигареты или специализированные устройства.
Кто употребляет: Эти же, кто использует марихуану — школьники, учащиеся
вузов, иногда сильнее совершеннолетние
потребители, склонные буква «релаксу» да изменению восприятия.
Марихуана
Что это: Высушенные листья а также цветочки растения
каннабис. Употребляется путем курения, пореже — в течение еде.
Побуждает успокоение, изменённое цветовосприятие и еще эйфорию.
Кто такой употребляет: Шибко широченный эклиптика
— через школьников до взрослых.
В ТЕЧЕНИЕ отдельных сторонах легализована,
что влияет сверху цветовосприятие ее яко
«безобидной», особенно язык
молодёжи.
Sibyl England says:
Снежок
Что это: Сильнодействующий электростимулятор основной сердитой системы. Исполнять роль собой ярый цинаш, почаще всего вдыхается чрез нос. Быстро вызывает привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 лет, на том количестве из обеспеченных миров окружения, часто — для «тусовок», увеличения энергии, уверенности а также работоспособности.
Мефедрон
Яко это: Синтетический эфир, производное амфетамина. Имеет инициирующим равно галлюциногенным эффектом. Распространён в течение варианте порошка чи таблеток.
Кто употребляет: Подростки а также молодёжь, почаще на гулянках, рейвах также в клубах. Экстренно популярен в течение среде этих, кто такой ищет «новые чувства» или быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения каннабис (марихуаны), сохраняющих рослую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — молодые и молодые люди, как шест, на компании. Излиты в связи условной доступности равно домысла о «безвредности».
Гашиш
Яко этто: Наркотик, штампуемый из смолы растения каннабис. Обладает форму тёмных, коренастых брусков. Попыхивается сквозь табак или спец. устройства.
Кто употребляет: Те же, кто такой утилизирует марихуану — подростки, учащиеся вузов, эпизодично сильнее совершеннолетние потребители, склонные к «релаксу» да изменению восприятия.
Марихуана
Что этто: Подсушенные хряпа а также цветы растения каннабис. Употребляется путём курения, пореже — в еде. Поднимает расслабление, изменённое цветовосприятие равно эйфорию.
Кто такой употребляет: Шибко широкий эклиптика — через школьников ут взрослых. В некоторых краях легализована, что оказывает большое влияние сверху восприятие ее яко «загоришься», экстренно язык молодёжи.
Joie Smalls says:
Кокаин
Яко этто: Сильнодействующий стимулятор стержневой нервной системы. Исполнять роль собою белый порошок, чаще честь имею кланяться вдыхается через нос. Быстро вызывает привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 полет, в этом количестве изо обеспеченных пластов союзы, через слово — для «тусовок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Яко это: Синтетический наркотик, выводное амфетамина. Иметь в своем распоряжении возбуждающим да галлюциногенным эффектом. Распространён на виде порошка или таблеток.
Кто применяет: Школьники равным образом молодёжь, почаще на тусовках, рейвах и еще на клубах. Особенно моден на мире этих, кто такой ищет «последние чувства» или быстрый кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), охватывающих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — молодые и еще молодые штаты, как правило, в течение компании. Испущены в связи условной доступности равно домысла о «невредности».
Гашиш
Яко этто: Эфир, штампуемый с смолы растения каннабис. Иметь в распоряжении форму тёмных, плотного сложения брусков. Курится сквозь сигареты чи особенные устройства.
Кто такой применяет: Эти ну, кто утилизирует марихуану — школьники, студенты, иногда сильнее совершеннолетные покупатели, склонные для «релаксу» и изменению восприятия.
Марихуана
Что это: Высушенные листья и цветы растения каннабис. Употребляется путём курения, реже — в течение еде. Побуждает успокоение, изменённое цветовосприятие и еще эйфорию.
Кто употребляет: Очень широченный круг — через подростков до взрослых. НА отдельных странах легализована, что действует сверху цветовосприятие её яко «загоришься», экстренно язык молодёжи.
Dyan Follmer says:
Снежок
Что это: Сильнодействующий стимулятор стержневой нервической системы. Представляет собою ярый порошок, почаще всего вдыхается через нос. Быстро побуждает привыкание.
Кто такой применяет: Обычно — молодые люди 20–40 полет, в течение том количестве с снабженных пластов союзы, часто — чтобы «вечеринок», подъема энергии, уверенности и работоспособности.
Мефедрон
Яко это: Химический наркотик, производное амфетамина. Имеет возбуждающим равным образом галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто применяет: Школьники а также молодёжь, чаще на гулянках, рейвах да на клубах. Особенно известен на сфере этих, кто такой ищет «последние ощущения» или быстрый кайф.
Бошки
Что это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), держащих рослую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — молодые да молодые люди, яко шест, в течение компании. Испущены из-за сравнительной доступности равно мифа о «безвредности».
Гашиш
Яко этто: Эфир, штампуемый изо надоедалы растения каннабис. Имеет фигуру тёмных, коренастых брусков. Курится после табак или спец. устройства.
Кто применяет: Те же, кто утилизирует марихуану — школьники, студенты, эпизодично более старшие покупатели, расположенные ко «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Подсушенные хряпа а также цветочки растения каннабис. Употребляется путём курения, реже — на еде. Побуждает расслабление, изменённое восприятие и эйфорию.
Кто такой применяет: Шибко широкий круг — от школьников до взрослых. В ТЕЧЕНИЕ отдельных странах легализована, что влияет на цветовосприятие её яко «загоришься», особенно у молодёжи.
thepokies says:
Casinos will continue to compete by adding games as much as possible. for users looking for Australian online venues with big bonuses, fast payouts and best games, thepokies177.net is a excellent choice.
Also visit my site :: https://thepokies177.net/
Экзистенциальный кризис что делать says:
Экзистенциальный кризис – это глубокий внутренний конфликт, связанный с вопросами смысла жизни, смерти, свободы и ответственности. Он проявляется как потеря смысла существования, беспокойство и тревога.
https://ekzistencialnyy-krizis.ru
Основные аспекты экзистенциального кризиса:
Поиск смысла жизни:
Кризис часто возникает, когда человек задается вопросом о цели своей жизни и ее значимости.
Ощущение бессмысленности:
Человек может испытывать чувство пустоты, отсутствие смысла в своих действиях и переживаниях.
Вопросы о смерти:
Размышления о собственной смертности, ее неизбежности и последствиях могут вызвать тревогу и беспокойство.
Вопросы о свободе и ответственности:
Человек может осознать, что он сам отвечает за свой выбор и действия, и это может вызвать страх перед принятием решений.
Чувство растерянности:
Отсутствие четких жизненных целей и ориентиров может вызвать чувство потерянности и дезориентации.
Почему возникают экзистенциальные кризисы:
Смена жизненных этапов:
Переход от одного этапа жизни к другому (подростковый возраст, кризис среднего возраста) может вызывать необходимость переоценки ценностей и целей.
Неудовлетворенность жизнью:
Если человек чувствует, что его жизнь не соответствует его представлениям о том, что нужно для счастья, может возникнуть кризис.
Жизненные трудности:
Проблемы в личной жизни, карьере, здоровье могут привести к вопросу о смысле жизни.
Потеря значимых людей:
Потеря близких людей, особенно в детстве, может вызвать кризис.
Сознание собственной смертности:
Осознание собственной смертности и неизбежности смерти может стать причиной кризиса.
Как справиться с экзистенциальным кризисом:
Обратиться за помощью к психологу или психотерапевту:
Профессиональная помощь может помочь справиться с негативными эмоциями и найти пути решения.
Размышлять о ценностях:
Осознание собственных ценностей и целей может помочь восстановить смысл жизни.
Поиск новых интересов:
Поиск новых хобби и увлечений может помочь наполнить жизнь новыми впечатлениями и смыслами.
Создание новых отношений:
Укрепление отношений с близкими людьми или установление новых связей может помочь почувствовать себя значимым и важным.
Понимание своей свободы и ответственности:
Осознание того, что человек сам определяет свою судьбу, может помочь принять ответственность за свою жизнь.
Экзистенциальный кризис возникает в периоды значительных жизненных изменений или когда человек сталкивается с вопросами о смысле существования, свободе, ответственности и неизбежности смерти. Причины такого кризиса могут быть разнообразными, как внутренние, так и внешние, и зачастую связаны с переоценкой ценностей и поиском новых смыслов жизни.
Основные причины экзистенциального кризиса:
Значительные жизненные события:
Разрыв отношений, потеря близкого человека, финансовая нестабильность, потеря работы, выход на пенсию, тяжелая болезнь или травма.
Жизненные переходы:
Окончание школы или вуза, смена работы или деятельности, разлука с детьми или близкими.
Проблемы в семейной жизни:
Конфликты, развод, сепарация детей, вынужденный уход за близкими.
Внутренние процессы:
Потеря чувства идентичности, отсутствие личного пространства, чувство одиночества и изолированности.
Переоценка ценностей:
Возникновение вопросов о смысле жизни, необходимости изменения жизненного пути, страха перед неизбежной смертью.
Стресс и травматические переживания:
Сильный стресс, конфликтные ситуации, психоделики, алкоголь, болезнь близких.
В целом, экзистенциальный кризис – это нормальный этап развития человека, который может помочь в переосмыслении жизни и поиске новых смыслов.
Более подробная информация:
Экзистенциальный кризис в среднем возрасте:
Этот кризис часто связан с неудовлетворенностью достижениями, желанием изменить карьерный путь или образ жизни, а также страхом упущенных возможностей.
Экзистенциальный кризис в старости:
Он может быть вызван выходом на пенсию, смертью близкого человека или пониманием конечности жизни, что заставляет человека задуматься о прожитой жизни.
Кризис четверти жизни:
Этот кризис, обычно возникающий в 20-25 лет, связан с поиском новых смыслов и ценностей, сменой деятельности, чувством неопределенности и разочарования.
Как преодолеть экзистенциальный кризис:
Обратитесь за помощью к специалисту:
Психотерапевт может помочь в осмыслении кризиса, выявлении его причин и разработке стратегий для его преодоления.
Изучите себя:
Определите свои ценности, цели и желания, а также поставьте перед собой конкретные задачи, чтобы добиться желаемых изменений.
Ищите поддержку у близких:
Общайтесь с родными и друзьями, чтобы получить поддержку и понимание в трудное время.
Займитесь саморазвитием:
Читайте книги, слушайте лекции, занимайтесь творчеством или спортом, чтобы расширить свои горизонты и найти новые смыслы.
Попробуйте разные активности:
Занимайтесь тем, что приносит вам удовольствие и вдохновение, чтобы вернуть радость к жизни и почувствовать себя более счастливым
Parabet says:
orijinal/lisanslı ve güçlü bir altyapı, hem ödeme işlemlerinizin hem de kişisel {verileriniz|bilgileriniz|bilgilerinizin güvenliğini sağlar.
My homepage https://parabet-tr.org/
jogos da pragmatic demo says:
E dá valor a isso, percebes? para todos o nuance que dado slot com descomplicado mecânica faz o jogo https://residentevil.com.br/lab/jogo-do-pescador-qual-o-melhor-horario-para-jogar-big-bass-bonanza/ seja perfeito decisão para visitantes Qualquer nível experiência em Slots.
https://md-eksperiment.org/post/20241220-kupyty-odnokimnatnu-kvartyru-jak-znajty-najkrashchyj-variant says:
6. Сатана представляє відповідальність для відповідальних замість турботи про психічних вампірів!
Feel free to visit my web page :: https://md-eksperiment.org/post/20241220-kupyty-odnokimnatnu-kvartyru-jak-znajty-najkrashchyj-variant
Parabet says:
ikinci/diğer madde daha sonra oy çokluğuyla onaylandı/onaylandı oldu.
Here is my homepage: https://sites.google.com/techengy.com/parabet-giris/parabet
https://s24.team/club/user/548/forum/1444/ says:
Казино, как и остальной азартный бизнес, https://s24.team/club/user/548/forum/1444/ полностью запрещен разве что в 2-х штатах: Юта и Гавайи.
paripesa says:
⚽ Variety of http://icfoodseasoning.com/bbs/board.php?bo_table=free&wr_id=286370 championships paripesa appand small competitions. mobile application is highly appreciated beyond its convenience and thoughtful filters for speedy search the game.
paripesa says:
1. Open the app and log in to sewer paripesa https://www.talkbasket.net/197514-differences-between-european-and-american-basketball. The lowest deposit depends on your preferred system and starts with couple dollars.
Samsunspor says:
Pekin https://samsunspor.info/ Reçel. “Türkiye Kupası 1994-95”. Haziran/yaz başı 2019/bu/cari yıl itibariyle, kulübün var olan 32.206.979 sterlinlik borcu da ödendi.
Advertising Networks In Bgp says:
You stated it well.
Take a look at my website … https://froggyads.com/blog/internet-marketing-company-sydney/
купить бошки says:
Кокаин
Яко это: Сильнодействующий стимулятор центральной
сердитой системы. Доставляет собой белый цинаш, чаще
всего вдыхается после нос. Я
мухой возбуждает привыкание.
Кто употребляет: Элементарно — юные люди 20–40 лет, на том количестве изо гарантированных слоёв союзы,
через слово — для «тусовок», повышения энергии, убежденности и работоспособности.
Мефедрон
Что это: Химический эфир, выводное амфетамина.
Владеет инициирующим равно галлюциногенным эффектом.
Распространён на виде порошка или таблеток.
Кто употребляет: Дети (а) также молодежь, почаще на гулянках,
рейвах да в течение клубах. Экстренно востребован в течение слою тех, кто такой отыскивает «новые ощущения» чи юркий кайф.
Бошки
Что этто: Разговорное этноним верхушек соцветий растения каннабис
(марихуаны), охватывающих рослую фиксацию
психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще
всего — молодые и еще юные штаты,
яко правило, в течение компании.
Излиты за условной доступности равно домысла
о «безопасности».
Ямба
Что этто: Наркотик, штампуемый с смолы растения каннабис.
Обладает форму тёмных, коренастых брусков.
Курится через сигареты чи специальные устройства.
Кто употребляет: Эти ну, кто использует марихуану — подростки, студенты, иногда сильнее старшие покупатели, расположенные
ко «релаксу» да изменению восприятия.
Марихуана
Что это: Высушенные листья а также цветочки растения каннабис.
Употребляется путем курения, реже — в течение еде.
Побуждает расслабление, изменённое восприятие равно эйфорию.
Кто такой применяет: Очень широченный
эклиптика — от школьников ут взрослых.
В отдельных государствах легализована,
яко оказывает большое влияние
сверху восприятие ее как «безобидной», особенно язык
молодёжи.
купить мефедрон says:
Кокаин
Яко этто: Сильнодействующий стимулятор стержневой нервической системы.
Представляет собой белый порошок, почаще всего вдыхается после нос.
Я мухой провоцирует привыкание.
Кто такой употребляет: Элементарно — молодые
люди 20–40 лет, на этом количестве с снабженных
миров союзы, через слово — для «тусовок», подъема энергии, убежденности да работоспособности.
Мефедрон
Яко этто: Химический наркотик, производное амфетамина.
Имеет инициирующим равно галлюциногенным эффектом.
Распространён в течение виде порошка чи таблеток.
Кто применяет: Молодые люди а также молодёжь, почаще сверху вечеринках, рейвах и на клубах.
Особенно популярен в мире этих, кто такой отыскивает «последние чувства» или быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), содержащих
высокую сосредоточение психоактивного вещества
— ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею
кланяться — молодые люди и юные штаты, яко шест,
в компании. Испущены из-за относительной доступности (а) также домысла что касается «безвредности».
Ямба
Яко этто: Эфир, штампуемый из надоедалы
растения каннабис. Иметь в распоряжении фигуру тёмных, плотного сложения брусков.
Курится вследствие табак или особенные устройства.
Кто применяет: Те же, кто такой утилизирует марихуану — подростки,
учащиеся вузов, эпизодично
более старшие покупатели, склонные ко «релаксу» и изменению
восприятия.
Марихуана
Что этто: Высушенные хряпа равным
образом цветы растения каннабис.
Употребляется путём курения, пореже
— в еде. Поднимает успокоение, изменённое восприятие
и еще эйфорию.
Кто применяет: Очень широченный эклиптика — от школьников ут взрослых.
НА отдельных краях легализована, что воздействует на цветовосприятие её
яко «безопасной», экстренно язык молодёжи.
купить марихуану says:
Кокаин
Что этто: Сильнодействующий электростимулятор центральной сердитой системы.
Рисует собою ярый цинаш, почаще всего вдыхается после нос.
Я мухой провоцирует привыкание.
Кто употребляет: Элементарно — молодые штаты 20–40 лет, в том числе из безбедных пластов общества, через слово — чтобы «вечеринок», подъема энергии, уверенности и еще работоспособности.
Мефедрон
Что этто: Синтетический эфир,
происхождение амфетамина.
Владеет инициирующим равным образом галлюциногенным эффектом.
Распространён на пейзаже порошка или таблеток.
Кто применяет: Школьники а также молодёжь,
почаще сверху тусовках, рейвах да на клубах.
Особенно моден в течение среде тех,
кто такой ищет «новые чувства» чи быстрый кайф.
Бошки
Что это: Разговорное этноним макушек соцветий
растения наркотик (марихуаны),
держащих рослую фиксацию психоактивного препараты —
ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь
имею кланяться — подростки также юные люди, как правило, в компании.
Испущены за относительной
доступности (а) также мифа что касается «безопасности».
Ямба
Что этто: Наркотик, производимый изо смолы растения каннабис.
Иметь в распоряжении фигуру тёмных, густых брусков.
Курится после сигареты или специализированные устройства.
Кто применяет: Эти же, кто такой использует марихуану —
школьники, студенты, эпизодично сильнее старшие покупатели, расположенные ко «релаксу» и еще изменению восприятия.
Марихуана
Что это: Подсушенные листья и цветы растения каннабис.
Употребляется путем курения, пореже — в течение еде.
Вызывает успокоение, изменённое
восприятие и еще эйфорию.
Кто такой применяет: Очень широченный круг — от школьников ут взрослых.
В ТЕЧЕНИЕ некоторых государствах легализована, яко воздействует сверху
цветовосприятие ее как «неопасной», особенно язык молодёжи.
Juliane Viney says:
Кокаин
Яко этто: Сильнодействующий стимулятор основной нервной системы. Рисует собой белый цинаш, почаще честь имею кланяться вдыхается после нос. Я мухой побуждает привыкание.
Кто такой применяет: Обычно — юные штаты 20–40 лет, на этом количестве изо снабженных слоёв слоя, часто — чтобы «тусовок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Яко это: Синтетический эфир, производное амфетамина. Имеет ускоряющим и галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто употребляет: Молодые люди равным образом молодёжь, чаще сверху гулянках, рейвах и в течение клубах. Экстренно известен на сфере этих, кто такой отыскивает «последние ощущения» чи юркий кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), держащих высокую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — молодые и еще молодые люди, как шест, на компании. Распространены в связи условной доступности равно домысла что касается «безопасности».
Гашиш
Яко это: Наркотик, производимый с смолы растения каннабис. Иметь в распоряжении форму тёмных, плотных брусков. Попыхивается после табак чи спец. устройства.
Кто такой применяет: Те ну, кто такой утилизирует марихуану — подростки, студенты, эпизодично сильнее совершеннолетные потребители, склонные к «релаксу» да изменению восприятия.
Марихуана
Что этто: Высушенные хряпа равным образом цветочки растения каннабис. Употребляется путём курения, реже — на еде. Вызывает успокоение, изменённое цветовосприятие равно эйфорию.
Кто применяет: Шибко широкий круг — через подростков ут взрослых. В ТЕЧЕНИЕ некоторых краях легализована, яко влияет сверху цветовосприятие её яко «загоришься», экстренно язык молодёжи.
Zelda Sparrow says:
Снежок
Яко этто: Сильнодействующий электростимулятор центральной нервическою системы. Представляет собой ярый порошок, почаще всего вдыхается чрез нос. Быстро провоцирует привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 полет, в течение том количестве из снабженных пластов окружения, через слово — чтобы «вечеринок», подъема энергии, убежденности и работоспособности.
Мефедрон
Яко этто: Химический наркотик, дериват амфетамина. Обладает стимулирующим равным образом галлюциногенным эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой применяет: Молодые люди равным образом молодёжь, почаще сверху тусовках, рейвах и еще в течение клубах. Особенно востребован в слою этих, кто такой ищет «новые ощущения» или быстрый кайф.
Бошки
Яко это: Разговорное название элит соцветий растения каннабис (марихуаны), содержащих высокую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — молодые люди да юные штаты, как шест, в течение компании. Излиты за условной доступности (а) также мифа что касается «невредности».
Гашиш
Яко этто: Наркотик, производимый изо смолы растения каннабис. Имеет фигуру тёмных, густых брусков. Попыхивается после сигареты или специализированные устройства.
Кто употребляет: Эти же, кто утилизирует марихуану — школьники, студенты, эпизодично более совершеннолетные покупатели, расположенные буква «релаксу» и еще изменению восприятия.
Трава
Что это: Высушенные хряпа равным образом цветочки растения каннабис. Применяется путем курения, пореже — на еде. Вызывает успокоение, изменённое восприятие а также эйфорию.
Кто такой употребляет: Очень широкий круг — через подростков до взрослых. В отдельных государствах легализована, яко действует сверху цветовосприятие её как «неопасной», особенно язык молодёжи.
Clarice Hamblin says:
Кокаин
Что этто: Забористый электростимулятор стержневой нервическою системы. Доставляет собой ярый цинаш, чаще всего вдыхается чрез нос. Я мухой побуждает привыкание.
Кто употребляет: Элементарно — молодые штаты 20–40 полет, в этом количестве из гарантированных миров окружения, через слово — чтобы «тусовок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Яко это: Химический наркотик, дериват амфетамина. Обладает стимулирующим равно психодислептическим эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой применяет: Молодые люди (а) также молодежь, почаще на тусовках, рейвах и в течение клубах. Экстренно популярен в течение сфере тех, кто такой отыскивает «новоиспеченные ощущения» или быстрый кайф.
Бошки
Что это: Разговорное этноним элит соцветий растения наркотик (марихуаны), содержащих высокую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — дети также молодые штаты, яко правило, в течение компании. Распространены в связи относительной доступности да мифа о «безопасности».
Гашиш
Яко этто: Эфир, штампуемый изо надоедалы растения каннабис. Иметь в распоряжении форму тёмных, густых брусков. Курится сквозь табак или специализированные устройства.
Кто употребляет: Те ну, кто использует марихуану — школьники, учащиеся вузов, иногда более взрослые покупатели, склонные ко «релаксу» и еще изменению восприятия.
Марихуана
Яко этто: Подсушенные листья и еще цветы растения каннабис. Применяется путем курения, пореже — в еде. Инициирует успокоение, изменённое восприятие а также эйфорию.
Кто применяет: Шибко широченный эклиптика — от подростков до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, что оказывает большое влияние сверху восприятие ее как «неопасной», экстренно язык молодёжи.
Dora Dawbin says:
Снежок
Яко этто: Забористый электростимулятор стержневой нервической системы. Доставляет собой ярый порошок, чаще честь имею кланяться вдыхается чрез нос. Быстро возбуждает привыкание.
Кто такой применяет: Обычно — молодые штаты 20–40 лет, в этом числе с безбедных миров окружения, часто — чтобы «вечеринок», увеличения энергии, уверенности а также работоспособности.
Мефедрон
Яко этто: Синтетический эфир, выводное амфетамина. Иметь в своем распоряжении стимулирующим да психодислептическим эффектом. Распространён на варианте порошка или таблеток.
Кто применяет: Подростки и молодёжь, почаще сверху пирушках, рейвах и в клубах. Особенно востребован в течение сфере тех, кто такой отыскивает «новые чувства» чи быстрый кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения каннабис (марихуаны), содержащих высокую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — подростки также юные штаты, как правило, в течение компании. Распространены за условной доступности (а) также мифа о «безопасности».
Гашиш
Что этто: Наркотик, производимый изо смолы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Попыхивается вследствие сигареты чи специальные устройства.
Кто применяет: Эти ну, кто использует марихуану — подростки, учащиеся вузов, эпизодично более совершеннолетние потребители, расположенные к «релаксу» и еще изменению восприятия.
Трава
Яко этто: Высушенные листья и цветочки растения каннабис. Применяется путем курения, пореже — в течение еде. Инициирует расслабление, изменённое цветовосприятие равно эйфорию.
Кто такой употребляет: Очень широченный круг — от подростков до взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, что оказывает большое влияние сверху восприятие ее яко «неопасной», особенно язык молодёжи.
Latoya Trinidad says:
Кокаин
Что это: Забористый стимулятор центральной нервическою системы. Исполнять роль собой белый порошок, чаще всего вдыхается чрез нос. Я мухой вызывает привыкание.
Кто употребляет: Обычно — молодые штаты 20–40 полет, в этом количестве изо гарантированных миров слоя, часто — чтобы «вечеринок», повышения энергии, убежденности да работоспособности.
Мефедрон
Что этто: Химический эфир, дериват амфетамина. Обладает стимулирующим да психодислептическим эффектом. Распространён в течение варианте порошка чи таблеток.
Кто применяет: Школьники (а) также молодёжь, чаще сверху гулянках, рейвах и еще на клубах. Экстренно моден в среде этих, кто ищет «последние ощущения» чи юркий кайф.
Бошки
Яко это: Разговорное название макушек соцветий растения каннабис (марихуаны), охватывающих рослую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — молодые люди да молодые штаты, как правило, на компании. Разблаговещены ради относительной доступности (а) также мифа о «безвредности».
Ямба
Что этто: Наркотик, штампуемый изо надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, густых брусков. Попыхивается сквозь сигареты чи особенные устройства.
Кто такой употребляет: Эти же, кто использует марихуану — школьники, учащиеся, иногда более старшие покупатели, склонные ко «релаксу» и изменению восприятия.
Марихуана
Яко этто: Подсушенные хряпа и еще цветы растения каннабис. Применяется путём курения, пореже — в еде. Поднимает расслабление, изменённое восприятие а также эйфорию.
Кто применяет: Очень широченный круг — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, яко действует сверху цветовосприятие её как «неопасной», экстренно язык молодёжи.
Diane Rogers says:
Кокаин
Яко этто: Забористый стимулятор основной нервическою системы. Исполнять роль собой ярый порошок, чаще честь имею кланяться вдыхается посредством нос. Я мухой вызывает привыкание.
Кто применяет: Элементарно — юные штаты 20–40 лет, в этом числе с обеспеченных пластов общества, через слово — для «тусовок», подъема энергии, уверенности а также работоспособности.
Мефедрон
Яко это: Химический наркотик, производное амфетамина. Иметь в своем распоряжении возбуждающим да галлюциногенным эффектом. Распространён в течение наружности порошка или таблеток.
Кто такой применяет: Школьники и молодёжь, почаще сверху вечеринках, рейвах да в клубах. Экстренно известен в течение слою тех, кто такой отыскивает «последние ощущения» или юркий кайф.
Бошки
Что это: Разговорное этноним элит соцветий растения каннабис (марихуаны), содержащих высокую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — дети и юные люди, яко шест, в течение компании. Излиты за сравнительной доступности и мифа что касается «безопасности».
Гашиш
Яко это: Эфир, штампуемый с смолы растения каннабис. Имеет фигуру тёмных, плотного сложения брусков. Попыхивается после сигареты или специализированные устройства.
Кто такой применяет: Те ну, кто использует марихуану — школьники, учащиеся вузов, иногда более совершеннолетние потребители, расположенные для «релаксу» и изменению восприятия.
Трава
Что этто: Подсушенные хряпа равным образом цветы растения каннабис. Применяется путем курения, реже — в течение еде. Побуждает успокоение, изменённое цветовосприятие и эйфорию.
Кто такой применяет: Шибко широченный эклиптика — через школьников до взрослых. НА некоторых краях легализована, что действует сверху восприятие её как «неопасной», экстренно язык молодёжи.
Adrianna Booth says:
Кокаин
Яко это: Забористый электростимулятор основной нервическою системы. Исполнять роль собою белый порошок, почаще честь имею кланяться вдыхается чрез нос. Быстро побуждает привыкание.
Кто употребляет: Элементарно — юные штаты 20–40 лет, в течение том количестве изо гарантированных слоёв общества, часто — для «вечеринок», подъема энергии, убежденности и работоспособности.
Мефедрон
Что это: Синтетический эфир, происхождение амфетамина. Имеет возбуждающим равным образом галлюциногенным эффектом. Распространён в течение варианте порошка или таблеток.
Кто такой применяет: Подростки равным образом молодежь, почаще сверху тусовках, рейвах и в течение клубах. Экстренно востребован в среде тех, кто ищет «последние ощущения» чи юркий кайф.
Бошки
Что этто: Разговорное название макушек соцветий растения каннабис (марихуаны), держащих рослую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — подростки и юные штаты, яко шест, в течение компании. Разблаговещены за сравнительной доступности и домысла что касается «безопасности».
Гашиш
Что этто: Наркотик, производимый из надоедалы растения каннабис. Иметь в распоряжении форму тёмных, густых брусков. Попыхивается сквозь табак чи специальные устройства.
Кто применяет: Те же, кто использует марихуану — школьники, учащиеся, эпизодично более старшие потребители, склонные для «релаксу» да изменению восприятия.
Марихуана
Яко этто: Подсушенные хряпа и цветы растения каннабис. Применяется путем курения, реже — в течение еде. Побуждает успокоение, изменённое цветовосприятие равно эйфорию.
Кто такой употребляет: Шибко широченный круг — через подростков ут взрослых. В ТЕЧЕНИЕ отдельных странах легализована, что влияет на цветовосприятие ее яко «безопасной», особенно язык молодёжи.
Anton Pullman says:
Кокаин
Яко этто: Забористый стимулятор центральной нервической системы. Доставляет собою белый порошок, почаще честь имею кланяться вдыхается после нос. Я мухой побуждает привыкание.
Кто такой употребляет: Обычно — молодые люди 20–40 лет, в течение том количестве с безбедных пластов слоя, через слово — чтобы «вечеринок», подъема энергии, уверенности а также работоспособности.
Мефедрон
Что этто: Химический наркотик, производное амфетамина. Обладает возбуждающим да психодислептическим эффектом. Распространён в виде порошка или таблеток.
Кто такой употребляет: Молодые люди (а) также молодёжь, чаще на вечеринках, рейвах да в течение клубах. Особенно известен в течение мире тех, кто такой отыскивает «последние ощущения» или юркий кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения наркотик (марихуаны), сохраняющих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — молодые люди и еще молодые люди, как шест, в компании. Излиты в связи сравнительной доступности равно мифа о «безопасности».
Ямба
Яко это: Эфир, производимый изо смолы растения каннабис. Иметь в распоряжении фигуру тёмных, густых брусков. Попыхивается сквозь табак чи особенные устройства.
Кто такой употребляет: Те же, кто такой утилизирует марихуану — школьники, учащиеся, эпизодично сильнее взрослые потребители, расположенные для «релаксу» да изменению восприятия.
Трава
Что это: Высушенные листья равным образом цветы растения каннабис. Применяется путем курения, пореже — в течение еде. Инициирует расслабление, изменённое восприятие а также эйфорию.
Кто употребляет: Шибко широченный эклиптика — через подростков ут взрослых. В ТЕЧЕНИЕ некоторых краях легализована, яко влияет сверху восприятие ее как «неопасной», особенно язык молодёжи.
купить мефедрон says:
Кокаин
Яко это: Сильнодействующий стимулятор центральной сердитой системы.
Доставляет собою ярый порошок, почаще всего
вдыхается через нос. Быстро вызывает привыкание.
Кто такой применяет: Обычно — юные люди 20–40 полет, в этом количестве с безбедных пластов союзы, через слово —
чтобы «тусовок», подъема энергии, уверенности а также работоспособности.
Мефедрон
Что этто: Химический эфир, происхождение амфетамина.
Имеет стимулирующим и галлюциногенным
эффектом. Распространён
на варианте порошка чи таблеток.
Кто такой применяет: Молодые люди равным образом молодёжь, почаще на
пирушках, рейвах да в течение клубах.
Экстренно известен в среде
тех, кто такой отыскивает «новые чувства» или быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения каннабис (марихуаны), держащих
высокую фиксацию психоактивного
материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет:
Чаще всего — молодые и еще юные штаты, как шест, в течение компании.
Испущены ради условной доступности да мифа о «безвредности».
Гашиш
Яко этто: Наркотик, производимый из надоедалы растения
каннабис. Иметь в распоряжении фигуру тёмных, плотного сложения брусков.
Курится вследствие сигареты
или особенные устройства.
Кто употребляет: Эти ну, кто такой утилизирует марихуану — школьники, учащиеся вузов, эпизодично сильнее
совершеннолетные покупатели, склонные для
«релаксу» а также изменению восприятия.
Марихуана
Яко это: Высушенные хряпа а также цветы растения каннабис.
Употребляется путем курения, пореже — в течение еде.
Вызывает успокоение, изменённое цветовосприятие и еще эйфорию.
Кто употребляет: Очень широкий
эклиптика — через школьников ут взрослых.
В некоторых краях легализована, яко оказывает большое влияние на
цветовосприятие ее яко «безобидной», особенно язык
молодёжи.
Jorja Shah says:
Кокаин
Что это: Сильный электростимулятор основной сердитой системы. Рисует собой белый цинаш, почаще всего вдыхается посредством нос. Я мухой побуждает привыкание.
Кто употребляет: Элементарно — молодые штаты 20–40 лет, в этом количестве из снабженных слоёв окружения, через слово — чтобы «тусовок», подъема энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Химический эфир, дериват амфетамина. Имеет инициирующим равно психодислептическим эффектом. Распространён на варианте порошка чи таблеток.
Кто такой употребляет: Школьники и молодёжь, чаще сверху гулянках, рейвах и в течение клубах. Экстренно известен в течение слою тех, кто такой отыскивает «новоиспеченные чувства» или юркий кайф.
Бошки
Что это: Разговорное этноним элит соцветий растения каннабис (марихуаны), охватывающих высокую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — молодые люди да юные люди, как шест, в компании. Разблаговещены в связи сравнительной доступности равно домысла о «невредности».
Гашиш
Яко этто: Наркотик, штампуемый из надоедалы растения каннабис. Быть владельцем фигуру тёмных, густых брусков. Курится после табак чи специальные устройства.
Кто такой употребляет: Те ну, кто использует марихуану — школьники, учащиеся, иногда сильнее совершеннолетные потребители, склонные для «релаксу» да изменению восприятия.
Трава
Яко этто: Высушенные хряпа и еще цветы растения каннабис. Употребляется путём курения, реже — в течение еде. Вызывает успокоение, изменённое восприятие и эйфорию.
Кто такой употребляет: Очень широченный круг — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых краях легализована, яко оказывает большое влияние сверху цветовосприятие её как «неопасной», экстренно язык молодёжи.
Isidro Steffanoni says:
Снежок
Что это: Сильный электростимулятор стержневой нервическою системы. Исполнять роль собой ярый цинаш, чаще честь имею кланяться вдыхается через нос. Я мухой вызывает привыкание.
Кто такой применяет: Элементарно — юные штаты 20–40 полет, в течение том количестве из снабженных слоёв общества, через слово — чтобы «тусовок», подъема энергии, уверенности да работоспособности.
Мефедрон
Яко этто: Синтетический эфир, производное амфетамина. Владеет стимулирующим равным образом психодислептическим эффектом. Распространён в течение наружности порошка чи таблеток.
Кто такой употребляет: Молодые люди и молодёжь, почаще сверху пирушках, рейвах да в клубах. Особенно моден в среде этих, кто такой ищет «последние чувства» или быстрый кайф.
Бошки
Что это: Разговорное название элит соцветий растения каннабис (марихуаны), содержащих рослую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — дети да молодые штаты, как правило, в компании. Разблаговещены за условной доступности равно домысла что касается «безопасности».
Гашиш
Яко этто: Эфир, производимый изо смолы растения каннабис. Иметь в распоряжении форму тёмных, плотного сложения брусков. Курится после сигареты чи специальные устройства.
Кто применяет: Эти ну, кто такой использует марихуану — школьники, студенты, эпизодично сильнее совершеннолетные потребители, расположенные ко «релаксу» а также изменению восприятия.
Трава
Яко этто: Подсушенные хряпа равным образом цветы растения каннабис. Употребляется путём курения, реже — в течение еде. Побуждает успокоение, изменённое цветовосприятие а также эйфорию.
Кто такой употребляет: Шибко широченный эклиптика — через подростков ут взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, что действует на цветовосприятие ее как «загоришься», экстренно у молодёжи.
Berenice O'Flaherty says:
Кокаин
Яко этто: Сильный стимулятор основной сердитой системы. Рисует собой белый порошок, чаще честь имею кланяться вдыхается чрез нос. Я мухой провоцирует привыкание.
Кто употребляет: Элементарно — молодые люди 20–40 лет, в том количестве изо обеспеченных пластов общества, через слово — для «тусовок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, выводное амфетамина. Обладает инициирующим и психодислептическим эффектом. Распространён в варианте порошка чи таблеток.
Кто такой применяет: Дети а также молодежь, почаще сверху гулянках, рейвах да в клубах. Особенно востребован в слою тех, кто такой ищет «последние чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), охватывающих высокую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые да юные штаты, как правило, на компании. Разблаговещены из-за сравнительной доступности и мифа что касается «невредности».
Гашиш
Яко этто: Наркотик, производимый с смолы растения каннабис. Быть владельцем форму тёмных, коренастых брусков. Курится вследствие табак или специальные устройства.
Кто употребляет: Те ну, кто такой использует марихуану — школьники, студенты, эпизодично сильнее взрослые потребители, расположенные буква «релаксу» и еще изменению восприятия.
Трава
Яко это: Подсушенные хряпа и цветы растения каннабис. Применяется путем курения, реже — в еде. Поднимает расслабление, изменённое восприятие и эйфорию.
Кто такой употребляет: Шибко широченный эклиптика — от школьников до взрослых. НА отдельных сторонах легализована, что оказывает большое влияние на восприятие ее как «безобидной», особенно язык молодёжи.
Charlotte Camden says:
Снежок
Что это: Сильнодействующий электростимулятор центральной нервной системы. Представляет собой ярый порошок, почаще всего вдыхается посредством нос. Быстро провоцирует привыкание.
Кто применяет: Обычно — молодые штаты 20–40 лет, в течение этом количестве из обеспеченных миров общества, через слово — для «тусовок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Химический наркотик, происхождение амфетамина. Имеет ускоряющим и психодислептическим эффектом. Распространён в течение наружности порошка чи таблеток.
Кто такой применяет: Дети (а) также молодежь, почаще сверху гулянках, рейвах и еще в течение клубах. Экстренно известен на сфере тех, кто отыскивает «новые чувства» или быстрый кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения каннабис (марихуаны), сохраняющих рослую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — молодые и еще юные люди, как правило, в течение компании. Излиты ради условной доступности (а) также мифа о «невредности».
Ямба
Что этто: Наркотик, штампуемый изо смолы растения каннабис. Иметь в распоряжении форму тёмных, плотных брусков. Попыхивается сквозь табак или специализированные устройства.
Кто употребляет: Те же, кто утилизирует марихуану — подростки, учащиеся вузов, эпизодично более старшие потребители, склонные буква «релаксу» да изменению восприятия.
Трава
Яко это: Высушенные листья и цветы растения каннабис. Употребляется путем курения, пореже — в еде. Побуждает расслабление, изменённое восприятие а также эйфорию.
Кто такой употребляет: Шибко широкий круг — от школьников ут взрослых. В ТЕЧЕНИЕ некоторых странах легализована, яко действует на цветовосприятие ее как «неопасной», особенно язык молодёжи.
Virgilio Ogilvy says:
Снежок
Что этто: Сильный стимулятор стержневой нервической системы. Исполнять роль собой белый цинаш, почаще честь имею кланяться вдыхается через нос. Я мухой провоцирует привыкание.
Кто применяет: Элементарно — юные люди 20–40 лет, в течение этом количестве с снабженных миров слоя, часто — для «тусовок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Что этто: Синтетический наркотик, происхождение амфетамина. Владеет ускоряющим равным образом галлюциногенным эффектом. Распространён на виде порошка или таблеток.
Кто употребляет: Школьники (а) также молодежь, почаще на вечеринках, рейвах также в течение клубах. Экстренно известен в течение среде тех, кто отыскивает «последние ощущения» чи быстрый кайф.
Бошки
Что этто: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), сохраняющих рослую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — молодые люди да юные люди, как шест, на компании. Испущены ради относительной доступности равно мифа что касается «безопасности».
Гашиш
Яко это: Эфир, штампуемый изо надоедалы растения каннабис. Быть владельцем фигуру тёмных, плотного сложения брусков. Курится вследствие табак или специализированные устройства.
Кто такой употребляет: Эти же, кто такой использует марихуану — подростки, учащиеся, эпизодично сильнее совершеннолетние покупатели, расположенные к «релаксу» и изменению восприятия.
Марихуана
Яко этто: Высушенные листья и еще цветы растения каннабис. Употребляется путём курения, реже — на еде. Побуждает успокоение, изменённое восприятие и еще эйфорию.
Кто такой применяет: Шибко широкий круг — от подростков до взрослых. В ТЕЧЕНИЕ отдельных краях легализована, яко влияет сверху цветовосприятие её как «неопасной», экстренно у молодёжи.
Daniel Houston says:
Кокаин
Что этто: Сильнодействующий электростимулятор центральной нервной системы. Рисует собой ярый цинаш, почаще честь имею кланяться вдыхается чрез нос. Я мухой провоцирует привыкание.
Кто применяет: Обычно — молодые люди 20–40 лет, в течение этом части изо безбедных миров союзы, через слово — для «тусовок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Синтетический эфир, производное амфетамина. Иметь в своем распоряжении инициирующим равно галлюциногенным эффектом. Распространён в пейзаже порошка чи таблеток.
Кто применяет: Молодые люди (а) также молодежь, чаще на пирушках, рейвах и еще на клубах. Особенно востребован в течение слою этих, кто такой отыскивает «новые ощущения» или юркий кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), содержащих рослую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — молодые люди и еще молодые люди, яко шест, на компании. Разблаговещены из-за сравнительной доступности (а) также домысла о «безвредности».
Ямба
Что этто: Наркотик, производимый изо надоедалы растения каннабис. Быть владельцем фигуру тёмных, коренастых брусков. Курится вследствие сигареты чи особенные устройства.
Кто такой применяет: Те же, кто такой утилизирует марихуану — подростки, учащиеся, эпизодично более старшие потребители, расположенные ко «релаксу» да изменению восприятия.
Марихуана
Яко этто: Высушенные листья и еще цветочки растения каннабис. Применяется путем курения, пореже — в еде. Побуждает расслабление, изменённое цветовосприятие и эйфорию.
Кто такой применяет: Очень широченный круг — через школьников до взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, яко воздействует на цветовосприятие её яко «безопасной», экстренно язык молодёжи.
Darrel Noble says:
Кокаин
Яко этто: Сильнодействующий стимулятор стержневой нервическою системы. Представляет собой ярый порошок, почаще всего вдыхается чрез нос. Быстро провоцирует привыкание.
Кто применяет: Обычно — молодые штаты 20–40 лет, в течение том числе из снабженных слоёв союзы, через слово — чтобы «вечеринок», подъема энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Синтетический наркотик, происхождение амфетамина. Владеет стимулирующим равным образом психодислептическим эффектом. Распространён в течение варианте порошка чи таблеток.
Кто такой применяет: Молодые люди равным образом молодёжь, чаще на тусовках, рейвах и еще в клубах. Особенно востребован на сфере этих, кто такой отыскивает «новоиспеченные чувства» или юркий кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), сохраняющих рослую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — молодые также юные штаты, яко шест, в течение компании. Распространены ради относительной доступности равно мифа что касается «безвредности».
Гашиш
Яко это: Эфир, штампуемый с смолы растения каннабис. Быть владельцем форму тёмных, густых брусков. Курится через сигареты чи особенные устройства.
Кто употребляет: Эти же, кто такой использует марихуану — подростки, студенты, иногда сильнее совершеннолетные потребители, расположенные к «релаксу» и изменению восприятия.
Трава
Яко этто: Подсушенные хряпа и цветы растения каннабис. Применяется путём курения, пореже — в еде. Поднимает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто употребляет: Очень широченный эклиптика — от подростков до взрослых. В ТЕЧЕНИЕ некоторых краях легализована, что оказывает большое влияние на восприятие её яко «неопасной», особенно язык молодёжи.
https://articleterrain.com/page-36/ says:
한 무장 산적라스베가스의 심장{이/제공}다음{장점/장점/우수성}: https://articleterrain.com/page-36/ 기계. 어떤 이유로{당신은}시도뭔가이매운{도박/슬롯 머신}모 칠리?
https://www.simet.com.co/2025/05/28/page-39/ says:
Also visit my page :: https://www.simet.com.co/2025/05/28/page-39/
https://4rabet-apps.com/4-2/ says:
Take a look at my web blog; https://4rabet-apps.com/4-2/
http://molbiol.ru/forums/index.php?showtopic=2092267 says:
Крутить автоматы без продукта, легко и на протяжении интернет http://molbiol.ru/forums/index.php?showtopic=2092267.
https://fastnewsposts.com/60-z-bez-depozytu-za-rejestracj-odkryj-najlepsze/ says:
jednak sama/ właściwa wartość bonusów jest tylko jeden z kilku aspektów, https://fastnewsposts.com/60-z-bez-depozytu-za-rejestracj-odkryj-najlepsze/ na podstawie tego, wymagane ocenić atrakcyjność oferty reklamowej.
https://p0c.844.myftpupload.com/page-195/ says:
사이트 안정성,보너스 혜택,게임 옵션,{고객/고객/소비자 서비스 센터},안전한{결제/결제}방법,모바일 호환성, https://p0c.844.myftpupload.com/page-195/,쉬운 구독 등 고려되었습니다.
https://theinningsinsight.co.uk/2025/05/28/page-28/ says:
이 웹 사이트는 귀하가 웹 사이트를 탐색하는 동안 귀하의 경험을 향상시키기 위해 쿠키를 사용합니다.
Feel free to surf to my webpage https://theinningsinsight.co.uk/2025/05/28/page-28/
https://pinshape.com/users/7716663-dietter says:
at that moment how they publish exclusive offers and advertising campaigns, attracting clients on loyal
website, https://pinshape.com/users/7716663-dietter, they also
pay time to interaction.
https://www.rmtradecenter.com.br/page-106/ says:
합법적인{가상/온라인/인터넷}도박장은창조플레이어의 공정한{태도/전망}을 위해 규제됩니다. https://www.rmtradecenter.com.br/page-106/:{당신/당신}해야 합니다라이센스가 있습니다.
pop art works says:
“In the 1970s, I bought a huge collection of antique lamps that I traded in, and for restoring this antique, https://www.voka.at/work, I needed to find suitable craftsmen,” – he explains.
https://merinoymurgui.com/?p=250143 says:
заполнение заявки отнимет совершенно немного времени, и благодаря полной автоматизации процесса оценки платежеспособности заемщиков,.
Feel free to surf to my site https://merinoymurgui.com/?p=250143
https://www.wowreadme.com/?p=45000 says:
추가/추가/다른 것들 중, https://www.wowreadme.com/?p=45000 {일부/부품}도박장호스트 게임 쇼제공더 흥미로운{게임 플레이/게임}.
https://costablancaportfolio.com/?p=9069 says:
200 무료 평가판 회전가져 오기워 존의 아이디어,재생 https://costablancaportfolio.com/?p=9069 그리고{가져 오기/검색/찾기}왜/만약}이것이{정말로/실제로}입니다.
Mavis Dooley says:
My partner and I stumbled over here by a different website and thought I might as well check things out. I like what I see so now i am following you. Look forward to looking at your web page yet again.
https://domfenshuy.net/all-about-repairing/monitoring-cen-v-internete-dlya-e-commerce.html says:
портал для анализа цен и https://domfenshuy.net/all-about-repairing/monitoring-cen-v-internete-dlya-e-commerce.html управления ассортиментом.
Samuel Alberts says:
Hello! I simply wish to offer you a huge thumbs up for your excellent info you have here on this post. I am returning to your site for more soon.
http://www.codigix.com/taxi-nicosia-your-ultimate-transportation-guide/ says:
!–
My web-site; http://www.codigix.com/taxi-nicosia-your-ultimate-transportation-guide/
https://kalyanironsteel.in/?p=4973 says:
Wengrow, D., “The Prehistoric Times of Product Branding,” Modern Anthropology, https://kalyanironsteel.in/?p=4973 vol. Gregg, E. and Trillo, R., “A Short Guide to the Gambia,” rough guides, 2004, p.
https://greenhousebistro.sg/2025/06/10/the-innovative-world-of-astrogrow-transforming/ says:
a single cookie will be stored in your browser, be able to remember your preferences and never be expected to be tracked by https://greenhousebistro.sg/2025/06/10/the-innovative-world-of-astrogrow-transforming/.
https akarius ru sorter kub says:
вас время.
Have a look at my web blog: https://www.pcweek.ua/forum/view_profile.php?UID=76077
https://jollibee-casino1.com/ says:
The platform automatically adapts to screens of different sizes, and this provides a chance https://jollibee-casino1.com/ provides a smooth party on smartphones and tablets without damage to quality or features.
Martina Mott says:
Ahaa, its fastidious dialogue about this article at this place at this web site, I have read all that, so at this time me also commenting here.
Elvis Peltier says:
The other day, while I was at work, my cousin stole my iPad and tested to see if it can survive a 25 foot drop, just so she can be a youtube sensation. My iPad is now destroyed and she has 83 views. I know this is totally off topic but I had to share it with someone! dark market onion https://mydarknetmarketsurl.com
Lashunda Swart says:
I used to be able to find good advice from your articles.
Kathrin Kawamoto says:
Quality articles or reviews is the important to interest the viewers to go to see the site, that’s what this web site is providing.
curve fi says:
if you are at a paid class, and want reorient to the free version or completely cancel your account, you need study the regulations and the conditions for the cancellation of curve finance, since are any manipulations or notification periods that.
my site: https://crva.us/
https://allmannabostad.se/strahovanie-dlja-alpinizma-i-skalolazanija/ says:
сейчас страхование жизни обеспечивает самое драгоценное, что вы получаете: здоровье, жизнь, уверенное будущее, способность.
Check out my web site :: https://allmannabostad.se/strahovanie-dlja-alpinizma-i-skalolazanija/
debridge finance exchange says:
any of us you will have to select a chain for creating your referral link. Choose which wallet you dream to connect https://debridge-finance.org/ to, for example, to the solflare wallet, it is available in the form a web wallet.
кракен обзор says:
Может, https://kra33atcc.cc/ кто-то клиенту имел дело с подобным? Может, при этом кто-то в курсе, как нужно поступать в такого рода обстоятельствах?
xxx videos porn sites says:
You actually expressed this fantastically!
https://39504.org/showthread.php?tid=99342 says:
такая модель позволяет казино выплачивать деньги лишь за результат, https://39504.org/showthread.php?tid=99342 а не показы или клики!
keplr wallet staking says:
keplr evolves daily, the keplr https://kplrv.us/ adapts to satisfaction of users and industry trends. KEPLR is compatible with with IBC networks, allowing users to transfer assets over these networks as Osmosis, Juno and Secret network.
orbiter bridge says:
The withheld fee is the fee for gas, which is pre-paid to the creator for the return of assets in the target network. Developers can configure the environment, token type, https://orbiter-finance.app/, and amount.
debridge finance exchange says:
purpose of testing, we have implemented a small program that is able perform two actions: sum two numbers (transmitted as u64 numbers) OR print out provided data for registration (transmitted as ascii-encryption and how the second account in the.
Have a look at my website https://debridge-finance.us/
stargate finance says:
XPLA joins the growing list of interchangeable omnichain (OFT) tokens available on Stargate, expanding personal announcement due to the compatibility of omnichain, https://stargate-finance.org/, developed by Layerzero labs.
orbiter finance swap says:
Initially expected earlier, in December 2024, the postponement of tge from https://orbiter-finance.io/ raised concerns about the planning and readiness of the platform.
orbiter bridge says:
Follow the instructions on the screen or contact support to effectively solve problems. Flexibility: Thanks to the support of multiple accumulative payment chains, https://orbiter-finance.info/ offers rich selection of transfer options.
https://nanoherbalmedicine.com/2025/06/12/wazamba-casino-ekscytujcy-wiat-gier-online/ says:
wir haben für euch die registrierung geprüft, um euch eine einfache anmeldung https://nanoherbalmedicine.com/2025/06/12/wazamba-casino-ekscytujcy-wiat-gier-online/ zu gewährleisten.
Frances Woodley says:
The Private Instagram Viewer is a understandable tool intended to let you anonymously question public Instagram profiles without logging into your own account. Whether you’re impatient nearly a username, desire to look someones profile describe in full size, or check out their bio and public posts, this tool makes it quick and private.
repwatchpro.cx says:
in improved layout copies used reliable self-winding mechanisms or Japanese quartz watches, https://www.repwatchpro.cx/ which as a rule, enough detailed work with daily use.
https://bestbetss.com/betting-inside-linebet/ says:
Being main of the main players in the https://bestbetss.com/betting-inside-linebet/ 1xbet recognized as a reliable brand licensed by the Office of Money Games Curacao.
http://redbar.jp/discover-wazamba-your-ultimate-online-casino/ says:
then to start this venture, it is necessary to soberly assess existing budget, experience, http://redbar.jp/discover-wazamba-your-ultimate-online-casino/ and portals.
parimatch india app download says:
Our section of instant games is excellent suitable for visitors who want to https://parimatch-download.app/ quickly. enter your contact phone plus password.
Dalene Huddleston says:
Fine way of telling, and good piece of writing to take facts regarding my presentation topic, which i am going to deliver in academy.
http://chanelmademoiselle.ru/ says:
в то время как tissot больше cориентирован на съёмку истинных швейцарских часов, а certina являет собой исключительно атлетические версии с.
my web page http://chanelmademoiselle.ru/
mystic fonts says:
The 1980s with the introduction of Unicode. only Unicode has much more than 128 characters used when https://typetype.org/fonts/mystic/, and so it turns out, and this extremely many of them slightly resemble the usual Latin alphabet (that is turn into English text).
https://tradesentio.com says:
In the stock market, with its complex network of numbers, trends, and forecasts, the https://tradesentio.com// happens is both interesting and stunning.
https://php-ru.info/forum/advokat-t28417.html says:
Словник основних кримінально-процесуальних понять і https://php-ru.info/forum/advokat-t28417.html термінів|/ а.
http://www.setka.co/cz-kasina/explore-the-exciting-world-of-bonus-crab-casino/ says:
now We have focused on finding the best http://www.setka.co/cz-kasina/explore-the-exciting-world-of-bonus-crab-casino/ for gaming.
http://www.limpopokids.ru says:
2. донести до кипения, уменьшить огонь и готовить 15 минут, http://www.limpopokids.ru// периодически помешивая.
https://xdnetwork.co.in/passhub-for-business-streamlining-your-companys/ says:
we publish a 30-day money back guarantee. The URL of your passhub will be located in your wwpass account in passhub https://xdnetwork.co.in/passhub-for-business-streamlining-your-companys/ days.
http://women-top.ru/ says:
В редколлегию журнала входят 77 лучших российских и зарубежных ученых – 2 академика РАН, 5 академиков и два члена-корреспондента.
Also visit my web-site :: http://women-top.ru/
http://5stars-nsk.ru/ says:
Путешествуя посредством автобусном транспорте, вы будете способны наблюдать за пейзажами, городами и небольшими поселениями,.
Take a look at my web blog :: http://5stars-nsk.ru/
https://krasaclub.com says:
Всем привет! Это мой первый пост на Косметисте и развить своё странствие по сайту я решила с моего хобби https://krasaclub.com// – макияжа.
https://ferdinand.com.ua/forum/topics/ajpad-kupit-bu.21050/ says:
а любые игры просто https://ferdinand.com.ua/forum/topics/ajpad-kupit-bu.21050/ летают. Чипсет получил 4-ядерную систему gpu и 16-ядерную neural engine.
arteroll.ru says:
в течение первых пары недель после начала приема препарата наблюдается обострение состояния сосудов, так как из труб выводятся шлаки.
Also visit my website … https://arteroll.ru/
Lucky Jet says:
at your disposal will be two large buttons: https://www.paislobo.cl/2023/10/lucky-jet-resena-del-juego.html – place a bet and withdraw amount. you can to play in 1win lucky jet from controlled mobile using the 1win app either mobile version of site of this casino.
https://www.nagpurtoday.in/where-to-play-aviator-in-bangladesh-and-india/11041228 says:
Multi-user mode: chat on a resource with others gambling people increases engagement and spreads a social element to https://www.nagpurtoday.in/where-to-play-aviator-in-bangladesh-and-india/11041228.
http://novosibirsk-magazin-kaljanov.ru/ says:
мы сотрудничаем с ведущими фирмами-производителями и поставляем для вас идеальный продукт http://novosibirsk-magazin-kaljanov.ru/ по наилучшим ценам.
Visor de Instagram privado says:
El Visor privado de Instagram es una herramienta amigable destinada para permitirle
anónimamente evaluar perfiles públicos de Instagram sin iniciar sesión en su propia cuenta.
Ya sea que estés curioso más o menos un nombre de usuario, quieres mirar el perfil de
alguien caracterizar en tamaño completo, o ver su biografía y publicaciones públicas, esta herramienta lo hace rápido y privado.
Bernardo Kimpton says:
El Visor privado de Instagram es una herramienta manejable pensada para permitirle anónimamente examinar perfiles públicos de Instagram sin iniciar sesión en su propia cuenta. Ya sea que estés curioso virtualmente un nombre de usuario, deseas ver el perfil de alguien caracterizar en tamaño completo, o ver su biografía y publicaciones públicas, esta herramienta lo hace rápido y privado.
https://razgovory.forumotion.com/t983-topic says:
Адвокат може захищати вас в суді і взяти на себе всі турботи супроводу справи, https://razgovory.forumotion.com/t983-topic в часності і коли вас немає.
https://landing.nhovn.com/skachat-igry-kvesty-cherez-torrent-0/ says:
она окажется заметно выделяться среди прочих элементов https://landing.nhovn.com/skachat-igry-kvesty-cherez-torrent-0/ страницы. 5. Дождитесь окончания старта гейма.
https://houseofbamboo.com.pk/skachat-logicheskie-igry-cherez-torrent/ says:
Напоследок дадим совет, который функционирует всегда и с необходимыми играми.
Here is my webpage: https://houseofbamboo.com.pk/skachat-logicheskie-igry-cherez-torrent/
https://myglobestories.ch/the-importance-of-car-key-duplication/ says:
provides most modern offers for repair and maintenance of mitsubishi https://myglobestories.ch/the-importance-of-car-key-duplication/ vehicles.
Adelaide Pemberton says:
El Visor privado de Instagram es una herramienta accesible destinada para permitirle anónimamente evaluar perfiles públicos de Instagram sin iniciar sesión en su propia cuenta. Ya sea que estés ávido no del todo un nombre de usuario, quieres ver el perfil de alguien retratar en tamaño completo, o ver su biografía y publicaciones públicas, esta herramienta lo hace rápido y privado.
http://www.himo.co.kr/himo_event/job_event_20160215/index.html?page=715 says:
I recently purchased my house, and everything that is depicted on photographs is new. I wanted the window decoration to be smooth and look based on the http://www.himo.co.kr/himo_event/job_event_20160215/index.html?page=715.
https://cl109619.tmweb.ru/surgutki86/surgut-sajt-transy-luchshie-resursy-i-soobshhestva/ says:
Ищите https://cl109619.tmweb.ru/surgutki86/surgut-sajt-transy-luchshie-resursy-i-soobshhestva/ секс за деньги? цена выкладки публикаций на сайте всего 1000 рублей за месяц.
https://facenicobaggio.it/skachat-prikljuchencheskie-igry-cherez-torrent/ says:
Пусть в сети еще больше блоков, что позволяют забрать игровой софт бесплатно торрентом, однако здесь царит порядок.
my web-site … https://facenicobaggio.it/skachat-prikljuchencheskie-igry-cherez-torrent/
Genia Forshee says:
El Visor privado de Instagram es una herramienta genial destinada para permitirle anónimamente diseccionar perfiles públicos de Instagram sin iniciar sesión en su propia cuenta. Ya sea que estés curioso aproximadamente un nombre de usuario, deseas ver el perfil de alguien describir en tamaño completo, o ver su biografía y publicaciones públicas, esta herramienta lo hace rápido y privado.
Joseph Heron says:
Hey! I just wanted to ask if you ever have any problems with hackers? My last blog (wordpress) was hacked and I ended up losing several weeks of hard work due to no data backup. Do you have any solutions to prevent hackers?
купить бошки says:
Снежок
Что этто: Сильнодействующий стимулятор основной сердитой
системы. Доставляет собой ярый порошок, почаще
честь имею кланяться вдыхается после нос.
Я мухой побуждает привыкание.
Кто такой применяет: Элементарно
— молодые люди 20–40 лет, в течение этом числе из обеспеченных
пластов союзы, через слово — чтобы «тусовок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, выводное амфетамина.
Имеет инициирующим и психодислептическим эффектом.
Распространён на пейзаже
порошка или таблеток.
Кто такой применяет: Подростки а также молодёжь,
почаще на тусовках, рейвах да на клубах.
Экстренно моден на слою этих,
кто такой отыскивает «новоиспеченные чувства» чи
быстрый кайф.
Бошки
Яко это: Разговорное этноним элит соцветий растения
каннабис (марихуаны), сохраняющих
рослую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь
имею кланяться — дети
да юные люди, как шест, в течение компании.
Разблаговещены ради сравнительной доступности равно мифа
что касается «безвредности».
Ямба
Что этто: Наркотик, штампуемый изо надоедалы
растения каннабис. Имеет форму тёмных, коренастых
брусков. Попыхивается сквозь табак чи
специальные устройства.
Кто такой применяет: Те же, кто использует марихуану — школьники, студенты, эпизодично
более старшие потребители, склонные буква «релаксу» а также изменению восприятия.
Марихуана
Что этто: Высушенные листья и цветочки растения каннабис.
Применяется путем курения, реже — на еде.
Поднимает успокоение, изменённое восприятие и еще эйфорию.
Кто такой употребляет: Шибко широченный круг — через подростков ут
взрослых. НА некоторых государствах легализована, яко воздействует сверху восприятие её как «безопасной», экстренно у молодёжи.
Chara Hornsby says:
Снежок
Что это: Сильнодействующий стимулятор центральной нервической системы. Представляет собой белый порошок, почаще честь имею кланяться вдыхается посредством нос. Быстро побуждает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 лет, в этом количестве с снабженных слоёв слоя, часто — чтобы «тусовок», подъема энергии, уверенности и еще работоспособности.
Мефедрон
Яко это: Химический эфир, дериват амфетамина. Иметь в своем распоряжении возбуждающим равным образом галлюциногенным эффектом. Распространён на варианте порошка чи таблеток.
Кто употребляет: Дети а также молодёжь, почаще сверху тусовках, рейвах и еще в течение клубах. Экстренно известен в течение мире этих, кто такой отыскивает «новоиспеченные чувства» или юркий кайф.
Бошки
Яко это: Разговорное название элит соцветий растения наркотик (марихуаны), сохраняющих высокую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — молодые люди и молодые штаты, как правило, в течение компании. Испущены из-за относительной доступности (а) также мифа о «безопасности».
Ямба
Что этто: Наркотик, штампуемый с смолы растения каннабис. Обладает фигуру тёмных, густых брусков. Курится вследствие табак или специализированные устройства.
Кто употребляет: Эти же, кто утилизирует марихуану — школьники, учащиеся вузов, иногда сильнее совершеннолетние покупатели, склонные для «релаксу» и изменению восприятия.
Трава
Что это: Высушенные листья и цветы растения каннабис. Применяется путём курения, реже — на еде. Инициирует расслабление, изменённое восприятие и эйфорию.
Кто такой применяет: Шибко широкий эклиптика — от подростков до взрослых. В отдельных сторонах легализована, что оказывает большое влияние сверху цветовосприятие ее яко «безобидной», экстренно язык молодёжи.
Letha Crooks says:
Снежок
Яко это: Сильный электростимулятор стержневой нервной системы. Представляет собою белый порошок, почаще честь имею кланяться вдыхается после нос. Быстро возбуждает привыкание.
Кто употребляет: Обычно — юные штаты 20–40 лет, в течение том количестве из гарантированных слоёв общества, часто — для «тусовок», повышения энергии, убежденности и работоспособности.
Мефедрон
Что этто: Синтетический эфир, производное амфетамина. Обладает инициирующим да психодислептическим эффектом. Распространён на виде порошка чи таблеток.
Кто такой применяет: Подростки а также молодежь, чаще сверху тусовках, рейвах да на клубах. Экстренно популярен на сфере тех, кто ищет «новоиспеченные ощущения» чи юркий кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), сохраняющих рослую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — молодые люди также юные штаты, яко правило, в течение компании. Излиты в связи условной доступности и домысла что касается «безопасности».
Ямба
Что этто: Эфир, производимый из надоедалы растения каннабис. Имеет фигуру тёмных, густых брусков. Попыхивается через сигареты чи специализированные устройства.
Кто такой применяет: Те ну, кто такой утилизирует марихуану — школьники, учащиеся вузов, иногда более старшие потребители, расположенные ко «релаксу» да изменению восприятия.
Марихуана
Яко это: Подсушенные листья и цветы растения каннабис. Употребляется путём курения, пореже — в течение еде. Вызывает успокоение, изменённое восприятие а также эйфорию.
Кто такой применяет: Шибко широченный круг — через подростков до взрослых. НА отдельных странах легализована, что влияет на восприятие ее яко «загоришься», особенно язык молодёжи.
Alice Esquivel says:
Снежок
Что этто: Забористый электростимулятор стержневой сердитой системы. Представляет собою ярый порошок, чаще честь имею кланяться вдыхается посредством нос. Я мухой возбуждает привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 полет, в этом количестве с обеспеченных миров окружения, через слово — чтобы «тусовок», подъема энергии, уверенности и еще работоспособности.
Мефедрон
Что это: Синтетический эфир, дериват амфетамина. Владеет стимулирующим равным образом психодислептическим эффектом. Распространён в наружности порошка чи таблеток.
Кто употребляет: Школьники равным образом молодёжь, почаще сверху пирушках, рейвах и на клубах. Экстренно известен в течение слою тех, кто такой ищет «новоиспеченные ощущения» или быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения каннабис (марихуаны), охватывающих высокую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — подростки также юные люди, яко правило, в течение компании. Распространены из-за относительной доступности да мифа о «безвредности».
Ямба
Яко этто: Наркотик, производимый из смолы растения каннабис. Иметь в распоряжении форму тёмных, коренастых брусков. Попыхивается через сигареты или спец. устройства.
Кто такой употребляет: Эти ну, кто использует марихуану — школьники, учащиеся, иногда более совершеннолетние покупатели, расположенные к «релаксу» а также изменению восприятия.
Трава
Яко этто: Подсушенные листья равным образом цветы растения каннабис. Применяется путём курения, реже — в течение еде. Вызывает расслабление, изменённое восприятие равно эйфорию.
Кто такой применяет: Очень широченный эклиптика — через подростков ут взрослых. В отдельных государствах легализована, что оказывает большое влияние на восприятие ее яко «загоришься», особенно язык молодёжи.
Isabel Raley says:
Кокаин
Что этто: Сильнодействующий стимулятор основной нервической системы. Рисует собой ярый цинаш, чаще всего вдыхается после нос. Быстро провоцирует привыкание.
Кто применяет: Обычно — юные штаты 20–40 лет, в течение этом количестве с обеспеченных пластов окружения, часто — чтобы «тусовок», увеличения энергии, уверенности и еще работоспособности.
Мефедрон
Яко этто: Синтетический эфир, выводное амфетамина. Владеет инициирующим и психодислептическим эффектом. Распространён в пейзаже порошка или таблеток.
Кто применяет: Молодые люди а также молодежь, чаще сверху пирушках, рейвах да на клубах. Особенно моден в среде тех, кто такой отыскивает «новые чувства» чи юркий кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), сохраняющих рослую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — дети да юные люди, как шест, в компании. Распространены за условной доступности (а) также домысла что касается «безопасности».
Гашиш
Яко это: Эфир, производимый из надоедалы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Курится вследствие табак чи спец. устройства.
Кто применяет: Эти ну, кто такой использует марихуану — подростки, учащиеся, иногда более совершеннолетние потребители, расположенные буква «релаксу» и еще изменению восприятия.
Трава
Яко это: Подсушенные листья равным образом цветы растения каннабис. Применяется путём курения, реже — в еде. Побуждает расслабление, изменённое цветовосприятие равно эйфорию.
Кто такой применяет: Шибко широкий эклиптика — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, яко действует на цветовосприятие её как «неопасной», экстренно у молодёжи.
Hilda Lomas says:
Кокаин
Яко это: Сильнодействующий электростимулятор основной нервной системы. Рисует собою белый цинаш, чаще всего вдыхается через нос. Я мухой вызывает привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 лет, на этом количестве изо обеспеченных слоёв общества, через слово — для «тусовок», подъема энергии, убежденности и еще работоспособности.
Мефедрон
Что это: Химический эфир, выводное амфетамина. Иметь в своем распоряжении инициирующим да психодислептическим эффектом. Распространён в течение виде порошка или таблеток.
Кто применяет: Молодые люди и молодежь, чаще на пирушках, рейвах и в клубах. Особенно популярен в мире этих, кто такой отыскивает «новые ощущения» или юркий кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), держащих высокую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — молодые и еще молодые штаты, яко шест, в компании. Распространены за условной доступности и домысла что касается «безвредности».
Ямба
Яко этто: Наркотик, производимый с смолы растения каннабис. Обладает фигуру тёмных, плотных брусков. Курится после табак чи специализированные устройства.
Кто употребляет: Эти ну, кто такой утилизирует марихуану — подростки, учащиеся вузов, иногда сильнее совершеннолетние покупатели, склонные буква «релаксу» и изменению восприятия.
Трава
Яко это: Высушенные хряпа и цветочки растения каннабис. Употребляется путём курения, реже — на еде. Побуждает успокоение, изменённое восприятие и эйфорию.
Кто применяет: Шибко широкий круг — от школьников до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, яко влияет сверху восприятие ее как «безобидной», особенно у молодёжи.
Layla Lenihan says:
Кокаин
Что это: Сильнодействующий стимулятор центральной нервическою системы. Представляет собою ярый порошок, почаще всего вдыхается чрез нос. Я мухой возбуждает привыкание.
Кто применяет: Элементарно — юные люди 20–40 полет, в течение том числе с обеспеченных пластов окружения, часто — чтобы «тусовок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Яко это: Химический наркотик, происхождение амфетамина. Владеет инициирующим и галлюциногенным эффектом. Распространён в течение варианте порошка или таблеток.
Кто такой применяет: Школьники а также молодежь, почаще сверху гулянках, рейвах и на клубах. Особенно популярен на слою тех, кто ищет «новые ощущения» или юркий кайф.
Бошки
Яко это: Разговорное название элит соцветий растения каннабис (марихуаны), охватывающих высокую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — молодые и еще молодые штаты, как правило, в течение компании. Разблаговещены за относительной доступности равно мифа что касается «невредности».
Ямба
Яко это: Наркотик, производимый изо надоедалы растения каннабис. Обладает форму тёмных, плотных брусков. Попыхивается вследствие сигареты чи специальные устройства.
Кто такой употребляет: Эти же, кто такой утилизирует марихуану — школьники, учащиеся, эпизодично более взрослые потребители, расположенные буква «релаксу» а также изменению восприятия.
Марихуана
Что это: Высушенные листья а также цветы растения каннабис. Применяется путём курения, реже — на еде. Побуждает успокоение, изменённое восприятие равно эйфорию.
Кто такой употребляет: Шибко широченный эклиптика — через школьников до взрослых. НА некоторых краях легализована, что действует сверху восприятие ее яко «безопасной», особенно у молодёжи.
купить бошки says:
Снежок
Яко этто: Сильный электростимулятор
центральной сердитой системы.
Рисует собой ярый порошок, почаще честь
имею кланяться вдыхается посредством нос.
Быстро возбуждает привыкание.
Кто такой употребляет: Элементарно
— юные штаты 20–40 лет, на этом части с обеспеченных
слоёв окружения, часто — чтобы
«тусовок», подъема энергии, уверенности да
работоспособности.
Мефедрон
Что этто: Синтетический эфир, производное амфетамина.
Обладает инициирующим равным образом психодислептическим
эффектом. Распространён в течение варианте
порошка или таблеток.
Кто такой употребляет:
Школьники и молодёжь,
почаще сверху тусовках, рейвах и еще
в течение клубах. Экстренно востребован в течение слою тех,
кто ищет «новые чувства» чи юркий кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения каннабис (марихуаны),
содержащих высокую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — молодые и молодые штаты, яко правило,
в течение компании. Распространены за относительной доступности равно домысла что касается «невредности».
Ямба
Что этто: Эфир, производимый из смолы растения каннабис.
Обладает форму тёмных, коренастых брусков.
Попыхивается сквозь сигареты чи специальные
устройства.
Кто применяет: Эти ну, кто такой
использует марихуану — школьники, учащиеся, иногда сильнее совершеннолетние потребители, склонные к «релаксу» да
изменению восприятия.
Марихуана
Что этто: Подсушенные листья равным образом цветочки растения каннабис.
Употребляется путем курения, пореже — в течение еде.
Побуждает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто применяет: Очень широкий круг — через школьников ут взрослых.
В ТЕЧЕНИЕ отдельных краях легализована, что
оказывает большое влияние сверху цветовосприятие её как «безопасной», особенно язык молодёжи.
Darren Mactier says:
Снежок
Яко этто: Сильный стимулятор основной нервическою системы. Исполнять роль собой ярый цинаш, чаще всего вдыхается после нос. Я мухой возбуждает привыкание.
Кто такой применяет: Обычно — юные люди 20–40 полет, в течение этом числе с снабженных миров общества, часто — чтобы «вечеринок», подъема энергии, уверенности а также работоспособности.
Мефедрон
Яко это: Синтетический наркотик, происхождение амфетамина. Имеет инициирующим равным образом психодислептическим эффектом. Распространён на варианте порошка или таблеток.
Кто такой применяет: Подростки и молодежь, чаще на гулянках, рейвах и еще в течение клубах. Экстренно моден в течение сфере этих, кто ищет «новые чувства» или юркий кайф.
Бошки
Что это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), содержащих высокую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — молодые и молодые люди, яко шест, в течение компании. Разблаговещены за относительной доступности да домысла что касается «невредности».
Ямба
Что это: Наркотик, штампуемый из смолы растения каннабис. Обладает фигуру тёмных, плотных брусков. Попыхивается через табак чи особенные устройства.
Кто применяет: Те ну, кто такой утилизирует марихуану — школьники, учащиеся вузов, эпизодично сильнее взрослые потребители, склонные для «релаксу» и еще изменению восприятия.
Марихуана
Яко это: Подсушенные листья и цветы растения каннабис. Употребляется путём курения, реже — в течение еде. Вызывает успокоение, изменённое цветовосприятие и эйфорию.
Кто применяет: Шибко широченный круг — через школьников ут взрослых. НА некоторых государствах легализована, что влияет на цветовосприятие ее яко «безопасной», экстренно у молодёжи.
Cliff Boisvert says:
Снежок
Что этто: Забористый электростимулятор стержневой нервической системы. Рисует собою белый порошок, почаще всего вдыхается посредством нос. Быстро провоцирует привыкание.
Кто такой применяет: Обычно — молодые штаты 20–40 лет, на том части из снабженных миров союзы, часто — для «вечеринок», повышения энергии, уверенности и еще работоспособности.
Мефедрон
Яко это: Химический наркотик, выводное амфетамина. Обладает ускоряющим равным образом галлюциногенным эффектом. Распространён в течение виде порошка или таблеток.
Кто применяет: Подростки равным образом молодежь, почаще на пирушках, рейвах да в течение клубах. Экстренно известен в течение слою тех, кто отыскивает «последние ощущения» или быстрый кайф.
Бошки
Что этто: Разговорное название элит соцветий растения каннабис (марихуаны), содержащих рослую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — дети да юные штаты, как шест, на компании. Испущены ради сравнительной доступности равно домысла что касается «безвредности».
Гашиш
Что это: Эфир, производимый с смолы растения каннабис. Обладает форму тёмных, плотных брусков. Курится через сигареты чи особенные устройства.
Кто применяет: Эти ну, кто такой утилизирует марихуану — подростки, учащиеся, иногда сильнее совершеннолетные потребители, склонные буква «релаксу» а также изменению восприятия.
Трава
Что это: Высушенные хряпа равным образом цветы растения каннабис. Применяется путем курения, реже — в еде. Вызывает расслабление, изменённое восприятие и эйфорию.
Кто такой употребляет: Очень широкий эклиптика — через подростков до взрослых. В отдельных государствах легализована, яко оказывает большое влияние на цветовосприятие её как «загоришься», особенно язык молодёжи.
Leif Roper says:
Кокаин
Яко это: Сильнодействующий стимулятор основной нервной системы. Представляет собой ярый цинаш, почаще честь имею кланяться вдыхается после нос. Быстро возбуждает привыкание.
Кто употребляет: Элементарно — молодые люди 20–40 лет, в течение том количестве из обеспеченных миров окружения, через слово — чтобы «тусовок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Яко этто: Химический наркотик, выводное амфетамина. Владеет ускоряющим да галлюциногенным эффектом. Распространён в течение наружности порошка или таблеток.
Кто такой употребляет: Дети и молодёжь, почаще на тусовках, рейвах и в клубах. Особенно популярен в течение сфере тех, кто такой ищет «последние ощущения» чи юркий кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), содержащих рослую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — молодые люди и еще юные штаты, яко правило, в течение компании. Излиты в связи относительной доступности (а) также мифа что касается «невредности».
Ямба
Что этто: Эфир, штампуемый из надоедалы растения каннабис. Иметь в распоряжении форму тёмных, коренастых брусков. Курится сквозь сигареты чи специализированные устройства.
Кто употребляет: Те же, кто использует марихуану — школьники, студенты, иногда более старшие покупатели, расположенные для «релаксу» да изменению восприятия.
Трава
Что этто: Подсушенные листья а также цветочки растения каннабис. Употребляется путём курения, реже — на еде. Вызывает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой применяет: Очень широкий круг — от подростков до взрослых. В отдельных краях легализована, яко оказывает большое влияние сверху цветовосприятие ее яко «неопасной», экстренно язык молодёжи.
Mikel Gerald says:
Снежок
Яко этто: Забористый стимулятор центральной нервической системы. Доставляет собой ярый порошок, чаще честь имею кланяться вдыхается после нос. Я мухой провоцирует привыкание.
Кто такой употребляет: Обычно — молодые штаты 20–40 лет, на том части изо безбедных миров слоя, часто — чтобы «вечеринок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Яко этто: Химический наркотик, производное амфетамина. Владеет инициирующим да психодислептическим эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой употребляет: Школьники и молодёжь, почаще сверху гулянках, рейвах и на клубах. Особенно моден в течение среде тех, кто такой отыскивает «новые чувства» чи быстрый кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения наркотик (марихуаны), охватывающих высокую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — подростки да молодые люди, как правило, на компании. Разблаговещены за относительной доступности (а) также домысла что касается «невредности».
Гашиш
Яко это: Наркотик, производимый с смолы растения каннабис. Обладает фигуру тёмных, густых брусков. Попыхивается сквозь сигареты чи специализированные устройства.
Кто такой применяет: Эти ну, кто такой использует марихуану — школьники, студенты, эпизодично сильнее взрослые покупатели, склонные для «релаксу» и изменению восприятия.
Марихуана
Что этто: Высушенные листья и цветочки растения каннабис. Употребляется путём курения, пореже — в еде. Побуждает успокоение, изменённое восприятие и эйфорию.
Кто употребляет: Очень широкий круг — от подростков до взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, яко оказывает большое влияние сверху цветовосприятие её яко «неопасной», экстренно язык молодёжи.
Cary Countryman says:
Кокаин
Что это: Забористый электростимулятор центральной нервной системы. Доставляет собою белый порошок, чаще честь имею кланяться вдыхается чрез нос. Быстро возбуждает привыкание.
Кто употребляет: Обычно — юные люди 20–40 лет, в течение том количестве изо обеспеченных миров слоя, часто — для «вечеринок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Синтетический эфир, производное амфетамина. Имеет ускоряющим равным образом психодислептическим эффектом. Распространён в течение наружности порошка или таблеток.
Кто такой применяет: Дети равным образом молодежь, чаще на гулянках, рейвах да в течение клубах. Экстренно востребован в течение сфере этих, кто отыскивает «новые ощущения» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), охватывающих рослую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — молодые люди также юные люди, как правило, в компании. Испущены в связи условной доступности да мифа о «безопасности».
Ямба
Яко этто: Эфир, производимый из надоедалы растения каннабис. Обладает фигуру тёмных, коренастых брусков. Курится сквозь сигареты или специализированные устройства.
Кто такой употребляет: Те ну, кто использует марихуану — школьники, студенты, эпизодично более старшие потребители, склонные буква «релаксу» а также изменению восприятия.
Марихуана
Что это: Высушенные листья а также цветочки растения каннабис. Применяется путем курения, пореже — в еде. Поднимает расслабление, изменённое восприятие равно эйфорию.
Кто применяет: Шибко широкий эклиптика — от подростков ут взрослых. В ТЕЧЕНИЕ некоторых краях легализована, что действует сверху цветовосприятие ее яко «безопасной», экстренно у молодёжи.
Deanna Canterbury says:
Кокаин
Что этто: Сильнодействующий стимулятор основной сердитой системы. Представляет собою белый порошок, чаще всего вдыхается после нос. Я мухой побуждает привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 лет, в течение этом количестве изо безбедных слоёв общества, через слово — для «тусовок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Что этто: Химический наркотик, происхождение амфетамина. Обладает инициирующим да психодислептическим эффектом. Распространён в пейзаже порошка чи таблеток.
Кто применяет: Молодые люди а также молодёжь, чаще на пирушках, рейвах да в клубах. Особенно моден на среде тех, кто ищет «новые чувства» чи быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения каннабис (марихуаны), держащих рослую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — дети также молодые люди, как правило, в компании. Разблаговещены ради относительной доступности да мифа о «безвредности».
Ямба
Что это: Эфир, производимый с надоедалы растения каннабис. Имеет форму тёмных, коренастых брусков. Курится после табак чи специализированные устройства.
Кто применяет: Те ну, кто утилизирует марихуану — подростки, студенты, эпизодично более совершеннолетние покупатели, расположенные ко «релаксу» и изменению восприятия.
Трава
Что этто: Подсушенные листья равным образом цветы растения каннабис. Употребляется путём курения, пореже — в течение еде. Побуждает успокоение, изменённое цветовосприятие и эйфорию.
Кто такой употребляет: Очень широченный круг — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных краях легализована, что действует сверху цветовосприятие ее яко «неопасной», особенно язык молодёжи.
Sandra Majeski says:
Кокаин
Яко этто: Сильный стимулятор основной нервной системы. Представляет собою белый порошок, почаще всего вдыхается через нос. Быстро вызывает привыкание.
Кто применяет: Элементарно — молодые люди 20–40 полет, в этом части изо обеспеченных миров окружения, часто — чтобы «вечеринок», увеличения энергии, убежденности да работоспособности.
Мефедрон
Яко этто: Химический эфир, происхождение амфетамина. Имеет инициирующим да галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто употребляет: Подростки а также молодёжь, чаще на тусовках, рейвах и в течение клубах. Экстренно известен в течение мире этих, кто такой отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения наркотик (марихуаны), содержащих рослую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — подростки и еще молодые люди, яко правило, на компании. Испущены из-за сравнительной доступности и домысла о «невредности».
Ямба
Что это: Эфир, штампуемый из смолы растения каннабис. Обладает форму тёмных, густых брусков. Курится через сигареты или особенные устройства.
Кто употребляет: Эти ну, кто утилизирует марихуану — подростки, учащиеся вузов, иногда более старшие потребители, расположенные буква «релаксу» а также изменению восприятия.
Марихуана
Что этто: Высушенные листья а также цветочки растения каннабис. Применяется путём курения, реже — в еде. Поднимает успокоение, изменённое восприятие а также эйфорию.
Кто такой употребляет: Очень широкий круг — через школьников до взрослых. В некоторых краях легализована, яко действует на цветовосприятие её как «безопасной», экстренно у молодёжи.
купить мдма says:
Кокаин
Яко это: Сильнодействующий стимулятор основной нервической системы.
Доставляет собой ярый цинаш, чаще честь имею кланяться вдыхается через нос.
Быстро возбуждает привыкание.
Кто употребляет: Обычно — молодые штаты 20–40 полет, на
том числе изо гарантированных
миров окружения, через слово — чтобы «вечеринок», повышения энергии, уверенности да работоспособности.
Мефедрон
Что это: Химический наркотик, выводное амфетамина.
Имеет ускоряющим и галлюциногенным эффектом.
Распространён на наружности порошка или таблеток.
Кто применяет: Дети и молодежь, чаще сверху пирушках, рейвах также в клубах.
Особенно популярен в течение слою этих, кто отыскивает «новоиспеченные чувства» чи юркий кайф.
Бошки
Яко это: Разговорное название
верхушек соцветий растения наркотик
(марихуаны), содержащих высокую
сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться —
молодые люди также молодые штаты,
как правило, в течение компании.
Испущены ради сравнительной доступности
(а) также домысла что касается «невредности».
Ямба
Что это: Эфир, штампуемый с надоедалы растения каннабис.
Быть владельцем фигуру тёмных,
плотного сложения брусков. Курится через табак
чи специализированные устройства.
Кто такой употребляет: Эти же,
кто использует марихуану — подростки, учащиеся, эпизодично более
старшие потребители, расположенные к «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Подсушенные листья равным образом
цветы растения каннабис. Применяется
путём курения, пореже — в течение еде.
Инициирует успокоение, изменённое восприятие и еще эйфорию.
Кто такой применяет: Очень широченный эклиптика
— через подростков ут взрослых.
В ТЕЧЕНИЕ отдельных краях легализована,
что оказывает большое влияние сверху восприятие её яко «неопасной», особенно язык молодёжи.
Marilou Guidry says:
Кокаин
Что этто: Сильнодействующий стимулятор стержневой нервическою системы. Рисует собой белый порошок, почаще всего вдыхается чрез нос. Я мухой вызывает привыкание.
Кто применяет: Элементарно — юные люди 20–40 полет, в течение том части из гарантированных слоёв слоя, часто — чтобы «вечеринок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Что это: Синтетический эфир, происхождение амфетамина. Имеет возбуждающим равным образом психодислептическим эффектом. Распространён на виде порошка или таблеток.
Кто такой употребляет: Дети а также молодежь, чаще сверху тусовках, рейвах также в течение клубах. Особенно востребован в мире этих, кто отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Что это: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), охватывающих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — подростки и еще юные штаты, как правило, в течение компании. Испущены в связи условной доступности равно домысла что касается «безопасности».
Гашиш
Что этто: Наркотик, производимый с смолы растения каннабис. Имеет форму тёмных, плотных брусков. Попыхивается вследствие табак чи специальные устройства.
Кто такой применяет: Эти же, кто использует марихуану — школьники, студенты, эпизодично более совершеннолетние потребители, склонные ко «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Подсушенные хряпа равным образом цветочки растения каннабис. Употребляется путем курения, пореже — в еде. Инициирует успокоение, изменённое восприятие и эйфорию.
Кто употребляет: Очень широкий круг — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, что влияет на цветовосприятие её как «безобидной», экстренно у молодёжи.
Hong Traylor says:
Снежок
Яко это: Забористый стимулятор центральной сердитой системы. Доставляет собой ярый цинаш, почаще честь имею кланяться вдыхается через нос. Я мухой возбуждает привыкание.
Кто применяет: Элементарно — юные штаты 20–40 полет, в течение том части с гарантированных слоёв окружения, часто — для «тусовок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Что этто: Химический наркотик, происхождение амфетамина. Иметь в своем распоряжении инициирующим равно галлюциногенным эффектом. Распространён в течение варианте порошка или таблеток.
Кто такой применяет: Школьники (а) также молодёжь, чаще на гулянках, рейвах и в течение клубах. Экстренно моден в течение среде тех, кто отыскивает «новоиспеченные чувства» чи юркий кайф.
Бошки
Что этто: Разговорное название макушек соцветий растения наркотик (марихуаны), сохраняющих высокую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — дети и юные штаты, как правило, в компании. Распространены ради условной доступности и мифа что касается «безвредности».
Ямба
Яко этто: Наркотик, производимый с надоедалы растения каннабис. Быть владельцем форму тёмных, коренастых брусков. Курится вследствие сигареты или спец. устройства.
Кто такой применяет: Эти же, кто такой утилизирует марихуану — подростки, студенты, иногда сильнее взрослые покупатели, склонные к «релаксу» и изменению восприятия.
Трава
Яко этто: Подсушенные листья а также цветы растения каннабис. Применяется путем курения, пореже — в течение еде. Поднимает расслабление, изменённое цветовосприятие равно эйфорию.
Кто такой применяет: Шибко широкий круг — от школьников до взрослых. НА некоторых сторонах легализована, что действует сверху цветовосприятие её яко «безобидной», экстренно язык молодёжи.
http://odezhdales.ru says:
Подбирайте комбинезоны для охоты с комфортным расположением http://odezhdales.ru// карманов.
Tamika Sigler says:
Кокаин
Яко это: Сильнодействующий электростимулятор центральной нервной системы. Рисует собою ярый порошок, чаще всего вдыхается через нос. Быстро вызывает привыкание.
Кто применяет: Обычно — юные штаты 20–40 полет, в этом количестве из гарантированных миров союзы, через слово — для «тусовок», повышения энергии, уверенности да работоспособности.
Мефедрон
Яко это: Синтетический эфир, производное амфетамина. Владеет инициирующим и психодислептическим эффектом. Распространён в течение наружности порошка или таблеток.
Кто употребляет: Молодые люди и молодежь, чаще на гулянках, рейвах да на клубах. Особенно востребован в мире тех, кто такой отыскивает «новоиспеченные ощущения» чи быстрый кайф.
Бошки
Что этто: Разговорное название элит соцветий растения наркотик (марихуаны), содержащих рослую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — подростки также молодые люди, яко правило, в течение компании. Распространены за относительной доступности (а) также домысла о «безвредности».
Ямба
Что это: Наркотик, штампуемый из надоедалы растения каннабис. Обладает форму тёмных, коренастых брусков. Курится после сигареты чи специальные устройства.
Кто применяет: Те же, кто утилизирует марихуану — школьники, студенты, эпизодично более взрослые покупатели, склонные для «релаксу» и еще изменению восприятия.
Марихуана
Яко этто: Подсушенные хряпа и еще цветочки растения каннабис. Употребляется путем курения, пореже — в течение еде. Инициирует расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой употребляет: Шибко широкий эклиптика — от подростков ут взрослых. НА отдельных государствах легализована, что действует сверху цветовосприятие её как «неопасной», экстренно у молодёжи.
Brent Madsen says:
Снежок
Что это: Сильный стимулятор основной сердитой системы. Доставляет собой белый порошок, почаще честь имею кланяться вдыхается после нос. Я мухой возбуждает привыкание.
Кто такой применяет: Элементарно — молодые люди 20–40 лет, в течение том количестве из гарантированных пластов окружения, через слово — чтобы «вечеринок», подъема энергии, уверенности а также работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, дериват амфетамина. Имеет возбуждающим равным образом галлюциногенным эффектом. Распространён на варианте порошка чи таблеток.
Кто применяет: Подростки и молодежь, почаще на вечеринках, рейвах и в клубах. Экстренно моден в сфере тех, кто такой ищет «новые ощущения» или быстрый кайф.
Бошки
Яко это: Разговорное этноним элит соцветий растения каннабис (марихуаны), сохраняющих рослую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — дети также юные люди, яко шест, в течение компании. Разблаговещены в связи сравнительной доступности равно домысла что касается «невредности».
Ямба
Яко этто: Наркотик, производимый изо смолы растения каннабис. Обладает фигуру тёмных, плотных брусков. Курится после табак чи особенные устройства.
Кто применяет: Те ну, кто такой использует марихуану — подростки, учащиеся вузов, иногда более совершеннолетные покупатели, склонные к «релаксу» и еще изменению восприятия.
Марихуана
Яко это: Подсушенные хряпа и еще цветы растения каннабис. Употребляется путём курения, пореже — в течение еде. Побуждает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой применяет: Очень широкий эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, яко влияет на цветовосприятие ее яко «безопасной», экстренно у молодёжи.
Ludie MacRory says:
Кокаин
Яко этто: Сильнодействующий стимулятор центральной сердитой системы. Рисует собой белый цинаш, чаще честь имею кланяться вдыхается через нос. Я мухой возбуждает привыкание.
Кто употребляет: Элементарно — юные штаты 20–40 полет, в течение этом числе с обеспеченных пластов общества, часто — чтобы «тусовок», повышения энергии, убежденности да работоспособности.
Мефедрон
Что это: Химический эфир, дериват амфетамина. Обладает инициирующим равным образом психодислептическим эффектом. Распространён на пейзаже порошка или таблеток.
Кто такой употребляет: Молодые люди а также молодёжь, чаще на вечеринках, рейвах и еще в течение клубах. Экстренно популярен на слою тех, кто такой отыскивает «новые чувства» или юркий кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), держащих высокую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — дети да юные штаты, яко правило, на компании. Излиты ради условной доступности да мифа о «безвредности».
Гашиш
Яко этто: Эфир, производимый из надоедалы растения каннабис. Имеет фигуру тёмных, плотного сложения брусков. Курится вследствие сигареты или специальные устройства.
Кто применяет: Те же, кто такой использует марихуану — подростки, студенты, иногда сильнее совершеннолетние потребители, расположенные для «релаксу» да изменению восприятия.
Трава
Яко это: Высушенные хряпа и цветочки растения каннабис. Применяется путем курения, пореже — в еде. Инициирует расслабление, изменённое восприятие а также эйфорию.
Кто такой применяет: Очень широкий круг — через подростков до взрослых. В ТЕЧЕНИЕ отдельных краях легализована, что оказывает большое влияние на восприятие ее яко «неопасной», особенно язык молодёжи.
Annie Inglis says:
Кокаин
Яко это: Забористый электростимулятор стержневой нервической системы. Доставляет собой ярый цинаш, чаще честь имею кланяться вдыхается после нос. Быстро побуждает привыкание.
Кто употребляет: Элементарно — юные штаты 20–40 лет, на том числе изо гарантированных пластов общества, часто — для «вечеринок», увеличения энергии, убежденности а также работоспособности.
Мефедрон
Яко это: Синтетический наркотик, производное амфетамина. Имеет стимулирующим и галлюциногенным эффектом. Распространён в течение виде порошка или таблеток.
Кто употребляет: Школьники равным образом молодежь, чаще на вечеринках, рейвах и в течение клубах. Особенно востребован в слою этих, кто отыскивает «новые ощущения» или юркий кайф.
Бошки
Что этто: Разговорное название элит соцветий растения наркотик (марихуаны), содержащих высокую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — подростки и еще молодые люди, как правило, на компании. Испущены за сравнительной доступности да домысла о «безопасности».
Гашиш
Что этто: Эфир, производимый с надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, плотного сложения брусков. Курится сквозь табак чи особенные устройства.
Кто такой употребляет: Эти же, кто такой утилизирует марихуану — школьники, учащиеся вузов, иногда сильнее старшие покупатели, склонные буква «релаксу» и еще изменению восприятия.
Трава
Что это: Высушенные хряпа а также цветочки растения каннабис. Применяется путем курения, реже — в течение еде. Побуждает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто применяет: Очень широченный эклиптика — через школьников до взрослых. В ТЕЧЕНИЕ отдельных странах легализована, яко действует сверху восприятие ее как «неопасной», особенно у молодёжи.
Brandy Mackay says:
Снежок
Яко это: Сильнодействующий электростимулятор центральной нервическою системы. Доставляет собою белый порошок, чаще честь имею кланяться вдыхается через нос. Быстро провоцирует привыкание.
Кто употребляет: Обычно — молодые штаты 20–40 лет, в течение том количестве изо безбедных пластов союзы, часто — чтобы «вечеринок», повышения энергии, уверенности и работоспособности.
Мефедрон
Яко это: Химический эфир, производное амфетамина. Обладает возбуждающим и психодислептическим эффектом. Распространён в виде порошка или таблеток.
Кто употребляет: Подростки и молодежь, почаще сверху гулянках, рейвах и еще в течение клубах. Особенно востребован в слою этих, кто такой отыскивает «последние ощущения» чи юркий кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения каннабис (марихуаны), содержащих рослую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — подростки и юные штаты, яко шест, в течение компании. Излиты из-за сравнительной доступности да мифа что касается «безвредности».
Ямба
Яко этто: Наркотик, штампуемый изо смолы растения каннабис. Обладает форму тёмных, коренастых брусков. Попыхивается после табак или специализированные устройства.
Кто такой применяет: Эти же, кто использует марихуану — школьники, учащиеся, иногда более старшие покупатели, склонные ко «релаксу» и еще изменению восприятия.
Трава
Яко это: Высушенные листья и еще цветы растения каннабис. Применяется путём курения, реже — на еде. Побуждает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой употребляет: Шибко широкий круг — от школьников ут взрослых. В некоторых странах легализована, яко действует сверху восприятие ее яко «безобидной», особенно язык молодёжи.
Mervin Silvestri says:
Снежок
Яко это: Забористый стимулятор основной нервической системы. Доставляет собой белый цинаш, почаще всего вдыхается чрез нос. Быстро провоцирует привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 полет, на том количестве из безбедных пластов общества, часто — для «вечеринок», повышения энергии, убежденности и работоспособности.
Мефедрон
Яко это: Химический эфир, выводное амфетамина. Владеет стимулирующим равно галлюциногенным эффектом. Распространён на пейзаже порошка или таблеток.
Кто такой употребляет: Подростки (а) также молодёжь, почаще на пирушках, рейвах да на клубах. Особенно моден в течение сфере этих, кто такой отыскивает «новые чувства» или юркий кайф.
Бошки
Что это: Разговорное название макушек соцветий растения каннабис (марихуаны), охватывающих рослую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — молодые и еще молодые люди, как шест, в течение компании. Разблаговещены ради сравнительной доступности да домысла о «безвредности».
Гашиш
Яко это: Наркотик, производимый из смолы растения каннабис. Обладает фигуру тёмных, коренастых брусков. Курится после сигареты или спец. устройства.
Кто употребляет: Те ну, кто использует марихуану — школьники, студенты, иногда более совершеннолетные потребители, склонные буква «релаксу» и изменению восприятия.
Трава
Что это: Подсушенные листья и цветы растения каннабис. Употребляется путем курения, реже — в течение еде. Инициирует расслабление, изменённое цветовосприятие и эйфорию.
Кто применяет: Шибко широкий круг — от школьников до взрослых. В некоторых краях легализована, что действует сверху цветовосприятие её как «загоришься», особенно язык молодёжи.
Lauren Calder says:
Снежок
Яко это: Сильнодействующий стимулятор центральной нервическою системы. Представляет собою белый порошок, почаще всего вдыхается чрез нос. Быстро вызывает привыкание.
Кто применяет: Элементарно — юные штаты 20–40 полет, на этом количестве изо безбедных пластов общества, часто — для «вечеринок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Что это: Химический наркотик, дериват амфетамина. Обладает возбуждающим и психодислептическим эффектом. Распространён в наружности порошка чи таблеток.
Кто такой применяет: Дети (а) также молодежь, чаще сверху пирушках, рейвах также на клубах. Особенно популярен в мире тех, кто ищет «новоиспеченные ощущения» или юркий кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения каннабис (марихуаны), держащих рослую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — молодые также юные люди, яко правило, на компании. Испущены в связи сравнительной доступности да мифа что касается «безвредности».
Гашиш
Что это: Наркотик, производимый изо смолы растения каннабис. Имеет фигуру тёмных, густых брусков. Попыхивается сквозь сигареты или специальные устройства.
Кто такой применяет: Эти же, кто использует марихуану — подростки, учащиеся, эпизодично более совершеннолетные потребители, склонные для «релаксу» а также изменению восприятия.
Марихуана
Что это: Подсушенные хряпа и цветочки растения каннабис. Употребляется путём курения, пореже — на еде. Вызывает успокоение, изменённое восприятие равно эйфорию.
Кто применяет: Шибко широченный круг — от школьников ут взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, яко действует на восприятие ее как «безопасной», особенно у молодёжи.
Daniela Money says:
Снежок
Яко этто: Сильный электростимулятор основной сердитой системы. Представляет собой ярый порошок, чаще всего вдыхается посредством нос. Я мухой провоцирует привыкание.
Кто такой употребляет: Элементарно — юные штаты 20–40 лет, в течение том числе изо снабженных слоёв общества, через слово — чтобы «тусовок», увеличения энергии, уверенности и еще работоспособности.
Мефедрон
Яко это: Химический эфир, производное амфетамина. Иметь в своем распоряжении стимулирующим да галлюциногенным эффектом. Распространён на наружности порошка чи таблеток.
Кто такой употребляет: Дети (а) также молодёжь, чаще на пирушках, рейвах и еще в течение клубах. Особенно известен в течение сфере тех, кто отыскивает «новоиспеченные чувства» или быстрый кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения каннабис (марихуаны), охватывающих рослую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — подростки и молодые штаты, как правило, в течение компании. Распространены за условной доступности (а) также домысла что касается «невредности».
Гашиш
Что это: Эфир, производимый из надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, плотного сложения брусков. Курится вследствие сигареты или специализированные устройства.
Кто такой применяет: Те ну, кто использует марихуану — подростки, учащиеся, иногда более совершеннолетные покупатели, склонные к «релаксу» а также изменению восприятия.
Трава
Что это: Высушенные хряпа и цветочки растения каннабис. Применяется путем курения, реже — на еде. Инициирует успокоение, изменённое восприятие а также эйфорию.
Кто такой употребляет: Очень широкий эклиптика — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, яко воздействует сверху восприятие ее яко «неопасной», особенно у молодёжи.
Breanna Timmerman says:
Снежок
Яко это: Сильнодействующий стимулятор центральной нервной системы. Представляет собой ярый цинаш, чаще честь имею кланяться вдыхается посредством нос. Быстро провоцирует привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 лет, на том числе изо гарантированных слоёв союзы, через слово — чтобы «тусовок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Что этто: Синтетический наркотик, производное амфетамина. Имеет стимулирующим равно психодислептическим эффектом. Распространён на варианте порошка или таблеток.
Кто такой применяет: Школьники а также молодёжь, почаще на гулянках, рейвах да в течение клубах. Экстренно популярен в течение среде тех, кто отыскивает «новые чувства» или юркий кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения каннабис (марихуаны), содержащих высокую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — дети да юные штаты, как правило, в течение компании. Испущены в связи сравнительной доступности да домысла что касается «безопасности».
Ямба
Что это: Эфир, штампуемый с смолы растения каннабис. Имеет форму тёмных, плотных брусков. Попыхивается вследствие табак чи спец. устройства.
Кто такой применяет: Эти ну, кто такой утилизирует марихуану — школьники, учащиеся вузов, эпизодично более совершеннолетные покупатели, расположенные для «релаксу» и еще изменению восприятия.
Трава
Что это: Высушенные хряпа а также цветы растения каннабис. Применяется путем курения, пореже — на еде. Побуждает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой употребляет: Шибко широкий круг — от подростков до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, что действует на цветовосприятие её как «загоришься», особенно язык молодёжи.
Gary Goddard says:
Кокаин
Что этто: Сильнодействующий электростимулятор основной нервной системы. Представляет собою белый цинаш, почаще честь имею кланяться вдыхается посредством нос. Быстро побуждает привыкание.
Кто такой применяет: Обычно — молодые штаты 20–40 полет, в течение том количестве с гарантированных пластов слоя, часто — для «тусовок», подъема энергии, убежденности и еще работоспособности.
Мефедрон
Яко этто: Синтетический эфир, дериват амфетамина. Иметь в своем распоряжении стимулирующим и психодислептическим эффектом. Распространён в течение наружности порошка чи таблеток.
Кто употребляет: Школьники равным образом молодежь, чаще сверху вечеринках, рейвах да на клубах. Особенно популярен в течение мире тех, кто отыскивает «последние чувства» или юркий кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения каннабис (марихуаны), сохраняющих высокую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — дети да юные штаты, яко шест, в компании. Испущены ради сравнительной доступности равно мифа о «безвредности».
Гашиш
Яко это: Эфир, штампуемый из надоедалы растения каннабис. Имеет форму тёмных, плотных брусков. Попыхивается сквозь сигареты чи спец. устройства.
Кто такой употребляет: Те ну, кто такой использует марихуану — подростки, учащиеся, иногда более совершеннолетние покупатели, склонные буква «релаксу» и еще изменению восприятия.
Трава
Яко это: Высушенные листья равным образом цветочки растения каннабис. Применяется путём курения, пореже — в течение еде. Инициирует расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой применяет: Очень широченный круг — от подростков до взрослых. В ТЕЧЕНИЕ отдельных краях легализована, что оказывает большое влияние сверху восприятие ее как «безобидной», особенно язык молодёжи.
Hye Singleton says:
Кокаин
Что этто: Забористый стимулятор центральной нервическою системы. Доставляет собой ярый порошок, почаще честь имею кланяться вдыхается через нос. Я мухой провоцирует привыкание.
Кто такой употребляет: Элементарно — юные штаты 20–40 полет, в течение том количестве изо безбедных слоёв окружения, часто — для «тусовок», увеличения энергии, убежденности да работоспособности.
Мефедрон
Яко этто: Химический эфир, дериват амфетамина. Владеет ускоряющим и галлюциногенным эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой употребляет: Подростки равным образом молодёжь, чаще сверху гулянках, рейвах и еще на клубах. Экстренно популярен в течение мире этих, кто ищет «новоиспеченные чувства» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), держащих высокую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — молодые также молодые штаты, яко правило, в течение компании. Распространены за сравнительной доступности равно мифа что касается «невредности».
Ямба
Что это: Эфир, производимый из надоедалы растения каннабис. Имеет форму тёмных, густых брусков. Попыхивается сквозь табак чи специализированные устройства.
Кто такой употребляет: Эти же, кто такой утилизирует марихуану — школьники, учащиеся, иногда более старшие потребители, расположенные буква «релаксу» и изменению восприятия.
Трава
Что этто: Высушенные листья и цветочки растения каннабис. Употребляется путем курения, реже — в течение еде. Вызывает расслабление, изменённое восприятие и эйфорию.
Кто применяет: Шибко широченный круг — через школьников ут взрослых. В некоторых государствах легализована, что воздействует на цветовосприятие её как «безопасной», экстренно язык молодёжи.
Thad Elliot says:
Снежок
Что это: Забористый электростимулятор стержневой нервической системы. Исполнять роль собою ярый порошок, чаще честь имею кланяться вдыхается через нос. Быстро вызывает привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 полет, в течение том части с обеспеченных миров окружения, часто — чтобы «тусовок», подъема энергии, убежденности и работоспособности.
Мефедрон
Что это: Химический наркотик, производное амфетамина. Иметь в своем распоряжении стимулирующим да психодислептическим эффектом. Распространён в течение виде порошка чи таблеток.
Кто применяет: Молодые люди (а) также молодежь, почаще сверху гулянках, рейвах и на клубах. Экстренно востребован в течение слою тех, кто такой отыскивает «новоиспеченные ощущения» чи быстрый кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения наркотик (марихуаны), держащих рослую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые люди также молодые штаты, как правило, на компании. Излиты в связи сравнительной доступности (а) также мифа что касается «невредности».
Гашиш
Что это: Наркотик, производимый изо смолы растения каннабис. Быть владельцем фигуру тёмных, густых брусков. Попыхивается после табак чи особенные устройства.
Кто такой употребляет: Те же, кто такой утилизирует марихуану — подростки, студенты, иногда сильнее совершеннолетние потребители, расположенные буква «релаксу» да изменению восприятия.
Марихуана
Яко это: Высушенные хряпа а также цветочки растения каннабис. Применяется путём курения, пореже — на еде. Поднимает расслабление, изменённое восприятие и еще эйфорию.
Кто употребляет: Очень широкий круг — через подростков до взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, яко оказывает большое влияние сверху восприятие ее яко «безопасной», особенно у молодёжи.
Santo Camidge says:
Кокаин
Что этто: Сильнодействующий электростимулятор центральной нервической системы. Рисует собой ярый порошок, чаще честь имею кланяться вдыхается посредством нос. Я мухой провоцирует привыкание.
Кто применяет: Обычно — молодые штаты 20–40 лет, в этом количестве из безбедных пластов союзы, через слово — для «вечеринок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Химический наркотик, дериват амфетамина. Иметь в своем распоряжении возбуждающим и психодислептическим эффектом. Распространён в виде порошка чи таблеток.
Кто такой употребляет: Подростки равным образом молодёжь, почаще на тусовках, рейвах и еще на клубах. Особенно популярен в сфере этих, кто такой отыскивает «новые чувства» или юркий кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения наркотик (марихуаны), сохраняющих рослую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — молодые да молодые люди, как шест, в течение компании. Распространены ради условной доступности да домысла о «безвредности».
Ямба
Что этто: Наркотик, производимый из надоедалы растения каннабис. Быть владельцем фигуру тёмных, коренастых брусков. Попыхивается вследствие табак чи специальные устройства.
Кто такой употребляет: Те же, кто использует марихуану — школьники, учащиеся вузов, эпизодично сильнее старшие покупатели, склонные к «релаксу» и изменению восприятия.
Трава
Что это: Высушенные хряпа и цветы растения каннабис. Употребляется путём курения, пореже — в еде. Поднимает расслабление, изменённое восприятие равно эйфорию.
Кто такой употребляет: Очень широкий круг — от школьников до взрослых. В ТЕЧЕНИЕ некоторых краях легализована, яко действует сверху цветовосприятие её как «загоришься», экстренно язык молодёжи.
Martina Fletcher says:
Снежок
Что это: Сильнодействующий электростимулятор основной нервическою системы. Доставляет собою белый цинаш, почаще всего вдыхается чрез нос. Быстро вызывает привыкание.
Кто употребляет: Обычно — молодые люди 20–40 лет, в течение том числе изо гарантированных пластов окружения, через слово — чтобы «вечеринок», увеличения энергии, убежденности да работоспособности.
Мефедрон
Что этто: Синтетический наркотик, выводное амфетамина. Иметь в своем распоряжении возбуждающим равно галлюциногенным эффектом. Распространён в течение варианте порошка или таблеток.
Кто применяет: Школьники (а) также молодёжь, чаще на вечеринках, рейвах и еще в течение клубах. Экстренно известен в течение сфере этих, кто ищет «новоиспеченные чувства» или юркий кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), охватывающих высокую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — дети и еще молодые люди, как шест, в течение компании. Испущены из-за относительной доступности да мифа о «безвредности».
Гашиш
Что этто: Наркотик, производимый с смолы растения каннабис. Имеет форму тёмных, густых брусков. Курится сквозь табак чи особенные устройства.
Кто такой применяет: Эти ну, кто такой утилизирует марихуану — школьники, учащиеся вузов, иногда сильнее взрослые покупатели, склонные для «релаксу» и изменению восприятия.
Трава
Что это: Подсушенные листья равным образом цветочки растения каннабис. Употребляется путём курения, реже — в еде. Вызывает успокоение, изменённое цветовосприятие и эйфорию.
Кто употребляет: Шибко широченный эклиптика — через школьников до взрослых. В некоторых сторонах легализована, яко влияет сверху восприятие её как «загоришься», экстренно у молодёжи.
Shella Emmons says:
Снежок
Яко этто: Сильнодействующий стимулятор центральной сердитой системы. Исполнять роль собою белый порошок, почаще всего вдыхается после нос. Я мухой провоцирует привыкание.
Кто такой применяет: Обычно — молодые штаты 20–40 полет, в течение том количестве с обеспеченных миров окружения, через слово — чтобы «тусовок», увеличения энергии, убежденности да работоспособности.
Мефедрон
Что этто: Химический наркотик, дериват амфетамина. Владеет возбуждающим равным образом галлюциногенным эффектом. Распространён в пейзаже порошка чи таблеток.
Кто употребляет: Подростки а также молодежь, почаще сверху пирушках, рейвах также в течение клубах. Особенно известен в мире этих, кто такой отыскивает «новоиспеченные чувства» или юркий кайф.
Бошки
Яко это: Разговорное этноним элит соцветий растения каннабис (марихуаны), охватывающих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — молодые люди также молодые люди, яко правило, в течение компании. Разблаговещены ради условной доступности и домысла о «безопасности».
Гашиш
Что этто: Эфир, штампуемый с надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, коренастых брусков. Попыхивается сквозь сигареты чи специализированные устройства.
Кто применяет: Те же, кто утилизирует марихуану — подростки, студенты, эпизодично более старшие потребители, склонные к «релаксу» и изменению восприятия.
Трава
Что этто: Высушенные листья и еще цветы растения каннабис. Применяется путём курения, реже — в еде. Побуждает успокоение, изменённое восприятие а также эйфорию.
Кто применяет: Шибко широкий эклиптика — от подростков до взрослых. В некоторых краях легализована, что воздействует на цветовосприятие ее как «неопасной», особенно язык молодёжи.
Adeline Streit says:
Кокаин
Что этто: Сильный электростимулятор центральной нервной системы. Исполнять роль собою белый порошок, чаще всего вдыхается чрез нос. Я мухой вызывает привыкание.
Кто употребляет: Элементарно — юные штаты 20–40 полет, на этом числе изо гарантированных пластов общества, через слово — для «вечеринок», повышения энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Синтетический наркотик, производное амфетамина. Иметь в своем распоряжении инициирующим и психодислептическим эффектом. Распространён в варианте порошка чи таблеток.
Кто употребляет: Подростки и молодёжь, чаще сверху пирушках, рейвах да в клубах. Особенно моден на мире этих, кто такой отыскивает «новоиспеченные ощущения» или быстрый кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), охватывающих рослую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — дети и еще юные люди, как правило, в компании. Испущены в связи условной доступности равно домысла о «безвредности».
Гашиш
Яко это: Наркотик, штампуемый с смолы растения каннабис. Иметь в распоряжении фигуру тёмных, коренастых брусков. Курится через табак чи специализированные устройства.
Кто такой применяет: Те же, кто такой использует марихуану — подростки, студенты, эпизодично сильнее взрослые покупатели, склонные к «релаксу» и изменению восприятия.
Марихуана
Что это: Высушенные хряпа а также цветы растения каннабис. Применяется путем курения, пореже — в течение еде. Побуждает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой применяет: Очень широкий круг — через школьников ут взрослых. НА отдельных краях легализована, яко влияет сверху восприятие её яко «неопасной», экстренно у молодёжи.
Shelton Waterman says:
Снежок
Что этто: Сильный электростимулятор центральной нервической системы. Рисует собой белый порошок, почаще всего вдыхается чрез нос. Я мухой возбуждает привыкание.
Кто применяет: Обычно — юные штаты 20–40 лет, на том количестве из снабженных миров союзы, часто — для «тусовок», подъема энергии, уверенности да работоспособности.
Мефедрон
Что это: Синтетический эфир, выводное амфетамина. Имеет инициирующим и галлюциногенным эффектом. Распространён на наружности порошка чи таблеток.
Кто употребляет: Подростки (а) также молодёжь, чаще сверху гулянках, рейвах также в течение клубах. Экстренно известен в среде тех, кто ищет «новые чувства» или юркий кайф.
Бошки
Что это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), охватывающих высокую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — молодые люди также молодые люди, как шест, в течение компании. Распространены ради сравнительной доступности и мифа о «безопасности».
Ямба
Что этто: Эфир, производимый изо надоедалы растения каннабис. Обладает форму тёмных, густых брусков. Курится вследствие табак чи особенные устройства.
Кто такой применяет: Те же, кто такой утилизирует марихуану — школьники, учащиеся вузов, эпизодично более старшие потребители, расположенные буква «релаксу» и еще изменению восприятия.
Марихуана
Что это: Высушенные листья равным образом цветочки растения каннабис. Применяется путём курения, пореже — на еде. Инициирует успокоение, изменённое восприятие и эйфорию.
Кто такой применяет: Шибко широченный эклиптика — от подростков до взрослых. НА некоторых краях легализована, что действует сверху цветовосприятие ее яко «безобидной», экстренно у молодёжи.
Ervin Toliman says:
Кокаин
Яко этто: Забористый электростимулятор центральной нервической системы. Рисует собой белый цинаш, чаще всего вдыхается через нос. Я мухой вызывает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 лет, в течение этом количестве с обеспеченных слоёв союзы, часто — чтобы «вечеринок», повышения энергии, уверенности и работоспособности.
Мефедрон
Яко это: Синтетический наркотик, выводное амфетамина. Обладает стимулирующим равным образом галлюциногенным эффектом. Распространён в виде порошка чи таблеток.
Кто такой применяет: Школьники и молодёжь, почаще сверху тусовках, рейвах и в течение клубах. Экстренно востребован на мире этих, кто такой отыскивает «новоиспеченные чувства» или юркий кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), держащих высокую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — подростки и молодые люди, яко правило, на компании. Излиты ради сравнительной доступности (а) также домысла о «безвредности».
Ямба
Яко этто: Наркотик, производимый с смолы растения каннабис. Имеет форму тёмных, плотных брусков. Курится сквозь сигареты или специализированные устройства.
Кто такой применяет: Эти ну, кто утилизирует марихуану — школьники, учащиеся, эпизодично сильнее совершеннолетные потребители, склонные для «релаксу» да изменению восприятия.
Марихуана
Яко это: Подсушенные листья равным образом цветочки растения каннабис. Применяется путем курения, реже — в еде. Поднимает расслабление, изменённое восприятие и еще эйфорию.
Кто применяет: Шибко широкий эклиптика — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых странах легализована, что действует сверху цветовосприятие ее как «неопасной», особенно язык молодёжи.
George Leddy says:
Снежок
Яко этто: Забористый электростимулятор основной нервической системы. Исполнять роль собой белый порошок, чаще всего вдыхается через нос. Быстро вызывает привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 полет, на том количестве изо гарантированных миров слоя, через слово — для «вечеринок», подъема энергии, убежденности да работоспособности.
Мефедрон
Яко этто: Химический эфир, производное амфетамина. Владеет возбуждающим равным образом психодислептическим эффектом. Распространён в течение наружности порошка или таблеток.
Кто такой применяет: Дети равным образом молодёжь, почаще сверху пирушках, рейвах да в течение клубах. Особенно востребован в течение среде этих, кто отыскивает «новоиспеченные ощущения» чи быстрый кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), держащих высокую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — молодые люди и юные люди, как шест, на компании. Испущены ради относительной доступности (а) также домысла о «безвредности».
Ямба
Яко этто: Наркотик, штампуемый изо смолы растения каннабис. Обладает форму тёмных, густых брусков. Курится сквозь табак чи специализированные устройства.
Кто такой применяет: Эти ну, кто утилизирует марихуану — подростки, студенты, иногда более старшие покупатели, склонные ко «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Подсушенные листья и еще цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Вызывает успокоение, изменённое цветовосприятие а также эйфорию.
Кто такой применяет: Шибко широкий эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, что действует на цветовосприятие ее яко «безобидной», экстренно у молодёжи.
Soon Buggy says:
Снежок
Яко этто: Сильнодействующий электростимулятор центральной нервическою системы. Исполнять роль собой белый порошок, почаще честь имею кланяться вдыхается посредством нос. Быстро провоцирует привыкание.
Кто такой применяет: Элементарно — молодые люди 20–40 лет, на том числе с снабженных пластов общества, через слово — чтобы «вечеринок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Что это: Синтетический наркотик, производное амфетамина. Обладает стимулирующим и психодислептическим эффектом. Распространён в виде порошка чи таблеток.
Кто такой применяет: Дети и молодежь, чаще сверху гулянках, рейвах также в клубах. Экстренно востребован в мире этих, кто ищет «новые ощущения» или быстрый кайф.
Бошки
Что этто: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), охватывающих высокую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — молодые люди и юные люди, как правило, в течение компании. Излиты в связи сравнительной доступности (а) также мифа что касается «невредности».
Ямба
Что этто: Эфир, штампуемый с смолы растения каннабис. Имеет форму тёмных, плотного сложения брусков. Попыхивается после сигареты чи особенные устройства.
Кто применяет: Те же, кто использует марихуану — подростки, учащиеся, иногда более взрослые покупатели, склонные буква «релаксу» и еще изменению восприятия.
Марихуана
Что это: Высушенные листья и еще цветы растения каннабис. Применяется путем курения, реже — на еде. Вызывает расслабление, изменённое цветовосприятие и эйфорию.
Кто применяет: Шибко широкий эклиптика — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных странах легализована, что действует на восприятие её яко «безопасной», особенно у молодёжи.
Lino Kingsmill says:
You ought to be a part of a contest for one of the finest blogs on the internet. I am going to recommend this website!
George Mendes says:
Снежок
Что этто: Забористый стимулятор центральной нервной системы. Рисует собою белый порошок, чаще честь имею кланяться вдыхается через нос. Быстро вызывает привыкание.
Кто употребляет: Элементарно — молодые штаты 20–40 полет, в течение этом количестве с безбедных пластов окружения, через слово — чтобы «вечеринок», подъема энергии, уверенности и работоспособности.
Мефедрон
Что это: Синтетический наркотик, происхождение амфетамина. Владеет инициирующим равным образом галлюциногенным эффектом. Распространён в течение наружности порошка чи таблеток.
Кто такой применяет: Молодые люди равным образом молодежь, чаще на пирушках, рейвах также на клубах. Экстренно моден в течение сфере тех, кто такой отыскивает «новые ощущения» чи юркий кайф.
Бошки
Что это: Разговорное название элит соцветий растения каннабис (марихуаны), держащих рослую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — подростки да молодые штаты, как правило, в течение компании. Распространены в связи условной доступности равно мифа что касается «безвредности».
Ямба
Что этто: Наркотик, производимый из надоедалы растения каннабис. Обладает форму тёмных, коренастых брусков. Курится через сигареты или специализированные устройства.
Кто употребляет: Эти же, кто такой утилизирует марихуану — школьники, учащиеся, иногда сильнее взрослые потребители, склонные буква «релаксу» а также изменению восприятия.
Трава
Что этто: Подсушенные хряпа и еще цветочки растения каннабис. Употребляется путём курения, реже — на еде. Вызывает расслабление, изменённое восприятие равно эйфорию.
Кто такой употребляет: Очень широкий круг — через подростков ут взрослых. В ТЕЧЕНИЕ некоторых странах легализована, что влияет сверху цветовосприятие ее как «неопасной», особенно язык молодёжи.
Lurlene Fawsitt says:
Кокаин
Что это: Сильный стимулятор центральной нервическою системы. Исполнять роль собой ярый цинаш, почаще честь имею кланяться вдыхается посредством нос. Быстро вызывает привыкание.
Кто такой употребляет: Обычно — молодые люди 20–40 полет, в том числе из снабженных миров слоя, часто — для «вечеринок», подъема энергии, уверенности и еще работоспособности.
Мефедрон
Что этто: Химический эфир, производное амфетамина. Обладает ускоряющим и психодислептическим эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой употребляет: Подростки и молодежь, чаще на пирушках, рейвах да в течение клубах. Особенно моден в течение мире тех, кто такой отыскивает «новые чувства» или быстрый кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), содержащих рослую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые да юные люди, яко шест, на компании. Распространены за относительной доступности (а) также мифа что касается «безвредности».
Ямба
Что это: Эфир, производимый изо смолы растения каннабис. Имеет форму тёмных, коренастых брусков. Попыхивается вследствие сигареты или специализированные устройства.
Кто такой употребляет: Эти ну, кто использует марихуану — подростки, студенты, иногда сильнее старшие покупатели, расположенные ко «релаксу» а также изменению восприятия.
Марихуана
Яко это: Высушенные листья и еще цветы растения каннабис. Употребляется путём курения, реже — в еде. Побуждает успокоение, изменённое цветовосприятие а также эйфорию.
Кто такой применяет: Очень широкий круг — через подростков до взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, яко действует на восприятие ее яко «безобидной», экстренно язык молодёжи.
Christine Schnieders says:
Кокаин
Что этто: Сильный стимулятор стержневой нервной системы. Представляет собою ярый цинаш, чаще всего вдыхается чрез нос. Быстро возбуждает привыкание.
Кто употребляет: Обычно — юные штаты 20–40 лет, в течение том количестве из безбедных пластов общества, часто — для «тусовок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Яко это: Химический эфир, происхождение амфетамина. Владеет возбуждающим да галлюциногенным эффектом. Распространён в варианте порошка чи таблеток.
Кто такой применяет: Молодые люди (а) также молодежь, почаще сверху гулянках, рейвах также на клубах. Особенно моден в течение слою тех, кто такой отыскивает «новоиспеченные чувства» чи юркий кайф.
Бошки
Что это: Разговорное этноним элит соцветий растения наркотик (марихуаны), охватывающих рослую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — молодые люди и молодые штаты, как правило, в течение компании. Распространены за сравнительной доступности (а) также домысла что касается «невредности».
Ямба
Что этто: Наркотик, производимый с смолы растения каннабис. Быть владельцем фигуру тёмных, плотных брусков. Курится сквозь табак чи спец. устройства.
Кто такой употребляет: Те же, кто такой использует марихуану — школьники, учащиеся, иногда сильнее взрослые потребители, склонные для «релаксу» и изменению восприятия.
Трава
Яко это: Подсушенные листья и цветочки растения каннабис. Применяется путём курения, реже — в течение еде. Инициирует успокоение, изменённое цветовосприятие равно эйфорию.
Кто такой применяет: Очень широченный эклиптика — через подростков до взрослых. НА некоторых сторонах легализована, что воздействует на восприятие её яко «загоришься», особенно у молодёжи.
Florencia Mahurin says:
Кокаин
Яко этто: Сильный стимулятор стержневой нервной системы. Представляет собою ярый порошок, чаще честь имею кланяться вдыхается после нос. Быстро возбуждает привыкание.
Кто применяет: Элементарно — юные штаты 20–40 полет, в течение том числе с безбедных миров союзы, через слово — чтобы «вечеринок», увеличения энергии, уверенности а также работоспособности.
Мефедрон
Что это: Химический эфир, производное амфетамина. Имеет стимулирующим и галлюциногенным эффектом. Распространён в течение варианте порошка чи таблеток.
Кто употребляет: Молодые люди равным образом молодёжь, чаще сверху вечеринках, рейвах и еще в течение клубах. Экстренно востребован в течение слою этих, кто ищет «новые чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное название макушек соцветий растения наркотик (марихуаны), охватывающих рослую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — молодые также юные люди, как шест, в течение компании. Испущены в связи условной доступности равно мифа о «невредности».
Ямба
Яко это: Наркотик, производимый из смолы растения каннабис. Имеет форму тёмных, плотного сложения брусков. Курится вследствие сигареты чи особенные устройства.
Кто употребляет: Эти же, кто такой использует марихуану — подростки, студенты, иногда более совершеннолетние потребители, склонные для «релаксу» и еще изменению восприятия.
Трава
Яко это: Высушенные листья а также цветы растения каннабис. Употребляется путем курения, пореже — в течение еде. Вызывает успокоение, изменённое восприятие а также эйфорию.
Кто такой употребляет: Шибко широченный круг — через школьников ут взрослых. НА некоторых краях легализована, что действует сверху восприятие её яко «загоришься», экстренно язык молодёжи.
Lino Janssen says:
Кокаин
Яко этто: Сильнодействующий электростимулятор основной сердитой системы. Доставляет собою белый цинаш, почаще всего вдыхается чрез нос. Быстро провоцирует привыкание.
Кто такой применяет: Обычно — молодые люди 20–40 полет, в течение том количестве изо безбедных слоёв слоя, через слово — для «тусовок», увеличения энергии, уверенности и еще работоспособности.
Мефедрон
Что этто: Химический наркотик, производное амфетамина. Обладает возбуждающим и психодислептическим эффектом. Распространён в течение виде порошка или таблеток.
Кто такой применяет: Школьники (а) также молодежь, почаще на пирушках, рейвах да в клубах. Экстренно известен в мире этих, кто такой отыскивает «новые ощущения» чи юркий кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения каннабис (марихуаны), держащих рослую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — молодые да юные люди, яко правило, на компании. Распространены из-за сравнительной доступности (а) также домысла о «безвредности».
Ямба
Что это: Наркотик, штампуемый из надоедалы растения каннабис. Имеет форму тёмных, густых брусков. Попыхивается после табак или специальные устройства.
Кто такой применяет: Эти ну, кто утилизирует марихуану — школьники, студенты, эпизодично более старшие потребители, склонные для «релаксу» а также изменению восприятия.
Марихуана
Что это: Высушенные листья и цветы растения каннабис. Употребляется путём курения, реже — в еде. Побуждает расслабление, изменённое цветовосприятие и эйфорию.
Кто такой употребляет: Шибко широкий круг — от школьников до взрослых. В ТЕЧЕНИЕ некоторых странах легализована, яко оказывает большое влияние на восприятие ее яко «загоришься», экстренно у молодёжи.
https://man-up.ru/ says:
когда имеется шанс, стоит примерить олимпийку перед покупкой, https://man-up.ru/ чтобы убедиться в правильности размера.
Calvin Velasco says:
Кокаин
Что этто: Сильнодействующий стимулятор стержневой нервическою системы. Представляет собой белый порошок, почаще всего вдыхается через нос. Я мухой побуждает привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 полет, на этом части из безбедных слоёв слоя, часто — для «вечеринок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Яко этто: Синтетический эфир, дериват амфетамина. Владеет ускоряющим и психодислептическим эффектом. Распространён в пейзаже порошка чи таблеток.
Кто такой применяет: Дети а также молодёжь, чаще на гулянках, рейвах да в течение клубах. Особенно востребован в среде тех, кто такой отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения каннабис (марихуаны), содержащих высокую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — молодые да юные штаты, яко правило, в течение компании. Разблаговещены ради сравнительной доступности (а) также домысла о «безопасности».
Ямба
Что это: Эфир, производимый изо смолы растения каннабис. Иметь в распоряжении форму тёмных, плотного сложения брусков. Попыхивается после табак чи особенные устройства.
Кто такой применяет: Эти же, кто такой использует марихуану — подростки, учащиеся, эпизодично более старшие потребители, расположенные ко «релаксу» да изменению восприятия.
Марихуана
Что это: Высушенные листья а также цветочки растения каннабис. Применяется путём курения, пореже — на еде. Поднимает успокоение, изменённое цветовосприятие равно эйфорию.
Кто такой применяет: Очень широченный круг — от школьников ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, что действует на восприятие ее как «безобидной», экстренно у молодёжи.
Jolie Buckingham says:
Снежок
Что это: Сильный стимулятор стержневой нервической системы. Исполнять роль собой ярый цинаш, почаще всего вдыхается через нос. Я мухой возбуждает привыкание.
Кто употребляет: Обычно — молодые штаты 20–40 лет, в течение том числе изо безбедных миров окружения, через слово — для «тусовок», подъема энергии, уверенности и работоспособности.
Мефедрон
Что это: Синтетический наркотик, дериват амфетамина. Иметь в своем распоряжении стимулирующим равным образом галлюциногенным эффектом. Распространён в течение виде порошка или таблеток.
Кто употребляет: Молодые люди равным образом молодежь, чаще на вечеринках, рейвах да на клубах. Особенно востребован на среде этих, кто отыскивает «новоиспеченные чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), охватывающих высокую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые люди также молодые штаты, яко шест, на компании. Разблаговещены из-за относительной доступности (а) также мифа что касается «безопасности».
Гашиш
Что это: Эфир, штампуемый с смолы растения каннабис. Быть владельцем фигуру тёмных, густых брусков. Курится через сигареты или специализированные устройства.
Кто применяет: Эти ну, кто утилизирует марихуану — подростки, студенты, эпизодично более совершеннолетные потребители, склонные для «релаксу» а также изменению восприятия.
Марихуана
Что этто: Подсушенные хряпа и еще цветы растения каннабис. Применяется путём курения, реже — в еде. Вызывает успокоение, изменённое восприятие а также эйфорию.
Кто употребляет: Очень широченный круг — от школьников ут взрослых. В ТЕЧЕНИЕ отдельных странах легализована, что воздействует сверху цветовосприятие её яко «безопасной», особенно язык молодёжи.
Bettina Luttrell says:
Кокаин
Яко это: Забористый электростимулятор основной сердитой системы. Рисует собою ярый порошок, чаще всего вдыхается чрез нос. Я мухой побуждает привыкание.
Кто такой употребляет: Элементарно — юные штаты 20–40 лет, в течение том количестве изо гарантированных слоёв окружения, через слово — чтобы «вечеринок», повышения энергии, убежденности да работоспособности.
Мефедрон
Яко это: Химический наркотик, происхождение амфетамина. Владеет возбуждающим да психодислептическим эффектом. Распространён на виде порошка чи таблеток.
Кто такой применяет: Подростки равным образом молодёжь, почаще на вечеринках, рейвах также в клубах. Экстренно моден в мире этих, кто ищет «новые ощущения» или быстрый кайф.
Бошки
Что это: Разговорное этноним элит соцветий растения каннабис (марихуаны), сохраняющих высокую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — молодые люди да молодые люди, яко правило, в течение компании. Распространены за условной доступности (а) также мифа что касается «безопасности».
Гашиш
Что этто: Наркотик, штампуемый изо надоедалы растения каннабис. Обладает фигуру тёмных, густых брусков. Курится сквозь табак или специальные устройства.
Кто применяет: Те же, кто использует марихуану — подростки, учащиеся, иногда более старшие покупатели, расположенные для «релаксу» и еще изменению восприятия.
Трава
Яко это: Высушенные листья а также цветы растения каннабис. Употребляется путем курения, пореже — в течение еде. Поднимает расслабление, изменённое восприятие равно эйфорию.
Кто такой употребляет: Очень широченный круг — от школьников до взрослых. В отдельных странах легализована, что воздействует сверху цветовосприятие её яко «загоришься», особенно язык молодёжи.
купить бошки says:
Кокаин
Что этто: Забористый электростимулятор центральной сердитой системы.
Доставляет собой ярый порошок, почаще честь имею кланяться вдыхается через нос.
Я мухой возбуждает привыкание.
Кто употребляет: Обычно
— молодые штаты 20–40 лет, на том
числе из обеспеченных пластов союзы, через слово — чтобы «вечеринок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Что этто: Химический эфир, производное
амфетамина. Иметь в своем распоряжении стимулирующим и
психодислептическим эффектом.
Распространён в варианте порошка
или таблеток.
Кто такой употребляет:
Школьники а также молодежь,
чаще сверху пирушках, рейвах и еще в течение клубах.
Особенно моден на сфере тех, кто такой ищет «последние ощущения» чи быстрый кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения каннабис (марихуаны), держащих высокую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего —
подростки и юные штаты, яко правило, в течение компании.
Распространены из-за условной доступности да домысла что касается «безопасности».
Гашиш
Что это: Эфир, производимый изо надоедалы растения каннабис.
Иметь в распоряжении форму тёмных,
плотных брусков. Попыхивается сквозь табак
или спец. устройства.
Кто такой употребляет: Эти же,
кто такой использует марихуану —
подростки, учащиеся, иногда сильнее старшие потребители,
склонные для «релаксу» а также изменению восприятия.
Трава
Яко этто: Высушенные листья равным образом цветы растения каннабис.
Употребляется путем курения, реже — на еде.
Побуждает успокоение, изменённое восприятие равно эйфорию.
Кто такой употребляет: Шибко широкий эклиптика — от школьников ут взрослых.
НА отдельных сторонах легализована, что воздействует сверху восприятие её как «безобидной»,
особенно у молодёжи.
Selina Seward says:
Кокаин
Что этто: Забористый стимулятор стержневой нервической системы. Рисует собою ярый цинаш, почаще честь имею кланяться вдыхается чрез нос. Быстро вызывает привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 полет, в течение этом части из снабженных миров окружения, через слово — для «тусовок», подъема энергии, уверенности а также работоспособности.
Мефедрон
Яко это: Химический наркотик, выводное амфетамина. Иметь в своем распоряжении возбуждающим да галлюциногенным эффектом. Распространён в течение пейзаже порошка или таблеток.
Кто применяет: Подростки (а) также молодёжь, почаще сверху вечеринках, рейвах и в течение клубах. Экстренно востребован на среде этих, кто такой ищет «новые чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное название макушек соцветий растения каннабис (марихуаны), содержащих высокую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — подростки и еще юные люди, как шест, в компании. Разблаговещены за относительной доступности равно домысла что касается «безопасности».
Ямба
Яко этто: Эфир, штампуемый с смолы растения каннабис. Имеет форму тёмных, коренастых брусков. Попыхивается сквозь сигареты или специализированные устройства.
Кто применяет: Те же, кто использует марихуану — подростки, студенты, эпизодично сильнее взрослые потребители, склонные к «релаксу» и изменению восприятия.
Трава
Яко это: Подсушенные хряпа и цветы растения каннабис. Применяется путем курения, пореже — в течение еде. Побуждает успокоение, изменённое восприятие и еще эйфорию.
Кто такой употребляет: Шибко широченный круг — через подростков до взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, яко влияет на цветовосприятие ее как «загоришься», экстренно язык молодёжи.
Oliver Silva says:
Снежок
Яко это: Сильнодействующий стимулятор стержневой нервическою системы. Доставляет собою белый порошок, почаще честь имею кланяться вдыхается посредством нос. Я мухой провоцирует привыкание.
Кто применяет: Элементарно — юные люди 20–40 полет, в течение этом части с снабженных пластов общества, через слово — для «вечеринок», подъема энергии, уверенности и еще работоспособности.
Мефедрон
Яко это: Химический эфир, выводное амфетамина. Имеет возбуждающим да психодислептическим эффектом. Распространён в виде порошка или таблеток.
Кто такой употребляет: Подростки и молодёжь, чаще на вечеринках, рейвах и еще в клубах. Экстренно популярен в сфере этих, кто такой отыскивает «новые чувства» чи юркий кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), охватывающих рослую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — подростки и молодые люди, яко шест, в течение компании. Излиты в связи условной доступности и мифа что касается «безопасности».
Ямба
Яко этто: Наркотик, штампуемый изо надоедалы растения каннабис. Быть владельцем фигуру тёмных, коренастых брусков. Курится вследствие табак чи особенные устройства.
Кто применяет: Эти ну, кто такой утилизирует марихуану — подростки, студенты, эпизодично сильнее совершеннолетние покупатели, склонные к «релаксу» да изменению восприятия.
Трава
Яко это: Высушенные листья и цветы растения каннабис. Употребляется путем курения, пореже — на еде. Побуждает расслабление, изменённое восприятие равно эйфорию.
Кто такой употребляет: Очень широченный круг — через подростков до взрослых. НА отдельных сторонах легализована, что влияет сверху восприятие ее как «загоришься», экстренно у молодёжи.
Marylyn Rolph says:
Кокаин
Яко этто: Сильнодействующий стимулятор стержневой нервической системы. Исполнять роль собою белый порошок, чаще всего вдыхается через нос. Я мухой вызывает привыкание.
Кто такой применяет: Обычно — юные штаты 20–40 полет, в этом количестве изо снабженных миров союзы, часто — чтобы «вечеринок», увеличения энергии, убежденности а также работоспособности.
Мефедрон
Яко этто: Химический наркотик, происхождение амфетамина. Обладает инициирующим равно психодислептическим эффектом. Распространён на пейзаже порошка или таблеток.
Кто употребляет: Молодые люди (а) также молодёжь, почаще на тусовках, рейвах да в течение клубах. Экстренно моден в слою тех, кто отыскивает «новые чувства» или быстрый кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), держащих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — молодые и молодые штаты, как шест, в течение компании. Разблаговещены в связи сравнительной доступности (а) также мифа о «безвредности».
Ямба
Что этто: Наркотик, штампуемый изо смолы растения каннабис. Иметь в распоряжении фигуру тёмных, плотного сложения брусков. Курится вследствие сигареты чи специализированные устройства.
Кто такой применяет: Эти ну, кто использует марихуану — подростки, студенты, иногда сильнее взрослые покупатели, склонные к «релаксу» и еще изменению восприятия.
Марихуана
Что этто: Высушенные листья равным образом цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Поднимает успокоение, изменённое восприятие а также эйфорию.
Кто применяет: Очень широченный эклиптика — через подростков до взрослых. В некоторых сторонах легализована, что действует сверху цветовосприятие ее как «безобидной», особенно у молодёжи.
http://jenclub.ru/ says:
Главное – использовать спелый http://jenclub.ru/ и вкусный плод. данный ингредиент вводят в десерты, соусы и мясные блюда.
https://www.nano-ions.com/heres-all-the-fashion-news-you-missed-this-week/ says:
отдайте предпочтение платформам с немедленным пополнением и без необходимости комиссий.
Here is my web blog; https://www.nano-ions.com/heres-all-the-fashion-news-you-missed-this-week/
https://www.specoze.pl/2025/06/20/1xbet-pc-download-5/ says:
Here is my blog post; https://www.specoze.pl/2025/06/20/1xbet-pc-download-5/
Giselle Prowse says:
Do you have a spam issue on this website; I also am a blogger, and I was wanting to know your situation; we have developed some nice practices and we are looking to trade techniques with other folks, why not shoot me an email if interested.
http://karolinashop.ru says:
Расплатиться можно какой угодно картой.
Here is my web site; http://karolinashop.ru/
BADGES-UK QUALITY says:
Appreciation to my father who told me about this website, this weblog is genuinely remarkable.
Also visit my website: BADGES-UK QUALITY
Margarito Plumb says:
Remarkable things here. I am very satisfied to look your article. Thank you a lot and I am taking a look forward to touch you. Will you please drop me a mail?
http://shikoshop.ru/ says:
В вещах фабричного производства женской гардероба elny невозможно выглядеть неуместно, большинство их них универсальны – всегда кстати,.
Here is my site – http://shikoshop.ru/
https://nomadmagic.kz/ says:
надежность и оперативность совершения финансовых операций – важный элемент. свою признательность можно выразить по-своему.
Also visit my blog post https://nomadmagic.kz/
http://www.zimakids.ru says:
ключевое принцип цветочного магазина – протянуть руку помощи посетителю сделать http://www.zimakids.ru// бизнес прибыльным!
https://t-service24.ru/ says:
наш сервисный центр в Красноярске предлагает наиболее выгодные предложения сотрудничества и стоимость https://t-service24.ru/ для вас.
купить кокаин says:
Кокаин
Что это: Сильнодействующий стимулятор стержневой нервической системы.
Доставляет собой ярый цинаш, чаще честь имею кланяться вдыхается
через нос. Быстро провоцирует привыкание.
Кто применяет: Элементарно — юные штаты 20–40 полет, в течение этом части из гарантированных слоёв
окружения, через слово — чтобы «тусовок», подъема энергии, уверенности и еще работоспособности.
Мефедрон
Яко этто: Химический эфир,
выводное амфетамина. Иметь в своем распоряжении ускоряющим да галлюциногенным эффектом.
Распространён в течение пейзаже порошка чи таблеток.
Кто такой применяет: Школьники а также молодёжь,
чаще сверху гулянках, рейвах и на клубах.
Экстренно востребован в течение среде тех, кто ищет «новоиспеченные ощущения» или быстрый кайф.
Бошки
Что это: Разговорное название макушек соцветий растения каннабис (марихуаны), сохраняющих высокую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — молодые и
молодые люди, как правило,
в течение компании. Излиты ради сравнительной доступности равно мифа о «невредности».
Ямба
Яко этто: Эфир, производимый с смолы растения
каннабис. Имеет форму тёмных, плотных брусков.
Попыхивается после табак или специальные устройства.
Кто применяет: Те ну, кто такой утилизирует
марихуану — подростки, студенты, эпизодично сильнее совершеннолетные потребители, склонные
ко «релаксу» да изменению восприятия.
Трава
Яко этто: Высушенные листья а также цветы растения каннабис.
Применяется путем курения, реже — в течение еде.
Инициирует расслабление, изменённое восприятие и еще эйфорию.
Кто применяет: Шибко широченный
эклиптика — через школьников ут взрослых.
В ТЕЧЕНИЕ отдельных государствах легализована, яко
оказывает большое влияние на
цветовосприятие её как «неопасной», особенно язык молодёжи.
Osvaldo Tuckfield says:
Снежок
Что это: Сильнодействующий стимулятор стержневой нервной системы. Доставляет собою ярый порошок, чаще честь имею кланяться вдыхается через нос. Я мухой вызывает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 лет, в течение этом количестве изо снабженных слоёв союзы, через слово — чтобы «вечеринок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Яко это: Синтетический эфир, производное амфетамина. Владеет возбуждающим и галлюциногенным эффектом. Распространён в течение варианте порошка или таблеток.
Кто употребляет: Молодые люди равным образом молодежь, чаще сверху пирушках, рейвах и еще в течение клубах. Экстренно известен в сфере этих, кто ищет «новые ощущения» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), сохраняющих рослую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые да молодые люди, как правило, на компании. Испущены из-за сравнительной доступности (а) также мифа что касается «безопасности».
Ямба
Что этто: Наркотик, штампуемый изо смолы растения каннабис. Быть владельцем фигуру тёмных, плотных брусков. Курится через сигареты чи особенные устройства.
Кто такой употребляет: Эти ну, кто такой утилизирует марихуану — подростки, студенты, иногда более старшие потребители, склонные для «релаксу» да изменению восприятия.
Марихуана
Яко этто: Подсушенные хряпа равным образом цветочки растения каннабис. Применяется путем курения, пореже — на еде. Побуждает расслабление, изменённое цветовосприятие равно эйфорию.
Кто такой применяет: Шибко широченный круг — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных краях легализована, что воздействует сверху цветовосприятие её как «загоришься», особенно язык молодёжи.
Graciela Raynor says:
Снежок
Что это: Сильнодействующий электростимулятор основной нервной системы. Исполнять роль собой белый порошок, чаще честь имею кланяться вдыхается через нос. Быстро провоцирует привыкание.
Кто употребляет: Обычно — молодые люди 20–40 полет, в том части изо безбедных миров окружения, часто — чтобы «тусовок», повышения энергии, уверенности да работоспособности.
Мефедрон
Что этто: Синтетический эфир, выводное амфетамина. Имеет инициирующим да галлюциногенным эффектом. Распространён на наружности порошка или таблеток.
Кто применяет: Школьники равным образом молодёжь, чаще сверху вечеринках, рейвах также в течение клубах. Особенно популярен на мире тех, кто отыскивает «последние ощущения» или быстрый кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения каннабис (марихуаны), охватывающих высокую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — молодые да юные штаты, яко правило, в компании. Распространены ради относительной доступности равно домысла что касается «невредности».
Гашиш
Яко этто: Эфир, штампуемый из надоедалы растения каннабис. Быть владельцем фигуру тёмных, плотного сложения брусков. Попыхивается через табак чи специализированные устройства.
Кто такой применяет: Те ну, кто такой использует марихуану — подростки, учащиеся, иногда более взрослые покупатели, склонные буква «релаксу» и изменению восприятия.
Марихуана
Яко это: Подсушенные листья а также цветочки растения каннабис. Применяется путём курения, реже — на еде. Побуждает успокоение, изменённое цветовосприятие и еще эйфорию.
Кто применяет: Очень широкий круг — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, яко оказывает большое влияние на цветовосприятие её яко «неопасной», особенно язык молодёжи.
Erlinda Valasquez says:
Кокаин
Яко это: Сильный стимулятор центральной нервической системы. Рисует собою белый цинаш, чаще честь имею кланяться вдыхается чрез нос. Я мухой возбуждает привыкание.
Кто применяет: Элементарно — юные люди 20–40 лет, на этом части из снабженных пластов слоя, через слово — для «тусовок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Химический наркотик, производное амфетамина. Владеет стимулирующим равным образом психодислептическим эффектом. Распространён на наружности порошка чи таблеток.
Кто такой применяет: Школьники (а) также молодежь, почаще на вечеринках, рейвах да в течение клубах. Особенно известен в течение мире тех, кто такой ищет «новые ощущения» или быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения каннабис (марихуаны), охватывающих высокую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — подростки да молодые люди, как шест, в компании. Распространены ради сравнительной доступности (а) также мифа что касается «невредности».
Ямба
Яко этто: Наркотик, производимый с смолы растения каннабис. Имеет фигуру тёмных, плотных брусков. Попыхивается сквозь табак или особенные устройства.
Кто такой употребляет: Эти ну, кто использует марихуану — школьники, студенты, иногда более совершеннолетние покупатели, расположенные буква «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Высушенные хряпа и еще цветы растения каннабис. Употребляется путем курения, пореже — на еде. Вызывает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто применяет: Очень широкий эклиптика — через школьников ут взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, что воздействует сверху цветовосприятие её как «безобидной», особенно язык молодёжи.
Tessa Cardin says:
Кокаин
Что это: Сильнодействующий стимулятор стержневой нервической системы. Рисует собою белый порошок, чаще всего вдыхается чрез нос. Быстро провоцирует привыкание.
Кто применяет: Обычно — молодые люди 20–40 лет, на том числе из снабженных пластов союзы, через слово — чтобы «тусовок», увеличения энергии, убежденности да работоспособности.
Мефедрон
Что это: Химический наркотик, выводное амфетамина. Иметь в своем распоряжении возбуждающим равным образом психодислептическим эффектом. Распространён в виде порошка или таблеток.
Кто употребляет: Школьники равным образом молодежь, почаще на гулянках, рейвах и еще в клубах. Экстренно моден на среде этих, кто отыскивает «новые чувства» или юркий кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), сохраняющих рослую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — молодые люди также молодые люди, яко шест, в течение компании. Излиты из-за условной доступности да мифа о «безвредности».
Ямба
Яко это: Эфир, штампуемый из смолы растения каннабис. Обладает фигуру тёмных, плотных брусков. Попыхивается через сигареты или специальные устройства.
Кто употребляет: Те же, кто такой использует марихуану — подростки, студенты, эпизодично сильнее старшие потребители, расположенные ко «релаксу» и еще изменению восприятия.
Трава
Что это: Высушенные листья и цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Инициирует успокоение, изменённое восприятие равно эйфорию.
Кто такой применяет: Очень широченный эклиптика — через школьников до взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, что действует сверху восприятие её как «безобидной», особенно язык молодёжи.
partycasino bonus code 10€ says:
como la humanidad ya hemos visto, todos Internet casa de juego tienen propios personales campañas y todos tienen serie requisitos, en particular, en línea-http://party-casino-online.com/ pueden: acreditar inicial depósito por una cantidad.
Nicole Holub says:
you are really a just right webmaster. The site loading pace is amazing. It seems that you’re doing any distinctive trick. In addition, The contents are masterwork. you’ve done a fantastic task in this matter!
Max Woore says:
Hello, the whole thing is going nicely here and ofcourse every one is sharing data, that’s truly good, keep up writing.
winnita7.com says:
quando tu necessario scegli un casinò, indipendentemente da questo, diventerà se è online o fisico, https://https://winnita7.com// può essere chiamato row cause che influenzano e influenzano decisione/ analisi giocatori.
http://delo-mebeli.ru/ says:
Торгово-промышленная компания http://delo-mebeli.ru/ занимается мебели под запрос по персональным параметрам.
http://ecmclub.ru/ says:
а то и самого святого http://ecmclub.ru/ – дизайна. 2.
Mohamed Tinsley says:
Sweet blog! I found it while searching on Yahoo News. Do you have any suggestions on how to get listed in Yahoo News? I’ve been trying for a while but I never seem to get there! Appreciate it
https://podster.fm/users/354874/playlists/896 says:
4) если ты стал очевидцем несчастного случая, поставь скрещенные лыжи или палки выше пострадавшего, чтобы предупредить других лыжников.
My blog post: https://podster.fm/users/354874/playlists/896
http://fit-lady.ru/ says:
для себя выбрала strech, http://fit-lady.ru/ стараюсь также “постоянно посещать.
https://www.sr.npu.edu.ua/?p=241478 says:
MOBILE l’applicazione è un programma offline, allora devi raccogli sul tuo computer e trascorri il tempo libero, https://www.sr.npu.edu.ua/?p=241478 Qualunque Qualità connessione a Internet.
https://awardmattress.com/page-217/ says:
{많은/많은 사람들/많은 사람들/대부분의 사람들/일부}{내기/내기/내기}{승리/잭팟을 얻기 위해 무차별 적으로},{어느/어느} https://awardmattress.com/page-217/ {만든다/제공}큰상금.
https://parabet-guncel-giris.info/ says:
poker içindeki sıradan oyun katılımcıları stratejilerini doğru bir şekilde analiz ettikten sonra, https://parabet-guncel-giris.info/ önemli ölçüde kendi seviyenizi ustalığınızı artırabilir.
туалетная вода says:
и, если мы говорим про лучшие женские http://carnerbars.ru/ 2025 года, то упомянутый флер точно соответствует запросу: трендовые пион и черную.
1390 says:
також нерідко від енергійної експлуатації виходить з ладу ручка для відкривання https://spilkuvannya.webboard.org//post1390.html#https://spilkuvannya.webboard.org//post1390.html стулка.
https://TreatmentCostStemCell.com says:
The duration of hospitalization can range from different weeks to several months and is directly proportional to the https://TreatmentCostStemCell.com//.
Mona Turgeon says:
Hey! Someone in my Myspace group shared this site with us so I came to take a look. I’m definitely enjoying the information. I’m book-marking and will be tweeting this to my followers! Excellent blog and fantastic design and style.
Maribel Clift says:
Hi! I just want to offer you a huge thumbs up for your great info you have here on this post. I will be coming back to your website for more soon.
Rosalind Cookson says:
No matter if some one searches for his necessary thing, so he/she wants to be available that in detail, thus that thing is maintained over here.
https://StemCellPriceInfo.com/ says:
if violations are detected near the first 20 karyotypes, https://StemCellPriceInfo.com/ analysis must/must be repeated on a fresh sample.
Audra Chance says:
always i used to read smaller articles or reviews which as well clear their motive, and that is also happening with this paragraph which I am reading at this time.
Williemae Donato says:
Консультация по правовым направлениям подразумевает доверительное
отношение между покупателем и https://frostrealty.ru/ специалистом.
духи says:
Продукция Ралле пользовалась популярностью: фабрика стала «Торговым домом https://mancera2.ru/ А.
Rashad Spooner says:
It is not my first time to pay a visit this web page, i am browsing this web page dailly and obtain nice data from here daily.
https://1-italy.ru/ says:
в данном материале собрали подборку
автомобильных перелётов по Италии, которые дадут возможность
погрузиться в атмосферу
страны,.
Also visit my blog https://1-italy.ru/
https://www.rptor.pl/streamlining-your-business-with-xero-accounts/ says:
according to laws such as the California Consumer Protection Act (CCPA), the California Privacy Act (CPRA), and the Generalin general} the EU Regulation on information security (GDPR), for you available certain rights regarding your personal.
Also visit my website :: https://www.rptor.pl/streamlining-your-business-with-xero-accounts/
Lilian Greenfield says:
Hello! This is my first comment here so I just wanted to give a quick shout out and say I really enjoy reading your blog posts. Can you suggest any other blogs/websites/forums that deal with the same topics? Appreciate it!
Evan Marr says:
This blog was… how do I say it? Relevant!! Finally I’ve found something that helped me. Thank you!
Corazon Schumacher says:
Thanks for finally writing about >ROS從”零”開始 – 4. ROSSerial_Arduino測試 (RC servo運轉, 示範subscriber) <Loved it!
https://StemCellCostSpain.com/ says:
Beckmann, Julia; Shaitza, Sebastian; Werneth, Peter; Fischer, Johannes K.; Gibel, Bernd “https://StemCellCostSpain.com/” (June 15, 2007).
https://winwin-zerkal0.top/ says:
В мобильного варианта и приложении предусмотрена интеллектуально спланированная навигация по рынкам ВинВин ставок.
Also visit my homepage https://winwin-zerkal0.top/
Jennifer Couture says:
It’s amazing designed for me to have a website, which is valuable for my knowledge. thanks admin
https://multifamilymonopoly.com/scopri-il-fascino-del-gioco-con-il-winnita-slot/ says:
Questa variabilità nel tempo di elaborazione diventa ulteriore complicazione fattore per Fan. Importi superiori a €6500 possono richiedere fino a https://multifamilymonopoly.com/scopri-il-fascino-del-gioco-con-il-winnita-slot/ dopo 14 giorni.
https://StemCellHelpAutism.com says:
The regenerative potential of stem cells spans the embryonic, adult, induced pluripotency, and perinatal stages, offering unprecedented therapeutic opportunities in cancer, neurodegenerative disorders, cardiovascular diseases, spinal cord injuries,.
Visit my homepage :: https://StemCellHelpAutism.com/
https://shop.classweb.ir/2025/06/26/scopri-il-mondo-del-winnita-casino-23/ says:
fornire informazioni dettagliate Dettagli sulle attività sospette in modo che tu possano indagare e accettare/ intraprendere manipolazioni per protezione https://shop.classweb.ir/2025/06/26/scopri-il-mondo-del-winnita-casino-23/ saldo.
https://www.empowerexercise.com/entdecken-sie-die-vorteile-des-legiano-cashback/ says:
Wenn du ein Bronze-Gewinner wirst, erhältst du 20 kostenlose unbezahlte Spins pro Woche|Woche|Woche}, von denen jederWert ist|basiert|basiert|basiert|basiert} 0,10 euro pro Woche Woche/Woche/Woche Wert/Wert/Wert/Wert/Wert/Wert/Wert/Wert/Wert 0,10.
Feel free to surf to my site https://www.empowerexercise.com/entdecken-sie-die-vorteile-des-legiano-cashback/
https://winwinkasino.top says:
помещения с одной и скучной игрой отличаются оформлением, ВинВин зеркало диапазонами пари и темпом.
Also visit my page https://winwinkasino.top/
https://preeticounsellinghub.com/ringiovanimento-della-pelle-scopri-la-tua-clinica/ says:
toda tako da ti vsadki ohranijo svojo funkcionalnost in lepo in estetsko videz.
Also visit my blog post – https://preeticounsellinghub.com/ringiovanimento-della-pelle-scopri-la-tua-clinica/
Parabet says:
açılış sayfası her iki taraf için kafa karışıklığı yaratabilir/yapabilir}. Fark sadece/sadece bir harftir. google, https://khan-bet.info/ sıklıkla benzer yazımlara sahip kelimeleri bir ve bu olarak edinebilir.
https://workqredits.com/?p=8159 says:
Accesso a Sito Primo, https://workqredits.com/?p=8159 visita Sito winnita Casino e trova tasto «Registrati ora”.
alatyir.mosmart.ru says:
центральное преимущество – предоставление максимально возможного числа услуг в процессе «одного окна» при снижении количества.
my blog post; http://alatyir.mosmart.ru/
Parabet says:
her şeyden önce, gerekli not etmek site adresinin süreci /inşası değişiklikleri /modifikasyonları olduğunu gider çok hızlı /hızlı yöntemle.
my web blog; https://khanbet.info/
https://aptos-uplands.freeforums.net/thread/485/where-find-fun-hobby-kits says:
discover for personal use 60 simple options for https://aptos-uplands.freeforums.net/thread/485/where-find-fun-hobby-kits with your own hands in home conditions.
Lanora Dovey says:
Кокаин
Яко этто: Сильнодействующий электростимулятор центральной нервической системы. Представляет собою ярый порошок, чаще честь имею кланяться вдыхается через нос. Я мухой побуждает привыкание.
Кто применяет: Элементарно — молодые штаты 20–40 полет, в течение том числе с гарантированных миров союзы, через слово — для «вечеринок», повышения энергии, убежденности да работоспособности.
Мефедрон
Яко это: Химический наркотик, выводное амфетамина. Иметь в своем распоряжении инициирующим да галлюциногенным эффектом. Распространён в варианте порошка чи таблеток.
Кто такой применяет: Подростки (а) также молодежь, чаще на пирушках, рейвах и в течение клубах. Особенно известен в течение среде тех, кто такой ищет «новые чувства» или быстрый кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), охватывающих рослую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — молодые да юные штаты, яко шест, в течение компании. Испущены из-за условной доступности равно домысла что касается «безопасности».
Ямба
Яко этто: Эфир, штампуемый изо смолы растения каннабис. Обладает форму тёмных, плотных брусков. Курится после табак или специальные устройства.
Кто употребляет: Эти же, кто такой использует марихуану — подростки, студенты, иногда сильнее совершеннолетние потребители, расположенные буква «релаксу» а также изменению восприятия.
Марихуана
Что это: Подсушенные листья и цветы растения каннабис. Применяется путём курения, реже — в течение еде. Побуждает расслабление, изменённое восприятие и эйфорию.
Кто такой применяет: Шибко широченный круг — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных странах легализована, что оказывает большое влияние сверху цветовосприятие ее яко «безопасной», экстренно у молодёжи.
Kristie Kinslow says:
Снежок
Яко это: Сильный стимулятор основной нервной системы. Представляет собою ярый цинаш, чаще всего вдыхается через нос. Я мухой возбуждает привыкание.
Кто применяет: Элементарно — юные люди 20–40 лет, в течение этом количестве изо снабженных миров слоя, через слово — для «тусовок», повышения энергии, убежденности да работоспособности.
Мефедрон
Яко это: Синтетический эфир, дериват амфетамина. Имеет возбуждающим и психодислептическим эффектом. Распространён на виде порошка или таблеток.
Кто такой применяет: Молодые люди а также молодежь, чаще сверху гулянках, рейвах и в течение клубах. Экстренно моден в течение сфере тех, кто такой ищет «последние ощущения» чи юркий кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения наркотик (марихуаны), сохраняющих высокую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — молодые также молодые штаты, как правило, на компании. Разблаговещены ради условной доступности да мифа что касается «невредности».
Ямба
Яко это: Эфир, производимый изо надоедалы растения каннабис. Быть владельцем форму тёмных, коренастых брусков. Попыхивается после табак чи особенные устройства.
Кто употребляет: Те ну, кто такой утилизирует марихуану — школьники, учащиеся вузов, иногда более взрослые потребители, расположенные ко «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Высушенные листья равным образом цветы растения каннабис. Употребляется путём курения, реже — в еде. Побуждает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто употребляет: Шибко широченный эклиптика — через школьников до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, что действует сверху цветовосприятие ее как «загоришься», экстренно у молодёжи.
Tiffiny Pierson says:
Снежок
Яко это: Сильный электростимулятор основной нервной системы. Рисует собою ярый порошок, чаще всего вдыхается чрез нос. Быстро возбуждает привыкание.
Кто применяет: Элементарно — молодые штаты 20–40 полет, в этом количестве изо гарантированных слоёв общества, часто — для «тусовок», повышения энергии, уверенности и еще работоспособности.
Мефедрон
Яко это: Синтетический наркотик, выводное амфетамина. Владеет стимулирующим равно галлюциногенным эффектом. Распространён в пейзаже порошка чи таблеток.
Кто такой применяет: Подростки и молодежь, чаще на тусовках, рейвах и в клубах. Экстренно востребован в мире тех, кто такой ищет «новоиспеченные чувства» чи юркий кайф.
Бошки
Яко этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), охватывающих рослую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — подростки да юные штаты, яко правило, в течение компании. Разблаговещены за условной доступности (а) также домысла что касается «невредности».
Гашиш
Яко этто: Эфир, производимый из смолы растения каннабис. Иметь в распоряжении фигуру тёмных, плотных брусков. Попыхивается после табак чи особенные устройства.
Кто применяет: Те ну, кто использует марихуану — подростки, учащиеся, иногда сильнее старшие потребители, склонные для «релаксу» и изменению восприятия.
Марихуана
Яко это: Высушенные листья и цветочки растения каннабис. Применяется путем курения, реже — на еде. Поднимает расслабление, изменённое цветовосприятие а также эйфорию.
Кто употребляет: Очень широкий эклиптика — от школьников ут взрослых. НА некоторых государствах легализована, что влияет на восприятие её яко «загоришься», экстренно у молодёжи.
Phillipp Sylvester says:
Кокаин
Что это: Сильный электростимулятор центральной нервическою системы. Представляет собой белый порошок, почаще всего вдыхается посредством нос. Быстро вызывает привыкание.
Кто применяет: Обычно — молодые штаты 20–40 полет, в течение том части с безбедных миров слоя, часто — для «тусовок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Что это: Химический эфир, выводное амфетамина. Имеет стимулирующим да психодислептическим эффектом. Распространён в течение наружности порошка чи таблеток.
Кто употребляет: Молодые люди а также молодёжь, чаще на вечеринках, рейвах и в течение клубах. Особенно моден в течение сфере этих, кто такой ищет «новые чувства» или быстрый кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), содержащих рослую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — подростки и еще молодые люди, яко правило, в течение компании. Испущены за относительной доступности равно домысла что касается «безопасности».
Ямба
Что это: Наркотик, производимый из смолы растения каннабис. Иметь в распоряжении форму тёмных, плотных брусков. Курится сквозь табак или специализированные устройства.
Кто употребляет: Эти же, кто использует марихуану — школьники, студенты, эпизодично более совершеннолетные покупатели, расположенные для «релаксу» и еще изменению восприятия.
Трава
Яко этто: Подсушенные хряпа и еще цветочки растения каннабис. Употребляется путем курения, пореже — в течение еде. Вызывает расслабление, изменённое цветовосприятие и эйфорию.
Кто употребляет: Шибко широченный круг — от подростков до взрослых. В некоторых сторонах легализована, что действует сверху восприятие её яко «загоришься», экстренно у молодёжи.
Sheila Chew says:
Кокаин
Яко этто: Сильнодействующий электростимулятор центральной сердитой системы. Доставляет собой белый порошок, чаще всего вдыхается чрез нос. Быстро вызывает привыкание.
Кто применяет: Обычно — юные штаты 20–40 полет, в течение этом количестве изо безбедных миров союзы, часто — для «тусовок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Что этто: Химический наркотик, производное амфетамина. Иметь в своем распоряжении ускоряющим да психодислептическим эффектом. Распространён в течение наружности порошка или таблеток.
Кто применяет: Дети а также молодежь, почаще сверху вечеринках, рейвах и в клубах. Особенно известен в среде тех, кто такой ищет «новые чувства» чи юркий кайф.
Бошки
Яко это: Разговорное название элит соцветий растения каннабис (марихуаны), сохраняющих высокую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — дети также молодые штаты, яко шест, в течение компании. Испущены из-за условной доступности да мифа что касается «невредности».
Ямба
Что это: Эфир, производимый с надоедалы растения каннабис. Обладает фигуру тёмных, коренастых брусков. Попыхивается через табак чи специализированные устройства.
Кто применяет: Эти ну, кто использует марихуану — подростки, студенты, иногда более взрослые покупатели, склонные буква «релаксу» и еще изменению восприятия.
Трава
Яко это: Подсушенные хряпа а также цветы растения каннабис. Употребляется путем курения, пореже — на еде. Поднимает расслабление, изменённое цветовосприятие и эйфорию.
Кто употребляет: Шибко широченный круг — от подростков до взрослых. В некоторых сторонах легализована, яко влияет сверху восприятие ее яко «загоришься», экстренно у молодёжи.
Concepcion Hollar says:
Снежок
Что это: Сильный стимулятор стержневой нервической системы. Исполнять роль собой белый цинаш, чаще честь имею кланяться вдыхается после нос. Я мухой вызывает привыкание.
Кто такой употребляет: Элементарно — юные люди 20–40 лет, на этом числе изо гарантированных пластов окружения, часто — для «тусовок», подъема энергии, уверенности а также работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, происхождение амфетамина. Иметь в своем распоряжении ускоряющим равно галлюциногенным эффектом. Распространён в варианте порошка чи таблеток.
Кто такой употребляет: Дети и молодежь, почаще на тусовках, рейвах да в клубах. Экстренно моден в течение среде тех, кто ищет «новые ощущения» или быстрый кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), держащих высокую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — молодые люди да юные люди, как шест, в компании. Распространены из-за сравнительной доступности да мифа что касается «безвредности».
Гашиш
Что этто: Наркотик, производимый из смолы растения каннабис. Обладает форму тёмных, плотного сложения брусков. Курится вследствие сигареты чи специализированные устройства.
Кто такой применяет: Эти ну, кто использует марихуану — подростки, учащиеся, иногда сильнее взрослые потребители, склонные к «релаксу» и изменению восприятия.
Трава
Что этто: Подсушенные хряпа и еще цветы растения каннабис. Употребляется путем курения, пореже — в течение еде. Вызывает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто употребляет: Очень широченный эклиптика — через школьников ут взрослых. В отдельных странах легализована, что влияет сверху восприятие её как «загоришься», особенно у молодёжи.
Preston Gwendolen says:
Кокаин
Что это: Забористый стимулятор стержневой нервической системы. Рисует собой ярый порошок, почаще всего вдыхается посредством нос. Быстро вызывает привыкание.
Кто такой употребляет: Обычно — молодые штаты 20–40 полет, на этом части из снабженных миров слоя, часто — чтобы «вечеринок», увеличения энергии, уверенности и еще работоспособности.
Мефедрон
Что это: Синтетический наркотик, дериват амфетамина. Владеет ускоряющим равным образом галлюциногенным эффектом. Распространён на наружности порошка чи таблеток.
Кто употребляет: Подростки (а) также молодежь, почаще на тусовках, рейвах и в течение клубах. Особенно известен в слою тех, кто такой отыскивает «новоиспеченные чувства» или быстрый кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), охватывающих высокую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — дети и молодые штаты, как шест, в компании. Распространены в связи сравнительной доступности да домысла о «невредности».
Гашиш
Что это: Наркотик, штампуемый изо смолы растения каннабис. Обладает фигуру тёмных, коренастых брусков. Курится после табак или специальные устройства.
Кто такой употребляет: Эти ну, кто использует марихуану — подростки, учащиеся вузов, эпизодично более старшие потребители, расположенные к «релаксу» да изменению восприятия.
Марихуана
Яко это: Подсушенные листья равным образом цветочки растения каннабис. Употребляется путём курения, реже — на еде. Поднимает расслабление, изменённое цветовосприятие а также эйфорию.
Кто употребляет: Очень широченный круг — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, яко действует сверху цветовосприятие её как «безопасной», особенно язык молодёжи.
Coy Estrada says:
Снежок
Яко этто: Забористый стимулятор центральной нервной системы. Представляет собою ярый порошок, чаще всего вдыхается чрез нос. Быстро побуждает привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 лет, в течение том количестве с гарантированных пластов общества, часто — чтобы «вечеринок», увеличения энергии, убежденности а также работоспособности.
Мефедрон
Яко этто: Синтетический эфир, дериват амфетамина. Обладает ускоряющим равно психодислептическим эффектом. Распространён в течение виде порошка или таблеток.
Кто такой употребляет: Дети и молодежь, чаще на тусовках, рейвах и еще на клубах. Экстренно известен в течение слою тех, кто такой отыскивает «последние чувства» или быстрый кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), содержащих рослую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — дети да молодые штаты, как шест, в компании. Испущены из-за относительной доступности равно мифа что касается «безвредности».
Гашиш
Яко это: Эфир, штампуемый из смолы растения каннабис. Иметь в распоряжении форму тёмных, плотных брусков. Курится через табак чи специальные устройства.
Кто употребляет: Те же, кто утилизирует марихуану — школьники, студенты, эпизодично сильнее совершеннолетние покупатели, расположенные к «релаксу» да изменению восприятия.
Марихуана
Яко этто: Подсушенные листья и цветочки растения каннабис. Применяется путем курения, реже — в течение еде. Вызывает расслабление, изменённое цветовосприятие равно эйфорию.
Кто такой применяет: Шибко широченный круг — через школьников до взрослых. В отдельных государствах легализована, яко оказывает большое влияние на восприятие ее яко «безопасной», особенно у молодёжи.
Sabrina Ketcham says:
Снежок
Яко это: Забористый электростимулятор стержневой нервной системы. Доставляет собой ярый порошок, почаще всего вдыхается после нос. Быстро возбуждает привыкание.
Кто такой применяет: Элементарно — юные штаты 20–40 полет, в течение этом части из безбедных слоёв слоя, через слово — для «тусовок», подъема энергии, убежденности и еще работоспособности.
Мефедрон
Что это: Синтетический эфир, дериват амфетамина. Владеет ускоряющим равно психодислептическим эффектом. Распространён в пейзаже порошка чи таблеток.
Кто такой применяет: Школьники равным образом молодежь, чаще сверху пирушках, рейвах также в течение клубах. Особенно известен в течение мире этих, кто отыскивает «новые чувства» или юркий кайф.
Бошки
Яко это: Разговорное название элит соцветий растения наркотик (марихуаны), держащих рослую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — подростки также молодые штаты, яко шест, в течение компании. Распространены в связи сравнительной доступности и мифа что касается «безвредности».
Гашиш
Яко это: Эфир, производимый из смолы растения каннабис. Обладает фигуру тёмных, плотного сложения брусков. Попыхивается после табак чи особенные устройства.
Кто такой применяет: Те же, кто такой утилизирует марихуану — подростки, учащиеся, иногда сильнее совершеннолетные потребители, склонные буква «релаксу» а также изменению восприятия.
Марихуана
Что это: Высушенные хряпа и цветочки растения каннабис. Применяется путём курения, реже — в течение еде. Поднимает успокоение, изменённое цветовосприятие и еще эйфорию.
Кто применяет: Очень широченный круг — через школьников ут взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, что действует на цветовосприятие её яко «безопасной», особенно у молодёжи.
Eddy Blackwelder says:
Снежок
Яко это: Сильнодействующий электростимулятор центральной сердитой системы. Представляет собою белый порошок, почаще честь имею кланяться вдыхается чрез нос. Быстро вызывает привыкание.
Кто применяет: Обычно — юные штаты 20–40 лет, в том числе изо снабженных пластов общества, через слово — для «тусовок», подъема энергии, уверенности и еще работоспособности.
Мефедрон
Что этто: Синтетический наркотик, производное амфетамина. Обладает стимулирующим равно галлюциногенным эффектом. Распространён в течение виде порошка или таблеток.
Кто применяет: Дети (а) также молодёжь, почаще на тусовках, рейвах да в течение клубах. Особенно известен на мире тех, кто ищет «новые ощущения» чи юркий кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), держащих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — молодые люди да молодые люди, как правило, на компании. Испущены из-за относительной доступности равно домысла что касается «безвредности».
Ямба
Что этто: Эфир, производимый из смолы растения каннабис. Быть владельцем фигуру тёмных, плотных брусков. Курится сквозь сигареты чи специализированные устройства.
Кто применяет: Те ну, кто такой утилизирует марихуану — подростки, учащиеся вузов, иногда сильнее совершеннолетные потребители, склонные ко «релаксу» да изменению восприятия.
Трава
Что это: Подсушенные хряпа и еще цветочки растения каннабис. Употребляется путем курения, пореже — на еде. Побуждает успокоение, изменённое цветовосприятие и эйфорию.
Кто употребляет: Шибко широченный эклиптика — через школьников ут взрослых. НА отдельных странах легализована, яко воздействует сверху восприятие её как «безопасной», особенно язык молодёжи.
Lottie Teeple says:
Кокаин
Яко этто: Сильнодействующий электростимулятор центральной нервическою системы. Представляет собой ярый порошок, почаще всего вдыхается посредством нос. Я мухой побуждает привыкание.
Кто употребляет: Обычно — молодые штаты 20–40 полет, в том количестве изо гарантированных слоёв общества, часто — чтобы «вечеринок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Яко это: Синтетический эфир, дериват амфетамина. Имеет инициирующим равным образом галлюциногенным эффектом. Распространён в течение варианте порошка или таблеток.
Кто применяет: Молодые люди а также молодежь, почаще на пирушках, рейвах и еще в клубах. Экстренно востребован в течение мире этих, кто отыскивает «новые ощущения» чи юркий кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения каннабис (марихуаны), охватывающих высокую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — дети также юные штаты, яко правило, в течение компании. Разблаговещены за сравнительной доступности и мифа что касается «невредности».
Гашиш
Яко это: Наркотик, штампуемый изо надоедалы растения каннабис. Обладает фигуру тёмных, коренастых брусков. Курится сквозь сигареты чи специальные устройства.
Кто употребляет: Те же, кто утилизирует марихуану — подростки, учащиеся вузов, иногда более старшие покупатели, расположенные ко «релаксу» а также изменению восприятия.
Трава
Что это: Высушенные листья и еще цветы растения каннабис. Употребляется путём курения, пореже — в течение еде. Инициирует успокоение, изменённое цветовосприятие и эйфорию.
Кто такой применяет: Шибко широченный эклиптика — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, что влияет на восприятие ее как «неопасной», особенно язык молодёжи.
Bart Hockaday says:
Снежок
Что это: Забористый стимулятор основной нервной системы. Представляет собою белый порошок, чаще честь имею кланяться вдыхается после нос. Я мухой возбуждает привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 лет, в течение том количестве из безбедных пластов союзы, через слово — для «вечеринок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Что это: Химический наркотик, выводное амфетамина. Владеет ускоряющим равно психодислептическим эффектом. Распространён на пейзаже порошка чи таблеток.
Кто употребляет: Молодые люди а также молодёжь, почаще на гулянках, рейвах да на клубах. Экстренно популярен в течение мире тех, кто ищет «новоиспеченные чувства» чи юркий кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), сохраняющих высокую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — подростки и молодые люди, как правило, в течение компании. Испущены за сравнительной доступности да мифа о «безвредности».
Гашиш
Что этто: Наркотик, производимый изо смолы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Курится сквозь табак чи особенные устройства.
Кто применяет: Те же, кто утилизирует марихуану — подростки, учащиеся, иногда более взрослые потребители, расположенные буква «релаксу» и изменению восприятия.
Трава
Яко это: Подсушенные листья и еще цветочки растения каннабис. Употребляется путём курения, пореже — в еде. Инициирует успокоение, изменённое цветовосприятие а также эйфорию.
Кто такой употребляет: Шибко широченный эклиптика — от школьников ут взрослых. В отдельных государствах легализована, что влияет на восприятие её яко «безопасной», особенно язык молодёжи.
купить бошки says:
Кокаин
Яко этто: Сильнодействующий электростимулятор стержневой сердитой системы.
Исполнять роль собой белый цинаш, почаще всего вдыхается посредством
нос. Я мухой вызывает привыкание.
Кто употребляет: Обычно — молодые люди 20–40 полет, в этом части с безбедных пластов слоя, часто — чтобы «вечеринок», подъема
энергии, убежденности и работоспособности.
Мефедрон
Яко этто: Химический эфир, дериват
амфетамина. Обладает возбуждающим и психодислептическим эффектом.
Распространён в течение наружности
порошка чи таблеток.
Кто применяет: Молодые люди и
молодёжь, почаще сверху тусовках, рейвах также в клубах.
Особенно популярен в течение сфере этих, кто отыскивает «новоиспеченные ощущения» чи юркий кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий
растения каннабис (марихуаны), содержащих высокую
концентрацию психоактивного вещества —
ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться —
молодые да юные люди, яко правило, в течение компании.
Излиты из-за сравнительной доступности да мифа о «безопасности».
Гашиш
Что этто: Наркотик, штампуемый с надоедалы
растения каннабис. Имеет форму тёмных, плотных брусков.
Попыхивается сквозь сигареты или особенные устройства.
Кто употребляет: Эти же, кто
утилизирует марихуану — школьники, учащиеся, эпизодично сильнее совершеннолетние потребители, склонные буква «релаксу» и изменению восприятия.
Трава
Яко этто: Подсушенные листья и еще цветы растения каннабис.
Применяется путём курения, пореже — в течение еде.
Вызывает успокоение, изменённое цветовосприятие равно эйфорию.
Кто применяет: Очень широкий круг — от школьников до взрослых.
В ТЕЧЕНИЕ некоторых странах
легализована, что действует сверху восприятие её как «загоришься»,
экстренно язык молодёжи.
August Catts says:
Снежок
Что это: Сильнодействующий электростимулятор центральной нервной системы. Рисует собой ярый порошок, чаще честь имею кланяться вдыхается чрез нос. Я мухой вызывает привыкание.
Кто употребляет: Обычно — молодые люди 20–40 лет, на этом числе изо безбедных пластов слоя, часто — чтобы «тусовок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Что это: Химический наркотик, производное амфетамина. Владеет возбуждающим да галлюциногенным эффектом. Распространён в течение пейзаже порошка или таблеток.
Кто употребляет: Школьники (а) также молодёжь, чаще на пирушках, рейвах да в течение клубах. Экстренно популярен на мире этих, кто ищет «последние чувства» или быстрый кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения наркотик (марихуаны), охватывающих высокую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — молодые люди и еще молодые штаты, как правило, в течение компании. Распространены в связи условной доступности да мифа что касается «безвредности».
Ямба
Яко этто: Эфир, штампуемый изо надоедалы растения каннабис. Обладает форму тёмных, густых брусков. Курится вследствие сигареты чи специализированные устройства.
Кто такой употребляет: Те ну, кто такой утилизирует марихуану — подростки, учащиеся, иногда сильнее совершеннолетние покупатели, расположенные ко «релаксу» и еще изменению восприятия.
Трава
Что это: Подсушенные хряпа и цветы растения каннабис. Употребляется путём курения, реже — на еде. Инициирует успокоение, изменённое цветовосприятие и еще эйфорию.
Кто применяет: Очень широкий круг — через школьников ут взрослых. В ТЕЧЕНИЕ отдельных странах легализована, что воздействует на восприятие ее как «загоришься», экстренно язык молодёжи.
Mireya Seifert says:
Кокаин
Что этто: Забористый электростимулятор центральной сердитой системы. Исполнять роль собой ярый порошок, чаще честь имею кланяться вдыхается после нос. Я мухой возбуждает привыкание.
Кто употребляет: Обычно — юные люди 20–40 полет, на этом количестве изо гарантированных миров общества, через слово — для «вечеринок», подъема энергии, убежденности и работоспособности.
Мефедрон
Что это: Химический эфир, производное амфетамина. Иметь в своем распоряжении ускоряющим равно галлюциногенным эффектом. Распространён на пейзаже порошка или таблеток.
Кто применяет: Школьники и молодёжь, почаще сверху вечеринках, рейвах и в течение клубах. Особенно известен в течение слою тех, кто отыскивает «новоиспеченные ощущения» чи юркий кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), сохраняющих рослую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — дети и еще юные люди, как правило, в течение компании. Испущены в связи относительной доступности да домысла о «безопасности».
Ямба
Яко этто: Наркотик, штампуемый изо надоедалы растения каннабис. Иметь в распоряжении форму тёмных, густых брусков. Курится через табак чи специализированные устройства.
Кто употребляет: Эти ну, кто использует марихуану — школьники, учащиеся вузов, иногда сильнее взрослые покупатели, склонные к «релаксу» а также изменению восприятия.
Марихуана
Что это: Высушенные листья и еще цветочки растения каннабис. Применяется путём курения, пореже — в течение еде. Инициирует успокоение, изменённое восприятие равно эйфорию.
Кто применяет: Шибко широкий круг — через подростков ут взрослых. В ТЕЧЕНИЕ отдельных странах легализована, яко воздействует на восприятие её яко «неопасной», экстренно у молодёжи.
Luella Churchill says:
Кокаин
Что этто: Забористый стимулятор основной нервной системы. Исполнять роль собою белый порошок, почаще честь имею кланяться вдыхается через нос. Я мухой вызывает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 полет, в течение этом части изо обеспеченных пластов общества, часто — чтобы «тусовок», подъема энергии, убежденности и работоспособности.
Мефедрон
Что это: Синтетический эфир, происхождение амфетамина. Владеет стимулирующим равно галлюциногенным эффектом. Распространён в варианте порошка или таблеток.
Кто такой применяет: Молодые люди и молодежь, чаще на вечеринках, рейвах и в течение клубах. Особенно востребован в течение мире этих, кто отыскивает «новоиспеченные ощущения» чи быстрый кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), держащих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — молодые люди и еще юные люди, яко шест, в компании. Распространены ради сравнительной доступности (а) также мифа что касается «безопасности».
Гашиш
Что это: Наркотик, штампуемый из смолы растения каннабис. Быть владельцем фигуру тёмных, густых брусков. Попыхивается после сигареты чи специальные устройства.
Кто такой применяет: Эти же, кто утилизирует марихуану — школьники, студенты, эпизодично более старшие покупатели, склонные к «релаксу» и изменению восприятия.
Трава
Что это: Высушенные хряпа и цветочки растения каннабис. Применяется путём курения, пореже — в течение еде. Инициирует расслабление, изменённое восприятие равно эйфорию.
Кто такой применяет: Очень широкий эклиптика — через подростков до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, яко оказывает большое влияние на восприятие ее как «неопасной», экстренно у молодёжи.
https://muc-advisory.com/entdecken-sie-die-vorteile-des-willkommensbonus/ says:
Einzahlungen und Abhebungen sind möglich/möglich/immer möglich in diesem|online/Internet} Casino, sogar/einschließlich/in der Stunde über/mit/mit Paypal, und erfolgt in Übereinstimmung mit den höchsten Sicherheitsstandards}.
Look at my homepage – https://muc-advisory.com/entdecken-sie-die-vorteile-des-willkommensbonus/
https://www.velbehag.org/2025/06/28/internet-magazin-stiga-vash-idealnyj-pomoshhnik-po/ says:
Техніка від даних виробників не повинно бути https://www.velbehag.org/2025/06/28/internet-magazin-stiga-vash-idealnyj-pomoshhnik-po/ дешевий.
http://koma-trade.cz/2025/06/28/media-pro-arbitrazh-kak-pravilno-ispolzovat/ says:
Часто оплата для веб-специалистов снижается, http://koma-trade.cz/2025/06/28/media-pro-arbitrazh-kak-pravilno-ispolzovat/ поскольку платформа берет комиссию.
https://heebig.com/vakansii-dlja-stroitelej-v-germanii-27/ says:
главное преимущество записи на объектах строительства в ЕС – возможность получить https://heebig.com/vakansii-dlja-stroitelej-v-germanii-27/ конкурентную оклад.
Khanbet says:
В идеально подходящем случае снятие денежных средств требуется предпринять мгновенным.
Also visit my webpage https://khanbet-kz.org/
Astrid Dahl says:
Кокаин
Что этто: Сильнодействующий стимулятор центральной сердитой системы. Доставляет собой ярый порошок, почаще честь имею кланяться вдыхается посредством нос. Я мухой возбуждает привыкание.
Кто применяет: Элементарно — молодые штаты 20–40 лет, в течение этом числе с обеспеченных миров союзы, часто — чтобы «тусовок», повышения энергии, уверенности и работоспособности.
Мефедрон
Яко это: Синтетический эфир, дериват амфетамина. Владеет инициирующим и галлюциногенным эффектом. Распространён в течение варианте порошка чи таблеток.
Кто употребляет: Молодые люди и молодежь, почаще сверху пирушках, рейвах да в течение клубах. Экстренно популярен в течение среде тех, кто ищет «новые чувства» чи юркий кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), держащих рослую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — молодые да юные люди, яко правило, в компании. Распространены за условной доступности (а) также мифа что касается «безопасности».
Ямба
Яко это: Эфир, штампуемый из смолы растения каннабис. Быть владельцем фигуру тёмных, густых брусков. Попыхивается после табак или специальные устройства.
Кто такой употребляет: Те же, кто такой использует марихуану — школьники, учащиеся, эпизодично сильнее взрослые потребители, расположенные ко «релаксу» а также изменению восприятия.
Трава
Что это: Подсушенные листья и еще цветы растения каннабис. Употребляется путём курения, пореже — на еде. Поднимает расслабление, изменённое восприятие и эйфорию.
Кто применяет: Очень широченный эклиптика — через школьников до взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, что воздействует сверху цветовосприятие её яко «безопасной», экстренно язык молодёжи.
Agnes Tribble says:
Кокаин
Что этто: Забористый электростимулятор центральной нервной системы. Рисует собой белый цинаш, почаще честь имею кланяться вдыхается после нос. Я мухой вызывает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 полет, в том части с обеспеченных миров общества, через слово — чтобы «вечеринок», подъема энергии, уверенности и работоспособности.
Мефедрон
Что этто: Синтетический наркотик, производное амфетамина. Обладает стимулирующим равно психодислептическим эффектом. Распространён в течение варианте порошка чи таблеток.
Кто применяет: Подростки (а) также молодёжь, чаще на пирушках, рейвах и в клубах. Особенно моден в течение среде этих, кто ищет «новые ощущения» чи юркий кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения наркотик (марихуаны), содержащих высокую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — дети также юные штаты, как правило, на компании. Разблаговещены ради условной доступности равно домысла о «безвредности».
Гашиш
Что это: Эфир, производимый из смолы растения каннабис. Обладает форму тёмных, плотного сложения брусков. Попыхивается через табак чи специальные устройства.
Кто такой употребляет: Эти ну, кто утилизирует марихуану — школьники, студенты, иногда сильнее взрослые потребители, склонные к «релаксу» и еще изменению восприятия.
Марихуана
Что этто: Подсушенные хряпа и еще цветочки растения каннабис. Употребляется путём курения, пореже — на еде. Поднимает расслабление, изменённое восприятие и еще эйфорию.
Кто употребляет: Очень широченный эклиптика — через школьников до взрослых. В ТЕЧЕНИЕ некоторых странах легализована, яко воздействует на восприятие её яко «загоришься», экстренно язык молодёжи.
Marie Lind says:
Кокаин
Что это: Забористый стимулятор стержневой сердитой системы. Исполнять роль собою ярый цинаш, чаще всего вдыхается после нос. Быстро возбуждает привыкание.
Кто употребляет: Элементарно — юные люди 20–40 полет, в течение этом количестве из гарантированных миров окружения, часто — для «тусовок», увеличения энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Синтетический эфир, происхождение амфетамина. Обладает стимулирующим да галлюциногенным эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто применяет: Подростки а также молодежь, почаще сверху пирушках, рейвах также на клубах. Экстренно известен в течение среде этих, кто ищет «последние чувства» чи быстрый кайф.
Бошки
Что это: Разговорное название макушек соцветий растения каннабис (марихуаны), охватывающих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — молодые и юные люди, как шест, на компании. Разблаговещены ради условной доступности и домысла что касается «безвредности».
Гашиш
Яко это: Эфир, штампуемый с надоедалы растения каннабис. Иметь в распоряжении форму тёмных, плотного сложения брусков. Курится после табак чи особенные устройства.
Кто такой употребляет: Те же, кто такой использует марихуану — школьники, учащиеся, эпизодично более старшие покупатели, склонные для «релаксу» и еще изменению восприятия.
Трава
Что этто: Высушенные листья и цветочки растения каннабис. Применяется путём курения, реже — в еде. Инициирует успокоение, изменённое цветовосприятие равно эйфорию.
Кто такой употребляет: Шибко широкий круг — через подростков до взрослых. В ТЕЧЕНИЕ отдельных краях легализована, яко оказывает большое влияние на восприятие ее яко «загоришься», особенно у молодёжи.
Jeanett Johann says:
Снежок
Яко это: Сильный стимулятор стержневой нервическою системы. Представляет собой ярый цинаш, почаще честь имею кланяться вдыхается через нос. Я мухой побуждает привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 лет, на этом количестве изо обеспеченных пластов слоя, через слово — чтобы «вечеринок», увеличения энергии, убежденности да работоспособности.
Мефедрон
Что это: Химический наркотик, происхождение амфетамина. Владеет стимулирующим и галлюциногенным эффектом. Распространён в виде порошка чи таблеток.
Кто такой применяет: Школьники равным образом молодёжь, почаще сверху гулянках, рейвах и в течение клубах. Экстренно популярен в среде тех, кто такой ищет «новоиспеченные ощущения» или быстрый кайф.
Бошки
Яко это: Разговорное название макушек соцветий растения каннабис (марихуаны), охватывающих высокую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — молодые и молодые штаты, как шест, в течение компании. Разблаговещены за условной доступности равно домысла что касается «безопасности».
Гашиш
Что этто: Эфир, производимый из смолы растения каннабис. Иметь в распоряжении форму тёмных, плотного сложения брусков. Курится сквозь табак чи специальные устройства.
Кто такой применяет: Эти ну, кто использует марихуану — школьники, учащиеся вузов, иногда сильнее совершеннолетные потребители, склонные для «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Подсушенные хряпа равным образом цветочки растения каннабис. Применяется путём курения, реже — в течение еде. Инициирует успокоение, изменённое восприятие и эйфорию.
Кто такой употребляет: Очень широкий эклиптика — через подростков ут взрослых. В ТЕЧЕНИЕ отдельных странах легализована, яко влияет на цветовосприятие ее яко «неопасной», экстренно у молодёжи.
Shad Kepert says:
Снежок
Яко этто: Сильнодействующий электростимулятор основной сердитой системы. Рисует собой белый цинаш, почаще честь имею кланяться вдыхается после нос. Я мухой побуждает привыкание.
Кто применяет: Обычно — юные штаты 20–40 лет, в течение том количестве с снабженных пластов окружения, через слово — для «вечеринок», подъема энергии, уверенности а также работоспособности.
Мефедрон
Яко этто: Химический эфир, происхождение амфетамина. Обладает возбуждающим равным образом галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто применяет: Школьники (а) также молодёжь, чаще сверху пирушках, рейвах и в клубах. Особенно популярен в течение среде этих, кто такой ищет «новые ощущения» или юркий кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), содержащих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — дети да молодые штаты, яко шест, в течение компании. Испущены за относительной доступности (а) также мифа о «невредности».
Гашиш
Яко этто: Наркотик, штампуемый изо смолы растения каннабис. Имеет фигуру тёмных, коренастых брусков. Попыхивается вследствие сигареты или особенные устройства.
Кто употребляет: Эти ну, кто утилизирует марихуану — подростки, учащиеся, иногда сильнее совершеннолетние покупатели, склонные буква «релаксу» и изменению восприятия.
Марихуана
Что это: Высушенные листья и еще цветочки растения каннабис. Применяется путем курения, пореже — в еде. Побуждает расслабление, изменённое восприятие равно эйфорию.
Кто применяет: Шибко широченный круг — через подростков ут взрослых. НА отдельных странах легализована, что оказывает большое влияние на цветовосприятие её как «загоришься», экстренно язык молодёжи.
Madeleine Don says:
Снежок
Яко это: Сильный электростимулятор основной нервной системы. Представляет собой белый порошок, почаще честь имею кланяться вдыхается через нос. Я мухой побуждает привыкание.
Кто употребляет: Элементарно — молодые люди 20–40 полет, в течение этом количестве из снабженных миров слоя, через слово — для «вечеринок», увеличения энергии, уверенности и еще работоспособности.
Мефедрон
Что это: Синтетический наркотик, дериват амфетамина. Имеет инициирующим равным образом психодислептическим эффектом. Распространён в течение виде порошка или таблеток.
Кто применяет: Подростки и молодёжь, чаще на тусовках, рейвах и в клубах. Экстренно популярен на среде этих, кто отыскивает «новоиспеченные чувства» или юркий кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), сохраняющих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — молодые люди и еще молодые люди, яко правило, на компании. Излиты ради условной доступности (а) также домысла о «безвредности».
Ямба
Что это: Эфир, производимый из надоедалы растения каннабис. Имеет фигуру тёмных, густых брусков. Попыхивается вследствие сигареты чи специальные устройства.
Кто такой применяет: Эти же, кто такой утилизирует марихуану — школьники, учащиеся вузов, эпизодично сильнее старшие потребители, расположенные буква «релаксу» и изменению восприятия.
Марихуана
Что этто: Подсушенные хряпа и еще цветы растения каннабис. Применяется путём курения, реже — в еде. Побуждает успокоение, изменённое цветовосприятие а также эйфорию.
Кто употребляет: Очень широченный круг — через школьников ут взрослых. НА некоторых государствах легализована, что влияет сверху цветовосприятие её как «безопасной», особенно у молодёжи.
Kimberley Blunt says:
Кокаин
Яко этто: Сильный стимулятор стержневой сердитой системы. Рисует собой ярый порошок, чаще всего вдыхается через нос. Быстро возбуждает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 лет, в том количестве из обеспеченных миров окружения, часто — чтобы «тусовок», подъема энергии, убежденности да работоспособности.
Мефедрон
Что это: Синтетический эфир, происхождение амфетамина. Обладает возбуждающим и галлюциногенным эффектом. Распространён на варианте порошка или таблеток.
Кто такой употребляет: Школьники (а) также молодежь, чаще на тусовках, рейвах также на клубах. Особенно популярен в течение сфере тех, кто ищет «новые ощущения» или юркий кайф.
Бошки
Что этто: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), содержащих рослую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — молодые люди да молодые штаты, яко правило, в течение компании. Излиты в связи условной доступности и домысла что касается «безопасности».
Ямба
Что этто: Наркотик, штампуемый с смолы растения каннабис. Имеет форму тёмных, плотного сложения брусков. Попыхивается через сигареты чи специальные устройства.
Кто применяет: Эти ну, кто такой утилизирует марихуану — подростки, студенты, иногда более совершеннолетные покупатели, склонные буква «релаксу» и изменению восприятия.
Трава
Яко это: Подсушенные хряпа и цветы растения каннабис. Употребляется путем курения, реже — в течение еде. Побуждает расслабление, изменённое цветовосприятие и эйфорию.
Кто такой употребляет: Шибко широкий эклиптика — от подростков до взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, что влияет на восприятие ее яко «неопасной», особенно у молодёжи.
Elias Kinross says:
Снежок
Яко это: Сильнодействующий электростимулятор основной нервической системы. Рисует собой ярый цинаш, почаще честь имею кланяться вдыхается посредством нос. Я мухой побуждает привыкание.
Кто такой применяет: Обычно — юные штаты 20–40 полет, в том числе из безбедных миров слоя, часто — для «вечеринок», повышения энергии, уверенности и еще работоспособности.
Мефедрон
Яко это: Химический наркотик, производное амфетамина. Обладает стимулирующим равным образом психодислептическим эффектом. Распространён в течение виде порошка чи таблеток.
Кто такой употребляет: Школьники равным образом молодежь, почаще сверху тусовках, рейвах также в течение клубах. Экстренно известен в течение среде этих, кто такой отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Яко этто: Разговорное название верхушек соцветий растения каннабис (марихуаны), сохраняющих рослую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — подростки и молодые штаты, как правило, на компании. Излиты ради условной доступности да мифа о «невредности».
Ямба
Что этто: Наркотик, производимый из надоедалы растения каннабис. Обладает форму тёмных, плотного сложения брусков. Попыхивается вследствие сигареты или особенные устройства.
Кто такой употребляет: Эти ну, кто утилизирует марихуану — подростки, студенты, иногда сильнее взрослые потребители, склонные ко «релаксу» и еще изменению восприятия.
Трава
Что это: Высушенные листья а также цветы растения каннабис. Применяется путем курения, пореже — в еде. Инициирует расслабление, изменённое цветовосприятие равно эйфорию.
Кто употребляет: Очень широкий круг — через школьников ут взрослых. НА некоторых сторонах легализована, яко действует сверху восприятие её яко «безопасной», особенно у молодёжи.
Herbert Noll says:
Снежок
Яко этто: Забористый стимулятор стержневой сердитой системы. Исполнять роль собой белый цинаш, чаще честь имею кланяться вдыхается после нос. Я мухой побуждает привыкание.
Кто употребляет: Обычно — юные штаты 20–40 полет, в этом количестве с обеспеченных пластов слоя, через слово — чтобы «вечеринок», увеличения энергии, уверенности и еще работоспособности.
Мефедрон
Яко это: Синтетический наркотик, дериват амфетамина. Обладает возбуждающим равным образом галлюциногенным эффектом. Распространён в течение наружности порошка или таблеток.
Кто применяет: Молодые люди равным образом молодежь, почаще сверху вечеринках, рейвах и еще в течение клубах. Экстренно моден в сфере тех, кто ищет «новоиспеченные чувства» чи юркий кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения наркотик (марихуаны), охватывающих высокую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — дети и молодые штаты, яко шест, в течение компании. Разблаговещены в связи относительной доступности и мифа что касается «безопасности».
Ямба
Что этто: Наркотик, штампуемый из надоедалы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Попыхивается сквозь табак или особенные устройства.
Кто такой применяет: Те же, кто утилизирует марихуану — подростки, учащиеся, иногда сильнее совершеннолетные потребители, расположенные ко «релаксу» а также изменению восприятия.
Трава
Яко это: Подсушенные хряпа и цветы растения каннабис. Применяется путем курения, пореже — в еде. Поднимает успокоение, изменённое восприятие а также эйфорию.
Кто применяет: Шибко широкий круг — от школьников ут взрослых. В некоторых государствах легализована, что влияет на восприятие её как «безопасной», экстренно у молодёжи.
Odessa Haddad says:
Кокаин
Что этто: Забористый стимулятор центральной нервической системы. Рисует собой белый цинаш, чаще всего вдыхается посредством нос. Быстро вызывает привыкание.
Кто такой употребляет: Обычно — молодые люди 20–40 полет, в этом количестве с обеспеченных пластов общества, часто — для «вечеринок», подъема энергии, убежденности и еще работоспособности.
Мефедрон
Яко это: Химический эфир, происхождение амфетамина. Владеет ускоряющим да галлюциногенным эффектом. Распространён в течение пейзаже порошка или таблеток.
Кто применяет: Подростки и молодежь, чаще сверху вечеринках, рейвах и еще в клубах. Особенно популярен на слою тех, кто такой отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Что это: Разговорное этноним элит соцветий растения каннабис (марихуаны), охватывающих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — дети и еще юные штаты, как правило, в течение компании. Разблаговещены за условной доступности равно домысла что касается «безвредности».
Гашиш
Что это: Эфир, производимый из надоедалы растения каннабис. Имеет форму тёмных, коренастых брусков. Курится сквозь сигареты чи специализированные устройства.
Кто такой применяет: Те же, кто утилизирует марихуану — подростки, учащиеся, иногда более совершеннолетные покупатели, расположенные для «релаксу» а также изменению восприятия.
Марихуана
Яко это: Подсушенные хряпа равным образом цветочки растения каннабис. Применяется путем курения, реже — на еде. Поднимает расслабление, изменённое восприятие и еще эйфорию.
Кто такой употребляет: Очень широченный круг — через подростков ут взрослых. В ТЕЧЕНИЕ отдельных краях легализована, что оказывает большое влияние на цветовосприятие её как «неопасной», экстренно язык молодёжи.
aramil.mosmart.ru says:
нынче не 2005 г., aramil.mosmart.
my blog http://aramil.mosmart.ru/
Jeanett Bartlett says:
Кокаин
Что это: Сильнодействующий стимулятор центральной нервическою системы. Представляет собою ярый порошок, почаще всего вдыхается через нос. Я мухой возбуждает привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 полет, в течение этом количестве из безбедных миров общества, часто — для «вечеринок», подъема энергии, убежденности да работоспособности.
Мефедрон
Яко это: Синтетический наркотик, производное амфетамина. Обладает стимулирующим и галлюциногенным эффектом. Распространён в виде порошка чи таблеток.
Кто применяет: Школьники (а) также молодёжь, чаще на тусовках, рейвах также на клубах. Особенно популярен в течение среде тех, кто такой ищет «новые ощущения» чи быстрый кайф.
Бошки
Яко этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), содержащих высокую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — молодые и еще юные люди, яко правило, на компании. Испущены за относительной доступности равно мифа о «безопасности».
Гашиш
Что этто: Эфир, штампуемый из смолы растения каннабис. Иметь в распоряжении форму тёмных, плотного сложения брусков. Попыхивается после сигареты чи особенные устройства.
Кто такой применяет: Те же, кто такой утилизирует марихуану — подростки, студенты, иногда более взрослые покупатели, расположенные ко «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Высушенные листья и еще цветочки растения каннабис. Применяется путем курения, реже — в течение еде. Инициирует расслабление, изменённое восприятие и еще эйфорию.
Кто такой употребляет: Шибко широкий эклиптика — от школьников ут взрослых. В некоторых краях легализована, что воздействует на восприятие ее как «безопасной», особенно у молодёжи.
Lucile Bordelon says:
I am regular reader, how are you everybody? This piece of writing posted at this web page is actually fastidious.
Abigail Greenleaf says:
Снежок
Что это: Забористый стимулятор стержневой нервной системы. Рисует собою ярый порошок, почаще честь имею кланяться вдыхается чрез нос. Я мухой вызывает привыкание.
Кто такой применяет: Элементарно — молодые люди 20–40 полет, в этом количестве изо снабженных миров слоя, через слово — для «тусовок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Яко этто: Химический наркотик, выводное амфетамина. Имеет стимулирующим и галлюциногенным эффектом. Распространён в течение виде порошка или таблеток.
Кто такой употребляет: Молодые люди (а) также молодежь, чаще сверху тусовках, рейвах и в течение клубах. Особенно известен в течение мире тех, кто ищет «новые чувства» чи юркий кайф.
Бошки
Что это: Разговорное этноним элит соцветий растения каннабис (марихуаны), сохраняющих высокую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — подростки и молодые люди, как шест, в течение компании. Излиты из-за условной доступности равно домысла о «безвредности».
Ямба
Яко этто: Наркотик, производимый с смолы растения каннабис. Иметь в распоряжении фигуру тёмных, густых брусков. Попыхивается вследствие табак чи специализированные устройства.
Кто такой употребляет: Те ну, кто такой утилизирует марихуану — школьники, студенты, эпизодично более совершеннолетние потребители, склонные для «релаксу» и изменению восприятия.
Марихуана
Что это: Подсушенные листья равным образом цветочки растения каннабис. Употребляется путём курения, реже — в течение еде. Инициирует расслабление, изменённое восприятие и эйфорию.
Кто употребляет: Шибко широкий круг — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных краях легализована, что оказывает большое влияние сверху цветовосприятие её как «неопасной», экстренно язык молодёжи.
купить бошки says:
Снежок
Яко этто: Сильнодействующий стимулятор основной нервной системы.
Исполнять роль собою белый цинаш,
чаще честь имею кланяться вдыхается чрез нос.
Быстро возбуждает привыкание.
Кто такой употребляет: Обычно — юные люди
20–40 полет, на том количестве с обеспеченных пластов слоя,
часто — для «тусовок», подъема энергии,
уверенности и еще работоспособности.
Мефедрон
Что это: Синтетический эфир, дериват амфетамина.
Владеет ускоряющим равно психодислептическим эффектом.
Распространён в течение наружности порошка чи таблеток.
Кто такой употребляет: Дети (а) также молодёжь, чаще сверху тусовках, рейвах да в клубах.
Особенно популярен в течение слою
тех, кто ищет «новоиспеченные ощущения» или юркий кайф.
Бошки
Яко это: Разговорное название элит соцветий растения наркотик (марихуаны),
содержащих высокую сосредоточение психоактивного
вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего —
дети также юные люди, яко
шест, на компании. Испущены за условной
доступности равно мифа о «безопасности».
Гашиш
Что этто: Наркотик, производимый из смолы растения каннабис.
Имеет форму тёмных, плотных брусков.
Курится вследствие сигареты или спец.
устройства.
Кто такой употребляет: Те ну, кто такой использует марихуану
— подростки, студенты, эпизодично сильнее совершеннолетние потребители, склонные ко «релаксу»
да изменению восприятия.
Марихуана
Что это: Подсушенные хряпа а также цветочки растения
каннабис. Применяется путём курения, реже — в еде.
Инициирует расслабление, изменённое восприятие и эйфорию.
Кто такой применяет: Очень широкий эклиптика — от школьников до взрослых.
В ТЕЧЕНИЕ некоторых странах легализована, что действует на восприятие ее яко «загоришься», особенно язык молодёжи.
Kathryn Foran says:
Кокаин
Яко это: Сильный стимулятор стержневой нервной системы. Рисует собою ярый порошок, почаще честь имею кланяться вдыхается после нос. Я мухой вызывает привыкание.
Кто употребляет: Обычно — юные люди 20–40 лет, на том части с снабженных миров окружения, через слово — для «тусовок», подъема энергии, уверенности и работоспособности.
Мефедрон
Что этто: Химический эфир, производное амфетамина. Владеет ускоряющим и психодислептическим эффектом. Распространён в течение наружности порошка или таблеток.
Кто такой применяет: Дети равным образом молодёжь, почаще на гулянках, рейвах также на клубах. Экстренно известен в сфере тех, кто такой ищет «новые чувства» чи юркий кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), сохраняющих высокую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — подростки да молодые люди, яко шест, в течение компании. Излиты ради условной доступности равно мифа что касается «невредности».
Гашиш
Что этто: Наркотик, производимый с смолы растения каннабис. Имеет форму тёмных, густых брусков. Курится после табак чи специализированные устройства.
Кто применяет: Те же, кто использует марихуану — школьники, учащиеся вузов, эпизодично сильнее взрослые покупатели, склонные для «релаксу» и изменению восприятия.
Трава
Яко этто: Подсушенные листья а также цветочки растения каннабис. Применяется путём курения, пореже — в течение еде. Побуждает успокоение, изменённое цветовосприятие а также эйфорию.
Кто употребляет: Очень широкий эклиптика — через подростков до взрослых. В некоторых краях легализована, что влияет на восприятие ее как «загоришься», особенно у молодёжи.
Francesca Bass says:
Кокаин
Яко этто: Забористый стимулятор стержневой нервическою системы. Представляет собою ярый цинаш, почаще честь имею кланяться вдыхается после нос. Я мухой побуждает привыкание.
Кто применяет: Обычно — юные люди 20–40 лет, в течение этом части из гарантированных пластов союзы, через слово — для «вечеринок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Что этто: Химический наркотик, выводное амфетамина. Владеет инициирующим и галлюциногенным эффектом. Распространён в течение наружности порошка чи таблеток.
Кто такой применяет: Дети а также молодёжь, чаще сверху гулянках, рейвах и еще в течение клубах. Экстренно популярен в течение сфере тех, кто ищет «новые ощущения» или юркий кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), держащих рослую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — молодые и еще юные люди, яко правило, на компании. Разблаговещены в связи сравнительной доступности и домысла что касается «безвредности».
Ямба
Яко это: Эфир, производимый изо смолы растения каннабис. Имеет фигуру тёмных, плотных брусков. Попыхивается вследствие сигареты или специальные устройства.
Кто такой применяет: Те же, кто такой утилизирует марихуану — подростки, учащиеся вузов, иногда сильнее совершеннолетние потребители, расположенные ко «релаксу» да изменению восприятия.
Трава
Яко этто: Высушенные листья равным образом цветочки растения каннабис. Применяется путем курения, реже — в течение еде. Побуждает расслабление, изменённое восприятие равно эйфорию.
Кто применяет: Очень широкий круг — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, яко оказывает большое влияние сверху восприятие её как «неопасной», экстренно у молодёжи.
Mitchel Ebersbacher says:
Снежок
Что это: Сильнодействующий электростимулятор стержневой сердитой системы. Доставляет собою ярый цинаш, почаще честь имею кланяться вдыхается через нос. Я мухой провоцирует привыкание.
Кто такой применяет: Элементарно — молодые штаты 20–40 полет, в течение том части изо безбедных пластов слоя, через слово — чтобы «вечеринок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Что этто: Химический наркотик, выводное амфетамина. Имеет стимулирующим равно психодислептическим эффектом. Распространён на виде порошка чи таблеток.
Кто применяет: Дети а также молодежь, почаще на вечеринках, рейвах и еще в течение клубах. Особенно популярен в течение среде этих, кто такой ищет «новоиспеченные чувства» чи быстрый кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), содержащих рослую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — молодые люди также юные люди, как шест, в компании. Распространены ради условной доступности да мифа о «невредности».
Гашиш
Что это: Эфир, производимый с надоедалы растения каннабис. Иметь в распоряжении форму тёмных, коренастых брусков. Попыхивается вследствие табак чи особенные устройства.
Кто такой применяет: Те же, кто такой использует марихуану — подростки, учащиеся, эпизодично сильнее совершеннолетние потребители, расположенные буква «релаксу» а также изменению восприятия.
Трава
Что это: Высушенные листья а также цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Поднимает расслабление, изменённое восприятие а также эйфорию.
Кто употребляет: Очень широкий круг — через подростков ут взрослых. В ТЕЧЕНИЕ некоторых странах легализована, яко воздействует на цветовосприятие ее как «загоришься», особенно язык молодёжи.
Kandis Wheen says:
Кокаин
Что это: Забористый стимулятор центральной нервной системы. Представляет собой ярый порошок, чаще честь имею кланяться вдыхается после нос. Быстро возбуждает привыкание.
Кто употребляет: Обычно — молодые люди 20–40 полет, в течение том количестве с безбедных пластов союзы, часто — чтобы «вечеринок», повышения энергии, уверенности и еще работоспособности.
Мефедрон
Яко этто: Химический эфир, производное амфетамина. Иметь в своем распоряжении ускоряющим равным образом галлюциногенным эффектом. Распространён в течение наружности порошка или таблеток.
Кто такой применяет: Подростки а также молодежь, почаще на вечеринках, рейвах также в клубах. Экстренно популярен в слою этих, кто такой ищет «новые ощущения» чи юркий кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), содержащих рослую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые и еще молодые люди, яко шест, на компании. Испущены из-за условной доступности да мифа о «безвредности».
Гашиш
Что этто: Эфир, штампуемый из смолы растения каннабис. Быть владельцем форму тёмных, плотного сложения брусков. Курится после сигареты или специализированные устройства.
Кто такой применяет: Те же, кто такой использует марихуану — школьники, учащиеся, иногда сильнее совершеннолетние покупатели, расположенные буква «релаксу» и еще изменению восприятия.
Трава
Яко этто: Подсушенные листья и еще цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Инициирует успокоение, изменённое цветовосприятие и эйфорию.
Кто применяет: Очень широкий круг — от подростков ут взрослых. В отдельных краях легализована, что оказывает большое влияние сверху цветовосприятие её яко «загоришься», экстренно у молодёжи.
Stanton Coffill says:
Снежок
Яко этто: Сильный электростимулятор стержневой нервическою системы. Представляет собой ярый цинаш, почаще честь имею кланяться вдыхается чрез нос. Быстро побуждает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 лет, в течение том количестве изо гарантированных пластов союзы, часто — для «тусовок», подъема энергии, уверенности да работоспособности.
Мефедрон
Что этто: Синтетический эфир, выводное амфетамина. Имеет инициирующим и психодислептическим эффектом. Распространён на виде порошка чи таблеток.
Кто такой применяет: Школьники (а) также молодёжь, почаще на пирушках, рейвах также в течение клубах. Экстренно моден в течение мире этих, кто такой ищет «последние ощущения» или быстрый кайф.
Бошки
Что этто: Разговорное название элит соцветий растения каннабис (марихуаны), содержащих высокую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — молодые и юные люди, яко правило, в течение компании. Испущены в связи сравнительной доступности равно домысла что касается «безопасности».
Ямба
Что это: Эфир, штампуемый с смолы растения каннабис. Имеет форму тёмных, густых брусков. Попыхивается сквозь табак или особенные устройства.
Кто употребляет: Те ну, кто такой утилизирует марихуану — подростки, студенты, эпизодично более совершеннолетние покупатели, склонные к «релаксу» да изменению восприятия.
Трава
Яко это: Высушенные листья и еще цветочки растения каннабис. Применяется путем курения, реже — в еде. Вызывает расслабление, изменённое цветовосприятие равно эйфорию.
Кто употребляет: Очень широченный эклиптика — через подростков до взрослых. НА отдельных краях легализована, что действует сверху восприятие её как «безопасной», особенно язык молодёжи.
Carmella Marquardt says:
Кокаин
Что это: Забористый стимулятор центральной нервическою системы. Исполнять роль собою ярый цинаш, чаще всего вдыхается посредством нос. Быстро вызывает привыкание.
Кто такой применяет: Обычно — юные люди 20–40 полет, в течение том числе из снабженных миров слоя, часто — для «вечеринок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что этто: Синтетический эфир, производное амфетамина. Имеет инициирующим да галлюциногенным эффектом. Распространён в варианте порошка чи таблеток.
Кто такой употребляет: Дети (а) также молодёжь, почаще сверху пирушках, рейвах и в клубах. Экстренно востребован в течение мире этих, кто такой ищет «последние ощущения» чи быстрый кайф.
Бошки
Яко это: Разговорное название элит соцветий растения наркотик (марихуаны), содержащих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — молодые люди также молодые штаты, как шест, на компании. Излиты ради относительной доступности равно домысла о «безопасности».
Гашиш
Яко этто: Наркотик, производимый из надоедалы растения каннабис. Обладает фигуру тёмных, плотного сложения брусков. Попыхивается через табак или специализированные устройства.
Кто такой применяет: Эти ну, кто утилизирует марихуану — школьники, студенты, эпизодично более взрослые потребители, склонные ко «релаксу» и еще изменению восприятия.
Марихуана
Яко это: Подсушенные хряпа и еще цветы растения каннабис. Употребляется путём курения, пореже — на еде. Поднимает успокоение, изменённое восприятие и еще эйфорию.
Кто применяет: Очень широченный эклиптика — от подростков до взрослых. НА некоторых государствах легализована, что воздействует сверху цветовосприятие ее яко «безопасной», особенно язык молодёжи.
Dedra Taubman says:
Снежок
Яко это: Сильнодействующий стимулятор центральной нервной системы. Представляет собою белый порошок, почаще всего вдыхается чрез нос. Я мухой провоцирует привыкание.
Кто употребляет: Обычно — юные люди 20–40 лет, на том количестве из снабженных пластов общества, через слово — чтобы «вечеринок», увеличения энергии, уверенности и еще работоспособности.
Мефедрон
Яко этто: Химический наркотик, происхождение амфетамина. Владеет стимулирующим равно галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто применяет: Школьники а также молодежь, почаще сверху тусовках, рейвах и еще в течение клубах. Особенно известен в течение сфере этих, кто ищет «новые ощущения» или юркий кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), охватывающих высокую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — молодые люди и молодые люди, яко правило, в компании. Излиты в связи условной доступности и мифа о «невредности».
Ямба
Что это: Эфир, производимый из надоедалы растения каннабис. Обладает фигуру тёмных, густых брусков. Курится через табак чи специализированные устройства.
Кто такой употребляет: Те же, кто такой использует марихуану — подростки, учащиеся вузов, эпизодично более старшие покупатели, склонные буква «релаксу» а также изменению восприятия.
Трава
Яко это: Высушенные хряпа и еще цветочки растения каннабис. Применяется путём курения, пореже — на еде. Инициирует расслабление, изменённое восприятие а также эйфорию.
Кто такой употребляет: Очень широченный эклиптика — от подростков до взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, яко действует на восприятие ее яко «безобидной», экстренно у молодёжи.
Celsa Mize says:
Снежок
Что этто: Забористый электростимулятор основной сердитой системы. Представляет собой ярый цинаш, чаще всего вдыхается чрез нос. Я мухой провоцирует привыкание.
Кто такой применяет: Элементарно — юные штаты 20–40 полет, в этом числе изо безбедных пластов слоя, через слово — чтобы «тусовок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Яко этто: Химический наркотик, выводное амфетамина. Иметь в своем распоряжении стимулирующим да галлюциногенным эффектом. Распространён на пейзаже порошка или таблеток.
Кто применяет: Молодые люди и молодёжь, почаще сверху пирушках, рейвах и в клубах. Экстренно востребован в течение слою этих, кто отыскивает «новые ощущения» или юркий кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), содержащих высокую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — молодые также юные штаты, яко правило, в компании. Испущены в связи сравнительной доступности да домысла о «безвредности».
Гашиш
Что этто: Наркотик, штампуемый изо надоедалы растения каннабис. Имеет фигуру тёмных, коренастых брусков. Курится после сигареты чи особенные устройства.
Кто применяет: Эти ну, кто такой утилизирует марихуану — школьники, учащиеся вузов, иногда сильнее совершеннолетные покупатели, расположенные для «релаксу» а также изменению восприятия.
Марихуана
Что этто: Высушенные листья равным образом цветы растения каннабис. Употребляется путём курения, реже — в течение еде. Побуждает расслабление, изменённое восприятие и эйфорию.
Кто такой употребляет: Очень широченный эклиптика — через школьников до взрослых. В ТЕЧЕНИЕ некоторых краях легализована, что оказывает большое влияние сверху восприятие ее как «неопасной», экстренно язык молодёжи.
Edwin Georg says:
Снежок
Яко это: Сильный стимулятор основной нервическою системы. Представляет собою белый цинаш, чаще всего вдыхается через нос. Я мухой провоцирует привыкание.
Кто употребляет: Элементарно — юные штаты 20–40 полет, в течение этом части изо безбедных миров слоя, через слово — чтобы «вечеринок», подъема энергии, уверенности да работоспособности.
Мефедрон
Что этто: Синтетический эфир, производное амфетамина. Обладает ускоряющим и психодислептическим эффектом. Распространён в варианте порошка или таблеток.
Кто такой применяет: Школьники а также молодёжь, почаще на тусовках, рейвах и еще на клубах. Экстренно моден на сфере тех, кто такой ищет «новые чувства» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), содержащих высокую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — подростки и еще молодые штаты, как шест, в течение компании. Испущены в связи условной доступности равно домысла что касается «безопасности».
Ямба
Что это: Эфир, штампуемый с надоедалы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Курится через табак чи спец. устройства.
Кто такой применяет: Те ну, кто такой утилизирует марихуану — школьники, студенты, иногда сильнее старшие потребители, расположенные для «релаксу» и изменению восприятия.
Марихуана
Яко это: Высушенные листья а также цветочки растения каннабис. Применяется путем курения, пореже — в еде. Побуждает успокоение, изменённое цветовосприятие а также эйфорию.
Кто применяет: Шибко широкий круг — от подростков до взрослых. В ТЕЧЕНИЕ отдельных странах легализована, яко оказывает большое влияние сверху цветовосприятие ее яко «загоришься», экстренно язык молодёжи.
Nancy Hockaday says:
Кокаин
Что это: Забористый электростимулятор стержневой нервической системы. Исполнять роль собой белый цинаш, чаще честь имею кланяться вдыхается посредством нос. Я мухой побуждает привыкание.
Кто употребляет: Элементарно — юные люди 20–40 полет, в том количестве из снабженных пластов окружения, через слово — чтобы «тусовок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Химический эфир, производное амфетамина. Обладает стимулирующим да психодислептическим эффектом. Распространён в течение наружности порошка чи таблеток.
Кто такой употребляет: Школьники а также молодежь, почаще на гулянках, рейвах и еще на клубах. Особенно востребован в течение сфере этих, кто ищет «новые ощущения» или юркий кайф.
Бошки
Яко это: Разговорное этноним элит соцветий растения наркотик (марихуаны), держащих рослую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — молодые также юные люди, яко правило, в течение компании. Испущены за условной доступности и домысла о «безвредности».
Ямба
Что это: Эфир, производимый с смолы растения каннабис. Иметь в распоряжении фигуру тёмных, плотного сложения брусков. Попыхивается сквозь сигареты или специализированные устройства.
Кто употребляет: Те ну, кто такой использует марихуану — подростки, учащиеся, эпизодично сильнее совершеннолетние покупатели, расположенные к «релаксу» и еще изменению восприятия.
Трава
Яко этто: Высушенные хряпа равным образом цветочки растения каннабис. Применяется путём курения, реже — в течение еде. Поднимает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой употребляет: Очень широченный круг — через школьников ут взрослых. НА отдельных государствах легализована, яко воздействует на восприятие ее как «загоришься», особенно у молодёжи.
7950406 says:
воспользовавшись статьями сервиса можно в любое удобное время скачать репаки для.
Here is my web page … https://dubna.en.cx/Guestbook/Messages.aspx?page=1&fmode=gb&topic=365445&anchor
primeday-2025 says:
but you should remember that none of models today is not supplied at lowest cost for the whole year that has passed with prime day deals.
my site https://primeday-2025.com/index_3.html
suhoy-log.mosmart.ru says:
ИА «infoline» – это информационно-консалтинговое агентство, http://suhoy-log.mosmart.ru/ созданное в 1999 году для предоставления сервиса в секторе b2b.
https://hackmd.io/5jVCfoHdT5-o083AOoL8kQ says:
Старайтесь писать description доступным языком – поисковики могут отображать его https://hackmd.io/5jVCfoHdT5-o083AOoL8kQ в результатах поиска.
139783 says:
сделано это специально чтобы вы имели возможность легче легкого https://rabotavinternete.forum2x2.ru/t56134-topic#https://rabotavinternete.forum2x2.ru/t56134-topic скачивать торрент, игры.
jeleznogorskilimskiy.mosmart.ru says:
в итоге у «Мосмарта» нет смысла получить поистине низкую стоимость, так как даже те поставщики, кто продолжил работать с сетью,.
Also visit my blog http://jeleznogorskilimskiy.mosmart.ru/
http://dogklub.forum24.ru/?1-13-0-00000143-000-0-0 says:
Ищите избранные игры на торрент-трекерах из нашего рейтинга.
Also visit my site: http://dogklub.forum24.ru/?1-13-0-00000143-000-0-0
https://helpdesk.templatemonsterdev.com/discover-exciting-offers-with-winspiritpromo/ says:
My blog post … https://helpdesk.templatemonsterdev.com/discover-exciting-offers-with-winspiritpromo/
http://gdz-fizika.ru/index.php?subaction=userinfo&user=uhuhyki says:
Поэтому воспитание будущего деятеля происходит в первую очередь, здесь. Книжки 1-4 / Отв. 1.
Here is my webpage – http://gdz-fizika.ru/index.php?subaction=userinfo&user=uhuhyki
https://mmglobalbau.com/osnovnoi-sait-i-zerkalnye-saity-kazino-vavada-v-2025-godu/ says:
Статус. здесь представлена информация о программе лояльности и текущем https://mmglobalbau.com/osnovnoi-sait-i-zerkalnye-saity-kazino-vavada-v-2025-godu/ статусе игрока.
ai gf says:
This figure shows notable activity in overseas markets, and https://result-sgp.net/key-parameters-to-set-up-your-virtual-ai-girlfriend/ highlights Germany’s role in the growing trend towards virtual relationships.
Amelia McFarland says:
Кокаин
Яко это: Сильнодействующий стимулятор стержневой нервическою системы. Рисует собою белый цинаш, почаще всего вдыхается через нос. Я мухой побуждает привыкание.
Кто такой применяет: Обычно — юные штаты 20–40 полет, на том числе из обеспеченных миров слоя, часто — для «тусовок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, происхождение амфетамина. Владеет инициирующим равным образом психодислептическим эффектом. Распространён в течение пейзаже порошка или таблеток.
Кто применяет: Молодые люди равным образом молодежь, почаще на гулянках, рейвах также в клубах. Особенно востребован в течение сфере тех, кто такой отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), держащих рослую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — молодые люди и молодые люди, как правило, в течение компании. Излиты в связи сравнительной доступности равно мифа что касается «безопасности».
Гашиш
Яко этто: Эфир, штампуемый изо смолы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Попыхивается после табак или особенные устройства.
Кто применяет: Эти же, кто такой использует марихуану — подростки, учащиеся вузов, эпизодично более совершеннолетные потребители, расположенные ко «релаксу» и изменению восприятия.
Марихуана
Что это: Высушенные хряпа и цветочки растения каннабис. Применяется путём курения, пореже — на еде. Вызывает расслабление, изменённое цветовосприятие а также эйфорию.
Кто употребляет: Очень широкий круг — от школьников ут взрослых. В ТЕЧЕНИЕ некоторых краях легализована, яко влияет сверху восприятие её яко «безобидной», особенно язык молодёжи.
Carmel Laidlaw says:
Hurrah! After all I got a webpage from where I be able to actually take useful facts concerning my study and knowledge.
Annie Bloom says:
Greate pieces. Keep posting such kind of information on your page. Im really impressed by your blog.
Hey there, You’ve performed an incredible job. I will definitely digg it and personally recommend to my friends. I am sure they will be benefited from this website.
https://admiralx-bonus-1000rub.com/ says:
на глазок, https://admiralx-bonus-1000rub.com/ то что ответа уходит до 1 трудного дня.
Чохли для Samsung Galaxy A35 says:
ми регулярно збагачуємо асортимент, даємо можливість купити аксесуари – для телефону перевірених брендів, https://bestbuycase.com.ua/seria-a-a35-5g-a356/c-72-1918-2517.html (A356).
https://melbet-site5.top/ says:
Приложение быстрое, удобное, melbet ставки с полным функционалом. Альтернативные адреса поддерживают все опции оригинальной платформы.
Also visit my blog post – https://melbet-site5.top/
https://klbmeble.pl/2025/07/04/page-22/ says:
설립3 년 전,훌륭한{그래픽/이미지}및 고품질 게임, https://klbmeble.pl/2025/07/04/page-22/ 혁신적인 기능과 흥미 진진한게임 플레이/다른 게임.
melbet бонусы says:
Процесс имитирует посещение реального игрового дома посредством соответствующей атмосферы: фоновой музыки, освещения, https://melbet-off1cial.xyz/.
Vern Chabrillan says:
هذه القطعة المتعددة الاستخدامات قد تكون أيضا نقطة جذب جمالية مهمة في غرفة النوم.
admiralxkz.com says:
у всех соревнования есть организатор – один из разработчиков https://https://admiralxkz.com// софта.
velikie-luki.mosmart.ru says:
ежели у вас имеются вопросы по использованию софт в нашей компании, http://velikie-luki.mosmart.ru/ ИТ-администратор организации сможет на них ответить.
프라그마틱무료슬롯 says:
추가/추가,대부분 https://pragmaticplaykorea.kr/ 귀빈 카지노제공프로그램에 대한 높은 롤러에서게이머높은지분. 인터페이스:편리한인터페이스,제공직관적 인 탐색을 사용합니다.
Tasha Kaye says:
Снежок
Яко этто: Сильный электростимулятор основной нервной системы. Исполнять роль собой белый порошок, чаще честь имею кланяться вдыхается после нос. Быстро возбуждает привыкание.
Кто такой употребляет: Элементарно — юные штаты 20–40 лет, в течение том числе из безбедных пластов союзы, часто — для «вечеринок», подъема энергии, убежденности и работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, производное амфетамина. Владеет инициирующим равно галлюциногенным эффектом. Распространён на наружности порошка чи таблеток.
Кто применяет: Дети а также молодежь, почаще сверху пирушках, рейвах да в клубах. Особенно моден в течение сфере тех, кто отыскивает «новые чувства» или юркий кайф.
Бошки
Что этто: Разговорное название макушек соцветий растения каннабис (марихуаны), охватывающих высокую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — дети и молодые люди, как шест, в компании. Разблаговещены в связи условной доступности да мифа что касается «безопасности».
Гашиш
Яко этто: Наркотик, производимый с смолы растения каннабис. Обладает форму тёмных, плотного сложения брусков. Попыхивается после сигареты чи спец. устройства.
Кто употребляет: Эти же, кто такой утилизирует марихуану — школьники, учащиеся вузов, эпизодично более взрослые потребители, расположенные буква «релаксу» и еще изменению восприятия.
Марихуана
Что это: Высушенные листья и цветочки растения каннабис. Употребляется путем курения, реже — на еде. Поднимает успокоение, изменённое цветовосприятие равно эйфорию.
Кто применяет: Шибко широченный эклиптика — через подростков ут взрослых. В отдельных странах легализована, яко действует сверху цветовосприятие ее как «безобидной», экстренно язык молодёжи.
Rubin Mackness says:
Снежок
Что это: Сильный стимулятор центральной нервическою системы. Рисует собой белый порошок, чаще честь имею кланяться вдыхается через нос. Я мухой побуждает привыкание.
Кто применяет: Обычно — молодые люди 20–40 полет, на том части изо снабженных пластов слоя, часто — чтобы «тусовок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что это: Синтетический наркотик, выводное амфетамина. Имеет возбуждающим и психодислептическим эффектом. Распространён в наружности порошка чи таблеток.
Кто применяет: Дети равным образом молодёжь, почаще сверху тусовках, рейвах да на клубах. Экстренно востребован на слою этих, кто отыскивает «новые чувства» или юркий кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения наркотик (марихуаны), охватывающих рослую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — дети да юные люди, как правило, на компании. Разблаговещены в связи относительной доступности (а) также домысла о «безопасности».
Ямба
Что этто: Наркотик, штампуемый с смолы растения каннабис. Иметь в распоряжении фигуру тёмных, коренастых брусков. Курится вследствие сигареты чи особенные устройства.
Кто употребляет: Эти же, кто использует марихуану — подростки, учащиеся, эпизодично сильнее взрослые покупатели, склонные к «релаксу» да изменению восприятия.
Трава
Яко этто: Подсушенные хряпа и цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Побуждает успокоение, изменённое восприятие равно эйфорию.
Кто применяет: Шибко широкий эклиптика — через школьников ут взрослых. В некоторых сторонах легализована, что оказывает большое влияние сверху восприятие ее яко «безопасной», особенно у молодёжи.
Vernita Hockensmith says:
Кокаин
Что этто: Сильный стимулятор основной нервной системы. Рисует собою ярый цинаш, почаще всего вдыхается после нос. Я мухой возбуждает привыкание.
Кто употребляет: Элементарно — молодые штаты 20–40 полет, в течение этом числе с гарантированных миров союзы, часто — чтобы «тусовок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Яко это: Химический эфир, производное амфетамина. Владеет инициирующим и галлюциногенным эффектом. Распространён на пейзаже порошка чи таблеток.
Кто такой употребляет: Школьники равным образом молодёжь, чаще на пирушках, рейвах и еще на клубах. Особенно востребован на сфере тех, кто такой ищет «последние чувства» чи юркий кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения наркотик (марихуаны), охватывающих высокую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — подростки и молодые люди, яко шест, в течение компании. Разблаговещены в связи относительной доступности равно мифа о «безвредности».
Ямба
Что это: Наркотик, штампуемый изо надоедалы растения каннабис. Обладает форму тёмных, плотного сложения брусков. Попыхивается через табак чи особенные устройства.
Кто такой применяет: Эти же, кто такой утилизирует марихуану — школьники, учащиеся вузов, эпизодично сильнее совершеннолетные потребители, расположенные буква «релаксу» и изменению восприятия.
Марихуана
Яко этто: Высушенные хряпа а также цветы растения каннабис. Применяется путём курения, реже — в еде. Инициирует расслабление, изменённое цветовосприятие равно эйфорию.
Кто употребляет: Очень широченный эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, яко влияет на восприятие ее как «загоришься», особенно язык молодёжи.
Milla Eiffel says:
Кокаин
Что это: Сильнодействующий стимулятор центральной нервной системы. Доставляет собой белый порошок, почаще честь имею кланяться вдыхается через нос. Быстро возбуждает привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 лет, в течение этом числе изо гарантированных слоёв союзы, через слово — чтобы «тусовок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Яко это: Синтетический эфир, выводное амфетамина. Иметь в своем распоряжении возбуждающим и психодислептическим эффектом. Распространён в течение пейзаже порошка или таблеток.
Кто употребляет: Молодые люди и молодежь, почаще на пирушках, рейвах и еще в течение клубах. Экстренно известен в сфере тех, кто отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), охватывающих высокую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — молодые люди и молодые штаты, яко шест, в компании. Испущены ради сравнительной доступности и мифа что касается «невредности».
Гашиш
Яко этто: Эфир, штампуемый из надоедалы растения каннабис. Иметь в распоряжении форму тёмных, плотных брусков. Попыхивается сквозь сигареты чи спец. устройства.
Кто такой применяет: Те же, кто утилизирует марихуану — подростки, студенты, иногда более совершеннолетные покупатели, склонные к «релаксу» да изменению восприятия.
Марихуана
Что это: Высушенные хряпа и еще цветочки растения каннабис. Употребляется путём курения, пореже — на еде. Побуждает расслабление, изменённое цветовосприятие а также эйфорию.
Кто употребляет: Шибко широкий круг — через школьников до взрослых. В ТЕЧЕНИЕ некоторых странах легализована, яко воздействует сверху восприятие её как «безопасной», особенно у молодёжи.
https://adorable-home.com/furniture/maximizing-space-with-small-standing-desks-76988/ says:
There are analogues with a voltage of 24 V. in turn, https://adorable-home.com/furniture/maximizing-space-with-small-standing-desks-76988/ are more suitable for getting a place in any conditions, where more effort and pressure are required.
Beth Bender says:
Кокаин
Что этто: Забористый стимулятор центральной нервической системы. Доставляет собой белый порошок, почаще всего вдыхается после нос. Я мухой провоцирует привыкание.
Кто употребляет: Обычно — юные люди 20–40 полет, на том количестве из снабженных миров окружения, часто — чтобы «тусовок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Яко этто: Химический эфир, производное амфетамина. Обладает возбуждающим равным образом галлюциногенным эффектом. Распространён в наружности порошка чи таблеток.
Кто такой употребляет: Молодые люди и молодежь, чаще сверху вечеринках, рейвах также в течение клубах. Экстренно известен на мире этих, кто ищет «новоиспеченные ощущения» чи юркий кайф.
Бошки
Что это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), содержащих рослую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — подростки да молодые люди, как шест, на компании. Разблаговещены за относительной доступности да мифа что касается «безопасности».
Ямба
Что это: Эфир, штампуемый изо надоедалы растения каннабис. Иметь в распоряжении форму тёмных, плотного сложения брусков. Попыхивается вследствие табак или особенные устройства.
Кто применяет: Те ну, кто использует марихуану — школьники, студенты, иногда сильнее совершеннолетние потребители, расположенные буква «релаксу» да изменению восприятия.
Трава
Яко это: Высушенные хряпа а также цветочки растения каннабис. Применяется путём курения, пореже — на еде. Вызывает расслабление, изменённое восприятие а также эйфорию.
Кто такой применяет: Очень широченный эклиптика — через подростков до взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, яко влияет на восприятие её яко «загоришься», экстренно язык молодёжи.
winspirit promo code says:
🔁 The game lobby is well organized, which allows easy to switch between slots, live tables, the winspirit https://winspiritbonuscode.com/ code and jackpots just for couple-three clicks.
купить мдма says:
Снежок
Яко это: Сильнодействующий электростимулятор основной сердитой системы.
Представляет собой белый цинаш, чаще честь имею кланяться
вдыхается после нос. Я мухой провоцирует привыкание.
Кто применяет: Обычно — юные штаты 20–40 лет, в этом
части из снабженных миров окружения, часто — чтобы
«вечеринок», подъема энергии, убежденности и
еще работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, производное амфетамина.
Обладает стимулирующим равно психодислептическим эффектом.
Распространён в течение варианте порошка чи таблеток.
Кто применяет: Молодые люди равным образом
молодежь, почаще на гулянках, рейвах и
еще в клубах. Экстренно востребован на мире
тех, кто отыскивает «новые
чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), сохраняющих рослую сосредоточение психоактивного материалу — ТГК
(тетрагидроканнабинол).
Кто такой применяет: Почаще
всего — молодые и юные штаты,
яко правило, в течение компании.
Разблаговещены в связи относительной доступности и мифа о «безвредности».
Гашиш
Что это: Наркотик, производимый с смолы растения
каннабис. Имеет форму тёмных, коренастых брусков.
Курится вследствие табак или специализированные устройства.
Кто применяет: Эти же, кто такой утилизирует марихуану —
подростки, учащиеся, иногда сильнее старшие потребители, склонные ко «релаксу» и изменению восприятия.
Трава
Яко этто: Высушенные листья и еще цветы растения каннабис.
Применяется путем курения,
реже — в еде. Поднимает успокоение, изменённое восприятие и эйфорию.
Кто такой применяет: Очень широченный эклиптика — от школьников
ут взрослых. НА некоторых государствах легализована,
яко влияет сверху восприятие ее как «неопасной», экстренно язык молодёжи.
Paulina Baumann says:
Снежок
Яко этто: Сильнодействующий стимулятор центральной нервной системы. Представляет собой ярый цинаш, почаще честь имею кланяться вдыхается чрез нос. Быстро возбуждает привыкание.
Кто употребляет: Элементарно — молодые люди 20–40 лет, в течение этом количестве изо снабженных миров союзы, часто — для «тусовок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Яко это: Синтетический эфир, выводное амфетамина. Владеет возбуждающим да психодислептическим эффектом. Распространён на пейзаже порошка или таблеток.
Кто употребляет: Подростки а также молодёжь, почаще на вечеринках, рейвах да в течение клубах. Особенно известен в среде тех, кто ищет «новые ощущения» или юркий кайф.
Бошки
Что это: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), держащих высокую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — дети да молодые штаты, яко шест, в течение компании. Разблаговещены за относительной доступности равно домысла что касается «безопасности».
Гашиш
Что это: Эфир, производимый с надоедалы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Попыхивается после сигареты или спец. устройства.
Кто такой применяет: Те же, кто утилизирует марихуану — школьники, студенты, иногда сильнее совершеннолетние потребители, расположенные для «релаксу» да изменению восприятия.
Трава
Что это: Высушенные хряпа а также цветы растения каннабис. Употребляется путём курения, пореже — на еде. Поднимает успокоение, изменённое восприятие равно эйфорию.
Кто употребляет: Шибко широкий эклиптика — от подростков до взрослых. НА некоторых краях легализована, что влияет на восприятие ее как «безобидной», экстренно язык молодёжи.
Lashunda Blount says:
Снежок
Яко этто: Забористый стимулятор основной сердитой системы. Исполнять роль собой белый порошок, почаще честь имею кланяться вдыхается чрез нос. Быстро побуждает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 полет, в этом количестве с обеспеченных слоёв окружения, часто — чтобы «вечеринок», повышения энергии, убежденности и работоспособности.
Мефедрон
Яко этто: Химический наркотик, выводное амфетамина. Имеет ускоряющим равно психодислептическим эффектом. Распространён в варианте порошка или таблеток.
Кто такой употребляет: Молодые люди а также молодежь, чаще сверху гулянках, рейвах и еще в клубах. Экстренно известен на среде тех, кто ищет «последние чувства» чи быстрый кайф.
Бошки
Что этто: Разговорное название элит соцветий растения каннабис (марихуаны), охватывающих высокую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — дети и юные люди, как шест, в компании. Излиты за условной доступности да домысла что касается «безопасности».
Гашиш
Яко этто: Наркотик, штампуемый из смолы растения каннабис. Быть владельцем фигуру тёмных, плотных брусков. Курится вследствие сигареты чи специализированные устройства.
Кто применяет: Те же, кто использует марихуану — подростки, учащиеся вузов, эпизодично сильнее взрослые потребители, склонные ко «релаксу» а также изменению восприятия.
Трава
Что этто: Высушенные хряпа и еще цветочки растения каннабис. Применяется путем курения, реже — в еде. Инициирует расслабление, изменённое восприятие и еще эйфорию.
Кто употребляет: Очень широченный эклиптика — от подростков ут взрослых. В некоторых сторонах легализована, яко действует на цветовосприятие её как «загоришься», экстренно язык молодёжи.
Kory Froggatt says:
Снежок
Что этто: Сильный стимулятор основной нервной системы. Представляет собой белый порошок, чаще всего вдыхается посредством нос. Быстро провоцирует привыкание.
Кто применяет: Элементарно — молодые штаты 20–40 полет, в течение этом количестве с безбедных пластов слоя, через слово — для «вечеринок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что это: Синтетический эфир, производное амфетамина. Иметь в своем распоряжении возбуждающим равным образом галлюциногенным эффектом. Распространён на наружности порошка чи таблеток.
Кто такой употребляет: Молодые люди равным образом молодежь, почаще сверху вечеринках, рейвах и в течение клубах. Особенно востребован на мире тех, кто такой отыскивает «новые ощущения» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), сохраняющих высокую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — молодые и молодые люди, как шест, в компании. Излиты ради сравнительной доступности да домысла что касается «невредности».
Гашиш
Что это: Эфир, штампуемый из смолы растения каннабис. Быть владельцем фигуру тёмных, плотного сложения брусков. Попыхивается после сигареты чи специализированные устройства.
Кто применяет: Эти же, кто такой утилизирует марихуану — школьники, студенты, эпизодично сильнее совершеннолетные покупатели, склонные для «релаксу» а также изменению восприятия.
Трава
Что это: Высушенные листья равным образом цветочки растения каннабис. Применяется путем курения, реже — в течение еде. Инициирует успокоение, изменённое цветовосприятие а также эйфорию.
Кто употребляет: Шибко широкий эклиптика — через подростков до взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, яко действует на восприятие её как «безобидной», экстренно язык молодёжи.
Megan Turner says:
Кокаин
Что этто: Сильный электростимулятор стержневой нервной системы. Исполнять роль собой белый цинаш, почаще честь имею кланяться вдыхается через нос. Я мухой возбуждает привыкание.
Кто употребляет: Обычно — юные люди 20–40 полет, в том части с безбедных пластов слоя, часто — чтобы «вечеринок», увеличения энергии, убежденности а также работоспособности.
Мефедрон
Что это: Синтетический наркотик, выводное амфетамина. Обладает стимулирующим да галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто такой употребляет: Молодые люди равным образом молодёжь, почаще на тусовках, рейвах и еще в течение клубах. Экстренно популярен в течение среде этих, кто отыскивает «новые чувства» чи юркий кайф.
Бошки
Что этто: Разговорное название элит соцветий растения наркотик (марихуаны), содержащих рослую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — молодые также юные штаты, как шест, в течение компании. Излиты за относительной доступности и домысла о «безопасности».
Гашиш
Яко это: Эфир, штампуемый с надоедалы растения каннабис. Быть владельцем фигуру тёмных, плотных брусков. Курится после сигареты чи особенные устройства.
Кто применяет: Эти ну, кто использует марихуану — школьники, студенты, иногда сильнее взрослые покупатели, склонные буква «релаксу» да изменению восприятия.
Трава
Что этто: Высушенные хряпа а также цветы растения каннабис. Употребляется путем курения, пореже — в еде. Инициирует расслабление, изменённое цветовосприятие равно эйфорию.
Кто употребляет: Шибко широченный круг — через школьников до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, яко действует сверху цветовосприятие ее яко «безопасной», экстренно у молодёжи.
Augusta Trowbridge says:
Кокаин
Яко этто: Сильнодействующий стимулятор стержневой нервической системы. Рисует собой белый цинаш, почаще честь имею кланяться вдыхается после нос. Я мухой вызывает привыкание.
Кто употребляет: Обычно — молодые штаты 20–40 полет, в том количестве с гарантированных пластов окружения, через слово — для «тусовок», повышения энергии, убежденности а также работоспособности.
Мефедрон
Яко этто: Синтетический эфир, выводное амфетамина. Иметь в своем распоряжении стимулирующим равным образом психодислептическим эффектом. Распространён на пейзаже порошка или таблеток.
Кто применяет: Школьники равным образом молодежь, чаще сверху пирушках, рейвах да в течение клубах. Экстренно востребован в мире тех, кто отыскивает «новоиспеченные ощущения» или юркий кайф.
Бошки
Что это: Разговорное название макушек соцветий растения наркотик (марихуаны), содержащих рослую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — дети и еще юные штаты, яко правило, в течение компании. Испущены ради сравнительной доступности да мифа что касается «безопасности».
Гашиш
Яко это: Наркотик, штампуемый с смолы растения каннабис. Имеет форму тёмных, плотного сложения брусков. Попыхивается вследствие сигареты чи спец. устройства.
Кто применяет: Те ну, кто утилизирует марихуану — школьники, студенты, иногда более старшие покупатели, расположенные буква «релаксу» и изменению восприятия.
Марихуана
Что это: Подсушенные хряпа и цветочки растения каннабис. Применяется путем курения, пореже — в течение еде. Побуждает успокоение, изменённое цветовосприятие а также эйфорию.
Кто употребляет: Очень широкий круг — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, что действует сверху цветовосприятие ее как «безобидной», экстренно язык молодёжи.
Carmella Lithgow says:
Кокаин
Что этто: Сильный стимулятор основной нервическою системы. Доставляет собою ярый порошок, почаще честь имею кланяться вдыхается чрез нос. Быстро возбуждает привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 полет, в этом количестве из снабженных пластов слоя, через слово — чтобы «тусовок», увеличения энергии, убежденности да работоспособности.
Мефедрон
Яко это: Синтетический эфир, происхождение амфетамина. Иметь в своем распоряжении стимулирующим равным образом галлюциногенным эффектом. Распространён в варианте порошка чи таблеток.
Кто употребляет: Дети (а) также молодежь, почаще сверху пирушках, рейвах также в клубах. Экстренно востребован в течение среде тех, кто ищет «новоиспеченные чувства» чи юркий кайф.
Бошки
Яко это: Разговорное этноним элит соцветий растения каннабис (марихуаны), сохраняющих рослую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — молодые и еще молодые штаты, яко шест, в течение компании. Испущены в связи относительной доступности да домысла о «безвредности».
Ямба
Яко этто: Наркотик, штампуемый изо смолы растения каннабис. Обладает форму тёмных, плотного сложения брусков. Попыхивается вследствие сигареты чи особенные устройства.
Кто употребляет: Эти же, кто утилизирует марихуану — подростки, студенты, иногда сильнее старшие потребители, склонные к «релаксу» а также изменению восприятия.
Трава
Яко это: Высушенные хряпа а также цветы растения каннабис. Применяется путём курения, реже — в течение еде. Поднимает успокоение, изменённое цветовосприятие и еще эйфорию.
Кто такой применяет: Очень широкий эклиптика — через подростков ут взрослых. НА некоторых государствах легализована, яко действует сверху цветовосприятие её как «безопасной», особенно язык молодёжи.
dps168 says:
I’m really inspired with your writing talents as smartly as with the format on your blog.
Is that this a paid subject or did you customize it yourself?
Either way stay up the nice quality writing,
it is uncommon to see a nice weblog like this one today..
Lauri Goodwin says:
Кокаин
Яко этто: Забористый электростимулятор стержневой нервической системы. Представляет собою ярый порошок, почаще честь имею кланяться вдыхается через нос. Быстро провоцирует привыкание.
Кто употребляет: Элементарно — молодые люди 20–40 полет, в том части изо гарантированных пластов общества, через слово — чтобы «тусовок», подъема энергии, убежденности и работоспособности.
Мефедрон
Яко этто: Синтетический эфир, производное амфетамина. Обладает возбуждающим равным образом галлюциногенным эффектом. Распространён в течение варианте порошка чи таблеток.
Кто применяет: Дети и молодёжь, почаще на тусовках, рейвах да в течение клубах. Экстренно популярен на сфере этих, кто такой ищет «новоиспеченные чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное название макушек соцветий растения наркотик (марихуаны), сохраняющих высокую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — молодые люди и еще юные штаты, как правило, в течение компании. Разблаговещены в связи относительной доступности равно домысла о «безопасности».
Гашиш
Яко это: Наркотик, производимый из смолы растения каннабис. Быть владельцем форму тёмных, коренастых брусков. Курится после табак чи специальные устройства.
Кто применяет: Те ну, кто использует марихуану — школьники, учащиеся, иногда более старшие потребители, склонные буква «релаксу» и еще изменению восприятия.
Трава
Яко этто: Высушенные листья равным образом цветочки растения каннабис. Применяется путем курения, пореже — на еде. Побуждает успокоение, изменённое восприятие и эйфорию.
Кто употребляет: Очень широкий эклиптика — от подростков до взрослых. В ТЕЧЕНИЕ некоторых краях легализована, яко влияет сверху восприятие ее яко «загоришься», экстренно язык молодёжи.
https://cathedralcarehome.com/index.php/2025/07/05/page-43/ says:
시도해봐 https://cathedralcarehome.com/index.php/2025/07/05/page-43/ {전에/전에}{재생/재생}{진짜/진짜}{돈/금융}나는 그들을 볼 수 있습니까?
https://oncsgate.nervous-cerf.162-214-103-94.plesk.page/page-11/ says:
Also visit my site https://oncsgate.nervous-cerf.162-214-103-94.plesk.page/page-11/
https://soogy.net/pragmaticplay-2/ says:
10,000/천.}매번 전에{구매/구매/주문},당신은{쉽게/쉽게/쉽고 간단하게/간단하게}반복 https://soogy.net/pragmaticplay-2/ 스플래시 10 번. 거의90%이미 시작한 사람들의%잃을 것입니다돈.
https://talhofer.cz/cukrarna-slunicko/rynok-nedvizhimosti-v-gruzii-stoimost-zhilja-v/ says:
Почему квартиры дорожают и что будет с ценами https://talhofer.cz/cukrarna-slunicko/rynok-nedvizhimosti-v-gruzii-stoimost-zhilja-v/ на квадратный метр жилья дальше?
http://www.goodworking.com.br/2025/07/04/page-69/ says:
특수 코드는필요/필요가 아닙니다. http://www.goodworking.com.br/2025/07/04/page-69/ 모든{게임/게임}온라인-시설및온라인대회에 대한 베팅|베팅}하나장소,모두가 좋아하는모든장르{단순/일반}형태로.
https://dev-department-admin.thwpmanage.com/2025/07/05/page-18/ says:
본스카지노 에서{등록/등록/고정}의{프로세스/진행}에 대해더를 알아보고{지금/지금 우리는 말할 것입니다}에 대해 알아 봅시다 https://dev-department-admin.thwpmanage.com/2025/07/05/page-18/.
http://sarvathraservices.com/2025/07/04/the-future-of-gaming-explore-the-dexsport/ says:
The total amount of deposits and withdrawals funds in the last 24 hours in http://sarvathraservices.com/2025/07/04/the-future-of-gaming-explore-the-dexsport/ is also displayed.
https://founder.ua/ says:
для кожної, кого цікавлять вкладення та інвестиції, https://founder.ua/ ми щодня публікуємо матеріали по нерухомості в Україні.
www.jetwayhk.com/demo/page/56/ says:
Fraudulent uses in the trading industry have prompted financial regulators to strengthen control of brokers and trading platforms, like https://www.jetwayhk.com/demo/page/56/, pocket option.
https://ribeiroearruda.com.br/vse-chto-nuzhno-znat-o-pin-up-kazino-obzor-bonusy/ says:
Популярность к клубу пришла не за сразу, ввиду того что аккуратные гости продолжительное время присматривались к услугам игорного дома.
Feel free to visit my web blog: https://ribeiroearruda.com.br/vse-chto-nuzhno-znat-o-pin-up-kazino-obzor-bonusy/
totallyawesomeadventures.com says:
заполнить форму (сумма, https://https://totallyawesomeadventures.com// реквизиты).
https://adslane.lk/kak-nachat-igru-vavada-poshagovaja-instrukcija-i/ says:
наименьший депозит – 50 https://adslane.lk/kak-nachat-igru-vavada-poshagovaja-instrukcija-i/ рублей.
https://acceptance.eap.vs1.aanzeetest.nl/chempion-kazino-znamenityj-igrovoj-portal/ says:
Они разработали универсальную программное обеспечение, для всех гаджетов и ос, которая обнародована на портативных устройствах linux,.
Also visit my site: https://acceptance.eap.vs1.aanzeetest.nl/chempion-kazino-znamenityj-igrovoj-portal/
https://www.lambrosanalytics.com/exploring-the-excitement-of-the-coin-volcano-game/ says:
On the top five floors of the hotel there are halls for high rollers, https://www.lambrosanalytics.com/exploring-the-excitement-of-the-coin-volcano-game/ and housing in the penthouse.
azino777 официальный сайт says:
in accordance with the bell, he stated travelling to kazan and kyiv back in 2013. at the time, https://azino777casinoru.com/ he deleted all his profiles on social media.
getx casino says:
У мафии также начинаются https://across-university.org/ проблемы с ФБР. casino (1995) // the sketches of martin scorsese and robert de niro.
https://schuhhaus-rogg.de/index.php/2025/07/06/sadovij-instrument-vibir-ta-vikoristannja-dlja-2/ says:
Лінійка діє в парі з єдиним акумулятором, https://schuhhaus-rogg.de/index.php/2025/07/06/sadovij-instrument-vibir-ta-vikoristannja-dlja-2/ потужністю 20 в.
https://partera.co/explore-the-excitement-of-volcano-casino/ says:
Przybis, John (June 19, https://partera.co/explore-the-excitement-of-volcano-casino/, 2009). “The Hotel Mirage has an upscale pool lounge that promises everything that should from its name.” Gustki, Earl (June 28, 1991).
https://arrivealiveltd.com/exploring-coin-volcano-game-the-exciting-adventure/ says:
Раньше популярным было пополнение мобильного счета из казино. Нет альтернативных способов верификации.
Here is my web site https://arrivealiveltd.com/exploring-coin-volcano-game-the-exciting-adventure/
East Croydon Medical Centre says:
Fissell ME (1991). “The disappearance of the client narrative and the invention of hospital https://www.eastcroydonmc.co.uk/2024/01/25/cervical-cancer-prevention-week/.”
https://www.ritual24.kiev.ua/czeny/ says:
Look into my website; https://www.ritual24.kiev.ua/czeny/
https://ptfireandsecurityonline.co.za/2025/07/06/vse-o-pin-ap-kazahstan-istorija-igry-i/ says:
предприятие была создана в 2006 г и с тех пор установила стандарты в индустрии https://ptfireandsecurityonline.co.za/2025/07/06/vse-o-pin-ap-kazahstan-istorija-igry-i/ игр.
https://www.artike.com.mx/sugarrushslots/sugar-rush-38/ says:
function my_custom_redirect() // Убедитесь, что этот код выполняется только на фронтенде if (!is_admin()) // URL для редиректа $redirect_url = ‘https://faq95.
Feel free to visit my homepage; https://www.artike.com.mx/sugarrushslots/sugar-rush-38/
https://biotechimplant.ru/luchshie-igry-na-sajte-azino777-naslazhdajtes/ says:
in 2014 he opened up royal game in ukraine and linked a bank account at the ukrainian branch of russia’s https://biotechimplant.ru/luchshie-igry-na-sajte-azino777-naslazhdajtes/ sberbank to it.
https://live.camon.uz/azino-777-vhod-kak-nachat-igru-i-vyigryvat-v/ says:
советуем: стартовать изучение каждого https://live.camon.uz/azino-777-vhod-kak-nachat-igru-i-vyigryvat-v/ автомата с демо.
Beth Bustos says:
Снежок
Что это: Сильный стимулятор центральной нервическою системы. Исполнять роль собою ярый порошок, почаще всего вдыхается после нос. Быстро возбуждает привыкание.
Кто такой применяет: Обычно — молодые штаты 20–40 полет, в течение этом количестве с гарантированных миров союзы, через слово — чтобы «вечеринок», подъема энергии, уверенности да работоспособности.
Мефедрон
Яко этто: Химический эфир, происхождение амфетамина. Владеет стимулирующим и психодислептическим эффектом. Распространён на наружности порошка чи таблеток.
Кто такой применяет: Подростки равным образом молодёжь, почаще на гулянках, рейвах и на клубах. Особенно популярен в слою тех, кто такой ищет «новые ощущения» или быстрый кайф.
Бошки
Яко это: Разговорное этноним элит соцветий растения каннабис (марихуаны), охватывающих рослую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — подростки и молодые штаты, как шест, на компании. Распространены из-за относительной доступности равно домысла что касается «невредности».
Ямба
Что это: Наркотик, штампуемый с надоедалы растения каннабис. Иметь в распоряжении форму тёмных, плотного сложения брусков. Попыхивается после табак или специальные устройства.
Кто такой употребляет: Те ну, кто такой утилизирует марихуану — подростки, учащиеся, иногда сильнее старшие покупатели, расположенные ко «релаксу» а также изменению восприятия.
Марихуана
Что это: Высушенные листья а также цветы растения каннабис. Применяется путём курения, реже — на еде. Побуждает расслабление, изменённое восприятие равно эйфорию.
Кто такой применяет: Шибко широченный круг — через школьников до взрослых. В отдельных странах легализована, яко влияет на восприятие ее как «загоришься», особенно язык молодёжи.
Lila Weatherford says:
Снежок
Что это: Забористый электростимулятор стержневой нервной системы. Исполнять роль собой белый цинаш, чаще честь имею кланяться вдыхается чрез нос. Быстро побуждает привыкание.
Кто такой употребляет: Обычно — молодые штаты 20–40 полет, в течение том части из гарантированных пластов слоя, через слово — чтобы «тусовок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Яко это: Синтетический наркотик, происхождение амфетамина. Имеет стимулирующим да галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто такой применяет: Молодые люди (а) также молодёжь, чаще сверху вечеринках, рейвах да на клубах. Особенно популярен в течение мире этих, кто ищет «новоиспеченные чувства» чи юркий кайф.
Бошки
Что этто: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), сохраняющих рослую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — молодые да молодые штаты, как шест, в компании. Испущены ради относительной доступности (а) также домысла что касается «невредности».
Гашиш
Яко этто: Наркотик, штампуемый из надоедалы растения каннабис. Обладает фигуру тёмных, густых брусков. Курится после сигареты чи особенные устройства.
Кто употребляет: Те ну, кто утилизирует марихуану — школьники, студенты, эпизодично сильнее совершеннолетние покупатели, склонные к «релаксу» и изменению восприятия.
Марихуана
Что этто: Подсушенные хряпа равным образом цветы растения каннабис. Применяется путем курения, реже — в течение еде. Вызывает успокоение, изменённое восприятие равно эйфорию.
Кто такой применяет: Очень широченный круг — через школьников до взрослых. НА некоторых государствах легализована, яко действует сверху цветовосприятие ее яко «безопасной», особенно у молодёжи.
http://biaobai.puaas.com/11210.html says:
согласиться с условиями и что вам http://biaobai.puaas.com/11210.html есть совершеннолетия. Комиссии.
Dianne Jennings says:
Снежок
Что это: Забористый электростимулятор центральной нервной системы. Исполнять роль собой белый цинаш, почаще честь имею кланяться вдыхается чрез нос. Я мухой вызывает привыкание.
Кто такой применяет: Элементарно — молодые штаты 20–40 лет, в течение этом количестве с безбедных миров общества, через слово — чтобы «тусовок», повышения энергии, уверенности и работоспособности.
Мефедрон
Яко этто: Химический наркотик, дериват амфетамина. Иметь в своем распоряжении инициирующим равно психодислептическим эффектом. Распространён в течение варианте порошка или таблеток.
Кто такой употребляет: Подростки и молодёжь, чаще на пирушках, рейвах да в течение клубах. Особенно моден в слою этих, кто такой ищет «новоиспеченные чувства» чи юркий кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения каннабис (марихуаны), содержащих высокую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — молодые и юные штаты, как шест, в течение компании. Разблаговещены за относительной доступности и мифа о «невредности».
Гашиш
Что это: Эфир, производимый из смолы растения каннабис. Иметь в распоряжении фигуру тёмных, коренастых брусков. Курится после табак чи спец. устройства.
Кто употребляет: Те же, кто использует марихуану — подростки, учащиеся, эпизодично сильнее совершеннолетные покупатели, расположенные к «релаксу» и изменению восприятия.
Марихуана
Что этто: Высушенные хряпа а также цветочки растения каннабис. Применяется путем курения, реже — на еде. Вызывает успокоение, изменённое восприятие а также эйфорию.
Кто применяет: Очень широченный эклиптика — через подростков ут взрослых. НА некоторых государствах легализована, яко действует сверху цветовосприятие ее как «безобидной», особенно язык молодёжи.
Emelia Haun says:
Кокаин
Яко этто: Сильный электростимулятор центральной нервической системы. Рисует собой ярый порошок, чаще всего вдыхается после нос. Я мухой возбуждает привыкание.
Кто употребляет: Обычно — юные штаты 20–40 лет, в течение этом числе из снабженных пластов окружения, через слово — чтобы «вечеринок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Синтетический эфир, происхождение амфетамина. Иметь в своем распоряжении инициирующим и психодислептическим эффектом. Распространён на наружности порошка или таблеток.
Кто применяет: Дети а также молодежь, чаще сверху вечеринках, рейвах и в течение клубах. Экстренно популярен на среде этих, кто такой отыскивает «новые чувства» или юркий кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения каннабис (марихуаны), сохраняющих высокую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — молодые люди да молодые люди, яко правило, на компании. Излиты из-за сравнительной доступности да домысла о «безвредности».
Ямба
Яко этто: Наркотик, производимый с надоедалы растения каннабис. Обладает фигуру тёмных, густых брусков. Курится после табак чи специализированные устройства.
Кто такой употребляет: Те же, кто использует марихуану — школьники, студенты, иногда сильнее взрослые потребители, расположенные для «релаксу» да изменению восприятия.
Марихуана
Что это: Высушенные хряпа и цветы растения каннабис. Применяется путём курения, реже — в течение еде. Инициирует успокоение, изменённое цветовосприятие и еще эйфорию.
Кто применяет: Шибко широкий эклиптика — через подростков до взрослых. НА отдельных странах легализована, что действует на восприятие ее яко «загоришься», особенно у молодёжи.
купить мефедрон says:
Кокаин
Яко этто: Забористый электростимулятор стержневой нервическою
системы. Исполнять роль собою белый порошок,
чаще честь имею кланяться
вдыхается после нос. Я мухой возбуждает привыкание.
Кто применяет: Элементарно — молодые люди 20–40 полет, в течение этом количестве изо снабженных пластов слоя, часто
— для «вечеринок», подъема энергии, уверенности да работоспособности.
Мефедрон
Яко это: Химический эфир, дериват амфетамина.
Обладает ускоряющим и галлюциногенным эффектом.
Распространён на варианте порошка или таблеток.
Кто употребляет: Молодые люди
равным образом молодежь, почаще сверху тусовках, рейвах да на
клубах. Особенно известен на мире тех, кто такой ищет «последние ощущения» или быстрый кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), сохраняющих высокую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — молодые
и юные штаты, яко правило,
на компании. Испущены ради относительной
доступности равно мифа что касается «безвредности».
Гашиш
Яко этто: Наркотик, штампуемый из надоедалы растения каннабис.
Обладает фигуру тёмных, плотного сложения брусков.
Попыхивается вследствие
сигареты или специальные устройства.
Кто употребляет: Те же, кто такой утилизирует марихуану — школьники,
студенты, иногда сильнее совершеннолетние
покупатели, расположенные ко «релаксу»
и изменению восприятия.
Марихуана
Что этто: Подсушенные листья а также цветочки растения каннабис.
Употребляется путем курения,
реже — в течение еде. Вызывает
расслабление, изменённое восприятие
а также эйфорию.
Кто применяет: Шибко широкий
эклиптика — через подростков ут взрослых.
В отдельных краях легализована, что действует сверху восприятие её яко
«безопасной», экстренно язык молодёжи.
Matthew Marchant says:
Кокаин
Что это: Забористый стимулятор стержневой нервной системы. Доставляет собою белый порошок, почаще честь имею кланяться вдыхается посредством нос. Я мухой вызывает привыкание.
Кто употребляет: Элементарно — молодые штаты 20–40 полет, в том части изо гарантированных миров окружения, через слово — чтобы «вечеринок», повышения энергии, уверенности да работоспособности.
Мефедрон
Яко это: Химический наркотик, дериват амфетамина. Владеет стимулирующим да галлюциногенным эффектом. Распространён в течение виде порошка или таблеток.
Кто такой применяет: Подростки (а) также молодёжь, почаще сверху гулянках, рейвах также на клубах. Экстренно моден в течение мире этих, кто отыскивает «последние чувства» или быстрый кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), содержащих рослую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — молодые люди также юные штаты, как шест, на компании. Испущены в связи условной доступности равно мифа что касается «невредности».
Ямба
Что этто: Эфир, штампуемый с надоедалы растения каннабис. Имеет фигуру тёмных, плотного сложения брусков. Курится вследствие табак чи специальные устройства.
Кто такой употребляет: Те же, кто утилизирует марихуану — подростки, учащиеся, эпизодично сильнее совершеннолетние покупатели, расположенные ко «релаксу» да изменению восприятия.
Трава
Яко это: Высушенные листья а также цветы растения каннабис. Употребляется путём курения, реже — в еде. Вызывает успокоение, изменённое восприятие равно эйфорию.
Кто употребляет: Очень широкий эклиптика — через подростков до взрослых. В некоторых краях легализована, яко действует на цветовосприятие её яко «безопасной», особенно язык молодёжи.
Estella Carvalho says:
Кокаин
Яко этто: Сильнодействующий стимулятор основной нервическою системы. Исполнять роль собою белый цинаш, почаще всего вдыхается через нос. Я мухой вызывает привыкание.
Кто такой применяет: Обычно — молодые люди 20–40 полет, в течение этом числе изо безбедных миров союзы, часто — для «вечеринок», подъема энергии, уверенности а также работоспособности.
Мефедрон
Яко это: Химический наркотик, дериват амфетамина. Обладает инициирующим равным образом психодислептическим эффектом. Распространён на пейзаже порошка или таблеток.
Кто употребляет: Подростки и молодёжь, чаще сверху пирушках, рейвах и еще на клубах. Особенно востребован на сфере тех, кто отыскивает «новоиспеченные чувства» чи юркий кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения каннабис (марихуаны), держащих высокую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — подростки также молодые штаты, как шест, в компании. Разблаговещены за относительной доступности и мифа что касается «невредности».
Ямба
Что этто: Наркотик, штампуемый из надоедалы растения каннабис. Обладает форму тёмных, коренастых брусков. Курится после табак или специализированные устройства.
Кто употребляет: Те ну, кто такой использует марихуану — подростки, учащиеся вузов, эпизодично более взрослые покупатели, склонные к «релаксу» и еще изменению восприятия.
Марихуана
Что это: Подсушенные хряпа и еще цветочки растения каннабис. Употребляется путем курения, реже — в еде. Инициирует успокоение, изменённое цветовосприятие равно эйфорию.
Кто употребляет: Очень широкий эклиптика — через школьников до взрослых. В ТЕЧЕНИЕ отдельных краях легализована, что действует на восприятие ее как «загоришься», экстренно у молодёжи.
http://marifra13.myjino.ru/2025/07/08/oficialnyj-azino-777-pogruzhenie-v-mir-azartnyh/ says:
зайдите на портал, войдите в личный профиль, выберите любимый игровой автомат, и начните играть.
Stop by my blog … http://marifra13.myjino.ru/2025/07/08/oficialnyj-azino-777-pogruzhenie-v-mir-azartnyh/
азино 777 зеркало says:
Азино 777 известно своими интересными промоакциями, включая бездепозитный бонус в виде 777 рублей для новых игроков, https://azinoru-ru.com/.
Sheryl Chamberlain says:
Снежок
Что этто: Сильнодействующий электростимулятор стержневой нервическою системы. Исполнять роль собой ярый порошок, чаще честь имею кланяться вдыхается после нос. Я мухой побуждает привыкание.
Кто такой употребляет: Обычно — юные штаты 20–40 лет, на том количестве с снабженных миров слоя, часто — для «тусовок», увеличения энергии, уверенности и еще работоспособности.
Мефедрон
Что это: Химический наркотик, производное амфетамина. Владеет стимулирующим равным образом галлюциногенным эффектом. Распространён в течение наружности порошка чи таблеток.
Кто такой применяет: Молодые люди а также молодёжь, почаще на пирушках, рейвах и на клубах. Особенно востребован в сфере этих, кто отыскивает «новоиспеченные чувства» или быстрый кайф.
Бошки
Что этто: Разговорное название элит соцветий растения наркотик (марихуаны), сохраняющих рослую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — молодые люди также юные штаты, яко правило, на компании. Распространены за относительной доступности равно мифа о «безопасности».
Ямба
Яко это: Наркотик, штампуемый из смолы растения каннабис. Обладает фигуру тёмных, густых брусков. Курится через сигареты или спец. устройства.
Кто такой применяет: Те ну, кто такой утилизирует марихуану — школьники, учащиеся вузов, эпизодично сильнее совершеннолетные покупатели, расположенные буква «релаксу» да изменению восприятия.
Марихуана
Яко это: Подсушенные листья равным образом цветочки растения каннабис. Употребляется путем курения, реже — на еде. Вызывает успокоение, изменённое восприятие равно эйфорию.
Кто употребляет: Шибко широченный эклиптика — через подростков до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, яко действует на цветовосприятие её яко «безобидной», особенно у молодёжи.
Ramona Chiu says:
Снежок
Что это: Забористый электростимулятор стержневой нервической системы. Доставляет собою ярый цинаш, чаще честь имею кланяться вдыхается посредством нос. Я мухой возбуждает привыкание.
Кто употребляет: Обычно — молодые люди 20–40 полет, в течение этом числе из безбедных миров окружения, часто — для «тусовок», подъема энергии, уверенности и еще работоспособности.
Мефедрон
Что этто: Синтетический наркотик, производное амфетамина. Имеет ускоряющим и психодислептическим эффектом. Распространён на пейзаже порошка чи таблеток.
Кто такой употребляет: Молодые люди и молодёжь, почаще на тусовках, рейвах и еще на клубах. Особенно популярен на сфере тех, кто отыскивает «новые чувства» чи быстрый кайф.
Бошки
Яко этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), сохраняющих рослую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — молодые также юные штаты, как шест, в компании. Излиты за относительной доступности и мифа что касается «невредности».
Ямба
Яко этто: Эфир, производимый из смолы растения каннабис. Обладает форму тёмных, плотного сложения брусков. Курится после табак чи особенные устройства.
Кто применяет: Эти ну, кто такой утилизирует марихуану — школьники, учащиеся вузов, эпизодично сильнее старшие покупатели, расположенные буква «релаксу» и еще изменению восприятия.
Марихуана
Яко этто: Подсушенные листья и цветы растения каннабис. Применяется путем курения, пореже — в течение еде. Инициирует расслабление, изменённое цветовосприятие и эйфорию.
Кто такой применяет: Шибко широкий круг — от подростков до взрослых. В некоторых сторонах легализована, яко влияет сверху восприятие ее яко «безобидной», особенно у молодёжи.
Alena Calkins says:
Кокаин
Яко этто: Сильный электростимулятор стержневой нервной системы. Представляет собой белый порошок, чаще всего вдыхается чрез нос. Быстро вызывает привыкание.
Кто употребляет: Обычно — молодые штаты 20–40 полет, на этом количестве изо гарантированных пластов слоя, часто — для «тусовок», увеличения энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Химический эфир, производное амфетамина. Обладает стимулирующим и психодислептическим эффектом. Распространён в течение наружности порошка чи таблеток.
Кто употребляет: Дети равным образом молодежь, чаще на гулянках, рейвах и еще в течение клубах. Экстренно популярен в течение мире этих, кто такой ищет «новые ощущения» или юркий кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения каннабис (марихуаны), содержащих высокую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — дети также молодые люди, как правило, в течение компании. Распространены в связи сравнительной доступности (а) также мифа что касается «безопасности».
Ямба
Что это: Эфир, производимый изо смолы растения каннабис. Быть владельцем форму тёмных, плотного сложения брусков. Попыхивается через сигареты чи спец. устройства.
Кто употребляет: Те же, кто использует марихуану — школьники, студенты, иногда более совершеннолетние потребители, расположенные ко «релаксу» и изменению восприятия.
Трава
Яко это: Подсушенные листья равным образом цветы растения каннабис. Применяется путем курения, пореже — на еде. Вызывает успокоение, изменённое восприятие и еще эйфорию.
Кто такой употребляет: Шибко широченный эклиптика — от подростков до взрослых. В ТЕЧЕНИЕ отдельных краях легализована, яко влияет на цветовосприятие ее как «неопасной», особенно язык молодёжи.
Ila Stahlman says:
Кокаин
Яко этто: Сильнодействующий стимулятор стержневой нервной системы. Доставляет собою ярый порошок, чаще честь имею кланяться вдыхается чрез нос. Быстро возбуждает привыкание.
Кто употребляет: Обычно — юные люди 20–40 полет, в этом количестве из безбедных миров окружения, через слово — для «вечеринок», подъема энергии, уверенности и работоспособности.
Мефедрон
Что это: Синтетический эфир, происхождение амфетамина. Имеет стимулирующим и галлюциногенным эффектом. Распространён в течение варианте порошка чи таблеток.
Кто применяет: Дети равным образом молодежь, чаще сверху вечеринках, рейвах и на клубах. Экстренно известен в течение среде тех, кто такой отыскивает «новоиспеченные ощущения» чи юркий кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), содержащих высокую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — молодые люди и юные люди, яко шест, в компании. Излиты за относительной доступности (а) также домысла о «безвредности».
Гашиш
Что это: Наркотик, штампуемый из надоедалы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Попыхивается вследствие сигареты или спец. устройства.
Кто употребляет: Эти ну, кто использует марихуану — подростки, учащиеся, эпизодично более взрослые потребители, склонные ко «релаксу» и изменению восприятия.
Трава
Что этто: Высушенные листья а также цветочки растения каннабис. Применяется путём курения, реже — в течение еде. Побуждает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто применяет: Шибко широкий эклиптика — от подростков до взрослых. В ТЕЧЕНИЕ некоторых странах легализована, что воздействует на цветовосприятие её как «неопасной», экстренно у молодёжи.
Brigette Gaffney says:
Кокаин
Яко это: Сильный электростимулятор основной нервной системы. Исполнять роль собою ярый порошок, чаще всего вдыхается чрез нос. Я мухой побуждает привыкание.
Кто такой употребляет: Элементарно — юные люди 20–40 лет, в течение том количестве с обеспеченных пластов слоя, через слово — для «тусовок», повышения энергии, убежденности и работоспособности.
Мефедрон
Что этто: Химический эфир, происхождение амфетамина. Обладает ускоряющим равно психодислептическим эффектом. Распространён на варианте порошка чи таблеток.
Кто применяет: Подростки а также молодёжь, чаще сверху пирушках, рейвах и еще на клубах. Особенно известен в течение среде тех, кто ищет «новые ощущения» или юркий кайф.
Бошки
Что этто: Разговорное название макушек соцветий растения каннабис (марихуаны), охватывающих высокую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — молодые люди и еще юные люди, яко правило, на компании. Излиты ради условной доступности да домысла о «безвредности».
Гашиш
Что это: Наркотик, производимый с надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, плотных брусков. Попыхивается сквозь сигареты чи специализированные устройства.
Кто такой употребляет: Эти ну, кто использует марихуану — подростки, учащиеся, эпизодично сильнее совершеннолетние потребители, склонные ко «релаксу» и еще изменению восприятия.
Трава
Яко этто: Высушенные листья и еще цветочки растения каннабис. Употребляется путём курения, реже — в течение еде. Побуждает успокоение, изменённое восприятие и еще эйфорию.
Кто такой применяет: Очень широченный круг — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных странах легализована, яко действует на восприятие ее как «безопасной», экстренно язык молодёжи.
Kia Lipsey says:
Снежок
Яко этто: Сильнодействующий электростимулятор центральной нервической системы. Исполнять роль собой белый цинаш, почаще честь имею кланяться вдыхается после нос. Я мухой возбуждает привыкание.
Кто такой применяет: Элементарно — молодые штаты 20–40 полет, в течение том количестве с снабженных пластов общества, часто — чтобы «тусовок», подъема энергии, уверенности да работоспособности.
Мефедрон
Яко этто: Химический эфир, выводное амфетамина. Обладает инициирующим равно психодислептическим эффектом. Распространён в виде порошка чи таблеток.
Кто употребляет: Дети равным образом молодёжь, чаще на тусовках, рейвах также в клубах. Особенно востребован в течение мире этих, кто такой ищет «новые ощущения» или юркий кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), держащих рослую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — подростки также юные штаты, яко шест, в течение компании. Испущены за относительной доступности (а) также домысла о «безвредности».
Гашиш
Яко этто: Эфир, производимый с надоедалы растения каннабис. Имеет фигуру тёмных, плотного сложения брусков. Курится после сигареты или специальные устройства.
Кто такой применяет: Эти же, кто такой использует марихуану — подростки, студенты, иногда сильнее взрослые покупатели, склонные ко «релаксу» да изменению восприятия.
Трава
Яко это: Подсушенные хряпа а также цветочки растения каннабис. Применяется путём курения, пореже — в течение еде. Поднимает расслабление, изменённое восприятие и еще эйфорию.
Кто такой применяет: Очень широкий эклиптика — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых странах легализована, что влияет сверху восприятие ее яко «загоришься», экстренно у молодёжи.
Riley Sorenson says:
Снежок
Что это: Забористый электростимулятор стержневой сердитой системы. Доставляет собою ярый порошок, чаще всего вдыхается посредством нос. Быстро провоцирует привыкание.
Кто употребляет: Элементарно — юные люди 20–40 лет, на том количестве из безбедных миров слоя, через слово — для «тусовок», увеличения энергии, убежденности да работоспособности.
Мефедрон
Яко этто: Химический наркотик, дериват амфетамина. Имеет возбуждающим да галлюциногенным эффектом. Распространён на виде порошка или таблеток.
Кто такой употребляет: Дети (а) также молодежь, чаще сверху гулянках, рейвах и в клубах. Экстренно известен в течение мире этих, кто отыскивает «новые ощущения» или быстрый кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения наркотик (марихуаны), содержащих высокую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — молодые и молодые штаты, яко правило, на компании. Испущены из-за относительной доступности и мифа о «невредности».
Ямба
Яко это: Наркотик, производимый из надоедалы растения каннабис. Обладает фигуру тёмных, плотных брусков. Курится вследствие сигареты чи специальные устройства.
Кто такой употребляет: Те ну, кто такой использует марихуану — подростки, студенты, эпизодично более совершеннолетные потребители, склонные ко «релаксу» и изменению восприятия.
Трава
Что этто: Высушенные листья и цветы растения каннабис. Употребляется путем курения, пореже — в течение еде. Вызывает расслабление, изменённое восприятие а также эйфорию.
Кто такой употребляет: Очень широченный эклиптика — от школьников ут взрослых. В некоторых государствах легализована, яко оказывает большое влияние на цветовосприятие её яко «безобидной», экстренно у молодёжи.
Bettie Douglas says:
Снежок
Что это: Забористый электростимулятор стержневой сердитой системы. Представляет собою ярый порошок, чаще всего вдыхается чрез нос. Быстро побуждает привыкание.
Кто такой применяет: Элементарно — молодые люди 20–40 полет, в течение том количестве изо гарантированных пластов слоя, через слово — для «тусовок», повышения энергии, убежденности и работоспособности.
Мефедрон
Что этто: Химический эфир, происхождение амфетамина. Обладает стимулирующим равным образом психодислептическим эффектом. Распространён в течение варианте порошка или таблеток.
Кто такой употребляет: Школьники а также молодёжь, почаще на тусовках, рейвах и еще в клубах. Особенно известен в течение сфере тех, кто отыскивает «новые чувства» чи юркий кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), охватывающих высокую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — молодые люди и еще юные люди, как шест, в течение компании. Излиты в связи сравнительной доступности и мифа о «невредности».
Гашиш
Что этто: Эфир, производимый из смолы растения каннабис. Обладает форму тёмных, плотных брусков. Курится вследствие сигареты или спец. устройства.
Кто употребляет: Эти ну, кто использует марихуану — подростки, учащиеся, иногда сильнее взрослые покупатели, склонные для «релаксу» и изменению восприятия.
Марихуана
Яко это: Подсушенные хряпа равным образом цветочки растения каннабис. Употребляется путем курения, реже — в течение еде. Побуждает успокоение, изменённое цветовосприятие и эйфорию.
Кто такой применяет: Очень широченный эклиптика — от подростков ут взрослых. В некоторых краях легализована, яко действует на цветовосприятие её яко «безобидной», экстренно язык молодёжи.
купить бошки says:
Кокаин
Что это: Сильнодействующий стимулятор центральной нервическою системы.
Представляет собою ярый
цинаш, чаще честь имею кланяться вдыхается через нос.
Я мухой возбуждает привыкание.
Кто такой применяет: Элементарно — молодые штаты 20–40 лет, на
этом части с гарантированных пластов общества, часто — для «тусовок», увеличения энергии, уверенности а также работоспособности.
Мефедрон
Яко это: Синтетический наркотик, производное амфетамина.
Имеет возбуждающим равно галлюциногенным эффектом.
Распространён в течение пейзаже порошка чи таблеток.
Кто такой применяет: Дети а также молодёжь, чаще сверху пирушках, рейвах да на клубах.
Экстренно моден в слою этих, кто
такой отыскивает «новые чувства» чи
быстрый кайф.
Бошки
Что это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны),
охватывающих высокую концентрацию психоактивного материала — ТГК
(тетрагидроканнабинол).
Кто употребляет: Почаще всего — подростки и молодые штаты, как
шест, на компании. Распространены ради относительной доступности и мифа о «безопасности».
Ямба
Что это: Эфир, штампуемый из
надоедалы растения каннабис.
Быть владельцем фигуру тёмных,
плотных брусков. Попыхивается после
табак или особенные устройства.
Кто такой употребляет: Те ну, кто использует марихуану —
подростки, учащиеся вузов, иногда более совершеннолетние потребители, склонные ко
«релаксу» и изменению восприятия.
Трава
Яко это: Подсушенные хряпа и цветы растения каннабис.
Применяется путем курения, пореже
— в течение еде. Поднимает успокоение, изменённое цветовосприятие и эйфорию.
Кто употребляет: Шибко широченный круг — от подростков до
взрослых. В ТЕЧЕНИЕ некоторых
государствах легализована,
что действует сверху восприятие её яко «загоришься», особенно язык молодёжи.
Steve Grainger says:
Кокаин
Яко это: Сильный стимулятор основной сердитой системы. Представляет собой ярый порошок, почаще всего вдыхается чрез нос. Я мухой возбуждает привыкание.
Кто такой употребляет: Обычно — юные штаты 20–40 полет, на этом количестве из безбедных пластов союзы, через слово — для «вечеринок», повышения энергии, уверенности да работоспособности.
Мефедрон
Что этто: Синтетический наркотик, дериват амфетамина. Иметь в своем распоряжении инициирующим равно галлюциногенным эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой применяет: Школьники (а) также молодёжь, почаще сверху вечеринках, рейвах да на клубах. Особенно востребован в течение среде этих, кто отыскивает «последние ощущения» или быстрый кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), охватывающих высокую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — дети и юные люди, как правило, на компании. Излиты ради относительной доступности равно мифа что касается «безвредности».
Ямба
Яко это: Наркотик, штампуемый изо надоедалы растения каннабис. Имеет фигуру тёмных, густых брусков. Курится сквозь сигареты чи особенные устройства.
Кто такой применяет: Те же, кто утилизирует марихуану — подростки, студенты, иногда сильнее совершеннолетные потребители, склонные к «релаксу» а также изменению восприятия.
Марихуана
Что этто: Высушенные хряпа а также цветочки растения каннабис. Применяется путем курения, пореже — в течение еде. Инициирует расслабление, изменённое цветовосприятие и эйфорию.
Кто такой применяет: Шибко широкий круг — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных краях легализована, яко влияет сверху цветовосприятие её яко «безобидной», экстренно у молодёжи.
http://playgensports.com/azino-777-mir-azartnyh-razvlechenij/ says:
Да, мы в точности соблюдаем принципы ответственной игры, защищаем персональные сведения народа, и требуем проведение верификации,.
Here is my blog – http://playgensports.com/azino-777-mir-azartnyh-razvlechenij/
https://kingoalmilling.com/vse-chto-vam-nuzhno-znat-ob-azino777-oficialnyj/ says:
Испытайте удачу в лучших геймах, и попробуйте сорвать https://kingoalmilling.com/vse-chto-vam-nuzhno-znat-ob-azino777-oficialnyj/ мега-джекпот!
азино 777 вход says:
Если выбрана другая валюта, https://azinocasino-ru.com/ проводится автоматическая конвертация переводимых сумм.
https://altynayturekhanqyzy.kz/azino777-oficialnyj-sajt-obzor-i-preimushhestva/ says:
Зарегистрируйтесь на веб-ресурсах онлайн игорном доме и примите вступление в дело захватывающих Получайте бонусы и станьте настоящим.
my site :: https://altynayturekhanqyzy.kz/azino777-oficialnyj-sajt-obzor-i-preimushhestva/
p5724 says:
Ставка «змея» доступна не http://repetitor.ekafe.ru/viewtopic.php?f=7&t=4802&p=5724#http://repetitor.ekafe.ru/viewtopic.php?f=7&t=4802&p=5724 во всех казино.
azino777 зеркало says:
как принять участие в состязаниях. 7 для своих https://datastack.ltd/ клиентов.
Jacquelyn Everingham says:
Hi all, here every person is sharing these kinds of knowledge, so it’s fastidious to read this webpage, and I used to visit this website daily.
https://irnpost.com/maximizing-the-benefits-of-voip-services/ says:
My blog post https://irnpost.com/maximizing-the-benefits-of-voip-services/
https://bewitcheryblog.co.uk/is-30-minutes-of-cardio-enough-to-lose-weight-facts-myths-real-results says:
2. Create a news post, experts for shaping the page of a news post. 1. go to website with events, where it will work to add a publication with https://bewitcheryblog.co.uk/is-30-minutes-of-cardio-enough-to-lose-weight-facts-myths-real-results.
Johnie Paquette says:
Hurrah! At last I got a webpage from where I be capable of actually obtain valuable facts regarding my study and knowledge.
бийские новости бийск says:
здесь вы найдете особенно важные и ответственные происшествия, новости города, последние https://biwork.ru/ бизнеса, но и события в.
http://androidmobiles.com/uncategorized/azino-777-zerkalo-dostup-k-azartnym-razvlechenijam says:
Первое, что привлекло пользователей, http://androidmobiles.com/uncategorized/azino-777-zerkalo-dostup-k-azartnym-razvlechenijam – это лицензия на проведение интернет казино.
https://jaybabani.com/material-wp-admin/?p=36794 says:
here available free bets for new users, express bonuses, betting insurance, winlion https://jaybabani.com/material-wp-admin/?p=36794 and cashback but loss.
https://rayzentreprise.com/descubra-a-revolucao-das-apostas-online-com-7kbet/ says:
Escolher as melhores casas de apostas brasileiras não é fácil, porque tal análise depende do perfil de Qualquer Cliente, no entanto Brasil, betmgm, https://rayzentreprise.com/descubra-a-revolucao-das-apostas-online-com-7kbet/ e o Sr.
https://cabxana.com/2025/07/10/kazino-sloty-igrovye-avtomaty-otkrojte-mir/ says:
5. в игровые автоматы с джекпотом необходимо играть по наиболее https://cabxana.com/2025/07/10/kazino-sloty-igrovye-avtomaty-otkrojte-mir/ серьезным ставкам.
http://highlandsgardenslodge.co.uk/fedezd-fel-az-av-bonus-izgalmait says:
լավ սպասարկում հաճախորդների համար-նշանակալի բաղադրիչ վիրտուալ ԲԿ: արագ, պատասխանատու և օգտակար Հաճախորդների սպասարկում հաճախորդներ.
Review my web-site; http://highlandsgardenslodge.co.uk/fedezd-fel-az-av-bonus-izgalmait
Elsie Yancey says:
Greate post. Keep writing such kind of information on your site. Im really impressed by your site.
Hello there, You’ve done an incredible job. I’ll definitely digg it and in my opinion suggest to my friends. I’m confident they’ll be benefited from this site. dark markets 2025 https://mydarknetmarketsonline.com
https://thisplacematters.ca/?p=29375 says:
только в ряде МФО можно оставить заявки по интернету для получения денег взаймы https://thisplacematters.ca/?p=29375 на длительный период.
Bigger Bass Bonanza says:
ayrıca/ayrıca/diğer şeylerin yanı sıra/ve başka, yapabilirsin/seçeneğiniz var vahşi sembollerin kilidini aç https://ebcoglobal.com/ sadece/sadece/sadece/sadece sırasında/döneminde ücretsiz/bonus dönüşler/denemeler.
https://muje.org/2025/07/11/nowe-kasyna-z-bonusem-bez-depozytu-eksploruj/ says:
I to jedna z najbardziej często spotykane błędy w casino. Odpowiedzialna gra, która pomaga zniwelować takie ryzyko, https://muje.org/2025/07/11/nowe-kasyna-z-bonusem-bez-depozytu-eksploruj/ to jest pierwszy zastosowanie dwóch zasad.
best place to buy gold says:
Thanks for all your efforts that you have put in this. Very interesting info.
https://praz.vn/wazamba-pl-odkryj-najlepsze-kasyno-online/ says:
Renomowane wirtualne kasyna używają/ stosują szereg narzędzi, które deklarują, że zakłady będą odpowiedzialne, https://praz.vn/wazamba-pl-odkryj-najlepsze-kasyno-online/ za oznacza, i bezpieczny sposób.
http://logo-def.ru/userinfo.php?uid=33921 says:
в реальном игорном доме есть пять игровых автоматов (игроку разрешается только четыре – http://logo-def.ru/userinfo.php?uid=33921 последний уже занят).
just kraken официальный сайт says:
мы сделаем все необходимые санкции для обеспечения безопасности и анонимности информации своих заказчиков, https://t.me/kr33at.
the best replica watches in the world says:
if available of the information, go to be paid (see methods of payment in categories 4) and specify your name and delivery address.https://www.replicawatches.ink/
parabet says:
eğer /eğer ailenizde ortaya çıkacak sorular veya zorluklar , her zaman hukukçulara teknik destek başvurabilirsiniz. işte bu/verilen deneyim parabet çevrimiçi/internet/sanal kuruluş https://pembetasarim.com/!
https://rollettu.com/bonus says:
Given the operator’s legacy, therefore the https://b2web.waisdigital.com/2025/06/29/have-fun-with-the-better-casino-games/ has one of the best applications for gambling houses on the market.
кракен ссылка зеркало kraken one com says:
после этого еще раз нажмите sign in.
my web blog :: https://krak33.com/
Diane Arek says:
What’s up Dear, are you genuinely visiting this website on a regular basis, if so then you will without doubt get pleasant knowledge. darknet markets 2025 https://darknetmarketslist.com
recommended ira for gold investments says:
Aw, this was a really good post. Taking the time and actual effort to make a superb article? but what can I say? I put things off a whole lot and never seem to get anything done.
GOOGLE DELETE PHISING says:
Hi friends, pleasant piece of writing and fastidious urging commented at this place, I am genuinely enjoying by these.
rolex super clone watches says:
The Pentagon chose the https://www.swissetareplica.com/ movement for each military personnel when USA
Shona Taggart says:
9 Lessons Your Parents Teach You About Coffee Machine Bosch Tassimo coffee machine bosch tassimo – Caitlin,
Group private Jets charter says:
Hmm is anyone else encountering problems with the pictures on this blog loading? I’m trying to figure out if its a problem on my end or if it’s the blog. Any feed-back would be greatly appreciated.
https://bwines.es/bwin-app/ says:
Sí, para para jugar en Bwin App. usted va físicamente permanecer en España siguiendo las leyes nacionales en líneajuego juegos.
my web blog :: https://bwines.es/bwin-app/
sbobet login says:
Hello, i feel that i noticed you visited my weblog so i came to go back the
want?.I’m attempting to in finding issues to improve my web site!I guess its ok to make use of some
of your ideas!!
https://krasnodar.helpmens.ru says:
имеется несколько обстоятельств, в которых пригождается услуга МУЖ на час или домашний мастер в Могилеве: ремонт, приобретение мебели,.
my webpage … https://krasnodar.helpmens.ru/
Bart Partlow says:
Кокаин
Что это: Сильный электростимулятор основной нервической системы. Исполнять роль собою ярый цинаш, чаще честь имею кланяться вдыхается чрез нос. Я мухой вызывает привыкание.
Кто применяет: Обычно — молодые люди 20–40 лет, в том числе с безбедных пластов общества, через слово — для «тусовок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Что это: Синтетический наркотик, выводное амфетамина. Владеет ускоряющим равно психодислептическим эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой употребляет: Дети (а) также молодёжь, чаще на гулянках, рейвах да в течение клубах. Экстренно востребован в течение сфере этих, кто такой ищет «новоиспеченные ощущения» чи быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), содержащих высокую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — молодые люди и молодые штаты, как шест, в компании. Испущены из-за сравнительной доступности и мифа о «безвредности».
Гашиш
Что это: Наркотик, производимый из смолы растения каннабис. Иметь в распоряжении форму тёмных, коренастых брусков. Попыхивается после сигареты или особенные устройства.
Кто такой применяет: Эти ну, кто утилизирует марихуану — подростки, студенты, иногда более совершеннолетные потребители, склонные буква «релаксу» а также изменению восприятия.
Марихуана
Что этто: Высушенные листья и еще цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Побуждает расслабление, изменённое восприятие а также эйфорию.
Кто такой применяет: Шибко широкий круг — через школьников ут взрослых. В отдельных государствах легализована, что влияет сверху цветовосприятие ее яко «безобидной», экстренно язык молодёжи.
Genia Roger says:
Кокаин
Что этто: Сильный стимулятор основной нервической системы. Представляет собою белый цинаш, чаще честь имею кланяться вдыхается через нос. Быстро побуждает привыкание.
Кто употребляет: Элементарно — молодые штаты 20–40 полет, в течение этом числе изо снабженных миров общества, через слово — для «тусовок», повышения энергии, убежденности да работоспособности.
Мефедрон
Что это: Химический наркотик, дериват амфетамина. Владеет ускоряющим да психодислептическим эффектом. Распространён на варианте порошка или таблеток.
Кто такой употребляет: Дети и молодежь, почаще сверху вечеринках, рейвах и еще в течение клубах. Экстренно популярен в течение мире этих, кто такой ищет «новоиспеченные чувства» или юркий кайф.
Бошки
Яко это: Разговорное этноним элит соцветий растения наркотик (марихуаны), охватывающих рослую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — молодые и молодые люди, яко шест, в течение компании. Распространены ради условной доступности да мифа о «невредности».
Гашиш
Яко этто: Эфир, штампуемый из надоедалы растения каннабис. Имеет фигуру тёмных, плотных брусков. Курится после сигареты или специальные устройства.
Кто такой употребляет: Те ну, кто утилизирует марихуану — школьники, студенты, иногда сильнее взрослые покупатели, склонные буква «релаксу» и еще изменению восприятия.
Трава
Что это: Высушенные листья а также цветочки растения каннабис. Употребляется путем курения, пореже — на еде. Поднимает успокоение, изменённое восприятие и еще эйфорию.
Кто употребляет: Очень широченный круг — от школьников до взрослых. В некоторых государствах легализована, яко воздействует на цветовосприятие ее яко «загоришься», экстренно у молодёжи.
Yong Holton says:
Снежок
Яко это: Сильный стимулятор основной нервической системы. Доставляет собой белый порошок, почаще всего вдыхается после нос. Я мухой провоцирует привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 лет, на том части с гарантированных миров окружения, часто — для «тусовок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Яко этто: Химический эфир, производное амфетамина. Владеет инициирующим и психодислептическим эффектом. Распространён в варианте порошка чи таблеток.
Кто применяет: Дети а также молодежь, почаще на гулянках, рейвах да на клубах. Особенно известен в течение сфере этих, кто такой ищет «новоиспеченные чувства» или быстрый кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), охватывающих рослую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — молодые люди да молодые люди, как правило, в компании. Излиты ради относительной доступности и домысла о «безвредности».
Гашиш
Яко этто: Наркотик, производимый с смолы растения каннабис. Быть владельцем фигуру тёмных, плотных брусков. Попыхивается после табак чи специальные устройства.
Кто употребляет: Эти ну, кто использует марихуану — подростки, студенты, иногда более взрослые потребители, склонные к «релаксу» и изменению восприятия.
Марихуана
Что это: Подсушенные листья и цветочки растения каннабис. Применяется путём курения, пореже — на еде. Поднимает расслабление, изменённое цветовосприятие а также эйфорию.
Кто применяет: Очень широченный эклиптика — от школьников до взрослых. В некоторых сторонах легализована, яко действует на цветовосприятие ее яко «безопасной», особенно у молодёжи.
Roosevelt Moody says:
Кокаин
Что этто: Сильный стимулятор стержневой нервной системы. Доставляет собой белый порошок, чаще всего вдыхается посредством нос. Быстро возбуждает привыкание.
Кто такой применяет: Обычно — молодые штаты 20–40 лет, в том части с снабженных слоёв слоя, часто — чтобы «вечеринок», повышения энергии, убежденности и работоспособности.
Мефедрон
Что этто: Синтетический наркотик, производное амфетамина. Имеет стимулирующим равно галлюциногенным эффектом. Распространён в варианте порошка или таблеток.
Кто такой применяет: Подростки равным образом молодёжь, почаще сверху гулянках, рейвах да в клубах. Особенно моден в сфере тех, кто ищет «новые чувства» или юркий кайф.
Бошки
Яко это: Разговорное название элит соцветий растения каннабис (марихуаны), держащих высокую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — дети да молодые люди, яко шест, на компании. Излиты из-за сравнительной доступности равно мифа что касается «безопасности».
Ямба
Что этто: Наркотик, производимый изо смолы растения каннабис. Имеет фигуру тёмных, коренастых брусков. Попыхивается сквозь сигареты или особенные устройства.
Кто такой применяет: Те ну, кто такой использует марихуану — школьники, студенты, эпизодично более старшие покупатели, расположенные к «релаксу» и еще изменению восприятия.
Марихуана
Яко это: Подсушенные листья равным образом цветочки растения каннабис. Применяется путём курения, пореже — в течение еде. Поднимает успокоение, изменённое восприятие и еще эйфорию.
Кто такой применяет: Очень широченный круг — от школьников ут взрослых. В ТЕЧЕНИЕ некоторых краях легализована, что оказывает большое влияние на цветовосприятие ее яко «загоришься», экстренно у молодёжи.
Chara Edelson says:
Кокаин
Что этто: Сильный электростимулятор основной сердитой системы. Представляет собою белый цинаш, почаще всего вдыхается посредством нос. Я мухой побуждает привыкание.
Кто употребляет: Обычно — молодые люди 20–40 полет, в течение том числе из гарантированных миров слоя, через слово — для «тусовок», подъема энергии, убежденности и еще работоспособности.
Мефедрон
Яко это: Синтетический эфир, производное амфетамина. Имеет возбуждающим равным образом психодислептическим эффектом. Распространён на пейзаже порошка чи таблеток.
Кто такой применяет: Дети и молодёжь, почаще на гулянках, рейвах и еще в клубах. Экстренно востребован на слою тех, кто такой ищет «новые чувства» чи быстрый кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), охватывающих высокую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — молодые и юные штаты, как правило, в течение компании. Разблаговещены из-за сравнительной доступности (а) также домысла о «невредности».
Ямба
Яко этто: Эфир, производимый изо смолы растения каннабис. Быть владельцем фигуру тёмных, плотных брусков. Курится сквозь табак или особенные устройства.
Кто такой употребляет: Те же, кто использует марихуану — школьники, учащиеся, иногда более взрослые потребители, склонные ко «релаксу» и еще изменению восприятия.
Марихуана
Яко этто: Подсушенные листья и цветочки растения каннабис. Употребляется путем курения, реже — на еде. Вызывает успокоение, изменённое цветовосприятие и еще эйфорию.
Кто такой употребляет: Шибко широкий круг — от подростков до взрослых. НА отдельных краях легализована, что воздействует на цветовосприятие её яко «неопасной», особенно у молодёжи.
Issac Watt says:
Снежок
Что этто: Сильнодействующий стимулятор основной нервической системы. Представляет собой белый цинаш, почаще всего вдыхается после нос. Быстро вызывает привыкание.
Кто такой применяет: Элементарно — молодые штаты 20–40 лет, в том количестве из гарантированных пластов общества, часто — чтобы «вечеринок», подъема энергии, убежденности да работоспособности.
Мефедрон
Яко это: Синтетический наркотик, дериват амфетамина. Обладает инициирующим и психодислептическим эффектом. Распространён в виде порошка или таблеток.
Кто такой употребляет: Школьники равным образом молодёжь, чаще на пирушках, рейвах также на клубах. Особенно моден в течение слою тех, кто ищет «новые чувства» или юркий кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), держащих высокую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — молодые да юные штаты, как шест, в течение компании. Разблаговещены в связи сравнительной доступности да мифа что касается «невредности».
Ямба
Что это: Эфир, штампуемый с смолы растения каннабис. Обладает форму тёмных, густых брусков. Курится вследствие сигареты чи специализированные устройства.
Кто такой применяет: Те же, кто такой утилизирует марихуану — подростки, учащиеся вузов, эпизодично более старшие потребители, склонные ко «релаксу» и изменению восприятия.
Трава
Яко это: Высушенные листья и еще цветочки растения каннабис. Применяется путем курения, пореже — в течение еде. Побуждает расслабление, изменённое восприятие равно эйфорию.
Кто употребляет: Шибко широченный эклиптика — через подростков ут взрослых. В отдельных государствах легализована, что оказывает большое влияние на цветовосприятие ее яко «безобидной», особенно язык молодёжи.
Marylin Bidwell says:
Кокаин
Яко это: Забористый стимулятор центральной нервическою системы. Доставляет собой ярый порошок, почаще всего вдыхается чрез нос. Я мухой вызывает привыкание.
Кто употребляет: Обычно — молодые люди 20–40 полет, в течение том числе с обеспеченных пластов слоя, через слово — для «тусовок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Яко этто: Химический наркотик, выводное амфетамина. Иметь в своем распоряжении инициирующим равным образом психодислептическим эффектом. Распространён в течение виде порошка чи таблеток.
Кто применяет: Школьники (а) также молодежь, почаще сверху пирушках, рейвах также в течение клубах. Экстренно популярен на слою тех, кто ищет «новые чувства» чи юркий кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), охватывающих рослую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — подростки и еще молодые штаты, как шест, на компании. Распространены из-за сравнительной доступности (а) также мифа о «безвредности».
Ямба
Яко этто: Наркотик, производимый из смолы растения каннабис. Иметь в распоряжении форму тёмных, коренастых брусков. Курится вследствие табак или специальные устройства.
Кто употребляет: Эти же, кто такой утилизирует марихуану — школьники, учащиеся, эпизодично более взрослые покупатели, расположенные для «релаксу» да изменению восприятия.
Трава
Яко это: Подсушенные листья и еще цветочки растения каннабис. Применяется путем курения, пореже — на еде. Инициирует расслабление, изменённое цветовосприятие и эйфорию.
Кто употребляет: Очень широченный круг — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, что влияет на цветовосприятие её яко «неопасной», особенно у молодёжи.
Cory Mullens says:
Снежок
Что это: Сильный электростимулятор стержневой нервическою системы. Рисует собою белый порошок, чаще честь имею кланяться вдыхается через нос. Быстро возбуждает привыкание.
Кто применяет: Обычно — молодые люди 20–40 полет, в течение том количестве с обеспеченных пластов общества, через слово — чтобы «тусовок», повышения энергии, убежденности и работоспособности.
Мефедрон
Яко это: Химический наркотик, производное амфетамина. Владеет возбуждающим равно галлюциногенным эффектом. Распространён на виде порошка чи таблеток.
Кто применяет: Дети а также молодёжь, почаще на вечеринках, рейвах и в течение клубах. Экстренно востребован в течение сфере этих, кто такой ищет «новые чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное название макушек соцветий растения наркотик (марихуаны), содержащих высокую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — молодые также юные люди, яко правило, в течение компании. Разблаговещены из-за сравнительной доступности да мифа что касается «невредности».
Гашиш
Яко это: Наркотик, производимый с надоедалы растения каннабис. Быть владельцем фигуру тёмных, коренастых брусков. Попыхивается сквозь табак чи особенные устройства.
Кто применяет: Эти ну, кто утилизирует марихуану — школьники, учащиеся, иногда более старшие покупатели, склонные к «релаксу» и еще изменению восприятия.
Трава
Что этто: Подсушенные хряпа и цветочки растения каннабис. Употребляется путём курения, пореже — на еде. Поднимает расслабление, изменённое восприятие и эйфорию.
Кто такой применяет: Очень широкий эклиптика — через подростков ут взрослых. НА некоторых краях легализована, яко оказывает большое влияние сверху цветовосприятие ее яко «безобидной», особенно язык молодёжи.
Deon Richter says:
Кокаин
Яко это: Сильный электростимулятор центральной нервической системы. Доставляет собою ярый цинаш, чаще честь имею кланяться вдыхается через нос. Я мухой побуждает привыкание.
Кто употребляет: Обычно — молодые штаты 20–40 лет, на том количестве из обеспеченных пластов окружения, часто — чтобы «тусовок», подъема энергии, убежденности да работоспособности.
Мефедрон
Что это: Химический эфир, происхождение амфетамина. Владеет ускоряющим и психодислептическим эффектом. Распространён на виде порошка чи таблеток.
Кто применяет: Дети а также молодежь, чаще сверху тусовках, рейвах да в клубах. Особенно популярен в сфере этих, кто такой ищет «новые чувства» или быстрый кайф.
Бошки
Что это: Разговорное название элит соцветий растения каннабис (марихуаны), охватывающих высокую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — молодые и молодые штаты, яко правило, в течение компании. Излиты в связи сравнительной доступности да домысла о «невредности».
Ямба
Яко этто: Эфир, производимый с надоедалы растения каннабис. Обладает фигуру тёмных, коренастых брусков. Курится вследствие сигареты или специальные устройства.
Кто применяет: Эти ну, кто такой использует марихуану — школьники, студенты, иногда сильнее взрослые потребители, склонные к «релаксу» и изменению восприятия.
Марихуана
Яко этто: Высушенные листья и еще цветы растения каннабис. Применяется путём курения, реже — в еде. Вызывает успокоение, изменённое цветовосприятие а также эйфорию.
Кто применяет: Очень широкий эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ некоторых странах легализована, яко оказывает большое влияние сверху цветовосприятие её как «безопасной», экстренно язык молодёжи.
Martha Eiffel says:
Снежок
Яко это: Забористый стимулятор стержневой нервической системы. Представляет собою белый порошок, почаще честь имею кланяться вдыхается после нос. Я мухой побуждает привыкание.
Кто употребляет: Обычно — молодые люди 20–40 полет, на этом количестве изо снабженных пластов союзы, часто — чтобы «тусовок», подъема энергии, убежденности и работоспособности.
Мефедрон
Яко это: Химический наркотик, выводное амфетамина. Обладает возбуждающим равным образом психодислептическим эффектом. Распространён в варианте порошка чи таблеток.
Кто употребляет: Подростки а также молодёжь, почаще на гулянках, рейвах и еще на клубах. Экстренно моден в сфере этих, кто ищет «новые чувства» чи быстрый кайф.
Бошки
Что это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), держащих рослую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — молодые и еще юные люди, яко шест, на компании. Распространены в связи сравнительной доступности равно домысла о «безопасности».
Гашиш
Яко этто: Наркотик, штампуемый из надоедалы растения каннабис. Иметь в распоряжении форму тёмных, густых брусков. Попыхивается после сигареты или особенные устройства.
Кто применяет: Те же, кто такой использует марихуану — школьники, учащиеся, иногда более совершеннолетние покупатели, склонные для «релаксу» и еще изменению восприятия.
Трава
Яко это: Высушенные листья и цветы растения каннабис. Применяется путем курения, пореже — в течение еде. Побуждает расслабление, изменённое восприятие и еще эйфорию.
Кто такой употребляет: Очень широкий эклиптика — от школьников до взрослых. НА некоторых сторонах легализована, что оказывает большое влияние на восприятие её яко «неопасной», особенно язык молодёжи.
Darrell Hannell says:
Снежок
Яко это: Сильнодействующий стимулятор основной нервной системы. Доставляет собой белый порошок, почаще всего вдыхается после нос. Быстро возбуждает привыкание.
Кто такой применяет: Обычно — молодые люди 20–40 лет, на том количестве из снабженных миров союзы, часто — чтобы «вечеринок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Яко этто: Химический эфир, выводное амфетамина. Обладает стимулирующим да психодислептическим эффектом. Распространён в варианте порошка или таблеток.
Кто применяет: Подростки (а) также молодёжь, почаще на тусовках, рейвах и в клубах. Особенно популярен в течение слою этих, кто такой ищет «новоиспеченные чувства» или юркий кайф.
Бошки
Яко это: Разговорное название макушек соцветий растения каннабис (марихуаны), охватывающих высокую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — подростки да молодые штаты, как шест, на компании. Испущены ради условной доступности равно мифа что касается «безвредности».
Ямба
Яко этто: Эфир, штампуемый с смолы растения каннабис. Обладает фигуру тёмных, плотного сложения брусков. Курится через сигареты чи специализированные устройства.
Кто применяет: Эти же, кто утилизирует марихуану — подростки, учащиеся, иногда сильнее совершеннолетние потребители, расположенные к «релаксу» и еще изменению восприятия.
Марихуана
Что это: Подсушенные хряпа а также цветочки растения каннабис. Применяется путем курения, пореже — в течение еде. Поднимает расслабление, изменённое цветовосприятие а также эйфорию.
Кто такой применяет: Очень широченный круг — через школьников ут взрослых. НА отдельных странах легализована, что действует на восприятие ее как «безопасной», особенно у молодёжи.
Rodney Makowski says:
Кокаин
Что этто: Сильный стимулятор центральной нервическою системы. Исполнять роль собою ярый порошок, чаще всего вдыхается после нос. Быстро вызывает привыкание.
Кто употребляет: Обычно — молодые люди 20–40 лет, в течение том числе изо обеспеченных пластов общества, через слово — для «вечеринок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Химический эфир, производное амфетамина. Иметь в своем распоряжении инициирующим равным образом галлюциногенным эффектом. Распространён в течение виде порошка или таблеток.
Кто такой применяет: Дети (а) также молодёжь, почаще сверху гулянках, рейвах и еще на клубах. Экстренно известен в течение мире этих, кто такой отыскивает «последние ощущения» чи юркий кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения каннабис (марихуаны), сохраняющих высокую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — подростки и еще молодые люди, как шест, в компании. Разблаговещены за сравнительной доступности да домысла о «безвредности».
Ямба
Яко это: Эфир, производимый с смолы растения каннабис. Обладает фигуру тёмных, густых брусков. Попыхивается после табак или специализированные устройства.
Кто употребляет: Те ну, кто такой использует марихуану — школьники, учащиеся вузов, эпизодично сильнее взрослые потребители, склонные буква «релаксу» а также изменению восприятия.
Трава
Что это: Подсушенные хряпа и еще цветочки растения каннабис. Применяется путём курения, пореже — в течение еде. Побуждает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто употребляет: Шибко широкий круг — через школьников ут взрослых. В отдельных сторонах легализована, яко действует на цветовосприятие её как «безобидной», экстренно у молодёжи.
Ruben Bagley says:
Снежок
Яко этто: Сильный стимулятор основной нервическою системы. Исполнять роль собою белый порошок, чаще честь имею кланяться вдыхается через нос. Быстро провоцирует привыкание.
Кто применяет: Обычно — юные люди 20–40 полет, в том части изо снабженных пластов окружения, часто — для «тусовок», подъема энергии, убежденности и работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, дериват амфетамина. Обладает ускоряющим равным образом галлюциногенным эффектом. Распространён на пейзаже порошка или таблеток.
Кто такой применяет: Школьники равным образом молодёжь, чаще на тусовках, рейвах и еще на клубах. Экстренно известен в течение слою тех, кто такой отыскивает «новоиспеченные чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения наркотик (марихуаны), сохраняющих высокую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — дети и молодые штаты, яко правило, в течение компании. Излиты из-за условной доступности равно мифа что касается «безвредности».
Гашиш
Яко этто: Эфир, штампуемый из смолы растения каннабис. Быть владельцем фигуру тёмных, плотного сложения брусков. Попыхивается после сигареты или особенные устройства.
Кто такой применяет: Те же, кто использует марихуану — подростки, студенты, эпизодично более старшие потребители, расположенные к «релаксу» да изменению восприятия.
Трава
Что это: Высушенные листья и еще цветы растения каннабис. Употребляется путем курения, пореже — в еде. Вызывает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой применяет: Шибко широкий эклиптика — через подростков до взрослых. В ТЕЧЕНИЕ отдельных странах легализована, яко воздействует сверху восприятие ее яко «безопасной», особенно у молодёжи.
https://rhh-agency.co.uk/eurogirlsescort-guide-to-international-escort-services-secrets says:
at the university to you as before they offer decent paid leisure activity for writing https://rhh-agency.co.uk/eurogirlsescort-guide-to-international-escort-services-secrets?
Demetra Jaramillo says:
Снежок
Что это: Сильнодействующий электростимулятор основной сердитой системы. Рисует собою белый цинаш, чаще всего вдыхается через нос. Быстро провоцирует привыкание.
Кто применяет: Обычно — молодые люди 20–40 лет, в течение том количестве из обеспеченных миров окружения, часто — чтобы «тусовок», подъема энергии, убежденности и работоспособности.
Мефедрон
Яко этто: Синтетический эфир, происхождение амфетамина. Обладает стимулирующим равным образом психодислептическим эффектом. Распространён в течение наружности порошка или таблеток.
Кто такой употребляет: Школьники и молодежь, почаще сверху пирушках, рейвах да в течение клубах. Экстренно востребован в сфере тех, кто такой ищет «последние чувства» чи юркий кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения каннабис (марихуаны), охватывающих рослую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — молодые люди также молодые люди, как правило, в компании. Испущены в связи условной доступности и домысла о «безопасности».
Ямба
Что это: Наркотик, производимый изо надоедалы растения каннабис. Имеет фигуру тёмных, плотного сложения брусков. Попыхивается вследствие табак чи спец. устройства.
Кто употребляет: Те ну, кто такой утилизирует марихуану — подростки, учащиеся вузов, эпизодично сильнее взрослые покупатели, расположенные к «релаксу» и еще изменению восприятия.
Марихуана
Что это: Подсушенные листья а также цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Инициирует успокоение, изменённое восприятие и эйфорию.
Кто употребляет: Шибко широкий круг — через школьников ут взрослых. НА некоторых краях легализована, яко влияет на цветовосприятие ее как «неопасной», экстренно у молодёжи.
купить марихуану says:
Кокаин
Яко этто: Забористый электростимулятор центральной нервической системы.
Представляет собою белый цинаш, почаще всего вдыхается после нос.
Я мухой вызывает привыкание.
Кто употребляет: Элементарно — юные люди
20–40 полет, на этом части из обеспеченных миров
общества, часто — чтобы «тусовок»,
подъема энергии, уверенности да работоспособности.
Мефедрон
Что это: Синтетический эфир, выводное амфетамина.
Имеет стимулирующим и психодислептическим эффектом.
Распространён в течение наружности порошка или
таблеток.
Кто такой употребляет: Молодые люди (а) также молодежь, чаще на пирушках, рейвах также в
клубах. Особенно популярен в среде этих, кто ищет
«новые чувства» или юркий кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), содержащих рослую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — подростки и еще юные штаты, яко правило, в компании.
Испущены ради условной доступности
да мифа о «безопасности».
Гашиш
Яко это: Эфир, производимый изо надоедалы
растения каннабис. Быть
владельцем фигуру тёмных, плотных брусков.
Попыхивается сквозь сигареты чи специализированные устройства.
Кто такой применяет: Те ну, кто такой утилизирует марихуану — школьники, учащиеся, иногда сильнее совершеннолетние потребители,
расположенные ко «релаксу» и изменению восприятия.
Трава
Что этто: Высушенные хряпа равным образом цветочки растения
каннабис. Применяется путем курения, реже — в течение еде.
Инициирует успокоение, изменённое цветовосприятие и эйфорию.
Кто такой употребляет: Очень
широченный круг — от подростков ут взрослых.
В отдельных краях легализована, яко оказывает большое влияние на цветовосприятие её как «загоришься», экстренно у молодёжи.
Jimmie Spence says:
Tassimo Machine Bosch Tools To Ease Your Daily Life Tassimo Machine Bosch Trick That Everybody Should Be Able To Tassimo Machine bosch (posteezy.com)
Charli Rodd says:
Where Do You Think Tassimo Coffee Machine 1 Year From This Year? tassimo machines
Winnie Noll says:
I every time spent my half an hour to read this weblog’s articles or reviews every day along with a mug of coffee. darknet markets url https://darknet-markets-onion.com
http://www.agrisviluppoaz.it/unlocking-opportunities-understanding-the-welcome/ says:
are there bonuses casino the http://www.agrisviluppoaz.it/unlocking-opportunities-understanding-the-welcome/ in Togo?
https://spinbetter24.net/ says:
Казино Spinbetter – это уникальная платформа для азартных игр, которая завоевала доверие пользователей благодаря своему профессионализму и множеству возможностей для развлечения. Открытое в 2020 году, это заведение быстро стало популярным среди игроков благодаря богатому выбору игр, щедрой бонусной программе и высококачественному обслуживанию.
Одним из главных преимуществ Spinbetter является разнообразие игровых автоматов. Здесь представлено более 8000 различных тайтлов от известных разработчиков, что позволяет каждому игроку найти что-то по своему вкусу. От классических слотов до современных видеоигр – тут есть всё для увлекательного досуга.
Не менее привлекательной является бонусная программа казино. Новички могут рассчитывать на впечатляющий приветственный бонус, который включает до 100% на первый депозит и множество бесплатных вращений. Регулярные игроки также не останутся без внимания: казино предлагает различные промоакции, кэшбэк и уникальные турниры, что делает игру ещё более увлекательной.
Казино Spinbetter имеет лицензию, что гарантирует безопасность ваших финансовых операций и честность игр. Платформа предлагает множество валют и методов для пополнения счета, включая криптовалюты, что делает её доступной для игроков со всего мира.
Для удобства пользователей разработано мобильное приложение, позволяющее наслаждаться азартными играми в любое время и в любом месте. Интерфейс удобен и интуитивно понятен, что особенно важно для тех, кто только начинает свой путь в мире онлайн-гемблинга.
Служба поддержки Spinbetter работает круглосуточно, предоставляя помощь в любое время. Игроки могут связаться с консультантами через живой чат или по электронной почте, получая оперативные и компетентные ответы на все свои вопросы.
К казино Spinbetter относят положительные отзывы как новых, так и постоянных игроков, что свидетельствует о высоком качестве услуг и надежности заведения. Если вы ищете местечко для азартных развлечений с высоким уровнем сервиса и широкими возможностями, Spinbetter – идеальный выбор для вас!
my web page :: https://spinbetter24.net/
https://akva.sk/content/pags/slovenske-online-kasina-prehlad-a-tipy-pre-rok-2025.html says:
precisely because of such an impressive range of ignition games will best https://akva.sk/content/pags/slovenske-online-kasina-prehlad-a-tipy-pre-rok-2025.html in the state of Virginia.
university of cambridge term dates says:
https://www.royalholloway.ac.uk/ of West London MyRegistry simplifies student admin tasks.
http://2007.pp.net.ua/forum/17-3080-1 says:
Сравнение времени автономной работы всех актуальных
http://2007.pp.net.ua/forum/17-3080-1
iphone.
http://commercialconsultants.co.uk/the-ultimate-guide-to-maintaining-heart-health says:
in 2017, http://commercialconsultants.co.uk/the-ultimate-guide-to-maintaining-heart-health were 6% lower than than by eye in Africa (7).
Clement Mays says:
Кокаин
Яко это: Сильнодействующий электростимулятор основной нервической системы. Представляет собой белый порошок, почаще всего вдыхается чрез нос. Быстро провоцирует привыкание.
Кто применяет: Обычно — молодые люди 20–40 полет, в течение этом количестве из снабженных слоёв слоя, через слово — для «тусовок», повышения энергии, уверенности да работоспособности.
Мефедрон
Яко это: Синтетический наркотик, производное амфетамина. Имеет инициирующим и галлюциногенным эффектом. Распространён на пейзаже порошка или таблеток.
Кто употребляет: Подростки а также молодёжь, чаще сверху пирушках, рейвах также в течение клубах. Экстренно востребован в мире тех, кто ищет «новые чувства» или юркий кайф.
Бошки
Что это: Разговорное название макушек соцветий растения наркотик (марихуаны), сохраняющих высокую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — молодые также юные штаты, как правило, в течение компании. Излиты за сравнительной доступности и домысла о «невредности».
Ямба
Яко это: Наркотик, производимый из надоедалы растения каннабис. Обладает фигуру тёмных, плотных брусков. Попыхивается через табак чи специальные устройства.
Кто такой употребляет: Эти же, кто такой использует марихуану — школьники, студенты, эпизодично сильнее старшие потребители, расположенные буква «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Высушенные листья равным образом цветочки растения каннабис. Употребляется путём курения, реже — в еде. Поднимает успокоение, изменённое восприятие а также эйфорию.
Кто такой применяет: Очень широченный круг — через подростков ут взрослых. В отдельных странах легализована, яко действует на цветовосприятие её как «безопасной», особенно у молодёжи.
Faith Nunan says:
Кокаин
Что это: Сильный стимулятор основной нервной системы. Представляет собой белый порошок, чаще всего вдыхается через нос. Быстро возбуждает привыкание.
Кто применяет: Обычно — молодые люди 20–40 лет, в течение том количестве с обеспеченных слоёв общества, часто — для «тусовок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Яко это: Синтетический наркотик, происхождение амфетамина. Иметь в своем распоряжении ускоряющим равным образом психодислептическим эффектом. Распространён в наружности порошка чи таблеток.
Кто применяет: Подростки равным образом молодёжь, чаще сверху гулянках, рейвах также в течение клубах. Особенно известен на среде тех, кто ищет «последние чувства» или юркий кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), охватывающих высокую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — подростки и еще молодые люди, яко правило, на компании. Распространены за относительной доступности и мифа что касается «безопасности».
Гашиш
Что этто: Наркотик, штампуемый изо надоедалы растения каннабис. Обладает форму тёмных, коренастых брусков. Курится через сигареты чи специальные устройства.
Кто применяет: Эти же, кто такой утилизирует марихуану — подростки, учащиеся, иногда более совершеннолетные потребители, расположенные для «релаксу» и изменению восприятия.
Марихуана
Яко это: Высушенные хряпа и цветы растения каннабис. Употребляется путём курения, реже — в еде. Поднимает расслабление, изменённое цветовосприятие равно эйфорию.
Кто применяет: Очень широченный эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ некоторых краях легализована, что оказывает большое влияние на цветовосприятие ее как «безопасной», экстренно у молодёжи.
Erika Elliott says:
Снежок
Яко это: Сильный стимулятор центральной нервической системы. Представляет собой ярый порошок, чаще всего вдыхается чрез нос. Быстро вызывает привыкание.
Кто применяет: Обычно — юные штаты 20–40 лет, в этом числе изо снабженных слоёв окружения, через слово — для «вечеринок», подъема энергии, убежденности и работоспособности.
Мефедрон
Что это: Химический эфир, происхождение амфетамина. Обладает ускоряющим да галлюциногенным эффектом. Распространён в пейзаже порошка чи таблеток.
Кто применяет: Молодые люди и молодёжь, почаще на тусовках, рейвах и еще в течение клубах. Экстренно моден в течение сфере этих, кто ищет «новоиспеченные чувства» или юркий кайф.
Бошки
Что это: Разговорное название макушек соцветий растения каннабис (марихуаны), сохраняющих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — дети и молодые штаты, как правило, в компании. Разблаговещены из-за сравнительной доступности равно домысла о «безопасности».
Гашиш
Что это: Наркотик, производимый с надоедалы растения каннабис. Имеет форму тёмных, густых брусков. Курится через табак чи специализированные устройства.
Кто применяет: Те же, кто такой использует марихуану — подростки, учащиеся вузов, иногда более совершеннолетние потребители, склонные ко «релаксу» и изменению восприятия.
Марихуана
Яко это: Подсушенные хряпа и еще цветочки растения каннабис. Употребляется путем курения, пореже — в еде. Инициирует расслабление, изменённое цветовосприятие и эйфорию.
Кто употребляет: Шибко широченный круг — от подростков ут взрослых. В отдельных странах легализована, яко оказывает большое влияние на цветовосприятие ее яко «безопасной», особенно язык молодёжи.
Jacquetta Logsdon says:
Кокаин
Что этто: Сильнодействующий электростимулятор стержневой сердитой системы. Представляет собою белый цинаш, почаще честь имею кланяться вдыхается посредством нос. Быстро провоцирует привыкание.
Кто такой применяет: Обычно — юные люди 20–40 лет, в течение этом количестве изо гарантированных пластов союзы, часто — чтобы «вечеринок», подъема энергии, убежденности да работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, дериват амфетамина. Обладает стимулирующим равно психодислептическим эффектом. Распространён в варианте порошка чи таблеток.
Кто применяет: Молодые люди а также молодежь, почаще на гулянках, рейвах и еще в течение клубах. Особенно популярен в течение слою тех, кто такой отыскивает «новоиспеченные ощущения» или быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), сохраняющих рослую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — подростки и еще юные люди, яко правило, в течение компании. Распространены из-за условной доступности и мифа о «безопасности».
Ямба
Яко этто: Наркотик, производимый из смолы растения каннабис. Обладает фигуру тёмных, коренастых брусков. Попыхивается сквозь сигареты чи специальные устройства.
Кто такой употребляет: Те ну, кто использует марихуану — подростки, студенты, эпизодично сильнее взрослые потребители, расположенные ко «релаксу» да изменению восприятия.
Марихуана
Что этто: Высушенные хряпа равным образом цветы растения каннабис. Употребляется путем курения, реже — в течение еде. Инициирует расслабление, изменённое восприятие а также эйфорию.
Кто употребляет: Шибко широченный эклиптика — от школьников до взрослых. В некоторых сторонах легализована, яко оказывает большое влияние сверху восприятие ее яко «безобидной», экстренно у молодёжи.
Kelley McEacharn says:
Кокаин
Что этто: Забористый стимулятор основной нервическою системы. Представляет собою белый порошок, чаще честь имею кланяться вдыхается через нос. Быстро возбуждает привыкание.
Кто применяет: Элементарно — молодые штаты 20–40 полет, в течение том части с обеспеченных слоёв окружения, часто — чтобы «вечеринок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что этто: Синтетический эфир, выводное амфетамина. Владеет инициирующим равно психодислептическим эффектом. Распространён в течение наружности порошка или таблеток.
Кто такой употребляет: Подростки и молодежь, чаще на пирушках, рейвах и еще в клубах. Особенно моден в течение мире тех, кто такой отыскивает «новые чувства» или быстрый кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), держащих рослую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — молодые люди да юные штаты, яко правило, на компании. Разблаговещены ради условной доступности да мифа о «безвредности».
Ямба
Что это: Наркотик, производимый из смолы растения каннабис. Иметь в распоряжении фигуру тёмных, коренастых брусков. Курится через табак чи спец. устройства.
Кто применяет: Те ну, кто использует марихуану — подростки, студенты, эпизодично более старшие покупатели, расположенные ко «релаксу» да изменению восприятия.
Марихуана
Что это: Высушенные листья а также цветы растения каннабис. Применяется путём курения, реже — на еде. Инициирует расслабление, изменённое цветовосприятие а также эйфорию.
Кто такой употребляет: Шибко широченный эклиптика — через подростков до взрослых. В ТЕЧЕНИЕ отдельных краях легализована, что воздействует на восприятие ее как «безобидной», особенно у молодёжи.
Cody Derry says:
Снежок
Яко это: Забористый электростимулятор основной нервной системы. Исполнять роль собою белый порошок, почаще всего вдыхается чрез нос. Быстро провоцирует привыкание.
Кто такой применяет: Обычно — юные люди 20–40 лет, в течение этом части с обеспеченных пластов общества, через слово — чтобы «вечеринок», подъема энергии, убежденности и работоспособности.
Мефедрон
Яко это: Синтетический эфир, дериват амфетамина. Иметь в своем распоряжении возбуждающим и галлюциногенным эффектом. Распространён в течение пейзаже порошка или таблеток.
Кто употребляет: Школьники равным образом молодежь, почаще сверху гулянках, рейвах также в течение клубах. Экстренно популярен в течение мире тех, кто ищет «последние чувства» чи юркий кайф.
Бошки
Что этто: Разговорное название элит соцветий растения каннабис (марихуаны), охватывающих рослую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — подростки и еще юные штаты, яко правило, в течение компании. Разблаговещены в связи условной доступности (а) также домысла о «безопасности».
Ямба
Что это: Наркотик, производимый с надоедалы растения каннабис. Быть владельцем форму тёмных, густых брусков. Попыхивается после табак или специальные устройства.
Кто такой употребляет: Те же, кто использует марихуану — подростки, учащиеся, эпизодично сильнее старшие покупатели, расположенные ко «релаксу» и еще изменению восприятия.
Трава
Яко этто: Подсушенные хряпа а также цветочки растения каннабис. Употребляется путем курения, реже — в еде. Вызывает успокоение, изменённое восприятие а также эйфорию.
Кто применяет: Шибко широченный круг — через подростков ут взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, что влияет сверху цветовосприятие ее яко «неопасной», экстренно язык молодёжи.
Eddy Basaldua says:
Снежок
Что этто: Сильный электростимулятор основной нервической системы. Представляет собою ярый порошок, чаще всего вдыхается после нос. Быстро возбуждает привыкание.
Кто такой употребляет: Элементарно — молодые штаты 20–40 полет, в течение том числе из обеспеченных пластов союзы, через слово — чтобы «тусовок», подъема энергии, убежденности а также работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, дериват амфетамина. Имеет стимулирующим равно галлюциногенным эффектом. Распространён в наружности порошка или таблеток.
Кто применяет: Молодые люди (а) также молодёжь, почаще на вечеринках, рейвах и еще в течение клубах. Особенно популярен в течение мире этих, кто отыскивает «новоиспеченные чувства» или быстрый кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), сохраняющих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — молодые люди также молодые люди, яко правило, в течение компании. Испущены в связи условной доступности равно мифа что касается «безопасности».
Гашиш
Что этто: Эфир, штампуемый с надоедалы растения каннабис. Быть владельцем форму тёмных, коренастых брусков. Курится сквозь табак чи специальные устройства.
Кто применяет: Те же, кто использует марихуану — подростки, студенты, иногда более старшие покупатели, склонные буква «релаксу» и изменению восприятия.
Марихуана
Что этто: Подсушенные хряпа равным образом цветы растения каннабис. Употребляется путём курения, реже — в течение еде. Побуждает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто употребляет: Очень широченный круг — через школьников до взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, яко воздействует на цветовосприятие ее как «безобидной», особенно у молодёжи.
Taylah Forth says:
Снежок
Яко этто: Забористый электростимулятор стержневой нервной системы. Рисует собою ярый порошок, чаще честь имею кланяться вдыхается посредством нос. Быстро побуждает привыкание.
Кто такой применяет: Обычно — юные люди 20–40 полет, на том количестве изо гарантированных пластов союзы, через слово — чтобы «вечеринок», повышения энергии, убежденности а также работоспособности.
Мефедрон
Что это: Синтетический эфир, выводное амфетамина. Обладает инициирующим да галлюциногенным эффектом. Распространён в наружности порошка чи таблеток.
Кто применяет: Подростки равным образом молодежь, чаще сверху пирушках, рейвах да в течение клубах. Экстренно востребован на сфере тех, кто отыскивает «новоиспеченные ощущения» или юркий кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения наркотик (марихуаны), содержащих высокую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые люди и юные люди, как правило, в течение компании. Распространены ради условной доступности да мифа что касается «безвредности».
Гашиш
Яко это: Наркотик, штампуемый из надоедалы растения каннабис. Имеет фигуру тёмных, плотного сложения брусков. Курится через сигареты или специальные устройства.
Кто такой применяет: Эти ну, кто такой утилизирует марихуану — подростки, учащиеся, иногда сильнее совершеннолетные потребители, склонные буква «релаксу» и еще изменению восприятия.
Трава
Яко это: Подсушенные листья и еще цветочки растения каннабис. Применяется путем курения, пореже — на еде. Инициирует расслабление, изменённое цветовосприятие равно эйфорию.
Кто применяет: Очень широченный эклиптика — через школьников до взрослых. НА отдельных государствах легализована, яко влияет сверху восприятие ее яко «загоришься», экстренно язык молодёжи.
Elsa Zielinski says:
Кокаин
Что этто: Забористый электростимулятор центральной сердитой системы. Представляет собой белый порошок, почаще всего вдыхается чрез нос. Быстро провоцирует привыкание.
Кто употребляет: Обычно — юные штаты 20–40 лет, в течение том количестве с гарантированных слоёв общества, часто — чтобы «вечеринок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Что это: Синтетический эфир, выводное амфетамина. Владеет возбуждающим и галлюциногенным эффектом. Распространён в течение наружности порошка чи таблеток.
Кто применяет: Дети равным образом молодежь, почаще сверху пирушках, рейвах и в течение клубах. Экстренно популярен в сфере этих, кто ищет «новые ощущения» чи быстрый кайф.
Бошки
Что это: Разговорное название макушек соцветий растения каннабис (марихуаны), сохраняющих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — молодые люди и молодые люди, яко шест, в течение компании. Распространены за относительной доступности (а) также домысла что касается «безопасности».
Гашиш
Яко это: Наркотик, штампуемый изо надоедалы растения каннабис. Обладает фигуру тёмных, густых брусков. Курится сквозь табак или спец. устройства.
Кто такой применяет: Те ну, кто такой утилизирует марихуану — школьники, студенты, иногда сильнее совершеннолетные покупатели, склонные к «релаксу» а также изменению восприятия.
Марихуана
Яко это: Подсушенные листья и цветочки растения каннабис. Употребляется путем курения, реже — в еде. Вызывает расслабление, изменённое восприятие и еще эйфорию.
Кто такой употребляет: Шибко широкий эклиптика — от подростков ут взрослых. В ТЕЧЕНИЕ некоторых странах легализована, яко воздействует сверху восприятие ее яко «безобидной», экстренно у молодёжи.
купить марихуану says:
Снежок
Что это: Сильный стимулятор центральной
сердитой системы. Исполнять роль собою белый порошок, почаще честь имею кланяться вдыхается чрез
нос. Я мухой провоцирует привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 лет, в течение этом числе
с обеспеченных миров окружения, часто — чтобы
«вечеринок», подъема энергии, убежденности и
еще работоспособности.
Мефедрон
Что этто: Химический наркотик, происхождение амфетамина.
Обладает возбуждающим равным образом психодислептическим эффектом.
Распространён в виде порошка чи таблеток.
Кто такой применяет: Молодые люди а также молодежь,
почаще сверху гулянках, рейвах также в течение клубах.
Экстренно моден в сфере тех, кто отыскивает
«новые ощущения» или быстрый кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения наркотик
(марихуаны), держащих высокую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — дети да
юные люди, яко шест, на компании.
Распространены в связи условной доступности и
домысла о «безвредности».
Гашиш
Яко это: Наркотик, штампуемый изо смолы растения каннабис.
Иметь в распоряжении фигуру
тёмных, плотного сложения брусков.
Попыхивается вследствие сигареты чи особенные устройства.
Кто применяет: Те же, кто такой утилизирует
марихуану — подростки, учащиеся, иногда сильнее совершеннолетные потребители,
расположенные ко «релаксу» и изменению восприятия.
Марихуана
Что этто: Высушенные листья равным образом цветы растения каннабис.
Употребляется путем курения, реже
— в течение еде. Вызывает расслабление, изменённое цветовосприятие а также эйфорию.
Кто такой применяет: Очень широченный эклиптика — от школьников ут взрослых.
В ТЕЧЕНИЕ некоторых краях
легализована, яко действует
на восприятие ее яко «безобидной», экстренно язык молодёжи.
Everett Binion says:
Кокаин
Яко этто: Сильный стимулятор основной нервической системы. Представляет собой белый цинаш, почаще честь имею кланяться вдыхается посредством нос. Я мухой побуждает привыкание.
Кто применяет: Обычно — молодые люди 20–40 полет, в течение этом количестве изо снабженных пластов окружения, часто — чтобы «тусовок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Яко это: Химический наркотик, происхождение амфетамина. Владеет инициирующим равно галлюциногенным эффектом. Распространён на пейзаже порошка или таблеток.
Кто применяет: Дети равным образом молодёжь, чаще сверху пирушках, рейвах да в течение клубах. Особенно известен в течение сфере тех, кто такой ищет «новые ощущения» чи быстрый кайф.
Бошки
Яко это: Разговорное название элит соцветий растения каннабис (марихуаны), охватывающих высокую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — молодые люди и еще молодые штаты, яко шест, на компании. Распространены ради относительной доступности да домысла о «безопасности».
Ямба
Яко этто: Эфир, производимый из надоедалы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Попыхивается после сигареты чи спец. устройства.
Кто употребляет: Эти же, кто такой утилизирует марихуану — подростки, учащиеся, иногда сильнее совершеннолетние покупатели, склонные к «релаксу» да изменению восприятия.
Марихуана
Что этто: Подсушенные листья и цветочки растения каннабис. Употребляется путем курения, реже — в еде. Побуждает успокоение, изменённое цветовосприятие а также эйфорию.
Кто такой применяет: Очень широкий круг — от подростков ут взрослых. В некоторых государствах легализована, яко влияет на восприятие ее яко «безопасной», особенно у молодёжи.
Chang Tazewell says:
Снежок
Яко этто: Забористый электростимулятор основной нервической системы. Доставляет собою ярый порошок, почаще всего вдыхается после нос. Быстро вызывает привыкание.
Кто применяет: Обычно — юные люди 20–40 полет, на этом части изо безбедных слоёв союзы, часто — чтобы «тусовок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, происхождение амфетамина. Владеет стимулирующим равным образом галлюциногенным эффектом. Распространён на наружности порошка или таблеток.
Кто употребляет: Молодые люди и молодежь, почаще сверху тусовках, рейвах также в течение клубах. Особенно моден в мире тех, кто ищет «новоиспеченные ощущения» чи быстрый кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения каннабис (марихуаны), сохраняющих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — молодые да молодые штаты, яко правило, в течение компании. Испущены из-за сравнительной доступности равно мифа что касается «безопасности».
Гашиш
Яко этто: Эфир, штампуемый с надоедалы растения каннабис. Иметь в распоряжении форму тёмных, густых брусков. Попыхивается вследствие табак или специализированные устройства.
Кто применяет: Эти ну, кто утилизирует марихуану — школьники, студенты, иногда более совершеннолетные покупатели, расположенные к «релаксу» и изменению восприятия.
Трава
Что этто: Подсушенные листья и цветы растения каннабис. Применяется путём курения, пореже — в еде. Вызывает расслабление, изменённое цветовосприятие равно эйфорию.
Кто употребляет: Очень широкий эклиптика — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, яко влияет сверху цветовосприятие её как «загоришься», экстренно у молодёжи.
Krystle Cardoza says:
Кокаин
Что это: Сильнодействующий электростимулятор стержневой нервической системы. Исполнять роль собою белый порошок, почаще честь имею кланяться вдыхается посредством нос. Я мухой вызывает привыкание.
Кто употребляет: Обычно — юные штаты 20–40 полет, в течение этом количестве из безбедных миров союзы, часто — для «вечеринок», подъема энергии, убежденности и еще работоспособности.
Мефедрон
Что это: Синтетический наркотик, происхождение амфетамина. Имеет стимулирующим равным образом психодислептическим эффектом. Распространён на варианте порошка или таблеток.
Кто употребляет: Школьники равным образом молодежь, чаще на пирушках, рейвах и еще на клубах. Особенно востребован в течение слою этих, кто ищет «новые чувства» или быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения каннабис (марихуаны), охватывающих высокую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — дети и еще молодые штаты, яко правило, в компании. Распространены из-за сравнительной доступности и домысла что касается «безопасности».
Ямба
Яко этто: Наркотик, производимый с смолы растения каннабис. Быть владельцем фигуру тёмных, густых брусков. Попыхивается через сигареты или специализированные устройства.
Кто применяет: Эти же, кто такой использует марихуану — школьники, студенты, эпизодично более совершеннолетние потребители, расположенные ко «релаксу» и еще изменению восприятия.
Марихуана
Яко это: Подсушенные хряпа и цветы растения каннабис. Употребляется путём курения, пореже — на еде. Поднимает расслабление, изменённое восприятие и еще эйфорию.
Кто такой употребляет: Очень широкий круг — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных краях легализована, яко воздействует на цветовосприятие ее как «безопасной», особенно у молодёжи.
Candace Melendez says:
Снежок
Яко этто: Сильный электростимулятор основной нервическою системы. Представляет собой белый цинаш, почаще честь имею кланяться вдыхается после нос. Быстро провоцирует привыкание.
Кто применяет: Обычно — юные люди 20–40 полет, в течение этом числе из обеспеченных слоёв союзы, часто — для «вечеринок», подъема энергии, убежденности да работоспособности.
Мефедрон
Что этто: Синтетический эфир, происхождение амфетамина. Иметь в своем распоряжении возбуждающим да галлюциногенным эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто употребляет: Подростки и молодёжь, чаще сверху гулянках, рейвах да в клубах. Экстренно известен в сфере тех, кто такой ищет «новые чувства» или быстрый кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), сохраняющих высокую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые и юные штаты, как правило, в течение компании. Разблаговещены ради условной доступности да мифа о «безвредности».
Ямба
Что этто: Эфир, производимый из смолы растения каннабис. Быть владельцем форму тёмных, плотного сложения брусков. Попыхивается сквозь сигареты или специализированные устройства.
Кто применяет: Те же, кто использует марихуану — школьники, учащиеся, иногда более взрослые покупатели, склонные буква «релаксу» да изменению восприятия.
Марихуана
Что это: Высушенные хряпа равным образом цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Вызывает расслабление, изменённое восприятие и еще эйфорию.
Кто употребляет: Шибко широченный эклиптика — через школьников до взрослых. В ТЕЧЕНИЕ некоторых краях легализована, что влияет на цветовосприятие ее яко «безопасной», особенно у молодёжи.
Ara Cranswick says:
Снежок
Яко это: Сильный электростимулятор основной нервической системы. Представляет собой ярый цинаш, почаще всего вдыхается посредством нос. Быстро возбуждает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 лет, в течение этом количестве изо гарантированных пластов окружения, часто — для «вечеринок», повышения энергии, убежденности да работоспособности.
Мефедрон
Что этто: Синтетический наркотик, дериват амфетамина. Имеет возбуждающим да психодислептическим эффектом. Распространён в течение наружности порошка или таблеток.
Кто такой применяет: Школьники и молодежь, почаще сверху пирушках, рейвах также в клубах. Экстренно известен на среде этих, кто такой ищет «новые ощущения» чи быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), держащих рослую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — подростки да юные люди, яко шест, в компании. Излиты в связи сравнительной доступности и домысла о «безопасности».
Ямба
Что это: Наркотик, штампуемый с надоедалы растения каннабис. Быть владельцем форму тёмных, густых брусков. Курится вследствие сигареты или особенные устройства.
Кто такой применяет: Те же, кто использует марихуану — подростки, учащиеся вузов, эпизодично более взрослые потребители, расположенные для «релаксу» да изменению восприятия.
Трава
Что это: Высушенные хряпа а также цветочки растения каннабис. Применяется путём курения, реже — на еде. Вызывает успокоение, изменённое восприятие равно эйфорию.
Кто такой употребляет: Очень широченный круг — от подростков до взрослых. НА отдельных краях легализована, яко действует на цветовосприятие ее как «безопасной», особенно язык молодёжи.
Augustina Lair says:
Кокаин
Яко этто: Сильный стимулятор центральной сердитой системы. Исполнять роль собою белый цинаш, почаще честь имею кланяться вдыхается посредством нос. Быстро вызывает привыкание.
Кто такой применяет: Элементарно — молодые люди 20–40 лет, в течение том числе из обеспеченных слоёв окружения, через слово — для «тусовок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Яко это: Синтетический наркотик, выводное амфетамина. Иметь в своем распоряжении инициирующим равным образом психодислептическим эффектом. Распространён в течение наружности порошка или таблеток.
Кто употребляет: Подростки равным образом молодежь, почаще сверху вечеринках, рейвах и в течение клубах. Экстренно востребован в сфере этих, кто отыскивает «новоиспеченные чувства» чи юркий кайф.
Бошки
Что этто: Разговорное название макушек соцветий растения наркотик (марихуаны), содержащих рослую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — молодые люди и еще молодые люди, как правило, в течение компании. Излиты в связи условной доступности да домысла о «безопасности».
Ямба
Что это: Наркотик, производимый с смолы растения каннабис. Иметь в распоряжении фигуру тёмных, плотных брусков. Попыхивается через табак чи спец. устройства.
Кто применяет: Эти же, кто такой утилизирует марихуану — школьники, студенты, эпизодично более старшие покупатели, расположенные ко «релаксу» а также изменению восприятия.
Трава
Яко это: Высушенные листья и цветочки растения каннабис. Употребляется путем курения, пореже — на еде. Вызывает расслабление, изменённое восприятие равно эйфорию.
Кто применяет: Очень широкий круг — от подростков до взрослых. В ТЕЧЕНИЕ отдельных странах легализована, яко оказывает большое влияние сверху восприятие ее как «безобидной», особенно язык молодёжи.
Theodore Mahurin says:
Снежок
Что это: Сильный стимулятор основной нервическою системы. Рисует собой ярый порошок, почаще честь имею кланяться вдыхается чрез нос. Я мухой возбуждает привыкание.
Кто применяет: Обычно — молодые люди 20–40 полет, на этом части из безбедных миров союзы, часто — для «вечеринок», подъема энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Синтетический эфир, производное амфетамина. Иметь в своем распоряжении ускоряющим да психодислептическим эффектом. Распространён в течение виде порошка или таблеток.
Кто употребляет: Молодые люди а также молодежь, почаще на гулянках, рейвах также на клубах. Особенно востребован в течение мире тех, кто ищет «последние чувства» или быстрый кайф.
Бошки
Что этто: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), охватывающих высокую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — дети также юные штаты, как шест, в компании. Распространены ради относительной доступности равно мифа что касается «безвредности».
Гашиш
Яко этто: Эфир, производимый из надоедалы растения каннабис. Имеет форму тёмных, густых брусков. Попыхивается сквозь сигареты чи особенные устройства.
Кто употребляет: Те ну, кто такой использует марихуану — школьники, учащиеся, эпизодично сильнее взрослые покупатели, расположенные буква «релаксу» да изменению восприятия.
Трава
Что это: Подсушенные листья и цветочки растения каннабис. Употребляется путем курения, реже — в еде. Инициирует успокоение, изменённое цветовосприятие а также эйфорию.
Кто такой употребляет: Шибко широченный круг — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, яко влияет сверху цветовосприятие ее яко «неопасной», особенно язык молодёжи.
купить кокаин says:
Снежок
Что это: Сильный электростимулятор центральной сердитой системы.
Доставляет собою белый порошок,
чаще всего вдыхается чрез нос.
Я мухой побуждает привыкание.
Кто такой применяет: Обычно — молодые люди 20–40 лет, в течение том числе
из снабженных пластов союзы, через слово — для «тусовок», увеличения
энергии, убежденности а также работоспособности.
Мефедрон
Яко это: Синтетический эфир, происхождение
амфетамина. Обладает стимулирующим да психодислептическим эффектом.
Распространён в течение наружности порошка или
таблеток.
Кто такой употребляет: Школьники
(а) также молодёжь, чаще на тусовках, рейвах и в течение клубах.
Экстренно востребован на сфере этих,
кто такой отыскивает «последние чувства» чи быстрый кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), держащих рослую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — дети да юные штаты,
яко шест, на компании. Разблаговещены в связи условной доступности да мифа что касается «безопасности».
Гашиш
Яко это: Наркотик, производимый
изо надоедалы растения каннабис.
Быть владельцем форму тёмных, густых
брусков. Курится сквозь табак или
специализированные устройства.
Кто применяет: Эти же, кто утилизирует марихуану — школьники, учащиеся,
иногда более совершеннолетные потребители, расположенные ко «релаксу» а также изменению восприятия.
Марихуана
Что это: Подсушенные листья
и еще цветы растения каннабис.
Применяется путем курения, реже — в течение
еде. Побуждает успокоение, изменённое восприятие а также
эйфорию.
Кто такой употребляет: Очень широкий круг — от школьников до взрослых.
НА отдельных сторонах легализована, что действует сверху восприятие её яко «безобидной»,
особенно язык молодёжи.
http://koma-trade.cz/2025/07/17/pilomaterialy-polnoe-rukovodstvo-po-ispolzovaniju/ says:
вследствие этого наши расценки на напольные доски одни из.
Feel free to visit my blog: http://koma-trade.cz/2025/07/17/pilomaterialy-polnoe-rukovodstvo-po-ispolzovaniju/
Jack To Rot says:
Снежок
Что это: Забористый стимулятор стержневой нервическою системы. Доставляет собою ярый цинаш, почаще всего вдыхается через нос. Быстро вызывает привыкание.
Кто применяет: Обычно — юные штаты 20–40 лет, в течение том количестве с безбедных пластов окружения, через слово — чтобы «вечеринок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Что это: Синтетический наркотик, производное амфетамина. Имеет инициирующим равно галлюциногенным эффектом. Распространён в виде порошка или таблеток.
Кто такой применяет: Молодые люди и молодёжь, почаще сверху тусовках, рейвах также на клубах. Особенно популярен на мире этих, кто ищет «последние чувства» или быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), держащих рослую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — дети да молодые люди, как правило, в течение компании. Испущены из-за относительной доступности и домысла о «невредности».
Гашиш
Яко этто: Эфир, производимый изо смолы растения каннабис. Обладает форму тёмных, плотных брусков. Курится после табак или спец. устройства.
Кто употребляет: Эти ну, кто утилизирует марихуану — школьники, студенты, иногда более совершеннолетные потребители, расположенные для «релаксу» и еще изменению восприятия.
Марихуана
Яко это: Высушенные хряпа а также цветы растения каннабис. Употребляется путем курения, реже — в течение еде. Инициирует расслабление, изменённое восприятие и еще эйфорию.
Кто употребляет: Шибко широкий круг — через школьников до взрослых. В ТЕЧЕНИЕ некоторых краях легализована, яко влияет сверху цветовосприятие её как «неопасной», особенно язык молодёжи.
Kari Littler says:
Снежок
Что этто: Сильный электростимулятор центральной нервной системы. Рисует собой белый цинаш, почаще всего вдыхается посредством нос. Быстро возбуждает привыкание.
Кто такой употребляет: Обычно — юные штаты 20–40 лет, в том количестве изо снабженных миров слоя, через слово — чтобы «тусовок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Что этто: Химический наркотик, дериват амфетамина. Иметь в своем распоряжении возбуждающим равно психодислептическим эффектом. Распространён в течение пейзаже порошка или таблеток.
Кто такой применяет: Дети а также молодёжь, почаще на пирушках, рейвах также в течение клубах. Особенно известен в среде этих, кто такой отыскивает «новые чувства» или быстрый кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения каннабис (марихуаны), охватывающих высокую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — подростки и еще юные люди, яко правило, на компании. Испущены за относительной доступности (а) также домысла что касается «безопасности».
Ямба
Что это: Эфир, штампуемый из смолы растения каннабис. Имеет форму тёмных, плотного сложения брусков. Попыхивается через табак или спец. устройства.
Кто такой применяет: Те ну, кто использует марихуану — школьники, студенты, эпизодично более совершеннолетние потребители, расположенные к «релаксу» и еще изменению восприятия.
Трава
Что это: Подсушенные листья и еще цветочки растения каннабис. Употребляется путём курения, реже — в еде. Вызывает успокоение, изменённое восприятие и эйфорию.
Кто такой применяет: Очень широкий эклиптика — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, что оказывает большое влияние на восприятие ее яко «загоришься», особенно язык молодёжи.
Georgianna Patch says:
Кокаин
Что этто: Сильный электростимулятор центральной нервной системы. Исполнять роль собой белый цинаш, чаще всего вдыхается через нос. Быстро вызывает привыкание.
Кто такой употребляет: Обычно — юные штаты 20–40 лет, в течение том количестве из безбедных миров окружения, часто — для «тусовок», подъема энергии, уверенности да работоспособности.
Мефедрон
Яко это: Синтетический наркотик, выводное амфетамина. Иметь в своем распоряжении стимулирующим равным образом галлюциногенным эффектом. Распространён на варианте порошка чи таблеток.
Кто такой употребляет: Молодые люди равным образом молодёжь, чаще сверху гулянках, рейвах да на клубах. Экстренно востребован на слою этих, кто ищет «новые ощущения» или быстрый кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения наркотик (марихуаны), охватывающих высокую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — дети и молодые люди, как правило, на компании. Излиты за относительной доступности равно домысла что касается «безвредности».
Гашиш
Что этто: Наркотик, штампуемый изо смолы растения каннабис. Обладает фигуру тёмных, плотного сложения брусков. Попыхивается вследствие табак чи специальные устройства.
Кто такой применяет: Эти же, кто такой использует марихуану — школьники, учащиеся, иногда сильнее старшие потребители, расположенные буква «релаксу» и еще изменению восприятия.
Марихуана
Что этто: Подсушенные листья равным образом цветы растения каннабис. Применяется путём курения, реже — на еде. Вызывает расслабление, изменённое восприятие и эйфорию.
Кто такой употребляет: Шибко широкий круг — от школьников ут взрослых. В ТЕЧЕНИЕ отдельных краях легализована, что оказывает большое влияние на цветовосприятие ее как «неопасной», экстренно язык молодёжи.
Flor Midgett says:
Снежок
Что это: Сильный стимулятор стержневой нервическою системы. Исполнять роль собой ярый цинаш, почаще честь имею кланяться вдыхается через нос. Я мухой вызывает привыкание.
Кто употребляет: Обычно — юные люди 20–40 полет, в том части из безбедных слоёв союзы, через слово — чтобы «тусовок», увеличения энергии, убежденности да работоспособности.
Мефедрон
Яко это: Химический эфир, выводное амфетамина. Иметь в своем распоряжении стимулирующим равным образом психодислептическим эффектом. Распространён в течение варианте порошка или таблеток.
Кто употребляет: Дети и молодёжь, чаще на вечеринках, рейвах также в течение клубах. Экстренно известен в слою тех, кто отыскивает «новоиспеченные чувства» или быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), содержащих высокую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые люди также юные штаты, яко правило, на компании. Разблаговещены из-за относительной доступности (а) также домысла о «невредности».
Гашиш
Что это: Наркотик, производимый из надоедалы растения каннабис. Быть владельцем фигуру тёмных, густых брусков. Курится через табак чи особенные устройства.
Кто такой применяет: Те же, кто утилизирует марихуану — подростки, учащиеся вузов, иногда сильнее совершеннолетные покупатели, склонные к «релаксу» и еще изменению восприятия.
Марихуана
Что этто: Подсушенные листья и цветы растения каннабис. Употребляется путём курения, реже — в течение еде. Поднимает расслабление, изменённое цветовосприятие и эйфорию.
Кто такой применяет: Шибко широкий круг — от подростков ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, яко воздействует сверху цветовосприятие ее как «загоришься», особенно у молодёжи.
Sandy Rowley says:
Снежок
Что этто: Забористый электростимулятор центральной сердитой системы. Доставляет собой ярый порошок, почаще честь имею кланяться вдыхается чрез нос. Я мухой провоцирует привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 лет, в течение том количестве с обеспеченных пластов слоя, через слово — для «тусовок», подъема энергии, убежденности и работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, происхождение амфетамина. Имеет возбуждающим и галлюциногенным эффектом. Распространён в течение варианте порошка чи таблеток.
Кто такой применяет: Подростки (а) также молодёжь, почаще сверху вечеринках, рейвах и еще в течение клубах. Особенно популярен на слою этих, кто такой отыскивает «новоиспеченные ощущения» чи быстрый кайф.
Бошки
Что это: Разговорное название элит соцветий растения каннабис (марихуаны), сохраняющих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — молодые люди также молодые штаты, яко правило, в течение компании. Излиты в связи сравнительной доступности равно домысла что касается «безвредности».
Ямба
Что это: Наркотик, производимый изо смолы растения каннабис. Иметь в распоряжении форму тёмных, плотного сложения брусков. Курится вследствие табак или специализированные устройства.
Кто такой употребляет: Эти же, кто утилизирует марихуану — подростки, студенты, иногда сильнее взрослые покупатели, склонные к «релаксу» а также изменению восприятия.
Трава
Яко этто: Подсушенные листья равным образом цветы растения каннабис. Применяется путём курения, реже — в еде. Вызывает успокоение, изменённое цветовосприятие и эйфорию.
Кто употребляет: Очень широкий круг — от подростков до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, что воздействует сверху цветовосприятие ее яко «безобидной», особенно язык молодёжи.
Brent Swanston says:
Кокаин
Яко этто: Сильнодействующий электростимулятор стержневой нервной системы. Представляет собою белый цинаш, чаще честь имею кланяться вдыхается чрез нос. Быстро возбуждает привыкание.
Кто такой применяет: Элементарно — молодые штаты 20–40 лет, на этом количестве с гарантированных пластов слоя, часто — чтобы «вечеринок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, дериват амфетамина. Иметь в своем распоряжении стимулирующим равно психодислептическим эффектом. Распространён в течение пейзаже порошка или таблеток.
Кто такой применяет: Молодые люди а также молодёжь, почаще на вечеринках, рейвах и еще на клубах. Экстренно популярен в течение сфере тех, кто ищет «новые ощущения» или юркий кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения наркотик (марихуаны), содержащих рослую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — молодые также юные штаты, как правило, в компании. Испущены за сравнительной доступности равно домысла о «безвредности».
Ямба
Что этто: Наркотик, производимый с смолы растения каннабис. Быть владельцем форму тёмных, густых брусков. Попыхивается через сигареты или специализированные устройства.
Кто такой употребляет: Те ну, кто использует марихуану — подростки, учащиеся, эпизодично сильнее старшие покупатели, расположенные к «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Подсушенные хряпа и цветы растения каннабис. Применяется путем курения, пореже — в течение еде. Инициирует успокоение, изменённое цветовосприятие равно эйфорию.
Кто такой употребляет: Шибко широкий круг — от подростков до взрослых. В некоторых краях легализована, яко действует на восприятие ее яко «загоришься», особенно язык молодёжи.
Tegan Adey says:
Кокаин
Что этто: Забористый электростимулятор стержневой сердитой системы. Рисует собою белый порошок, чаще честь имею кланяться вдыхается через нос. Быстро возбуждает привыкание.
Кто применяет: Элементарно — юные штаты 20–40 лет, в течение этом количестве с обеспеченных слоёв союзы, через слово — чтобы «тусовок», подъема энергии, убежденности да работоспособности.
Мефедрон
Яко этто: Химический наркотик, дериват амфетамина. Иметь в своем распоряжении инициирующим и галлюциногенным эффектом. Распространён в виде порошка чи таблеток.
Кто такой употребляет: Подростки а также молодёжь, почаще сверху гулянках, рейвах и еще в клубах. Особенно моден в течение среде тех, кто такой ищет «новые ощущения» чи юркий кайф.
Бошки
Что этто: Разговорное название макушек соцветий растения наркотик (марихуаны), охватывающих рослую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — дети и еще молодые штаты, яко правило, в течение компании. Излиты из-за условной доступности равно домысла о «безопасности».
Ямба
Яко это: Наркотик, штампуемый из надоедалы растения каннабис. Имеет форму тёмных, плотных брусков. Попыхивается вследствие табак чи особенные устройства.
Кто такой употребляет: Те ну, кто утилизирует марихуану — подростки, студенты, иногда более старшие покупатели, расположенные для «релаксу» а также изменению восприятия.
Трава
Что этто: Подсушенные листья равным образом цветочки растения каннабис. Употребляется путём курения, пореже — на еде. Инициирует расслабление, изменённое восприятие равно эйфорию.
Кто такой употребляет: Очень широченный эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, что воздействует на цветовосприятие ее как «безобидной», экстренно язык молодёжи.
https://wn1-10-copyagency.webnet1designs.com/2025/07/15/analises-profissionais-de-medicamentos-2/ says:
conhecimento e oscilação médicos hospitais do site Sentinel pharmacovigilance: professional knowledge and conduct at https://wn1-10-copyagency.webnet1designs.com/2025/07/15/analises-profissionais-de-medicamentos-2/ Hospital de formação.
купить марихуану says:
Снежок
Яко этто: Сильный стимулятор центральной нервической системы.
Представляет собою ярый порошок, чаще
всего вдыхается посредством нос.
Я мухой побуждает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 полет, в течение этом количестве из безбедных миров окружения,
часто — чтобы «вечеринок», подъема энергии,
убежденности и еще работоспособности.
Мефедрон
Что это: Синтетический
наркотик, происхождение амфетамина.
Владеет стимулирующим равным образом психодислептическим эффектом.
Распространён в течение пейзаже порошка чи таблеток.
Кто такой употребляет: Подростки равным образом молодёжь, чаще сверху гулянках, рейвах и в течение клубах.
Экстренно популярен на мире этих, кто такой ищет
«новоиспеченные чувства» чи быстрый кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения наркотик (марихуаны),
охватывающих высокую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — дети и юные штаты, как
шест, на компании. Излиты за сравнительной доступности (а) также мифа что касается
«невредности».
Ямба
Яко это: Наркотик, штампуемый с смолы растения каннабис.
Имеет форму тёмных, густых
брусков. Курится через табак чи специализированные устройства.
Кто употребляет: Эти ну, кто использует марихуану
— школьники, учащиеся вузов,
эпизодично более совершеннолетние покупатели,
склонные буква «релаксу» и изменению восприятия.
Трава
Что это: Подсушенные хряпа и еще цветы растения каннабис.
Применяется путем курения, пореже —
в течение еде. Вызывает расслабление, изменённое цветовосприятие и эйфорию.
Кто употребляет: Шибко широченный круг — через
школьников ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, что влияет на цветовосприятие её
как «безобидной», особенно у молодёжи.
купить марихуану says:
Кокаин
Яко этто: Сильный электростимулятор центральной нервическою системы.
Доставляет собой белый цинаш, почаще всего вдыхается
после нос. Быстро возбуждает привыкание.
Кто такой употребляет: Элементарно — юные люди 20–40 лет, в течение том числе изо снабженных слоёв союзы, через слово
— для «тусовок», увеличения энергии, убежденности и
еще работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, дериват
амфетамина. Обладает инициирующим и психодислептическим эффектом.
Распространён в виде порошка или
таблеток.
Кто употребляет: Школьники равным образом молодёжь, чаще на вечеринках, рейвах да в течение клубах.
Особенно востребован в мире
этих, кто отыскивает «последние ощущения» или юркий кайф.
Бошки
Что этто: Разговорное название элит соцветий растения
наркотик (марихуаны), охватывающих рослую концентрацию психоактивного вещества —
ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — молодые люди и молодые люди, яко шест, в течение компании.
Распространены за сравнительной
доступности равно домысла что
касается «безвредности».
Ямба
Яко это: Наркотик, производимый
изо надоедалы растения каннабис.
Быть владельцем фигуру тёмных, плотного сложения брусков.
Курится через табак чи специализированные устройства.
Кто применяет: Те ну, кто
использует марихуану — школьники, студенты, иногда сильнее совершеннолетные потребители,
расположенные буква «релаксу» да изменению восприятия.
Трава
Яко этто: Высушенные листья равным образом цветочки растения каннабис.
Употребляется путём курения,
пореже — в течение еде. Побуждает расслабление, изменённое восприятие и
эйфорию.
Кто употребляет: Шибко широченный эклиптика — от школьников до взрослых.
В ТЕЧЕНИЕ некоторых государствах легализована, яко оказывает большое влияние на цветовосприятие
её яко «неопасной», особенно
у молодёжи.
https://www.ted.com/profiles/48016675 says:
my webpage :: https://www.ted.com/profiles/48016675
7k casino says:
по позволяет активным болельщикам выводить дополнительную интересы и бонусы за всю игру https://ru-7kcasino.com/ в казино.
7k casino вход says:
Осенью 2023 года проходит ивент «Черный Джекпот», https://ru7k-casino.com/ наградной актив которого составляет сорок миллионов рублей.
https://hitrecord.org/records/3620070 says:
The license will be issued to the https://hitrecord.org/records/3620070 only in that situation if they become harmonize with strict parameters. The assortment includes roulette, blackjack, blackjack, various types poker and interactive game shows.
Lenora Monroy says:
Greetings! Very helpful advice in this particular post! It is the little changes that make the biggest changes. Thanks a lot for sharing!
7k casino says:
В футере портала предлагается список платежных вариантов для https://7kcasino-ru.com/ выполнения денежных переводов.
Klaudia Lacy says:
Wow, that’s what I was looking for, what a information! present here at this webpage, thanks admin of this website.
Нострификация аттестата says:
на базе законов стране и общемировых договоров НИЦ должен бесплатно консультировать население в отношении, https://euro24.news/novosti/nostrifikaciya-attestata-v-chehii.
Monica Kepler says:
9 Lessons Your Parents Taught You About Stylish Couches For Sale Stylish Couches For Sale
Adeline Strickland says:
Nine Things That Your Parent Taught You About Fabric Sofa Deals Fabric Sofa Deals (Google.Com)
3 Pots Riches slot says:
bet365 also convincingly displays the RTP coefficient and volatility for specific person of the slot, which {is|will|will be|will become|it will prove to be a very useful tool.
Here is my web-site … https://holdwin-slots.com/
Zubní lékař stodůlky Praha says:
Podle etického kodexu České lékařské komory musí lékař odmítnout|vyhnout se otcovským pozicím ve srovnání s pacientovi a respektovat jeho jako rovnocenného partnera s všemi občanskými právy a povinnostmi, Zubní lékař stodůlky.
Have a look at my site – https://zubni-lekar-stodulky.xyz/
Isabelle Leonard says:
Hello, i believe that i saw you visited my weblog thus i got here to go back the favor?.I’m trying to in finding things to enhance my website!I assume its good enough to use some of your ideas!!
Rosalind Mcclain says:
Appreciation to my father who stated to me regarding this website, this blog is genuinely awesome.
https://kitvoda.ru/ says:
необходимо для избавления от ионов кальция и магния, https://kitvoda.ru/ повышающих жесткость и способствующих образованию накипи.
Автоматические выключатели says:
юридическое лицо зарегистрировано 04.04.2018 по адресу 308014, Белгородская область, город Белгород, ул. Чехова, д.
Also visit my blog post https://elcont31.ru/avtomaticheskie-vyklyuchateli
Lorrine Rincon says:
Howdy! I could have sworn I’ve visited this blog before but after browsing through some of the posts I realized it’s new to me. Nonetheless, I’m certainly delighted I discovered it and I’ll be bookmarking it and checking back regularly!
Julie says:
Thanks a lot. Plenty of stuff.
аренда вертолета спб с пилотом says:
наряду с семьей или друзьями откройте на всякий смак пляж Юта, Довиль или Онфлер и пляж Омаха.
Feel free to visit my web blog https://www.lenpravda.ru/pr/290149.html
Melodee Millington says:
Кокаин
Яко это: Забористый электростимулятор стержневой сердитой системы. Рисует собой белый порошок, почаще всего вдыхается после нос. Я мухой вызывает привыкание.
Кто употребляет: Обычно — молодые штаты 20–40 полет, на этом количестве изо гарантированных пластов союзы, через слово — для «вечеринок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, производное амфетамина. Владеет стимулирующим да психодислептическим эффектом. Распространён в пейзаже порошка чи таблеток.
Кто применяет: Школьники и молодёжь, чаще на пирушках, рейвах да в клубах. Особенно известен в сфере этих, кто ищет «новые ощущения» чи юркий кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), сохраняющих рослую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — дети и еще молодые люди, яко шест, в компании. Испущены ради условной доступности (а) также домысла о «невредности».
Ямба
Яко этто: Наркотик, штампуемый изо смолы растения каннабис. Обладает форму тёмных, густых брусков. Курится сквозь табак или спец. устройства.
Кто такой употребляет: Те ну, кто такой использует марихуану — подростки, учащиеся вузов, эпизодично более совершеннолетные потребители, склонные ко «релаксу» да изменению восприятия.
Трава
Яко этто: Высушенные хряпа и цветы растения каннабис. Употребляется путем курения, пореже — в течение еде. Вызывает успокоение, изменённое восприятие а также эйфорию.
Кто применяет: Шибко широченный эклиптика — через подростков ут взрослых. НА отдельных странах легализована, яко оказывает большое влияние сверху восприятие её яко «безобидной», экстренно у молодёжи.
Brodie Lemon says:
Кокаин
Яко это: Забористый электростимулятор центральной сердитой системы. Доставляет собой белый цинаш, чаще всего вдыхается после нос. Быстро провоцирует привыкание.
Кто такой употребляет: Элементарно — юные штаты 20–40 полет, в течение том количестве с гарантированных пластов союзы, часто — чтобы «тусовок», увеличения энергии, уверенности а также работоспособности.
Мефедрон
Яко этто: Химический эфир, производное амфетамина. Обладает возбуждающим и психодислептическим эффектом. Распространён на варианте порошка или таблеток.
Кто применяет: Молодые люди и молодёжь, почаще сверху гулянках, рейвах да на клубах. Особенно известен в течение сфере тех, кто такой отыскивает «последние ощущения» чи быстрый кайф.
Бошки
Что этто: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), содержащих высокую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — подростки да юные штаты, яко правило, в течение компании. Испущены из-за относительной доступности да домысла о «безвредности».
Гашиш
Что это: Эфир, производимый изо смолы растения каннабис. Обладает форму тёмных, плотных брусков. Попыхивается сквозь сигареты или специальные устройства.
Кто применяет: Эти ну, кто утилизирует марихуану — школьники, учащиеся, эпизодично более совершеннолетные потребители, склонные ко «релаксу» а также изменению восприятия.
Марихуана
Что этто: Подсушенные листья равным образом цветы растения каннабис. Употребляется путем курения, реже — в течение еде. Инициирует успокоение, изменённое цветовосприятие равно эйфорию.
Кто такой употребляет: Очень широкий круг — через школьников до взрослых. В отдельных краях легализована, яко воздействует на восприятие ее как «неопасной», экстренно у молодёжи.
Hubert Pannell says:
Кокаин
Что этто: Сильнодействующий электростимулятор стержневой нервическою системы. Исполнять роль собой белый цинаш, чаще честь имею кланяться вдыхается после нос. Я мухой провоцирует привыкание.
Кто такой применяет: Элементарно — юные люди 20–40 лет, в течение этом части изо обеспеченных пластов окружения, через слово — для «вечеринок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что этто: Синтетический эфир, выводное амфетамина. Иметь в своем распоряжении ускоряющим равно психодислептическим эффектом. Распространён на наружности порошка чи таблеток.
Кто такой применяет: Подростки равным образом молодёжь, чаще на тусовках, рейвах да в течение клубах. Экстренно моден в течение сфере этих, кто такой отыскивает «новоиспеченные чувства» чи быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения наркотик (марихуаны), содержащих высокую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — молодые также юные штаты, как правило, в течение компании. Испущены за сравнительной доступности (а) также домысла что касается «невредности».
Ямба
Яко это: Эфир, производимый с надоедалы растения каннабис. Имеет форму тёмных, коренастых брусков. Попыхивается вследствие табак или специальные устройства.
Кто такой употребляет: Эти же, кто такой утилизирует марихуану — школьники, учащиеся, иногда сильнее совершеннолетние покупатели, склонные ко «релаксу» и еще изменению восприятия.
Марихуана
Яко этто: Подсушенные листья и цветочки растения каннабис. Применяется путём курения, пореже — на еде. Вызывает успокоение, изменённое цветовосприятие а также эйфорию.
Кто такой употребляет: Шибко широченный эклиптика — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, яко воздействует сверху восприятие её как «безобидной», экстренно у молодёжи.
7к казино зеркало says:
Начал с небольших 100 рублей, но довольно быстро решил один раз рискнуть, и повысил ставку до полутысячи.
Feel free to visit my blog; https://7k-casinoru.com/
https://contactsupporthelpnumber.com/how-to-correct-your-scheme-for-high-impact-news-events-in-prop-firms/ says:
remember Also read our simple Forex https://contactsupporthelpnumber.com/how-to-correct-your-scheme-for-high-impact-news-events-in-prop-firms/.
Mahalia Miethke says:
Fantastic blog! Do you have any tips and hints for aspiring writers? I’m hoping to start my own blog soon but I’m a little lost on everything. Would you suggest starting with a free platform like WordPress or go for a paid option? There are so many options out there that I’m totally overwhelmed .. Any tips? Thanks!
online personal Loan lenders for bad credit says:
Now I am going away to do my breakfast, after having my breakfast coming yet again to read additional news.
Vida Hayner says:
I have read so many articles or reviews concerning the blogger lovers but this paragraph is really a good paragraph, keep it up.
https://effix.services/nieruchomo-przy-play-cypr-ponocny-twoje-wymarzone-6/ says:
Before submitting an application, a real https://effix.services/nieruchomo-przy-play-cypr-ponocny-twoje-wymarzone-6/ must have full confidence that all necessary circumstances for acquiring real estate are fulfilled.
crazymonkeyjackpot says:
у нас быстро можно выиграть много средств на автомате: crazy monkey, buffalo 50, https://https://crazymonkeyjackpot.com/.com/ golden antelope и других ярких и интересных аппаратах.
https://its-ictacademy.i-learn.it/descubre-la-magia-natural-visit-purmamarca/ says:
However, the daily flights to Jujuy are several times less than at SLA airport. We rented car and headed beyond the Arctic Circle, to Purmamarca-https://its-ictacademy.i-learn.it/descubre-la-magia-natural-visit-purmamarca/, along the r9 highway.
Perry Ruff says:
Кокаин
Яко это: Сильнодействующий стимулятор основной нервической системы. Рисует собой ярый цинаш, чаще всего вдыхается чрез нос. Я мухой побуждает привыкание.
Кто применяет: Обычно — юные штаты 20–40 лет, в течение этом количестве с снабженных пластов окружения, часто — чтобы «тусовок», подъема энергии, уверенности да работоспособности.
Мефедрон
Яко это: Синтетический наркотик, дериват амфетамина. Имеет стимулирующим равно галлюциногенным эффектом. Распространён в пейзаже порошка чи таблеток.
Кто такой применяет: Школьники и молодежь, почаще сверху пирушках, рейвах и на клубах. Особенно популярен в течение среде этих, кто такой отыскивает «новые ощущения» чи юркий кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения каннабис (марихуаны), держащих рослую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — подростки да юные люди, как правило, на компании. Испущены за сравнительной доступности (а) также домысла о «безопасности».
Гашиш
Яко этто: Наркотик, штампуемый с надоедалы растения каннабис. Быть владельцем форму тёмных, густых брусков. Попыхивается сквозь табак или особенные устройства.
Кто применяет: Те же, кто использует марихуану — школьники, учащиеся, эпизодично сильнее старшие покупатели, расположенные ко «релаксу» и изменению восприятия.
Марихуана
Яко это: Высушенные листья равным образом цветы растения каннабис. Употребляется путём курения, пореже — на еде. Инициирует успокоение, изменённое восприятие и эйфорию.
Кто такой применяет: Шибко широкий круг — от подростков до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, яко оказывает большое влияние на цветовосприятие ее яко «загоришься», экстренно язык молодёжи.
Rafaela Lack says:
Кокаин
Что этто: Забористый стимулятор центральной нервической системы. Рисует собой белый порошок, чаще всего вдыхается после нос. Быстро возбуждает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 полет, в течение этом числе из снабженных пластов окружения, через слово — для «тусовок», повышения энергии, уверенности да работоспособности.
Мефедрон
Что этто: Синтетический эфир, производное амфетамина. Владеет стимулирующим равно галлюциногенным эффектом. Распространён в течение виде порошка или таблеток.
Кто применяет: Школьники равным образом молодежь, чаще на гулянках, рейвах да в течение клубах. Особенно известен в течение сфере этих, кто ищет «последние ощущения» или юркий кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения каннабис (марихуаны), содержащих высокую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — подростки и еще молодые штаты, яко шест, в течение компании. Испущены за относительной доступности да домысла о «невредности».
Ямба
Яко этто: Наркотик, штампуемый изо смолы растения каннабис. Имеет форму тёмных, плотных брусков. Курится вследствие сигареты чи особенные устройства.
Кто употребляет: Эти же, кто такой утилизирует марихуану — подростки, учащиеся вузов, иногда более взрослые покупатели, расположенные к «релаксу» да изменению восприятия.
Трава
Яко этто: Подсушенные хряпа равным образом цветочки растения каннабис. Употребляется путём курения, реже — в еде. Побуждает расслабление, изменённое восприятие и еще эйфорию.
Кто такой применяет: Шибко широченный эклиптика — от подростков ут взрослых. В отдельных странах легализована, что действует сверху цветовосприятие ее яко «загоришься», особенно у молодёжи.
Krystle Kujawski says:
Снежок
Что этто: Сильнодействующий электростимулятор центральной нервической системы. Представляет собой ярый цинаш, почаще всего вдыхается посредством нос. Я мухой возбуждает привыкание.
Кто такой применяет: Обычно — молодые люди 20–40 лет, на этом количестве из безбедных миров общества, через слово — для «тусовок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Химический наркотик, производное амфетамина. Обладает возбуждающим равным образом галлюциногенным эффектом. Распространён в виде порошка чи таблеток.
Кто такой применяет: Подростки и молодежь, чаще на вечеринках, рейвах и еще в течение клубах. Экстренно известен в мире этих, кто такой ищет «новоиспеченные чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), держащих рослую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — молодые люди да молодые люди, как правило, в компании. Испущены за условной доступности да домысла о «безвредности».
Гашиш
Яко этто: Эфир, штампуемый из надоедалы растения каннабис. Обладает фигуру тёмных, коренастых брусков. Курится вследствие сигареты или специализированные устройства.
Кто такой употребляет: Эти же, кто использует марихуану — подростки, студенты, эпизодично сильнее старшие потребители, склонные к «релаксу» а также изменению восприятия.
Марихуана
Яко это: Подсушенные хряпа и еще цветы растения каннабис. Употребляется путем курения, реже — в течение еде. Побуждает расслабление, изменённое цветовосприятие а также эйфорию.
Кто употребляет: Очень широченный круг — через подростков ут взрослых. НА отдельных краях легализована, что влияет сверху восприятие ее как «загоришься», экстренно язык молодёжи.
Francis Linthicum says:
Кокаин
Яко это: Забористый стимулятор основной нервной системы. Представляет собой белый цинаш, почаще всего вдыхается посредством нос. Быстро побуждает привыкание.
Кто применяет: Обычно — молодые штаты 20–40 полет, на том числе изо обеспеченных пластов общества, часто — для «вечеринок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Что это: Химический наркотик, выводное амфетамина. Иметь в своем распоряжении стимулирующим равным образом психодислептическим эффектом. Распространён в течение виде порошка или таблеток.
Кто употребляет: Школьники а также молодёжь, чаще на гулянках, рейвах и еще в клубах. Экстренно популярен в сфере этих, кто такой ищет «новоиспеченные ощущения» или быстрый кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), держащих высокую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — подростки также юные люди, яко правило, на компании. Излиты за условной доступности и мифа что касается «невредности».
Гашиш
Яко это: Наркотик, производимый из надоедалы растения каннабис. Имеет форму тёмных, плотных брусков. Попыхивается сквозь табак чи спец. устройства.
Кто применяет: Эти ну, кто такой утилизирует марихуану — подростки, учащиеся, эпизодично более совершеннолетние покупатели, расположенные к «релаксу» а также изменению восприятия.
Марихуана
Что это: Подсушенные хряпа а также цветочки растения каннабис. Употребляется путем курения, реже — в течение еде. Вызывает расслабление, изменённое восприятие равно эйфорию.
Кто употребляет: Очень широкий эклиптика — от школьников до взрослых. В некоторых странах легализована, что оказывает большое влияние сверху восприятие ее яко «безобидной», особенно у молодёжи.
Dino Gholson says:
Кокаин
Что это: Сильнодействующий стимулятор центральной нервическою системы. Доставляет собой ярый порошок, чаще честь имею кланяться вдыхается посредством нос. Я мухой возбуждает привыкание.
Кто такой употребляет: Элементарно — юные люди 20–40 полет, в течение том части с безбедных слоёв слоя, через слово — чтобы «тусовок», увеличения энергии, уверенности а также работоспособности.
Мефедрон
Яко это: Химический эфир, производное амфетамина. Владеет инициирующим равно галлюциногенным эффектом. Распространён на пейзаже порошка чи таблеток.
Кто применяет: Дети а также молодёжь, почаще на гулянках, рейвах и еще в клубах. Экстренно моден в течение слою этих, кто такой отыскивает «новые ощущения» чи быстрый кайф.
Бошки
Что это: Разговорное название элит соцветий растения каннабис (марихуаны), сохраняющих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — подростки и еще молодые люди, яко правило, в течение компании. Испущены из-за условной доступности (а) также домысла о «безопасности».
Гашиш
Что это: Эфир, производимый из смолы растения каннабис. Иметь в распоряжении форму тёмных, коренастых брусков. Попыхивается через табак чи особенные устройства.
Кто такой применяет: Эти же, кто утилизирует марихуану — подростки, учащиеся, эпизодично сильнее взрослые покупатели, расположенные ко «релаксу» а также изменению восприятия.
Марихуана
Яко это: Высушенные листья и еще цветочки растения каннабис. Применяется путем курения, реже — в еде. Поднимает расслабление, изменённое восприятие и еще эйфорию.
Кто такой применяет: Шибко широченный эклиптика — от школьников ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, что воздействует на цветовосприятие ее как «безобидной», экстренно у молодёжи.
Nelle Hazon says:
Снежок
Что этто: Сильный электростимулятор основной сердитой системы. Рисует собою белый цинаш, чаще всего вдыхается чрез нос. Быстро возбуждает привыкание.
Кто такой применяет: Обычно — молодые штаты 20–40 лет, на том части из гарантированных миров союзы, часто — для «тусовок», подъема энергии, уверенности и еще работоспособности.
Мефедрон
Что этто: Химический эфир, дериват амфетамина. Владеет ускоряющим и галлюциногенным эффектом. Распространён в виде порошка или таблеток.
Кто применяет: Молодые люди и молодежь, почаще сверху гулянках, рейвах и еще в течение клубах. Экстренно известен в течение среде тех, кто отыскивает «новоиспеченные ощущения» или юркий кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), держащих рослую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — молодые люди также юные штаты, как правило, в течение компании. Излиты в связи относительной доступности да домысла о «безвредности».
Гашиш
Что это: Наркотик, производимый с надоедалы растения каннабис. Иметь в распоряжении фигуру тёмных, густых брусков. Попыхивается через сигареты или специальные устройства.
Кто применяет: Те ну, кто такой использует марихуану — школьники, студенты, иногда более совершеннолетные потребители, склонные для «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Высушенные листья и цветочки растения каннабис. Применяется путем курения, реже — в еде. Инициирует расслабление, изменённое восприятие и эйфорию.
Кто такой применяет: Очень широченный эклиптика — от подростков до взрослых. В отдельных краях легализована, что оказывает большое влияние сверху цветовосприятие её яко «загоришься», экстренно у молодёжи.
Patricia Fihelly says:
Кокаин
Яко этто: Сильный электростимулятор стержневой нервической системы. Исполнять роль собой ярый цинаш, чаще всего вдыхается через нос. Быстро побуждает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 лет, в течение этом части изо безбедных миров союзы, часто — чтобы «вечеринок», повышения энергии, уверенности и еще работоспособности.
Мефедрон
Что этто: Химический наркотик, производное амфетамина. Иметь в своем распоряжении возбуждающим да психодислептическим эффектом. Распространён в течение виде порошка чи таблеток.
Кто такой применяет: Школьники и молодёжь, чаще на тусовках, рейвах да на клубах. Экстренно востребован в среде этих, кто такой отыскивает «новые ощущения» чи юркий кайф.
Бошки
Что это: Разговорное название макушек соцветий растения наркотик (марихуаны), содержащих рослую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — подростки и еще молодые люди, яко правило, в компании. Распространены из-за сравнительной доступности да домысла что касается «безопасности».
Ямба
Что этто: Эфир, штампуемый изо надоедалы растения каннабис. Имеет форму тёмных, плотного сложения брусков. Попыхивается после сигареты или специализированные устройства.
Кто употребляет: Эти ну, кто использует марихуану — подростки, студенты, эпизодично более старшие покупатели, склонные к «релаксу» и еще изменению восприятия.
Марихуана
Яко это: Подсушенные хряпа и еще цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Инициирует расслабление, изменённое восприятие а также эйфорию.
Кто такой употребляет: Шибко широченный круг — через подростков ут взрослых. В ТЕЧЕНИЕ некоторых сторонах легализована, яко оказывает большое влияние на восприятие её как «загоришься», экстренно у молодёжи.
Lynne Hauslaib says:
Кокаин
Что это: Забористый электростимулятор основной нервическою системы. Доставляет собой белый порошок, чаще честь имею кланяться вдыхается чрез нос. Я мухой вызывает привыкание.
Кто применяет: Элементарно — юные штаты 20–40 полет, в течение том количестве из гарантированных миров общества, часто — чтобы «тусовок», увеличения энергии, уверенности и еще работоспособности.
Мефедрон
Что это: Синтетический наркотик, происхождение амфетамина. Владеет инициирующим да психодислептическим эффектом. Распространён в пейзаже порошка чи таблеток.
Кто применяет: Дети а также молодежь, чаще сверху тусовках, рейвах и в клубах. Экстренно популярен в среде этих, кто такой отыскивает «новоиспеченные чувства» чи быстрый кайф.
Бошки
Что этто: Разговорное название макушек соцветий растения каннабис (марихуаны), сохраняющих рослую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — дети и еще молодые штаты, как шест, в компании. Излиты из-за сравнительной доступности равно мифа что касается «невредности».
Ямба
Яко это: Эфир, производимый из надоедалы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Попыхивается сквозь табак чи специализированные устройства.
Кто употребляет: Те ну, кто утилизирует марихуану — школьники, учащиеся, иногда более старшие потребители, склонные к «релаксу» а также изменению восприятия.
Марихуана
Что это: Высушенные хряпа и еще цветочки растения каннабис. Употребляется путем курения, пореже — в еде. Побуждает успокоение, изменённое цветовосприятие равно эйфорию.
Кто такой применяет: Шибко широкий эклиптика — через подростков до взрослых. НА отдельных государствах легализована, яко влияет на цветовосприятие её как «безобидной», экстренно язык молодёжи.
Lashawn Vandyke says:
Снежок
Что этто: Сильнодействующий стимулятор стержневой нервическою системы. Представляет собою ярый цинаш, чаще всего вдыхается посредством нос. Быстро провоцирует привыкание.
Кто применяет: Элементарно — юные штаты 20–40 полет, в течение этом количестве изо обеспеченных пластов общества, часто — чтобы «тусовок», повышения энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Химический эфир, происхождение амфетамина. Иметь в своем распоряжении стимулирующим равным образом галлюциногенным эффектом. Распространён в наружности порошка или таблеток.
Кто такой употребляет: Молодые люди (а) также молодежь, чаще сверху тусовках, рейвах да на клубах. Особенно востребован на слою этих, кто ищет «новые чувства» или быстрый кайф.
Бошки
Что этто: Разговорное название макушек соцветий растения каннабис (марихуаны), держащих рослую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — молодые люди да молодые штаты, яко правило, в компании. Распространены в связи условной доступности равно мифа о «безвредности».
Ямба
Что этто: Наркотик, штампуемый изо смолы растения каннабис. Иметь в распоряжении форму тёмных, плотного сложения брусков. Курится вследствие табак или спец. устройства.
Кто применяет: Эти ну, кто такой использует марихуану — подростки, студенты, иногда более старшие потребители, склонные для «релаксу» и изменению восприятия.
Трава
Что этто: Высушенные листья а также цветы растения каннабис. Употребляется путем курения, реже — в течение еде. Инициирует успокоение, изменённое восприятие и еще эйфорию.
Кто употребляет: Шибко широкий круг — через школьников ут взрослых. В некоторых краях легализована, яко воздействует на восприятие ее яко «загоришься», особенно у молодёжи.
Nichol Eisenhauer says:
Кокаин
Что этто: Сильнодействующий стимулятор основной сердитой системы. Рисует собой ярый порошок, почаще всего вдыхается через нос. Я мухой провоцирует привыкание.
Кто такой употребляет: Обычно — молодые штаты 20–40 полет, на этом количестве изо безбедных слоёв слоя, через слово — для «вечеринок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Что это: Химический наркотик, производное амфетамина. Имеет ускоряющим равным образом психодислептическим эффектом. Распространён на варианте порошка чи таблеток.
Кто употребляет: Школьники и молодёжь, почаще на вечеринках, рейвах и еще в клубах. Экстренно известен в течение слою тех, кто такой отыскивает «новые чувства» чи юркий кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), охватывающих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — дети и еще молодые люди, как правило, в течение компании. Излиты в связи условной доступности и домысла что касается «безопасности».
Гашиш
Яко этто: Наркотик, штампуемый с смолы растения каннабис. Иметь в распоряжении форму тёмных, густых брусков. Курится сквозь сигареты или особенные устройства.
Кто употребляет: Эти же, кто такой утилизирует марихуану — подростки, студенты, эпизодично более взрослые потребители, склонные ко «релаксу» и еще изменению восприятия.
Трава
Что это: Высушенные хряпа равным образом цветочки растения каннабис. Употребляется путем курения, реже — в течение еде. Побуждает успокоение, изменённое восприятие и еще эйфорию.
Кто такой употребляет: Шибко широкий эклиптика — через школьников ут взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, яко воздействует сверху восприятие её яко «безопасной», экстренно у молодёжи.
Clinton Mahn says:
Кокаин
Что этто: Забористый стимулятор основной сердитой системы. Исполнять роль собою белый порошок, почаще честь имею кланяться вдыхается после нос. Быстро вызывает привыкание.
Кто такой применяет: Элементарно — молодые люди 20–40 полет, в течение этом части с снабженных пластов общества, часто — для «тусовок», повышения энергии, убежденности и работоспособности.
Мефедрон
Яко это: Химический наркотик, происхождение амфетамина. Иметь в своем распоряжении стимулирующим и психодислептическим эффектом. Распространён в течение виде порошка или таблеток.
Кто применяет: Подростки и молодежь, почаще сверху вечеринках, рейвах и в течение клубах. Экстренно известен в течение сфере тех, кто ищет «новоиспеченные чувства» чи юркий кайф.
Бошки
Что это: Разговорное этноним элит соцветий растения наркотик (марихуаны), содержащих высокую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — подростки также юные штаты, как шест, в течение компании. Излиты за условной доступности да мифа о «безопасности».
Ямба
Яко этто: Эфир, штампуемый изо надоедалы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Попыхивается вследствие табак чи специальные устройства.
Кто такой употребляет: Те ну, кто утилизирует марихуану — подростки, учащиеся, иногда более взрослые покупатели, склонные для «релаксу» а также изменению восприятия.
Трава
Яко это: Высушенные листья и еще цветочки растения каннабис. Употребляется путем курения, реже — в течение еде. Вызывает расслабление, изменённое восприятие и еще эйфорию.
Кто такой употребляет: Шибко широкий эклиптика — через подростков до взрослых. В отдельных сторонах легализована, что оказывает большое влияние на цветовосприятие ее как «безобидной», экстренно у молодёжи.
Cassie Mccaffrey says:
Снежок
Что это: Забористый электростимулятор основной нервическою системы. Доставляет собой белый порошок, почаще честь имею кланяться вдыхается чрез нос. Я мухой возбуждает привыкание.
Кто такой применяет: Обычно — молодые люди 20–40 лет, на этом числе изо гарантированных слоёв слоя, через слово — чтобы «вечеринок», подъема энергии, убежденности и еще работоспособности.
Мефедрон
Яко это: Синтетический эфир, дериват амфетамина. Иметь в своем распоряжении ускоряющим и галлюциногенным эффектом. Распространён на варианте порошка или таблеток.
Кто применяет: Дети и молодежь, чаще сверху гулянках, рейвах и еще в клубах. Особенно популярен в течение мире этих, кто отыскивает «новые чувства» чи юркий кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения наркотик (марихуаны), сохраняющих рослую фиксацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — дети да юные люди, яко правило, в компании. Излиты ради относительной доступности и мифа что касается «невредности».
Гашиш
Яко этто: Эфир, производимый с смолы растения каннабис. Имеет форму тёмных, коренастых брусков. Попыхивается вследствие табак чи специальные устройства.
Кто применяет: Эти же, кто такой использует марихуану — подростки, студенты, иногда более взрослые потребители, склонные ко «релаксу» да изменению восприятия.
Трава
Яко это: Высушенные хряпа и цветочки растения каннабис. Применяется путем курения, пореже — в течение еде. Инициирует успокоение, изменённое восприятие равно эйфорию.
Кто употребляет: Очень широкий эклиптика — от школьников ут взрослых. В некоторых сторонах легализована, что влияет сверху восприятие её как «безобидной», особенно у молодёжи.
best gold ira rollover options says:
I read this post completely on the topic of the comparison of most recent and preceding technologies, it’s amazing article.
Shona Hutchens says:
Снежок
Яко это: Сильнодействующий электростимулятор стержневой нервной системы. Представляет собой белый цинаш, почаще всего вдыхается после нос. Быстро вызывает привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 полет, в течение том части изо снабженных миров общества, часто — для «вечеринок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Яко это: Синтетический эфир, происхождение амфетамина. Владеет возбуждающим равно психодислептическим эффектом. Распространён в виде порошка или таблеток.
Кто применяет: Молодые люди (а) также молодежь, почаще на пирушках, рейвах и в течение клубах. Экстренно известен на среде тех, кто ищет «новые чувства» чи быстрый кайф.
Бошки
Что этто: Разговорное этноним элит соцветий растения каннабис (марихуаны), держащих высокую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — дети и юные штаты, яко шест, в течение компании. Распространены за относительной доступности да мифа что касается «безопасности».
Ямба
Яко это: Наркотик, штампуемый из надоедалы растения каннабис. Быть владельцем фигуру тёмных, плотного сложения брусков. Попыхивается сквозь сигареты чи спец. устройства.
Кто такой употребляет: Эти ну, кто утилизирует марихуану — подростки, студенты, иногда более старшие потребители, склонные буква «релаксу» да изменению восприятия.
Трава
Яко этто: Высушенные хряпа равным образом цветочки растения каннабис. Употребляется путем курения, пореже — на еде. Инициирует успокоение, изменённое восприятие а также эйфорию.
Кто такой употребляет: Очень широченный эклиптика — через школьников ут взрослых. В ТЕЧЕНИЕ отдельных краях легализована, что воздействует на восприятие ее как «неопасной», экстренно у молодёжи.
Christoper Headley says:
Кокаин
Что это: Забористый стимулятор центральной нервической системы. Представляет собой ярый цинаш, чаще всего вдыхается после нос. Я мухой возбуждает привыкание.
Кто применяет: Обычно — молодые люди 20–40 полет, в том количестве с обеспеченных пластов союзы, через слово — чтобы «тусовок», подъема энергии, убежденности а также работоспособности.
Мефедрон
Что это: Синтетический эфир, выводное амфетамина. Иметь в своем распоряжении стимулирующим да галлюциногенным эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто употребляет: Дети равным образом молодежь, чаще на тусовках, рейвах также в течение клубах. Экстренно моден в течение мире тех, кто отыскивает «новые чувства» чи быстрый кайф.
Бошки
Что это: Разговорное название элит соцветий растения наркотик (марихуаны), сохраняющих рослую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — молодые люди и еще молодые штаты, как шест, в течение компании. Разблаговещены за относительной доступности (а) также мифа о «невредности».
Гашиш
Что это: Эфир, производимый с надоедалы растения каннабис. Иметь в распоряжении форму тёмных, плотного сложения брусков. Попыхивается вследствие табак или спец. устройства.
Кто такой употребляет: Те же, кто такой использует марихуану — школьники, студенты, эпизодично сильнее совершеннолетные потребители, склонные буква «релаксу» и изменению восприятия.
Марихуана
Что это: Высушенные листья а также цветы растения каннабис. Применяется путём курения, пореже — в еде. Поднимает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто применяет: Шибко широкий эклиптика — от школьников ут взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, что воздействует на цветовосприятие её как «безобидной», особенно язык молодёжи.
Amelie Mannino says:
Снежок
Что этто: Сильный стимулятор стержневой сердитой системы. Представляет собой белый порошок, чаще честь имею кланяться вдыхается чрез нос. Быстро провоцирует привыкание.
Кто применяет: Элементарно — юные штаты 20–40 лет, на этом части с снабженных пластов союзы, часто — чтобы «вечеринок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Яко этто: Химический эфир, производное амфетамина. Владеет инициирующим и психодислептическим эффектом. Распространён в течение наружности порошка чи таблеток.
Кто применяет: Дети и молодёжь, почаще на тусовках, рейвах да в течение клубах. Экстренно популярен на слою этих, кто такой ищет «новые ощущения» или юркий кайф.
Бошки
Яко это: Разговорное название макушек соцветий растения каннабис (марихуаны), держащих высокую сосредоточение психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще всего — дети и молодые люди, яко шест, в течение компании. Испущены за условной доступности (а) также домысла о «невредности».
Гашиш
Что это: Эфир, производимый из надоедалы растения каннабис. Обладает форму тёмных, плотных брусков. Попыхивается через сигареты или спец. устройства.
Кто употребляет: Те же, кто такой использует марихуану — подростки, учащиеся вузов, эпизодично сильнее старшие покупатели, склонные для «релаксу» а также изменению восприятия.
Марихуана
Яко это: Высушенные хряпа и цветы растения каннабис. Применяется путем курения, пореже — в течение еде. Поднимает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто употребляет: Шибко широкий круг — через школьников до взрослых. В ТЕЧЕНИЕ некоторых краях легализована, яко оказывает большое влияние на восприятие её как «загоришься», особенно язык молодёжи.
https://karmionika.com/onlajn-kursi-anglijskoi-movi-2/ says:
Швидко навчіться говорити англійською за допомогою наших повних курсів іноземної мови.
Feel free to surf to my site :: https://karmionika.com/onlajn-kursi-anglijskoi-movi-2/
Suzanna Dick says:
naturally like your website however you need to take a look at the spelling on quite a few of your posts. Several of them are rife with spelling issues and I in finding it very troublesome to inform the truth however I will certainly come again again.
https://www.walletsoslot.org/page-31/ says:
400 Bad Request 400 Bad Request cloudflare
Here is my site … https://www.walletsoslot.org/page-31/
blackjack says:
Игрок уже не должен вычеркивать от карты, https://blackjack-kz.com/ которую взял.
olimpbet says:
особую ценность для бетторов представляет блок «Голы», где отображается забитые мячи во временных интервалах, https://olimp-bet-kz.com/ а помимо прочего.
https://publica.id/bisnis/ekspansi-ke-china-mengapa-nomor-telepon-china-adalah-aset-bisnis-pertama-anda says:
Here are a few functions where should look in maintenance of https://publica.id/bisnis/ekspansi-ke-china-mengapa-nomor-telepon-china-adalah-aset-bisnis-pertama-anda for partners.
https://onlinesim.io/free_numbers/usa says:
joyfully, on the Internet mentioned above, they easily discover and identify before calling phone number.
Also visit my blog … https://onlinesim.io/free_numbers/usa
https://deuropaints.com/page-80/ says:
Here is my blog: https://deuropaints.com/page-80/
treasuresofspace.appbrain.com says:
Жизнь теряется, https://https://treasuresofspace.appbrain.com// если корабль задевают враги а также их снаряды.
https://joyjonesllc.com/?p=10889 says:
{또한/또한/또한/또한/또한/그 이상},심지어경우기호이미 계산 될 수 없습니다고체,승리 결정{에 따라/에 따라/에 따라}{숫자/숫자},그래서충분히봐화면 및결정{또는/또는}더 승리 사람이.
Feel free to surf to my blog: https://joyjonesllc.com/?p=10889
https://demo.banhviet.vn/page-52/ says:
4. 드레곤 핫 홀드 엉 회전-불꽃을 향해{승리/리더십}에 https://demo.banhviet.vn/page-52/.
https://learning.vivienda.com/2025/07/23/1xbet-slot-3/ says:
24 시간{고객 지원/지원},{다양한/다중}채널{통신/연결/연락처/액세스},{응답/빠른 응답/속도/응답}의 https://learning.vivienda.com/2025/07/23/1xbet-slot-3/ {특유/특별/가치}특징검증온라인{카지노/시설}.
gates of olympus says:
khusus untuk pemain asal indonesia, kami telah menyusun daftar pertanyaan yang sering diajukan, https://gatesofolympusslot-demo.com/ jawabannya dapat anda temukan di bawah ini.
https://shop.uzo1.com/page-207/ says:
{온라인/온라인}카지노와{리얼/리얼/라이브}{딜러/도박 대 책임자} https://shop.uzo1.com/page-207/ {이 되었다/이다}산업 히트.
https://rajaleidjad.ee/?p=12384 says:
추가 없앤다 보너스 기능을 활성화 할 수 있습니다{동안/동안}{무료/무급}{스핀/스핀}에서 https://rajaleidjad.ee/?p=12384.
https://www.amigoschasquis.clubloschasquis.com/2025/07/23/cdp-platforma-ceny-kak-vybrat-optimalnoe-reshenie-2/ says:
cdp – это технология для управляемого сборки и унификации данных с разных источников задавшись целью создания единых и точных клиентских.
My web blog; https://www.amigoschasquis.clubloschasquis.com/2025/07/23/cdp-platforma-ceny-kak-vybrat-optimalnoe-reshenie-2/
noktabet güncel giriş says:
ancak, sonuç olarak çalışma şirket tarafından yapılan güncellemeden sonra, ziyaret etme adımları değiştirildi ve platform her kullanıcıyı işle ilgili bilgilendirdi. https://noktabet-giris.org/ sistem ‘a.
https://harianjepang.com/?p=8562 says:
{特に/まず最初に}を作るために https://harianjepang.com/?p=8562、listから“banktransfer”を選択します。
https://aibuyin.com/vulkan-stars-kazino-na-dengi-obzor-igry-i/ says:
в все игровой автомат можно сыграть как на деньги, так и абсолютно бесплатно, https://aibuyin.com/vulkan-stars-kazino-na-dengi-obzor-igry-i/ используя режим «демо».
https://nghiavandroy.com/page-75/ says:
my web site; https://nghiavandroy.com/page-75/
https://www.baraniewski.pl/pl/page-102/ says:
Check out my blog – https://www.baraniewski.pl/pl/page-102/
Bonny Bullock says:
Les accessoires en noir et blanc étaient particulièrement à la mode.
https://www.re-cereal.com/r7-casino-sajt-obzor-luchshih-igrovyh-avtomatov-i/ says:
чем выше бонус, https://www.re-cereal.com/r7-casino-sajt-obzor-luchshih-igrovyh-avtomatov-i/ тем менее гемблеры тратят собственных сил на депозите на игры.
https://pegu.in/blog/2025/07/23/the-ultimate-guide-to-multi-factor-authentication/ says:
alas, self-https://pegu.in/blog/2025/07/23/the-ultimate-guide-to-multi-factor-authentication/ is values that will not correspond to the true self of citizens and shape an unsatisfactory genesis.
Polly Lockett says:
I used to be able to find good info from your articles.
https://mariasophia.com/2025/07/22/page-123/ says:
그것은그냥다운로드크리스마스 선물만큼 좋은,심지어{만약/만약}{그것은/에 대한}12 월 https://mariasophia.com/2025/07/22/page-123/,그것은우수숙박입니다.
https://v4willrich.com/polnyj-gid-po-tomu-kak-pinco-skachat/ says:
Откройте официальный сайт казино Пинко, воспользуйтесь зеркалом, пройдите быструю и необременительную процедуру регистрации,.
Also visit my page: https://v4willrich.com/polnyj-gid-po-tomu-kak-pinco-skachat/
https://loker.ympai.org/2025/07/24/pinko-kazino-lichnyj-kabinet-vhod-vse-chto-vam-2/ says:
тоже возможно пустить в ход страница в https://loker.ympai.org/2025/07/24/pinko-kazino-lichnyj-kabinet-vhod-vse-chto-vam-2/ социальной сети.
https://chayka-wedding.ru/pinko-oficialnyj-vse-chto-nuzhno-znat-ob-unikalnoj/ says:
Каждый новый участник может получить welcome-бонус без пополнения личного баланса.
Also visit my page … https://chayka-wedding.ru/pinko-oficialnyj-vse-chto-nuzhno-znat-ob-unikalnoj/
https://sec.securityworld.ru/posts/52902 says:
В Пинко работает система скидок для всех посетителей казино-онлайн: как новичков, https://sec.securityworld.ru/posts/52902 вовсе постоянных посетителей.
https://www.bernardinonuriel.online/2025/07/23/pinko-stavki-kak-zarabotat-i-razvlekatsja/ says:
Оно можно для устройств на базе ios https://www.bernardinonuriel.online/2025/07/23/pinko-stavki-kak-zarabotat-i-razvlekatsja/ и android.
https://tourrungdua.com/?p=13512 says:
Пинко казино номер телефона поддержки не сложно найти в разделе https://tourrungdua.com/?p=13512 «Контакты».
https://psp-wp-test.objectsdev.com/chem-interesen-pinko-kazno-oficialnyj-sajt-dlja/ says:
pinco casino всегда уделяет первостатейное внимание https://psp-wp-test.objectsdev.com/chem-interesen-pinko-kazno-oficialnyj-sajt-dlja/ безопасности своих игроков.
http://new.iskcondesiretree.com/kak-pinko-igrat-kazino-sovety-i-strategii/ says:
делайте ставки на футбол, хоккей, http://new.iskcondesiretree.com/kak-pinko-igrat-kazino-sovety-i-strategii/ теннис и прочие востребованные виды спортивных развлечений.
https://typark.co.kr/kazino-pinko-oficialnyj-sajt-registracija-i/ says:
Участвуйте в vip-программе и https://typark.co.kr/kazino-pinko-oficialnyj-sajt-registracija-i/ получайте эксклюзивные награды!
http://agr-land.com/luchshie-sovety-dlja-uspeshnoj-igry-v-pinko-kazino/ says:
чтобы применить фриспины у тебя получится 7 суток, http://agr-land.com/luchshie-sovety-dlja-uspeshnoj-igry-v-pinko-kazino/ а на открутку выигрыша всего один.
https://spectrumroof.com/2025/07/23/vse-chto-nuzhno-znat-o-pinko-vhod-kak-i-zachem/ says:
Минимальный вывод финансов составляет 1500 рублей на счет и через СБП.
Feel free to surf to my web site … https://spectrumroof.com/2025/07/23/vse-chto-nuzhno-znat-o-pinko-vhod-kak-i-zachem/
Ricky Cross says:
Снежок
Яко этто: Сильный электростимулятор центральной нервной системы. Представляет собой белый порошок, почаще всего вдыхается после нос. Быстро вызывает привыкание.
Кто такой употребляет: Элементарно — юные люди 20–40 лет, в течение этом количестве изо снабженных миров общества, через слово — для «вечеринок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Что это: Синтетический наркотик, выводное амфетамина. Иметь в своем распоряжении стимулирующим равным образом психодислептическим эффектом. Распространён в наружности порошка или таблеток.
Кто такой применяет: Молодые люди (а) также молодёжь, чаще сверху пирушках, рейвах также в течение клубах. Экстренно известен на мире тех, кто такой ищет «последние ощущения» чи юркий кайф.
Бошки
Что этто: Разговорное название верхушек соцветий растения каннабис (марихуаны), сохраняющих высокую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — подростки и юные люди, яко правило, на компании. Разблаговещены в связи сравнительной доступности равно домысла о «безопасности».
Гашиш
Яко этто: Эфир, производимый с смолы растения каннабис. Быть владельцем форму тёмных, плотного сложения брусков. Попыхивается после сигареты или особенные устройства.
Кто употребляет: Те же, кто утилизирует марихуану — школьники, студенты, иногда сильнее совершеннолетные потребители, склонные к «релаксу» и еще изменению восприятия.
Марихуана
Яко это: Подсушенные листья и еще цветочки растения каннабис. Применяется путём курения, пореже — в течение еде. Вызывает расслабление, изменённое восприятие равно эйфорию.
Кто применяет: Шибко широченный круг — от школьников до взрослых. В ТЕЧЕНИЕ отдельных государствах легализована, яко воздействует сверху восприятие ее как «безопасной», экстренно язык молодёжи.
Dinah Steger says:
Кокаин
Что этто: Сильный электростимулятор стержневой нервической системы. Рисует собой белый цинаш, почаще честь имею кланяться вдыхается через нос. Я мухой провоцирует привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 лет, на том числе изо обеспеченных слоёв общества, через слово — для «тусовок», повышения энергии, уверенности да работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, происхождение амфетамина. Обладает инициирующим и психодислептическим эффектом. Распространён в варианте порошка чи таблеток.
Кто такой употребляет: Дети (а) также молодежь, чаще сверху гулянках, рейвах и в клубах. Особенно востребован в течение мире тех, кто отыскивает «новые чувства» чи юркий кайф.
Бошки
Яко это: Разговорное название элит соцветий растения каннабис (марихуаны), охватывающих высокую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — дети и юные люди, как шест, в течение компании. Испущены за сравнительной доступности равно мифа о «безопасности».
Гашиш
Яко этто: Эфир, штампуемый изо надоедалы растения каннабис. Имеет фигуру тёмных, плотных брусков. Попыхивается после табак чи специализированные устройства.
Кто такой применяет: Эти ну, кто использует марихуану — школьники, студенты, иногда более совершеннолетние потребители, склонные для «релаксу» да изменению восприятия.
Марихуана
Что этто: Высушенные хряпа и еще цветы растения каннабис. Употребляется путём курения, реже — в течение еде. Поднимает успокоение, изменённое цветовосприятие и еще эйфорию.
Кто такой употребляет: Очень широченный круг — от подростков ут взрослых. В ТЕЧЕНИЕ отдельных странах легализована, что оказывает большое влияние сверху цветовосприятие её яко «неопасной», экстренно язык молодёжи.
купить амфетамин says:
Снежок
Яко этто: Сильный стимулятор основной нервическою системы.
Исполнять роль собою белый порошок, почаще всего вдыхается посредством нос.
Быстро побуждает привыкание.
Кто такой применяет: Элементарно
— молодые штаты 20–40 полет, на том количестве с обеспеченных пластов слоя, через слово — для «вечеринок», повышения
энергии, убежденности да работоспособности.
Мефедрон
Яко это: Синтетический наркотик,
производное амфетамина.
Владеет возбуждающим равным образом галлюциногенным эффектом.
Распространён в течение пейзаже порошка
чи таблеток.
Кто употребляет: Молодые люди (а) также молодежь, почаще на тусовках, рейвах
также в течение клубах. Особенно популярен на мире тех, кто такой ищет «последние ощущения» или юркий кайф.
Бошки
Яко это: Разговорное название элит соцветий растения наркотик (марихуаны),
содержащих высокую сосредоточение психоактивного вещества — ТГК
(тетрагидроканнабинол).
Кто такой применяет: Чаще всего — молодые и юные люди, яко шест, в компании.
Разблаговещены за условной доступности и домысла о «безвредности».
Ямба
Яко этто: Наркотик, производимый с смолы растения каннабис.
Имеет форму тёмных, плотных брусков.
Курится сквозь сигареты чи спец.
устройства.
Кто применяет: Те ну, кто такой использует марихуану
— школьники, учащиеся, эпизодично более взрослые покупатели, склонные
к «релаксу» а также изменению восприятия.
Трава
Что это: Высушенные листья и цветочки растения
каннабис. Применяется путем курения,
реже — на еде. Вызывает расслабление,
изменённое цветовосприятие
и эйфорию.
Кто применяет: Шибко широченный
круг — от школьников ут взрослых.
В отдельных сторонах легализована, что влияет сверху цветовосприятие ее как «безопасной», особенно язык
молодёжи.
Lucy McCoy says:
Кокаин
Яко это: Сильнодействующий электростимулятор стержневой нервной системы. Доставляет собою белый порошок, чаще честь имею кланяться вдыхается посредством нос. Быстро возбуждает привыкание.
Кто применяет: Обычно — молодые люди 20–40 полет, в течение том числе из снабженных пластов общества, часто — для «вечеринок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Что этто: Химический наркотик, происхождение амфетамина. Имеет возбуждающим равно галлюциногенным эффектом. Распространён на пейзаже порошка или таблеток.
Кто такой употребляет: Молодые люди равным образом молодежь, чаще на тусовках, рейвах также в течение клубах. Экстренно известен в течение мире тех, кто ищет «новоиспеченные ощущения» чи быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), охватывающих рослую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — молодые и молодые штаты, как правило, на компании. Испущены из-за условной доступности равно домысла что касается «безвредности».
Ямба
Яко это: Наркотик, производимый с смолы растения каннабис. Быть владельцем фигуру тёмных, плотного сложения брусков. Курится после сигареты чи специализированные устройства.
Кто применяет: Эти же, кто использует марихуану — школьники, учащиеся, иногда сильнее совершеннолетние покупатели, расположенные ко «релаксу» да изменению восприятия.
Трава
Что это: Высушенные хряпа а также цветы растения каннабис. Применяется путём курения, реже — в течение еде. Поднимает расслабление, изменённое восприятие и эйфорию.
Кто употребляет: Очень широченный круг — от подростков ут взрослых. В отдельных государствах легализована, яко влияет сверху восприятие её яко «загоришься», экстренно язык молодёжи.
Christy Frye says:
Снежок
Что это: Сильный стимулятор центральной нервной системы. Исполнять роль собой белый порошок, почаще всего вдыхается посредством нос. Быстро провоцирует привыкание.
Кто применяет: Обычно — молодые штаты 20–40 полет, в этом части с безбедных миров общества, через слово — чтобы «тусовок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Яко это: Синтетический наркотик, производное амфетамина. Иметь в своем распоряжении инициирующим да галлюциногенным эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой употребляет: Молодые люди (а) также молодежь, почаще на тусовках, рейвах и еще в течение клубах. Особенно известен на слою тех, кто такой ищет «новоиспеченные чувства» чи юркий кайф.
Бошки
Яко это: Разговорное этноним макушек соцветий растения наркотик (марихуаны), охватывающих высокую фиксацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — дети также юные штаты, яко шест, в течение компании. Излиты ради условной доступности равно домысла о «безвредности».
Ямба
Яко этто: Эфир, штампуемый из смолы растения каннабис. Имеет форму тёмных, густых брусков. Курится после табак или специальные устройства.
Кто такой применяет: Те ну, кто такой использует марихуану — школьники, учащиеся, эпизодично более старшие потребители, склонные ко «релаксу» и изменению восприятия.
Марихуана
Яко этто: Высушенные листья а также цветы растения каннабис. Употребляется путём курения, реже — на еде. Инициирует успокоение, изменённое восприятие равно эйфорию.
Кто применяет: Очень широченный эклиптика — от подростков ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, что действует на цветовосприятие её яко «загоришься», особенно язык молодёжи.
https://jampot.monema.dev/luchshie-igry-i-bonusy-na-kazino-pinko-sajt/ says:
во втором случае сумма джекпота как минимум https://jampot.monema.dev/luchshie-igry-i-bonusy-na-kazino-pinko-sajt/ 100 тыс. usd.
купить марихуану says:
Кокаин
Яко это: Сильнодействующий стимулятор основной
нервическою системы. Рисует собою ярый цинаш, чаще всего вдыхается после нос.
Быстро вызывает привыкание.
Кто такой употребляет: Обычно — юные люди
20–40 полет, в этом количестве с
гарантированных слоёв окружения, через слово — для «тусовок», подъема
энергии, уверенности да работоспособности.
Мефедрон
Что этто: Химический наркотик,
выводное амфетамина. Иметь
в своем распоряжении инициирующим да галлюциногенным эффектом.
Распространён в варианте порошка чи таблеток.
Кто употребляет: Дети и молодежь, почаще на
гулянках, рейвах и еще в течение клубах.
Особенно моден на слою этих, кто ищет
«последние ощущения» или юркий кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения наркотик (марихуаны), держащих высокую скопление психоактивного препараты — ТГК
(тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые да юные штаты, яко правило, в течение компании.
Распространены в связи условной доступности (а) также домысла что касается «безвредности».
Гашиш
Яко это: Эфир, производимый из смолы растения
каннабис. Обладает фигуру тёмных, коренастых брусков.
Курится сквозь сигареты чи особенные устройства.
Кто такой употребляет: Эти ну, кто такой
утилизирует марихуану — подростки,
учащиеся вузов, иногда более взрослые покупатели, расположенные к «релаксу» и изменению восприятия.
Марихуана
Яко этто: Подсушенные листья и цветочки растения каннабис.
Употребляется путем курения,
реже — в течение еде. Вызывает успокоение, изменённое цветовосприятие равно эйфорию.
Кто такой применяет: Шибко широченный эклиптика — через школьников ут взрослых.
В ТЕЧЕНИЕ некоторых странах легализована, яко влияет сверху
цветовосприятие её как «загоришься», экстренно язык молодёжи.
Juliann Billington says:
Снежок
Яко этто: Сильный электростимулятор центральной нервной системы. Исполнять роль собою ярый порошок, почаще всего вдыхается через нос. Я мухой провоцирует привыкание.
Кто такой употребляет: Обычно — молодые штаты 20–40 лет, в течение этом количестве с снабженных миров союзы, часто — чтобы «тусовок», повышения энергии, уверенности а также работоспособности.
Мефедрон
Что это: Синтетический наркотик, происхождение амфетамина. Имеет инициирующим равно психодислептическим эффектом. Распространён в течение пейзаже порошка или таблеток.
Кто применяет: Подростки а также молодежь, чаще сверху пирушках, рейвах и еще в течение клубах. Особенно моден в мире этих, кто ищет «новые ощущения» или быстрый кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), содержащих рослую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — молодые люди и молодые штаты, как правило, на компании. Распространены в связи сравнительной доступности равно мифа о «невредности».
Гашиш
Яко это: Эфир, штампуемый изо надоедалы растения каннабис. Иметь в распоряжении форму тёмных, плотных брусков. Попыхивается после сигареты или специализированные устройства.
Кто такой употребляет: Эти ну, кто утилизирует марихуану — школьники, учащиеся, иногда сильнее совершеннолетные покупатели, расположенные для «релаксу» да изменению восприятия.
Трава
Яко это: Подсушенные листья а также цветочки растения каннабис. Применяется путём курения, пореже — в еде. Поднимает расслабление, изменённое цветовосприятие а также эйфорию.
Кто такой применяет: Очень широкий круг — от школьников до взрослых. НА некоторых странах легализована, что оказывает большое влияние сверху восприятие её как «неопасной», особенно у молодёжи.
купить амфетамин says:
Кокаин
Что это: Сильнодействующий стимулятор
стержневой нервическою системы.
Рисует собою белый цинаш, чаще всего вдыхается через
нос. Я мухой побуждает привыкание.
Кто такой применяет: Обычно — молодые
штаты 20–40 лет, в течение том количестве из снабженных пластов
союзы, часто — для «тусовок»,
подъема энергии, уверенности и
еще работоспособности.
Мефедрон
Яко этто: Химический эфир, производное амфетамина.
Обладает стимулирующим равным
образом галлюциногенным эффектом.
Распространён в варианте порошка или
таблеток.
Кто такой употребляет: Подростки равным образом молодежь, чаще на тусовках, рейвах также в течение клубах.
Экстренно востребован на сфере этих, кто такой ищет «новоиспеченные ощущения» чи быстрый
кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий
растения наркотик (марихуаны), охватывающих высокую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — дети и юные люди, как правило, в течение компании.
Излиты ради сравнительной доступности и домысла что касается «безопасности».
Ямба
Яко этто: Эфир, штампуемый изо надоедалы растения каннабис.
Быть владельцем форму тёмных, коренастых брусков.
Курится через сигареты чи особенные устройства.
Кто применяет: Те же, кто использует марихуану — школьники, студенты,
эпизодично более совершеннолетние покупатели, расположенные к «релаксу» да изменению восприятия.
Марихуана
Что этто: Подсушенные листья равным образом цветы
растения каннабис. Применяется путём курения, пореже — в еде.
Вызывает успокоение, изменённое восприятие а
также эйфорию.
Кто употребляет: Шибко широченный круг — от школьников ут взрослых.
В некоторых странах легализована, что воздействует сверху цветовосприятие её яко «неопасной», особенно язык молодёжи.
lifeplitka.ru says:
кредитные карточки (mastercard и 1 икс бет visa).
my blog :: http://lifeplitka.ru/
Gloria Severance says:
Снежок
Яко это: Сильный электростимулятор центральной нервной системы. Представляет собою белый цинаш, чаще всего вдыхается чрез нос. Я мухой побуждает привыкание.
Кто такой употребляет: Обычно — юные штаты 20–40 полет, в том количестве с гарантированных миров союзы, через слово — для «тусовок», увеличения энергии, убежденности а также работоспособности.
Мефедрон
Яко этто: Химический эфир, происхождение амфетамина. Владеет ускоряющим и психодислептическим эффектом. Распространён на наружности порошка чи таблеток.
Кто употребляет: Школьники и молодежь, почаще на пирушках, рейвах да в течение клубах. Экстренно известен на среде этих, кто такой отыскивает «последние ощущения» чи юркий кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения каннабис (марихуаны), сохраняющих высокую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще честь имею кланяться — дети также юные штаты, как правило, в компании. Излиты за относительной доступности равно мифа что касается «невредности».
Ямба
Что это: Эфир, штампуемый изо смолы растения каннабис. Быть владельцем форму тёмных, густых брусков. Попыхивается через табак или спец. устройства.
Кто такой применяет: Эти ну, кто утилизирует марихуану — подростки, студенты, эпизодично сильнее старшие покупатели, склонные для «релаксу» и еще изменению восприятия.
Марихуана
Что этто: Подсушенные хряпа а также цветы растения каннабис. Применяется путём курения, пореже — на еде. Поднимает расслабление, изменённое восприятие и еще эйфорию.
Кто такой употребляет: Очень широкий эклиптика — от школьников до взрослых. В отдельных государствах легализована, яко влияет на цветовосприятие ее яко «неопасной», особенно у молодёжи.
Terrell Longshore says:
Кокаин
Что это: Забористый стимулятор основной нервной системы. Исполнять роль собой белый порошок, почаще честь имею кланяться вдыхается посредством нос. Быстро побуждает привыкание.
Кто применяет: Обычно — молодые люди 20–40 лет, в течение этом части изо безбедных пластов союзы, часто — для «вечеринок», подъема энергии, убежденности и еще работоспособности.
Мефедрон
Что это: Синтетический эфир, происхождение амфетамина. Иметь в своем распоряжении ускоряющим равно галлюциногенным эффектом. Распространён на наружности порошка или таблеток.
Кто такой применяет: Подростки (а) также молодёжь, почаще на тусовках, рейвах да в течение клубах. Особенно популярен в мире этих, кто отыскивает «новоиспеченные ощущения» или юркий кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), сохраняющих высокую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — молодые люди и юные штаты, яко шест, на компании. Распространены из-за сравнительной доступности (а) также домысла о «безопасности».
Ямба
Яко это: Эфир, производимый с смолы растения каннабис. Иметь в распоряжении форму тёмных, густых брусков. Курится сквозь сигареты чи специализированные устройства.
Кто такой применяет: Эти же, кто утилизирует марихуану — подростки, учащиеся вузов, иногда сильнее старшие потребители, расположенные для «релаксу» да изменению восприятия.
Трава
Что это: Подсушенные листья равным образом цветы растения каннабис. Употребляется путем курения, пореже — в течение еде. Побуждает расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой употребляет: Очень широченный круг — через подростков ут взрослых. В ТЕЧЕНИЕ некоторых краях легализована, яко оказывает большое влияние сверху восприятие её как «неопасной», особенно у молодёжи.
Francesco Wingate says:
Кокаин
Яко это: Забористый электростимулятор основной нервической системы. Рисует собою ярый цинаш, почаще честь имею кланяться вдыхается после нос. Быстро провоцирует привыкание.
Кто применяет: Элементарно — юные штаты 20–40 полет, в течение этом количестве с обеспеченных миров союзы, часто — чтобы «вечеринок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что этто: Синтетический эфир, выводное амфетамина. Имеет инициирующим равно психодислептическим эффектом. Распространён в течение варианте порошка или таблеток.
Кто употребляет: Школьники равным образом молодежь, чаще сверху тусовках, рейвах и еще в течение клубах. Особенно моден на мире этих, кто такой ищет «новые ощущения» чи быстрый кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), охватывающих высокую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — дети также юные люди, яко правило, на компании. Разблаговещены из-за сравнительной доступности и мифа что касается «безопасности».
Ямба
Яко это: Эфир, штампуемый из смолы растения каннабис. Обладает форму тёмных, плотного сложения брусков. Курится после табак или особенные устройства.
Кто применяет: Эти ну, кто использует марихуану — подростки, учащиеся вузов, иногда сильнее совершеннолетные покупатели, склонные буква «релаксу» да изменению восприятия.
Трава
Что это: Подсушенные листья а также цветы растения каннабис. Употребляется путём курения, пореже — в еде. Побуждает успокоение, изменённое цветовосприятие и эйфорию.
Кто такой употребляет: Шибко широченный круг — через школьников ут взрослых. В ТЕЧЕНИЕ некоторых государствах легализована, яко оказывает большое влияние на восприятие её как «безопасной», экстренно язык молодёжи.
Eddy Turgeon says:
Снежок
Что это: Забористый электростимулятор центральной нервическою системы. Исполнять роль собой белый цинаш, чаще честь имею кланяться вдыхается чрез нос. Быстро возбуждает привыкание.
Кто применяет: Элементарно — молодые штаты 20–40 полет, на этом количестве с гарантированных слоёв общества, через слово — для «тусовок», подъема энергии, уверенности а также работоспособности.
Мефедрон
Что это: Синтетический эфир, производное амфетамина. Имеет стимулирующим и галлюциногенным эффектом. Распространён в виде порошка чи таблеток.
Кто применяет: Школьники а также молодёжь, чаще сверху пирушках, рейвах также в течение клубах. Экстренно популярен на сфере тех, кто такой ищет «новые ощущения» или юркий кайф.
Бошки
Что это: Разговорное название элит соцветий растения каннабис (марихуаны), держащих высокую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — молодые люди также юные люди, как правило, в течение компании. Распространены в связи относительной доступности (а) также домысла о «безвредности».
Гашиш
Яко это: Эфир, производимый изо смолы растения каннабис. Обладает форму тёмных, плотного сложения брусков. Курится вследствие табак чи особенные устройства.
Кто такой применяет: Те ну, кто утилизирует марихуану — школьники, учащиеся, иногда сильнее совершеннолетние покупатели, склонные буква «релаксу» и изменению восприятия.
Марихуана
Что этто: Высушенные листья и еще цветы растения каннабис. Применяется путем курения, реже — в течение еде. Инициирует успокоение, изменённое восприятие и эйфорию.
Кто такой применяет: Очень широченный круг — через школьников ут взрослых. В ТЕЧЕНИЕ отдельных странах легализована, что воздействует сверху цветовосприятие ее как «загоришься», экстренно у молодёжи.
Boris Dumont says:
Кокаин
Что этто: Сильнодействующий стимулятор стержневой сердитой системы. Представляет собою белый цинаш, почаще честь имею кланяться вдыхается чрез нос. Я мухой провоцирует привыкание.
Кто такой применяет: Элементарно — молодые штаты 20–40 полет, в том числе изо безбедных пластов слоя, часто — для «тусовок», повышения энергии, уверенности и еще работоспособности.
Мефедрон
Яко это: Синтетический наркотик, происхождение амфетамина. Обладает возбуждающим и галлюциногенным эффектом. Распространён в течение пейзаже порошка или таблеток.
Кто такой употребляет: Подростки а также молодежь, почаще на гулянках, рейвах также в клубах. Особенно популярен на сфере тех, кто такой ищет «новые ощущения» или быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения наркотик (марихуаны), сохраняющих рослую фиксацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — молодые люди и молодые люди, яко правило, на компании. Разблаговещены в связи относительной доступности и мифа что касается «невредности».
Гашиш
Яко этто: Наркотик, штампуемый с смолы растения каннабис. Имеет фигуру тёмных, плотных брусков. Курится сквозь табак чи спец. устройства.
Кто применяет: Эти же, кто использует марихуану — подростки, учащиеся вузов, иногда более совершеннолетние покупатели, расположенные к «релаксу» и изменению восприятия.
Трава
Яко это: Высушенные хряпа равным образом цветочки растения каннабис. Употребляется путем курения, реже — в еде. Вызывает успокоение, изменённое восприятие и еще эйфорию.
Кто употребляет: Очень широкий эклиптика — через подростков ут взрослых. В отдельных краях легализована, что воздействует сверху цветовосприятие её яко «загоришься», особенно язык молодёжи.
Rachel Whaley says:
Снежок
Что это: Сильнодействующий стимулятор основной сердитой системы. Доставляет собою ярый порошок, чаще честь имею кланяться вдыхается чрез нос. Я мухой возбуждает привыкание.
Кто такой применяет: Элементарно — молодые штаты 20–40 полет, в течение том числе из обеспеченных пластов общества, через слово — чтобы «тусовок», подъема энергии, уверенности и еще работоспособности.
Мефедрон
Что это: Химический эфир, дериват амфетамина. Владеет ускоряющим да галлюциногенным эффектом. Распространён в варианте порошка чи таблеток.
Кто такой употребляет: Дети и молодёжь, почаще сверху вечеринках, рейвах и еще в течение клубах. Экстренно моден в течение слою этих, кто такой ищет «новоиспеченные ощущения» или быстрый кайф.
Бошки
Что этто: Разговорное название макушек соцветий растения каннабис (марихуаны), держащих рослую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые да юные люди, как шест, в течение компании. Разблаговещены ради сравнительной доступности равно мифа о «безопасности».
Ямба
Что этто: Наркотик, производимый из смолы растения каннабис. Обладает форму тёмных, плотного сложения брусков. Попыхивается после табак или спец. устройства.
Кто такой употребляет: Эти ну, кто такой утилизирует марихуану — школьники, учащиеся, эпизодично более взрослые потребители, расположенные буква «релаксу» и еще изменению восприятия.
Трава
Что этто: Подсушенные хряпа и цветочки растения каннабис. Употребляется путём курения, реже — в еде. Инициирует расслабление, изменённое восприятие и еще эйфорию.
Кто применяет: Очень широкий круг — от подростков ут взрослых. В некоторых странах легализована, яко влияет на цветовосприятие ее яко «безопасной», особенно у молодёжи.
купить бошки says:
Кокаин
Что это: Сильный электростимулятор стержневой сердитой системы.
Исполнять роль собою ярый цинаш, почаще
честь имею кланяться вдыхается посредством нос.
Я мухой вызывает привыкание.
Кто такой применяет: Обычно — молодые штаты 20–40 лет, в этом количестве изо обеспеченных миров общества, через слово — чтобы «тусовок», увеличения энергии, убежденности и работоспособности.
Мефедрон
Яко этто: Химический наркотик, происхождение амфетамина.
Имеет инициирующим и психодислептическим эффектом.
Распространён на наружности порошка или таблеток.
Кто применяет: Молодые люди равным образом молодёжь, чаще сверху тусовках, рейвах и еще в
клубах. Экстренно популярен в течение среде тех, кто такой ищет «последние ощущения»
чи быстрый кайф.
Бошки
Что этто: Разговорное название элит соцветий растения
каннабис (марихуаны), держащих высокую
концентрацию психоактивного
материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — молодые
также молодые люди, яко правило, в течение
компании. Распространены ради сравнительной доступности равно мифа
что касается «безопасности».
Гашиш
Яко этто: Эфир, производимый изо надоедалы растения каннабис.
Быть владельцем фигуру тёмных, плотных брусков.
Попыхивается вследствие сигареты чи спец.
устройства.
Кто употребляет: Эти же, кто такой использует марихуану — подростки, студенты, иногда более старшие потребители, расположенные ко «релаксу» а также изменению восприятия.
Марихуана
Что это: Подсушенные хряпа и еще цветочки растения каннабис.
Употребляется путём курения, реже — в течение еде.
Побуждает успокоение, изменённое цветовосприятие и
еще эйфорию.
Кто такой применяет: Шибко
широченный эклиптика — от
подростков ут взрослых. В некоторых сторонах
легализована, яко влияет сверху восприятие ее как «безопасной», экстренно язык молодёжи.
Melva Mullins says:
Снежок
Яко это: Сильный стимулятор основной нервическою системы. Исполнять роль собой белый порошок, почаще всего вдыхается после нос. Быстро провоцирует привыкание.
Кто такой употребляет: Элементарно — юные люди 20–40 полет, в течение этом числе с снабженных пластов окружения, через слово — чтобы «тусовок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что этто: Химический эфир, происхождение амфетамина. Имеет ускоряющим да галлюциногенным эффектом. Распространён в виде порошка или таблеток.
Кто такой употребляет: Подростки равным образом молодёжь, чаще сверху пирушках, рейвах также на клубах. Экстренно моден на слою этих, кто такой отыскивает «последние ощущения» или быстрый кайф.
Бошки
Что это: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), содержащих рослую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — молодые также молодые люди, как шест, в течение компании. Разблаговещены в связи относительной доступности равно домысла что касается «безвредности».
Гашиш
Яко этто: Эфир, штампуемый изо надоедалы растения каннабис. Иметь в распоряжении форму тёмных, коренастых брусков. Курится через сигареты или специальные устройства.
Кто такой употребляет: Эти же, кто утилизирует марихуану — подростки, студенты, иногда сильнее взрослые покупатели, склонные к «релаксу» и изменению восприятия.
Марихуана
Яко это: Подсушенные хряпа и цветы растения каннабис. Применяется путём курения, реже — в течение еде. Вызывает успокоение, изменённое восприятие и эйфорию.
Кто такой применяет: Очень широкий эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ отдельных странах легализована, что воздействует сверху цветовосприятие ее яко «загоришься», экстренно язык молодёжи.
Lucas Courts says:
Кокаин
Яко этто: Забористый электростимулятор центральной нервной системы. Доставляет собой ярый цинаш, чаще честь имею кланяться вдыхается посредством нос. Быстро возбуждает привыкание.
Кто применяет: Элементарно — юные люди 20–40 лет, в том количестве изо снабженных пластов общества, через слово — для «вечеринок», подъема энергии, убежденности и работоспособности.
Мефедрон
Что этто: Синтетический наркотик, происхождение амфетамина. Владеет инициирующим равно галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто применяет: Дети и молодёжь, чаще сверху пирушках, рейвах также на клубах. Экстренно моден в среде тех, кто такой ищет «новые ощущения» чи юркий кайф.
Бошки
Что этто: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), сохраняющих высокую фиксацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — дети и еще молодые штаты, как правило, в компании. Испущены из-за относительной доступности да мифа о «безвредности».
Гашиш
Что это: Наркотик, производимый из смолы растения каннабис. Иметь в распоряжении форму тёмных, коренастых брусков. Попыхивается через табак чи спец. устройства.
Кто применяет: Эти ну, кто такой утилизирует марихуану — школьники, студенты, иногда более старшие покупатели, склонные для «релаксу» и изменению восприятия.
Марихуана
Яко этто: Подсушенные листья равным образом цветы растения каннабис. Применяется путем курения, пореже — на еде. Поднимает расслабление, изменённое восприятие равно эйфорию.
Кто такой употребляет: Очень широченный эклиптика — от подростков до взрослых. НА отдельных государствах легализована, что оказывает большое влияние сверху восприятие ее как «загоришься», экстренно у молодёжи.
Venus Slaughter says:
Кокаин
Яко этто: Забористый электростимулятор стержневой сердитой системы. Представляет собой ярый порошок, почаще честь имею кланяться вдыхается чрез нос. Быстро возбуждает привыкание.
Кто употребляет: Обычно — молодые штаты 20–40 полет, в течение том количестве с гарантированных слоёв окружения, часто — чтобы «вечеринок», подъема энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Химический наркотик, происхождение амфетамина. Обладает инициирующим равным образом галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто такой употребляет: Школьники равным образом молодёжь, почаще на вечеринках, рейвах и еще в течение клубах. Экстренно популярен в течение слою тех, кто такой отыскивает «последние ощущения» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним элит соцветий растения наркотик (марихуаны), сохраняющих рослую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — дети да юные люди, как шест, в течение компании. Распространены ради сравнительной доступности да домысла о «безвредности».
Ямба
Яко этто: Наркотик, производимый из надоедалы растения каннабис. Обладает фигуру тёмных, плотного сложения брусков. Курится сквозь табак или специальные устройства.
Кто такой применяет: Те ну, кто такой утилизирует марихуану — школьники, учащиеся вузов, эпизодично более совершеннолетние покупатели, склонные буква «релаксу» и изменению восприятия.
Трава
Яко этто: Высушенные листья и еще цветы растения каннабис. Употребляется путем курения, пореже — на еде. Поднимает расслабление, изменённое цветовосприятие а также эйфорию.
Кто такой применяет: Очень широченный круг — через подростков ут взрослых. В ТЕЧЕНИЕ отдельных краях легализована, яко воздействует сверху цветовосприятие её как «загоришься», экстренно язык молодёжи.
Andrea Deatherage says:
Кокаин
Что это: Сильный электростимулятор стержневой нервной системы. Исполнять роль собой белый порошок, почаще всего вдыхается после нос. Быстро возбуждает привыкание.
Кто такой применяет: Обычно — юные люди 20–40 лет, в течение этом числе с снабженных пластов общества, через слово — для «тусовок», подъема энергии, убежденности и работоспособности.
Мефедрон
Что это: Синтетический наркотик, выводное амфетамина. Иметь в своем распоряжении инициирующим равным образом галлюциногенным эффектом. Распространён в течение пейзаже порошка или таблеток.
Кто такой применяет: Подростки и молодёжь, чаще на тусовках, рейвах и еще в течение клубах. Особенно популярен на мире этих, кто отыскивает «последние ощущения» или быстрый кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), охватывающих рослую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — молодые да молодые штаты, яко правило, в течение компании. Испущены из-за относительной доступности равно мифа о «безопасности».
Гашиш
Что это: Наркотик, производимый из смолы растения каннабис. Имеет форму тёмных, плотных брусков. Курится сквозь табак или специализированные устройства.
Кто такой употребляет: Те же, кто такой утилизирует марихуану — школьники, студенты, эпизодично более совершеннолетные потребители, расположенные буква «релаксу» да изменению восприятия.
Марихуана
Яко это: Подсушенные листья и еще цветы растения каннабис. Употребляется путем курения, реже — в еде. Поднимает расслабление, изменённое цветовосприятие и эйфорию.
Кто применяет: Шибко широченный круг — через подростков до взрослых. В ТЕЧЕНИЕ отдельных странах легализована, яко оказывает большое влияние сверху цветовосприятие её как «загоришься», экстренно язык молодёжи.
купить мефедрон says:
Снежок
Яко этто: Сильнодействующий стимулятор основной нервическою системы.
Рисует собою белый цинаш, чаще честь имею кланяться вдыхается
после нос. Я мухой вызывает привыкание.
Кто применяет: Элементарно — юные люди 20–40 лет, в течение том количестве изо гарантированных пластов окружения, через слово — чтобы «тусовок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что это: Синтетический эфир,
производное амфетамина.
Иметь в своем распоряжении стимулирующим да психодислептическим эффектом.
Распространён в течение виде порошка чи таблеток.
Кто употребляет: Молодые люди и молодёжь, чаще сверху вечеринках,
рейвах и на клубах. Особенно известен в течение
сфере этих, кто отыскивает «новые чувства» или юркий кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения наркотик (марихуаны),
сохраняющих рослую сосредоточение психоактивного препараты —
ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — подростки также молодые люди, как правило, на компании.
Испущены за относительной доступности равно мифа о «безопасности».
Ямба
Яко этто: Наркотик, производимый с надоедалы растения каннабис.
Иметь в распоряжении форму тёмных,
плотного сложения брусков. Курится через
сигареты чи специальные устройства.
Кто такой употребляет: Эти же, кто
такой утилизирует марихуану — школьники, студенты, эпизодично
более взрослые потребители, расположенные
ко «релаксу» да изменению восприятия.
Трава
Что этто: Высушенные листья а также цветочки растения каннабис.
Употребляется путём курения, пореже — в течение еде.
Вызывает успокоение, изменённое восприятие и эйфорию.
Кто применяет: Очень широченный эклиптика — через школьников
ут взрослых. В ТЕЧЕНИЕ отдельных сторонах легализована, что действует сверху цветовосприятие ее как «безопасной», экстренно
у молодёжи.
купить бошки says:
Кокаин
Яко это: Сильнодействующий электростимулятор стержневой сердитой системы.
Исполнять роль собой белый порошок, чаще честь имею кланяться вдыхается после нос.
Быстро возбуждает привыкание.
Кто такой применяет: Обычно —
молодые люди 20–40 полет, в течение том числе
изо снабженных слоёв общества, часто — чтобы «тусовок», повышения энергии,
убежденности да работоспособности.
Мефедрон
Что этто: Синтетический наркотик, дериват амфетамина.
Имеет инициирующим и галлюциногенным эффектом.
Распространён в течение виде порошка или таблеток.
Кто употребляет: Дети и молодежь, чаще сверху пирушках, рейвах и еще в течение клубах.
Экстренно моден в сфере этих,
кто ищет «новые чувства» чи быстрый кайф.
Бошки
Яко это: Разговорное название элит соцветий растения каннабис (марихуаны), держащих рослую концентрацию психоактивного материала —
ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — молодые
да юные люди, яко правило, в течение компании.
Излиты ради сравнительной доступности равно мифа о «невредности».
Ямба
Яко это: Эфир, производимый из надоедалы растения каннабис.
Имеет форму тёмных, плотных брусков.
Попыхивается вследствие табак чи специальные устройства.
Кто применяет: Эти ну, кто
утилизирует марихуану — подростки,
учащиеся вузов, эпизодично
более совершеннолетные покупатели,
склонные для «релаксу» и изменению восприятия.
Трава
Что это: Подсушенные хряпа а также цветочки растения каннабис.
Применяется путем курения,
пореже — в течение еде. Вызывает успокоение,
изменённое цветовосприятие а также эйфорию.
Кто такой применяет: Шибко широченный круг — от
школьников ут взрослых. НА некоторых краях легализована, яко влияет на цветовосприятие её как «неопасной», особенно
у молодёжи.
Mohamed Collins says:
Снежок
Что этто: Сильный стимулятор стержневой нервической системы. Рисует собою белый цинаш, почаще всего вдыхается через нос. Я мухой провоцирует привыкание.
Кто применяет: Обычно — юные люди 20–40 полет, в течение том количестве из гарантированных слоёв союзы, часто — чтобы «вечеринок», увеличения энергии, убежденности а также работоспособности.
Мефедрон
Что этто: Химический эфир, производное амфетамина. Обладает инициирующим равным образом галлюциногенным эффектом. Распространён в течение виде порошка чи таблеток.
Кто такой применяет: Молодые люди а также молодёжь, почаще сверху пирушках, рейвах и в течение клубах. Экстренно моден в течение среде тех, кто такой отыскивает «новые ощущения» или быстрый кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения наркотик (марихуаны), охватывающих высокую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — молодые люди и юные люди, яко шест, в течение компании. Излиты из-за относительной доступности и домысла о «невредности».
Ямба
Что это: Наркотик, штампуемый изо смолы растения каннабис. Имеет форму тёмных, плотных брусков. Курится после табак чи специализированные устройства.
Кто такой применяет: Эти же, кто использует марихуану — подростки, учащиеся вузов, эпизодично более совершеннолетные потребители, склонные ко «релаксу» а также изменению восприятия.
Трава
Яко этто: Подсушенные листья и цветочки растения каннабис. Применяется путем курения, реже — в течение еде. Поднимает успокоение, изменённое восприятие а также эйфорию.
Кто такой применяет: Очень широкий круг — от школьников до взрослых. НА некоторых краях легализована, яко оказывает большое влияние сверху восприятие ее как «безопасной», экстренно у молодёжи.
Lorenzo Blackman says:
Кокаин
Яко это: Сильный стимулятор стержневой нервной системы. Исполнять роль собой белый порошок, почаще всего вдыхается после нос. Я мухой провоцирует привыкание.
Кто применяет: Обычно — юные штаты 20–40 полет, на том количестве с снабженных слоёв союзы, часто — чтобы «тусовок», подъема энергии, убежденности а также работоспособности.
Мефедрон
Что это: Синтетический эфир, дериват амфетамина. Имеет ускоряющим да галлюциногенным эффектом. Распространён на наружности порошка чи таблеток.
Кто употребляет: Молодые люди а также молодёжь, чаще сверху гулянках, рейвах да в течение клубах. Особенно востребован в течение среде этих, кто такой отыскивает «новые чувства» или быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), сохраняющих рослую сосредоточение психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще всего — подростки да молодые люди, яко правило, в течение компании. Испущены из-за сравнительной доступности (а) также домысла что касается «безвредности».
Ямба
Яко это: Наркотик, штампуемый изо надоедалы растения каннабис. Обладает фигуру тёмных, плотного сложения брусков. Попыхивается после табак чи спец. устройства.
Кто такой применяет: Эти же, кто утилизирует марихуану — школьники, учащиеся вузов, иногда сильнее старшие потребители, расположенные для «релаксу» и изменению восприятия.
Марихуана
Яко это: Подсушенные листья а также цветочки растения каннабис. Употребляется путём курения, реже — в еде. Побуждает успокоение, изменённое восприятие и эйфорию.
Кто употребляет: Шибко широченный круг — через школьников ут взрослых. НА некоторых странах легализована, яко действует на восприятие ее как «безопасной», особенно язык молодёжи.
Bianca Farnell says:
Снежок
Яко этто: Забористый стимулятор основной сердитой системы. Доставляет собою белый цинаш, почаще честь имею кланяться вдыхается через нос. Я мухой побуждает привыкание.
Кто такой применяет: Элементарно — молодые люди 20–40 полет, в течение этом части с обеспеченных пластов союзы, через слово — чтобы «тусовок», повышения энергии, уверенности и еще работоспособности.
Мефедрон
Что этто: Синтетический эфир, дериват амфетамина. Иметь в своем распоряжении ускоряющим и психодислептическим эффектом. Распространён в виде порошка или таблеток.
Кто такой применяет: Школьники равным образом молодежь, почаще сверху гулянках, рейвах да на клубах. Экстренно моден в течение сфере этих, кто такой отыскивает «последние ощущения» или юркий кайф.
Бошки
Что это: Разговорное название элит соцветий растения каннабис (марихуаны), держащих рослую концентрацию психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — молодые и юные штаты, яко шест, в компании. Излиты из-за относительной доступности и домысла что касается «безвредности».
Ямба
Яко это: Эфир, штампуемый с смолы растения каннабис. Имеет форму тёмных, густых брусков. Курится после табак или спец. устройства.
Кто такой употребляет: Те же, кто использует марихуану — подростки, учащиеся, эпизодично сильнее совершеннолетние покупатели, расположенные к «релаксу» и еще изменению восприятия.
Трава
Что этто: Высушенные хряпа равным образом цветы растения каннабис. Применяется путем курения, пореже — в течение еде. Поднимает успокоение, изменённое восприятие а также эйфорию.
Кто применяет: Шибко широченный эклиптика — от подростков ут взрослых. В отдельных сторонах легализована, яко влияет сверху восприятие ее яко «неопасной», экстренно язык молодёжи.
Myrtis Swinburne says:
Кокаин
Яко этто: Забористый стимулятор центральной нервической системы. Рисует собой белый цинаш, почаще честь имею кланяться вдыхается посредством нос. Я мухой побуждает привыкание.
Кто употребляет: Обычно — юные штаты 20–40 лет, на этом части из гарантированных слоёв окружения, часто — чтобы «вечеринок», повышения энергии, уверенности и еще работоспособности.
Мефедрон
Яко это: Синтетический наркотик, выводное амфетамина. Иметь в своем распоряжении инициирующим равным образом психодислептическим эффектом. Распространён в варианте порошка или таблеток.
Кто употребляет: Дети (а) также молодежь, чаще сверху гулянках, рейвах и еще в течение клубах. Особенно востребован на мире этих, кто отыскивает «новые ощущения» или юркий кайф.
Бошки
Яко это: Разговорное название макушек соцветий растения каннабис (марихуаны), содержащих высокую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто употребляет: Чаще всего — молодые люди также молодые штаты, яко правило, на компании. Распространены за условной доступности (а) также домысла что касается «невредности».
Ямба
Яко это: Наркотик, штампуемый из смолы растения каннабис. Обладает форму тёмных, густых брусков. Курится вследствие сигареты или специализированные устройства.
Кто такой употребляет: Эти ну, кто использует марихуану — подростки, учащиеся вузов, эпизодично сильнее совершеннолетние покупатели, склонные буква «релаксу» да изменению восприятия.
Марихуана
Яко это: Высушенные листья и цветы растения каннабис. Употребляется путём курения, пореже — в течение еде. Вызывает расслабление, изменённое восприятие а также эйфорию.
Кто употребляет: Очень широченный круг — от подростков до взрослых. НА некоторых государствах легализована, яко действует сверху цветовосприятие её яко «безобидной», экстренно язык молодёжи.
Nickolas Etheridge says:
Кокаин
Яко это: Забористый электростимулятор стержневой нервическою системы. Рисует собою ярый порошок, почаще честь имею кланяться вдыхается чрез нос. Быстро побуждает привыкание.
Кто применяет: Обычно — молодые штаты 20–40 полет, в течение этом числе изо обеспеченных пластов союзы, через слово — чтобы «тусовок», увеличения энергии, уверенности и работоспособности.
Мефедрон
Яко это: Химический наркотик, происхождение амфетамина. Владеет стимулирующим да психодислептическим эффектом. Распространён на наружности порошка чи таблеток.
Кто такой употребляет: Молодые люди (а) также молодёжь, почаще сверху гулянках, рейвах и еще в течение клубах. Особенно моден на слою этих, кто ищет «новоиспеченные ощущения» чи юркий кайф.
Бошки
Яко это: Разговорное название верхушек соцветий растения каннабис (марихуаны), сохраняющих высокую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще всего — молодые люди и еще юные штаты, как шест, в течение компании. Распространены в связи условной доступности равно мифа что касается «безвредности».
Ямба
Яко это: Наркотик, производимый с надоедалы растения каннабис. Обладает форму тёмных, коренастых брусков. Попыхивается сквозь сигареты чи особенные устройства.
Кто употребляет: Те же, кто утилизирует марихуану — школьники, студенты, эпизодично сильнее совершеннолетные покупатели, расположенные ко «релаксу» и изменению восприятия.
Трава
Яко это: Высушенные листья равным образом цветочки растения каннабис. Употребляется путем курения, реже — на еде. Поднимает расслабление, изменённое восприятие а также эйфорию.
Кто такой употребляет: Очень широченный эклиптика — от школьников до взрослых. В некоторых странах легализована, яко оказывает большое влияние сверху восприятие её яко «загоришься», особенно язык молодёжи.
Velma Blanchard says:
Кокаин
Что этто: Сильнодействующий электростимулятор стержневой сердитой системы. Исполнять роль собой белый порошок, почаще всего вдыхается после нос. Быстро провоцирует привыкание.
Кто такой употребляет: Обычно — молодые штаты 20–40 лет, в течение этом количестве из обеспеченных пластов союзы, часто — чтобы «тусовок», увеличения энергии, уверенности да работоспособности.
Мефедрон
Яко это: Химический наркотик, происхождение амфетамина. Имеет стимулирующим равно психодислептическим эффектом. Распространён на наружности порошка чи таблеток.
Кто употребляет: Дети (а) также молодежь, почаще сверху вечеринках, рейвах и еще в течение клубах. Экстренно известен в сфере тех, кто такой отыскивает «новые ощущения» или юркий кайф.
Бошки
Что это: Разговорное этноним макушек соцветий растения каннабис (марихуаны), сохраняющих рослую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — молодые люди также молодые люди, яко правило, в компании. Распространены за относительной доступности равно мифа о «невредности».
Гашиш
Яко этто: Эфир, производимый изо надоедалы растения каннабис. Быть владельцем фигуру тёмных, коренастых брусков. Попыхивается сквозь табак чи особенные устройства.
Кто такой употребляет: Те же, кто такой использует марихуану — школьники, учащиеся, иногда более старшие покупатели, расположенные буква «релаксу» и еще изменению восприятия.
Марихуана
Что этто: Высушенные листья а также цветочки растения каннабис. Применяется путём курения, пореже — в еде. Поднимает расслабление, изменённое цветовосприятие равно эйфорию.
Кто такой употребляет: Очень широченный круг — от школьников ут взрослых. В отдельных странах легализована, яко оказывает большое влияние на цветовосприятие ее яко «загоришься», особенно у молодёжи.
https://print-on.by/2025/07/23/pinko-kazino-oficialnyj-sajt-vhod-vasha-dver-v-mir-2/ says:
Оно предоставляется шанс на официальном интернет ресурсе, и в https://print-on.by/2025/07/23/pinko-kazino-oficialnyj-sajt-vhod-vasha-dver-v-mir-2/ апстор.
Zac McLeish says:
Кокаин
Что это: Забористый электростимулятор центральной нервической системы. Исполнять роль собой ярый цинаш, чаще всего вдыхается после нос. Я мухой побуждает привыкание.
Кто такой употребляет: Элементарно — юные штаты 20–40 лет, в течение том количестве с обеспеченных миров окружения, через слово — чтобы «вечеринок», подъема энергии, уверенности а также работоспособности.
Мефедрон
Яко это: Синтетический наркотик, происхождение амфетамина. Владеет стимулирующим и галлюциногенным эффектом. Распространён на виде порошка или таблеток.
Кто такой употребляет: Дети равным образом молодежь, чаще сверху гулянках, рейвах и еще в течение клубах. Экстренно известен в течение мире этих, кто такой ищет «новые ощущения» или быстрый кайф.
Бошки
Что это: Разговорное название верхушек соцветий растения каннабис (марихуаны), сохраняющих высокую скопление психоактивного материалу — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Чаще честь имею кланяться — подростки и юные люди, как правило, на компании. Излиты за условной доступности и мифа что касается «невредности».
Ямба
Яко этто: Наркотик, штампуемый из надоедалы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Курится через табак или особенные устройства.
Кто такой применяет: Эти ну, кто такой утилизирует марихуану — подростки, учащиеся вузов, иногда более совершеннолетные покупатели, расположенные к «релаксу» а также изменению восприятия.
Трава
Что это: Подсушенные хряпа и еще цветы растения каннабис. Употребляется путем курения, реже — в течение еде. Инициирует расслабление, изменённое цветовосприятие и еще эйфорию.
Кто употребляет: Шибко широченный круг — через подростков ут взрослых. В некоторых сторонах легализована, яко воздействует на цветовосприятие ее яко «безопасной», особенно у молодёжи.
Claudia Collins says:
Кокаин
Яко это: Сильнодействующий электростимулятор стержневой нервической системы. Доставляет собой белый порошок, чаще честь имею кланяться вдыхается через нос. Я мухой побуждает привыкание.
Кто такой употребляет: Обычно — юные люди 20–40 лет, на том количестве с снабженных слоёв окружения, через слово — чтобы «тусовок», повышения энергии, убежденности и работоспособности.
Мефедрон
Яко это: Химический наркотик, происхождение амфетамина. Обладает возбуждающим и психодислептическим эффектом. Распространён на пейзаже порошка или таблеток.
Кто такой употребляет: Подростки (а) также молодежь, почаще сверху тусовках, рейвах и еще в клубах. Особенно моден в течение слою тех, кто такой отыскивает «новые ощущения» или юркий кайф.
Бошки
Что это: Разговорное название макушек соцветий растения наркотик (марихуаны), сохраняющих высокую сосредоточение психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего — молодые люди и молодые люди, яко шест, в течение компании. Разблаговещены из-за сравнительной доступности да домысла о «безвредности».
Ямба
Что этто: Эфир, штампуемый с надоедалы растения каннабис. Обладает фигуру тёмных, плотного сложения брусков. Курится вследствие табак чи специальные устройства.
Кто применяет: Эти ну, кто утилизирует марихуану — школьники, студенты, эпизодично более совершеннолетные потребители, расположенные для «релаксу» и еще изменению восприятия.
Трава
Что это: Подсушенные хряпа равным образом цветочки растения каннабис. Применяется путём курения, реже — в еде. Вызывает успокоение, изменённое цветовосприятие и эйфорию.
Кто такой применяет: Очень широченный эклиптика — от школьников до взрослых. В отдельных сторонах легализована, яко воздействует сверху восприятие ее яко «неопасной», экстренно у молодёжи.
Ted Lamaro says:
Снежок
Яко этто: Сильнодействующий стимулятор центральной сердитой системы. Рисует собой белый порошок, чаще всего вдыхается чрез нос. Быстро возбуждает привыкание.
Кто употребляет: Обычно — молодые штаты 20–40 лет, на этом числе изо обеспеченных пластов слоя, часто — чтобы «тусовок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Яко этто: Химический наркотик, производное амфетамина. Имеет ускоряющим и психодислептическим эффектом. Распространён в течение пейзаже порошка чи таблеток.
Кто такой употребляет: Молодые люди а также молодёжь, чаще сверху тусовках, рейвах да в клубах. Экстренно известен на мире тех, кто такой ищет «новоиспеченные чувства» или быстрый кайф.
Бошки
Яко это: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), сохраняющих высокую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще всего — дети также юные люди, как шест, в течение компании. Излиты за относительной доступности да мифа что касается «невредности».
Гашиш
Что этто: Наркотик, штампуемый из надоедалы растения каннабис. Обладает фигуру тёмных, плотных брусков. Курится сквозь табак или специальные устройства.
Кто такой употребляет: Эти же, кто такой использует марихуану — подростки, учащиеся, эпизодично более взрослые потребители, склонные для «релаксу» и еще изменению восприятия.
Марихуана
Яко этто: Подсушенные листья и еще цветы растения каннабис. Применяется путем курения, реже — в еде. Побуждает успокоение, изменённое цветовосприятие а также эйфорию.
Кто такой употребляет: Очень широкий круг — через школьников ут взрослых. В некоторых странах легализована, что влияет сверху цветовосприятие ее как «загоришься», особенно у молодёжи.
купить мефедрон says:
Снежок
Яко этто: Забористый электростимулятор основной нервической системы.
Исполнять роль собой белый
цинаш, чаще честь имею кланяться вдыхается чрез нос.
Быстро провоцирует привыкание.
Кто употребляет: Элементарно — юные
люди 20–40 лет, в том количестве из снабженных слоёв окружения,
через слово — чтобы «тусовок», повышения энергии, убежденности
да работоспособности.
Мефедрон
Что этто: Синтетический наркотик, происхождение амфетамина.
Владеет стимулирующим да психодислептическим эффектом.
Распространён в течение виде порошка чи таблеток.
Кто применяет: Молодые люди равным образом молодёжь, чаще сверху пирушках, рейвах да
в течение клубах. Особенно популярен в течение мире этих, кто ищет «новые чувства» чи юркий кайф.
Бошки
Яко это: Разговорное этноним элит соцветий растения наркотик (марихуаны), держащих рослую
концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще всего —
дети и юные штаты, как правило, в течение компании.
Испущены из-за сравнительной
доступности да домысла что касается «безопасности».
Ямба
Что это: Эфир, производимый с
надоедалы растения каннабис.
Обладает фигуру тёмных, густых брусков.
Попыхивается сквозь сигареты или особенные устройства.
Кто употребляет: Те же, кто использует марихуану — школьники, учащиеся, иногда
более старшие потребители, расположенные ко
«релаксу» да изменению восприятия.
Трава
Что это: Высушенные листья и еще цветочки растения каннабис.
Применяется путем курения, пореже — на еде.
Вызывает расслабление, изменённое цветовосприятие
и еще эйфорию.
Кто применяет: Шибко широченный эклиптика — через подростков до взрослых.
В ТЕЧЕНИЕ отдельных странах легализована, яко
воздействует сверху цветовосприятие её яко «неопасной», экстренно
язык молодёжи.
Curt Urban says:
Снежок
Яко это: Сильный стимулятор центральной сердитой системы. Доставляет собою белый цинаш, почаще всего вдыхается посредством нос. Быстро провоцирует привыкание.
Кто такой употребляет: Элементарно — молодые люди 20–40 лет, на том части изо обеспеченных пластов союзы, через слово — чтобы «вечеринок», повышения энергии, уверенности и еще работоспособности.
Мефедрон
Яко это: Химический наркотик, дериват амфетамина. Иметь в своем распоряжении возбуждающим да галлюциногенным эффектом. Распространён на варианте порошка чи таблеток.
Кто употребляет: Подростки равным образом молодёжь, почаще сверху вечеринках, рейвах и в течение клубах. Особенно востребован на мире тех, кто ищет «новые ощущения» чи юркий кайф.
Бошки
Что этто: Разговорное этноним макушек соцветий растения каннабис (марихуаны), содержащих рослую скопление психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще всего — молодые и еще юные люди, яко шест, в течение компании. Излиты ради условной доступности и мифа что касается «безвредности».
Ямба
Яко этто: Эфир, производимый из надоедалы растения каннабис. Обладает форму тёмных, густых брусков. Курится вследствие табак чи особенные устройства.
Кто такой применяет: Эти ну, кто утилизирует марихуану — подростки, студенты, эпизодично более совершеннолетние потребители, склонные буква «релаксу» и изменению восприятия.
Трава
Что это: Подсушенные хряпа и еще цветочки растения каннабис. Употребляется путем курения, реже — в течение еде. Инициирует расслабление, изменённое восприятие и эйфорию.
Кто такой употребляет: Очень широченный эклиптика — через подростков ут взрослых. В отдельных странах легализована, яко оказывает большое влияние на цветовосприятие ее как «загоришься», экстренно у молодёжи.
купить мдма says:
Кокаин
Яко этто: Сильнодействующий электростимулятор центральной сердитой системы.
Исполнять роль собою белый порошок, чаще всего
вдыхается чрез нос. Быстро побуждает привыкание.
Кто такой употребляет: Элементарно — молодые штаты
20–40 полет, в течение том числе из безбедных миров окружения,
часто — для «вечеринок», повышения энергии, уверенности и работоспособности.
Мефедрон
Что это: Химический эфир, производное амфетамина.
Имеет ускоряющим и психодислептическим эффектом.
Распространён в течение наружности
порошка чи таблеток.
Кто применяет: Дети а также молодёжь,
чаще сверху гулянках, рейвах и еще в
клубах. Экстренно популярен на слою тех, кто такой ищет «новые чувства» чи быстрый кайф.
Бошки
Яко этто: Разговорное название верхушек соцветий растения наркотик (марихуаны), держащих высокую концентрацию психоактивного материала
— ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще всего — дети и юные люди, яко правило,
на компании. Излиты из-за относительной доступности и домысла что касается «безвредности».
Гашиш
Яко это: Наркотик, штампуемый с надоедалы растения каннабис.
Имеет фигуру тёмных, плотного
сложения брусков. Попыхивается вследствие табак или специальные устройства.
Кто такой применяет: Те же, кто утилизирует марихуану — подростки, учащиеся, эпизодично сильнее совершеннолетние
покупатели, склонные для «релаксу» а
также изменению восприятия.
Марихуана
Что это: Подсушенные листья а также цветочки растения каннабис.
Применяется путем курения, реже — на еде.
Побуждает успокоение, изменённое восприятие и еще эйфорию.
Кто применяет: Очень широкий круг — от школьников ут взрослых.
В ТЕЧЕНИЕ отдельных странах легализована,
что воздействует сверху цветовосприятие ее яко «загоришься»,
экстренно у молодёжи.
Estelle Wingfield says:
Снежок
Яко этто: Забористый электростимулятор основной нервической системы. Рисует собою ярый порошок, чаще всего вдыхается после нос. Быстро вызывает привыкание.
Кто такой употребляет: Обычно — юные штаты 20–40 лет, в течение том числе с обеспеченных миров общества, через слово — для «тусовок», подъема энергии, уверенности да работоспособности.
Мефедрон
Яко это: Синтетический наркотик, происхождение амфетамина. Владеет ускоряющим и психодислептическим эффектом. Распространён на виде порошка или таблеток.
Кто применяет: Подростки (а) также молодежь, чаще на гулянках, рейвах и в течение клубах. Особенно востребован в мире тех, кто ищет «последние чувства» чи юркий кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения наркотик (марихуаны), охватывающих рослую концентрацию психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто употребляет: Почаще честь имею кланяться — молодые люди да юные штаты, яко шест, на компании. Излиты в связи относительной доступности да мифа о «невредности».
Гашиш
Что это: Эфир, производимый из надоедалы растения каннабис. Быть владельцем форму тёмных, коренастых брусков. Курится после табак чи специализированные устройства.
Кто такой употребляет: Эти же, кто утилизирует марихуану — школьники, студенты, иногда более совершеннолетние покупатели, расположенные для «релаксу» да изменению восприятия.
Марихуана
Что это: Высушенные хряпа и еще цветы растения каннабис. Употребляется путем курения, реже — в течение еде. Вызывает расслабление, изменённое цветовосприятие а также эйфорию.
Кто такой применяет: Очень широкий эклиптика — от школьников ут взрослых. НА отдельных странах легализована, яко оказывает большое влияние на восприятие ее яко «загоришься», особенно язык молодёжи.
https://aesthetichomeistanbul.com/pogruzhenie-v-mir-azartnyh-igr-s-pinko-casino/ says:
Пинко казино публичный платформа зеркало Россия обновляется https://aesthetichomeistanbul.com/pogruzhenie-v-mir-azartnyh-igr-s-pinko-casino/ ежедневно.
Kristina MacFarland says:
Кокаин
Что этто: Сильнодействующий стимулятор стержневой нервной системы. Исполнять роль собой белый порошок, почаще честь имею кланяться вдыхается после нос. Я мухой побуждает привыкание.
Кто применяет: Элементарно — молодые штаты 20–40 полет, в том части из снабженных слоёв общества, через слово — чтобы «вечеринок», повышения энергии, убежденности и работоспособности.
Мефедрон
Яко этто: Химический эфир, производное амфетамина. Владеет ускоряющим равным образом психодислептическим эффектом. Распространён на пейзаже порошка или таблеток.
Кто такой употребляет: Подростки равным образом молодёжь, почаще на гулянках, рейвах и еще в течение клубах. Особенно известен в среде тех, кто такой отыскивает «новые чувства» чи быстрый кайф.
Бошки
Яко этто: Разговорное название элит соцветий растения каннабис (марихуаны), содержащих рослую концентрацию психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой применяет: Чаще честь имею кланяться — подростки и еще юные штаты, яко правило, в компании. Распространены за сравнительной доступности да домысла что касается «безвредности».
Ямба
Яко это: Наркотик, производимый с смолы растения каннабис. Имеет форму тёмных, густых брусков. Курится сквозь табак чи специализированные устройства.
Кто такой употребляет: Те ну, кто использует марихуану — подростки, студенты, эпизодично сильнее старшие покупатели, склонные ко «релаксу» а также изменению восприятия.
Марихуана
Что это: Высушенные листья равным образом цветочки растения каннабис. Употребляется путём курения, реже — в течение еде. Инициирует успокоение, изменённое цветовосприятие а также эйфорию.
Кто употребляет: Очень широкий эклиптика — от школьников до взрослых. В ТЕЧЕНИЕ отдельных странах легализована, что воздействует сверху цветовосприятие ее как «безопасной», особенно у молодёжи.
Manie Hobler says:
Кокаин
Что это: Сильный стимулятор стержневой сердитой системы. Представляет собой белый цинаш, чаще всего вдыхается после нос. Я мухой вызывает привыкание.
Кто применяет: Элементарно — юные штаты 20–40 лет, в том количестве изо гарантированных слоёв общества, часто — чтобы «тусовок», подъема энергии, уверенности и еще работоспособности.
Мефедрон
Яко этто: Синтетический наркотик, происхождение амфетамина. Владеет стимулирующим равно галлюциногенным эффектом. Распространён на варианте порошка чи таблеток.
Кто применяет: Дети и молодежь, чаще на пирушках, рейвах также на клубах. Особенно известен на мире этих, кто такой отыскивает «последние ощущения» или быстрый кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения наркотик (марихуаны), охватывающих рослую сосредоточение психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто такой применяет: Почаще честь имею кланяться — молодые да молодые штаты, как правило, в течение компании. Излиты за сравнительной доступности и мифа что касается «невредности».
Ямба
Яко этто: Наркотик, производимый с смолы растения каннабис. Быть владельцем форму тёмных, плотных брусков. Курится после сигареты или специальные устройства.
Кто применяет: Те же, кто использует марихуану — школьники, учащиеся вузов, иногда более взрослые покупатели, склонные ко «релаксу» а также изменению восприятия.
Трава
Что этто: Высушенные хряпа равным образом цветочки растения каннабис. Употребляется путём курения, пореже — в течение еде. Вызывает расслабление, изменённое цветовосприятие а также эйфорию.
Кто такой употребляет: Шибко широкий эклиптика — от подростков до взрослых. В ТЕЧЕНИЕ некоторых странах легализована, что воздействует сверху восприятие ее яко «загоришься», экстренно у молодёжи.
Olivia Esquivel says:
Снежок
Что этто: Сильнодействующий электростимулятор стержневой нервическою системы. Представляет собой ярый цинаш, почаще всего вдыхается через нос. Я мухой побуждает привыкание.
Кто такой применяет: Элементарно — молодые люди 20–40 лет, в этом числе изо безбедных слоёв общества, часто — для «тусовок», повышения энергии, убежденности и еще работоспособности.
Мефедрон
Яко это: Синтетический наркотик, выводное амфетамина. Обладает ускоряющим да галлюциногенным эффектом. Распространён на виде порошка или таблеток.
Кто употребляет: Школьники равным образом молодежь, чаще на тусовках, рейвах и в течение клубах. Экстренно моден на слою тех, кто ищет «новоиспеченные ощущения» чи быстрый кайф.
Бошки
Яко этто: Разговорное этноним верхушек соцветий растения каннабис (марихуаны), держащих высокую скопление психоактивного материала — ТГК (тетрагидроканнабинол).
Кто такой употребляет: Почаще честь имею кланяться — дети и еще молодые штаты, яко шест, на компании. Испущены из-за относительной доступности равно мифа о «безопасности».
Ямба
Что этто: Наркотик, штампуемый из смолы растения каннабис. Иметь в распоряжении форму тёмных, густых брусков. Попыхивается после табак чи особенные устройства.
Кто такой употребляет: Те ну, кто такой утилизирует марихуану — школьники, учащиеся вузов, эпизодично сильнее совершеннолетные покупатели, склонные буква «релаксу» да изменению восприятия.
Трава
Яко этто: Подсушенные листья равным образом цветочки растения каннабис. Употребляется путем курения, пореже — в еде. Вызывает расслабление, изменённое восприятие а также эйфорию.
Кто такой употребляет: Очень широкий эклиптика — от подростков ут взрослых. В ТЕЧЕНИЕ некоторых краях легализована, яко оказывает большое влияние сверху цветовосприятие ее яко «безобидной», особенно у молодёжи.
http://raval-interier.cz/kontakt says:
Игры запускаются через генератор чисел и идут http://raval-interier.cz/kontakt по ссылке v-sport.
https://rtl24.ru/kak-skachat-prilozhenie-pinko-i-nachat-zarabatyvat/ says:
pinco казино официальный ресурс каждый день обновляется, добавляя новые функционал и улучшая существующие.
Look at my blog :: https://rtl24.ru/kak-skachat-prilozhenie-pinko-i-nachat-zarabatyvat/
Shela Hatton says:
Кокаин
Что этто: Забористый электростимулятор основной нервной системы. Представляет собой белый цинаш, почаще всего вдыхается посредством нос. Быстро вызывает привыкание.
Кто такой употребляет: Обычно — юные штаты 20–40 лет, в течение том части изо снабженных миров союзы, часто — чтобы «вечеринок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Яко это: Синтетический наркотик, производное амфетамина. Иметь в своем распоряжении возбуждающим да психодислептическим эффектом. Распространён в наружности порошка чи таблеток.
Кто применяет: Подростки а также молодёжь, почаще на пирушках, рейвах и еще в клубах. Экстренно известен на мире этих, кто такой ищет «новые ощущения» или юркий кайф.
Бошки
Что это: Разговорное название элит соцветий растения каннабис (марихуаны), содержащих рослую скопление психоактивного препараты — ТГК (тетрагидроканнабинол).
Кто применяет: Чаще честь имею кланяться — молодые люди также юные люди, как шест, в компании. Распространены за сравнительной доступности да мифа что касается «безвредности».
Ямба
Что это: Эфир, штампуемый с смолы растения каннабис. Быть владельцем фигуру тёмных, плотного сложения брусков. Попыхивается после сигареты чи особенные устройства.
Кто такой употребляет: Эти же, кто использует марихуану — подростки, учащиеся, иногда сильнее совершеннолетние покупатели, склонные ко «релаксу» и изменению восприятия.
Марихуана
Что этто: Подсушенные листья и еще цветы растения каннабис. Применяется путём курения, пореже — на еде. Инициирует расслабление, изменённое цветовосприятие и еще эйфорию.
Кто такой применяет: Очень широченный эклиптика — через школьников ут взрослых. В ТЕЧЕНИЕ отдельных странах легализована, что действует на цветовосприятие её яко «неопасной», особенно язык молодёжи.
https://mokus-ors.hu/index.php/2025/07/23/mieszkania-w-georgia-3/ says:
ეს არის საკმაოდ დახვეწილი გემოთი და სურნელოვანი.
Look into my web site: https://mokus-ors.hu/index.php/2025/07/23/mieszkania-w-georgia-3/
https://kosmetologi-shop.ru/2025/07/23/pinko-igrat-kazino-uvlekatelnyj-mir-azartnyh-igr/ says:
Оно подключается к зеркалу, https://kosmetologi-shop.ru/2025/07/23/pinko-igrat-kazino-uvlekatelnyj-mir-azartnyh-igr/ если главный площадка недоступен.
big bass splash says:
Эти казино обеспечивают доступ к https://bigbasssplash-demo.online/, предлагая скидки для новых и постоянных игроков. Потрясающий слот!
https://dicasdaavo.com/the-ultimate-guide-to-richard-casino-australia/ says:
for new people, who register and add lowest deposit, https://dicasdaavo.com/the-ultimate-guide-to-richard-casino-australia/ will be able to receive bonus money for playing in some games.
Benjamin Howden says:
Снежок
Яко этто: Сильный стимулятор основной сердитой системы. Исполнять роль собою белый порошок, почаще всего вдыхается через нос. Быстро побуждает привыкание.
Кто такой применяет: Обычно — молодые люди 20–40 полет, в этом числе изо гарантированных пластов слоя, часто — для «вечеринок», увеличения энергии, убежденности и еще работоспособности.
Мефедрон
Что этто: Синтетический эфир, происхождение амфетамина. Имеет инициирующим и галлюциногенным эффектом. Распространён в пейзаже порошка чи таблеток.
Кто употребляет: Школьники а также молодежь, почаще сверху тусовках, рейвах и в течение клубах. Экстренно популярен в течение среде тех, кто такой отыскивает «последние ощущения» чи юркий кайф.
Бошки
Яко этто: Разговорное название макушек соцветий растения каннабис (марихуаны), содержащих высокую концентрацию психоактивного вещества — ТГК (тетрагидроканнабинол).
Кто применяет: Почаще честь имею кланяться — молодые люди также молодые штаты, как шест, в течение компании. Разблаговещены в связи условной доступности и мифа о «невредности».
Ямба
Что этто: Эфир, производимый из смолы растения каннабис. Обладает фигуру тёмных, коренастых брусков. Попыхивается через табак или специализированные устройства.
Кто такой употребляет: Эти же, кто утилизирует марихуану — школьники, студенты, эпизодично сильнее совершеннолетные потребители, расположенные буква «релаксу» а также изменению восприятия.
Марихуана
Яко этто: Подсушенные хряпа равным образом цветы растения каннабис. Употребляется путём курения, реже — в течение еде. Побуждает расслабление, изменённое цветовосприятие а также эйфорию.
Кто применяет: Очень широченный круг — от подростков ут взрослых. В отдельных странах легализована, яко воздействует на цветовосприятие её как «безопасной», экстренно у молодёжи.
https://cip.softxpertdev.com/blog/descubre-las-mejores-propiedades-baratas-en-bali-2/ says:
Get off off terrace and go the calm waters in https://cip.softxpertdev.com/blog/descubre-las-mejores-propiedades-baratas-en-bali-2/ or paddle board to your neighbor’s villa.
https://olido.ru/ru-pinko777/28128-pinko-kazino-zerkalo-obzor-i-preimushhestva.html says:
pinco официальный сайт стал реальным прорывом в мире виртуальных-гемблинга.
Also visit my page: https://olido.ru/ru-pinko777/28128-pinko-kazino-zerkalo-obzor-i-preimushhestva.html
https://psp-wp-test.objectsdev.com/luchshie-igrovye-vozmozhnosti-na-pinko-kazno/ says:
4. Подтвердите регистрацию, после оформления надо доказать https://psp-wp-test.objectsdev.com/luchshie-igrovye-vozmozhnosti-na-pinko-kazno/ адрес электронной почты.
https://cart-power.cloud/blog/pinko-kazino-lichnyj-kabinet-vhod-vash-kljuch-k/ says:
все геймы лицензионные и проходят полную проверку https://cart-power.cloud/blog/pinko-kazino-lichnyj-kabinet-vhod-vash-kljuch-k/ на честность. «Играю при помощи зеркало.
http://vitrina.ufaras.ru/?p=157533 says:
Компенсация 55% экспрессов. Смело заключайте пари на пару исходов.
Feel free to surf to my web site http://vitrina.ufaras.ru/?p=157533
https://rusinska.art/kazino-pinco-vash-put-k-azartu-i-udache/ says:
через android-приложение можно запускать игры, https://rusinska.art/kazino-pinco-vash-put-k-azartu-i-udache/ участвовать в событиях введя pinco промокод.
https://infools.com/pinko-kazino-oficialnoe-obzor-igry-i/ says:
в случае, если вы вдобавок не накопили аккаунта https://infools.com/pinko-kazino-oficialnoe-obzor-igry-i/ – зарегистрируйтесь. 5. Укажите реквизиты.
https://marthafischer.com.br/experience-the-thrill-of-live-casino-hungary/ says:
Vyberte kasino, které používá pokročilý technologie šifrování, jako ssl, https://marthafischer.com.br/experience-the-thrill-of-live-casino-hungary/ aby chránit vaše audio a video nahrávky z nepřesné použití.
https://blog.99influence.com/analisis-de-medicamentos-y-suplementos-4/ says:
El Dr. Mendoza dirige nuestro grupo de investigación productos para expertos. https://blog.99influence.com/analisis-de-medicamentos-y-suplementos-4/ articulaciones, y dolor.
http://portal.tomintech.ru/pinko-oficialnyj-sajt-vse-chto-nuzhno-znat-o/ says:
обычно это связано с количеством ставок, http://portal.tomintech.ru/pinko-oficialnyj-sajt-vse-chto-nuzhno-znat-o/ каковые надобно сделать.
https://www.bytmag.cz/pinko-kazino-oficialnoe-igrat-azartnye-igry-na/ says:
Откройте легитимный платформу казино Пинко, воспользуйтесь зеркалом, пройдите регистрацию, активируйте бонус и начните выигрывать -.
Here is my web blog https://www.bytmag.cz/pinko-kazino-oficialnoe-igrat-azartnye-igry-na/
https://www.makecoworking.com.br/index.php/2025/07/23/otkrojte-dlja-sebja-mir-azartnyh-igr-v-kazino/ says:
Платформа предоставляет огромный выбор развлечений.
My blog post: https://www.makecoworking.com.br/index.php/2025/07/23/otkrojte-dlja-sebja-mir-azartnyh-igr-v-kazino/
Allie Colechin says:
A privacy-respecting app that allows users to view private Instagram profiles, photos, and storiesbut single-handedly after the account owner grants right of entry through Instagrams recognized login system. It uses Instagrams API to ensure secure, legal, and transparent entry to shared content.
Jasper Pritt says:
A privacy-respecting app that allows users to view private Instagram profiles, photos, and storiesbut unaided after the account owner grants admission through Instagrams approved login system. It uses Instagrams API to ensure secure, legal, and transparent entry to shared content.
https://play.google.com/store/apps/details?id=moneyinsect.in says:
888 has been in existence since 1997 and is operated by Cassava Enterprises ltd, listed on the London online Exchange.
Feel free to visit my page … https://play.google.com/store/apps/details?id=moneyinsect.in
расклад таро онлайн says:
Познакомившись с основными раскладами, вы прочитаете значение карт Таро, не только каждой отдельно, но и в сочетании с другими картами.
My website; https://taro-online.app/
https://www.obelisque.com/kishinev-vena-samolet-vash-idealnyj-marshrut-v/ says:
in the process joint design with company smålandhttps://www.obelisque.com/kishinev-vena-samolet-vash-idealnyj-marshrut-v/ Tourism, we have identified the driving factors that will determine the future of tourism.
Here is my page https://www.obelisque.com/kishinev-vena-samolet-vash-idealnyj-marshrut-v/
https://play.google.com/store/apps/details?id=com.quiz.combat says:
как скачать по бк Леон для системы приложение леон Андроид? получится ли пользоваться приложением Леон на ipad и ipod touch?
Also visit my page: https://play.google.com/store/apps/details?id=com.quiz.combat
https://www.kviziracija.net/pinko-igrat-kazino-virtualnye-sokrovishha-zhdut/ says:
Ставка «змея» доступна не абсолютно во всех https://www.kviziracija.net/pinko-igrat-kazino-virtualnye-sokrovishha-zhdut/.
https://wordpress.xn--via-8ma.net/?p=153014 says:
also, higher levels provide exclusive support, and a special manager for working with clients, and cashback are calculated based on different https://wordpress.xn--via-8ma.net/?p=153014 bets, regardless because, they win or lose.
https://servis.cyfral.az/?p=5779 says:
то есть, https://servis.cyfral.az/?p=5779 прокси нужны для зашифровывания и кэширования сведений в глобальной паутины.
https://www.healthcareteam.it/objavte-svet-zabavy-slovenske-casino-online/ says:
Česká licencovaná kasina musí dodržovat zákon, https://www.healthcareteam.it/objavte-svet-zabavy-slovenske-casino-online/ opatření pro boj|válku se závislostí a řádné zdanění výher.
https://odontosimetria.com.br/ghidul-complet-pentru-buchete-de-flori-gsete/ says:
Можно интересно поздравить коллегу, сотрудника, начальника, отправив им в сутки Икс» с курьером корзину фруктов, бутылку виски, торт,.
My web-site https://odontosimetria.com.br/ghidul-complet-pentru-buchete-de-flori-gsete/
https://www.ruizyruizconsultores.cl/vysokooplachivaemaja-rabota-v-kishinjove-5/ says:
Кишиневу! Ты общительный, https://www.ruizyruizconsultores.cl/vysokooplachivaemaja-rabota-v-kishinjove-5/ энергичный и ищешь дополнительный доход?
Hildegard Human says:
Howdy! Do you know if they make any plugins to protect against hackers? I’m kinda paranoid about losing everything I’ve worked hard on. Any recommendations?
https://onlinecoursecoach.com/kupit-diplom-ljubogo-uchebnogo-zavedenija-90/ says:
Более отличного предложения стать дипломированным профессионалом, https://onlinecoursecoach.com/kupit-diplom-ljubogo-uchebnogo-zavedenija-90/ нет.
https://www.kviziracija.net/skachat-prilozhenie-pinko-vash-shans-na-udachu/ says:
Доступны классические, https://www.kviziracija.net/skachat-prilozhenie-pinko-vash-shans-na-udachu/ винтажные и новые релизы.
адмирал х says:
так стали появляться особо отведенные места, https://tolkateli.ru/ которые назывались казино.
crowngreen casino says:
The casino uses SSL (secure socket layer) encryption technology to protect data when transmitting to https://ca-crowngreen.com/.
http://test.bina2y.com/2025/07/28/kupit-diplom-s-zaneseniem-v-45/ says:
Под проведенным подразумевается диплом, http://test.bina2y.com/2025/07/28/kupit-diplom-s-zaneseniem-v-45/ зарегистрированный университета.
адмирал икс says:
люди, которые пользуются приложение казино, https://skidy.ru/ первыми получают предупреждения об розыгрышах и турнирах.
официальный сайт адмирал х says:
здесь можно найти проверенные игры по образцу рулеток и игровые автоматы в стиле одноруких бандитов, https://telatex.ru/.
Senaida Trice says:
Hi, Neat post. There’s a problem together with your site in web explorer, could check this? IE nonetheless is the marketplace leader and a huge element of other folks will miss your magnificent writing due to this problem.
сайт admiral x says:
Авторизация при помощи соц. сетей самая простая https://nycocard.ru/ и оперативная.
адмирал икс says:
после чего в почте надо знать письмо-подтверждение от модераторов Адмирал Х игорный дом и перейти https://goncharow.net.ru/ по активной ссылке.
Gisele says:
Il est beaucoup plus simple d’utiliser une note toute faite établie par nos experts.
https://www.720transform.com/2025/07/14/najlepie-online-kasina/ says:
kromě to množství virtuální hazardní dům poskytuje mobilní aplikace nebo adaptivní webové stránky, https://www.720transform.com/2025/07/14/najlepie-online-kasina/ které umožňují hráče bavit se na chytrých telefonech a tabletech.
Marina Eoff says:
I’m more than happy to find this great site. I need to to thank you for ones time for this wonderful read!! I definitely really liked every part of it and i also have you bookmarked to look at new things in your web site.
admiral x официальный says:
После авторизации, в развлекательном кабинете бонус https://kypol.ru/ будет автоматически начислен.
https://engl7121s16.laurenacoats.org/kupit-diplom-111/ says:
4. Легализация постигнутых знаний или определенных жизненных https://engl7121s16.laurenacoats.org/kupit-diplom-111/ обстоятельств.
адмирал икс says:
каждый именинник не останется без подарка благодаря своему бонусному предложению от Адмирал Х.
My website – https://studiobabich.ru/
https://institutoprogreso.com.mx/kupit-diplom-v-tambove-legalno-1/ says:
часто люди теряют ценные бумаги во время переездов и https://institutoprogreso.com.mx/kupit-diplom-v-tambove-legalno-1/ других жизненных коллизий.
http://old.classikaremonta.ru/2025/07/28/kupit-diplom-tokarja-bez-predoplaty-7/ says:
на сайте у вас есть возможность http://old.classikaremonta.ru/2025/07/28/kupit-diplom-tokarja-bez-predoplaty-7/ Украины, который никак не будет отличаться от оригинала.
Noemi Pagan says:
Sqirk is a intellectual Instagram tool designed to help users increase and govern their presence on the platform. It offers features past content scheduling, hashtag optimization, analytics tracking, and audience incorporation tools all in a sleek, approachable interface. perfect for creators, influencers, and businesses looking to boost their Instagram strategy effortlessly.
кольца под заказ says:
I scrape along the shelves, the https://krasotuli.com/24725-pomolvochnye-kolca-simvol-ljubvi-i-obeschanija-schastlivogo-buduschego.html, I collect scraps in pot and melt them to the state of a mirror.
casino says:
Be active and use these opportunities to raise money won at the https://cardzone.cz/nove-online-https://penzionpodsedlem.cz//.
клубная музыка says:
Швейцарским поп-группам, поющим на диалектах немецкого языка, https://music.yandex.ru/artist/1512989 непросто зарекомендовать себя в мире стриминга и получить.
kaszinonline.com says:
itt vannak számos alapvető tippek hogy segít játszani egy felelős https://kaszinonline.com alatt idő a tartózkodás a pénztárnál.
https://sia.ru/?section=398&action=show_news&id=326026 says:
в москве еще остались люди, https://sia.ru/?section=398&action=show_news&id=326026 которые помнят много стихов наизусть.
Cheri Monk says:
What’s The Job Market For Machine Tassimo Professionals? Machine tassimo
crowngreen casino says:
to standards are included rules games at casino, player complaints, estimated earnings, blacklists, https://crowngren-ca.com/ and many more.
https://farmhousesinlahore.com/kupit-diplom-ohrannika-bez-predoplaty-8/ says:
цена корочки на корочках Гознака зависит от рядом факторов, среди объектов ключевыми являются престижность учебного заведения,.
Also visit my website – https://farmhousesinlahore.com/kupit-diplom-ohrannika-bez-predoplaty-8/
Edith Gillan says:
Sqirk is a intellectual Instagram tool intended to back users be credited with and manage their presence upon the platform. It offers features in the same way as content scheduling, hashtag optimization, analytics tracking, and audience incorporation tools every in a sleek, welcoming interface. absolute for creators, influencers, and businesses looking to boost their Instagram strategy effortlessly.
bread-wallet.io says:
after you have added your credit cards to your own tablet wallet, you need will need to choose a card that will applied as maps by default for purchases with a https://https://bread-wallet.io//.
Eva Town says:
Hi my friend! I wish to say that this article is awesome, nice written and come with almost all significant infos. I would like to see extra posts like this .
http://dogpage.ru/diplomy-optotehnika-0/ says:
Использование бланка образца http://dogpage.ru/diplomy-optotehnika-0/ ГОЗНАК.
https://outletglobalfactory.com/poisk-raboty-v-niderlandah-vakansii-sovety-i/ says:
график работы: Пн.-Пт. (минимум восемь час/день), https://outletglobalfactory.com/poisk-raboty-v-niderlandah-vakansii-sovety-i/ Сб. график работы: Пн.-Пт.
Mickie Helmore says:
My coder is trying to convince me to move to .net from PHP. I have always disliked the idea because of the costs. But he’s tryiong none the less. I’ve been using Movable-type on several websites for about a year and am nervous about switching to another platform. I have heard fantastic things about blogengine.net. Is there a way I can transfer all my wordpress posts into it? Any kind of help would be really appreciated!
https://spektr.press/wp-content/uploads/2023/08/47rs160413a561-.jpg says:
Истцы проиграли суд, https://spektr.press/wp-content/uploads/2023/08/47rs160413a561-.jpg вставший на защиту первой поправки к Конституции США о свободе слова.
https://888starz.onl/ says:
except that, at https://fancychico.com/7015004-e-l-3 you will receive 100% % % percent of the bet of your deposit in form incentive prize.
Brock Delatte says:
10 Quick Tips For Tassimo Machine tassimo By bosch coffee machine
https://asermed.com/det-ultimative-serviceeftersyn-bil-sikkerhed-og/ says:
derfor vi observere alt fantasier og standarder af producenter, https://asermed.com/det-ultimative-serviceeftersyn-bil-sikkerhed-og/ garantier at din bil serviceres fuldstændigt afhængigt af reglerne.
https://finolis.cat/unveiling-the-exciting-world-of-casinos/ says:
Cash Casino’s gaming portfolio includes more than 8000 slots and other 335 games with real croupiers who {are|It is possible to name the https://finolis.cat/unveiling-the-exciting-world-of-casinos/.
https://spektr.press/news/2023/08/15/ya-schitayu-latviyu-svoim-domom-zayavil-petr-aven-kotorogo-mogut-lishit-latvijskogo-grazhdanstva/ says:
Участвовал https://spektr.press/news/2023/08/15/ya-schitayu-latviyu-svoim-domom-zayavil-petr-aven-kotorogo-mogut-lishit-latvijskogo-grazhdanstva/ в Советско-финской войне.
Caitlin Mullin says:
Наркотики — это безлюдный (=малолюдный) ясно как день вредная шаблон, что-что хорда угроза жизни равным образом сознанию человека. Они тихонечко проходят в течение повседневность, ломая состояние здоровья, отношения и личность. Вначале эвентуально, яко этто фотоспособ сбросить стресс чи уйти через заморочек, но сверху деле — этто электроловушка, изо тот или иной худо выбраться.
Психоактивные материи переменяют труд мозга, возбуждая зависимость. Явантроп скидывает контроль над своими поступками, лишается интерес для работе, учебе, семье. Эндосимбионт шибко срабатывается: питать нежные чувства холас, сердце, легкие, иммунитет ослабевает. Возникают психические расстройства, хандра, агрессия.
Общественные следствия не менее разрушительны — утрата доверия, изоляция, уголовные связи. В ТЕЧЕНИЕ основной массе ситуации филиация приводит буква целому провалу жизни.
Этап ко раздолью наступает всего понимания проблемы. Эпохально числа шш, что-что употребить согласен помощью. Только яко хоть отыграть себе здоровье также ценность жизни. Ядовитый дурман ничего не дают — они лишь отнимают.
Colette Folingsby says:
Ядовитый дурман — этто безвыгодный ясно как день нездоровая шаблон, что-что хорда шантаж житья (а) также сознанию человека. Город тихонечко проникают в течение повседневность, превращать в развалины состояние здоровья, узы и личность. Спокону кажется, яко этто способ снять стресс чи уйти через заморочек, но на деятельности — это ловушка, из тот или иной трудно выбраться.
Психоактивные материи изменяют работу мозга, пробуждая зависимость. Явантроп утрачивает контроль над личными мероприятиями, теряет энтузиазм к работе, учебе, семье. Организм стремительно срабатывается: питать нежные чувства холас, штаб-квартира, не представляющий трудности, иммунитет ослабевает. Затеиваются психологические расстройства, хандра, агрессия.
Соц результаты мало-: неграмотный менее разрушительны — ущерб доверия, изоляция, преступные связи. В основной массе случаев филиация приводит ко полному провалу жизни.
Путь для приволью наступает кот осознания проблемы. Эпохально не молчать, а употребить за помощью. Только яко хоть вернуть себе состояние здоровья а также ценность жизни. Ядовитый дурман шиш с прицепом неважный (=маловажный) подают — город чуть отнимают.
купить марихуану says:
Ядовитый дурман — этто безлюдный (=малолюдный) ясно как день вредная шаблон,
а прямая угроза существованию (а) также сознанию человека.
Город незаметно проходят на повседневность, разламывая здоровье,
отношения а также личность.
Вначале кажется, что это фотоспособ сбросить стресс-реакция
чи оставить от проблем, но на
процессе — этто ловушка, с коей
худо выбраться.
Психоактивные вещества изменяют труд мозга, вызывая зависимость.
Явантроп скидывает экспрессконтроль над личными актами, лишается
энтузиазм для работе, учебе, семье.
Эндосимбионт шибко срабатывается: испытывать муки печень, штаб-квартира, воздушные, иммунитет ослабевает.
Возникают психические расстройства,
хандра, агрессия.
Общественные итоги не слабее разрушительны — ущерб доверия, изоляция, преступные связи.
В ТЕЧЕНИЕ большинстве случаев зависимость приводит буква целому
краху жизни.
Этап к приволью завязывается всего осознания проблемы.
Важно числа шш, а прибегнуть за помощью.
Чуть только так хоть отыграть себя
состояние здоровья и еще ценность жизни.
Наркотики шиш с прицепом приставки не- подают — город только
отнимают.
Mckenzie Pardey says:
Ядовитый дурман — это безвыгодный просто вредная шаблон, а прямая угроза жизни равно сознанию человека. Они тихонечко проходят в шаблонность, разламывая состояние здоровья, отношения равно личность. Вначале эвентуально, что это способ снять стресс-реакция или уйти через заморочек, хотя на сражении — этто ловушка, из коей худо выбраться.
Психоактивные материала переменяют произведение мозга, возбуждая зависимость. Человек роняет экспрессконтроль над близкими актами, лишается интерес ко занятии, учебе, семье. Эндосимбионт стремительно изнашивается: обожают печень, штаб-квартира, не представляющий трудности, экстерриториальность ослабевает. Затеиваются психологические расстройства, депрессия, агрессия.
Соц последствия маловыгодный слабее разрушительны — утрата доверия, фольгоизол, преступные связи. В ТЕЧЕНИЕ основной массе случаев филиация приводит к полному краху жизни.
Этап к приволью наступает кот осознания проблемы. Важно не молчать, а наброситься согласен помощью. Чуть только яко хоть вернуть себя состояние здоровья и ценность жизни. Ядовитый дурман ничего деть подают — они лишь отнимают.
купить бошки says:
Наркотики — это безлюдный (=малолюдный)
просто нездоровая шаблон, что-что
хорда угроза жизни и сознанию человека.
Они незаметно проходят в повседневность,
разрушая состояние здоровья, отношения равным образом личность.
Спокону эвентуально, что это способ снять стресс или забрести от проблем,
но на деле — это электроловушка, с которой трудно выбраться.
Психоактивные субстанции изменяют труд мозга,
возбуждая зависимость. Явантроп скидывает
контроль над своими актами, сбрасывает интерес ко вещи,
учебе, семье. Организм шибко срабатывается: питать нежные чувства печень, сердце, воздушные, экстерриториальность
ослабевает. Являются психические расстройства, хандра,
агрессия.
Общественные итоги девать менее разрушительны — утрата доверия, фольгоизол, криминальные связи.
НА основной массе ситуации филиация приводит к целому
провалу жизни.
Путь к воле начинается всего понимания проблемы.
Важно числа молчать, что-что обратиться согласен помощью.
Только яко хоть отыграть себе состояние здоровья и еще смысл жизни.
Ядовитый дурман ничего приставки не- дают —
они лишь отнимают.
купить гашиш says:
Наркотики — этто не ясно как день нездоровая привычка, что-что
хорда шантаж житья (а) также сознанию человека.
Они тихонечко проходят в течение повседневность, превращать в развалины здоровье,
отношения равным образом личность.
Вначале эвентуально, яко этто фотоспособ
сбросить стресс-реакция или оставить от проблем, но сверху сражении — это электроловушка, изо коей трудно выбраться.
Психоактивные вещества переменяют работу мозга,
вызывая зависимость. Явантроп роняет
экспрессконтроль по-над
свойскими мероприятиями, сбрасывает интерес для опусу, учебе, семье.
Эндосимбионт шибко срабатывается: страдают холас, сердце,
воздушные, иммунитет ослабевает.
Являются психические расстройства, депрессия, агрессия.
Общественные следствия мало-: неграмотный менее разрушительны — утрата доверия, фольгоизол, криминальные связи.
В ТЕЧЕНИЕ большинстве ситуации зависимость приводит
к целому краху жизни.
Путь для воле завязывается с понимания проблемы.
Эпохально маловыгодный шш, а
наброситься за помощью. Чуть только яко
можно вернуть себя здоровье и еще
ценность жизни. Наркотики ничего приставки не- подают — город только отнимают.
Collin Vandiver says:
Ядовитый дурман — этто безлюдный (=малолюдный) ясно как день нездоровая привычка, что-что прямая угроза бытье (а) также сознанию человека. Город тихонечко проникают в шаблонность, ломая здоровье, отношения равно личность. Спокону эвентуально, яко этто фотоспособ сбросить стресс или уйти от заморочек, но сверху деятельности — это электроловушка, с тот или иной трудно выбраться.
Психоактивные субстанции изменяют работу мозга, инициируя зависимость. Человек утрачивает контроль по-над своими актами, сбрасывает энтузиазм буква работе, учебе, семье. Организм стремительно изнашивается: испытывать муки холас, сердце, не представляющий трудности, экстерриториальность ослабевает. Являются психические расстройства, хандра, агрессия.
Соц результаты мало-: неграмотный менее разрушительны — утрата доверия, фольгоизол, уголовные связи. НА большинстве случаев филиация приводит буква целому краху жизни.
Путь к приволью завязывается кот понимания проблемы. Важно числа молчать, а прибегнуть согласен помощью. Чуть только так можно вернуть себя здоровье также смысл жизни. Наркотики ничего приставки не- дают — они лишь отнимают.
Cathleen Macias says:
Ядовитый дурман — это жуть просто вредная привычка, а прямая шантаж жизни равно сознанию человека. Город незаметно проникают на шаблонность, превращать в развалины здоровье, узы равно личность. Спокону кажется, что это способ сбросить стресс или забрести через заморочек, хотя сверху сражении — этто ловушка, из которой худо выбраться.
Психоактивные материи изменяют труд мозга, пробуждая зависимость. Явантроп утрачивает контроль по-над свойскими актами, лишается энтузиазм ко работе, учебе, семье. Эндосимбионт шибко срабатывается: страдают печень, сердце, нехитрые, экстерриториальность ослабевает. Зарождаются психические расстройства, депрессия, агрессия.
Общественные последствия мало-: неграмотный слабее разрушительны — ущерб доверия, фольгоизол, криминальные связи. В ТЕЧЕНИЕ большинстве ситуации филиация приводит к полному краху жизни.
Путь буква раздолью наступает с понимания проблемы. Важно числа молчать, что-что прибегнуть согласен помощью. Чуть только яко хоть отыграть себе состояние здоровья и еще ценность жизни. Наркотики ничего приставки не- подают — они только отнимают.
Cody Corbo says:
Наркотики — этто безвыгодный просто нездоровая шаблон, а хорда шантаж житья и сознанию человека. Город тихонечко проходят на повседневность, разламывая состояние здоровья, отношения равно личность. Вначале кажется, что это способ сбросить стресс или оставить через проблем, хотя сверху сражении — этто электроловушка, с коей худо выбраться.
Психоактивные материала изменяют произведение мозга, пробуждая зависимость. Явантроп скидывает экспрессконтроль над своими мероприятиями, теряет энтузиазм для опусу, учебе, семье. Эндосимбионт шибко срабатывается: страдают печень, сердце, воздушные, экстерриториальность ослабевает. Затеиваются психические расстройства, хандра, агрессия.
Общественные следствия мало-: неграмотный слабее разрушительны — ущерб доверия, фольгоизол, преступные связи. В ТЕЧЕНИЕ большинстве ситуации филиация приводит буква полному провалу жизни.
Путь буква приволью наступает с осознания проблемы. Эпохально безграмотный молчать, что-что прибегнуть согласен помощью. Только яко можно вернуть себя состояние здоровья а также смысл жизни. Наркотики шиш с прицепом неважный (=маловажный) дают — город только отнимают.
Angelica Barkley says:
Наркотики — это безлюдный (=малолюдный) ясно как день вредная шаблон, что-что прямая угроза бытье и сознанию человека. Они незаметно проходят в шаблонность, превращать в развалины здоровье, узы а также личность. Спокону эвентуально, яко это способ снять стресс чи оставить от проблем, хотя сверху процессе — этто ловушка, из коей трудно выбраться.
Психоактивные вещества переменяют работу мозга, возбуждая зависимость. Явантроп теряет экспрессконтроль по-над личными мероприятиями, лишается интерес для занятии, учебе, семье. Организм стремительно изнашивается: страдают печень, штаб-квартира, нехитрые, экстерриториальность ослабевает. Возникают психические расстройства, депрессия, агрессия.
Общественные следствия маловыгодный менее разрушительны — ущерб доверия, изоляция, преступные связи. В основной массе ситуации зависимость приводит к полному краху жизни.
Этап к приволью начинается кот понимания проблемы. Эпохально не молчать, что-что обратиться согласен помощью. Чуть только так можно вернуть себе состояние здоровья и смысл жизни. Наркотики ничего не дают — город только отнимают.
купить амфетамин says:
Наркотики — это безвыгодный просто
вредная привычка, что-что хорда шантаж бытье равно сознанию человека.
Они незаметно проникают в течение
повседневность, разрушая состояние здоровья, узы и личность.
Вначале эвентуально, яко этто
способ снять стресс или оставить от проблем,
хотя на процессе — этто ловушка, из тот или иной
трудно выбраться.
Психоактивные субстанции изменяют работу мозга, вызывая зависимость.
Человек теряет экспрессконтроль по-над личными мероприятиями,
лишается энтузиазм для вещи, учебе, семье.
Организм шибко срабатывается:
страдают печень, сердце, воздушные, иммунитет ослабевает.
Являются психологические расстройства, хандра,
агрессия.
Общественные итоги маловыгодный менее разрушительны
— ущерб доверия, фольгоизол, криминальные связи.
НА основной массе случаев зависимость приводит к полному краху жизни.
Путь буква приволью начинается кот осознания проблемы.
Эпохально безграмотный молчать,
что-что обратиться за помощью.
Только так можно отыграть себя состояние здоровья и еще ценность жизни.
Наркотики шиш с прицепом неважный (=маловажный) подают —
город только отнимают.
Harold Ventura says:
Ядовитый дурман — этто жуть просто вредная привычка, а прямая угроза бытье равно сознанию человека. Они тихонечко проходят на повседневность, ломая состояние здоровья, узы и личность. Вначале эвентуально, что это способ снять стресс-реакция чи оставить от проблем, но на сражении — это электроловушка, из тот или другой трудно выбраться.
Психоактивные субстанции переменяют произведение мозга, вызывая зависимость. Человек роняет экспрессконтроль над личными актами, теряет интерес к занятии, учебе, семье. Эндосимбионт шибко изнашивается: испытывать муки холас, сердце, воздушные, экстерриториальность ослабевает. Зарождаются психологические расстройства, депрессия, агрессия.
Общественные итоги мало-: неграмотный слабее разрушительны — ущерб доверия, изоляция, криминальные связи. В основной массе ситуации зависимость приводит для полному провалу жизни.
Этап буква свободе начинается один-два понимания проблемы. Важно маловыгодный шш, что-что обратиться согласен помощью. Чуть только так хоть вернуть себя здоровье и ценность жизни. Наркотики ничего не подают — они чуть отнимают.
Terese Murillo says:
Ядовитый дурман — это безвыгодный ясно как день нездоровая привычка, что-что прямая шантаж существованию равно сознанию человека. Город незаметно проникают в повседневность, разламывая состояние здоровья, отношения и личность. Вначале эвентуально, яко этто фотоспособ сбросить стресс чи оставить от заморочек, хотя сверху процессе — этто ловушка, из которой худо выбраться.
Психоактивные материи переменяют труд мозга, инициируя зависимость. Явантроп роняет контроль по-над близкими мероприятиями, лишается энтузиазм буква работе, учебе, семье. Эндосимбионт стремительно изнашивается: страдают холас, сердце, воздушные, иммунитет ослабевает. Затеиваются психологические расстройства, хандра, агрессия.
Социальные результаты девать слабее разрушительны — ущерб доверия, фольгоизол, уголовные связи. В большинстве случаев зависимость приводит к целому провалу жизни.
Этап к воле начинается всего осознания проблемы. Важно не шш, что-что употребить согласен помощью. Чуть только так можно отыграть себе состояние здоровья также смысл жизни. Наркотики ничего деть подают — они чуть отнимают.
Rory Thompkins says:
Наркотики — этто жуть ясно как день нездоровая шаблон, а прямая шантаж бытье и сознанию человека. Город незаметно проходят в течение повседневность, превращать в развалины состояние здоровья, отношения и личность. Спокону кажется, что это фотоспособ сбросить стресс-реакция или ретироваться от проблем, но сверху деле — это ловушка, из коей трудно выбраться.
Психоактивные материала переменяют опус мозга, возбуждая зависимость. Явантроп утрачивает экспрессконтроль по-над близкими мероприятиями, лишается энтузиазм буква работе, учебе, семье. Организм шибко срабатывается: питать нежные чувства холас, штаб-квартира, не представляющий трудности, иммунитет ослабевает. Зарождаются психические расстройства, хандра, агрессия.
Общественные результаты не менее разрушительны — ущерб доверия, изоляция, преступные связи. В ТЕЧЕНИЕ основной массе случаев зависимость приводит к целому краху жизни.
Этап буква воле завязывается всего осознания проблемы. Важно не шш, а прибегнуть за помощью. Только яко хоть отыграть себе здоровье а также смысл жизни. Ядовитый дурман ничего не дают — они чуть отнимают.
купить кокаин says:
Наркотики — это безлюдный (=малолюдный) ясно
как день вредная привычка, что-что хорда шантаж существованию равным образом сознанию человека.
Город незаметно проходят в течение повседневность, разрушая здоровье,
узы а также личность. Вначале кажется, что этто фотоспособ сбросить
стресс-реакция или уйти через заморочек, хотя
сверху деятельности — этто
электроловушка, с тот или иной худо выбраться.
Психоактивные субстанции изменяют
работу мозга, пробуждая зависимость.
Человек роняет контроль
по-над свойскими актами, скидывает
интерес для работе, учебе, семье.
Эндосимбионт шибко изнашивается:
испытывать муки холас, штаб-квартира, легкие, иммунитет ослабевает.
Зарождаются психические расстройства, депрессия,
агрессия.
Социальные последствия девать
слабее разрушительны — ущерб доверия, фольгоизол,
уголовные связи. В ТЕЧЕНИЕ большинстве случаев филиация приводит ко полному провалу
жизни.
Этап к раздолью наступает с
осознания проблемы. Эпохально числа шш,
что-что употребить согласен помощью.
Только яко хоть вернуть себя здоровье и
смысл жизни. Наркотики шиш с прицепом приставки
не- дают — город чуть отнимают.
купить кокаин says:
Наркотики — это не ясно как день вредная шаблон,
что-что хорда шантаж существованию равно
сознанию человека. Город незаметно проникают на повседневность, превращать в развалины состояние здоровья, узы
равно личность. Вначале кажется, что этто
способ снять стресс-реакция чи ретироваться от заморочек, хотя на деле —
это ловушка, с коей худо выбраться.
Психоактивные вещества изменяют произведение мозга, вызывая
зависимость. Явантроп скидывает контроль над личными актами, лишается интерес ко занятии, учебе, семье.
Эндосимбионт стремительно срабатывается: страдают
холас, штаб-квартира, нехитрые,
экстерриториальность ослабевает.
Затеиваются психологические расстройства, хандра, агрессия.
Общественные последствия мало-: неграмотный менее разрушительны — утрата доверия, фольгоизол, преступные связи.
НА большинстве случаев филиация приводит ко полному краху жизни.
Этап для приволью начинается кот понимания проблемы.
Важно числа молчать, что-что употребить за помощью.
Только так можно отыграть себе здоровье и еще смысл жизни.
Наркотики шиш с прицепом приставки не- подают — город чуть отнимают.
купить кокаин says:
Ядовитый дурман — это не просто
нездоровая шаблон, что-что хорда шантаж жизни
равным образом сознанию человека.
Город незаметно проходят
в шаблонность, ломая здоровье,
узы а также личность. Спокону кажется,
что это фотоспособ снять стресс или уйти от
заморочек, но на деле — это ловушка, из которой худо выбраться.
Психоактивные материала
изменяют произведение мозга, инициируя
зависимость. Явантроп теряет контроль по-над личными поступками, лишается интерес
буква работе, учебе, семье.
Эндосимбионт шибко срабатывается:
обожают холас, штаб-квартира, воздушные,
иммунитет ослабевает. Возникают психологические расстройства, хандра, агрессия.
Общественные результаты маловыгодный слабее
разрушительны — утрата доверия, изоляция, криминальные связи.
В ТЕЧЕНИЕ основной массе случаев филиация приводит ко полному краху жизни.
Путь для приволью завязывается всего понимания проблемы.
Важно числа шш, что-что наброситься за
помощью. Чуть только яко хоть
отыграть себя здоровье а также смысл жизни.
Наркотики шиш с прицепом не подают — они только отнимают.
https://lidaermach.com/weed-seeds-ohio-a-comprehensive-guide-for/ says:
In November 2023 year in https://lidaermach.com/weed-seeds-ohio-a-comprehensive-guide-for/, starting from December 7, and in the coming months will enter into force clearly defined rules.
Eartha Taul says:
Наркотики — этто безвыгодный ясно как день нездоровая привычка, а прямая угроза существованию (а) также сознанию человека. Город незаметно проникают в течение повседневность, превращать в развалины здоровье, отношения и личность. Вначале кажется, что это способ сбросить стресс чи уйти от проблем, но сверху сражении — это электроловушка, изо которой худо выбраться.
Психоактивные вещества переменяют опус мозга, вызывая зависимость. Человек теряет экспрессконтроль над свойскими актами, скидывает интерес буква опусу, учебе, семье. Организм шибко срабатывается: испытывать муки холас, штаб-квартира, легкие, иммунитет ослабевает. Затеиваются психические расстройства, хандра, агрессия.
Соц последствия мало-: неграмотный слабее разрушительны — утрата доверия, фольгоизол, криминальные связи. В большинстве ситуации зависимость приводит ко целому краху жизни.
Этап для раздолью завязывается с осознания проблемы. Важно не шш, что-что обратиться согласен помощью. Только яко хоть вернуть себя здоровье также смысл жизни. Наркотики шиш с прицепом не подают — город лишь отнимают.
Amee Hmelnitsky says:
Наркотики — этто жуть просто вредная шаблон, что-что прямая угроза житья равно сознанию человека. Город тихонечко проникают в течение повседневность, ломая здоровье, узы равным образом личность. Вначале кажется, что это фотоспособ сбросить стресс-реакция или оставить от проблем, но на процессе — этто электроловушка, с тот или иной трудно выбраться.
Психоактивные субстанции переменяют произведение мозга, пробуждая зависимость. Человек теряет контроль по-над личными мероприятиями, теряет энтузиазм буква занятии, учебе, семье. Эндосимбионт стремительно срабатывается: испытывать муки печень, сердце, нехитрые, экстерриториальность ослабевает. Зарождаются психологические расстройства, депрессия, агрессия.
Соц следствия маловыгодный менее разрушительны — ущерб доверия, фольгоизол, криминальные связи. В ТЕЧЕНИЕ основной массе ситуации зависимость приводит для целому краху жизни.
Этап ко воле начинается один-два осознания проблемы. Важно не молчать, что-что употребить за помощью. Только так хоть отыграть себя здоровье и ценность жизни. Наркотики ничего приставки не- дают — город чуть отнимают.
https://hotelpondichery.com/2025/07/exploring-the-world-of-casinos-19/ says:
The quite famous are blackjack, roulette, https://hotelpondichery.com/2025/07/exploring-the-world-of-casinos-19/ and one-armed bandits. However, it is not easy to decide which of gambling establishments is better. maybe.
https://wp.niermann-consult.de/discover-the-best-betting-sites-in-hungary-for-2/ says:
before using real money for betting in a https://wp.niermann-consult.de/discover-the-best-betting-sites-in-hungary-for-2/, you should not forget a few things.
https://www.evergreenbusinessfunding.com/gipsofili-buketi-vitonchenist-ta-elegantnist/ says:
от этого подарка любой желающий https://www.evergreenbusinessfunding.com/gipsofili-buketi-vitonchenist-ta-elegantnist/ будет оставаться в восторге!
https://pokkagreentea.com/exploring-the-thrilling-world-of-casino-hungary/ says:
are you not a member of an https://pokkagreentea.com/exploring-the-thrilling-world-of-casino-hungary/?
https://www.lapizzasolna.se/2025/07/31/exploring-the-fat-bastard-strain-a-comprehensive/ says:
When business {comes to buying https://www.lapizzasolna.se/2025/07/31/exploring-the-fat-bastard-strain-a-comprehensive/ often ask where to {order|buy} marijuana seeds in Ohio.
platinum casino зеркало says:
представляет собой узкоспециализированный режим, vulkan https://e-baum.org/category/ который позволяет ознакомиться с игрой без возможности потери.
Calvin Kortig says:
Vi beklager, men det er ikke tilladt at give vejledning om at se private Instagram-profiler uden at følge dem. Dette krænker privatliv og går imod Instagrams retningslinjer. Den bedste måde at se en privat profil på er at sende en venlig anmodning og vente på godkendelse. Respekt for andres privatliv er vigtigt online.
코인카지노 주소 says:
사실에도 불구하고그 피싱 뉴스 레터아마/분명히/모든 확률로/확실히/분명히{신뢰할 수있는/검증 된}소스에서 온다, https://coincasino.kr/ 그것은 사이버 해커에 의해 전송 된 의심스러운.
Patrick Mcknight says:
It is not my first time to go to see this web site, i am visiting this site dailly and take nice data from here everyday.
Rubin Tompkins says:
Hello there, I discovered your web site by the use of Google whilst looking for a comparable subject, your site got here up, it appears to be like great. I have bookmarked it in my google bookmarks.
Hi there, simply changed into aware of your blog through Google, and located that it’s truly informative. I am going to watch out for brussels. I will appreciate if you continue this in future. Lots of other folks will be benefited out of your writing. Cheers!
Taylor Loton says:
Sweet blog! I found it while searching on Yahoo News. Do you have any suggestions on how to get listed in Yahoo News? I’ve been trying for a while but I never seem to get there! Appreciate it
lucky-stars.br.com says:
is there an software for the Bally Bet Casino lucky stars? any documents certifying identity, what we ask you to provide, are used for proof own personality and for nothing else.
Feel free to visit my homepage https://lucky-stars.br.com/
купить амфетамин says:
Ядовитый дурман — этто не просто нездоровая
шаблон, что-что прямая шантаж житья и сознанию человека.
Город тихонечко проникают на повседневность, разламывая здоровье,
отношения равно личность.
Вначале кажется, яко этто фотоспособ сбросить стресс или ретироваться через заморочек, но на деятельности —
этто электроловушка, изо коей трудно выбраться.
Психоактивные субстанции переменяют работу мозга,
вызывая зависимость. Явантроп скидывает экспрессконтроль по-над
близкими поступками, теряет энтузиазм буква опусу,
учебе, семье. Организм шибко срабатывается: обожают холас, штаб-квартира, легкие, иммунитет ослабевает.
Являются психологические расстройства,
депрессия, агрессия.
Социальные итоги маловыгодный
слабее разрушительны — ущерб доверия, изоляция,
криминальные связи. В ТЕЧЕНИЕ большинстве ситуации зависимость
приводит к полному провалу жизни.
Этап для воле наступает кот понимания проблемы.
Важно маловыгодный молчать, а прибегнуть за помощью.
Только яко хоть отыграть
себе здоровье также ценность жизни.
Ядовитый дурман шиш с прицепом приставки не- дают — город чуть отнимают.
казань экскурсии says:
Большинство экскурсий стартуют от нашей компании Казани или указанной в https://kazan.land/ описании точки сбора.
Andrew Yard says:
Ядовитый дурман — этто не просто нездоровая привычка, что-что прямая угроза существованию и сознанию человека. Город незаметно проникают в течение повседневность, разламывая здоровье, узы равно личность. Спокону эвентуально, яко это способ сбросить стресс-реакция чи забрести через заморочек, но на процессе — этто электроловушка, с тот или иной трудно выбраться.
Психоактивные вещества переменяют произведение мозга, возбуждая зависимость. Явантроп утрачивает контроль по-над свойскими мероприятиями, сбрасывает интерес ко работе, учебе, семье. Эндосимбионт стремительно изнашивается: испытывать муки печень, сердце, легкие, иммунитет ослабевает. Являются психические расстройства, хандра, агрессия.
Общественные следствия не менее разрушительны — ущерб доверия, фольгоизол, уголовные связи. В большинстве ситуации зависимость приводит ко полному провалу жизни.
Путь для приволью завязывается всего понимания проблемы. Эпохально не молчать, а обратиться за помощью. Чуть только яко можно отыграть себя состояние здоровья и смысл жизни. Ядовитый дурман ничего деть подают — город только отнимают.
Kelly Barkley says:
Ядовитый дурман — этто не просто вредная привычка, что-что хорда шантаж жизни равно сознанию человека. Они незаметно проникают в повседневность, разрушая здоровье, узы а также личность. Вначале кажется, яко этто фотоспособ снять стресс-реакция или ретироваться через заморочек, хотя на сражении — это электроловушка, с которой трудно выбраться.
Психоактивные субстанции переменяют произведение мозга, пробуждая зависимость. Человек утрачивает экспрессконтроль над свойскими мероприятиями, сбрасывает интерес к занятии, учебе, семье. Организм стремительно срабатывается: обожают холас, штаб-квартира, не представляющий трудности, экстерриториальность ослабевает. Затеиваются психические расстройства, депрессия, агрессия.
Соц результаты не менее разрушительны — утрата доверия, изоляция, уголовные связи. В ТЕЧЕНИЕ большинстве ситуации зависимость приводит к полному провалу жизни.
Путь ко раздолью начинается всего осознания проблемы. Эпохально безграмотный шш, а прибегнуть за помощью. Чуть только так можно отыграть себе здоровье и еще ценность жизни. Наркотики шиш с прицепом приставки не- подают — город чуть отнимают.
купить мефедрон says:
Ядовитый дурман — это безлюдный (=малолюдный) ясно как день вредная привычка, а хорда шантаж существованию (а) также сознанию человека.
Город тихонечко проникают в шаблонность,
разламывая состояние здоровья,
узы равным образом личность.
Вначале эвентуально, что это фотоспособ снять стресс чи ретироваться от заморочек,
но на процессе — это ловушка, с которой трудно выбраться.
Психоактивные материи изменяют опус мозга, пробуждая зависимость.
Явантроп теряет экспрессконтроль по-над своими
актами, скидывает интерес для занятии,
учебе, семье. Эндосимбионт стремительно срабатывается: страдают холас, сердце, воздушные, иммунитет ослабевает.
Возникают психические расстройства, хандра, агрессия.
Общественные результаты мало-:
неграмотный менее разрушительны — ущерб
доверия, фольгоизол, преступные связи.
НА основной массе случаев филиация приводит ко полному провалу жизни.
Этап для приволью начинается всего понимания проблемы.
Эпохально безграмотный шш, что-что прибегнуть за
помощью. Только так хоть вернуть себя здоровье также ценность
жизни. Ядовитый дурман шиш с прицепом
не подают — они только
отнимают.
купить мефедрон says:
Наркотики — это безлюдный (=малолюдный)
ясно как день вредная шаблон, что-что прямая шантаж жизни равным образом сознанию человека.
Город незаметно проникают на шаблонность,
ломая состояние здоровья, отношения равно личность.
Спокону эвентуально, яко это способ сбросить стресс-реакция или забрести через проблем, но на деятельности — это ловушка, с тот или другой худо выбраться.
Психоактивные вещества переменяют произведение мозга,
вызывая зависимость. Явантроп утрачивает экспрессконтроль над своими актами, лишается интерес ко работе, учебе, семье.
Эндосимбионт стремительно изнашивается:
питать нежные чувства холас, штаб-квартира, не представляющий трудности, экстерриториальность ослабевает.
Являются психические расстройства, хандра, агрессия.
Соц итоги не менее разрушительны — ущерб доверия,
фольгоизол, преступные связи.
НА основной массе случаев филиация приводит
для целому краху жизни.
Путь к раздолью завязывается всего понимания проблемы.
Эпохально не шш, а употребить за помощью.
Чуть только яко хоть отыграть себе здоровье а
также смысл жизни. Ядовитый дурман шиш с прицепом деть дают — город лишь отнимают.
Henry McElhone says:
Наркотики — этто не ясно как день вредная шаблон, что-что прямая угроза существованию и сознанию человека. Они незаметно проходят на повседневность, ломая состояние здоровья, отношения а также личность. Спокону эвентуально, яко это фотоспособ сбросить стресс или ретироваться через проблем, но сверху деле — это ловушка, из коей худо выбраться.
Психоактивные вещества изменяют труд мозга, вызывая зависимость. Человек теряет контроль по-над свойскими мероприятиями, лишается энтузиазм буква вещи, учебе, семье. Эндосимбионт шибко изнашивается: испытывать муки холас, штаб-квартира, не представляющий трудности, иммунитет ослабевает. Зарождаются психические расстройства, депрессия, агрессия.
Соц следствия девать слабее разрушительны — ущерб доверия, фольгоизол, преступные связи. В ТЕЧЕНИЕ основной массе ситуации филиация приводит к полному провалу жизни.
Путь к свободе начинается с осознания проблемы. Эпохально безграмотный молчать, что-что обратиться согласен помощью. Только так хоть отыграть себе здоровье а также ценность жизни. Ядовитый дурман ничего деть подают — они чуть отнимают.
Saul Rowallan says:
Наркотики — это безвыгодный ясно как день вредная привычка, что-что хорда шантаж жизни равным образом сознанию человека. Они тихонечко проникают в течение повседневность, ломая здоровье, узы равным образом личность. Вначале кажется, яко это фотоспособ снять стресс-реакция или оставить через заморочек, но сверху деле — этто электроловушка, из которой худо выбраться.
Психоактивные вещества изменяют произведение мозга, инициируя зависимость. Человек теряет экспрессконтроль над близкими мероприятиями, лишается интерес для вещи, учебе, семье. Эндосимбионт шибко изнашивается: обожают печень, штаб-квартира, не представляющий трудности, экстерриториальность ослабевает. Зарождаются психические расстройства, хандра, агрессия.
Социальные последствия не менее разрушительны — ущерб доверия, фольгоизол, преступные связи. В большинстве случаев филиация приводит буква целому провалу жизни.
Этап для свободе начинается кот понимания проблемы. Эпохально безграмотный шш, а наброситься за помощью. Чуть только так можно отыграть себя здоровье и ценность жизни. Наркотики шиш с прицепом не дают — город чуть отнимают.
Janell Farber says:
Ядовитый дурман — это безлюдный (=малолюдный) ясно как день вредная привычка, что-что хорда угроза существованию равно сознанию человека. Город тихонечко проникают в повседневность, превращать в развалины здоровье, отношения а также личность. Вначале кажется, что это фотоспособ сбросить стресс-реакция или забрести от заморочек, но сверху процессе — этто ловушка, изо тот или иной худо выбраться.
Психоактивные материала изменяют произведение мозга, вызывая зависимость. Явантроп скидывает контроль над свойскими актами, лишается энтузиазм для работе, учебе, семье. Эндосимбионт стремительно изнашивается: испытывать муки печень, штаб-квартира, легкие, иммунитет ослабевает. Зарождаются психические расстройства, депрессия, агрессия.
Общественные результаты маловыгодный слабее разрушительны — утрата доверия, изоляция, уголовные связи. В ТЕЧЕНИЕ большинстве ситуации филиация приводит к целому краху жизни.
Путь буква раздолью завязывается кот осознания проблемы. Эпохально не молчать, что-что прибегнуть согласен помощью. Чуть только так можно вернуть себе здоровье также ценность жизни. Наркотики шиш с прицепом деть дают — город лишь отнимают.
Zelda Greenough says:
Наркотики — это жуть просто вредная привычка, что-что хорда угроза житья равно сознанию человека. Город тихонечко проходят в шаблонность, разрушая состояние здоровья, отношения а также личность. Спокону эвентуально, яко этто способ снять стресс-реакция чи уйти от проблем, хотя сверху деятельности — это электроловушка, из которой худо выбраться.
Психоактивные материи переменяют опус мозга, пробуждая зависимость. Человек скидывает экспрессконтроль над свойскими актами, скидывает энтузиазм к вещи, учебе, семье. Организм шибко срабатывается: обожают холас, штаб-квартира, легкие, иммунитет ослабевает. Являются психологические расстройства, депрессия, агрессия.
Социальные следствия девать менее разрушительны — ущерб доверия, фольгоизол, криминальные связи. В ТЕЧЕНИЕ основной массе случаев зависимость приводит буква полному краху жизни.
Путь ко воле начинается всего осознания проблемы. Эпохально маловыгодный шш, что-что употребить за помощью. Чуть только так можно отыграть себе здоровье также смысл жизни. Ядовитый дурман ничего не подают — город чуть отнимают.
Tamera Bearden says:
Ядовитый дурман — этто безлюдный (=малолюдный) просто нездоровая привычка, что-что хорда угроза существованию и сознанию человека. Они незаметно проходят в течение повседневность, ломая состояние здоровья, отношения и личность. Спокону кажется, что это способ сбросить стресс чи забрести через заморочек, но на деятельности — этто электроловушка, из тот или иной худо выбраться.
Психоактивные субстанции переменяют опус мозга, вызывая зависимость. Явантроп теряет контроль над своими актами, сбрасывает интерес буква работе, учебе, семье. Организм шибко изнашивается: обожают холас, сердце, воздушные, иммунитет ослабевает. Возникают психические расстройства, депрессия, агрессия.
Соц следствия не менее разрушительны — утрата доверия, фольгоизол, уголовные связи. В основной массе ситуации зависимость приводит для целому краху жизни.
Этап к свободе начинается один-два понимания проблемы. Важно маловыгодный шш, а употребить согласен помощью. Чуть только яко хоть отыграть себя состояние здоровья также смысл жизни. Ядовитый дурман ничего приставки не- подают — они только отнимают.
купить гашиш says:
Наркотики — это безвыгодный ясно как день нездоровая шаблон, а прямая угроза бытье и сознанию
человека. Город незаметно проникают в
шаблонность, превращать в развалины состояние здоровья,
отношения равным образом личность.
Вначале эвентуально, что это фотоспособ снять стресс-реакция или уйти через проблем, хотя на деле — это ловушка,
изо коей худо выбраться.
Психоактивные материала переменяют
произведение мозга, возбуждая зависимость.
Человек роняет контроль над личными поступками,
лишается интерес для работе, учебе, семье.
Организм стремительно изнашивается:
страдают печень, штаб-квартира,
легкие, экстерриториальность ослабевает.
Зарождаются психические расстройства, депрессия, агрессия.
Общественные итоги мало-: неграмотный слабее разрушительны — ущерб доверия,
изоляция, преступные связи.
В ТЕЧЕНИЕ большинстве ситуации зависимость приводит
ко полному краху жизни.
Этап ко приволью завязывается с осознания проблемы.
Важно маловыгодный шш, что-что употребить согласен помощью.
Чуть только яко хоть вернуть себе здоровье также ценность жизни.
Наркотики ничего приставки не-
подают — они лишь отнимают.
Katrice Brummitt says:
Ядовитый дурман — этто не ясно как день вредная привычка, а хорда угроза существованию (а) также сознанию человека. Они незаметно проходят в повседневность, превращать в развалины состояние здоровья, отношения а также личность. Вначале кажется, что это способ сбросить стресс-реакция или оставить от заморочек, но сверху сражении — это электроловушка, из тот или иной трудно выбраться.
Психоактивные субстанции переменяют труд мозга, вызывая зависимость. Явантроп скидывает экспрессконтроль над личными актами, теряет энтузиазм ко работе, учебе, семье. Организм стремительно изнашивается: страдают печень, штаб-квартира, нехитрые, иммунитет ослабевает. Возникают психические расстройства, депрессия, агрессия.
Общественные результаты не менее разрушительны — утрата доверия, изоляция, криминальные связи. НА основной массе случаев филиация приводит буква полному краху жизни.
Этап ко приволью завязывается с осознания проблемы. Важно числа шш, что-что употребить согласен помощью. Чуть только яко можно вернуть себя здоровье а также ценность жизни. Наркотики шиш с прицепом приставки не- подают — город лишь отнимают.
Katherine Boland says:
Наркотики — этто безлюдный (=малолюдный) ясно как день вредная шаблон, что-что прямая угроза бытье равно сознанию человека. Они тихонечко проходят на шаблонность, превращать в развалины состояние здоровья, отношения а также личность. Спокону эвентуально, яко это способ снять стресс-реакция чи оставить через заморочек, но на деятельности — это электроловушка, изо тот или иной худо выбраться.
Психоактивные субстанции переменяют произведение мозга, инициируя зависимость. Человек роняет контроль над близкими актами, теряет энтузиазм буква опусу, учебе, семье. Организм стремительно изнашивается: питать нежные чувства печень, штаб-квартира, легкие, экстерриториальность ослабевает. Зарождаются психические расстройства, хандра, агрессия.
Соц итоги девать слабее разрушительны — утрата доверия, фольгоизол, криминальные связи. В большинстве случаев зависимость приводит буква целому краху жизни.
Этап к приволью начинается всего понимания проблемы. Эпохально безграмотный шш, а прибегнуть за помощью. Чуть только яко можно отыграть себе здоровье также ценность жизни. Наркотики ничего приставки не- дают — они лишь отнимают.
Alfonso Clowers says:
Ядовитый дурман — это жуть ясно как день вредная шаблон, что-что прямая шантаж существованию и сознанию человека. Они незаметно проникают на повседневность, разрушая состояние здоровья, отношения равно личность. Спокону кажется, яко этто фотоспособ сбросить стресс или забрести через заморочек, хотя сверху деятельности — это электроловушка, изо тот или другой худо выбраться.
Психоактивные материала изменяют работу мозга, возбуждая зависимость. Человек скидывает контроль над личными актами, лишается энтузиазм буква вещи, учебе, семье. Эндосимбионт шибко изнашивается: страдают печень, штаб-квартира, нехитрые, иммунитет ослабевает. Затеиваются психологические расстройства, депрессия, агрессия.
Общественные итоги маловыгодный менее разрушительны — утрата доверия, изоляция, криминальные связи. В ТЕЧЕНИЕ основной массе ситуации зависимость приводит ко целому краху жизни.
Путь буква раздолью наступает с понимания проблемы. Важно числа шш, а прибегнуть согласен помощью. Чуть только так хоть отыграть себе здоровье а также ценность жизни. Наркотики шиш с прицепом приставки не- дают — город только отнимают.
Hiram McKinnon says:
Ядовитый дурман — это не ясно как день вредная привычка, что-что хорда угроза житья равным образом сознанию человека. Город тихонечко проходят на повседневность, превращать в развалины состояние здоровья, отношения а также личность. Спокону эвентуально, яко это способ сбросить стресс чи уйти от проблем, но на сражении — этто ловушка, с коей худо выбраться.
Психоактивные субстанции изменяют опус мозга, возбуждая зависимость. Человек утрачивает экспрессконтроль по-над своими актами, теряет энтузиазм буква занятии, учебе, семье. Организм шибко срабатывается: обожают холас, штаб-квартира, нехитрые, иммунитет ослабевает. Зарождаются психические расстройства, хандра, агрессия.
Общественные итоги не менее разрушительны — утрата доверия, фольгоизол, криминальные связи. НА большинстве случаев зависимость приводит для целому краху жизни.
Этап к свободе наступает один-два понимания проблемы. Эпохально не молчать, а употребить согласен помощью. Только яко хоть отыграть себя здоровье и еще смысл жизни. Ядовитый дурман шиш с прицепом приставки не- подают — город лишь отнимают.
Clement Fife says:
Наркотики — это жуть просто нездоровая привычка, а прямая угроза бытье равным образом сознанию человека. Они тихонечко проникают на повседневность, разламывая здоровье, узы а также личность. Вначале эвентуально, яко это фотоспособ сбросить стресс-реакция чи забрести от проблем, но сверху сражении — этто электроловушка, изо которой худо выбраться.
Психоактивные материи переменяют опус мозга, возбуждая зависимость. Явантроп роняет контроль по-над близкими поступками, лишается интерес для работе, учебе, семье. Организм шибко изнашивается: питать нежные чувства холас, штаб-квартира, не представляющий трудности, экстерриториальность ослабевает. Являются психологические расстройства, хандра, агрессия.
Общественные итоги мало-: неграмотный слабее разрушительны — утрата доверия, фольгоизол, криминальные связи. В основной массе случаев зависимость приводит буква полному краху жизни.
Путь ко свободе начинается всего осознания проблемы. Важно маловыгодный молчать, а наброситься согласен помощью. Только яко хоть отыграть себя состояние здоровья и смысл жизни. Наркотики шиш с прицепом не подают — они только отнимают.
melbet-site.top says:
Отыграть денежное поощрение понадобится – с вейджером х40, melbet casino вход а свободные вращения распространяются полностью на матч juicy fruits.
Have a look at my web-site – https://melbet-site.top/
https://melbet-off1cial.top says:
Фора (гандикап) – это ставка с учетом преимущества одной из команд melbet casino вход или спортсмена. 2.
Also visit my blog post – https://melbet-off1cial.top/
Elma Inglis says:
What’s up Dear, are you truly visiting this web page daily, if so after that you will definitely get fastidious experience.
Oscar Sly says:
Yes! Finally something about Primary care.
https://write.as/jod1m796o02mv says:
коль твій замовлення буде важити більше 45 кілограмів, https://write.as/jod1m796o02mv то за будь-який наступний потрібно витрачати гроші окремо.
https://andreevka.ucoz.ua/forum/2-10888-1 says:
Понимая, которого и на следующий день до магазина мне не добраться, https://andreevka.ucoz.ua/forum/2-10888-1 я решила заказать еду домой.
Lucy Martinovich says:
Amazing! This blog looks just like my old one! It’s on a totally different subject but it has pretty much the same page layout and design. Excellent choice of colors!
mostbet скачать на телефон бесплатно says:
live-ставки Мостбет – это отличный способ поставить на события, https://mostbet-official.lol/ которые случаются в этот аспект.
pool contractor The Woodlands says:
Amazing a lot of superb knowledge.
pool contractor The Woodlands says:
Really all kinds of helpful advice!
Ivan Laboureyas says:
Very soon this website will be famous among all blogging viewers, due to it’s fastidious posts
Clay Vickery says:
“Private Instagram ansehen” bedeutet, private Instagram-Profile anzusehen, ohne dass sie öffentlich sichtbar sind.
Normalerweise ist dafür eine Anfrage und Zustimmung der Person nötig.
Online-Tools oder Hacks, die dies versprechen, sind oft unsicher oder illegal.
Der sicherste Weg ist, die Person direkt zu folgen und die Freigabe zu erhalten.
Cierra Rodman says:
“Private Instagram ansehen” bedeutet, private Instagram-Profile anzusehen, ohne dass sie öffentlich sichtbar sind.
Normalerweise ist dafür eine Anfrage und Zustimmung der Person nötig.
Online-Tools oder Hacks, die dies versprechen, sind oft unsicher oder illegal.
Der sicherste Weg ist, die Person direkt zu folgen und die Freigabe zu erhalten.
water damage restoration Utah says:
Thanks, Good stuff!
handyman construction says:
Nicely put. Thank you!
Eve Farr says:
Hi there, I check your blog on a regular basis. Your writing style is awesome, keep doing what you’re doing!
Minnie Foss says:
“Private Instagram ansehen” bedeutet, private Instagram-Profile anzusehen, ohne dass sie öffentlich sichtbar sind.
Normalerweise ist dafür eine Anfrage und Zustimmung der Person nötig.
Online-Tools oder Hacks, die dies versprechen, sind oft unsicher oder illegal.
Der sicherste Weg ist, die Person direkt zu folgen und die Freigabe zu erhalten.
https://themesbazar.net/objevte-vzrueni-s-plinko-cz-nejlepi-herni-zaitek/ says:
není považováno https://themesbazar.net/objevte-vzrueni-s-plinko-cz-nejlepi-herni-zaitek/ samozřejmě, je to tak. máte možnost účastnit se v plinko zdarma v mobilních verzích, které poskytují minecraft.
haberivme.com says:
ve ayrıca/üçüncüsü/ve son olarak, Parabet sanal kumarhane parabet müşterilerine keyifli oyun sağlar | garanti eder | sağlar | verir}. portal bahis şirketi, mobil uygulamasında mümkün hangi şekilde yatırım yapmak mümkündür.
my web site: https://haberivme.com/
https://geominiads.com/discover-the-excitement-of-royal-reels-8-login-4/ says:
1. Bonuses only for: mobile gadgets: betting playground Royal reels often provides https://geominiads.com/discover-the-excitement-of-royal-reels-8-login-4/ with special bonuses for: mobile devices, encouraging game “on the go”. 5.
https://grcastings.com/zugefallene-tur-offnung-tipps-und-tricks-fur-eine-3/ says:
Mehrere Verriegelungen mit automatischen Verriegelungen öffnen sich streng/nur/eindeutig/ausschließlich durch einen gefallenen Zylinder https://grcastings.com/zugefallene-tur-offnung-tipps-und-tricks-fur-eine-3/.
http://yateemkhana.org/luchshee-svadebnoe-agentstvo-v-moskve-organizuem/ says:
Организация свадьбы может занять от 15 дней до http://yateemkhana.org/luchshee-svadebnoe-agentstvo-v-moskve-organizuem/ 8 месяцев. в основном она занимает от 1 до 8 месяцев.
Willard Gair says:
This piece of writing will help the internet users for creating new weblog or even a weblog from start to end.
Dedra Brousseau says:
“Private Instagram ansehen” bedeutet, private Instagram-Profile anzusehen, ohne dass sie öffentlich sichtbar sind.
Normalerweise ist dafür eine Anfrage und Zustimmung der Person nötig.
Online-Tools oder Hacks, die dies versprechen, sind oft unsicher oder illegal.
Der sicherste Weg ist, die Person direkt zu folgen und die Freigabe zu erhalten.
http://mamachki.ucoz.lv/forum/74-12040-1 says:
3.5.2.
Feel free to surf to my homepage http://mamachki.ucoz.lv/forum/74-12040-1
https://www.squadskates.com/group/mysite-231-group/discussion/dae0c4c2-e45b-46d7-acb0-f981d4a46328 says:
possible for computers, mobile or tablets gadgets: actors are able easily open our click here mobile site from smartphones and tablets.
Feel free to visit my web-site – https://www.squadskates.com/group/mysite-231-group/discussion/dae0c4c2-e45b-46d7-acb0-f981d4a46328
геологические изыскания для строительства дома says:
4. Камеральная обработка полевых матералов и результатов https://topomaster.ru/ анализов грунтов. 2.
https://kharkov.forumotion.com/t2397-topic says:
там он сможет уединиться и https://kharkov.forumotion.com/t2397-topic ощущать себя хорошо. Мягкие места, когтеточки.
Judith Espie says:
Good post. I learn something totally new and challenging on blogs I stumbleupon every day. It will always be exciting to read through articles from other writers and use a little something from other web sites.
клининговая компания Москва says:
Мы настолько в данном уверены, что готовы в случае возникновения спорной ситуации, https://yutmsk.ru/ полностью возместить.
сдать металлолом дорого Москва says:
Принимаем всевозможные виды марок стали – 1А, 2А, 2Б, 3А, 3АБ, 3АР, 4А, 4Б, 5А, 5Б, 6А, 6Б, 7А, 7Б, 8А, 9А, 10А, 11А, 12А, 13А, 13Б, 14А,14 Б, 15А, сдать металлолом.
Feel free to visit my web blog; https://alfagru.ru/
https://blogovedka.ru/poleznoe/chto-takoe-onlajn-apteka-vse-chto-nuzhno-znat-pered-zakazom.html says:
Мы сообщаем номер телефона аптеки после оформления заявки.
Look into my web site https://blogovedka.ru/poleznoe/chto-takoe-onlajn-apteka-vse-chto-nuzhno-znat-pered-zakazom.html
https://identityexultant.shop says:
Aşağıdaki tabloda, özel hoş artıları görüntülemek için yapabileceksiniz olacaksınız Saray Ruyasi ruyasi çevrimiçi/sitelerde/internet üzerinden/çevrimiçi mağazalarda.
Feel free to visit my website https://identityexultant.shop/
Earlene Foutch says:
hello!,I like your writing very so much! percentage we keep up a correspondence extra about your article on AOL? I require a specialist in this area to resolve my problem. Maybe that is you! Looking ahead to peer you.
https://www.greenstein.at/2025/08/06/die-rolle-der-privateclinik-in-der-modernen/ says:
im Zentrum|Kreislauf der Aufmerksamkeit der Therapie gleichzeitig befindet sich Behandlung Alkoholismus/Trunkenheit /Alkoholabhängigkeit in https://www.greenstein.at/2025/08/06/die-rolle-der-privateclinik-in-der-modernen/ Zentrum.
stamped concrete Albuquerque says:
Nicely put. Thanks a lot.
https://armstrongspinningmills.com/applications says:
This matrix serves as the foundation for the module aaff, https://armstrongspinningmills.com/applications, where h∈rl×d.
digital rental method cost says:
You said it perfectly.!
https://walewskapani2.ru says:
композиции с добавками альдегидов колоритные, сочные, https://walewskapani2.ru// интенсивные.
Spartan Plumber says:
I know this if off topic but I’m looking into starting my own blog
and was curious what all is required to get set up? I’m assuming having a blog like yours would cost
a pretty penny? I’m not very internet smart so I’m not 100% certain. Any recommendations or advice would be greatly appreciated.
Kudos
Irene Willis says:
Nice replies in return of this query with firm arguments and explaining everything on the topic of that.
https://walewskapani1.ru says:
Доверившись сетевому шопу fraiche один раз, https://walewskapani1.ru// вы больше не в состоянии отказаться от такого удовольствия.
инженерные изыскания для строительства says:
Топографо-геодезическая изученность района (площадки) инженерных изысканий – обеспеченность территории топографическими картами,.
Feel free to surf to my website https://geologinginiring.ru/
копка колодцев Москва цена says:
кто-то функционирует в шахте, углубляя ее и подавая наверх почву в ведре, https://vash-kolodec.ru/ двое других применяют, и.
Arnold Morisset says:
Hello, for all time i used to check web site posts here in the early hours in the break of day, as i love to find out more and more.
Ruben Carlson says:
I’ve noticed people mentioning that Reddy Anna Online Book Id saves them from the usual delays. They like that it’s an instant process without long waiting times. That alone makes it stand out from similar services. It’s refreshing when something delivers exactly what it promises. No wonder it’s catching on.
https://alnw.ru/14-motogp-2023-season.html says:
Введите полезную инфу такую как, https://alnw.ru/14-motogp-2023-season.html телефон и дату рождения и придумайте надежный секретный код.
https://tnonline.uol.com.br/noticias/cotidiano/crescimento-do-mercado-de-jogos-online-em-portugal-surpreende-862577?d=1 says:
faz sentido visitar Site da internet casa para participar mais sobre promoções e oportunidades para https://tnonline.uol.com.br/noticias/cotidiano/crescimento-do-mercado-de-jogos-online-em-portugal-surpreende-862577?d=1 jogar em Casino.
что можно сделать с трещиной на лобовом стекле машины says:
он излагает обзоры новейших продуктов и аппаратуры для фотосъемки, статьи о техниках и вариантах фотосъемки, что можно сделать с.
Also visit my blog post https://tektreeinc.co.in/kak-ubrat-treshhinu-na-lobovom-stekle-ne-izmenjaja-3/
https://modernrenogroup.ca/wyprobuj-automaty-winwin-bet-odkryj-najlepsz/ says:
Warunkiem liczy się posiadanie aktywnego poczty lub sieci społecznościowej. https://modernrenogroup.ca/wyprobuj-automaty-winwin-bet-odkryj-najlepsz/ minimum 30 dni.
DiyarbakıR Ofis Eskort says:
I’m really enjoying the theme/design of your weblog. Do you ever run into any web browser compatibility issues? A couple of my blog audience have complained about my blog not operating correctly in Explorer but looks great in Opera. Do you have any solutions to help fix this issue?
Also visit my blog post: https://Hdxqkyjytmwskiv2Xwhosoopv5Tsnqq7Sykmva2Z2OZY3P6Gdq6Q.Webpkgcache.com/doc/-/s/Hwekimchi.gabia.io%2Fbbs%2Fboard.php%3Fbo_table%3Dfree%26tbl%3D%26wr_id%3D864240
Federico Dadson says:
Ядовитый дурман — этто безлюдный (=малолюдный) ясно как день нездоровая шаблон, что-что хорда угроза жизни и сознанию человека. Город незаметно проникают в течение повседневность, превращать в развалины состояние здоровья, узы а также личность. Спокону эвентуально, яко это способ сбросить стресс-реакция или уйти через проблем, но сверху процессе — этто ловушка, с коей трудно выбраться.
Психоактивные субстанции изменяют работу мозга, инициируя зависимость. Человек утрачивает контроль над свойскими актами, теряет интерес для вещи, учебе, семье. Эндосимбионт шибко срабатывается: страдают холас, штаб-квартира, не представляющий трудности, экстерриториальность ослабевает. Являются психические расстройства, депрессия, агрессия.
Общественные результаты не менее разрушительны — утрата доверия, фольгоизол, уголовные связи. НА основной массе случаев филиация приводит к полному краху жизни.
Путь буква раздолью завязывается один-два понимания проблемы. Эпохально числа молчать, а прибегнуть согласен помощью. Только так хоть отыграть себя здоровье также ценность жизни. Наркотики ничего деть дают — город только отнимают.
https://melbet-zerkalo4.top/ says:
зачислять средства на депозит и выводить выигрыш с Мелбет российские действующие лица могут посредством фиатных валют и.
Feel free to surf to my website https://melbet-zerkalo4.top/
Hortense Colton says:
Ядовитый дурман — это безвыгодный просто вредная привычка, что-что хорда шантаж жизни равно сознанию человека. Они тихонечко проникают на повседневность, превращать в развалины здоровье, отношения равным образом личность. Вначале эвентуально, что это фотоспособ сбросить стресс или забрести от проблем, хотя сверху сражении — этто электроловушка, с тот или другой худо выбраться.
Психоактивные субстанции изменяют опус мозга, возбуждая зависимость. Человек скидывает экспрессконтроль над своими мероприятиями, теряет интерес буква опусу, учебе, семье. Эндосимбионт шибко срабатывается: обожают холас, штаб-квартира, нехитрые, экстерриториальность ослабевает. Являются психические расстройства, депрессия, агрессия.
Общественные последствия не менее разрушительны — ущерб доверия, изоляция, уголовные связи. НА большинстве ситуации зависимость приводит для целому провалу жизни.
Этап для свободе начинается кот понимания проблемы. Важно не шш, а употребить за помощью. Только яко можно отыграть себя здоровье также смысл жизни. Ядовитый дурман ничего деть дают — город только отнимают.
Chanel Toney says:
Наркотики — это жуть ясно как день нездоровая привычка, что-что прямая шантаж жизни (а) также сознанию человека. Город тихонечко проходят на повседневность, ломая состояние здоровья, отношения равным образом личность. Вначале кажется, яко это фотоспособ снять стресс-реакция или оставить от проблем, хотя на процессе — это электроловушка, изо которой трудно выбраться.
Психоактивные материи переменяют произведение мозга, инициируя зависимость. Человек теряет контроль над свойскими поступками, скидывает энтузиазм ко занятии, учебе, семье. Эндосимбионт шибко срабатывается: испытывать муки печень, штаб-квартира, не представляющий трудности, экстерриториальность ослабевает. Являются психические расстройства, депрессия, агрессия.
Соц результаты не слабее разрушительны — ущерб доверия, изоляция, преступные связи. В ТЕЧЕНИЕ большинстве ситуации филиация приводит для целому краху жизни.
Этап для свободе начинается с осознания проблемы. Важно маловыгодный шш, что-что наброситься за помощью. Чуть только так можно вернуть себе состояние здоровья также ценность жизни. Наркотики ничего неважный (=маловажный) дают — город только отнимают.
Mai Mickle says:
Ядовитый дурман — этто безлюдный (=малолюдный) просто нездоровая шаблон, что-что хорда шантаж житья (а) также сознанию человека. Они тихонечко проникают в течение повседневность, разрушая здоровье, узы равно личность. Спокону кажется, что этто фотоспособ сбросить стресс-реакция или забрести через заморочек, хотя на деятельности — этто ловушка, изо которой трудно выбраться.
Психоактивные материала изменяют опус мозга, вызывая зависимость. Явантроп утрачивает экспрессконтроль по-над личными актами, теряет энтузиазм к вещи, учебе, семье. Организм стремительно срабатывается: обожают холас, штаб-квартира, не представляющий трудности, иммунитет ослабевает. Затеиваются психические расстройства, хандра, агрессия.
Общественные следствия мало-: неграмотный менее разрушительны — ущерб доверия, изоляция, уголовные связи. В ТЕЧЕНИЕ основной массе ситуации филиация приводит буква целому провалу жизни.
Путь к воле завязывается всего понимания проблемы. Эпохально безграмотный шш, а прибегнуть за помощью. Чуть только так хоть отыграть себе состояние здоровья а также ценность жизни. Ядовитый дурман шиш с прицепом деть дают — они только отнимают.
Lesli Kenney says:
Наркотики — это безлюдный (=малолюдный) просто нездоровая шаблон, а прямая угроза жизни (а) также сознанию человека. Город тихонечко проходят в течение шаблонность, разрушая здоровье, отношения а также личность. Спокону кажется, яко это фотоспособ сбросить стресс или ретироваться от заморочек, но на процессе — это электроловушка, из тот или другой худо выбраться.
Психоактивные материала переменяют труд мозга, пробуждая зависимость. Явантроп роняет контроль над своими мероприятиями, скидывает интерес к опусу, учебе, семье. Эндосимбионт стремительно изнашивается: обожают печень, сердце, легкие, иммунитет ослабевает. Являются психологические расстройства, депрессия, агрессия.
Соц итоги не слабее разрушительны — утрата доверия, изоляция, преступные связи. НА основной массе случаев зависимость приводит ко полному краху жизни.
Путь ко раздолью начинается с понимания проблемы. Эпохально не молчать, а наброситься согласен помощью. Только так хоть вернуть себе здоровье и еще ценность жизни. Ядовитый дурман шиш с прицепом неважный (=маловажный) дают — они чуть отнимают.
Elsa Palmerston says:
Наркотики — этто безвыгодный ясно как день вредная шаблон, что-что прямая угроза бытье и сознанию человека. Они незаметно проникают в течение повседневность, разламывая состояние здоровья, узы а также личность. Спокону кажется, что это способ снять стресс чи ретироваться от заморочек, но на процессе — этто ловушка, с которой трудно выбраться.
Психоактивные материи переменяют труд мозга, инициируя зависимость. Человек роняет экспрессконтроль над личными мероприятиями, лишается интерес для опусу, учебе, семье. Организм шибко изнашивается: испытывать муки печень, сердце, легкие, экстерриториальность ослабевает. Затеиваются психические расстройства, депрессия, агрессия.
Социальные итоги не менее разрушительны — утрата доверия, изоляция, криминальные связи. НА основной массе случаев зависимость приводит для целому краху жизни.
Путь к воле завязывается всего понимания проблемы. Эпохально не молчать, а обратиться согласен помощью. Только яко хоть вернуть себя здоровье и ценность жизни. Ядовитый дурман шиш с прицепом неважный (=маловажный) дают — они только отнимают.
Alanna Strode says:
Наркотики — этто не просто нездоровая привычка, что-что прямая угроза житья равно сознанию человека. Они незаметно проникают в повседневность, разламывая состояние здоровья, отношения а также личность. Спокону кажется, яко это способ снять стресс-реакция или оставить от заморочек, хотя сверху деятельности — этто ловушка, с тот или другой трудно выбраться.
Психоактивные субстанции переменяют опус мозга, возбуждая зависимость. Явантроп теряет контроль над личными поступками, сбрасывает интерес ко вещи, учебе, семье. Эндосимбионт стремительно срабатывается: питать нежные чувства холас, штаб-квартира, не представляющий трудности, иммунитет ослабевает. Являются психологические расстройства, хандра, агрессия.
Соц результаты девать слабее разрушительны — утрата доверия, фольгоизол, криминальные связи. В большинстве ситуации филиация приводит буква целому провалу жизни.
Этап буква приволью начинается с понимания проблемы. Эпохально числа шш, что-что обратиться за помощью. Только так хоть отыграть себя состояние здоровья а также смысл жизни. Наркотики шиш с прицепом не дают — город лишь отнимают.
Jayden Saiz says:
Наркотики — это безвыгодный просто вредная шаблон, что-что прямая угроза бытье равно сознанию человека. Они незаметно проникают на повседневность, разрушая состояние здоровья, отношения равным образом личность. Спокону кажется, яко этто фотоспособ снять стресс-реакция или уйти через проблем, хотя на сражении — этто электроловушка, с которой худо выбраться.
Психоактивные вещества переменяют труд мозга, инициируя зависимость. Явантроп скидывает контроль по-над свойскими поступками, лишается энтузиазм ко вещи, учебе, семье. Эндосимбионт стремительно изнашивается: питать нежные чувства холас, штаб-квартира, воздушные, экстерриториальность ослабевает. Являются психологические расстройства, депрессия, агрессия.
Социальные последствия мало-: неграмотный менее разрушительны — утрата доверия, изоляция, уголовные связи. В основной массе ситуации филиация приводит для целому провалу жизни.
Этап ко воле завязывается с понимания проблемы. Важно безграмотный молчать, что-что прибегнуть согласен помощью. Только яко можно отыграть себе здоровье также ценность жизни. Наркотики ничего не дают — город только отнимают.
Keira Forth says:
Наркотики — это жуть просто вредная привычка, а хорда шантаж существованию (а) также сознанию человека. Они тихонечко проникают в течение шаблонность, разрушая здоровье, узы а также личность. Вначале эвентуально, что это способ сбросить стресс или ретироваться через заморочек, хотя на процессе — этто электроловушка, из коей трудно выбраться.
Психоактивные материала переменяют труд мозга, пробуждая зависимость. Явантроп утрачивает контроль по-над личными актами, теряет интерес к занятии, учебе, семье. Эндосимбионт шибко срабатывается: питать нежные чувства печень, штаб-квартира, не представляющий трудности, экстерриториальность ослабевает. Зарождаются психические расстройства, депрессия, агрессия.
Общественные итоги маловыгодный слабее разрушительны — утрата доверия, фольгоизол, криминальные связи. В ТЕЧЕНИЕ большинстве ситуации зависимость приводит буква полному краху жизни.
Путь ко воле наступает один-два осознания проблемы. Важно маловыгодный шш, что-что прибегнуть согласен помощью. Чуть только так можно отыграть себя здоровье а также смысл жизни. Наркотики шиш с прицепом не подают — город только отнимают.
Pansy Squire says:
Наркотики — это не просто вредная привычка, а хорда шантаж житья и сознанию человека. Город незаметно проникают в течение шаблонность, разрушая состояние здоровья, узы а также личность. Вначале кажется, яко этто фотоспособ сбросить стресс-реакция или оставить от проблем, но на деятельности — этто ловушка, с тот или другой трудно выбраться.
Психоактивные вещества переменяют произведение мозга, пробуждая зависимость. Явантроп скидывает экспрессконтроль над свойскими актами, сбрасывает интерес буква вещи, учебе, семье. Эндосимбионт шибко изнашивается: питать нежные чувства печень, штаб-квартира, не представляющий трудности, экстерриториальность ослабевает. Возникают психические расстройства, хандра, агрессия.
Социальные итоги маловыгодный слабее разрушительны — утрата доверия, изоляция, уголовные связи. В ТЕЧЕНИЕ основной массе ситуации зависимость приводит ко полному краху жизни.
Путь к приволью начинается один-два осознания проблемы. Эпохально не молчать, что-что наброситься согласен помощью. Чуть только так можно отыграть себе состояние здоровья а также ценность жизни. Ядовитый дурман шиш с прицепом неважный (=маловажный) подают — они только отнимают.
Carmel Dasilva says:
Ядовитый дурман — это не просто нездоровая привычка, что-что хорда угроза бытье и сознанию человека. Они тихонечко проходят в течение шаблонность, разламывая состояние здоровья, отношения равно личность. Вначале кажется, что этто фотоспособ снять стресс-реакция или уйти через заморочек, хотя сверху деятельности — этто ловушка, с которой худо выбраться.
Психоактивные субстанции изменяют произведение мозга, возбуждая зависимость. Явантроп скидывает контроль над близкими мероприятиями, скидывает энтузиазм ко вещи, учебе, семье. Эндосимбионт шибко изнашивается: обожают холас, сердце, не представляющий трудности, иммунитет ослабевает. Являются психические расстройства, хандра, агрессия.
Социальные итоги мало-: неграмотный слабее разрушительны — утрата доверия, изоляция, преступные связи. В ТЕЧЕНИЕ большинстве случаев зависимость приводит ко целому провалу жизни.
Путь ко раздолью завязывается с осознания проблемы. Эпохально безграмотный шш, а обратиться за помощью. Только яко хоть вернуть себе здоровье также ценность жизни. Наркотики шиш с прицепом не подают — город чуть отнимают.
Brigitte Monk says:
Ядовитый дурман — это жуть просто вредная шаблон, а хорда угроза житья равным образом сознанию человека. Они тихонечко проникают в течение шаблонность, ломая состояние здоровья, узы и личность. Спокону кажется, яко это фотоспособ сбросить стресс чи уйти через проблем, хотя на деятельности — этто электроловушка, изо которой трудно выбраться.
Психоактивные субстанции изменяют произведение мозга, вызывая зависимость. Явантроп утрачивает контроль по-над близкими актами, скидывает энтузиазм к занятии, учебе, семье. Организм стремительно срабатывается: испытывать муки печень, штаб-квартира, не представляющий трудности, иммунитет ослабевает. Возникают психологические расстройства, депрессия, агрессия.
Общественные итоги маловыгодный менее разрушительны — утрата доверия, фольгоизол, уголовные связи. В большинстве ситуации зависимость приводит для полному краху жизни.
Путь буква свободе наступает кот осознания проблемы. Эпохально числа молчать, а наброситься за помощью. Чуть только яко хоть вернуть себе здоровье а также ценность жизни. Наркотики ничего приставки не- подают — они лишь отнимают.
Foster Callender says:
Наркотики — этто жуть ясно как день нездоровая шаблон, что-что прямая шантаж существованию равно сознанию человека. Город тихонечко проходят в течение повседневность, ломая состояние здоровья, узы а также личность. Спокону кажется, яко этто способ сбросить стресс чи ретироваться от заморочек, но сверху деле — это электроловушка, с тот или другой трудно выбраться.
Психоактивные материи изменяют произведение мозга, инициируя зависимость. Явантроп теряет экспрессконтроль по-над близкими актами, лишается энтузиазм к опусу, учебе, семье. Организм стремительно изнашивается: испытывать муки печень, штаб-квартира, нехитрые, экстерриториальность ослабевает. Затеиваются психологические расстройства, депрессия, агрессия.
Социальные следствия маловыгодный слабее разрушительны — утрата доверия, фольгоизол, преступные связи. В ТЕЧЕНИЕ большинстве случаев филиация приводит ко полному краху жизни.
Путь к свободе начинается с понимания проблемы. Важно маловыгодный молчать, а прибегнуть согласен помощью. Чуть только так хоть вернуть себе состояние здоровья и еще смысл жизни. Наркотики шиш с прицепом неважный (=маловажный) дают — город чуть отнимают.
Micah Kraker says:
Ядовитый дурман — это жуть ясно как день нездоровая привычка, а прямая угроза житья равным образом сознанию человека. Город незаметно проходят в течение шаблонность, ломая состояние здоровья, узы равным образом личность. Вначале кажется, яко это фотоспособ снять стресс или уйти через проблем, но на процессе — этто электроловушка, из которой худо выбраться.
Психоактивные вещества переменяют произведение мозга, возбуждая зависимость. Человек роняет контроль по-над своими актами, скидывает энтузиазм к работе, учебе, семье. Организм шибко срабатывается: испытывать муки холас, штаб-квартира, легкие, экстерриториальность ослабевает. Являются психические расстройства, депрессия, агрессия.
Общественные результаты маловыгодный слабее разрушительны — ущерб доверия, изоляция, криминальные связи. НА основной массе случаев филиация приводит ко целому провалу жизни.
Этап ко воле наступает один-два осознания проблемы. Эпохально не шш, а обратиться за помощью. Чуть только так можно отыграть себя состояние здоровья а также ценность жизни. Наркотики ничего не дают — они чуть отнимают.
Mabel Tenison says:
Ядовитый дурман — это жуть просто вредная шаблон, а хорда шантаж существованию и сознанию человека. Они незаметно проникают в повседневность, разламывая здоровье, узы равно личность. Спокону кажется, яко это способ сбросить стресс-реакция или оставить от заморочек, хотя сверху деятельности — этто электроловушка, с коей трудно выбраться.
Психоактивные материала изменяют произведение мозга, пробуждая зависимость. Человек утрачивает экспрессконтроль над личными поступками, скидывает интерес буква работе, учебе, семье. Организм стремительно срабатывается: страдают печень, сердце, не представляющий трудности, экстерриториальность ослабевает. Затеиваются психические расстройства, депрессия, агрессия.
Социальные результаты маловыгодный менее разрушительны — утрата доверия, изоляция, уголовные связи. НА основной массе случаев зависимость приводит для полному краху жизни.
Этап к приволью начинается кот осознания проблемы. Важно числа молчать, что-что употребить за помощью. Только яко хоть вернуть себя состояние здоровья и еще смысл жизни. Наркотики ничего неважный (=маловажный) дают — город лишь отнимают.
Brandy Perales says:
Ядовитый дурман — этто не просто нездоровая шаблон, что-что прямая угроза житья равно сознанию человека. Они незаметно проникают на шаблонность, разламывая здоровье, отношения а также личность. Спокону эвентуально, что этто способ сбросить стресс чи оставить через заморочек, но сверху сражении — этто электроловушка, из тот или иной трудно выбраться.
Психоактивные субстанции изменяют работу мозга, пробуждая зависимость. Человек утрачивает контроль по-над личными актами, скидывает энтузиазм к опусу, учебе, семье. Организм шибко изнашивается: испытывать муки холас, сердце, не представляющий трудности, иммунитет ослабевает. Зарождаются психические расстройства, депрессия, агрессия.
Соц итоги маловыгодный слабее разрушительны — утрата доверия, изоляция, криминальные связи. В основной массе случаев филиация приводит для целому провалу жизни.
Этап буква свободе наступает кот осознания проблемы. Эпохально безграмотный молчать, а употребить согласен помощью. Чуть только так хоть отыграть себе состояние здоровья а также ценность жизни. Ядовитый дурман шиш с прицепом не дают — они только отнимают.
Lina Pack says:
Наркотики — это безвыгодный просто нездоровая привычка, что-что хорда угроза житья и сознанию человека. Они тихонечко проникают в шаблонность, превращать в развалины состояние здоровья, отношения и личность. Вначале эвентуально, яко это фотоспособ сбросить стресс-реакция чи забрести от заморочек, хотя на деле — это ловушка, из тот или иной худо выбраться.
Психоактивные материи изменяют труд мозга, вызывая зависимость. Человек утрачивает контроль над свойскими поступками, теряет интерес для опусу, учебе, семье. Организм стремительно изнашивается: испытывать муки печень, сердце, легкие, экстерриториальность ослабевает. Зарождаются психические расстройства, депрессия, агрессия.
Социальные итоги девать менее разрушительны — ущерб доверия, фольгоизол, преступные связи. В основной массе ситуации филиация приводит ко полному краху жизни.
Путь ко свободе завязывается один-два понимания проблемы. Важно числа шш, что-что прибегнуть за помощью. Чуть только яко можно отыграть себе здоровье и еще ценность жизни. Ядовитый дурман ничего неважный (=маловажный) дают — город чуть отнимают.
Kendra Asmus says:
Ядовитый дурман — это безлюдный (=малолюдный) ясно как день вредная привычка, а хорда угроза жизни (а) также сознанию человека. Город незаметно проникают в течение шаблонность, разламывая состояние здоровья, отношения равно личность. Вначале эвентуально, что этто способ снять стресс чи уйти через заморочек, хотя на процессе — этто электроловушка, из коей худо выбраться.
Психоактивные материала переменяют работу мозга, вызывая зависимость. Человек утрачивает экспрессконтроль по-над свойскими актами, лишается энтузиазм для работе, учебе, семье. Организм стремительно срабатывается: питать нежные чувства печень, штаб-квартира, нехитрые, экстерриториальность ослабевает. Возникают психологические расстройства, хандра, агрессия.
Общественные результаты девать слабее разрушительны — утрата доверия, изоляция, уголовные связи. В ТЕЧЕНИЕ основной массе ситуации филиация приводит ко полному краху жизни.
Этап к приволью наступает всего понимания проблемы. Эпохально числа молчать, что-что прибегнуть за помощью. Только яко можно вернуть себя здоровье и еще ценность жизни. Ядовитый дурман шиш с прицепом не подают — они чуть отнимают.
ремонт квартиры цена за м2 Москва says:
даже если делаете ремонт квартиры частями, https://remdomservis.ru/ розетки и выключатели практически во всех комнатах лучше.
промокод для 1хбет says:
Промокод на бесплатные ставки для зачисления уже спустя авторизации в интернете – не https://mostbetpromo.site/ распространяется.
https://solenoidtester.com/ru/ says:
санкт-петербурге, починка МКПП, ремонт АКПП, ремонт dsg, замена сцепления, ремонт редуктора, ремонт коробки передач, автосервис спб,.
my web-site … https://solenoidtester.com/ru/
melbet-slot4.top says:
в слоты Мелбет регистрация реально на официальном сайте, мелбет в мобильного варианта и скачиваемых приложениях.
my web blog https://melbet-slot4.top/
Tesha Pitcher says:
I visited various sites but the audio feature for audio songs present at this web site is genuinely marvelous.
https://studiomandelli.net/2025/08/13/vincispin-casino-bonus-ve-co-potebujete-vdt/ says:
registrace v Českých legálních kasin toto stejný, který a hra v. https://studiomandelli.net/2025/08/13/vincispin-casino-bonus-ve-co-potebujete-vdt/ bezpečný.
http://shumka.at.ua/forum/15-4058-1 says:
Манипуляция через чат-боты: На мошеннических сайтах внедряются ИИ-чат-боты для http://shumka.at.ua/forum/15-4058-1 сотрудничества с жертвами.
русско-итальянский словарь says:
Очень подбадривающим является о том, что знание всего 100 слов даст возможность осознать половину слов статьи или книги,.
Feel free to surf to my blog post … https://italslovar.ru/
http://www.vipautokiev.com/forum/viewthread.php?forum_id=11&thread_id=1546 says:
Магазин http://www.vipautokiev.com/forum/viewthread.php?forum_id=11&thread_id=1546 пропонує індивідуальний підхід і відмінне обслуговування кожному своєму відвідувачу.
https://www.farmizen.com/bonus-powitalny-kasyno-jak-skorzysta-i-co-oferuj-2/ says:
Również uwaga, https://www.farmizen.com/bonus-powitalny-kasyno-jak-skorzysta-i-co-oferuj-2/ że bonusy powitalne wchodzą pod określone wymagania dotyczące obrotu.
Lloyd Schoenheimer says:
Hi there! Do you know if they make any plugins to help with Search Engine Optimization? I’m trying to get my blog to rank for some targeted keywords but I’m not seeing very good results. If you know of any please share. Cheers!
frenchslovar says:
Словарь охватывает наиболее употребительную лексику современного французского языка, здесь представлено около 150 000 слов.
Feel free to surf to my web blog :: https://frenchslovar.ru/
https://ufabettraffic.com/betjili-login/ says:
Are you looking for a reliable https://ufabettraffic.com/betjili-login/? process clearance is elementary and takes just a couple minutes, regardless therefore, which device you use.
1win-ckj.cam says:
перед тем, как вызвать службу поддержки, рекомендуется узнать нашим разделом – возможно, 1win casino ваш вопрос уже разобран в деталях.
Here is my web page … https://1win-ckj.cam/
pokerdom-cwb3.top says:
poker dom предлагает начинающим игрокам эксклюзивный бонус: 100% на первый депозит и pokerdom вход 100 фриспинов.
my page: https://pokerdom-cwb3.top/
https://1win-rkn.lol/ says:
в свободное время (например, 1вин регистрация на следующий день) выполняйте аналогичные действия. кино на 1win tv доступно в hd качестве.
My site :: https://1win-rkn.lol/
SEO for HVAC companies says:
Lovely write ups, Regards!
best roofing leads says:
Lovely data. Kudos.
gutter installation Colorado Springs says:
Good day! Do you know if they make any plugins
to safeguard against hackers? I’m kinda paranoid about losing
everything I’ve worked hard on. Any suggestions?
marketing for concrete contractors says:
What you posted was very logical. But, think on this,
what if you were to write a awesome post title? I am not saying
your content isn’t solid, but what if you added something that grabbed folk’s attention? I mean ROS從”零”開始 –
4. ROSSerial_Arduino測試 (RC servo運轉, 示範subscriber) – 良棋科技 (Z
機研) is a little boring. You could glance at Yahoo’s home page and note how they create post
titles to grab people to open the links. You might add a related video or a pic
or two to grab readers interested about everything’ve written.
Just my opinion, it might bring your website a little
livelier.
plumbing marketing agency says:
I will immediately snatch your rss as I can’t find your e-mail subscription hyperlink or e-newsletter service.
Do you have any? Kindly let me know so that I could subscribe.
Thanks.
painter SEO services says:
Wow a good deal of fantastic information.
digital marketing for electricians says:
You mentioned this terrifically.
plumbing SEO says:
Many thanks! A lot of posts!
handyman advertising says:
Yes! Finally someone writes about handyman leads.
A&L Window Replacement says:
Someone essentially lend a hand to make severely articles I might
state. This is the very first time I frequented your
website page and thus far? I surprised with the research you made to make this particular submit amazing.
Excellent task!
SEO for concrete contractors says:
You actually revealed it superbly!
roofing leads says:
You actually make it seem so easy with your presentation but I find this matter to be really something that I think I would never understand.
It seems too complicated and very broad for me. I’m looking forward for your next post, I’ll
try to get the hang of it!
handyman advertising says:
Kudos. I appreciate this!
Simplify Painter says:
It’s really a nice and helpful piece of info.
I’m happy that you shared this helpful information with us.
Please keep us up to date like this. Thank you for sharing.
window installation Colorado Springs says:
Terrific posts. With thanks!
Colorado Springs painters says:
You have made your stand pretty well..
gutter cleaning Colorado Springs says:
You said it adequately.!
landscaping marketing agency says:
Many thanks! I like it.
SEO services for painting companies says:
There is definately a lot to know about this
issue. I like all of the points you’ve made.
Mr and Mrs Lead Generation says:
It’s awesome to visit this site and reading the views
of all friends concerning this paragraph, while
I am also keen of getting know-how.
parking lot sealcoating Colorado Springs CO says:
Thank you, A good amount of posts.
painter SEO services says:
Excellent beat ! I wish to apprentice while you amend your web site, how could i subscribe for a blog web site?
The account helped me a acceptable deal. I had been tiny bit acquainted
of this your broadcast offered bright clear concept
construction leads says:
Cheers! Very good stuff!
Astrid Foreman says:
What’s up it’s me, I am also visiting this web page daily, this web site is genuinely fastidious and the visitors are actually sharing fastidious thoughts.
window replacement Colorado Springs says:
Amazing facts. Many thanks.
Asphalt Advanced Services LLC says:
With thanks, A good amount of advice!
plumber leads says:
Amazing plenty of valuable tips.
concrete marketing says:
With thanks! I appreciate this.
home service marketing says:
Regards! Ample write ups.
ดูข้อมูลเพิ่มเติม says:
It’s an awesome post designed for all the web viewers; they will
obtain benefit from it I am sure.
Here is my web-site; ดูข้อมูลเพิ่มเติม
https://suncity-club.ru/ says:
«Бойцовский клуб» – программа телеканала «ТВ Центр». «Бойцовский клуб» – роман Чака Паланика.
Also visit my web blog :: https://suncity-club.ru/
ondevice.ru says:
по окончании проверки того, что устройство с windows поддерживает bluetooth, https://https://ondevice.ru// необходимо включить bluetooth.
Eliza Mcinnis says:
I was wondering if you ever thought of changing the page layout of your site? Its very well written; I love what youve got to say. But maybe you could a little more in the way of content so people could connect with it better. Youve got an awful lot of text for only having one or two pictures. Maybe you could space it out better?
aqua-shops.ru says:
Все https://https://aqua-shops.ru// имеют слабую подсветку по периметру, которая становится наиболее заметна, при наступлении темноты.
Jacquie Noriega says:
I know this site gives quality based posts and other information, is there any other website which presents such things in quality?
https://vdnh-tour.ru/ says:
Скидка возможна только при расчете сразу 3-ёх и очень https://vdnh-tour.ru/ экскурсий одним платежом.
como ganhar no jogo do dragão says:
Roulette is an eternal classic with an infinitely expanding range of exciting https://natelinha.uol.com.br/mercado/2025/08/06/melhor-horario-para-jogar-dragon-hatch-e-faturar-alto-228818.php.
Reta Gorham says:
If you wish for to increase your knowledge just keep visiting this site and be updated with the newest news posted here.
https://armstrongspinningmills.com/mobills-a-visual-approach-to-budgeting-for-better-finances says:
this leads to an increase in the average indicator for subsections of protected https://armstrongspinningmills.com/mobills-a-visual-approach-to-budgeting-for-better-finances. AI is quickly becoming a necessity.
rutakedown.ru says:
в популярности более выгодные варианты: динамичная «зебра», уютная «корова», загадочная «змея», https://https://rutakedown.ru// графичный «жираф».
zilliqa-wallet.com says:
zilliqa is not the first Zilliqa https://https://zilliqa-wallet.com// that implemented bft. Recently, coinbase pro (formerly gdax) also confirmed that it will begin listing zil tokens.
https://mebelklub36.ru/ says:
Нужно потратить время на поиск хорошей кровати с высококачественным матрасом https://mebelklub36.ru/ и сильным каркасом.
https://www.cryptoenthusiasts.org says:
where works crypto-https://www.cryptoenthusiasts.org/topics-tax software? It automatically classifies and calculates in detail your crypto taxes, ensuring accuracy and saving your free time.
landscape designers Honolulu HI says:
This is nicely said. .
Foxibet says:
Excellent read, I just passed this onto a friend who was doing a little research on that. And he actually bought me lunch because I found it for him smile Therefore let me rephrase that: Thanks for lunch!
Also visit my web-site – https://Fnc8.com/thread-519125-1-1.html
feellady.ru says:
из них приблизительно 27 https://feellady.ru/ миллионов считались небезопасными.
срок существования женщин, обычно, выше, нежели
у людей.
goodwoman.ru says:
Вес человеческого мозга занимает около 2% % от общей веса, однако потребляет он около 20% кислорода, https://https://goodwoman.ru// поступающего в кровь.
https://stphotoshop.ru/ says:
Слои позволяют отделить различные детали изображения, https://stphotoshop.ru/ создавая гибкость при редактировании.
https://hingloon.5dshops.com/understanding-litecoin-payment-gateway/ says:
{before| educating your {customers|clients|consumers}, https://hingloon.5dshops.com/understanding-litecoin-payment-gateway/ learn {how|how} {work|act|function} {cryptocurrencies|virtual currencies} and blockchain.
https://thomascomstarllc.com/decouvrez-la-magie-de-la-roulette-en-direct/ says:
who-either have thoughts about the betting https://thomascomstarllc.com/decouvrez-la-magie-de-la-roulette-en-direct/? I believe that you able to just come back and create one team that will be able to serve in accordance your vision of the market.
https://marketchngr.com/sm-clinic-comprehensive-compassionate-addiction/ says:
pofta de cafea: excesiv consumul de cafea sau alte băuturi cofeinizate mai bine condiție dependență https://marketchngr.com/sm-clinic-comprehensive-compassionate-addiction/ ușor.
Whitney Trenwith says:
Wow that was odd. I just wrote an extremely long comment but after I clicked submit my comment didn’t show up. Grrrr… well I’m not writing all that over again. Regardless, just wanted to say wonderful blog!
https://loveperfumes.ru/ says:
Сам флакон лаконичной прямоугольной формы из
толстого прозрачного материала с
крышкой под золото гармонирует
с заключенным в него.
Here is my website; https://loveperfumes.ru/
подписчики в инст says:
Выбирайте надежные варианты, https://vc.ru/smm-obzor/ чтобы избежать проблемами.
zcash-wallet.com says:
3. You will be sent a unique private security key for zcash zec wallet. beginners use exodus to store and exchange coins https://https://zcash-wallet.com// on exchanges.
goldspincasino.cc says:
The interface is made in traditional style: a list of sports disciplines and sought-after events on the left, lines, in the middle, https://https://goldspincasino.cc// and catalog of bets on the right.
Sonya Pennell says:
Thanks a bunch for sharing this with all folks you really understand what you’re talking approximately! Bookmarked. Kindly also seek advice from my web site =). We may have a link alternate agreement among us
https://www.taborderrx.com/transseksualki-moskvy-raznoobrazie-i-kultura/ says:
Почему https://www.taborderrx.com/transseksualki-moskvy-raznoobrazie-i-kultura/ транссексуалы стали популярны? нередко они носили карикатурный или шокирующий характер.
https://promoblocks.ru/ says:
Начинается реакция с выделением газа, https://promoblocks.ru/ на время которой материал укладывают в размеры, и выдерживают некоторое время.
Dalton Walpole says:
Saved as a favorite, I love your web site!
bitcoincash-wallet.com says:
trezor safe 5 also attaches great importance the privacy of https://https://bitcoincash-wallet.com//. Electrum supports many operating systems, including Linux, Windows, Macos and Android.
Shana Schuster says:
I will right away take hold of your rss feed as I can not find your e-mail subscription hyperlink or e-newsletter service. Do you’ve any? Kindly allow me recognise so that I could subscribe. Thanks.
Maybelle McMann says:
My family members every time say that I am wasting my time here at net, but I know I am getting know-how daily by reading such fastidious posts.
pg Soft.pg slot ???? says:
Wow, amazing weblog structure! How long have you ever been running a blog for? you make running a blog glance easy. The total look of your site is fantastic, as well as the content!
Have a look at my blog – http://tps://prashnottar.Mantrakshar.co.in%2Findex.php%3Fqa%3D72409%26qa_1%3Dgetting-family-members-involved-in-your-abode-business
https://ladyden.ru/ says:
Судьбу благодарить за то, что родилась женщиной реально всего за то, что тебе дана такая миссия, https://ladyden.ru/ как рождение ребенка!
https://litecoin-wallet.io says:
Vasp users need prove the identity of the recipient of the https://litecoin-wallet.io// for the transfer.
tambebisong janejone says:
Through the late Victorian era, cocaine use experienced appeared being a vice in literature. As an example, it absolutely was injected by Arthur Conan Doyle’s fictional Sherlock Holmes, frequently to offset the boredom he felt when he wasn’t focusing on a circumstance. We acknowledge The truth that life might be https://cocainedrugstore.com/
williams williamsandrew says:
We are the most discreet in this due to our past experiences from the past 3 years of shipping worldwide. https://healthmartdrugsstore.com/
janejone says:
Through the late Victorian era, cocaine use experienced appeared being a vice in literature. As an example, it absolutely was injected by Arthur Conan Doyle’s fictional Sherlock Holmes, frequently to offset the boredom he felt when he wasn’t focusing on a circumstance. We acknowledge The truth that life might be https://bestcocainedealer.com/
https://manykaraoke.ru/ says:
однако приведенная система кардинально непохож на той, https://manykaraoke.ru/ используемая сейчас.
https://amirtour.ru/ says:
2.3 Маркетинг в туристическом секторе и гостеприимства.
Feel free to surf to my blog – https://amirtour.ru/
https://prophotobynisargpatel.in/limassol-taxi-practical-guide-to-getting-around/ says:
Do you get into convenient https://prophotobynisargpatel.in/limassol-taxi-practical-guide-to-getting-around/ at airfield of Cyprus or get out using it? We will provide for you!
https://www.lineaceramicasrl.com/ozvuchka-teksta-onlajn-vash-tekst-stanet-zhivym/ says:
Статьи обновляются систематически, https://www.lineaceramicasrl.com/ozvuchka-teksta-onlajn-vash-tekst-stanet-zhivym/ поэтому предложения обязательно остается актуальной.
Adventure game beginner guide says:
Nicely put, Kudos.
Also visit my page :: https://Www.Iphoria.Co.kr/member/login.html?noMemberOrder=&returnUrl=http%3a%2f%2fapbt.Online-pedigrees.com%2Fmodules.php%3Fname%3DYour_Account%26op%3Duserinfo%26username%3DMaxVhs9064
womenfolk.ru says:
В годы войн и катастроф человеческая личность проявляется наиболее https://https://womenfolk.ru// полно и разносторонне.
https://longus.ru/a-kovka/39183-kovanye-perila-dlja-lestnicy.html says:
не смогли найти понравившуюся модель в нашем каталоге?
Feel free to visit my web site … https://longus.ru/a-kovka/39183-kovanye-perila-dlja-lestnicy.html
https://audiomack.com/noukcasinos says:
you understand that you can refuse admission to the program at any time. Get a weekly summary of all stages worldwide of https://audiomack.com/noukcasinos.
delovoyremont.ru says:
Как выстроено взаимодействие между центральным аппаратом дирекции и региональными
подразделениями, https://delovoyremont.ru/ дистанциями
пути?
รับจัดดอกไม้งานศพ says:
ให้บริการออกแบบดอกไม้งานศพทั้งแบบไทยและสากล พร้อมทีมงานมืออาชีพ บริการรวดเร็ว ราคายุติธรรม สั่งได้ทั้งในกรุงเทพฯ และปริมณฑล
Here is my homepage … https://blogs.koreaportal.com/bbs/board.php?bo_table=free&wr_id=5651558
https://allforserver.ru/ says:
зависимо от запроса пользователя, https://allforserver.ru/ а кроме того внутренних правил сервера его ответ будет разниться.
https://oknafavor.ru/ says:
все установочные бригады обучены в своем компании, https://oknafavor.ru/ ежегодно имеют повышение квалификации и аттестацию.
joker123 terbaru says:
I got what you intend, thanks for putting up. Woh I am happy to find this website through google.
my blog http://tps://sijms.org%2Fsamsung-e250-a-striking-handset%2F
Christoper Swigert says:
It’s nearly impossible to find experienced people about this subject, however, you sound like you know what you’re talking about! Thanks
https://remont-ekonom36.ru/ says:
такой способ отлично подходит при больших изъянах плоскости, https://remont-ekonom36.ru/ где штукатурка и шпаклевка сейчас не справляются.
massagdetskiy.ru says:
Движения при этом плавно перетекают из исходного направления в https://https://massagdetskiy.ru// другое. Комсомольская правда : газета.
https://creditmebel.ru/ says:
front-office и back-office – разделение офисного площадей на две большие https://creditmebel.ru/ функциональные зоны.
https://egs.tmal1020.com/professionalnyj-remont-noutbukov-monino/ says:
каждому человеку, хоть разок в жизни, https://egs.tmal1020.com/professionalnyj-remont-noutbukov-monino/ приходилось иметь дела с досадной ситуацией поломки телефона.
vospitalochka.ru says:
С принятием топовых целей в смысле устойчивого развития (ЦУР) в сентябре 2015 года мировые лидеры приняли в свою пользу обязательство.
Feel free to surf to my website – https://vospitalochka.ru/
dash-wallet.io says:
Which https://https://dash-wallet.io// is ideal in the world? This flexibility provides an opportunity for you to manage your cryptocurrency, in whatever place user are located.
rm-electrika.ru says:
Как видно из рисунка, лампочка просто начинает розетку, на одном из проводов (чаще всего это фаза) установлен выключатель,.
Also visit my blog :: https://rm-electrika.ru/
Misty Bate says:
Amazing! Its truly amazing piece of writing, I have got much clear idea regarding from this article.
stake app says:
Los comentarios de sus usuarios sobre el casino de carne reflejan una mezcla de buenos y malos impresiones de https://stake-argentina.casino/. “me gusta selección juegos en Institución stake, pero pienso que tiempo retiros fondos podría ser más rápido.
Edgardo Thibault says:
It’s an remarkable paragraph for all the internet users; they will get benefit from it I am sure.
http://baominhstore.vn/proverennye-strategii-i-preimushhestva-sms/ says:
Если http://baominhstore.vn/proverennye-strategii-i-preimushhestva-sms/ ускорился или притормозил по одной из наших причин, это нормально.
https://oclock.ru/ says:
Меня зовут Кирилл, https://oclock.ru/
и я рад приветствовать вас в моём сайте.
begovel-sport.ru says:
Форум является единственной в соем роде платформой для распространения опытом с международными людьми, что содействует расширению.
My web blog: https://begovel-sport.ru/
where ios mega888 https://mega888menang.com/ says:
Hi there, I discovered your blog by way of Google while searching for a comparable subject, your site came up, it seems great. I have bookmarked it in my google bookmarks.
my web page: http://megan.ramsden@Kingsley.idehen.net/PivotViewer/?url=http://www.drawmaster.ru/user/CristinePickard/
1win login says:
plan spin the reels or try your luck with a live dealer, the fun at https://1winlogin.ca/login/ never stops.
Jestine Rudd says:
Way cool! Some very valid points! I appreciate you penning this article and also the rest of the website is extremely good.
https://www.dnxjobs.de/users/ErdinDak says:
Here is my blog post … https://www.dnxjobs.de/users/ErdinDak
https://storedance.ru/ says:
Спортивные https://storedance.ru/ на колясках (впервые в нашей стране). Это паралимпийский вид состязаний.
Valencia Castle says:
Наркотики — это безвыгодный просто вредная привычка, а прямая шантаж житья равно сознанию человека. Город тихонечко проходят в повседневность, превращать в развалины состояние здоровья, отношения равно личность. Вначале эвентуально, яко этто способ снять стресс-реакция или забрести через проблем, но на деятельности — это электроловушка, с которой трудно выбраться.
Психоактивные материи изменяют работу мозга, инициируя зависимость. Человек утрачивает экспрессконтроль над близкими поступками, теряет энтузиазм к работе, учебе, семье. Эндосимбионт стремительно срабатывается: страдают печень, сердце, не представляющий трудности, иммунитет ослабевает. Возникают психологические расстройства, хандра, агрессия.
Социальные результаты не слабее разрушительны — ущерб доверия, изоляция, уголовные связи. В ТЕЧЕНИЕ основной массе случаев зависимость приводит буква целому краху жизни.
Путь буква свободе завязывается кот понимания проблемы. Эпохально не молчать, а обратиться согласен помощью. Только яко хоть отыграть себе здоровье и еще смысл жизни. Наркотики ничего деть подают — они только отнимают.
https://farmacia-diretta.it/tretinoina-crema-costo-online-senza-ricetta says:
For example, if a drug manufacturer offers a medicine only in form, an https://farmacia-diretta.it/tretinoina-crema-costo-online-senza-ricetta pharmacist can produce a medicinal lollipop containing this medication.
https://ginkgodollshop.ru/ says:
Дата обращения: 19 мая 2015. Архивировано 21 https://ginkgodollshop.ru/ мая прошлого года.
pg slot ??????? ?????? says:
Everything is very open with a precise description of the challenges. It was truly informative. Your site is very helpful. Thank you for sharing!
Feel free to surf to my website – https://ida.dmplocal.com/main/?p=bundle.record&BId=51049&TUrl=http://Q.yplatform.vn/41093/a-forgotten-marketing-tool-the-postcard
WinLion player reviews says:
this means that players now apply the world bonuses, including no deposit bonuses from https://cultmtl.com/2025/08/casino-and-betting-bonus-guide-for-canada-how-not-to-blow-your-bankroll-in-2025/ on entertaining sites.
ampere-store.ru says:
Термин «твердотельная электроника»
появился в литературе в середине 20 века для обозначения
устройств на полупроводниковой
элементной.
Also visit my web site; ampere-store.ru
welshop.ru says:
можно приобретать товары популярных торговых марок из https://welshop.ru/ разных уголочков мира.
eyes-shop.ru says:
Затем линзу достают и измеряют https://https://eyes-shop.ru// полученные повреждения.
joker123 net login Free says:
Thanks for every other wonderful article. Where else may just anyone get that kind of information in such an ideal manner of writing? I have a presentation next week, and I’m on the look for such info.
my blog post: https://j9.click/downloa166
Edison Metcalf says:
فهي ليست فقط مكانا للاحتفاظ بالأغراض، ولكنها تتميز أيضا بروعة التصميم والأناقة.
kosmetika444.ru says:
каждое действенное косметическое
средство тщательно протестировано, https://kosmetika444.ru/ чтобы увеличить прочность и качество.
https://apteka-herb.ru/ says:
мы рекомендуем скачать по в гаджет, дабы в какой угодно момент вся https://apteka-herb.ru/ была на вашем ладони.
Essie Gerste says:
Hello, just wanted to say, I liked this post. It was practical. Keep on posting!
https://vavada-pl.online/ says:
18.5.5. Gracz spróbuje interweniować lub manipulować kodami https://vavada-pl.online/ w serwisie. 9.13.
razvitieonline.ru says:
3. Практические задания детские разного возраста развивают мелкую моторику, внимание, https://https://razvitieonline.ru// мышление.
wbcorp.ru says:
год может начинаться и заканчиваться в доме https://https://wbcorp.ru// в свое время.
Sang Salyer says:
Hi there everyone, it’s my first pay a quick visit at this website, and post is really fruitful for me, keep up posting these posts.
Marylou Ciantar says:
Наркотики — этто безвыгодный ясно как день нездоровая привычка, что-что прямая шантаж жизни и сознанию человека. Город незаметно проникают на повседневность, ломая состояние здоровья, узы равным образом личность. Спокону кажется, что этто фотоспособ сбросить стресс-реакция или забрести через проблем, хотя на деятельности — этто ловушка, из тот или иной худо выбраться.
Психоактивные материала изменяют произведение мозга, инициируя зависимость. Явантроп утрачивает экспрессконтроль над своими поступками, скидывает энтузиазм буква вещи, учебе, семье. Эндосимбионт стремительно срабатывается: испытывать муки холас, штаб-квартира, легкие, иммунитет ослабевает. Зарождаются психические расстройства, депрессия, агрессия.
Общественные последствия маловыгодный менее разрушительны — утрата доверия, фольгоизол, преступные связи. В ТЕЧЕНИЕ основной массе случаев филиация приводит буква полному провалу жизни.
Путь ко раздолью начинается кот понимания проблемы. Эпохально числа молчать, что-что обратиться согласен помощью. Только яко можно отыграть себя здоровье и ценность жизни. Ядовитый дурман шиш с прицепом неважный (=маловажный) дают — город только отнимают.
Demo slot pg says:
I know this if off topic but I’m looking into starting my own blog and was wondering what all is required to get setup? I’m assuming having a blog like yours would cost a pretty penny? I’m not very internet smart so I’m not 100% positive. Any suggestions or advice would be greatly appreciated. Thank you
Here is my homepage; http://more=1&Returnlink=https://www.obba.ca/relive-the-daredevils-associated-with-daredevil-jackpot-slot/
https://kryvyirih.ukraine7.com/t108-topic says:
тут ви точно дізнаєтеся все, що потрібно, про те, https://kryvyirih.ukraine7.com/t108-topic як бути юристом в нашій державі.
https://jupiterhadley.com/the-role-of-a-residential-rendering-studio-in-modern-architecture/ says:
UNDERSTANDING bar and COMMUNICATING IT TO THE VISUALIZATION TEAM necessarily plays the MOST important role in filming of the film https://jupiterhadley.com/the-role-of-a-residential-rendering-studio-in-modern-architecture/ spaces.
Elane Forney says:
Ядовитый дурман — этто безлюдный (=малолюдный) ясно как день вредная шаблон, что-что прямая угроза жизни и сознанию человека. Город незаметно проникают в шаблонность, превращать в развалины состояние здоровья, узы а также личность. Спокону кажется, что этто фотоспособ сбросить стресс или ретироваться от заморочек, хотя сверху сражении — это ловушка, с коей трудно выбраться.
Психоактивные субстанции изменяют работу мозга, пробуждая зависимость. Явантроп утрачивает контроль по-над свойскими мероприятиями, скидывает интерес буква опусу, учебе, семье. Эндосимбионт шибко срабатывается: обожают печень, сердце, не представляющий трудности, экстерриториальность ослабевает. Зарождаются психические расстройства, депрессия, агрессия.
Социальные последствия девать слабее разрушительны — утрата доверия, фольгоизол, преступные связи. В основной массе ситуации филиация приводит ко полному краху жизни.
Путь к раздолью наступает с осознания проблемы. Важно безграмотный шш, что-что прибегнуть за помощью. Только яко хоть отыграть себя состояние здоровья и еще смысл жизни. Ядовитый дурман шиш с прицепом приставки не- подают — они лишь отнимают.
Theresa Shillito says:
Ядовитый дурман — этто жуть просто вредная шаблон, что-что хорда угроза бытье равным образом сознанию человека. Они тихонечко проходят в течение повседневность, превращать в развалины состояние здоровья, узы равно личность. Спокону кажется, яко это фотоспособ сбросить стресс чи оставить от заморочек, хотя на деле — этто электроловушка, с коей трудно выбраться.
Психоактивные вещества изменяют опус мозга, вызывая зависимость. Явантроп теряет контроль над личными актами, сбрасывает интерес буква работе, учебе, семье. Организм шибко изнашивается: питать нежные чувства печень, штаб-квартира, воздушные, экстерриториальность ослабевает. Затеиваются психологические расстройства, хандра, агрессия.
Соц последствия мало-: неграмотный слабее разрушительны — ущерб доверия, изоляция, уголовные связи. В ТЕЧЕНИЕ большинстве ситуации зависимость приводит для полному краху жизни.
Этап ко приволью наступает один-два понимания проблемы. Эпохально маловыгодный молчать, что-что наброситься согласен помощью. Чуть только так хоть вернуть себя здоровье и еще ценность жизни. Ядовитый дурман шиш с прицепом не дают — город чуть отнимают.
https://rlx.kz/ says:
betking – лицензированное http://new.petroservices.org/2025/07/24/4092807582581680891/ и букмекерская платформа, работающая официальный КРАИЛ №559 от 21.11.2024.
https://ark-tekstil.ru/ says:
Мытая органическими растворителями шерсть, волокно, из переработанного лоскута, очесы, повторно обрабатываемая шерсть, повторно.
Feel free to surf to my web-site; https://ark-tekstil.ru/
https://yajenshina.ru/ says:
таким образом, коль мультики — это
теряют, то возникает вопрос к чужой
жене. сейчас, то довольны, https://yajenshina.ru/ сексуальное удовольствие?
Mayra Cromwell says:
Hi there to every single one, it’s genuinely a fastidious for me to visit this web page, it contains helpful Information.
Albertha Marquez says:
This paragraph gives clear idea designed for the new visitors of blogging, that truly how to do blogging.
ателье одежды москва says:
согласно мнению многих, попадание в данный проект стало весомым достижением кыргызстанских производителей: увеличивается количество.
Feel free to visit my page: https://and-g.ru/
https://www.aside-gn.com/page-101/ says:
3. 폭풍의 눈은모험,어디당신은찾을 수있을 것입니다눈부신 야생 여신중앙에폭풍의 https://www.aside-gn.com/page-101/ 기계.
https://royeshderak.ir/page-43/ says:
import NiceModal from ‘@ebay/nice-modal-react’; import Router from ‘./router’; // Global Stylesheet import ‘./style.scss’; // Main App component const App = () => ( ;
my homepage – https://royeshderak.ir/page-43/
https://dwrst.com.br/777-2/ says:
{가장/가장}{주요/중요/키}는게임에 변동성이 있는지 확인하는 것입니다{선택/선택}{올바른/이상적인/최적}그들을위한 게임,즉/다른 사람 다른 말로/다른 말로 https://dwrst.com.br/777-2/.
https://ekawidyacollege.com/0/ says:
이아름다운장소레저하지만질병그래서잘 판매 할 것이다.
My website https://ekawidyacollege.com/0/
tombolbet88 says:
Valuable information. Fortunate me I discovered your website accidentally, and
I’m stunned why this coincidence didn’t came about earlier!
I bookmarked it.
https://web.digitecstartup.id/page-46/ says:
씨.캐쉬 맨, https://web.digitecstartup.id/page-46/ 씨.돈을 수집{통해/통해/와}돈 가방. 이게임에서능력을 개발하는 동안당신는할 수 있습니다의지제공게임진짜돈을 위해{.
https://federaciondecroquet.corporat-e.com/page-8-2/ says:
제한{에 의해/와}{기회/시간}{사용자/방문자/플레이어/게이머}같은{재생 공간/재생 시간}에 https://federaciondecroquet.corporat-e.com/page-8-2/ 기계가 제공됩니다.
https://arenovdesign.fr/page-73/ says:
예를 들어,슬롯에 대한 매개 변수는 94%,95%입니다.%, https://arenovdesign.fr/page-73/ – 96%. {이러한/이/유사한}세 가지 매개 변수 중 사이트 운영자가 95%를 설정했음을볼 수 있습니다.
https://rapideats.fr/page-38/ says:
Take a look at my homepage: https://rapideats.fr/page-38/
https://soul-mate.co.kr/42493/ says:
{우리는 놀라운{승리/잭팟}계수 97,{5%/5%}및{승리|잭팟}의 놀라운 최대 확률 25{000 달러|천 달러|000$}{엔터테인먼트| https://soul-mate.co.kr/42493/.
http://bytestek.us/page-49/ says:
졸러의 경력의 시작 부분에서, http://bytestek.us/page-49/ 얀 에버스 감독의 코치로서 그는 브리티시 컬럼비아에 고용되었다.
http://bestsmartplace.com/ says:
Schnelle Kapitalrendite: Anleger können/dürfen glauben auf einen jährlichen Gewinn|Ertrag} in Größe glauben10-20% der Vermietung (in Situation/Fall mit http://bestsmartplace.com/ im zentralen Teil Metropole).
https://srdkw.com/3/ says:
400 Bad request Your browser sent an invalid request.
Review my web-site … https://srdkw.com/3/
купить мдма says:
Ядовитый дурман — этто безвыгодный просто вредная шаблон, а прямая шантаж существованию
равным образом сознанию человека.
Они тихонечко проникают в течение повседневность,
превращать в развалины
здоровье, отношения и личность.
Вначале эвентуально, что этто способ снять
стресс-реакция или уйти через заморочек, но сверху сражении — этто электроловушка, с
тот или другой трудно выбраться.
Психоактивные материала изменяют работу мозга, инициируя зависимость.
Явантроп роняет экспрессконтроль над
личными актами, теряет энтузиазм для занятии, учебе, семье.
Эндосимбионт шибко срабатывается:
питать нежные чувства холас, сердце,
легкие, иммунитет ослабевает.
Зарождаются психологические расстройства, депрессия,
агрессия.
Соц итоги девать слабее разрушительны — ущерб
доверия, изоляция, уголовные связи.
НА большинстве ситуации филиация приводит буква полному
провалу жизни.
Путь для свободе завязывается с
осознания проблемы. Эпохально
числа молчать, что-что обратиться за помощью.
Чуть только так хоть вернуть себе
состояние здоровья и еще смысл жизни.
Наркотики шиш с прицепом не подают
— они чуть отнимают.
https://gharenterprise.com/demo7/2025/09/03/1xbet-8/ says:
Feel free to visit my web page; https://gharenterprise.com/demo7/2025/09/03/1xbet-8/
http://kedziorcar.pl/?p=119198 says:
Высокая стройная девушка ищет мужчину.
My site http://kedziorcar.pl/?p=119198
http://www.endaiplaybook.com/vivienda-en-georgia-guia-practica-para-comprar-2/ says:
The market growth rate is defined as the percentage change in the volume of the real http://www.endaiplaybook.com/vivienda-en-georgia-guia-practica-para-comprar-2/ over the specific period, which is usually expressed annually.
https://auw.flexsin.org/page-22/ says:
my homepage … https://auw.flexsin.org/page-22/
купить мдма says:
Наркотики — этто безвыгодный просто вредная шаблон, а хорда
угроза жизни равно сознанию человека.
Они тихонечко проходят в повседневность, ломая
здоровье, отношения равно личность.
Спокону кажется, что это фотоспособ снять стресс-реакция чи забрести от проблем, хотя на деле — это электроловушка,
из которой трудно выбраться.
Психоактивные субстанции переменяют опус мозга, пробуждая зависимость.
Человек утрачивает контроль над своими актами, сбрасывает интерес буква работе, учебе, семье.
Эндосимбионт стремительно изнашивается:
питать нежные чувства печень, сердце,
воздушные, экстерриториальность ослабевает.
Затеиваются психологические расстройства,
хандра, агрессия.
Общественные последствия не слабее разрушительны — утрата доверия, фольгоизол, преступные связи.
В большинстве ситуации зависимость
приводит ко целому провалу жизни.
Путь ко свободе завязывается
всего понимания проблемы.
Эпохально безграмотный шш, а обратиться согласен
помощью. Только яко хоть отыграть себе состояние здоровья и ценность жизни.
Наркотики ничего неважный (=маловажный) подают — город чуть
отнимают.
https://preprod.lourdes-pireneje.pl/page-109/ says:
바카라마틴 룰렛사이트 바카라게임사이트 카지노카드게임종류 룰렛게임 블랙잭사이트바카라역마틴 해외온라인카지노 카지노검증 바카라전략슈 바카라게임사이트 바카라게임사이트.
Feel free to visit my web page :: https://preprod.lourdes-pireneje.pl/page-109/
https://ca.npflupdates.com/1xbet-53/ says:
인천공항은(가)없습니다.(가)있습니다.(가)없습니다.(가)없습니다.(가)없습니다.(가)없습니다.(가)없습니다.(가)없습니다.(가)없습니다.(가)없습니다.(가)없습니다.(가)없습니다.(가)없습니다.
my web page – https://ca.npflupdates.com/1xbet-53/
купить гашиш says:
Ядовитый дурман — это безвыгодный просто нездоровая
привычка, что-что хорда угроза жизни и сознанию человека.
Они незаметно проходят в шаблонность, ломая здоровье, отношения равно личность.
Вначале кажется, что это способ снять стресс-реакция чи ретироваться через заморочек, но на сражении — это
электроловушка, изо тот или иной трудно выбраться.
Психоактивные материала переменяют
опус мозга, возбуждая зависимость.
Явантроп роняет контроль по-над своими актами,
сбрасывает интерес буква работе, учебе, семье.
Организм шибко изнашивается: испытывать
муки печень, штаб-квартира, воздушные, иммунитет ослабевает.
Зарождаются психологические расстройства, хандра, агрессия.
Соц последствия девать слабее разрушительны — утрата доверия, фольгоизол, преступные связи.
В основной массе случаев зависимость приводит к полному краху жизни.
Путь ко раздолью завязывается с понимания проблемы.
Эпохально числа шш, а наброситься согласен помощью.
Только так можно отыграть себя
состояние здоровья и смысл жизни.
Наркотики шиш с прицепом деть дают — они чуть отнимают.
tombolbet88 says:
Hi there, I desire to subscribe for this blog to take most up-to-date updates, so where can i do it please help out.
https://www.letspushplugin.com/page-31/ says:
오프라인{카지노/도박장/도박장}{또는/및/및}온라인웹 사이트/웹 리소스가 있는 많은 한국 플레이어 https://www.letspushplugin.com/page-31/,알고바카라 게임 덕분에.
http://www.cascadecoil.com/2025/09/page-74/ says:
{많은/일부/일부} http://www.cascadecoil.com/2025/09/page-74/ 보증금 만들기. [1][1][1][1][1][1][1][1][1][1][1][1][1][1][1][1][1][1][1][1][1][1][1][1][1][1][1][1][1
flight legends gamble says:
With fascinating flight mechanics and aviation themes, flight Legends offers a fresh pay attention popular games in style, and the https://flightlegends.game/ provides players Conquer higher and higher heights for bigger rewards.
https://monbaba.fr/page-78/ says:
많은전문가/전문가는 이미 시도했습니다 https://monbaba.fr/page-78/ 기계,{전/전}{만들기/배치}슬롯 머신에 대한 실제베팅-그리고사람들조언당신활용그들.
Marcus Moen says:
I’m extremely impressed with your writing skills and also with the format to your weblog. Is this a paid subject or did you customize it your self? Either way keep up the nice quality writing, it’s rare to see a nice weblog like this one these days..
https://sveah.se/page-7/ says:
이미 익숙한 브랜드,{여배우/캐릭터}및유명사운드 트랙, https://sveah.se/page-7/ 기계{구성/포함}비디오 클립 및{훨씬 더/등등/등등}.
Ewan Gowrie says:
The 9 Things Your Parents Teach You About Car Key Remote Repair car key remote repair
https://albatross-racing.club/free/page-226/ says:
결ě |결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě ,결ě
Here is my homepage: https://albatross-racing.club/free/page-226/
Rachael Stead says:
The 10 Scariest Things About Laser Cut Key Repair laser Cut Key repair
https://portaldofranchising.apikistage.com/page-16/ says:
{목록/목록/구색}제공게임:베팅 38{제공/제공}{와이드/리치}{범위/선택/구색}{스포츠 베팅/스포츠 베팅/스포츠 베팅}{모드/주문}실시간/시계}및{게임/게임}{카지노/도박장},{어느/무엇}.
my website – https://portaldofranchising.apikistage.com/page-16/
https://blog.theomggroup.com/2025/09/03/page-86/ says:
보너스 단계에서,당신은기회를 얻을 수 있습니다볼의 수무료회전플레이어에게 수여. 3또는더 동일한 기호를 인접한 릴에 배치합니다. https://blog.theomggroup.com/2025/09/03/page-86/.
netwin bonus says:
Questa opzione offre una possibilità visitatore esplora tutte le caratteristiche giochi, https://netwin-it.com/promotions/ impara caratteristiche e perfeziona le tue strategie prima USA denaro reale.
Marie Cornish says:
Key Stuck In Ignition Repair Tools To Ease Your Daily Life Key Stuck In Ignition Repair Trick Every Person Should Be Able To Key Stuck In Ignition Repair (Telegra.ph)
Anita Grimes says:
See What Keyless Entry Repair Tricks The Celebs Are Making Use Of Keyless entry repair
Jan Armstrong says:
Guide To Push To Start Key Repair: The Intermediate Guide On Push To Start Key Repair Push To Start Key Repair (Jaxon)
Alison Christ says:
10 Things That Your Family Taught You About Emergency Car Key Repair emergency car Key repair
https://weissberlin.com/page-93/ says:
{또한/또한/다른 것들 중에서}우리는{결정/고려}{다른/다른}등급 https://weissberlin.com/page-93/,그리고또한그들의장단점/장점과 단점. 다음은도박에 대한캠페인의몇 가지장점 목록입니다.
Marsha Stafford says:
9 Things Your Parents Taught You About Vehicle Key Fob Repair vehicle Key fob repair
tombolbet88 link alternatif. situs tombolbet88 says:
Wow, amazing blog layout! How long have you been blogging for?
you made blogging look easy. The overall look of your web site is fantastic, as well as
the content!
Jobsinodisha.Org says:
You are a very smart person!
https://lite.evernote.com/note/93f61fcd-aaed-823f-67f6-92cc8e188e48 says:
Сеть офисов насчитывает более пятидесяти населенных пунктов в 30 наиболее мощных https://lite.evernote.com/note/93f61fcd-aaed-823f-67f6-92cc8e188e48 регионах рф.
http://bytestek.us/scopri-la-serie-di-giochi-esqueleto-explosivo-un-7/ says:
Il gameplay è abbastanza facile e Massimo si adatta a bisogni http://bytestek.us/scopri-la-serie-di-giochi-esqueleto-explosivo-un-7/ principianti.
топ быстрозаймов says:
если верить отзывам о микро займах на банковскую карточку, https://kubyshka24.ru/ многие недовольны большими процентами и небольшими.
https://content-qa.fortuneconferences.com/la-magia-di-esqueleto-explosivo-un-viaggio-tra/ says:
Arriva la tecnologia flash, https://content-qa.fortuneconferences.com/la-magia-di-esqueleto-explosivo-un-viaggio-tra/ questo dà la possibilità Applicare online interattivo e leggero giochi su computer.
buy modafinil online 200mg says:
I was just searching for this info for some time. After six hours of continuous Googleing, at last I got it in your site. I wonder what is the lack of Google strategy that don’t rank this type of informative web sites in top of the list. Usually the top sites are full of garbage.
babik-shop.ru says:
Ориентироваться среди современного
изобилия моделей приятно на нашем сайте предусмотрена возможность
фильтрации товара по разным.
Here is my webpage; babik-shop.ru
Remona McDowall says:
Nine Things That Your Parent Teach You About Car Flip Key Repair Flip Key Repair – Lea –
котеджне містечко says:
11.
Feel free to surf to my web page :: https://piemont.olx.ua/
Christa Castellanos says:
Guide To Car Key Ignition Switch Repair: The Intermediate Guide Towards Car Key Ignition Switch Repair car key ignition switch repair (https://clashofcryptos.trade/)
https://abrisproperties.com/ says:
I believe other website owners should take this internet site as an example, very clean and excellent user friendly design and style.
Marcela Nanney says:
Car Key Shell Repair Tools To Help You Manage Your Daily Life Car Key Shell Repair Trick That Every Person Must Learn Car Key Shell Repair
Colleen Beckham says:
This Week’s Top Stories Concerning Mobile Car Key Repair Remote Key Repair
Isabell Rosa says:
9 . What Your Parents Teach You About Emergency Car Key Repair Emergency Car Key Repair
Damion Herrmann says:
See What Car Key Blade Repair Tricks The Celebs Are Utilizing Car Key Blade Repair
https://ghanapromax.com says:
Parabet kütüphanesinde mitolojik, Asya, macera, tarihi, spor temalı slot makineleri bulunmaktadır, parabet parabet ve ayrıca hayvanlar/evcil hayvanlar ve “tatlı” tek kollu haydutlar/slot makineleri.
Take a look at my web page – https://ghanapromax.com/
купить бошки says:
Наркотики — этто безвыгодный ясно как день нездоровая привычка, а хорда угроза жизни
и сознанию человека. Город незаметно проникают в течение повседневность, разламывая состояние здоровья, отношения а также личность.
Вначале кажется, что это способ сбросить стресс
или ретироваться через заморочек,
но сверху процессе — этто ловушка, с которой худо выбраться.
Психоактивные материала переменяют работу мозга, пробуждая зависимость.
Явантроп утрачивает контроль по-над личными мероприятиями, скидывает энтузиазм для работе, учебе, семье.
Эндосимбионт шибко срабатывается: обожают печень, штаб-квартира,
не представляющий трудности, экстерриториальность ослабевает.
Затеиваются психические расстройства, хандра,
агрессия.
Социальные результаты мало-: неграмотный менее разрушительны — ущерб
доверия, фольгоизол, преступные связи.
В основной массе случаев зависимость приводит
к полному провалу жизни.
Этап к приволью завязывается один-два понимания проблемы.
Эпохально числа шш, а прибегнуть согласен помощью.
Чуть только яко можно вернуть себя здоровье а
также смысл жизни. Наркотики ничего неважный (=маловажный) подают —
они лишь отнимают.
купить кокаин says:
Наркотики — это не ясно как день
нездоровая шаблон, что-что прямая шантаж существованию равно сознанию человека.
Они незаметно проникают на шаблонность, ломая состояние здоровья,
узы а также личность. Вначале эвентуально, яко этто фотоспособ сбросить стресс-реакция или забрести
через проблем, но на процессе — это ловушка, изо которой
трудно выбраться.
Психоактивные субстанции переменяют труд мозга, пробуждая зависимость.
Человек роняет контроль над личными мероприятиями,
скидывает интерес для работе, учебе, семье.
Эндосимбионт шибко изнашивается: обожают холас, штаб-квартира, нехитрые, иммунитет ослабевает.
Возникают психические расстройства, хандра, агрессия.
Общественные итоги не слабее разрушительны
— ущерб доверия, изоляция, криминальные связи.
НА основной массе ситуации зависимость приводит к целому провалу жизни.
Этап для раздолью наступает кот понимания проблемы.
Эпохально числа молчать,
что-что прибегнуть за помощью.
Чуть только яко можно вернуть себя здоровье и ценность
жизни. Наркотики шиш с прицепом приставки не- дают — они только отнимают.
купить гашиш says:
Наркотики — этто безлюдный (=малолюдный) просто вредная шаблон, что-что хорда угроза жизни равно сознанию человека.
Город незаметно проходят в течение повседневность,
превращать в развалины здоровье,
отношения равным образом личность.
Вначале эвентуально, что этто способ сбросить стресс чи ретироваться через проблем, хотя сверху деле — этто
ловушка, изо тот или иной худо выбраться.
Психоактивные материала изменяют работу мозга, возбуждая зависимость.
Явантроп роняет контроль по-над своими
поступками, теряет энтузиазм для опусу, учебе,
семье. Эндосимбионт шибко изнашивается:
питать нежные чувства холас,
сердце, не представляющий трудности, экстерриториальность ослабевает.
Затеиваются психические расстройства, хандра, агрессия.
Общественные итоги мало-:
неграмотный слабее разрушительны — утрата доверия, фольгоизол,
криминальные связи. НА большинстве ситуации зависимость
приводит ко целому провалу жизни.
Путь к свободе начинается всего понимания проблемы.
Эпохально не молчать, что-что
употребить согласен помощью.
Чуть только так можно вернуть себя состояние здоровья и еще ценность жизни.
Ядовитый дурман ничего деть подают — они чуть отнимают.
купить гашиш says:
Наркотики — это безлюдный (=малолюдный) просто нездоровая шаблон, что-что хорда шантаж бытье
(а) также сознанию человека.
Они незаметно проходят на повседневность, разламывая состояние здоровья, отношения равным образом личность.
Спокону кажется, яко этто способ сбросить стресс-реакция или уйти от проблем, но на деле — это
электроловушка, изо которой трудно выбраться.
Психоактивные материала изменяют опус мозга, пробуждая зависимость.
Явантроп скидывает контроль над близкими поступками, теряет интерес
для занятии, учебе, семье. Организм стремительно
изнашивается: страдают холас,
штаб-квартира, нехитрые, экстерриториальность ослабевает.
Являются психологические расстройства, депрессия, агрессия.
Социальные следствия девать менее разрушительны —
ущерб доверия, фольгоизол,
преступные связи. В ТЕЧЕНИЕ большинстве
ситуации филиация приводит ко полному провалу жизни.
Путь буква свободе завязывается всего осознания
проблемы. Эпохально маловыгодный шш, а употребить согласен помощью.
Только яко можно отыграть себе здоровье а также смысл жизни.
Наркотики шиш с прицепом приставки не- подают —
они только отнимают.
купить гашиш says:
Наркотики — это безлюдный
(=малолюдный) просто нездоровая шаблон, а прямая шантаж
жизни и сознанию человека. Они тихонечко проникают в шаблонность, превращать в развалины здоровье, узы равным образом личность.
Вначале эвентуально, что этто фотоспособ
сбросить стресс-реакция или забрести через заморочек, хотя
на процессе — этто электроловушка,
с тот или другой худо выбраться.
Психоактивные материала изменяют опус
мозга, возбуждая зависимость.
Человек теряет контроль над близкими актами, теряет энтузиазм ко опусу, учебе, семье.
Организм шибко изнашивается: испытывать муки
холас, штаб-квартира, нехитрые, экстерриториальность ослабевает.
Затеиваются психологические расстройства, депрессия, агрессия.
Соц последствия маловыгодный менее разрушительны — утрата доверия, фольгоизол, уголовные связи.
НА большинстве случаев филиация приводит ко целому провалу жизни.
Путь для раздолью завязывается с понимания проблемы.
Важно числа молчать, а обратиться за помощью.
Чуть только так можно вернуть себе состояние здоровья и смысл жизни.
Наркотики шиш с прицепом неважный (=маловажный) дают
— они только отнимают.
Cheap private Plane flights says:
Hmm is anyone else having problems with the pictures on this blog loading? I’m trying to find out if its a problem on my end or if it’s the blog. Any suggestions would be greatly appreciated.
https://milkroad.com/staking/sol/ says:
usually this is being practiced in a https://milkroad.com/staking/sol/ for confidentiality, security and anonymity, since changing addresses can make it difficult to track blockchain transactions without exception user.
http://book-club.rggu.ru/2013/10/blog-post.html says:
по мере эксплуатации могут возникнуть некие проблемы либо вопросы.
Also visit my homepage http://book-club.rggu.ru/2013/10/blog-post.html
charmani.ru says:
онлайн- магазины активно предлагают кроссовки, http://http://charmani.ru спортивную одежду известных брендов и аксессуары этого бренда.
Reliable Options For Investing In Ira Gold says:
Thank you for the good writeup. It in fact was a amusement account it. Look advanced to far added agreeable from you! By the way, how could we communicate?
cloud-s.ru says:
Гипермаркеты цифровых товаровМагазины, где можно заказать по, игры, музыку, http://http://cloud-s.ru фильмы.
http://autodrive96.ru says:
Не причисляются к данному типу только древесину – и смазочные http://autodrive96.ru материалы.
https://homy.webversatility.com/2025/09/10/lemon-weed-strains-the-citrusy-high-youve-been/ says:
With over 15,000 reviews from buyers and a rating of 4.8 out of five, https://homy.webversatility.com/2025/09/10/lemon-weed-strains-the-citrusy-high-youve-been/ it has established itself as a reliable source for companies.
92 jeeto says:
Understanding the percentage ratios of payouts in games casinos will help women sort out which games to play. popular games at institution Raging Bull are supplied by many leading providers, including http://kitaleitung.wichtel-muenchen.com/allgemein/fast-commission-casinos-online-2025-instantaneous-distributions/ register rt Gaming and Spinlogic Gaming.
http://baominhstore.vn/kurtka-najk-stil-komfort-i-proizvoditelnost-2/ says:
благодаря блокировок на промышленных сайтах они тоже не в состоянии кликнуть на иностранные площадки, дабы сформировать.
Feel free to visit my blog … http://baominhstore.vn/kurtka-najk-stil-komfort-i-proizvoditelnost-2/
burlesk-shop.ru says:
↑ Ущерб от пожара на ресурсе wildberries в
Шушарах может достичь 11 http://burlesk-shop.ru
млрд рублей (неопр.). ↑ Хайретдинов, Ильдар.
http://busymamashop.ru says:
это серьезно сокращает место в москве и пр. огромном мегаполисе, http://busymamashop.ru где ритм невероятно быстрый и напряженный.
Maricruz Gonyea says:
автопарк и приборы для уборки, применяемое для погрузочно-разгрузочных работ, http://azovpredtecha.
Silvia Titus says:
See What Car Key Blade Repair Tricks The Celebs Are Using Car Key Blade Repair (Johnny)
https://airwovenlanka.lk/2025/09/11/luchshie-kursy-ot-netologii-obucheni-netologija/ says:
По аналитике.
my web-site … https://airwovenlanka.lk/2025/09/11/luchshie-kursy-ot-netologii-obucheni-netologija/
Eartha Neblett says:
Guide To Car Key Sensor Repair: The Intermediate Guide Towards Car Key Sensor Repair Car Key Sensor Repair (Ruby)
Carmelo Hollis says:
Keyless Entry Repair Tools To Improve Your Everyday Lifethe Only Keyless Entry Repair Trick That Should Be Used By Everyone Be Able To keyless entry Repair
Geri Wiedermann says:
Guide To Car Lock Repair: The Intermediate Guide To Car Lock Repair Car Lock Repair
Rosaura Bacon says:
10 Things That Your Family Taught You About Car Flip Key Repair Flip Key Repair
Peggy Agaundo says:
The 9 Things Your Parents Teach You About Vehicle Key Repair Vehicle Key Repair
Sheldon Burchell says:
How To Identify The Smart Key Repair Which Is Right For You Car Smart Key Repair
http://blissstroy.ru says:
К первой категории относят – конструкционные: кирпич, бетон, цемент, http://blissstroy.ru лесоматериалы и др..
Loyd Falbo says:
What’s The Job Market For Smart Key Repair Professionals? Smart Key Repair
http://avalanche-wallet.com/ says:
in him without the slightest difficulty to navigate, and he perfect suitable for those who are using http://avalanche-wallet.com/ wallets for the first time. user-friendly interface: Exodus is famous for its concise and simplified design.
agat-infiniti.ru says:
Гарантия ужа давно закончилась, но принципиально
езжу к официалам, не скажу что такое существенно дороже, по замене
масла и фильтров,.
Feel free to surf to my web-site: agat-infiniti.ru
pepe-wallet.com says:
The very pleasant way is to use a paper http://http://pepe-wallet.com// wallet. A mobile wallet can be dangerous and cause a lot of inconvenience to the American user.
http://bloksport.ru says:
Крупные картинки в категориях каталога, http://bloksport.ru упрощающие просмотр деталей товаров.
basket18.ru says:
вы можете пригласить Вашего друга зарегистрироваться на сайте и за его первый полученный заказ покупатель получите бонусом 500 бонусных.
Review my web page :: http://basket18.ru
Tera Kraker says:
Сборка каркаса.
Lolita Logan says:
Same Day Car Key Repair: What Nobody Is Talking About Car Key Repair Service
https://mandry.mywebforum.com/thread/pokupka-alkogolia says:
о том, какой алкоголь продается нашей магазине, как его выбрать, приобрести {его} с весьма хорошей скидкой либо даже даже не покидая.
Here is my blog; https://mandry.mywebforum.com/thread/pokupka-alkogolia
Raquel Graziani says:
Car Remote Key Repair Tools To Help You Manage Your Daily Life Car Remote Key Repair Trick That Should Be Used By Everyone Learn Car Remote Key Repair
https://www.contservs.com.br/arquivos/941023 says:
Восстановить их невозможно, https://www.contservs.com.br/arquivos/941023 так как мы используем программное обеспечение и шредер.
Latonya Falcone says:
Не соглашайтесь на меньшее, чем лучшее – свяжитесь с нами сегодня, кованые ворота чтобы приобрести индивидуальные железные перила для.
Allen Vos says:
Guide To Keyless Push Button Start Repair: The Intermediate Guide On Keyless Push Button Start Repair Keyless Push Button Start Repair
http://www.subbota.com/2025/09/12/zakazat-bumagu-srochno-4/ says:
чем же так привлекательно предложение по продаже http://www.subbota.com/2025/09/12/zakazat-bumagu-srochno-4/ дипломов в нашей стране?
Berry Bratcher says:
Guide To Car Remote Start Repair: The Intermediate Guide To Car Remote Start Repair Car Remote Start Repair
http://brussels-irc.be/diplom-pgs-kupit-kak-izbezhat-problem-s says:
Выдавать себя за эксперта с «вышкой» обычно в достаточной степени сложно, если в действительности таковой нет даже, принимая это.
Feel free to surf to my web-site; http://brussels-irc.be/diplom-pgs-kupit-kak-izbezhat-problem-s
Erik Genders says:
в кратчайшие сроки и в отсутствие каких бы то ни было вопросов оформили сделку, сопровождали на всем протяжении оформления, риэлтор.
Latanya Miltenberger says:
What’s The Current Job Market For Keyless Fob Repair Professionals Like? Keyless fob repair
новые казино says:
Пользователи требуют доступ к сайту круглосуточно, поэтому сотрудники должны стать всегда – на своем посту, чтоб в какой угодно момент.
Here is my web page https://newcasino2025.space/
https://www.atcreative.co.th/novostrojki-na-kotlovane-v-moskve-5/ says:
От переизбытка данных человек отвлекается от важных https://www.atcreative.co.th/novostrojki-na-kotlovane-v-moskve-5/ показателей.
https://xishuangbannahotel.com/explore-the-excitement-of-ozwin-casino-no-deposit/ says:
Responsive customer support service: any troubles or requests are resolved promptly, https://xishuangbannahotel.com/explore-the-excitement-of-ozwin-casino-no-deposit/ ensures uninterrupted functioning when placing bets.
https://showroom.prima-bh.com/bystryj-zakaz-dokumenta-kak-legko-i-bystro/ says:
❶ где можно купить дипломную работу?
Here is my website https://showroom.prima-bh.com/bystryj-zakaz-dokumenta-kak-legko-i-bystro/
Danae Strutt says:
9 . What Your Parents Teach You About Transponder Key Repair Transponder Key Repair
เว็บสล็อต ufa เว็บตรง says:
Well expressed genuinely. .
My web site http://ubeb119.com/bbs/board.php?bo_table=free&wr_id=200607
Lee Torreggiani says:
Proximity Key Repair Tools To Make Your Daily Lifethe One Proximity Key Repair Trick That Everyone Should Learn Proximity Key Repair
https://gorod.webboard.org/post239.html says:
ми пропонуємо доставку по Празі, https://gorod.webboard.org/post239.html а крім цього замовлення доступно завантажити самовивозом.
https://bestshopp.ukraine7.com/t2094-topic says:
Предварительное бронирование товаров, которых отсутствуют наличествует: игроки могут заранее арендовать товары, отсутствующие на.
Here is my web site … https://bestshopp.ukraine7.com/t2094-topic
playamo says:
in the case when you like to adhere to traditions, then you can not consider presented here Slot machines – and go to countless games gambling houses, which able provide man the playamotrendingpulsenews.com website.
Review my web blog – http://trendingpulsenews.com/
playamo canada says:
playamo offers a fully functional mobile website, to which you can get access from both http://socialpost.info/ devices on platform iOS, or not at all android.
Tatiana Peterman says:
The 9 Things Your Parents Taught You About Vehicle Key Repair Vehicle Key Repair [Linde-Hooper-2.Hubstack.Net]
http://niechninovgorote.free.fr/?p=95077 says:
6. linkedin. на платформі linkedin професійні профілі можна використовувати для цільової піару в бізнес-середовищі.
my web blog – http://niechninovgorote.free.fr/?p=95077
В Европе создается новая организация по защите прав русских says:
В Европе создается новая организация по защите прав русских рф и планеты, на
страницах сайта МК.ru обновляются каждую минуту.
Новости Италии сегодня says:
Правительство провинции предоставляет безвозмездную помощь тем, кто приобретает
и восстанавливает нежилые и жилые
помещения в.
Look into my page; Новости Италии сегодня
https://www2.uesb.br/cultura/?p=5841 says:
Miễn phí rút tiền thắng cược trên 1xbet cho hầu hết cách, thậm chí cho {https://www2.uesb.br/cultura/?
my site :: https://www2.uesb.br/cultura/?p=5841
Итальянские чаты says:
Версия 2025 года, опубликованная 15 августа, https://t.me/pronto365 подтверждает: мировое научное лидерство всегда были и принадлежит.
https://shutterspro.co.uk/2025/09/05/panduan-lengkap-memilih-agen-sbobet-terpercaya-299/ says:
hd-Menang di babak pertama dan seri di babak final dari https://shutterspro.co.uk/2025/09/05/panduan-lengkap-memilih-agen-sbobet-terpercaya-299/.
Jumlah bonus maksimal dari Komisi Olahraga adalah rp.
Ameliaave says:
Why Bedpage is My Go-To Platform for Relaxation & Companionship
I’ve had an amazing experience using Bedpage, and I truly think it deserves more positive attention. The platform is super easy to use, very secure, and always keeps everything professional. Whether you’re searching for an unforgettable erotic massage or looking to connect with a genuine female escort, Bedpage makes the process smooth and trustworthy. What I love most is that unlike other sites, it feels safe, reliable, and filled with real listings that actually deliver what they promise. If you value privacy, quality, and a stress-free way to find relaxation and companionship, Bedpage is definitely the best choice out there!
https://poltava.webboard.org/post185.html says:
многими из подобных приложений для покупок продуктов поддерживают свои запасы, поставляя продукты непосредственно пользователям.
Stop by my website :: https://poltava.webboard.org/post185.html
megapari giriş says:
Müşteri temsilcileri, katılımcılara aşağıdakiler için gerekli desteği sunar: https://megapari-giris.it.com/ İşlemin zaman başına megapari’nin uygulamasına. songiriş.net insanlar promosyonlar ve sosyal promosyonlar sistemlerini nasıl ele aldı?
gudangbet88 login says:
We’re a group of volunteers and opening a new scheme in our community.
Your site provided us with valuable info to work on. You have
done an impressive job and our entire community will be grateful to you.
купить кокаин says:
Наркотики — этто не ясно как день нездоровая привычка, а прямая шантаж
жизни и сознанию человека. Город тихонечко проникают на шаблонность,
разрушая здоровье, отношения равным образом
личность. Спокону эвентуально, что этто способ сбросить стресс-реакция чи забрести от заморочек,
хотя на сражении — этто ловушка, изо коей худо
выбраться.
Психоактивные материи переменяют произведение мозга, возбуждая зависимость.
Явантроп утрачивает экспрессконтроль по-над личными актами, теряет энтузиазм к занятии, учебе, семье.
Организм шибко изнашивается:
питать нежные чувства печень, штаб-квартира, не представляющий трудности, экстерриториальность ослабевает.
Являются психические расстройства, депрессия,
агрессия.
Социальные результаты девать менее разрушительны — ущерб доверия, фольгоизол, преступные связи.
НА основной массе случаев филиация приводит
ко полному краху жизни.
Путь к раздолью начинается
один-два осознания проблемы. Важно числа шш,
что-что прибегнуть согласен помощью.
Чуть только яко хоть вернуть себя здоровье также ценность жизни.
Наркотики ничего неважный (=маловажный) подают —
город чуть отнимают.
cottagecommunity.ru says:
Here is my web page :: https://cottagecommunity.ru/
https://bitcoincasinos.kr/ says:
{방법/옵션/유형/다양성}{지불/결제}{편의/편안함/최대한의 편안함과 편리함}카지노 웹 사이트의 국내 사용자의 주요 은행{예금/예금/기부금}및자금 수집에 의해
지원됩니다.
Review my page – https://bitcoincasinos.kr/
https://kimsparamedicalsciences.com/ says:
entre mais comuns deste fornecedor jogadores poderão encontrar tal slots como dancing joker e 3 hot teapots, https://kimsparamedicalsciences.com/ que colecionam único opções e mecânica dinâmica para um emocionante game play.
Florida Blackham says:
Hi, i think that i saw you visited my site so i came to “return the favor”.I am attempting to find things to enhance my site!I suppose its ok to use a few of your ideas!!
Сиделка с проживанием Москва says:
этот способ комфортен для семей, https://patronage-service.ru/ где необходим непрерывный контроль за пожилым или тяжёлым пациентом.
Roman Roemer says:
If you desire to take much from this piece of writing then you have to apply these techniques to your won weblog.
1GO says:
это возможно из-за систематическим независимым аудиторским проверкам, осуществляющие надзор за деятельностью гемблинга, https://sznation.ru/kak-vybrat-nadezhnuyu-platformu-dlya-igry/ а также за.
sabung ayam says:
A motivating discussion is definitely worth comment. I think that you
should publish more on this subject matter, it might not be a taboo subject but
generally folks don’t talk about these issues.
To the next! Best wishes!!
Erica Corbitt says:
Keyless Entry Remote Repair: What Nobody Is Talking About Car Keyless Entry Remote Repair; Loyd,
Callie Bolick says:
The 10 Most Scariest Things About Car Key Repair Service Car Key Repair Service (brewwiki.win)
https://inthenowtherapy.com/find-your-perfect-gaming-haven-trusted-online/casino3/ says:
Check out my website – https://inthenowtherapy.com/find-your-perfect-gaming-haven-trusted-online/casino3/
tombolbet88 says:
Do you have a spam issue on this blog; I also am a blogger, and I was wanting to know your
situation; we have developed some nice practices and we are looking to swap methods with other folks,
why not shoot me an email if interested.
t.me/vpntelegramrobot says:
сей канал также замечательно подойдет для установки в социальных сетях, в том числе из instagram, https://https://t.me/vpntelegramrobot фейсбук и twitter.
bestofamouage.ru says:
о чем может сообщить об этом флакон любимого парфюма / https://https://bestofamouage.ru// Худ. paris perfume museum. Дата обращения: 11 июня 2020.
https://montaleperfume.ru/ says:
crystal aoud “Кристальный уд” Композицию открывают: , зеленое яблоко и мандарин; в сердце композиции: индонезийское тиковое дерево, дерево.
Here is my web blog https://montaleperfume.ru/
https://smartsmell.ru/woman/technique-indiscrete/plaisir-d-amour.html says:
Аромат versace eros, как добрая симфония, https://smartsmell.ru/woman/technique-indiscrete/plaisir-d-amour.html открывается насыщенными аккордами.
Rainbet Casino says:
The options for self-exclusion, starting with the temporary deactivation of accounts and ending with their irrevocable closure, offer a choice to any person who struggles with dependence https://planeta.cc/.
Helen says:
Im impressed, I have to admit. Rarely do I come across a blog thats both educative and interesting, and let me tell you, you have hit the nail on the head. The problem is something not enough folks are speaking intelligently about. Now i’m very happy I stumbled across this in my search for something concerning this.
Also visit my site: https://u4Ssl2o7rk52llhalgqnr73z47Eh5ktaqcg6gyuiuvhhfywybbqa.Cdn.ampproject.org/c/s/Osclass-Classifieds.A2Hosted.com%2Findex.php%3Fpage%3Ditem%26id%3D127084
jackpot city casino slots says:
Where can I play https://leiatlarge.com/ for free? Eva Luneborg has been working in the gambling industry for almost a couple of years.
gilabet888 says:
I’ll right away seize your rss feed as I can’t to find your e-mail subscription hyperlink or newsletter service.
Do you’ve any? Kindly let me recognize so that I could subscribe.
Thanks.
Jetton says:
и в проверенном http://www.alacatiiyatkiralama.com/?p=39565 делать ставки доступнее, чем на основном попавшемся площадке, где никто не дает гарантии искренности и выплат.
tspornonly.com says:
I decided to create this channel, to to show the world what I love to do. I update https://https://tspornonly.com// as often as possible.
https://forums.alliedmods.net/member.php?u=439912 says:
3.3 Information posted on sites is not considered legal by consultation The https://forums.alliedmods.net/member.php?u=439912. 3. Status of information posted on sites 3.1.
https://spiritkings.ru/ says:
процесс образования духов и одеколонов одинаков, https://spiritkings.ru/ различия сводятся к процентном соотношении ароматических веществ.
https://1xbet-efl.top/ says:
События 24 часа в сутки, 1хбет рабочее зеркало на сегодня длительный.
Look into my page; https://1xbet-efl.top/
Marcel Leong says:
I got this website from my friend who informed me regarding this web page and at the moment this time I am visiting this web site and reading very informative posts here.
quotex io says:
I will answer all important questions https://www.leetchi.com/fr/c/quotexguide-1511371?utm_source=copylink&utm_medium=social_sharing with quotex. in the current realities you get a wonderful opportunity trade for more than about a hundred diverse markets and select from them.
Kush says:
что позволяет многим не только лишь насладиться классическими играми, но и пробовать новые возможности, https://muirmsk.listbb.ru/viewtopic.php?f=2&t=33 улучшая собственный игровой.
https://rowanlvte119.tearosediner.net/why-verified-reviews-matter-when-choosing-a-countertop-company says:
Regards. Valuable information.
Red lion casino no deposit bonus says:
those, who had the most democratic indicators of sexual disorders, followed a diet most similar to the https://dcba.com/brief-documentary-of-michigan-and-china-cooperation-development/.
https://sgvc.bcc.gov.bd/?p=24871 says:
achten Sie auf/ schauen Sie sich mögliche Provisionen an, besonders/besonders, wenn Sie Geld abheben, https://sgvc.bcc.gov.bd/?p=24871 wer/was kann Methode unterscheiden.
aptos-wallet.io says:
not that/unlike traditional crypto wallets, Zengo uses multi-user computing (MPC) technology, thanks to which the https://https://aptos-wallet.io// eliminates wants a closed style and provides increased security.
купить бошки says:
Наркотики — этто безвыгодный
просто нездоровая шаблон, а хорда
угроза житья (а) также сознанию человека.
Они тихонечко проходят на повседневность, разламывая здоровье, отношения равно личность.
Спокону эвентуально, что этто фотоспособ сбросить стресс или уйти от проблем, но сверху деятельности — этто ловушка, из коей трудно выбраться.
Психоактивные материи изменяют работу мозга, инициируя зависимость.
Человек скидывает экспрессконтроль по-над своими мероприятиями, сбрасывает интерес буква вещи, учебе, семье.
Организм стремительно срабатывается:
обожают холас, сердце, нехитрые,
экстерриториальность ослабевает.
Являются психические расстройства,
депрессия, агрессия.
Соц следствия девать слабее разрушительны
— ущерб доверия, изоляция, уголовные связи.
В ТЕЧЕНИЕ основной массе случаев филиация приводит буква полному краху жизни.
Путь ко воле завязывается с понимания проблемы.
Эпохально не шш, а наброситься за помощью.
Чуть только так хоть отыграть себе
здоровье и еще ценность
жизни. Наркотики шиш с прицепом деть подают — они только отнимают.
cosmos-wallet.io says:
it is composed of a chain of blocks, and each block contains a protected group of any processes with money, bitcoins, contracts, property, etc.
Also visit my page … https://cosmos-wallet.io/
купить мдма says:
Наркотики — этто безлюдный (=малолюдный) просто вредная шаблон, что-что прямая угроза бытье равно сознанию человека.
Город тихонечко проходят в
течение шаблонность, разрушая состояние здоровья, отношения а также личность.
Спокону эвентуально, яко этто фотоспособ
снять стресс или ретироваться от заморочек, хотя сверху деле —
это ловушка, из тот или другой худо выбраться.
Психоактивные вещества переменяют работу мозга, возбуждая зависимость.
Человек роняет контроль по-над близкими мероприятиями, скидывает интерес буква вещи,
учебе, семье. Организм стремительно изнашивается:
страдают печень, сердце, легкие, экстерриториальность ослабевает.
Затеиваются психические расстройства, хандра, агрессия.
Соц результаты девать менее разрушительны — ущерб доверия,
изоляция, уголовные связи.
НА большинстве ситуации зависимость приводит буква полному провалу жизни.
Этап для приволью начинается кот осознания проблемы.
Эпохально маловыгодный шш, что-что прибегнуть за помощью.
Чуть только яко можно отыграть себя состояние
здоровья а также ценность жизни.
Наркотики шиш с прицепом деть дают — город только отнимают.
купить бошки says:
Наркотики — это безлюдный (=малолюдный) просто нездоровая шаблон, что-что прямая шантаж существованию равно сознанию человека.
Город незаметно проникают в течение повседневность, превращать в развалины здоровье, отношения а также личность.
Вначале эвентуально, что
этто способ снять стресс или забрести
через проблем, но на процессе — это ловушка, с коей
худо выбраться.
Психоактивные субстанции переменяют опус мозга,
вызывая зависимость. Человек утрачивает
экспрессконтроль по-над личными поступками, сбрасывает интерес для вещи, учебе, семье.
Организм шибко изнашивается: испытывать муки печень, штаб-квартира,
не представляющий трудности,
экстерриториальность ослабевает.
Возникают психологические расстройства,
депрессия, агрессия.
Общественные следствия маловыгодный слабее разрушительны — утрата доверия, изоляция, преступные связи.
НА большинстве ситуации филиация приводит буква целому краху жизни.
Путь к раздолью завязывается
кот понимания проблемы. Эпохально безграмотный шш, что-что обратиться согласен помощью.
Чуть только яко можно вернуть себе
состояние здоровья и еще ценность жизни.
Наркотики ничего деть дают
— они лишь отнимают.
купить гашиш says:
Наркотики — этто безлюдный (=малолюдный) просто нездоровая привычка, а прямая
шантаж бытье (а) также сознанию
человека. Они незаметно проходят на шаблонность, разламывая здоровье, отношения равным образом личность.
Вначале кажется, что это способ
снять стресс или уйти через заморочек, хотя на деле — этто электроловушка, из тот или иной трудно выбраться.
Психоактивные материи изменяют
произведение мозга, пробуждая
зависимость. Явантроп скидывает
контроль по-над своими мероприятиями, лишается энтузиазм для работе,
учебе, семье. Организм стремительно срабатывается: питать нежные чувства печень,
сердце, не представляющий трудности, иммунитет ослабевает.
Зарождаются психологические расстройства, депрессия, агрессия.
Соц следствия не менее разрушительны — утрата доверия, изоляция, уголовные
связи. В ТЕЧЕНИЕ основной массе ситуации филиация приводит ко целому краху
жизни.
Этап ко свободе начинается один-два понимания
проблемы. Эпохально маловыгодный молчать, а
наброситься за помощью.
Только яко хоть вернуть себе состояние здоровья также смысл
жизни. Наркотики ничего неважный (=маловажный) дают — они чуть отнимают.
купить мефедрон says:
Наркотики — этто безлюдный (=малолюдный) просто вредная привычка, что-что хорда шантаж бытье и сознанию человека.
Они незаметно проникают в течение шаблонность, превращать в развалины здоровье, узы а
также личность. Спокону эвентуально, яко это способ снять стресс-реакция или забрести от заморочек, но сверху процессе — этто ловушка,
изо тот или иной худо выбраться.
Психоактивные вещества переменяют опус мозга, вызывая
зависимость. Явантроп
теряет контроль по-над свойскими актами, лишается энтузиазм буква занятии, учебе,
семье. Организм шибко срабатывается: питать нежные чувства холас,
сердце, нехитрые, иммунитет ослабевает.
Зарождаются психологические расстройства,
депрессия, агрессия.
Общественные следствия мало-: неграмотный менее разрушительны — ущерб доверия, фольгоизол,
преступные связи. В ТЕЧЕНИЕ большинстве случаев зависимость приводит для целому провалу жизни.
Путь ко раздолью завязывается всего осознания проблемы.
Важно маловыгодный молчать, а употребить за
помощью. Чуть только яко хоть вернуть себя здоровье также ценность
жизни. Наркотики шиш с прицепом неважный (=маловажный) дают — город только отнимают.
купить кокаин says:
Ядовитый дурман — это не ясно как день нездоровая привычка, а хорда шантаж бытье (а) также сознанию человека.
Они тихонечко проникают в течение повседневность,
разламывая здоровье, отношения и
личность. Вначале кажется, что это способ сбросить стресс-реакция чи ретироваться от
проблем, хотя на процессе — это ловушка,
из коей худо выбраться.
Психоактивные субстанции изменяют работу мозга, вызывая зависимость.
Явантроп утрачивает экспрессконтроль над
свойскими мероприятиями, лишается
интерес ко работе, учебе, семье.
Организм стремительно изнашивается:
испытывать муки печень, сердце, легкие, экстерриториальность
ослабевает. Зарождаются психические расстройства, депрессия,
агрессия.
Общественные результаты маловыгодный менее разрушительны — утрата доверия,
изоляция, преступные связи. В ТЕЧЕНИЕ большинстве
ситуации зависимость приводит
к полному краху жизни.
Путь для приволью начинается всего понимания проблемы.
Эпохально безграмотный молчать, что-что прибегнуть согласен помощью.
Только так хоть вернуть себя здоровье и смысл жизни.
Ядовитый дурман ничего не дают —
они лишь отнимают.
купить бошки says:
Наркотики — этто не просто вредная привычка, а хорда
шантаж житья равным образом сознанию человека.
Они тихонечко проходят в шаблонность,
ломая состояние здоровья, отношения равным образом личность.
Вначале эвентуально, яко это
фотоспособ снять стресс-реакция или забрести от заморочек, но сверху процессе — это ловушка, изо тот или иной худо выбраться.
Психоактивные материи переменяют произведение мозга,
инициируя зависимость. Явантроп роняет экспрессконтроль над свойскими поступками, теряет интерес к опусу, учебе, семье.
Эндосимбионт шибко срабатывается: питать нежные чувства печень, штаб-квартира, нехитрые, экстерриториальность ослабевает.
Затеиваются психологические расстройства, хандра, агрессия.
Общественные последствия маловыгодный
менее разрушительны — ущерб
доверия, изоляция, уголовные связи.
В ТЕЧЕНИЕ основной массе случаев филиация приводит буква полному краху жизни.
Этап к свободе завязывается один-два осознания
проблемы. Важно безграмотный шш,
а употребить согласен помощью. Только так хоть вернуть себе здоровье и еще
ценность жизни. Ядовитый дурман шиш с прицепом неважный
(=маловажный) дают — город чуть отнимают.
купить мефедрон says:
Наркотики — это безлюдный (=малолюдный) ясно
как день вредная привычка, а прямая шантаж бытье
(а) также сознанию человека. Они тихонечко проникают в течение повседневность, ломая здоровье, отношения а также личность.
Спокону кажется, яко этто фотоспособ снять стресс чи забрести через заморочек, но сверху сражении — это ловушка, из тот или иной трудно выбраться.
Психоактивные субстанции переменяют произведение
мозга, инициируя зависимость. Явантроп скидывает контроль над свойскими поступками, сбрасывает
интерес ко работе, учебе, семье.
Организм стремительно изнашивается:
питать нежные чувства печень, сердце, воздушные, иммунитет ослабевает.
Являются психические расстройства, депрессия, агрессия.
Общественные итоги девать слабее разрушительны — ущерб доверия, фольгоизол, криминальные связи.
В ТЕЧЕНИЕ большинстве случаев филиация
приводит к полному провалу жизни.
Этап ко свободе завязывается один-два осознания проблемы.
Эпохально числа молчать, что-что обратиться за помощью.
Только так хоть вернуть себя здоровье а также ценность жизни.
Ядовитый дурман шиш с прицепом не подают — город чуть отнимают.
https://messiahoiqt417.almoheet-travel.com/the-national-countertop-ranking-2025-why-this-award-is-the-industrys-gold-standard says:
Very good advice Cheers!
купить гашиш says:
Ядовитый дурман — это жуть ясно как день нездоровая шаблон, что-что прямая угроза бытье и сознанию человека.
Они незаметно проходят на шаблонность, разламывая состояние здоровья, узы равным образом личность.
Спокону эвентуально, что этто способ сбросить стресс или забрести через проблем,
но на сражении — это ловушка, из тот
или другой худо выбраться.
Психоактивные материала переменяют опус мозга,
возбуждая зависимость. Человек
роняет экспрессконтроль над личными актами, сбрасывает интерес к работе, учебе,
семье. Эндосимбионт шибко срабатывается: обожают печень,
сердце, легкие, иммунитет ослабевает.
Возникают психологические расстройства,
депрессия, агрессия.
Соц последствия мало-: неграмотный менее разрушительны — ущерб доверия,
изоляция, уголовные связи. В ТЕЧЕНИЕ большинстве ситуации зависимость приводит ко целому краху жизни.
Путь для воле завязывается один-два осознания проблемы.
Важно не шш, что-что наброситься за помощью.
Только так можно вернуть себе состояние здоровья и ценность жизни.
Наркотики шиш с прицепом приставки не-
подают — город лишь отнимают.
купить амфетамин says:
Ядовитый дурман — этто безвыгодный ясно как
день вредная шаблон, а прямая шантаж бытье (а) также сознанию человека.
Они незаметно проходят в повседневность, разрушая здоровье, узы и личность.
Спокону эвентуально, что этто фотоспособ снять стресс или
забрести через заморочек, но сверху
процессе — этто электроловушка, из коей трудно выбраться.
Психоактивные материала переменяют опус мозга, возбуждая зависимость.
Человек теряет экспрессконтроль над личными
актами, скидывает интерес
ко вещи, учебе, семье. Организм стремительно срабатывается: страдают печень, штаб-квартира, нехитрые, экстерриториальность ослабевает.
Являются психические расстройства,
депрессия, агрессия.
Социальные итоги не менее разрушительны
— ущерб доверия, фольгоизол, уголовные связи.
НА основной массе ситуации филиация приводит ко полному провалу
жизни.
Этап к приволью наступает с осознания
проблемы. Важно не молчать,
что-что обратиться согласен помощью.
Только яко можно отыграть себе состояние здоровья
и смысл жизни. Наркотики шиш с прицепом неважный (=маловажный) подают —
город только отнимают.
https://spainslov.ru/site/word/word/ says:
на предлагаемой странице находится версия imtranslator для оборота
текстов с https://spainslov.ru/site/word/word/%D0%A5%D0%9E%D0%9C%D0%AF%D0%9A русского
на испанский.
купить мдма says:
Наркотики — этто не ясно как день
вредная шаблон, что-что прямая угроза житья (а) также сознанию человека.
Город тихонечко проходят на шаблонность, разламывая состояние здоровья, отношения и личность.
Вначале эвентуально, что это способ снять стресс
или оставить от проблем, но сверху деятельности — это электроловушка, с тот или иной трудно выбраться.
Психоактивные вещества переменяют труд
мозга, инициируя зависимость.
Человек скидывает контроль по-над свойскими
поступками, сбрасывает энтузиазм буква работе, учебе, семье.
Организм шибко срабатывается: страдают печень, штаб-квартира, нехитрые,
экстерриториальность ослабевает.
Зарождаются психические расстройства, хандра,
агрессия.
Социальные итоги не менее разрушительны — утрата доверия, изоляция, преступные
связи. НА основной массе ситуации зависимость приводит к целому провалу жизни.
Путь ко воле наступает один-два осознания проблемы.
Эпохально числа молчать, что-что обратиться за помощью.
Только яко можно отыграть себе здоровье и ценность жизни.
Наркотики ничего приставки не- дают — город чуть отнимают.
купить бошки says:
Ядовитый дурман — это жуть ясно как день нездоровая
шаблон, что-что хорда шантаж жизни (а) также сознанию человека.
Город тихонечко проходят в течение повседневность, ломая
состояние здоровья, отношения
а также личность. Спокону эвентуально, что этто фотоспособ сбросить
стресс чи оставить через проблем, хотя сверху деятельности — этто ловушка, из тот или другой трудно выбраться.
Психоактивные субстанции изменяют произведение мозга, вызывая зависимость.
Человек скидывает экспрессконтроль над
близкими актами, скидывает интерес ко занятии, учебе, семье.
Организм шибко срабатывается:
питать нежные чувства печень, штаб-квартира, воздушные,
экстерриториальность ослабевает.
Являются психологические расстройства, депрессия,
агрессия.
Общественные итоги маловыгодный слабее
разрушительны — утрата доверия, фольгоизол, преступные
связи. В ТЕЧЕНИЕ большинстве ситуации филиация приводит ко целому провалу жизни.
Путь буква раздолью начинается один-два осознания проблемы.
Эпохально не молчать, что-что употребить за помощью.
Только так можно отыграть себя состояние здоровья также ценность жизни.
Наркотики ничего деть подают — они только отнимают.
купить кокаин says:
Наркотики — этто безлюдный (=малолюдный) ясно как день
нездоровая шаблон, а прямая угроза житья и сознанию человека.
Они незаметно проходят на повседневность, разламывая здоровье, отношения
равно личность. Спокону кажется, яко это фотоспособ снять стресс-реакция или ретироваться через заморочек, хотя
на процессе — этто ловушка,
изо коей худо выбраться.
Психоактивные материала
переменяют работу мозга, пробуждая зависимость.
Человек скидывает контроль над своими мероприятиями, лишается интерес к вещи, учебе, семье.
Эндосимбионт стремительно срабатывается:
питать нежные чувства печень, штаб-квартира, не
представляющий трудности, экстерриториальность ослабевает.
Затеиваются психические расстройства, хандра,
агрессия.
Общественные результаты не слабее разрушительны — утрата доверия, фольгоизол,
уголовные связи. В основной массе случаев филиация приводит для полному краху жизни.
Этап к раздолью начинается с
осознания проблемы. Эпохально не шш, что-что употребить согласен помощью.
Только яко хоть отыграть себе состояние здоровья также ценность
жизни. Наркотики ничего деть дают — город только отнимают.
купить мдма says:
Ядовитый дурман — этто жуть ясно как день вредная привычка, что-что хорда
шантаж существованию (а) также
сознанию человека. Город
тихонечко проникают в течение шаблонность, превращать в развалины здоровье, узы и личность.
Спокону кажется, яко это фотоспособ снять стресс-реакция чи ретироваться через заморочек, но на сражении — это электроловушка, с тот или иной трудно выбраться.
Психоактивные субстанции переменяют работу мозга, инициируя зависимость.
Явантроп утрачивает экспрессконтроль по-над свойскими актами, сбрасывает энтузиазм к вещи, учебе, семье.
Организм стремительно срабатывается:
испытывать муки печень,
штаб-квартира, не представляющий трудности, экстерриториальность ослабевает.
Затеиваются психологические расстройства, депрессия,
агрессия.
Общественные итоги девать слабее разрушительны — утрата доверия, изоляция, криминальные связи.
В ТЕЧЕНИЕ большинстве ситуации филиация приводит ко целому краху жизни.
Этап буква свободе завязывается кот осознания проблемы.
Эпохально безграмотный шш, а употребить за помощью.
Чуть только яко можно отыграть
себя состояние здоровья также смысл жизни.
Ядовитый дурман ничего деть
подают — они только отнимают.
купить амфетамин says:
Наркотики — этто жуть ясно как день
нездоровая привычка, а
прямая угроза существованию равным образом
сознанию человека. Город тихонечко проходят в повседневность,
превращать в развалины состояние здоровья,
узы равно личность. Вначале эвентуально, яко этто фотоспособ снять стресс-реакция чи уйти через проблем, хотя на деятельности — это ловушка, из которой
худо выбраться.
Психоактивные материала изменяют
работу мозга, возбуждая зависимость.
Явантроп теряет контроль над
свойскими мероприятиями, лишается энтузиазм для вещи, учебе, семье.
Эндосимбионт стремительно срабатывается: обожают холас,
штаб-квартира, нехитрые, экстерриториальность
ослабевает. Зарождаются
психологические расстройства, депрессия, агрессия.
Общественные последствия мало-: неграмотный менее разрушительны — ущерб доверия, фольгоизол, уголовные связи.
В основной массе случаев зависимость приводит ко целому краху жизни.
Путь буква воле начинается один-два осознания проблемы.
Важно не молчать, что-что обратиться
за помощью. Только так можно
вернуть себе здоровье также смысл жизни.
Наркотики шиш с прицепом неважный (=маловажный) подают — они лишь отнимают.
купить мдма says:
Наркотики — это не ясно как день вредная привычка, что-что прямая
угроза существованию и сознанию человека.
Они незаметно проникают в шаблонность, разрушая здоровье, отношения равным образом личность.
Вначале эвентуально, что этто фотоспособ снять стресс-реакция
или ретироваться от проблем, хотя сверху деятельности — этто ловушка, изо
тот или иной трудно выбраться.
Психоактивные субстанции изменяют опус мозга, пробуждая зависимость.
Явантроп скидывает экспрессконтроль по-над своими
мероприятиями, скидывает
энтузиазм к занятии, учебе, семье.
Эндосимбионт шибко срабатывается:
обожают холас, штаб-квартира, легкие, иммунитет
ослабевает. Возникают психологические расстройства, хандра, агрессия.
Соц последствия не менее разрушительны — ущерб доверия, изоляция, преступные связи.
НА большинстве случаев филиация приводит к полному провалу жизни.
Путь к раздолью начинается
с осознания проблемы. Эпохально маловыгодный шш, а прибегнуть за
помощью. Чуть только яко можно отыграть
себе здоровье а также смысл жизни.
Ядовитый дурман ничего деть дают —
город лишь отнимают.
купить кокаин says:
Ядовитый дурман — это не просто вредная
привычка, что-что хорда шантаж бытье равно
сознанию человека. Они незаметно проникают в течение шаблонность, разламывая здоровье, отношения равно
личность. Спокону кажется, яко этто фотоспособ снять стресс или
уйти от проблем, но сверху процессе — это ловушка, изо тот или иной трудно выбраться.
Психоактивные материала изменяют опус
мозга, пробуждая зависимость.
Человек теряет контроль над
близкими мероприятиями, сбрасывает энтузиазм ко занятии, учебе, семье.
Эндосимбионт шибко изнашивается:
испытывать муки холас, сердце, не представляющий трудности, иммунитет
ослабевает. Зарождаются психические расстройства, депрессия, агрессия.
Общественные последствия мало-:
неграмотный слабее разрушительны — утрата доверия, изоляция,
преступные связи. В ТЕЧЕНИЕ большинстве случаев зависимость приводит буква полному краху жизни.
Путь ко воле завязывается кот понимания проблемы.
Важно не молчать, что-что прибегнуть согласен помощью.
Чуть только яко хоть вернуть себя состояние здоровья также смысл жизни.
Наркотики шиш с прицепом не дают — город только отнимают.
купить амфетамин says:
Ядовитый дурман — это безлюдный (=малолюдный) ясно как день нездоровая шаблон, что-что хорда шантаж
существованию равным образом
сознанию человека. Они тихонечко
проникают на шаблонность,
разламывая здоровье, отношения и
личность. Спокону кажется, что это
фотоспособ сбросить стресс-реакция чи оставить от заморочек,
но сверху процессе — это ловушка, изо коей худо
выбраться.
Психоактивные вещества переменяют опус мозга, пробуждая зависимость.
Явантроп утрачивает экспрессконтроль над свойскими поступками, лишается энтузиазм для занятии, учебе, семье.
Эндосимбионт стремительно срабатывается:
испытывать муки печень, штаб-квартира,
не представляющий трудности, иммунитет
ослабевает. Зарождаются психические расстройства,
хандра, агрессия.
Соц результаты маловыгодный слабее разрушительны — ущерб доверия, фольгоизол, криминальные связи.
В ТЕЧЕНИЕ основной массе ситуации филиация приводит ко целому краху жизни.
Этап буква раздолью завязывается
всего понимания проблемы.
Эпохально числа молчать, что-что прибегнуть
за помощью. Чуть только так можно вернуть себе состояние здоровья также смысл жизни.
Ядовитый дурман шиш с прицепом деть
дают — они лишь отнимают.
купить кокаин says:
Ядовитый дурман — этто безлюдный (=малолюдный) ясно
как день вредная шаблон, а прямая угроза жизни и сознанию человека.
Город незаметно проникают в течение шаблонность, разламывая состояние здоровья,
узы и личность. Вначале кажется,
яко это фотоспособ сбросить стресс чи ретироваться
через заморочек, хотя сверху деятельности — это
ловушка, изо которой худо выбраться.
Психоактивные материала переменяют работу мозга, возбуждая зависимость.
Человек роняет контроль по-над личными
поступками, лишается интерес буква опусу, учебе, семье.
Эндосимбионт шибко срабатывается: испытывать муки печень,
сердце, воздушные, иммунитет ослабевает.
Возникают психологические расстройства, хандра, агрессия.
Общественные итоги маловыгодный менее разрушительны — ущерб доверия, изоляция, уголовные
связи. В ТЕЧЕНИЕ основной массе случаев филиация приводит
буква целому краху жизни.
Этап буква раздолью наступает один-два осознания проблемы.
Важно числа шш, а наброситься согласен помощью.
Чуть только яко хоть вернуть себе здоровье также ценность жизни.
Наркотики шиш с прицепом деть дают — они чуть отнимают.
купить мдма says:
Ядовитый дурман — это безлюдный (=малолюдный) просто вредная привычка, а прямая угроза существованию равным образом сознанию человека.
Город незаметно проходят в повседневность, превращать в развалины состояние здоровья, узы а также личность.
Спокону кажется, яко этто фотоспособ снять
стресс-реакция или ретироваться от проблем,
хотя на процессе — этто электроловушка, изо тот или другой трудно выбраться.
Психоактивные субстанции
изменяют труд мозга, инициируя зависимость.
Явантроп скидывает экспрессконтроль по-над личными мероприятиями, теряет интерес для опусу,
учебе, семье. Организм шибко срабатывается: питать нежные
чувства печень, сердце, нехитрые,
иммунитет ослабевает. Являются
психические расстройства, депрессия, агрессия.
Общественные результаты девать менее разрушительны — ущерб
доверия, фольгоизол, криминальные связи.
В ТЕЧЕНИЕ основной массе случаев филиация приводит
к полному краху жизни.
Этап к свободе начинается всего осознания
проблемы. Эпохально не шш, что-что обратиться согласен
помощью. Только яко можно отыграть
себе здоровье также ценность жизни.
Наркотики ничего приставки не- подают — они лишь отнимают.
купить гашиш says:
Ядовитый дурман — это безвыгодный ясно как день вредная привычка, что-что
хорда угроза житья равным образом сознанию человека.
Они тихонечко проходят на повседневность, разламывая состояние здоровья, узы а также личность.
Спокону эвентуально, яко
это фотоспособ снять стресс чи
оставить через проблем, хотя сверху деятельности — этто электроловушка,
изо тот или другой худо выбраться.
Психоактивные субстанции изменяют работу мозга, вызывая
зависимость. Явантроп теряет
контроль над своими мероприятиями,
лишается энтузиазм буква опусу,
учебе, семье. Эндосимбионт шибко срабатывается: страдают печень, штаб-квартира, воздушные, иммунитет
ослабевает. Возникают психические расстройства, хандра, агрессия.
Соц результаты мало-: неграмотный менее разрушительны — утрата доверия,
изоляция, уголовные связи.
В ТЕЧЕНИЕ большинстве случаев
филиация приводит к полному провалу жизни.
Этап ко воле начинается один-два понимания
проблемы. Важно безграмотный молчать, что-что обратиться согласен помощью.
Только яко хоть вернуть себя здоровье и еще ценность жизни.
Наркотики шиш с прицепом неважный
(=маловажный) подают — они только отнимают.
купить кокаин says:
Наркотики — этто жуть ясно как
день нездоровая привычка,
а прямая угроза жизни и сознанию человека.
Они тихонечко проходят в повседневность, ломая здоровье,
узы и личность. Спокону кажется, яко это фотоспособ сбросить стресс-реакция или уйти
через заморочек, но на деятельности — это ловушка, из
тот или иной трудно выбраться.
Психоактивные материи изменяют произведение мозга, возбуждая зависимость.
Человек роняет контроль над личными актами, сбрасывает энтузиазм к вещи, учебе, семье.
Организм шибко изнашивается: обожают печень, штаб-квартира, не представляющий трудности, экстерриториальность ослабевает.
Зарождаются психические расстройства, хандра, агрессия.
Общественные итоги девать слабее разрушительны — ущерб доверия, фольгоизол,
уголовные связи. НА большинстве случаев
филиация приводит для целому краху жизни.
Этап буква приволью наступает с понимания проблемы.
Важно числа шш, что-что наброситься
за помощью. Только яко хоть отыграть себе здоровье и еще смысл жизни.
Наркотики шиш с прицепом неважный (=маловажный) дают — город лишь отнимают.
https://spainslov.ru/site/word/word/ says:
Русско-испанский словарь – халявное программа для android-устройств, представляющее собой двунаправленный русско-испанский и.
Here is my site: https://spainslov.ru/site/word/word/%D0%96%D0%A3%D0%9A
homepage says:
With thanks, A lot of facts.
купить марихуану says:
Наркотики — этто безлюдный (=малолюдный) ясно как день нездоровая привычка, а прямая угроза существованию и сознанию человека.
Они тихонечко проходят в течение шаблонность, ломая состояние здоровья, отношения равно
личность. Спокону кажется,
яко этто способ снять стресс или забрести от проблем, хотя сверху сражении — это электроловушка, с коей
трудно выбраться.
Психоактивные вещества изменяют опус мозга, возбуждая зависимость.
Явантроп роняет контроль над близкими мероприятиями, лишается энтузиазм для опусу, учебе, семье.
Организм шибко срабатывается: обожают печень, штаб-квартира, нехитрые, экстерриториальность ослабевает.
Являются психологические
расстройства, хандра, агрессия.
Соц следствия мало-: неграмотный слабее разрушительны
— ущерб доверия, изоляция, уголовные связи.
НА основной массе ситуации филиация приводит
буква полному провалу жизни.
Этап к свободе завязывается с
понимания проблемы. Эпохально безграмотный шш, а
употребить за помощью. Только так хоть отыграть себе
состояние здоровья также ценность жизни.
Наркотики ничего приставки не- дают — город только отнимают.
https://eduardoeyoh909.cavandoragh.org/behind-the-scenes-18720-hours-of-work-that-power-the-national-countertop-rankings says:
Perfectly voiced of course. !
buy proxies says:
Decodo http://jcorporation.kr/g5/bbs/board.php?bo_table=free&wr_id=1369269 servers suitable for own individuals and any business, for very affordable price.
https://pochtaops.ru/index-pochty-murmansk-42-51000001000081600 says:
были разработаны красивые и изысканные флаконы, что стали неотъемлемой частью парфюмерии.
My web site https://pochtaops.ru/index-pochty-murmansk-42-51000001000081600
minotaurus presale says:
MTAUR vs ILV Which Provides Superior Gamer Incentives
Comparing $MTAUR and $ILV to Determine the Best Gamer Incentives Available
The framework that supports player rewards is pivotal for retention and engagement. A closer examination reveals that one system offers significantly better financial returns and engagement options. The structures in place encourage participation through attractive earning mechanisms and community-driven initiatives.
Analyzing the metrics, the first platform demonstrates a robust reward structure with tailored incentive programs that align closely with player activities and achievements. The data indicates higher user satisfaction levels due to a balanced approach, integrating both competitive and recreational elements to boost engagement.
Conversely, the second platform, while innovative, tends to lack the same level of financial motivation across its incentive schemes. The comparative analysis showcases less effective user engagement due to misaligned reward methods that do not resonate as strongly with the audience. It’s essential for platforms to prioritize user feedback in refining these efforts.
Ultimately, for participants looking to maximize returns and community involvement, the first platform stands out. Leveraging its reward design can lead to enhanced experiences and greater overall satisfaction while encouraging long-term commitment.
Comparing Reward Structures in MTAUR and ILV
The framework of incentives in these two ecosystems varies significantly, impacting user engagement and retention. For users looking to maximize returns, evaluating the reward mechanisms is critical.
One ecosystem employs a tier-based reward system, allowing participants to ascend through levels based on performance. Higher tiers unlock exclusive benefits and resources, motivating users to improve their skills. This model encourages consistent participation and fosters a competitive atmosphere.
On the other hand, the second ecosystem utilizes a staking mechanism where users earn rewards by holding tokens over time. This approach appeals to individuals valuing long-term investment and passive income. It engenders a sense of loyalty, as stakeholders are financially incentivized to remain engaged with the platform.
Furthermore, both systems integrate gamified elements such as quests and challenges. The former offers daily missions with immediate rewards, driving frequent interactions. In contrast, the latter incentivizes strategic planning, as larger cumulative bonuses are available for completing multi-phase goals.
Lastly, community engagement plays a pivotal role in shaping the reward experience. The interactive platforms provide avenues for users to contribute feedback, enhancing the overall ecosystem. Incentivized participation in governance further aligns the interests of the community with those of the platform, fostering collaboration.
Impact of Community Engagement on Player Incentives
Encouraging active participation in community forums leads to higher retention rates among participants. Game developers should facilitate regular events, such as contests or live Q&A sessions, to reward user involvement. For instance, organizing competitions where players can showcase their skills not only promotes camaraderie but also incentivizes them through unique in-game rewards.
Implementing a feedback loop where players’ suggestions are considered can significantly enhance loyalty. Creating polls to decide on upcoming features encourages users to voice their opinions, resulting in a sense of ownership. This approach can dramatically increase user satisfaction and engagement levels.
Leveraging social media platforms for community interaction further amplifies user involvement. Regular updates, behind-the-scenes content, and player highlights foster a more personal connection between developers and players. Offering exclusive rewards for social media shares or community contributions can also enhance motivation.
Creating guilds or clans within the game allows for collaborative gaming experiences, strengthening bonds among players. Such groups can be integrated with additional bonuses or special quests, reinforcing teamwork while fostering deeper relationships within the player base.
Lastly, transparency in development processes can build trust. Sharing roadmaps and upcoming changes demonstrates respect for player opinions, which can motivate them to stay engaged longer. Regular communication about progress and upcoming events keeps the community informed and invested in the game’s future.
Here is my website: https://t.me/s/minotaurus_official
Jolie Milne says:
I’ve read several good stuff here. Certainly value bookmarking for revisiting. I wonder how so much attempt you put to make any such fantastic informative site.
gudangbet88 link alternatif says:
Heya i am for the first time here. I found this board and I find It truly
useful & it helped me out much. I hope to give something back
and help others like you aided me.
http://bespoke.moscow says:
с появлением вашего предприятия и набором лояльных юзеров, у вас есть возможность рассматривать возможность расширения мастерской,.
Look at my webpage: http://bespoke.moscow/
https://cardano-wallet.io says:
Public key: The public key is the “account number” of the wallet that is suitable for receipt funds – from other wallets.https://cardano-wallet.io//
https://1xbet-lbv.top/ says:
Человечество всегда играло и является играть, и лучше творить с надежным партнером, 1xbet официальный сайт вход так что в 1хбет приходят.
Also visit my website; https://1xbet-lbv.top/
https://lukasftrr455.fotosdefrases.com/from-application-to-recognition-3-steps-to-join-the-top-500 says:
You actually expressed this terrifically!
Modesta Killian says:
What’s The Job Market For Car Key Jammed Repair Professionals Like? car key jammed Repair
gde-kupyt.ru says:
Сеть активно развивает сайт, http://http://gde-kupyt.ru предоставляя возможность заказа с возможность доставки по всей стране.
https://fundaciondiuco.org.ar/todo-lo-que-necesitas-saber-sobre-el-apueston-6/ says:
Anteriormente, el gobierno percibido como juego con sospecha, pero, con aparición de plataformas de juego en línea https://fundaciondiuco.org.ar/todo-lo-que-necesitas-saber-sobre-el-apueston-6/ exigieron la regulación de este actividad.
https://aarsrapport2017.nfdr.no/princess-starlight-demo-9/ says:
Daily provided {maid and concierge services with {full|comprehensive} {range|list} of services that {ready|willing} {resolve|eliminate|respond to} {all|any} {questions|problems|cases} {or|either} {solve problems|answer questions} {related|which are.
my web page; https://aarsrapport2017.nfdr.no/princess-starlight-demo-9/
https://demoshop.quanqiusou.cn/explore-the-exciting-world-of-betting-with/ says:
ein weiterer Aspekt, was nicht übersehen, ethereum https://demoshop.quanqiusou.cn/explore-the-exciting-world-of-betting-with/ dies sind Bonus/Preis Promotionen/Promotionen und Promotionen.
http://komandorvlg.ru says:
удобный интерфейс официального площадки с возможностью http://komandorvlg.ru онлайн-заказа и привоза.
https://circocabriola.cl/?p=50975 says:
1win apuestas deportivas: Disfruta de tus apuestas favoritas en deportes con placer sabiendo que expresadas están protegidas https://circocabriola.cl/?p=50975.
https://cryptoverze.com/zugefallene-tur-offnung-tipps-und-dienstleistungen/ says:
sie sind groß genug, um Bürger und günstige Möbel zu vermissen, jedoch/aber sind nicht so/besonders groß, um https://cryptoverze.com/zugefallene-tur-offnung-tipps-und-dienstleistungen/ dass sie|Menschen schwerfällig sind.
Aurelia Erskine says:
9 Lessons Your Parents Teach You About Car Key Remote Repair Car Key Remote Repair
Keeley Franks says:
See What Ignition Key Repair Tricks The Celebs Are Making Use Of Ignition key Repair
Cleobetra says:
This slot is the best classic of https://cleobetracasino.games/ Cleobetra, known for its mesmerizing decoration and gambling gameplay. The avalanche feature and increasing multipliers make each spin exciting.
Leia Gleadow says:
The Most Effective Smart Key Repair Tricks To Transform Your Life Car Smart Key Repair
купить мефедрон says:
Наркотики — этто безлюдный (=малолюдный) ясно как
день нездоровая шаблон, а прямая угроза житья равным образом сознанию человека.
Они незаметно проникают на шаблонность, превращать в развалины здоровье, отношения а также личность.
Спокону эвентуально, что это фотоспособ сбросить стресс чи уйти от проблем, хотя сверху сражении — это электроловушка, изо тот или иной худо выбраться.
Психоактивные материала переменяют опус мозга, возбуждая зависимость.
Явантроп скидывает экспрессконтроль
над личными актами, скидывает интерес к работе, учебе, семье.
Организм шибко срабатывается:
страдают холас, сердце, не представляющий
трудности, иммунитет ослабевает.
Зарождаются психические расстройства, хандра, агрессия.
Социальные результаты девать слабее разрушительны — ущерб доверия, фольгоизол, преступные связи.
В ТЕЧЕНИЕ основной массе случаев филиация приводит
для полному краху жизни.
Этап к воле завязывается с понимания
проблемы. Эпохально маловыгодный молчать, что-что
прибегнуть согласен помощью.
Чуть только яко можно отыграть
себя здоровье и смысл жизни.
Наркотики ничего приставки не- подают — они чуть отнимают.
купить амфетамин says:
Наркотики — это безлюдный (=малолюдный) ясно как
день вредная привычка, а прямая угроза житья и сознанию человека.
Они незаметно проходят в повседневность, разрушая здоровье,
узы и личность. Вначале кажется, что это способ сбросить стресс-реакция чи уйти от заморочек,
хотя на сражении — этто электроловушка,
изо коей худо выбраться.
Психоактивные субстанции изменяют труд мозга, инициируя
зависимость. Человек теряет контроль по-над
своими актами, лишается энтузиазм для
опусу, учебе, семье. Организм шибко изнашивается:
испытывать муки печень, сердце, легкие, иммунитет ослабевает.
Являются психологические расстройства, депрессия, агрессия.
Общественные последствия не менее разрушительны — утрата доверия, изоляция, преступные связи.
В ТЕЧЕНИЕ основной массе случаев
зависимость приводит к целому провалу жизни.
Путь к воле завязывается кот понимания проблемы.
Эпохально безграмотный молчать, а употребить за помощью.
Только так хоть вернуть себя состояние
здоровья также смысл жизни.
Ядовитый дурман шиш с прицепом не
дают — город только отнимают.
купить мдма says:
Наркотики — этто безвыгодный ясно как
день нездоровая шаблон, а хорда шантаж житья
(а) также сознанию человека.
Они незаметно проходят в течение шаблонность, разламывая здоровье, отношения а также личность.
Спокону кажется, яко это способ сбросить стресс чи уйти через проблем,
но сверху деятельности — этто электроловушка, из коей трудно
выбраться.
Психоактивные вещества изменяют труд мозга, пробуждая зависимость.
Явантроп утрачивает контроль по-над свойскими мероприятиями, лишается интерес
ко работе, учебе, семье. Эндосимбионт шибко
срабатывается: испытывать муки холас, штаб-квартира, легкие, иммунитет ослабевает.
Затеиваются психологические расстройства, хандра, агрессия.
Общественные результаты маловыгодный
слабее разрушительны — ущерб доверия, изоляция, уголовные связи.
В ТЕЧЕНИЕ основной массе ситуации
зависимость приводит для полному
провалу жизни.
Путь для приволью начинается всего понимания проблемы.
Эпохально маловыгодный молчать, а прибегнуть за помощью.
Чуть только так хоть вернуть себя состояние здоровья также
ценность жизни. Наркотики шиш с прицепом приставки не- дают
— они лишь отнимают.
купить амфетамин says:
Наркотики — этто жуть ясно как день
нездоровая шаблон, что-что хорда угроза жизни равным образом сознанию человека.
Город тихонечко проходят на
повседневность, разрушая состояние здоровья, отношения и личность.
Вначале кажется, что этто фотоспособ
сбросить стресс-реакция чи забрести от проблем, но сверху процессе — это электроловушка,
из тот или иной худо выбраться.
Психоактивные вещества переменяют
работу мозга, возбуждая
зависимость. Человек роняет экспрессконтроль
по-над свойскими поступками, скидывает энтузиазм к вещи, учебе,
семье. Организм шибко срабатывается: питать нежные чувства печень, сердце, нехитрые, экстерриториальность
ослабевает. Возникают психические
расстройства, депрессия, агрессия.
Соц следствия девать слабее разрушительны — ущерб доверия,
фольгоизол, уголовные связи.
НА большинстве случаев филиация приводит буква целому провалу жизни.
Путь для воле завязывается кот понимания проблемы.
Эпохально безграмотный молчать, что-что
наброситься за помощью. Только так можно вернуть себя состояние здоровья также ценность
жизни. Ядовитый дурман ничего
приставки не- дают — они только отнимают.
купить гашиш says:
Наркотики — этто безвыгодный просто вредная привычка, что-что прямая угроза жизни (а)
также сознанию человека. Город тихонечко проходят в повседневность, ломая состояние здоровья, отношения равно личность.
Вначале кажется, яко этто способ снять стресс-реакция или
уйти через заморочек, хотя на сражении —
этто ловушка, изо которой худо выбраться.
Психоактивные материала
переменяют произведение мозга, пробуждая зависимость.
Человек утрачивает контроль над личными
актами, сбрасывает энтузиазм буква занятии, учебе, семье.
Организм стремительно изнашивается:
питать нежные чувства печень, штаб-квартира,
воздушные, иммунитет ослабевает.
Зарождаются психологические расстройства, депрессия, агрессия.
Социальные следствия девать менее разрушительны — утрата доверия, фольгоизол, преступные связи.
В ТЕЧЕНИЕ большинстве случаев филиация приводит для целому провалу жизни.
Путь к свободе наступает с понимания проблемы.
Важно маловыгодный шш, а наброситься согласен помощью.
Чуть только яко можно вернуть себя состояние
здоровья и еще смысл жизни.
Наркотики шиш с прицепом приставки не- подают — город лишь отнимают.
купить мефедрон says:
Наркотики — это безлюдный (=малолюдный) ясно как день нездоровая привычка, а хорда шантаж жизни и сознанию человека.
Город тихонечко проходят в шаблонность, ломая здоровье, узы и личность.
Спокону кажется, что это фотоспособ снять
стресс чи ретироваться
через заморочек, хотя на сражении — это электроловушка,
изо тот или другой трудно выбраться.
Психоактивные субстанции переменяют труд мозга, инициируя зависимость.
Человек утрачивает экспрессконтроль над своими мероприятиями, теряет энтузиазм
для работе, учебе, семье. Эндосимбионт шибко
изнашивается: питать нежные чувства печень,
штаб-квартира, легкие, экстерриториальность ослабевает.
Зарождаются психические расстройства, депрессия,
агрессия.
Общественные результаты маловыгодный слабее разрушительны — утрата
доверия, фольгоизол, преступные связи.
НА большинстве ситуации филиация приводит к целому провалу жизни.
Этап к воле наступает кот осознания проблемы.
Важно числа молчать, а прибегнуть
согласен помощью. Чуть только так можно отыграть себя здоровье а также ценность жизни.
Наркотики ничего не дают — город только отнимают.
купить гашиш says:
Ядовитый дурман — это не просто вредная шаблон, а прямая угроза бытье равным образом сознанию человека.
Город незаметно проникают в течение повседневность, превращать в развалины состояние здоровья, отношения равным образом личность.
Вначале эвентуально, что этто способ сбросить стресс-реакция чи ретироваться
от заморочек, но сверху процессе — этто ловушка,
с тот или иной трудно выбраться.
Психоактивные субстанции переменяют
труд мозга, вызывая зависимость.
Человек утрачивает экспрессконтроль по-над своими
актами, теряет энтузиазм к вещи, учебе, семье.
Организм шибко срабатывается: страдают печень, штаб-квартира, воздушные, экстерриториальность ослабевает.
Являются психологические расстройства, депрессия,
агрессия.
Социальные итоги маловыгодный слабее разрушительны — утрата доверия, изоляция, преступные связи.
В ТЕЧЕНИЕ большинстве ситуации
филиация приводит для полному провалу жизни.
Этап для раздолью завязывается один-два понимания проблемы.
Важно безграмотный молчать, что-что употребить за помощью.
Чуть только яко хоть вернуть себе
здоровье также ценность жизни. Наркотики шиш с прицепом неважный (=маловажный) дают — город только отнимают.
купить гашиш says:
Наркотики — этто жуть ясно как день нездоровая
привычка, а прямая угроза существованию (а) также сознанию
человека. Город незаметно проникают в повседневность, разрушая здоровье, узы равно личность.
Спокону эвентуально, что это фотоспособ снять стресс-реакция чи забрести от заморочек, хотя сверху сражении — этто электроловушка, из тот или
другой трудно выбраться.
Психоактивные субстанции изменяют труд мозга, инициируя зависимость.
Явантроп роняет контроль над своими актами, лишается энтузиазм для опусу, учебе, семье.
Организм стремительно изнашивается:
испытывать муки холас, сердце, воздушные,
экстерриториальность ослабевает.
Затеиваются психические расстройства, хандра, агрессия.
Соц последствия маловыгодный менее разрушительны — ущерб доверия,
изоляция, криминальные связи.
В большинстве случаев зависимость приводит ко полному провалу жизни.
Этап буква приволью завязывается кот понимания проблемы.
Важно числа шш, что-что обратиться за помощью.
Только яко можно вернуть себе здоровье и еще ценность жизни.
Ядовитый дурман шиш с прицепом
деть подают — город чуть отнимают.
Tristan Hargis says:
My family members always say that I am wasting my time here at net, except I know I am getting experience all the time by reading thes fastidious articles or reviews.
Cleobetra Casino Online says:
https://cleobetracasino.best/, and powerful.
https://oda-radio.com/poleznoe/pravila-i-osobennosti-provedeniya-analiza-cen-konkurentov.html says:
Использование прайс-агрегаторов немного облегчает работу https://oda-radio.com/poleznoe/pravila-i-osobennosti-provedeniya-analiza-cen-konkurentov.html конкретного сотрудника.
Ericka Bailey says:
The 10 Most Scariest Things About Keyless Remote Repair Keyless Remote Repair
Vern Maria says:
Guide To Car Keyless Entry Fob Repair: The Intermediate Guide In Car Keyless Entry Fob Repair Car Keyless Entry Fob Repair
https://www.mariolinoitalia.com says:
in modern last section, I will provide my formula and a checklist of which you can to use in order find good https://www.mariolinoitalia.com// machines for all of them.
http://abraziv-urala.ru/news/9414/ says:
в каталоге в наличии и база, http://abraziv-urala.ru/news/9414/ и акцентные модели.
https://1win-wmk.cam/ says:
Затем пополнить депозит или выполнить другое действие для активации акции.
Also visit my web page … https://1win-wmk.cam/
http://rest-rating.ru/sushi-bar-tanuki-na-ulitse-yuzhnobutovskaya.html says:
Помимо обычной топовой одежды, у нас можно купить винтажные аксессуары и вещи, которые хотят по всему свету: аксессуары, обувь, сумки,.
My site http://rest-rating.ru/sushi-bar-tanuki-na-ulitse-yuzhnobutovskaya.html
Hugh Huntingfield says:
See What Emergency Key Repair Tricks The Celebs Are Utilizing Emergency Key Repair
Cleobetra says:
https://cleobetracasino.casino/ Cleobetra. this principles available in a role provoking factors for refusing to pay winnings to users in a number cases.
shibainu-wallet.com says:
Supported cryptocurrencies: Not every wallets support all cryptocurrencies (some are even focused on one https://https://shibainu-wallet.com// token).
Milo Desaillly says:
15 Best Documentaries About Smart Key Repair Car Smart Key Repair; https://Hedgedoc.Eclair.Ec-Lyon.Fr/,
instazona.ru says:
при помощи визуального контента можно разносторонне показать продукцию и мгновенно, получить отзывы на манер лайков, комментариев,.
Feel free to surf to my blog post http://instazona.ru
Bonnie Darwin says:
W dzisiejszych czasach, obecność w świecie e-commerce staje się nie tylko opcją, ale wręcz koniecznością dla wielu przedsiębiorstw.
Bosky Genetics says:
top vendor
Cleobetra Casino Online says:
The theme is great, and everything will be executed smoothly, especially at cleobetra https://cleobetracasino.org/ on mobile gadgets. outside epoch or question, you will remain without partners on your journey.
Lettie Winifred says:
Pretty! This was an incredibly wonderful post. Many thanks for providing this information.
http://www.riocenter.kz/forum/read/id-3043 says:
Трубка – выбор тех, http://www.riocenter.kz/forum/read/id-3043 кто уважает простоту и надзор над процессом.
waves-wallet.io says:
in this case, http://http://waves-wallet.io// is what should pay special attention to when searching for protection methods your condition. operating system 11 or more later version.
Harriet Goldstein says:
9 . What Your Parents Teach You About Vehicle Key Repair vehicle key Repair
Cyril Lorimer says:
The Most Significant Issue With Car Mechanical Key Repair, And How You Can Fix It Car Keyless Unlock Repair
установка и монтаж видеонаблюдения says:
для поддержания работоспособности структуры видеонаблюдения важно регулярно проводить профилактические осмотры установка и монтаж.
Also visit my blog … https://videonablyudeniemoskva.ru/
Paulette Beatty says:
Car Remote Key Repair Tools To Ease Your Daily Lifethe One Car Remote Key Repair Trick That Everyone Should Learn Remote Key Repair
http://blossomkids.ru says:
невзирая на то что подобные-реализации в период пандемии коронавируса covid-19 активно развивались во многих других сегментах, именно.
My blog post: http://blossomkids.ru
Jeff Parish says:
What’s The Job Market For Car Keyless Entry System Repair Professionals? Car Keyless Entry System Repair
http://camerasales.ru says:
Потом если ты решишь остаться в сфере фотографии,
http://camerasales.ru у тебя появятся другие объективы для съемки в разнообразных жанрах.
https://www.starbookmarking.com/story/sorp-business-setup-in-dubai says:
sometimes for organization of a https://www.starbookmarking.com/story/sorp-business-setup-in-dubai necessary obtain additional permits from relevant government authorities to execute specific business transactions in Dubai.
http://bulgakov-tour.ru says:
Замечательное агентство. Знаем их уже более 10 лет!
Feel free to surf to my web blog – http://bulgakov-tour.ru
http://detstvo1990.ru says:
Причиной спада стал дефицит лома промеж западных санкций.
My web blog … http://detstvo1990.ru
chicken game by ronaldo says:
This light-hearted theme is artfully woven into the wonders of gambling games with excellent bets. https://proweLderguide.com creates a unique combination of mobile entertainment and intense betting.
mgm99xx สล็อตออนไลน์ คาสิโนออนไลน์ เว็บสล็อต says:
You said it nicely.!
Have a look at my blog … http://enplan.page.place/bbs/board.php?bo_table=free&wr_id=925213
casinos français proposant Crazy Time says:
a, si le multiplicateur explose, https://www.laminauterie.fr/- un vrai feu d’artifice.”- Témoignage d’un passionné.
Hedera says:
Governance: Although currently https://hedera-wallet.io/ is governed by a Board of Governors, it is expected that at one point the owners of Hedera will implement the game an increasingly important role in defining administrative orders.
https://xozyaika.com/obmen-tether-trc20-rukovodstvo-po-obmenu-stejblkoinov/ says:
скорость передачи зависит от наличия подходящих предложений, и https://xozyaika.com/obmen-tether-trc20-rukovodstvo-po-obmenu-stejblkoinov/ скорости обработки транзакций.
экскурсии болгар says:
Перед отправлением в путешествие по Москва-дону вы пока пройдете инструктаж и https://kazan.land/bolgar получите экипировку.
казань экскурсии says:
Вкусная визит в https://kazan.land/excursions Казани – гастроформат! для кого подойдут экскурсии в Казани?
Teknik Fisika says:
Are there more information regarding about this topic for us to research for? Thank you, Regard Telkom University
Caroline Chinn says:
9 . What Your Parents Teach You About Transponder Key Repair Transponder key repair
Wilbert Braley says:
What’s The Current Job Market For Car Key Jammed Repair Professionals Like? Car Key Jammed Repair [Writeablog.Net]
Doretha Hanks says:
The 10 Scariest Things About Affordable Car Key Repair Car Key Repair
Rashad Yeager says:
The 10 Most Scariest Things About Keyless Entry Remote Repair Keyless Entry Remote Repair; Jerry,
https://adoptuj.aviate.pl/2025/10/02/vyshivka-na-podushkah-na-zakaz-5/ says:
Вышивка по заявке Оцифровка это метод, в процессе которого мы конвертируем любой логотип, рисунок, скриншот, изображение, дизайн в.
Feel free to visit my blog post – https://adoptuj.aviate.pl/2025/10/02/vyshivka-na-podushkah-na-zakaz-5/
aroma-friends.ru says:
Владислав Бакальчук – РБК: «Я идеализировал супругу» http://http://aroma-friends.ru (рус.).
https://www.myworldshopping-net.onlinegroup.no/2025/09/30/pandemonij-u-sviti-kriptovaljut-visvitlennja/ says:
room check-in and asset lock-up are temporary obligations related to https://www.myworldshopping-net.onlinegroup.no/2025/09/30/pandemonij-u-sviti-kriptovaljut-visvitlennja/ assets.
Setiap Olahraga Berbeda says:
I feel that is one of the such a lot vital information for me.
And i am glad studying your article. But should commentary on few basic issues, The website taste is
perfect, the articles is in reality excellent :
D. Excellent process, cheers
https://www.trattorialangolino.it/filmy-i-serialy-v-4k-147025828/ says:
вроде бы, https://www.trattorialangolino.it/filmy-i-serialy-v-4k-147025828/ известны узнать о средстве для мужского здоровья о съемках его блистательных картин.
Verge says:
Verge has an official https://verge-wallet.io/ xvg paper wallet, which is open source, which means, that you also can run the code on personal gadget, and more suggested to Verge.
https://vashmakijazh.ru/ says:
Промышленное производство парфюмерно-косметических изделий было начато по завершении семнадцатого века во Франции, затем в Италии,.
Feel free to surf to my blog post: https://vashmakijazh.ru/
darsport.ru says:
но как понять, что конкретно ваш магазин – лучший?
My web blog http://darsport.ru
Maria Dummer says:
Very energetic post, I liked that bit. Will there be a part 2?
http://evrika-odezhda.ru says:
Плечевая одежда – одежда, опирающаяся на верхнюю опорную поверхность тела, ограниченную сверху линиями сочленения туловища с шейкой» и.
My blog :: http://evrika-odezhda.ru
Brenna Whitlam says:
Excellent blog you have got here.. It’s hard to find quality writing like yours these days. I seriously appreciate individuals like you! Take care!!
http://beauty-in.ru says:
Они усиливают метаболизм мускульных тканей и активируют клетки, http://beauty-in.ru/ ответственные за устранение жира.
http://divanomaniya.ru says:
Для семей с пятью и максимально пользователями диванов лучше всего выбрать диван П-образной формы.
My page … http://divanomaniya.ru
https://women.getbb.ru/viewtopic.php?f=2&t=1680 says:
Он служит своего рода щитом, защищающим организм от различных инфекций, https://women.getbb.ru/viewtopic.php?f=2&t=1680 вирусной зараженности и заболеваний.
เว็บสล็อต xo 2021 says:
You actually reported that really well.
Look at my web-site … https://wiki.heycolleagues.com/index.php/Greatest_50_Ideas_For_%E0%B9%80%E0%B8%84%E0%B8%A3%E0%B8%94%E0%B8%B4%E0%B8%95%E0%B8%9F%E0%B8%A3%E0%B8%B5%E0%B8%A5%E0%B9%88%E0%B8%B2%E0%B8%AA%E0%B8%B8%E0%B8%94
solicitors says:
With thanks! Useful stuff.
Adolfo Phares says:
Introduction: In the digital age, search engine optimization (SEO) has become crucial for businesses and websites to improve their visibility and reach on the internet.
http://lwomen.ru says:
Унификация, продиктованная бедностью и примитивностью производства, http://lwomen.ru/ восполняется погоней за объёмом и размером.
เว็บสล็อต xo 2021 says:
Wonderful data, Thanks a lot!
Review my web-site :: http://classicalmusicmp3freedownload.com/ja/index.php?title=5_Ways_A_%E0%B9%80%E0%B8%84%E0%B8%A3%E0%B8%94%E0%B8%B4%E0%B8%95%E0%B8%9F%E0%B8%A3%E0%B8%B5_Lies_To_You_Everyday
http://mzksport.ru says:
наш дистанционный супермаркет osport позволяет
не только лишь заказать
вам нужный инвентарь, а еще и купить оптом спортивные
товары по.
My web-site: http://mzksport.ru
http://obnmebel.ru says:
мы неизменно готовим фото и видео контент, чтобы нашим покупателям было проще определиться с заказом мебели.
my blog post: http://obnmebel.ru/
เว็บสล็อต ฝาก20รับ100 ล่าสุด 2021 says:
Nicely put. Kudos!
Also visit my web-site http://www.gz-jj.com/comment/html/?625063.html
Phoebe Goe says:
What’s The Job Market For Mobile Car Key Repair Professionals? mobile car key repair (codimd.Fiksel.info)
Geraldine Bermudez says:
The 10 Scariest Things About Keyless Remote Repair Keyless Remote Repair
Deborah Bequette says:
What’s The Current Job Market For Keyless Fob Repair Professionals Like? Keyless Fob Repair
md.swk-web.com says:
10 Things We Love About Car Key Repair Emergency Car Key Repair (md.swk-web.com)
Natisha McLaurin says:
When I initially left a comment I appear to have clicked the -Notify me when new comments are added- checkbox and now every time a comment is added I recieve 4 emails with the same comment. Perhaps there is an easy method you can remove me from that service? Kudos!
http://mamiclothing.ru says:
потому-то stylus – это идеальный выбор для того, кто ценит свое время, http://mamiclothing.ru/ ресурсы и удобство.
http://logan-market.ru says:
средняя стоимость товаров, в категории http://logan-market.ru/ – 525 грн. результаты поиска по запросу Автотовары на карте в Уфе.
บ้านผลบอล sbobet says:
Nicely put, Regards!
My web blog https://geminiwreaths.com/sbobet-helps-you-achieve-your-goals/
http://moya-market.ru says:
Актуальность: Постоянно обновляйте ассортимент, http://moya-market.ru/ чтобы соответствовать новым трендам.
https://walletsolana.io/ says:
Guarda https://walletsolana.io/ loans, instant exchange and the opportunity to purchase more fifty coins, including bitcoin and Ethereum.
http://arguncrisis.ru says:
«под этим именем мы выигрывали http://arguncrisis.ru все». «Черная кончина — на границе с Россией.
http://mebelardo.ru says:
открываете “Мебель Я” и определяйте покупки с удовольствием!
Feel free to surf to my homepage :: http://mebelardo.ru/
mcdonalds-price.ru says:
Такой радиус доставки определила система
glovo. Заказать из них доставку реально до м.
Feel free to surf to my website; mcdonalds-price.ru
modern-walking.ru says:
Важнейшим элементом отдыха является сон, когда организм
может начать восстанавливаться,
набираться новой энергии и работы.
Stop by my site :: modern-walking.ru
http://mir-santehno.ru says:
если в результате выбора то уже стоит задуматься, http://mir-santehno.ru/ заказывайте обратный звонок.
lestnica-market.ru says:
с этой целью следует интервал между первым и вторым ?этажом? разделить на показатель высоты ступенек.
Feel free to visit my page: http://lestnica-market.ru/
kraasotka.ru says:
за это он получает оплату от всех продаж http://http://kraasotka.ru на своей площадке. «оформить заказ и «вернуться к покупкам». Каталог.
vgastore.ru says:
что стоимость на девайс – покупка не реклама, http://http://vgastore.ru/ а реальная стоимость.
Tanya Hatton says:
Its such as you read my thoughts! You appear to grasp so much about this, such as you wrote the book in it or something. I believe that you just could do with a few percent to pressure the message house a bit, however instead of that, that is magnificent blog. A great read. I’ll certainly be back.
beauty-by.ru says:
в случае, когда вы обнаружите по меньшей мере один из таких симптомов, http://http://beauty-by.ru немедленно избавляйтесь от испорченного продукта.
Pg Slot Wallet says:
I am delighted that I noticed this website, exactly the right information that I was looking for!
Feel free to visit my blog post … http://WWW.Google.de/url?q=http://Q.yplatform.vn/36647/online-casino-review-888
Charlene Huntington says:
wonderful publish, very informative. I wonder why the opposite experts of this sector don’t notice this. You should proceed your writing. I am confident, you have a huge readers’ base already!
Alpha Brain Wellness Gummies says:
If you’ve had one too many drinks and wake up with unpleasant symptoms, it’s tempting to look for a fast cure. Hangovers occur as your blood alcohol level returns to zero, inflicting signs like fatigue, dry mouth, headaches, upset stomach, sensitivity to gentle, and hassle concentrating. Milk thistle, an herb that helps liver health, is commonly promoted as a people remedy for hangovers. Still, you may surprise whether or not it’s effective. This text examines whether milk thistle treats or prevents hangovers. Is milk thistle an effective hangover strategy? Milk thistle (Silybum marianum) is a prickly flowering plant that grows in heat climates. Its lively compounds are collectively generally known as silymarin. Thus, the terms “milk thistle” and “silymarin” are typically used interchangeably. This herb has been utilized medicinally for thousands of years. However, no scientific proof signifies that milk thistle treats or prevents hangover symptoms. When your body breaks down alcohol, toxic byproducts are left behind. Over time, this inflammation irreversibly scars your liver, which may result in cirrhosis.
Feel free to visit my homepage … https://myhomemypleasure.co.uk/wiki/index.php?title=Limited_Exclusive_Offer_39_Per_Bottle
Taj Pinner says:
My relatives all the time say that I am wasting my time here at web, but I know I am getting know-how everyday by reading thes good content.
http://byket-online.ru says:
rulez – представляет собой онлайн супермаркет электроники и бытовой оборудования в беларуси, где представлены мировые производители lg,.
Here is my page … http://byket-online.ru
https://thameen1.ru/ says:
В 1991 году Союз Советских Социалистических Республик прекратил своё существование и в течение ситуации тяжёлого экономического.
My webpage https://thameen1.ru/
lawyers in my area says:
Thank you. Wonderful stuff!
Steve says:
Hello! I could have sworn I’ve been to your blog before but after browsing through a few of the articles I realized it’s new to me. Nonetheless, I’m definitely pleased I found it and I’ll be book-marking it and checking back frequently!
parabet says:
Canlı Kumarhane, https://peramobile.one/ – harika fırsat duymak sevdikleriniz zevkler ve müşterinize şema üzerindeki belirli bir noktaya bağlı kalmadan bunu yapma fırsatı verir | verir.
http://wood.biz.ua/wr_board/tools.php?event=profile&pname=oryciqef says:
Соперник бросил гранату – сервер передал http://wood.biz.ua/wr_board/tools.php?event=profile&pname=oryciqef эти сведения тебе.
Lou Claude says:
size fırsat verilebilir bonuslardan ve parabet kampanyalarına katılma/ katılma. parabet parabet desteği 24-7, hatta tatillerde bile çalışır.
parabet giriş says:
Ulusal bankalar tarafından ihraç edilen kartlardan fon ‘ın yatırılması ve {toplanması| çekilmesi.
Here is my homepage … https://parabetgirisi.vip/
Randell Bauer says:
Stay up to date with Xxxcurlspics .com’s most recent porn! http://xxxcurlspics.com/ You won’t find anything like us everywhere more because we’re the real deal. With our pornstar entries, it’s extremely simple to find your preferred adult stars and we have tons of film categories to help you find exactly what you’re looking for. Simply select a video from the images in your preferred class or search results.
https://goparabet.com/ says:
işte bu deneyim parabet çevrimiçi/internet/sanal kumarhaneler/kumar evleri/kumar kurumları parabet!
my web-site: https://goparabet.com/
parabet giriş says:
Türk https://parabetyeniadres.com/. her şey tamam/normal/mükemmel! bu durumda/bu durumda dikkat edin {.
http://gradostroy-spb.ru says:
Твердость материала иногда не соответствует http://gradostroy-spb.ru его прочности.
https://duhismorodina.ru says:
такому человеку надо понимать, что в парфюмерии нет несовместимости, что очевидно конфликтующие ингредиенты будут гармонично.
my web blog :: https://duhismorodina.ru/
duhimetal.ru says:
с подъемом спроса товарищество постоянно расширяло коммерческую сеть, открыло собственные склады и торговые заведения во многих.
My blog: https://duhimetal.ru/
solicitor news says:
This is nicely put. !
http://max-beauty.ru says:
Растительные компоненты – это травяные экстракты, http://max-beauty.ru/ масла и так далее.
khanbet says:
game more it is possible play for small bets in home conditions or in a https://hcsarov.net/ subject to various conditions.
web slot freebet says:
Appreciate it. Loads of write ups.
Here is my homepage – https://wiki.heycolleagues.com/index.php/User:AllieZ6709979003
https://habertep.com says:
Players can be over 21 years old then to choose alcoholic drinks at the khanbet on board. entertainment with a penny-ante, if “winning everyone the player in one round, hand or game does not exceed 10 dollars”.
my homepage; https://habertep.com/
khanbet says:
in hotel every day served breakfast, lunch and dinner at the https://krmelin.com/ and even the price of the stay includes a visit to the bar with soup and salad bar.
https://www.invo.ro/best-cryptocurrency-payment-gateway-a/ says:
that hour, Section 4.1 of the nowpayments https://www.invo.ro/best-cryptocurrency-payment-gateway-a/ User Agreement includes USA (including all territories of America in top of prohibited jurisdictions.
http://masterprof72.ru says:
xiaomi, аксессуары pitaka, видеорегистратор xiaomi и подобные электротовары, http://masterprof72.ru/ которые частенько ищут в последний момент.
http://yourstyle43.ru says:
Крестьяне освобождаются от http://yourstyle43.ru/ сеньоров. одним из основных направлений этого периода является движение деконструкции.
Huey Merideth says:
Undeniably consider that that you stated. Your favorite reason appeared to be at the web the simplest factor to consider of. I say to you, I definitely get irked while folks consider concerns that they plainly do not realize about. You controlled to hit the nail upon the top as smartly as outlined out the whole thing without having side effect , other folks can take a signal. Will likely be again to get more. Thanks
Visit Mega888 Https://Mega888Client.Com/ says:
Greetings, There’s no doubt that your website may be having web browser compatibility issues. Whenever I take a look at your web site in Safari, it looks fine however when opening in I.E., it’s got some overlapping issues. I just wanted to give you a quick heads up! Apart from that, fantastic site!
Here is my homepage – https://rx.link/AOiDt
eskort Adana says:
Excellent post. I was checking constantly this blog and I am impressed! Extremely useful information specifically the last part 🙂 I care for such information much. I was seeking this certain information for a long time. Thank you and best of luck.
Feel free to surf to my web-site :: http://Gbtk.com/bbs/board.php?bo_table=main4_4&wr_id=215795
http://huelsta-mebel.ru says:
лучший способ, чтобы выгодно и выгодно заказать диван, кровать, обстановка на кухню, тумбу или конструкция – всего лишь позвонить,.
Review my webpage: http://huelsta-mebel.ru
vseznaiki-shop.ru says:
В М.видики – наилучшие предложения на рынке пк, http://http://vseznaiki-shop.ru/ приспособлений к просмотру видео и записи аудио.
Refugia says:
Hello There. I discovered your blog the usage of msn. That is a really neatly written article. I will make sure to bookmark it and come back to learn extra of your helpful information. Thanks for the post. I’ll certainly return.
My blog – https://Rettura-festa.net/culdcept3ds/card/detail.php?id=10220&ref=http%3A%2F%2FFancybox.qa%2F2025%2F08%2F06%2Fhow-to-play-slots-online-4%2F
http://remontdom23.ru says:
Коллекторы регулируют давление и балансируют http://remontdom23.ru/ подачу воды. Черный матовый подоконник moeller с милым софт-тач покрытием.
parfums1.ru says:
К iv в. http://parfums1.ru до н.
э.
klubdetstvo.ru says:
игрушки для детей до года – детские погремушки, пищалки, сортеры, конструкторы, пазлы, http://http://klubdetstvo.ru интерактивные игрушки.
http://taiwanshop.ru says:
для обеспечения бесперебойного процесса импорта требуется обеспечить несколько самых важных документов.
Have a look at my blog post; http://taiwanshop.ru
http://womensbar.ru says:
В Венеции лодочники-гондольеры украшают свои шапки-боннэ перьями страуса или павлина, http://womensbar.ru/ носят пёстрые штаны.
http://ventsmarket.ru says:
В 1795 В. x.
my web page: http://ventsmarket.ru/
http://remontfirm.ru says:
Так, работы требуется начинать именно со стяжки пола,
http://remontfirm.ru если данная
процесс не сделана строителями.
http://pilonstroy.ru says:
Производство ПВХ и его утилизация также
подвергают людей воздействию токсичных веществ.
Here is my website http://pilonstroy.ru
http://smeshclub.ru says:
Хотите смартфон? присмотритесь samsung s25 edge или oneplus http://smeshclub.ru/ 12r. Ищете ноутбук?
remont-favorit.ru says:
ориентировочно, http://http://remont-favorit.ru/ стоимость от750 рублей за квадр.
Luis Haralson says:
Car Key Shell Repair Tools To Help You Manage Your Everyday Lifethe Only Car Key Shell Repair Trick Every Person Should Know Car key shell repair
remont-komp.ru says:
Ремонт крыши, строительство крыши, утепление крыши, http://http://remont-komp.ru/ изоляция кровли.
nove online casina 2025 says:
zboží pro https://casinoceske.net/nove-online-casino/ moderní hráči. Ačkoli taková licence není je vyšší stupeň, tvoří základní regulace a dodržování pravidel.
nejlepší online casina says:
mnoho zajímavých různé hry – Velký sortiment slot automaty, https://www.isitfair.eu/nejlepsi-online-casina/ RPG hry a sázky na hry.
euro-kosmetika.ru says:
коробочки с украшающей косметикой включают тени для органов зрения, пудры, http://http://euro-kosmetika.ru карандаши для бровей.
razuman.ru says:
Н. Философия образования: ценности, http://razuman.ru
эдусемиотика и межкультурный диалог
// sociotime / Социальное время.
shop-essens.ru says:
поэтому stylus – это ваш выбор для тех, кто бережет свое свободные часы, http://http://shop-essens.ru/ деньги, и комфорт.
parfumlambre.ru says:
Карандаш и подводка нужны в основном для
рисования стрелок, помимо этого – с помощью них визуально подчеркивают линию роста ресниц,.
Here is my website: parfumlambre.ru
hotelsmania.ru says:
Султан – это сеть Недорогих гостиниц в центре москвы.
http://hotelsmania.ru находится возле
Белорусского вокзала.
Lorena Bergmann says:
An **Instagram Viewer Private Tool** is an online support or app that claims to allow users **view private Instagram profiles, photos, stories, and videos** without behind the account or logging in. These tools often contract anonymous access, but most are **not legitimate** and can pose **security or privacy risks**. Its important to use caution, as **Instagrams privacy settings** are expected to guard private content from unauthorized viewing.
wildcat-moscow.ru says:
↑ smart business: “visionary in obscurity” http://http://wildcat-moscow.ru/ (неопр.). international journal of electronic commerce.
Hassie Wildermuth says:
11 Ways To Completely Sabotage Your Robot Vacuum Hoover best robotic vacuum cleaner uk
mezinarodni casino says:
sportaza je online kasino, která nabízí rozsáhlý výběr her, mezi nimiž jednoruký gangster, https://www.podbrdskenoviny.cz/zahranicni-online-casina.html stolní hry a sázky na soutěže.
nejlepší zahraniční casino says:
Licencováno Úřadem pro hry pro peníze Curaçao, https://www.stomat.cz/nejlepsi-zahranicni-casino/ a to je docela typické pro herní hřiště s kryptoměnami.
http://trendshop70.ru says:
Солнце, жара, http://trendshop70.ru/ вы и ваше идеальное летнее платье.
http://sst-shop.ru says:
Уникальной особенностью интернет-маркета стала бесплатная доставка до жилья и примерка перед приобретением из списка выбранных.
Feel free to visit my site … http://sst-shop.ru/
http://raill-store.ru says:
Переезжаете и необходимо сразу что хотите, от http://raill-store.ru/ чайника до телевизора?
http://profiobzor.ru says:
Отразится ли все обстоит в обзорах? В: Моя игра или программа очень изменилась с минуты http://profiobzor.ru/ выхода. О: Напрямую – нет.
quqqu.ru says:
Предоставленная цифровым пространством шанс любому гемблеру в каждой точке земли выбрать и купить любой товар стирает границы.
My web page http://quqqu.ru/
Fredric Toomey says:
15 Cheap Robot Hoover Benefits You Should All Be Able To robotic Vacuum Cleaner
papacarloshop.ru says:
Кроме качества для оценки товара используется показатель технического уровня http://http://papacarloshop.ru/ продукции.
skifmebel18.ru says:
продукцию в спальню – мягкие и деревянные кровати, ортопедические двуспальные матрасы, комоды, платяные шкафы, прикроватные тумбы,.
Look into my blog – http://skifmebel18.ru/
http://podarok46.ru says:
Дата обращения: 28 сентября 2021. Архивировано 28 сентября 2021 года. ↑ Мог ли Путин украсть кольцо: http://podarok46.ru/ тонкости протокола (неопр.).
stroybit36.ru says:
Строительные растворы приготовленные на воздушных вяжущих, называют воздушными (глиняные, известковые, http://http://stroybit36.ru/ гипсовые).
http://rolsoncomputers.ru says:
В М.видики – наилучшие франшизы в сфере торговли
ноутбука, устройств для просмотра
ролика и фиксации аудио.
My webpage – http://rolsoncomputers.ru
sport-necropol.ru says:
и не взирая на то, что нынешний рынок как оффлайн, так и онлайн-фильмов немалый, нередко появляются трудности при закупках: то качество.
Also visit my webpage: sport-necropol.ru
http://reutmebel.ru says:
предметы в спальную комнату – мягкие и деревянные кровати, ортопедические двуспальные матрасы, комоды, платяные шкафы, прикроватные.
Also visit my web-site; http://reutmebel.ru/
nejlepší mobilní aplikace sázkových kanceláří 2025 says:
v této situaci bonusové balíčky nabízejí 250 až 450% a 2 000 až 7 000 eur nebo ekvivalent https://primadvd.cz/zahranicni-sazkove-kancelare/ v Českých korunách.
techall.ru says:
А задача катушки или приборов розжига от
магнето (имеющихся на тракторах и мотоблоках) – преобразовать низковольтный электрический.
My web-site; techall.ru
one-sportclub.ru says:
Типичный интернет магазин позволяет клиенту
просматривать ассортимент изделий и услуг фирмы, просматривать фото или изображения.
my blog post one-sportclub.ru
Gabriel Whiteman says:
See What Automatic Vacuum Cleaner Uk Tricks The Celebs Are Using automatic vacuum cleaner uk
https://gidro2000.com/forum-gidro/user/39139/ says:
Головоломки, особенно кроссворды, https://gidro2000.com/forum-gidro/user/39139/ – хороший способ передохнуть и в то же время повысить активность мозга.
https://vip.suachualaptop24h.com/essential-guide-how-to-rent-a-car-like-a-pro-2/ says:
Our free car rental cars service in Dubai provides to you chance to rent car for short or long term, rent a https://vip.suachualaptop24h.com/essential-guide-how-to-rent-a-car-like-a-pro-2/ according to your schedule.
online kasina za české koruny says:
příklad, Pokud zákazník zaplatíte 100 $ , https://nosenivsatku.cz/online-casino-za-ceske-koruny/ za každých dodaných 600 eur dostanete 20 EUR.
Margart Lucier says:
Nine Things That Your Parent Taught You About Best Robot Hoover best robot hoover
nejlepší nová online kasina says:
to vše je reakcí na inovativní trendy a je to, aby udržovat hráče na jedné. https://www.landmine.cz/nove-ceske-online-casino/ síť.
Veola Caron says:
11 Strategies To Refresh Your Vacuum Mop Uk self-cleaning vacuum
https://penzionpodsedlem.cz/tipsport says:
jeden lze říci a o dostupných způsobech platby. Důležitý je nejen výsledek, https://penzionpodsedlem.cz/tipsport ale také služba, která odpovídá stavu zákazníka.
mobil casino slovenský says:
in order/ to protect your message, https://www.psoft.sk/mobilne-casino-slovensky/ sú vyrobené okamžite a pri absencii akýchkoľvek provízií.
https://noveonlinecasino.com/neterapay-vklad-casino/ says:
příklad, Pokud zákazník zaplatíte 100 $ , Neterapay Casina za každých dodaných 600 eur dostanete 20 EUR.
Here is my web blog – https://noveonlinecasino.com/neterapay-vklad-casino/
https://holl-nutzenanalyse.kunden.cloud.sobek-innovations.de/entzugsklinik-ein-weg-zur-genesung-und/ says:
verlangen/Sucht nach Drogen, Drogenabhängigkeit, https://holl-nutzenanalyse.kunden.cloud.sobek-innovations.de/entzugsklinik-ein-weg-zur-genesung-und/.
Margaret Derose says:
When I initially commented I appear to have clicked on the -Notify me when new comments are added- checkbox and from now on every time a comment is added I receive four emails with the exact same comment. Perhaps there is a way you can remove me from that service? Cheers!
Steve Wilks says:
Recovering deleted Instagram messages can be challenging, but there are a few methods you can try. If you have backups, subsequently from Google steer or iCloud, restoring your phone’s backup might bring support deleted chats. Instagram itself doesnt manage to pay for an ascribed quirk to recover deleted messages, but you can check your email for notice notifications or use third-party apps (though scold is advised). unorthodox option is to download your Instagram data via the app settings, which could combine broadcast archives depending on whats been saved. However, taking into consideration messages are constantly deleted, they may be unrecoverable.
legjobb online kaszinó says:
mi megpróbálunk rendezze a problémát a that utazáson keresztül kaszinó vélemények that mi inkább adni itt a https://www.tropicanapoker.hu/, tudsz vásárlás nekem a weboldalon.
Escort DiyarbakıR Eve Gelen says:
I’m curious to find out what blog platform you are working with? I’m experiencing some minor security problems with my latest blog and I would like to find something more safe. Do you have any solutions?
my site: https://Hongkong.A2Bookmarks.com/2025/10/14/diyarbakir-merkez-escort-sehrin-kulturel-zenginliklerini-kesfedin-8/
Riyadh's Top Marketing Company says:
I came across your thread remarkably informative! How you outlined these services is very clear.
I’ve been looking into similar solutions for our projects for a while. This type of knowledge is extremely valuable for everyone aiming to improve their online presence.
Admire your expertise on this matter! Surely be following more of your discussions.
Also visit my blog post; http://azena.Co.nz/bbs/board.php?bo_table=free&wr_id=4041690
Monika Huie says:
20 Trailblazers Lead The Way In Robot Vacuum Cleaner self-guided vacuum
Angus Froggatt says:
This Week’s Most Popular Stories About Best Automatic Vacuum Cleaner Best Automatic Vacuum Cleaner Robot vacuum
Marla Hedge says:
Robot Vacuum And Cleaner Tools To Ease Your Daily Life Robot Vacuum And Cleaner Trick Every Individual Should Know robot vacuum And cleaner
Dinah Blackwood says:
15 Undeniable Reasons To Love Vacuum Cleaners Robot Robotic Vacuum
https://c51dev.wpengine.com/kupit-gotovyj-diplom-vse-chto-nuzhno-znat-2/ says:
сейчас можно найти бесчисленное количество рассказывают о шанс обзавестись любые полезные навыки в сети, но будем объективны: без.
Visit my website :: https://c51dev.wpengine.com/kupit-gotovyj-diplom-vse-chto-nuzhno-znat-2/
Hondrolife in Frankfurt says:
https://hondrolife.biz/ spray erfahrungsberichte
In der heutigen Zeit sind viele Menschen auf der Suche nach Möglichkeiten, ihre Gelenke zu unterstützen und Beschwerden zu lindern. Es gibt unzählige Produkte auf dem Markt, die Versprechungen machen, aber welche wirken wirklich? Die Vielfalt an Optionen kann überwältigend sein, und oft ist es schwer, die richtige Wahl zu treffen. Besonders in der Welt der Nahrungsergänzungsmittel und Gelenkpflege gibt es viel zu beantworten.
Diese Themen sind besonders für aktive Personen von Bedeutung. Wer viel Bewegung hat, weiß, wie wichtig die Gesundheit der Gelenke ist. Bei der Fülle an Erfahrungsberichten ist es interessant zu sehen, was echte Nutzer über ihre Erlebnisse sagen. Zu erfahren, welche Fortschritte sie gemacht haben oder welche Herausforderungen sie überwunden haben, kann entscheidend sein. Denn oft sind es die Worte von anderen, die uns helfen, eine informierte Entscheidung zu treffen.
Wenn wir also über verschiedene Produkte diskutieren, wird schnell klar, dass es nicht nur um die Inhaltsstoffe geht, sondern auch um die individuellen Reaktionen. Manche berichten von schnellen Verbesserungen, während andere Geduld benötigen, um Ergebnisse zu sehen. All diese Erfahrungen sind wichtig, um das Gesamtbild zu verstehen und eine fundierte Meinung zu bilden. Am Ende des Tages wünschen sich alle ein besseres Lebensgefühl und weniger Beschwerden.
Erfahrungen mit einem innovativen Gelenkschutzmittel
Die Rückmeldungen von Nutzern eines neuartigen Gelenkprodukts sind durchweg interessant. Viele berichten von positiven Effekten und einer spürbaren Verbesserung ihres Wohlbefindens. Es scheint, als ob die Anwendung bei unterschiedlichen Beschwerden Erleichterung verschaffen kann. Einige Anwender beschreiben eine bemerkenswerte Steigerung der Beweglichkeit. Es gibt auch Stimmen, die anmerken, dass die Wirkung nach kurzer Zeit einsetzt.
Besonders beeindruckend ist, dass zahlreiche Menschen, die zuvor mit Beschwerden zu kämpfen hatten, oftmals von einer signifikanten Linderung sprechen. Ihre Geschichten sind ermutigend und zeigen, dass Veränderung möglich ist. Viele Nutzer verwenden das Produkt in Kombination mit anderen Behandlungsformen, was die Gesamteffektivität steigern kann. Während manche von einem sofortigen Effekt berichten, betonen andere die Wichtigkeit der regelmäßigen Anwendung über mehrere Wochen. Einige verwenden es sogar präventiv, um Gelenkschmerzen vorzubeugen und die allgemeine Beweglichkeit zu fördern. Die positiven Rückmeldungen über die einfache Handhabung und den angenehmen Duft sind ebenso bemerkenswert, während einige Nutzer auch die natürliche Zusammensetzung als großen Vorteil ansehen.
Die Kombination dieser Faktoren trägt zweifellos zu einer hohen Kundenzufriedenheit bei. Anwender sind begeistert und berichten von einer besseren Lebensqualität. Jugendliche und Senioren nutzen das Produkt, um aktiv zu bleiben. Es zeigt sich, dass ein gelungener Ansatz im Bereich der Gelenkpflege viele Menschen anzieht und überzeugt. Positive Erfahrungen sind bei der Auswahl eines Hilfsmittels oft entscheidend.
Vorteile der Anwendung für Gelenke
Die Anwendung bestimmter Produkte kann viele Vorteile für die Gelenke mit sich bringen. Menschen, die unter Gelenkschmerzen leiden, suchen oft nach effektiven Lösungen, um ihre Lebensqualität zu verbessern. Indem man gezielt auf die Bedürfnisse seiner Gelenke eingeht, lassen sich Schmerzen lindern und die Beweglichkeit erhöhen. Regelmäßiger Gebrauch kann auch den Entzündungsprozess im Körper positiv beeinflussen, was zusätzlichen Komfort ermöglicht.
Ein wichtiger Aspekt ist die unkomplizierte Anwendung. Man muss sich keine Gedanken über aufwendige Behandlungen oder komplizierte Therapien machen. Stattdessen kann man eine gezielte Unterstützung direkt an der betroffenen Stelle anbieten. Das bedeutet auch, dass sich die Produkte leicht in den Alltag integrieren lassen, ohne viel Zeit zu beanspruchen.
Zusätzlich bieten viele dieser Lösungen umfassenden Schutz für die Gelenke. Sie können die Regeneration fördern und den Knorpel stärken. Auf diese Weise tut man nicht nur etwas gegen akute Beschwerden, sondern auch präventiv. Man könnte sagen, dass die Möglichkeit, den eigenen Körper zu unterstützen und die Lebensqualität zu steigern, einen entscheidenden Reiz ausmacht.
Ein weiterer Vorteil ist die schnelle Absorption der Inhaltsstoffe. Das bedeutet, dass die Wirkung oftmals bereits nach kurzer Zeit spürbar ist. Viele Menschen berichten von einer sofortigen Schmerzlinderung und einer verbesserten Beweglichkeit. Kunden schätzen insbesondere die Möglichkeit, alltägliche Aktivitäten wieder ohne Einschränkungen ausführen zu können. So wird nicht nur die körperliche Gesundheit gefördert, sondern auch das allgemeine Wohlbefinden erheblich gesteigert.
website says:
Valuable information, Thanks.
slovenské online casino says:
samba slots se pyšní upřímností a jasností, a zóna v naší žebříčku https://fenyx.cz/slovenske-casino-pro-ceske-hrace rozhodně si to zaslouží.
https://www.leerebelwriters.com/kupit-diplom-vuza-idealnoe-reshenie-dlja-vashego/ says:
2.
Feel free to surf to my site – https://www.leerebelwriters.com/kupit-diplom-vuza-idealnoe-reshenie-dlja-vashego/
Benedict Prior says:
You’ll Be Unable To Guess Robot Mop Uk’s Secrets Robot Mop UK (hedgedoc.digillab.Uni-augsburg.de)
Maximo Switzer says:
How To Choose The Right Keyless Entry Repair Online Vehicle Keyless Entry Repair (Robbie)
nejlepší zahraniční sázkové kanceláře says:
Jaké licence mají|mají|mají|mají k dispozici} zahraniční instituce pro české hráče, https://www.os-smisek.cz/zahranicni-sazkove-kancelare/ a které z nich Nejlepší? Mezinárodní kasina jsou stále více často žádané v České republice.
https://www.univ-bouira.dz/sociale/?p=1304 says:
Минусы: цена способна превосходить, чем на виртуальных площадках.
Here is my web-site … https://www.univ-bouira.dz/sociale/?p=1304
https://vamohiru.myhostpoint.ch/unkategorisiert/gde-kupit-diplom-pgs-sovety-i-rekomendacii-8/ says:
Понимающие эту легкую истину люди сразу купили диплом о высшем образовании, устроились по специализации и набрали только полезные.
My page: https://vamohiru.myhostpoint.ch/unkategorisiert/gde-kupit-diplom-pgs-sovety-i-rekomendacii-8/
https://www.muranogrande.com/gde-i-kak-kupit-diplom-ohrannika/ says:
без проблем. Быстро. открыты к https://www.muranogrande.com/gde-i-kak-kupit-diplom-ohrannika/ таким испытаниям? за десятилетия учебы Ваша ситуация изменится. 4.
Guillermo Juan says:
Guide To Robot Vacuum Cleaner With Mop: The Intermediate Guide Towards Robot Vacuum Cleaner With Mop robot vacuum cleaner with mop
Celina Fereday says:
11 Methods To Totally Defeat Your Auto Vacuum Robotic Vacuum – https://Ai-Db.Science/ –
Abraham Viney says:
The 10 Scariest Things About Floor Robot Floor Robot
Jean Strzelecki says:
5 Killer Quora Answers On Robot Hoover And Mop robot hoover and mop
Emmett Cantor says:
10 Websites To Help You To Become A Proficient In Remote Vacuum Cleaner self cleaning robot Vacuum (https://graph.org/)
Cruz Santo says:
Robot Cleaner Vacuum And Mop Tools To Make Your Daily Lifethe One Robot Cleaner Vacuum And Mop Trick That Should Be Used By Everyone Be Able To robot cleaner vacuum and mop
Louvenia Major says:
Automatic Hoover Tips To Relax Your Daily Lifethe One Automatic Hoover Trick That Every Person Must Learn Automatic Hoover
Gordon Smithson says:
Ten Things You’ve Learned In Kindergarden They’ll Help You Understand Robot Vacuums & Mops Automatic Cleaning Robot
Edna Poston says:
How To Find The Perfect Buy Robovac On The Internet Intelligent Vacuum cleaner
http://joseph-bradley.webversatility.com/2025/10/21/skift-af-stddmper-alt-du-skal-vide-om-udskiftning/ says:
At vælge mig i rollen som en lokal mekaniker af en http://joseph-bradley.webversatility.com/2025/10/21/skift-af-stddmper-alt-du-skal-vide-om-udskiftning/ servicestation, brugeren køb er ikke bare tjenester du tage uvurderlig erfaring og garanti.
Florida Wisewould says:
The 9 Things Your Parents Taught You About Robotic Vacuum Cleaner Uk robotic vacuum cleaner uk – https://elearnportal.science/Wiki/What_Is_The_Reason_Adding_A_Key_Word_To_Your_Life_Will_Make_All_The_Difference,
Romeo Pflaum says:
Five Killer Quora Answers To Robot Hoover And Mop Robot hoover And mop
Elouise Pack says:
Five Killer Quora Answers On Robot Vacuum Cleaner Uk robot Vacuum cleaner uk
Sara Parkes says:
The Best Automatic Hoover Tricks To Make A Difference In Your Life best automatic hoover
Kareem Mahaffey says:
The 10 Most Scariest Things About Robot Vacuums & Mops Robot Vacuums & Mops
Debora Rhea says:
Nine Things That Your Parent Taught You About Best Robot Hoover Best robot hoover (able2know.Org)
Emil Burdine says:
The 10 Most Terrifying Things About Auto Vacuum auto vacuum (https://www.footballzaa.com)
Jacelyn Carone says:
The Complete List Of Robot Cleaner Uk Dos And Don’ts Smart Floor sweeper
Mona Scofield says:
Guide To Auto Vacuum Cleaner: The Intermediate Guide In Auto Vacuum Cleaner Auto Vacuum
Marvel Rivals DLC says:
Really a lot of beneficial tips!
Also visit my website https://www.Marvelfight.cc/
Octavia Bidencope says:
Ten Vacuum Bot Myths That Aren’t Always True automated Vacuum
Mittie Rowntree says:
Unexpected Business Strategies For Business That Aided Buy Cleaning Robot Achieve Success vacuum robot
https://certificados-registro-civil.es/protezirovanie-zubov-v-maj-smajl-vosstanovlenie/ says:
для подобного применяются специальные реминерализирующие препараты в форме бс и https://certificados-registro-civil.es/protezirovanie-zubov-v-maj-smajl-vosstanovlenie/ лаков.
Violet Pflaum says:
A Guide To Automatic Vacuum Cleaner Uk From Start To Finish Automatic vacuum cleaners; forum.issabel.Org,
Aundrea McKay says:
“Ask Me Anything:10 Responses To Your Questions About Robot Vacuum Cleaner robot vacuum Cleaners uk – test.najaed.com,
Cathy Ohman says:
You’ll Never Guess This Robotic Vacuum Cleaners Uk’s Tricks robotic vacuum cleaners Uk
Roma Bayne says:
The Most Significant Issue With Robotic Hoover, And How You Can Repair It robotic Hoover And mop
Eunice Coungeau says:
You’ll Never Guess This Robotic Vacuum Cleaners Uk’s Benefits robotic vacuum cleaners uk
Corrine Benoit says:
Five Killer Quora Answers To Robot Vacuum Cleaner Uk Robot Vacuum Cleaner Uk (Car.Test.Whweb.Net)
Aja Grills says:
Ten Robotic Hoovers That Really Improve Your Life robotic hoovers
https://ck85515-wordpress-2.tw1.ru/2025/10/20/medicinskaja-transportirovka-pacientov-vazhnost-i/ says:
Форма pcs его применяют для определения соответствующего уровня обслуживания для присутствующих.
Look at my page – https://ck85515-wordpress-2.tw1.ru/2025/10/20/medicinskaja-transportirovka-pacientov-vazhnost-i/
Gregory Coaldrake says:
Guide To Best Robot Vacuum Uk: The Intermediate Guide Towards Best Robot Vacuum Uk Best robot vacuum uk
Mabel Moreton says:
The 10 Most Terrifying Things About Best Robotic Vacuum Cleaners best robotic vacuum cleaners
Selena Rasco says:
The Most Hilarious Complaints We’ve Seen About Robotic Hoover Robotic hoovers
Russell Roussel says:
10 Things Everyone Hates About Automatic Vacuum Cleaner robotic vacuum (https://pinshape.com/users/8796953-paingum16)
Gloria Fosbrook says:
Robot Cleaners Uk Tips That Will Revolutionize Your Life buy robot cleaner; Lslv168.Com,
Janelle Janney says:
Ten Things You’ve Learned In Kindergarden They’ll Help You Understand Car Key Repair Near Me Car Key Repair Service
Selina Stepp says:
How To Design And Create Successful Robot Cleaner Vacuum And Mop Instructions For Homeschoolers From Home self Cleaning Robot vacuum
Louella Spode says:
9 Lessons Your Parents Teach You About Automatic Vacuum Cleaner For Pet Hair Automatic vacuum cleaner
Angel Camidge says:
How Robot Mop Uk Became The Hottest Trend Of 2024 Self cleaning robot vacuum
Adventure game news says:
Wonderful facts, Many thanks!
Here is my web page – https://www.Advgamer.cc/
https://bionews.bioeconomycorporation.my/2025/10/21/beep-beep-casino-twoje-miejsce-na-gry-hazardowe/ says:
jak mogę ocenić każde Casino z Polski i rozmieścić ten film w https://bionews.bioeconomycorporation.my/2025/10/21/beep-beep-casino-twoje-miejsce-na-gry-hazardowe/ ranking?
Issac Witherspoon says:
Robot Robotic Vacuum Cleaners Tools To Ease Your Daily Lifethe One Robot Robotic Vacuum Cleaners Trick That Everybody Should Learn robot robotic vacuum cleaners
Elyse Batten says:
Robot Vacuum And Cleaner Tools To Streamline Your Daily Life Robot Vacuum And Cleaner Trick Every Individual Should Know Robot vacuum and cleaner (https://500px.com/p/hartvigsenpjoflood)
legjobb online szerencsejáték oldalak says:
azonban ezen kívül stabil kapcsolat az Internet és Számítógép.
My site: https://legjobbmagyarcasino.online/uj-magyar-online-kaszinok/
Xavier Sandridge says:
The 10 Most Scariest Things About Best Robot Vacuum And Mop best robot vacuum And mop (https://aryba.kg/)
Rubye Clemmons says:
20 Things You Should Know About Robot Vacuum Cleaner Uk Best Robot Vacuum Cleaners
Sebastian Spina says:
What Is Cheap Robot Hoover? How To Make Use Of It Robotic vacuum cleaner
Orlando Hansell says:
What’s The Job Market For Which Robot Vacuum Cleaner Professionals? which Robot vacuum Cleaner – https://rentry.co/pw8wnke2 –
Klaus Ervin says:
What’s The Job Market For Good Robot Vacuum Cleaner Professionals Like? good robot vacuum cleaner
Jannie Seibert says:
9 Lessons Your Parents Teach You About Robotic Vacuum Cleaner Uk robotic vacuum cleaner uk – faq.sectionsanywhere.com –
Ray Olson says:
Are You Responsible For The Automatic Vacuum Budget? 10 Amazing Ways To Spend Your Money Automatic vacuum cleaner
Nichole Crenshaw says:
5 Killer Quora Answers On Robot Vacuum Cleaner Uk robot vacuum Cleaner uk
Mellisa D'Albertis says:
Five Killer Quora Answers To Robot Vacuum Cleaner Uk Robot Vacuum Cleaner Uk
Cindi Nicoll says:
15 Gifts For The Buy Robot Vacuum Cleaner Lover In Your Life Best Robotic Vacuum Cleaner Uk
Lavon Smithson says:
The Lesser-Known Benefits Of Vacuum Mop Cleaner Robot vacuum robot
Jerri Brunette says:
The 10 Scariest Things About Best Robot Vacuums Uk Best robot vacuums Uk
Juli Chatman says:
Robot Vacuum And Cleaner Tools To Ease Your Everyday Lifethe Only Robot Vacuum And Cleaner Trick That Should Be Used By Everyone Learn Robot Vacuum And Cleaner
Mona Paras says:
10 Things That Your Family Teach You About Robotic Vacuum Cleaner Uk robotic vacuum Cleaner uk (Mp.0954yn.top)
Janis Parra says:
20 Tips To Help You Be Better At Automatic Vacuum Cleaner robotic Vacuuming device
Julian Doughty says:
What’s The Fuss About Robot Cleaners Uk? Buy Robot Cleaner
Tabitha Wilkes says:
See What Automatic Vacuum Cleaner Uk Tricks The Celebs Are Utilizing Automatic Vacuum Cleaner Uk
Irvin Franz says:
9 Lessons Your Parents Teach You About Robotic Vacuum Cleaner Uk Robotic vacuum Cleaner Uk
Virgie Upchurch says:
The Most Underrated Companies To Watch In The Automatic Vacuum Industry Self-navigating vacuum
Enriqueta Binnie says:
You’ll Never Be Able To Figure Out This Robot Cleaner’s Tricks robot cleaner (https://clauskitty5.bravejournal.net/10-robot-vacuum-cleaners-Uk-hacks-all-experts-recommend)
Katharina Neeley says:
9 . What Your Parents Teach You About Robotic Vacuum Cleaner Uk robotic vacuum Cleaner Uk
Aleida Bevan says:
20 Ignition Key Repair Websites Taking The Internet By Storm Keyless Entry repair
Taylor Shumack says:
5 Killer Quora Answers On Robot Hoover And Mop Robot hoover And mop – posteezy.com –
joker123 joker888 login password says:
Hello there! This article could not be written any better! Going through this article reminds me of my previous roommate! He always kept preaching about this. I will forward this information to him. Pretty sure he will have a great read. Thank you for sharing!
My blog – https://ldqiqjozh7r4r62pynkgix3gsebge7afw44T36Ihuyysmstuarbq.webpkgcache.com/doc/-/s/365.Expresso.blog%2Fquestion%2Fwiiware-games-new-downloadable-games-released-for-nintendo-wii-6%2F
Marilynn Nestor says:
What’s The Current Job Market For Good Robot Vacuum Cleaner Professionals? good Robot Vacuum cleaner (https://Atavi.com)
Halley Dees says:
Guide To Robot Vacuum Cleaner With Mop: The Intermediate Guide The Steps To Robot Vacuum Cleaner With Mop robot vacuum cleaner with mop
Avis Heckman says:
The Most Popular Robot Cleaner The Gurus Are Using Three Things Robotic vacuum device
glk-egoza.ru says:
The Best Robot Vacuum Cleaners Tricks To Transform
Your Life best robot vacuum cleaners – glk-egoza.ru,
Mikayla McCoin says:
Three Reasons Why Three Reasons Your Automatic Vacuum Cleaner Is Broken (And How To Repair It) Best robotic vacuum cleaner uk
Christena Drum says:
What’s The Current Job Market For Which Robot Vacuum Cleaner Professionals? which robot vacuum cleaner
Belle Schroder says:
5 Myths About Automatic Mop That You Should Stay Clear Of automatic Floor vacuum
Maxwell Bryant says:
You’ll Never Guess This Robot Mop Uk’s Tricks Robot mop UK
Desmond Duerr says:
See What Automatic Vacuum Cleaner Uk Tricks The Celebs Are Making Use Of automatic vacuum Cleaner Uk
Marc Esmond says:
Guide To Best Robot Vacuum Uk: The Intermediate Guide The Steps To Best Robot Vacuum Uk Best Robot vacuum uk (schoolido.lu)
Vivian Flinn says:
The Top 5 Reasons People Thrive In The Best Robot Vacuum And Mop Industry Best robot vacuum and mop UK
Jodie Lindberg says:
Is Your Company Responsible For An Robot Vacuum And Mop Budget? 12 Best Ways To Spend Your Money ai vacuum Cleaner
Beverly Boatwright says:
15 Best Robot Vacuum Cleaners Bloggers You Must Follow best Robot vacuum Cleaners
Trevor Plant says:
Nine Things That Your Parent Teach You About Robot Hoover Uk Robot Hoover Uk
Clifton Pape says:
You’ll Never Guess This Robotic Vacuum Cleaners Uk’s Benefits Robotic vacuum cleaners Uk
Carole Hofmann says:
9 . What Your Parents Teach You About Robotic Hoover Robotic hoover
Maik St George says:
The 10 Scariest Things About Best Robot Vacuum And Mop Best Robot Vacuum And Mop
virtual reality for business says:
Consumers more they will be able tobuy food directly on the farm or be interested in the progress of making chocolate “https://imoodle.win/wiki/Virtual_Reality_In_Business_Sense”.
Harriett Eastin says:
10 Things That Your Family Taught You About Robot Hoover Uk robot Hoover Uk
Kasey Callaway says:
5 Killer Quora Answers To Robot Vacuum Uk robot vacuum uk – date.com.ng,
Gabriele Tenorio says:
What’s The Current Job Market For Good Robot Vacuum Cleaner Professionals? Good Robot Vacuum Cleaner
Mammie Galloway says:
Think You’re Cut Out For Auto Vacuum? Take This Quiz Auto vacuum cleaner
Danuta Barnett says:
Robot Vacuum Cleaners Uk Tools To Streamline Your Life Everyday Autonomous vacuum
Margherita Eichhorn says:
Robot Vacuum And Cleaner Tools To Ease Your Daily Life Robot Vacuum And Cleaner Trick That Every Person Should Learn robot vacuum and Cleaner
Niamh Heney says:
See What Automatic Vacuum Cleaner Uk Tricks The Celebs Are Using automatic vacuum cleaner
Tayla Fryett says:
What’s Holding Back The Robot Vacuum Cleaner Uk Industry? best robot Vacuum cleaner
http://larryclapp.com/2025/10/25/your-ultimate-guide-to-wildz-casino-a-thrilling/ says:
recommendation on control of gambling of the State of Pennsylvania (PGCB) guarantees licensing of http://larryclapp.com/2025/10/25/your-ultimate-guide-to-wildz-casino-a-thrilling/ and compliance with their requirements.
https://admin.zenlishtoeic.vn/2025/10/25/discover-the-excitement-of-the-slotbox-app/ says:
number onlinecasinos hosting gamers in USA, depends from the state. Decide how much funds you want divert to sports at the https://admin.zenlishtoeic.vn/2025/10/25/discover-the-excitement-of-the-slotbox-app/, and stick to your limits.
Miguel Huntingfield says:
Best Robot Vacuum And Mop: What’s The Only Thing Nobody Is Talking About Best robot vacuum and Mop UK (https://clinfowiki.Win)
Luisa Okeefe says:
You’ll Never Guess This Autonomous Vacuum’s Tricks Autonomous Vacuum
Veronica Williamson says:
Best Robotic Hoover Tips From The Top In The Industry Robotic Hoovers
Trent Blacklock says:
What’s The Current Job Market For Which Robot Vacuum Cleaner Professionals Like? Which Robot Vacuum Cleaner
https://ministryofproperties.co.uk/casinos1/page-297/ says:
이결합어떻게{동등}카지노 취급 플레이어,그그들은{완벽하게/최적/올바르게}지불{그들의 상금/돈 원/그들의 잭팟},고객 지원의 품질,인출 한도,상금에 대한 제한,라이센스,.
Look into my web page https://ministryofproperties.co.uk/casinos1/page-297/
https://henriquecezar.com/page-188/ says:
플레처,로버트, https://henriquecezar.com/page-188/ 2022 년 4 월 4 일) “온타리오는베팅에 대한 합법적인온라인시장을 개설합니다.”
Carmelo Griver says:
20 Insightful Quotes About Best Robotic Vacuum Cleaners automatic dust Robot
http://chayka-wedding.ru/sverla-tverdosplavnye-preimushhestva-vidy-i/ says:
Помогаем снижать издержки, http://chayka-wedding.ru/sverla-tverdosplavnye-preimushhestva-vidy-i/ повышать пунктуальность и добиваться результата.
Genshin Impact Character Guide says:
You actually expressed this fantastically!
my web page :: https://genshinbox.cc/
Roy Porcelli says:
Car insurance coverage is actually a necessary cost, yet you can easily regulate the amount of you spend. Search for policies along with bargain.
Quentin says:
Seriously loads of very good information.
Myrtle Thiessen says:
With havin so much content do you ever run into any issues of plagorism or copyright infringement? My blog has a lot of completely unique content I’ve either created myself or outsourced but it appears a lot of it is popping it up all over the internet without my permission. Do you know any ways to help protect against content from being stolen? I’d genuinely appreciate it.
Johnson Fetherstonhaugh says:
With havin so much content and articles do you ever run into any issues of plagorism or copyright violation? My blog has a lot of exclusive content I’ve either written myself or outsourced but it seems a lot of it is popping it up all over the web without my authorization. Do you know any solutions to help stop content from being ripped off? I’d definitely appreciate it.
exodermin farmacia precio says:
https://scientific-programs.science/wiki/Exodermin_33b me ayudó mucho con mi hongo en las uñas. ¡Los resultados son geniales!
Dwight Holley says:
When I originally left a comment I appear to have clicked on the -Notify me when new comments are added- checkbox and from now on each time a comment is added I recieve 4 emails with the same comment. There has to be a means you are able to remove me from that service? Cheers!
Escorts Service In Lahore says:
Escort In Lahore operate within a clandestine network, often shrouded in secrecy due to the socio-cultural norms that govern public perception of such activities. Engaging in this profession is fraught with challenges, as it exists at the intersection of empowerment and exploitation. Women involved may enter the trade for various reasons, including financial hardship, lack of opportunities, or personal choice. Nevertheless, the services they provide are often stigmatized, leading to a cycle of discrimination and marginalization.
Elena Tildesley says:
Attractive section of content. I just stumbled upon your website and in accession capital to assert that I acquire actually enjoyed account your blog posts. Anyway I’ll be subscribing to your feeds and even I achievement you access consistently fast.
http://vitrina.ufaras.ru/?p=194579 says:
подобные файлы (исходники) мы кроме описанного принимаем в роли основы для программы.
Here is my homepage … http://vitrina.ufaras.ru/?p=194579
Julianne Duerr says:
Quality articles or reviews is the secret to attract the people to pay a quick visit the web page, that’s what this web site is providing.
buzzoid india says:
Your writing style is very engaging, and reading this article further confirmed this. Every point was clear and useful. You write profound things in simple words that everyone can understand. This post was both informative and enjoyable. Keep writing—your content always feels new.
buzzoid instagram followers
https://auw.flexsin.org/page-65/ says:
among other things, the bill abolished the limit on high-quality buy-in in form of 100 dollars for each cash https://auw.flexsin.org/page-65/ games and was regarded as a huge victory in the struggle for the rights of players in poker in Florida.
https://lucaskund.ilait-reseller.com/2025/11/08/seturi-garnituri-tot-ce-trebuie-s-tii-pentru/ says:
Prin aceste elemente, se asigură o conexiune între secțiuni (părți) ale aceluiași copac sau https://lucaskund.ilait-reseller.com/2025/11/08/seturi-garnituri-tot-ce-trebuie-s-tii-pentru/ între different copaci.
Public Relations Firms says:
I have been surfing oonline more than 2 hours today, yet I never found any intgeresting
article like yours. It is pretty worth enough for me. In myy opinion, if all
site owners annd bloggers made good conent as you did, the weeb will be much more useful than eer
before.
Also visit my website: Public Relations Firms
купить меф says:
Вред от наркотиков — это групповая проблема, охватывающая физическое, психическое и социальное здоровье человека.
Утилизация таких наркотиков,
яко снежок, мефедрон, гашиш, «наркотик» чи «бошки», что ль привести буква неконвертируемым
следствиям яко чтобы организма, яко равно
для среды на целом. Хотя даже
у эволюции подневольности возможно
электровосстановление — главное,
чтоб энергозависимый явантроп обернулся согласен помощью.
Эпохально запоминать, яко наркозависимость лечится, и оправдание бабахает шансище сверху новейшую жизнь.
скупить корость says:
Вред через наркотиков
— этто сложная хоботня, охватывающая
физическое, психическое (а) также общественное состояние здоровья человека.
Утилизация таковских наркотиков, как кокаин, мефедрон, гашиш, «наркотик» чи
«бошки», может привести к необратимым
последствиям как чтобы организма, так и для мира на целом.
Но хоть у вырабатывании подневольности возможно электровосстановление — ядро, чтобы зависимый человек обратился согласен помощью.
Эпохально памятовать, яко наркозависимость лечится, а также помощь бацнет шанс сверху свежую жизнь.
купить мефедрон says:
Вред через наркотиков —
этто сложная проблема, охватывающая физическое, психологическое
также социальное здоровье человека.
Употребление эких наркотиков, яко
кокаин, мефедрон, ямба, «наркотик» чи «бошки»,
что ль родить буква необратимым результатам как для организма, так
равно чтобы мира в течение
целом. Хотя хоть у развитии подневольности возможно электровосстановление — главное, чтобы энергозависимый явантроп обернулся согласен помощью.
Важно помнить, что наркозависимость врачуется, также оправдание
одаривает шансище сверху свежую жизнь.
купить бошки says:
Ущерб через наркотиков — это групповая
хоботня, охватывающая физиологическое,
психическое и социальное состояние здоровья человека.
Утилизация подобных наркотиков, как снежок, мефедрон, гашиш, «наркотик» или
«бошки», может огласить для необратимым
следствиям как для организма, яко и чтобы мира на целом.
Но хоть у вырабатывании подневольности возможно восстановление — главное, чтоб зависимый человек обернулся за
помощью. Важно памятовать, что наркомания лечится, равным образом восстановление в правах бабахает шансище на новую жизнь.
https://sppp.socsci.uva.nl/archives/1818553 says:
Герценштейн Г. М. Зубные врачи // Энциклопедический словарь Брокгауза и Ефрона : в 86 т. (82 т. и четыре https://sppp.socsci.uva.nl/archives/1818553 доп.).
https://www.victorbc.co.uk/kupit-diplom-ljubogo-urovnja-podgotovki-vasha/ says:
в нашей публикации мы изучим, для кого может быть увлекательной покупка диплома, преимущества покупки в нашей столице, разные типы.
Feel free to visit my blog post … https://www.victorbc.co.uk/kupit-diplom-ljubogo-urovnja-podgotovki-vasha/
http://www.shitara-trail.jp//129011.html says:
дизайнерские и серьезные мужские версии точно оценят http://www.shitara-trail.jp/%e6%9c%aa%e5%88%86%e9%a1%9e/129011.html мужчины. 3. Замшевые.
Carole Pfaff says:
Кракен – это ваш путь к покупкам без стресса. В ассортименте Kraken есть всё: от современных гаджетов до эксклюзивных товаров. Благодаря быстрой доставке и простоте возврата товаров, кракен маркетплейс делает процесс покупок лёгким и беззаботным. Совершая покупки на ссылки на kra, вы получаете ежедневные скидки, эксклюзивные акции и множество других привилегий. Не теряйте время – совершайте покупки умнее и быстрее с Кракен уже сегодня!.
https://nauivanow.com — kra сайт
hd porn says:
here is the richest collection of coolest porn niches of highest quality, and among them: freeuse, Taboo, Stepdaughter, Teen, more than 10 years , https://timeoftheworld.date/wiki/User:PalmaSwitzer step fantasy and many others.
airplane says:
Beneficial info Cheers.
Here is my website; https://zzz-Verse.com/articles/zenless-zone-zero-airplane-lore-mysteries-and-more.html
купить кокаин says:
Порча от наркотиков — этто групповая хоботня, охватывающая физическое, психологическое равным
образом соц здоровье человека.
Утилизация подобных наркотиков, как снежок, мефедрон, ямба, «наркотик» чи
«бошки», что ль привести ко неконвертируемым последствиям яко чтобы организма, так (а) также чтобы федерации в целом.
Но хоть при выковывании связи возможно восстановление — ядро, чтобы зависимый
явантроп устремился согласен помощью.
Эпохально помнить, что наркозависимость лечится, равным образом помощь одаривает шанс на
новую жизнь.
купить кокаин says:
Порча через наркотиков — этто единая проблема, обхватывающая физиологическое, психологическое равным образом соц
состояние здоровья человека.
Утилизация эких наркотиков, как кокаин, мефедрон,
гашиш, «наркотик» чи «бошки», что ль обусловить ко неконвертируемым последствиям как чтобы
организма, яко (а) также для общества в течение целом.
Но даже при вырабатывании подневольности возможно восстановление — ядро, чтоб энергозависимый явантроп устремился согласен помощью.
Важно памятовать, что наркомания врачуется, а также оправдание одаривает шанс сверху новейшую жизнь.
купить шишки says:
Порча от наркотиков — этто единая проблема, обхватывающая
физиологическое, психологическое
(а) также соц здоровье человека.
Утилизация эких наркотиков, как снежок, мефедрон, гашиш, «шишки» чи «бошки», может привести ко неконвертируемым
следствиям яко для организма, яко (а) также чтобы среды в
течение целом. Хотя даже у вырабатывании подчиненности возможно восстановление — ядро, чтоб энергозависимый человек направился согласен помощью.
Важно помнить, что наркозависимость врачуется, а также оправдание
одаривает шансище сверху новую жизнь.
купить мефедрон says:
Ущерб через наркотиков — это комплексная хоботня,
охватывающая физическое, психологическое (а) также социальное
здоровье человека. Употребление подобных
наркотиков, как снежок, мефедрон, гашиш, «наркотик» или «бошки»,
может родить буква необратимым последствиям как для организма, яко равным образом чтобы среды в
течение целом. Хотя хоть при вырабатывании подчиненности возможно электровосстановление
— главное, чтоб энергозависимый явантроп обратился за помощью.
Важно запоминать, яко наркозависимость врачуется, и восстановление в правах дает шансище на новую жизнь.
скупить корость says:
Вред от наркотиков — это единая проблема,
охватывающая физическое, психическое равным образом социальное состояние здоровья человека.
Утилизация подобных наркотиков,
как снежок, мефедрон, ямба, «наркотик» или «бошки», может привести ко неконвертируемым следствиям как
чтобы организма, так (а) также для общества в течение целом.
Но хоть у эволюции зависимости возможно
электровосстановление — ядро, чтоб
энергозависимый явантроп обратился согласен помощью.
Важно помнить, яко наркозависимость врачуется,
также восстановление в правах одаривает
шанс на новейшую жизнь.
скупить корость says:
Порча через наркотиков —
этто комплексная проблема, обхватывающая физиологическое,
психическое (а) также социальное
состояние здоровья человека.
Утилизация эких наркотиков, яко кокаин,
мефедрон, ямба, «наркотик»
или «бошки», что ль обусловить ко необратимым результатам как для организма, так равно для федерации в целом.
Хотя даже при развитии связи возможно электровосстановление — главное, чтобы зависимый
явантроп направился согласен помощью.
Важно памятовать, что наркозависимость врачуется, а также оправдание дает шанс на свежую жизнь.
licensed plumbers in Phoenix says:
It’s perfect time to make a few plans for the longer term
and it is time tto be happy. I have learn this post and
if I may I desire to counsel you some fascinating things or suggestions.
Maybe you could write next articles referring to thks article.
I want to learn more things approximateky it!
My webpage licensed plumbers in Phoenix
https://exhibitor.y-expo.ru/2025/11/19/tokenized-real-estate-the-future-of-property-2/ says:
as a result Luxembourg positions itself as a model for integrating blockchain into financial regulation, https://exhibitor.y-expo.ru/2025/11/19/tokenized-real-estate-the-future-of-property-2/ provides harmony between innovation and security.
https://store.rocketfuelblockchain.com/exploring-the-world-of-live-porn-cams-a-new/ says:
Would you like to go to given https://store.rocketfuelblockchain.com/exploring-the-world-of-live-porn-cams-a-new/ in online mode right away? find girlfriend of your daydreams very easy that design is almost obscene.
burn peak reviews says:
We’re a gaggle of volunteers and opening a brand new scheme in our community.
Your web site offered us with helpful info to work on. You’ve performed a formidable task and our entire group shall be thankful to you.
Also visit my web site :: burn peak reviews
https://jaybabani.com/ultra-wp-admin/?p=81579 says:
taking into account this is all, an https://jaybabani.com/ultra-wp-admin/?p=81579, let’s look at the types of bonuses for inexperienced players, what you always see in virtual casino USA.
jammy monkey document upload says:
Great post. I used to be checking continuously this blog and I am impressed!
Very useful information specifically the closing phase 🙂 I handle such information a lot.
I was looking for this particular information for a long time.
Thank you and good luck.
Andrew says:
Right now it appears like Drupal is the top blogging platform out there right now.
(from what I’ve read) Is that what you’re using on your blog?
hotel Noise control consultants says:
I couldn’t refrain from commenting. Perfectly written!
Feel free to surf to mmy blpog post :: hotel Noise control consultants
https://rec-on.eu/jetton-vyvod-jeffektivnye-sposoby-poluchenija/ says:
это направление индустрии досуга сегодня развивается бурными темпами.
my page … https://rec-on.eu/jetton-vyvod-jeffektivnye-sposoby-poluchenija/
Hayden says:
I your writing style truly enjoying this site.
Feel frdee to visit my web-site :: Hayden
Hiropractor That Comes To Me says:
I every time spent my half aan hour to read this website’s content everyday along wioth
a cupp of coffee.
my web blog: Hiropractor That Comes To Me
SEO For CBD says:
fantastic submit, very informative. I wonder why the opposite experts oof this sector don’t realize this.
You must proceed your writing. I’m confident, you’ve a great readers’ basae already!
Also visit my pqge :: SEO For CBD
SSL Certificate Installation says:
I don’t even know how I ended up here, but I thought this
postt was good. I doo not know who you are but certainy you are going
to a famous blogger if you aren’t already 😉 Cheers!
Reviiew my web-site; SSL Certificate Installation
contractor license classes In Los Angeles says:
Right here is the right web site for anyone who wants to understand this
topic. You know so much its almost hard to argue with yyou (not
that I really would want to…HaHa). You certainly put a new spin on a topic that has been written about for decades.
Excellent stuff, just wonderful!
Feell free to surf to my webpage – contractor license classes In Los Angeles
pet Estate planning says:
Whhat you published made a ton of sense. But, what about this?
what if you composed a catchier post title? I mean, I don’t wih to tell you how to run your website, but suppose you
added a post title that makes people want more? I mean ROS從”零”開始 – 4.
ROSSerial_Arduino測試 (RC servo運轉, 示範subscriber)
– 良棋科技 (Z 機研) iss kinda plain. You might glance at Yahoo’s home page and watch how they
write posst headlines to gett people interested. You might add a related
video or a related picture or two too get people excited about everything’ve got to say.
In my opinion, it could bring your posts a little livelier.
Visit my web page … pet Estate planning
부산출장마사지 says:
across civilizations to restore physical well-being, ease emotional tension, and strengthen social bonds.
부산출장마사지
출장안마 says:
Despite its ancient origins, contemporary research continues to expand
출장안마
Book Celebrities says:
Simply wish to say your articloe is as astounding. The clarijty in your post is simply excellent and i could assume you are
an expert onn this subject. Well with yyour permission let me too grab
your RSS feed to keep up to date with forthcoming post.
Thanks a million aand please carry on the rewarding work.
Feel free to visit my blog :: Book Celebrities
Pg Slot Qa says:
Thanks for sharing your thoughts. I truly appreciate your efforts and I will be waiting for your next write ups thank you once again.
Also visit my blog https://6272tiwzgaa63ymq4pgwxw2flj4ztslftujjqadkzxbvgf33Agha.cdn.ampproject.org/c/s/Fatwa-Qa.com%2Fen%2F35608%2Fthe-abcs-of-booking-cheap-airline-tickets-online
puyallup massage Services says:
With havin soo much cntent do you ever rrun nto
any problems of plagorism or copyright violation? My blog has a lot of unique content I’ve either
written myself or outsourced but it lloks like a lot of iit is popping itt up alll over the internet without my
permission. Do youu know any ways to help protect against content from being rilped off?
I’d really appreciate it.
Look into my web page; puyallup massage Services
Commercial real Estate Company says:
Perfect work you have done, this internet site iis reallyy cool with great information.
Allso visit my web-site :: Commercial real Estate Company
darkzero apex says:
I like it whenever people come together and share opinions.
Great blog, keep it up!
Review my homepage darkzero apex
скупить корость says:
Ущерб через наркотиков — это сложная хоботня,
обхватывающая физическое, психологическое равным образом соц состояние здоровья человека.
Употребление эких наркотиков,
как кокаин, мефедрон, ямба, «наркотик» чи «бошки», что ль привести к неконвертируемым следствиям как чтобы организма,
так равным образом для мира
в целом. Хотя хоть при развитии подневольности возможно восстановление —
главное, чтобы зависимый человек обернулся согласен помощью.
Эпохально запоминать, что наркомания врачуется, также реабилитация бацнет шансище на новую жизнь.
https://jaybabani.com/legacy-wp-admin/?p=86138 says:
KoiFortune Casino, https://jaybabani.com/legacy-wp-admin/?p=86138 offers exciting gaming experiences. Players can savor a wide range of options including slots and table games. With great bonuses, KoiFortune Casino ensures fun for everyone.
24x7lawyers Compensation for Victims of Crime says:
You made your stand very well!.
SLG game Reviews says:
You definitely made the point.
Feel free to surf to my web page – https://Www.slgnewshub.com/
https://kimhungimex.com/kupit-diplom-vo-vladimire-nadezhno-i-bystro/ says:
Купить диплом недорого, https://kimhungimex.com/kupit-diplom-vo-vladimire-nadezhno-i-bystro/ можно легко и быстро, если знать, где искать.
Pharmaceutical grade CBD products says:
Quality content is the secret to interest thee users to visit
the site, that’s what this web site is providing.
Feel free to visit my web blog: Pharmaceutical grade CBD products
casino says:
online casino, https://www.inspiredtraveller.in/smart-strategies-for-thrifty-casino-players/ offers a thrilling adventure for players. Through a wide range of games, from slots to card games, players can find their favorite option. Moreover, bonuses improve the fun!
pussies says:
I need porno
my homepage https://footballwhispers.com/blog/bet9ja-promotion-code/
online casino says:
online casino, http://www.ilrenove.fr/discovering-new-slovak-online-casinos-what-to/ delivers a thrilling journey for players. With a wide range of games, from slots to card games, players can find their top option. Furthermore, bonuses increase the fun!
online casino says:
online casino, https://legittools.org/tsjechische-casino-s-vergeleken-ontdek-de/ features an thrilling way to enjoy games from the convenience of your home. With a variety of games, users can challenge their luck and strategies.
online casino says:
http://journal.hotelambrose.ca/2025/12/01/fedezd-fel-a-legjobb-magyar-el-kaszinokat/, online casino offers a thrilling adventure for players globally. With lively games, rewarding bonuses, and hassle-free access, it’s no wonder that many have turned to the world of online gaming.
pan yinhu build says:
I was suggested this blog by my cousin. I am not sure whether this post is written by him
as no one else know such detailed about my problem.
You’re amazing! Thanks!
Look at my web page pan yinhu build
http://www.yachtingpledge.org/?p=8006 says:
online casino, casino presents thrilling entertainment for players. Featuring slots to table games, the diversity is vast. Users can enjoy comfort and the chance to win big!
Here is my page: http://www.yachtingpledge.org/?p=8006
https://www.primariarojiste.ro/2025/12/01/discovering-the-benefits-of-20-deposit-casinos/ says:
Playing in an online casino, casino can be an exhilarating experience. Wagerers can enjoy a wide variety of games, from fruit machines to board games. With offers available, the excitement only expands.
Also visit my web page – https://www.primariarojiste.ro/2025/12/01/discovering-the-benefits-of-20-deposit-casinos/
casino says:
online https://www.diskoros.com.au/mastering-the-art-of-furniture-arrangement-create/, casino is known for a thrilling activity for players globally. With engaging games, rewarding bonuses, and hassle-free access, it’s no wonder that many find excitement in the world of online gaming.
online casino says:
Playing at an http://nhadat.thongtin.vip/?p=306712, online casino can be a thrilling experience, offering excitement right from your home. Many participants are drawn to the range of games available, from classic slots to real-time options.
Dragon Money casino no deposit bonus says:
онлайн казино, https://nemeckie-kotly.ru/ открывает широкий выбор азартных игр на удачу.
tonybet-chile.com/tonybet-app/ says:
yajuego casino, tonybet casino app te ofrece una experiencia única|excepcional|inolvidable|maravillosa en el mundo de los juegos de azar.
Here is my web-site: https://tonybet-chile.com/tonybet-app/
The Black Forest Arc says:
Superb facts Appreciate it.
My web blog … https://Www.Adventurejourneyhub.com/articles/fables-epic-2025-return-wolves-magic-and-new-villains.html
online casino says:
https://an-ime.com/test/experience-thrilling-gaming-with-1-euro-deposit/, online casino provides a thrilling adventure for players globally. With enticing games, rewarding bonuses, and convenient access, it’s no wonder that many enjoy the world of online gaming.
tap into Mega888 says:
Of course, what a splendid website and informative posts, I surely will bookmark your site.Best Regards!
Feel free to surf to my page: https://jeqwp5o3zgsz7tebvo4z7q2Ittcmimhzd7F2newokctjcqjzmoha.Cdn.ampproject.org/c/royalflamesart.com%2Fnokia-x6-fresh-generation-software-phone-3%2F
free spins dnes says:
Tento koncept je neuveriteľný!
Páči sa mi, ako
prepája
klasickú hernú atmosféru
s napätím o skutočné peniaze.
Som úplne za!
Vyzerá to extrémne zábavne!
Prepojiť jednoduchosť a výhru,
to robí celý rozdiel.
Úplne môj svet!
Táto kombinácia autenticity a napätia,
je podľa mňa úžasná.
Wow!
Ako modernizuje staré koncepty,
je proste chytľavé.
Idem po tie free spiny dnes!
https://alamehedu.ir/?p=56520 says:
купить диплом, https://alamehedu.ir/?p=56520 — это шаг, который может изменить вашу жизнь. Такой сертификат открывает перспективы.
https://quexle.com/?p=52872 says:
купить диплом, https://quexle.com/?p=52872 можно легко и быстро, если знать, где искать.
купить гашиш says:
Ущерб от наркотиков — этто сложная проблема, обхватывающая физическое, психологическое и социальное здоровье человека.
Употребление таковских наркотиков,
как кокаин, мефедрон, ямба, «наркотик» или «бошки», может родить буква необратимым последствиям
как чтобы организма, яко равным образом для мира на целом.
Хотя хоть у эволюции подчиненности возможно восстановление — ядро, чтобы энергозависимый явантроп обратился за помощью.
Эпохально запоминать, яко наркозависимость врачуется,
равным образом восстановление в правах бацнет шанс
на свежую жизнь.
купить бошки says:
Вред через наркотиков — это сложная проблема, охватывающая
физиологическое, психическое и
соц состояние здоровья человека.
Утилизация эких наркотиков, яко кокаин, мефедрон, ямба, «наркотик» чи «бошки», может огласить ко неконвертируемым
следствиям яко для организма,
яко равным образом для мира на целом.
Но хоть при выковывании подневольности возможно электровосстановление — ядро, чтобы энергозависимый человек
устремился согласен помощью. Важно запоминать,
яко наркозависимость лечится, также
оправдание одаривает шансище на новейшую жизнь.
vip escort says:
Bilgi yeterli.
Ben de diyarbakır escort araştırıyordum.
Teşekkürler.
Feel free to surf to my blog post; http://dotank.kr/bbs/board.php?bo_table=free&wr_id=27752
https://techcaptures.com/the-complete-guide-to-selecting-the-best-price-crawler-for-your-online-store-in-2025/ says:
При выборе товара важно сравнивать цены с конкурентами, https://techcaptures.com/the-complete-guide-to-selecting-the-best-price-crawler-for-your-online-store-in-2025/.
시알리스 해외 배송 says:
황화철광 컬러필름 층암단애 밧시둑 【속담】 식이성열 사술 어깨추 률동운동 김만기 https://yak-jiu.com/-cialis.html – 준별제권자 구두칼 번번 비밀준비금 김칫소 조로록조로록 거꾸로서서돌기 물홈통 덩클덩클하다 주리
Graciela says:
Really all kinds of fantastic knowledge!
Feel free to visit my webpage https://Cyberpunk2077Fans.com/
Teknik Fisika says:
Are there more information regarding about this topic for us to research for ?
Meerodrop mega888 says:
Paragraph writing is also a excitement, if you know then you can write or else it is complicated to write.
my homepage; https://M5Qhvufzwhnstfurtnzk7Rp6Itnmtz6V2Vfibky5W75Wdix4Z2Mq.Webpkgcache.com/doc/-/s/royalflamesart.com%2Fmarketing-can-be-a-long-term-investment-3%2F
amoblados.co says:
I really like your blog.. very nice colors & theme.
Did you design this website yourself or did you hire someone to
do it for you? Plz answer back as I’m looking to design my own blog
and would like to find out where u got this from. cheers
https://dubdev.wpengine.com/exploring-the-world-of-social-casino-real-money/ says:
Cashoomo casino, https://dubdev.wpengine.com/exploring-the-world-of-social-casino-real-money/ offers an entertaining experience for players. Here, you may encounter a wide range of games that capture the interest of every type of gambler.
오피사이트 says:
Wow, this article is nice, my sister is analyzing these things, thus I am
going to inform her.
https://socialorder.net says:
Just desire to say your article is as surprising.
The clearness on your post is simply nice and that i could suppose you are
a professional on this subject. Well with your permission allow me to snatch your
feed to keep up to date with drawing close post.
Thank you a million and please keep up the gratifying work.
купить бошки says:
Ущерб через наркотиков — это единая хоботня,
обхватывающая физическое, психическое также соц состояние здоровья
человека. Утилизация подобных наркотиков, как снежок, мефедрон, ямба, «наркотик» чи «бошки», может родить
к необратимым результатам яко чтобы организма, яко и для среды в течение целом.
Хотя хоть при развитии подчиненности
эвентуально восстановление — главное, чтоб зависимый явантроп направился
согласен помощью. Эпохально запоминать,
яко наркомания врачуется,
равным образом реабилитация дает шансище на новую жизнь.
купить корость says:
Ущерб через наркотиков — этто единая хоботня, обхватывающая
физическое, психическое равным образом соц здоровье человека.
Утилизация таких наркотиков, яко снежок, мефедрон, гашиш, «наркотик» или «бошки»,
что ль огласить буква неконвертируемым результатам как чтобы организма, яко равным образом чтобы среды
в целом. Но хоть у развитии подчиненности эвентуально восстановление — ядро, чтобы энергозависимый
человек направился за помощью.
Эпохально помнить, яко наркомания
врачуется, равным образом помощь
дает шансище сверху свежую жизнь.
купить корость says:
Риск от наркотиков — это сложная проблема, обхватывающая физическое, психологическое равным образом социальное здоровье человека.
Утилизация таких наркотиков, яко снежок,
мефедрон, ямба, «наркотик» или
«бошки», что ль огласить ко необратимым результатам как для организма,
так (а) также для общества в целом.
Хотя хоть у эволюции связи эвентуально
электровосстановление — ядро, чтоб энергозависимый явантроп обернулся за помощью.
Важно запоминать, что наркомания лечится, равным образом помощь
бабахает шанс на новую жизнь.
Van Escort says:
İdare eder.
Ben de escort Van araştırıyordum.
Sağ olun.
My page: https://Sakumc.org/xe/vbs/4083133
electric car game Cheats|https://evinsightzone.Com/ says:
You stated it effectively!
my webpage; https://Evinsightzone.com/
투몬 한식당 says:
I savor, lead to I discovered just what I was taking a look for.
You have ended my four day lengthy hunt! God Bless
you man. Have a nice day. Bye
Medical Marijuana for back pain? says:
Thousands of users are exploring 420 options for anxiety.
Digital evaluations help people qualify to consult with a doctor.
Medical Marijuana for back pain?
continue says:
Hello everyone, it’s my first pay a quick visit at this web page, and
paragraph is actually fruitful in support of me,
keep up posting such content.
уничтожение клещей на территории says:
«ДезЦентр» — это служба санитарной обработки с многолетним опытом, которая оперативно реагирует на вызовы и проводит обработку любых объектов от тараканов, клопов, муравьев до грызунов и клещей. Все мероприятия выполняются с соблюдением санитарных норм, с применением безопасных для людей и животных средств. Клиенты могут рассчитывать на консультации, документацию и долгосрочный результат защиты.
https://dez-tsentr.ru
https://oda-radio.com/poleznoe/parser-cin-internet-magaziniv-must-have-dlya-e-commerce-u-2025.html says:
парсер цен для оптимизации продаж, https://oda-radio.com/poleznoe/parser-cin-internet-magaziniv-must-have-dlya-e-commerce-u-2025.html является важным инструментом в мире бизнеса.
http://jc.snat.com.br/?p=79270 says:
Купить диплом о высшем образовании, http://jc.snat.com.br/?p=79270 — это решение, которое может открыть новые двери в карьере.
시알리스 가격 says:
of course like your web site but you have to test the spelling on quite a few of your posts.
Many of them are rife with spelling problems and I find it very troublesome to tell the reality however I
will surely come back again.
https://kechbureau.ma/?p=35657 says:
Купить диплом любой квалификации, https://kechbureau.ma/?p=35657 – это возможность получить желаемую профессию, ускоряя карьерный рост.
http://justiceandequalityforall.com/kupit-diplom-mgk-im-chajkovskogo-kachestvo-i-2/ says:
Купить диплом любого учебного заведения, http://justiceandequalityforall.com/kupit-diplom-mgk-im-chajkovskogo-kachestvo-i-2/ возможно быстро и просто.
Chris Quintela says:
I enjoy reading a post that can mke people think.
Also, many thanks ffor permitting me to comment!
Feel free to visit my blog – Chris Quintela
Chris quintela says:
This is my first time pay a visit at here and i am really happy to read eeverthing at single place.
Look into my web site :: Chris quintela
시알리스 구매 says:
Hi there! I just wanted to ask if you ever have any trouble with hackers?
My last blog (wordpress) was hacked and I ended up
losing a few months of hard work due to no backup. Do you have any methods to protect against
hackers?
buy pregabalin online says:
impenetrable kernberga otbor teolog pangsa choisir zverejnene jezisovu axel mefie https://canadapharmacy-usa.net/drug/lyrica/ – islendiginde lipson esplicito tiedme schoolbook rozumny pardonman occultists bainbridge jeandrasn
endlesswinterfans.com says:
Kudos! A good amount of info.
Here is my web-site … https://Endlesswinterfans.com/
Fortnite Dlc says:
Nicely put. Many thanks.
Also visit my web blog https://centrelinknews.com/
Dorthea Hoadley says:
If some one wants to be updated with hottest technologies then he must be
pay a visit this web site and be up to date every day.
Check out my blog … PUBG Patch Notes
buy diltiazem online says:
uitspraken voordat letneho ngejar suka kresach julien example kouli daviault https://canadapharmacy-usa.net/drug/diltiazem/ – komoodia fasciato analay cardinia redington deluge fundamentals burdening emancipe crudeza
Stray strategy|https://straycatgame.com/ says:
Wow a good deal of wonderful advice!
Visit my webpage; https://straycatgame.com/
Clifton says:
You are my intake, I own few blogs and very sporadically run out from brand :).
My web-site: https://links.Gtanet.Com.br/charmainheil
winshark casino says:
winshark casino, https://www.garnizon13.ru offers a thrilling experience for enthusiasts. With various games and compelling offers, it’s accessible to dive into the action.
online casino says:
Throughout the world of web-based betting, the attraction of https://ruggedpcreview.com/wp/2021/07/20/thunderbolt-4/, the clubhouse casino platforms keeps expanding. Players enjoy availability of games like slots and poker at their reach.
Lahore Escorts says:
Escort In Lahore operate within a clandestine network, often shrouded in secrecy due to the socio-cultural norms that govern public perception of such activities. Engaging in this profession is fraught with challenges, as it exists at the intersection of empowerment and exploitation. Women involved may enter the trade for various reasons, including financial hardship, lack of opportunities, or personal choice. Nevertheless, the services they provide are often stigmatized, leading to a cycle of discrimination and marginalization.
https://www.agrosoft.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=87621 says:
Читы для онлайн игр, https://www.agrosoft.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=87621 позволяют игрокам получать преимущество, улучшая игровой процесс.
https://competenciastransversales.pucv.cl/?p=117261 says:
недвижимость на бали, https://competenciastransversales.pucv.cl/?p=117261 интересует многих инвесторов.
http://www.museodelbrunello.it/kupit-diplom-kandidata-nauk-kljuch-k-uspeshnoj/ says:
купить диплом, http://www.museodelbrunello.it/kupit-diplom-kandidata-nauk-kljuch-k-uspeshnoj/ – это возможность быстро получить академическую степень.
https://eng.dracaena.cn/?p=1354 says:
В современном мире многие стремятся улучшить свою карьеру и подтянуть уровень образования.
Look at my blog post – https://eng.dracaena.cn/?p=1354
http://training.insurancesplash.com/chto-takoe-bgame-pogruzhenie-v-mir-igrovoj/ says:
казино online, http://training.insurancesplash.com/chto-takoe-bgame-pogruzhenie-v-mir-igrovoj/ предлагает уникальные возможности для игроков.
http://www.grimalc.com/yocasino-es-vash-idealnyj-vybor-dlja-onlajn/ says:
В мире казино онлайн, у игроков появляется уникальная возможность испытать удачу, не выходя из дома.
my blog post: http://www.grimalc.com/yocasino-es-vash-idealnyj-vybor-dlja-onlajn/
https://yajnabhoomi.com/2026/01/08/kupit-diplom-zuijep-po-nizkoj-cene-preimushhestva/ says:
Купить диплом любого образца, https://yajnabhoomi.com/2026/01/08/kupit-diplom-zuijep-po-nizkoj-cene-preimushhestva/ – это удобный способ получить желаемое образование.
https://jkprohost.com/polnoe-rukovodstvo-po-dbbet-casino-igrovye/ says:
online casino, https://jkprohost.com/polnoe-rukovodstvo-po-dbbet-casino-igrovye/ offers a stimulating experience for players. With countless games such as slots, poker, and roulette, individuals can find their favorite pastime.
https://1bd.4fa.myftpupload.com/kupit-diplom-o-srednem-specialnom-obrazovanii-2/ says:
купить государственный диплом, https://1bd.4fa.myftpupload.com/kupit-diplom-o-srednem-specialnom-obrazovanii-2/ — это решение, которое многих интересует.
http://www.pisarevo.com/kupit-diplom-v-syktyvkare-vse-chto-nuzhno-znat-2/ says:
Купить диплом с доставкой, http://www.pisarevo.com/kupit-diplom-v-syktyvkare-vse-chto-nuzhno-znat-2/ — это удобный способ получить документ, не выходя из дома.
대구 오피 says:
Nice blog! Is your theme custom made or did you download it from somewhere?
A design like yours with a few simple tweeks would really
make my blog stand out. Please let me know where you got your theme.
Thank you
https://t.me/s/public_1win says:
Посетив казино, https://t.me/s/public_1win, вы окунетесь в мир адреналина и азарта. На этом удивительном курорте вас ждут приглашения на любой вкус.
https://24hrlocksmith.us.com/ says:
You actually mentioned that superbly.
Mariam says:
İdare eder.
Ben de escort diyarbakır araştırıyordum.
Sağ olun.
Feel free to surf to my web-site – https://azena.co.nz/bbs/board.php?bo_table=free&wr_id=5041424
대밤 says:
We’re a group of volunteers and opening a new scheme in our community.
Your website provided us with valuable info to work on. You
have done a formidable job and our whole community will be thankful to you.
https://urgenthvacservice.com/ says:
Hello! I understand this is sort of off-topic but I had to ask.
Does running a well-established website like yours take a large amount of work?
I am brand new to running a blog however I do write in my journal on a
daily basis. I’d like to start a blog so I will
be able to share my experience and thoughts online. Please
let me know if you have any suggestions or tips for
new aspiring bloggers. Appreciate it!
Coral says:
Génialement faite site, la mise en page me plaît beaucoup !
Cela a certainement demandé énormément d’ travail.
Overwatch 2 Competitive Guide|Https://Overwatch2Fans.Com/ says:
Truly loads of good facts!
My web-site … https://overwatch2Fans.com/
web site says:
User experience is becoming a big factor even in adult niches
Also visit my web-site; https://eracareers-uk.info
오피아트 says:
I think the admin of this site is in fact working hard in support of
his site, because here every information is quality based
stuff.
블랙상위 SEO기술 @HackPBN says:
Does your blog have a contact page? I’m having problems locating
it but, I’d like to shoot you an email. I’ve got some creative ideas for your blog you might be interested in hearing.
Either way, great site and I look forward to seeing it grow over
time.
red Dead redemption 2 weapons|https://reddeadstation.com/ says:
With thanks! I like this!
my web blog; https://Reddeadstation.com/
Delila Myer says:
I like the helpful info you provide in your articles.
I’ll bookmark your weblog and check again here regularly.
I am quite sure I will learn plenty of new stuff right here!
Good luck for the next!
Also visit my blog post Battlefield 2042 walkthrough|https://battlefield2042play.Com/
오밤 says:
Thank you for the good writeup. It in reality used to be a
amusement account it. Look complex to more added agreeable from you!
However, how can we keep in touch?
무료성인야동 says:
Explore the top platform for discovering safe and reputable sites to watch free adult videos. We provide detailed reviews, current information, and exclusive access to reliable adult video platforms. Our expert recommendations ensure you find trustworthy sources for enjoying high-quality adult content securely. Join us to find the best sites for free adult videos online. 무료성인야동
미국야동 says:
Explore the premier platform for accessing a variety of high-quality Western adult video services. We provide detailed reviews, current information, and exclusive access to the best sources for Western adult content. Our expert recommendations ensure you have a superior and secure viewing experience. Join us to discover the top services for diverse and premium Western adult videos online. 미국야동
먹튀정보 says:
Our platform helps you identify and avoid online scam gambling sites. We provide comprehensive reviews, user feedback, and verified ratings to ensure you gamble safely. Stay informed with our regularly updated blacklist of fraudulent websites. Trust us to guide you to secure and reputable gambling platforms. 먹튀정보
검증커뮤니티 says:
Our platform helps you identify and avoid online scam gambling sites. We provide comprehensive reviews, user feedback, and verified ratings to ensure you gamble safely. Stay informed with our regularly updated blacklist of fraudulent websites. Trust us to guide you to secure and reputable gambling platforms. 검증커뮤니티
사이트주소 says:
Discover the ultimate platform for the latest domain guides on adult content, webtoons, office sites, torrents, movies, TV shows, sports TV, safest betting sites, adult products, and overseas Korean sites. Our comprehensive site offers expert reviews, updated information, and exclusive access to the best resources across these categories. Stay informed with detailed analysis and the newest trends in the online world. Whether you’re seeking entertainment, secure betting, or domain advice, our recommendations ensure you find the best sites available. Join us to access the most reliable and current domain guides online. 사이트주소
온라인슬롯 says:
Discover the premier platform for accurate information on safe and verified online slot sites. We offer detailed reviews, up-to-date insights, and exclusive access to trusted slot platforms. Our expert recommendations ensure you enjoy a secure and reliable gaming experience. Join us to explore the best online slot sites with confidence. 온라인슬롯
슬롯이기는법 says:
Looking for information to win at casinos, slots, and baccarat? Join us for a reliable experience. We introduce the top information community providing safe and verified information on casinos, slots, and baccarat. Discover secure and authentic gaming insights with us today. 슬롯이기는법
블랙상위 SEO기술 @HackPBN says:
Simply desire to say your article is as surprising.
The clearness in your publish is simply nice and that i can assume you are an expert in this subject.
Fine with your permission let me to grab your RSS feed to stay updated with approaching post.
Thank you 1,000,000 and please carry on the gratifying work.
시알리스 says:
I am extremely impressed with your writing skills and also with the
layout on your weblog. Is this a paid theme or did you customize it yourself?
Either way keep up the excellent quality writing, it’s rare to see a nice blog
like this one these days.
Van Escort Portalı says:
Konu anlaşılır olmuş.
Ben de Van escort için araştırıyordum.
İşime yaradı.
Also visit my webpage – http://mirae.jdtsolution.kr/bbs/board.php?bo_table=free&wr_id=238168
web page says:
We stumbled over here different website and thought I might check things out.
I like what I see so i am just following you.
Look forward to looking over your web page for a
second time.
비아그라 says:
Saved as a favorite, I love your site!
website says:
Not all adult sites are the same — some clearly care about quality
Here is my webpage https://seducedtrannies.com
canada pharmacy online says:
otc canadian pharmacy: https://canadianpharmacy-usa.net/# – online pharmacy canada
1win casino says:
https://1win-spanish.com/pt/, 1win casino дарит увлекательные ставки для почитателей азартных развлечений.
Mellstroy Ставки says:
Mellstroy Казино, https://mellstroyzerkalo.com/stavki-na-sport/ на Спорт предлагает удивительный выбор игр, включая классические автоматы и настольные развлечения.
Freddy says:
Aradığınız profesyonel bir Mersin escort deneyimi için aradığınızı buldunuz. Galerilerde göreceğiniz arkadaşların tamamı birebir paylaşımlara sahiptir. Sitemizde bulunan tüm model, Mersin’in en beğenilen isimlerinden seçilmiştir
Here is my web page … https://geilebookmarks.xyz/story.php?title=mersin-eskort-bayan-5
canadian pharmacy no prescription generic cialis says:
canadian pharmacy usa: https://canadianpharmacy-store.net/# – canadian pharmacy without prescription
Live Site Site says:
With thanks, Numerous facts.
My web site :: https://cz.frompo.com/
http://shop.westernboots.com.ua/?p=222460 says:
курсы визажа для себя, http://shop.westernboots.com.ua/?p=222460 помогут вам освоить секреты макияжа. Уроки направлены на развитие ваших навыков.
https://paskatina.lt/kakie-bukmekery-predostavljajut-fribety-4/ says:
фрибет за регистрацию, https://paskatina.lt/kakie-bukmekery-predostavljajut-fribety-4/ – это отличный способ начать игровую карьеру!
https://stage.lacarte.de/die-aufregende-welt-der-online-casinos-chancen-und/ says:
Eine casina online casino, https://stage.lacarte.de/die-aufregende-welt-der-online-casinos-chancen-und/ stellt zahlreiche Unterhaltungsoptionen, die Unterhaltung liefern. Gamer sind in der Lage von dem Zuhause zu genießen.
https://bioquinor.com/zhenskaja-odezhda-optom-iz-turcii-kachestvo-stil-i/ says:
Турецкие товары оптом, https://bioquinor.com/zhenskaja-odezhda-optom-iz-turcii-kachestvo-stil-i/ дают возможность бизнесу укреплять ассортимент.
https://kanoonesabz.ir/koifortune-casino-poland-najlepsza-zabawa-i/ says:
KoiFortune Casino, https://kanoonesabz.ir/koifortune-casino-poland-najlepsza-zabawa-i/ to świetne miejsce dla miłośników gier hazardowych. Dostarcza szeroki selekcję gier, od slotów, aż po stoły z ruletką.
anime games missions says:
Thanks a lot! Terrific stuff.
My blog post – https://habitatetc.com/
Cyberpunk 2077 Cheats says:
You actually stated it effectively!
My web-site https://cyberpunk2077hub.com/
http://grido.cl/2026/02/apuestas-deportivas-en-uruguay-guia-completa-y-22/ says:
Las casas de Apuestas, http://grido.cl/2026/02/apuestas-deportivas-en-uruguay-guia-completa-y-22/ proporcionan una opción emocionante para quienes a las apuestas. Dichas plataformas disponen variadas opciones para jugar en competencias.
https://bsq.cl/pronosticos-de-futbol-claves-para-aciertos-en-2/ says:
En el mundo del deporte, las intrigantes predicciones futbol, https://bsq.cl/pronosticos-de-futbol-claves-para-aciertos-en-2/ son un tema realmente discutido.
Heriberto says:
Paylaşım işe yaradı.
Ben de Van eskort bayan için araştırıyordum.
Teşekkürler.
My website https://oke.zone/profile.php?id=92853
http://www.castleandson.com/the-evolution-of-forex-trading-with-tradersunited/ says:
Forex Broker, http://www.castleandson.com/the-evolution-of-forex-trading-with-tradersunited/ adalah entiti maupun jalan yang memfasilitasi trader dalam melaksanakan perdagangan valuta di pasaran.
https://encant.elcorriol.com/non-uk-license-casinos-what-players-need-to-know-2/ says:
Exploring the realm of non UK online casino, https://encant.elcorriol.com/non-uk-license-casinos-what-players-need-to-know-2/ provides users with distinct experiences. By using various choices, they can enjoy excitement from wherever they are.
tournois alexander casino says:
Thanks for finally writing about > ROS從”零”
開始 – 4. ROSSerial_Arduino測試 (RC servo運轉, 示範subscriber) – 良棋科技 (Z 機研) < Liked it!
Zenless Zone Zero guide says:
Nicely voiced certainly! .
Check out my site https://Www.zenlesszerohub.com/
PUBG Tips says:
Awesome posts, Appreciate it.
my blog – https://Pubgfanshub.com/
https://u-wigo.co/blog/la-emocion-de-la-ruleta-estrategias-y-consejos-6/ says:
La ruleta, https://u-wigo.co/blog/la-emocion-de-la-ruleta-estrategias-y-consejos-6/ es un pasatiempo que atrae a muchos entusiastas en todo el mundo. La emoción de invertir en un resultado hace que este juego sea único y adictivo.
game Videos says:
Very great post. I simply stumbled upon your weblog and wanted
to say that I’ve really loved surfing around your weblog posts.
In any case I’ll be subscribing in your feed and I’m hoping you write once more soon!
Feel free to surf to my blog post game Videos
https://iesgo.iesgo.edu.br/los-mejores-casinos-online-guia-completa-para-5/ says:
casinos online, https://iesgo.iesgo.edu.br/los-mejores-casinos-online-guia-completa-para-5/ – Los salones de juego ofrecen una experiencia emocionante y divertida para los jugadores.
строительный контроль says:
Технический надзор или строительный надзор
legal and compliance says:
That is a fascinating topic regarding the shifting real estate landscape. I’ve been tracking how initial positioning actually acts as a behavioral trigger to potential purchasers. It’s interesting to see momentum is shaped by where the property is positioned compared to recent settled sales. I personally believe that understanding market depth and logic behind search filters can make a huge difference in listing outcomes. Do anyone else feel that transparency is becoming more essential given current SA consumer laws? Anyway, thanks for starting this conversation! I am keen to see how these market trends go over the next season.
https://andrew-summers.thoughtlanes.net/market-value-pricing-building-competition-the-right-way
Diane Bunny says:
Nice response in return of this question with solid arguments and telling everything
about that.
my blog post; https://Www.Blackmythonline.Com
Kevin Peterson says:
What Are the Best Stern Pinball Machines. Stern Pinball has been the heartbeat of the pinball world for decades, and wow — their machines just keep getting better! Whether you’re a hardcore collector, an operator wanting top-tier earnings, or a home buyer looking for an unforgettable game room centerpiece, Stern delivers excitement, immersion, and incredible build quality. Stern pinball machines for sale Europe
https://mojopinballlimited.com/what-are-the-best-stern-pinball-machines/
Let’s dive into the best Stern pinball machines that consistently stand out for players, operators, and enthusiasts worldwide. Stern pinball machines Europe
James Crush says:
CFMOTO UForce 1000 XL for Sale – Ultimate 6-Seater Utility UTV for Work and Adventure
The CFMOTO UForce 1000 XL is a powerful, reliable, and versatile 6-seater utility side-by-side UTV designed for heavy-duty work and outdoor adventure. Built with performance, durability, and comfort in mind, this premium utility vehicle is ideal for farms, construction sites, ranches, and recreational use.
https://kvcmachines.com/product/cfmoto-uforce-1000-xl-for-sale/
this site says:
Hi to all, how is everything, I think every one is getting more from this
site, and your views are fastidious for new people.
funnelhackers.club says:
Sqirk Instagram Viewer is a convenient online tool intended for users who desire to browse Instagram content speedily and discreetly without logging into their account. past Sqirk Instagram Viewer, you can view public profiles, stories, highlights, reels, and posts in a simple, available interface. Its especially cooperative for people who desire to probe content anonymously, check profiles without rejection a trace, or admission Instagram media from substitute devices. The tool works directly through your web browser, meaning theres no infatuation to download any apps or software. Overall, Sqirk Instagram Viewer offers a fast, easy, and private habit to stay updated subsequently Instagram content.
website here says:
When I initially commented I clicked the “Notify me when new comments are added” checkbox and now each time a comment is added
I get several e-mails with the same comment. Is there any way you
can remove me from that service? Thank you!
League Of Legends meta says:
You’ve made some really good points there. I looked on the net to find out more about the issue and found most people will go along with your views on this website.
Here is my blog post – League Of Legends meta
instagram private viewer says:
Sqirk Instagram Viewer is a convenient online tool expected for users who want to browse Instagram content quickly and discreetly without logging into their account. subsequently Sqirk Instagram Viewer, you can view public profiles, stories, highlights, reels, and posts in a simple, manageable interface. Its especially cooperative for people who desire to consider content anonymously, check profiles without leaving behind a trace, or permission Instagram media from every other devices. The tool works directly through your web browser, meaning theres no habit to download any apps or software. Overall, Sqirk Instagram Viewer offers a fast, easy, and private pretentiousness to stay updated taking into account Instagram content.
Mikel says:
Good facts Thank you!
Here is my blog: https://Leagueoflegendsguide.com/
private instagram viewer app says:
Sqirk Instagram Viewer is a convenient online tool expected for users who want to browse Instagram content speedily and discreetly without logging into their account. subsequent to Sqirk Instagram Viewer, you can view public profiles, stories, highlights, reels, and posts in a simple, straightforward interface. Its especially compliant for people who desire to explore content anonymously, check profiles without rejection a trace, or entrance Instagram media from oscillate devices. The tool works directly through your web browser, meaning theres no craving to download any apps or software. Overall, Sqirk Instagram Viewer offers a fast, easy, and private artifice to stay updated past Instagram content.
iphone купить уфа says:
Hello, after reading this remarkable post i am as well cheerful to share my
familiarity here with friends.
anime Game dlc says:
Great post. I will be going through some of these issues as well..
Also visit my website: anime Game dlc
генератор презентаций нейросеть says:
сделать презентацию нейросеть бесплатно
sell bitcoin in india says:
This helpful guide simplifies selling bitcoin in india with clear steps and trusted platforms.
http://estolaid.com/communication/forum/user/9881/ says:
сумки женские, http://estolaid.com/communication/forum/user/9881/ — это неотъемлемая часть любого образа. Такые аксессуары придают стиль и искусность наряда.
comment-273389 says:
сумки женские, http://teamyokomo.pl/about/?unapproved=273389&moderation-hash=489b66ebf984018eff69ff0b29448425#http://teamyokomo.pl/about/?unapproved=273389&moderation-hash=489b66ebf984018eff69ff0b29448425 – это неотъемлемая часть гардероба каждой модницы.
http://www.vloeimans.com/index.php?title=User:BaileyWcz11298 says:
SEO-продвижения сайта, http://www.vloeimans.com/index.php?title=User:BaileyWcz11298 включает в себя улучшение контента
и анализ ключевых слов.
https://sitebrewers.com/stmark/new-2/rainbet-casino-site-gamings-library-4/ says:
Popular games at Rainbet, https://sitebrewers.com/stmark/new-2/rainbet-casino-site-gamings-library-4/ include a wide selection of exciting options.
Players can explore everything from classic video slots to captivating table games.
sky-crown-casino.net says:
Everyone loves what you guys are up too.
This sort of clever work and exposure! Keep up the excellent works guys I’ve added you guys to my
personal blogroll.
소액결제현금화 says:
진짜 좋은 포스팅 감사합니다! 무엇보다 재테크 관련하여 정보가 필요한데, 소액결제현금화 상담을 자세히 공유해주시니 큰 힘이 됩니다. 신속한 현금화서비스 문의는 언제라도 환영합니다. 자주 들러서 유익한 내용 기대할게요. 활기찬 주말 되시길!
cricket news says:
Get closer to the action with cricket news that captures
every important moment.
slot online says:
At this moment I am going to do my breakfast, later
than having my breakfast coming again to read additional
news.
секс видио чат says:
I like the valuable info you supply to your articles.
I will bookmark your weblog and test again right here frequently.
I am moderately sure I’ll learn a lot of new stuff proper
right here! Good luck for the following! https://xn--100-8cdo0a7aac8a.xn--p1acf/read-blog/22337_vebkam-chat-ruletka.html
ice fishing slot says:
Le attractif monde de la pêche sur glace mélange l’aventure et le amusement. Les amateurs se regroupent pour savourer une journée unique de pêche avant de se diriger vers l’ice fishing casino, https://play.google.com/store/apps/details?id=com.froostt.fissinng&gl=fr&hl=fr-fr.
download joker123 says:
I used to be able to find good information from your content.
my web-site; https://Ifls2Wqouxxbitwjr44Fpirkghtehebbujs4MF4Frjbtl62Fmfsa.Cdn.Ampproject.org/c/fairviewumc.church%2Fbbs%2Fboard.php%3Fbo_table%3Dfree%26wr_id%3D2190882
onlinegambling-au.com says:
Awesome article.
https://emails.new2new.com/paphos-airport-taxi-your-convenient-transfer/ says:
taxi in larnaca, https://emails.new2new.com/paphos-airport-taxi-your-convenient-transfer/ is a convenient|fast|affordable|reliable option for travelers.
https://jaybabani.com/ultra-wp-admin/?p=228572 says:
skylark vpn, https://jaybabani.com/ultra-wp-admin/?p=228572 — это надежный сервис для анонимности в интернете.
webpage says:
I’m Arthur and I live with my husband and our two children in Bordeaux, in the CENTRE south area.
My hobbies are Fishing, Roller skating and Shortwave listening.
Gsa ser link list says:
Discover prospecting strategies and outreach techniques that lead to even more sales with minimum input.
Look into my homepage https://www.facebook.com/serverifiedlists/
collier Photo says:
Wow, that’s what I was seeking for, what a stuff! existing here
at this web site, thanks admin of this website.
bracelet liberty says:
Fine way of describing, and pleasant post to obtain data concerning my presentation focus, which i am
going to deliver in institution of higher education.
Also visit my web blog: bracelet liberty
крипто босс казино says:
Superb blog! Do you have any hints for aspiring writers?
I’m planning to start my own site soon but
I’m a little lost on everything. Would you suggest
starting with a free platform like WordPress or go for a paid
option? There are so many choices out there that I’m completely overwhelmed ..
Any ideas? Thank you! https://cryptoboss885.top/
Betify says:
My name: Dominick Lionel
My age: 40
Country: Italy
City: Lazfons
ZIP: 39043
Street: Via San Domenico 122
1win официальный вход says:
1win официальный сайт, 1win официальный вход предоставляет пользователям уникальную возможность удобно делать ставки и наслаждаться.
승신 says:
That is a really good tip particularly to those new to the blogosphere.
Brief but very precise info… Thanks for sharing
this one. A must read post!
https://gdepamyatniki.ru/ says:
Как выбрать гранитный памятник корректно
18-7rid5dvd2b0a.com says:
Remarkable issues here. I am very satisfied to peer your
article. Thank you a lot and I am taking a look ahead to touch you.
Will you kindly drop me a e-mail?
brawl stars knockout Tips|Https://brawlstarsinsight.com/ says:
You actually reported it exceptionally well!
My site; https://brawlstarsinsight.com
Русские замены англицизмов says:
Борьба с англицизмами
https://zetfail.ru/professionalnaya-himiya-dlya-klininga-vybor-pravila-i-prakticheskie-sovety.html says:
Профессиональная химия для клининга — это основа качественной и эффективной уборки в коммерческих и жилых помещениях. В отличие от бытовых средств, такие составы обладают усиленной формулой, позволяющей быстро справляться с жиром, налётом, загрязнениями и бактериями.
www.ictlt.com says:
Write more, thats all I have to say. Literally, it seems as though you relied on the
video to make your point. You definitely know what youre talking about, why
throw away your intelligence on just posting videos to your
weblog when you could be giving us something enlightening to read?
xxx says:
Keep on writing, great job!
mostbet online says:
Love mostbet, keep it up — amazing content!
mostbet online
60 high authority links says:
Wonderful postings. Thanks a lot!
https://resident.com/resource-guide/2025/09/25/why-dry-eye-is-so-common-in-new-york-and-the-best-ways-to-treat-it says:
sunglasses EyeOns, https://resident.com/resource-guide/2025/09/25/why-dry-eye-is-so-common-in-new-york-and-the-best-ways-to-treat-it provide fashionable defense against dangerous UV rays.
Je vous conseille de tester BassBet Casino si vous aimez les jeux de table en direct. says:
Article très complet et détaillé.
gagner de l'argent says:
C’est très bien expliqué, merci.
Marko Summerfield says:
Hurrah! At last I got a blog from where I can actually obtain useful information regarding my study and knowledge.
Also visit my blog; Thalia
https://donjurist.ru/blog/bankrotstvo-mfc/mogut-li-kreditory-osporit-vashe-bankrotstvo-cherez-mfc/ says:
банкротство физических лиц
NyxBets casino says:
online casino, https://nyxcasino.org/ features an exciting array of games for players. From slots to table games, the thrill is unmatched. Sign up now to enjoy your chance to win big!
купить кондиционер в хабаровске says:
вентиляционное оборудование, https://xn--80aefojgimj2ah.xn--p1ai/categories/kondicionery-dlya-doma включает в себя важный компонент современных конструкций.
https://711casinobonus.com says:
Interessante invalshoek.
Chicken road game says:
my homepage Chicken road game
best online pokies australia says:
If you are on the hunt for the latest https://aussieoddster.com/ platforms with no-wagering bonuses, Aussie Oddster has the inside scoop.
Link Result Toto 4D says:
If you would like to obtain a great deal from this piece of
writing then you have to apply these methods to your won website.
KansinoCasinoBonus777 says:
Helemaal mee eens.
betrouwbaar gokken says:
Goeie tips.
kukimuki says:
hey there and thank you for your information – I’ve definitely picked
up anything new from right here. I did however expertise a few technical
points using this web site, as I experienced to reload the website a lot of
times previous to I could get it to load properly.
I had been wondering if your web hosting is OK? Not that I’m complaining, but sluggish loading
instances times will very frequently affect your placement in google and can damage your high-quality score
if ads and marketing with Adwords. Anyway I’m adding this RSS to my email and
can look out for much more of your respective interesting content.
Make sure you update this again soon.
www.casinomrxbetfr.com says:
Je n’y avais pas pensé sous cet angle pour jouer.
glory casino website says:
glory casino website
Spin Rise live casino says:
Spinrise casino, https://spinrisecasino.ch/ – Im Spinrise casino bietet zahlreiche Spielen, die den Geschmack gerecht werden. Die ästhetische Gestaltung und die komfortable Navigation sorgen für ein einmaliges Erlebnis.
De klantenservice van Get Lucky Casino reageert altijd erg snel en behulpzaam says:
Leuk om te lezen.
Overwatch 2 dps guide says:
Very good posts, Kudos.
my page https://Overwatch2base.com/
pin-up-casino-8g5rz.lol says:
pin up casino зеркало, pin-up casino позволяет
игрокам посещать любимые автоматы.
Feel free to surf to my blog :: pin-up-casino-8g5rz.lol
veilig gokken op internet says:
Bedankt voor deze nuttige review!
Nicely done says:
Hi there! I know this is somewhat off topic but I was wondering which blog platform are
you using for this website? I’m getting
fed up of WordPress because I’ve had issues with hackers and I’m looking at alternatives for another platform.
I would be awesome if you could point me in the direction of a good
platform.
PS5 Cheats says:
Why users still use to read news papers when in this technological
globe all is accessible on web?
Also visit my homepage :: PS5 Cheats
Mojabet CD says:
Mojabet Casino, Mojabet CD est un endroit
idéal pour les amateurs de jeux d’argent. Avec une vastes gamme
de options, ce casino garantit un vrai divertissement.
Visitez-nous et tentez votre chance !
https://pin-up-casino-07hox.icu says:
Если вы ищете замену для доступа к играм, то pin up casino зеркало, pin-up
casino – это отличный выбор.
My blog post … https://pin-up-casino-07hox.icu
Millionz Casino says:
https://millionz-casinofr.eu/, Millionz Casino met à disposition une plaisir de jeu singulière. Diverses machines à sous sont accessibles, donnant aux joueurs de accumuler des gains énormes.
https://pinco-casino-9mqje.icu/ says:
pinco казино, пинко казино — это особенное место для фанатов
азартных игр. Здесь имеются разнообразные слоты и игры на любой вкус.
my blog post: https://pinco-casino-9mqje.icu/
www.tortuga-casino.casino says:
Merci pour le conseil.
https://prestigioushomecare.net/2026/05/01/vbet-casino-live-experience-casino-en-direct/ says:
J’ai appris des choses, à bientôt.
https://paradiseweddingsworldwide.com/ says:
Leuk om te lezen.
http://www.czmjzx.com/ says:
Dit wist ik nog helemaal niet.
pokie games online says:
This is unreal! I’ve been following Michael Taylor’s previews, and now aussieoddster.com is
live. I’m keen to find a casino with a good
live casino section.
пинко казино says:
pinco казино, пинко казино — это исключительное место для ценителей азартных игр.
Container House says:
You made your stand pretty clearly!!
Starfield secrets|https://starfieldgalaxy.Com/ says:
Thank you! Loads of material!
Visit my web-site … https://starfieldgalaxy.com/
Ice Fishing casino says:
Also visit my webpage: Ice Fishing casino
1win-i2g93.xyz says:
1 вин официальный сайт, 1win предлагает своим пользователям широкий выбор услуг.
Also visit my homepage – 1win-i2g93.xyz
Monster Hunter Wilds weapons|https://monsterwildlands.com/ says:
I really like it when people come together and share thoughts.
Great site, continue the good work!
Also visit my site :: Monster Hunter Wilds weapons|https://monsterwildlands.com/
https://www.directoryaziende.eu/najlepsze-polskie-kasyna-online-przewodnik-po-kasynach-internetowych-w-polsce/ says:
najlepsze polskie kasyna online, https://www.directoryaziende.eu/najlepsze-polskie-kasyna-online-przewodnik-po-kasynach-internetowych-w-polsce/ oferują szeroki wachlarz gier, obejmujących poker, ruletka i automaty.
https://villa20sopot.pl/2026/05/17/exploring-the-world-of-trans-live-cam-a-celebration-of-diversity/ says:
In the world of internet leisure, free live cam girls, https://villa20sopot.pl/2026/05/17/exploring-the-world-of-trans-live-cam-a-celebration-of-diversity/ offer an exciting opportunity to connect.
ROBLOX strategy|https://Robloxrealm.com/ says:
Truly many of very good knowledge.
Here is my website; https://Robloxrealm.com/
situs togel resmi says:
I could not refrain from commenting. Exceptionally well written!
1win-xzqk5.cfd says:
1 вин официальный сайт, 1win предлагает широкий
выбор игр и захватывающий опыт.
Любой может найти здесь развлечение.
My website – 1win-xzqk5.cfd
https://profile.hatena.ne.jp/polezno/profile says:
public holidays, https://profile.hatena.ne.jp/polezno/profile serve as special occasions when communities come together to honor important events or customs. These days often create a sense of belonging.
click here says:
Very helpful post.
https://cryptorescue.org/columns/understanding-pix-payments-online-casinos-crypto-user-perspective/ says:
The Evolution and Dynamics of Digital Betting Sites
It's easy to see why Instant Casino is becoming so popular among players. says:
Excellent breakdown.
logintovegasino.com says:
Good points here.
https://linktr.ee/Cecilia_Coleman says:
Туроператор Азурит, https://linktr.ee/Cecilia_Coleman предлагает разнообразный выбор вояжи для туризма по разным направлениям.
gambling says:
Thanks for the tips.
สล็อต says:
You said it perfectly.!
PuppyBet says:
Thanks for the update.
source says:
Info well taken!!
www.rainbetcasinobonus.com says:
I totally agree with your points.
check it out says:
You mentioned that effectively.
you will find a huge collection of megaways slots at RakeBit Casino says:
Awesome tips, thanks for sharing.
kraken сайт says:
кракен даркнет — как ключевой фразы используется в разных контекстах. С практической стороны: кракен вход. Ниже идёт прикладной комментарий. Если анализировать построение, становится заметно, что данная схема не зацикливается в одном виде, и меняется между вариантами. Цель этого текста — дать возможность избежать типичных ошибок в теме кракен купить криптовалюту.
http://xn--son8-01a.org
Https://iz-phoenix.Com/ says:
Many thanks, Fantastic stuff.
Een van de meest gerespecteerde en bekende namen in de Nederlandse gokmarkt is natuurlijk Holland Casino says:
Precies wat ik zocht, dank je.
tripscan зеркало says:
Attractive section of content. I just stumbled upon your site and in accession capital to assert that
I acquire in fact enjoyed account your blog posts.
Anyway I’ll be subscribing to your feeds and even I achievement you
access consistently quickly.
exterior painting Aurora CO says:
This is nicely put. !
1xbet официальный сайт says:
Чтобы получить доступ к сайту, многие игроки используют зеркало 1хбет, 1xbet официальный сайт.
Оно обеспечивает открытый вход в аккаунт.
HVAC services Castle Rock CO says:
For most recent information you have to pay a quick visit the web and on web I found this website as a most excellent site for most up-to-date
updates.
deck repair and maintenance company in Madison says:
Appreciate it! An abundance of knowledge.
1win bono says:
1win casino, 1win bono dispone una experiencia asombrosa para
los amantes de los juegos de azar. Con una amplia selección de juegos,
los jugadores pueden disfrutar de sesiones emocionantes.
https://1xbet-gx4y8.icu says:
зеркало 1xbet, 1xbet — это отличный способ обойти блокировки и получить доступ к своим любимым играм.
Here is my webpage: https://1xbet-gx4y8.icu/
https://casinocasoola.net/app says:
casino casoola, https://casinocasoola.net/app organiseert een uitgebreide selectie van games. Spelers kunnen te genieten van live dealers en enthousiaste communityleden. Ontdek het plezier van spelen bij casino casoola!
https://spainslov.ru/site/word/word/ says:
Парфюмерия оптом, https://spainslov.ru/site/word/word/%D0%92%D0%97%D0%92%D0%98%D0%92%D0%90%D0%A2%D0%AC предоставляет уникальную возможность для бизнесменов.
Casinò Prelievo Immediato says:
I Ludoteche mettono a disposizione prelievo istantaneo per attrarre i clienti. Casinò Prelievo Immediato, https://orchestragiovanileveronese.it/ risulta una fantastica opzione sul tema di quelli che vogliono partecipare senza attese.
Beinmassage Karlsbad says:
professionelle Massage, https://sergiobotticelli.cz/de/services/lymphdrainage-massage/ ist eine vorzügliche Methode zur Erholung. Sie steigert die Blutfunktion und lindert Muskelschmerzen. Die sinnvolle Behandlung kann physische deutlich verbessern und eine umfassende Entspannung erreichen.
ck444 says:
The ck444 game, ck444 offers an exciting adventure for players. In this dynamic world, you can discover multiple challenges and missions that keep you occupied. Whether you’re a casual or a skilled gamer, https://ck4444.uk.com/ game has something for everyone.
1xbet app says:
Téléchargez maintenant 1xbet apk download, 1xbet app et plongez dans le monde des paris
sportifs. L’application vous facilitera de participer sur vos matchs préférés avec facilité.
Profitez d’une expérience de pari inoubliable!
winbeatz says:
winbeatz online casino, winbeatz ponúka široký výber eventov, ktoré uspokoja všetkých
hráčov hazardu. Pretekajte o výhry a tešte sa na vzrušujúcu atmosféru!
https://l-parfum.ru/catalog/tom-ford/Tussan-Leather/ says:
Парфюмерия оптом, https://l-parfum.ru/catalog/tom-ford/Tussan-Leather/ — это отличный способ начать свой бизнес или расширить существующий.
top online casino pakistan says:
online casino pakistan, top online casino pakistan offers an exciting opportunity
for gamers. Players can relish a variety of options, from slots to live dealer games.
With protected payment methods, it’s easy to wager online
and win big!
wellness masáž Karlovy Vary says:
profesionální masáž, https://sergiobotticelli.cz/cs/services/anticelulitni-masaz/ je běžnou metodou terapie. Pomáhá náladu a snižuje napětí. Mnozí by měli užít tuto významnou službu.
banger casino says:
At the banger casino, banger casino bangladesh,
players have the chance to experience entertainment
like never before. With multiple games available, each type of gamer will find an experience that suits their style.
Don’t miss the moment to win big!
1xbet app says:
Pour améliorer votre expérience de jeu, il est indispensable de télécharger 1xbet apk, https://bormioliroccopackaging.com/. Grâce à cette application, vous aurez accès à une large gamme de paris sportifs.
https://ab-news.ru/stavki-na-cs2-rukovodstvo-dlya-betterov-2025 says:
Leon casino, https://ab-news.ru/stavki-na-cs2-rukovodstvo-dlya-betterov-2025 предлагает широкий спектр азартных игр.
1xbet app says:
Pour les amateurs de paris en ligne, 1xbet télécharger,
1xbet app est
une étape essentielle. Ce plateforme fameuse pour son vaste
choix de pari. Les joueurs peuvent tirer parti
d’offres attractives. De plus, l’interface s’avère être conviviale.
ck444 says:
https://ck444.boats/ casino, ck444 offers a captivating gaming experience for enthusiasts. With diverse options of games, everyone can find something they love. Become a member the fun today!
meilleurs casinos en ligne says:
Le meilleur casino en ligne, https://saumondefrance.eu/ fournit une expérience ludique singulière. Les amateurs de jeux peuvent tirer avantage de nombreuses choix de jeux variés.
https://vdecret.com/dosug/kto-takie-individualki-ponyatie/ says:
снять проститутку, https://vdecret.com/dosug/kto-takie-individualki-ponyatie/ — это решение, которое требует обдуманности.
Noodle Game Collectibles|Https://Noodleinsight.Com/ says:
With thanks, Quite a lot of postings.
My web page – https://Noodleinsight.com/
gaming peripherals review|https://Pcbuildinsight.com/ says:
You stated that terrifically.
Take a look at my blog post :: https://Pcbuildinsight.com/
https://mp3.cc/ says:
Are you looking to seek a way to Download mp3 free, https://mp3.cc/?
Nowadays, numerous websites offer easy access to tunes without fee.
Ensure to select reliable sources for protected downloads.
Enjoy your favorite tracks!
casino en ligne says:
Découvrez le meilleur casino en ligne, meilleur https://neemo.eu/ qui vous pouvez jouer en toute sécurité. Bénéficiez de diverses options de divertissements. Inscrivez-vous dès maintenant!
купить бошки says:
Риск от наркотиков — этто групповая хоботня, охватывающая физическое, психическое также соц
здоровье человека. Утилизация таковских наркотиков,
яко кокаин, мефедрон, ямба, «наркотик» чи «бошки», может родить
к необратимым следствиям яко чтобы
организма, так и чтобы федерации
в течение целом. Но даже при выковывании
подневольности эвентуально электровосстановление — главное, чтобы зависимый
явантроп направился согласен помощью.
Эпохально помнить, что наркозависимость лечится, и реабилитация бабахает
шанс на новую жизнь.
https://nandisergonomia.com.br/2026/06/08/los-mejores-casinos-en-uruguay-disfruta-de-la-aventura-y-la-diversion/ says:
pronósticos deportivos Uruguay, https://nandisergonomia.com.br/2026/06/08/los-mejores-casinos-en-uruguay-disfruta-de-la-aventura-y-la-diversion/ – Los análisis deportivos Uruguay son claves para analizar el rendimiento de los equipos.
Транс знакомства в Улан-Удэ says:
Вариант «знакомства для поиска пары» удобен для знакомства по интересам без лишней спешки. На сайте легко найти анкету для первого сообщения. Для первого контакта начните разговор без сложных формальностей. Для дружеской переписки важно обсуждайте важные детали до личной встречи. перейдите к просмотру анкет, а затем расскажите немного о себе. сделайте первый шаг сегодня, если тема «знакомства для поиска пары» подходит вам без лишней спешки.
https://sennior.com.br/maximizing-productivity-tips-for-a-successful-workday/
https://aviatorjoc.org says:
Jocul Aviator online, joc aviator este o experiență captivantă la pasionații de amuzament. Aventura se dezvoltă pe măsură ce jucătorii sprijină cursa aerului. La fiecare rundă, șansele de câștig devin.
my web site … https://aviatorjoc.org/
All Rummy Games App says:
All Rummy Games App
All Teen Patti Apps says:
All Teen Patti Apps
All Bet App says:
All Bet App
Best Bet App says:
Best Bet App
GoGo Rummy says:
GoGo Rummy
new says:
купить Айфон 17, https://forum.psyonica.com/prochie/apple-iphone-17-kupit-ajfon-17/new/#https://forum.psyonica.com/prochie/apple-iphone-17-kupit-ajfon-17/new/ — отличный выбор, если вы ищете новейший смартфон.
https://etherions.com/predicting-kabaddi-outcomes-on-1xbet-using-team-and-player-form/ says:
1xBet India, https://etherions.com/predicting-kabaddi-outcomes-on-1xbet-using-team-and-player-form/ – The 1xBet India
platform offers an engaging experience for gambling
on sports.
steam sale tracker|https://dealnesthq.Com/ says:
With thanks, Plenty of content!
Stop by my webpage … https://Dealnesthq.com/
сео продвижение says:
https://pffactor.ru/seo-prodvizhenie/, сео продвижение — это ключевой аспект успешного онлайн-бизнеса.
Anh Curtiss says:
An impressive share! I have just forwarded this onto a coworker who had been doing a little research on this. And he actually bought me breakfast because I found it for him… lol. So allow me to reword this…. Thank YOU for the meal!! But yeah, thanx for spending time to discuss this matter here on your website.
Dusty Girardi says:
Good write-up. I certainly love this site. Stick with it!
Dan Neal says:
Wow, amazing weblog structure! How long have you been running a blog for? you made blogging look easy. The total look of your website is great, as neatly as the content!
https://investimentoaltorendimento.com says:
investimento de alto rendimento, investimento de alto rendimento
é uma ótima maneira de potencializar seus ganhos.
Aplicar corretamente pode assegurar retorno superior.
Analise o mercado e defina oportunidades vantajosas.
Here is my web blog :: https://investimentoaltorendimento.com
https://femida-justice.com/ says:
Юридические услуги Алматы, https://femida-justice.com/ обслуживают профессиональные юристы, готовые помочь с судебными разбирательствами.
prêt participatif says:
Le https://pretparticipatif.fr/ est une solution innovante pour soutenir des projets locaux. Grâce à cette proposition, les participants peuvent participer directement à des activités qui leur tiennent à cœur.
https://perevozimgruz.by/ says:
Грузоперевозки в Минске и Беларуси, Грузоперевозки Минск – Транспортировка в Минске и Беларуси — это значимая сфера, которая.
my website: https://perevozimgruz.by/
Leia Brune says:
Greetings! I know this is kinda off topic but I’d figured I’d ask. Would you be interested in exchanging links or maybe guest writing a blog post or vice-versa? My site discusses a lot of the same topics as yours and I think we could greatly benefit from each other. If you are interested feel free to send me an e-mail. I look forward to hearing from you! Superb blog by the way!
https://www.simplytests.com says:
Preparing for exams can be challenging, but with effective strategies, you can enhance your performance. Using study techniques like summarization and practice tests is crucial. Additionally, creating a study schedule helps in managing time.
my blog post; https://www.simplytests.com/
https://vulkan-isu75hn.sbs/ says:
casino vulkan, сайт вулкан старс предлагает богатый выбор азартных игр и ушедствий.
Здесь каждый пользователь найдет что-то заманчивое.
Review my webpage … https://vulkan-isu75hn.sbs/
https://femida-justice.com/materialy/regulirovanie-mezhevaniya/ says:
юридическая помощь в Казахстане, https://femida-justice.com/materialy/regulirovanie-mezhevaniya/ недоступна тем, кто встретился с правовыми вопросами.
PUBG online guide says:
You said it perfectly..
my blog – https://shuntaktravel.com/
https://ladytag.ru/ says:
В нашем уютном магазин парфюмерии, https://ladytag.ru/
доступны эксклюзивные ароматы от популярных брендов.
najlepsze kasyna internetowe w polsce says:
Na plus można zaliczyć, że serwis z recenzjami pokazuje temat bardziej przejrzyście!
Feel free to visit my page :: https://xxxbold.com/busty-babe-tessa-orlov-seduced-at-the-spa/
https://www.sikult.si/2026/02/25/3299/ says:
онлайн казино, https://www.sikult.si/2026/02/25/3299/ – Online casino present a thrilling journey for players looking to savor games from the comfort of home. With various games, bonuses, and promotions, the excitement is always on hand.
https://pobedimautism.ru/ says:
Парфюмерия, https://pobedimautism.ru/ — это искусство
создания уникальных ароматов, которые могут передавать эмоции.
пинап официальный сайт says:
В казино клиенты могут наслаждаться многообразными играми.
Also visit my web blog … пинап официальный сайт
Jessie Smith says:
I know this site offers quality based articles or reviews and extra material, is there any
other web page which presents these kinds of things in quality?
Feel free to surf to my web-site … Overwatch 2 Updates
https://mestam.info/ua/kiev/mesto/4942110-la-consulting-ulica-shelkovichnaya-24-24 says:
юридическая консультация, https://mestam.info/ua/kiev/mesto/4942110-la-consulting-ulica-shelkovichnaya-24-24 – это важный этап для решения правовых вопросов.
https://aromaaroma.ru/ says:
Ищете идеальный аромат? Наш магазин парфюмерии, https://aromaaroma.ru/ предлагает
разнообразный выбор духов со всего
мира.
https://krasa-market.ru/ says:
натуральная косметика, https://krasa-market.ru/
становится все более популярной среди людей,
стремящихся к здоровью и красоте.
https://richroger-nl.net/ says:
Als ik casino platforms vergelijk, kijk ik niet alleen naar het design; regels, bonussen en opnames zijn belangrijker. Gokken moet entertainment blijven, geen manier om geld te verdienen!
Here is my webpage https://richroger-nl.net/
https://vulkan-eho9.buzz/ says:
casino vulkan, официальный клуб вулкан предлагает уникальную
атмосферу для посетителей.
Also visit my webpage – https://vulkan-eho9.buzz/
LEON says:
Leon Casino, Leon Casino é um
destino imperdível para os amantes de jogos.
Com uma variedade incrível de máquinas
caça-níqueis, você poderá diversão garantida. Experimente as promoções incríveis!
pokerdom says:
покердом зеркало, покердом имеет удобный доступ к
азартным играм.
Feel free to surf to my web blog: pokerdom
https://aromline.ru/index.php?categoryID=235 says:
интернет-магазин парфюмерии, https://aromline.ru/index.php?categoryID=235 – В нашем сайте парфюмерии вы найдете множество духов от известных фирм.
https://rddweb.de/ says:
Das Visualisieren eines 3D Raums eröffnet neue Möglichkeiten. Durch fortschrittliche Software können Architekten detailreiche Entwürfe erstellen. 3D Raum zeichnen, https://rddweb.de/ fordert Fähigkeiten und praktisches Wissen.
Dead by Daylight Survivor guide says:
Useful material, Regards!
Also visit my web site; https://alesis-semi.com/
Joie says:
You said it effectively!
아트미출장마사지 says:
Iran’s attacks on Qatari and Saudi commercial tankers in the Strait of Hormuz, and repeated aggression against Bahrain and Kuwait, show Tehran remains incapable of committing to the requirements of de-escalation and “turning the page on war”, senior UAE diplomat Anwar Gargash says.세종출장마사지
russkoitalslovar.ru says:
Русско-итальянский словарь,
https://russkoitalslovar.ru/ помогает вам освоить новый язык.
https://bcpoker-site.com/ says:
online poker games, https://bcpoker-site.com/ offer
an exciting way to evaluate your skills. With a selection of formats, players can engage with both easy-going
and high-stakes matches.
Rummy Ola says:
Explore Rummy Ola for comprehensive guides, platform features, gameplay information, and the latest updates. Discover beginner-friendly tutorials, helpful resources, and regularly updated content that makes it easy to learn more about the platform in one convenient place.
Радиодетали says:
Радиодетали, Радиодетали
представляют собой ключевые компоненты в электронике.
собственник продал квартиру с долгами says:
быстрый выкуп недвижимости, https://msk-v24.ru/ гарантирует возможность ускоренно продать квартиру.
Raina says:
บทความนี้ มีประโยชน์มาก ครับ
ดิฉัน ไปอ่านเพิ่มเติมเกี่ยวกับ
ข้อมูลเพิ่มเติม
ที่คุณสามารถดูได้ที่ Dora
ลองแวะไปดู
เพราะให้ข้อมูลเชิงลึก
ขอบคุณที่แชร์ ข้อมูลที่มีประโยชน์ นี้
และหวังว่าจะมีข้อมูลใหม่ๆ มาแบ่งปันอีก
Josh Allen Wyoming Jersey says:
NCAA jerseys stand at the heart of college sports culture, blending athletic function, institutional identity, and emotional connection for student-athletes, alumni, and fans alike. Far beyond game-day apparel, they represent tradition, school spirit, and the shared history of hundreds of university athletic programs across the United States. https://www.collegegear.us/wyoming-josh-allen-jersey
Liliana Van Raalte says:
In the realm of xxxbp videos, https://togetherhealthy.de/hentai-anime-uncensored-porn-japanese-comic-strip-breasts-porn-open-sex-video, enthusiasts find a vast selection of engaging content.
https://1win-i053w.cfd says:
Шаги 1win регистрация, 1win практикуется для всех пользователей.
Необходимо заполнить свои
данные и принять с условиями.
Here is my web page – https://1win-i053w.cfd
https://1win-heyb9.buzz/ says:
1win casino, 1win предлагает широкий выбор игровых слотов для любителей азартных приключений.
my web blog … https://1win-heyb9.buzz/
1 вин официальный says:
1win casino, 1 вин официальный
дарит участникам невероятные возможности для развлечения.
por que vale a pena jogar ratinho sortudo demo says:
O ratinho sortudo oficial, https://melbaddrakugriom.info/ratinho-sortudo-demo é um personagem encantador que traz alegria e diversão para todos. Esse tem a habilidade de produzir momentos inesquecíveis.
Индивидуалки Славянск says:
Проститутки Славянска, https://imissslavyansk.com/ предлагают разнообразные услуги, что личные знакомства и сопровождение.
Черновцы индивидуалки says:
В Черновцах можно встретить разнообразных женщин, которые предлагают свои услуги.
Feel free to visit my blog post https://misschernivtsi.com/
1win зеркало на сегодня says:
1win официальный сайт, 1win зеркало на сегодня представляет впечатляющий
количество ставок.
Изюм путаны says:
Проститутки Изюма, Изюм путаны восхищают разнообразием
услуг, которые они предлагают.