








Description
商品說明 :

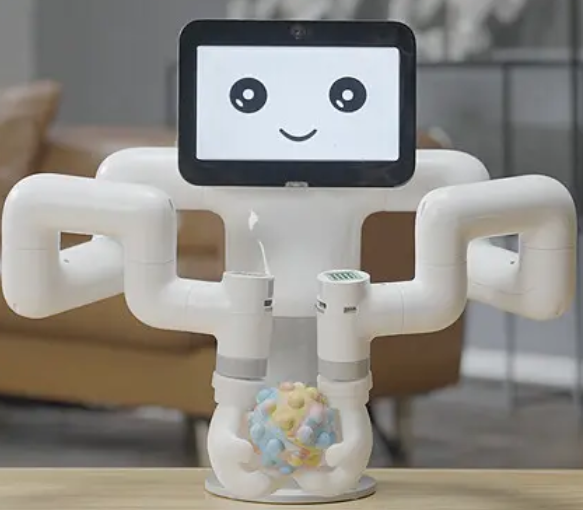
最具成本效益的雙臂協作機器人
- 樹莓派為基底的控制器
- 雙臂13軸人形協作機器人
- 若你跟我們一樣開發無人載具,這款適合放在車載上,直流24V供電
- 前端負載 payload 250g
- 7英寸交互式顯示屏和兩個200萬像素高清攝像頭
- 單臂運動半徑(手臂長度)可達28 cm
- 提供3.3V I/O接口和樂高接口,提供吸泵、夾具等多種配件配合使用,滿足不同應用的需求
- 良棋科技可提供學術單位額外的專業整合包括 Kinect DK手勢辨識、ROS MoveIt控制與教程、AR和IoT擴增實境與物聯網操控的高科技成果
開源研究教育機器人
myBuddy整機運動控制驅動庫開放,關節角控制、坐標控制等100多個控制接口。因此,用戶可以實現機器人運動路徑規划算法研究、雙臂干擾規避算法研究、機器人視覺學習等人工智能應用開發。 myBuddy有效幫助開發者和學生提升個人科研能力。

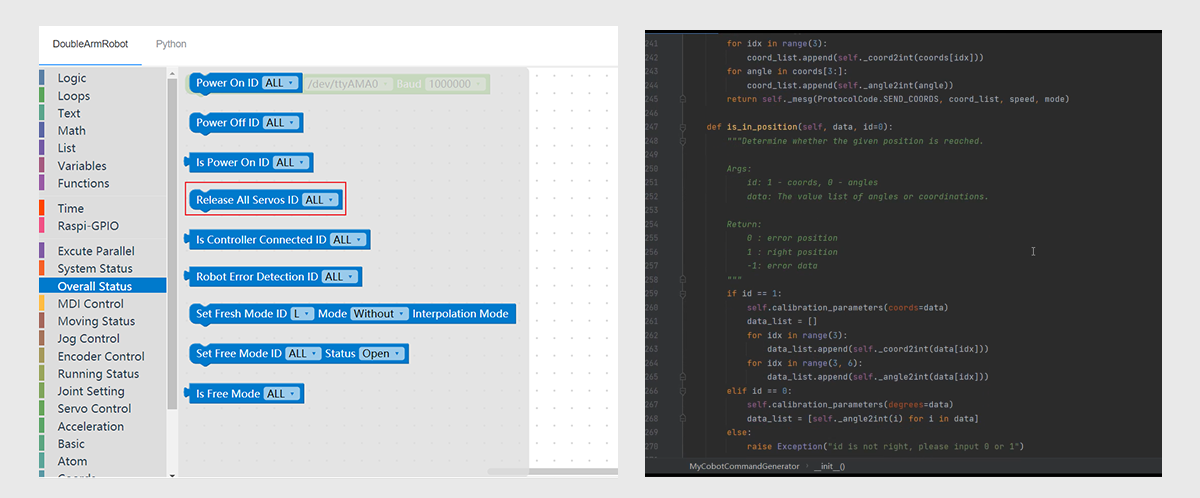
可視化開發環境
可以實現人工智能抓取的學習和教學。標准人工智能相機接口。下方45度攝像頭支持區域定位、物體識別和二維碼識別。另一個攝像頭可以實現面部和身體識別。

機器人玩家的創意之旅
打開底部控制界面,電位值、角度、坐標、運行速度等界面可自由控制。可實現雙臂機器人的應用研究、運動路徑規劃、動作開發和視覺識別。豐富的接口可以滿足商業用途和教育用途的多種應用。

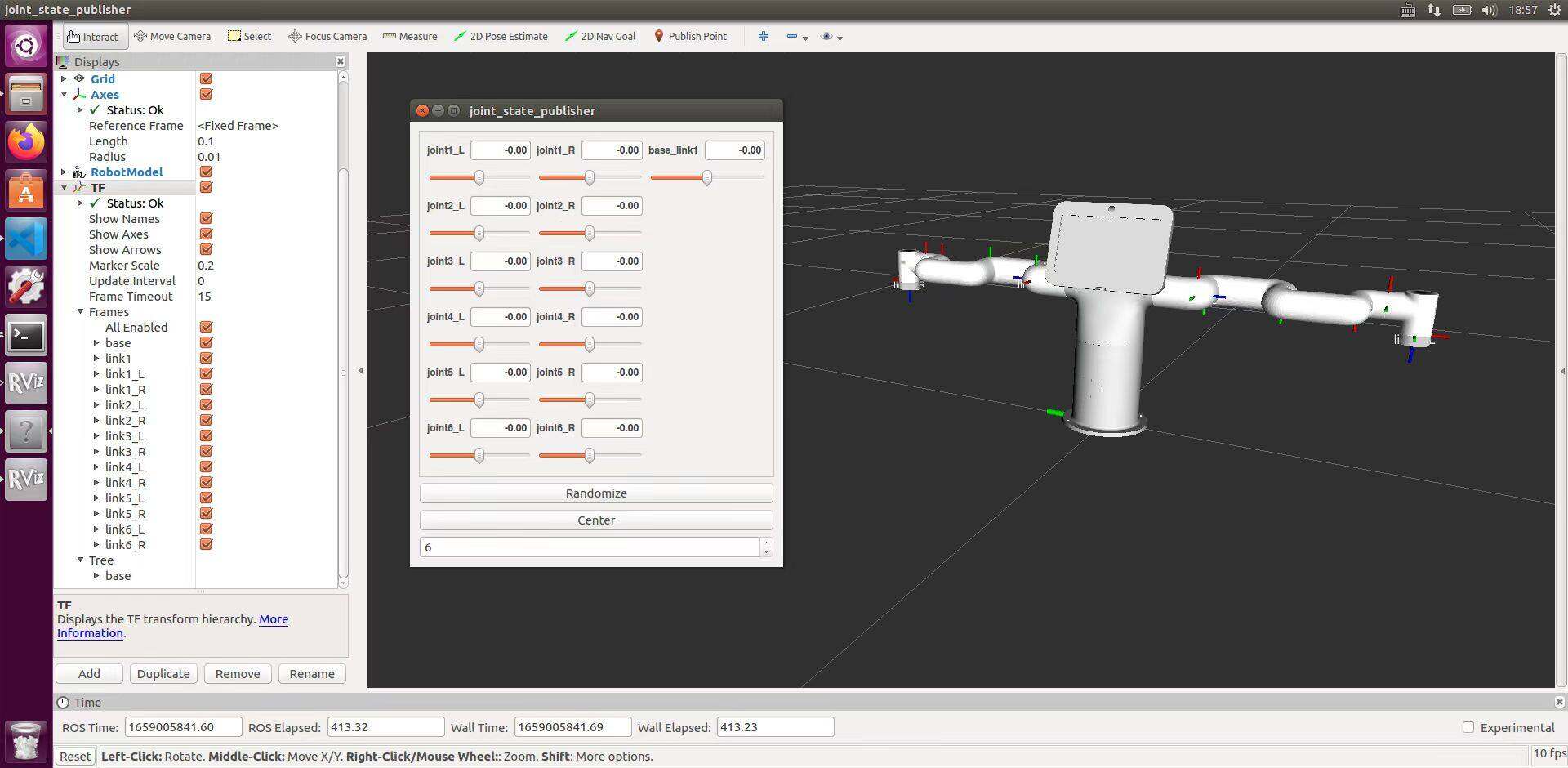
ROS學習應用機器人系統
內置ROS開發環境,提供RVIZ和MOVEIT中的多種案例,如移動跟隨、滑塊控制、路徑規劃等高級應用。機器人URDF配置文件是開放的,用戶可以進行二次修改開發。

搭載可程式控制的移動底盤
可使用遙控、視覺引導控制或其他路徑控制的演算法,可作為服務型機器人、送餐機器人、工業搬運機器人等教學示範平台。

開源控制 (Open Source)
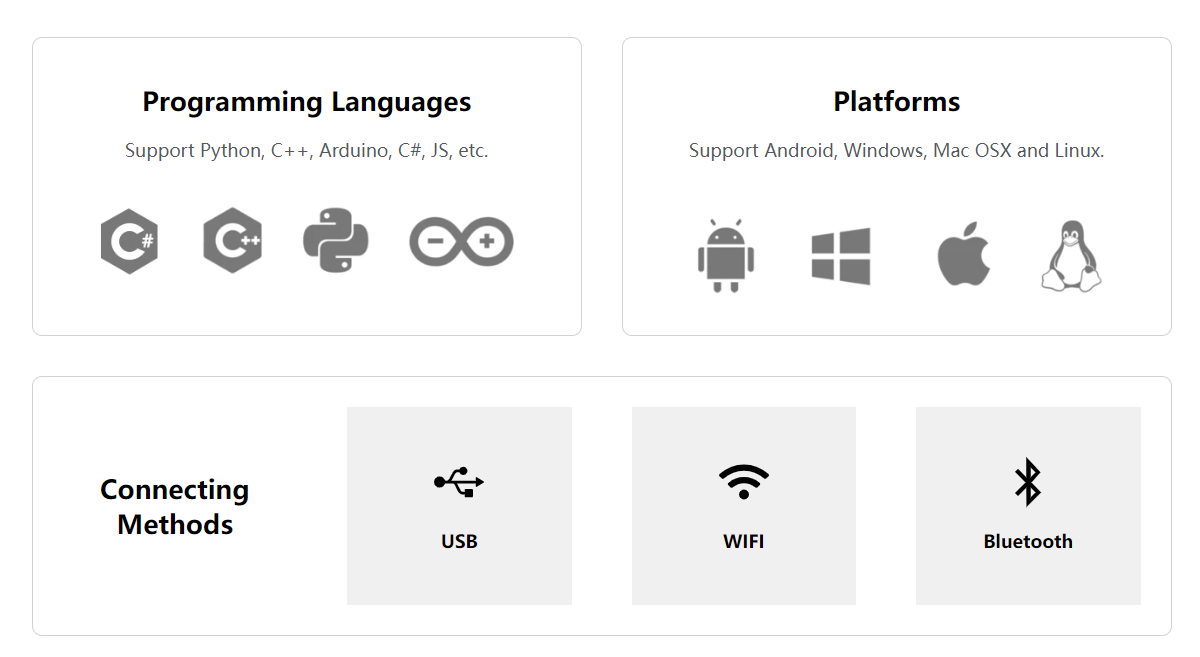
支持ROS開發環境
ZanRobot (Z機研)提供ROS自主導航、可程式控制機器人、機器人學習套件、戰術與特種用途機器人的設計研發與維護保養,並提供優異的客製化品質。從客製化載具到物聯網感測器的解決方案,為您提供一站式的智慧機器人平台。



