






前輪後驅重載車
產品型號 : ZC005
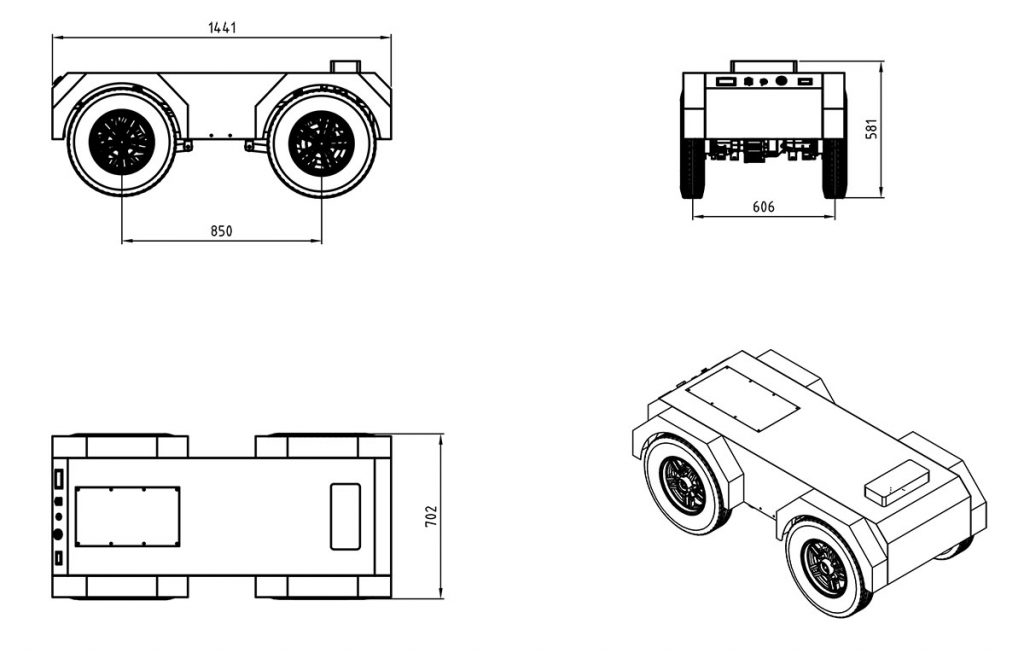
底盤採用了車規級全線控技術,並向使用者完全開放底盤CAN通訊協定。可搭載各類感測器、雷達等設備,車身設有大功率電源介面。這些設計上的周密考慮都使其成為一個開放式的控制平臺,便於供應鏈廠商進行低成本的二次開發。該底盤尺寸:1440mm*830mm*580mm,車身噴塑處理,外觀美觀,表面堅固、耐腐燭。選用四輪雙橫臂獨立懸架系統及前橋阿克曼轉向系統,底盤的操控穩定性得以大幅提升,並搭載4組剛度可調節的減震器,底盤最大負載能力達到300KG。採用高能量密度磷酸鐵鋰動力電池,雙伺服電機獨立驅動系統,伺服馬達轉向系統,底盤快速開發控制器及CAN網路通訊系統等。控制系統及執行元件達到車規級需求,相應速度快,回饋精度高。
車身預留多種協定的通訊介面,及多種電壓的供電介面,實現隨插即用,滿足市面常見的雷射雷達、影像系統、雲台、工控機的供電及通訊需求,方便使用者進行無人駕駛車輛開發。目前已被廣泛使用在物流、運輸、清掃、巡邏等領域,成為適用於特定場景下各種無人駕駛車輛通用的智慧底盤平臺。



小型四驅重載車
產品型號 : ZC006
可以根據實際需求配置可見光、紅外、紫外、局放、雜訊、振動等多種檢測手段,讓機器人與設備不需要“翻譯”就能順利“對話”,準確測得主變振動、溫濕度等資料.
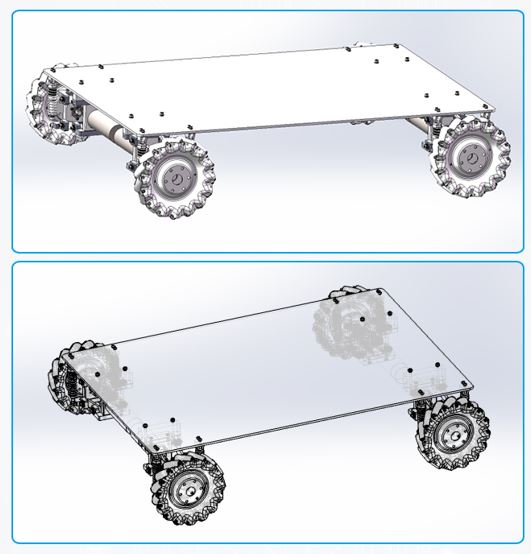
小型四輪驅動底盤,尺寸與空間絕佳匹配,適應各類應用場景,工安巡檢,電力巡檢,管道探傷,遠程監控。森林防火,車體搭載高精度電機,實現5mm範圍內導航停位誤差,運行精度高,優質天然橡膠輪胎,降低設備震動與增加車體穩定性,更適合超高精度導航定位使用,是巡檢,物流 ,安防行業首選方案 。解決了巡檢機器人應用中由於底盤穩定性差,輪胎易磨損,配件故障率高等問題。
我們有提供多種智慧機電整合的方案,例如可使用機器人ROS系統,實現Navigation(導航)、manipulation(操作)、perception(感知)、cognition (認知)等功能與特性。可搭配的控制系統除了 以 x86平台的PC-based系統外,也提供Jetson Nano的AI platform 等嵌入式系統。

全客製全向輪底盤
產品型號 : ZC007
考慮到學術研究單位因為載具的需求不一,我們特地讓客戶可以藉由客製的需求,打造一台心目中的研究載台。如何選擇和下單 ?
請訂購時,利用 email 或是告訴我們服務人員,以下訊息即可
- 車體載重需求 ? (我們只訂作載重大於 5Kg 以上 ~ 100Kg 以下)
- 車體行進最快速度 ? 單位 m/sec
- 車體最大尺寸 ? 用投影面積說明 長 x 寬
- 輪胎使用 ? (一般膠胎輪或麥肯納姆全向輪)
- 遙控方式 ? (各種無線都可, 藍芽、wifi、zigbee、RF射頻、LoRa、行動4G)
- 運動控制 ? (說明搭配那種馬達或是否需要定位? 定位精度要求 ? 若不確定建議不要填寫)
- 控制系統 ? (我們提供 x86 Windows 控制、Linux嵌入式控制)
- 額外搭載裝置 ? (若是您有需要搭載的裝置,如Laser scanner、感測器、機械手臂等等,可以在此說明)