Description
商品說明:
光達(LiDAR)是以雷射或紅外線的光源為主,並以360度旋轉方式射出光線,並以光線飛行遇到障礙物後反射回來的時間來計算直線距離,同時,可以得到2D水平旋轉平面的四周障礙物的相對距離,也就是所謂的2D光達建圖。隨著ˋ光達感測器可以測距離以及同步建出機器人目前四周的地圖,近來被大量用在市內自主導航的機器人應用上。
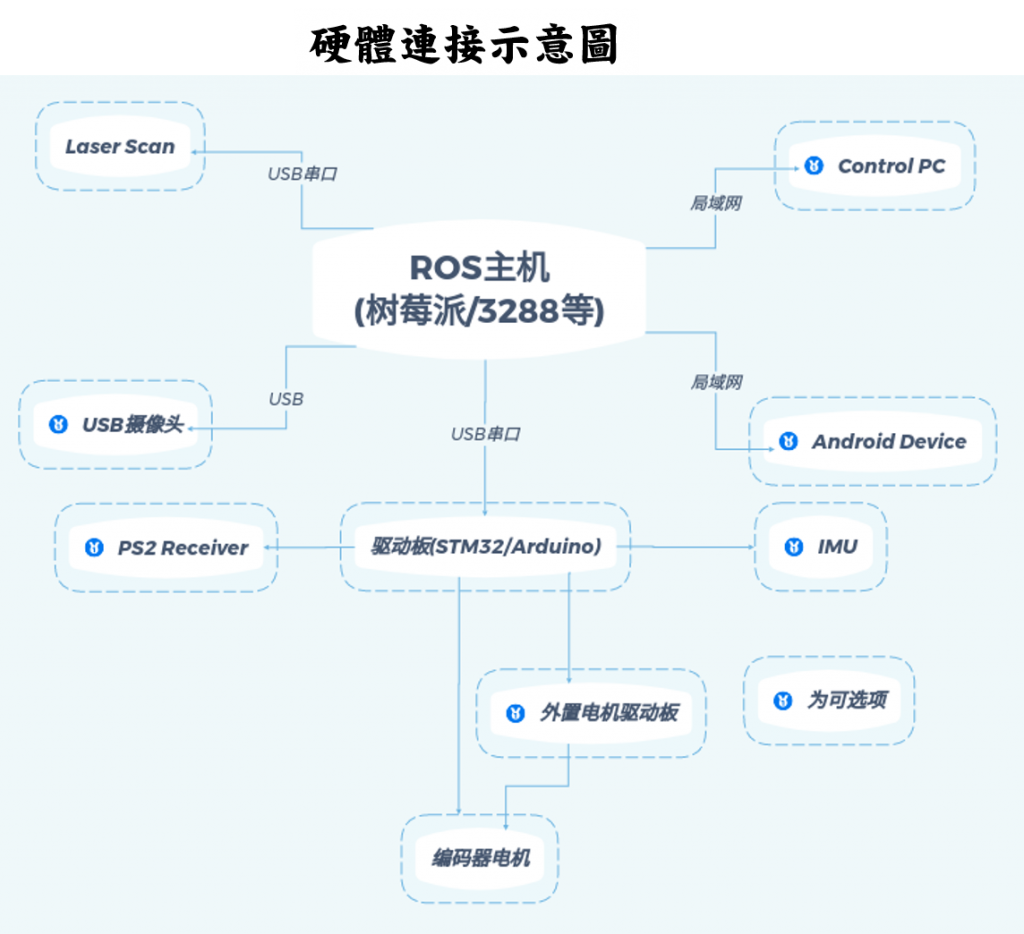
ROS系統則是以Linux Ubuntu為主要作業系統所創建的機器人系統,學習ROS可以加速建立具有自主導航以及多種自主演算功能的機器人,近來被大量用在自主導航機器人、多軸機械手臂以及機台自動化的通訊系統上。本教學設備的功能兼具光達感測器應用學習,ROS自主導航語同步建圖以及視覺辨識的學習,利用樹梅派等控制器搭配Python的語法,提供多種應用範例。
本課程設備費可視預算編列,可搭配 Intel d435i 深度攝影機進行3D深度建地圖與導航或一般 RGB單眼攝影機,教學以OpenCV影像處理、AI深度學習、深度影像點雲為課程主軸展開,可以讓學生徹底學會最新的AI導航定位的技術。
樹莓派設備若您課程原先已經具備,我們亦可幫您省下經費繼續沿用
客製說明:
本公司替不同產業客製化機器人,同時也提供從高中職到大專院校相關科系的教學設備,Arduino、Raspberry Pi (樹梅派)、Nvidia Jetson、嵌入式系統、準系統電腦等控制器,客戶可以自由選擇交由我們整合在設備中。 不同學校、不同課程規劃乃至不同的預算,客戶可依我們現有的內容,要求彈性調整以便適合您學校的教學規劃,我們歡迎在校老師與我們提出課程規劃與需求,再由本公司的菁英團隊快速為您打造專屬的教學課程。
Z機研可根據您的需求提供各種載具的電控整合包括ROS/ROS2 系統、工業4.0、短距離無線遙控、長距離遙控、wifi /4G 視距外遙控、室內精準定位等多種機器人整合技術。我們可提供優質的教學手冊與範例,請參考” 教育套件與創客包“。
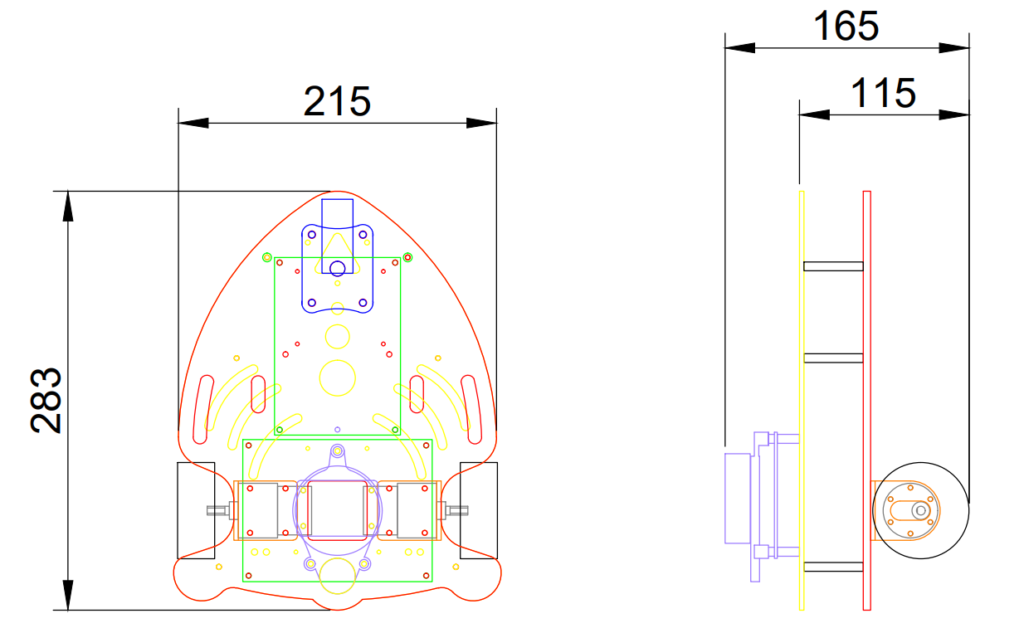
標準尺寸如下 :
課程內容 :
目錄
快速上手與靈活操作篇( 第一篇 ~ 第三篇)
第一篇. 甚麼是光達(LiDAR)地圖導航車?
1-1. 機器人的各種導航應用………………………………………………………….
1-2. 光達(LiDAR)介紹 ……………………………………………………………………
1-3. ROS 的光達地圖導航的特色…………………………………………………..
第二篇. 甚麼是 ROS?
2-1. ROS 簡介……………………………………………………………………………….
2-2. ROS 的應用………………………………………………………………………….
第三篇. 三步驟快速使用你的導航功能
3-1. ROS 導航車介紹……………………………………………………………………
3-2. LiDAR(光達)操作 …………………………………………………………………..
3-3. 三步驟完成地圖導航的巡邏模式 …………………………………………
3-4. 自動閃躲障礙物 ………………………………………………………………….
3-5. 動手寫個 python 程式控制…………………………………………………..
進階系統架構與程式設計篇 (第四篇 ~ 第七篇)………………………………..
第四篇. ROS 導航車環境安裝與設置
4-1. ROS 環境安裝步驟………………………………………………………………..
第五篇. ROS 通訊練習(小烏龜、rqt)
5-1. 小烏龜測試 (turtlesim)………………………………………………………..
5-2. 參考小烏龜的訊息架構(rqt 工具)…………………………………………
第六篇. Python 與 ROS 通訊練習
6-1. 寫一個 Python 程式控制小烏龜直線移動– 鍵入程式………….
6-2. 寫一個 Python 程式控制小烏龜直線移動 – 保存……………….
6-3. 寫一個 Python 程式控制小烏龜直線移動 – 測試……………..
6-4. 寫一個 Python 程式控制小烏龜直線移動– 程式解析………….
6-5. 寫一個 Python 控制小烏龜旋轉– 鍵入程式………………………..
6-6. 寫一個 Python 控制小烏龜旋轉–保存…………………………………..
6-7. 寫一個 Python 控制小烏龜旋轉–測試…………………………………..
6-8. 寫一個 Python 控制小烏龜並 tf 監聽–建立 tf 監聽器…………….
6-9. 寫一個 Python 控制小烏龜並 tf 監聽–創建 start_demo-launch
6-10. 寫一個 Python 控制小烏龜並 tf 監聽–保存…………………………
6-11. 寫一個 Python 控制小烏龜並 tf 監聽–測試…………………………
6-12. 寫一個 Python 控制小烏龜並 tf 監聽–流程…………………………
6-13. 寫一個 Python 控制小烏龜並 tf 監聽–程式解析………………….
6-14. 寫一個 Python 控制小烏龜並 tf 監聽–程式解析………………….
第七篇. Arduino 與 ROS 通訊
7-1. ROS 控制 ArduinoLED……………………………………………………………
7-2. ROS 控制 RC servo 運轉……………………………………………………….
7-3. ROS 超聲波測距與控制 LED…………………………………………………
第八篇. RGBD深度攝影機與V-SLAM (這是選配,需搭配Intel D435i depth sensor 和 Udoo x86主控板)
8-1. rtapmap_ros基礎介紹……………………………………………………………
8-2. 深度視覺建地圖 + 導航 (包含避障閃躲) ………………………………………..
8-3. 深度視覺建地圖 + LiDAR導航 …………………………………………………
8-4. 深度視覺點雲和彩色圖像取得………………………………………………..
第九篇. OpenCV圖形影像處理 (這是選配,可依預算搭配單眼RGB攝影機或Inel D435i depth sensor)
(包括影像處理入門、二值化、擷取影像、顏色空間方法轉換、目標追蹤、人臉辨識)
第十篇. AI深度學習快速上手 (這是選配,可依預算搭配單眼RGB攝影機或Inel D435i depth sensor)
(包括樣本建立與分類、Teachable Machine輕鬆實現影像辨識、進階利用Google GOLAB進行轉移訓練學習、Yolo V3圖片目標辨識、Yolo V3結合ROS目標檢測)
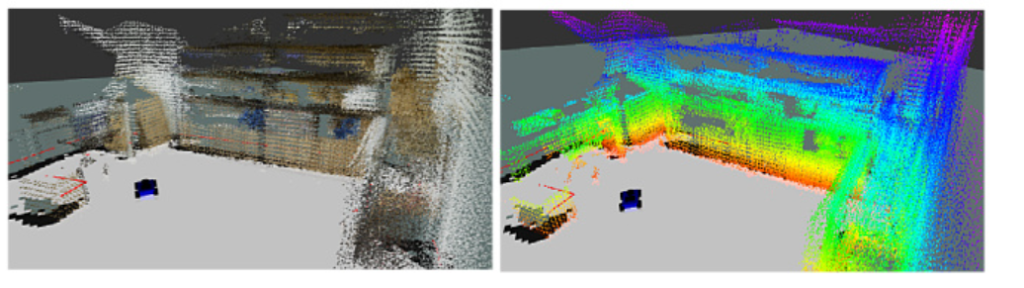
深度視覺建地圖 + 導航
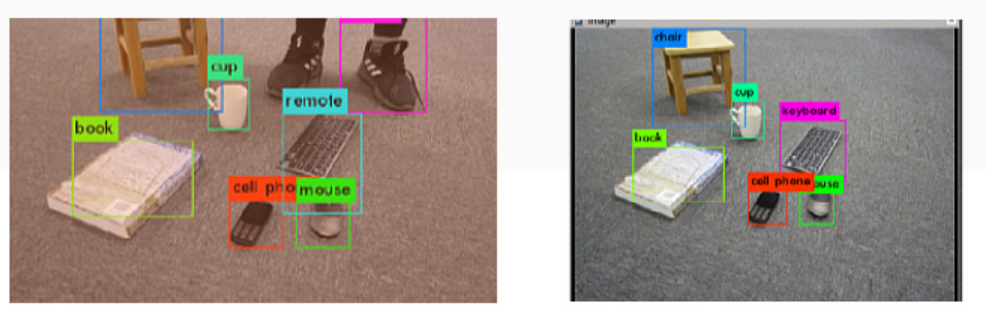
Yolo V3圖片目標辨識