



Description
商品說明:
精彩的Youtube 產品說明(拆箱記錄、如何使用、PID控制與比較、馬達比較)精彩 ! 本文最下面喔 !
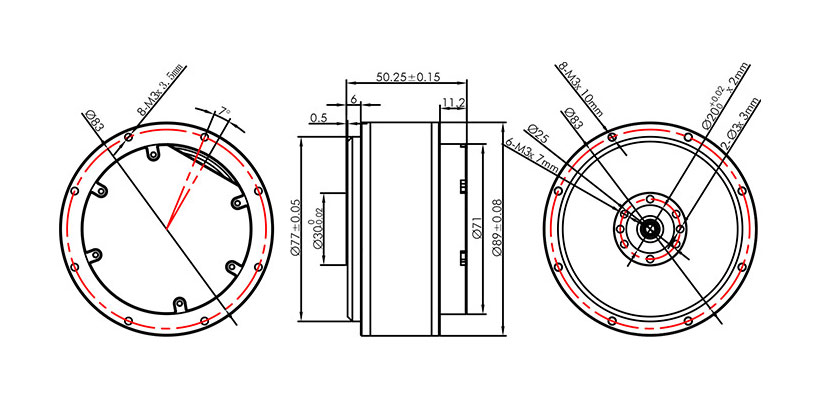
AK70-10模組馬達基礎參數:
使用電壓:48v
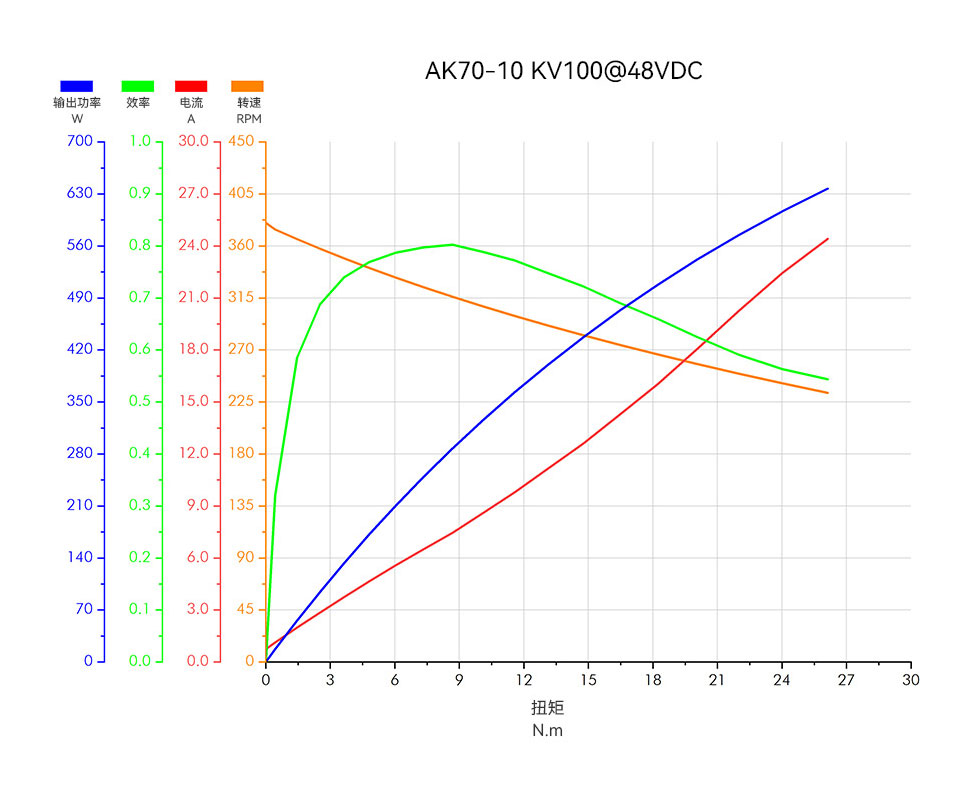
額定圖:8.3NM
額定轉速:310rpm
| 應用領域 | 足式機器人,外骨骼,AGV | 峰值扭矩 Nm | 24.8 |
| 驅動方式 | FOC | 峰值電流 ADC | 23.2 |
| 工作環境溫度 | -20℃~50℃ | 速度常數 rpm/V | 100 |
| 線圈接法 | Delta | 扭矩常數 Nm/A | 0.123 |
| 絕緣等級 | H | 反電勢常數 V/krpm | 11.2 |
| 絕緣耐壓 | 1000V 5mA/2s | 線電阻 mΩ | 272 |
| 絕緣電阻 | 1000V10MΩ | 線電感 μH | 113 |
| 相數 | 3 | 轉動慣量 gcm² | 414 |
| 極對數 | 21 | 電機常數 Nm/√W | 0.24 |
| 減速比 | 10:01 | 機電時間常數 ms | 0.74 |
| 反驅扭矩 Nm | 0.48 | 電氣時間常數 ms | 0.42 |
| 背隙 ° | 0.12 | 重量 g | 521 |
| 溫感 | NTC MF51B 103F3950 | 最大轉矩密度 Nm/kg | 47.6 |
| 噪音dB距離電機65CM | 58 | CAN 介面對應 | A1257WR-S-4P |
| 基本額定動載荷 C N | 2000 | UART 介面對應 | A1257WR-S-3P |
| 基本額定靜載荷 C0 N | 2520 | 電源介面對應 | XT30PW-M |
| 額定電壓 V | 24/48 | 內環編碼器類型 | 磁編 |
| 額定扭矩 Nm | 8.3 | 內環編碼器解析度 | 14bit |
| 額定轉速 rpm | 148/310 | 外環編碼器類型 | – |
| 額定電流 ADC | 7.2 | 外環編碼器解析度 | – |
| 編碼器數量 | 1 |
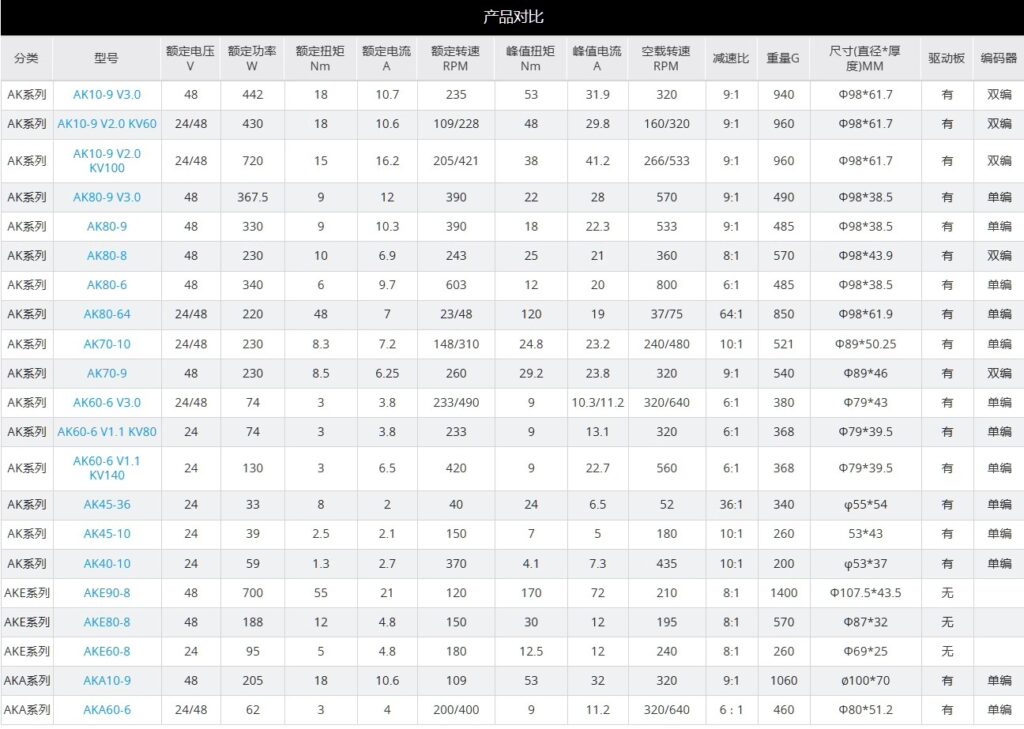
AK系列選型表
其他各式下載資源和使用方法影帶, 請參考這
Z-機研 (良棋科技)從智慧移動載具到物聯網感測器的解決方案,為您提供一站式的智慧物聯網平台。
包括特殊作業場所移動式機器人、管道或下水道監測機器人、懸吊或吊掛式移動監測載具、森林或農園地移動式監測、工地或野外遠端感測監測



