Description
商品說明 :
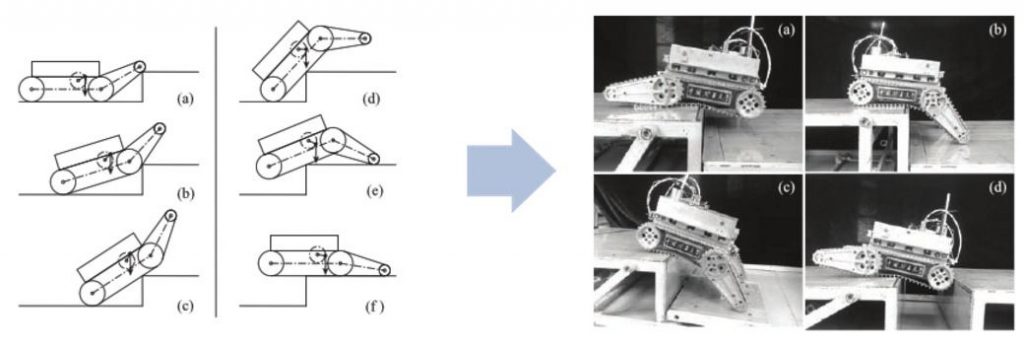
前蹼履帶機器人(Flipper Arms) 底盤大約長650mm、寬550mm、高160mm,重25kg,採用2擺臂+履帶行走結構,履帶和擺臂適合複雜地形,可以提高越障性能。行走速度為1.5米/秒,整車尺寸較小,重量輕,可快速完成現場部署。出色敏捷移動性能,超強越障爬坡能力,可自由搭配需要的控制系統,我們可根據客戶需求客製軟硬體系統,完成不同場域的需求。
該機器人底盤整車防爆工藝處理。與多種配件一起使用,包括攝像頭,機械臂,銷毀器,X射線,爆炸物的遠端引爆控制系統。機器人底盤可實現有線、無線控制,在干擾環境下採用有線控制。配備高清攝像頭,即時動靜抓拍取證。搭配機械臂堅固耐用,移動平臺堅固可靠,從容應對需要高底盤,更快機動性的室內和戶外等極端地形的操作。底盤垂直負載20KG,在滿足預定軌跡,特定環境下,能夠持續承擔高負載工作,保質保量實現既定目標。該機器人底盤結構堅固、輕巧,防塵、防水、防震、防爆、防腐蝕。
我們更可提供目前學術教學與研究用的開發平台與控制器,PC based、Linux on 樹梅派 raspberry pi、Jetson Nano for AI training 搭載 Intel D435 depth sensor 做為室內定位或其他LiDAR sensor。開發過程與程式源碼都可提供程式和二次開發
所有電控系統(包括控制核心、驅動器、電源、遙控系統、人機操作介面)均可以選配,若採用ROS控制的機器人系統可以完成自主導航、避障加上深度學習(Deep Learning)等功能,提供您在教學與研究上更精進的選擇。
標準規格 :

控制系統 : (您也可以直接買載具機身,不要電控)
請參考我們提供的全方位控制系統選搭,在您購買載具機器人後,可以前往機器人控制系統類別中,選擇您要的控制方式與客製化服務。本產品網頁報價均不包含控制系統。

文件和學習資源:
輕量化的前蹼擺臂履帶機器人,學術研究用,歡迎訂製 ~
影帶和照片 :
(無)