
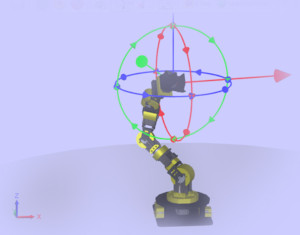
Cute 工廠教學用的機械手臂
型號 : ZA401
完全支援ROS功能;可二次開發,支援機器人演算法研究;七自由度,靈活小巧;易操作;多用於機器人教學和研究方面 ; 提供完整的教學訓練。
 |
|
技術參數
| 自由度 | 7 |
| 重量 | 1.6kg |
| 最大負載 | 300g |
| 臂 長 | 506mm |
| 工具速度 | 100cm/s |
| 關節最大轉速 | 30Rpm |
| 重複精度 | ±0.5mm |
| 通訊協定 | Modbus/自訂協議 |
| 夾爪最大力 | 35N (約3Kg) |

快速教導
可透過人手移動,快速記憶位置與運動路徑
提供開源程式環境
可供使用者進行二次開發,open source 整合平台與開發設計

全七軸自由度
靈活運動,操作自由
Elfin協作機器人
型號 : ZA402
完全支援ROS功能;可二次開發,支援機器人演算法研究,靈活部署,手持教導快速操作,支援協作規範與操作者的安全防護。

技術參數
| 型號 | E3 |
| 重量 | 17kg |
| 最大負載 | 3kg |
| 工作範圍 | 590mm |
| 功耗 | 運行經典程式時約100W |
| 關節範圍 | J1-J6 135°/S |
| 關節最大速度 | ±360° |
| 工具最大速度 | 1m/s |
| 重複精度 | ±0.05mm(在通常情況下) |
| 自由度 | 6 |
| 控制櫃尺寸 | 536*445*319mm |
| 末端I/O埠 | 數位輸入:4;數位輸出:4;模擬輸入:2 |
| 電箱I/O埠 | 數位輸入:16;數位輸出:16;
模擬輸入:2;模擬輸出:2 |
| I/O電源 | 24V/2V |
| 通訊 | TCP/IP |
| 程式設計 | 圖形化程式設計,遠端調用介面 |
| 防護等級 | IP54 |
| 協同操作 | 10個高級安全配置功能 |
| 主要材料 | 鋁合金 |
| 工作環境溫度 | 0-50℃ |
| 外部電源輸入 | 200-240V AC,50-60HZ |
| 電纜 | 連接控制櫃的電纜:5m,連接示教器的電纜:5m |

工業等級
可透過人手移動,快速記憶位置與運動路徑

搭配各式夾爪
可供使用者進行二次開發,open source 整合平台與開發設計

全六軸自由度
靈活運動,操作自由

支持ROS
開源ROS介面,使用者可以在ROS環境下通過EtherCAT即時控制機器人關節。利用ROS平臺,極大地提高機器人的可擴展性,
並且可以不必依賴控制箱來控制機器人

操作更簡單
將機器人末端拖動到所需要的位置,或者直接拖動機器人畫出所需要的軌跡,即可輕鬆示教機器人,極大地節省了程式設計示教的時間。設置一個簡單的拾取和放置的程式只要10分鐘

全七軸自由度
Elfin系列機器人具備協作性能,在碰到阻力時能夠立刻保護性停止,保障了協同同作者、工件和生產設備的安全