Description
商品說明:
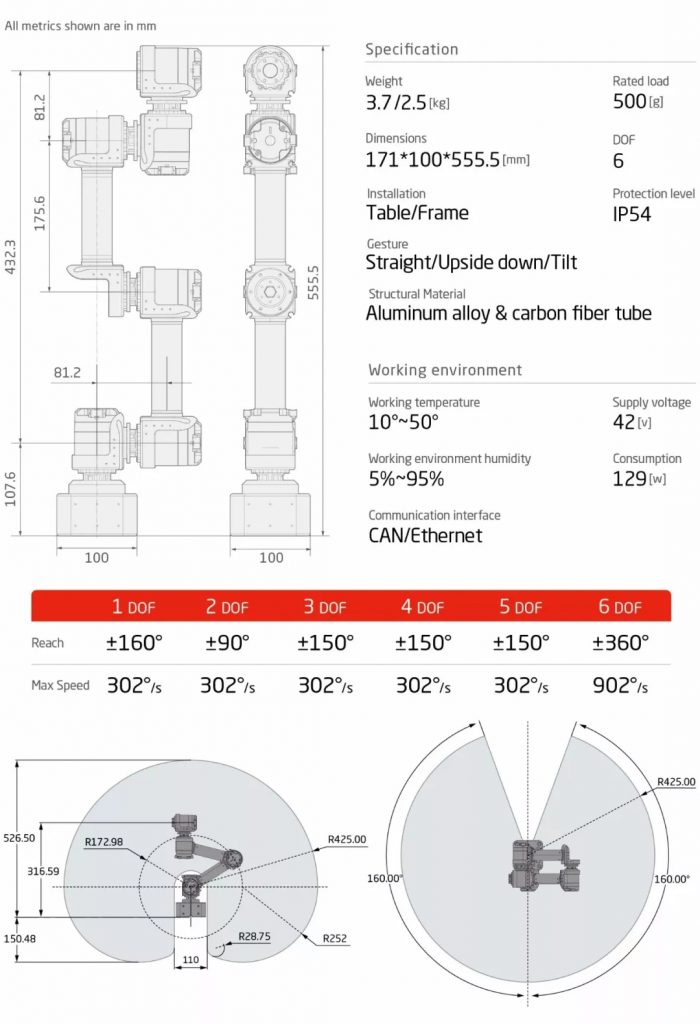
這是一個前端最大覆載 1.2Kg的模組化6軸機械手臂,採用高精度伺服馬達、位置編碼器和伺服控制器可以完美地展現高速、高精度和人性化動作的要求。
機器人採用Quasi-Direct Drive (QDD) 類直驅無刷馬達,不但可以降低成本、增加運動速度和優化控制的特性,更可以實現機器人機構設計的靈活性。
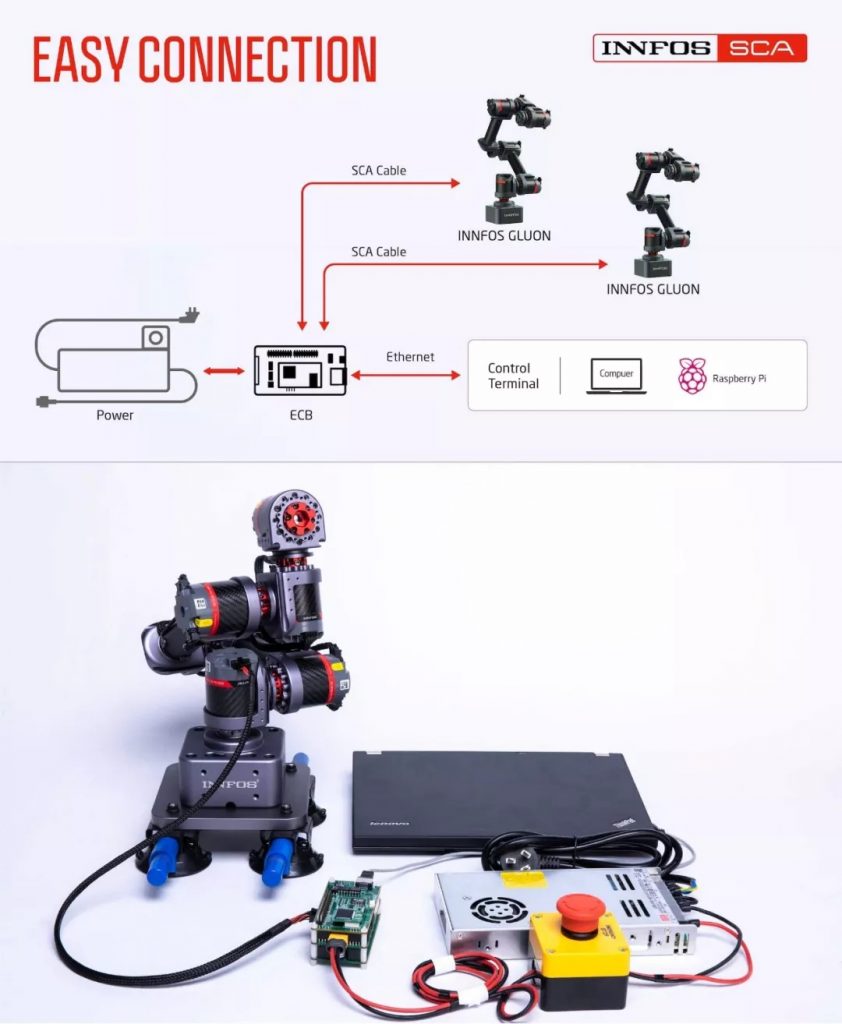
INNFOS SCA(Smart Compliant Actuator)是一種智能,高度集成和先進的伺服系統,可進行靈活和安全的控制。它高度集成了伺服馬達,伺服驅動器,減速器和編碼器的核心部件。在相同性能下,其體積僅爲傳統伺服系統的十分之一。SCA採用隔離CAN通信,具有更加安全可靠的電氣性能,同時也可通過CAN總線進行SCA的固件升級。與傳統的機器人驅動相比,SCA是一項革命性的突破。它有效地解決了各類機器人多關節連接的結構問題,保證了服務機器人的聯合控制和安全使用。這使得服務機器人能夠與人類一起工作和生活,這爲第四次工業革命和即將到來的智能機器人時代提供了重要的核心技術。
可搭配課程名稱 : 從零開始 : ROS在 innfos手臂的安裝、設定、操作
使用時間共兩天 : (購買後贈送 4Hr 線上課程)
第一天 :
第1, 2小時 : ROS安裝在”自己”的筆電
– ROS應用說明, 為何要用ROS
– VM安裝
– ROS安裝
第3小時 : ROS工具使用( turtlesim、moveit、rviz)
– 測試小烏龜 (turtlesim)
– rviz顯示手臂模型
– moveit操作手臂
第4小時 : ROS通訊練習-1 (Arduino 、 ROSserial)
– Arduino 安裝與操作
– 基本Arduino練習 (LED控制、馬達控制、感測器接收)
第5小時 : ROS通訊練習-2 (node間通訊)
– publish、subscribe messages
– 控制LED
– 控制servo motor
– 接收超音波值並控制LED
第6小時 : 使用者介面下命令控制手臂
– moveit commander 下命令
– innfos ROS package 使用
– ROS meaasages、publish/subscribe topic
第二天 :
1. 第1小時 : matlab, d455安裝與環境設定
2. 第2 -3小時 : 影像範例包括影像處理(官方以及用在手臂上的)
– Object Counting、Object Detection Using YOLO v3 Deep Learning
3. 第4 -5 小時 : 深度資料範例教學
– 深度轉3D、顏色分群、3D目標分割、3D目標內插補點、計算機械手臂抓取3D目標所需的特定位置座標點
4. 第6小時 :手臂控制教學 (包含URDF編修方法)
支援教育型設備所需的功能,如python,ROS、Linux和windows安裝,raspberry pi 等等,資源下載看這

INNFOS Gluon的碰撞檢測功能確保了人機交互的安全性。SCA擁有電流控制,如果電流輸出超出閾值,機械臂會停止移動。Gluon可以做到接觸人體時自動停止工作,並在阻礙消失後繼續工作。

重力補償模式下單擺處於類似失重狀態,可以輕鬆轉動(零力控制),這種方式可以用於示教,示教是人機協作的主要方式之一。