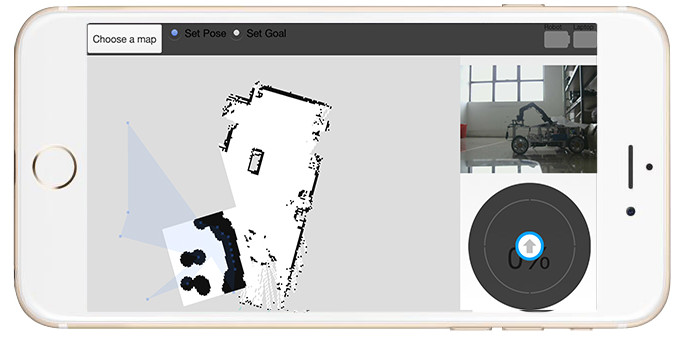
(手機App操作ROS)
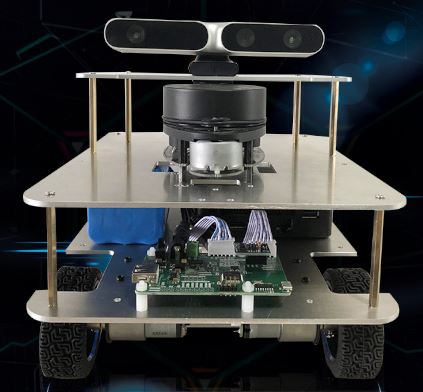
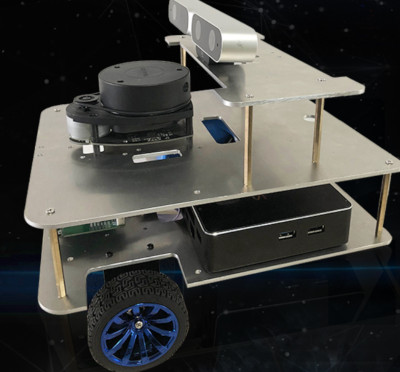
ROS兩輪驅動機器人平台
(載重30Kg)
產品型號 : ZA201
提供各種底盤驅動模型的ROS機器人套件可廣泛用於企業前期開發驗證、院校教學研究,一體高度整合的硬體驅動模組。提供各種類型的驅動模組,簡單明瞭的軟體設計框架,完善的服務支援,讓每一個客戶能夠快速上手ROS機器人作業系統及高效的進行二次開發
功能介紹
| 1 | ROS里程回饋 |
| 2 | 動態PID參數調、電機PID調速 |
| 3 | IMU9軸的AHRS Madgwick姿態演算法 |
| 4 | 採用擴展卡爾曼濾波(ekf)多感測器姿融合演算法 |
| 5 | 線速度與角速度校正 |
| 6 | IMU filter自動校正 |
| 7 | 雷射雷達構建地圖,支持gmapping、hector、google的Cartographer、karto演算法構圖 |
| 8 | 谷歌的Cartographer演算法轉換成網格地圖並用於自主導航功能 |
| 9 | 支援鍵盤、滑鼠、選擇區域構建地圖 |
| 10 | 室內自動導航、動態避障、AMCL室內定位功能 |
| 11 | 基於攝像頭的人臉、眼睛識別、人物身份識別功能 |
| 12 | 集成Opencv的常用邊緣檢測、Camshift、goodfeature等常用功能 |
| 13 | 基於深度攝像頭的視覺構建地圖、導航功能 |
| 14 | 深度攝像頭的自動跟隨功能 |
| 15 | 基於雷達的自動跟隨功能 |
| 16 | 基於攝像頭的單線尋線功能 |
| 17 | 支援Android手機建圖及導航、及圖像傳輸功能 |
| 18 | 支援PS3手柄控制功能 |
| 19 | 支持多點導航 |
| 20 | 支援電壓監測及低壓報警 |
| 21 | 開機自啟動功能 |
手冊 | 教育訓練預約
性能
| 車體尺寸 | 480*360mm (可調整) |
| 最大載重 | 30KG |
| 最大線速度 | 0.8m/s |
| 最大角速度 | 5rad/s |
| 驅動模型 | PID差速驅動 |
| ubuntu系統 | ubuntu mate 16.04 |
| ROS系統 | ROS Kinetic |




ROS室外導航自動駕駛機器人
產品型號 : ZA301
是一款室內外均可流暢作業的機器人移動底盤,具有強通過、高負載、高精度、高擴展、動力足和續航長等特點,可跨平臺開發,支援多種應用場景。
該平臺上可集成雷射雷達、攝像頭、GPS等感測器,雲台、機械臂、抓持器等附件設備,基於平臺可實現SLAM自主路徑規劃導航、障礙物避障等功能,適用於巡檢、抓取、智慧駕駛、協同控制、電腦視覺、深度學習等技術的研究與應用。
該平臺提供底層驅動和基於ROS平臺的API介面,精准的PID控制與運動模型,方便您的硬體集成和二次開發。
影帶視頻 |
性能
-
支持ROS 是 尺寸 726*617*273mm 最大速度 0.8m/s 負載能力 直線50kg/原地轉彎30kg 適用地形 全地形 垂直越障能力 8cm 爬坡能力 25° 續航時間 2.5h/4h (選配) 驅動轉向 四驅差速轉向 控制方式 手柄/上位機串口 支援系統 Windows/Linux/MacOX 支援平臺 X86 手柄控制 20m 手柄通信 2.4Ghz
訂購時請填下表或 email 給我們 :
Things To Know
跟我們訂購的三大好處,(1)我們的開發技術支援 (2)與原廠一樣的產品保固與送修 (3)有發票可報帳
我們提供機器人平台整合的實務經驗,包含ROS系統、Linux / windows等室內定位室內定位應用服務,整合應用服務。
sales@zanrobot.com
技術問題可線上洽詢或
加入Line隨時隨地可留言與討論 !