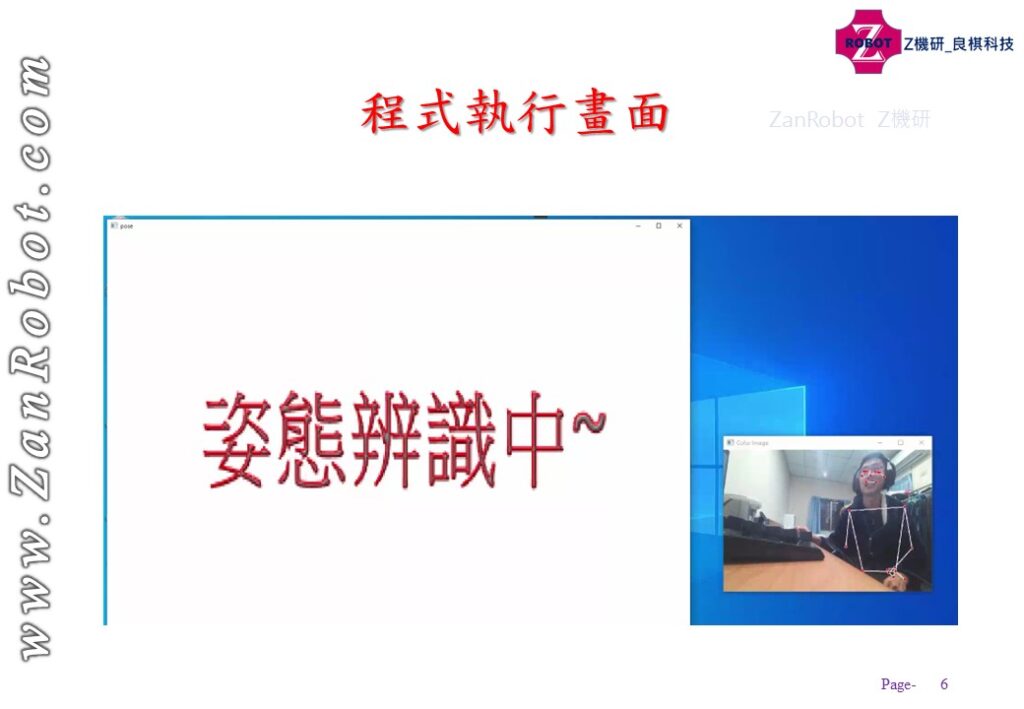
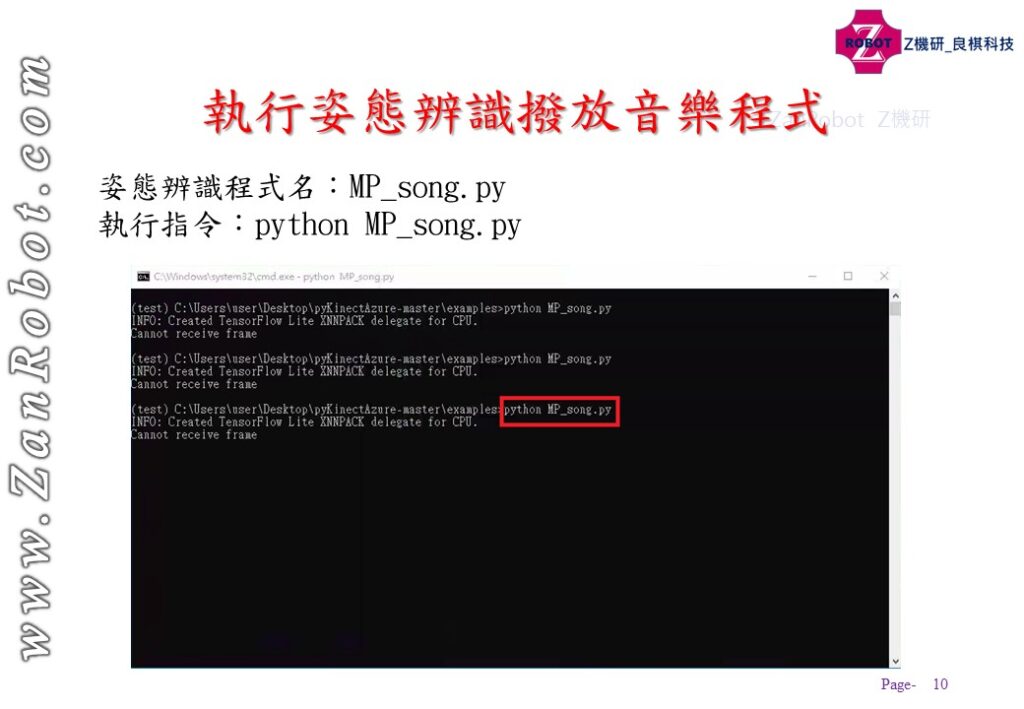
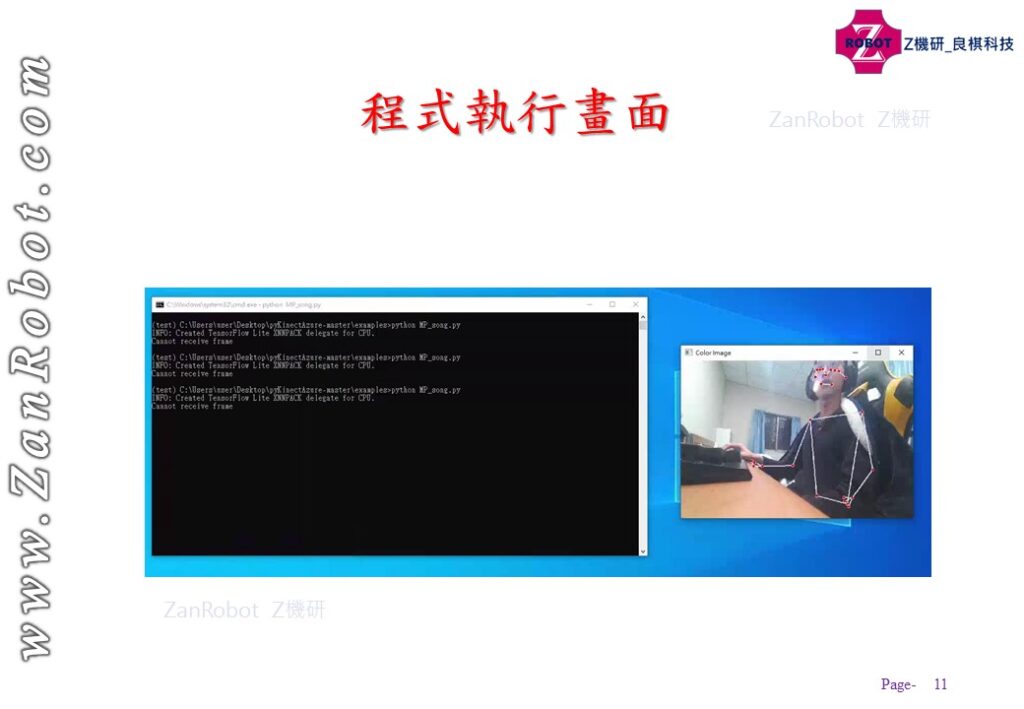
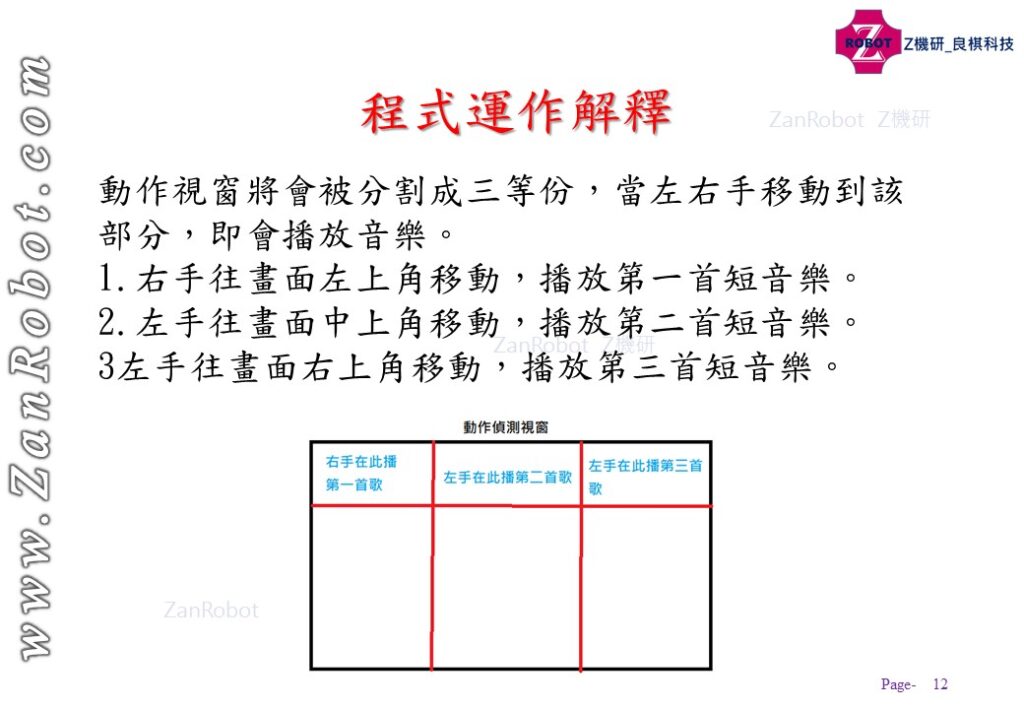
Azure Kinect DK 辨識姿態, 使用python程式 Posted on December 24, 2022December 24, 2022 by ZanRobot 服務員 Post navigation ← 在Virtual box中的Arduio IDE測試esp32的教學範例